ERRORS. 2. Diffraction of electromagnetic waves at aperture stop of the lens. telephoto lenses. 5. Row jittering synchronization of frame buffer
|
|
|
- Noel Small
- 5 years ago
- Views:
Transcription
1 ERRORS סטיה העדשה (Hubble) 1. Lens Aberration 2. Diffraction of electromagnetic waves at aperture stop of the lens למקד 3. Defocusing תנועות ותנודות של המצלמה 4. Motions and vibrations of the camera telephoto lenses תנועות ותנודות של הגוף - טשטוש motion of the object, blur 5. Row jittering synchronization of frame buffer שידור רע לאורך קווי וידיו 6. Bad transmission along video lines הדים Echoes הפרעות אלקטרוניות 7. Electronic interference fixed and moving patterns רעש במעגלים דיגיטליים 8. Noisy digital circuits שגיאות אקראיות individual bits flip - random errors מערבולת האטמוספירה 9. Atmospheric turbulence
2

3
4 What is a Point Spread Function? The PSF of an optical system is the irradiance distribution that results from a single point source in object space. A telescope forming an image of a distant star is a good example: the star is so far away that for all practical purposes it can be considered a point. Although the source may be a point, the image is not. There are two main reasons. First, aberrations in the optical system will spread the image over a finite area. Second, diffraction effects will also spread the image, even in a system that has no aberrations. optical transfer function The optical transfer function (OTF) of an imaging system ( camera, video, system, microscope etc.) is the true measure of resolution (image sharpness) that the system is capable of. The common practice of defining resolution in terms of pixel count is not meaningful, as it is the overall OTF of the complete system, including lens and anti-aliasing filter as well as other factors, that defines true performance. In the most common applications (cameras and video systems) it is the Modulation Transfer Function (the magnitude of the OTF), that is most relevant, although the phase component can have a secondary effect. While resolution, as commonly used with reference to camera systems, describes only the number of pixels in an image, and hence the potential to show fine detail, the transfer function describes the ability of adjacent pixels to change from black to white in response to patterns of varying spatial frequency, and hence the actual capability to show fine detail, whether with full or reduced contrast. An image reproduced with an optical transfer function that 'rolls off' at high spatial frequencies will appear 'blurred' in everyday language. Modulation Transfer Function or MTF (the OTF magnitude with phase ignored) is roughly the equivalent of frequency response in an audio system, and can be represented by a graph of light amplitude (brightness) versus spatial frequency (cycles per picture width).



5 Dr. Yoram Tal FFT Demo Masked part of the FFT Source image Central part of the FFT 81 Dr. Yoram Tal Image Deblurring (Deconvolution) Problem: how to undo blurring & recover the sharp image? 82 41
6
7
8
9

10
11
12
13

14

15

16

17

18

19
20
21
22
23
24
25
26
27 Approximation Theory Given a Hilbert space H with an inner product (, ) we de ne d(' 1 ; ' 2 ) = jj' 1 ' 2 jj = p (' 1 ' 2 ; ' 1 ' 2 ) Given a subspace S H with a basis ( 1 ; 2 ; ; :::; n ) P Any b' 2 S can be written as b' = n i i. i=1 Problem: Given ' 2 H nd b' 2 S so that jj' b'jj is a minimum Solution: Choose ' so that (' b'; v) = 0 for every v 2 S 1
28
29 or using the cross-correlation h i R fg (x; y; ex; ey) = E bf(x; y)g(ex; ey) R gg (x; y; ex; ey) = E [g(x; y)g(ex; ey)] R fg (x; y; ex; ey) = RR R gg (x; y; ex; ey)m(x; x ; y; y)dxdy image This is still very di cult so we assume that all the statistics are homogeneous and invariant. So Then R fg (x ex; y ey) = RR Fourier transform yields but from (*) we have R fg (x; y; ex; ey) = R fg (x ex; y ey) R gg (x; y; ex; ey) = R gg (x ex; y ey) R nn (x; y; ex; ey) = R nn (x ex; y ey) m(x; x ; y; y) = m(x x y y) image R gg (x ex; y ey)m(x x ; y y)dxdy = R gg (x ex; y ey) m(x; y) S fg (u; v) = S gg (u; v)h(u; v) g(x; y) = RR h(x; x ; y; y)f(x; y)dxdy+n(x; y) = RR h(x x ; y y)f(x; y)dxdy+n(x; y) and in Fourier space G = HF + N 3
30 Wiener Filter Notation: f(x; y) = "original" picture g(x; y)= "actual" picture bf(x; y) = estimate to f(x; y) Assumption: the noise is additive. So (*) g(x; y) = RR h(x; x ; y; y)f(x; y)dxdy+ n(x; y) We assume h(x; x ; y; y) is known (?) Assumption: 1. E [n(x; y)] = 0 2. E [f(x; y)f(x; y)] = R ff (x; y; x; y) E [n(x; y)n(x; y)] = R nn (x; y; x; y) known Problem: Given g(x; y) nd f(x; b y) so that 2 " 2 = E f(x; y) f(x; b y) is a minimum Solution: To get a meaningful solution we need to assume that b f(x; y) is a linear function of g(x; y). bf(x; y) = RR m(x; x ; y; y)g(x; y)dxdy We need to calculate m(x; x ; y; y) as a function of g and h We wish that RR 2 E bf(x; y) m(x; x ; y; y)g(x; y)dxdy be a minimum Using the orthogonality theorem we have h RR i E bf(x; y) m(x; x ; y; y)g(x; y)dxdy; g(ex; ey) = 0 all ex; ey Interchanging the order of the integrals h i E bf(x; y)g(ex; ey) = RR E m(x; x ; y; y)g(x; y)g(ex; ey)dxdy 2
31
32
33
34 Wiener Filter * H ( u, v) M ( u, v) 2 Snn( u, v) H( u, v) S ( u, v) H = Fourier transform of "blurring S nn = Fourier transform of R (noise) nn S = Fourier transform of R (power spectrum) ff ff R ff t R E ff f f i j R ij nn E ff E nn t t ת ff חלת R ff, R are real and symmetric nn
35 Wiener Filter * H ( u, v) M ( u, v) 2 Snn( u, v) H( u, v) S ( u, v) H = Fourier transform of "blurring S nn = Fourier transform of R (noise) nn S = Fourier transform of R (power spectrum) ff ff R ff t R E ff f f i j R ij nn E ff E nn t t ת ff חלת R ff, R are real and symmetric nn
36 Wiener Filter 2 minimize e E f f 2 F( u, v) H = degradation * H ( u, v) 2 Snn( u, v) H( u, v) S ( u, v) ff G( u, v) S N( u, v) 2 power spectrum of noise nn S F( u, v) 2 power spectrum of undegraded image ff Sometimes Fˆ( u, v) Inverse: * H ( u, v) H( u, v) G( u, v) Fˆ( u, v) H( u, v) G( u, v) 2 K
37
38
39
40
41

42
43 One Dimensional Motion Fourier transform G(m; n) = = = g(x; y) = Z 1 Z 1 1 Z T 0 Z T 1 Z 1 1 So the transfer function is 0 Z T 0 f(x x 0 (t); y y 0 (t))dt g(x; y)e 2i(mx+ny) dxdy Z 1 1 f(x x 0 ; y y 0 )e 2i(mx+ny) dxdy dt F (u; v)e 2i(mx0+ny0) dt H(m; n) = Z T 0 e 2i(mx0(t)+ny0(t)) dt Assume x 0 = t T y 0 = 0. Then H(m; n) = Z T 0 e 2im t T dt = T e im sin(m) m Note that H(m; n) = 0 whenever m is an integer. Using sum instead of integral we get i T = total number of pixels recorded by the same cell of the camera N = total number of pixels in a row of the image H(m; n) = 1 sin( nm N i T ) i T sin( nm N ) e i m N 1
44 Wiener Filter M(u; v) = H (u; v) jh(u; v)j 2 + Snn(u;v) S ff (u;v) Note: S ff (u; v) is autocorrelation of the original picture Assumption: Noise is white: S nn (u; v) = S nn (0; 0) = Z 1 Z 1 can be found when there is no image f(x; y) = R nn (x; y)dxdy Wierner-Khinchine Theorem The spatial autocorrelation function of a random eld f(x,y) is equal to the spectral density jf (u; v)j 2 example: blurred image H(m; n) = 1 sin( nm N i T ) i T sin( nm N ) e i m N jh(m; n)j 2 = 1 sin 2 ( nm N i T ) i 2 T sin 2 ( nm N ) 2
45

46
 E { ( f f ) } 2 85 Dr. Yoram Tal Deblurring with Wiener % I is flowers.")
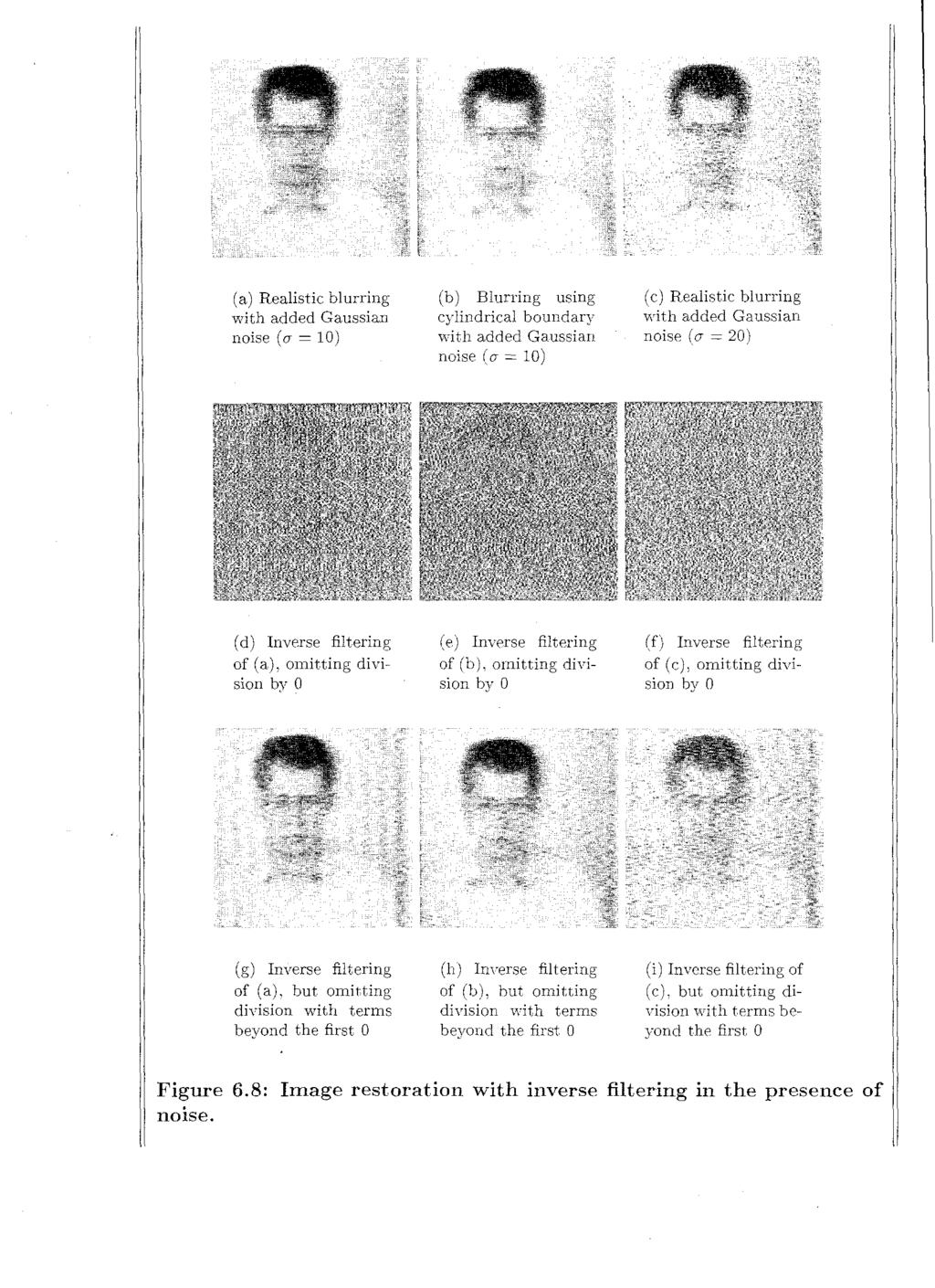
47 Dr. Yoram Tal Inverse filtering Problem: Given g and some information about H & n find f Solutions: Inverse filtering is bad: (too much noise) f f f + n = g = H H Better approach: Minimize some error functional such as: (the expectation value of the squared difference) E { ( f f ) } 2 85 Dr. Yoram Tal Deblurring with Wiener % I is flowers.tif (croped) LEN = 31; THETA = 11; PSF = fspecial('motion',len,theta); Blurred = imfilter(i,psf,'circular','conv'); wnr1 = deconvwnr(blurred,psf); Without noise, this is an inverse filter
; V =.")

48 Dr. Yoram Tal Additive Noise PSF = fspecial('gaussian',5,5); Blurred = imfilter(i,psf,'symmetric','conv'); V =.002; BlurredNoisy = imnoise(blurred,'gaussian',0,v); Source image Blurred & noised image 87 Dr. Yoram Tal Deblurring noisy images Lucy Richardson deconvolution Number of iterations luc1 = deconvlucy(blurrednoisy,psf,15); Source image deblurred image 88 44
49 Dr. Yoram Tal Methods deconvblind Restore image using blind deconvolution deconvlucy deconvreg deconvwnr Restore image using accelerated Richardson- Lucy algorithm. Restore image using Regularized filter Restore image using Wiener filter 83 Dr. Yoram Tal Deblurring Model Image degradation can be approximately described by this equation g = H f + n, where: g = H = f = n = The blurred image The distortion operator, also called the pointspread function (PSF). This function, when convolved with the image, creates the distortion The original undegraded image Additive noise, introduced during image acquisition, that corrupts the image
50 Constrained Matrix g = Hf + n n = g Hf Assume statistics of the noise are known, eg n T n = Let Lf be a functional of the picture e.g. discrete Laplacian. We wish to nd Use Lagrange multipliers (Lf) T (LF ) = minimum (g Hf) T (g Hf) = f = [H H + L L] = H g jhj 2 + L L Note instead of L = Laplacian take L L = Looks similar to Wiener L L = Snn S ff 1 H g Laplacian. 3

51
52
53

54


55

56
57

58

59
60

61
62
63
64 Lucy - Richardson Deconvolution Bt Bayes s theorem P (x y) = P (y x)p (x) P (y x)p (x)dx P (y x) is the conditional probability of y given x. Thus, P (x) is the object distribution f(x) P (y x) is the PSF cenetered at x i.e. g(x, y) P (y) is the degraded image or equivalentlu the convolution kernel c(y) So we construct an iterative method ( f i+1 (x) = or equivalently {[ f i+1 (x) = g(y, x)c(y)dy g(y, z)fi (z)dz c(x) f i (x) g(x) ) f i (x) ] } g( x) f i (x) In this case g(x) is known (non-blind convolution) and one iterates until f i (x) is known. For blind convolution we replace this by two steps 1, Given the object n Lucy-Richardson iterations are done to find the PSF g (k) (x) 2. The next f(x) is found by using n Lucy-Richardson iterations g k i+1 = f k i+1(x) = {[ c(x) gi k(x) f k 1 (x) {[ c(x) fi k(x) gk (x) ] } f k 1 ( x) gi k } ] g k ( x) f k i (x) 1
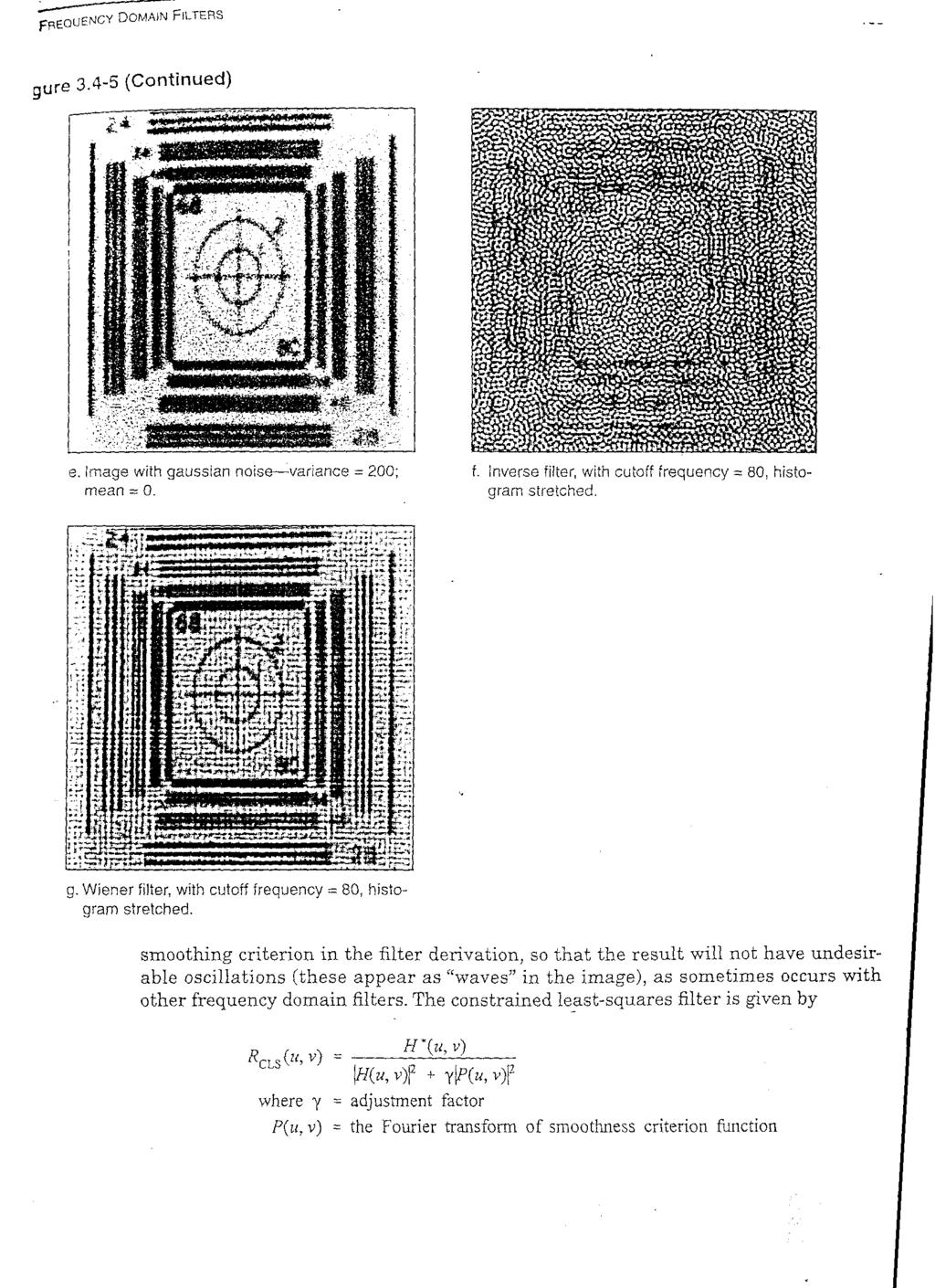
65 g = H* f + n Wiener Deconvolution minimum least square error estimation * H ( u, v) Guv (, ) = 2 Pn ( u, v) Huv (, ) + P ( u, v) f Problems: 1. MSE is not physically relevant Human eye more tolerant of errors in dark areas and high gradient areas 2. Cannot handle spatially variant blurring PSF 3. Cannot handle nonstationary signals and noise 4. Depends on Pf, Pn Which are not usually known Power Spectrum Equalization - Homomorphic filter Guv (, ) = 2 Pn ( u, v) Huv (, ) 1 + Pf ( u, v) 1 2 Geometric Mean Filter Guv (, ) If * α * H ( u, v) H ( u, v) = Huv (, ) 2 Pn ( u, v) Huv (, ) + γ Pf ( u, v) α = 0 Called the parametric Wiener filter 1 α Constrained Least Square Restoration 2 g Hf = n So consider Lagrange multiplier formulation 2 ( ) W fˆ Qfˆ g Hfˆ n 2 2 ( ) = + λ w Set = 0 Then fˆ = fˆ * Hg γ = H Q + γ λ Example: Q=Laplacian 2 2 (, ) = 4 π ( + ) Quv u v
66 g = H* f + n Wiener Deconvolution minimum least square error estimation fr = deconvwnr(g, PSF, NACORR, FACORR) NACORR, FACORR are the autocorrelation functions of the noise and the undegraded picture (in picture space as matrix or scalar). This is the inverse FFT of the power spectrum. Constrained Least Square Restoration fˆ = * Hg γ = H + γ Q λ Example: Q=Laplacian Quv u v 2 2 (, ) = 4 π ( + ) Fr=deconvreg(g, PSF, NOISEPOWER, RANGE) Lucy Richardson Restoration Fr=deconvlucy(g, PSF, NUMIT, DAMPAR, WEIGHT) Blind Deconcolution Fr=deconvblind(g, INITPSF, NUMIT, DAMPAR, WEIGHT)
67

68
Image Degradation Model (Linear/Additive)
") Image Degradation Model (Linear/Additive),,,,,,,, g x y h x y f x y x y G uv H uv F uv N uv 1 Source of noise Image acquisition (digitization) Image transmission Spatial properties of noise Statistical
Image Degradation Model (Linear/Additive),,,,,,,, g x y h x y f x y x y G uv H uv F uv N uv 1 Source of noise Image acquisition (digitization) Image transmission Spatial properties of noise Statistical
Optics for Engineers Chapter 11
 Optics for Engineers Chapter 11 Charles A. DiMarzio Northeastern University Nov. 212 Fourier Optics Terminology Field Plane Fourier Plane C Field Amplitude, E(x, y) Ẽ(f x, f y ) Amplitude Point Spread
Optics for Engineers Chapter 11 Charles A. DiMarzio Northeastern University Nov. 212 Fourier Optics Terminology Field Plane Fourier Plane C Field Amplitude, E(x, y) Ẽ(f x, f y ) Amplitude Point Spread
Optics for Engineers Chapter 11
 Optics for Engineers Chapter 11 Charles A. DiMarzio Northeastern University Apr. 214 Fourier Optics Terminology Apr. 214 c C. DiMarzio (Based on Optics for Engineers, CRC Press) slides11r1 1 Fourier Optics
Optics for Engineers Chapter 11 Charles A. DiMarzio Northeastern University Apr. 214 Fourier Optics Terminology Apr. 214 c C. DiMarzio (Based on Optics for Engineers, CRC Press) slides11r1 1 Fourier Optics
Wiener Deconvolution: Theoretical Basis
 Wiener Deconvolution: Theoretical Basis The Wiener Deconvolution is a technique use to obtain the phase-velocity ispersion curve an the attenuation coefficients, by a two-stations metho, from two pre-processe
Wiener Deconvolution: Theoretical Basis The Wiener Deconvolution is a technique use to obtain the phase-velocity ispersion curve an the attenuation coefficients, by a two-stations metho, from two pre-processe
Image Degradation Model (Linear/Additive)
") Image Degradation Model (Linear/Additive),,,,,,,, g x y f x y h x y x y G u v F u v H u v N u v 1 Source of noise Objects Impurities Image acquisition (digitization) Image transmission Spatial properties
Image Degradation Model (Linear/Additive),,,,,,,, g x y f x y h x y x y G u v F u v H u v N u v 1 Source of noise Objects Impurities Image acquisition (digitization) Image transmission Spatial properties
On the FPA infrared camera transfer function calculation
 On the FPA infrared camera transfer function calculation (1) CERTES, Université Paris XII Val de Marne, Créteil, France (2) LTM, Université de Bourgogne, Le Creusot, France by S. Datcu 1, L. Ibos 1,Y.
On the FPA infrared camera transfer function calculation (1) CERTES, Université Paris XII Val de Marne, Créteil, France (2) LTM, Université de Bourgogne, Le Creusot, France by S. Datcu 1, L. Ibos 1,Y.
Finite Apertures, Interfaces
 1 Finite Apertures, Interfaces & Point Spread Functions (PSF) & Convolution Tutorial by Jorge Márquez Flores 2 Figure 1. Visual acuity (focus) depends on aperture (iris), lenses, focal point location,
1 Finite Apertures, Interfaces & Point Spread Functions (PSF) & Convolution Tutorial by Jorge Márquez Flores 2 Figure 1. Visual acuity (focus) depends on aperture (iris), lenses, focal point location,
TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection
 Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
MATHEMATICAL MODEL OF IMAGE DEGRADATION. = s
 MATHEMATICAL MODEL OF IMAGE DEGRADATION H s u v G s u v F s u v ^ F u v G u v H s u v Gaussian Kernel Source: C. Rasmussen Gaussian filters pixel 5 pixels 0 pixels 30 pixels Gaussian filter Removes high-frequency
MATHEMATICAL MODEL OF IMAGE DEGRADATION H s u v G s u v F s u v ^ F u v G u v H s u v Gaussian Kernel Source: C. Rasmussen Gaussian filters pixel 5 pixels 0 pixels 30 pixels Gaussian filter Removes high-frequency
Computer Vision & Digital Image Processing
 Computer Vision & Digital Image Processing Image Restoration and Reconstruction I Dr. D. J. Jackson Lecture 11-1 Image restoration Restoration is an objective process that attempts to recover an image
Computer Vision & Digital Image Processing Image Restoration and Reconstruction I Dr. D. J. Jackson Lecture 11-1 Image restoration Restoration is an objective process that attempts to recover an image
Application of Image Restoration Technique in Flow Scalar Imaging Experiments Guanghua Wang
 Application of Image Restoration Technique in Flow Scalar Imaging Experiments Guanghua Wang Center for Aeromechanics Research Department of Aerospace Engineering and Engineering Mechanics The University
Application of Image Restoration Technique in Flow Scalar Imaging Experiments Guanghua Wang Center for Aeromechanics Research Department of Aerospace Engineering and Engineering Mechanics The University
Empirical Mean and Variance!
 Global Image Properties! Global image properties refer to an image as a whole rather than components. Computation of global image properties is often required for image enhancement, preceding image analysis.!
Global Image Properties! Global image properties refer to an image as a whole rather than components. Computation of global image properties is often required for image enhancement, preceding image analysis.!
Prof. Mohd Zaid Abdullah Room No:
 EEE 52/4 Advnced Digital Signal and Image Processing Tuesday, 00-300 hrs, Data Com. Lab. Friday, 0800-000 hrs, Data Com. Lab Prof. Mohd Zaid Abdullah Room No: 5 Email: mza@usm.my www.eng.usm.my Electromagnetic
EEE 52/4 Advnced Digital Signal and Image Processing Tuesday, 00-300 hrs, Data Com. Lab. Friday, 0800-000 hrs, Data Com. Lab Prof. Mohd Zaid Abdullah Room No: 5 Email: mza@usm.my www.eng.usm.my Electromagnetic
Wiener Filter for Deterministic Blur Model
 Wiener Filter for Deterministic Blur Model Based on Ch. 5 of Gonzalez & Woods, Digital Image Processing, nd Ed., Addison-Wesley, 00 One common application of the Wiener filter has been in the area of simultaneous
Wiener Filter for Deterministic Blur Model Based on Ch. 5 of Gonzalez & Woods, Digital Image Processing, nd Ed., Addison-Wesley, 00 One common application of the Wiener filter has been in the area of simultaneous
Machine Learning. A Bayesian and Optimization Perspective. Academic Press, Sergios Theodoridis 1. of Athens, Athens, Greece.
 Machine Learning A Bayesian and Optimization Perspective Academic Press, 2015 Sergios Theodoridis 1 1 Dept. of Informatics and Telecommunications, National and Kapodistrian University of Athens, Athens,
Machine Learning A Bayesian and Optimization Perspective Academic Press, 2015 Sergios Theodoridis 1 1 Dept. of Informatics and Telecommunications, National and Kapodistrian University of Athens, Athens,
1. Abstract. 2. Introduction/Problem Statement
 Advances in polarimetric deconvolution Capt. Kurtis G. Engelson Air Force Institute of Technology, Student Dr. Stephen C. Cain Air Force Institute of Technology, Professor 1. Abstract One of the realities
Advances in polarimetric deconvolution Capt. Kurtis G. Engelson Air Force Institute of Technology, Student Dr. Stephen C. Cain Air Force Institute of Technology, Professor 1. Abstract One of the realities
 UNIT III IMAGE RESTORATION Part A Questions 1. What is meant by Image Restoration? Restoration attempts to reconstruct or recover an image that has been degraded by using a clear knowledge of the degrading
UNIT III IMAGE RESTORATION Part A Questions 1. What is meant by Image Restoration? Restoration attempts to reconstruct or recover an image that has been degraded by using a clear knowledge of the degrading
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 11 Oct 3 rd, 2017 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review: 2D Discrete Fourier Transform If I is an image of size N then Sin
Digital Image Processing COSC 6380/4393 Lecture 11 Oct 3 rd, 2017 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review: 2D Discrete Fourier Transform If I is an image of size N then Sin
PH880 Topics in Physics
 PH880 Topics in Physics Modern Optical Imaging (Fall 2010) Monday Fourier Optics Overview of week 3 Transmission function, Diffraction 4f telescopic system PSF, OTF Wednesday Conjugate Plane Bih Bright
PH880 Topics in Physics Modern Optical Imaging (Fall 2010) Monday Fourier Optics Overview of week 3 Transmission function, Diffraction 4f telescopic system PSF, OTF Wednesday Conjugate Plane Bih Bright
EE Camera & Image Formation
 Electric Electronic Engineering Bogazici University February 21, 2018 Introduction Introduction Camera models Goal: To understand the image acquisition process. Function of the camera Similar to that of
Electric Electronic Engineering Bogazici University February 21, 2018 Introduction Introduction Camera models Goal: To understand the image acquisition process. Function of the camera Similar to that of
Digital Image Processing
 Digital Image Processing Part 3: Fourier Transform and Filtering in the Frequency Domain AASS Learning Systems Lab, Dep. Teknik Room T109 (Fr, 11-1 o'clock) achim.lilienthal@oru.se Course Book Chapter
Digital Image Processing Part 3: Fourier Transform and Filtering in the Frequency Domain AASS Learning Systems Lab, Dep. Teknik Room T109 (Fr, 11-1 o'clock) achim.lilienthal@oru.se Course Book Chapter
Computer Vision. Filtering in the Frequency Domain
 Computer Vision Filtering in the Frequency Domain Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 Introduction
Computer Vision Filtering in the Frequency Domain Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 Introduction
Blind Image Deconvolution Using The Sylvester Matrix
 Blind Image Deconvolution Using The Sylvester Matrix by Nora Abdulla Alkhaldi A thesis submitted to the Department of Computer Science in conformity with the requirements for the degree of PhD Sheffield
Blind Image Deconvolution Using The Sylvester Matrix by Nora Abdulla Alkhaldi A thesis submitted to the Department of Computer Science in conformity with the requirements for the degree of PhD Sheffield
High-Resolution. Transmission. Electron Microscopy
 Part 4 High-Resolution Transmission Electron Microscopy 186 Significance high-resolution transmission electron microscopy (HRTEM): resolve object details smaller than 1nm (10 9 m) image the interior of
Part 4 High-Resolution Transmission Electron Microscopy 186 Significance high-resolution transmission electron microscopy (HRTEM): resolve object details smaller than 1nm (10 9 m) image the interior of
Today. MIT 2.71/2.710 Optics 11/10/04 wk10-b-1
 Today Review of spatial filtering with coherent illumination Derivation of the lens law using wave optics Point-spread function of a system with incoherent illumination The Modulation Transfer Function
Today Review of spatial filtering with coherent illumination Derivation of the lens law using wave optics Point-spread function of a system with incoherent illumination The Modulation Transfer Function
Fourier Transforms 1D
 Fourier Transforms 1D 3D Image Processing Alireza Ghane 1 Overview Recap Intuitions Function representations shift-invariant spaces linear, time-invariant (LTI) systems complex numbers Fourier Transforms
Fourier Transforms 1D 3D Image Processing Alireza Ghane 1 Overview Recap Intuitions Function representations shift-invariant spaces linear, time-invariant (LTI) systems complex numbers Fourier Transforms
A Method for Blur and Similarity Transform Invariant Object Recognition
 A Method for Blur and Similarity Transform Invariant Object Recognition Ville Ojansivu and Janne Heikkilä Machine Vision Group, Department of Electrical and Information Engineering, University of Oulu,
A Method for Blur and Similarity Transform Invariant Object Recognition Ville Ojansivu and Janne Heikkilä Machine Vision Group, Department of Electrical and Information Engineering, University of Oulu,
EE 367 / CS 448I Computational Imaging and Display Notes: Image Deconvolution (lecture 6)
") EE 367 / CS 448I Computational Imaging and Display Notes: Image Deconvolution (lecture 6) Gordon Wetzstein gordon.wetzstein@stanford.edu This document serves as a supplement to the material discussed in
EE 367 / CS 448I Computational Imaging and Display Notes: Image Deconvolution (lecture 6) Gordon Wetzstein gordon.wetzstein@stanford.edu This document serves as a supplement to the material discussed in
Edge Detection in Computer Vision Systems
 1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
Spatial-Domain Convolution Filters
 Spatial-Domain Filtering 9 Spatial-Domain Convolution Filters Consider a linear space-invariant (LSI) system as shown: The two separate inputs to the LSI system, x 1 (m) and x 2 (m), and their corresponding
Spatial-Domain Filtering 9 Spatial-Domain Convolution Filters Consider a linear space-invariant (LSI) system as shown: The two separate inputs to the LSI system, x 1 (m) and x 2 (m), and their corresponding
Index. p, lip, 78 8 function, 107 v, 7-8 w, 7-8 i,7-8 sine, 43 Bo,94-96
 p, lip, 78 8 function, 107 v, 7-8 w, 7-8 i,7-8 sine, 43 Bo,94-96 B 1,94-96 M,94-96 B oro!' 94-96 BIro!' 94-96 I/r, 79 2D linear system, 56 2D FFT, 119 2D Fourier transform, 1, 12, 18,91 2D sinc, 107, 112
p, lip, 78 8 function, 107 v, 7-8 w, 7-8 i,7-8 sine, 43 Bo,94-96 B 1,94-96 M,94-96 B oro!' 94-96 BIro!' 94-96 I/r, 79 2D linear system, 56 2D FFT, 119 2D Fourier transform, 1, 12, 18,91 2D sinc, 107, 112
Multimedia communications
 Multimedia communications Comunicazione multimediale G. Menegaz gloria.menegaz@univr.it Prologue Context Context Scale Scale Scale Course overview Goal The course is about wavelets and multiresolution
Multimedia communications Comunicazione multimediale G. Menegaz gloria.menegaz@univr.it Prologue Context Context Scale Scale Scale Course overview Goal The course is about wavelets and multiresolution
Linear Operators and Fourier Transform
 Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
Musimathics The Mathematical Foundations of Music Volume 2. Gareth Loy. Foreword by John Chowning
 Musimathics The Mathematical Foundations of Music Volume 2 Gareth Loy Foreword by John Chowning The MIT Press Cambridge, Massachusetts London, England ..2.3.4.5.6.7.8.9.0..2.3.4 2 2. 2.2 2.3 2.4 2.5 2.6
Musimathics The Mathematical Foundations of Music Volume 2 Gareth Loy Foreword by John Chowning The MIT Press Cambridge, Massachusetts London, England ..2.3.4.5.6.7.8.9.0..2.3.4 2 2. 2.2 2.3 2.4 2.5 2.6
Lecture 04 Image Filtering
 Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Lecture 14: Convolution and Frequency Domain Filtering
 Lecture 4: Convolution and Frequency Domain Filtering Harvey Rhody Chester F. Carlson Center for Imaging Science Rochester Institute of Technology rhody@cis.rit.edu October 7, 005 Abstract The impulse
Lecture 4: Convolution and Frequency Domain Filtering Harvey Rhody Chester F. Carlson Center for Imaging Science Rochester Institute of Technology rhody@cis.rit.edu October 7, 005 Abstract The impulse
Mathematical Beer Goggles or The Mathematics of Image Processing
 How Mathematical Beer Goggles or The Mathematics of Image Processing Department of Mathematical Sciences University of Bath Postgraduate Seminar Series University of Bath 12th February 2008 1 How 2 How
How Mathematical Beer Goggles or The Mathematics of Image Processing Department of Mathematical Sciences University of Bath Postgraduate Seminar Series University of Bath 12th February 2008 1 How 2 How
Image Filtering. Slides, adapted from. Steve Seitz and Rick Szeliski, U.Washington
 Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
Aperture Photometry in Band Limited. Data. Robert Lupton. March 4, Band limited data, that is, data that has non-zero Fourier components in
 Aperture Photometry in Band Limited Data Robert Lupton March 4, 996 Band Limited Data Band limited data, that is, data that has non-zero Fourier components in only a restricted part of k-space jkj < k,
Aperture Photometry in Band Limited Data Robert Lupton March 4, 996 Band Limited Data Band limited data, that is, data that has non-zero Fourier components in only a restricted part of k-space jkj < k,
What is Image Deblurring?
 What is Image Deblurring? When we use a camera, we want the recorded image to be a faithful representation of the scene that we see but every image is more or less blurry, depending on the circumstances.
What is Image Deblurring? When we use a camera, we want the recorded image to be a faithful representation of the scene that we see but every image is more or less blurry, depending on the circumstances.
Midterm Summary Fall 08. Yao Wang Polytechnic University, Brooklyn, NY 11201
 Midterm Summary Fall 8 Yao Wang Polytechnic University, Brooklyn, NY 2 Components in Digital Image Processing Output are images Input Image Color Color image image processing Image Image restoration Image
Midterm Summary Fall 8 Yao Wang Polytechnic University, Brooklyn, NY 2 Components in Digital Image Processing Output are images Input Image Color Color image image processing Image Image restoration Image
7. Telescopes: Portals of Discovery Pearson Education Inc., publishing as Addison Wesley
 7. Telescopes: Portals of Discovery Parts of the Human Eye pupil allows light to enter the eye lens focuses light to create an image retina detects the light and generates signals which are sent to the
7. Telescopes: Portals of Discovery Parts of the Human Eye pupil allows light to enter the eye lens focuses light to create an image retina detects the light and generates signals which are sent to the
ITK Filters. Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms
 ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
Lecture 9: Speckle Interferometry. Full-Aperture Interferometry. Labeyrie Technique. Knox-Thompson Technique. Bispectrum Technique
 Lecture 9: Speckle Interferometry Outline 1 Full-Aperture Interferometry 2 Labeyrie Technique 3 Knox-Thompson Technique 4 Bispectrum Technique 5 Differential Speckle Imaging 6 Phase-Diverse Speckle Imaging
Lecture 9: Speckle Interferometry Outline 1 Full-Aperture Interferometry 2 Labeyrie Technique 3 Knox-Thompson Technique 4 Bispectrum Technique 5 Differential Speckle Imaging 6 Phase-Diverse Speckle Imaging
Phys 531 Lecture 27 6 December 2005
 Phys 531 Lecture 27 6 December 2005 Final Review Last time: introduction to quantum field theory Like QM, but field is quantum variable rather than x, p for particle Understand photons, noise, weird quantum
Phys 531 Lecture 27 6 December 2005 Final Review Last time: introduction to quantum field theory Like QM, but field is quantum variable rather than x, p for particle Understand photons, noise, weird quantum
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Designing a Space Telescope to Image Earth-like Planets
 Designing a Space Telescope to Image Earth-like Planets Robert J. Vanderbei Rutgers University December 4, 2002 Page 1 of 28 Member: Princeton University/Ball Aerospace TPF Team http://www.princeton.edu/
Designing a Space Telescope to Image Earth-like Planets Robert J. Vanderbei Rutgers University December 4, 2002 Page 1 of 28 Member: Princeton University/Ball Aerospace TPF Team http://www.princeton.edu/
Image enhancement. Why image enhancement? Why image enhancement? Why image enhancement? Example of artifacts caused by image encoding
 13 Why image enhancement? Image enhancement Example of artifacts caused by image encoding Computer Vision, Lecture 14 Michael Felsberg Computer Vision Laboratory Department of Electrical Engineering 12
13 Why image enhancement? Image enhancement Example of artifacts caused by image encoding Computer Vision, Lecture 14 Michael Felsberg Computer Vision Laboratory Department of Electrical Engineering 12
ENERGY METHODS IN IMAGE PROCESSING WITH EDGE ENHANCEMENT
 ENERGY METHODS IN IMAGE PROCESSING WITH EDGE ENHANCEMENT PRASHANT ATHAVALE Abstract. Digital images are can be realized as L 2 (R 2 objects. Noise is introduced in a digital image due to various reasons.
ENERGY METHODS IN IMAGE PROCESSING WITH EDGE ENHANCEMENT PRASHANT ATHAVALE Abstract. Digital images are can be realized as L 2 (R 2 objects. Noise is introduced in a digital image due to various reasons.
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 7 Spectral Image Processing and Convolution Winter Semester 2014/15 Slides: Prof. Bernd
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 7 Spectral Image Processing and Convolution Winter Semester 2014/15 Slides: Prof. Bernd
An IDL Based Image Deconvolution Software Package
 An IDL Based Image Deconvolution Software Package F. Városi and W. B. Landsman Hughes STX Co., Code 685, NASA/GSFC, Greenbelt, MD 20771 Abstract. Using the Interactive Data Language (IDL), we have implemented
An IDL Based Image Deconvolution Software Package F. Városi and W. B. Landsman Hughes STX Co., Code 685, NASA/GSFC, Greenbelt, MD 20771 Abstract. Using the Interactive Data Language (IDL), we have implemented
Chapter 6 Telescopes: Portals of Discovery
 Chapter 6 Telescopes: Portals of Discovery 6.1 Eyes and Cameras: Everyday Light Sensors Our goals for learning: How does your eye form an image? How do we record images? How does your eye form an image?
Chapter 6 Telescopes: Portals of Discovery 6.1 Eyes and Cameras: Everyday Light Sensors Our goals for learning: How does your eye form an image? How do we record images? How does your eye form an image?
IMAGE ENHANCEMENT II (CONVOLUTION)
") MOTIVATION Recorded images often exhibit problems such as: blurry noisy Image enhancement aims to improve visual quality Cosmetic processing Usually empirical techniques, with ad hoc parameters ( whatever
MOTIVATION Recorded images often exhibit problems such as: blurry noisy Image enhancement aims to improve visual quality Cosmetic processing Usually empirical techniques, with ad hoc parameters ( whatever
Interference, Diffraction and Fourier Theory. ATI 2014 Lecture 02! Keller and Kenworthy
 Interference, Diffraction and Fourier Theory ATI 2014 Lecture 02! Keller and Kenworthy The three major branches of optics Geometrical Optics Light travels as straight rays Physical Optics Light can be
Interference, Diffraction and Fourier Theory ATI 2014 Lecture 02! Keller and Kenworthy The three major branches of optics Geometrical Optics Light travels as straight rays Physical Optics Light can be
Convolution and Linear Systems
 CS 450: Introduction to Digital Signal and Image Processing Bryan Morse BYU Computer Science Introduction Analyzing Systems Goal: analyze a device that turns one signal into another. Notation: f (t) g(t)
CS 450: Introduction to Digital Signal and Image Processing Bryan Morse BYU Computer Science Introduction Analyzing Systems Goal: analyze a device that turns one signal into another. Notation: f (t) g(t)
Intensity Transformations and Spatial Filtering: WHICH ONE LOOKS BETTER? Intensity Transformations and Spatial Filtering: WHICH ONE LOOKS BETTER?
 : WHICH ONE LOOKS BETTER? 3.1 : WHICH ONE LOOKS BETTER? 3.2 1 Goal: Image enhancement seeks to improve the visual appearance of an image, or convert it to a form suited for analysis by a human or a machine.
: WHICH ONE LOOKS BETTER? 3.1 : WHICH ONE LOOKS BETTER? 3.2 1 Goal: Image enhancement seeks to improve the visual appearance of an image, or convert it to a form suited for analysis by a human or a machine.
Numerical Methods in TEM Convolution and Deconvolution
 Numerical Methods in TEM Convolution and Deconvolution Christoph T. Koch Max Planck Institut für Metallforschung http://hrem.mpi-stuttgart.mpg.de/koch/vorlesung Applications of Convolution in TEM Smoothing
Numerical Methods in TEM Convolution and Deconvolution Christoph T. Koch Max Planck Institut für Metallforschung http://hrem.mpi-stuttgart.mpg.de/koch/vorlesung Applications of Convolution in TEM Smoothing
Revision of Lecture 4
 Revision of Lecture 4 We have discussed all basic components of MODEM Pulse shaping Tx/Rx filter pair Modulator/demodulator Bits map symbols Discussions assume ideal channel, and for dispersive channel
Revision of Lecture 4 We have discussed all basic components of MODEM Pulse shaping Tx/Rx filter pair Modulator/demodulator Bits map symbols Discussions assume ideal channel, and for dispersive channel
VID3: Sampling and Quantization
 Video Transmission VID3: Sampling and Quantization By Prof. Gregory D. Durgin copyright 2009 all rights reserved Claude E. Shannon (1916-2001) Mathematician and Electrical Engineer Worked for Bell Labs
Video Transmission VID3: Sampling and Quantization By Prof. Gregory D. Durgin copyright 2009 all rights reserved Claude E. Shannon (1916-2001) Mathematician and Electrical Engineer Worked for Bell Labs
Image Alignment and Mosaicing
 Image Alignment and Mosaicing Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic mosaicing Image Enhancement Original
Image Alignment and Mosaicing Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic mosaicing Image Enhancement Original
Introduction to Computer Vision. 2D Linear Systems
 Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Blind image restoration as a convex optimization problem
 Int. J. Simul. Multidisci.Des. Optim. 4, 33-38 (2010) c ASMDO 2010 DOI: 10.1051/ijsmdo/ 2010005 Available online at: http://www.ijsmdo.org Blind image restoration as a convex optimization problem A. Bouhamidi
Int. J. Simul. Multidisci.Des. Optim. 4, 33-38 (2010) c ASMDO 2010 DOI: 10.1051/ijsmdo/ 2010005 Available online at: http://www.ijsmdo.org Blind image restoration as a convex optimization problem A. Bouhamidi
Spatial Frequency and Transfer Function. columns of atoms, where the electrostatic potential is higher than in vacuum
 Image Formation Spatial Frequency and Transfer Function consider thin TEM specimen columns of atoms, where the electrostatic potential is higher than in vacuum electrons accelerate when entering the specimen
Image Formation Spatial Frequency and Transfer Function consider thin TEM specimen columns of atoms, where the electrostatic potential is higher than in vacuum electrons accelerate when entering the specimen
The science of light. P. Ewart
 The science of light P. Ewart Lecture notes: On web site NB outline notes! Textbooks: Hecht, Klein and Furtak, Lipson, Lipson and Lipson, Optical Physics Brooker, Modern Classical Problems: Material for
The science of light P. Ewart Lecture notes: On web site NB outline notes! Textbooks: Hecht, Klein and Furtak, Lipson, Lipson and Lipson, Optical Physics Brooker, Modern Classical Problems: Material for
Lecture Topics VMF Prof. Dr.-Ing. habil. Hermann Lödding Prof. Dr.-Ing. Wolfgang Hintze. PD Dr.-Ing. habil.
 Lecture Topics. Introduction. Sensor Guides Robots / Machines 3. Motivation Model Calibration 4. 3D Video Metric (Geometrical Camera Model) 5. Grey Level Picture Processing for Position Measurement 6.
Lecture Topics. Introduction. Sensor Guides Robots / Machines 3. Motivation Model Calibration 4. 3D Video Metric (Geometrical Camera Model) 5. Grey Level Picture Processing for Position Measurement 6.
Lock-in Thermography on Electronic Devices Using Spatial Deconvolution
 Lock-in Thermography on Electronic Devices Using Spatial Deconvolution by M. Hejjo Al Rifai, O. Breitenstein and J.P. Rakotoniaina Max Planck Institute of Microstructure Physics, Halle, Germany Abstract
Lock-in Thermography on Electronic Devices Using Spatial Deconvolution by M. Hejjo Al Rifai, O. Breitenstein and J.P. Rakotoniaina Max Planck Institute of Microstructure Physics, Halle, Germany Abstract
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University. Computer Vision: 4. Filtering
 I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 4. Filtering Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 4. Filtering Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth
Signal Processing COS 323
 Signal Processing COS 323 Digital Signals D: functions of space or time e.g., sound 2D: often functions of 2 spatial dimensions e.g. images 3D: functions of 3 spatial dimensions CAT, MRI scans or 2 space,
Signal Processing COS 323 Digital Signals D: functions of space or time e.g., sound 2D: often functions of 2 spatial dimensions e.g. images 3D: functions of 3 spatial dimensions CAT, MRI scans or 2 space,
Supplementary Figure 1: Example non-overlapping, binary probe functions P1 (~q) and P2 (~q), that add to form a top hat function A(~q).
 and P2 (~q), that add to form a top hat function A(~q).") Supplementary Figures P(q) A(q) + Function Value P(q) qmax = Supplementary Figure : Example non-overlapping, binary probe functions P (~q) and P (~q), that add to form a top hat function A(~q). qprobe
Supplementary Figures P(q) A(q) + Function Value P(q) qmax = Supplementary Figure : Example non-overlapping, binary probe functions P (~q) and P (~q), that add to form a top hat function A(~q). qprobe
Lens Design II. Lecture 1: Aberrations and optimization Herbert Gross. Winter term
 Lens Design II Lecture 1: Aberrations and optimization 18-1-17 Herbert Gross Winter term 18 www.iap.uni-jena.de Preliminary Schedule Lens Design II 18 1 17.1. Aberrations and optimization Repetition 4.1.
Lens Design II Lecture 1: Aberrations and optimization 18-1-17 Herbert Gross Winter term 18 www.iap.uni-jena.de Preliminary Schedule Lens Design II 18 1 17.1. Aberrations and optimization Repetition 4.1.
6 The SVD Applied to Signal and Image Deblurring
 6 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
6 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
2-D Images in Astronomy
 2-D Images in Astronomy ZTF camera FOV is 50 square degrees. Largest camera on >1m telescope by area in the world. Or, to make a little clearer, here s Orion. The white box is the ZTF imaging area. The
2-D Images in Astronomy ZTF camera FOV is 50 square degrees. Largest camera on >1m telescope by area in the world. Or, to make a little clearer, here s Orion. The white box is the ZTF imaging area. The
! # %& () +,,. + / 0 & ( , 3, %0203) , 3, &45 & ( /, 0203 & ( 4 ( 9
 +,,. + / 0 & ( , 3, %0203) , 3, &45 & ( /, 0203 & ( 4 ( 9") ! # %& () +,,. + / 0 & ( 0111 0 2 0+, 3, %0203) 0111 0 2 0+, 3, &45 & ( 6 7 2. 2 0111 48 5488 /, 0203 & ( 4 ( 9 : BLIND IMAGE DECONVOLUTION USING THE SYLVESTER RESULTANT MATRIX Nora Alkhaldi and Joab Winkler
! # %& () +,,. + / 0 & ( 0111 0 2 0+, 3, %0203) 0111 0 2 0+, 3, &45 & ( 6 7 2. 2 0111 48 5488 /, 0203 & ( 4 ( 9 : BLIND IMAGE DECONVOLUTION USING THE SYLVESTER RESULTANT MATRIX Nora Alkhaldi and Joab Winkler
5. LIGHT MICROSCOPY Abbe s theory of imaging
 5. LIGHT MICROSCOPY. We use Fourier optics to describe coherent image formation, imaging obtained by illuminating the specimen with spatially coherent light. We define resolution, contrast, and phase-sensitive
5. LIGHT MICROSCOPY. We use Fourier optics to describe coherent image formation, imaging obtained by illuminating the specimen with spatially coherent light. We define resolution, contrast, and phase-sensitive
Light Propagation in Free Space
 Intro Light Propagation in Free Space Helmholtz Equation 1-D Propagation Plane waves Plane wave propagation Light Propagation in Free Space 3-D Propagation Spherical Waves Huygen s Principle Each point
Intro Light Propagation in Free Space Helmholtz Equation 1-D Propagation Plane waves Plane wave propagation Light Propagation in Free Space 3-D Propagation Spherical Waves Huygen s Principle Each point
Science Insights: An International Journal
 Available online at http://www.urpjournals.com Science Insights: An International Journal Universal Research Publications. All rights reserved ISSN 2277 3835 Original Article Object Recognition using Zernike
Available online at http://www.urpjournals.com Science Insights: An International Journal Universal Research Publications. All rights reserved ISSN 2277 3835 Original Article Object Recognition using Zernike
8 The SVD Applied to Signal and Image Deblurring
 8 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
8 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
GBS765 Electron microscopy
 GBS765 Electron microscopy Lecture 1 Waves and Fourier transforms 10/14/14 9:05 AM Some fundamental concepts: Periodicity! If there is some a, for a function f(x), such that f(x) = f(x + na) then function
GBS765 Electron microscopy Lecture 1 Waves and Fourier transforms 10/14/14 9:05 AM Some fundamental concepts: Periodicity! If there is some a, for a function f(x), such that f(x) = f(x + na) then function
Chapter 6 Telescopes: Portals of Discovery. Agenda. How does your eye form an image? Refraction. Example: Refraction at Sunset
 Chapter 6 Telescopes: Portals of Discovery Agenda Announce: Read S2 for Thursday Ch. 6 Telescopes 6.1 Eyes and Cameras: Everyday Light Sensors How does your eye form an image? Our goals for learning How
Chapter 6 Telescopes: Portals of Discovery Agenda Announce: Read S2 for Thursday Ch. 6 Telescopes 6.1 Eyes and Cameras: Everyday Light Sensors How does your eye form an image? Our goals for learning How
8 The SVD Applied to Signal and Image Deblurring
 8 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
8 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
Super-Resolution. Dr. Yossi Rubner. Many slides from Miki Elad - Technion
 Super-Resolution Dr. Yossi Rubner yossi@rubner.co.il Many slides from Mii Elad - Technion 5/5/2007 53 images, ratio :4 Example - Video 40 images ratio :4 Example Surveillance Example Enhance Mosaics Super-Resolution
Super-Resolution Dr. Yossi Rubner yossi@rubner.co.il Many slides from Mii Elad - Technion 5/5/2007 53 images, ratio :4 Example - Video 40 images ratio :4 Example Surveillance Example Enhance Mosaics Super-Resolution
Discrete Fourier Transform
 Discrete Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013 Mårten Björkman
Discrete Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013 Mårten Björkman
Image Filtering, Edges and Image Representation
 Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
Chapter 6 Lecture. The Cosmic Perspective Seventh Edition. Telescopes Portals of Discovery Pearson Education, Inc.
 Chapter 6 Lecture The Cosmic Perspective Seventh Edition Telescopes Portals of Discovery Telescopes Portals of Discovery 6.1 Eyes and Cameras: Everyday Light Sensors Our goals for learning: How do eyes
Chapter 6 Lecture The Cosmic Perspective Seventh Edition Telescopes Portals of Discovery Telescopes Portals of Discovery 6.1 Eyes and Cameras: Everyday Light Sensors Our goals for learning: How do eyes
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Introduction to Interferometer and Coronagraph Imaging
 Introduction to Interferometer and Coronagraph Imaging Wesley A. Traub NASA Jet Propulsion Laboratory and Harvard-Smithsonian Center for Astrophysics Michelson Summer School on Astrometry Caltech, Pasadena
Introduction to Interferometer and Coronagraph Imaging Wesley A. Traub NASA Jet Propulsion Laboratory and Harvard-Smithsonian Center for Astrophysics Michelson Summer School on Astrometry Caltech, Pasadena
COMP344 Digital Image Processing Fall 2007 Final Examination
 COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
Math 121A: Homework 6 solutions
 Math A: Homework 6 solutions. (a) The coefficients of the Fourier sine series are given by b n = π f (x) sin nx dx = x(π x) sin nx dx π = (π x) cos nx dx nπ nπ [x(π x) cos nx]π = n ( )(sin nx) dx + π n
Math A: Homework 6 solutions. (a) The coefficients of the Fourier sine series are given by b n = π f (x) sin nx dx = x(π x) sin nx dx π = (π x) cos nx dx nπ nπ [x(π x) cos nx]π = n ( )(sin nx) dx + π n
Refraction is the bending of light when it passes from one substance into another. Your eye uses refraction to focus light.
 Telescopes Portals of Discovery Chapter 6 Lecture The Cosmic Perspective 6.1 Eyes and Cameras: Everyday Light Sensors How do eyes and cameras work? Seventh Edition Telescopes Portals of Discovery The Eye
Telescopes Portals of Discovery Chapter 6 Lecture The Cosmic Perspective 6.1 Eyes and Cameras: Everyday Light Sensors How do eyes and cameras work? Seventh Edition Telescopes Portals of Discovery The Eye
1 FUNCTIONS _ 5 _ 1.0 RELATIONS
 1 FUNCTIONS 1.0 RELATIONS Notes : (i) Four types of relations : one-to-one many-to-one one-to-many many-to-many. (ii) Three ways to represent relations : arrowed diagram set of ordered pairs graph. (iii)
1 FUNCTIONS 1.0 RELATIONS Notes : (i) Four types of relations : one-to-one many-to-one one-to-many many-to-many. (ii) Three ways to represent relations : arrowed diagram set of ordered pairs graph. (iii)
Telescopes (Chapter 6)
") Telescopes (Chapter 6) Based on Chapter 6 This material will be useful for understanding Chapters 7 and 10 on Our planetary system and Jovian planet systems Chapter 5 on Light will be useful for understanding
Telescopes (Chapter 6) Based on Chapter 6 This material will be useful for understanding Chapters 7 and 10 on Our planetary system and Jovian planet systems Chapter 5 on Light will be useful for understanding
Edge Detection. Image Processing - Computer Vision
 Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Fourier Series. (Com S 477/577 Notes) Yan-Bin Jia. Nov 29, 2016
 Yan-Bin Jia. Nov 29, 2016") Fourier Series (Com S 477/577 otes) Yan-Bin Jia ov 9, 016 1 Introduction Many functions in nature are periodic, that is, f(x+τ) = f(x), for some fixed τ, which is called the period of f. Though function
Fourier Series (Com S 477/577 otes) Yan-Bin Jia ov 9, 016 1 Introduction Many functions in nature are periodic, that is, f(x+τ) = f(x), for some fixed τ, which is called the period of f. Though function
Lecture Topics GVMS Prof. Dr.-Ing. habil. Hermann Lödding Prof. Dr.-Ing. Wolfgang Hintze. PD Dr.-Ing. habil.
 Lecture Topics 1. Introduction 2. Sensor Guides Robots / Machines 3. Motivation Model Calibration 4. 3D Video Metric (Geometrical Camera Model) 5. Grey Level Picture Processing for Position Measurement
Lecture Topics 1. Introduction 2. Sensor Guides Robots / Machines 3. Motivation Model Calibration 4. 3D Video Metric (Geometrical Camera Model) 5. Grey Level Picture Processing for Position Measurement
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture notes 5: Diffraction
 Lecture notes 5: Diffraction Let us now consider how light reacts to being confined to a given aperture. The resolution of an aperture is restricted due to the wave nature of light: as light passes through
Lecture notes 5: Diffraction Let us now consider how light reacts to being confined to a given aperture. The resolution of an aperture is restricted due to the wave nature of light: as light passes through
Deconvolution. Parameter Estimation in Linear Inverse Problems
 Image Parameter Estimation in Linear Inverse Problems Chair for Computer Aided Medical Procedures & Augmented Reality Department of Computer Science, TUM November 10, 2006 Contents A naive approach......with
Image Parameter Estimation in Linear Inverse Problems Chair for Computer Aided Medical Procedures & Augmented Reality Department of Computer Science, TUM November 10, 2006 Contents A naive approach......with
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background