Image Processing 1 (IP1) Bildverarbeitung 1
|
|
|
- Gabriel Conley
- 5 years ago
- Views:
Transcription
1 MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 7 Spectral Image Processing and Convolution Winter Semester 2014/15 Slides: Prof. Bernd Neumann Slightly revised by: Dr. Benjamin Seppke & Prof. Siegfried Stiehl

2 Spectral Image Properties An image function may be considered a sum of spatially sinusoidal components of different frequencies. The frequency spectrum indicates the magnitudes of the spatial frequencies contained in an image. f y = v Principle: y x f x = u Important qualitative properties of spectral information: spectral information is independent of image locations sharp edges give rise to high frequencies noise (= disturbances of image signal) is often high-frequency University of Hamburg, Dept. Informatics 2
3 Illustration of 1-D Fourier Series Expansion original waveform approximation of a rectangular pulse with sinusoidal components sinusoidal components add up to original waveform University of Hamburg, Dept. Informatics 3
4 Discrete Fourier Transform (DFT) Computes image representationas a sum of sinusoidals. Discrete Fourier Transform: G uv = 1 MN M 1 N 1 g mn e m=0 n=0 mu 2π j( M +nv N ) for u = 0,, M 1 and v = 0,, N 1 Notation for computing the Fourier Transform: G uv = F g mn g mn = F 1 { } { G uv } Transform is based on periodicity assumption! à periodic continuation may cause boundaryeffects Inverse Discrete Fourier-Transform: M 1 N 1 g mn = G uv e u=0 v=0 mu 2π j( M +nv N ) for m = 0,, M 1 and n = 0,, N University of Hamburg, Dept. Informatics 4
 In general, the Fourier transform is a complex function with a real (even)")

5 Basic Properties of DFT Linearity: F{ a g 1mn + b g 2mn } = a F{ g 1mn } + b F{ g 2mn } Symmetry: G -u,-v = G uv for real g mn (such as images) In general, the Fourier transform is a complex function with a real (even) and an imaginary (odd) part: G uv = R uv + i I uv Euler s formula: r e iz = r cos(z) + r i sin(z) University of Hamburg, Dept. Informatics Recommended reading: Gonzalez/Wintz Digital Image Processing Addison Wesley 87 5
6 Measures of DFT Freuqency/amplitude spectrum G(u,v) = Re{ G(u,v) } 2 + Im{ G(u,v) } 2 Power spectrum G(u,v) 2 Phase spectrum Frequency " Φ = arctan Im(u,v) % $ ' # Re(u,v) & f =1/ p mit p = u 2 + v 2 Direction " Ψ = arctan$ v % # u & ' University of Hamburg, Dept. Informatics 6




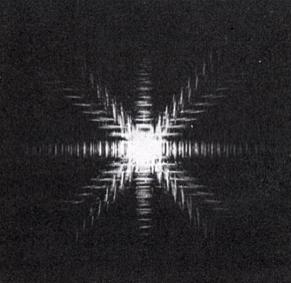
7 A g(x, y) Illustrative Example of Fourier Transform x X 2D image function Y y Frequency spectrum Note that large spectral amplitudes occur in directions vertical to prominent edges of the image function! frequency spectrum as an intensity function University of Hamburg, Dept. Informatics 7





8 Examples of Fourier Transform Pairs University of Hamburg, Dept. Informatics 8


9 Example of a Real-world Amplitude Spectrum University of Hamburg, Dept. Informatics 9

 Operations. Same example with FFT needs only about 0.000021 seconds.")
10 Fast Fourier-Transformation Ordinary DFT needs ~(MN) 2 operations for an image of size M x N. Example: M = N = 1024, sec/operation à 1,1 s. FFT (Fast Fourier Transform) is based on recursive decomposition of g mn into subsequences. Due to multiple use of partial results à ~ MN log 2 (MN) Operations. Same example with FFT needs only about seconds. The next slides will: introduce the decomposition scheme and give one-dimensional examplesof the FFT University of Hamburg, Dept. Informatics 10
 k e 2π jr k n!## k=0 \" $ # % = $ % & G (1) r 2n + g 2 k+1! e 2π jr g (2 ) k 1 ## + jr e π n G r (1) + e π jr 1 n G r (2) G r (1) e π jr 1 n G r (2) n 1 (2k+1) 2n ' % ( )% g (2) k e 2π jr k n!")
11 Fast Fourier-Transformation Principle of decomposition for the 1D-DFT (Cooley & Tukey, 1965): For r = 0,..., N-1 and N=2n: G r = 2n 1 g k=0 n e # n 1 % = $ g k=0 k &% n 1 g (1) k k 2π jr 2n e 2π 2k jr! = g (1) k e 2π jr k n!## k=0 " $ # % = $ % & G (1) r 2n + g 2 k+1! e 2π jr g (2 ) k 1 ## + jr e π n G r (1) + e π jr 1 n G r (2) G r (1) e π jr 1 n G r (2) n 1 (2k+1) 2n ' % ( )% g (2) k e 2π jr k n!## k=0 "## $ if r < n if r n G (2 ) r Decomposition in odd/even part Decomposition in frequency space G r = G r (1) + e π jr 1 n G r (2) G r = G r (1) e π jr 1 n G r (2) r = 0,..., n 1 r = n,..., 2n 1 All G r my be computed by (N/2) 2 instead of (N) 2 operations! University of Hamburg, Dept. Informatics 11
12 Cooley & Tukey Decomposition I Example with two values (N=2) G 0 = g 0 + e 2π j 0 g 1 = g 0 + g 1 G 1 = g 0 e 2π j 0 g 1 = g 0 g 1 Graphical representation: g 0 G 0 = g 0 + g 1 positive negative g 1 G 1 = g 0 g University of Hamburg, Dept. Informatics 12
13 Cooley & Tukey Decomposition II g 0 g 1 Example with four values (N=4) + - product G 0 = (g 0 + g 2 )+ (g 1 + g 3 ) G 2 = (g 0 + g 2 ) (g 1 + g 3 ) g 2 g 3 w 0 w 1 G 1 = (g 0 g 2 )w 0 + (g 1 g 3 )w 1 G 3 = (g 0 g 2 )w 0 (g 1 g 3 )w 1 With weights: w 0 = e 2π j 1 4 = e 1 2 π j w 1 = e 2π j 3 4 = e 3 2 π j University of Hamburg, Dept. Informatics 13
14 Cooley & Tukey Dekomposition III Example with eight values (N=8) + - product g 0 G 0 g 1 g 2 g 3 w 0 w 1 G 4 G 2 G 6 g 4 w 0 G 1 g 5 w 1 G 5 g 6 w 2 w 0 G 3 g 7 w 3 w 1 G University of Hamburg, Dept. Informatics 14
15 Convolution Convolutionis an important operationfor describingand analyzinglinear operations, e.g. filtering. Definition of2d convolution for continuous signals: g(x, y) = f (r, s) h(x r, y s) dr ds = f (x, y) h(x, y) Convolutionin the spatial domain is dual to multiplication in the frequency domain: F{ f (x, y) * h(x, y) } = F(u, v) H(u, v) F{ f (x, y) h(x, y) } = F(u, v) * H(u, v) H can be interpreted as attenuatingor amplifyingthe frequencies of F. à Convolutiondescribes filtering in the spatial domain University of Hamburg, Dept. Informatics 15
16 Filtering in the Frequency Domain A filter transforms a signal by modifying its spectrum. G(u, v) = F(u, v) H(u, v) F H G Typical filters: Fourier transform of the signal frequency transfer function of the filter modified Fourier transform of signal low-pass filter lowfrequenciespass, high frequenciesare attenuated or removed high-pass filter high frequenciespass, lowfrequenciesare attenuated or removed band-pass filter frequencies within a frequency band pass, other frequencies below or above are attenuated or removed Often (but not always) the noise part of an image is high-frequency and the signal part is low-frequency. Low-pass filtering then improves the signal-to-noise ratio University of Hamburg, Dept. Informatics 16
 = f (r, s) h(x r, y s) dr ds = f (x, y) h(x, y) Commonly used description for the effect of technical components in linear signal theory: s!")
17 Filtering in the Spatial Domain Filtering in the spatial domain is described by convolution. g(x, y) = f (r, s) h(x r, y s) dr ds = f (x, y) h(x, y) Commonly used description for the effect of technical components in linear signal theory: s!(t) = + h(r) s(t r) dr s 1 (t) h s 1 (t) s 2 (t) h s 2 (t) a s 1 (t) + b s 2 (t) h a s 1 (t) + b s 2 (t) An impulse δ as input generates the filter function h(x, y) as output: h(x, y) = h(r, s) δ(x r, y s) dr ds = h(x, y) δ(x, y) h(x, y) is often called "impulse response w.r.t. LTI systems University of Hamburg, Dept. Informatics 17
18 Ideal low-pass filter Low-pass Filters H v " $ H(u, v) = # 1 for u 2 + v 2 W u %$ 0 else W All frequencies above W are annihilated Note that the filter function h(x, y) is rotation symmetricand h(r) ~ sinc(2pwr) = sin 2pWr / (2pWr) with r 2 = x 2 + y 2 à impuls-shapedinput structuresmay produce ring-like structures as output Gaussian filter optimallysmooth boundary, both in the frequency and the spatial domain. important for several advanced image analysis methods, e.g. generating multiscale images. H(u, v) = e 1 2 (u2 +v 2 )σ 2 h(x, y) = σ 1 2π e 1 2 x 2 +y 2 σ University of Hamburg, Dept. Informatics 18

19 Discrete Filters For periodicdiscrete2d signals (e.g. discreteimages), the convolution operator which describes filtering is Each pixel g ij of the filtered image is the sum of the products ofthe original image with the mirror filter h -m,-n placed at location ij. M 1 g ij = f m,n m=0 N-1 n=0 h i m, j n Example h mn = h -m,-n is a bell-shaped function, e.g. Gaussian The filtering effect is a smoothing operation by weighted local averaging. The choice of weights of a local filter - the convolution mask - may influence the properties of the output image in important ways, e.g. with regard to remaining noise, blurred edges, artificial structures, preserved or discarded information University of Hamburg, Dept. Informatics 19
20 Matrix Notation for Discrete Filters M 1 N-1 The convolution operation g ij = f m,n h i m, j n m=0 n=0! may be expressed as matrix multiplication: g = H f!!! Vectors g and f are obtained bystackingrows (or columns) onto each other:! g T = ( g 00 g 01! g 0 N 1 g 10 g 11! g 1N 1! g M 1 0 g M 1 1! g M 1 N 1 )! f T = f 00 f 01! f 0 N 1 f 10 f 11! f 1N 1! f M 1 0 f M 1 1! f M 1 N 1 ( ) The filter matrix H is obtained byconstructing a matrix H j for each row j of h ij : " $ $ H j = $ $ $ # h j0 h j N 1 h j N 2! h j 1 h j0 h j N 1! " " " # h 1 N 1 h 1 N 2 h 1 N 3! h j 1 h j 2 " h j0 % ' ' ' ' ' & " $ $ H = $ $ # H 0 H M 1 H M 2! H 1 H 0 H N 1! " " " # H M 1 H N 2 H M 3! H 1 H 2 " H 0 % ' ' ' ' & University of Hamburg, Dept. Informatics 20

21 Avoiding Wrap-around Errors Wrap-around errorsresultfrom filter responses due to the periodic continuation of image and filter à periodicity (cf. slide 4). To avoid wrap-around errors, image and filter have to be extended e.g. by zeros. A B original image size C D original filter size M N extended image and filter size Example: M A + C - 1 N B + D University of Hamburg, Dept. Informatics 21
22 Discrete Convolution Using the FFT Convolution in the spatial domain maybe performed moreefficiently usingthe FFT. M 1 g ij! = g mn m=0 N-1 n=0 h i m, j n (MN) 2 operations needed Using the FFT andfilteringin the frequencydomain: FFT H uv FFT -1 g mn G uv G uv g mn MN log(mn) MN MN log(mn) # of operations Example with M = N = 512: straight convolution needs ~ operations convolution usingthe FFT needs ~10 7 operations University of Hamburg, Dept. Informatics 22
 = f (x, y) h( x, y) Compare with convolution: filter function is not mirrored!")
23 Convolution and Correlation The crosscorrelation function of 2 stationary stochastic processes f and h is: g(x, y) = f (r, s) h(r x, s y) dr ds = f (x, y)! h(x, y) = f (x, y) h( x, y) Compare with convolution: filter function is not mirrored! CorrelationusingFourier Transform: F{ f(x, y) o h(x, y) } = F*(u, v) H(u, v) F{ f*(x, y) h(x, y) } = F(u, v) o H(u, v) F*, f* are complex conjugates Correlation is particularly important for matching problems, e.g. matching an image with a template. Correlation maybecomputedmoreefficiently byusingthe FFT University of Hamburg, Dept. Informatics 23
 discrete images, crosscorrelation at (i, j) is M 1 N-1 c ij = f mn m=0 n=0 h m i,n j Compare with Euclidean distance between f and h at location (i,")
 2 = f mn 2 f mn h m i.n j + h m i.n j! m=0 # n=0 \"## $! m=0 ### n=0 \"### $! m=0## n=0 \"## $ Energy 05.11.15 University of Hamburg, Dept.")
24 Correlation and Matching Matching a template with an image: image template find degree of match for all locations of template find location of best match For (periodic) discrete images, crosscorrelation at (i, j) is M 1 N-1 c ij = f mn m=0 n=0 h m i,n j Compare with Euclidean distance between f and h at location (i, j): Sinceimageenergy andtemplate energy are constant, correlation measures distance M 1 N-1 ( ) 2 d ij = f mn h m i.n j m=0 M 1 n=0 N-1 ( ) 2 = f mn 2 f mn h m i.n j + h m i.n j! m=0 # n=0 "## $! m=0 ### n=0 "### $! m=0## n=0 "## $ Energy University of Hamburg, Dept. Informatics M 1 N-1 c ij M 1 N-1 ( ) 2 Energy 24
25 Principle of Image Restoration Typical degradationmodel ofa continuous 1-dimensional signal: g(t) h(t) z(t) + g (t) g(t) h(t) z(t) g (t) original signal degrading filter additive noise degraded signal How can one process g (t) to obtain a g (t) which best approximates g(t)? Note that a perfect restoration g (t) = g(t) may not be possible even if z(t) = 0.? r(t) restoring filter g (t) r(t) g (t) g (t) restored signal The ideal restoring filter H (f) = 1/H(f) may not exist because of zeros of H(f). H(f) G(f) G (f) H (f) G (f) University of Hamburg, Dept. Informatics 25
26 Image Restoration by Minimizing the MSE!! Degradation in matrix notation:! g! = H g + z Restored signal g must minimizethe mean squareerror J(g ) of the remainingdifference: min g!! H g!!! 2 J( g! "" )!!! = 2H T g" H g"" g"" ( ) = 0 g! "" = ( H T H ) 1! H T g" pseudoinverse of H If H is a squarematrix, and if H -1 exists, we can simplify: The matrix H -1 gives a perfect restorationif z = 0.! g!! = H 1! g! University of Hamburg, Dept. Informatics 26
27 Discrete Convolution of Masked Images Scenario: Greyvalues exist onlyfor a partial domain ofthe image function Examples: Cloud coverage in aerial and satellite images, Segmented areas Sensor malfunctions Problems arise at the boundaryofthe convolution kernel (Titmarsh 1926). In these areas, discrete convolutionresults in undesiredeffects. Easy fixes suffer from additional problems: 1. Exclude the boudary areas à (Strong) reduction of the resulting image space! 2. Set to zero à Errorneous values are introduced! If iterative algorithms are used, errors may also be propagatedand enhanced! Wanted: An approach, which treats masked pixel as no information instead of no intensity! University of Hamburg, Dept. Informatics 27

28 Normalized Convolution I Approach of Knutsson und Westin (1993): # % I ' = K * I I ' = K * M,A I = $ % & A K *(I M ) if A K * M 0 A K * M 0 else. with: K I A M Convolution kernel Image Applicable kernel Image mask Example: I = {250, 225, 200, 175, 150, 125, 100, 75, 50, 25, 0} M = {1, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0} K = {1, 2, 4, 8, 4, 2, 1}/ 22 A =1 K * I = {,,, 175, 150, 125, 100, 75,,, } K *(I M ) = {,,, , , 52.27, 21.59, 6.82,,, } K * M,A I = {,,, , , , , 150,,, } University of Hamburg, Dept. Informatics 28





29 IP1 - Lecture 7: Spectral Image Processing and Convolution Normalized Convolution II Example of Knutsson und Westin 10% Sampling A=1 K*I K: 2D discrete Gaussian mit σ=2, Größe:17x K *M,A I A locally restricted University of Hamburg, Dept. Informatics 29
30 Summary Normalized Convolution III Combines mask and discrete convolution, Executionspeed may beenhancedby the use offft Derives results for masked areas if at least one non-masked pixel exists within the current neighborhood à may also be used for reconstruction purpose Provides a base to extend generic algorithms to with with masked images in a clearly defined way. Restricted to certain convolution kernels (non-zero power)! Differential convolution kernels require an additional normalized convolution à Normalized differential convolution University of Hamburg, Dept. Informatics 30
Empirical Mean and Variance!
 Global Image Properties! Global image properties refer to an image as a whole rather than components. Computation of global image properties is often required for image enhancement, preceding image analysis.!
Global Image Properties! Global image properties refer to an image as a whole rather than components. Computation of global image properties is often required for image enhancement, preceding image analysis.!
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS Image Processing 1 (IP1 Bildverarbeitung 1 Lecture 5 Perspec
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS Image Processing 1 (IP1 Bildverarbeitung 1 Lecture 5 Perspec
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 14 Skeletonization and Matching Winter Semester 2015/16 Slides: Prof. Bernd Neumann
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 14 Skeletonization and Matching Winter Semester 2015/16 Slides: Prof. Bernd Neumann
Computer Vision. Filtering in the Frequency Domain
 Computer Vision Filtering in the Frequency Domain Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 Introduction
Computer Vision Filtering in the Frequency Domain Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 Introduction
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 05 Image Processing Basics 13/02/04 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 05 Image Processing Basics 13/02/04 http://www.ee.unlv.edu/~b1morris/ecg782/
Discrete Fourier Transform
 Discrete Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013 Mårten Björkman
Discrete Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013 Mårten Björkman
FILTERING IN THE FREQUENCY DOMAIN
 1 FILTERING IN THE FREQUENCY DOMAIN Lecture 4 Spatial Vs Frequency domain 2 Spatial Domain (I) Normal image space Changes in pixel positions correspond to changes in the scene Distances in I correspond
1 FILTERING IN THE FREQUENCY DOMAIN Lecture 4 Spatial Vs Frequency domain 2 Spatial Domain (I) Normal image space Changes in pixel positions correspond to changes in the scene Distances in I correspond
Computer Vision & Digital Image Processing. Periodicity of the Fourier transform
 Computer Vision & Digital Image Processing Fourier Transform Properties, the Laplacian, Convolution and Correlation Dr. D. J. Jackson Lecture 9- Periodicity of the Fourier transform The discrete Fourier
Computer Vision & Digital Image Processing Fourier Transform Properties, the Laplacian, Convolution and Correlation Dr. D. J. Jackson Lecture 9- Periodicity of the Fourier transform The discrete Fourier
DISCRETE FOURIER TRANSFORM
 DD2423 Image Processing and Computer Vision DISCRETE FOURIER TRANSFORM Mårten Björkman Computer Vision and Active Perception School of Computer Science and Communication November 1, 2012 1 Terminology:
DD2423 Image Processing and Computer Vision DISCRETE FOURIER TRANSFORM Mårten Björkman Computer Vision and Active Perception School of Computer Science and Communication November 1, 2012 1 Terminology:
Lecture 4 Filtering in the Frequency Domain. Lin ZHANG, PhD School of Software Engineering Tongji University Spring 2016
 Lecture 4 Filtering in the Frequency Domain Lin ZHANG, PhD School of Software Engineering Tongji University Spring 2016 Outline Background From Fourier series to Fourier transform Properties of the Fourier
Lecture 4 Filtering in the Frequency Domain Lin ZHANG, PhD School of Software Engineering Tongji University Spring 2016 Outline Background From Fourier series to Fourier transform Properties of the Fourier
3. Lecture. Fourier Transformation Sampling
 3. Lecture Fourier Transformation Sampling Some slides taken from Digital Image Processing: An Algorithmic Introduction using Java, Wilhelm Burger and Mark James Burge Separability ² The 2D DFT can be
3. Lecture Fourier Transformation Sampling Some slides taken from Digital Image Processing: An Algorithmic Introduction using Java, Wilhelm Burger and Mark James Burge Separability ² The 2D DFT can be
Digital Image Processing
 Digital Image Processing Image Transforms Unitary Transforms and the 2D Discrete Fourier Transform DR TANIA STATHAKI READER (ASSOCIATE PROFFESOR) IN SIGNAL PROCESSING IMPERIAL COLLEGE LONDON What is this
Digital Image Processing Image Transforms Unitary Transforms and the 2D Discrete Fourier Transform DR TANIA STATHAKI READER (ASSOCIATE PROFFESOR) IN SIGNAL PROCESSING IMPERIAL COLLEGE LONDON What is this
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 18 Mo
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 18 Mo
Computer Vision & Digital Image Processing
 Computer Vision & Digital Image Processing Image Restoration and Reconstruction I Dr. D. J. Jackson Lecture 11-1 Image restoration Restoration is an objective process that attempts to recover an image
Computer Vision & Digital Image Processing Image Restoration and Reconstruction I Dr. D. J. Jackson Lecture 11-1 Image restoration Restoration is an objective process that attempts to recover an image
GBS765 Electron microscopy
 GBS765 Electron microscopy Lecture 1 Waves and Fourier transforms 10/14/14 9:05 AM Some fundamental concepts: Periodicity! If there is some a, for a function f(x), such that f(x) = f(x + na) then function
GBS765 Electron microscopy Lecture 1 Waves and Fourier transforms 10/14/14 9:05 AM Some fundamental concepts: Periodicity! If there is some a, for a function f(x), such that f(x) = f(x + na) then function
The Continuous-time Fourier
 The Continuous-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals:
The Continuous-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals:
Announcements. Filtering. Image Filtering. Linear Filters. Example: Smoothing by Averaging. Homework 2 is due Apr 26, 11:59 PM Reading:
 Announcements Filtering Homework 2 is due Apr 26, :59 PM eading: Chapter 4: Linear Filters CSE 52 Lecture 6 mage Filtering nput Output Filter (From Bill Freeman) Example: Smoothing by Averaging Linear
Announcements Filtering Homework 2 is due Apr 26, :59 PM eading: Chapter 4: Linear Filters CSE 52 Lecture 6 mage Filtering nput Output Filter (From Bill Freeman) Example: Smoothing by Averaging Linear
TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection
 Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Image enhancement. Why image enhancement? Why image enhancement? Why image enhancement? Example of artifacts caused by image encoding
 13 Why image enhancement? Image enhancement Example of artifacts caused by image encoding Computer Vision, Lecture 14 Michael Felsberg Computer Vision Laboratory Department of Electrical Engineering 12
13 Why image enhancement? Image enhancement Example of artifacts caused by image encoding Computer Vision, Lecture 14 Michael Felsberg Computer Vision Laboratory Department of Electrical Engineering 12
ITK Filters. Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms
 ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
The Discrete-time Fourier Transform
 The Discrete-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals: The
The Discrete-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals: The
Fourier Transform 2D
 Image Processing - Lesson 8 Fourier Transform 2D Discrete Fourier Transform - 2D Continues Fourier Transform - 2D Fourier Properties Convolution Theorem Eamples = + + + The 2D Discrete Fourier Transform
Image Processing - Lesson 8 Fourier Transform 2D Discrete Fourier Transform - 2D Continues Fourier Transform - 2D Fourier Properties Convolution Theorem Eamples = + + + The 2D Discrete Fourier Transform
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
UCSD ECE153 Handout #40 Prof. Young-Han Kim Thursday, May 29, Homework Set #8 Due: Thursday, June 5, 2011
 UCSD ECE53 Handout #40 Prof. Young-Han Kim Thursday, May 9, 04 Homework Set #8 Due: Thursday, June 5, 0. Discrete-time Wiener process. Let Z n, n 0 be a discrete time white Gaussian noise (WGN) process,
UCSD ECE53 Handout #40 Prof. Young-Han Kim Thursday, May 9, 04 Homework Set #8 Due: Thursday, June 5, 0. Discrete-time Wiener process. Let Z n, n 0 be a discrete time white Gaussian noise (WGN) process,
Introduction to Computer Vision. 2D Linear Systems
 Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Fourier series: Any periodic signals can be viewed as weighted sum. different frequencies. view frequency as an
 Image Enhancement in the Frequency Domain Fourier series: Any periodic signals can be viewed as weighted sum of sinusoidal signals with different frequencies Frequency Domain: view frequency as an independent
Image Enhancement in the Frequency Domain Fourier series: Any periodic signals can be viewed as weighted sum of sinusoidal signals with different frequencies Frequency Domain: view frequency as an independent
UCSD ECE 153 Handout #46 Prof. Young-Han Kim Thursday, June 5, Solutions to Homework Set #8 (Prepared by TA Fatemeh Arbabjolfaei)
") UCSD ECE 53 Handout #46 Prof. Young-Han Kim Thursday, June 5, 04 Solutions to Homework Set #8 (Prepared by TA Fatemeh Arbabjolfaei). Discrete-time Wiener process. Let Z n, n 0 be a discrete time white
UCSD ECE 53 Handout #46 Prof. Young-Han Kim Thursday, June 5, 04 Solutions to Homework Set #8 (Prepared by TA Fatemeh Arbabjolfaei). Discrete-time Wiener process. Let Z n, n 0 be a discrete time white
Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ]
![Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ]](/thumbs/77/75889528.jpg "Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ]") CEE 615: Digital Image Processing Spatial Enhancements 1 Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ] Template (Windowing) Operations Template (window, box, kernel)
CEE 615: Digital Image Processing Spatial Enhancements 1 Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ] Template (Windowing) Operations Template (window, box, kernel)
Review of Analog Signal Analysis
 Review of Analog Signal Analysis Chapter Intended Learning Outcomes: (i) Review of Fourier series which is used to analyze continuous-time periodic signals (ii) Review of Fourier transform which is used
Review of Analog Signal Analysis Chapter Intended Learning Outcomes: (i) Review of Fourier series which is used to analyze continuous-time periodic signals (ii) Review of Fourier transform which is used
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 ECE592-064 Digital mage Processing and ntroduction to Computer Vision Depart. of ECE, NC State University nstructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Thinking in the frequency domain Convolution
ECE592-064 Digital mage Processing and ntroduction to Computer Vision Depart. of ECE, NC State University nstructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Thinking in the frequency domain Convolution
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University. Computer Vision: 4. Filtering
 I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 4. Filtering Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 4. Filtering Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 11 Oct 3 rd, 2017 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review: 2D Discrete Fourier Transform If I is an image of size N then Sin
Digital Image Processing COSC 6380/4393 Lecture 11 Oct 3 rd, 2017 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review: 2D Discrete Fourier Transform If I is an image of size N then Sin
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Today s lecture. Local neighbourhood processing. The convolution. Removing uncorrelated noise from an image The Fourier transform
 Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
2. Image Transforms. f (x)exp[ 2 jπ ux]dx (1) F(u)exp[2 jπ ux]du (2)
![2. Image Transforms. f (x)exp[ 2 jπ ux]dx (1) F(u)exp[2 jπ ux]du (2)](/thumbs/73/69504092.jpg "2. Image Transforms. f (x)exp[ 2 jπ ux]dx (1) F(u)exp[2 jπ ux]du (2)") 2. Image Transforms Transform theory plays a key role in image processing and will be applied during image enhancement, restoration etc. as described later in the course. Many image processing algorithms
2. Image Transforms Transform theory plays a key role in image processing and will be applied during image enhancement, restoration etc. as described later in the course. Many image processing algorithms
IMAGE ENHANCEMENT II (CONVOLUTION)
") MOTIVATION Recorded images often exhibit problems such as: blurry noisy Image enhancement aims to improve visual quality Cosmetic processing Usually empirical techniques, with ad hoc parameters ( whatever
MOTIVATION Recorded images often exhibit problems such as: blurry noisy Image enhancement aims to improve visual quality Cosmetic processing Usually empirical techniques, with ad hoc parameters ( whatever
System Identification & Parameter Estimation
 System Identification & Parameter Estimation Wb3: SIPE lecture Correlation functions in time & frequency domain Alfred C. Schouten, Dept. of Biomechanical Engineering (BMechE), Fac. 3mE // Delft University
System Identification & Parameter Estimation Wb3: SIPE lecture Correlation functions in time & frequency domain Alfred C. Schouten, Dept. of Biomechanical Engineering (BMechE), Fac. 3mE // Delft University
Fourier Series Representation of
 Fourier Series Representation of Periodic Signals Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline The response of LIT system
Fourier Series Representation of Periodic Signals Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline The response of LIT system
SEISMIC WAVE PROPAGATION. Lecture 2: Fourier Analysis
 SEISMIC WAVE PROPAGATION Lecture 2: Fourier Analysis Fourier Series & Fourier Transforms Fourier Series Review of trigonometric identities Analysing the square wave Fourier Transform Transforms of some
SEISMIC WAVE PROPAGATION Lecture 2: Fourier Analysis Fourier Series & Fourier Transforms Fourier Series Review of trigonometric identities Analysing the square wave Fourier Transform Transforms of some
Chapter 4 Image Enhancement in the Frequency Domain
 Chapter 4 Image Enhancement in the Frequency Domain Yinghua He School of Computer Science and Technology Tianjin University Background Introduction to the Fourier Transform and the Frequency Domain Smoothing
Chapter 4 Image Enhancement in the Frequency Domain Yinghua He School of Computer Science and Technology Tianjin University Background Introduction to the Fourier Transform and the Frequency Domain Smoothing
Lecture Notes 5: Multiresolution Analysis
 Optimization-based data analysis Fall 2017 Lecture Notes 5: Multiresolution Analysis 1 Frames A frame is a generalization of an orthonormal basis. The inner products between the vectors in a frame and
Optimization-based data analysis Fall 2017 Lecture Notes 5: Multiresolution Analysis 1 Frames A frame is a generalization of an orthonormal basis. The inner products between the vectors in a frame and
Linear Operators and Fourier Transform
 Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
Lecture 27 Frequency Response 2
 Lecture 27 Frequency Response 2 Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/6/12 1 Application of Ideal Filters Suppose we can generate a square wave with a fundamental period
Lecture 27 Frequency Response 2 Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/6/12 1 Application of Ideal Filters Suppose we can generate a square wave with a fundamental period
Wiener Filter for Deterministic Blur Model
 Wiener Filter for Deterministic Blur Model Based on Ch. 5 of Gonzalez & Woods, Digital Image Processing, nd Ed., Addison-Wesley, 00 One common application of the Wiener filter has been in the area of simultaneous
Wiener Filter for Deterministic Blur Model Based on Ch. 5 of Gonzalez & Woods, Digital Image Processing, nd Ed., Addison-Wesley, 00 One common application of the Wiener filter has been in the area of simultaneous
Filtering in Frequency Domain
 Dr. Praveen Sankaran Department of ECE NIT Calicut February 4, 2013 Outline 1 2D DFT - Review 2 2D Sampling 2D DFT - Review 2D Impulse Train s [t, z] = m= n= δ [t m T, z n Z] (1) f (t, z) s [t, z] sampled
Dr. Praveen Sankaran Department of ECE NIT Calicut February 4, 2013 Outline 1 2D DFT - Review 2 2D Sampling 2D DFT - Review 2D Impulse Train s [t, z] = m= n= δ [t m T, z n Z] (1) f (t, z) s [t, z] sampled
Histogram Processing
 Histogram Processing The histogram of a digital image with gray levels in the range [0,L-] is a discrete function h ( r k ) = n k where r k n k = k th gray level = number of pixels in the image having
Histogram Processing The histogram of a digital image with gray levels in the range [0,L-] is a discrete function h ( r k ) = n k where r k n k = k th gray level = number of pixels in the image having
G52IVG, School of Computer Science, University of Nottingham
 Image Transforms Fourier Transform Basic idea 1 Image Transforms Fourier transform theory Let f(x) be a continuous function of a real variable x. The Fourier transform of f(x) is F ( u) f ( x)exp[ j2πux]
Image Transforms Fourier Transform Basic idea 1 Image Transforms Fourier transform theory Let f(x) be a continuous function of a real variable x. The Fourier transform of f(x) is F ( u) f ( x)exp[ j2πux]
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
Satellite image deconvolution using complex wavelet packets
 Satellite image deconvolution using complex wavelet packets André Jalobeanu, Laure Blanc-Féraud, Josiane Zerubia ARIANA research group INRIA Sophia Antipolis, France CNRS / INRIA / UNSA www.inria.fr/ariana
Satellite image deconvolution using complex wavelet packets André Jalobeanu, Laure Blanc-Féraud, Josiane Zerubia ARIANA research group INRIA Sophia Antipolis, France CNRS / INRIA / UNSA www.inria.fr/ariana
Image Degradation Model (Linear/Additive)
") Image Degradation Model (Linear/Additive),,,,,,,, g x y h x y f x y x y G uv H uv F uv N uv 1 Source of noise Image acquisition (digitization) Image transmission Spatial properties of noise Statistical
Image Degradation Model (Linear/Additive),,,,,,,, g x y h x y f x y x y G uv H uv F uv N uv 1 Source of noise Image acquisition (digitization) Image transmission Spatial properties of noise Statistical
SIMG-782 Digital Image Processing Homework 6
 SIMG-782 Digital Image Processing Homework 6 Ex. 1 (Circular Convolution) Let f [1, 3, 1, 2, 0, 3] and h [ 1, 3, 2]. (a) Calculate the convolution f h assuming that both f and h are zero-padded to a length
SIMG-782 Digital Image Processing Homework 6 Ex. 1 (Circular Convolution) Let f [1, 3, 1, 2, 0, 3] and h [ 1, 3, 2]. (a) Calculate the convolution f h assuming that both f and h are zero-padded to a length
Continuous-Time Fourier Transform
 Signals and Systems Continuous-Time Fourier Transform Chang-Su Kim continuous time discrete time periodic (series) CTFS DTFS aperiodic (transform) CTFT DTFT Lowpass Filtering Blurring or Smoothing Original
Signals and Systems Continuous-Time Fourier Transform Chang-Su Kim continuous time discrete time periodic (series) CTFS DTFS aperiodic (transform) CTFT DTFT Lowpass Filtering Blurring or Smoothing Original
Hilbert Transforms in Signal Processing
 Hilbert Transforms in Signal Processing Stefan L. Hahn Artech House Boston London Contents Preface xiii Introduction 1 Chapter 1 Theory of the One-Dimensional Hilbert Transformation 3 1.1 The Concepts
Hilbert Transforms in Signal Processing Stefan L. Hahn Artech House Boston London Contents Preface xiii Introduction 1 Chapter 1 Theory of the One-Dimensional Hilbert Transformation 3 1.1 The Concepts
Linear Diffusion and Image Processing. Outline
 Outline Linear Diffusion and Image Processing Fourier Transform Convolution Image Restoration: Linear Filtering Diffusion Processes for Noise Filtering linear scale space theory Gauss-Laplace pyramid for
Outline Linear Diffusion and Image Processing Fourier Transform Convolution Image Restoration: Linear Filtering Diffusion Processes for Noise Filtering linear scale space theory Gauss-Laplace pyramid for
Computer Vision Lecture 3
 Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
System Modeling and Identification CHBE 702 Korea University Prof. Dae Ryook Yang
 System Modeling and Identification CHBE 702 Korea University Prof. Dae Ryook Yang 1-1 Course Description Emphases Delivering concepts and Practice Programming Identification Methods using Matlab Class
System Modeling and Identification CHBE 702 Korea University Prof. Dae Ryook Yang 1-1 Course Description Emphases Delivering concepts and Practice Programming Identification Methods using Matlab Class
Computational Methods CMSC/AMSC/MAPL 460
 Computational Methods CMSC/AMSC/MAPL 460 Fourier transform Balaji Vasan Srinivasan Dept of Computer Science Several slides from Prof Healy s course at UMD Last time: Fourier analysis F(t) = A 0 /2 + A
Computational Methods CMSC/AMSC/MAPL 460 Fourier transform Balaji Vasan Srinivasan Dept of Computer Science Several slides from Prof Healy s course at UMD Last time: Fourier analysis F(t) = A 0 /2 + A
MIT 2.71/2.710 Optics 10/31/05 wk9-a-1. The spatial frequency domain
 10/31/05 wk9-a-1 The spatial frequency domain Recall: plane wave propagation x path delay increases linearly with x λ z=0 θ E 0 x exp i2π sinθ + λ z i2π cosθ λ z plane of observation 10/31/05 wk9-a-2 Spatial
10/31/05 wk9-a-1 The spatial frequency domain Recall: plane wave propagation x path delay increases linearly with x λ z=0 θ E 0 x exp i2π sinθ + λ z i2π cosθ λ z plane of observation 10/31/05 wk9-a-2 Spatial
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
Lecture 10, Multirate Signal Processing Transforms as Filter Banks. Equivalent Analysis Filters of a DFT
 Lecture 10, Multirate Signal Processing Transforms as Filter Banks Equivalent Analysis Filters of a DFT From the definitions in lecture 2 we know that a DFT of a block of signal x is defined as X (k)=
Lecture 10, Multirate Signal Processing Transforms as Filter Banks Equivalent Analysis Filters of a DFT From the definitions in lecture 2 we know that a DFT of a block of signal x is defined as X (k)=
Fourier Series. Fourier Transform
 Math Methods I Lia Vas Fourier Series. Fourier ransform Fourier Series. Recall that a function differentiable any number of times at x = a can be represented as a power series n= a n (x a) n where the
Math Methods I Lia Vas Fourier Series. Fourier ransform Fourier Series. Recall that a function differentiable any number of times at x = a can be represented as a power series n= a n (x a) n where the
Multiscale Image Transforms
 Multiscale Image Transforms Goal: Develop filter-based representations to decompose images into component parts, to extract features/structures of interest, and to attenuate noise. Motivation: extract
Multiscale Image Transforms Goal: Develop filter-based representations to decompose images into component parts, to extract features/structures of interest, and to attenuate noise. Motivation: extract
Computational Methods for Astrophysics: Fourier Transforms
 Computational Methods for Astrophysics: Fourier Transforms John T. Whelan (filling in for Joshua Faber) April 27, 2011 John T. Whelan April 27, 2011 Fourier Transforms 1/13 Fourier Analysis Outline: Fourier
Computational Methods for Astrophysics: Fourier Transforms John T. Whelan (filling in for Joshua Faber) April 27, 2011 John T. Whelan April 27, 2011 Fourier Transforms 1/13 Fourier Analysis Outline: Fourier
Review Smoothing Spatial Filters Sharpening Spatial Filters. Spatial Filtering. Dr. Praveen Sankaran. Department of ECE NIT Calicut.
 Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
 Fourier Transforms For additional information, see the classic book The Fourier Transform and its Applications by Ronald N. Bracewell (which is on the shelves of most radio astronomers) and the Wikipedia
Fourier Transforms For additional information, see the classic book The Fourier Transform and its Applications by Ronald N. Bracewell (which is on the shelves of most radio astronomers) and the Wikipedia
Image Enhancement in the frequency domain. GZ Chapter 4
 Image Enhancement in the frequency domain GZ Chapter 4 Contents In this lecture we will look at image enhancement in the frequency domain The Fourier series & the Fourier transform Image Processing in
Image Enhancement in the frequency domain GZ Chapter 4 Contents In this lecture we will look at image enhancement in the frequency domain The Fourier series & the Fourier transform Image Processing in
 ESD ACCESSION LIST TRI Call Nn n 9.3 ' Copy No. / of I
ESD ACCESSION LIST TRI Call Nn n 9.3 ' Copy No. / of I F(u) = f e(t)cos2πutdt + = f e(t)cos2πutdt i f o(t)sin2πutdt = F e(u) + if o(u).
 = f e(t)cos2πutdt + = f e(t)cos2πutdt i f o(t)sin2πutdt = F e(u) + if o(u).") The (Continuous) Fourier Transform Matrix Computations and Virtual Spaces Applications in Signal/Image Processing Niclas Börlin niclas.borlin@cs.umu.se Department of Computing Science, Umeå University,
The (Continuous) Fourier Transform Matrix Computations and Virtual Spaces Applications in Signal/Image Processing Niclas Börlin niclas.borlin@cs.umu.se Department of Computing Science, Umeå University,
GATE EE Topic wise Questions SIGNALS & SYSTEMS
 www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
Lecture 04 Image Filtering
 Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Reading. 3. Image processing. Pixel movement. Image processing Y R I G Q
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Convolution Spatial Aliasing Frequency domain filtering fundamentals Applications Image smoothing Image sharpening
 Frequency Domain Filtering Correspondence between Spatial and Frequency Filtering Fourier Transform Brief Introduction Sampling Theory 2 D Discrete Fourier Transform Convolution Spatial Aliasing Frequency
Frequency Domain Filtering Correspondence between Spatial and Frequency Filtering Fourier Transform Brief Introduction Sampling Theory 2 D Discrete Fourier Transform Convolution Spatial Aliasing Frequency
Question Paper Code : AEC11T02
 Hall Ticket No Question Paper Code : AEC11T02 VARDHAMAN COLLEGE OF ENGINEERING (AUTONOMOUS) Affiliated to JNTUH, Hyderabad Four Year B. Tech III Semester Tutorial Question Bank 2013-14 (Regulations: VCE-R11)
Hall Ticket No Question Paper Code : AEC11T02 VARDHAMAN COLLEGE OF ENGINEERING (AUTONOMOUS) Affiliated to JNTUH, Hyderabad Four Year B. Tech III Semester Tutorial Question Bank 2013-14 (Regulations: VCE-R11)
Introduction to Biomedical Engineering
 Introduction to Biomedical Engineering Biosignal processing Kung-Bin Sung 6/11/2007 1 Outline Chapter 10: Biosignal processing Characteristics of biosignals Frequency domain representation and analysis
Introduction to Biomedical Engineering Biosignal processing Kung-Bin Sung 6/11/2007 1 Outline Chapter 10: Biosignal processing Characteristics of biosignals Frequency domain representation and analysis
PS403 - Digital Signal processing
 PS403 - Digital Signal processing III. DSP - Digital Fourier Series and Transforms Key Text: Digital Signal Processing with Computer Applications (2 nd Ed.) Paul A Lynn and Wolfgang Fuerst, (Publisher:
PS403 - Digital Signal processing III. DSP - Digital Fourier Series and Transforms Key Text: Digital Signal Processing with Computer Applications (2 nd Ed.) Paul A Lynn and Wolfgang Fuerst, (Publisher:
Additional Pointers. Introduction to Computer Vision. Convolution. Area operations: Linear filtering
 Additional Pointers Introduction to Computer Vision CS / ECE 181B andout #4 : Available this afternoon Midterm: May 6, 2004 W #2 due tomorrow Ack: Prof. Matthew Turk for the lecture slides. See my ECE
Additional Pointers Introduction to Computer Vision CS / ECE 181B andout #4 : Available this afternoon Midterm: May 6, 2004 W #2 due tomorrow Ack: Prof. Matthew Turk for the lecture slides. See my ECE
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
Solutions to Problems in Chapter 4
 Solutions to Problems in Chapter 4 Problems with Solutions Problem 4. Fourier Series of the Output Voltage of an Ideal Full-Wave Diode Bridge Rectifier he nonlinear circuit in Figure 4. is a full-wave
Solutions to Problems in Chapter 4 Problems with Solutions Problem 4. Fourier Series of the Output Voltage of an Ideal Full-Wave Diode Bridge Rectifier he nonlinear circuit in Figure 4. is a full-wave
Introduction to Sparsity in Signal Processing
 1 Introduction to Sparsity in Signal Processing Ivan Selesnick Polytechnic Institute of New York University Brooklyn, New York selesi@poly.edu 212 2 Under-determined linear equations Consider a system
1 Introduction to Sparsity in Signal Processing Ivan Selesnick Polytechnic Institute of New York University Brooklyn, New York selesi@poly.edu 212 2 Under-determined linear equations Consider a system
ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM. Dr. Lim Chee Chin
 ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM Dr. Lim Chee Chin Outline Introduction Discrete Fourier Series Properties of Discrete Fourier Series Time domain aliasing due to frequency
ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM Dr. Lim Chee Chin Outline Introduction Discrete Fourier Series Properties of Discrete Fourier Series Time domain aliasing due to frequency
EE6604 Personal & Mobile Communications. Week 15. OFDM on AWGN and ISI Channels
 EE6604 Personal & Mobile Communications Week 15 OFDM on AWGN and ISI Channels 1 { x k } x 0 x 1 x x x N- 2 N- 1 IDFT X X X X 0 1 N- 2 N- 1 { X n } insert guard { g X n } g X I n { } D/A ~ si ( t) X g X
EE6604 Personal & Mobile Communications Week 15 OFDM on AWGN and ISI Channels 1 { x k } x 0 x 1 x x x N- 2 N- 1 IDFT X X X X 0 1 N- 2 N- 1 { X n } insert guard { g X n } g X I n { } D/A ~ si ( t) X g X
Lecture # 06. Image Processing in Frequency Domain
 Digital Image Processing CP-7008 Lecture # 06 Image Processing in Frequency Domain Fall 2011 Outline Fourier Transform Relationship with Image Processing CP-7008: Digital Image Processing Lecture # 6 2
Digital Image Processing CP-7008 Lecture # 06 Image Processing in Frequency Domain Fall 2011 Outline Fourier Transform Relationship with Image Processing CP-7008: Digital Image Processing Lecture # 6 2
PART 1. Review of DSP. f (t)e iωt dt. F(ω) = f (t) = 1 2π. F(ω)e iωt dω. f (t) F (ω) The Fourier Transform. Fourier Transform.
e iωt dt. F(ω) = f (t) = 1 2π. F(ω)e iωt dω. f (t) F (ω) The Fourier Transform. Fourier Transform.") PART 1 Review of DSP Mauricio Sacchi University of Alberta, Edmonton, AB, Canada The Fourier Transform F() = f (t) = 1 2π f (t)e it dt F()e it d Fourier Transform Inverse Transform f (t) F () Part 1 Review
PART 1 Review of DSP Mauricio Sacchi University of Alberta, Edmonton, AB, Canada The Fourier Transform F() = f (t) = 1 2π f (t)e it dt F()e it d Fourier Transform Inverse Transform f (t) F () Part 1 Review
Math 56 Homework 5 Michael Downs
 1. (a) Since f(x) = cos(6x) = ei6x 2 + e i6x 2, due to the orthogonality of each e inx, n Z, the only nonzero (complex) fourier coefficients are ˆf 6 and ˆf 6 and they re both 1 2 (which is also seen from
1. (a) Since f(x) = cos(6x) = ei6x 2 + e i6x 2, due to the orthogonality of each e inx, n Z, the only nonzero (complex) fourier coefficients are ˆf 6 and ˆf 6 and they re both 1 2 (which is also seen from
Communication Signals (Haykin Sec. 2.4 and Ziemer Sec Sec. 2.4) KECE321 Communication Systems I
 KECE321 Communication Systems I") Communication Signals (Haykin Sec..4 and iemer Sec...4-Sec..4) KECE3 Communication Systems I Lecture #3, March, 0 Prof. Young-Chai Ko 년 3 월 일일요일 Review Signal classification Phasor signal and spectra Representation
Communication Signals (Haykin Sec..4 and iemer Sec...4-Sec..4) KECE3 Communication Systems I Lecture #3, March, 0 Prof. Young-Chai Ko 년 3 월 일일요일 Review Signal classification Phasor signal and spectra Representation
Lecture 7: Edge Detection
 #1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
#1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
INTRODUCTION Noise is present in many situations of daily life for ex: Microphones will record noise and speech. Goal: Reconstruct original signal Wie
 WIENER FILTERING Presented by N.Srikanth(Y8104060), M.Manikanta PhaniKumar(Y8104031). INDIAN INSTITUTE OF TECHNOLOGY KANPUR Electrical Engineering dept. INTRODUCTION Noise is present in many situations
WIENER FILTERING Presented by N.Srikanth(Y8104060), M.Manikanta PhaniKumar(Y8104031). INDIAN INSTITUTE OF TECHNOLOGY KANPUR Electrical Engineering dept. INTRODUCTION Noise is present in many situations
Today s lecture. The Fourier transform. Sampling, aliasing, interpolation The Fast Fourier Transform (FFT) algorithm
 algorithm") Today s lecture The Fourier transform What is it? What is it useful for? What are its properties? Sampling, aliasing, interpolation The Fast Fourier Transform (FFT) algorithm Jean Baptiste Joseph Fourier
Today s lecture The Fourier transform What is it? What is it useful for? What are its properties? Sampling, aliasing, interpolation The Fast Fourier Transform (FFT) algorithm Jean Baptiste Joseph Fourier
Tutorial 9 The Discrete Fourier Transform (DFT) SIPC , Spring 2017 Technion, CS Department
 SIPC , Spring 2017 Technion, CS Department") Tutorial 9 The Discrete Fourier Transform (DFT) SIPC 236327, Spring 2017 Technion, CS Department The DFT Matrix The DFT matrix of size M M is defined as DFT = 1 M W 0 0 W 0 W 0 W where W = e i2π M i =
Tutorial 9 The Discrete Fourier Transform (DFT) SIPC 236327, Spring 2017 Technion, CS Department The DFT Matrix The DFT matrix of size M M is defined as DFT = 1 M W 0 0 W 0 W 0 W where W = e i2π M i =
ω 0 = 2π/T 0 is called the fundamental angular frequency and ω 2 = 2ω 0 is called the
 he ime-frequency Concept []. Review of Fourier Series Consider the following set of time functions {3A sin t, A sin t}. We can represent these functions in different ways by plotting the amplitude versus
he ime-frequency Concept []. Review of Fourier Series Consider the following set of time functions {3A sin t, A sin t}. We can represent these functions in different ways by plotting the amplitude versus
6 The Fourier transform
 6 The Fourier transform In this presentation we assume that the reader is already familiar with the Fourier transform. This means that we will not make a complete overview of its properties and applications.
6 The Fourier transform In this presentation we assume that the reader is already familiar with the Fourier transform. This means that we will not make a complete overview of its properties and applications.
Fourier Transforms 1D
 Fourier Transforms 1D 3D Image Processing Alireza Ghane 1 Overview Recap Intuitions Function representations shift-invariant spaces linear, time-invariant (LTI) systems complex numbers Fourier Transforms
Fourier Transforms 1D 3D Image Processing Alireza Ghane 1 Overview Recap Intuitions Function representations shift-invariant spaces linear, time-invariant (LTI) systems complex numbers Fourier Transforms
Topic 3: Fourier Series (FS)
") ELEC264: Signals And Systems Topic 3: Fourier Series (FS) o o o o Introduction to frequency analysis of signals CT FS Fourier series of CT periodic signals Signal Symmetry and CT Fourier Series Properties
ELEC264: Signals And Systems Topic 3: Fourier Series (FS) o o o o Introduction to frequency analysis of signals CT FS Fourier series of CT periodic signals Signal Symmetry and CT Fourier Series Properties
Prof. Mohd Zaid Abdullah Room No:
 EEE 52/4 Advnced Digital Signal and Image Processing Tuesday, 00-300 hrs, Data Com. Lab. Friday, 0800-000 hrs, Data Com. Lab Prof. Mohd Zaid Abdullah Room No: 5 Email: mza@usm.my www.eng.usm.my Electromagnetic
EEE 52/4 Advnced Digital Signal and Image Processing Tuesday, 00-300 hrs, Data Com. Lab. Friday, 0800-000 hrs, Data Com. Lab Prof. Mohd Zaid Abdullah Room No: 5 Email: mza@usm.my www.eng.usm.my Electromagnetic
Gaussian derivatives
 Gaussian derivatives UCU Winter School 2017 James Pritts Czech Tecnical University January 16, 2017 1 Images taken from Noah Snavely s and Robert Collins s course notes Definition An image (grayscale)
Gaussian derivatives UCU Winter School 2017 James Pritts Czech Tecnical University January 16, 2017 1 Images taken from Noah Snavely s and Robert Collins s course notes Definition An image (grayscale)
Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems
![Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems](/thumbs/74/71250091.jpg "Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems") Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems 1 Image as a sum of basic images What if every person s portrait photo could be expressed
Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems 1 Image as a sum of basic images What if every person s portrait photo could be expressed