Optimal Interpolation
|
|
|
- Baldwin Bradford
- 5 years ago
- Views:
Transcription
1 Optimal Interpolation Optimal Interpolation and/or kriging consist in determining the BEST LINEAR ESTIMATE in the least square sense for locations xi where you have no measurements: Example 1: Collected SST ZI=? Estimated SST ZI = a Z1 + b Z2 + c Z3 Linear Estimate
2 Optimal Interpolation General Case: N measurements estimated data at location (xi,yi) linear coefficients: we attribute a weight to each collected data measured data at locations (xk,yk), k=1,...n How do we calculate the linear coefficients, wk? minimizing the estimated error variance! True Value error Estimated value

3 Optimal Interpolation ERROR VARIANCE where is the expected mean drawn form a large number of realizations or some large statistical population. NOTE: This large statistical population is usually not sampled, meaning a priori information must be given!
4 Optimal Interpolation We solve for the unknowns wk minimizing the error variance (similar to the least square problem) N unknowns, N linear equations! MATRIX FORM Do we still have a problem?
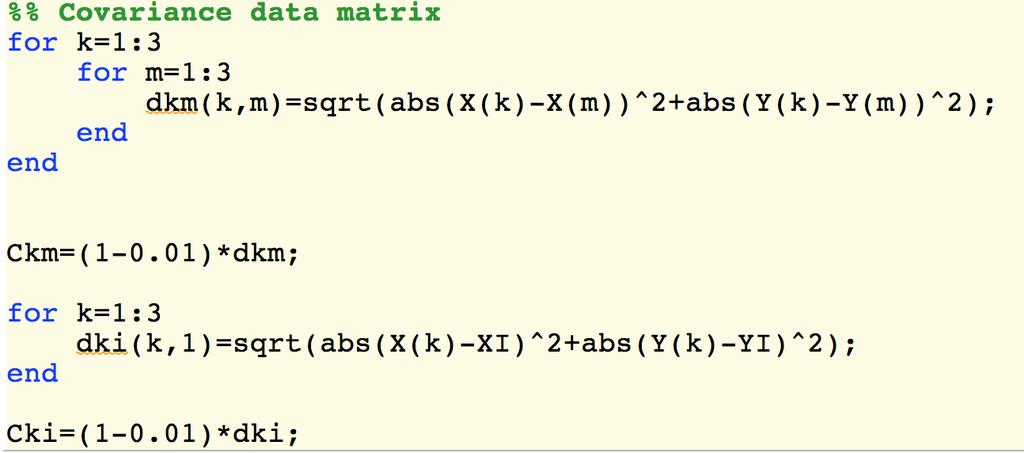
5 Optimal Interpolation Problems: The true values Zi is not known We have usually not sampled a large statistical population to estimate the <ZiZk>. We add a priori information to the problem: a covariance model, from which we are getting the Covariance Matrix The covariance between data collected at two locations depends on the distance that separates the two location NOTE: Z'k is the anomaly ( a spatial trend has been removed) refers to a spatial trend or mean
 We")
6 We go back to our linear system of N equations: We rewrite the problem using the anomalies (removing the mean or trend) We define:
7 In Matrix Form: estimated-data covariance vector data covariance matrix (a priori information) N x N if data at N locations linear coefficients ( weights ) for the optimal interpolation at location i
8 transpose NxN data covariance matrix Nx1 estimated-data covariance vector 1*N line vector of weights Nx1 vector of data estimated value at one location (xi,yi)
9 Computing the error in the mean square sense: Minimizing the mean square error has led to: Therefore:
10 Note: Therefore: 1) If no data available : Best estimate is the expected value Expected error is the Covariance of the data at zero lag
11 2) If data available : >0 The presence of data results in a reduction of the error by: Error variance estimate (or square error or confidence interval ) covariance of the data at zero lag expected error if no observations weights: nearby data that is expected to covary positively are assigned larger weights
12 Optimal Interpolation ordinary krigging We relax the assumption that we know the mean drift: To do so, we must add a constraint. In order to keep the estimate unbiased, this constraint must be: The problem now results in minimizing a function of N variables, the error variance that is function of the wk, with a constraint on the wk. Mathematically,we look for wk that satisfy:
13 In Matrix form:
14 Example:

15

16 Check that:



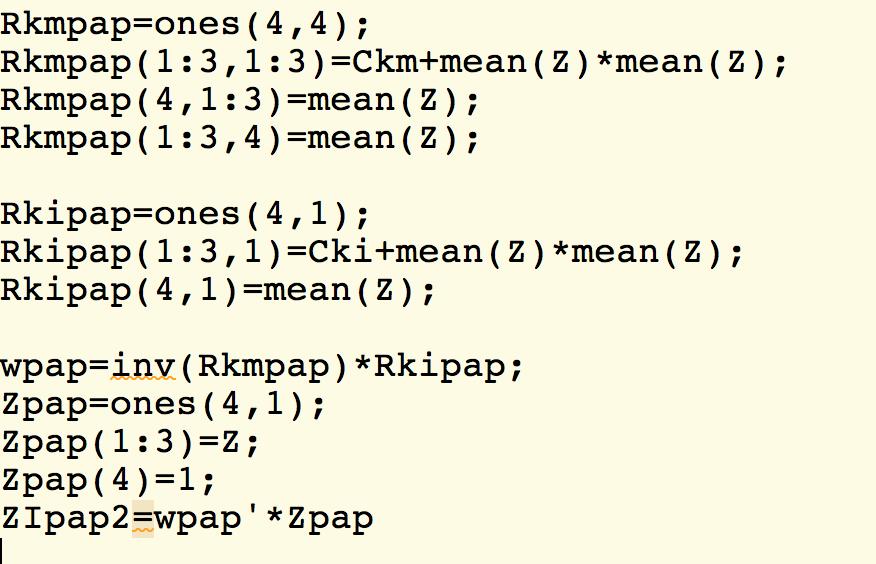
17 IF the MEAN is not removed: BAD ESTIMATE There is a better way of estimating the data, adding a variable ZN+1=1 (Papoulis, p393)
18

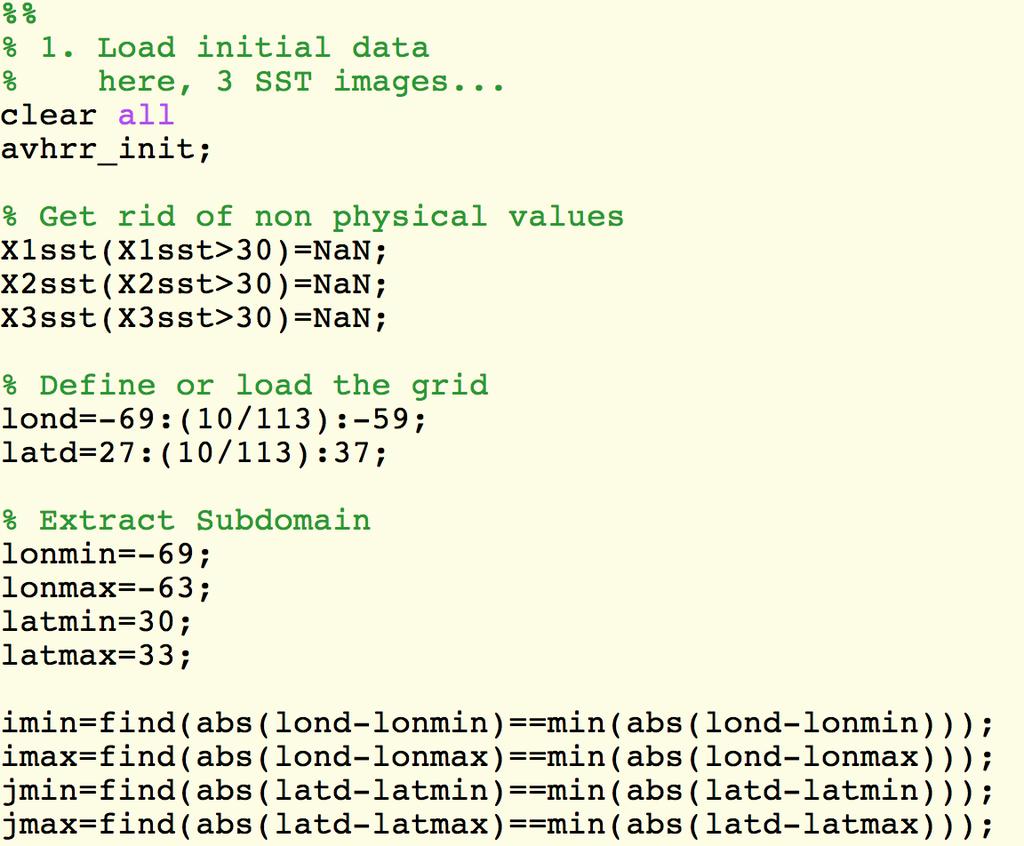
19 Example 2: AVHRR SST image with NAN values (due to clouds) 114 x 114 SST image with NaN values Objective: estimate the SST at locations where we have no data

20

21

22

23

24 The full image after filling the gaps with the ordinary krigging method

25 The error!!!!! The error is maximum at the points where we estimated data The error is maximum at points located far away (beyond d0) from good data, therefore it depends on d0 The amplitude of the error also depends on your variance (C0).
26 To do: Vary the parameter d0 chosen in the covariance model: choose large d0 and small d0 How can we objectively choose a covariance model and the parameters associated to it?
27 Variance and Covariance Variance of ONE variable Z: It is mean of square deviation of your data Covariance of TWO variables Zj and Zk:
28 Correlation Correlation coefficient of TWO variables Z j and Zk: It is a statistical measure of whether two variables are linearly related to each other perfectly positively correlated data uncorrelated data perfectly negatively correlated data Of course, if j=k, the two variables are identical, and they are perfectly correlated to each other
29 Auto Covariance Time Series You want to know to what extent the measurement you collected at time t+τ depends on the measurement you collected at time t Consider you have a times series of length N, with equally time spaced measurement Zk. We define the autocovariance because the two variables are the same) at lag nδt: Mean of the (N-n) data values starting from the n+1 measurement Mean of the (N-n) data values starting from the 1st measurement
30 Autocorrelation at zero lag: only difference with variance is the division by instead of (N-1)!
=cov0 ZN-1")
31 Z1 ZN-1 Z N Z2 C(0) Z1 ZN-1 Z N Z2 C(1) Z1 ZN-1 Z N Z2 Z1 Zn+1 Z2 C(n) Z1 Z2 Zn+1 2N+1 values with the zero lag at the middle: Czz(N)=cov0 ZN-1 ZN
32 Notes: Covariance has units! You may wish to compare several time series with different units. In that case, we use correlation. Correlation is a normalized form of covariance. Autocorrelation (when the two variables are the same): At zero lag, the autocorrelation is 1. In case of non periodic signal, it rapidly decreases as time increases. C(n) for n> N/5 usually not trustable

33 Example 1: Periodic signal... How does the covariance function look like? Title:./covariance-exemple1.eps Creator:MATLAB, The MathWorks, Inc. Vers CreationDate:03/17/ :20:30 LanguageLevel:2


34 Matlab solution: Analytic solution:


35 The covariance of a periodic signal is periodic! X axis is the lag n To convert it into unit: n Δt In our example, Δt=1 hour


36 Example 2: Mimicking a tidal signal... How does the covariance function look like?


37
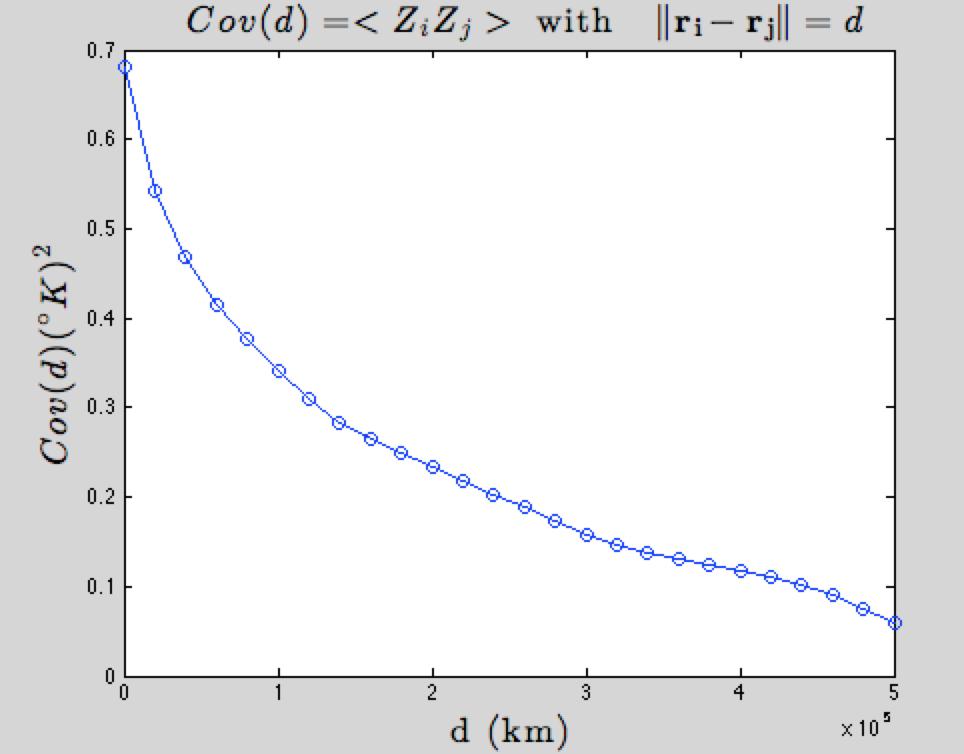
38 Auto Covariance Spatial Data You want to know to what extent the data you collected at two locations separated by a distance d depend on each other. Consider data collected at N locations, equally spaced. We define the distance autocovariance ( because the two variables are the same) at lag nd: difficult to estimate C(d), computed from experimental data and plotted as a function of the distance lag d, is named the variogram
39 variograms (covariance) models commonly used for optimal interpolation Linear: Exponential: Gaussian: Spherical:
40 C0: Unresolved variance, or measurement error found as the intercept of the variogram at d=0. This is also named the nugget Cinfty: variance between uncorrelated data pairs as lag (d) goes to infinity; This is also named the sill d0: distance beyond which data points are no longer correlated. This is also named the range
41 Problem: Choose the SST image chosen as an example for the optimal interpolation Compute the lag autocovariance function, also named variogram of this image Fit one of the covariance model to your empirical variogram Apply it to your optimal interpolation.

42



43
44 TIPS: Check the physical aspect of your estimated data Is the estimated data in a respectable range of values? If not, what can I do? Modify the parameters of the covariance model... Check the covariance matrix (see on of the next point) Check the sensitivity of your method to the covariance model. Check the sensitivity of your method to the parameters of the covariance model (nugget, sill, range) Remember that the results of the method depends on the invertibility of the covariance matrix. This means that the matrix must not be singular. Why should it be singular at the first place? The data that you use to build the variogram may have some errors. Taking into account this error can help making the covariance matrix less singular Check the error given by the method.
45 NOTES: Measured data points will influence the estimated data within the range d0. Beyond d0, they will not estimate the solution of the interpolation. If you have no data, or estimated data located beyond d0, then the best estimate given by the method will be the mean, Z0. And the error will be maximal!
46 Adding some errors to the measurements We consider a sequence of two random variable, Zk (collected data) and Zsk(signal) related by the following relation: collected data true signal noise Our purpose is the same as before: it consists in estimating some data Zi using a linear combination of the the Zk, that minimizes the error in the least square sense function to minimize

47 Adding some errors to the measurements We consider a sequence of two random variable, Zk (collected data) and Zsk(signal) related by the following relation: collected data true signal noise Our purpose is the same as before: it consists in estimating some data Zi using a linear combination of the the Zk, that minimizes the error in the least square sense function to minimize
48 Adding some errors to the measurements
 the noise attached to the")
 the signal is uncorrelated to")
49 Adding some errors to the measurements Minimizing the error, looking for a local extremum: We can simplify the problem if we make the assumption that: 1) the noise attached to the measurement collected at location rm is not correlated to the noise attached to the data collected at location rk kronecker symbol noise variance 2) the signal is uncorrelated to the noise:
50 Adding some errors to the measurements
51 Adding some errors to the measurements

52 Adding some errors to the measurements
53 Adding some errors to the measurements Minimizing the mean square error has led to: Therefore: avec
 in (")
54 SST ( C) Error (mean square sense) in ( C)2
55 To be done next year: Show that the error is orthogonal to the data, so that extremum that is found corresponds to a minimum Take an example from real data (fromvar, or TP rade)
IV. Covariance Analysis
 IV. Covariance Analysis Autocovariance Remember that when a stochastic process has time values that are interdependent, then we can characterize that interdependency by computing the autocovariance function.
IV. Covariance Analysis Autocovariance Remember that when a stochastic process has time values that are interdependent, then we can characterize that interdependency by computing the autocovariance function.
Index. Geostatistics for Environmental Scientists, 2nd Edition R. Webster and M. A. Oliver 2007 John Wiley & Sons, Ltd. ISBN:
 Index Akaike information criterion (AIC) 105, 290 analysis of variance 35, 44, 127 132 angular transformation 22 anisotropy 59, 99 affine or geometric 59, 100 101 anisotropy ratio 101 exploring and displaying
Index Akaike information criterion (AIC) 105, 290 analysis of variance 35, 44, 127 132 angular transformation 22 anisotropy 59, 99 affine or geometric 59, 100 101 anisotropy ratio 101 exploring and displaying
11/8/2018. Spatial Interpolation & Geostatistics. Kriging Step 1
 (Z i Z j ) 2 / 2 (Z i Zj) 2 / 2 Semivariance y 11/8/2018 Spatial Interpolation & Geostatistics Kriging Step 1 Describe spatial variation with Semivariogram Lag Distance between pairs of points Lag Mean
(Z i Z j ) 2 / 2 (Z i Zj) 2 / 2 Semivariance y 11/8/2018 Spatial Interpolation & Geostatistics Kriging Step 1 Describe spatial variation with Semivariogram Lag Distance between pairs of points Lag Mean
Time-lapse filtering and improved repeatability with automatic factorial co-kriging. Thierry Coléou CGG Reservoir Services Massy
 Time-lapse filtering and improved repeatability with automatic factorial co-kriging. Thierry Coléou CGG Reservoir Services Massy 1 Outline Introduction Variogram and Autocorrelation Factorial Kriging Factorial
Time-lapse filtering and improved repeatability with automatic factorial co-kriging. Thierry Coléou CGG Reservoir Services Massy 1 Outline Introduction Variogram and Autocorrelation Factorial Kriging Factorial
Chapter 6. Random Processes
 Chapter 6 Random Processes Random Process A random process is a time-varying function that assigns the outcome of a random experiment to each time instant: X(t). For a fixed (sample path): a random process
Chapter 6 Random Processes Random Process A random process is a time-varying function that assigns the outcome of a random experiment to each time instant: X(t). For a fixed (sample path): a random process
On dealing with spatially correlated residuals in remote sensing and GIS
 On dealing with spatially correlated residuals in remote sensing and GIS Nicholas A. S. Hamm 1, Peter M. Atkinson and Edward J. Milton 3 School of Geography University of Southampton Southampton SO17 3AT
On dealing with spatially correlated residuals in remote sensing and GIS Nicholas A. S. Hamm 1, Peter M. Atkinson and Edward J. Milton 3 School of Geography University of Southampton Southampton SO17 3AT
Spatial Data Mining. Regression and Classification Techniques
 Spatial Data Mining Regression and Classification Techniques 1 Spatial Regression and Classisfication Discrete class labels (left) vs. continues quantities (right) measured at locations (2D for geographic
Spatial Data Mining Regression and Classification Techniques 1 Spatial Regression and Classisfication Discrete class labels (left) vs. continues quantities (right) measured at locations (2D for geographic
Spatial Interpolation & Geostatistics
 (Z i Z j ) 2 / 2 Spatial Interpolation & Geostatistics Lag Lag Mean Distance between pairs of points 1 y Kriging Step 1 Describe spatial variation with Semivariogram (Z i Z j ) 2 / 2 Point cloud Map 3
(Z i Z j ) 2 / 2 Spatial Interpolation & Geostatistics Lag Lag Mean Distance between pairs of points 1 y Kriging Step 1 Describe spatial variation with Semivariogram (Z i Z j ) 2 / 2 Point cloud Map 3
Analytical Methods. Session 3: Statistics II. UCL Department of Civil, Environmental & Geomatic Engineering. Analytical Methods.
 Analytical Methods Session 3: Statistics II More statistical tests Quite a few more questions that we might want to ask about data that we have. Is one value significantly different to the rest, or to
Analytical Methods Session 3: Statistics II More statistical tests Quite a few more questions that we might want to ask about data that we have. Is one value significantly different to the rest, or to
Multivariate Geostatistics
 Hans Wackernagel Multivariate Geostatistics An Introduction with Applications Third, completely revised edition with 117 Figures and 7 Tables Springer Contents 1 Introduction A From Statistics to Geostatistics
Hans Wackernagel Multivariate Geostatistics An Introduction with Applications Third, completely revised edition with 117 Figures and 7 Tables Springer Contents 1 Introduction A From Statistics to Geostatistics
A robust statistically based approach to estimating the probability of contamination occurring between sampling locations
 A robust statistically based approach to estimating the probability of contamination occurring between sampling locations Peter Beck Principal Environmental Scientist Image placeholder Image placeholder
A robust statistically based approach to estimating the probability of contamination occurring between sampling locations Peter Beck Principal Environmental Scientist Image placeholder Image placeholder
Copyright The McGraw-Hill Companies, Inc. Permission required for reproduction or display.
 Chapter 15. SPATIAL INTERPOLATION 15.1 Elements of Spatial Interpolation 15.1.1 Control Points 15.1.2 Type of Spatial Interpolation 15.2 Global Methods 15.2.1 Trend Surface Models Box 15.1 A Worked Example
Chapter 15. SPATIAL INTERPOLATION 15.1 Elements of Spatial Interpolation 15.1.1 Control Points 15.1.2 Type of Spatial Interpolation 15.2 Global Methods 15.2.1 Trend Surface Models Box 15.1 A Worked Example
Geostatistics: Kriging
 Geostatistics: Kriging 8.10.2015 Konetekniikka 1, Otakaari 4, 150 10-12 Rangsima Sunila, D.Sc. Background What is Geostatitics Concepts Variogram: experimental, theoretical Anisotropy, Isotropy Lag, Sill,
Geostatistics: Kriging 8.10.2015 Konetekniikka 1, Otakaari 4, 150 10-12 Rangsima Sunila, D.Sc. Background What is Geostatitics Concepts Variogram: experimental, theoretical Anisotropy, Isotropy Lag, Sill,
Kriging Luc Anselin, All Rights Reserved
 Kriging Luc Anselin Spatial Analysis Laboratory Dept. Agricultural and Consumer Economics University of Illinois, Urbana-Champaign http://sal.agecon.uiuc.edu Outline Principles Kriging Models Spatial Interpolation
Kriging Luc Anselin Spatial Analysis Laboratory Dept. Agricultural and Consumer Economics University of Illinois, Urbana-Champaign http://sal.agecon.uiuc.edu Outline Principles Kriging Models Spatial Interpolation
ECON The Simple Regression Model
 ECON 351 - The Simple Regression Model Maggie Jones 1 / 41 The Simple Regression Model Our starting point will be the simple regression model where we look at the relationship between two variables In
ECON 351 - The Simple Regression Model Maggie Jones 1 / 41 The Simple Regression Model Our starting point will be the simple regression model where we look at the relationship between two variables In
Time Series 3. Robert Almgren. Sept. 28, 2009
 Time Series 3 Robert Almgren Sept. 28, 2009 Last time we discussed two main categories of linear models, and their combination. Here w t denotes a white noise: a stationary process with E w t ) = 0, E
Time Series 3 Robert Almgren Sept. 28, 2009 Last time we discussed two main categories of linear models, and their combination. Here w t denotes a white noise: a stationary process with E w t ) = 0, E
Gridding of precipitation and air temperature observations in Belgium. Michel Journée Royal Meteorological Institute of Belgium (RMI)
") Gridding of precipitation and air temperature observations in Belgium Michel Journée Royal Meteorological Institute of Belgium (RMI) Gridding of meteorological data A variety of hydrologic, ecological,
Gridding of precipitation and air temperature observations in Belgium Michel Journée Royal Meteorological Institute of Belgium (RMI) Gridding of meteorological data A variety of hydrologic, ecological,
Feb 21 and 25: Local weighted least squares: Quadratic loess smoother
 Feb 1 and 5: Local weighted least squares: Quadratic loess smoother An example of weighted least squares fitting of data to a simple model for the purposes of simultaneous smoothing and interpolation is
Feb 1 and 5: Local weighted least squares: Quadratic loess smoother An example of weighted least squares fitting of data to a simple model for the purposes of simultaneous smoothing and interpolation is
Exploring the World of Ordinary Kriging. Dennis J. J. Walvoort. Wageningen University & Research Center Wageningen, The Netherlands
 Exploring the World of Ordinary Kriging Wageningen University & Research Center Wageningen, The Netherlands July 2004 (version 0.2) What is? What is it about? Potential Users a computer program for exploring
Exploring the World of Ordinary Kriging Wageningen University & Research Center Wageningen, The Netherlands July 2004 (version 0.2) What is? What is it about? Potential Users a computer program for exploring
COMPARISON OF DIGITAL ELEVATION MODELLING METHODS FOR URBAN ENVIRONMENT
 COMPARISON OF DIGITAL ELEVATION MODELLING METHODS FOR URBAN ENVIRONMENT Cahyono Susetyo Department of Urban and Regional Planning, Institut Teknologi Sepuluh Nopember, Indonesia Gedung PWK, Kampus ITS,
COMPARISON OF DIGITAL ELEVATION MODELLING METHODS FOR URBAN ENVIRONMENT Cahyono Susetyo Department of Urban and Regional Planning, Institut Teknologi Sepuluh Nopember, Indonesia Gedung PWK, Kampus ITS,
Introduction. Semivariogram Cloud
 Introduction Data: set of n attribute measurements {z(s i ), i = 1,, n}, available at n sample locations {s i, i = 1,, n} Objectives: Slide 1 quantify spatial auto-correlation, or attribute dissimilarity
Introduction Data: set of n attribute measurements {z(s i ), i = 1,, n}, available at n sample locations {s i, i = 1,, n} Objectives: Slide 1 quantify spatial auto-correlation, or attribute dissimilarity
Lecture 9: Introduction to Kriging
 Lecture 9: Introduction to Kriging Math 586 Beginning remarks Kriging is a commonly used method of interpolation (prediction) for spatial data. The data are a set of observations of some variable(s) of
Lecture 9: Introduction to Kriging Math 586 Beginning remarks Kriging is a commonly used method of interpolation (prediction) for spatial data. The data are a set of observations of some variable(s) of
Soil Moisture Modeling using Geostatistical Techniques at the O Neal Ecological Reserve, Idaho
 Final Report: Forecasting Rangeland Condition with GIS in Southeastern Idaho Soil Moisture Modeling using Geostatistical Techniques at the O Neal Ecological Reserve, Idaho Jacob T. Tibbitts, Idaho State
Final Report: Forecasting Rangeland Condition with GIS in Southeastern Idaho Soil Moisture Modeling using Geostatistical Techniques at the O Neal Ecological Reserve, Idaho Jacob T. Tibbitts, Idaho State
Notes on Random Processes
 otes on Random Processes Brian Borchers and Rick Aster October 27, 2008 A Brief Review of Probability In this section of the course, we will work with random variables which are denoted by capital letters,
otes on Random Processes Brian Borchers and Rick Aster October 27, 2008 A Brief Review of Probability In this section of the course, we will work with random variables which are denoted by capital letters,
Space-time data. Simple space-time analyses. PM10 in space. PM10 in time
 Space-time data Observations taken over space and over time Z(s, t): indexed by space, s, and time, t Here, consider geostatistical/time data Z(s, t) exists for all locations and all times May consider
Space-time data Observations taken over space and over time Z(s, t): indexed by space, s, and time, t Here, consider geostatistical/time data Z(s, t) exists for all locations and all times May consider
Statistical signal processing
 Statistical signal processing Short overview of the fundamentals Outline Random variables Random processes Stationarity Ergodicity Spectral analysis Random variable and processes Intuition: A random variable
Statistical signal processing Short overview of the fundamentals Outline Random variables Random processes Stationarity Ergodicity Spectral analysis Random variable and processes Intuition: A random variable
Adaptive Systems Homework Assignment 1
 Signal Processing and Speech Communication Lab. Graz University of Technology Adaptive Systems Homework Assignment 1 Name(s) Matr.No(s). The analytical part of your homework (your calculation sheets) as
Signal Processing and Speech Communication Lab. Graz University of Technology Adaptive Systems Homework Assignment 1 Name(s) Matr.No(s). The analytical part of your homework (your calculation sheets) as
Propagation of Errors in Spatial Analysis
 Stephen F. Austin State University SFA ScholarWorks Faculty Presentations Spatial Science 2001 Propagation of Errors in Spatial Analysis Peter P. Siska I-Kuai Hung Arthur Temple College of Forestry and
Stephen F. Austin State University SFA ScholarWorks Faculty Presentations Spatial Science 2001 Propagation of Errors in Spatial Analysis Peter P. Siska I-Kuai Hung Arthur Temple College of Forestry and
Reliability and Risk Analysis. Time Series, Types of Trend Functions and Estimates of Trends
 Reliability and Risk Analysis Stochastic process The sequence of random variables {Y t, t = 0, ±1, ±2 } is called the stochastic process The mean function of a stochastic process {Y t} is the function
Reliability and Risk Analysis Stochastic process The sequence of random variables {Y t, t = 0, ±1, ±2 } is called the stochastic process The mean function of a stochastic process {Y t} is the function
Stochastic Processes. A stochastic process is a function of two variables:
 Stochastic Processes Stochastic: from Greek stochastikos, proceeding by guesswork, literally, skillful in aiming. A stochastic process is simply a collection of random variables labelled by some parameter:
Stochastic Processes Stochastic: from Greek stochastikos, proceeding by guesswork, literally, skillful in aiming. A stochastic process is simply a collection of random variables labelled by some parameter:
LINEAR MODELS IN STATISTICAL SIGNAL PROCESSING
 TERM PAPER REPORT ON LINEAR MODELS IN STATISTICAL SIGNAL PROCESSING ANIMA MISHRA SHARMA, Y8104001 BISHWAJIT SHARMA, Y8104015 Course Instructor DR. RAJESH HEDGE Electrical Engineering Department IIT Kanpur
TERM PAPER REPORT ON LINEAR MODELS IN STATISTICAL SIGNAL PROCESSING ANIMA MISHRA SHARMA, Y8104001 BISHWAJIT SHARMA, Y8104015 Course Instructor DR. RAJESH HEDGE Electrical Engineering Department IIT Kanpur
CCNY. BME I5100: Biomedical Signal Processing. Stochastic Processes. Lucas C. Parra Biomedical Engineering Department City College of New York
 BME I5100: Biomedical Signal Processing Stochastic Processes Lucas C. Parra Biomedical Engineering Department CCNY 1 Schedule Week 1: Introduction Linear, stationary, normal - the stuff biology is not
BME I5100: Biomedical Signal Processing Stochastic Processes Lucas C. Parra Biomedical Engineering Department CCNY 1 Schedule Week 1: Introduction Linear, stationary, normal - the stuff biology is not
Geostatistics in Hydrology: Kriging interpolation
 Chapter Geostatistics in Hydrology: Kriging interpolation Hydrologic properties, such as rainfall, aquifer characteristics (porosity, hydraulic conductivity, transmissivity, storage coefficient, etc.),
Chapter Geostatistics in Hydrology: Kriging interpolation Hydrologic properties, such as rainfall, aquifer characteristics (porosity, hydraulic conductivity, transmissivity, storage coefficient, etc.),
Week 5 Quantitative Analysis of Financial Markets Characterizing Cycles
 Week 5 Quantitative Analysis of Financial Markets Characterizing Cycles Christopher Ting http://www.mysmu.edu/faculty/christophert/ Christopher Ting : christopherting@smu.edu.sg : 6828 0364 : LKCSB 5036
Week 5 Quantitative Analysis of Financial Markets Characterizing Cycles Christopher Ting http://www.mysmu.edu/faculty/christophert/ Christopher Ting : christopherting@smu.edu.sg : 6828 0364 : LKCSB 5036
ELEG 3143 Probability & Stochastic Process Ch. 6 Stochastic Process
 Department of Electrical Engineering University of Arkansas ELEG 3143 Probability & Stochastic Process Ch. 6 Stochastic Process Dr. Jingxian Wu wuj@uark.edu OUTLINE 2 Definition of stochastic process (random
Department of Electrical Engineering University of Arkansas ELEG 3143 Probability & Stochastic Process Ch. 6 Stochastic Process Dr. Jingxian Wu wuj@uark.edu OUTLINE 2 Definition of stochastic process (random
Reliability Theory of Dynamically Loaded Structures (cont.)
") Outline of Reliability Theory of Dynamically Loaded Structures (cont.) Probability Density Function of Local Maxima in a Stationary Gaussian Process. Distribution of Extreme Values. Monte Carlo Simulation
Outline of Reliability Theory of Dynamically Loaded Structures (cont.) Probability Density Function of Local Maxima in a Stationary Gaussian Process. Distribution of Extreme Values. Monte Carlo Simulation
ENGRG Introduction to GIS
 ENGRG 59910 Introduction to GIS Michael Piasecki October 13, 2017 Lecture 06: Spatial Analysis Outline Today Concepts What is spatial interpolation Why is necessary Sample of interpolation (size and pattern)
ENGRG 59910 Introduction to GIS Michael Piasecki October 13, 2017 Lecture 06: Spatial Analysis Outline Today Concepts What is spatial interpolation Why is necessary Sample of interpolation (size and pattern)
Geostatistics for Gaussian processes
 Introduction Geostatistical Model Covariance structure Cokriging Conclusion Geostatistics for Gaussian processes Hans Wackernagel Geostatistics group MINES ParisTech http://hans.wackernagel.free.fr Kernels
Introduction Geostatistical Model Covariance structure Cokriging Conclusion Geostatistics for Gaussian processes Hans Wackernagel Geostatistics group MINES ParisTech http://hans.wackernagel.free.fr Kernels
Time Series 2. Robert Almgren. Sept. 21, 2009
 Time Series 2 Robert Almgren Sept. 21, 2009 This week we will talk about linear time series models: AR, MA, ARMA, ARIMA, etc. First we will talk about theory and after we will talk about fitting the models
Time Series 2 Robert Almgren Sept. 21, 2009 This week we will talk about linear time series models: AR, MA, ARMA, ARIMA, etc. First we will talk about theory and after we will talk about fitting the models
Multiple Linear Regression
 Multiple Linear Regression Simple linear regression tries to fit a simple line between two variables Y and X. If X is linearly related to Y this explains some of the variability in Y. In most cases, there
Multiple Linear Regression Simple linear regression tries to fit a simple line between two variables Y and X. If X is linearly related to Y this explains some of the variability in Y. In most cases, there
Basics in Geostatistics 2 Geostatistical interpolation/estimation: Kriging methods. Hans Wackernagel. MINES ParisTech.
 Basics in Geostatistics 2 Geostatistical interpolation/estimation: Kriging methods Hans Wackernagel MINES ParisTech NERSC April 2013 http://hans.wackernagel.free.fr Basic concepts Geostatistics Hans Wackernagel
Basics in Geostatistics 2 Geostatistical interpolation/estimation: Kriging methods Hans Wackernagel MINES ParisTech NERSC April 2013 http://hans.wackernagel.free.fr Basic concepts Geostatistics Hans Wackernagel
An Introduction to Spatial Autocorrelation and Kriging
 An Introduction to Spatial Autocorrelation and Kriging Matt Robinson and Sebastian Dietrich RenR 690 Spring 2016 Tobler and Spatial Relationships Tobler s 1 st Law of Geography: Everything is related to
An Introduction to Spatial Autocorrelation and Kriging Matt Robinson and Sebastian Dietrich RenR 690 Spring 2016 Tobler and Spatial Relationships Tobler s 1 st Law of Geography: Everything is related to
1 Class Organization. 2 Introduction
 Time Series Analysis, Lecture 1, 2018 1 1 Class Organization Course Description Prerequisite Homework and Grading Readings and Lecture Notes Course Website: http://www.nanlifinance.org/teaching.html wechat
Time Series Analysis, Lecture 1, 2018 1 1 Class Organization Course Description Prerequisite Homework and Grading Readings and Lecture Notes Course Website: http://www.nanlifinance.org/teaching.html wechat
Chapter 4 - Fundamentals of spatial processes Lecture notes
 TK4150 - Intro 1 Chapter 4 - Fundamentals of spatial processes Lecture notes Odd Kolbjørnsen and Geir Storvik January 30, 2017 STK4150 - Intro 2 Spatial processes Typically correlation between nearby sites
TK4150 - Intro 1 Chapter 4 - Fundamentals of spatial processes Lecture notes Odd Kolbjørnsen and Geir Storvik January 30, 2017 STK4150 - Intro 2 Spatial processes Typically correlation between nearby sites
A6523 Modeling, Inference, and Mining Jim Cordes, Cornell University
 A6523 Modeling, Inference, and Mining Jim Cordes, Cornell University Lecture 19 Modeling Topics plan: Modeling (linear/non- linear least squares) Bayesian inference Bayesian approaches to spectral esbmabon;
A6523 Modeling, Inference, and Mining Jim Cordes, Cornell University Lecture 19 Modeling Topics plan: Modeling (linear/non- linear least squares) Bayesian inference Bayesian approaches to spectral esbmabon;
Advanced Process Control Tutorial Problem Set 2 Development of Control Relevant Models through System Identification
 Advanced Process Control Tutorial Problem Set 2 Development of Control Relevant Models through System Identification 1. Consider the time series x(k) = β 1 + β 2 k + w(k) where β 1 and β 2 are known constants
Advanced Process Control Tutorial Problem Set 2 Development of Control Relevant Models through System Identification 1. Consider the time series x(k) = β 1 + β 2 k + w(k) where β 1 and β 2 are known constants
Porosity prediction using cokriging with multiple secondary datasets
 Cokriging with Multiple Attributes Porosity prediction using cokriging with multiple secondary datasets Hong Xu, Jian Sun, Brian Russell, Kris Innanen ABSTRACT The prediction of porosity is essential for
Cokriging with Multiple Attributes Porosity prediction using cokriging with multiple secondary datasets Hong Xu, Jian Sun, Brian Russell, Kris Innanen ABSTRACT The prediction of porosity is essential for
Frequentist-Bayesian Model Comparisons: A Simple Example
 Frequentist-Bayesian Model Comparisons: A Simple Example Consider data that consist of a signal y with additive noise: Data vector (N elements): D = y + n The additive noise n has zero mean and diagonal
Frequentist-Bayesian Model Comparisons: A Simple Example Consider data that consist of a signal y with additive noise: Data vector (N elements): D = y + n The additive noise n has zero mean and diagonal
Financial Econometrics and Quantitative Risk Managenent Return Properties
 Financial Econometrics and Quantitative Risk Managenent Return Properties Eric Zivot Updated: April 1, 2013 Lecture Outline Course introduction Return definitions Empirical properties of returns Reading
Financial Econometrics and Quantitative Risk Managenent Return Properties Eric Zivot Updated: April 1, 2013 Lecture Outline Course introduction Return definitions Empirical properties of returns Reading
Modern Navigation. Thomas Herring
 12.215 Modern Navigation Thomas Herring Estimation methods Review of last class Restrict to basically linear estimation problems (also non-linear problems that are nearly linear) Restrict to parametric,
12.215 Modern Navigation Thomas Herring Estimation methods Review of last class Restrict to basically linear estimation problems (also non-linear problems that are nearly linear) Restrict to parametric,
Square-Root Algorithms of Recursive Least-Squares Wiener Estimators in Linear Discrete-Time Stochastic Systems
 Proceedings of the 17th World Congress The International Federation of Automatic Control Square-Root Algorithms of Recursive Least-Squares Wiener Estimators in Linear Discrete-Time Stochastic Systems Seiichi
Proceedings of the 17th World Congress The International Federation of Automatic Control Square-Root Algorithms of Recursive Least-Squares Wiener Estimators in Linear Discrete-Time Stochastic Systems Seiichi
Types of Spatial Data
 Spatial Data Types of Spatial Data Point pattern Point referenced geostatistical Block referenced Raster / lattice / grid Vector / polygon Point Pattern Data Interested in the location of points, not their
Spatial Data Types of Spatial Data Point pattern Point referenced geostatistical Block referenced Raster / lattice / grid Vector / polygon Point Pattern Data Interested in the location of points, not their
Linear Regression and Its Applications
 Linear Regression and Its Applications Predrag Radivojac October 13, 2014 Given a data set D = {(x i, y i )} n the objective is to learn the relationship between features and the target. We usually start
Linear Regression and Its Applications Predrag Radivojac October 13, 2014 Given a data set D = {(x i, y i )} n the objective is to learn the relationship between features and the target. We usually start
OFTEN we need to be able to integrate point attribute information
 ALLAN A NIELSEN: GEOSTATISTICS AND ANALYSIS OF SPATIAL DATA 1 Geostatistics and Analysis of Spatial Data Allan A Nielsen Abstract This note deals with geostatistical measures for spatial correlation, namely
ALLAN A NIELSEN: GEOSTATISTICS AND ANALYSIS OF SPATIAL DATA 1 Geostatistics and Analysis of Spatial Data Allan A Nielsen Abstract This note deals with geostatistical measures for spatial correlation, namely
3.0 PROBABILITY, RANDOM VARIABLES AND RANDOM PROCESSES
 3.0 PROBABILITY, RANDOM VARIABLES AND RANDOM PROCESSES 3.1 Introduction In this chapter we will review the concepts of probabilit, rom variables rom processes. We begin b reviewing some of the definitions
3.0 PROBABILITY, RANDOM VARIABLES AND RANDOM PROCESSES 3.1 Introduction In this chapter we will review the concepts of probabilit, rom variables rom processes. We begin b reviewing some of the definitions
University of California, Los Angeles Department of Statistics. Effect of variogram parameters on kriging weights
 University of California, Los Angeles Department of Statistics Statistics C173/C273 Instructor: Nicolas Christou Effect of variogram parameters on kriging weights We will explore in this document how the
University of California, Los Angeles Department of Statistics Statistics C173/C273 Instructor: Nicolas Christou Effect of variogram parameters on kriging weights We will explore in this document how the
SIO 210: Data analysis methods L. Talley, Fall Sampling and error 2. Basic statistical concepts 3. Time series analysis
 SIO 210: Data analysis methods L. Talley, Fall 2016 1. Sampling and error 2. Basic statistical concepts 3. Time series analysis 4. Mapping 5. Filtering 6. Space-time data 7. Water mass analysis Reading:
SIO 210: Data analysis methods L. Talley, Fall 2016 1. Sampling and error 2. Basic statistical concepts 3. Time series analysis 4. Mapping 5. Filtering 6. Space-time data 7. Water mass analysis Reading:
Sequential Monte Carlo methods for filtering of unobservable components of multidimensional diffusion Markov processes
 Sequential Monte Carlo methods for filtering of unobservable components of multidimensional diffusion Markov processes Ellida M. Khazen * 13395 Coppermine Rd. Apartment 410 Herndon VA 20171 USA Abstract
Sequential Monte Carlo methods for filtering of unobservable components of multidimensional diffusion Markov processes Ellida M. Khazen * 13395 Coppermine Rd. Apartment 410 Herndon VA 20171 USA Abstract
SIO 210: Data analysis
 SIO 210: Data analysis 1. Sampling and error 2. Basic statistical concepts 3. Time series analysis 4. Mapping 5. Filtering 6. Space-time data 7. Water mass analysis 10/8/18 Reading: DPO Chapter 6 Look
SIO 210: Data analysis 1. Sampling and error 2. Basic statistical concepts 3. Time series analysis 4. Mapping 5. Filtering 6. Space-time data 7. Water mass analysis 10/8/18 Reading: DPO Chapter 6 Look
Influence of parameter estimation uncertainty in Kriging: Part 2 Test and case study applications
 Hydrology and Earth System Influence Sciences, of 5(), parameter 5 3 estimation (1) uncertainty EGS in Kriging: Part Test and case study applications Influence of parameter estimation uncertainty in Kriging:
Hydrology and Earth System Influence Sciences, of 5(), parameter 5 3 estimation (1) uncertainty EGS in Kriging: Part Test and case study applications Influence of parameter estimation uncertainty in Kriging:
Prof. Dr. Roland Füss Lecture Series in Applied Econometrics Summer Term Introduction to Time Series Analysis
 Introduction to Time Series Analysis 1 Contents: I. Basics of Time Series Analysis... 4 I.1 Stationarity... 5 I.2 Autocorrelation Function... 9 I.3 Partial Autocorrelation Function (PACF)... 14 I.4 Transformation
Introduction to Time Series Analysis 1 Contents: I. Basics of Time Series Analysis... 4 I.1 Stationarity... 5 I.2 Autocorrelation Function... 9 I.3 Partial Autocorrelation Function (PACF)... 14 I.4 Transformation
Kalman filter using the orthogonality principle
 Appendix G Kalman filter using the orthogonality principle This appendix presents derivation steps for obtaining the discrete Kalman filter equations using a method based on the orthogonality principle.
Appendix G Kalman filter using the orthogonality principle This appendix presents derivation steps for obtaining the discrete Kalman filter equations using a method based on the orthogonality principle.
Inverse of a Square Matrix. For an N N square matrix A, the inverse of A, 1
 Inverse of a Square Matrix For an N N square matrix A, the inverse of A, 1 A, exists if and only if A is of full rank, i.e., if and only if no column of A is a linear combination 1 of the others. A is
Inverse of a Square Matrix For an N N square matrix A, the inverse of A, 1 A, exists if and only if A is of full rank, i.e., if and only if no column of A is a linear combination 1 of the others. A is
UCSD ECE250 Handout #20 Prof. Young-Han Kim Monday, February 26, Solutions to Exercise Set #7
 UCSD ECE50 Handout #0 Prof. Young-Han Kim Monday, February 6, 07 Solutions to Exercise Set #7. Minimum waiting time. Let X,X,... be i.i.d. exponentially distributed random variables with parameter λ, i.e.,
UCSD ECE50 Handout #0 Prof. Young-Han Kim Monday, February 6, 07 Solutions to Exercise Set #7. Minimum waiting time. Let X,X,... be i.i.d. exponentially distributed random variables with parameter λ, i.e.,
Topic 4 Unit Roots. Gerald P. Dwyer. February Clemson University
 Topic 4 Unit Roots Gerald P. Dwyer Clemson University February 2016 Outline 1 Unit Roots Introduction Trend and Difference Stationary Autocorrelations of Series That Have Deterministic or Stochastic Trends
Topic 4 Unit Roots Gerald P. Dwyer Clemson University February 2016 Outline 1 Unit Roots Introduction Trend and Difference Stationary Autocorrelations of Series That Have Deterministic or Stochastic Trends
ArcGIS for Geostatistical Analyst: An Introduction. Steve Lynch and Eric Krause Redlands, CA.
 ArcGIS for Geostatistical Analyst: An Introduction Steve Lynch and Eric Krause Redlands, CA. Outline - What is geostatistics? - What is Geostatistical Analyst? - Spatial autocorrelation - Geostatistical
ArcGIS for Geostatistical Analyst: An Introduction Steve Lynch and Eric Krause Redlands, CA. Outline - What is geostatistics? - What is Geostatistical Analyst? - Spatial autocorrelation - Geostatistical
Stochastic Processes. Monday, November 14, 11
 Stochastic Processes 1 Definition and Classification X(, t): stochastic process: X : T! R (, t) X(, t) where is a sample space and T is time. {X(, t) is a family of r.v. defined on {, A, P and indexed
Stochastic Processes 1 Definition and Classification X(, t): stochastic process: X : T! R (, t) X(, t) where is a sample space and T is time. {X(, t) is a family of r.v. defined on {, A, P and indexed
CS 532: 3D Computer Vision 6 th Set of Notes
 1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
Introduction to Stochastic processes
 Università di Pavia Introduction to Stochastic processes Eduardo Rossi Stochastic Process Stochastic Process: A stochastic process is an ordered sequence of random variables defined on a probability space
Università di Pavia Introduction to Stochastic processes Eduardo Rossi Stochastic Process Stochastic Process: A stochastic process is an ordered sequence of random variables defined on a probability space
2. SPECTRAL ANALYSIS APPLIED TO STOCHASTIC PROCESSES
 2. SPECTRAL ANALYSIS APPLIED TO STOCHASTIC PROCESSES 2.0 THEOREM OF WIENER- KHINTCHINE An important technique in the study of deterministic signals consists in using harmonic functions to gain the spectral
2. SPECTRAL ANALYSIS APPLIED TO STOCHASTIC PROCESSES 2.0 THEOREM OF WIENER- KHINTCHINE An important technique in the study of deterministic signals consists in using harmonic functions to gain the spectral
DOA Estimation using MUSIC and Root MUSIC Methods
 DOA Estimation using MUSIC and Root MUSIC Methods EE602 Statistical signal Processing 4/13/2009 Presented By: Chhavipreet Singh(Y515) Siddharth Sahoo(Y5827447) 2 Table of Contents 1 Introduction... 3 2
DOA Estimation using MUSIC and Root MUSIC Methods EE602 Statistical signal Processing 4/13/2009 Presented By: Chhavipreet Singh(Y515) Siddharth Sahoo(Y5827447) 2 Table of Contents 1 Introduction... 3 2
Estimation and Prediction Scenarios
 Recursive BLUE BLUP and the Kalman filter: Estimation and Prediction Scenarios Amir Khodabandeh GNSS Research Centre, Curtin University of Technology, Perth, Australia IUGG 2011, Recursive 28 June BLUE-BLUP
Recursive BLUE BLUP and the Kalman filter: Estimation and Prediction Scenarios Amir Khodabandeh GNSS Research Centre, Curtin University of Technology, Perth, Australia IUGG 2011, Recursive 28 June BLUE-BLUP
Interpolation and 3D Visualization of Geodata
 Marek KULCZYCKI and Marcin LIGAS, Poland Key words: interpolation, kriging, real estate market analysis, property price index ABSRAC Data derived from property markets have spatial character, no doubt
Marek KULCZYCKI and Marcin LIGAS, Poland Key words: interpolation, kriging, real estate market analysis, property price index ABSRAC Data derived from property markets have spatial character, no doubt
PRODUCING PROBABILITY MAPS TO ASSESS RISK OF EXCEEDING CRITICAL THRESHOLD VALUE OF SOIL EC USING GEOSTATISTICAL APPROACH
 PRODUCING PROBABILITY MAPS TO ASSESS RISK OF EXCEEDING CRITICAL THRESHOLD VALUE OF SOIL EC USING GEOSTATISTICAL APPROACH SURESH TRIPATHI Geostatistical Society of India Assumptions and Geostatistical Variogram
PRODUCING PROBABILITY MAPS TO ASSESS RISK OF EXCEEDING CRITICAL THRESHOLD VALUE OF SOIL EC USING GEOSTATISTICAL APPROACH SURESH TRIPATHI Geostatistical Society of India Assumptions and Geostatistical Variogram
Spatial Backfitting of Roller Measurement Values from a Florida Test Bed
 Spatial Backfitting of Roller Measurement Values from a Florida Test Bed Daniel K. Heersink 1, Reinhard Furrer 1, and Mike A. Mooney 2 1 Institute of Mathematics, University of Zurich, CH-8057 Zurich 2
Spatial Backfitting of Roller Measurement Values from a Florida Test Bed Daniel K. Heersink 1, Reinhard Furrer 1, and Mike A. Mooney 2 1 Institute of Mathematics, University of Zurich, CH-8057 Zurich 2
Comparison of rainfall distribution method
 Team 6 Comparison of rainfall distribution method In this section different methods of rainfall distribution are compared. METEO-France is the French meteorological agency, a public administrative institution
Team 6 Comparison of rainfall distribution method In this section different methods of rainfall distribution are compared. METEO-France is the French meteorological agency, a public administrative institution
Point-Referenced Data Models
 Point-Referenced Data Models Jamie Monogan University of Georgia Spring 2013 Jamie Monogan (UGA) Point-Referenced Data Models Spring 2013 1 / 19 Objectives By the end of these meetings, participants should
Point-Referenced Data Models Jamie Monogan University of Georgia Spring 2013 Jamie Monogan (UGA) Point-Referenced Data Models Spring 2013 1 / 19 Objectives By the end of these meetings, participants should
Probability and Statistics for Final Year Engineering Students
 Probability and Statistics for Final Year Engineering Students By Yoni Nazarathy, Last Updated: May 24, 2011. Lecture 6p: Spectral Density, Passing Random Processes through LTI Systems, Filtering Terms
Probability and Statistics for Final Year Engineering Students By Yoni Nazarathy, Last Updated: May 24, 2011. Lecture 6p: Spectral Density, Passing Random Processes through LTI Systems, Filtering Terms
1.4 Properties of the autocovariance for stationary time-series
 1.4 Properties of the autocovariance for stationary time-series In general, for a stationary time-series, (i) The variance is given by (0) = E((X t µ) 2 ) 0. (ii) (h) apple (0) for all h 2 Z. ThisfollowsbyCauchy-Schwarzas
1.4 Properties of the autocovariance for stationary time-series In general, for a stationary time-series, (i) The variance is given by (0) = E((X t µ) 2 ) 0. (ii) (h) apple (0) for all h 2 Z. ThisfollowsbyCauchy-Schwarzas
Estimation techniques
 Estimation techniques March 2, 2006 Contents 1 Problem Statement 2 2 Bayesian Estimation Techniques 2 2.1 Minimum Mean Squared Error (MMSE) estimation........................ 2 2.1.1 General formulation......................................
Estimation techniques March 2, 2006 Contents 1 Problem Statement 2 2 Bayesian Estimation Techniques 2 2.1 Minimum Mean Squared Error (MMSE) estimation........................ 2 2.1.1 General formulation......................................
Further response to Cosmic Rays, Carbon Dioxide and Climate by Rahmstorf et al.
 Further response to Cosmic Rays, Carbon Dioxide and Climate by Rahmstorf et al. Nir J. Shaviv & Ján Veizer,3 Racah Institute of Physics, Hebrew University, Jerusalem, 9904 Israel Inst. für Geologie, Mineralogie
Further response to Cosmic Rays, Carbon Dioxide and Climate by Rahmstorf et al. Nir J. Shaviv & Ján Veizer,3 Racah Institute of Physics, Hebrew University, Jerusalem, 9904 Israel Inst. für Geologie, Mineralogie
Summary STK 4150/9150
 STK4150 - Intro 1 Summary STK 4150/9150 Odd Kolbjørnsen May 22 2017 Scope You are expected to know and be able to use basic concepts introduced in the book. You knowledge is expected to be larger than
STK4150 - Intro 1 Summary STK 4150/9150 Odd Kolbjørnsen May 22 2017 Scope You are expected to know and be able to use basic concepts introduced in the book. You knowledge is expected to be larger than
11. Kriging. ACE 492 SA - Spatial Analysis Fall 2003
 11. Kriging ACE 492 SA - Spatial Analysis Fall 2003 c 2003 by Luc Anselin, All Rights Reserved 1 Objectives The goal of this lab is to further familiarize yourself with ESRI s Geostatistical Analyst, extending
11. Kriging ACE 492 SA - Spatial Analysis Fall 2003 c 2003 by Luc Anselin, All Rights Reserved 1 Objectives The goal of this lab is to further familiarize yourself with ESRI s Geostatistical Analyst, extending
Using the Kalman Filter to Estimate the State of a Maneuvering Aircraft
 1 Using the Kalman Filter to Estimate the State of a Maneuvering Aircraft K. Meier and A. Desai Abstract Using sensors that only measure the bearing angle and range of an aircraft, a Kalman filter is implemented
1 Using the Kalman Filter to Estimate the State of a Maneuvering Aircraft K. Meier and A. Desai Abstract Using sensors that only measure the bearing angle and range of an aircraft, a Kalman filter is implemented
Principle Components Analysis (PCA) Relationship Between a Linear Combination of Variables and Axes Rotation for PCA
 Relationship Between a Linear Combination of Variables and Axes Rotation for PCA") Principle Components Analysis (PCA) Relationship Between a Linear Combination of Variables and Axes Rotation for PCA Principle Components Analysis: Uses one group of variables (we will call this X) In
Principle Components Analysis (PCA) Relationship Between a Linear Combination of Variables and Axes Rotation for PCA Principle Components Analysis: Uses one group of variables (we will call this X) In
Improving Spatial Data Interoperability
 Improving Spatial Data Interoperability A Framework for Geostatistical Support-To To-Support Interpolation Michael F. Goodchild, Phaedon C. Kyriakidis, Philipp Schneider, Matt Rice, Qingfeng Guan, Jordan
Improving Spatial Data Interoperability A Framework for Geostatistical Support-To To-Support Interpolation Michael F. Goodchild, Phaedon C. Kyriakidis, Philipp Schneider, Matt Rice, Qingfeng Guan, Jordan
Ch. 14 Stationary ARMA Process
 Ch. 14 Stationary ARMA Process A general linear stochastic model is described that suppose a time series to be generated by a linear aggregation of random shock. For practical representation it is desirable
Ch. 14 Stationary ARMA Process A general linear stochastic model is described that suppose a time series to be generated by a linear aggregation of random shock. For practical representation it is desirable
Chapter 4: Models for Stationary Time Series
 Chapter 4: Models for Stationary Time Series Now we will introduce some useful parametric models for time series that are stationary processes. We begin by defining the General Linear Process. Let {Y t
Chapter 4: Models for Stationary Time Series Now we will introduce some useful parametric models for time series that are stationary processes. We begin by defining the General Linear Process. Let {Y t
covariance function, 174 probability structure of; Yule-Walker equations, 174 Moving average process, fluctuations, 5-6, 175 probability structure of
 Index* The Statistical Analysis of Time Series by T. W. Anderson Copyright 1971 John Wiley & Sons, Inc. Aliasing, 387-388 Autoregressive {continued) Amplitude, 4, 94 case of first-order, 174 Associated
Index* The Statistical Analysis of Time Series by T. W. Anderson Copyright 1971 John Wiley & Sons, Inc. Aliasing, 387-388 Autoregressive {continued) Amplitude, 4, 94 case of first-order, 174 Associated
On 1.9, you will need to use the facts that, for any x and y, sin(x+y) = sin(x) cos(y) + cos(x) sin(y). cos(x+y) = cos(x) cos(y) - sin(x) sin(y).
 = sin(x) cos(y) + cos(x) sin(y). cos(x+y) = cos(x) cos(y) - sin(x) sin(y).") On 1.9, you will need to use the facts that, for any x and y, sin(x+y) = sin(x) cos(y) + cos(x) sin(y). cos(x+y) = cos(x) cos(y) - sin(x) sin(y). (sin(x)) 2 + (cos(x)) 2 = 1. 28 1 Characteristics of Time
On 1.9, you will need to use the facts that, for any x and y, sin(x+y) = sin(x) cos(y) + cos(x) sin(y). cos(x+y) = cos(x) cos(y) - sin(x) sin(y). (sin(x)) 2 + (cos(x)) 2 = 1. 28 1 Characteristics of Time
Discrete time processes
 Discrete time processes Predictions are difficult. Especially about the future Mark Twain. Florian Herzog 2013 Modeling observed data When we model observed (realized) data, we encounter usually the following
Discrete time processes Predictions are difficult. Especially about the future Mark Twain. Florian Herzog 2013 Modeling observed data When we model observed (realized) data, we encounter usually the following
CREATION OF DEM BY KRIGING METHOD AND EVALUATION OF THE RESULTS
 CREATION OF DEM BY KRIGING METHOD AND EVALUATION OF THE RESULTS JANA SVOBODOVÁ, PAVEL TUČEK* Jana Svobodová, Pavel Tuček: Creation of DEM by kriging method and evaluation of the results. Geomorphologia
CREATION OF DEM BY KRIGING METHOD AND EVALUATION OF THE RESULTS JANA SVOBODOVÁ, PAVEL TUČEK* Jana Svobodová, Pavel Tuček: Creation of DEM by kriging method and evaluation of the results. Geomorphologia
Correcting Variogram Reproduction of P-Field Simulation
 Correcting Variogram Reproduction of P-Field Simulation Julián M. Ortiz (jmo1@ualberta.ca) Department of Civil & Environmental Engineering University of Alberta Abstract Probability field simulation is
Correcting Variogram Reproduction of P-Field Simulation Julián M. Ortiz (jmo1@ualberta.ca) Department of Civil & Environmental Engineering University of Alberta Abstract Probability field simulation is
The General Linear Model (GLM)
") The General Linear Model (GLM) Dr. Frederike Petzschner Translational Neuromodeling Unit (TNU) Institute for Biomedical Engineering, University of Zurich & ETH Zurich With many thanks for slides & images
The General Linear Model (GLM) Dr. Frederike Petzschner Translational Neuromodeling Unit (TNU) Institute for Biomedical Engineering, University of Zurich & ETH Zurich With many thanks for slides & images
Minitab Project Report Assignment 3
 3.1.1 Simulation of Gaussian White Noise Minitab Project Report Assignment 3 Time Series Plot of zt Function zt 1 0. 0. zt 0-1 0. 0. -0. -0. - -3 1 0 30 0 50 Index 0 70 0 90 0 1 1 1 1 0 marks The series
3.1.1 Simulation of Gaussian White Noise Minitab Project Report Assignment 3 Time Series Plot of zt Function zt 1 0. 0. zt 0-1 0. 0. -0. -0. - -3 1 0 30 0 50 Index 0 70 0 90 0 1 1 1 1 0 marks The series
Random Matrix Theory Lecture 1 Introduction, Ensembles and Basic Laws. Symeon Chatzinotas February 11, 2013 Luxembourg
 Random Matrix Theory Lecture 1 Introduction, Ensembles and Basic Laws Symeon Chatzinotas February 11, 2013 Luxembourg Outline 1. Random Matrix Theory 1. Definition 2. Applications 3. Asymptotics 2. Ensembles
Random Matrix Theory Lecture 1 Introduction, Ensembles and Basic Laws Symeon Chatzinotas February 11, 2013 Luxembourg Outline 1. Random Matrix Theory 1. Definition 2. Applications 3. Asymptotics 2. Ensembles
Business Economics BUSINESS ECONOMICS. PAPER No. : 8, FUNDAMENTALS OF ECONOMETRICS MODULE No. : 3, GAUSS MARKOV THEOREM
 Subject Business Economics Paper No and Title Module No and Title Module Tag 8, Fundamentals of Econometrics 3, The gauss Markov theorem BSE_P8_M3 1 TABLE OF CONTENTS 1. INTRODUCTION 2. ASSUMPTIONS OF
Subject Business Economics Paper No and Title Module No and Title Module Tag 8, Fundamentals of Econometrics 3, The gauss Markov theorem BSE_P8_M3 1 TABLE OF CONTENTS 1. INTRODUCTION 2. ASSUMPTIONS OF
Linear Models in Machine Learning
 CS540 Intro to AI Linear Models in Machine Learning Lecturer: Xiaojin Zhu jerryzhu@cs.wisc.edu We briefly go over two linear models frequently used in machine learning: linear regression for, well, regression,
CS540 Intro to AI Linear Models in Machine Learning Lecturer: Xiaojin Zhu jerryzhu@cs.wisc.edu We briefly go over two linear models frequently used in machine learning: linear regression for, well, regression,
Autocorrelation Estimates of Locally Stationary Time Series
 Autocorrelation Estimates of Locally Stationary Time Series Supervisor: Jamie-Leigh Chapman 4 September 2015 Contents 1 2 Rolling Windows Exponentially Weighted Windows Kernel Weighted Windows 3 Simulated
Autocorrelation Estimates of Locally Stationary Time Series Supervisor: Jamie-Leigh Chapman 4 September 2015 Contents 1 2 Rolling Windows Exponentially Weighted Windows Kernel Weighted Windows 3 Simulated
Structure in Data. A major objective in data analysis is to identify interesting features or structure in the data.
 Structure in Data A major objective in data analysis is to identify interesting features or structure in the data. The graphical methods are very useful in discovering structure. There are basically two
Structure in Data A major objective in data analysis is to identify interesting features or structure in the data. The graphical methods are very useful in discovering structure. There are basically two