Human Motion Production
|
|
|
- Jodie Hampton
- 5 years ago
- Views:
Transcription
1
2
3
4


5 Human Motion Production External Forces & Moments Multi-Joint Dynamics Neural Command α 1 α 2 Musculotendon Dynamics F 1 F 2 Musculoskeletal Geometry T 1 T 2 EOM*.. θ 1.. θ 2. θ 1 1 θ. θ 2 θ 2 Sensory Organs Production of Movement *: equations of motions
6 Human Motion Reconstruction Multi-Joint Dynamics Motion Capture F 1 F 2 Musculoskeletal Geometry T 1 T 2 EOM*.. θ 1.. θ 2 d dt. θ 1 θ 1 d dt. θ 2 θ 2 Measured Position Data Muscle Redundancy Resolution F, F, F x y z M, M, M x y z Force Plate Data Human Motion Reconstruction *: equations of motions
7
8
9
10
11


12 History of Movement Science No natural phenomenon can be understood without carefully considering how it emerged N. A. Bernstein, On Dexterity and Its Development, 1996.

13
14 Gait Terminology


15 Gait Cycle
16 Gait Cycle
17 Gait Cycle
18 Gait Variables
19 Gait Variables
20 Gait Variables


21 Gait: Experiment and Simulation Healthy Male Free Speed (1.75m/s) Motion Capture Force Plate Electromyography 23DOF actuated by 92 muscle-tendon units
22 Muscle Activations during Normal Gait (1.75m/s)

23 Demircan E., Wheeler J., Anderson F. C., Besier T., and Delp S., EMG-Informed Computed Muscle Control for Dynamic Simulations of Movement. In Proc. of the XXII Congress of the International Society of Biomechanics, Cape Town, South Africa, July 2009
24 Constraint-Consistent Analysis of Muscle Force Contributions to Human Gait ẍ = J(q)A(q) 1 (L T m max a g(q) J T c 1 F ext1 J T c 2 F ext2 ) percent gait cycle Results Our findings Liu et al Neptune et al Liu et al Gluteus medius, vasti, hamstrings, gastrocnemius, soleus and dorsiflexors are important modulators of accelerations Demircan, E. and Khatib, O., Constraint-Consistent Analysis of Muscle Force Contributions to Human Gait, Advances in Robot Kinematics, Springer, 13th International Symposium, Innsbruck, Austria, June 2012
25 Constraint-Consistent Analysis of Muscle Force Contributions to Human Gait ẍ = J(q)A(q) 1 (L T m max a g(q) J T c 1 F ext1 J T c 2 F ext2 ) percent gait cycle Results Our findings Liu et al Neptune et al Liu et al Hamstrings and gluteus medius were primary contributors to support and progression in early stance. Demircan, E. and Khatib, O., Constraint-Consistent Analysis of Muscle Force Contributions to Human Gait, Advances in Robot Kinematics, Springer, 13th International Symposium, Innsbruck, Austria, June 2012
26 Constraint-Consistent Analysis of Muscle Force Contributions to Human Gait ẍ = J(q)A(q) 1 (L T m max a g(q) J T c 1 F ext1 J T c 2 F ext2 ) percent gait cycle Results Our findings Liu et al Neptune et al Liu et al At faster speed, greater forces in the soleus and gastrocnemius are observed in late stance. Demircan, E. and Khatib, O., Constraint-Consistent Analysis of Muscle Force Contributions to Human Gait, Advances in Robot Kinematics, Springer, 13th International Symposium, Innsbruck, Austria, June 2012
A(q) 1 (L T m max")

 didn t")


27 Constraint-Consistent Analysis of Muscle Force Contributions to Human Gait ẍ = J(q)A(q) 1 (L T m max a g(q) J T c 1 F ext1 J T c 2 F ext2 ) percent gait cycle Results Our findings Liu et al Neptune et al Liu et al Hip flexors (iliacus, psoas, rect fem) didn t contribute significantly to mass center acceleration. Demircan, E. and Khatib, O., Constraint-Consistent Analysis of Muscle Force Contributions to Human Gait, Advances in Robot Kinematics, Springer, 13th International Symposium, Innsbruck, Austria, June 2012


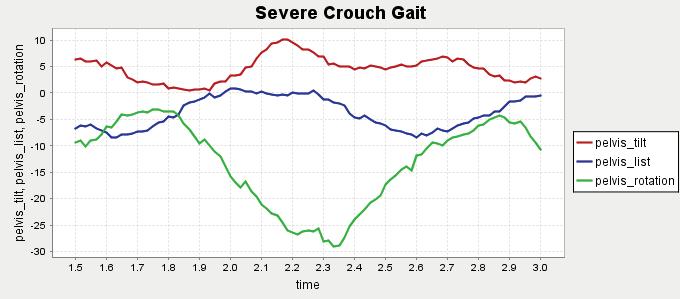
28 Musculoskeletal Disorders Crouch vs. Normal Gait




29 Reeducation of Musculoskeletal Disorders
30 Tools to Study Human Movement Biomechanical tools: Musculoskeletal models Experimental tools: Motion capture systems Force plates and EMG Animal studies Mathematical tools: Finite element methods Multi body dynamics algorithm






31 Tools to Study Human Movement Biomechanical tools: Musculoskeletal models Experimental tools: Motion capture systems Force plates and EMG Animal studies Mathematical tools: Finite element methods Multi body dynamics algorithm
32
33
34 Light Sources and Markers: Active or Primary Markers (LEDs) Passive or Secondary Markers (retroflective)
35

36 Passive markers (retroflective) Accurate 3D position data, Easy to use, continuous whole-body sensing, Synchronize with contact force, muscle activity data.
37 Sampling rate: Sampling marker positions at a fixed rate (i.e., sampling rate) Depends on the movement to be studied: Walking (25-30Hz) It is the frequency content of a movement that determines the required sample rate, not the speed Example: Fastest movements in walking (foot during middle swing phase) can be accurately measured at low sampling rates Sudden changes of the direction of movement of the heel at foot strike (although occurring at a slower speed) need a higher sampling rate (i.e., over 100Hz) for accuracy
 x (t)")

38 Data Filter x(t) x (t) x (t) Differentiation amplifies high-frequency noise

39 Example of Noisy Data

40 Differentiation of Noisy Data

41 Noise Characteristics
42


43 Force Plates

44 Ground Reaction Forces during Normal Gait


45 Ground Reaction Forces during Normal Gait
46 Electromyography Electromyography: Recording of electrical signals from the muscles during activity Electromyogram (EMG): Recorded signal Non-invasive (surface electrodes) Invasive (needles or fine wire electrodes)


47 Electromyography Historical Development Francesco Redi ( ) First to recognize connection between muscles and generation of electricity documented that electric ray fish used a highly-specialized muscle. Most famous for establishing that maggots do not spontaneously generate from rotting meat.

48 Electromyography Historical Development Luigi Galvani Credited as the father of neurophysiology for his work with frogs legs 1791 (animal electricity) Showed that electrical stimulation of muscular tissue produces contraction and force. Because of limited instrumentation, his work was not fully accepted until almost 40 years later.


49 Electromyography Historical Development Alessandro Volta ( ) Replaced the frog s legs with brine-soaked paper to detect the flow of electricity Developed a device which produced electricity, which could be used to stimulate muscles. Volta s Law of Electrochemical Series: The electromotive force of a galvanic cell is the difference between the electrode potentials Invented the first electric battery. The modern term volt comes from his name.
50 Raw EMG Rectify Low-pass filter High-pass filter Normalize





51 Muscle Activations during Normal Gait (1.75m/s)
52


53 Subject Model Scale Measurement-based scaling Delp 90 Holzbaur 05 Delp et al 00
54 Human Motion Reconstruction Multi-Joint Dynamics Motion Capture F 1 F 2 Musculoskeletal Geometry T 1 T 2 EOM*.. θ 1.. θ 2 d dt. θ 1 θ 1 d dt. θ 2 θ 2 Measured Position Data Muscle Redundancy Resolution F, F, F x y z M, M, M x y z Force Plate Data Human Motion Reconstruction *: equations of motions
55
56 How to Reconstruct Human Motion? Control and Simulation Framework Reproducing human movement using robotic algorithms and techniques Human are complex articulated body systems Robotics brought efficient algorithms and tools for analysis and control Redundancy resolution Multiple contact and constraints Whole-body control, real-time Actuation and dynamics characterization tools

 k p (x")

57 Human Motion Reconstruction via Direct Marker Control Motion Control in Marker Space F m i =ẍ mi,des k v (ẋ mi ẋ mi,des ) k p (x mi x mi,des ) FR = FΛ ΛF + μ + p + R F * Conventional IK techniques are kinematic based
58 Operational Space Formulation Task and Posture Decomposition Γ=Γ task +Γ posture = J T t F t + N T t Γ p where Γ posture =(J p N t ) T F p = J T p tf p t Γ=J T t F t + J T p tf p t For n tasks: Γ=J T t 1 F t1 + J T t 2 t 1 F t2 t J T t n t n 1... t 1 F tn t n 1... t 1

59 Constraint-Consistent Task Space Framework Task, Posture, Constraints, Multiple Contacts, and Balance Balance Internal Constraints Self Collision Local Obstacles Contact Task Posture
60 Whole-body Control of Marker Task Tracking the Actual Markers of Human Movement Γ=Γ m1 +Γ m2 = J T m 1 F m1 + N T m 1 Γ m2 where Γ m2 =(J m2 N m1 ) T F m2 = J T m 2 m 1 F m2 m 1 Γ=J T m 1 F m1 + J T m 2 m 1 F m2 m 1 For n marker tasks: Γ=J T m 1 F m1 + J T m 2 m 1 F m2 m J T m n m n 1... m 1 F mn m n 1... m 1
61 Task Space Control Framework Prioritized Control of Marker Tasks Marker Task 1 Marker Task 2 Marker Task n Γ=J m T Jm T 1 F m1 + Jm T 2 m 1 F m2 m 1 n m n 1... m 1 F mn m n 1... m 1
62 Constraint-Consistent Task Space Framework Task, Posture, Constraints, Multiple Contacts, and Balance Balance Internal Constraints Self Collision Local Obstacles Contact Task Posture

63 Constraint-Consistent Task Space Framework Task, Posture, Constraints, Multiple Contacts, and Balance Constraints: Contact Joint limits Collision Avoidance Balance Marker Tasks: Marker Task 1 Marker Task 2 Marker Task n Posture: Body Symmetry Body Orientation Effort Minimization






64 Experiment Tai Chi Motion Sequence Level 1 Level 2 Level 3 Level 4 Balance Rshoulder Rwrist Posture Lwrist Lelbow Average error in position: 0.005m Average error in joint angle: rad Demircan, E., Sentis, L., DeSapio, V., and Khatib, O., Human Motion Reconstruction by Direct Control of Marker Trajectories, Advances in Robot Kinematics, Springer, 11th International Symposium, Batz-sur-Mer, France, June 2008.
65 Margin of Errors over the Trajectory Joint angle error magnitudes show a stable variation over the trajectory, ensuring well bounded errors on the joint angles.


66 Experiment Throwing Whole-Body Motion Reconstruction with Human Musculoskeletal Model Level 1 Level 2 Level 3 Level 4 Pelvis Torso Lupperarm Posture Lhand Lthigh Rupperarm Additional Behaviors Rhand Rthigh Ltibia Lmt5 Lforearm Rtibia Rmt5 Rforearm Lknuckle Lcalcaneus Rknuckle Rcalcaneus Tasks in three-level marker space Sets of 22 experimental marker trajectories Demircan, E., Besier, T., Menon, S., and Khatib, O., Human Motion Reconstruction and Synthesis of Human Skills, Advances in Robot Kinematics, Springer, 12th International Symposium, Piran-Portoroz, Slovenia, June 2010
67 Experiment Throwing Tracking Results Hand marker trajectories in marker task space Tracking the trajectories with little error (0-4cm) Principal error source: scapular elevation and depression of the shoulder
68
69
70
Reading. Realistic Character Animation. Modeling Realistic Motion. Two Approaches
 Realistic Character Animation Reading Jessica Hodgins,,et.al,Animating Human Athletics,, SIGGRAPH 95 Zoran Popović, Changing Physics for Character Animation,, SIGGRAPH 00 2 Modeling Realistic Motion Model
Realistic Character Animation Reading Jessica Hodgins,,et.al,Animating Human Athletics,, SIGGRAPH 95 Zoran Popović, Changing Physics for Character Animation,, SIGGRAPH 00 2 Modeling Realistic Motion Model
BIOMECHANICS AND MOTOR CONTROL OF HUMAN MOVEMENT
 BIOMECHANICS AND MOTOR CONTROL OF HUMAN MOVEMENT Third Edition DAVID Α. WINTER University of Waterloo Waterloo, Ontario, Canada WILEY JOHN WILEY & SONS, INC. CONTENTS Preface to the Third Edition xv 1
BIOMECHANICS AND MOTOR CONTROL OF HUMAN MOVEMENT Third Edition DAVID Α. WINTER University of Waterloo Waterloo, Ontario, Canada WILEY JOHN WILEY & SONS, INC. CONTENTS Preface to the Third Edition xv 1
Mechanical energy transfer by internal force during the swing phase of running
 Available online at www.sciencedirect.com Procedia Engineering 34 (2012 ) 772 777 9 th Conference of the International Sports Engineering Association (ISEA) Mechanical energy transfer by internal force
Available online at www.sciencedirect.com Procedia Engineering 34 (2012 ) 772 777 9 th Conference of the International Sports Engineering Association (ISEA) Mechanical energy transfer by internal force
Human Gait Modeling: Dealing with Holonomic Constraints
 Human Gait Modeling: Dealing with Holonomic Constraints Tingshu Hu 1 Zongli Lin 1 Mark F. Abel 2 Paul E. Allaire 3 Abstract Dynamical models are fundamental for the study of human gait. This paper presents
Human Gait Modeling: Dealing with Holonomic Constraints Tingshu Hu 1 Zongli Lin 1 Mark F. Abel 2 Paul E. Allaire 3 Abstract Dynamical models are fundamental for the study of human gait. This paper presents
Modularity in the motor system: decomposition of muscle patterns as combinations of time-varying synergies
 Modularity in the motor system: decomposition of muscle patterns as combinations of time-varying synergies Andrea d Avella and Matthew C. Tresch Department of Brain and Cognitive Sciences Massachusetts
Modularity in the motor system: decomposition of muscle patterns as combinations of time-varying synergies Andrea d Avella and Matthew C. Tresch Department of Brain and Cognitive Sciences Massachusetts
An Approach and Implementation for Coupling Neurocognitive and Neuromechanical Models
 An Approach and Implementation for Coupling Neurocognitive and Neuromechanical Models Stephanie Goldfarb, Darren Earl, and Vincent De Sapio Information & Systems Sciences Lab HRL Laboratories, LLC Malibu,
An Approach and Implementation for Coupling Neurocognitive and Neuromechanical Models Stephanie Goldfarb, Darren Earl, and Vincent De Sapio Information & Systems Sciences Lab HRL Laboratories, LLC Malibu,
Stepping Motion for a Human-like Character to Maintain Balance against Large Perturbations
 Stepping Motion for a Human-like Character to Maintain Balance against Large Perturbations Shunsuke Kudoh University of Tokyo Tokyo, Japan Email: kudoh@cvl.iis.u-tokyo.ac.jp Taku Komura City University
Stepping Motion for a Human-like Character to Maintain Balance against Large Perturbations Shunsuke Kudoh University of Tokyo Tokyo, Japan Email: kudoh@cvl.iis.u-tokyo.ac.jp Taku Komura City University
Multi-body power analysis of kicking motion based on a double pendulum
 Available online at wwwsciencedirectcom Procedia Engineering 34 (22 ) 28 223 9 th Conference of the International Sports Engineering Association (ISEA) Multi-body power analysis of kicking motion based
Available online at wwwsciencedirectcom Procedia Engineering 34 (22 ) 28 223 9 th Conference of the International Sports Engineering Association (ISEA) Multi-body power analysis of kicking motion based
Application of Newton/GMRES Method to Nonlinear Model Predictive Control of Functional Electrical Stimulation
 Proceedings of the 3 rd International Conference on Control, Dynamic Systems, and Robotics (CDSR 16) Ottawa, Canada May 9 10, 2016 Paper No. 121 DOI: 10.11159/cdsr16.121 Application of Newton/GMRES Method
Proceedings of the 3 rd International Conference on Control, Dynamic Systems, and Robotics (CDSR 16) Ottawa, Canada May 9 10, 2016 Paper No. 121 DOI: 10.11159/cdsr16.121 Application of Newton/GMRES Method
Angular Motion Maximum Hand, Foot, or Equipment Linear Speed
 Motion Maximum Hand, Foot, or Equipment Linear Speed Biomechanical Model: Mo3on Maximum Hand, Foot, or Equipment Linear Speed Hand, Foot, or Equipment Linear Speed Sum of Joint Linear Speeds Principle
Motion Maximum Hand, Foot, or Equipment Linear Speed Biomechanical Model: Mo3on Maximum Hand, Foot, or Equipment Linear Speed Hand, Foot, or Equipment Linear Speed Sum of Joint Linear Speeds Principle
Biomechanical Modelling of Musculoskeletal Systems
 Biomechanical Modelling of Musculoskeletal Systems Lecture 6 Presented by Phillip Tran AMME4981/9981 Semester 1, 2016 The University of Sydney Slide 1 The Musculoskeletal System The University of Sydney
Biomechanical Modelling of Musculoskeletal Systems Lecture 6 Presented by Phillip Tran AMME4981/9981 Semester 1, 2016 The University of Sydney Slide 1 The Musculoskeletal System The University of Sydney
FLORANIUM - Interacting with green plants
 FLORANIUM - Interacting with green plants by Martin Heine I wish I could remember who was responsible for that most life changing gift I have ever received: The book The secret life of plants on my 15th
FLORANIUM - Interacting with green plants by Martin Heine I wish I could remember who was responsible for that most life changing gift I have ever received: The book The secret life of plants on my 15th
You Are How You Walk: Gait Recognition from Motion Capture Data
 You Are How You Walk: Gait Recognition from Motion Capture Data Michal Balazia Faculty of Informatics, Masaryk University, Brno, Czech Republic https://gait.fi.muni.cz Michal Balazia FI MU) Gait Recognition
You Are How You Walk: Gait Recognition from Motion Capture Data Michal Balazia Faculty of Informatics, Masaryk University, Brno, Czech Republic https://gait.fi.muni.cz Michal Balazia FI MU) Gait Recognition
A robotic closed-loop scheme to model human postural coordination
 The 9 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 9 St. Louis, USA A robotic closed-loop scheme to model human postural coordination Vincent Bonnet, Philippe Fraisse,
The 9 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 9 St. Louis, USA A robotic closed-loop scheme to model human postural coordination Vincent Bonnet, Philippe Fraisse,
Adaptive Control of Human Posture in a Specific Movement
 Journal of Informatics and Computer Engineering (JICE) Vol. 2(5), Oct. 216, pp. 195-199 Adaptive Control of Human Posture in a Specific Movement Seyyed Arash Haghpanah School of Mechanical Engineering,
Journal of Informatics and Computer Engineering (JICE) Vol. 2(5), Oct. 216, pp. 195-199 Adaptive Control of Human Posture in a Specific Movement Seyyed Arash Haghpanah School of Mechanical Engineering,
Dynamic Optimization of the Sit-to-Stand Movement
 Journal of Applied Biomechanics, 011, 7, 306-313 011 Human Kinetics, Inc. Dynamic Optimization of the Sit-to-Stand Movement Hiroshi R. Yamasaki, 1 Hiroyuki Kambara, and Yasuharu Koike 1 Showa University;
Journal of Applied Biomechanics, 011, 7, 306-313 011 Human Kinetics, Inc. Dynamic Optimization of the Sit-to-Stand Movement Hiroshi R. Yamasaki, 1 Hiroyuki Kambara, and Yasuharu Koike 1 Showa University;
ANALYSIS AND SIMULATION OF MECHANICAL LOADS ON THE HUMAN MUSCULOSKELETAL SYSTEM: A METHODOLOGICAL OVERVIEW. Anton J.
 ANALYSIS AND SIMULATION OF MECHANICAL LOADS ON THE HUMAN MUSCULOSKELETAL SYSTEM: A METHODOLOGICAL OVERVIEW Anton J. van den Bogert Human Performance Laboratory University of Calgary, Canada Exercise and
ANALYSIS AND SIMULATION OF MECHANICAL LOADS ON THE HUMAN MUSCULOSKELETAL SYSTEM: A METHODOLOGICAL OVERVIEW Anton J. van den Bogert Human Performance Laboratory University of Calgary, Canada Exercise and
EMG Based Approach for Wearer-centered Control of a Knee Joint Actuated Orthosis
 213 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 213. Tokyo, Japan EMG Based Approach for Wearer-centered Control of a Knee Joint Actuated Orthosis Walid Hassani,
213 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 213. Tokyo, Japan EMG Based Approach for Wearer-centered Control of a Knee Joint Actuated Orthosis Walid Hassani,
CHANGING SPEED IN A SIMPLE WALKER WITH DYNAMIC ONE-STEP TRANSITIONS
 Preface In this thesis I describe the main part of the research I did at the Delft Biorobotics Lab to finish my master in BioMechanical Engineering at the 3ME faculty of the Delft University of Technology.
Preface In this thesis I describe the main part of the research I did at the Delft Biorobotics Lab to finish my master in BioMechanical Engineering at the 3ME faculty of the Delft University of Technology.
Abstract. Final Degree Project - Olga Pätkau
 Abstract I Abstract In this thesis, two different control strategies are applied to the forward dynamic simulation of multibody systems in order to track a given reference motion. For this purpose, two
Abstract I Abstract In this thesis, two different control strategies are applied to the forward dynamic simulation of multibody systems in order to track a given reference motion. For this purpose, two
TASK-ORIENTED CONTROL OF HUMANOID ROBOTS THROUGH PRIORITIZATION
 c IEEE-RAS/RSJ International Conference on Humanoid Robots TASK-ORIENTED CONTROL OF HUMANOID ROBOTS THROUGH PRIORITIZATION LUIS SENTIS AND OUSSAMA KHATIB Artificial Intelligence Laboratory Stanford University
c IEEE-RAS/RSJ International Conference on Humanoid Robots TASK-ORIENTED CONTROL OF HUMANOID ROBOTS THROUGH PRIORITIZATION LUIS SENTIS AND OUSSAMA KHATIB Artificial Intelligence Laboratory Stanford University
A consideration on position of center of ground reaction force in upright posture
 sice02-0206 A consideration on position of center of ground reaction force in upright posture Satoshi Ito ),2) Yoshihisa Saka ) Haruhisa Kawasaki ) satoshi@robo.mech.gifu-u.ac.jp h33208@guedu.cc.gifu-u.ac.jp
sice02-0206 A consideration on position of center of ground reaction force in upright posture Satoshi Ito ),2) Yoshihisa Saka ) Haruhisa Kawasaki ) satoshi@robo.mech.gifu-u.ac.jp h33208@guedu.cc.gifu-u.ac.jp
Using Perturbations to Probe the Neural Control of Rhythmic Movements
 Using Perturbations to Probe the Neural Control of Rhythmic Movements Tim Kiemel, David Logan, John J. Jeka, Department of Kinesiology, University of Maryland, Departments of Kinesiology and Bioengineering
Using Perturbations to Probe the Neural Control of Rhythmic Movements Tim Kiemel, David Logan, John J. Jeka, Department of Kinesiology, University of Maryland, Departments of Kinesiology and Bioengineering
VALIDATION OF AN INSTRUMENTED WALKWAY DESIGNED FOR ESTIMATION OF THE ANKLE IMPEDANCE IN SAGITTAL AND FRONTAL PLANES
 Proceedings of the ASME 2016 Dynamic Systems and Control Conference DSCC2016 October 12-14, 2016, Minneapolis, Minnesota, USA DSCC2016-9660 VALIDATION OF AN INSTRUMENTED WALKWAY DESIGNED FOR ESTIMATION
Proceedings of the ASME 2016 Dynamic Systems and Control Conference DSCC2016 October 12-14, 2016, Minneapolis, Minnesota, USA DSCC2016-9660 VALIDATION OF AN INSTRUMENTED WALKWAY DESIGNED FOR ESTIMATION
Passivity-based Control for 2DOF Robot Manipulators with Antagonistic Bi-articular Muscles
 Passivity-based Control for 2DOF Robot Manipulators with Antagonistic Bi-articular Muscles Hiroyuki Kawai, Toshiyuki Murao, Ryuichi Sato and Masayuki Fujita Abstract This paper investigates a passivity-based
Passivity-based Control for 2DOF Robot Manipulators with Antagonistic Bi-articular Muscles Hiroyuki Kawai, Toshiyuki Murao, Ryuichi Sato and Masayuki Fujita Abstract This paper investigates a passivity-based
Fundamental problems in the analysis of skilled action (Saltzman 1995) Degrees of freedom Spatiotemporal form Invariance
 Degrees of freedom Spatiotemporal form Invariance") Fundamental problems in the analysis of skilled action (Saltzman 1995) Degrees of freedom Spatiotemporal form Invariance 1 Degrees of Freedom Actions require the the coordination of a large number of (potentially)
Fundamental problems in the analysis of skilled action (Saltzman 1995) Degrees of freedom Spatiotemporal form Invariance 1 Degrees of Freedom Actions require the the coordination of a large number of (potentially)
physical interaction enhance performance minimizing the risk
 Kin 420 Midterm 1 review What are Tichauer s 15 principles o Keep elbows in o Minimize spine moments o Avoid covert lifting tasks o Gender differences o Optimize joint position for max muscle force o Reduce
Kin 420 Midterm 1 review What are Tichauer s 15 principles o Keep elbows in o Minimize spine moments o Avoid covert lifting tasks o Gender differences o Optimize joint position for max muscle force o Reduce
Kinematics, Kinetics, Amputee Gait (part 1)
") Kinematics, Kinetics, Amputee Gait (part 1) MCE 493/593 & ECE 492/592 Prosthesis Design and Control October 16, 2014 Antonie J. (Ton) van den Bogert Mechanical Engineering Cleveland State University 1
Kinematics, Kinetics, Amputee Gait (part 1) MCE 493/593 & ECE 492/592 Prosthesis Design and Control October 16, 2014 Antonie J. (Ton) van den Bogert Mechanical Engineering Cleveland State University 1
Momentum-centric whole-body control and kino-dynamic motion generation for floating-base robots
 Momentum-centric whole-body control and kino-dynamic motion generation for floating-base robots Alexander Herzog The Movement Generation and Control Group (Ludovic Righetti) Conflicting tasks & constraints
Momentum-centric whole-body control and kino-dynamic motion generation for floating-base robots Alexander Herzog The Movement Generation and Control Group (Ludovic Righetti) Conflicting tasks & constraints
» APPLICATIONS OF CONTROL
 » APPLICATIONS OF CONTROL A PID Model of Human Balance Keeping KIMURA HIDENORI and YIFA JIANG The basic requirement of biped (two-legged) motion is apparatus records what we know today as the center of
» APPLICATIONS OF CONTROL A PID Model of Human Balance Keeping KIMURA HIDENORI and YIFA JIANG The basic requirement of biped (two-legged) motion is apparatus records what we know today as the center of
STRAIN ENERGY EXPRESSION AS COST FUNCTION FOR MUSCLE FORCE DISTRIBUTION PROBLEM IN BIOMECHANICS
 International Journal of Civil Engineering and Technology (IJCIET) Volume 8, Issue 5, May 2017, pp. 466 479, Article ID: IJCIET_08_05_054 Available online at http://www.iaeme.com/ijciet/issues.asp?jtype=ijciet&vtype=8&itype=5
International Journal of Civil Engineering and Technology (IJCIET) Volume 8, Issue 5, May 2017, pp. 466 479, Article ID: IJCIET_08_05_054 Available online at http://www.iaeme.com/ijciet/issues.asp?jtype=ijciet&vtype=8&itype=5
Electric Currents and Circuits
 Nicholas J. Giordano www.cengage.com/physics/giordano Chapter 19 Electric Currents and Circuits Marilyn Akins, PhD Broome Community College Electric Circuits The motion of charges leads to the idea of
Nicholas J. Giordano www.cengage.com/physics/giordano Chapter 19 Electric Currents and Circuits Marilyn Akins, PhD Broome Community College Electric Circuits The motion of charges leads to the idea of
Planar Bipedal Robot with Impulsive Foot Action
 Planar Bipedal Robot with Impulsive Foot Action Jun Ho Choi and J. W. Grizzle Abstract A planar bipedal robot with an impulsive actuator at each foot is considered. The analysis extends previous work on
Planar Bipedal Robot with Impulsive Foot Action Jun Ho Choi and J. W. Grizzle Abstract A planar bipedal robot with an impulsive actuator at each foot is considered. The analysis extends previous work on
Modeling of Surface EMG Signals using System Identification Techniques
 Modeling of Surface EMG Signals using System Identification Techniques Vishnu R S PG Scholar, Dept. of Electrical and Electronics Engg. Mar Baselios College of Engineering and Technology Thiruvananthapuram,
Modeling of Surface EMG Signals using System Identification Techniques Vishnu R S PG Scholar, Dept. of Electrical and Electronics Engg. Mar Baselios College of Engineering and Technology Thiruvananthapuram,
C 2 Continuous Gait-Pattern Generation for Biped Robots
 C Continuous Gait-Pattern Generation for Biped Robots Shunsuke Kudoh 1 Taku Komura 1 The University of Tokyo, JAPAN, kudoh@cvl.iis.u-tokyo.ac.jp City University of ong Kong, ong Kong, taku@ieee.org Abstract
C Continuous Gait-Pattern Generation for Biped Robots Shunsuke Kudoh 1 Taku Komura 1 The University of Tokyo, JAPAN, kudoh@cvl.iis.u-tokyo.ac.jp City University of ong Kong, ong Kong, taku@ieee.org Abstract
Coordinating Feet in Bipedal Balance
 Coordinating Feet in Bipedal Balance S.O. Anderson, C.G. Atkeson, J.K. Hodgins Robotics Institute Carnegie Mellon University soa,cga,jkh@ri.cmu.edu Abstract Biomechanical models of human standing balance
Coordinating Feet in Bipedal Balance S.O. Anderson, C.G. Atkeson, J.K. Hodgins Robotics Institute Carnegie Mellon University soa,cga,jkh@ri.cmu.edu Abstract Biomechanical models of human standing balance
Evaluation of a 4-Degree of Freedom Parallel Manipulator Stiffness
 Charles CORRADINI Jean-Christophe FAUROUX IFMA/LaRAMA, Clermont-Ferrand, France Evaluation of a 4-Degree of Freedom Parallel Manipulator Stiffness Laboratoire de Recherches et Applications en Mécanique
Charles CORRADINI Jean-Christophe FAUROUX IFMA/LaRAMA, Clermont-Ferrand, France Evaluation of a 4-Degree of Freedom Parallel Manipulator Stiffness Laboratoire de Recherches et Applications en Mécanique
Dynamics of Heel Strike in Bipedal Systems with Circular Feet
 Dynamics of Heel Strike in Bipedal Systems with Circular Feet Josep Maria Font and József Kövecses Abstract Energetic efficiency is a fundamental subject of research in bipedal robot locomotion. In such
Dynamics of Heel Strike in Bipedal Systems with Circular Feet Josep Maria Font and József Kövecses Abstract Energetic efficiency is a fundamental subject of research in bipedal robot locomotion. In such
Gravity Balancing of a Human Leg using an External Orthosis
 2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 FrB8.3 Gravity Balancing of a Human Leg using an External Orthosis Abbas Fattah, Ph.D., and Sunil K. Agrawal,
2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 FrB8.3 Gravity Balancing of a Human Leg using an External Orthosis Abbas Fattah, Ph.D., and Sunil K. Agrawal,
Practical Applications of Muscle Stimulation
 Practical Applications of Muscle Stimulation William Durfee Department of Mechanical Engineering University of Minnesota Minneapolis, USA www.dmdconf.org 1 NON-INVASIVE ASSESSMENT OF MUSCLE FUNCTION External
Practical Applications of Muscle Stimulation William Durfee Department of Mechanical Engineering University of Minnesota Minneapolis, USA www.dmdconf.org 1 NON-INVASIVE ASSESSMENT OF MUSCLE FUNCTION External
OpenSim. Evaluating an Open Source Simulation Software for Human Movements
 OpenSim Evaluating an Open Source Simulation Software for Human Movements Technical Report Nicolas Schwenck Department of Mechanics Kungliga Tekniska Högskolan Stockholm, July 29 Preface This thesis mainly
OpenSim Evaluating an Open Source Simulation Software for Human Movements Technical Report Nicolas Schwenck Department of Mechanics Kungliga Tekniska Högskolan Stockholm, July 29 Preface This thesis mainly
Data Acquisition. Where am I? Photographs. Video Systems. Not covered in detail he Hamill text, nor in most texts on reserve.
 Data Acquisition Not covered in detail he Hamill text, nor in most texts on reserve. The best text to read if the lecture and slides are not clear to you is: Winter, D. Biomechanics of Human Movement.
Data Acquisition Not covered in detail he Hamill text, nor in most texts on reserve. The best text to read if the lecture and slides are not clear to you is: Winter, D. Biomechanics of Human Movement.
Bio-inspired Legged Locomotion...
 Bio-inspired Legged Locomotion... 2 Torque Control Chapter 5 Torque control in legged locomotion Juanjuan Zhang 1,2, Chien Chern Cheah 2, and Steven H. Collins 1,3 Many torque control approaches have been
Bio-inspired Legged Locomotion... 2 Torque Control Chapter 5 Torque control in legged locomotion Juanjuan Zhang 1,2, Chien Chern Cheah 2, and Steven H. Collins 1,3 Many torque control approaches have been
Inverse differential kinematics Statics and force transformations
 Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
Surface Electromyographic [EMG] Control of a Humanoid Robot Arm. by Edward E. Brown, Jr.
![Surface Electromyographic [EMG] Control of a Humanoid Robot Arm. by Edward E. Brown, Jr.](/thumbs/79/79102606.jpg "Surface Electromyographic [EMG] Control of a Humanoid Robot Arm. by Edward E. Brown, Jr.") Surface Electromyographic [EMG] Control of a Humanoid Robot Arm by Edward E. Brown, Jr. Goal is to extract position and velocity information from semg signals obtained from the biceps and triceps antagonistic
Surface Electromyographic [EMG] Control of a Humanoid Robot Arm by Edward E. Brown, Jr. Goal is to extract position and velocity information from semg signals obtained from the biceps and triceps antagonistic
Effects of Hip and Ankle Moments on Running Stability: Simulation of a Simplified Model
 Purdue University Purdue e-pubs Open Access Theses Theses and Dissertations Fall 214 Effects of Hip and Ankle Moments on Running Stability: Simulation of a Simplified Model Rubin C. Cholera Purdue University
Purdue University Purdue e-pubs Open Access Theses Theses and Dissertations Fall 214 Effects of Hip and Ankle Moments on Running Stability: Simulation of a Simplified Model Rubin C. Cholera Purdue University
The Effect of Semicircular Feet on Energy Dissipation by Heel-strike in Dynamic Biped Locomotion
 7 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 7 FrC3.3 The Effect of Semicircular Feet on Energy Dissipation by Heel-strike in Dynamic Biped Locomotion Fumihiko Asano
7 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 7 FrC3.3 The Effect of Semicircular Feet on Energy Dissipation by Heel-strike in Dynamic Biped Locomotion Fumihiko Asano
Physiological Musculoskeletal Model Identification for the Lower Limbs Control of Paraplegic Under Implanted FES
 Physiological Musculoskeletal Model Identification for the Lower Limbs Control of Paraplegic Under Implanted FES Mourad Benoussaad, David Guiraud, Philippe Poignet To cite this version: Mourad Benoussaad,
Physiological Musculoskeletal Model Identification for the Lower Limbs Control of Paraplegic Under Implanted FES Mourad Benoussaad, David Guiraud, Philippe Poignet To cite this version: Mourad Benoussaad,
SOME ASPECTS OF HEEL STRIKE IMPACT DYNAMICS IN THE STABILITY OF BIPEDAL LOCOMOTION
 SOME ASPECTS OF HEEL STRIKE IMPACT DYNAMICS IN THE STABILITY OF BIPEDAL LOCOMOTION Javier Ros Department of Mechanical Engineering Public University of Navarre Pamplona, 31006, Navarre, Spain E-mail: jros@unavarra.es
SOME ASPECTS OF HEEL STRIKE IMPACT DYNAMICS IN THE STABILITY OF BIPEDAL LOCOMOTION Javier Ros Department of Mechanical Engineering Public University of Navarre Pamplona, 31006, Navarre, Spain E-mail: jros@unavarra.es
High gain observer for embedded Acrobot
 Preprints of the 19th World Congress The International Federation of Automatic Control High gain observer for embedded Acrobot Milan Anderle Sergej Čelikovský Czech Technical University in Prague, Faculty
Preprints of the 19th World Congress The International Federation of Automatic Control High gain observer for embedded Acrobot Milan Anderle Sergej Čelikovský Czech Technical University in Prague, Faculty
of Rigid Segments Global or Laboratory Coordinate System 36 } Research Methods in Biomechanics
 36 } Research Methods in Biomechanics Camera 5 Camera 6 Camera 4 Direction of motion Calibrated 3-D space Camera 1 Camera 3 Computer Camera 2 Figure 2.1 Typical multicamera setup for a 3-D kinematic analysis.
36 } Research Methods in Biomechanics Camera 5 Camera 6 Camera 4 Direction of motion Calibrated 3-D space Camera 1 Camera 3 Computer Camera 2 Figure 2.1 Typical multicamera setup for a 3-D kinematic analysis.
Biped Walking of Passive Dynamic Walker with IPMC Linear Actuator
 Biped Walking of Passive Dynamic Walker with IPMC Linear Actuator N. Kamamichi 1,Y.Kaneda 1, M. Yamakita 1,3,K.Asaka 2,3 and Z. W. Luo 3 1 Tokyo Institute of Technology, 2-12-1 Meguro-ku Oh-okayama Tokyo,
Biped Walking of Passive Dynamic Walker with IPMC Linear Actuator N. Kamamichi 1,Y.Kaneda 1, M. Yamakita 1,3,K.Asaka 2,3 and Z. W. Luo 3 1 Tokyo Institute of Technology, 2-12-1 Meguro-ku Oh-okayama Tokyo,
Game Physics. Game and Media Technology Master Program - Utrecht University. Dr. Nicolas Pronost
 Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Rigid body physics Particle system Most simple instance of a physics system Each object (body) is a particle Each particle
Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Rigid body physics Particle system Most simple instance of a physics system Each object (body) is a particle Each particle
Cumulative Charge Stimulation Technology - Q General Overview
 Cumulative Charge Stimulation Technology - Q General Overview Preface The objective of this document is to outline the basic theory behind the new method of Motor neuron education, termed Q ( Sigma Q ).
Cumulative Charge Stimulation Technology - Q General Overview Preface The objective of this document is to outline the basic theory behind the new method of Motor neuron education, termed Q ( Sigma Q ).
A Higher Order Partial Feedback Linearization Based Method for Controlling an Underactuated Hopping Robot with a Compliant Leg
 A Higher Order Partial Feedback Linearization Based Method for Controlling an Underactuated Hopping Robot with a Compliant Leg Pat Terry and Katie Byl Abstract This paper considers control techniques for
A Higher Order Partial Feedback Linearization Based Method for Controlling an Underactuated Hopping Robot with a Compliant Leg Pat Terry and Katie Byl Abstract This paper considers control techniques for
Towards a Theory of Robot Motor Control. Frank C. Park Robotics Laboratory Seoul National University
 Towards a Theory of Robot Motor Control Frank C. Park Robotics Laboratory Seoul National University [A more honest title] [A more honest title] Optimality in Robot Motion Generation, Control, and Learning:
Towards a Theory of Robot Motor Control Frank C. Park Robotics Laboratory Seoul National University [A more honest title] [A more honest title] Optimality in Robot Motion Generation, Control, and Learning:
Optimal control of a neuromusculoskeletal model: a second order sliding mode solution
 Optimal control of a neuromusculoskeletal model: a second order sliding mode solution Carlos Rengifo, Franck Plestan, Yannick Aoustin To cite this version: Carlos Rengifo, Franck Plestan, Yannick Aoustin.
Optimal control of a neuromusculoskeletal model: a second order sliding mode solution Carlos Rengifo, Franck Plestan, Yannick Aoustin To cite this version: Carlos Rengifo, Franck Plestan, Yannick Aoustin.
Kinematics. Kinetics. Frames of Reference. Role of Kinematic Analysis in Biomechanics. Frames of Reference. Frames of Reference
 Kinematics Kinematics theory Kinematics Mechanics Physics Other areas of physics Processing techniques Statics Dynamics Measurement techniques Introduction to 3D kinematics Kinematics Kinetics Kinematics:
Kinematics Kinematics theory Kinematics Mechanics Physics Other areas of physics Processing techniques Statics Dynamics Measurement techniques Introduction to 3D kinematics Kinematics Kinetics Kinematics:
Electric Currents and Resistance
 Electric Currents and Resistance Physics 2415 Lecture 10 Michael Fowler, UVa Today s Topics First we ll finish capacitors Then current electricity: frogs legs, etc. The lithium ion battery Circuits and
Electric Currents and Resistance Physics 2415 Lecture 10 Michael Fowler, UVa Today s Topics First we ll finish capacitors Then current electricity: frogs legs, etc. The lithium ion battery Circuits and
Given U, V, x and θ perform the following steps: a) Find the rotation angle, φ, by which u 1 is rotated in relation to x 1
 Find the rotation angle, φ, by which u 1 is rotated in relation to x 1") 1 The Jacobian can be expressed in an arbitrary frame, such as the base frame located at the first joint, the hand frame located at the end-effector, or the global frame located somewhere else. The SVD
1 The Jacobian can be expressed in an arbitrary frame, such as the base frame located at the first joint, the hand frame located at the end-effector, or the global frame located somewhere else. The SVD
Reconstructing Null-space Policies Subject to Dynamic Task Constraints in Redundant Manipulators
 Reconstructing Null-space Policies Subject to Dynamic Task Constraints in Redundant Manipulators Matthew Howard Sethu Vijayakumar September, 7 Abstract We consider the problem of direct policy learning
Reconstructing Null-space Policies Subject to Dynamic Task Constraints in Redundant Manipulators Matthew Howard Sethu Vijayakumar September, 7 Abstract We consider the problem of direct policy learning
Lecture 14: Kinesthetic haptic devices: Higher degrees of freedom
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 14: Kinesthetic haptic devices: Higher degrees of freedom Allison M. Okamura Stanford University (This lecture was not given, but the notes
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 14: Kinesthetic haptic devices: Higher degrees of freedom Allison M. Okamura Stanford University (This lecture was not given, but the notes
IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. 14,NO. 3, SEPTEMBER
 IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. 14,NO. 3, SEPTEMBER 26 1 1 2 3 IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. 14,NO. 3, SEPTEMBER 26 2
IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. 14,NO. 3, SEPTEMBER 26 1 1 2 3 IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. 14,NO. 3, SEPTEMBER 26 2
VIDEO-BASED MARKER-LESS TRACKING SYSTEM IN GAIT ANALYSIS Alex Ongl, Ian Harris Sujael
 VIDEO-BASED MARKER-LESS TRACKING SYSTEM IN GAIT ANALYSIS Alex Ongl, Ian Harris Sujael l School of Sports, Health & Leisure, Republic Polytechnic, Singapore An alternative to the 30 motion marker-based
VIDEO-BASED MARKER-LESS TRACKING SYSTEM IN GAIT ANALYSIS Alex Ongl, Ian Harris Sujael l School of Sports, Health & Leisure, Republic Polytechnic, Singapore An alternative to the 30 motion marker-based
Extended Manipulability Measure and Application for Robot Arm Equipped with Bi-articular Driving Mechanism
 Extended Manipulability Measure and Application for Robot Arm Equipped with Bi-articular Driving Mechanism Kengo Yoshida, Naoki Hata, Sehoon Oh, Yoichi Hori Department of Electrical Engineering Oki Electric
Extended Manipulability Measure and Application for Robot Arm Equipped with Bi-articular Driving Mechanism Kengo Yoshida, Naoki Hata, Sehoon Oh, Yoichi Hori Department of Electrical Engineering Oki Electric
DEVELOPMENT OF JUMP ASSIST SYSTEM USING PNEUMATIC RUBBER MUSCLE
 DEVELOPMENT OF JUMP ASSIST SYSTEM USING PNEUMATIC RUBBER MUSCLE Kotaro TADANO*, Hiroshi ARAYA**, Kenji KAWASHIMA*, Chongo YOUN *, Toshiharu KAGAWA* * Precision and Intelligence Laboratory, Tokyo Institute
DEVELOPMENT OF JUMP ASSIST SYSTEM USING PNEUMATIC RUBBER MUSCLE Kotaro TADANO*, Hiroshi ARAYA**, Kenji KAWASHIMA*, Chongo YOUN *, Toshiharu KAGAWA* * Precision and Intelligence Laboratory, Tokyo Institute
Biomechanics Module Notes
 Biomechanics Module Notes Biomechanics: the study of mechanics as it relates to the functional and anatomical analysis of biological systems o Study of movements in both qualitative and quantitative Qualitative:
Biomechanics Module Notes Biomechanics: the study of mechanics as it relates to the functional and anatomical analysis of biological systems o Study of movements in both qualitative and quantitative Qualitative:
[rad] residual error. number of principal componetns. singular value. number of principal components PCA NLPCA 0.
![[rad] residual error. number of principal componetns. singular value. number of principal components PCA NLPCA 0.](/thumbs/94/119318414.jpg "[rad] residual error. number of principal componetns. singular value. number of principal components PCA NLPCA 0.") ( ) ( CREST) Reductive Mapping for Sequential Patterns of Humanoid Body Motion *Koji TATANI, Yoshihiko NAKAMURA. Univ. of Tokyo. 7-3-1, Hongo, Bunkyo-ku, Tokyo Abstract Since a humanoid robot takes the
( ) ( CREST) Reductive Mapping for Sequential Patterns of Humanoid Body Motion *Koji TATANI, Yoshihiko NAKAMURA. Univ. of Tokyo. 7-3-1, Hongo, Bunkyo-ku, Tokyo Abstract Since a humanoid robot takes the
Development of a Hill-Type Muscle Model With Fatigue for the Calculation of the Redundant Muscle Forces using Multibody Dynamics
 Development of a Hill-Type Muscle Model With Fatigue for the Calculation of the Redundant Muscle Forces using Multibody Dynamics André Ferro Pereira Instituto Superior Técnico Universidade Técnica de Lisboa
Development of a Hill-Type Muscle Model With Fatigue for the Calculation of the Redundant Muscle Forces using Multibody Dynamics André Ferro Pereira Instituto Superior Técnico Universidade Técnica de Lisboa
The Inactivation Principle: Mathematical Solutions minimizing the Absolute Work and Biological Implications for the Planning of Arm Movements
 Title The Inactivation Principle: Mathematical Solutions minimizing the Absolute Work and Biological Implications for the Planning of Arm Movements Running Title The Inactivation Principle Authors Bastien
Title The Inactivation Principle: Mathematical Solutions minimizing the Absolute Work and Biological Implications for the Planning of Arm Movements Running Title The Inactivation Principle Authors Bastien
Limit Cycle Walking on Ice
 3 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 3. Tokyo, Japan Limit Cycle Walking on Ice Fumihiko Asano, Yasunori Kikuchi and Masahiro Shibata Abstract This
3 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 3. Tokyo, Japan Limit Cycle Walking on Ice Fumihiko Asano, Yasunori Kikuchi and Masahiro Shibata Abstract This
Individual Control of Redundant Skeletal Muscles using an Exoskeleton Robot
 Individual Control of Redundant Skeletal Muscles using an Exoskeleton Robot Jun Ueda and Ming Ding Abstract Individual muscle control involves the use of an exoskeleton to induce specific muscle activation
Individual Control of Redundant Skeletal Muscles using an Exoskeleton Robot Jun Ueda and Ming Ding Abstract Individual muscle control involves the use of an exoskeleton to induce specific muscle activation
Robotics. Dynamics. University of Stuttgart Winter 2018/19
 Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler, joint space control, reference trajectory following, optimal operational
Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler, joint space control, reference trajectory following, optimal operational
COMPARISON OF METHODS TO DETERMINE GROUND REACTIONS DURING THE DOUBLE SUPPORT PHASE OF GAIT
 Proceedings of MUSME 2011, the International Symposium on Multibody Systems and Mechatronics Valencia, Spain, 25-28 October 2011 COMPARISON OF METHODS TO DETERMINE GROUND REACTIONS DURING THE DOUBLE SUPPORT
Proceedings of MUSME 2011, the International Symposium on Multibody Systems and Mechatronics Valencia, Spain, 25-28 October 2011 COMPARISON OF METHODS TO DETERMINE GROUND REACTIONS DURING THE DOUBLE SUPPORT
Structured variability of muscle activations supports the minimal intervention principle of motor control
 Structured variability of muscle activations supports the minimal intervention principle of motor control Francisco J. Valero-Cuevas 1,2,3,*,, Madhusudhan Venkadesan 3,4,,, 6,, and Emanuel Todorov 1 1
Structured variability of muscle activations supports the minimal intervention principle of motor control Francisco J. Valero-Cuevas 1,2,3,*,, Madhusudhan Venkadesan 3,4,,, 6,, and Emanuel Todorov 1 1
KEY KNOWLEDGE BIOMECHANICAL PRINCIPLES FOR ANALYSIS OF MOVEMENT (PART 1)
") VCE PHYSICAL EDUCATION UNIT 3 AOS 1 KEY KNOWLEDGE 3.1.4 BIOMECHANICAL PRINCIPLES FOR ANALYSIS OF MOVEMENT (PART 1) Presented by Chris Branigan Study design dot point: Biomechanical principles for analysis
VCE PHYSICAL EDUCATION UNIT 3 AOS 1 KEY KNOWLEDGE 3.1.4 BIOMECHANICAL PRINCIPLES FOR ANALYSIS OF MOVEMENT (PART 1) Presented by Chris Branigan Study design dot point: Biomechanical principles for analysis
Exploiting angular momentum to enhance bipedal centerof-mass
 Exploiting angular momentum to enhance bipedal centerof-mass control Citation As Published Publisher Hofmann, A., M. Popovic, and H. Herr. Exploiting angular momentum to enhance bipedal center-of-mass
Exploiting angular momentum to enhance bipedal centerof-mass control Citation As Published Publisher Hofmann, A., M. Popovic, and H. Herr. Exploiting angular momentum to enhance bipedal center-of-mass
Adaptive Control of a Human-Driven Knee Joint Orthosis
 Adaptive Control of a Human-Driven Knee Joint Orthosis Hala Rifaï, Samer Mohammed, Boubaker Daachi and Yacine Amirat Abstract The paper concerns the control of a lower limb orthosis acting on the knee
Adaptive Control of a Human-Driven Knee Joint Orthosis Hala Rifaï, Samer Mohammed, Boubaker Daachi and Yacine Amirat Abstract The paper concerns the control of a lower limb orthosis acting on the knee
Modeling Verticality Estimation During Locomotion
 Proceedings of the 19th CISM-IFToMM Symposium on Robot Design, Dynamics, and Control, Romansy 212. pp. 651-656 Modeling Verticality Estimation During Locomotion Ildar Farkhatdinov 1 Hannah Michalska 2
Proceedings of the 19th CISM-IFToMM Symposium on Robot Design, Dynamics, and Control, Romansy 212. pp. 651-656 Modeling Verticality Estimation During Locomotion Ildar Farkhatdinov 1 Hannah Michalska 2
Predictive dynamics: an optimization-based novel approach for human motion simulation
 Struct Multidisc Optim DOI 1.17/s158-9-423-z BIOMECHANICAL APPLICATION Predictive dynamics: an optimization-based novel approach for human motion simulation Yujiang Xiang Hyun-JoonChung Joo H. Kim Rajankumar
Struct Multidisc Optim DOI 1.17/s158-9-423-z BIOMECHANICAL APPLICATION Predictive dynamics: an optimization-based novel approach for human motion simulation Yujiang Xiang Hyun-JoonChung Joo H. Kim Rajankumar
Humanoid Push Recovery
 Humanoid Push Recovery Benjamin Stephens The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213, USA bstephens@cmu.edu http://www.cs.cmu.edu/ bstephe1 Abstract We extend simple models previously
Humanoid Push Recovery Benjamin Stephens The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213, USA bstephens@cmu.edu http://www.cs.cmu.edu/ bstephe1 Abstract We extend simple models previously
Compliant Control of Multi-Contact and Center of Mass Behaviors in Humanoid Robots
 Compliant Control of Multi-Contact and Center of Mass Behaviors in Humanoid Robots Luis Sentis, Member, IEEE, Jaeheung Park, Member, IEEE, and Oussama Khatib, Fellow, IEEE Abstract This paper presents
Compliant Control of Multi-Contact and Center of Mass Behaviors in Humanoid Robots Luis Sentis, Member, IEEE, Jaeheung Park, Member, IEEE, and Oussama Khatib, Fellow, IEEE Abstract This paper presents
Continuous flow of electric charges. Current Electricity
 Continuous flow of electric charges Current Electricity Did You Know? The voltage across a muscle cell in your body is about 70 millivolts. A millivolt (mv) is one thousandth of a volt. AC and DC DC Direct
Continuous flow of electric charges Current Electricity Did You Know? The voltage across a muscle cell in your body is about 70 millivolts. A millivolt (mv) is one thousandth of a volt. AC and DC DC Direct
Integral admittance shaping: A unified framework for active exoskeleton control. Umashankar Nagarajan, Gabriel Aguirre-Ollinger, Ambarish Goswami
 Accepted Manuscript Integral admittance shaping: A unified framework for active exoskeleton control Umashankar Nagarajan, Gabriel Aguirre-Ollinger, Ambarish Goswami PII: S9-889(5)3- DOI: http://dx.doi.org/.6/j.robot.5.9.5
Accepted Manuscript Integral admittance shaping: A unified framework for active exoskeleton control Umashankar Nagarajan, Gabriel Aguirre-Ollinger, Ambarish Goswami PII: S9-889(5)3- DOI: http://dx.doi.org/.6/j.robot.5.9.5
Dynamic Reconfiguration Manipulability Analyses of Redundant Robot and Humanoid Walking
 Dynamic Reconfiguration Manipulability Analyses of Redundant Robot and Humanoid Walking Yosuke Kobayashi, Mamoru Minami, Akira Yanou and Tomohide Maeba Abstract In this paper, we propose a new index of
Dynamic Reconfiguration Manipulability Analyses of Redundant Robot and Humanoid Walking Yosuke Kobayashi, Mamoru Minami, Akira Yanou and Tomohide Maeba Abstract In this paper, we propose a new index of
Introduction to Biomedical Engineering
 Introduction to Biomedical Engineering Biosignal processing Kung-Bin Sung 6/11/2007 1 Outline Chapter 10: Biosignal processing Characteristics of biosignals Frequency domain representation and analysis
Introduction to Biomedical Engineering Biosignal processing Kung-Bin Sung 6/11/2007 1 Outline Chapter 10: Biosignal processing Characteristics of biosignals Frequency domain representation and analysis
Comparison of knee biomechanics during isokinetic flexion-extension. or fitness exercises by means of experimental. and musculoskeletal simulations
 UNIVERSITA DEGLI STUDI DI PADOVA Dipartimento di Ingegneria Industriale DII Corso di Laurea Magistrale in Ingegneria Meccanica Anno accademico 2014/2015 Comparison of knee biomechanics during isokinetic
UNIVERSITA DEGLI STUDI DI PADOVA Dipartimento di Ingegneria Industriale DII Corso di Laurea Magistrale in Ingegneria Meccanica Anno accademico 2014/2015 Comparison of knee biomechanics during isokinetic
SOLVING DYNAMICS OF QUIET STANDING AS NONLINEAR POLYNOMIAL SYSTEMS
 SOLVING DYNAMICS OF QUIET STANDING AS NONLINEAR POLYNOMIAL SYSTEMS Zhiming Ji Department of Mechanical Engineering, New Jersey Institute of Technology, Newark, New Jersey 070 ji@njit.edu Abstract Many
SOLVING DYNAMICS OF QUIET STANDING AS NONLINEAR POLYNOMIAL SYSTEMS Zhiming Ji Department of Mechanical Engineering, New Jersey Institute of Technology, Newark, New Jersey 070 ji@njit.edu Abstract Many
Structure of Biological Materials
 ELEC ENG 3BA3: Structure of Biological Materials Notes for Lecture #7 Monday, September 24, 2012 3.2 Muscle biomechanics Organization: skeletal muscle is made up of muscle fibers each fiber is a single
ELEC ENG 3BA3: Structure of Biological Materials Notes for Lecture #7 Monday, September 24, 2012 3.2 Muscle biomechanics Organization: skeletal muscle is made up of muscle fibers each fiber is a single
Prediction of Muscle Activation Patterns During Postural Perturbations Using a Feedback Control Model. Daniel Bruce Lockhart
 Prediction of Muscle Activation Patterns During Postural Perturbations Using a Feedback Control Model A Thesis Presented to The Academic Faculty by Daniel Bruce Lockhart In Partial Fulfillment of the Requirements
Prediction of Muscle Activation Patterns During Postural Perturbations Using a Feedback Control Model A Thesis Presented to The Academic Faculty by Daniel Bruce Lockhart In Partial Fulfillment of the Requirements
Novel Reaction Force Control Design Based on Biarticular Driving System Using Intrinsic Viscoelasticity of Muscle
 Novel Reaction Force Control Design Based on Biarticular Driving System Using Intrinsic Viscoelasticity of Muscle Yasuto Kimura #, Sehoon Oh 2 and Yoichi Hori #3 # Department of Advanced Energy, The University
Novel Reaction Force Control Design Based on Biarticular Driving System Using Intrinsic Viscoelasticity of Muscle Yasuto Kimura #, Sehoon Oh 2 and Yoichi Hori #3 # Department of Advanced Energy, The University
BIOMECHANICAL STUDY AND ANALYSIS ON HUMAN MOTION USING PIEZOELECTRIC SENSOR FOR SCAVENGING ENERGY
 Jurnal Mekanikal December 2010, No. 30, 30-45 BIOMECHANICAL STUDY AND ANALYSIS ON HUMAN MOTION USING PIEZOELECTRIC SENSOR FOR SCAVENGING ENERGY Nurul Ataillah Abdul Rahim and Robiah Ahmad * Faculty of
Jurnal Mekanikal December 2010, No. 30, 30-45 BIOMECHANICAL STUDY AND ANALYSIS ON HUMAN MOTION USING PIEZOELECTRIC SENSOR FOR SCAVENGING ENERGY Nurul Ataillah Abdul Rahim and Robiah Ahmad * Faculty of
NUMERICAL ACCURACY OF TWO BENCHMARK MODELS OF WALKING: THE RIMLESS SPOKED WHEEL AND THE SIMPLEST WALKER
 Dynamics of Continuous, Discrete and Impulsive Systems Series B: Applications & Algorithms 21 (2014) 137-148 Copyright c 2014 Watam Press NUMERICAL ACCURACY OF TWO BENCHMARK MODELS OF WALKING: THE RIMLESS
Dynamics of Continuous, Discrete and Impulsive Systems Series B: Applications & Algorithms 21 (2014) 137-148 Copyright c 2014 Watam Press NUMERICAL ACCURACY OF TWO BENCHMARK MODELS OF WALKING: THE RIMLESS
Switching and PI Control of Walking Motions of Planar Biped Walkers
 SUBMITTED TO IEEE TRANS. ON AUTOMATIC CONTROL - TECHNICAL NOTE, APRIL 2002 1 Switching and PI Control of Walking Motions of Planar Biped Walkers E.R. Westervelt, J.W. Grizzle +, and C. Canudas de Wit Abstract
SUBMITTED TO IEEE TRANS. ON AUTOMATIC CONTROL - TECHNICAL NOTE, APRIL 2002 1 Switching and PI Control of Walking Motions of Planar Biped Walkers E.R. Westervelt, J.W. Grizzle +, and C. Canudas de Wit Abstract
Multi-Priority Cartesian Impedance Control
 Multi-Priority Cartesian Impedance Control Robert Platt Jr. Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology rplatt@csail.mit.edu Muhammad Abdallah, Charles
Multi-Priority Cartesian Impedance Control Robert Platt Jr. Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology rplatt@csail.mit.edu Muhammad Abdallah, Charles
Operational Space Control of Constrained and Underactuated Systems
 Robotics: Science and Systems 2 Los Angeles, CA, USA, June 27-3, 2 Operational Space Control of Constrained and Underactuated Systems Michael Mistry Disney Research Pittsburgh 472 Forbes Ave., Suite Pittsburgh,
Robotics: Science and Systems 2 Los Angeles, CA, USA, June 27-3, 2 Operational Space Control of Constrained and Underactuated Systems Michael Mistry Disney Research Pittsburgh 472 Forbes Ave., Suite Pittsburgh,
MECHANICAL IMPEDANCE OF ANKLE AS A FUNCTION OF ELECTROMYOGRAPHY SIGNALS OF LOWER LEG MUSCLES USING ARTIFICIAL NEURAL NETWORK
 Michigan Technological University Digital Commons @ Michigan Tech Dissertations, Master's Theses and Master's Reports - Open Dissertations, Master's Theses and Master's Reports 2015 MECHANICAL IMPEDANCE
Michigan Technological University Digital Commons @ Michigan Tech Dissertations, Master's Theses and Master's Reports - Open Dissertations, Master's Theses and Master's Reports 2015 MECHANICAL IMPEDANCE
Personal Navigation Using a Kinetic Model of Human Gait
 Personal Navigation Using a Kinetic Model of Human Gait a thesis submitted to the faculty of the graduate school of the university of minnesota by Christopher J. Matthews in partial fulfillment of the
Personal Navigation Using a Kinetic Model of Human Gait a thesis submitted to the faculty of the graduate school of the university of minnesota by Christopher J. Matthews in partial fulfillment of the
Electric Current. Volta
 Electric Current Galvani Volta In the late 1700's Luigi Galvani and Alessandro Volta carried out experiements dealing with the contraction of frogs' leg muscles. Volta's work led to the invention of the
Electric Current Galvani Volta In the late 1700's Luigi Galvani and Alessandro Volta carried out experiements dealing with the contraction of frogs' leg muscles. Volta's work led to the invention of the
Predictive Modulation of Muscle Coordination Pattern Magnitude Scales Fingertip Force Magnitude Over the Voluntary Range
 Predictive Modulation of Muscle Coordination Pattern Magnitude Scales Fingertip Force Magnitude Over the Voluntary Range FRANCISCO J. VALERO-CUEVAS Rehabilitation Research and Development Center, Veterans
Predictive Modulation of Muscle Coordination Pattern Magnitude Scales Fingertip Force Magnitude Over the Voluntary Range FRANCISCO J. VALERO-CUEVAS Rehabilitation Research and Development Center, Veterans