Biomechanical Modelling of Musculoskeletal Systems
|
|
|
- Sheila Watkins
- 5 years ago
- Views:
Transcription
1 Biomechanical Modelling of Musculoskeletal Systems Lecture 6 Presented by Phillip Tran AMME4981/9981 Semester 1, 2016 The University of Sydney Slide 1
2 The Musculoskeletal System The University of Sydney Slide 2

3 The Musculoskeletal System Skeletal System Provides support, structure, and protection Muscular System Provides movement Made up of: Bones Ligaments Cartilage Joints Made up of: Muscles Tendons The University of Sydney Slide 3

4 Bones Cortical/Compact bone Hard, dense bone Cancellous/Spongy bone Trabeculae align along lines of stress Contains red marrow in spaces Medullary Cavity Contains yellow marrow The University of Sydney Slide 4

5 Synovial Joints Articular Cartilage Act as spongy cushions to absorb compressive forces Joint Cavity Space that contains synovial fluid Articular Capsule Synovial membrane secretes synovial fluid Fibrous layer holds the joint together Synovial Fluid Reduces friction between cartilage Ligaments Reinforce the entire structure The University of Sydney Slide 5
6 Tendons and Ligaments Tendons Dense connective tissue that attach muscles to bones Made up of collagen fibres that are aligned along the length of the tendon Transfers pulling force of the muscle to the attached bone Ligaments Connect one bone to another Provides stabilisation The University of Sydney Slide 6

7 Skeletal Muscles Muscle Contraction Concentric: muscle shortens Isometric: no change in length Eccentric: muscle extends Force of Muscle Contraction Number of muscle fibres recruited Size of fibres Frequency of stimulation Degree of muscle stretch The University of Sydney Slide 7
 Sagittal (left/right) Transverse (top/bottom) The University of Sydney Slide")
8 Anatomical Position and Planes Anatomical Position Arms at side with palms facing forward Legs straight and together with feet flat on the ground Movements of the body are described in relation to this position Anatomical Planes Coronal (front/back) Sagittal (left/right) Transverse (top/bottom) The University of Sydney Slide 8

9 Anatomical Directions The University of Sydney Slide 9


10 Movement Flexion/Extension Abduction/Adduction The University of Sydney Slide 10


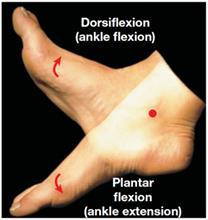
11 Movement Rotation Supination/Pronation Dorsi/Plantarflexion The University of Sydney Slide 11
12 Biomechanical Modelling The University of Sydney Slide 12

13 Solving a Mechanical Problem Forces are applied to a body Geometry is known Finding the internal stresses y 1m A F=1000N Finding the resultant motion E=210GPa, v=0.33 x 1m 5 m F=1000N 0.1m The University of Sydney Slide 13
14 Solving a Mechanical Problem Forces (known) Motion (unknown) F F = ma = m r r Known Forces Equations of Motion Double Integration Displacement The University of Sydney Slide 14

15 Solving a Biomechanical Problem Internal Forces Active muscles Reactions at joints Reactions at ligaments External Forces Inertial forces due to acceleration of a segment Load applied directly to a body segment Internal force External force The University of Sydney Slide 15
16 Solving a Biomechanical Problem External Forces (known) Motion (known) Internal Forces (unknown) r Known Displacement d 2 dt 2 F = ma = m r Double Differentiation Equations of Motion F Forces The University of Sydney Slide 16
17 Direct/Inverse Problems Direct Problems (Mechanical) Using known forces to determine movement Requires accurate measurements of the geometry Requires knowledge of external forces Inverse Problems (Biomechanical) Using known movements to determine the internal forces: Requires full description of the movement (displacement, velocity, acceleration) Requires accurate measurements of anthropometry (measurement of the human body) Requires knowledge of external forces The University of Sydney Slide 17

18 Movement: Trajectories of Motion The University of Sydney Slide 18

19 Movement: Motion Tracking The University of Sydney Slide 19

20 Movement: Motion Tracking The University of Sydney Slide 20
21 Movement: Motion Tracking in Movies Andy Serkis in movies The University of Sydney Slide 21
22 Measuring Movement Angles Calculated using the position of two markers placed along the long axis of the body segment φ ij = tan 1 y j y i x j x i Linear velocities and accelerations Calculated using the position of one marker on two frames Angular velocities and accelerations v xi = x i+1 x i 1, a 2Δt xi = v x(i+1) v x(i 1) 2Δt Calculated using the angle of a body segment on two frames ω i = φ (i+1) φ (i 1), α 2Δt i = ω (i+1) ω (i 1) 2Δt The University of Sydney Slide 22
23 Types of Motion Translation All particles of the body move in parallel trajectories Rotation All particles of the body move about a point General Motion The body performs translation and rotation ΣF x = m a x ΣF y = m a y ΣM G = 0 ΣF n = m a n = mω 2 r G ΣF t = m a t = mαr G ΣM O = I O α ΣF x = m a x ΣF y = m a y ΣM G = I G The University of Sydney Slide 23
24 Anthropometry Measurement of the human body Segment length Segment mass Position of centre of gravity Density The University of Sydney Slide 24
25 Anthropometry Body Segment Length (% of height) Distance of centre of mass from distal joint (% of limb) Head Neck Thorax+Abdomen Upper Arm Forearm Hand Pelvis Thigh Shank Foot Mass (% of body mass) The University of Sydney Slide 25
26 Anthropometry Body Segment Density (g/cm 3 ) Mass moment at centre of mass per segment length (km m 2 /m) Head 1.11 Neck 1.11 Thorax+Abdomen Upper Arm Forearm Hand Pelvis Thigh Shank Foot The University of Sydney Slide 26
27 External Forces Gravitational Forces Acting downward through the centre of mass of each segment Ground Reaction Forces Distributed over an area Assumed to be acting as a single force at the centre of pressure Externally Applied Forces Restraining or accelerating force that acts outside the body Mass being lifted The University of Sydney Slide 27
28 Biomechanical Modelling: Body Segments Body segments can be modelled as rigid bodies Free body diagrams can be drawn for each segment Forces and moments acting at joint centres Gravitational forces acting at the centres of mass Accurate measurements are needed of: Segment masses (m) Location of centres of mass Location of joint centres Mass moment of inertia (I) The University of Sydney Slide 28
29 Biomechanical Modelling: Assumptions Rigid body motion (deformation is small relative to overall motion) Body segments interconnected at joints Length of each body segment remains constant Each body segment has a fixed mass located at its centre of mass The location of each body segment s centre of mass is fixed Joints are considered to be hinge (2D) or ball and socket (3D) The moment of inertia of each body segment about any point is constant during any movement The University of Sydney Slide 29

30 Case Study Cycling The University of Sydney Slide 30

31 Cycling The University of Sydney Slide 31
32 Modelling Process Mathematical model based on trigonometry Position coordinates for the joints Differentiation to compute linear velocities and accelerations Forces and moments calculated at the joints Compute power Aim: To determine if ankling will improve performance The University of Sydney Slide 32
33 Angle Angle of the Ankle Crank Angle Normal Ankling The University of Sydney Slide 33
34 Comparison Normal Cycling Ankling The University of Sydney Slide 34
35 Free Body Diagrams The University of Sydney Slide 35
36 Force (N) Force on the Pedal (Tangential) Normal Ankling Crank Angle The University of Sydney Slide 36

37 Validation: KAvideo to Calculate Hip Forces The University of Sydney Slide 37
38 Resultant Force (N) Validation: KAvideo to Calculate Hip Forces Percentage of Cycle (%) Calculation from exsiting data Model Results The University of Sydney Slide 38
39 Torque (Nm) Validation: Torque at the Ankle Literature Model Crank Angle in degrees The University of Sydney Slide 39
40 Examples The University of Sydney Slide 40
41 Arm Analysis: Part 1 A flexed arm is holding a ball of W b =20 N with a distance of 35 cm to the elbow centre. What is the force required in the biceps (B) if the forearm weighs W a =15 N and the centre of mass for the forearm is 15 cm from the elbow centre of rotation? Also find the reaction force at the elbow joint. Assume the forearm is in the horizontal position and the angle between the forearm and upper arm at the elbow is 100 degrees. The biceps tendon is inserted 3 cm from the elbow centre of the forearm, and at the proximal end of the upper arm, which is 30 cm in length. The University of Sydney Slide 41
42 Arm Analysis: Part 1 Free Body Diagram Using trig formulae: θ = 74.5 The University of Sydney Slide 42
43 Arm Analysis: Part 1 Arm is in static equilibrium ΣF = 0 and ΣM = 0 Scalar equations ΣF x = 0 R x B cos 74.5 = 0 ΣF y = 0 R y + B sin = 0 ΣM = (B sin 74.5 ) = 0 Solve the equations B = N R y = N R x = 85.51N The University of Sydney Slide 43

44 Arm Analysis: Part 2 The ball is lifted from the horizontal forearm position with an angular acceleration of α=2rad/s 2. Determine the additional force required by the bicep to provide this movement. The radius of the forearm is 4cm. Assume that the upper arm remains stationary. The University of Sydney Slide 44
45 Arm Analysis: Part 2 Arm is rotating about the elbow ΣF n = mω 2 r G, ΣF t = mαr G and ΣM = I O α Mass moment of inertia I O = I G + md 2 = 1 12 m 3r2 + L 2 + md 2 = 0.05 Scalar equation ΣM = I O α B sin 74.5 = Solve the equation B = N ΔB = 34.59N The University of Sydney Slide 45
46 Summary The skeletal and muscular systems work together to provide movement for the human body The body can be modelled biomechanically Inverse method to derive the internal muscle forces and joint reactions Movement Anthropometry External forces The University of Sydney Slide 46

47 Joint Reaction Analysis A person stands statically on one foot. The ground reaction force R acts 4cm anterior to the ankle centre of rotation. The body mass is 60kg and the foot mass is 0.9kg. The centre of mass of the foot is 6cm from the centre of rotation. Determine the forces and moment in the ankle. Rotation Centre A y M A A x Mass Centre R x mg R y The University of Sydney Slide 47
48 Joint Reaction Analysis Foot is in static equilibrium ΣF = 0 and ΣM = 0 Reaction force R x = 0 and R y = = 588N Solving ΣF x = ma x R x + A x = 0 A x = 0 ΣF y = ma y A y + R y mg = 0 A y = mg R y = = 579.2N ΣM = 0 M A + R y = 0 M A = 23Nm The University of Sydney Slide 48
49 Joint Reaction Analysis A person exercises his left shoulder rotators. Calculate the forces and moments exerted on his shoulder. F = 200 N a = 25 cm b = 30 cm R j y a b M j z A F a C b B x The University of Sydney Slide 49
50 Joint Reaction Analysis Consider a quasi-equilibrium Equations of motion Force ΣF x = 0 R jx = 0 ΣF y = 0 R jy + F = 0 R jy = F ΣF z = 0 R jz = 0 R j = Fj Moment ΣM A = 0 M j + r c F = 0 But: r c = ai + bk and F = Fj M j = r c F = bfi afk The University of Sydney Slide 50
51 Muscle Analysis A weight lifter raises a barbell to his chest. Determine the torque developed by the back and the hip extensor muscles (M j ) when the barbell is about knee height. Weight of barbell, W b = 1003N Mass of upper body, m u = 53.5kg a = 38cm, b = 32cm, d = 64cm I G = 7.43 kg m 2, α = 8.7 rad/s 2 W b G d y F j a Gx = 0.2 m/s 2, a Gy = -0.1 m/s 2 m u g 60 O b a M j x The University of Sydney Slide 51
52 Muscle Analysis Dynamic equilibrium of forces ΣF x = ma Gx F jx = = 10.7N ΣF y = ma Gy F jy m u g W b = F jy = = N F j = F jx 2 + F jy 2 = N Mass moment of inertia about O I O = I G + md 2 = = 29.34kg m 2 Dynamic equilibrium of moments ΣM O = I O α M j + m u g W b 0.38 = M j = = Nm The University of Sydney Slide 52
Models and Anthropometry
 Learning Objectives Models and Anthropometry Readings: some of Chapter 8 [in text] some of Chapter 11 [in text] By the end of this lecture, you should be able to: Describe common anthropometric measurements
Learning Objectives Models and Anthropometry Readings: some of Chapter 8 [in text] some of Chapter 11 [in text] By the end of this lecture, you should be able to: Describe common anthropometric measurements
τ = F d Angular Kinetics Components of Torque (review from Systems FBD lecture Muscles Create Torques Torque is a Vector Work versus Torque
 Components of Torque (review from Systems FBD lecture Angular Kinetics Hamill & Knutzen (Ch 11) Hay (Ch. 6), Hay & Ried (Ch. 12), Kreighbaum & Barthels (Module I & J) or Hall (Ch. 13 & 14) axis of rotation
Components of Torque (review from Systems FBD lecture Angular Kinetics Hamill & Knutzen (Ch 11) Hay (Ch. 6), Hay & Ried (Ch. 12), Kreighbaum & Barthels (Module I & J) or Hall (Ch. 13 & 14) axis of rotation
Exam 1--PHYS 151--Chapter 1
 ame: Class: Date: Exam 1--PHYS 151--Chapter 1 True/False Indicate whether the statement is true or false. Select A for True and B for False. 1. The force is a measure of an object s inertia. 2. Newton
ame: Class: Date: Exam 1--PHYS 151--Chapter 1 True/False Indicate whether the statement is true or false. Select A for True and B for False. 1. The force is a measure of an object s inertia. 2. Newton
Section 6: 6: Kinematics Kinematics 6-1
 6-1 Section 6: Kinematics Biomechanics - angular kinematics Same as linear kinematics, but There is one vector along the moment arm. There is one vector perpendicular to the moment arm. MA F RMA F RD F
6-1 Section 6: Kinematics Biomechanics - angular kinematics Same as linear kinematics, but There is one vector along the moment arm. There is one vector perpendicular to the moment arm. MA F RMA F RD F
Basic Biomechanics II DEA 325/651 Professor Alan Hedge
 Basic Biomechanics II DEA 325/651 Professor Alan Hedge Definitions! Scalar quantity quantity with magnitude only (e.g. length, weight)! Vector quantity quantity with magnitude + direction (e.g. lifting
Basic Biomechanics II DEA 325/651 Professor Alan Hedge Definitions! Scalar quantity quantity with magnitude only (e.g. length, weight)! Vector quantity quantity with magnitude + direction (e.g. lifting
Simple Biomechanical Models. Introduction to Static Equilibrium F F. Components of Torque. Muscles Create Torques. Torque is a Vector
 Simple Biomechanical Models Introduction to Static Equilibrium Components of Torque axis of rotation (fulcrum) force (not directed through axis of rotation) force (moment) arm T = F x d force arm Muscles
Simple Biomechanical Models Introduction to Static Equilibrium Components of Torque axis of rotation (fulcrum) force (not directed through axis of rotation) force (moment) arm T = F x d force arm Muscles
Lab #7 - Joint Kinetics and Internal Forces
 Purpose: Lab #7 - Joint Kinetics and Internal Forces The objective of this lab is to understand how to calculate net joint forces (NJFs) and net joint moments (NJMs) from force data. Upon completion of
Purpose: Lab #7 - Joint Kinetics and Internal Forces The objective of this lab is to understand how to calculate net joint forces (NJFs) and net joint moments (NJMs) from force data. Upon completion of
Angular Motion Maximum Hand, Foot, or Equipment Linear Speed
 Motion Maximum Hand, Foot, or Equipment Linear Speed Biomechanical Model: Mo3on Maximum Hand, Foot, or Equipment Linear Speed Hand, Foot, or Equipment Linear Speed Sum of Joint Linear Speeds Principle
Motion Maximum Hand, Foot, or Equipment Linear Speed Biomechanical Model: Mo3on Maximum Hand, Foot, or Equipment Linear Speed Hand, Foot, or Equipment Linear Speed Sum of Joint Linear Speeds Principle
BIOMECHANICS AND MOTOR CONTROL OF HUMAN MOVEMENT
 BIOMECHANICS AND MOTOR CONTROL OF HUMAN MOVEMENT Third Edition DAVID Α. WINTER University of Waterloo Waterloo, Ontario, Canada WILEY JOHN WILEY & SONS, INC. CONTENTS Preface to the Third Edition xv 1
BIOMECHANICS AND MOTOR CONTROL OF HUMAN MOVEMENT Third Edition DAVID Α. WINTER University of Waterloo Waterloo, Ontario, Canada WILEY JOHN WILEY & SONS, INC. CONTENTS Preface to the Third Edition xv 1
Sports biomechanics explores the relationship between the body motion, internal forces and external forces to optimize the sport performance.
 What is biomechanics? Biomechanics is the field of study that makes use of the laws of physics and engineering concepts to describe motion of body segments, and the internal and external forces, which
What is biomechanics? Biomechanics is the field of study that makes use of the laws of physics and engineering concepts to describe motion of body segments, and the internal and external forces, which
PART I ORTHOPAEDIC BIOMATERIALS AND THEIR PROPERTIES
 PT I OTHOPEDIC BIOMTEILS ND THEI POPETIES cetabular Cup: Polyethylene (polymer) emoral Head: Ceramic Bone Cement: Polymer emoral Stem: Metal emur: Composite emur + Stem: Composite Just as there are three
PT I OTHOPEDIC BIOMTEILS ND THEI POPETIES cetabular Cup: Polyethylene (polymer) emoral Head: Ceramic Bone Cement: Polymer emoral Stem: Metal emur: Composite emur + Stem: Composite Just as there are three
Biomechanics Module Notes
 Biomechanics Module Notes Biomechanics: the study of mechanics as it relates to the functional and anatomical analysis of biological systems o Study of movements in both qualitative and quantitative Qualitative:
Biomechanics Module Notes Biomechanics: the study of mechanics as it relates to the functional and anatomical analysis of biological systems o Study of movements in both qualitative and quantitative Qualitative:
The main force acting on the body is the gravitational force!
 The main force acting on the body is the gravitational force! (W= weight!) W = m g Stability of the body against the gravitational force is maintained by the bone structure of the skeleton! Gravitational
The main force acting on the body is the gravitational force! (W= weight!) W = m g Stability of the body against the gravitational force is maintained by the bone structure of the skeleton! Gravitational
ANGULAR KINETICS (Part 1 Statics) Readings: McGinnis (2005), Chapter 5.
 Readings: McGinnis (2005), Chapter 5.") NGUL KINTICS (Part 1 Statics) eadings: McGinnis (2005), Chapter 5. 1 Moment of Force or Torque: What causes a change in the state of linear motion of an object? Net force ( F = ma) What causes a change
NGUL KINTICS (Part 1 Statics) eadings: McGinnis (2005), Chapter 5. 1 Moment of Force or Torque: What causes a change in the state of linear motion of an object? Net force ( F = ma) What causes a change
Skeletal 2 - joints. Puzzle 1 bones
 Puzzle 1 bones Listed below are the names of some of the bones that make up your skeletal system. But the names have been encrypted using a secret code. Can you decipher this code to find out what they
Puzzle 1 bones Listed below are the names of some of the bones that make up your skeletal system. But the names have been encrypted using a secret code. Can you decipher this code to find out what they
MODELING SINGLE LINK MOTION AND MUSCLE BEHAVIOR WITH A MODIFIED PENDULUM EQUATION
 MODELING SINGLE LINK MOTION AND MUSCLE BEHAVIOR WITH A MODIFIED PENDULUM EQUATION By ALLISON SUTHERLIN A SENIOR RESEARCH PAPER PRESENTED TO THE DEPARTMENT OF MATHEMATICS AND COMPUTER SCIENCE OF STETSON
MODELING SINGLE LINK MOTION AND MUSCLE BEHAVIOR WITH A MODIFIED PENDULUM EQUATION By ALLISON SUTHERLIN A SENIOR RESEARCH PAPER PRESENTED TO THE DEPARTMENT OF MATHEMATICS AND COMPUTER SCIENCE OF STETSON
Angular Kinetics. Learning Objectives: Learning Objectives: Properties of Torques (review from Models and Anthropometry) T = F d
 T = F d") Angular Kinetics Readings: Chapter 11 [course text] Hay, Chapter 6 [on reserve] Hall, Chapter 13 & 14 [on reserve] Kreighbaum & Barthels, Modules I & J [on reserve] 1 Learning Objectives: By the end of
Angular Kinetics Readings: Chapter 11 [course text] Hay, Chapter 6 [on reserve] Hall, Chapter 13 & 14 [on reserve] Kreighbaum & Barthels, Modules I & J [on reserve] 1 Learning Objectives: By the end of
Chapter 9 TORQUE & Rotational Kinematics
 Chapter 9 TORQUE & Rotational Kinematics This motionless person is in static equilibrium. The forces acting on him add up to zero. Both forces are vertical in this case. This car is in dynamic equilibrium
Chapter 9 TORQUE & Rotational Kinematics This motionless person is in static equilibrium. The forces acting on him add up to zero. Both forces are vertical in this case. This car is in dynamic equilibrium
Static equilibrium. Biomechanics 2 Static Equilibrium. Free-Body diagram Internal forces of structures. Last week: Forces and Moments
 Static equilibrium Biomechanics 2 Static Equilibrium Free-Body diagram Internal forces of structures Last week: Forces and Moments Force F: tends to change state of rest or motion Moment M: force acting
Static equilibrium Biomechanics 2 Static Equilibrium Free-Body diagram Internal forces of structures Last week: Forces and Moments Force F: tends to change state of rest or motion Moment M: force acting
Rotational Dynamics continued
 Chapter 9 Rotational Dynamics continued 9.1 The Action of Forces and Torques on Rigid Objects Chapter 8 developed the concepts of angular motion. θ : angles and radian measure for angular variables ω :
Chapter 9 Rotational Dynamics continued 9.1 The Action of Forces and Torques on Rigid Objects Chapter 8 developed the concepts of angular motion. θ : angles and radian measure for angular variables ω :
Torque and Static Equilibrium
 Torque and Static Equilibrium Rigid Bodies Rigid body: An extended object in which the distance between any two points in the object is constant in time. Examples: sphere, disk Effect of external forces
Torque and Static Equilibrium Rigid Bodies Rigid body: An extended object in which the distance between any two points in the object is constant in time. Examples: sphere, disk Effect of external forces
Chapter 12 Static Equilibrium
 Chapter Static Equilibrium. Analysis Model: Rigid Body in Equilibrium. More on the Center of Gravity. Examples of Rigid Objects in Static Equilibrium CHAPTER : STATIC EQUILIBRIUM AND ELASTICITY.) The Conditions
Chapter Static Equilibrium. Analysis Model: Rigid Body in Equilibrium. More on the Center of Gravity. Examples of Rigid Objects in Static Equilibrium CHAPTER : STATIC EQUILIBRIUM AND ELASTICITY.) The Conditions
Biomechanics+Exam+3+Review+
 Biomechanics+Exam+3+Review+ Chapter(13(+(Equilibrium(and(Human(Movement( Center(of(Gravity((CG)(or(Center(of(Mass( The point around which the mass and weight of a body are balanced in all direction or
Biomechanics+Exam+3+Review+ Chapter(13(+(Equilibrium(and(Human(Movement( Center(of(Gravity((CG)(or(Center(of(Mass( The point around which the mass and weight of a body are balanced in all direction or
UNIVERSITY PHYSICS I. Professor Meade Brooks, Collin College. Chapter 12: STATIC EQUILIBRIUM AND ELASTICITY
 UNIVERSITY PHYSICS I Professor Meade Brooks, Collin College Chapter 12: STATIC EQUILIBRIUM AND ELASTICITY Two stilt walkers in standing position. All forces acting on each stilt walker balance out; neither
UNIVERSITY PHYSICS I Professor Meade Brooks, Collin College Chapter 12: STATIC EQUILIBRIUM AND ELASTICITY Two stilt walkers in standing position. All forces acting on each stilt walker balance out; neither
Statics. Phys101 Lectures 19,20. Key points: The Conditions for static equilibrium Solving statics problems Stress and strain. Ref: 9-1,2,3,4,5.
 Phys101 Lectures 19,20 Statics Key points: The Conditions for static equilibrium Solving statics problems Stress and strain Ref: 9-1,2,3,4,5. Page 1 The Conditions for Static Equilibrium An object in static
Phys101 Lectures 19,20 Statics Key points: The Conditions for static equilibrium Solving statics problems Stress and strain Ref: 9-1,2,3,4,5. Page 1 The Conditions for Static Equilibrium An object in static
Kinesiology 201 Solutions Kinematics
 Kinesiology 201 Solutions Kinematics Tony Leyland School of Kinesiology Simon Fraser University 1. a) Vertical ocity = 10 sin20 = 3.42 m/s Horizontal ocity = 10 cos20 = 9.4 m/s B Vertical A-B (start to
Kinesiology 201 Solutions Kinematics Tony Leyland School of Kinesiology Simon Fraser University 1. a) Vertical ocity = 10 sin20 = 3.42 m/s Horizontal ocity = 10 cos20 = 9.4 m/s B Vertical A-B (start to
In your answer, you should use appropriate technical terms, spelled correctly [1]
![In your answer, you should use appropriate technical terms, spelled correctly [1]](/thumbs/79/79102420.jpg "In your answer, you should use appropriate technical terms, spelled correctly [1]") 1 (a) Define moment of a force. In your answer, you should use appropriate technical terms, spelled correctly.... [1] (b) State the two conditions that apply when an object is in equilibrium. 1.... 2....
1 (a) Define moment of a force. In your answer, you should use appropriate technical terms, spelled correctly.... [1] (b) State the two conditions that apply when an object is in equilibrium. 1.... 2....
ANTHROPOMETRY (İnsan Vücudunu Ölçme Bilimi)
") ANTHROPOMETRY (İnsan Vücudunu Ölçme Bilimi) Dr. Kurtuluş Erinç Akdoğan kurtuluserinc@cankaya.edu.tr INTRODUCTION Anthropometry is the major branch of anthropology (insan bilimi) that studies the physical
ANTHROPOMETRY (İnsan Vücudunu Ölçme Bilimi) Dr. Kurtuluş Erinç Akdoğan kurtuluserinc@cankaya.edu.tr INTRODUCTION Anthropometry is the major branch of anthropology (insan bilimi) that studies the physical
Mechanical energy transfer by internal force during the swing phase of running
 Available online at www.sciencedirect.com Procedia Engineering 34 (2012 ) 772 777 9 th Conference of the International Sports Engineering Association (ISEA) Mechanical energy transfer by internal force
Available online at www.sciencedirect.com Procedia Engineering 34 (2012 ) 772 777 9 th Conference of the International Sports Engineering Association (ISEA) Mechanical energy transfer by internal force
Torque and Static Equilibrium
 Torque and Static Equilibrium Ch. 7.3, 8.1 (KJF 3 rd ed.) Phys 114 Eyres Torque 1 Causing rotation: Torque Three factors affect the how a force can affect the rotation: The magnitude of the force The distance,
Torque and Static Equilibrium Ch. 7.3, 8.1 (KJF 3 rd ed.) Phys 114 Eyres Torque 1 Causing rotation: Torque Three factors affect the how a force can affect the rotation: The magnitude of the force The distance,
Chapter 8 continued. Rotational Dynamics
 Chapter 8 continued Rotational Dynamics 8.6 The Action of Forces and Torques on Rigid Objects Chapter 8 developed the concepts of angular motion. θ : angles and radian measure for angular variables ω :
Chapter 8 continued Rotational Dynamics 8.6 The Action of Forces and Torques on Rigid Objects Chapter 8 developed the concepts of angular motion. θ : angles and radian measure for angular variables ω :
Static Equilibrium and Elasticity. Luis Anchordoqui
 Static Equilibrium and Elasticity The Conditions for Equilibrium An object with forces acting on it, but that is not moving, is said to be in equilibrium. The Conditions for Equilibrium (cont d) The first
Static Equilibrium and Elasticity The Conditions for Equilibrium An object with forces acting on it, but that is not moving, is said to be in equilibrium. The Conditions for Equilibrium (cont d) The first
CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5
 1 / 36 CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Date: 2 / 36 EQUATIONS OF MOTION: ROTATION
1 / 36 CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Date: 2 / 36 EQUATIONS OF MOTION: ROTATION
ROTATIONAL DYNAMICS AND STATIC EQUILIBRIUM
 ROTATIONAL DYNAMICS AND STATIC EQUILIBRIUM Chapter 11 Units of Chapter 11 Torque Torque and Angular Acceleration Zero Torque and Static Equilibrium Center of Mass and Balance Dynamic Applications of Torque
ROTATIONAL DYNAMICS AND STATIC EQUILIBRIUM Chapter 11 Units of Chapter 11 Torque Torque and Angular Acceleration Zero Torque and Static Equilibrium Center of Mass and Balance Dynamic Applications of Torque
Rotational Motion What is the difference between translational and rotational motion? Translational motion.
 Rotational Motion 1 1. What is the difference between translational and rotational motion? Translational motion Rotational motion 2. What is a rigid object? 3. What is rotational motion? 4. Identify and
Rotational Motion 1 1. What is the difference between translational and rotational motion? Translational motion Rotational motion 2. What is a rigid object? 3. What is rotational motion? 4. Identify and
2008 FXA THREE FORCES IN EQUILIBRIUM 1. Candidates should be able to : TRIANGLE OF FORCES RULE
 THREE ORCES IN EQUILIBRIUM 1 Candidates should be able to : TRIANGLE O ORCES RULE Draw and use a triangle of forces to represent the equilibrium of three forces acting at a point in an object. State that
THREE ORCES IN EQUILIBRIUM 1 Candidates should be able to : TRIANGLE O ORCES RULE Draw and use a triangle of forces to represent the equilibrium of three forces acting at a point in an object. State that
Definition. is a measure of how much a force acting on an object causes that object to rotate, symbol is, (Greek letter tau)
") Torque Definition is a measure of how much a force acting on an object causes that object to rotate, symbol is, (Greek letter tau) = r F = rfsin, r = distance from pivot to force, F is the applied force
Torque Definition is a measure of how much a force acting on an object causes that object to rotate, symbol is, (Greek letter tau) = r F = rfsin, r = distance from pivot to force, F is the applied force
Forces on and in the Body
 Forces on and in the Body Physicists recognize four fundamental forces. In order of their relative strength from weakest to strongest. They are: 1- Gravitational force 2- Electrical force 3- Weak nuclear
Forces on and in the Body Physicists recognize four fundamental forces. In order of their relative strength from weakest to strongest. They are: 1- Gravitational force 2- Electrical force 3- Weak nuclear
BIODYNAMICS: A LAGRANGIAN APPROACH
 Source: STANDARD HANDBOOK OF BIOMEDICAL ENGINEERING AND DESIGN CHAPTER 7 BIODYNAMICS: A LAGRANGIAN APPROACH Donald R. Peterson Biodynamics Laboratory at the Ergonomic Technology Center, University of Connecticut
Source: STANDARD HANDBOOK OF BIOMEDICAL ENGINEERING AND DESIGN CHAPTER 7 BIODYNAMICS: A LAGRANGIAN APPROACH Donald R. Peterson Biodynamics Laboratory at the Ergonomic Technology Center, University of Connecticut
Illustrative exercises for the lectures
 Biomechanics, LTH, 2013 Biomechanics Illustrative exercises for the lectures Ingrid Svensson 2013 1 1. To practise the use of free-body diagram, consider the problem of analyzing the stress in man s back
Biomechanics, LTH, 2013 Biomechanics Illustrative exercises for the lectures Ingrid Svensson 2013 1 1. To practise the use of free-body diagram, consider the problem of analyzing the stress in man s back
Levers of the Musculoskeletal System
 Levers of the Musculoskeletal System Lever system consists of: lever fulcrum load force Three classes of levers 1. first class (a) - pry bars, crowbars 2. second class (b) - wheelbarrow 3. third class
Levers of the Musculoskeletal System Lever system consists of: lever fulcrum load force Three classes of levers 1. first class (a) - pry bars, crowbars 2. second class (b) - wheelbarrow 3. third class
Chapter 9. Rotational Dynamics
 Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Translational Motion Rotational Motion Equations Sheet
 PHYSICS 01 Translational Motion Rotational Motion Equations Sheet LINEAR ANGULAR Time t t Displacement x; (x = rθ) θ Velocity v = Δx/Δt; (v = rω) ω = Δθ/Δt Acceleration a = Δv/Δt; (a = rα) α = Δω/Δt (
PHYSICS 01 Translational Motion Rotational Motion Equations Sheet LINEAR ANGULAR Time t t Displacement x; (x = rθ) θ Velocity v = Δx/Δt; (v = rω) ω = Δθ/Δt Acceleration a = Δv/Δt; (a = rα) α = Δω/Δt (
Chapter 10: Dynamics of Rotational Motion
 Chapter 10: Dynamics of Rotational Motion What causes an angular acceleration? The effectiveness of a force at causing a rotation is called torque. QuickCheck 12.5 The four forces shown have the same strength.
Chapter 10: Dynamics of Rotational Motion What causes an angular acceleration? The effectiveness of a force at causing a rotation is called torque. QuickCheck 12.5 The four forces shown have the same strength.
The Biomechanics Behind Kicking a Soccer Ball
 VANIER COLLEGE The Biomechanics Behind Kicking a Soccer Ball The Energy Demands of the Body Raymond You Linear Algebra II Ivan T. Ivanov 5/19/2013 1 What is Inertia? Inertia is defined as an object s resistance
VANIER COLLEGE The Biomechanics Behind Kicking a Soccer Ball The Energy Demands of the Body Raymond You Linear Algebra II Ivan T. Ivanov 5/19/2013 1 What is Inertia? Inertia is defined as an object s resistance
Chapter 8. Rotational Motion
 Chapter 8 Rotational Motion The Action of Forces and Torques on Rigid Objects In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of
Chapter 8 Rotational Motion The Action of Forces and Torques on Rigid Objects In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of
Anthropometry Formulas
 Anthropometry Formulas W. Rose KAAP47/67 Segment Dimensions FF = mmmm, dddd dddd = FF mm ττ = IIII, dddd dddd = ττ II Length of body segments is often obtainable by direct measurement. If not, the segment
Anthropometry Formulas W. Rose KAAP47/67 Segment Dimensions FF = mmmm, dddd dddd = FF mm ττ = IIII, dddd dddd = ττ II Length of body segments is often obtainable by direct measurement. If not, the segment
Physics 6A Lab Experiment 6
 Biceps Muscle Model Physics 6A Lab Experiment 6 APPARATUS Biceps model Large mass hanger with four 1-kg masses Small mass hanger for hand end of forearm bar with five 100-g masses Meter stick Centimeter
Biceps Muscle Model Physics 6A Lab Experiment 6 APPARATUS Biceps model Large mass hanger with four 1-kg masses Small mass hanger for hand end of forearm bar with five 100-g masses Meter stick Centimeter
HPER K530 Mechanical Analysis of Human Performance Fall, 2003 MID-TERM
 HPER K530 Mechanical Analysis of Human Performance Fall, 2003 Dapena MID-TERM Equations: S = S 0 + v t S = S 0 + v 0 t + 1/2 a t 2 v = v 0 + a t v 2 = v 2 0 + 2 a (S-S 0 ) e = h b /h d F CP = m v 2 / r
HPER K530 Mechanical Analysis of Human Performance Fall, 2003 Dapena MID-TERM Equations: S = S 0 + v t S = S 0 + v 0 t + 1/2 a t 2 v = v 0 + a t v 2 = v 2 0 + 2 a (S-S 0 ) e = h b /h d F CP = m v 2 / r
Three-Dimensional Biomechanical Analysis of Human Movement
 Three-Dimensional Biomechanical Analysis of Human Movement Anthropometric Measurements Motion Data Acquisition Force Platform Body Mass & Height Biomechanical Model Moments of Inertia and Locations of
Three-Dimensional Biomechanical Analysis of Human Movement Anthropometric Measurements Motion Data Acquisition Force Platform Body Mass & Height Biomechanical Model Moments of Inertia and Locations of
Chapter 9- Static Equilibrium
 Chapter 9- Static Equilibrium Changes in Office-hours The following changes will take place until the end of the semester Office-hours: - Monday, 12:00-13:00h - Wednesday, 14:00-15:00h - Friday, 13:00-14:00h
Chapter 9- Static Equilibrium Changes in Office-hours The following changes will take place until the end of the semester Office-hours: - Monday, 12:00-13:00h - Wednesday, 14:00-15:00h - Friday, 13:00-14:00h
= y(x, t) =A cos (!t + kx)
 =A cos (!t + kx)") A harmonic wave propagates horizontally along a taut string of length L = 8.0 m and mass M = 0.23 kg. The vertical displacement of the string along its length is given by y(x, t) = 0. m cos(.5 t + 0.8
A harmonic wave propagates horizontally along a taut string of length L = 8.0 m and mass M = 0.23 kg. The vertical displacement of the string along its length is given by y(x, t) = 0. m cos(.5 t + 0.8
PLANAR KINETIC EQUATIONS OF MOTION: TRANSLATION (Sections ) Today s Objectives: Students will be able to: a) Apply the three equations of
 Today s Objectives: Students will be able to: a) Apply the three equations of") PLANAR KINETIC EQUATIONS OF MOTION: TRANSLATION (Sections 17.2-17.3) Today s Objectives: Students will be able to: a) Apply the three equations of motion for a rigid body in planar motion. b) Analyze problems
PLANAR KINETIC EQUATIONS OF MOTION: TRANSLATION (Sections 17.2-17.3) Today s Objectives: Students will be able to: a) Apply the three equations of motion for a rigid body in planar motion. b) Analyze problems
HSC PHYSICS ONLINE B F BA. repulsion between two negatively charged objects. attraction between a negative charge and a positive charge
 HSC PHYSICS ONLINE DYNAMICS TYPES O ORCES Electrostatic force (force mediated by a field - long range: action at a distance) the attractive or repulsion between two stationary charged objects. AB A B BA
HSC PHYSICS ONLINE DYNAMICS TYPES O ORCES Electrostatic force (force mediated by a field - long range: action at a distance) the attractive or repulsion between two stationary charged objects. AB A B BA
Lecture 10. Example: Friction and Motion
 Lecture 10 Goals: Exploit Newton s 3 rd Law in problems with friction Employ Newton s Laws in 2D problems with circular motion Assignment: HW5, (Chapter 7, due 2/24, Wednesday) For Tuesday: Finish reading
Lecture 10 Goals: Exploit Newton s 3 rd Law in problems with friction Employ Newton s Laws in 2D problems with circular motion Assignment: HW5, (Chapter 7, due 2/24, Wednesday) For Tuesday: Finish reading
Chapter 18 Static Equilibrium
 Chapter 8 Static Equilibrium Chapter 8 Static Equilibrium... 8. Introduction Static Equilibrium... 8. Lever Law... 3 Example 8. Lever Law... 5 8.3 Generalized Lever Law... 6 8.4 Worked Examples... 8 Example
Chapter 8 Static Equilibrium Chapter 8 Static Equilibrium... 8. Introduction Static Equilibrium... 8. Lever Law... 3 Example 8. Lever Law... 5 8.3 Generalized Lever Law... 6 8.4 Worked Examples... 8 Example
LECTURE 22 EQUILIBRIUM. Instructor: Kazumi Tolich
 LECTURE 22 EQUILIBRIUM Instructor: Kazumi Tolich Lecture 22 2 Reading chapter 11-3 to 11-4 Static equilibrium Center of mass and balance Static equilibrium 3 If a rigid object is in equilibrium (constant
LECTURE 22 EQUILIBRIUM Instructor: Kazumi Tolich Lecture 22 2 Reading chapter 11-3 to 11-4 Static equilibrium Center of mass and balance Static equilibrium 3 If a rigid object is in equilibrium (constant
Lecture Presentation Chapter 8 Equilibrium and Elasticity
 Lecture Presentation Chapter 8 Equilibrium and Elasticity Suggested Videos for Chapter 8 Prelecture Videos Static Equilibrium Elasticity Video Tutor Solutions Equilibrium and Elasticity Class Videos Center
Lecture Presentation Chapter 8 Equilibrium and Elasticity Suggested Videos for Chapter 8 Prelecture Videos Static Equilibrium Elasticity Video Tutor Solutions Equilibrium and Elasticity Class Videos Center
physical interaction enhance performance minimizing the risk
 Kin 420 Midterm 1 review What are Tichauer s 15 principles o Keep elbows in o Minimize spine moments o Avoid covert lifting tasks o Gender differences o Optimize joint position for max muscle force o Reduce
Kin 420 Midterm 1 review What are Tichauer s 15 principles o Keep elbows in o Minimize spine moments o Avoid covert lifting tasks o Gender differences o Optimize joint position for max muscle force o Reduce
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2)
") PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
On my honor as a Texas A&M University student, I will neither give nor receive unauthorized help on this exam.
 Physics 201, Exam 3 Name (printed) On my honor as a Texas A&M University student, I will neither give nor receive unauthorized help on this exam. Name (signed) The multiple-choice problems carry no partial
Physics 201, Exam 3 Name (printed) On my honor as a Texas A&M University student, I will neither give nor receive unauthorized help on this exam. Name (signed) The multiple-choice problems carry no partial
We define angular displacement, θ, and angular velocity, ω. What's a radian?
 We define angular displacement, θ, and angular velocity, ω Units: θ = rad ω = rad/s What's a radian? Radian is the ratio between the length of an arc and its radius note: counterclockwise is + clockwise
We define angular displacement, θ, and angular velocity, ω Units: θ = rad ω = rad/s What's a radian? Radian is the ratio between the length of an arc and its radius note: counterclockwise is + clockwise
Vector Mechanics: Statics
 PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
5. Plane Kinetics of Rigid Bodies
 5. Plane Kinetics of Rigid Bodies 5.1 Mass moments of inertia 5.2 General equations of motion 5.3 Translation 5.4 Fixed axis rotation 5.5 General plane motion 5.6 Work and energy relations 5.7 Impulse
5. Plane Kinetics of Rigid Bodies 5.1 Mass moments of inertia 5.2 General equations of motion 5.3 Translation 5.4 Fixed axis rotation 5.5 General plane motion 5.6 Work and energy relations 5.7 Impulse
Your Name: PHYSICS 101 MIDTERM. Please circle your section 1 9 am Galbiati 2 10 am Kwon 3 11 am McDonald 4 12:30 pm McDonald 5 12:30 pm Kwon
 1 Your Name: PHYSICS 101 MIDTERM October 26, 2006 2 hours Please circle your section 1 9 am Galbiati 2 10 am Kwon 3 11 am McDonald 4 12:30 pm McDonald 5 12:30 pm Kwon Problem Score 1 /13 2 /20 3 /20 4
1 Your Name: PHYSICS 101 MIDTERM October 26, 2006 2 hours Please circle your section 1 9 am Galbiati 2 10 am Kwon 3 11 am McDonald 4 12:30 pm McDonald 5 12:30 pm Kwon Problem Score 1 /13 2 /20 3 /20 4
24/06/13 Forces ( F.Robilliard) 1
 1") R Fr F W 24/06/13 Forces ( F.Robilliard) 1 Mass: So far, in our studies of mechanics, we have considered the motion of idealised particles moving geometrically through space. Why a particular particle
R Fr F W 24/06/13 Forces ( F.Robilliard) 1 Mass: So far, in our studies of mechanics, we have considered the motion of idealised particles moving geometrically through space. Why a particular particle
CEE 271: Applied Mechanics II, Dynamics Lecture 24: Ch.17, Sec.1-3
 1 / 38 CEE 271: Applied Mechanics II, Dynamics Lecture 24: Ch.17, Sec.1-3 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Tuesday, Nov. 13, 2012 2 / 38 MOMENT OF
1 / 38 CEE 271: Applied Mechanics II, Dynamics Lecture 24: Ch.17, Sec.1-3 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Tuesday, Nov. 13, 2012 2 / 38 MOMENT OF
PHYSICS 149: Lecture 21
 PHYSICS 149: Lecture 21 Chapter 8: Torque and Angular Momentum 8.2 Torque 8.4 Equilibrium Revisited 8.8 Angular Momentum Lecture 21 Purdue University, Physics 149 1 Midterm Exam 2 Wednesday, April 6, 6:30
PHYSICS 149: Lecture 21 Chapter 8: Torque and Angular Momentum 8.2 Torque 8.4 Equilibrium Revisited 8.8 Angular Momentum Lecture 21 Purdue University, Physics 149 1 Midterm Exam 2 Wednesday, April 6, 6:30
PLANAR KINETIC EQUATIONS OF MOTION: TRANSLATION
 PLANAR KINETIC EQUATIONS OF MOTION: TRANSLATION Today s Objectives: Students will be able to: 1. Apply the three equations of motion for a rigid body in planar motion. 2. Analyze problems involving translational
PLANAR KINETIC EQUATIONS OF MOTION: TRANSLATION Today s Objectives: Students will be able to: 1. Apply the three equations of motion for a rigid body in planar motion. 2. Analyze problems involving translational
Chapter 8 continued. Rotational Dynamics
 Chapter 8 continued Rotational Dynamics 8.4 Rotational Work and Energy Work to accelerate a mass rotating it by angle φ F W = F(cosθ)x x = rφ = Frφ Fr = τ (torque) = τφ r φ s F to x θ = 0 DEFINITION OF
Chapter 8 continued Rotational Dynamics 8.4 Rotational Work and Energy Work to accelerate a mass rotating it by angle φ F W = F(cosθ)x x = rφ = Frφ Fr = τ (torque) = τφ r φ s F to x θ = 0 DEFINITION OF
LECTURE 9 FRICTION & SPRINGS. Instructor: Kazumi Tolich
 LECTURE 9 FRICTION & SPRINGS Instructor: Kazumi Tolich Lecture 9 2 Reading chapter 6-1 to 6-2 Friction n Static friction n Kinetic friction Springs Static friction 3 Static friction is the frictional force
LECTURE 9 FRICTION & SPRINGS Instructor: Kazumi Tolich Lecture 9 2 Reading chapter 6-1 to 6-2 Friction n Static friction n Kinetic friction Springs Static friction 3 Static friction is the frictional force
Human Arm. 1 Purpose. 2 Theory. 2.1 Equation of Motion for a Rotating Rigid Body
 Human Arm Equipment: Capstone, Human Arm Model, 45 cm rod, sensor mounting clamp, sensor mounting studs, 2 cord locks, non elastic cord, elastic cord, two blue pasport force sensors, large table clamps,
Human Arm Equipment: Capstone, Human Arm Model, 45 cm rod, sensor mounting clamp, sensor mounting studs, 2 cord locks, non elastic cord, elastic cord, two blue pasport force sensors, large table clamps,
UNIVERSITY OF SASKATCHEWAN Department of Physics and Engineering Physics
 UNIVERSITY OF SASKATCHEWAN Department of Physics and Engineering Physics Physics 115.3 Physics and the Universe FINAL EXAMINATION December 19, 2015 NAME: (Last) Please Print (Given) Time: 3 hours STUDENT
UNIVERSITY OF SASKATCHEWAN Department of Physics and Engineering Physics Physics 115.3 Physics and the Universe FINAL EXAMINATION December 19, 2015 NAME: (Last) Please Print (Given) Time: 3 hours STUDENT
Kinesiology 201 Solutions Fluid and Sports Biomechanics
 Kinesiology 201 Solutions Fluid and Sports Biomechanics Tony Leyland School of Kinesiology Simon Fraser University Fluid Biomechanics 1. Lift force is a force due to fluid flow around a body that acts
Kinesiology 201 Solutions Fluid and Sports Biomechanics Tony Leyland School of Kinesiology Simon Fraser University Fluid Biomechanics 1. Lift force is a force due to fluid flow around a body that acts
Chapter 12 Static Equilibrium; Elasticity and Fracture
 2009 Pearson Education, Inc. This work is protected by United States copyright laws and is provided solely for the use of instructors in teaching their courses and assessing student learning. Dissemination
2009 Pearson Education, Inc. This work is protected by United States copyright laws and is provided solely for the use of instructors in teaching their courses and assessing student learning. Dissemination
LECTURE 11 FRICTION AND DRAG
 LECTURE 11 FRICTION AND DRAG 5.5 Friction Static friction Kinetic friction 5.6 Drag Terminal speed Penguins travel on ice for miles by sliding on ice, made possible by small frictional force between their
LECTURE 11 FRICTION AND DRAG 5.5 Friction Static friction Kinetic friction 5.6 Drag Terminal speed Penguins travel on ice for miles by sliding on ice, made possible by small frictional force between their
Practice. Newton s 3 Laws of Motion. Recall. Forces a push or pull acting on an object; a vector quantity measured in Newtons (kg m/s²)
") Practice A car starts from rest and travels upwards along a straight road inclined at an angle of 5 from the horizontal. The length of the road is 450 m and the mass of the car is 800 kg. The speed of
Practice A car starts from rest and travels upwards along a straight road inclined at an angle of 5 from the horizontal. The length of the road is 450 m and the mass of the car is 800 kg. The speed of
ΣF = 0 and Στ = 0 In 2-d: ΣF X = 0 and ΣF Y = 0 Goal: Write expression for Στ and ΣF
 Thur Sept 24 Assign 5 Friday Exam Mon Oct 5 Morton 235 7:15-9:15 PM Email if conflict Today: Rotation and Torques Static Equilibrium Sign convention for torques: (-) CW torque (+) CCW torque Equilibrium
Thur Sept 24 Assign 5 Friday Exam Mon Oct 5 Morton 235 7:15-9:15 PM Email if conflict Today: Rotation and Torques Static Equilibrium Sign convention for torques: (-) CW torque (+) CCW torque Equilibrium
Chapter 8. Rotational Kinematics
 Chapter 8 Rotational Kinematics 8.3 The Equations of Rotational Kinematics 8.4 Angular Variables and Tangential Variables The relationship between the (tangential) arc length, s, at some radius, r, and
Chapter 8 Rotational Kinematics 8.3 The Equations of Rotational Kinematics 8.4 Angular Variables and Tangential Variables The relationship between the (tangential) arc length, s, at some radius, r, and
Static Equilibrium and Torque
 10.3 Static Equilibrium and Torque SECTION OUTCOMES Use vector analysis in two dimensions for systems involving static equilibrium and torques. Apply static torques to structures such as seesaws and bridges.
10.3 Static Equilibrium and Torque SECTION OUTCOMES Use vector analysis in two dimensions for systems involving static equilibrium and torques. Apply static torques to structures such as seesaws and bridges.
Chapter 12. Static Equilibrium and Elasticity
 Chapter 12 Static Equilibrium and Elasticity Static Equilibrium Equilibrium implies that the object moves with both constant velocity and constant angular velocity relative to an observer in an inertial
Chapter 12 Static Equilibrium and Elasticity Static Equilibrium Equilibrium implies that the object moves with both constant velocity and constant angular velocity relative to an observer in an inertial
11. (7 points: Choose up to 3 answers) What is the tension,!, in the string? a.! = 0.10 N b.! = 0.21 N c.! = 0.29 N d.! = N e.! = 0.
 What is the tension,!, in the string? a.! = 0.10 N b.! = 0.21 N c.! = 0.29 N d.! = N e.! = 0.") A harmonic wave propagates horizontally along a taut string of length! = 8.0 m and mass! = 0.23 kg. The vertical displacement of the string along its length is given by!!,! = 0.1!m cos 1.5!!! +!0.8!!,
A harmonic wave propagates horizontally along a taut string of length! = 8.0 m and mass! = 0.23 kg. The vertical displacement of the string along its length is given by!!,! = 0.1!m cos 1.5!!! +!0.8!!,
A. B. C. D. E. v x. ΣF x
 Q4.3 The graph to the right shows the velocity of an object as a function of time. Which of the graphs below best shows the net force versus time for this object? 0 v x t ΣF x ΣF x ΣF x ΣF x ΣF x 0 t 0
Q4.3 The graph to the right shows the velocity of an object as a function of time. Which of the graphs below best shows the net force versus time for this object? 0 v x t ΣF x ΣF x ΣF x ΣF x ΣF x 0 t 0
Friction and Motion. Prof. Paul Eugenio 13 Sep Friction (cont.) Motion: kinetics and dynamics Vertical jump Energy conservation
 Motion: kinetics and dynamics Vertical jump Energy conservation") Friction and Motion Friction (cont.) Motion: kinetics and dynamics Vertical jump Energy conservation Ukulele means jumping flea Prof. Paul Eugenio 13 Sep 2018 Lecture 5 Reactive, Normal, and Friction Forces
Friction and Motion Friction (cont.) Motion: kinetics and dynamics Vertical jump Energy conservation Ukulele means jumping flea Prof. Paul Eugenio 13 Sep 2018 Lecture 5 Reactive, Normal, and Friction Forces
Chapter 8 continued. Rotational Dynamics
 Chapter 8 continued Rotational Dynamics 8.4 Rotational Work and Energy Work to accelerate a mass rotating it by angle φ F W = F(cosθ)x x = s = rφ = Frφ Fr = τ (torque) = τφ r φ s F to s θ = 0 DEFINITION
Chapter 8 continued Rotational Dynamics 8.4 Rotational Work and Energy Work to accelerate a mass rotating it by angle φ F W = F(cosθ)x x = s = rφ = Frφ Fr = τ (torque) = τφ r φ s F to s θ = 0 DEFINITION
Chapter 8 Rotational Motion
 Chapter 8 Rotational Motion Chapter 8 Rotational Motion In this chapter you will: Learn how to describe and measure rotational motion. Learn how torque changes rotational velocity. Explore factors that
Chapter 8 Rotational Motion Chapter 8 Rotational Motion In this chapter you will: Learn how to describe and measure rotational motion. Learn how torque changes rotational velocity. Explore factors that
Chapter 9. Rotational Dynamics
 Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Lecture 8. Torque. and Equilibrium. Pre-reading: KJF 8.1 and 8.2
 Lecture 8 Torque and Equilibrium Pre-reading: KJF 8.1 and 8.2 Archimedes Lever Rule At equilibrium (and with forces 90 to lever): r 1 F 1 = r 2 F 2 2 General Lever Rule For general angles r 1 F 1 sin θ
Lecture 8 Torque and Equilibrium Pre-reading: KJF 8.1 and 8.2 Archimedes Lever Rule At equilibrium (and with forces 90 to lever): r 1 F 1 = r 2 F 2 2 General Lever Rule For general angles r 1 F 1 sin θ
AP Physics 1 Rotational Motion Practice Test
 AP Physics 1 Rotational Motion Practice Test MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) A spinning ice skater on extremely smooth ice is able
AP Physics 1 Rotational Motion Practice Test MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) A spinning ice skater on extremely smooth ice is able
Chapter 9. Rotational Dynamics
 Chapter 9 Rotational Dynamics 9.1 The Action of Forces and Torques on Rigid Objects In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination
Chapter 9 Rotational Dynamics 9.1 The Action of Forces and Torques on Rigid Objects In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination
AP Physics QUIZ Chapters 10
 Name: 1. Torque is the rotational analogue of (A) Kinetic Energy (B) Linear Momentum (C) Acceleration (D) Force (E) Mass A 5-kilogram sphere is connected to a 10-kilogram sphere by a rigid rod of negligible
Name: 1. Torque is the rotational analogue of (A) Kinetic Energy (B) Linear Momentum (C) Acceleration (D) Force (E) Mass A 5-kilogram sphere is connected to a 10-kilogram sphere by a rigid rod of negligible
SOLUTION a. Since the applied force is equal to the person s weight, the spring constant is 670 N m ( )( )
( )") 5. ssm A person who weighs 670 N steps onto a spring scale in the bathroom, and the spring compresses by 0.79 cm. (a) What is the spring constant? (b) What is the weight of another person who compresses
5. ssm A person who weighs 670 N steps onto a spring scale in the bathroom, and the spring compresses by 0.79 cm. (a) What is the spring constant? (b) What is the weight of another person who compresses
Answers to selected problems from Essential Physics, Chapter 10
 Answers to selected problems from Essential Physics, Chapter 10 1. (a) The red ones have the same speed as one another. The blue ones also have the same speed as one another, with a value twice the speed
Answers to selected problems from Essential Physics, Chapter 10 1. (a) The red ones have the same speed as one another. The blue ones also have the same speed as one another, with a value twice the speed
Harmonic Oscillator. Mass-Spring Oscillator Resonance The Pendulum. Physics 109 Experiment Number 12
 Harmonic Oscillator Mass-Spring Oscillator Resonance The Pendulum Physics 109 Experiment Number 12 Outline Simple harmonic motion The vertical mass-spring system Driven oscillations and resonance The pendulum
Harmonic Oscillator Mass-Spring Oscillator Resonance The Pendulum Physics 109 Experiment Number 12 Outline Simple harmonic motion The vertical mass-spring system Driven oscillations and resonance The pendulum
18. Which body system is needed for the exchange of oxygen and carbon dioxide? A. Respiratory B. Integumentary C. Digestive D. Urinary 19.
 1 Student: 1. Which of the following is NOT a part of the study of anatomy? A. The structure of body parts B. Predicting the body's responses to stimuli C. Microscopic organization D. The relationship
1 Student: 1. Which of the following is NOT a part of the study of anatomy? A. The structure of body parts B. Predicting the body's responses to stimuli C. Microscopic organization D. The relationship
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Introduction to vibration
 Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Introduction to vibration Module 15 Lecture 38 Vibration of Rigid Bodies Part-1 Today,
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Introduction to vibration Module 15 Lecture 38 Vibration of Rigid Bodies Part-1 Today,
Chapter 8 Rotational Motion and Equilibrium. 1. Give explanation of torque in own words after doing balance-the-torques lab as an inquiry introduction
 Chapter 8 Rotational Motion and Equilibrium Name 1. Give explanation of torque in own words after doing balance-the-torques lab as an inquiry introduction 1. The distance between a turning axis and the
Chapter 8 Rotational Motion and Equilibrium Name 1. Give explanation of torque in own words after doing balance-the-torques lab as an inquiry introduction 1. The distance between a turning axis and the
CEE 271: Applied Mechanics II, Dynamics Lecture 9: Ch.13, Sec.4-5
 1 / 40 CEE 271: Applied Mechanics II, Dynamics Lecture 9: Ch.13, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa 2 / 40 EQUATIONS OF MOTION:RECTANGULAR COORDINATES
1 / 40 CEE 271: Applied Mechanics II, Dynamics Lecture 9: Ch.13, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa 2 / 40 EQUATIONS OF MOTION:RECTANGULAR COORDINATES
CHAPTER 4: Linear motion and angular motion. Practice questions - text book pages 91 to 95 QUESTIONS AND ANSWERS. Answers
 CHAPTER 4: Linear motion and angular motion Practice questions - text book pages 91 to 95 1) Which of the following pairs of quantities is not a vector/scalar pair? a. /mass. b. reaction force/centre of
CHAPTER 4: Linear motion and angular motion Practice questions - text book pages 91 to 95 1) Which of the following pairs of quantities is not a vector/scalar pair? a. /mass. b. reaction force/centre of
Announcements. Principle of Work and Energy - Sections Engr222 Spring 2004 Chapter Test Wednesday
 Announcements Test Wednesday Closed book 3 page sheet sheet (on web) Calculator Chap 12.6-10, 13.1-6 Principle of Work and Energy - Sections 14.1-3 Today s Objectives: Students will be able to: a) Calculate
Announcements Test Wednesday Closed book 3 page sheet sheet (on web) Calculator Chap 12.6-10, 13.1-6 Principle of Work and Energy - Sections 14.1-3 Today s Objectives: Students will be able to: a) Calculate