Orientation Distribution Function for Diffusion MRI
|
|
|
- Peter Simpson
- 5 years ago
- Views:
Transcription
1 Orientation Distribution Function for Diffusion MRI Evgeniya Balmashnova 28 October 2009

2 Diffusion Tensor Imaging

3 Diffusion MRI

4 Diffusion MRI P(r, t) = 1 (4πDt) 3/2 e 1 4t r 2 D 1 t Diffusion time D Diffusion coefficient P Probability of travel to point r in time t

5 Diffusion Tensor Imaging P(r, t) = 1 (4π D t) 3/2 e 1 4t rt D 1 r D = D xx D xy D xz D yx D yy D yz D zx D zy D zz

6 Diffusion Tensor Imaging: Application

7 Diffusion Tensor Imaging

8 Diffusion Tensor Imaging

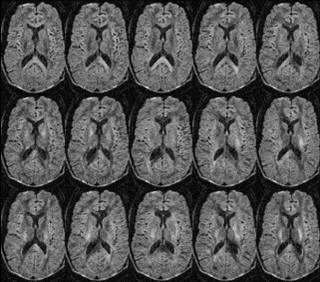
9 MRI and Diffusion Tensor Imaging
10 MRI and Diffusion Tensor Imaging

11 MRI and Diffusion Tensor Imaging

12 MRI and Diffusion Tensor Imaging

13 MRI and Diffusion Tensor Imaging
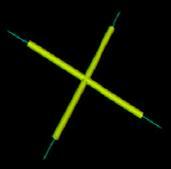
14 High Angular Resolution Diffusion Imaging S(g) = S 0 e bd(g) (Stejskal & Tanner, 1965)
 = S 0 e bd(g) (Stejskal & Tanner,")
15 High Angular Resolution Diffusion Imaging S(g) = S 0 e bd(g) (Stejskal & Tanner, 1965)
16 HARDI
17 HARDI
18 HARDI

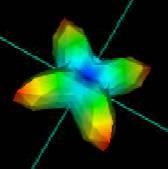
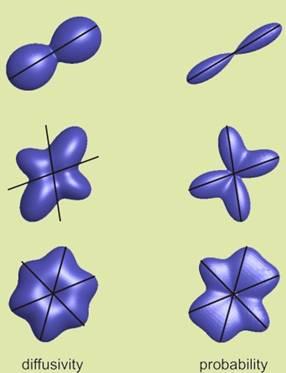
19 Diffusion Orientation Distribution Function
20 Diffusion Orientation Distribution Function

21 Diffusion Orientation Distribution Function

22 Diffusion Orientation Distribution Function
23 Alternative Decompositions Spherical harmonics N l D N (g) = c lm Y lm (g) l=0 m= l High order tensors 3 3 D N (g) =... D i 1...i N g i1... g in i 1 =1 i N =1 Hierarchial tensors N 3 3 D N (g) =... D i 1...i l g i1... g il (Florack & Balmashnova, 2008) l=0 i 1 =1 i N =1
24 Alternative Decompositions Spherical harmonics N l D N (g) = c lm Y lm (g) l=0 m= l High order tensors 3 3 D N (g) =... D i 1...i N g i1... g in i 1 =1 i N =1 Hierarchial tensors N 3 3 D N (g) =... D i 1...i l g i1... g il (Florack & Balmashnova, 2008) l=0 i 1 =1 i N =1
25 Alternative Decompositions Spherical harmonics N l D N (g) = c lm Y lm (g) l=0 m= l High order tensors 3 3 D N (g) =... D i 1...i N g i1... g in i 1 =1 i N =1 Hierarchial tensors N 3 3 D N (g) =... D i 1...i l g i1... g il (Florack & Balmashnova, 2008) l=0 i 1 =1 i N =1
26 Alternative Decompositions Spherical harmonics N l D N (g) = c lm Y lm (g) l=0 m= l High order tensors 3 3 D N (g) =... D i 1...i N g i1... g in i 1 =1 i N =1 Hierarchial tensors N 3 3 D N (g) =... D i 1...i l g i1... g il (Florack & Balmashnova, 2008) l=0 i 1 =1 i N =1
27 Spherical Harmonics Regularization Simple formula for ODF Requires bookkeeping No maxima detection High Order Tensors No straightforward regularization No straightforward ODF formulas Simple bookkeeping Maxima detection algorithms
28 Spherical Harmonics Regularization Simple formula for ODF Requires bookkeeping No maxima detection High Order Tensors No straightforward regularization No straightforward ODF formulas Simple bookkeeping Maxima detection algorithms
29 Spherical Harmonics Regularization Simple formula for ODF Requires bookkeeping No maxima detection High Order Tensors No straightforward regularization No straightforward ODF formulas Simple bookkeeping Maxima detection algorithms
30 Spherical Harmonics Regularization Simple formula for ODF Requires bookkeeping No maxima detection High Order Tensors No straightforward regularization No straightforward ODF formulas Simple bookkeeping Maxima detection algorithms
31 Spherical Harmonics Regularization Simple formula for ODF Requires bookkeeping No maxima detection High Order Tensors No straightforward regularization No straightforward ODF formulas Simple bookkeeping Maxima detection algorithms
32 Spherical Harmonics Regularization Simple formula for ODF Requires bookkeeping No maxima detection High Order Tensors No straightforward regularization No straightforward ODF formulas Simple bookkeeping Maxima detection algorithms
33 1. E 0 (D 0 ) = (S(g) D 0 ) 2 dω, Ω 2. E n(d i 1...in n 1 ) = ((S(g) D i 1...i k g i1... g ik ) D i 1...in g i1... g in ) 2 dω Ω k=0 D i 1...i n g i1... g in span{y nm (g), m = n,..., n}
34 1. E 0 (D 0 ) = (S(g) D 0 ) 2 dω, Ω 2. E n(d i 1...in n 1 ) = ((S(g) D i 1...i k g i1... g ik ) D i 1...in g i1... g in ) 2 dω Ω k=0 D i 1...i n g i1... g in span{y nm (g), m = n,..., n}
35 1. E 0 (D 0 ) = (S(g) D 0 ) 2 dω, Ω 2. E n(d i 1...in n 1 ) = ((S(g) D i 1...i k g i1... g ik ) D i 1...in g i1... g in ) 2 dω Ω k=0 D i 1...i n g i1... g in span{y nm (g), m = n,..., n}
36 Regularization D N (g)= N 3 l=0 i 1 = i N =1 Di 1...i l g i1...g il D t (g)=e t g D(g)= N 3 l=0 i 1 = i N =1 Di 1...i l(t) g i1...g il D i 1...i l (t) = e tl(l+1) D i 1...i l
37 Regularization D N (g)= N 3 l=0 i 1 = i N =1 Di 1...i l g i1...g il D t (g)=e t g D(g)= N 3 l=0 i 1 = i N =1 Di 1...i l(t) g i1...g il D i 1...i l (t) = e tl(l+1) D i 1...i l
38 Regularization D N (g)= N 3 l=0 i 1 = i N =1 Di 1...i l g i1...g il D t (g)=e t g D(g)= N 3 l=0 i 1 = i N =1 Di 1...i l(t) g i1...g il D i 1...i l (t) = e tl(l+1) D i 1...i l
39 Regularization D N (g)= N 3 l=0 i 1 = i N =1 Di 1...i l g i1...g il D t (g)=e t g D(g)= N 3 l=0 i 1 = i N =1 Di 1...i l(t) g i1...g il D i 1...i l (t) = e tl(l+1) D i 1...i l
40 Regularization D N (g)= N 3 l=0 i 1 = i N =1 Di 1...i l g i1...g il D t (g)=e t g D(g)= N 3 l=0 i 1 = i N =1 Di 1...i l(t) g i1...g il D i 1...i l (t) = e tl(l+1) D i 1...i l
41 MRI and Diffusion Tensor Imaging
42 MRI and Diffusion Tensor Imaging
43 MRI and Diffusion Tensor Imaging
44 MRI and Diffusion Tensor Imaging
45 MRI and Diffusion Tensor Imaging
46 MRI and Diffusion Tensor Imaging
47 MRI and Diffusion Tensor Imaging
48 MRI and Diffusion Tensor Imaging

49 MRI and Diffusion Tensor Imaging
50 MRI and Diffusion Tensor Imaging
51 MRI and Diffusion Tensor Imaging
52 MRI and Diffusion Tensor Imaging
53 MRI and Diffusion Tensor Imaging
54 MRI and Diffusion Tensor Imaging
55 Orientation Distribution Function P(R) = S(q) exp ( 2πiq R)dq ODF(g) = 0 P(r g)dr
56 Orientation Distribution Function P(R) = S(q) exp ( 2πiq R)dq ODF(g) = 0 P(r g)dr
57 Orientation Distribution Function: Q-ball Approximation by Funk-Radon transform ODF (g) ζ[s](g) = δ(g T w)s(w)dw w =1 w =1 δ(g T w)y lm (w)dw = 2πP l (0)Y lm (g)
58 Orientation Distribution Function: Q-ball Approximation by Funk-Radon transform ODF (g) ζ[s](g) = δ(g T w)s(w)dw w =1 w =1 δ(g T w)y lm (w)dw = 2πP l (0)Y lm (g)
59 Orientation Distribution Function: Q-ball Approximation by Funk-Radon transform ODF (g) ζ[s](g) = δ(g T w)s(w)dw w =1 w =1 δ(g T w)y lm (w)dw = 2πP l (0)Y lm (g)
60 Orientation Distribution Function: Q-ball 1. Fit Nth order tensor decomposition to the signal by solving linear system of equations. This yields D i 1...i k for k = 0,... N. 2. Compute the ODF coefficients D i 1...i k ODF (t) = 2π( 1)k/2 (k 1)!! k!! e k(k+1)t D i 1...i k.
61 Orientation Distribution Function: Q-ball 1. Fit Nth order tensor decomposition to the signal by solving linear system of equations. This yields D i 1...i k for k = 0,... N. 2. Compute the ODF coefficients D i 1...i k ODF (t) = 2π( 1)k/2 (k 1)!! k!! e k(k+1)t D i 1...i k.
62 Orientation Distribution Function: Q-ball 1. Fit Nth order tensor decomposition to the signal by solving linear system of equations. This yields D i 1...i k for k = 0,... N. 2. Compute the ODF coefficients D i 1...i k ODF (t) = 2π( 1)k/2 (k 1)!! k!! e k(k+1)t D i 1...i k.
63 Orientation Distribution Function: Q-ball 1. Fit Nth order tensor decomposition to the signal by solving linear system of equations. This yields D i 1...i k for k = 0,... N. 2. Compute the ODF coefficients D i 1...i k ODF (t) = 2π( 1)k/2 (k 1)!! k!! e k(k+1)t D i 1...i k.
64 Diffusion Orientation transform (DOT) P(R) = S(q) exp ( 2πiq R)dq e 2πiq R = 4π P(R 0 g) = l l=0 m= l l l=0 m= l ( i) l j l (2πqr)Y lm (u)y lm(g) ( i) l Y lm (g) Y lm (u)i l(u)du
65 Diffusion Orientation transform (DOT) P(R) = S(q) exp ( 2πiq R)dq e 2πiq R = 4π P(R 0 g) = l l=0 m= l l l=0 m= l ( i) l j l (2πqr)Y lm (u)y lm(g) ( i) l Y lm (g) Y lm (u)i l(u)du
66 Diffusion Orientation transform (DOT) P(R) = S(q) exp ( 2πiq R)dq e 2πiq R = 4π P(R 0 g) = l l=0 m= l l l=0 m= l ( i) l j l (2πqr)Y lm (u)y lm(g) ( i) l Y lm (g) Y lm (u)i l(u)du

67 Diffusion Orientation transform (DOT)
68 Diffusion Orientation transform (DOT) Quality depends on R 0 There is no way to indicate optimal choice of R 0 Not robust to noise
69 Diffusion Orientation transform (DOT) Quality depends on R 0 There is no way to indicate optimal choice of R 0 Not robust to noise
70 Diffusion Orientation transform (DOT) Quality depends on R 0 There is no way to indicate optimal choice of R 0 Not robust to noise
71 P(R 0 g) = l,m ( i) l Y lm (g) Y lm (u)i l(u, R 0 )du I l (u, R 0 ) = 4π ODF(g) = ( i) l Y lm (g) l,m 0 J 1 (2πqR 0 )e 4π2 q 2 td(u) dq Y ( ) lm (u) I l (u, R 0 )dr 0 du 0
72 P(R 0 g) = l,m ( i) l Y lm (g) Y lm (u)i l(u, R 0 )du I l (u, R 0 ) = 4π ODF (g) = ( i) l Y lm (g) l,m 0 J 1 (2πqR 0 )e 4π2 q 2 td(u) dq Y ( ) lm (u) I l (u, R 0 )dr 0 du 0
73 P(R 0 g) = l,m ( i) l Y lm (g) Y lm (u)i l(u, R 0 )du I l (u, R 0 ) = 4π ODF (g) = ( i) l Y lm (g) l,m 0 J 1 (2πqR 0 )e 4π2 q 2 td(u) dq Y ( ) lm (u) I l (u, R 0 )dr 0 du 0
74 R l l+3 0Γ( 2 I l (u, R 0 ) = ) 2 l+3 π 3/2 (D(u)t) (l+3)/2 Γ(l + 3/2) 1 F 1 ( l ; l ; R2 0 4D(u)t ) 1 1F 1 (a, b, z) = t a 1 (1 t) b a 1 e zt dt 0 where 0 I l (u, R 0 )dr 0 = 1 Ĩ l D(u)t Ĩ l = Γ( l+1 2 ) 4lπ 3/2 Γ(l/2)
75 R l l+3 0Γ( 2 I l (u, R 0 ) = ) 2 l+3 π 3/2 (D(u)t) (l+3)/2 Γ(l + 3/2) 1 F 1 ( l ; l ; R2 0 4D(u)t ) 1 1F 1 (a, b, z) = t a 1 (1 t) b a 1 e zt dt 0 where 0 I l (u, R 0 )dr 0 = 1 Ĩ l D(u)t Ĩ l = Γ( l+1 2 ) 4lπ 3/2 Γ(l/2)
76 R l l+3 0Γ( 2 I l (u, R 0 ) = ) 2 l+3 π 3/2 (D(u)t) (l+3)/2 Γ(l + 3/2) 1 F 1 ( l ; l ; R2 0 4D(u)t ) 1 1F 1 (a, b, z) = t a 1 (1 t) b a 1 e zt dt 0 where 0 I l (u, R 0 )dr 0 = 1 Ĩ l D(u)t Ĩ l = Γ( l+1 2 ) 4lπ 3/2 Γ(l/2)
77 R l l+3 0Γ( 2 I l (u, R 0 ) = ) 2 l+3 π 3/2 (D(u)t) (l+3)/2 Γ(l + 3/2) 1 F 1 ( l ; l ; R2 0 4D(u)t ) 1 1F 1 (a, b, z) = t a 1 (1 t) b a 1 e zt dt 0 where 0 I l (u, R 0 )dr 0 = 1 Ĩ l D(u)t Ĩ l = Γ( l+1 2 ) 4lπ 3/2 Γ(l/2)
78 1 D(u)t = l,m α lm Y lm (u) ODF(g) = l,m ( 1) l/2 Ĩ l α lm Y lm (g)
79 1 D(u)t = l,m α lm Y lm (u) ODF(g) = l,m ( 1) l/2 Ĩ l α lm Y lm (g)
80 1 1. Fit Nth order tensor decomposition to D(u)t. This yields D i 1...i k for k = 0,... N. 2. Compute the ODF coefficients D i 1...i k ODF (t) = ( 1)k/2 Γ( k+1 2 ) 4kπ 3/2 Γ(k/2) e k(k+1)t D i 1...i k.
81 1 1. Fit Nth order tensor decomposition to D(u)t. This yields D i 1...i k for k = 0,... N. 2. Compute the ODF coefficients D i 1...i k ODF (t) = ( 1)k/2 Γ( k+1 2 ) 4kπ 3/2 Γ(k/2) e k(k+1)t D i 1...i k.
82 1 1. Fit Nth order tensor decomposition to D(u)t. This yields D i 1...i k for k = 0,... N. 2. Compute the ODF coefficients D i 1...i k ODF (t) = ( 1)k/2 Γ( k+1 2 ) 4kπ 3/2 Γ(k/2) e k(k+1)t D i 1...i k.
83 1 1. Fit Nth order tensor decomposition to D(u)t. This yields D i 1...i k for k = 0,... N. 2. Compute the ODF coefficients D i 1...i k ODF (t) = ( 1)k/2 Γ( k+1 2 ) 4kπ 3/2 Γ(k/2) e k(k+1)t D i 1...i k.

84 Hardware phantom
85 Synthetic data Multi-tensor model n S(g) = p k e bgt D k g k=1
86 Q-ball and DOT-ODF comparison S(g) = S 0 e bd(g) Squared difference 9 1e 7 ODF-based method validation, without numerical b-value

87 Tracking Riemannian metric Finsler metric.

88 Finsler Metric Riemannian metric Finsler metric.
89 Open Questions Voxel classification Scales selection Reality check
90 Open Questions Voxel classification Scales selection Reality check
91 Open Questions Voxel classification Scales selection Reality check
A DARK GREY P O N T, with a Switch Tail, and a small Star on the Forehead. Any
 Y Y Y X X «/ YY Y Y ««Y x ) & \ & & } # Y \#$& / Y Y X» \\ / X X X x & Y Y X «q «z \x» = q Y # % \ & [ & Z \ & { + % ) / / «q zy» / & / / / & x x X / % % ) Y x X Y $ Z % Y Y x x } / % «] «] # z» & Y X»
Y Y Y X X «/ YY Y Y ««Y x ) & \ & & } # Y \#$& / Y Y X» \\ / X X X x & Y Y X «q «z \x» = q Y # % \ & [ & Z \ & { + % ) / / «q zy» / & / / / & x x X / % % ) Y x X Y $ Z % Y Y x x } / % «] «] # z» & Y X»
Ordinary Least Squares and its applications
 Ordinary Least Squares and its applications Dr. Mauro Zucchelli University Of Verona December 5, 2016 Dr. Mauro Zucchelli Ordinary Least Squares and its applications December 5, 2016 1 / 48 Contents 1
Ordinary Least Squares and its applications Dr. Mauro Zucchelli University Of Verona December 5, 2016 Dr. Mauro Zucchelli Ordinary Least Squares and its applications December 5, 2016 1 / 48 Contents 1
Lecture 8 Analyzing the diffusion weighted signal. Room CSB 272 this week! Please install AFNI
 Lecture 8 Analyzing the diffusion weighted signal Room CSB 272 this week! Please install AFNI http://afni.nimh.nih.gov/afni/ Next lecture, DTI For this lecture, think in terms of a single voxel We re still
Lecture 8 Analyzing the diffusion weighted signal Room CSB 272 this week! Please install AFNI http://afni.nimh.nih.gov/afni/ Next lecture, DTI For this lecture, think in terms of a single voxel We re still
Decomposition of Higher-Order Homogeneous Tensors and Applications to HARDI
 Decomposition of Higher-Order Homogeneous Tensors and Applications to HARDI E. Balmashnova, A. Fuster and L.M.J. Florack Eindhoven University of Technology, The Netherlands E.Balmachnova@tue.nl Abstract.
Decomposition of Higher-Order Homogeneous Tensors and Applications to HARDI E. Balmashnova, A. Fuster and L.M.J. Florack Eindhoven University of Technology, The Netherlands E.Balmachnova@tue.nl Abstract.
LOWELL WEEKLY JOURNAL
 Y -» $ 5 Y 7 Y Y -Y- Q x Q» 75»»/ q } # ]»\ - - $ { Q» / X x»»- 3 q $ 9 ) Y q - 5 5 3 3 3 7 Q q - - Q _»»/Q Y - 9 - - - )- [ X 7» -» - )»? / /? Q Y»» # X Q» - -?» Q ) Q \ Q - - - 3? 7» -? #»»» 7 - / Q
Y -» $ 5 Y 7 Y Y -Y- Q x Q» 75»»/ q } # ]»\ - - $ { Q» / X x»»- 3 q $ 9 ) Y q - 5 5 3 3 3 7 Q q - - Q _»»/Q Y - 9 - - - )- [ X 7» -» - )»? / /? Q Y»» # X Q» - -?» Q ) Q \ Q - - - 3? 7» -? #»»» 7 - / Q
Neatest and Promptest Manner. E d i t u r ami rul)lihher. FOIt THE CIIILDIIES'. Trifles.
lihher. FOIt THE CIIILDIIES'. Trifles.") » ~ $ ) 7 x X ) / ( 8 2 X 39 ««x» ««! «! / x? \» «({? «» q «(? (?? x! «? 8? ( z x x q? ) «q q q ) x z x 69 7( X X ( 3»«! ( ~«x ««x ) (» «8 4 X «4 «4 «8 X «x «(» X) ()»» «X «97 X X X 4 ( 86) x) ( ) z z
» ~ $ ) 7 x X ) / ( 8 2 X 39 ««x» ««! «! / x? \» «({? «» q «(? (?? x! «? 8? ( z x x q? ) «q q q ) x z x 69 7( X X ( 3»«! ( ~«x ««x ) (» «8 4 X «4 «4 «8 X «x «(» X) ()»» «X «97 X X X 4 ( 86) x) ( ) z z
On the Blurring of the Funk Radon Transform in Q Ball Imaging
 On the Blurring of the Funk Radon Transform in Q Ball Imaging Antonio Tristán-Vega 1, Santiago Aja-Fernández 1, and Carl-Fredrik Westin 2 1 Laboratory of Image Processing, University of Valladolid, Spain
On the Blurring of the Funk Radon Transform in Q Ball Imaging Antonio Tristán-Vega 1, Santiago Aja-Fernández 1, and Carl-Fredrik Westin 2 1 Laboratory of Image Processing, University of Valladolid, Spain
Two Posts to Fill On School Board
 Y Y 9 86 4 4 qz 86 x : ( ) z 7 854 Y x 4 z z x x 4 87 88 Y 5 x q x 8 Y 8 x x : 6 ; : 5 x ; 4 ( z ; ( ) ) x ; z 94 ; x 3 3 3 5 94 ; ; ; ; 3 x : 5 89 q ; ; x ; x ; ; x : ; ; ; ; ; ; 87 47% : () : / : 83
Y Y 9 86 4 4 qz 86 x : ( ) z 7 854 Y x 4 z z x x 4 87 88 Y 5 x q x 8 Y 8 x x : 6 ; : 5 x ; 4 ( z ; ( ) ) x ; z 94 ; x 3 3 3 5 94 ; ; ; ; 3 x : 5 89 q ; ; x ; x ; ; x : ; ; ; ; ; ; 87 47% : () : / : 83
LOWELL JOURNAL. MUST APOLOGIZE. such communication with the shore as Is m i Boimhle, noewwary and proper for the comfort
 - 7 7 Z 8 q ) V x - X > q - < Y Y X V - z - - - - V - V - q \ - q q < -- V - - - x - - V q > x - x q - x q - x - - - 7 -» - - - - 6 q x - > - - x - - - x- - - q q - V - x - - ( Y q Y7 - >»> - x Y - ] [
- 7 7 Z 8 q ) V x - X > q - < Y Y X V - z - - - - V - V - q \ - q q < -- V - - - x - - V q > x - x q - x q - x - - - 7 -» - - - - 6 q x - > - - x - - - x- - - q q - V - x - - ( Y q Y7 - >»> - x Y - ] [
Jim Lambers MAT 280 Summer Semester Practice Final Exam Solution. dy + xz dz = x(t)y(t) dt. t 3 (4t 3 ) + e t2 (2t) + t 7 (3t 2 ) dt
y(t) dt. t 3 (4t 3 ) + e t2 (2t) + t 7 (3t 2 ) dt") Jim Lambers MAT 28 ummer emester 212-1 Practice Final Exam olution 1. Evaluate the line integral xy dx + e y dy + xz dz, where is given by r(t) t 4, t 2, t, t 1. olution From r (t) 4t, 2t, t 2, we obtain
Jim Lambers MAT 28 ummer emester 212-1 Practice Final Exam olution 1. Evaluate the line integral xy dx + e y dy + xz dz, where is given by r(t) t 4, t 2, t, t 1. olution From r (t) 4t, 2t, t 2, we obtain
Sec. 1.1: Basics of Vectors
 Sec. 1.1: Basics of Vectors Notation for Euclidean space R n : all points (x 1, x 2,..., x n ) in n-dimensional space. Examples: 1. R 1 : all points on the real number line. 2. R 2 : all points (x 1, x
Sec. 1.1: Basics of Vectors Notation for Euclidean space R n : all points (x 1, x 2,..., x n ) in n-dimensional space. Examples: 1. R 1 : all points on the real number line. 2. R 2 : all points (x 1, x
Closed-Form Solution Of Absolute Orientation Using Unit Quaternions
 Closed-Form Solution Of Absolute Orientation Using Unit Berthold K. P. Horn Department of Computer and Information Sciences November 11, 2004 Outline 1 Introduction 2 3 The Problem Given: two sets of corresponding
Closed-Form Solution Of Absolute Orientation Using Unit Berthold K. P. Horn Department of Computer and Information Sciences November 11, 2004 Outline 1 Introduction 2 3 The Problem Given: two sets of corresponding
Rigid body simulation. Once we consider an object with spatial extent, particle system simulation is no longer sufficient
 Rigid body dynamics Rigid body simulation Once we consider an object with spatial extent, particle system simulation is no longer sufficient Rigid body simulation Unconstrained system no contact Constrained
Rigid body dynamics Rigid body simulation Once we consider an object with spatial extent, particle system simulation is no longer sufficient Rigid body simulation Unconstrained system no contact Constrained
Rotational Motion. Chapter 4. P. J. Grandinetti. Sep. 1, Chem P. J. Grandinetti (Chem. 4300) Rotational Motion Sep.
 Rotational Motion Sep.") Rotational Motion Chapter 4 P. J. Grandinetti Chem. 4300 Sep. 1, 2017 P. J. Grandinetti (Chem. 4300) Rotational Motion Sep. 1, 2017 1 / 76 Angular Momentum The angular momentum of a particle with respect
Rotational Motion Chapter 4 P. J. Grandinetti Chem. 4300 Sep. 1, 2017 P. J. Grandinetti (Chem. 4300) Rotational Motion Sep. 1, 2017 1 / 76 Angular Momentum The angular momentum of a particle with respect
General Physics I. Lecture 10: Rolling Motion and Angular Momentum.
 General Physics I Lecture 10: Rolling Motion and Angular Momentum Prof. WAN, Xin (万歆) 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Rolling motion of a rigid object: center-of-mass motion
General Physics I Lecture 10: Rolling Motion and Angular Momentum Prof. WAN, Xin (万歆) 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Rolling motion of a rigid object: center-of-mass motion
M E 320 Professor John M. Cimbala Lecture 10
 M E 320 Professor John M. Cimbala Lecture 10 Today, we will: Finish our example problem rates of motion and deformation of fluid particles Discuss the Reynolds Transport Theorem (RTT) Show how the RTT
M E 320 Professor John M. Cimbala Lecture 10 Today, we will: Finish our example problem rates of motion and deformation of fluid particles Discuss the Reynolds Transport Theorem (RTT) Show how the RTT
' Liberty and Umou Ono and Inseparablo "
 3 5? #< q 8 2 / / ) 9 ) 2 ) > < _ / ] > ) 2 ) ) 5 > x > [ < > < ) > _ ] ]? <
3 5? #< q 8 2 / / ) 9 ) 2 ) > < _ / ] > ) 2 ) ) 5 > x > [ < > < ) > _ ] ]? <
Tensor Visualization. CSC 7443: Scientific Information Visualization
 Tensor Visualization Tensor data A tensor is a multivariate quantity Scalar is a tensor of rank zero s = s(x,y,z) Vector is a tensor of rank one v = (v x,v y,v z ) For a symmetric tensor of rank 2, its
Tensor Visualization Tensor data A tensor is a multivariate quantity Scalar is a tensor of rank zero s = s(x,y,z) Vector is a tensor of rank one v = (v x,v y,v z ) For a symmetric tensor of rank 2, its
Wavelet Frames on the Sphere for Sparse Representations in High Angular Resolution Diusion Imaging. Chen Weiqiang
 Wavelet Frames on the Sphere for Sparse Representations in High Angular Resolution Diusion Imaging Chen Weiqiang Overview 1. Introduction to High Angular Resolution Diusion Imaging (HARDI). 2. Wavelets
Wavelet Frames on the Sphere for Sparse Representations in High Angular Resolution Diusion Imaging Chen Weiqiang Overview 1. Introduction to High Angular Resolution Diusion Imaging (HARDI). 2. Wavelets
 «4 [< «
«4 [< « MECH 5312 Solid Mechanics II. Dr. Calvin M. Stewart Department of Mechanical Engineering The University of Texas at El Paso
 MECH 5312 Solid Mechanics II Dr. Calvin M. Stewart Department of Mechanical Engineering The University of Texas at El Paso Table of Contents Preliminary Math Concept of Stress Stress Components Equilibrium
MECH 5312 Solid Mechanics II Dr. Calvin M. Stewart Department of Mechanical Engineering The University of Texas at El Paso Table of Contents Preliminary Math Concept of Stress Stress Components Equilibrium
MANY BILLS OF CONCERN TO PUBLIC
 - 6 8 9-6 8 9 6 9 XXX 4 > -? - 8 9 x 4 z ) - -! x - x - - X - - - - - x 00 - - - - - x z - - - x x - x - - - - - ) x - - - - - - 0 > - 000-90 - - 4 0 x 00 - -? z 8 & x - - 8? > 9 - - - - 64 49 9 x - -
- 6 8 9-6 8 9 6 9 XXX 4 > -? - 8 9 x 4 z ) - -! x - x - - X - - - - - x 00 - - - - - x z - - - x x - x - - - - - ) x - - - - - - 0 > - 000-90 - - 4 0 x 00 - -? z 8 & x - - 8? > 9 - - - - 64 49 9 x - -
Crew of25 Men Start Monday On Showboat. Many Permanent Improvements To Be Made;Project Under WPA
 U G G G U 2 93 YX Y q 25 3 < : z? 0 (? 8 0 G 936 x z x z? \ 9 7500 00? 5 q 938 27? 60 & 69? 937 q? G x? 937 69 58 } x? 88 G # x 8 > x G 0 G 0 x 8 x 0 U 93 6 ( 2 x : X 7 8 G G G q x U> x 0 > x < x G U 5
U G G G U 2 93 YX Y q 25 3 < : z? 0 (? 8 0 G 936 x z x z? \ 9 7500 00? 5 q 938 27? 60 & 69? 937 q? G x? 937 69 58 } x? 88 G # x 8 > x G 0 G 0 x 8 x 0 U 93 6 ( 2 x : X 7 8 G G G q x U> x 0 > x < x G U 5
OWELL WEEKLY JOURNAL
 Y \»< - } Y Y Y & #»»» q ] q»»»>) & - - - } ) x ( - { Y» & ( x - (» & )< - Y X - & Q Q» 3 - x Q Y 6 \Y > Y Y X 3 3-9 33 x - - / - -»- --
Y \»< - } Y Y Y & #»»» q ] q»»»>) & - - - } ) x ( - { Y» & ( x - (» & )< - Y X - & Q Q» 3 - x Q Y 6 \Y > Y Y X 3 3-9 33 x - - / - -»- --
Fast and Accurate HARDI and its Application to Neurological Diagnosis
 Fast and Accurate HARDI and its Application to Neurological Diagnosis Dr. Oleg Michailovich Department of Electrical and Computer Engineering University of Waterloo June 21, 2011 Outline 1 Diffusion imaging
Fast and Accurate HARDI and its Application to Neurological Diagnosis Dr. Oleg Michailovich Department of Electrical and Computer Engineering University of Waterloo June 21, 2011 Outline 1 Diffusion imaging
A Novel Tensor Distribution Model for the Diffusion Weighted MR Signal
 A Novel Tensor Distribution Model for the Diffusion Weighted MR Signal Baba C. UFRF Professor & Director Center for Vision, Graphics, and Medical Imaging Department of Computer & Information Science and
A Novel Tensor Distribution Model for the Diffusion Weighted MR Signal Baba C. UFRF Professor & Director Center for Vision, Graphics, and Medical Imaging Department of Computer & Information Science and
6. 3D Kinematics DE2-EA 2.1: M4DE. Dr Connor Myant
 DE2-EA 2.1: M4DE Dr Connor Myant 6. 3D Kinematics Comments and corrections to connor.myant@imperial.ac.uk Lecture resources may be found on Blackboard and at http://connormyant.com Contents Three-Dimensional
DE2-EA 2.1: M4DE Dr Connor Myant 6. 3D Kinematics Comments and corrections to connor.myant@imperial.ac.uk Lecture resources may be found on Blackboard and at http://connormyant.com Contents Three-Dimensional
Lesson Rigid Body Dynamics
 Lesson 8 Rigid Body Dynamics Lesson 8 Outline Problem definition and motivations Dynamics of rigid bodies The equation of unconstrained motion (ODE) User and time control Demos / tools / libs Rigid Body
Lesson 8 Rigid Body Dynamics Lesson 8 Outline Problem definition and motivations Dynamics of rigid bodies The equation of unconstrained motion (ODE) User and time control Demos / tools / libs Rigid Body
OCN/ATM/ESS 587. The wind-driven ocean circulation. Friction and stress. The Ekman layer, top and bottom. Ekman pumping, Ekman suction
 OCN/ATM/ESS 587 The wind-driven ocean circulation. Friction and stress The Ekman layer, top and bottom Ekman pumping, Ekman suction Westward intensification The wind-driven ocean. The major ocean gyres
OCN/ATM/ESS 587 The wind-driven ocean circulation. Friction and stress The Ekman layer, top and bottom Ekman pumping, Ekman suction Westward intensification The wind-driven ocean. The major ocean gyres
Rock Rheology GEOL 5700 Physics and Chemistry of the Solid Earth
 Rock Rheology GEOL 5700 Physics and Chemistry of the Solid Earth References: Turcotte and Schubert, Geodynamics, Sections 2.1,-2.4, 2.7, 3.1-3.8, 6.1, 6.2, 6.8, 7.1-7.4. Jaeger and Cook, Fundamentals of
Rock Rheology GEOL 5700 Physics and Chemistry of the Solid Earth References: Turcotte and Schubert, Geodynamics, Sections 2.1,-2.4, 2.7, 3.1-3.8, 6.1, 6.2, 6.8, 7.1-7.4. Jaeger and Cook, Fundamentals of
Chapter 5. The Differential Forms of the Fundamental Laws
 Chapter 5 The Differential Forms of the Fundamental Laws 1 5.1 Introduction Two primary methods in deriving the differential forms of fundamental laws: Gauss s Theorem: Allows area integrals of the equations
Chapter 5 The Differential Forms of the Fundamental Laws 1 5.1 Introduction Two primary methods in deriving the differential forms of fundamental laws: Gauss s Theorem: Allows area integrals of the equations
AE/ME 339. K. M. Isaac Professor of Aerospace Engineering. 12/21/01 topic7_ns_equations 1
 AE/ME 339 Professor of Aerospace Engineering 12/21/01 topic7_ns_equations 1 Continuity equation Governing equation summary Non-conservation form D Dt. V 0.(2.29) Conservation form ( V ) 0...(2.33) t 12/21/01
AE/ME 339 Professor of Aerospace Engineering 12/21/01 topic7_ns_equations 1 Continuity equation Governing equation summary Non-conservation form D Dt. V 0.(2.29) Conservation form ( V ) 0...(2.33) t 12/21/01
PEAT SEISMOLOGY Lecture 2: Continuum mechanics
 PEAT8002 - SEISMOLOGY Lecture 2: Continuum mechanics Nick Rawlinson Research School of Earth Sciences Australian National University Strain Strain is the formal description of the change in shape of a
PEAT8002 - SEISMOLOGY Lecture 2: Continuum mechanics Nick Rawlinson Research School of Earth Sciences Australian National University Strain Strain is the formal description of the change in shape of a
Finsler Geometry on Higher Order Tensor Fields and Applications to High Angular Resolution Diffusion Imaging
 Int J Comput Vis (2011) 92: 325 336 DOI 101007/s11263-010-0377-z Finsler Geometry on Higher Order Tensor Fields and Applications to High Angular Resolution Diffusion Imaging Laura Astola Luc Florack Published
Int J Comput Vis (2011) 92: 325 336 DOI 101007/s11263-010-0377-z Finsler Geometry on Higher Order Tensor Fields and Applications to High Angular Resolution Diffusion Imaging Laura Astola Luc Florack Published
A. H. Hall, 33, 35 &37, Lendoi
 7 X x > - z Z - ----»»x - % x x» [> Q - ) < % - - 7»- -Q 9 Q # 5 - z -> Q x > z»- ~» - x " < z Q q»» > X»? Q ~ - - % % < - < - - 7 - x -X - -- 6 97 9
7 X x > - z Z - ----»»x - % x x» [> Q - ) < % - - 7»- -Q 9 Q # 5 - z -> Q x > z»- ~» - x " < z Q q»» > X»? Q ~ - - % % < - < - - 7 - x -X - -- 6 97 9
Diffusion Tensor Imaging (DTI): An overview of key concepts
: An overview of key concepts") Diffusion Tensor Imaging (DTI): An overview of key concepts (Supplemental material for presentation) Prepared by: Nadia Barakat BMB 601 Chris Conklin Thursday, April 8 th 2010 Diffusion Concept [1,2]:
Diffusion Tensor Imaging (DTI): An overview of key concepts (Supplemental material for presentation) Prepared by: Nadia Barakat BMB 601 Chris Conklin Thursday, April 8 th 2010 Diffusion Concept [1,2]:
Unit IV State of stress in Three Dimensions
 Unit IV State of stress in Three Dimensions State of stress in Three Dimensions References Punmia B.C.,"Theory of Structures" (SMTS) Vol II, Laxmi Publishing Pvt Ltd, New Delhi 2004. Rattan.S.S., "Strength
Unit IV State of stress in Three Dimensions State of stress in Three Dimensions References Punmia B.C.,"Theory of Structures" (SMTS) Vol II, Laxmi Publishing Pvt Ltd, New Delhi 2004. Rattan.S.S., "Strength
Uniformity of the Universe
 Outline Universe is homogenous and isotropic Spacetime metrics Friedmann-Walker-Robertson metric Number of numbers needed to specify a physical quantity. Energy-momentum tensor Energy-momentum tensor of
Outline Universe is homogenous and isotropic Spacetime metrics Friedmann-Walker-Robertson metric Number of numbers needed to specify a physical quantity. Energy-momentum tensor Energy-momentum tensor of
14.7: Maxima and Minima
 14.7: Maxima and Minima Marius Ionescu October 29, 2012 Marius Ionescu () 14.7: Maxima and Minima October 29, 2012 1 / 13 Local Maximum and Local Minimum Denition Marius Ionescu () 14.7: Maxima and Minima
14.7: Maxima and Minima Marius Ionescu October 29, 2012 Marius Ionescu () 14.7: Maxima and Minima October 29, 2012 1 / 13 Local Maximum and Local Minimum Denition Marius Ionescu () 14.7: Maxima and Minima
Rotational & Rigid-Body Mechanics. Lectures 3+4
 Rotational & Rigid-Body Mechanics Lectures 3+4 Rotational Motion So far: point objects moving through a trajectory. Next: moving actual dimensional objects and rotating them. 2 Circular Motion - Definitions
Rotational & Rigid-Body Mechanics Lectures 3+4 Rotational Motion So far: point objects moving through a trajectory. Next: moving actual dimensional objects and rotating them. 2 Circular Motion - Definitions
1/30. Rigid Body Rotations. Dave Frank
 . 1/3 Rigid Body Rotations Dave Frank A Point Particle and Fundamental Quantities z 2/3 m v ω r y x Angular Velocity v = dr dt = ω r Kinetic Energy K = 1 2 mv2 Momentum p = mv Rigid Bodies We treat a rigid
. 1/3 Rigid Body Rotations Dave Frank A Point Particle and Fundamental Quantities z 2/3 m v ω r y x Angular Velocity v = dr dt = ω r Kinetic Energy K = 1 2 mv2 Momentum p = mv Rigid Bodies We treat a rigid
Homogenization Methods for Full Core Solution of the Pn Transport Equations with 3-D Cross Sections. Andrew Hall October 16, 2015
 Homogenization Methods for Full Core Solution of the Pn Transport Equations with 3-D Cross Sections Andrew Hall October 16, 2015 Outline Resource-Renewable Boiling Water Reactor (RBWR) Current Neutron
Homogenization Methods for Full Core Solution of the Pn Transport Equations with 3-D Cross Sections Andrew Hall October 16, 2015 Outline Resource-Renewable Boiling Water Reactor (RBWR) Current Neutron
Homework 1/Solutions. Graded Exercises
 MTH 310-3 Abstract Algebra I and Number Theory S18 Homework 1/Solutions Graded Exercises Exercise 1. Below are parts of the addition table and parts of the multiplication table of a ring. Complete both
MTH 310-3 Abstract Algebra I and Number Theory S18 Homework 1/Solutions Graded Exercises Exercise 1. Below are parts of the addition table and parts of the multiplication table of a ring. Complete both
12. Stresses and Strains
 12. Stresses and Strains Finite Element Method Differential Equation Weak Formulation Approximating Functions Weighted Residuals FEM - Formulation Classification of Problems Scalar Vector 1-D T(x) u(x)
12. Stresses and Strains Finite Element Method Differential Equation Weak Formulation Approximating Functions Weighted Residuals FEM - Formulation Classification of Problems Scalar Vector 1-D T(x) u(x)
Rigid body dynamics. Basilio Bona. DAUIN - Politecnico di Torino. October 2013
 Rigid body dynamics Basilio Bona DAUIN - Politecnico di Torino October 2013 Basilio Bona (DAUIN - Politecnico di Torino) Rigid body dynamics October 2013 1 / 16 Multiple point-mass bodies Each mass is
Rigid body dynamics Basilio Bona DAUIN - Politecnico di Torino October 2013 Basilio Bona (DAUIN - Politecnico di Torino) Rigid body dynamics October 2013 1 / 16 Multiple point-mass bodies Each mass is
Course 2BA1: Hilary Term 2007 Section 8: Quaternions and Rotations
 Course BA1: Hilary Term 007 Section 8: Quaternions and Rotations David R. Wilkins Copyright c David R. Wilkins 005 Contents 8 Quaternions and Rotations 1 8.1 Quaternions............................ 1 8.
Course BA1: Hilary Term 007 Section 8: Quaternions and Rotations David R. Wilkins Copyright c David R. Wilkins 005 Contents 8 Quaternions and Rotations 1 8.1 Quaternions............................ 1 8.
Generalizing Diffusion Tensor Model Using Probabilistic Inference in Markov Random Fields
 Generalizing Diffusion Tensor Model Using Probabilistic Inference in Markov Random Fields Çağatay Demiralp and David H. Laidlaw Brown University Providence, RI, USA Abstract. We give a proof of concept
Generalizing Diffusion Tensor Model Using Probabilistic Inference in Markov Random Fields Çağatay Demiralp and David H. Laidlaw Brown University Providence, RI, USA Abstract. We give a proof of concept
General Relativity ASTR 2110 Sarazin. Einstein s Equation
 General Relativity ASTR 2110 Sarazin Einstein s Equation Curvature of Spacetime 1. Principle of Equvalence: gravity acceleration locally 2. Acceleration curved path in spacetime In gravitational field,
General Relativity ASTR 2110 Sarazin Einstein s Equation Curvature of Spacetime 1. Principle of Equvalence: gravity acceleration locally 2. Acceleration curved path in spacetime In gravitational field,
FMIA. Fluid Mechanics and Its Applications 113 Series Editor: A. Thess. Moukalled Mangani Darwish. F. Moukalled L. Mangani M.
 FMIA F. Moukalled L. Mangani M. Darwish An Advanced Introduction with OpenFOAM and Matlab This textbook explores both the theoretical foundation of the Finite Volume Method (FVM) and its applications in
FMIA F. Moukalled L. Mangani M. Darwish An Advanced Introduction with OpenFOAM and Matlab This textbook explores both the theoretical foundation of the Finite Volume Method (FVM) and its applications in
GG303 Lecture 6 8/27/09 1 SCALARS, VECTORS, AND TENSORS
 GG303 Lecture 6 8/27/09 1 SCALARS, VECTORS, AND TENSORS I Main Topics A Why deal with tensors? B Order of scalars, vectors, and tensors C Linear transformation of scalars and vectors (and tensors) II Why
GG303 Lecture 6 8/27/09 1 SCALARS, VECTORS, AND TENSORS I Main Topics A Why deal with tensors? B Order of scalars, vectors, and tensors C Linear transformation of scalars and vectors (and tensors) II Why
Diffusion Tensor Imaging tutorial
 NA-MIC http://na-mic.org Diffusion Tensor Imaging tutorial Sonia Pujol, PhD Surgical Planning Laboratory Harvard University DTI tutorial This tutorial is an introduction to the advanced Diffusion MR capabilities
NA-MIC http://na-mic.org Diffusion Tensor Imaging tutorial Sonia Pujol, PhD Surgical Planning Laboratory Harvard University DTI tutorial This tutorial is an introduction to the advanced Diffusion MR capabilities
LOWELL WEEKLY JOURNAL.
 Y $ Y Y 7 27 Y 2» x 7»» 2» q» ~ [ } q q $ $ 6 2 2 2 2 2 2 7 q > Y» Y >» / Y» ) Y» < Y»» _»» < Y > Y Y < )»» >» > ) >» >> >Y x x )»» > Y Y >>»» }> ) Y < >» /» Y x» > / x /»»»»» >» >» >»» > > >» < Y /~ >
Y $ Y Y 7 27 Y 2» x 7»» 2» q» ~ [ } q q $ $ 6 2 2 2 2 2 2 7 q > Y» Y >» / Y» ) Y» < Y»» _»» < Y > Y Y < )»» >» > ) >» >> >Y x x )»» > Y Y >>»» }> ) Y < >» /» Y x» > / x /»»»»» >» >» >»» > > >» < Y /~ >
Q SON,' (ESTABLISHED 1879L
 ( < 5(? Q 5 9 7 00 9 0 < 6 z 97 ( # ) $ x 6 < ( ) ( ( 6( ( ) ( $ z 0 z z 0 ) { ( % 69% ( ) x 7 97 z ) 7 ) ( ) 6 0 0 97 )( 0 x 7 97 5 6 ( ) 0 6 ) 5 ) 0 ) 9%5 z» 0 97 «6 6» 96? 0 96 5 0 ( ) ( ) 0 x 6 0
( < 5(? Q 5 9 7 00 9 0 < 6 z 97 ( # ) $ x 6 < ( ) ( ( 6( ( ) ( $ z 0 z z 0 ) { ( % 69% ( ) x 7 97 z ) 7 ) ( ) 6 0 0 97 )( 0 x 7 97 5 6 ( ) 0 6 ) 5 ) 0 ) 9%5 z» 0 97 «6 6» 96? 0 96 5 0 ( ) ( ) 0 x 6 0
Getting started: CFD notation
 PDE of p-th order Getting started: CFD notation f ( u,x, t, u x 1,..., u x n, u, 2 u x 1 x 2,..., p u p ) = 0 scalar unknowns u = u(x, t), x R n, t R, n = 1,2,3 vector unknowns v = v(x, t), v R m, m =
PDE of p-th order Getting started: CFD notation f ( u,x, t, u x 1,..., u x n, u, 2 u x 1 x 2,..., p u p ) = 0 scalar unknowns u = u(x, t), x R n, t R, n = 1,2,3 vector unknowns v = v(x, t), v R m, m =
Approach Curve COMSOL Report File
 Approach Curve COMSOL Report File Contents 1. Global Definitions 1.1. Parameters 1 2. Model 1 (mod1) 2.1. Definitions 2.2. Geometry 1 2.3. Transport of Diluted Species (chds) 2.4. Mesh 1 3. Study 1 3.1.
Approach Curve COMSOL Report File Contents 1. Global Definitions 1.1. Parameters 1 2. Model 1 (mod1) 2.1. Definitions 2.2. Geometry 1 2.3. Transport of Diluted Species (chds) 2.4. Mesh 1 3. Study 1 3.1.
Introduction to Fluid Mechanics
 Introduction to Fluid Mechanics Tien-Tsan Shieh April 16, 2009 What is a Fluid? The key distinction between a fluid and a solid lies in the mode of resistance to change of shape. The fluid, unlike the
Introduction to Fluid Mechanics Tien-Tsan Shieh April 16, 2009 What is a Fluid? The key distinction between a fluid and a solid lies in the mode of resistance to change of shape. The fluid, unlike the
AB-267 DYNAMICS & CONTROL OF FLEXIBLE AIRCRAFT
 FLÁIO SILESTRE DYNAMICS & CONTROL OF FLEXIBLE AIRCRAFT LECTURE NOTES LAGRANGIAN MECHANICS APPLIED TO RIGID-BODY DYNAMICS IMAGE CREDITS: BOEING FLÁIO SILESTRE Introduction Lagrangian Mechanics shall be
FLÁIO SILESTRE DYNAMICS & CONTROL OF FLEXIBLE AIRCRAFT LECTURE NOTES LAGRANGIAN MECHANICS APPLIED TO RIGID-BODY DYNAMICS IMAGE CREDITS: BOEING FLÁIO SILESTRE Introduction Lagrangian Mechanics shall be
Numerical Implementation of Transformation Optics
 ECE 5322 21 st Century Electromagnetics Instructor: Office: Phone: E Mail: Dr. Raymond C. Rumpf A 337 (915) 747 6958 rcrumpf@utep.edu Lecture #16b Numerical Implementation of Transformation Optics Lecture
ECE 5322 21 st Century Electromagnetics Instructor: Office: Phone: E Mail: Dr. Raymond C. Rumpf A 337 (915) 747 6958 rcrumpf@utep.edu Lecture #16b Numerical Implementation of Transformation Optics Lecture
7a3 2. (c) πa 3 (d) πa 3 (e) πa3
 πa 3 (d) πa 3 (e) πa3") 1.(6pts) Find the integral x, y, z d S where H is the part of the upper hemisphere of H x 2 + y 2 + z 2 = a 2 above the plane z = a and the normal points up. ( 2 π ) Useful Facts: cos = 1 and ds = ±a sin
1.(6pts) Find the integral x, y, z d S where H is the part of the upper hemisphere of H x 2 + y 2 + z 2 = a 2 above the plane z = a and the normal points up. ( 2 π ) Useful Facts: cos = 1 and ds = ±a sin
Higher Order Cartesian Tensor Representation of Orientation Distribution Functions (ODFs)
") Higher Order Cartesian Tensor Representation of Orientation Distribution Functions (ODFs) Yonas T. Weldeselassie (Ph.D. Candidate) Medical Image Computing and Analysis Lab, CS, SFU DT-MR Imaging Introduction
Higher Order Cartesian Tensor Representation of Orientation Distribution Functions (ODFs) Yonas T. Weldeselassie (Ph.D. Candidate) Medical Image Computing and Analysis Lab, CS, SFU DT-MR Imaging Introduction
Chapter 1 Fluid Characteristics
 Chapter 1 Fluid Characteristics 1.1 Introduction 1.1.1 Phases Solid increasing increasing spacing and intermolecular liquid latitude of cohesive Fluid gas (vapor) molecular force plasma motion 1.1.2 Fluidity
Chapter 1 Fluid Characteristics 1.1 Introduction 1.1.1 Phases Solid increasing increasing spacing and intermolecular liquid latitude of cohesive Fluid gas (vapor) molecular force plasma motion 1.1.2 Fluidity
In this section, mathematical description of the motion of fluid elements moving in a flow field is
 Jun. 05, 015 Chapter 6. Differential Analysis of Fluid Flow 6.1 Fluid Element Kinematics In this section, mathematical description of the motion of fluid elements moving in a flow field is given. A small
Jun. 05, 015 Chapter 6. Differential Analysis of Fluid Flow 6.1 Fluid Element Kinematics In this section, mathematical description of the motion of fluid elements moving in a flow field is given. A small
Projectively Flat Fourth Root Finsler Metrics
 Projectively Flat Fourth Root Finsler Metrics Benling Li and Zhongmin Shen 1 Introduction One of important problems in Finsler geometry is to study the geometric properties of locally projectively flat
Projectively Flat Fourth Root Finsler Metrics Benling Li and Zhongmin Shen 1 Introduction One of important problems in Finsler geometry is to study the geometric properties of locally projectively flat
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik. Robot Dynamics. Dr.-Ing. John Nassour J.
 Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Classical Mechanics. Luis Anchordoqui
 1 Rigid Body Motion Inertia Tensor Rotational Kinetic Energy Principal Axes of Rotation Steiner s Theorem Euler s Equations for a Rigid Body Eulerian Angles Review of Fundamental Equations 2 Rigid body
1 Rigid Body Motion Inertia Tensor Rotational Kinetic Energy Principal Axes of Rotation Steiner s Theorem Euler s Equations for a Rigid Body Eulerian Angles Review of Fundamental Equations 2 Rigid body
This sample exam is longer than the actual exam will be. Many of the sample exam problems are similar to those of the actual exam. = m a. I xx.
 Phys 326 Sample Final Exam SOLUTION 8-11 am 18 December 2012 144 Loomis Closed book, no calculators, but you are permitted one two-sided 8 1/2 x 11" set of notes. This sample exam is longer than the actual
Phys 326 Sample Final Exam SOLUTION 8-11 am 18 December 2012 144 Loomis Closed book, no calculators, but you are permitted one two-sided 8 1/2 x 11" set of notes. This sample exam is longer than the actual
ACCEPTS HUGE FLORAL KEY TO LOWELL. Mrs, Walter Laid to Rest Yesterday
 $ j < < < > XXX Y 928 23 Y Y 4% Y 6 -- Q 5 9 2 5 Z 48 25 )»-- [ Y Y Y & 4 j q - Y & Y 7 - -- - j \ -2 -- j j -2 - - - - [ - - / - ) ) - - / j Y 72 - ) 85 88 - / X - j ) \ 7 9 Y Y 2 3» - ««> Y 2 5 35 Y
$ j < < < > XXX Y 928 23 Y Y 4% Y 6 -- Q 5 9 2 5 Z 48 25 )»-- [ Y Y Y & 4 j q - Y & Y 7 - -- - j \ -2 -- j j -2 - - - - [ - - / - ) ) - - / j Y 72 - ) 85 88 - / X - j ) \ 7 9 Y Y 2 3» - ««> Y 2 5 35 Y
Metric tensors for homogeneous, isotropic, 5-dimensional pseudo Riemannian models
 Revista Colombiana de Matematicas Volumen 32 (1998), paginas 79-79 Metric tensors for homogeneous, isotropic, 5-dimensional pseudo Riemannian models LUIS A. ANCHORDOQUI Universidad Nacional de La Plata
Revista Colombiana de Matematicas Volumen 32 (1998), paginas 79-79 Metric tensors for homogeneous, isotropic, 5-dimensional pseudo Riemannian models LUIS A. ANCHORDOQUI Universidad Nacional de La Plata
Modelling ice shelf basal melt with Glimmer-CISM coupled to a meltwater plume model
 Modelling ice shelf basal melt with Glimmer-CISM coupled to a meltwater plume model Carl Gladish NYU CIMS February 17, 2010 Carl Gladish (NYU CIMS) Glimmer-CISM + Plume February 17, 2010 1 / 24 Acknowledgements
Modelling ice shelf basal melt with Glimmer-CISM coupled to a meltwater plume model Carl Gladish NYU CIMS February 17, 2010 Carl Gladish (NYU CIMS) Glimmer-CISM + Plume February 17, 2010 1 / 24 Acknowledgements
Numerical Modelling in Geosciences. Lecture 6 Deformation
 Numerical Modelling in Geosciences Lecture 6 Deformation Tensor Second-rank tensor stress ), strain ), strain rate ) Invariants quantities independent of the coordinate system): - First invariant trace:!!
Numerical Modelling in Geosciences Lecture 6 Deformation Tensor Second-rank tensor stress ), strain ), strain rate ) Invariants quantities independent of the coordinate system): - First invariant trace:!!
LOWELL WEEKLY JOURNAL
 Y G y G Y 87 y Y 8 Y - $ X ; ; y y q 8 y $8 $ $ $ G 8 q < 8 6 4 y 8 7 4 8 8 < < y 6 $ q - - y G y G - Y y y 8 y y y Y Y 7-7- G - y y y ) y - y y y y - - y - y 87 7-7- G G < G y G y y 6 X y G y y y 87 G
Y G y G Y 87 y Y 8 Y - $ X ; ; y y q 8 y $8 $ $ $ G 8 q < 8 6 4 y 8 7 4 8 8 < < y 6 $ q - - y G y G - Y y y 8 y y y Y Y 7-7- G - y y y ) y - y y y y - - y - y 87 7-7- G G < G y G y y 6 X y G y y y 87 G
Algebraic Expressions
 Algebraic Expressions 1. Expressions are formed from variables and constants. 2. Terms are added to form expressions. Terms themselves are formed as product of factors. 3. Expressions that contain exactly
Algebraic Expressions 1. Expressions are formed from variables and constants. 2. Terms are added to form expressions. Terms themselves are formed as product of factors. 3. Expressions that contain exactly
CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS. Prof. N. Harnew University of Oxford TT 2017
 CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS Prof. N. Harnew University of Oxford TT 2017 1 OUTLINE : CP1 REVISION LECTURE 3 : INTRODUCTION TO CLASSICAL MECHANICS 1. Angular velocity and
CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS Prof. N. Harnew University of Oxford TT 2017 1 OUTLINE : CP1 REVISION LECTURE 3 : INTRODUCTION TO CLASSICAL MECHANICS 1. Angular velocity and
PEAT SEISMOLOGY Lecture 12: Earthquake source mechanisms and radiation patterns II
 PEAT8002 - SEISMOLOGY Lecture 12: Earthquake source mechanisms and radiation patterns II Nick Rawlinson Research School of Earth Sciences Australian National University Waveform modelling P-wave first-motions
PEAT8002 - SEISMOLOGY Lecture 12: Earthquake source mechanisms and radiation patterns II Nick Rawlinson Research School of Earth Sciences Australian National University Waveform modelling P-wave first-motions
Math Review: Vectors and Tensors for Rheological Applications
 Math Review: Vectors and Tensors for Rheological Applications Presented by Randy H. Ewoldt University of Illinois at Urbana-Champaign U. of Minnesota Rheological Measurements Short Course June 2016 MathReview-1
Math Review: Vectors and Tensors for Rheological Applications Presented by Randy H. Ewoldt University of Illinois at Urbana-Champaign U. of Minnesota Rheological Measurements Short Course June 2016 MathReview-1
MATH 31BH Homework 5 Solutions
 MATH 3BH Homework 5 Solutions February 4, 204 Problem.8.2 (a) Let x t f y = x 2 + y 2 + 2z 2 and g(t) = t 2. z t 3 Then by the chain rule a a a D(g f) b = Dg f b Df b c c c = [Dg(a 2 + b 2 + 2c 2 )] [
MATH 3BH Homework 5 Solutions February 4, 204 Problem.8.2 (a) Let x t f y = x 2 + y 2 + 2z 2 and g(t) = t 2. z t 3 Then by the chain rule a a a D(g f) b = Dg f b Df b c c c = [Dg(a 2 + b 2 + 2c 2 )] [
A Riemannian Framework for Denoising Diffusion Tensor Images
 A Riemannian Framework for Denoising Diffusion Tensor Images Manasi Datar No Institute Given Abstract. Diffusion Tensor Imaging (DTI) is a relatively new imaging modality that has been extensively used
A Riemannian Framework for Denoising Diffusion Tensor Images Manasi Datar No Institute Given Abstract. Diffusion Tensor Imaging (DTI) is a relatively new imaging modality that has been extensively used
Basic Equations of Elasticity
 A Basic Equations of Elasticity A.1 STRESS The state of stress at any point in a loaded bo is defined completely in terms of the nine components of stress: σ xx,σ yy,σ zz,σ xy,σ yx,σ yz,σ zy,σ zx,andσ
A Basic Equations of Elasticity A.1 STRESS The state of stress at any point in a loaded bo is defined completely in terms of the nine components of stress: σ xx,σ yy,σ zz,σ xy,σ yx,σ yz,σ zy,σ zx,andσ
L bor y nnd Union One nnd Inseparable. LOW I'LL, MICHIGAN. WLDNHSDA Y. JULY ), I8T. liuwkll NATIdiNAI, liank
, I8T. liuwkll NATIdiNAI, liank") G k y $5 y / >/ k «««# ) /% < # «/» Y»««««?# «< >«>» y k»» «k F 5 8 Y Y F G k F >«y y
G k y $5 y / >/ k «««# ) /% < # «/» Y»««««?# «< >«>» y k»» «k F 5 8 Y Y F G k F >«y y
P A L A C E P IE R, S T. L E O N A R D S. R a n n o w, q u a r r y. W WALTER CR O TC H, Esq., Local Chairman. E. CO O PER EVANS, Esq.,.
 ? ( # [ ( 8? [ > 3 Q [ ««> » 9 Q { «33 Q> 8 \ \ 3 3 3> Q»«9 Q ««« 3 8 3 8 X \ [ 3 ( ( Z ( Z 3( 9 9 > < < > >? 8 98 ««3 ( 98 < # # Q 3 98? 98 > > 3 8 9 9 ««««> 3 «>
? ( # [ ( 8? [ > 3 Q [ ««> » 9 Q { «33 Q> 8 \ \ 3 3 3> Q»«9 Q ««« 3 8 3 8 X \ [ 3 ( ( Z ( Z 3( 9 9 > < < > >? 8 98 ««3 ( 98 < # # Q 3 98? 98 > > 3 8 9 9 ««««> 3 «>
Game Physics. Game and Media Technology Master Program - Utrecht University. Dr. Nicolas Pronost
 Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Rigid body physics Particle system Most simple instance of a physics system Each object (body) is a particle Each particle
Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Rigid body physics Particle system Most simple instance of a physics system Each object (body) is a particle Each particle
AE/ME 339. Computational Fluid Dynamics (CFD) K. M. Isaac. Momentum equation. Computational Fluid Dynamics (AE/ME 339) MAEEM Dept.
 K. M. Isaac. Momentum equation. Computational Fluid Dynamics (AE/ME 339) MAEEM Dept.") AE/ME 339 Computational Fluid Dynamics (CFD) 9//005 Topic7_NS_ F0 1 Momentum equation 9//005 Topic7_NS_ F0 1 Consider the moving fluid element model shown in Figure.b Basis is Newton s nd Law which says
AE/ME 339 Computational Fluid Dynamics (CFD) 9//005 Topic7_NS_ F0 1 Momentum equation 9//005 Topic7_NS_ F0 1 Consider the moving fluid element model shown in Figure.b Basis is Newton s nd Law which says
DIPOLES III. q const. The voltage produced by such a charge distribution is given by. r r'
 DIPOLES III We now consider a particularly important charge configuration a dipole. This consists of two equal but opposite charges separated by a small distance. We define the dipole moment as p lim q
DIPOLES III We now consider a particularly important charge configuration a dipole. This consists of two equal but opposite charges separated by a small distance. We define the dipole moment as p lim q
Lecture notes on introduction to tensors. K. M. Udayanandan Associate Professor Department of Physics Nehru Arts and Science College, Kanhangad
 Lecture notes on introduction to tensors K. M. Udayanandan Associate Professor Department of Physics Nehru Arts and Science College, Kanhangad 1 . Syllabus Tensor analysis-introduction-definition-definition
Lecture notes on introduction to tensors K. M. Udayanandan Associate Professor Department of Physics Nehru Arts and Science College, Kanhangad 1 . Syllabus Tensor analysis-introduction-definition-definition
Solving Einstein s Equation Numerically III
 Solving Einstein s Equation Numerically III Lee Lindblom Center for Astrophysics and Space Sciences University of California at San Diego Mathematical Sciences Center Lecture Series Tsinghua University
Solving Einstein s Equation Numerically III Lee Lindblom Center for Astrophysics and Space Sciences University of California at San Diego Mathematical Sciences Center Lecture Series Tsinghua University
II&Ij <Md Tmlaiiiiiit, aad once in Ihe y a w Teataa m i, the vmb thatalmta oot Uiaapirit world. into as abode or wotld by them- CooTBOtioa
 382 4 7 q X
382 4 7 q X
Diffusion Tensor Imaging I. Jennifer Campbell
 Diffusion Tensor Imaging I Jennifer Campbell Diffusion Imaging Molecular diffusion The diffusion tensor Diffusion weighting in MRI Alternatives to the tensor Overview of applications Diffusion Imaging
Diffusion Tensor Imaging I Jennifer Campbell Diffusion Imaging Molecular diffusion The diffusion tensor Diffusion weighting in MRI Alternatives to the tensor Overview of applications Diffusion Imaging
Programming Project 2: Harmonic Vibrational Frequencies
 Programming Project 2: Harmonic Vibrational Frequencies Center for Computational Chemistry University of Georgia Athens, Georgia 30602 Summer 2012 1 Introduction This is the second programming project
Programming Project 2: Harmonic Vibrational Frequencies Center for Computational Chemistry University of Georgia Athens, Georgia 30602 Summer 2012 1 Introduction This is the second programming project
1 First and second variational formulas for area
 1 First and second variational formulas for area In this chapter, we will derive the first and second variational formulas for the area of a submanifold. This will be useful in our later discussion on
1 First and second variational formulas for area In this chapter, we will derive the first and second variational formulas for the area of a submanifold. This will be useful in our later discussion on
Exercise 1: Inertia moment of a simple pendulum
 Exercise : Inertia moment of a simple pendulum A simple pendulum is represented in Figure. Three reference frames are introduced: R is the fixed/inertial RF, with origin in the rotation center and i along
Exercise : Inertia moment of a simple pendulum A simple pendulum is represented in Figure. Three reference frames are introduced: R is the fixed/inertial RF, with origin in the rotation center and i along
Estimation of Non-Negative ODFs using the Eigenvalue Distribution of Spherical Functions
 Estimation of Non-Negative ODFs using the Eigenvalue Distribution of Spherical Functions Evan Schwab, Bijan Afsari, and René Vidal Center for Imaging Science, Johns Hopkins University Abstract. Current
Estimation of Non-Negative ODFs using the Eigenvalue Distribution of Spherical Functions Evan Schwab, Bijan Afsari, and René Vidal Center for Imaging Science, Johns Hopkins University Abstract. Current
Rigid Body Rotation. Speaker: Xiaolei Chen Advisor: Prof. Xiaolin Li. Department of Applied Mathematics and Statistics Stony Brook University (SUNY)
") Rigid Body Rotation Speaker: Xiaolei Chen Advisor: Prof. Xiaolin Li Department of Applied Mathematics and Statistics Stony Brook University (SUNY) Content Introduction Angular Velocity Angular Momentum
Rigid Body Rotation Speaker: Xiaolei Chen Advisor: Prof. Xiaolin Li Department of Applied Mathematics and Statistics Stony Brook University (SUNY) Content Introduction Angular Velocity Angular Momentum
NDT&E Methods: UT. VJ Technologies CAVITY INSPECTION. Nondestructive Testing & Evaluation TPU Lecture Course 2015/16.
 CAVITY INSPECTION NDT&E Methods: UT VJ Technologies NDT&E Methods: UT 6. NDT&E: Introduction to Methods 6.1. Ultrasonic Testing: Basics of Elasto-Dynamics 6.2. Principles of Measurement 6.3. The Pulse-Echo
CAVITY INSPECTION NDT&E Methods: UT VJ Technologies NDT&E Methods: UT 6. NDT&E: Introduction to Methods 6.1. Ultrasonic Testing: Basics of Elasto-Dynamics 6.2. Principles of Measurement 6.3. The Pulse-Echo
MATH 19520/51 Class 5
 MATH 19520/51 Class 5 Minh-Tam Trinh University of Chicago 2017-10-04 1 Definition of partial derivatives. 2 Geometry of partial derivatives. 3 Higher derivatives. 4 Definition of a partial differential
MATH 19520/51 Class 5 Minh-Tam Trinh University of Chicago 2017-10-04 1 Definition of partial derivatives. 2 Geometry of partial derivatives. 3 Higher derivatives. 4 Definition of a partial differential
Topological insulator part I: Phenomena
 Phys60.nb 5 Topological insulator part I: Phenomena (Part II and Part III discusses how to understand a topological insluator based band-structure theory and gauge theory) (Part IV discusses more complicated
Phys60.nb 5 Topological insulator part I: Phenomena (Part II and Part III discusses how to understand a topological insluator based band-structure theory and gauge theory) (Part IV discusses more complicated
EINDHOVEN UNIVERSITY OF TECHNOLOGY Department of Mathematics and Computer Science. CASA-Report September 2010
 EINDHOVEN UNIVERSITY OF TECHNOLOGY Department of Mathematics and Computer Science CASA-Report 10-48 September 2010 A new tensorial framework for single-shell high angular resolution diffusion imaging by
EINDHOVEN UNIVERSITY OF TECHNOLOGY Department of Mathematics and Computer Science CASA-Report 10-48 September 2010 A new tensorial framework for single-shell high angular resolution diffusion imaging by
Solution of Matrix Eigenvalue Problem
 Outlines October 12, 2004 Outlines Part I: Review of Previous Lecture Part II: Review of Previous Lecture Outlines Part I: Review of Previous Lecture Part II: Standard Matrix Eigenvalue Problem Other Forms
Outlines October 12, 2004 Outlines Part I: Review of Previous Lecture Part II: Review of Previous Lecture Outlines Part I: Review of Previous Lecture Part II: Standard Matrix Eigenvalue Problem Other Forms
Flight Dynamics & Control Equations of Motion of 6 dof Rigid Aircraft-Kinematics
 Flight Dynamic & Control Equation of Motion of 6 dof Rigid Aircraft-Kinematic Harry G. Kwatny Department of Mechanical Engineering & Mechanic Drexel Univerity Outline Rotation Matrix Angular Velocity Euler
Flight Dynamic & Control Equation of Motion of 6 dof Rigid Aircraft-Kinematic Harry G. Kwatny Department of Mechanical Engineering & Mechanic Drexel Univerity Outline Rotation Matrix Angular Velocity Euler
CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer
 CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements Monday October 3: Discussion Assignment
CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements Monday October 3: Discussion Assignment
Problem Set 2 Due Tuesday, September 27, ; p : 0. (b) Construct a representation using five d orbitals that sit on the origin as a basis: 1
 Construct a representation using five d orbitals that sit on the origin as a basis: 1") Problem Set 2 Due Tuesday, September 27, 211 Problems from Carter: Chapter 2: 2a-d,g,h,j 2.6, 2.9; Chapter 3: 1a-d,f,g 3.3, 3.6, 3.7 Additional problems: (1) Consider the D 4 point group and use a coordinate
Problem Set 2 Due Tuesday, September 27, 211 Problems from Carter: Chapter 2: 2a-d,g,h,j 2.6, 2.9; Chapter 3: 1a-d,f,g 3.3, 3.6, 3.7 Additional problems: (1) Consider the D 4 point group and use a coordinate