Advanced Aerospace Control. Marco Lovera Dipartimento di Scienze e Tecnologie Aerospaziali, Politecnico di Milano
|
|
|
- Phillip Black
- 5 years ago
- Views:
Transcription


1 Advanced Aerospace Control Dipartimento di Scienze e Tecnologie Aerospaziali, Politecnico di Milano
2 ICT for control systems engineering School of Industrial and Information Engineering Aeronautical Engineering General information on the course. Overview of the course programme.
3 General information Dipartimento di Scienze e Tecnologie Aerospaziali Tel marco.lovera@polimi.it Meeting hours: Tuesday Course web page: accessible from
4 Course schedule Schedule: Monday BL27.18 Tuesday BL27.11 Wednesday BL27.17 Composition of the course: 40/45 lecture hours 10/15 exercises, worked examples and seminars for a total of 6 CFU.
5 Exam Two options available for the exam: oral exam a project (more on this later). There is no mid-semester test.
6 Prerequisites Fondamenti di Automatica or equivalent introductory course to systems and control and SISO frequency-domain analysis and design. Key topics on which prior knowledge is assumed: Linear systems theory Stability of linear systems Laplace and Fourier transforms Frequency domain analysis of SISO linear systems Nyquist and Bode criteria for the stability of SISO feedback systems Static and dynamic performance for SISO feedback systems (we will rapidly revise some of these topics in the first lectures)
7 Material Slides in progress, available on the web Reference textbooks: H. K. Khalil: Nonlinear Systems, Prentice Hall, E. Lavretsky, K. Wise: Robust and Adaptive Control with Aerospace Applications, Springer. Accessible online from S. Skogestad, I. Postlethwaite: Multivariable Feedback Control: Analysis and Design, Wiley, First three chapters available online at
8 Aerospace and Control?


9 Kitty Hawk, December
10 The main difficulty Men already know how to construct wings or airplanes Men also know how to build engines and screws of sufficient lightness and power Inability to balance and steer still confronts students of the flying problem When this one feature has been worked out, the age of flying will have arrived, for all other difficulties are of minor importance. Wilbur Wright, 1901.

11 and the main contribution: controllability 11


12 Paris, June

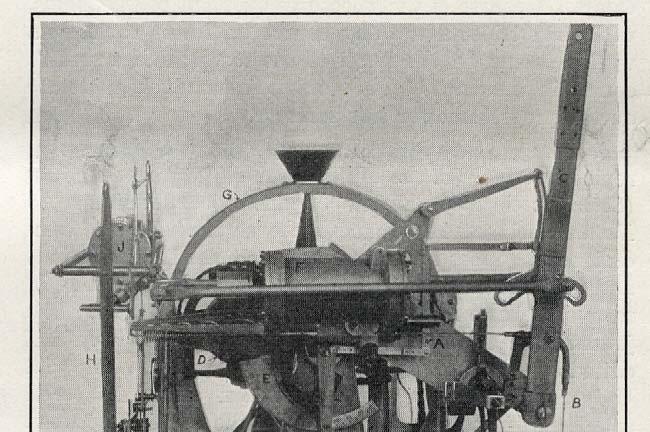
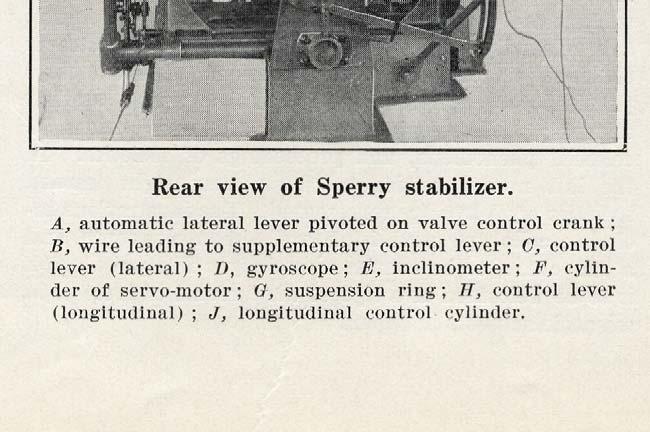
13 The first autopilot: entirely electro-mechanical and designed empirically 13


14 New York, August

15 and November 1932: the foundations of control theory 15

16 XXI century: a generic control scheme for an aerospace vehicle 16
17 Introduction to Advanced Aerospace Control Automatic control systems play an increasingly important role in aerospace engineering in view of the higher level of automation expected from flight vehicles and of the recent emergence of unmanned vehicles. Aerospace control systems design problems are intrinsically multivariable, nonlinear, often associated with large model uncertainty and unstable dynamics. These are the main reasons why advanced methods for analysis and synthesis are frequently adopted in aerospace applications.
18 Introduction to Advanced Aerospace Control In view of the above, the course aims at the following goals: to provide a sound background on modern methods and tools for the stability and performance analysis of linear and nonlinear systems; to cover robust analysis and design of SISO and MIMO linear timeinvariant (LTI) feedback control systems; to discuss basic ideas on the linear parameter-varying (LPV) framework for gain-scheduled control systems design; to present classical results on nonlinear analysis; to illustrate the above methods using detailed case studies.
19 Introduction to Advanced Aerospace Control Basic control courses deal with: SISO plants and controllers Analysis and design for: nominal stability nominal performance. y o (t) n(t) d(t) R(s) + + G(s) - y(t)
20 Introduction to Advanced Aerospace Control Restrictive setting for us, as in aerospace problems uncertainty matters, so robustness of stability and performance is an issue the plant is MIMO, so methods for SISO analysis and design break down.
21 Introduction to Advanced Aerospace Control Why is robust control harder? the response of uncertain plants is harder to characterise predicting stability and performance is more complicated And why is it relevant? variation of dynamics over envelope modelling of aerodynamics and structural dynamics actuator/sensor dynamics delays due to implementation

22 Introduction to Advanced Aerospace Control

23 Introduction to Advanced Aerospace Control
24 Introduction to Advanced Aerospace Control 24 The linearised dynamics depend strongly on the operating condition. Examples (Padfield 2007): flight dynamics of the Westland Lynx:
25 Introduction to Advanced Aerospace Control 25 Examples (Padfield 2007): flight dynamics of the Puma
26 Introduction to Advanced Aerospace Control Why is MIMO control harder? MIMO plants exhibit more complex behaviour Performance requirements harder to formulate Design less intuitive than SISO case Why is MIMO control relevant? Besides single-axis autopilots (such as the 1912 Sperry), all FCS design problems are multivariable!


27 Course programme 1. Introduction: Recap on linear systems and SISO analysis/design problems Motivation for advanced analysis and design methods; Introductory examples.
28 Course programme 2. Systems theory - stability: Equilibria of nonlinear systems; Lyapunov stability for equilibria of nonlinear systems: definition and examples; Stability for LTI systems: Lyapunov inequalities and equations.
29 Course programme 3. Systems theory - performance: H 2 performance for linear systems; Small gain and passivity theory; H performance for linear systems. Question addressed: for a generic feedback system, how do you formalize performance requirements in a way that is compatible with handling qualities requirements scalable from SISO to MIMO problems suitable for automated solution of design problems?
30 Course programme 4. Linear SISO feedback systems - robust analysis and design: Uncertainty modelling in SISO systems; Robust stability analysis of SISO feedback systems; Nominal and robust performance analysis; Requirement specification; Robust design: unstructured and structured mixed sensitivity synthesis. Question addressed: for a generic feedback system, how do you formulate a control law design problem so that Nominal and robust stability Nominal and robust performance Control law structure are all taken into account and the design problem is solved automatically?
31 Course programme 5. Linear MIMO robust analysis and design: Introduction to MIMO linear systems; Nominal stability and performance in the MIMO case; Robust stability and performance in the MIMO case; MIMO robust design.
32 Course programme 6. Nonlinear analysis methods: Static nonlinearities: circle and Popov criteria; Limit cycles and oscillations: the describing function method; Introduction to nonlinear design: feedback linearisation, backstepping, adaptive control. Questions addressed: for a typical FCS, actuator saturations are a key issue; is it possible to predict their role in the operation of the system? on UAVs it is possible to experiment with more advanced control laws, e.g., use adaptive/learning systems, can they be designed using the theory discussed so far?
33 Course programme 7. Case studies Attitude control for a small-scale UAV: throughout the course we will develop as a case study the design of the control laws for a small scale UAV: Modelling and simulation: Equations of motion Actuator and sensors modelling Linearisation Parameter estimation from data Set up of a simulation environment Definition of the control architecture Design of the control laws Verification in simulation environment.
34 Course programme 7. Case studies Attitude control for a full-scale helicopter: the main issues in the design of rotorcraft attitude control systems will be discussed a design approach based on the previous topics will be presented one (or more) lectures given by the flight control laws designers at Leonardo Helicopters will complement the discussion.




35 Exam project The Aerospace Systems and Control Laboratory at DAER is currently setting up an indoor facility for multirotor UAVs. A number of multirotor platforms have been designed and built in-house and are available for testing.
36 Exam project The exam project, for the interested students, will consist in the design, implementation and in-flight performance verification of flight control laws for a UAV.
37 Recap on LTI SISO systems: time domain LTI systems in state space form: definitions and notation SISO first order systems: solutions of state and output equations, free and forced response SISO higher order systems: solutions of state and output equations, free and forced response in formal analogy Matrix exponential and the response of higher order systems Coordinate changes in state space and equivalent representations Superposition principle Stability of LTI systems: definition via free motion and eigenvalues.
38 Recap on LTI SISO systems: frequency domain Transfer function definition and connection with impulse response Definition of poles, zeros, gain and response type Poles and eigenvalues: cancellations Definition of frequency response operator and sinusoidal response Minimum phase and nonminimum phase zeros.
Chapter 2 Review of Linear and Nonlinear Controller Designs
 Chapter 2 Review of Linear and Nonlinear Controller Designs This Chapter reviews several flight controller designs for unmanned rotorcraft. 1 Flight control systems have been proposed and tested on a wide
Chapter 2 Review of Linear and Nonlinear Controller Designs This Chapter reviews several flight controller designs for unmanned rotorcraft. 1 Flight control systems have been proposed and tested on a wide
Automatic Control Systems theory overview (discrete time systems)
") Automatic Control Systems theory overview (discrete time systems) Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Motivations
Automatic Control Systems theory overview (discrete time systems) Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Motivations
CHEE 319 Process Dynamics and Control
 CHEE 319 Process Dynamics and Control Winter 2012 Instructor: M.Guay TAs: S. Dougherty, D. Park and E. Moshksar 1 Organization Instructor: Dr. Martin Guay Office: Dupuis 406 Phone: 533-2788 Email: guaym@chee.queensu.ca
CHEE 319 Process Dynamics and Control Winter 2012 Instructor: M.Guay TAs: S. Dougherty, D. Park and E. Moshksar 1 Organization Instructor: Dr. Martin Guay Office: Dupuis 406 Phone: 533-2788 Email: guaym@chee.queensu.ca
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Guidance and Control Introduction and PID Loops Dr. Kostas Alexis (CSE) Autonomous Robot Challenges How do I control where to go? Autonomous Mobile Robot Design Topic:
Autonomous Mobile Robot Design Topic: Guidance and Control Introduction and PID Loops Dr. Kostas Alexis (CSE) Autonomous Robot Challenges How do I control where to go? Autonomous Mobile Robot Design Topic:
EG4321/EG7040. Nonlinear Control. Dr. Matt Turner
 EG4321/EG7040 Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear [System Analysis] and Control Dr. Matt
EG4321/EG7040 Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear [System Analysis] and Control Dr. Matt
What is flight dynamics? AE540: Flight Dynamics and Control I. What is flight control? Is the study of aircraft motion and its characteristics.
 KING FAHD UNIVERSITY Department of Aerospace Engineering AE540: Flight Dynamics and Control I Instructor Dr. Ayman Hamdy Kassem What is flight dynamics? Is the study of aircraft motion and its characteristics.
KING FAHD UNIVERSITY Department of Aerospace Engineering AE540: Flight Dynamics and Control I Instructor Dr. Ayman Hamdy Kassem What is flight dynamics? Is the study of aircraft motion and its characteristics.
EECE 460. Decentralized Control of MIMO Systems. Guy A. Dumont. Department of Electrical and Computer Engineering University of British Columbia
 EECE 460 Decentralized Control of MIMO Systems Guy A. Dumont Department of Electrical and Computer Engineering University of British Columbia January 2011 Guy A. Dumont (UBC EECE) EECE 460 - Decentralized
EECE 460 Decentralized Control of MIMO Systems Guy A. Dumont Department of Electrical and Computer Engineering University of British Columbia January 2011 Guy A. Dumont (UBC EECE) EECE 460 - Decentralized
Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL VOL. 56 NO. 3 MARCH 2011 655 Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays Nikolaos Bekiaris-Liberis Miroslav Krstic In this case system
IEEE TRANSACTIONS ON AUTOMATIC CONTROL VOL. 56 NO. 3 MARCH 2011 655 Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays Nikolaos Bekiaris-Liberis Miroslav Krstic In this case system
Control Systems I. Lecture 6: Poles and Zeros. Readings: Emilio Frazzoli. Institute for Dynamic Systems and Control D-MAVT ETH Zürich
 Control Systems I Lecture 6: Poles and Zeros Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 27, 2017 E. Frazzoli (ETH) Lecture 6: Control Systems I 27/10/2017
Control Systems I Lecture 6: Poles and Zeros Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 27, 2017 E. Frazzoli (ETH) Lecture 6: Control Systems I 27/10/2017
Dr Ian R. Manchester Dr Ian R. Manchester AMME 3500 : Review
 Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Linear System Theory. Wonhee Kim Lecture 1. March 7, 2018
 Linear System Theory Wonhee Kim Lecture 1 March 7, 2018 1 / 22 Overview Course Information Prerequisites Course Outline What is Control Engineering? Examples of Control Systems Structure of Control Systems
Linear System Theory Wonhee Kim Lecture 1 March 7, 2018 1 / 22 Overview Course Information Prerequisites Course Outline What is Control Engineering? Examples of Control Systems Structure of Control Systems
Robust Control. 8th class. Spring, 2018 Instructor: Prof. Masayuki Fujita (S5-303B) Tue., 29th May, 2018, 10:45~11:30, S423 Lecture Room
 Tue., 29th May, 2018, 10:45~11:30, S423 Lecture Room") Robust Control Spring, 2018 Instructor: Prof. Masayuki Fujita (S5-303B) 8th class Tue., 29th May, 2018, 10:45~11:30, S423 Lecture Room 1 8. Design Example 8.1 HiMAT: Control (Highly Maneuverable Aircraft
Robust Control Spring, 2018 Instructor: Prof. Masayuki Fujita (S5-303B) 8th class Tue., 29th May, 2018, 10:45~11:30, S423 Lecture Room 1 8. Design Example 8.1 HiMAT: Control (Highly Maneuverable Aircraft
Overview of the Seminar Topic
 Overview of the Seminar Topic Simo Särkkä Laboratory of Computational Engineering Helsinki University of Technology September 17, 2007 Contents 1 What is Control Theory? 2 History
Overview of the Seminar Topic Simo Särkkä Laboratory of Computational Engineering Helsinki University of Technology September 17, 2007 Contents 1 What is Control Theory? 2 History
Aim. Unit abstract. Learning outcomes. QCF level: 6 Credit value: 15
 Unit T23: Flight Dynamics Unit code: J/504/0132 QCF level: 6 Credit value: 15 Aim The aim of this unit is to develop learners understanding of aircraft flight dynamic principles by considering and analysing
Unit T23: Flight Dynamics Unit code: J/504/0132 QCF level: 6 Credit value: 15 Aim The aim of this unit is to develop learners understanding of aircraft flight dynamic principles by considering and analysing
Control Systems I. Lecture 7: Feedback and the Root Locus method. Readings: Jacopo Tani. Institute for Dynamic Systems and Control D-MAVT ETH Zürich
 Control Systems I Lecture 7: Feedback and the Root Locus method Readings: Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 2, 2018 J. Tani, E. Frazzoli (ETH) Lecture 7:
Control Systems I Lecture 7: Feedback and the Root Locus method Readings: Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 2, 2018 J. Tani, E. Frazzoli (ETH) Lecture 7:
Uncertainty and Robustness for SISO Systems
 Uncertainty and Robustness for SISO Systems ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Outline Nature of uncertainty (models and signals). Physical sources of model uncertainty. Mathematical
Uncertainty and Robustness for SISO Systems ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Outline Nature of uncertainty (models and signals). Physical sources of model uncertainty. Mathematical
Control Systems II. ETH, MAVT, IDSC, Lecture 4 17/03/2017. G. Ducard
 Control Systems II ETH, MAVT, IDSC, Lecture 4 17/03/2017 Lecture plan: Control Systems II, IDSC, 2017 SISO Control Design 24.02 Lecture 1 Recalls, Introductory case study 03.03 Lecture 2 Cascaded Control
Control Systems II ETH, MAVT, IDSC, Lecture 4 17/03/2017 Lecture plan: Control Systems II, IDSC, 2017 SISO Control Design 24.02 Lecture 1 Recalls, Introductory case study 03.03 Lecture 2 Cascaded Control
Lecture 6 Classical Control Overview IV. Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
 Lecture 6 Classical Control Overview IV Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Lead Lag Compensator Design Dr. Radhakant Padhi Asst.
Lecture 6 Classical Control Overview IV Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Lead Lag Compensator Design Dr. Radhakant Padhi Asst.
A brief introduction to robust H control
 A brief introduction to robust H control Jean-Marc Biannic System Control and Flight Dynamics Department ONERA, Toulouse. http://www.onera.fr/staff/jean-marc-biannic/ http://jm.biannic.free.fr/ European
A brief introduction to robust H control Jean-Marc Biannic System Control and Flight Dynamics Department ONERA, Toulouse. http://www.onera.fr/staff/jean-marc-biannic/ http://jm.biannic.free.fr/ European
CDS 101/110a: Lecture 10-1 Robust Performance
 CDS 11/11a: Lecture 1-1 Robust Performance Richard M. Murray 1 December 28 Goals: Describe how to represent uncertainty in process dynamics Describe how to analyze a system in the presence of uncertainty
CDS 11/11a: Lecture 1-1 Robust Performance Richard M. Murray 1 December 28 Goals: Describe how to represent uncertainty in process dynamics Describe how to analyze a system in the presence of uncertainty
Lecture plan: Control Systems II, IDSC, 2017
 Control Systems II MAVT, IDSC, Lecture 8 28/04/2017 G. Ducard Lecture plan: Control Systems II, IDSC, 2017 SISO Control Design 24.02 Lecture 1 Recalls, Introductory case study 03.03 Lecture 2 Cascaded
Control Systems II MAVT, IDSC, Lecture 8 28/04/2017 G. Ducard Lecture plan: Control Systems II, IDSC, 2017 SISO Control Design 24.02 Lecture 1 Recalls, Introductory case study 03.03 Lecture 2 Cascaded
Richiami di Controlli Automatici
 Richiami di Controlli Automatici Gianmaria De Tommasi 1 1 Università degli Studi di Napoli Federico II detommas@unina.it Ottobre 2012 Corsi AnsaldoBreda G. De Tommasi (UNINA) Richiami di Controlli Automatici
Richiami di Controlli Automatici Gianmaria De Tommasi 1 1 Università degli Studi di Napoli Federico II detommas@unina.it Ottobre 2012 Corsi AnsaldoBreda G. De Tommasi (UNINA) Richiami di Controlli Automatici
FEL3210 Multivariable Feedback Control
 FEL3210 Multivariable Feedback Control Lecture 5: Uncertainty and Robustness in SISO Systems [Ch.7-(8)] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 5:Uncertainty and Robustness () FEL3210 MIMO
FEL3210 Multivariable Feedback Control Lecture 5: Uncertainty and Robustness in SISO Systems [Ch.7-(8)] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 5:Uncertainty and Robustness () FEL3210 MIMO
Closed-loop system 2/1/2016. Generally MIMO case. Two-degrees-of-freedom (2 DOF) control structure. (2 DOF structure) The closed loop equations become
 control structure. (2 DOF structure) The closed loop equations become") Closed-loop system enerally MIMO case Two-degrees-of-freedom (2 DOF) control structure (2 DOF structure) 2 The closed loop equations become solving for z gives where is the closed loop transfer function
Closed-loop system enerally MIMO case Two-degrees-of-freedom (2 DOF) control structure (2 DOF structure) 2 The closed loop equations become solving for z gives where is the closed loop transfer function
CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER
 114 CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER 5.1 INTRODUCTION Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. It also refers
114 CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER 5.1 INTRODUCTION Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. It also refers
Outline. Classical Control. Lecture 1
 Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
Unit 11 - Week 7: Quantitative feedback theory (Part 1/2)
") X reviewer3@nptel.iitm.ac.in Courses» Control System Design Announcements Course Ask a Question Progress Mentor FAQ Unit 11 - Week 7: Quantitative feedback theory (Part 1/2) Course outline How to access
X reviewer3@nptel.iitm.ac.in Courses» Control System Design Announcements Course Ask a Question Progress Mentor FAQ Unit 11 - Week 7: Quantitative feedback theory (Part 1/2) Course outline How to access
Copyright. SRS, U DuE, rof. Söffker. Course Control Theory WiSe 2014/15
 Course Theory WiSe 2014/15 Room: SG 135 Time: Fr 3.00 6.30 pm (lecture and exercise) Practical exercise: 2nd part of semester Assistants: Xi Nowak, M.Sc.; WEB: http://www.uni-due.de/srs Manuscript Note
Course Theory WiSe 2014/15 Room: SG 135 Time: Fr 3.00 6.30 pm (lecture and exercise) Practical exercise: 2nd part of semester Assistants: Xi Nowak, M.Sc.; WEB: http://www.uni-due.de/srs Manuscript Note
Robust Control. 1st class. Spring, 2017 Instructor: Prof. Masayuki Fujita (S5-303B) Tue., 11th April, 2017, 10:45~12:15, S423 Lecture Room
 Tue., 11th April, 2017, 10:45~12:15, S423 Lecture Room") Robust Control Spring, 2017 Instructor: Prof. Masayuki Fujita (S5-303B) 1st class Tue., 11th April, 2017, 10:45~12:15, S423 Lecture Room Reference: [H95] R.A. Hyde, Aerospace Control Design: A VSTOL Flight
Robust Control Spring, 2017 Instructor: Prof. Masayuki Fujita (S5-303B) 1st class Tue., 11th April, 2017, 10:45~12:15, S423 Lecture Room Reference: [H95] R.A. Hyde, Aerospace Control Design: A VSTOL Flight
Robust Control. 2nd class. Spring, 2018 Instructor: Prof. Masayuki Fujita (S5-303B) Tue., 17th April, 2018, 10:45~12:15, S423 Lecture Room
 Tue., 17th April, 2018, 10:45~12:15, S423 Lecture Room") Robust Control Spring, 2018 Instructor: Prof. Masayuki Fujita (S5-303B) 2nd class Tue., 17th April, 2018, 10:45~12:15, S423 Lecture Room 2. Nominal Performance 2.1 Weighted Sensitivity [SP05, Sec. 2.8,
Robust Control Spring, 2018 Instructor: Prof. Masayuki Fujita (S5-303B) 2nd class Tue., 17th April, 2018, 10:45~12:15, S423 Lecture Room 2. Nominal Performance 2.1 Weighted Sensitivity [SP05, Sec. 2.8,
Robust Performance Example #1
 Robust Performance Example # The transfer function for a nominal system (plant) is given, along with the transfer function for one extreme system. These two transfer functions define a family of plants
Robust Performance Example # The transfer function for a nominal system (plant) is given, along with the transfer function for one extreme system. These two transfer functions define a family of plants
Internal Model Control of A Class of Continuous Linear Underactuated Systems
 Internal Model Control of A Class of Continuous Linear Underactuated Systems Asma Mezzi Tunis El Manar University, Automatic Control Research Laboratory, LA.R.A, National Engineering School of Tunis (ENIT),
Internal Model Control of A Class of Continuous Linear Underactuated Systems Asma Mezzi Tunis El Manar University, Automatic Control Research Laboratory, LA.R.A, National Engineering School of Tunis (ENIT),
Dr. Ian R. Manchester
 Dr Ian R. Manchester Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus
Dr Ian R. Manchester Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus
Analysis and Synthesis of Single-Input Single-Output Control Systems
 Lino Guzzella Analysis and Synthesis of Single-Input Single-Output Control Systems l+kja» \Uja>)W2(ja»\ um Contents 1 Definitions and Problem Formulations 1 1.1 Introduction 1 1.2 Definitions 1 1.2.1 Systems
Lino Guzzella Analysis and Synthesis of Single-Input Single-Output Control Systems l+kja» \Uja>)W2(ja»\ um Contents 1 Definitions and Problem Formulations 1 1.1 Introduction 1 1.2 Definitions 1 1.2.1 Systems
GT-POWER linearization and engine advanced control design applications
 GT-POWER linearization and engine advanced control design applications Kenny Follen Ali Borhan Ed Hodzen Cummins Inc. North American GT Conference 2016 November 14-15, 2016 Michigan, USA Outline Background
GT-POWER linearization and engine advanced control design applications Kenny Follen Ali Borhan Ed Hodzen Cummins Inc. North American GT Conference 2016 November 14-15, 2016 Michigan, USA Outline Background
Control Systems I. Lecture 1: Introduction. Suggested Readings: Åström & Murray Ch. 1, Guzzella Ch. 1. Emilio Frazzoli
 Control Systems I Lecture 1: Introduction Suggested Readings: Åström & Murray Ch. 1, Guzzella Ch. 1 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 22, 2017 E. Frazzoli
Control Systems I Lecture 1: Introduction Suggested Readings: Åström & Murray Ch. 1, Guzzella Ch. 1 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 22, 2017 E. Frazzoli
Applied Nonlinear Control
 Applied Nonlinear Control JEAN-JACQUES E. SLOTINE Massachusetts Institute of Technology WEIPING LI Massachusetts Institute of Technology Pearson Education Prentice Hall International Inc. Upper Saddle
Applied Nonlinear Control JEAN-JACQUES E. SLOTINE Massachusetts Institute of Technology WEIPING LI Massachusetts Institute of Technology Pearson Education Prentice Hall International Inc. Upper Saddle
EECE Adaptive Control
 EECE 574 - Adaptive Control Overview Guy Dumont Department of Electrical and Computer Engineering University of British Columbia Lectures: Thursday 09h00-12h00 Location: PPC 101 Guy Dumont (UBC) EECE 574
EECE 574 - Adaptive Control Overview Guy Dumont Department of Electrical and Computer Engineering University of British Columbia Lectures: Thursday 09h00-12h00 Location: PPC 101 Guy Dumont (UBC) EECE 574
San José State University Aerospace Engineering Department AE168: Aerospace Vehicle Dynamics & Control Fall 2016
 San José State University Aerospace Engineering Department AE168: Aerospace Vehicle Dynamics & Control Fall 216 Course and Contact Information Instructor: Office Location: Email: Office Hours: Class Days/Time:
San José State University Aerospace Engineering Department AE168: Aerospace Vehicle Dynamics & Control Fall 216 Course and Contact Information Instructor: Office Location: Email: Office Hours: Class Days/Time:
Stability of Parameter Adaptation Algorithms. Big picture
 ME5895, UConn, Fall 215 Prof. Xu Chen Big picture For ˆθ (k + 1) = ˆθ (k) + [correction term] we haven t talked about whether ˆθ(k) will converge to the true value θ if k. We haven t even talked about
ME5895, UConn, Fall 215 Prof. Xu Chen Big picture For ˆθ (k + 1) = ˆθ (k) + [correction term] we haven t talked about whether ˆθ(k) will converge to the true value θ if k. We haven t even talked about
Theory of Machines and Automatic Control Winter 2018/2019
 Theory of Machines and Automatic Control Winter 2018/2019 Lecturer: Sebastian Korczak, PhD, Eng. Institute of Machine Design Fundamentals - Department of Mechanics http://www.ipbm.simr.pw.edu.pl/ Lecture
Theory of Machines and Automatic Control Winter 2018/2019 Lecturer: Sebastian Korczak, PhD, Eng. Institute of Machine Design Fundamentals - Department of Mechanics http://www.ipbm.simr.pw.edu.pl/ Lecture
Lecture 25: Tue Nov 27, 2018
 Lecture 25: Tue Nov 27, 2018 Reminder: Lab 3 moved to Tuesday Dec 4 Lecture: review time-domain characteristics of 2nd-order systems intro to control: feedback open-loop vs closed-loop control intro to
Lecture 25: Tue Nov 27, 2018 Reminder: Lab 3 moved to Tuesday Dec 4 Lecture: review time-domain characteristics of 2nd-order systems intro to control: feedback open-loop vs closed-loop control intro to
Lecture 12. Upcoming labs: Final Exam on 12/21/2015 (Monday)10:30-12:30
10:30-12:30") 289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
ROBUST STABILITY AND PERFORMANCE ANALYSIS* [8 # ]
![ROBUST STABILITY AND PERFORMANCE ANALYSIS* [8 # ]](/thumbs/89/99011882.jpg "ROBUST STABILITY AND PERFORMANCE ANALYSIS* [8 # ]") ROBUST STABILITY AND PERFORMANCE ANALYSIS* [8 # ] General control configuration with uncertainty [8.1] For our robustness analysis we use a system representation in which the uncertain perturbations are
ROBUST STABILITY AND PERFORMANCE ANALYSIS* [8 # ] General control configuration with uncertainty [8.1] For our robustness analysis we use a system representation in which the uncertain perturbations are
Analyzing the Stability Robustness of Interval Polynomials
 1 Analyzing the Stability Robustness of Interval Polynomials Prof. Guy Beale Electrical and Computer Engineering Department George Mason University Correspondence concerning this paper should be sent to
1 Analyzing the Stability Robustness of Interval Polynomials Prof. Guy Beale Electrical and Computer Engineering Department George Mason University Correspondence concerning this paper should be sent to
Control Systems I. Lecture 1: Introduction. Suggested Readings: Åström & Murray Ch. 1. Jacopo Tani
 Control Systems I Lecture 1: Introduction Suggested Readings: Åström & Murray Ch. 1 Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 21, 2018 J. Tani, E. Frazzoli (ETH)
Control Systems I Lecture 1: Introduction Suggested Readings: Åström & Murray Ch. 1 Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 21, 2018 J. Tani, E. Frazzoli (ETH)
Control Systems I. Lecture 2: Modeling. Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch Emilio Frazzoli
 Control Systems I Lecture 2: Modeling Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch. 2-3 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 29, 2017 E. Frazzoli
Control Systems I Lecture 2: Modeling Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch. 2-3 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 29, 2017 E. Frazzoli
H inf. Loop Shaping Robust Control vs. Classical PI(D) Control: A case study on the Longitudinal Dynamics of Hezarfen UAV
 Control: A case study on the Longitudinal Dynamics of Hezarfen UAV") Proceedings of the 2nd WSEAS International Conference on Dynamical Systems and Control, Bucharest, Romania, October 16-17, 2006 105 H inf. Loop Shaping Robust Control vs. Classical PI(D) Control: A case
Proceedings of the 2nd WSEAS International Conference on Dynamical Systems and Control, Bucharest, Romania, October 16-17, 2006 105 H inf. Loop Shaping Robust Control vs. Classical PI(D) Control: A case
EET 3212 Control Systems. Control Systems Engineering, 6th Edition, Norman S. Nise December 2010, A. Goykadosh and M.
 NEW YORK CITY COLLEGE OF TECHNOLOGY The City University of New York 300 Jay Street Brooklyn, NY 11201-2983 Department of Electrical and Telecommunications Engineering Technology TEL (718) 260-5300 - FAX:
NEW YORK CITY COLLEGE OF TECHNOLOGY The City University of New York 300 Jay Street Brooklyn, NY 11201-2983 Department of Electrical and Telecommunications Engineering Technology TEL (718) 260-5300 - FAX:
ECEN 420 LINEAR CONTROL SYSTEMS. Instructor: S. P. Bhattacharyya* (Dr. B.) 1/18
 1/18") ECEN 420 LINEAR CONTROL SYSTEMS Instructor: S. P. Bhattacharyya* (Dr. B.) 1/18 Course information Course Duration: 14 weeks Divided into 7 units, each of two weeks duration, 5 lectures, 1 test Each unit
ECEN 420 LINEAR CONTROL SYSTEMS Instructor: S. P. Bhattacharyya* (Dr. B.) 1/18 Course information Course Duration: 14 weeks Divided into 7 units, each of two weeks duration, 5 lectures, 1 test Each unit
Topic # Feedback Control Systems
 Topic #1 16.31 Feedback Control Systems Motivation Basic Linear System Response Fall 2007 16.31 1 1 16.31: Introduction r(t) e(t) d(t) y(t) G c (s) G(s) u(t) Goal: Design a controller G c (s) so that the
Topic #1 16.31 Feedback Control Systems Motivation Basic Linear System Response Fall 2007 16.31 1 1 16.31: Introduction r(t) e(t) d(t) y(t) G c (s) G(s) u(t) Goal: Design a controller G c (s) so that the
Modeling and Control Overview
 Modeling and Control Overview D R. T A R E K A. T U T U N J I A D V A N C E D C O N T R O L S Y S T E M S M E C H A T R O N I C S E N G I N E E R I N G D E P A R T M E N T P H I L A D E L P H I A U N I
Modeling and Control Overview D R. T A R E K A. T U T U N J I A D V A N C E D C O N T R O L S Y S T E M S M E C H A T R O N I C S E N G I N E E R I N G D E P A R T M E N T P H I L A D E L P H I A U N I
Control of Mobile Robots
 Control of Mobile Robots Regulation and trajectory tracking Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Organization and
Control of Mobile Robots Regulation and trajectory tracking Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Organization and
Table of Laplacetransform
 Appendix Table of Laplacetransform pairs 1(t) f(s) oct), unit impulse at t = 0 a, a constant or step of magnitude a at t = 0 a s t, a ramp function e- at, an exponential function s + a sin wt, a sine fun
Appendix Table of Laplacetransform pairs 1(t) f(s) oct), unit impulse at t = 0 a, a constant or step of magnitude a at t = 0 a s t, a ramp function e- at, an exponential function s + a sin wt, a sine fun
AMSC/MATH 673, CLASSICAL METHODS IN PDE, FALL Required text: Evans, Partial Differential Equations second edition
 AMSC/MATH 673, CLASSICAL METHODS IN PDE, FALL 2018. MWF 2:00pm - 2:50pm MTH 0407 Instructor: M. Machedon Office: MTH 3311 e-mail: mxm@math.umd.edu Required text: Evans, Partial Differential Equations second
AMSC/MATH 673, CLASSICAL METHODS IN PDE, FALL 2018. MWF 2:00pm - 2:50pm MTH 0407 Instructor: M. Machedon Office: MTH 3311 e-mail: mxm@math.umd.edu Required text: Evans, Partial Differential Equations second
Process Modelling, Identification, and Control
 Jan Mikles Miroslav Fikar Process Modelling, Identification, and Control With 187 Figures and 13 Tables 4u Springer Contents 1 Introduction 1 1.1 Topics in Process Control 1 1.2 An Example of Process Control
Jan Mikles Miroslav Fikar Process Modelling, Identification, and Control With 187 Figures and 13 Tables 4u Springer Contents 1 Introduction 1 1.1 Topics in Process Control 1 1.2 An Example of Process Control
Fall 線性系統 Linear Systems. Chapter 08 State Feedback & State Estimators (SISO) Feng-Li Lian. NTU-EE Sep07 Jan08
 Feng-Li Lian. NTU-EE Sep07 Jan08") Fall 2007 線性系統 Linear Systems Chapter 08 State Feedback & State Estimators (SISO) Feng-Li Lian NTU-EE Sep07 Jan08 Materials used in these lecture notes are adopted from Linear System Theory & Design, 3rd.
Fall 2007 線性系統 Linear Systems Chapter 08 State Feedback & State Estimators (SISO) Feng-Li Lian NTU-EE Sep07 Jan08 Materials used in these lecture notes are adopted from Linear System Theory & Design, 3rd.
Supplementary Section D: Additional Material Relating to Helicopter Flight Mechanics Models for the Case Study of Chapter 10.
 Supplementary Section D: Additional Material Relating to Helicopter Flight Mechanics Models for the Case Study of Chapter 1. D1 Nonlinear Flight-Mechanics Models and their Linearisation D1.1 Introduction
Supplementary Section D: Additional Material Relating to Helicopter Flight Mechanics Models for the Case Study of Chapter 1. D1 Nonlinear Flight-Mechanics Models and their Linearisation D1.1 Introduction
Lecture 1: Feedback Control Loop
 Lecture : Feedback Control Loop Loop Transfer function The standard feedback control system structure is depicted in Figure. This represend(t) n(t) r(t) e(t) u(t) v(t) η(t) y(t) F (s) C(s) P (s) Figure
Lecture : Feedback Control Loop Loop Transfer function The standard feedback control system structure is depicted in Figure. This represend(t) n(t) r(t) e(t) u(t) v(t) η(t) y(t) F (s) C(s) P (s) Figure
Deposited on: 12 th July 2012
 Murray-Smith, D.J. The application of parameter sensitivity analysis methods to inverse simulation models.mathematical and Computer Modelling of Dynamical Systems. ISSN 1744-551 http://eprints.gla.ac.uk/66832/
Murray-Smith, D.J. The application of parameter sensitivity analysis methods to inverse simulation models.mathematical and Computer Modelling of Dynamical Systems. ISSN 1744-551 http://eprints.gla.ac.uk/66832/
Control Systems Design
 ELEC4410 Control Systems Design Lecture 13: Stability Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science Lecture 13: Stability p.1/20 Outline Input-Output
ELEC4410 Control Systems Design Lecture 13: Stability Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science Lecture 13: Stability p.1/20 Outline Input-Output
Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam!
 To be returned at the end of the exam!") Prüfung Regelungstechnik I (Control Systems I) Prof. Dr. Lino Guzzella 3.. 24 Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam! Do not mark up this translation aid -
Prüfung Regelungstechnik I (Control Systems I) Prof. Dr. Lino Guzzella 3.. 24 Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam! Do not mark up this translation aid -
Copyrighted Material. 1.1 Large-Scale Interconnected Dynamical Systems
 Chapter One Introduction 1.1 Large-Scale Interconnected Dynamical Systems Modern complex dynamical systems 1 are highly interconnected and mutually interdependent, both physically and through a multitude
Chapter One Introduction 1.1 Large-Scale Interconnected Dynamical Systems Modern complex dynamical systems 1 are highly interconnected and mutually interdependent, both physically and through a multitude
Andrea Zanchettin Automatic Control AUTOMATIC CONTROL. Andrea M. Zanchettin, PhD Spring Semester, Linear systems (frequency domain)
") 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Spring Semester, 2018 Linear systems (frequency domain) 2 Motivations Consider an LTI system Thanks to the Lagrange s formula we can compute the motion of
1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Spring Semester, 2018 Linear systems (frequency domain) 2 Motivations Consider an LTI system Thanks to the Lagrange s formula we can compute the motion of
Aircraft Stability & Control
 Aircraft Stability & Control Textbook Automatic control of Aircraft and missiles 2 nd Edition by John H Blakelock References Aircraft Dynamics and Automatic Control - McRuler & Ashkenas Aerodynamics, Aeronautics
Aircraft Stability & Control Textbook Automatic control of Aircraft and missiles 2 nd Edition by John H Blakelock References Aircraft Dynamics and Automatic Control - McRuler & Ashkenas Aerodynamics, Aeronautics
Control Systems I. Lecture 2: Modeling and Linearization. Suggested Readings: Åström & Murray Ch Jacopo Tani
 Control Systems I Lecture 2: Modeling and Linearization Suggested Readings: Åström & Murray Ch. 2-3 Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 28, 2018 J. Tani, E.
Control Systems I Lecture 2: Modeling and Linearization Suggested Readings: Åström & Murray Ch. 2-3 Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 28, 2018 J. Tani, E.
Department of Electrical and Telecommunications Engineering Technology TEL (718) FAX: (718) Courses Description:
 FAX: (718) Courses Description:") NEW YORK CITY COLLEGE OF TECHNOLOGY The City University of New York 300 Jay Street Brooklyn, NY 11201-2983 Department of Electrical and Telecommunications Engineering Technology TEL (718) 260-5300 - FAX:
NEW YORK CITY COLLEGE OF TECHNOLOGY The City University of New York 300 Jay Street Brooklyn, NY 11201-2983 Department of Electrical and Telecommunications Engineering Technology TEL (718) 260-5300 - FAX:
Nonlinear Adaptive Robust Control. Theory and Applications to the Integrated Design of Intelligent and Precision Mechatronic Systems.
 A Short Course on Nonlinear Adaptive Robust Control Theory and Applications to the Integrated Design of Intelligent and Precision Mechatronic Systems Bin Yao Intelligent and Precision Control Laboratory
A Short Course on Nonlinear Adaptive Robust Control Theory and Applications to the Integrated Design of Intelligent and Precision Mechatronic Systems Bin Yao Intelligent and Precision Control Laboratory
Contents lecture 6 2(17) Automatic Control III. Summary of lecture 5 (I/III) 3(17) Summary of lecture 5 (II/III) 4(17) H 2, H synthesis pros and cons:
 Automatic Control III. Summary of lecture 5 (I/III) 3(17) Summary of lecture 5 (II/III) 4(17) H 2, H synthesis pros and cons:") Contents lecture 6 (7) Automatic Control III Lecture 6 Linearization and phase portraits. Summary of lecture 5 Thomas Schön Division of Systems and Control Department of Information Technology Uppsala
Contents lecture 6 (7) Automatic Control III Lecture 6 Linearization and phase portraits. Summary of lecture 5 Thomas Schön Division of Systems and Control Department of Information Technology Uppsala
Graphical user interface for input output characterization of single variable and multivariable highly nonlinear systems
 Graphical user interface for input output characterization of single variable and multivariable highly nonlinear systems M. D. Shahrukh Adnan Khan 1,2, Sharsad Kara Kuni 2, G. K. M. Sadikul Amin 3, Mukul
Graphical user interface for input output characterization of single variable and multivariable highly nonlinear systems M. D. Shahrukh Adnan Khan 1,2, Sharsad Kara Kuni 2, G. K. M. Sadikul Amin 3, Mukul
Control System Design
 ELEC ENG 4CL4: Control System Design Notes for Lecture #11 Wednesday, January 28, 2004 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Relative Stability: Stability
ELEC ENG 4CL4: Control System Design Notes for Lecture #11 Wednesday, January 28, 2004 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Relative Stability: Stability
SRM UNIVERSITY DEPARTMENT OF BIOMEDICAL ENGINEERING ODD Semester DAY floor
 SRM UNIVERSITY DEPARTMENT OF BIOMEDICAL ENGINEERING ODD Semester-2014-2015 CONTROL SYSTEMS Course Code: Course Title: Control Systems Semester: V SEM B. Tech Third Year Course Timings: STAFF NAME: Anitha.G
SRM UNIVERSITY DEPARTMENT OF BIOMEDICAL ENGINEERING ODD Semester-2014-2015 CONTROL SYSTEMS Course Code: Course Title: Control Systems Semester: V SEM B. Tech Third Year Course Timings: STAFF NAME: Anitha.G
Multi-layer Flight Control Synthesis and Analysis of a Small-scale UAV Helicopter
 Multi-layer Flight Control Synthesis and Analysis of a Small-scale UAV Helicopter Ali Karimoddini, Guowei Cai, Ben M. Chen, Hai Lin and Tong H. Lee Graduate School for Integrative Sciences and Engineering,
Multi-layer Flight Control Synthesis and Analysis of a Small-scale UAV Helicopter Ali Karimoddini, Guowei Cai, Ben M. Chen, Hai Lin and Tong H. Lee Graduate School for Integrative Sciences and Engineering,
1 Loop Control. 1.1 Open-loop. ISS0065 Control Instrumentation
 Lecture 4 ISS0065 Control Instrumentation 1 Loop Control System has a continuous signal (analog) basic notions: open-loop control, close-loop control. 1.1 Open-loop Open-loop / avatud süsteem / открытая
Lecture 4 ISS0065 Control Instrumentation 1 Loop Control System has a continuous signal (analog) basic notions: open-loop control, close-loop control. 1.1 Open-loop Open-loop / avatud süsteem / открытая
Introduction to Systems Theory and Control Systems
 Introduction to Systems Theory and Control Systems Paula Raica Department of Automation Dorobantilor Str., room C21, tel: 0264-401267 Baritiu Str., room C14, tel: 0264-202368 email: Paula.Raica@aut.utcluj.ro
Introduction to Systems Theory and Control Systems Paula Raica Department of Automation Dorobantilor Str., room C21, tel: 0264-401267 Baritiu Str., room C14, tel: 0264-202368 email: Paula.Raica@aut.utcluj.ro
DISTURBANCE OBSERVER BASED CONTROL: CONCEPTS, METHODS AND CHALLENGES
 DISTURBANCE OBSERVER BASED CONTROL: CONCEPTS, METHODS AND CHALLENGES Wen-Hua Chen Professor in Autonomous Vehicles Department of Aeronautical and Automotive Engineering Loughborough University 1 Outline
DISTURBANCE OBSERVER BASED CONTROL: CONCEPTS, METHODS AND CHALLENGES Wen-Hua Chen Professor in Autonomous Vehicles Department of Aeronautical and Automotive Engineering Loughborough University 1 Outline
ECE 516: System Control Engineering
 ECE 516: System Control Engineering This course focuses on the analysis and design of systems control. This course will introduce time-domain systems dynamic control fundamentals and their design issues
ECE 516: System Control Engineering This course focuses on the analysis and design of systems control. This course will introduce time-domain systems dynamic control fundamentals and their design issues
Alireza Mousavi Brunel University
 Alireza Mousavi Brunel University 1 » Online Lecture Material at (www.brunel.ac.uk/~emstaam)» C. W. De Silva, Modelling and Control of Engineering Systems, CRC Press, Francis & Taylor, 2009.» M. P. Groover,
Alireza Mousavi Brunel University 1 » Online Lecture Material at (www.brunel.ac.uk/~emstaam)» C. W. De Silva, Modelling and Control of Engineering Systems, CRC Press, Francis & Taylor, 2009.» M. P. Groover,
Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam!
 To be returned at the end of the exam!") Prüfung Regelungstechnik I (Control Systems I) Prof. Dr. Lino Guzzella 3. 8. 24 Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam! Do not mark up this translation aid
Prüfung Regelungstechnik I (Control Systems I) Prof. Dr. Lino Guzzella 3. 8. 24 Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam! Do not mark up this translation aid
Modification of a Sophomore Linear Systems Course to Reflect Modern Computing Strategies
 Session 3220 Modification of a Sophomore Linear Systems Course to Reflect Modern Computing Strategies Raymond G. Jacquot, Jerry C. Hamann, John E. McInroy Electrical Engineering Department, University
Session 3220 Modification of a Sophomore Linear Systems Course to Reflect Modern Computing Strategies Raymond G. Jacquot, Jerry C. Hamann, John E. McInroy Electrical Engineering Department, University
Feedback Control CONTROL THEORY FUNDAMENTALS. Feedback Control: A History. Feedback Control: A History (contd.) Anuradha Annaswamy
 Anuradha Annaswamy") Feedback Control CONTROL THEORY FUNDAMENTALS Actuator Sensor + Anuradha Annaswamy Active adaptive Control Laboratory Massachusetts Institute of Technology must follow with» Speed» Accuracy Feeback: Measure
Feedback Control CONTROL THEORY FUNDAMENTALS Actuator Sensor + Anuradha Annaswamy Active adaptive Control Laboratory Massachusetts Institute of Technology must follow with» Speed» Accuracy Feeback: Measure
Application of Adaptive Thresholds in Robust Fault Detection of an Electro- Mechanical Single-Wheel Steering Actuator
 Preprints of the 8th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes (SAFEPROCESS) August 29-31, 212. Mexico City, Mexico Application of Adaptive Thresholds in Robust Fault
Preprints of the 8th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes (SAFEPROCESS) August 29-31, 212. Mexico City, Mexico Application of Adaptive Thresholds in Robust Fault
A FEEDBACK STRUCTURE WITH HIGHER ORDER DERIVATIVES IN REGULATOR. Ryszard Gessing
 A FEEDBACK STRUCTURE WITH HIGHER ORDER DERIVATIVES IN REGULATOR Ryszard Gessing Politechnika Śl aska Instytut Automatyki, ul. Akademicka 16, 44-101 Gliwice, Poland, fax: +4832 372127, email: gessing@ia.gliwice.edu.pl
A FEEDBACK STRUCTURE WITH HIGHER ORDER DERIVATIVES IN REGULATOR Ryszard Gessing Politechnika Śl aska Instytut Automatyki, ul. Akademicka 16, 44-101 Gliwice, Poland, fax: +4832 372127, email: gessing@ia.gliwice.edu.pl
Linear State Feedback Controller Design
 Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
6.241 Dynamic Systems and Control
 6.241 Dynamic Systems and Control Lecture 17: Robust Stability Readings: DDV, Chapters 19, 20 Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology April 6, 2011 E. Frazzoli
6.241 Dynamic Systems and Control Lecture 17: Robust Stability Readings: DDV, Chapters 19, 20 Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology April 6, 2011 E. Frazzoli
Dr Ian R. Manchester
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
AE 200 Engineering Analysis and Control of Aerospace Systems
 Instructor Info Credit Class Days / Time Office Location: ENG 272C Office Hours: Monday 4:00pm 6:30pm Email: kamran.turkoglu@sjsu.edu 3 units Tuesday, 6:00pm 8:45pm Classroom CL 222 Prerequisites TA: Contact
Instructor Info Credit Class Days / Time Office Location: ENG 272C Office Hours: Monday 4:00pm 6:30pm Email: kamran.turkoglu@sjsu.edu 3 units Tuesday, 6:00pm 8:45pm Classroom CL 222 Prerequisites TA: Contact
DIPARTIMENTO DI INGEGNERIA MECCANICA E AEROSPAZIALE - DIMEAS
 DIPARTIMENTO DI INGEGNERIA MECCANICA E AEROSPAZIALE - DIMEAS COURSE TITLE: INSTRUCTOR: COURSE LEVEL: [LIVELLO DI CORSO: Navigation and Control of Unmanned Aerial Vehicles (UAVs): A Comprehensive Approach
DIPARTIMENTO DI INGEGNERIA MECCANICA E AEROSPAZIALE - DIMEAS COURSE TITLE: INSTRUCTOR: COURSE LEVEL: [LIVELLO DI CORSO: Navigation and Control of Unmanned Aerial Vehicles (UAVs): A Comprehensive Approach
Exam in Systems Engineering/Process Control
 Department of AUTOMATIC CONTROL Exam in Systems Engineering/Process Control 27-6-2 Points and grading All answers must include a clear motivation. Answers may be given in English or Swedish. The total
Department of AUTOMATIC CONTROL Exam in Systems Engineering/Process Control 27-6-2 Points and grading All answers must include a clear motivation. Answers may be given in English or Swedish. The total
Exam. 135 minutes + 15 minutes reading time
 Exam January 23, 27 Control Systems I (5-59-L) Prof. Emilio Frazzoli Exam Exam Duration: 35 minutes + 5 minutes reading time Number of Problems: 45 Number of Points: 53 Permitted aids: Important: 4 pages
Exam January 23, 27 Control Systems I (5-59-L) Prof. Emilio Frazzoli Exam Exam Duration: 35 minutes + 5 minutes reading time Number of Problems: 45 Number of Points: 53 Permitted aids: Important: 4 pages
ANALYSIS OF AUTOPILOT SYSTEM BASED ON BANK ANGLE OF SMALL UAV
 ANALYSIS OF AUTOPILOT SYSTEM BASED ON BANK ANGLE OF SMALL UAV MAY SAN HLAING, ZAW MIN NAING, 3 MAUNG MAUNG LATT, 4 HLA MYO TUN,4 Department of Electronic Engineering, Mandalay Technological University,
ANALYSIS OF AUTOPILOT SYSTEM BASED ON BANK ANGLE OF SMALL UAV MAY SAN HLAING, ZAW MIN NAING, 3 MAUNG MAUNG LATT, 4 HLA MYO TUN,4 Department of Electronic Engineering, Mandalay Technological University,
Dr Ian R. Manchester Dr Ian R. Manchester AMME 3500 : Root Locus
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
An Iteration-Domain Filter for Controlling Transient Growth in Iterative Learning Control
 21 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 3-July 2, 21 WeC14.1 An Iteration-Domain Filter for Controlling Transient Growth in Iterative Learning Control Qing Liu and Douglas
21 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 3-July 2, 21 WeC14.1 An Iteration-Domain Filter for Controlling Transient Growth in Iterative Learning Control Qing Liu and Douglas
MIMO analysis: loop-at-a-time
 MIMO robustness MIMO analysis: loop-at-a-time y 1 y 2 P (s) + + K 2 (s) r 1 r 2 K 1 (s) Plant: P (s) = 1 s 2 + α 2 s α 2 α(s + 1) α(s + 1) s α 2. (take α = 10 in the following numerical analysis) Controller:
MIMO robustness MIMO analysis: loop-at-a-time y 1 y 2 P (s) + + K 2 (s) r 1 r 2 K 1 (s) Plant: P (s) = 1 s 2 + α 2 s α 2 α(s + 1) α(s + 1) s α 2. (take α = 10 in the following numerical analysis) Controller:
An Overview on Robust Control
 Advanced Control An Overview on Robust Control P C Scope Keywords Prerequisites allow the student to assess the potential of different methods in robust control without entering deep into theory. Sensitize
Advanced Control An Overview on Robust Control P C Scope Keywords Prerequisites allow the student to assess the potential of different methods in robust control without entering deep into theory. Sensitize
Statistical modelling: Theory and practice
 Statistical modelling: Theory and practice Introduction Gilles Guillot gigu@dtu.dk August 27, 2013 Gilles Guillot (gigu@dtu.dk) Stat. modelling August 27, 2013 1 / 6 Schedule 13 weeks weekly time slot:
Statistical modelling: Theory and practice Introduction Gilles Guillot gigu@dtu.dk August 27, 2013 Gilles Guillot (gigu@dtu.dk) Stat. modelling August 27, 2013 1 / 6 Schedule 13 weeks weekly time slot:
Raktim Bhattacharya. . AERO 632: Design of Advance Flight Control System. Preliminaries
 . AERO 632: of Advance Flight Control System. Preliminaries Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. Preliminaries Signals & Systems Laplace
. AERO 632: of Advance Flight Control System. Preliminaries Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. Preliminaries Signals & Systems Laplace
A Comparative Study on Automatic Flight Control for small UAV
 Proceedings of the 5 th International Conference of Control, Dynamic Systems, and Robotics (CDSR'18) Niagara Falls, Canada June 7 9, 18 Paper No. 13 DOI: 1.11159/cdsr18.13 A Comparative Study on Automatic
Proceedings of the 5 th International Conference of Control, Dynamic Systems, and Robotics (CDSR'18) Niagara Falls, Canada June 7 9, 18 Paper No. 13 DOI: 1.11159/cdsr18.13 A Comparative Study on Automatic
MA201: Further Mathematical Methods (Linear Algebra) 2002
 2002") MA201: Further Mathematical Methods (Linear Algebra) 2002 General Information Teaching This course involves two types of teaching session that you should be attending: Lectures This is a half unit course
MA201: Further Mathematical Methods (Linear Algebra) 2002 General Information Teaching This course involves two types of teaching session that you should be attending: Lectures This is a half unit course
Introduction to. Process Control. Ahmet Palazoglu. Second Edition. Jose A. Romagnoli. CRC Press. Taylor & Francis Group. Taylor & Francis Group,
 Introduction to Process Control Second Edition Jose A. Romagnoli Ahmet Palazoglu CRC Press Taylor & Francis Group Boca Raton London NewYork CRC Press is an imprint of the Taylor & Francis Group, an informa
Introduction to Process Control Second Edition Jose A. Romagnoli Ahmet Palazoglu CRC Press Taylor & Francis Group Boca Raton London NewYork CRC Press is an imprint of the Taylor & Francis Group, an informa