Alireza Mousavi Brunel University
|
|
|
- Allan Houston
- 5 years ago
- Views:
Transcription

1 Alireza Mousavi Brunel University 1
2 » Online Lecture Material at ( C. W. De Silva, Modelling and Control of Engineering Systems, CRC Press, Francis & Taylor, 2009.» M. P. Groover, Automation, Production Systems, and Computer Integrated Manufacturing, 3 rd Edition, Pearson International, 2007.» Mechatronics: electronic control systems in mechanical and electrical engineering, W. Bolton, 4 th Edition, Pearson Education Ltd,
3 The aim of this module is to introduce students to the concepts, principles, infrastructure, technologies, and implementation of embedded and industrial control systems. 3
4 1. Gain knowledge and understanding of the fundamentals of modelling and control of engineering systems. 2. Utilise the principles of control system in design, implementation and test of systems instructions on artefacts 3. Insight to sensors, actuators I/O devices and digital systems 4. Critically evaluate and compare various control methods for implementation on artifact design as well as strategies for monitoring and automation of systems. 5. Implementation and installation of electronic controls on electromechanical artefacts. 6. Utilise the knowledge and skills acquired in the theoretical part of the module to design and implement or interpret various automation configurations in the Automation and Control Laboratory. 4
5 » Lectures on Theory (40% on the module content)» Practical Laboratory Exercises (60% of the module content) 5
6 1. Assignment (artefact) embedded systems including demonstrator and 1500 word report. Submission Deadline: 14/02/14 2. Assignment (sensors, actuators and systems monitoring), demonstrator and 1500 word report Submission Deadline: 14/03/14 3. Assignment (Industrial Automation, Programmable Logic Controllers, Industrial network) demonstrator and 2000 word report on the final project Submission Deadline: 21/04/14 6
7 » Modelling and Control of Engineering Systems Principles of control engineering, Application areas, Dynamic systems, Linearisation, and Transfer Functions» Sensors, Actuators and Microcontrollers Analog-to-digital conversion, digital-to-analog conversion, and I/O devices for discrete data 7
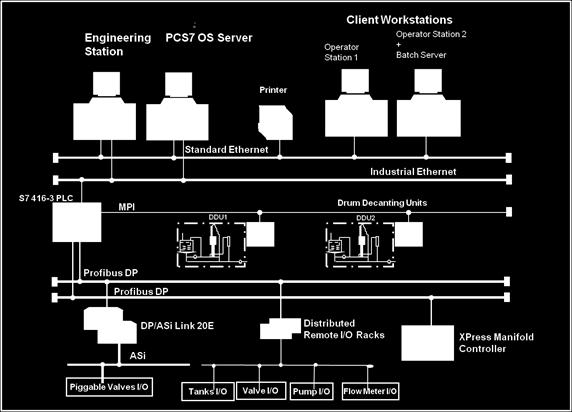
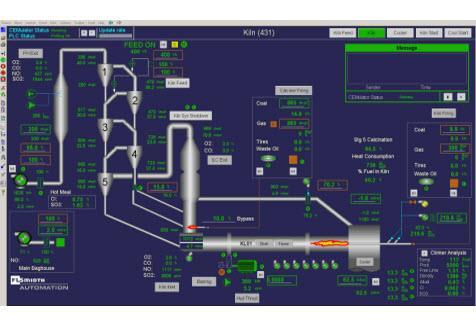
8 » Industrial Monitoring and Control Systems Enabling suite of technologies for research and industrial applications for example (National Instruments suite of technologies for system monitoring and control), and Introduction to industrial controllers such as Programmable Logic Controllers, Industrial networks (i.e. Ethernet, Control Net, OPC) emulating a real plant scenarios.» Applied Industrial Control and Automation Embedded system, Industrial networks set-up, systems logics, and systems integration 8
9 1. Modelling and Evaluation of Control Systems: Use of simulation software tools to estimate the accuracy, responsiveness, stable, noise handling, sufficiently sensitive to input signals. 2. Application of Control principals in the real world: Use sensors, actuators, controller, communication network to meet the functional and processing specifications (Artefact or Plant) The emphasis will be on the latter 9

10 10


11 11

12 12
13 » System: A set of interacting components that seek a common goal. Input Process Output Systems State Environment The state (behaviour) of the system is often described by a variable or by a series of variables 13
14 » Control: The process of causing the variables of a system to conform to a desired value.» Controller: The purpose of a controller is to make a system behave in a desired manner.» Control Engineering: Design and development of the tools and techniques to measure system parameters and ensure that they conform to the required specifications. 14
15 » Automation and Robotics» Transport Systems» Distribution Systems (Power and Water)» Mechatronics» Manufacturing» Medical Devices» Aerospace» Defence and many more 15
16 Control systems are built for 4 main reasons:» power amplification e.g. radar antennas» remote control e.g. robot arms» convenience of input form e.g. room temperature control (thermostat setting Þ heat)» compensation for disturbances e.g. room temperature control (effect of opening a window) radar antenna (effect of wind etc.) 16
17 » water clock (Persians and Greek, 300BC) required constant rate of water trickle achieved by float valve» Drebbel s incubator 1620 constant Temperature damper riser water alcohol fire mercury 17
18 » Flyball governor - James Watt, 1788 maintaining fixed speed on a steam engine so the speed is maintained constant regulation As the speed increases, the flyballs rise This closes a steam valve to the engine» stability stabilization James Clerk Maxwell, 1868 beginnings of modern control theory derived conditions for stability in simple cases 18
19 » Followed by E.R. Routh - more general conditions for stability Frequency response Amplifiers needed for long distance communication in the 1920/30 s the distortion they introduced was too great» Black proposed the feedback amplifier» but the problem of instability arose again» Bode and Nyquist introduced analysis based on frequency response Proportional + Integral + Derivative Control automatic ship steering» Sperry Gyroscope Co. 1922» Root Locus - W.R. Evans, 1948 Graphical technique suitable for analysis and design developed for guidance and control of aircraft» Zadeh 1965 Fuzzy controllers» Mechatronics and Microelectromechanical (MEMS) 1990s 19
20 » What defines dynamic system is the change (non-negligible) to systems parameters in time behaviour state» Systems Modelling and Simulation for the purpose of: Understanding the behaviour in time Conduct what if scenarios Build if it does not exist. 20
21 » Physical Models (prototypes)» Analytical Models (e.g. Differential Equations)» Numerical Models» Experimental Models Representation (Describing) system in mathematical terms 21
22 Response of an Analytical model to a physical input (excitations): 1. Time Domain: the response metric is expressed as a function of time time denoted by t is the independent variable 2. Frequency Domain: the amplitude and the phase angle of response is expressed as a function of frequency frequency denoted by ω is the independent variable. 22
23 Laplace transform of output variable Transfer Function = Laplace transform of input variable e.g. mobility, admittance, impedance, and transmissibility 23
24 » Superposition Principle states that: all linear systems outputs at a given time and place caused by two or more input (excitation) is the sum of the responses which would have been caused by each individual input. F x 1 + x 2 + x 3 + = F x 1 + F x 2 + (superposition) Input u 1 System Output y 1 Input u 2 System Output y 2 Input a 1 u 1 + a 2 u 2 System Output a 1 y 1 + a 2 y 2 24
25 » Linear Systems Interchangeability: sequentially component of system can be interchanged without affecting the output for a given input. (parallel system?) u System A y System B y u System B y System A y 25
26 a mass M f f fric Newton s second law: f f fric = Ma frictional retarding force e.g. air resistance Assume that frictional force is proportional to velocity (viscose friction) f fric = Bv where B is the damping constant Therefore : f Bv = M dv dt or dv dt + B M v t = 1 M f(t) First order linear differential equation 1st order because the highest derivative is the 1st derivative 26
27 » the car: dv dt B M v t 1 M f t» Include a function of time x(t) x t dv dt B M x t v t 1 M x t f t (1)» Choose such that x t dv dt B M x t v t d dt x t v t x t dv dt dx dt v t 27
28 » To find x(t) note that dx dt v t B M x t v t» Separating the variables gives 1 x dx B M dt» Integrating both sides with appropriate limits: x t 1 x dx B t M d x 0 x t B log e x x 0 M t 0 log e x t log e x 0 B M t x t log e x 0 0 B M t where t is an integrating variable. 28
29 Expressing both sides to the power e: e x t x 0 B M t from which x t x 0 B e M t Returning to the main proof Eq. (1) becomes d dt x t v t 1 M x t f t substituting for : d dt B e M t x 0 v t 1 B M e M t x 0 f t 29
30 Both sides of the equation can be divided by x(0) d dt B e M t v t 1 B M e M t f t Integrating both sides over the time interval : Evaluating the integrals gives: B or B d em t v t em t v t B d e M t v t B 1 t B em 0 v 0 M e M f d 0 B M e t v t 1v 0 1 M t B e M f d 0 1 B M e M t f t dt So then 30
 depends on f for 0 t i.e. the input signal over the time interval from zero to the present time.")
31 v t e B M t v 0 1 M e B M t t 0 B M e f d» Note the solution has 2 parts:» free response (zero input) due to initial conditions; always represents stored energy» forced response (zero state) depends on f for 0 t i.e. the input signal over the time interval from zero to the present time. 31
32 » Mechanical» Electrical» Thermal Models (energy storage and dissipation factors)» Fluid 32
33 » Across Variables: are measured across an element as the difference between the two ends (e.g. velocity, temperature, voltage, pressure)» Through Variables: are constant properties that flows throughout the element (e.g. force, current, flow, heat transfer rates)» Pending the most appropriate representation of the state variable of an element, the element can be A-type or T-type (for example in Mechanical system mass is A- type and spring is T-type) 33
34 » Inertia Remember: f = M dv (1) dt Power = fv = rate of change of energy E = fv dt = M dv dt v dt = Mv dv (2) Kenetic Energy E = 1 2 Mv2 34
35 » By Integrating equation (2): v t = 1 m t fdt 0 + v(0 ) (3) Whilst t = 0 + and as long as force f is finite: Instant just after t=0 v 0 + = v(0 ) Point of reference f fric m v f 35
36 » Inertia is an energy storage» Velocity can represent the state of inertia, the relationship between velocity and applied can be determined at any time.» Velocity across an inertia element cannot change instantaneously unless an infinite amount of force is applied.» A finite force cannot cause infinite acceleration in an inertia element.» Velocity is an A-Type variable thus inertia is an A-type variable. 36
37 x output k stiffness f=kx v input» Hook s Law: df dt = kv (4)» The energy of spring element can be expressed as: df E = fvdt = f 1 k dt = 1 fdf dt k (5) Or Energy E = 1 2 f 2 k (6) 37
38 We have differentiated the familiar force-deflection Hook s law in order to be consistent with the response/state variable (velocity) Following the same steps as for inertia element, the energy of a spring element can be expressed as:» Also known as potential energy f t = k vdt+f(0)» A spring stiffness element is an energy storage element (elastic potential energy)» Force can represent the state of a stiffness because at any time t the force can be determined. The energy can be represented by f alone.» Force through stiffness cannot change instantaneously unless an infinite velocity is applied.» Force f is the natural response (output) variable and velocity is the natural input.» A spring is T-type. 38
39 v f b f = bv (7) Where b is the damping constant. Either f or v represent its state. 39
40 » Capacitor A-type» Voltage across variable (as its state)» Current through variable» Inductor T-type Energy Storage Differential equations» Resistor as the energy dissipater (algebraic equation) 40
41 C dv dt = i (8) Since power is given by vi, then: E = iv dt = C dv dt = Cv dv (9) Or E = 1 2 Cv2 (10) Electro static energy of a capacitor v t = 1 C t 0 input i dt i + (11) v c - output 41
42 Capacitor element described by differential equation.» Capacitor is an energy storage element» Voltage is the natural response (output) variable. Voltage at any time can be determined with the knowledge of initial voltage and the applied current values. The value of energy can be represented by the variable v alone.» Voltage across capacitor cannot be changed instantaneously unless an infinite current is applied» Voltage is the natural output variable and current is the natural input variable» Since the state variable, voltage, is an across variable, a capacitor is an A-type element. 42
43 L i output input v L di dt = v (12) Energy E = 1 2 Li2 (13) Electromagnetic energy of an inductor: i t = 1 L t 0 vdt + i(0) (14) 43
44 v = Ri (15)» Either current or voltage could define its state» Algebraic equation» No new state variable (Why?) Because the state variables v is represented by an independent capacitor element, and i is established by an independent inductor element. Thus a damper element does not introduce new state. 44
45 1. Aim and Objectives 2. Structure and Assessments (deadlines and course work) 3. Introduction to Industrial Control Systems 4. Basic Electrical and Mechanical Models 45
Index. Index. More information. in this web service Cambridge University Press
 A-type elements, 4 7, 18, 31, 168, 198, 202, 219, 220, 222, 225 A-type variables. See Across variable ac current, 172, 251 ac induction motor, 251 Acceleration rotational, 30 translational, 16 Accumulator,
A-type elements, 4 7, 18, 31, 168, 198, 202, 219, 220, 222, 225 A-type variables. See Across variable ac current, 172, 251 ac induction motor, 251 Acceleration rotational, 30 translational, 16 Accumulator,
(Refer Slide Time: 00:01:30 min)
") Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
Modeling and Control Overview
 Modeling and Control Overview D R. T A R E K A. T U T U N J I A D V A N C E D C O N T R O L S Y S T E M S M E C H A T R O N I C S E N G I N E E R I N G D E P A R T M E N T P H I L A D E L P H I A U N I
Modeling and Control Overview D R. T A R E K A. T U T U N J I A D V A N C E D C O N T R O L S Y S T E M S M E C H A T R O N I C S E N G I N E E R I N G D E P A R T M E N T P H I L A D E L P H I A U N I
Overview of the Seminar Topic
 Overview of the Seminar Topic Simo Särkkä Laboratory of Computational Engineering Helsinki University of Technology September 17, 2007 Contents 1 What is Control Theory? 2 History
Overview of the Seminar Topic Simo Särkkä Laboratory of Computational Engineering Helsinki University of Technology September 17, 2007 Contents 1 What is Control Theory? 2 History
INF5490 RF MEMS. LN03: Modeling, design and analysis. Spring 2008, Oddvar Søråsen Department of Informatics, UoO
 INF5490 RF MEMS LN03: Modeling, design and analysis Spring 2008, Oddvar Søråsen Department of Informatics, UoO 1 Today s lecture MEMS functional operation Transducer principles Sensor principles Methods
INF5490 RF MEMS LN03: Modeling, design and analysis Spring 2008, Oddvar Søråsen Department of Informatics, UoO 1 Today s lecture MEMS functional operation Transducer principles Sensor principles Methods
ET3-7: Modelling II(V) Electrical, Mechanical and Thermal Systems
 Electrical, Mechanical and Thermal Systems") ET3-7: Modelling II(V) Electrical, Mechanical and Thermal Systems Agenda of the Day 1. Resume of lesson I 2. Basic system models. 3. Models of basic electrical system elements 4. Application of Matlab/Simulink
ET3-7: Modelling II(V) Electrical, Mechanical and Thermal Systems Agenda of the Day 1. Resume of lesson I 2. Basic system models. 3. Models of basic electrical system elements 4. Application of Matlab/Simulink
Dr Ian R. Manchester Dr Ian R. Manchester AMME 3500 : Review
 Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
School of Engineering Faculty of Built Environment, Engineering, Technology & Design
 Module Name and Code : ENG60803 Real Time Instrumentation Semester and Year : Semester 5/6, Year 3 Lecture Number/ Week : Lecture 3, Week 3 Learning Outcome (s) : LO5 Module Co-ordinator/Tutor : Dr. Phang
Module Name and Code : ENG60803 Real Time Instrumentation Semester and Year : Semester 5/6, Year 3 Lecture Number/ Week : Lecture 3, Week 3 Learning Outcome (s) : LO5 Module Co-ordinator/Tutor : Dr. Phang
Introduction to Systems Theory and Control Systems
 Introduction to Systems Theory and Control Systems Paula Raica Department of Automation Dorobantilor Str., room C21, tel: 0264-401267 Baritiu Str., room C14, tel: 0264-202368 email: Paula.Raica@aut.utcluj.ro
Introduction to Systems Theory and Control Systems Paula Raica Department of Automation Dorobantilor Str., room C21, tel: 0264-401267 Baritiu Str., room C14, tel: 0264-202368 email: Paula.Raica@aut.utcluj.ro
General procedure for formulation of robot dynamics STEP 1 STEP 3. Module 9 : Robot Dynamics & controls
 Module 9 : Robot Dynamics & controls Lecture 32 : General procedure for dynamics equation forming and introduction to control Objectives In this course you will learn the following Lagrangian Formulation
Module 9 : Robot Dynamics & controls Lecture 32 : General procedure for dynamics equation forming and introduction to control Objectives In this course you will learn the following Lagrangian Formulation
2.004 Dynamics and Control II Spring 2008
 MIT OpenCourseWare http://ocwmitedu 00 Dynamics and Control II Spring 00 For information about citing these materials or our Terms of Use, visit: http://ocwmitedu/terms Massachusetts Institute of Technology
MIT OpenCourseWare http://ocwmitedu 00 Dynamics and Control II Spring 00 For information about citing these materials or our Terms of Use, visit: http://ocwmitedu/terms Massachusetts Institute of Technology
System Modeling. Lecture-2. Emam Fathy Department of Electrical and Control Engineering
 System Modeling Lecture-2 Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 Types of Systems Static System: If a system does not change with time, it is called a static
System Modeling Lecture-2 Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 Types of Systems Static System: If a system does not change with time, it is called a static
EXAMPLE: MODELING THE PT326 PROCESS TRAINER
 CHAPTER 1 By Radu Muresan University of Guelph Page 1 EXAMPLE: MODELING THE PT326 PROCESS TRAINER The PT326 apparatus models common industrial situations in which temperature control is required in the
CHAPTER 1 By Radu Muresan University of Guelph Page 1 EXAMPLE: MODELING THE PT326 PROCESS TRAINER The PT326 apparatus models common industrial situations in which temperature control is required in the
Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
 Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 7 Modeling Modeling is the process of representing the behavior of a real
Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 7 Modeling Modeling is the process of representing the behavior of a real
Section 2.2 : Electromechanical. analogies PHILIPE HERZOG AND GUILLAUME PENELET
 Section 2.2 : Electromechanical analogies PHILIPE HERZOG AND GUILLAUME PENELET Paternité - Pas d'utilisation Commerciale - Partage des Conditions Initiales à l'identique : http://creativecommons.org/licenses/by-nc-sa/2.0/fr/
Section 2.2 : Electromechanical analogies PHILIPE HERZOG AND GUILLAUME PENELET Paternité - Pas d'utilisation Commerciale - Partage des Conditions Initiales à l'identique : http://creativecommons.org/licenses/by-nc-sa/2.0/fr/
Texas A & M University Department of Mechanical Engineering MEEN 364 Dynamic Systems and Controls Dr. Alexander G. Parlos
 Texas A & M University Department of Mechanical Engineering MEEN 364 Dynamic Systems and Controls Dr. Alexander G. Parlos Lecture 5: Electrical and Electromagnetic System Components The objective of this
Texas A & M University Department of Mechanical Engineering MEEN 364 Dynamic Systems and Controls Dr. Alexander G. Parlos Lecture 5: Electrical and Electromagnetic System Components The objective of this
Acceleration Feedback
 Acceleration Feedback Mechanical Engineer Modeling & Simulation Electro- Mechanics Electrical- Electronics Engineer Sensors Actuators Computer Systems Engineer Embedded Control Controls Engineer Mechatronic
Acceleration Feedback Mechanical Engineer Modeling & Simulation Electro- Mechanics Electrical- Electronics Engineer Sensors Actuators Computer Systems Engineer Embedded Control Controls Engineer Mechatronic
Alireza Mousavi Brunel University
 Alireza Mousavi Brunel University 1 » Control Process» Control Systems Design & Analysis 2 Open-Loop Control: Is normally a simple switch on and switch off process, for example a light in a room is switched
Alireza Mousavi Brunel University 1 » Control Process» Control Systems Design & Analysis 2 Open-Loop Control: Is normally a simple switch on and switch off process, for example a light in a room is switched
A system is defined as a combination of components (elements) that act together to perform a certain objective. System dynamics deal with:
 that act together to perform a certain objective. System dynamics deal with:") Chapter 1 Introduction to System Dynamics A. Bazoune 1.1 INTRODUCTION A system is defined as a combination of components (elements) that act together to perform a certain objective. System dynamics deal
Chapter 1 Introduction to System Dynamics A. Bazoune 1.1 INTRODUCTION A system is defined as a combination of components (elements) that act together to perform a certain objective. System dynamics deal
Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2)
") Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2) For all calculations in this book, you can use the MathCad software or any other mathematical software that you are familiar
Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2) For all calculations in this book, you can use the MathCad software or any other mathematical software that you are familiar
ECE2262 Electric Circuit
 ECE2262 Electric Circuit Chapter 7: FIRST AND SECOND-ORDER RL AND RC CIRCUITS Response to First-Order RL and RC Circuits Response to Second-Order RL and RC Circuits 1 2 7.1. Introduction 3 4 In dc steady
ECE2262 Electric Circuit Chapter 7: FIRST AND SECOND-ORDER RL AND RC CIRCUITS Response to First-Order RL and RC Circuits Response to Second-Order RL and RC Circuits 1 2 7.1. Introduction 3 4 In dc steady
Analog Signals and Systems and their properties
 Analog Signals and Systems and their properties Main Course Objective: Recall course objectives Understand the fundamentals of systems/signals interaction (know how systems can transform or filter signals)
Analog Signals and Systems and their properties Main Course Objective: Recall course objectives Understand the fundamentals of systems/signals interaction (know how systems can transform or filter signals)
Modeling Mechanical Systems
 Modeling Mechanical Systems Mechanical systems can be either translational or rotational. Although the fundamental relationships for both types are derived from Newton s law, they are different enough
Modeling Mechanical Systems Mechanical systems can be either translational or rotational. Although the fundamental relationships for both types are derived from Newton s law, they are different enough
Electromagnetic Oscillations and Alternating Current. 1. Electromagnetic oscillations and LC circuit 2. Alternating Current 3.
 Electromagnetic Oscillations and Alternating Current 1. Electromagnetic oscillations and LC circuit 2. Alternating Current 3. RLC circuit in AC 1 RL and RC circuits RL RC Charging Discharging I = emf R
Electromagnetic Oscillations and Alternating Current 1. Electromagnetic oscillations and LC circuit 2. Alternating Current 3. RLC circuit in AC 1 RL and RC circuits RL RC Charging Discharging I = emf R
Reglerteknik, TNG028. Lecture 1. Anna Lombardi
 Reglerteknik, TNG028 Lecture 1 Anna Lombardi Today lecture We will try to answer the following questions: What is automatic control? Where can we nd automatic control? Why do we need automatic control?
Reglerteknik, TNG028 Lecture 1 Anna Lombardi Today lecture We will try to answer the following questions: What is automatic control? Where can we nd automatic control? Why do we need automatic control?
INSTRUMENTAL ENGINEERING
 INSTRUMENTAL ENGINEERING Subject Code: IN Course Structure Sections/Units Section A Unit 1 Unit 2 Unit 3 Unit 4 Unit 5 Unit 6 Section B Section C Section D Section E Section F Section G Section H Section
INSTRUMENTAL ENGINEERING Subject Code: IN Course Structure Sections/Units Section A Unit 1 Unit 2 Unit 3 Unit 4 Unit 5 Unit 6 Section B Section C Section D Section E Section F Section G Section H Section
Noise - irrelevant data; variability in a quantity that has no meaning or significance. In most cases this is modeled as a random variable.
 1.1 Signals and Systems Signals convey information. Systems respond to (or process) information. Engineers desire mathematical models for signals and systems in order to solve design problems efficiently
1.1 Signals and Systems Signals convey information. Systems respond to (or process) information. Engineers desire mathematical models for signals and systems in order to solve design problems efficiently
2.5 Translational Mechanical System Transfer Functions 61. FIGURE 2.14 Electric circuit for Skill- Assessment Exercise 2.6
 .5 Translational echanical System Transfer Functions 1 1Ω 1H 1Ω + v(t) + 1 H 1 H v L (t) FIGURE.14 Electric circuit for Skill- Assessment Exercise. ANSWER: V L ðsþ=vðsþ ¼ðs þ s þ 1Þ=ðs þ 5s þ Þ The complete
.5 Translational echanical System Transfer Functions 1 1Ω 1H 1Ω + v(t) + 1 H 1 H v L (t) FIGURE.14 Electric circuit for Skill- Assessment Exercise. ANSWER: V L ðsþ=vðsþ ¼ðs þ s þ 1Þ=ðs þ 5s þ Þ The complete
Modeling and Simulation Revision III D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
 Modeling and Simulation Revision III D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 0 1 4 Block Diagrams Block diagram models consist of two fundamental objects:
Modeling and Simulation Revision III D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 0 1 4 Block Diagrams Block diagram models consist of two fundamental objects:
ELG4112. Electromechanical Systems and Mechatronics
 ELG4112 Electromechanical Systems and Mechatronics 1 Introduction Based on Electromechanical Systems, Electric Machines, and Applied Mechatronics Electromechanical systems integrate the following: Electromechanical
ELG4112 Electromechanical Systems and Mechatronics 1 Introduction Based on Electromechanical Systems, Electric Machines, and Applied Mechatronics Electromechanical systems integrate the following: Electromechanical
Turbines and speed governors
 ELEC0047 - Power system dynamics, control and stability Turbines and speed governors Thierry Van Cutsem t.vancutsem@ulg.ac.be www.montefiore.ulg.ac.be/~vct November 2017 1 / 31 2 / 31 Steam turbines Turbines
ELEC0047 - Power system dynamics, control and stability Turbines and speed governors Thierry Van Cutsem t.vancutsem@ulg.ac.be www.montefiore.ulg.ac.be/~vct November 2017 1 / 31 2 / 31 Steam turbines Turbines
Introduction to Controls
 EE 474 Review Exam 1 Name Answer each of the questions. Show your work. Note were essay-type answers are requested. Answer with complete sentences. Incomplete sentences will count heavily against the grade.
EE 474 Review Exam 1 Name Answer each of the questions. Show your work. Note were essay-type answers are requested. Answer with complete sentences. Incomplete sentences will count heavily against the grade.
B1-1. Closed-loop control. Chapter 1. Fundamentals of closed-loop control technology. Festo Didactic Process Control System
 B1-1 Chapter 1 Fundamentals of closed-loop control technology B1-2 This chapter outlines the differences between closed-loop and openloop control and gives an introduction to closed-loop control technology.
B1-1 Chapter 1 Fundamentals of closed-loop control technology B1-2 This chapter outlines the differences between closed-loop and openloop control and gives an introduction to closed-loop control technology.
SECTION 1.2. DYNAMIC MODELS
 CHAPTER 1 BY RADU MURESAN Page 1 ENGG4420 LECTURE 5 September 16 10 6:47 PM SECTION 1.2. DYNAMIC MODELS A dynamic model is a mathematical description of the process to be controlled. Specifically, a set
CHAPTER 1 BY RADU MURESAN Page 1 ENGG4420 LECTURE 5 September 16 10 6:47 PM SECTION 1.2. DYNAMIC MODELS A dynamic model is a mathematical description of the process to be controlled. Specifically, a set
AC&ST AUTOMATIC CONTROL AND SYSTEM THEORY SYSTEMS AND MODELS. Claudio Melchiorri
 C. Melchiorri (DEI) Automatic Control & System Theory 1 AUTOMATIC CONTROL AND SYSTEM THEORY SYSTEMS AND MODELS Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI)
C. Melchiorri (DEI) Automatic Control & System Theory 1 AUTOMATIC CONTROL AND SYSTEM THEORY SYSTEMS AND MODELS Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI)
ENGG4420 LECTURE 7. CHAPTER 1 BY RADU MURESAN Page 1. September :29 PM
 CHAPTER 1 BY RADU MURESAN Page 1 ENGG4420 LECTURE 7 September 21 10 2:29 PM MODELS OF ELECTRIC CIRCUITS Electric circuits contain sources of electric voltage and current and other electronic elements such
CHAPTER 1 BY RADU MURESAN Page 1 ENGG4420 LECTURE 7 September 21 10 2:29 PM MODELS OF ELECTRIC CIRCUITS Electric circuits contain sources of electric voltage and current and other electronic elements such
Automatic Control Systems. -Lecture Note 15-
 -Lecture Note 15- Modeling of Physical Systems 5 1/52 AC Motors AC Motors Classification i) Induction Motor (Asynchronous Motor) ii) Synchronous Motor 2/52 Advantages of AC Motors i) Cost-effective ii)
-Lecture Note 15- Modeling of Physical Systems 5 1/52 AC Motors AC Motors Classification i) Induction Motor (Asynchronous Motor) ii) Synchronous Motor 2/52 Advantages of AC Motors i) Cost-effective ii)
BIOEN LECTURE 18: VISCOELASTIC MODELS
 BIOEN 326 2013 LECTURE 18: VISCOELASTIC MODELS Definition of Viscoelasticity. Until now, we have looked at time-independent behaviors. This assumed that materials were purely elastic in the conditions
BIOEN 326 2013 LECTURE 18: VISCOELASTIC MODELS Definition of Viscoelasticity. Until now, we have looked at time-independent behaviors. This assumed that materials were purely elastic in the conditions
Electronic Instrumentation
 Electronic Instrumentation Experiment 5 Part A: Bridge Circuit Basics Part B: Analysis using Thevenin Equivalent Part C: Potentiometers and Strain Gauges Agenda Bridge Circuit Introduction Purpose Structure
Electronic Instrumentation Experiment 5 Part A: Bridge Circuit Basics Part B: Analysis using Thevenin Equivalent Part C: Potentiometers and Strain Gauges Agenda Bridge Circuit Introduction Purpose Structure
Chapter three. Mathematical Modeling of mechanical end electrical systems. Laith Batarseh
 Chapter three Mathematical Modeling of mechanical end electrical systems Laith Batarseh 1 Next Previous Mathematical Modeling of mechanical end electrical systems Dynamic system modeling Definition of
Chapter three Mathematical Modeling of mechanical end electrical systems Laith Batarseh 1 Next Previous Mathematical Modeling of mechanical end electrical systems Dynamic system modeling Definition of
Course roadmap. ME451: Control Systems. Example of Laplace transform. Lecture 2 Laplace transform. Laplace transform
 ME45: Control Systems Lecture 2 Prof. Jongeun Choi Department of Mechanical Engineering Michigan State University Modeling Transfer function Models for systems electrical mechanical electromechanical Block
ME45: Control Systems Lecture 2 Prof. Jongeun Choi Department of Mechanical Engineering Michigan State University Modeling Transfer function Models for systems electrical mechanical electromechanical Block
Plan of the Lecture. Today s topic: what is feedback control? past, present, future
 Plan of the Lecture Today s topic: what is feedback control? past, present, future Plan of the Lecture Today s topic: what is feedback control? past, present, future Goal: get comfortable with the idea
Plan of the Lecture Today s topic: what is feedback control? past, present, future Plan of the Lecture Today s topic: what is feedback control? past, present, future Goal: get comfortable with the idea
Lecture 6: Impedance (frequency dependent. resistance in the s- world), Admittance (frequency. dependent conductance in the s- world), and
, Admittance (frequency. dependent conductance in the s- world), and") Lecture 6: Impedance (frequency dependent resistance in the s- world), Admittance (frequency dependent conductance in the s- world), and Consequences Thereof. Professor Ray, what s an impedance? Answers:
Lecture 6: Impedance (frequency dependent resistance in the s- world), Admittance (frequency dependent conductance in the s- world), and Consequences Thereof. Professor Ray, what s an impedance? Answers:
Dr. Ian R. Manchester
 Dr Ian R. Manchester Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus
Dr Ian R. Manchester Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus
Notes for course EE1.1 Circuit Analysis TOPIC 10 2-PORT CIRCUITS
 Objectives: Introduction Notes for course EE1.1 Circuit Analysis 4-5 Re-examination of 1-port sub-circuits Admittance parameters for -port circuits TOPIC 1 -PORT CIRCUITS Gain and port impedance from -port
Objectives: Introduction Notes for course EE1.1 Circuit Analysis 4-5 Re-examination of 1-port sub-circuits Admittance parameters for -port circuits TOPIC 1 -PORT CIRCUITS Gain and port impedance from -port
SCHOOL OF COMPUTING, ENGINEERING AND MATHEMATICS SEMESTER 1 EXAMINATIONS 2012/2013 XE121. ENGINEERING CONCEPTS (Test)
") s SCHOOL OF COMPUTING, ENGINEERING AND MATHEMATICS SEMESTER EXAMINATIONS 202/203 XE2 ENGINEERING CONCEPTS (Test) Time allowed: TWO hours Answer: Attempt FOUR questions only, a maximum of TWO questions
s SCHOOL OF COMPUTING, ENGINEERING AND MATHEMATICS SEMESTER EXAMINATIONS 202/203 XE2 ENGINEERING CONCEPTS (Test) Time allowed: TWO hours Answer: Attempt FOUR questions only, a maximum of TWO questions
FATIMA MICHAEL COLLEGE OF ENGINEERING & TECHNOLOGY
 FATIMA MICHAEL COLLEGE OF ENGINEERING & TECHNOLOGY Senkottai Village, Madurai Sivagangai Main Road, Madurai - 625 020. An ISO 9001:2008 Certified Institution DEPARTMENT OF ELECTRONICS AND COMMUNICATION
FATIMA MICHAEL COLLEGE OF ENGINEERING & TECHNOLOGY Senkottai Village, Madurai Sivagangai Main Road, Madurai - 625 020. An ISO 9001:2008 Certified Institution DEPARTMENT OF ELECTRONICS AND COMMUNICATION
INC 331 Industrial Process Measurement. Instrument Characteristics
 INC 331 Industrial Process Measurement Instrument Characteristics Introduction Measurement is the experimental process of acquiring any quantitative information. When doing a measurement, we compare the
INC 331 Industrial Process Measurement Instrument Characteristics Introduction Measurement is the experimental process of acquiring any quantitative information. When doing a measurement, we compare the
Equivalent Circuits. Henna Tahvanainen. November 4, ELEC-E5610 Acoustics and the Physics of Sound, Lecture 3
 Equivalent Circuits ELEC-E5610 Acoustics and the Physics of Sound, Lecture 3 Henna Tahvanainen Department of Signal Processing and Acoustics Aalto University School of Science and Technology November 4,
Equivalent Circuits ELEC-E5610 Acoustics and the Physics of Sound, Lecture 3 Henna Tahvanainen Department of Signal Processing and Acoustics Aalto University School of Science and Technology November 4,
Lecture 1: Introduction to System Modeling and Control. Introduction Basic Definitions Different Model Types System Identification
 Lecture 1: Introduction to System Modeling and Control Introduction Basic Definitions Different Model Types System Identification What is Mathematical Model? A set of mathematical equations (e.g., differential
Lecture 1: Introduction to System Modeling and Control Introduction Basic Definitions Different Model Types System Identification What is Mathematical Model? A set of mathematical equations (e.g., differential
Electric Circuit Theory
 Electric Circuit Theory Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Chapter 18 Two-Port Circuits Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Contents and Objectives 3 Chapter Contents 18.1 The Terminal Equations
Electric Circuit Theory Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Chapter 18 Two-Port Circuits Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Contents and Objectives 3 Chapter Contents 18.1 The Terminal Equations
2.3 Concept of Active Acoustic Metamaterials
 Active Acoustic Metamaterials 23 2.3 Concept of Active Acoustic Metamaterials In order to understand the concept and the structure of an active acoustic metamaterial, consider the structure of the external
Active Acoustic Metamaterials 23 2.3 Concept of Active Acoustic Metamaterials In order to understand the concept and the structure of an active acoustic metamaterial, consider the structure of the external
System Dynamics for Engineering Students Concepts and Applications
 System Dynamics for Engineering Students Concepts and Applications Nicolae Lobontiu University of Alaska Anchorage "Ж AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE
System Dynamics for Engineering Students Concepts and Applications Nicolae Lobontiu University of Alaska Anchorage "Ж AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE
Subject: Introduction to Process Control. Week 01, Lectures 01 02, Spring Content
 v CHEG 461 : Process Dynamics and Control Subject: Introduction to Process Control Week 01, Lectures 01 02, Spring 2014 Dr. Costas Kiparissides Content 1. Introduction to Process Dynamics and Control 2.
v CHEG 461 : Process Dynamics and Control Subject: Introduction to Process Control Week 01, Lectures 01 02, Spring 2014 Dr. Costas Kiparissides Content 1. Introduction to Process Dynamics and Control 2.
STABILITY OF PNEUMATIC and HYDRAULIC VALVES
 STABILITY OF PNEUMATIC and HYDRAULIC VALVES These three tutorials will not be found in any examination syllabus. They have been added to the web site for engineers seeking knowledge on why valve elements
STABILITY OF PNEUMATIC and HYDRAULIC VALVES These three tutorials will not be found in any examination syllabus. They have been added to the web site for engineers seeking knowledge on why valve elements
Lecture 39. PHYC 161 Fall 2016
 Lecture 39 PHYC 161 Fall 016 Announcements DO THE ONLINE COURSE EVALUATIONS - response so far is < 8 % Magnetic field energy A resistor is a device in which energy is irrecoverably dissipated. By contrast,
Lecture 39 PHYC 161 Fall 016 Announcements DO THE ONLINE COURSE EVALUATIONS - response so far is < 8 % Magnetic field energy A resistor is a device in which energy is irrecoverably dissipated. By contrast,
Lecture 6 mechanical system modeling equivalent mass gears
 M2794.25 Mechanical System Analysis 기계시스템해석 lecture 6,7,8 Dongjun Lee ( 이동준 ) Department of Mechanical & Aerospace Engineering Seoul National University Dongjun Lee Lecture 6 mechanical system modeling
M2794.25 Mechanical System Analysis 기계시스템해석 lecture 6,7,8 Dongjun Lee ( 이동준 ) Department of Mechanical & Aerospace Engineering Seoul National University Dongjun Lee Lecture 6 mechanical system modeling
REUNotes08-CircuitBasics May 28, 2008
 Chapter One Circuits (... introduction here... ) 1.1 CIRCUIT BASICS Objects may possess a property known as electric charge. By convention, an electron has one negative charge ( 1) and a proton has one
Chapter One Circuits (... introduction here... ) 1.1 CIRCUIT BASICS Objects may possess a property known as electric charge. By convention, an electron has one negative charge ( 1) and a proton has one
10 Measurement of Acceleration, Vibration and Shock Transducers
 Chapter 10: Acceleration, Vibration and Shock Measurement Dr. Lufti Al-Sharif (Revision 1.0, 25/5/2008) 1. Introduction This chapter examines the measurement of acceleration, vibration and shock. It starts
Chapter 10: Acceleration, Vibration and Shock Measurement Dr. Lufti Al-Sharif (Revision 1.0, 25/5/2008) 1. Introduction This chapter examines the measurement of acceleration, vibration and shock. It starts
The Inerter Concept and Its Application. Malcolm C. Smith Department of Engineering University of Cambridge U.K.
 Department of Engineering University of Cambridge U.K. Society of Instrument and Control Engineers (SICE) Annual Conference Fukui, Japan 4 August 2003 Plenary Lecture 1 Motivating Example Vehicle Suspension
Department of Engineering University of Cambridge U.K. Society of Instrument and Control Engineers (SICE) Annual Conference Fukui, Japan 4 August 2003 Plenary Lecture 1 Motivating Example Vehicle Suspension
Lecture 19. Measurement of Solid-Mechanical Quantities (Chapter 8) Measuring Strain Measuring Displacement Measuring Linear Velocity
 Measuring Strain Measuring Displacement Measuring Linear Velocity") MECH 373 Instrumentation and Measurements Lecture 19 Measurement of Solid-Mechanical Quantities (Chapter 8) Measuring Strain Measuring Displacement Measuring Linear Velocity Measuring Accepleration and
MECH 373 Instrumentation and Measurements Lecture 19 Measurement of Solid-Mechanical Quantities (Chapter 8) Measuring Strain Measuring Displacement Measuring Linear Velocity Measuring Accepleration and
Game Physics: Basic Concepts
 CMSC 498M: Chapter 8a Game Physics Reading: Game Physics, by David H Eberly, 2004 Physics for Game Developers, by David M Bourg, 2002 Overview: Basic physical quantities: Mass, center of mass, moment of
CMSC 498M: Chapter 8a Game Physics Reading: Game Physics, by David H Eberly, 2004 Physics for Game Developers, by David M Bourg, 2002 Overview: Basic physical quantities: Mass, center of mass, moment of
2.004 Dynamics and Control II Spring 2008
 MT OpenCourseWare http://ocwmitedu 200 Dynamics and Control Spring 200 For information about citing these materials or our Terms of Use, visit: http://ocwmitedu/terms Massachusetts nstitute of Technology
MT OpenCourseWare http://ocwmitedu 200 Dynamics and Control Spring 200 For information about citing these materials or our Terms of Use, visit: http://ocwmitedu/terms Massachusetts nstitute of Technology
COMPOSITE REPRESENTATION OF BOND GRAPHS AND BLOCK DIAGRAMS FOR CONTROLLED SYSTEMS
 COMPOSITE REPRESENTATION OF BOND GRAPHS AND BLOCK DIAGRAMS FOR CONTROLLED SYSTEMS Engr. Lubna Moin Dr. Vali Uddin (e-mail: engr_lubna@yahoo.com) (e-mail v_uddin@hotmail.com) National University of Sciences
COMPOSITE REPRESENTATION OF BOND GRAPHS AND BLOCK DIAGRAMS FOR CONTROLLED SYSTEMS Engr. Lubna Moin Dr. Vali Uddin (e-mail: engr_lubna@yahoo.com) (e-mail v_uddin@hotmail.com) National University of Sciences
Solved Problems. Electric Circuits & Components. 1-1 Write the KVL equation for the circuit shown.
 Solved Problems Electric Circuits & Components 1-1 Write the KVL equation for the circuit shown. 1-2 Write the KCL equation for the principal node shown. 1-2A In the DC circuit given in Fig. 1, find (i)
Solved Problems Electric Circuits & Components 1-1 Write the KVL equation for the circuit shown. 1-2 Write the KCL equation for the principal node shown. 1-2A In the DC circuit given in Fig. 1, find (i)
Modeling of Electrical Elements
 Modeling of Electrical Elements Dr. Bishakh Bhattacharya Professor, Department of Mechanical Engineering IIT Kanpur Joint Initiative of IITs and IISc - Funded by MHRD This Lecture Contains Modeling of
Modeling of Electrical Elements Dr. Bishakh Bhattacharya Professor, Department of Mechanical Engineering IIT Kanpur Joint Initiative of IITs and IISc - Funded by MHRD This Lecture Contains Modeling of
Modeling and Experimentation: Compound Pendulum
 Modeling and Experimentation: Compound Pendulum Prof. R.G. Longoria Department of Mechanical Engineering The University of Texas at Austin Fall 2014 Overview This lab focuses on developing a mathematical
Modeling and Experimentation: Compound Pendulum Prof. R.G. Longoria Department of Mechanical Engineering The University of Texas at Austin Fall 2014 Overview This lab focuses on developing a mathematical
Physics 116A Notes Fall 2004
 Physics 116A Notes Fall 2004 David E. Pellett Draft v.0.9 Notes Copyright 2004 David E. Pellett unless stated otherwise. References: Text for course: Fundamentals of Electrical Engineering, second edition,
Physics 116A Notes Fall 2004 David E. Pellett Draft v.0.9 Notes Copyright 2004 David E. Pellett unless stated otherwise. References: Text for course: Fundamentals of Electrical Engineering, second edition,
Table of Laplacetransform
 Appendix Table of Laplacetransform pairs 1(t) f(s) oct), unit impulse at t = 0 a, a constant or step of magnitude a at t = 0 a s t, a ramp function e- at, an exponential function s + a sin wt, a sine fun
Appendix Table of Laplacetransform pairs 1(t) f(s) oct), unit impulse at t = 0 a, a constant or step of magnitude a at t = 0 a s t, a ramp function e- at, an exponential function s + a sin wt, a sine fun
Lyapunov Design for Controls
 F.L. Lewis, NAI Moncrief-O Donnell Chair, UTA Research Institute (UTARI) The University of Texas at Arlington, USA and Foreign Professor, Chongqing University, China Supported by : China Qian Ren Program,
F.L. Lewis, NAI Moncrief-O Donnell Chair, UTA Research Institute (UTARI) The University of Texas at Arlington, USA and Foreign Professor, Chongqing University, China Supported by : China Qian Ren Program,
EQUIVALENT SINGLE-DEGREE-OF-FREEDOM SYSTEM AND FREE VIBRATION
 1 EQUIVALENT SINGLE-DEGREE-OF-FREEDOM SYSTEM AND FREE VIBRATION The course on Mechanical Vibration is an important part of the Mechanical Engineering undergraduate curriculum. It is necessary for the development
1 EQUIVALENT SINGLE-DEGREE-OF-FREEDOM SYSTEM AND FREE VIBRATION The course on Mechanical Vibration is an important part of the Mechanical Engineering undergraduate curriculum. It is necessary for the development
2. The following diagram illustrates that voltage represents what physical dimension?
 BioE 1310 - Exam 1 2/20/2018 Answer Sheet - Correct answer is A for all questions 1. A particular voltage divider with 10 V across it consists of two resistors in series. One resistor is 7 KΩ and the other
BioE 1310 - Exam 1 2/20/2018 Answer Sheet - Correct answer is A for all questions 1. A particular voltage divider with 10 V across it consists of two resistors in series. One resistor is 7 KΩ and the other
Dynamics of Machines. Prof. Amitabha Ghosh. Department of Mechanical Engineering. Indian Institute of Technology, Kanpur. Module No.
 Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module No. # 07 Lecture No. # 01 In our previous lectures, you have noticed that we
Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module No. # 07 Lecture No. # 01 In our previous lectures, you have noticed that we
Linear Systems Theory
 ME 3253 Linear Systems Theory Review Class Overview and Introduction 1. How to build dynamic system model for physical system? 2. How to analyze the dynamic system? -- Time domain -- Frequency domain (Laplace
ME 3253 Linear Systems Theory Review Class Overview and Introduction 1. How to build dynamic system model for physical system? 2. How to analyze the dynamic system? -- Time domain -- Frequency domain (Laplace
CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER
 114 CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER 5.1 INTRODUCTION Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. It also refers
114 CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER 5.1 INTRODUCTION Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. It also refers
Sinusoidal Steady State Analysis (AC Analysis) Part I
 Part I") Sinusoidal Steady State Analysis (AC Analysis) Part I Amin Electronics and Electrical Communications Engineering Department (EECE) Cairo University elc.n102.eng@gmail.com http://scholar.cu.edu.eg/refky/
Sinusoidal Steady State Analysis (AC Analysis) Part I Amin Electronics and Electrical Communications Engineering Department (EECE) Cairo University elc.n102.eng@gmail.com http://scholar.cu.edu.eg/refky/
12. Introduction and Chapter Objectives
 Real Analog - Circuits 1 Chapter 1: Steady-State Sinusoidal Power 1. Introduction and Chapter Objectives In this chapter we will address the issue of power transmission via sinusoidal or AC) signals. This
Real Analog - Circuits 1 Chapter 1: Steady-State Sinusoidal Power 1. Introduction and Chapter Objectives In this chapter we will address the issue of power transmission via sinusoidal or AC) signals. This
UNIVERSITY OF BOLTON SCHOOL OF ENGINEERING BENG (HONS) IN MECHANICAL ENGINEERING SEMESTER 1EXAMINATION 2017/2018
 IN MECHANICAL ENGINEERING SEMESTER 1EXAMINATION 2017/2018") ENG00 UNIVERSITY OF BOLTON SCHOOL OF ENGINEERING BENG (HONS) IN MECHANICAL ENGINEERING SEMESTER EXAMINATION 07/08 ADVANCED THERMOFLUIDS & CONTROL SYSTEMS MODULE NO: AME6005 Date: 8 January 08 Time: 0.00.00
ENG00 UNIVERSITY OF BOLTON SCHOOL OF ENGINEERING BENG (HONS) IN MECHANICAL ENGINEERING SEMESTER EXAMINATION 07/08 ADVANCED THERMOFLUIDS & CONTROL SYSTEMS MODULE NO: AME6005 Date: 8 January 08 Time: 0.00.00
ECEN 420 LINEAR CONTROL SYSTEMS. Instructor: S. P. Bhattacharyya* (Dr. B.) 1/18
 1/18") ECEN 420 LINEAR CONTROL SYSTEMS Instructor: S. P. Bhattacharyya* (Dr. B.) 1/18 Course information Course Duration: 14 weeks Divided into 7 units, each of two weeks duration, 5 lectures, 1 test Each unit
ECEN 420 LINEAR CONTROL SYSTEMS Instructor: S. P. Bhattacharyya* (Dr. B.) 1/18 Course information Course Duration: 14 weeks Divided into 7 units, each of two weeks duration, 5 lectures, 1 test Each unit
Dynamics of Machinery
 Dynamics of Machinery Two Mark Questions & Answers Varun B Page 1 Force Analysis 1. Define inertia force. Inertia force is an imaginary force, which when acts upon a rigid body, brings it to an equilibrium
Dynamics of Machinery Two Mark Questions & Answers Varun B Page 1 Force Analysis 1. Define inertia force. Inertia force is an imaginary force, which when acts upon a rigid body, brings it to an equilibrium
Black Boxes & White Noise
 Black Boxes & White Noise The Evolution of Automatic Control K. J. Åström Lund Institute of Technology Lund, Sweden 1. Introduction 2. Early Ideas 3. A Discipline Emerges 4. The Second Wave 5. Conclusions
Black Boxes & White Noise The Evolution of Automatic Control K. J. Åström Lund Institute of Technology Lund, Sweden 1. Introduction 2. Early Ideas 3. A Discipline Emerges 4. The Second Wave 5. Conclusions
Introduction to Control (034040) lecture no. 2
 lecture no. 2") Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
Feedback. Joel Voldman* Massachusetts Institute of Technology *(with thanks to SDS)
") Feedback Joel Voldman* Massachusetts Institute of Technology *(with thanks to SDS) Cite as: Joel Voldman, course materials for 6.777J / 2.372J Design and Fabrication of Microelectromechanical Devices,
Feedback Joel Voldman* Massachusetts Institute of Technology *(with thanks to SDS) Cite as: Joel Voldman, course materials for 6.777J / 2.372J Design and Fabrication of Microelectromechanical Devices,
6. Introduction and Chapter Objectives
 Real Analog - Circuits Chapter 6: Energy Storage Elements 6. Introduction and Chapter Objectives So far, we have considered circuits that have been governed by algebraic relations. These circuits have,
Real Analog - Circuits Chapter 6: Energy Storage Elements 6. Introduction and Chapter Objectives So far, we have considered circuits that have been governed by algebraic relations. These circuits have,
Review: control, feedback, etc. Today s topic: state-space models of systems; linearization
 Plan of the Lecture Review: control, feedback, etc Today s topic: state-space models of systems; linearization Goal: a general framework that encompasses all examples of interest Once we have mastered
Plan of the Lecture Review: control, feedback, etc Today s topic: state-space models of systems; linearization Goal: a general framework that encompasses all examples of interest Once we have mastered
Comparison between the visco-elastic dampers And Magnetorheological dampers and study the Effect of temperature on the damping properties
 Comparison between the visco-elastic dampers And Magnetorheological dampers and study the Effect of temperature on the damping properties A.Q. Bhatti National University of Sciences and Technology (NUST),
Comparison between the visco-elastic dampers And Magnetorheological dampers and study the Effect of temperature on the damping properties A.Q. Bhatti National University of Sciences and Technology (NUST),
Introduction to Process Control
 Introduction to Process Control For more visit :- www.mpgirnari.in By: M. P. Girnari (SSEC, Bhavnagar) For more visit:- www.mpgirnari.in 1 Contents: Introduction Process control Dynamics Stability The
Introduction to Process Control For more visit :- www.mpgirnari.in By: M. P. Girnari (SSEC, Bhavnagar) For more visit:- www.mpgirnari.in 1 Contents: Introduction Process control Dynamics Stability The
Mechatronics Engineering. Li Wen
 Mechatronics Engineering Li Wen Bio-inspired robot-dc motor drive Unstable system Mirko Kovac,EPFL Modeling and simulation of the control system Problems 1. Why we establish mathematical model of the control
Mechatronics Engineering Li Wen Bio-inspired robot-dc motor drive Unstable system Mirko Kovac,EPFL Modeling and simulation of the control system Problems 1. Why we establish mathematical model of the control
1. Review of Circuit Theory Concepts
 1. Review of Circuit Theory Concepts Lecture notes: Section 1 ECE 65, Winter 2013, F. Najmabadi Circuit Theory is an pproximation to Maxwell s Electromagnetic Equations circuit is made of a bunch of elements
1. Review of Circuit Theory Concepts Lecture notes: Section 1 ECE 65, Winter 2013, F. Najmabadi Circuit Theory is an pproximation to Maxwell s Electromagnetic Equations circuit is made of a bunch of elements
Lecture Module 5: Introduction to Attitude Stabilization and Control
 1 Lecture Module 5: Introduction to Attitude Stabilization and Control Lectures 1-3 Stability is referred to as a system s behaviour to external/internal disturbances (small) in/from equilibrium states.
1 Lecture Module 5: Introduction to Attitude Stabilization and Control Lectures 1-3 Stability is referred to as a system s behaviour to external/internal disturbances (small) in/from equilibrium states.
Introduction to structural dynamics
 Introduction to structural dynamics p n m n u n p n-1 p 3... m n-1 m 3... u n-1 u 3 k 1 c 1 u 1 u 2 k 2 m p 1 1 c 2 m2 p 2 k n c n m n u n p n m 2 p 2 u 2 m 1 p 1 u 1 Static vs dynamic analysis Static
Introduction to structural dynamics p n m n u n p n-1 p 3... m n-1 m 3... u n-1 u 3 k 1 c 1 u 1 u 2 k 2 m p 1 1 c 2 m2 p 2 k n c n m n u n p n m 2 p 2 u 2 m 1 p 1 u 1 Static vs dynamic analysis Static
Laplace Transform in Circuit Analysis
 Laplace Transform in Circuit Analysis Laplace Transforms The Laplace transform* is a technique for analyzing linear time-invariant systems such as electrical circuits It provides an alternative functional
Laplace Transform in Circuit Analysis Laplace Transforms The Laplace transform* is a technique for analyzing linear time-invariant systems such as electrical circuits It provides an alternative functional
Coupled Drive Apparatus Modelling and Simulation
 University of Ljubljana Faculty of Electrical Engineering Victor Centellas Gil Coupled Drive Apparatus Modelling and Simulation Diploma thesis Menthor: prof. dr. Maja Atanasijević-Kunc Ljubljana, 2015
University of Ljubljana Faculty of Electrical Engineering Victor Centellas Gil Coupled Drive Apparatus Modelling and Simulation Diploma thesis Menthor: prof. dr. Maja Atanasijević-Kunc Ljubljana, 2015
NAME SID EE42/100 Spring 2013 Final Exam 1
 NAME SID EE42/100 Spring 2013 Final Exam 1 1. Short answer questions a. There are approximately 36x10 50 nucleons (protons and neutrons) in the earth. If we wanted to give each one a unique n-bit address,
NAME SID EE42/100 Spring 2013 Final Exam 1 1. Short answer questions a. There are approximately 36x10 50 nucleons (protons and neutrons) in the earth. If we wanted to give each one a unique n-bit address,
: TEACHING DIFFERENTIAL EQUATIONS WITH AN ENGINEERING FOCUS
 2006-915: TEACHING DIFFERENTIAL EQUATIONS WITH AN ENGINEERING FOCUS Stephen Pennell, University of Massachusetts-Lowell Stephen Pennell is a Professor in the Department of Mathematical Sciences at the
2006-915: TEACHING DIFFERENTIAL EQUATIONS WITH AN ENGINEERING FOCUS Stephen Pennell, University of Massachusetts-Lowell Stephen Pennell is a Professor in the Department of Mathematical Sciences at the
Energy Conservation and Poynting Theorem in Electromagnetics: A Conceptual Perspective
 Energy Conservation and Poynting Theorem in Electromagnetics: A Conceptual Perspective Krishnasamy T. Selvan Department of Electronics and Communication Engineering SSN College of Engineering, Kalavakkam,
Energy Conservation and Poynting Theorem in Electromagnetics: A Conceptual Perspective Krishnasamy T. Selvan Department of Electronics and Communication Engineering SSN College of Engineering, Kalavakkam,
Vibration Measurements Vibration Instrumentation. MCE371: Vibrations. Prof. Richter. Department of Mechanical Engineering. Handout 11 Fall 2011
 MCE371: Vibrations Prof. Richter Department of Mechanical Engineering Handout 11 Fall 2011 Overview of Vibration Measurements Follow Palm, Sect. pp 425-430 and 559-562. Additional references: Holman, J.P.,
MCE371: Vibrations Prof. Richter Department of Mechanical Engineering Handout 11 Fall 2011 Overview of Vibration Measurements Follow Palm, Sect. pp 425-430 and 559-562. Additional references: Holman, J.P.,
California Subject Examinations for Teachers
 California Subject Examinations for Teachers TEST GUIDE SCIENCE SUBTEST II: PHYSICS Subtest Description This document contains the Physics subject matter requirements arranged according to the domains
California Subject Examinations for Teachers TEST GUIDE SCIENCE SUBTEST II: PHYSICS Subtest Description This document contains the Physics subject matter requirements arranged according to the domains
ES205 Analysis and Design of Engineering Systems: Lab 1: An Introductory Tutorial: Getting Started with SIMULINK
 ES205 Analysis and Design of Engineering Systems: Lab 1: An Introductory Tutorial: Getting Started with SIMULINK What is SIMULINK? SIMULINK is a software package for modeling, simulating, and analyzing
ES205 Analysis and Design of Engineering Systems: Lab 1: An Introductory Tutorial: Getting Started with SIMULINK What is SIMULINK? SIMULINK is a software package for modeling, simulating, and analyzing
TELLEGEN S THEOREM APPLIED TO MECHANICAL, FLUID AND THERMAL SYSTEMS
 Session 2793 TELLEGEN S THEOEM APPLIED TO MECHANICAL, LUID AND THEMAL SYSTEMS avi P. amachandran and V. amachandran 2. Department of Electrical and Computer Engineering, owan University, Glassboro, New
Session 2793 TELLEGEN S THEOEM APPLIED TO MECHANICAL, LUID AND THEMAL SYSTEMS avi P. amachandran and V. amachandran 2. Department of Electrical and Computer Engineering, owan University, Glassboro, New