Pictorial Structures Revisited: People Detection and Articulated Pose Estimation. Department of Computer Science TU Darmstadt
|
|
|
- Britney Chase
- 6 years ago
- Views:
Transcription



1 Pictorial Structures Revisited: People Detection and Articulated Pose Estimation Mykhaylo Andriluka Stefan Roth Bernt Schiele Department of Computer Science TU Darmstadt
![Generic model for human detection and pose estimation Human pose estimation [Felzenszwalb&Huttenlocher, ICCV 5], [Ren et al., ICCV 5], [Sigal&Black, CVPR 6], [Zhang et al.](/docs-images/75/72440285/images/2-1.jpg ", CVPR 6], [Jiang&Marin, CVPR 8], [Ramanan, NIPS 6], [Ferrari et al., CVPR 8], [Ferrari et al.")
2 Generic model for human detection and pose estimation Human pose estimation [Felzenszwalb&Huttenlocher, ICCV 5], [Ren et al., ICCV 5], [Sigal&Black, CVPR 6], [Zhang et al., CVPR 6], [Jiang&Marin, CVPR 8], [Ramanan, NIPS 6], [Ferrari et al., CVPR 8], [Ferrari et al., CVPR 9] often rather simple appearance model focus on finding optimal assembly of parts People Detection [Viola et al., ICCV 3], [Dalal&Triggs, CVPR 5], [Leibe et al., CVPR 5], [Andriluka et al., CVPR 8] complex appearance model no pose model or limited to walking motion 2
3 Generic model for human detection and pose estimation Human pose estimation [Felzenszwalb&Huttenlocher, ICCV 5], [Ren et al., ICCV 5], [Sigal&Black, CVPR 6], [Zhang et al., CVPR 6], [Jiang&Marin, CVPR 8], [Ramanan, NIPS 6], [Ferrari et al., CVPR 8], [Ferrari et al., CVPR 9] often rather simple appearance model focus on finding optimal assembly of parts People Detection [Viola et al., ICCV 3], [Dalal&Triggs, CVPR 5], [Leibe et al., CVPR 5], [Andriluka et al., CVPR 8] complex appearance model no pose model or limited to walking motion 3
4 Can we make pictorial structures model effective for these tasks? [Fischler&Elschlager, 1973] 4
5 Can we make pictorial structures model effective for these tasks? Yes... if the model components are chosen right. 5
6 Pictorial Structures Model Body is represented as flexible configuration of body parts L L = {l, l 1,..., l N } - configuration of parts D = {d, d 1,..., d N } - part evidence posterior over body poses d i p(l D) p(d L)p(L) likelihood of observations prior on body poses 6
7 Pictorial Structures Model Pictorial structures allow exact and efficient inference. - tree-structured prior - independent part appearance model - discretized part locations - Gaussian pairwise part relationships posterior marginals sumproduct BP p(l i D) L\l i p(l D) l 9 l 5 l 6 l 8 l 1 l 7 l 2 l 3 l 1 l 4 7
8 Can we make pictorial structures model effective for these tasks? So... what are the right components? 8
9 Model Components Appearance Model: orientation 1 likelihood of part 1 Prior and Inference: estimated pose. Local Features... AdaBoost orientation K... likelihood of part N part posteriors.... 9
10 Model Components Appearance Model: orientation 1 likelihood of part 1 Prior and Inference: estimated pose. Local Features... AdaBoost orientation K... likelihood of part N part posteriors.... 1

![, PAMI 2; Mikolajczyk&Schmid, PAMI 5] dense representation discriminative](/docs-images/75/72440285/images/11-2.jpg "model: AdaBoost classifier for each body part - Shape Context: 96")

11 Likelihood Model Build on recent advances in object detection: state-of-the-art image descriptor: Shape Context [Belongie et al., PAMI 2; Mikolajczyk&Schmid, PAMI 5] dense representation discriminative model: AdaBoost classifier for each body part - Shape Context: 96 dimensions (4 angular, 3 radial, 8 gradient orientations) - Feature Vector: concatenate the descriptors inside part bounding box - head: 432 dimensions - torso: 8448 dimensions 11
12 Likelihood Model Part likelihood derived from the boosting score: decision stump weight p(d i l i ) = max part location ( decision stump output t α i,th t (x(l i )) t α i,t, ε ) small constant to deal with part occlusions 12
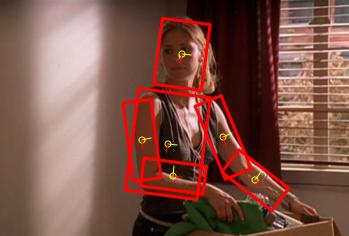
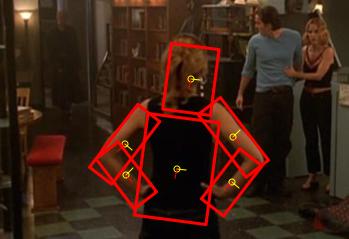
13 Likelihood Model Input image Head Torso Upper leg Our part likelihoods.... [Ramanan, NIPS 6] 13
14 Likelihood Model Input image Head Torso Upper leg Our part likelihoods.... [Ramanan, NIPS 6] 14
15 Likelihood Model Input image Head Torso Upper leg Our part likelihoods.... [Ramanan, NIPS 6] 15
16 Model Components Appearance Model: orientation 1 likelihood of part 1 Prior and Inference: estimated pose. Local Features... AdaBoost orientation K... likelihood of part N part posteriors
![Kinematic Tree Prior Represent pairwise part relations [Felzenszwalb & Huttenlocher, IJCV 5] 5 5 p(l) =p(l ) p(l i l j ), 4 3 2 1 (i,j) E p(l 2 l 1 )=N(T 12 (l 2 ) T 21 (l 1 ), Σ 12 1 ) 2 3](/docs-images/75/72440285/images/17-2.jpg "4 part locations relative to the joint 5 5 5 4 3 2 1 1 2 3 4 transformed part locations 5 5 5 l 2 l 1 1 8 5 4 5 4 l 2 4 2 2 1 2 1 6 3 3 l 1 2 4 1 2 + 1 2 6 3 3 8 4 4 1 5 1 5 5 5 1 5 5 5 5 5")
17 Kinematic Tree Prior Represent pairwise part relations [Felzenszwalb & Huttenlocher, IJCV 5] 5 5 p(l) =p(l ) p(l i l j ), (i,j) E p(l 2 l 1 )=N(T 12 (l 2 ) T 21 (l 1 ), Σ 12 1 ) part locations relative to the joint transformed part locations l 2 l l l
18 Kinematic Tree Prior Prior parameters: {T ij, Σ ij } Parameters of the prior are estimated with maximum likelihood mean pose several independent samples igure 2. (left) Kinematic prior learned on the multi-view and 18
19 Evaluation Scenarios 1. Human Pose Estimation People dataset [Ramanan, NIPS 6] 2. Upper-body Pose Estimation Buffy dataset [Ferrari et al., CVPR 8] 3. Pedestrian Detection TUD Pedestrians dataset [Andriluka et al., CVPR 8] 19
20 Evaluation Scenarios 1. Human Pose Estimation People dataset [Ramanan, NIPS 6] 2. Upper-body Pose Estimation Buffy dataset [Ferrari et al., CVPR 8] 3. Pedestrian Detection TUD Pedestrians dataset [Andriluka et al., CVPR 8] 2
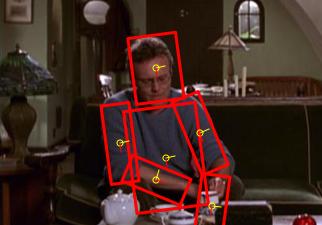
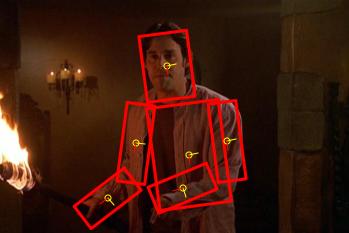
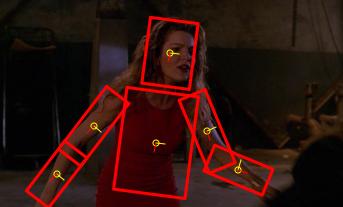
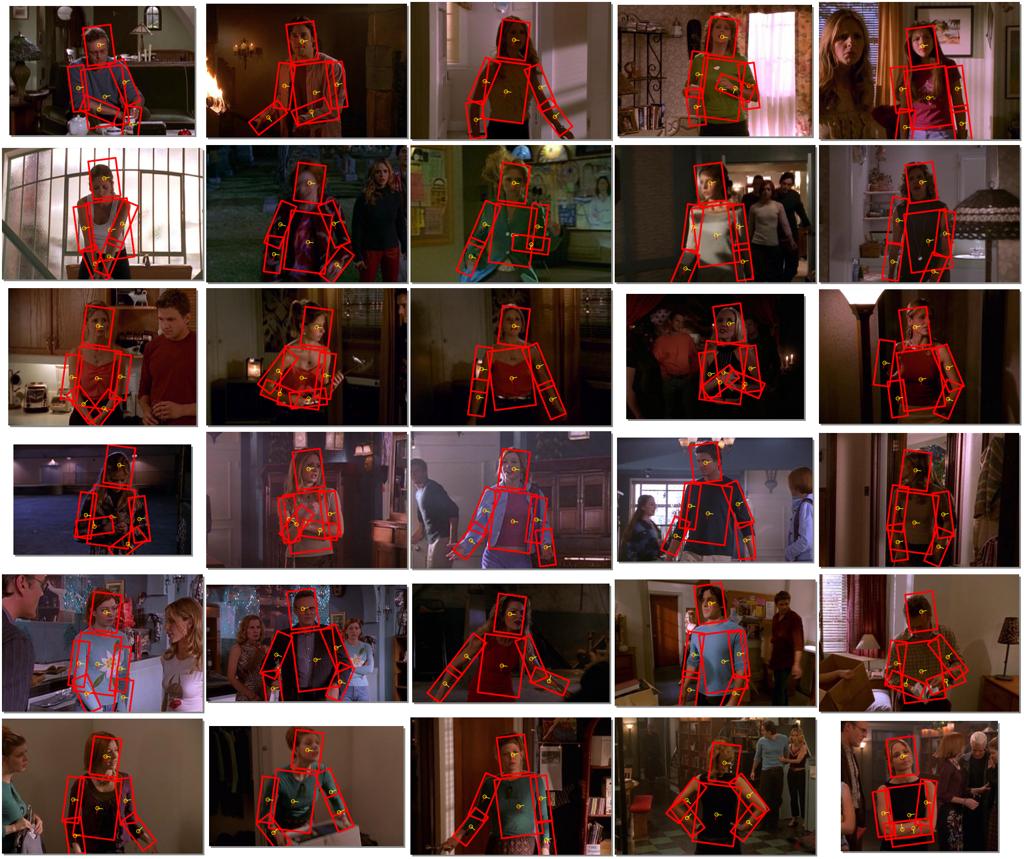
21 Scenario 1: Qualitative Results Our model (g) 8/1 (a) 8/1 (d) 7/1 [Ramanan, NIPS 6] 7/1 /1 3/1 Our model (i) 8/1 (l) 6/1 (k) 7/1 [Ramanan, NIPS 6] 4/1 3/1 The numbers on the left of 3/1 21
22 Scenario 1: Quantitative Results Method [Ramanan, NIPS 6] 2nd parse Our inference, edge features from [Ramanan, NIPS 6] Our part detectors (SC) Our prior, our part detectors (SC) Our prior, our part detectors (SIFT) Torso Upper legs Lower legs Upper arm Forearm Head Total
23 Scenario 1: Quantitative Results Method [Ramanan, NIPS 6] 2nd parse Our prior, edge features from [Ramanan, NIPS 6] Our part detectors (SC) Our prior, our part detectors (SC) Our prior, our part detectors (SIFT) Torso Upper legs Lower legs Upper arm Forearm Head Total
24 Scenario 1: Quantitative Results Method [Ramanan, NIPS 6] 2nd parse Our inference, edge features from [Ramanan, NIPS 6] Our part detectors (SC) Our prior, our part detectors (SC) Our prior, our part detectors (SIFT) Torso Upper legs Lower legs Upper arm Forearm Head Total SC = Shape Context 24
25 Scenario 1: Quantitative Results Method [Ramanan, NIPS 6] 2nd parse Our inference, edge features from [Ramanan, NIPS 6] Our part detectors (SC) Our prior, our part detectors (SC) Our prior, our part detectors (SIFT) Torso Upper legs Lower legs Upper arm Forearm Head Total SC = Shape Context 25
26 Scenario 1: Quantitative Results Method [Ramanan, NIPS 6] 2nd parse Our inference, edge features from [Ramanan, NIPS 6] Our part detectors (SC) Our prior, our part detectors (SC) Our prior, our part detectors (SIFT) Torso Upper legs Lower legs Upper arm Forearm Head Total SC = Shape Context 26
27 Evaluation Scenarios 1. Human Pose Estimation People dataset [Ramanan, NIPS 6] 2. Upper-body Pose Estimation Buffy dataset [Ferrari et al., CVPR 8] 3. Pedestrian Detection TUD Pedestrians dataset [Andriluka et al., CVPR 8] 27

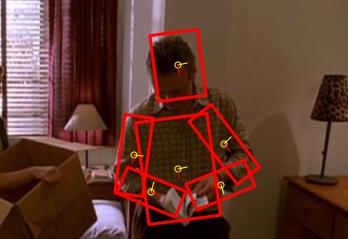
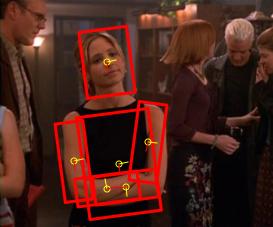
28 Estimated upper-body poses 28
29 Quantitative Results Method Torso Upper arm Lower arm Head Total [Ferrari et al. CVPR 8] detectors only full model generic model - prior and appearance learned on the People dataset
30 Quantitative Results Method Torso Upper arm Lower arm Head Total [Ferrari et al. CVPR 8] detectors only full model [Ferrari et al. CVPR 9] generic model - prior and appearance learned on the People dataset
![Quantitative Results Method Torso Upper arm Lower arm Head Total [Ferrari et al. CVPR 8] - - - - 57.9 detectors only 18.9 6.8 3.1 47.2 14.3 full model 9.7 79.3 41.2 95.9 71.](/docs-images/75/72440285/images/31-1.jpg "3 [Ferrari et al. CVPR 9] - - - - 72.2 full model, Buffy pose prior 9.7 81.35 46.5 95.5 73.")
31 Quantitative Results Method Torso Upper arm Lower arm Head Total [Ferrari et al. CVPR 8] detectors only full model [Ferrari et al. CVPR 9] full model, Buffy pose prior specialized upper body prior - appearance learned on the People dataset



32 Typical Failure Cases Foreshortening Part occlusion Detections on other body parts 32





33 Evaluation Scenarios 1. Human Pose Estimation People dataset [Ramanan, NIPS 6] 2. Upper-body Pose Estimation Buffy dataset [Ferrari et al., CVPR 8] 3. Pedestrian Detection TUD Pedestrians dataset [Andriluka et al., CVPR 8] 33

![, CVPR 8] 4 6 2 4 This work 2 2 4 2 6 4 8 6 1 8 12 1 14 5 5 5 5 1..9.](/docs-images/75/72440285/images/34-5.jpg "8 recall.7.6.5.4.")

34 People Detection: Results Comparison with state-of-the art in people detection [Andriluka et al., CVPR 8] This work recall our model, 8 parts, tree prior our model, 8 parts, tree prior our model, 8 parts, star prior our model, 8 parts, star prior partism [Andriluka etdetector al., CVPR 8] HOG (INRIA Training HOG (INRIA Training Set) Set) precision
35 Conclusion & Future Work Success of pose estimation by body part detection use well understood pose estimation framework (Pictorial Structures) use appropriate representation for kinematic dependencies use state of the art appearance representation (SIFT, SC) and classification (AdaBoost) Next steps: estimate poses in 3D part occlusions appearance constraints between parts 35
36 Thanks! Acknowledgements: Thanks to Krystian Mikolajczyk for image descriptors code Thanks to Christian Wojek for AdaBoost code and helpful suggestion Thanks to Deva Ramanan and Vittorio Ferrari for making their code and datasets publicly available This work is partially funded by German Research Foundation (DFG) through GRK Code and pre-trained models will be available at: 36
Modeling Mutual Context of Object and Human Pose in Human-Object Interaction Activities
 Modeling Mutual Context of Object and Human Pose in Human-Object Interaction Activities Bangpeng Yao and Li Fei-Fei Computer Science Department, Stanford University {bangpeng,feifeili}@cs.stanford.edu
Modeling Mutual Context of Object and Human Pose in Human-Object Interaction Activities Bangpeng Yao and Li Fei-Fei Computer Science Department, Stanford University {bangpeng,feifeili}@cs.stanford.edu
Discriminative part-based models. Many slides based on P. Felzenszwalb
 More sliding window detection: ti Discriminative part-based models Many slides based on P. Felzenszwalb Challenge: Generic object detection Pedestrian detection Features: Histograms of oriented gradients
More sliding window detection: ti Discriminative part-based models Many slides based on P. Felzenszwalb Challenge: Generic object detection Pedestrian detection Features: Histograms of oriented gradients
Graphical Object Models for Detection and Tracking
 Graphical Object Models for Detection and Tracking (ls@cs.brown.edu) Department of Computer Science Brown University Joined work with: -Ying Zhu, Siemens Corporate Research, Princeton, NJ -DorinComaniciu,
Graphical Object Models for Detection and Tracking (ls@cs.brown.edu) Department of Computer Science Brown University Joined work with: -Ying Zhu, Siemens Corporate Research, Princeton, NJ -DorinComaniciu,
The state of the art and beyond
 Feature Detectors and Descriptors The state of the art and beyond Local covariant detectors and descriptors have been successful in many applications Registration Stereo vision Motion estimation Matching
Feature Detectors and Descriptors The state of the art and beyond Local covariant detectors and descriptors have been successful in many applications Registration Stereo vision Motion estimation Matching
End-to-End Learning of Deformable Mixture of Parts and Deep Convolutional Neural Networks for Human Pose Estimation
 End-to-End Learning of Deformable Mixture of Parts and Deep Convolutional Neural Networks for Human Pose Estimation Wei Yang, Wanli Ouyang, Hongsheng Li, and Xiaogang Wang Department of Electronic Engineering,
End-to-End Learning of Deformable Mixture of Parts and Deep Convolutional Neural Networks for Human Pose Estimation Wei Yang, Wanli Ouyang, Hongsheng Li, and Xiaogang Wang Department of Electronic Engineering,
Face detection and recognition. Detection Recognition Sally
 Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
DISCRIMINATIVE DECORELATION FOR CLUSTERING AND CLASSIFICATION
 DISCRIMINATIVE DECORELATION FOR CLUSTERING AND CLASSIFICATION ECCV 12 Bharath Hariharan, Jitandra Malik, and Deva Ramanan MOTIVATION State-of-the-art Object Detection HOG Linear SVM Dalal&Triggs Histograms
DISCRIMINATIVE DECORELATION FOR CLUSTERING AND CLASSIFICATION ECCV 12 Bharath Hariharan, Jitandra Malik, and Deva Ramanan MOTIVATION State-of-the-art Object Detection HOG Linear SVM Dalal&Triggs Histograms
Detecting Humans via Their Pose
 Detecting Humans via Their Pose Alessandro Bissacco Computer Science Department University of California, Los Angeles Los Angeles, CA 90095 bissacco@cs.ucla.edu Ming-Hsuan Yang Honda Research Institute
Detecting Humans via Their Pose Alessandro Bissacco Computer Science Department University of California, Los Angeles Los Angeles, CA 90095 bissacco@cs.ucla.edu Ming-Hsuan Yang Honda Research Institute
Boosting: Algorithms and Applications
 Boosting: Algorithms and Applications Lecture 11, ENGN 4522/6520, Statistical Pattern Recognition and Its Applications in Computer Vision ANU 2 nd Semester, 2008 Chunhua Shen, NICTA/RSISE Boosting Definition
Boosting: Algorithms and Applications Lecture 11, ENGN 4522/6520, Statistical Pattern Recognition and Its Applications in Computer Vision ANU 2 nd Semester, 2008 Chunhua Shen, NICTA/RSISE Boosting Definition
CS4495/6495 Introduction to Computer Vision. 8C-L3 Support Vector Machines
 CS4495/6495 Introduction to Computer Vision 8C-L3 Support Vector Machines Discriminative classifiers Discriminative classifiers find a division (surface) in feature space that separates the classes Several
CS4495/6495 Introduction to Computer Vision 8C-L3 Support Vector Machines Discriminative classifiers Discriminative classifiers find a division (surface) in feature space that separates the classes Several
A Discriminatively Trained, Multiscale, Deformable Part Model
 A Discriminatively Trained, Multiscale, Deformable Part Model P. Felzenszwalb, D. McAllester, and D. Ramanan Edward Hsiao 16-721 Learning Based Methods in Vision February 16, 2009 Images taken from P.
A Discriminatively Trained, Multiscale, Deformable Part Model P. Felzenszwalb, D. McAllester, and D. Ramanan Edward Hsiao 16-721 Learning Based Methods in Vision February 16, 2009 Images taken from P.
Social Saliency Prediction. Hyun Soo Park and Jianbo Shi
 Social Saliency Prediction Hyun Soo Park and Jianbo Shi Nonverbal social signals 67% Hogan and Stubbs, Can t Get Through 8 Barriers to Communication, 2003. Vinciarelli et al., Social Signal Processing:
Social Saliency Prediction Hyun Soo Park and Jianbo Shi Nonverbal social signals 67% Hogan and Stubbs, Can t Get Through 8 Barriers to Communication, 2003. Vinciarelli et al., Social Signal Processing:
Fisher Vector image representation
 Fisher Vector image representation Machine Learning and Category Representation 2014-2015 Jakob Verbeek, January 9, 2015 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.14.15 A brief recap on kernel
Fisher Vector image representation Machine Learning and Category Representation 2014-2015 Jakob Verbeek, January 9, 2015 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.14.15 A brief recap on kernel
Compressed Fisher vectors for LSVR
 XRCE@ILSVRC2011 Compressed Fisher vectors for LSVR Florent Perronnin and Jorge Sánchez* Xerox Research Centre Europe (XRCE) *Now with CIII, Cordoba University, Argentina Our system in a nutshell High-dimensional
XRCE@ILSVRC2011 Compressed Fisher vectors for LSVR Florent Perronnin and Jorge Sánchez* Xerox Research Centre Europe (XRCE) *Now with CIII, Cordoba University, Argentina Our system in a nutshell High-dimensional
Object Detection Grammars
 Object Detection Grammars Pedro F. Felzenszwalb and David McAllester February 11, 2010 1 Introduction We formulate a general grammar model motivated by the problem of object detection in computer vision.
Object Detection Grammars Pedro F. Felzenszwalb and David McAllester February 11, 2010 1 Introduction We formulate a general grammar model motivated by the problem of object detection in computer vision.
Probabilistic Graphical Models & Applications
 Probabilistic Graphical Models & Applications Learning of Graphical Models Bjoern Andres and Bernt Schiele Max Planck Institute for Informatics The slides of today s lecture are authored by and shown with
Probabilistic Graphical Models & Applications Learning of Graphical Models Bjoern Andres and Bernt Schiele Max Planck Institute for Informatics The slides of today s lecture are authored by and shown with
Fantope Regularization in Metric Learning
 Fantope Regularization in Metric Learning CVPR 2014 Marc T. Law (LIP6, UPMC), Nicolas Thome (LIP6 - UPMC Sorbonne Universités), Matthieu Cord (LIP6 - UPMC Sorbonne Universités), Paris, France Introduction
Fantope Regularization in Metric Learning CVPR 2014 Marc T. Law (LIP6, UPMC), Nicolas Thome (LIP6 - UPMC Sorbonne Universités), Matthieu Cord (LIP6 - UPMC Sorbonne Universités), Paris, France Introduction
Detector Ensemble. Abstract. 1. Introduction
 Detector Ensemble Shengyang Dai Ming Yang Ying Wu Aggelos Katsaggelos EECS Department, Northwestern University, Evanston, IL 60208, U.S.A. {sda690,mya671,yingwu,aggk}@ece.northwestern.edu Abstract Component-based
Detector Ensemble Shengyang Dai Ming Yang Ying Wu Aggelos Katsaggelos EECS Department, Northwestern University, Evanston, IL 60208, U.S.A. {sda690,mya671,yingwu,aggk}@ece.northwestern.edu Abstract Component-based
Machine Learning Lecture 5
 Machine Learning Lecture 5 Linear Discriminant Functions 26.10.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course Outline Fundamentals Bayes Decision Theory
Machine Learning Lecture 5 Linear Discriminant Functions 26.10.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course Outline Fundamentals Bayes Decision Theory
Beyond Spatial Pyramids
 Beyond Spatial Pyramids Receptive Field Learning for Pooled Image Features Yangqing Jia 1 Chang Huang 2 Trevor Darrell 1 1 UC Berkeley EECS 2 NEC Labs America Goal coding pooling Bear Analysis of the pooling
Beyond Spatial Pyramids Receptive Field Learning for Pooled Image Features Yangqing Jia 1 Chang Huang 2 Trevor Darrell 1 1 UC Berkeley EECS 2 NEC Labs America Goal coding pooling Bear Analysis of the pooling
Visual Object Detection
 Visual Object Detection Ying Wu Electrical Engineering and Computer Science Northwestern University, Evanston, IL 60208 yingwu@northwestern.edu http://www.eecs.northwestern.edu/~yingwu 1 / 47 Visual Object
Visual Object Detection Ying Wu Electrical Engineering and Computer Science Northwestern University, Evanston, IL 60208 yingwu@northwestern.edu http://www.eecs.northwestern.edu/~yingwu 1 / 47 Visual Object
BugID: Rapid-Throughput Insect Population Counting Using Computer Vision
 BugID: Rapid-Throughput Insect Population Counting Using Computer Vision Students: N. Larios, H. Deng, W. Zhang, M. Sarpola, J. Yuen, S. Ruiz Correa Faculty: R. Paasch, A. Moldenke, D. A. Lytle, E. Mortensen,
BugID: Rapid-Throughput Insect Population Counting Using Computer Vision Students: N. Larios, H. Deng, W. Zhang, M. Sarpola, J. Yuen, S. Ruiz Correa Faculty: R. Paasch, A. Moldenke, D. A. Lytle, E. Mortensen,
Boosting. CAP5610: Machine Learning Instructor: Guo-Jun Qi
 Boosting CAP5610: Machine Learning Instructor: Guo-Jun Qi Weak classifiers Weak classifiers Decision stump one layer decision tree Naive Bayes A classifier without feature correlations Linear classifier
Boosting CAP5610: Machine Learning Instructor: Guo-Jun Qi Weak classifiers Weak classifiers Decision stump one layer decision tree Naive Bayes A classifier without feature correlations Linear classifier
Human Pose Tracking I: Basics. David Fleet University of Toronto
 Human Pose Tracking I: Basics David Fleet University of Toronto CIFAR Summer School, 2009 Looking at People Challenges: Complex pose / motion People have many degrees of freedom, comprising an articulated
Human Pose Tracking I: Basics David Fleet University of Toronto CIFAR Summer School, 2009 Looking at People Challenges: Complex pose / motion People have many degrees of freedom, comprising an articulated
Asaf Bar Zvi Adi Hayat. Semantic Segmentation
 Asaf Bar Zvi Adi Hayat Semantic Segmentation Today s Topics Fully Convolutional Networks (FCN) (CVPR 2015) Conditional Random Fields as Recurrent Neural Networks (ICCV 2015) Gaussian Conditional random
Asaf Bar Zvi Adi Hayat Semantic Segmentation Today s Topics Fully Convolutional Networks (FCN) (CVPR 2015) Conditional Random Fields as Recurrent Neural Networks (ICCV 2015) Gaussian Conditional random
Introduction to Discriminative Machine Learning
 Introduction to Discriminative Machine Learning Yang Wang Vision & Media Lab Simon Fraser University CRV Tutorial, Kelowna May 24, 2009 Hand-written Digit Recognition [Belongie et al. PAMI 2002] 2 Hand-written
Introduction to Discriminative Machine Learning Yang Wang Vision & Media Lab Simon Fraser University CRV Tutorial, Kelowna May 24, 2009 Hand-written Digit Recognition [Belongie et al. PAMI 2002] 2 Hand-written
Lecture 13 Visual recognition
 Lecture 13 Visual recognition Announcements Silvio Savarese Lecture 13-20-Feb-14 Lecture 13 Visual recognition Object classification bag of words models Discriminative methods Generative methods Object
Lecture 13 Visual recognition Announcements Silvio Savarese Lecture 13-20-Feb-14 Lecture 13 Visual recognition Object classification bag of words models Discriminative methods Generative methods Object
Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
Stochastic Gradient Descent
 Stochastic Gradient Descent Machine Learning CSE546 Carlos Guestrin University of Washington October 9, 2013 1 Logistic Regression Logistic function (or Sigmoid): Learn P(Y X) directly Assume a particular
Stochastic Gradient Descent Machine Learning CSE546 Carlos Guestrin University of Washington October 9, 2013 1 Logistic Regression Logistic function (or Sigmoid): Learn P(Y X) directly Assume a particular
FPGA Implementation of a HOG-based Pedestrian Recognition System
 MPC Workshop Karlsruhe 10/7/2009 FPGA Implementation of a HOG-based Pedestrian Recognition System Sebastian Bauer sebastian.bauer@fh-aschaffenburg.de Laboratory for Pattern Recognition and Computational
MPC Workshop Karlsruhe 10/7/2009 FPGA Implementation of a HOG-based Pedestrian Recognition System Sebastian Bauer sebastian.bauer@fh-aschaffenburg.de Laboratory for Pattern Recognition and Computational
Recitation 9. Gradient Boosting. Brett Bernstein. March 30, CDS at NYU. Brett Bernstein (CDS at NYU) Recitation 9 March 30, / 14
 Recitation 9 March 30, / 14") Brett Bernstein CDS at NYU March 30, 2017 Brett Bernstein (CDS at NYU) Recitation 9 March 30, 2017 1 / 14 Initial Question Intro Question Question Suppose 10 different meteorologists have produced functions
Brett Bernstein CDS at NYU March 30, 2017 Brett Bernstein (CDS at NYU) Recitation 9 March 30, 2017 1 / 14 Initial Question Intro Question Question Suppose 10 different meteorologists have produced functions
Achieving scale covariance
 Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Structured Determinantal Point Processes
 Structured Determinantal Point Processes Alex Kulesza Ben Taskar Department of Computer and Information Science University of Pennsylvania Philadelphia, PA 194 {kulesza,taskar}@cis.upenn.edu Abstract We
Structured Determinantal Point Processes Alex Kulesza Ben Taskar Department of Computer and Information Science University of Pennsylvania Philadelphia, PA 194 {kulesza,taskar}@cis.upenn.edu Abstract We
Part 4: Conditional Random Fields
 Part 4: Conditional Random Fields Sebastian Nowozin and Christoph H. Lampert Colorado Springs, 25th June 2011 1 / 39 Problem (Probabilistic Learning) Let d(y x) be the (unknown) true conditional distribution.
Part 4: Conditional Random Fields Sebastian Nowozin and Christoph H. Lampert Colorado Springs, 25th June 2011 1 / 39 Problem (Probabilistic Learning) Let d(y x) be the (unknown) true conditional distribution.
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
Composite Quantization for Approximate Nearest Neighbor Search
 Composite Quantization for Approximate Nearest Neighbor Search Jingdong Wang Lead Researcher Microsoft Research http://research.microsoft.com/~jingdw ICML 104, joint work with my interns Ting Zhang from
Composite Quantization for Approximate Nearest Neighbor Search Jingdong Wang Lead Researcher Microsoft Research http://research.microsoft.com/~jingdw ICML 104, joint work with my interns Ting Zhang from
Hidden Markov Models
 10-601 Introduction to Machine Learning Machine Learning Department School of Computer Science Carnegie Mellon University Hidden Markov Models Matt Gormley Lecture 22 April 2, 2018 1 Reminders Homework
10-601 Introduction to Machine Learning Machine Learning Department School of Computer Science Carnegie Mellon University Hidden Markov Models Matt Gormley Lecture 22 April 2, 2018 1 Reminders Homework
Fast Human Detection from Videos Using Covariance Features
 THIS PAPER APPEARED IN THE ECCV VISUAL SURVEILLANCE WORKSHOP (ECCV-VS), MARSEILLE, OCTOBER 2008 Fast Human Detection from Videos Using Covariance Features Jian Yao Jean-Marc Odobez IDIAP Research Institute
THIS PAPER APPEARED IN THE ECCV VISUAL SURVEILLANCE WORKSHOP (ECCV-VS), MARSEILLE, OCTOBER 2008 Fast Human Detection from Videos Using Covariance Features Jian Yao Jean-Marc Odobez IDIAP Research Institute
10-701/ Machine Learning - Midterm Exam, Fall 2010
 10-701/15-781 Machine Learning - Midterm Exam, Fall 2010 Aarti Singh Carnegie Mellon University 1. Personal info: Name: Andrew account: E-mail address: 2. There should be 15 numbered pages in this exam
10-701/15-781 Machine Learning - Midterm Exam, Fall 2010 Aarti Singh Carnegie Mellon University 1. Personal info: Name: Andrew account: E-mail address: 2. There should be 15 numbered pages in this exam
Accumulated Stability Voting: A Robust Descriptor from Descriptors of Multiple Scales
 Accumulated Stability Voting: A Robust Descriptor from Descriptors of Multiple Scales Tsun-Yi Yang,2 Yen-Yu Lin Yung-Yu Chuang 2 Academia Sinica, Taiwan 2 National Taiwan University, Taiwan {shamangary,yylin}@citi.sinica.edu.tw
Accumulated Stability Voting: A Robust Descriptor from Descriptors of Multiple Scales Tsun-Yi Yang,2 Yen-Yu Lin Yung-Yu Chuang 2 Academia Sinica, Taiwan 2 National Taiwan University, Taiwan {shamangary,yylin}@citi.sinica.edu.tw
Robotics 2 AdaBoost for People and Place Detection
 Robotics 2 AdaBoost for People and Place Detection Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard v.1.0, Kai Arras, Oct 09, including material by Luciano Spinello and Oscar Martinez Mozos
Robotics 2 AdaBoost for People and Place Detection Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard v.1.0, Kai Arras, Oct 09, including material by Luciano Spinello and Oscar Martinez Mozos
Learning with Structured Inputs and Outputs
 Learning with Structured Inputs and Outputs Christoph H. Lampert IST Austria (Institute of Science and Technology Austria), Vienna Microsoft Machine Learning and Intelligence School 2015 July 29-August
Learning with Structured Inputs and Outputs Christoph H. Lampert IST Austria (Institute of Science and Technology Austria), Vienna Microsoft Machine Learning and Intelligence School 2015 July 29-August
A Generative Perspective on MRFs in Low-Level Vision Supplemental Material
 A Generative Perspective on MRFs in Low-Level Vision Supplemental Material Uwe Schmidt Qi Gao Stefan Roth Department of Computer Science, TU Darmstadt 1. Derivations 1.1. Sampling the Prior We first rewrite
A Generative Perspective on MRFs in Low-Level Vision Supplemental Material Uwe Schmidt Qi Gao Stefan Roth Department of Computer Science, TU Darmstadt 1. Derivations 1.1. Sampling the Prior We first rewrite
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Oct 2009 PCA and applications Probability and classification Admin Assignment 1 grades back shortly. Assignment 2, parts 1 and 2 due October 22 at 11:00am
Introduction to Computer Vision Michael J. Black Oct 2009 PCA and applications Probability and classification Admin Assignment 1 grades back shortly. Assignment 2, parts 1 and 2 due October 22 at 11:00am
Naïve Bayes classification
 Naïve Bayes classification 1 Probability theory Random variable: a variable whose possible values are numerical outcomes of a random phenomenon. Examples: A person s height, the outcome of a coin toss
Naïve Bayes classification 1 Probability theory Random variable: a variable whose possible values are numerical outcomes of a random phenomenon. Examples: A person s height, the outcome of a coin toss
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
Grouplet: A Structured Image Representation for Recognizing Human and Object Interactions
 Grouplet: A Structured Image Representation for Recognizing Human and Object Interactions Bangpeng Yao Li Fei-Fei Computer Science Department, Stanford University, USA {bangpeng,feifeili}@cs.stanford.edu
Grouplet: A Structured Image Representation for Recognizing Human and Object Interactions Bangpeng Yao Li Fei-Fei Computer Science Department, Stanford University, USA {bangpeng,feifeili}@cs.stanford.edu
Randomized Ensemble Tracking
 2013 IEEE International Conference on Computer Vision Randomized Ensemble Tracking Qinxun Bai 1, Zheng Wu 1, Stan Sclaroff 1, Margrit Betke 1, Camille Monnier 2 1 Boston University, Boston, MA 02215, USA
2013 IEEE International Conference on Computer Vision Randomized Ensemble Tracking Qinxun Bai 1, Zheng Wu 1, Stan Sclaroff 1, Margrit Betke 1, Camille Monnier 2 1 Boston University, Boston, MA 02215, USA
INTRODUCTION HIERARCHY OF CLASSIFIERS
 INTRODUCTION DETECTION AND FOLDED HIERARCHIES FOR EFFICIENT DONALD GEMAN JOINT WORK WITH FRANCOIS FLEURET 2 / 35 INTRODUCTION DETECTION (CONT.) HIERARCHY OF CLASSIFIERS...... Advantages - Highly efficient
INTRODUCTION DETECTION AND FOLDED HIERARCHIES FOR EFFICIENT DONALD GEMAN JOINT WORK WITH FRANCOIS FLEURET 2 / 35 INTRODUCTION DETECTION (CONT.) HIERARCHY OF CLASSIFIERS...... Advantages - Highly efficient
Kai Yu NEC Laboratories America, Cupertino, California, USA
 Kai Yu NEC Laboratories America, Cupertino, California, USA Joint work with Jinjun Wang, Fengjun Lv, Wei Xu, Yihong Gong Xi Zhou, Jianchao Yang, Thomas Huang, Tong Zhang Chen Wu NEC Laboratories America
Kai Yu NEC Laboratories America, Cupertino, California, USA Joint work with Jinjun Wang, Fengjun Lv, Wei Xu, Yihong Gong Xi Zhou, Jianchao Yang, Thomas Huang, Tong Zhang Chen Wu NEC Laboratories America
CS 231A Section 1: Linear Algebra & Probability Review
 CS 231A Section 1: Linear Algebra & Probability Review 1 Topics Support Vector Machines Boosting Viola-Jones face detector Linear Algebra Review Notation Operations & Properties Matrix Calculus Probability
CS 231A Section 1: Linear Algebra & Probability Review 1 Topics Support Vector Machines Boosting Viola-Jones face detector Linear Algebra Review Notation Operations & Properties Matrix Calculus Probability
LoG Blob Finding and Scale. Scale Selection. Blobs (and scale selection) Achieving scale covariance. Blob detection in 2D. Blob detection in 2D
 Achieving scale covariance. Blob detection in 2D. Blob detection in 2D") Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
CS 231A Section 1: Linear Algebra & Probability Review. Kevin Tang
 CS 231A Section 1: Linear Algebra & Probability Review Kevin Tang Kevin Tang Section 1-1 9/30/2011 Topics Support Vector Machines Boosting Viola Jones face detector Linear Algebra Review Notation Operations
CS 231A Section 1: Linear Algebra & Probability Review Kevin Tang Kevin Tang Section 1-1 9/30/2011 Topics Support Vector Machines Boosting Viola Jones face detector Linear Algebra Review Notation Operations
Human Action Recognition under Log-Euclidean Riemannian Metric
 Human Action Recognition under Log-Euclidean Riemannian Metric Chunfeng Yuan, Weiming Hu, Xi Li, Stephen Maybank 2, Guan Luo, National Laboratory of Pattern Recognition, Institute of Automation, CAS, Beijing,
Human Action Recognition under Log-Euclidean Riemannian Metric Chunfeng Yuan, Weiming Hu, Xi Li, Stephen Maybank 2, Guan Luo, National Laboratory of Pattern Recognition, Institute of Automation, CAS, Beijing,
Modeling Data with Linear Combinations of Basis Functions. Read Chapter 3 in the text by Bishop
 Modeling Data with Linear Combinations of Basis Functions Read Chapter 3 in the text by Bishop A Type of Supervised Learning Problem We want to model data (x 1, t 1 ),..., (x N, t N ), where x i is a vector
Modeling Data with Linear Combinations of Basis Functions Read Chapter 3 in the text by Bishop A Type of Supervised Learning Problem We want to model data (x 1, t 1 ),..., (x N, t N ), where x i is a vector
38 1 Vol. 38, No ACTA AUTOMATICA SINICA January, Bag-of-phrases.. Image Representation Using Bag-of-phrases
 38 1 Vol. 38, No. 1 2012 1 ACTA AUTOMATICA SINICA January, 2012 Bag-of-phrases 1, 2 1 1 1, Bag-of-words,,, Bag-of-words, Bag-of-phrases, Bag-of-words DOI,, Bag-of-words, Bag-of-phrases, SIFT 10.3724/SP.J.1004.2012.00046
38 1 Vol. 38, No. 1 2012 1 ACTA AUTOMATICA SINICA January, 2012 Bag-of-phrases 1, 2 1 1 1, Bag-of-words,,, Bag-of-words, Bag-of-phrases, Bag-of-words DOI,, Bag-of-words, Bag-of-phrases, SIFT 10.3724/SP.J.1004.2012.00046
Clustering with k-means and Gaussian mixture distributions
 Clustering with k-means and Gaussian mixture distributions Machine Learning and Category Representation 2012-2013 Jakob Verbeek, ovember 23, 2012 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.12.13
Clustering with k-means and Gaussian mixture distributions Machine Learning and Category Representation 2012-2013 Jakob Verbeek, ovember 23, 2012 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.12.13
Machine Learning Lecture 2
 Machine Perceptual Learning and Sensory Summer Augmented 15 Computing Many slides adapted from B. Schiele Machine Learning Lecture 2 Probability Density Estimation 16.04.2015 Bastian Leibe RWTH Aachen
Machine Perceptual Learning and Sensory Summer Augmented 15 Computing Many slides adapted from B. Schiele Machine Learning Lecture 2 Probability Density Estimation 16.04.2015 Bastian Leibe RWTH Aachen
Machine learning comes from Bayesian decision theory in statistics. There we want to minimize the expected value of the loss function.
 Bayesian learning: Machine learning comes from Bayesian decision theory in statistics. There we want to minimize the expected value of the loss function. Let y be the true label and y be the predicted
Bayesian learning: Machine learning comes from Bayesian decision theory in statistics. There we want to minimize the expected value of the loss function. Let y be the true label and y be the predicted
Wavelet-based Salient Points with Scale Information for Classification
 Wavelet-based Salient Points with Scale Information for Classification Alexandra Teynor and Hans Burkhardt Department of Computer Science, Albert-Ludwigs-Universität Freiburg, Germany {teynor, Hans.Burkhardt}@informatik.uni-freiburg.de
Wavelet-based Salient Points with Scale Information for Classification Alexandra Teynor and Hans Burkhardt Department of Computer Science, Albert-Ludwigs-Universität Freiburg, Germany {teynor, Hans.Burkhardt}@informatik.uni-freiburg.de
Naïve Bayes classification. p ij 11/15/16. Probability theory. Probability theory. Probability theory. X P (X = x i )=1 i. Marginal Probability
=1 i. Marginal Probability") Probability theory Naïve Bayes classification Random variable: a variable whose possible values are numerical outcomes of a random phenomenon. s: A person s height, the outcome of a coin toss Distinguish
Probability theory Naïve Bayes classification Random variable: a variable whose possible values are numerical outcomes of a random phenomenon. s: A person s height, the outcome of a coin toss Distinguish
Introduction To Graphical Models
 Peter Gehler Introduction to Graphical Models Introduction To Graphical Models Peter V. Gehler Max Planck Institute for Intelligent Systems, Tübingen, Germany ENS/INRIA Summer School, Paris, July 2013
Peter Gehler Introduction to Graphical Models Introduction To Graphical Models Peter V. Gehler Max Planck Institute for Intelligent Systems, Tübingen, Germany ENS/INRIA Summer School, Paris, July 2013
Dynamic Data Modeling, Recognition, and Synthesis. Rui Zhao Thesis Defense Advisor: Professor Qiang Ji
 Dynamic Data Modeling, Recognition, and Synthesis Rui Zhao Thesis Defense Advisor: Professor Qiang Ji Contents Introduction Related Work Dynamic Data Modeling & Analysis Temporal localization Insufficient
Dynamic Data Modeling, Recognition, and Synthesis Rui Zhao Thesis Defense Advisor: Professor Qiang Ji Contents Introduction Related Work Dynamic Data Modeling & Analysis Temporal localization Insufficient
Lecture 3. Linear Regression II Bastian Leibe RWTH Aachen
 Advanced Machine Learning Lecture 3 Linear Regression II 02.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de This Lecture: Advanced Machine Learning Regression
Advanced Machine Learning Lecture 3 Linear Regression II 02.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de This Lecture: Advanced Machine Learning Regression
Lab 12: Structured Prediction
 December 4, 2014 Lecture plan structured perceptron application: confused messages application: dependency parsing structured SVM Class review: from modelization to classification What does learning mean?
December 4, 2014 Lecture plan structured perceptron application: confused messages application: dependency parsing structured SVM Class review: from modelization to classification What does learning mean?
Introduction to Machine Learning Midterm, Tues April 8
 Introduction to Machine Learning 10-701 Midterm, Tues April 8 [1 point] Name: Andrew ID: Instructions: You are allowed a (two-sided) sheet of notes. Exam ends at 2:45pm Take a deep breath and don t spend
Introduction to Machine Learning 10-701 Midterm, Tues April 8 [1 point] Name: Andrew ID: Instructions: You are allowed a (two-sided) sheet of notes. Exam ends at 2:45pm Take a deep breath and don t spend
Machine Learning Lecture 2
 Machine Perceptual Learning and Sensory Summer Augmented 6 Computing Announcements Machine Learning Lecture 2 Course webpage http://www.vision.rwth-aachen.de/teaching/ Slides will be made available on
Machine Perceptual Learning and Sensory Summer Augmented 6 Computing Announcements Machine Learning Lecture 2 Course webpage http://www.vision.rwth-aachen.de/teaching/ Slides will be made available on
CSE 546 Midterm Exam, Fall 2014
 CSE 546 Midterm Eam, Fall 2014 1. Personal info: Name: UW NetID: Student ID: 2. There should be 14 numbered pages in this eam (including this cover sheet). 3. You can use an material ou brought: an book,
CSE 546 Midterm Eam, Fall 2014 1. Personal info: Name: UW NetID: Student ID: 2. There should be 14 numbered pages in this eam (including this cover sheet). 3. You can use an material ou brought: an book,
Max-Margin Additive Classifiers for Detection
 Max-Margin Additive Classifiers for Detection Subhransu Maji and Alexander C. Berg Sam Hare VGG Reading Group October 30, 2009 Introduction CVPR08: SVMs with additive kernels can be evaluated efficiently.
Max-Margin Additive Classifiers for Detection Subhransu Maji and Alexander C. Berg Sam Hare VGG Reading Group October 30, 2009 Introduction CVPR08: SVMs with additive kernels can be evaluated efficiently.
Probabilistic Graphical Models
 Probabilistic Graphical Models Lecture 11 CRFs, Exponential Family CS/CNS/EE 155 Andreas Krause Announcements Homework 2 due today Project milestones due next Monday (Nov 9) About half the work should
Probabilistic Graphical Models Lecture 11 CRFs, Exponential Family CS/CNS/EE 155 Andreas Krause Announcements Homework 2 due today Project milestones due next Monday (Nov 9) About half the work should
Bayesian Support Vector Machines for Feature Ranking and Selection
 Bayesian Support Vector Machines for Feature Ranking and Selection written by Chu, Keerthi, Ong, Ghahramani Patrick Pletscher pat@student.ethz.ch ETH Zurich, Switzerland 12th January 2006 Overview 1 Introduction
Bayesian Support Vector Machines for Feature Ranking and Selection written by Chu, Keerthi, Ong, Ghahramani Patrick Pletscher pat@student.ethz.ch ETH Zurich, Switzerland 12th January 2006 Overview 1 Introduction
Variational Bayesian Logistic Regression
 Variational Bayesian Logistic Regression Sargur N. University at Buffalo, State University of New York USA Topics in Linear Models for Classification Overview 1. Discriminant Functions 2. Probabilistic
Variational Bayesian Logistic Regression Sargur N. University at Buffalo, State University of New York USA Topics in Linear Models for Classification Overview 1. Discriminant Functions 2. Probabilistic
An overview of Boosting. Yoav Freund UCSD
 An overview of Boosting Yoav Freund UCSD Plan of talk Generative vs. non-generative modeling Boosting Alternating decision trees Boosting and over-fitting Applications 2 Toy Example Computer receives telephone
An overview of Boosting Yoav Freund UCSD Plan of talk Generative vs. non-generative modeling Boosting Alternating decision trees Boosting and over-fitting Applications 2 Toy Example Computer receives telephone
Representing Images Detecting faces in images
 11-755 Machine Learning for Signal Processing Representing Images Detecting faces in images Class 5. 15 Sep 2009 Instructor: Bhiksha Raj Last Class: Representing Audio n Basic DFT n Computing a Spectrogram
11-755 Machine Learning for Signal Processing Representing Images Detecting faces in images Class 5. 15 Sep 2009 Instructor: Bhiksha Raj Last Class: Representing Audio n Basic DFT n Computing a Spectrogram
Lecture 12. Neural Networks Bastian Leibe RWTH Aachen
 Advanced Machine Learning Lecture 12 Neural Networks 10.12.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de This Lecture: Advanced Machine Learning Regression
Advanced Machine Learning Lecture 12 Neural Networks 10.12.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de This Lecture: Advanced Machine Learning Regression
Discriminative Learning and Big Data
 AIMS-CDT Michaelmas 2016 Discriminative Learning and Big Data Lecture 2: Other loss functions and ANN Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Lecture
AIMS-CDT Michaelmas 2016 Discriminative Learning and Big Data Lecture 2: Other loss functions and ANN Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Lecture
Machine Learning 4. week
 Machine Learning 4. week robability and Conditional robability ayes Theorem Naïve ayes Classifier Umut ORHN, hd. robability The term shows the occurring likelihood of each situation in a random process
Machine Learning 4. week robability and Conditional robability ayes Theorem Naïve ayes Classifier Umut ORHN, hd. robability The term shows the occurring likelihood of each situation in a random process
Shape Outlier Detection Using Pose Preserving Dynamic Shape Models
 Shape Outlier Detection Using Pose Preserving Dynamic Shape Models Chan-Su Lee and Ahmed Elgammal Rutgers, The State University of New Jersey Department of Computer Science Outline Introduction Shape Outlier
Shape Outlier Detection Using Pose Preserving Dynamic Shape Models Chan-Su Lee and Ahmed Elgammal Rutgers, The State University of New Jersey Department of Computer Science Outline Introduction Shape Outlier
Kernel Density Topic Models: Visual Topics Without Visual Words
 Kernel Density Topic Models: Visual Topics Without Visual Words Konstantinos Rematas K.U. Leuven ESAT-iMinds krematas@esat.kuleuven.be Mario Fritz Max Planck Institute for Informatics mfrtiz@mpi-inf.mpg.de
Kernel Density Topic Models: Visual Topics Without Visual Words Konstantinos Rematas K.U. Leuven ESAT-iMinds krematas@esat.kuleuven.be Mario Fritz Max Planck Institute for Informatics mfrtiz@mpi-inf.mpg.de
STA414/2104. Lecture 11: Gaussian Processes. Department of Statistics
 STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
DEPARTMENT OF COMPUTER SCIENCE Autumn Semester MACHINE LEARNING AND ADAPTIVE INTELLIGENCE
 Data Provided: None DEPARTMENT OF COMPUTER SCIENCE Autumn Semester 203 204 MACHINE LEARNING AND ADAPTIVE INTELLIGENCE 2 hours Answer THREE of the four questions. All questions carry equal weight. Figures
Data Provided: None DEPARTMENT OF COMPUTER SCIENCE Autumn Semester 203 204 MACHINE LEARNING AND ADAPTIVE INTELLIGENCE 2 hours Answer THREE of the four questions. All questions carry equal weight. Figures
Ensemble Methods. NLP ML Web! Fall 2013! Andrew Rosenberg! TA/Grader: David Guy Brizan
 Ensemble Methods NLP ML Web! Fall 2013! Andrew Rosenberg! TA/Grader: David Guy Brizan How do you make a decision? What do you want for lunch today?! What did you have last night?! What are your favorite
Ensemble Methods NLP ML Web! Fall 2013! Andrew Rosenberg! TA/Grader: David Guy Brizan How do you make a decision? What do you want for lunch today?! What did you have last night?! What are your favorite
Non-Bayesian Classifiers Part II: Linear Discriminants and Support Vector Machines
 Non-Bayesian Classifiers Part II: Linear Discriminants and Support Vector Machines Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Fall 2018 CS 551, Fall
Non-Bayesian Classifiers Part II: Linear Discriminants and Support Vector Machines Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Fall 2018 CS 551, Fall
CPSC 340: Machine Learning and Data Mining. MLE and MAP Fall 2017
 CPSC 340: Machine Learning and Data Mining MLE and MAP Fall 2017 Assignment 3: Admin 1 late day to hand in tonight, 2 late days for Wednesday. Assignment 4: Due Friday of next week. Last Time: Multi-Class
CPSC 340: Machine Learning and Data Mining MLE and MAP Fall 2017 Assignment 3: Admin 1 late day to hand in tonight, 2 late days for Wednesday. Assignment 4: Due Friday of next week. Last Time: Multi-Class
COMPUTER vision and machine intelligence have been
 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 23, NO. 1, JANUARY 2014 287 Human Detection by Quadratic Classification on Subspace of Extended Histogram of Gradients Amit Satpathy, Student Member, IEEE, Xudong
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 23, NO. 1, JANUARY 2014 287 Human Detection by Quadratic Classification on Subspace of Extended Histogram of Gradients Amit Satpathy, Student Member, IEEE, Xudong
2D Image Processing Face Detection and Recognition
 2D Image Processing Face Detection and Recognition Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Face Detection and Recognition Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Introduction. Chapter 1
 Chapter 1 Introduction In this book we will be concerned with supervised learning, which is the problem of learning input-output mappings from empirical data (the training dataset). Depending on the characteristics
Chapter 1 Introduction In this book we will be concerned with supervised learning, which is the problem of learning input-output mappings from empirical data (the training dataset). Depending on the characteristics
Final Exam, Machine Learning, Spring 2009
 Name: Andrew ID: Final Exam, 10701 Machine Learning, Spring 2009 - The exam is open-book, open-notes, no electronics other than calculators. - The maximum possible score on this exam is 100. You have 3
Name: Andrew ID: Final Exam, 10701 Machine Learning, Spring 2009 - The exam is open-book, open-notes, no electronics other than calculators. - The maximum possible score on this exam is 100. You have 3
Hidden Markov Models
 10-601 Introduction to Machine Learning Machine Learning Department School of Computer Science Carnegie Mellon University Hidden Markov Models Matt Gormley Lecture 19 Nov. 5, 2018 1 Reminders Homework
10-601 Introduction to Machine Learning Machine Learning Department School of Computer Science Carnegie Mellon University Hidden Markov Models Matt Gormley Lecture 19 Nov. 5, 2018 1 Reminders Homework
Natural Language Processing. Classification. Features. Some Definitions. Classification. Feature Vectors. Classification I. Dan Klein UC Berkeley
 Natural Language Processing Classification Classification I Dan Klein UC Berkeley Classification Automatically make a decision about inputs Example: document category Example: image of digit digit Example:
Natural Language Processing Classification Classification I Dan Klein UC Berkeley Classification Automatically make a decision about inputs Example: document category Example: image of digit digit Example:
Multiclass Classification-1
 CS 446 Machine Learning Fall 2016 Oct 27, 2016 Multiclass Classification Professor: Dan Roth Scribe: C. Cheng Overview Binary to multiclass Multiclass SVM Constraint classification 1 Introduction Multiclass
CS 446 Machine Learning Fall 2016 Oct 27, 2016 Multiclass Classification Professor: Dan Roth Scribe: C. Cheng Overview Binary to multiclass Multiclass SVM Constraint classification 1 Introduction Multiclass
Final Overview. Introduction to ML. Marek Petrik 4/25/2017
 Final Overview Introduction to ML Marek Petrik 4/25/2017 This Course: Introduction to Machine Learning Build a foundation for practice and research in ML Basic machine learning concepts: max likelihood,
Final Overview Introduction to ML Marek Petrik 4/25/2017 This Course: Introduction to Machine Learning Build a foundation for practice and research in ML Basic machine learning concepts: max likelihood,
VBM683 Machine Learning
 VBM683 Machine Learning Pinar Duygulu Slides are adapted from Dhruv Batra Bias is the algorithm's tendency to consistently learn the wrong thing by not taking into account all the information in the data
VBM683 Machine Learning Pinar Duygulu Slides are adapted from Dhruv Batra Bias is the algorithm's tendency to consistently learn the wrong thing by not taking into account all the information in the data
Loss Functions and Optimization. Lecture 3-1
 Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative Assignment 1 is released: http://cs231n.github.io/assignments2017/assignment1/ Due Thursday April 20, 11:59pm on Canvas (Extending
Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative Assignment 1 is released: http://cs231n.github.io/assignments2017/assignment1/ Due Thursday April 20, 11:59pm on Canvas (Extending
ECE 5424: Introduction to Machine Learning
 ECE 5424: Introduction to Machine Learning Topics: Ensemble Methods: Bagging, Boosting PAC Learning Readings: Murphy 16.4;; Hastie 16 Stefan Lee Virginia Tech Fighting the bias-variance tradeoff Simple
ECE 5424: Introduction to Machine Learning Topics: Ensemble Methods: Bagging, Boosting PAC Learning Readings: Murphy 16.4;; Hastie 16 Stefan Lee Virginia Tech Fighting the bias-variance tradeoff Simple
CS340 Winter 2010: HW3 Out Wed. 2nd February, due Friday 11th February
 CS340 Winter 2010: HW3 Out Wed. 2nd February, due Friday 11th February 1 PageRank You are given in the file adjency.mat a matrix G of size n n where n = 1000 such that { 1 if outbound link from i to j,
CS340 Winter 2010: HW3 Out Wed. 2nd February, due Friday 11th February 1 PageRank You are given in the file adjency.mat a matrix G of size n n where n = 1000 such that { 1 if outbound link from i to j,
Lecture 9: PGM Learning
 13 Oct 2014 Intro. to Stats. Machine Learning COMP SCI 4401/7401 Table of Contents I Learning parameters in MRFs 1 Learning parameters in MRFs Inference and Learning Given parameters (of potentials) and
13 Oct 2014 Intro. to Stats. Machine Learning COMP SCI 4401/7401 Table of Contents I Learning parameters in MRFs 1 Learning parameters in MRFs Inference and Learning Given parameters (of potentials) and
CMU-Q Lecture 24:
 CMU-Q 15-381 Lecture 24: Supervised Learning 2 Teacher: Gianni A. Di Caro SUPERVISED LEARNING Hypotheses space Hypothesis function Labeled Given Errors Performance criteria Given a collection of input
CMU-Q 15-381 Lecture 24: Supervised Learning 2 Teacher: Gianni A. Di Caro SUPERVISED LEARNING Hypotheses space Hypothesis function Labeled Given Errors Performance criteria Given a collection of input