Robust Control 9 Design Summary & Examples
|
|
|
- Amberlynn Hampton
- 5 years ago
- Views:
Transcription
1 Robust Control 9 Design Summary & Examples Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University 5/6/003
2 Outline he H Problem Solution via γ-iteration Robust stability via coprime factorization Robust stability with loop shaping Example: non-collocated revisited
3 he H Problem We will formulate a problem similar to above, but with two changes: 1) the disturbances are not stochastic. wt may be any member of the class () wt = 1 ) Choose K so that the maximum of z t over all admissible disturbances () wt is a minimum, i.e. min max zt ( ) K w = 1 () ()
4 he H Problem, Cont d Recall: 1 z () t z() t dt = Z ( jω) Z( jω) dω π 1 = W ( jω) F ( jω) F( jω) W( jω) dω π he maximum performance energy over all disturbances with unit norm occurs when W is alligned with the maximum eigenvalue max ( ) ( ) ( ) ( ) ( ) w = 1 = 1 z t z t dt W jωσ ( F jω ) W jωdω π ( ω ) = max σ F( j ) = F min F ω K * of F F :
5 Solution of the H Problem A stabilizing controller that satisfies Fs ( ) < γ is A ZL K = F 0 where ( ) A = A+ B + L D W + B F + Z L C + Z L D F uu ( uu ) 1 ( xy ) yy F = R R + B X L = Y C + V V 1 1 W = B 1 X, Z = I Y X γ γ X 0, Y 0 satisfy the Riccati equations 1 X A + A X X B R B BB X = R + R R R γ 1 1 r r uu 1 1 xx xu uu xu 1 AY + Y A Y C V C C C Y = V + V V V γ 1 1 e e yy 1 1 xx xy yy xy If γ is fixed, these Riccati equations are decoupled
6 Solution of the H Problem, Cont d And the following 3 conditions are satisfied 1) he Hamiltonial matrix A BRuu Rxu BRuu B + BB 1 1 γ 1 1 Rxx RxuRuu Rxu ( A BRuu Rxu ) + has no eigenvalues on the imaginary axis. Equivalently, A + BW + B F 1 is stable. ) he Hamiltonian matrix ( A VxyVyy C) CVyy C + C 1C1 γ 1 1 Vxx + VxyVyy Vxy A+ VxyVyy C has no eigenvalues on the imaginary axis. Equivalently, 1 A+ LC + Y C C γ 1 1 is stable. () () ρ YX < γ ρ = λ 3) ( ) where max i i is the spectral radius.
7 Strategy for Solving H ypically there is a minimum value of γ for which the above conditions are satisfied. his is the optimal control. he usual method is to find the optimal control by γ-iteration. Begin with a large γ and reduce it until one of the conditions fail. hen use a bisection method, until within an acceptable tolerance. Usually, we don t need to get that close - a few iterations will suffice.
8 Robust Controller Design with Coprime Uncertainty Consider the family of perturbed plants { 1 ( ) ( ) [ ] ε} G = D + N + < p D N N D with some stability margin ε > 0. he system is robustly stabilized by the controller u = Ky if and only if γ K ( I GK ) D I ε Robust Stabilizer Design Problem: Find the lowest achievable γ and the corresponding maximum stability margin ε and the corresponding controller K.
9 Solution to RSDP min 1 max ( 1 ( XZ )) 1/ where X, Z are the unique positive definite sol'ns of the ARE's ( ) ( ) A BS D C Z + Z A BS D C ZC R CZ + BS B = ( ) ( ) A BS D C X + X A BS D C XBS B X + C R C = and γ = ε = + ρ ( ) minimal realization ( A, B, C, D) G s R= I + DD, S = I + D D 0 0
10 Solution to RSDP, Cont d a solution that guarantees K 1 1 ( I GK ) D γ for some γ > γ I is given by K A + BF + γ ( L ) ZC ( C+ DF) γ ( L ) ZC ( 1 γ ) ( ) 1 F S D C B X min 1 1 = B X D = + L= I + XZ
11 Loop Shaping for Performance: Closed Loop ransfer Functions Assume the closed loop is stable. hen: σ ( S ) << σ ( ) σ ( ) σ ( ) ( KS ) 1. disturbance rejection 1. noise attenuation << 1 3. reference tracking 1 4. control energy σ << 1 ( KS ) σ ( ) 5. robust stability with additive uncertainty σ << 1 6. robust stability with mult output uncertainty << 1
12 Loop Shaping for Performance: Open Loop ransfer Function Assume the closed loop is stable. hen: σ ( L) σ ( L) σ ( L) ( K ) 1. disturbance rejection >> 1. noise attenuation << 1 3. reference tracking >> 1 4. control energy σ << 1 ( K ) 5. robust stability with additive uncertainty σ << 1, if σ ( L) << 1 ( L) 6. robust stability with mult output uncertainty σ << 1
13 Example: Collocated vs Noncollocated he goal is to position the load. A position sensor can be placed on motor or load. θ1 θ L motor load flexible shaft
14 Example: d dt θ θ1 0 0 ω k/ J c / J k/ J 0 ω 0 1/ J = L θ θ 0 0 ω k/ J 0 k/ J c / Jω 1/ J 0 z = [ θ1 θ1 ω 1 ω 1 0 ] or z = [ ] θ θ ω ω y = z J = J = 1, k = 1, c = c = 0 1 1
15 Example P = or P= Non-collocated Collocated
 ( s 0.543 s 1.")
 ( s + 0.916) 3.")
16 Simplified Collocated G c ( s) = ( s 0.916) ( s s 1.969) ( s ) ( s+.49) ( s s ) ( s ) 3.65 ( s +.49) + + +
17 Simplified Noncollocated G c ( s) = + + s s s s ( s 0.44) ( s s.089) ( ) ( + ) ( ) + + s s s ( s 0.44) ( s ) ( + ) ( )
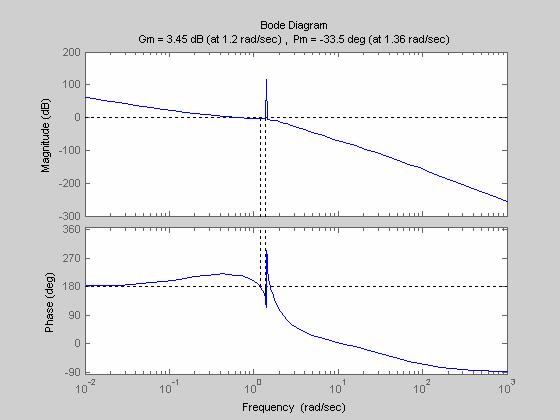
18 Noncollocated
19 Robust Stability gammin = 3.80 Zero/pole/gain: (s+0.363) (s^ s +.00) (s+3.15) (s+.35) (s^ s ) gammin = Zero/pole/gain: (s+.001) (s ) (s^ s ) (s ) (s^ s +.744) (s^ s +.733)
20 Step Responses Red: Shaped robust stability Blue: γ-iteration Green: Robust stability
21 Robust Stability
22 Shaped Robust Stability
Chapter 3. LQ, LQG and Control System Design. Dutch Institute of Systems and Control
 Chapter 3 LQ, LQG and Control System H 2 Design Overview LQ optimization state feedback LQG optimization output feedback H 2 optimization non-stochastic version of LQG Application to feedback system design
Chapter 3 LQ, LQG and Control System H 2 Design Overview LQ optimization state feedback LQG optimization output feedback H 2 optimization non-stochastic version of LQG Application to feedback system design
A Comparative Study on Automatic Flight Control for small UAV
 Proceedings of the 5 th International Conference of Control, Dynamic Systems, and Robotics (CDSR'18) Niagara Falls, Canada June 7 9, 18 Paper No. 13 DOI: 1.11159/cdsr18.13 A Comparative Study on Automatic
Proceedings of the 5 th International Conference of Control, Dynamic Systems, and Robotics (CDSR'18) Niagara Falls, Canada June 7 9, 18 Paper No. 13 DOI: 1.11159/cdsr18.13 A Comparative Study on Automatic
Robust Control 3 The Closed Loop
 Robust Control 3 The Closed Loop Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University /2/2002 Outline Closed Loop Transfer Functions Traditional Performance Measures Time
Robust Control 3 The Closed Loop Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University /2/2002 Outline Closed Loop Transfer Functions Traditional Performance Measures Time
Robust Control 5 Nominal Controller Design Continued
 Robust Control 5 Nominal Controller Design Continued Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University 4/14/2003 Outline he LQR Problem A Generalization to LQR Min-Max
Robust Control 5 Nominal Controller Design Continued Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University 4/14/2003 Outline he LQR Problem A Generalization to LQR Min-Max
MEM 355 Performance Enhancement of Dynamical Systems
 MEM 355 Performance Enhancement of Dynamical Systems Frequency Domain Design Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University 5/8/25 Outline Closed Loop Transfer Functions
MEM 355 Performance Enhancement of Dynamical Systems Frequency Domain Design Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University 5/8/25 Outline Closed Loop Transfer Functions
OPTIMAL CONTROL SYSTEMS
 SYSTEMS MIN-MAX Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University OUTLINE MIN-MAX CONTROL Problem Definition HJB Equation Example GAME THEORY Differential Games Isaacs
SYSTEMS MIN-MAX Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University OUTLINE MIN-MAX CONTROL Problem Definition HJB Equation Example GAME THEORY Differential Games Isaacs
MTNS 06, Kyoto (July, 2006) Shinji Hara The University of Tokyo, Japan
 Shinji Hara The University of Tokyo, Japan") MTNS 06, Kyoto (July, 2006) Shinji Hara The University of Tokyo, Japan Outline Motivation & Background: H2 Tracking Performance Limits: new paradigm Explicit analytical solutions with examples H2 Regulation
MTNS 06, Kyoto (July, 2006) Shinji Hara The University of Tokyo, Japan Outline Motivation & Background: H2 Tracking Performance Limits: new paradigm Explicit analytical solutions with examples H2 Regulation
Intro to Frequency Domain Design
 Intro to Frequency Domain Design MEM 355 Performance Enhancement of Dynamical Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline Closed Loop Transfer Functions
Intro to Frequency Domain Design MEM 355 Performance Enhancement of Dynamical Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline Closed Loop Transfer Functions
6.241 Dynamic Systems and Control
 6.241 Dynamic Systems and Control Lecture 24: H2 Synthesis Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology May 4, 2011 E. Frazzoli (MIT) Lecture 24: H 2 Synthesis May
6.241 Dynamic Systems and Control Lecture 24: H2 Synthesis Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology May 4, 2011 E. Frazzoli (MIT) Lecture 24: H 2 Synthesis May
State Space Design. MEM 355 Performance Enhancement of Dynamical Systems
 State Space Design MEM 355 Performance Enhancement of Dynamical Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline State space techniques emerged around
State Space Design MEM 355 Performance Enhancement of Dynamical Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline State space techniques emerged around
Root Locus Design. MEM 355 Performance Enhancement of Dynamical Systems
 Root Locus Design MEM 355 Performance Enhancement of Dynamical Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline The root locus design method is an iterative,
Root Locus Design MEM 355 Performance Enhancement of Dynamical Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline The root locus design method is an iterative,
[k,g,gfin] = hinfsyn(p,nmeas,ncon,gmin,gmax,tol)
![[k,g,gfin] = hinfsyn(p,nmeas,ncon,gmin,gmax,tol)](/thumbs/96/127783005.jpg "[k,g,gfin] = hinfsyn(p,nmeas,ncon,gmin,gmax,tol)") 8 H Controller Synthesis: hinfsyn The command syntax is k,g,gfin = hinfsyn(p,nmeas,ncon,gmin,gmax,tol) associated with the general feedback diagram below. e y P d u e G = F L (P, K) d K hinfsyn calculates
8 H Controller Synthesis: hinfsyn The command syntax is k,g,gfin = hinfsyn(p,nmeas,ncon,gmin,gmax,tol) associated with the general feedback diagram below. e y P d u e G = F L (P, K) d K hinfsyn calculates
Singular Value Decomposition of the frequency response operator
 Measures of input-output amplification (across frequency) Largest singular value Hilbert-Schmidt norm (power spectral density) Systems with one spatial variable Two point boundary value problems EE 8235:
Measures of input-output amplification (across frequency) Largest singular value Hilbert-Schmidt norm (power spectral density) Systems with one spatial variable Two point boundary value problems EE 8235:
Topic # Feedback Control Systems
 Topic #20 16.31 Feedback Control Systems Closed-loop system analysis Bounded Gain Theorem Robust Stability Fall 2007 16.31 20 1 SISO Performance Objectives Basic setup: d i d o r u y G c (s) G(s) n control
Topic #20 16.31 Feedback Control Systems Closed-loop system analysis Bounded Gain Theorem Robust Stability Fall 2007 16.31 20 1 SISO Performance Objectives Basic setup: d i d o r u y G c (s) G(s) n control
Mapping MIMO control system specifications into parameter space
 Mapping MIMO control system specifications into parameter space Michael Muhler 1 Abstract This paper considers the mapping of design objectives for parametric multi-input multi-output systems into parameter
Mapping MIMO control system specifications into parameter space Michael Muhler 1 Abstract This paper considers the mapping of design objectives for parametric multi-input multi-output systems into parameter
Denis ARZELIER arzelier
 COURSE ON LMI OPTIMIZATION WITH APPLICATIONS IN CONTROL PART II.2 LMIs IN SYSTEMS CONTROL STATE-SPACE METHODS PERFORMANCE ANALYSIS and SYNTHESIS Denis ARZELIER www.laas.fr/ arzelier arzelier@laas.fr 15
COURSE ON LMI OPTIMIZATION WITH APPLICATIONS IN CONTROL PART II.2 LMIs IN SYSTEMS CONTROL STATE-SPACE METHODS PERFORMANCE ANALYSIS and SYNTHESIS Denis ARZELIER www.laas.fr/ arzelier arzelier@laas.fr 15
Chapter Robust Performance and Introduction to the Structured Singular Value Function Introduction As discussed in Lecture 0, a process is better desc
 Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter Robust
Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter Robust
Control Systems Design
 ELEC4410 Control Systems Design Lecture 18: State Feedback Tracking and State Estimation Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science Lecture 18:
ELEC4410 Control Systems Design Lecture 18: State Feedback Tracking and State Estimation Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science Lecture 18:
Lecture 9: Input Disturbance A Design Example Dr.-Ing. Sudchai Boonto
 Dr-Ing Sudchai Boonto Department of Control System and Instrumentation Engineering King Mongkuts Unniversity of Technology Thonburi Thailand d u g r e u K G y The sensitivity S is the transfer function
Dr-Ing Sudchai Boonto Department of Control System and Instrumentation Engineering King Mongkuts Unniversity of Technology Thonburi Thailand d u g r e u K G y The sensitivity S is the transfer function
Lecture 13: Internal Model Principle and Repetitive Control
 ME 233, UC Berkeley, Spring 2014 Xu Chen Lecture 13: Internal Model Principle and Repetitive Control Big picture review of integral control in PID design example: 0 Es) C s) Ds) + + P s) Y s) where P s)
ME 233, UC Berkeley, Spring 2014 Xu Chen Lecture 13: Internal Model Principle and Repetitive Control Big picture review of integral control in PID design example: 0 Es) C s) Ds) + + P s) Y s) where P s)
FEL3210 Multivariable Feedback Control
 FEL3210 Multivariable Feedback Control Lecture 5: Uncertainty and Robustness in SISO Systems [Ch.7-(8)] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 5:Uncertainty and Robustness () FEL3210 MIMO
FEL3210 Multivariable Feedback Control Lecture 5: Uncertainty and Robustness in SISO Systems [Ch.7-(8)] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 5:Uncertainty and Robustness () FEL3210 MIMO
H 2 Optimal State Feedback Control Synthesis. Raktim Bhattacharya Aerospace Engineering, Texas A&M University
 H 2 Optimal State Feedback Control Synthesis Raktim Bhattacharya Aerospace Engineering, Texas A&M University Motivation Motivation w(t) u(t) G K y(t) z(t) w(t) are exogenous signals reference, process
H 2 Optimal State Feedback Control Synthesis Raktim Bhattacharya Aerospace Engineering, Texas A&M University Motivation Motivation w(t) u(t) G K y(t) z(t) w(t) are exogenous signals reference, process
ECSE 4962 Control Systems Design. A Brief Tutorial on Control Design
 ECSE 4962 Control Systems Design A Brief Tutorial on Control Design Instructor: Professor John T. Wen TA: Ben Potsaid http://www.cat.rpi.edu/~wen/ecse4962s04/ Don t Wait Until The Last Minute! You got
ECSE 4962 Control Systems Design A Brief Tutorial on Control Design Instructor: Professor John T. Wen TA: Ben Potsaid http://www.cat.rpi.edu/~wen/ecse4962s04/ Don t Wait Until The Last Minute! You got
Problem Set 5 Solutions 1
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.245: MULTIVARIABLE CONTROL SYSTEMS by A. Megretski Problem Set 5 Solutions The problem set deals with Hankel
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.245: MULTIVARIABLE CONTROL SYSTEMS by A. Megretski Problem Set 5 Solutions The problem set deals with Hankel
Uncertainty and Robustness for SISO Systems
 Uncertainty and Robustness for SISO Systems ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Outline Nature of uncertainty (models and signals). Physical sources of model uncertainty. Mathematical
Uncertainty and Robustness for SISO Systems ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Outline Nature of uncertainty (models and signals). Physical sources of model uncertainty. Mathematical
Lecture 8. Applications
 Lecture 8. Applications Ivan Papusha CDS270 2: Mathematical Methods in Control and System Engineering May 8, 205 / 3 Logistics hw7 due this Wed, May 20 do an easy problem or CYOA hw8 (design problem) will
Lecture 8. Applications Ivan Papusha CDS270 2: Mathematical Methods in Control and System Engineering May 8, 205 / 3 Logistics hw7 due this Wed, May 20 do an easy problem or CYOA hw8 (design problem) will
Lecture 6. Chapter 8: Robust Stability and Performance Analysis for MIMO Systems. Eugenio Schuster.
 Lecture 6 Chapter 8: Robust Stability and Performance Analysis for MIMO Systems Eugenio Schuster schuster@lehigh.edu Mechanical Engineering and Mechanics Lehigh University Lecture 6 p. 1/73 6.1 General
Lecture 6 Chapter 8: Robust Stability and Performance Analysis for MIMO Systems Eugenio Schuster schuster@lehigh.edu Mechanical Engineering and Mechanics Lehigh University Lecture 6 p. 1/73 6.1 General
Problem Set 4 Solution 1
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.245: MULTIVARIABLE CONTROL SYSTEMS by A. Megretski Problem Set 4 Solution Problem 4. For the SISO feedback
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.245: MULTIVARIABLE CONTROL SYSTEMS by A. Megretski Problem Set 4 Solution Problem 4. For the SISO feedback
A DARK GREY P O N T, with a Switch Tail, and a small Star on the Forehead. Any
 Y Y Y X X «/ YY Y Y ««Y x ) & \ & & } # Y \#$& / Y Y X» \\ / X X X x & Y Y X «q «z \x» = q Y # % \ & [ & Z \ & { + % ) / / «q zy» / & / / / & x x X / % % ) Y x X Y $ Z % Y Y x x } / % «] «] # z» & Y X»
Y Y Y X X «/ YY Y Y ««Y x ) & \ & & } # Y \#$& / Y Y X» \\ / X X X x & Y Y X «q «z \x» = q Y # % \ & [ & Z \ & { + % ) / / «q zy» / & / / / & x x X / % % ) Y x X Y $ Z % Y Y x x } / % «] «] # z» & Y X»
Stochastic Processes. M. Sami Fadali Professor of Electrical Engineering University of Nevada, Reno
 Stochastic Processes M. Sami Fadali Professor of Electrical Engineering University of Nevada, Reno 1 Outline Stochastic (random) processes. Autocorrelation. Crosscorrelation. Spectral density function.
Stochastic Processes M. Sami Fadali Professor of Electrical Engineering University of Nevada, Reno 1 Outline Stochastic (random) processes. Autocorrelation. Crosscorrelation. Spectral density function.
Introduction. Performance and Robustness (Chapter 1) Advanced Control Systems Spring / 31
 Advanced Control Systems Spring / 31") Introduction Classical Control Robust Control u(t) y(t) G u(t) G + y(t) G : nominal model G = G + : plant uncertainty Uncertainty sources : Structured : parametric uncertainty, multimodel uncertainty Unstructured
Introduction Classical Control Robust Control u(t) y(t) G u(t) G + y(t) G : nominal model G = G + : plant uncertainty Uncertainty sources : Structured : parametric uncertainty, multimodel uncertainty Unstructured
Today (10/23/01) Today. Reading Assignment: 6.3. Gain/phase margin lead/lag compensator Ref. 6.4, 6.7, 6.10
 Today. Reading Assignment: 6.3. Gain/phase margin lead/lag compensator Ref. 6.4, 6.7, 6.10") Today Today (10/23/01) Gain/phase margin lead/lag compensator Ref. 6.4, 6.7, 6.10 Reading Assignment: 6.3 Last Time In the last lecture, we discussed control design through shaping of the loop gain GK:
Today Today (10/23/01) Gain/phase margin lead/lag compensator Ref. 6.4, 6.7, 6.10 Reading Assignment: 6.3 Last Time In the last lecture, we discussed control design through shaping of the loop gain GK:
Design Methods for Control Systems
 Design Methods for Control Systems Maarten Steinbuch TU/e Gjerrit Meinsma UT Dutch Institute of Systems and Control Winter term 2002-2003 Schedule November 25 MSt December 2 MSt Homework # 1 December 9
Design Methods for Control Systems Maarten Steinbuch TU/e Gjerrit Meinsma UT Dutch Institute of Systems and Control Winter term 2002-2003 Schedule November 25 MSt December 2 MSt Homework # 1 December 9
Robust and Optimal Control, Spring A: SISO Feedback Control A.1 Internal Stability and Youla Parameterization
 Robust and Optimal Control, Spring 2015 Instructor: Prof. Masayuki Fujita (S5-303B) A: SISO Feedback Control A.1 Internal Stability and Youla Parameterization A.2 Sensitivity and Feedback Performance A.3
Robust and Optimal Control, Spring 2015 Instructor: Prof. Masayuki Fujita (S5-303B) A: SISO Feedback Control A.1 Internal Stability and Youla Parameterization A.2 Sensitivity and Feedback Performance A.3
Robust Control of Linear Quantum Systems
 B. Ross Barmish Workshop 2009 1 Robust Control of Linear Quantum Systems Ian R. Petersen School of ITEE, University of New South Wales @ the Australian Defence Force Academy, Based on joint work with Matthew
B. Ross Barmish Workshop 2009 1 Robust Control of Linear Quantum Systems Ian R. Petersen School of ITEE, University of New South Wales @ the Australian Defence Force Academy, Based on joint work with Matthew
ROBUST STABILITY AND PERFORMANCE ANALYSIS* [8 # ]
![ROBUST STABILITY AND PERFORMANCE ANALYSIS* [8 # ]](/thumbs/89/99011882.jpg "ROBUST STABILITY AND PERFORMANCE ANALYSIS* [8 # ]") ROBUST STABILITY AND PERFORMANCE ANALYSIS* [8 # ] General control configuration with uncertainty [8.1] For our robustness analysis we use a system representation in which the uncertain perturbations are
ROBUST STABILITY AND PERFORMANCE ANALYSIS* [8 # ] General control configuration with uncertainty [8.1] For our robustness analysis we use a system representation in which the uncertain perturbations are
CDS 101/110a: Lecture 8-1 Frequency Domain Design
 CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
Topic # Feedback Control Systems
 Topic #17 16.31 Feedback Control Systems Deterministic LQR Optimal control and the Riccati equation Weight Selection Fall 2007 16.31 17 1 Linear Quadratic Regulator (LQR) Have seen the solutions to the
Topic #17 16.31 Feedback Control Systems Deterministic LQR Optimal control and the Riccati equation Weight Selection Fall 2007 16.31 17 1 Linear Quadratic Regulator (LQR) Have seen the solutions to the
CDS 101/110a: Lecture 10-1 Robust Performance
 CDS 11/11a: Lecture 1-1 Robust Performance Richard M. Murray 1 December 28 Goals: Describe how to represent uncertainty in process dynamics Describe how to analyze a system in the presence of uncertainty
CDS 11/11a: Lecture 1-1 Robust Performance Richard M. Murray 1 December 28 Goals: Describe how to represent uncertainty in process dynamics Describe how to analyze a system in the presence of uncertainty
Here represents the impulse (or delta) function. is an diagonal matrix of intensities, and is an diagonal matrix of intensities.
 function. is an diagonal matrix of intensities, and is an diagonal matrix of intensities.") 19 KALMAN FILTER 19.1 Introduction In the previous section, we derived the linear quadratic regulator as an optimal solution for the fullstate feedback control problem. The inherent assumption was that
19 KALMAN FILTER 19.1 Introduction In the previous section, we derived the linear quadratic regulator as an optimal solution for the fullstate feedback control problem. The inherent assumption was that
Introduction to Control (034040) lecture no. 2
 lecture no. 2") Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
ME 234, Lyapunov and Riccati Problems. 1. This problem is to recall some facts and formulae you already know. e Aτ BB e A τ dτ
 ME 234, Lyapunov and Riccati Problems. This problem is to recall some facts and formulae you already know. (a) Let A and B be matrices of appropriate dimension. Show that (A, B) is controllable if and
ME 234, Lyapunov and Riccati Problems. This problem is to recall some facts and formulae you already know. (a) Let A and B be matrices of appropriate dimension. Show that (A, B) is controllable if and
MEM 355 Performance Enhancement of Dynamical Systems MIMO Introduction
 MEM 355 Performance Enhancement of Dynamical Systems MIMO Introduction Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University 11/2/214 Outline Solving State Equations Variation
MEM 355 Performance Enhancement of Dynamical Systems MIMO Introduction Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University 11/2/214 Outline Solving State Equations Variation
Subject: Optimal Control Assignment-1 (Related to Lecture notes 1-10)
") Subject: Optimal Control Assignment- (Related to Lecture notes -). Design a oil mug, shown in fig., to hold as much oil possible. The height and radius of the mug should not be more than 6cm. The mug must
Subject: Optimal Control Assignment- (Related to Lecture notes -). Design a oil mug, shown in fig., to hold as much oil possible. The height and radius of the mug should not be more than 6cm. The mug must
A brief introduction to robust H control
 A brief introduction to robust H control Jean-Marc Biannic System Control and Flight Dynamics Department ONERA, Toulouse. http://www.onera.fr/staff/jean-marc-biannic/ http://jm.biannic.free.fr/ European
A brief introduction to robust H control Jean-Marc Biannic System Control and Flight Dynamics Department ONERA, Toulouse. http://www.onera.fr/staff/jean-marc-biannic/ http://jm.biannic.free.fr/ European
Lecture 15: H Control Synthesis
 c A. Shiriaev/L. Freidovich. March 12, 2010. Optimal Control for Linear Systems: Lecture 15 p. 1/14 Lecture 15: H Control Synthesis Example c A. Shiriaev/L. Freidovich. March 12, 2010. Optimal Control
c A. Shiriaev/L. Freidovich. March 12, 2010. Optimal Control for Linear Systems: Lecture 15 p. 1/14 Lecture 15: H Control Synthesis Example c A. Shiriaev/L. Freidovich. March 12, 2010. Optimal Control
Structured Uncertainty and Robust Performance
 Structured Uncertainty and Robust Performance ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Devron Profile Control Solutions Outline Structured uncertainty: motivating example. Structured
Structured Uncertainty and Robust Performance ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Devron Profile Control Solutions Outline Structured uncertainty: motivating example. Structured
Robust Loop Shaping Controller Design for Spectral Models by Quadratic Programming
 Robust Loop Shaping Controller Design for Spectral Models by Quadratic Programming Gorka Galdos, Alireza Karimi and Roland Longchamp Abstract A quadratic programming approach is proposed to tune fixed-order
Robust Loop Shaping Controller Design for Spectral Models by Quadratic Programming Gorka Galdos, Alireza Karimi and Roland Longchamp Abstract A quadratic programming approach is proposed to tune fixed-order
Chapter 2. Classical Control System Design. Dutch Institute of Systems and Control
 Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
DISTURBANCE OBSERVER BASED CONTROL: CONCEPTS, METHODS AND CHALLENGES
 DISTURBANCE OBSERVER BASED CONTROL: CONCEPTS, METHODS AND CHALLENGES Wen-Hua Chen Professor in Autonomous Vehicles Department of Aeronautical and Automotive Engineering Loughborough University 1 Outline
DISTURBANCE OBSERVER BASED CONTROL: CONCEPTS, METHODS AND CHALLENGES Wen-Hua Chen Professor in Autonomous Vehicles Department of Aeronautical and Automotive Engineering Loughborough University 1 Outline
MEM 355 Performance Enhancement of Dynamical Systems
 MEM 355 Performance Enhancement of Dynamical Systems Frequency Domain Design Intro Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University /5/27 Outline Closed Loop Transfer
MEM 355 Performance Enhancement of Dynamical Systems Frequency Domain Design Intro Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University /5/27 Outline Closed Loop Transfer
Robust fixed-order H Controller Design for Spectral Models by Convex Optimization
 Robust fixed-order H Controller Design for Spectral Models by Convex Optimization Alireza Karimi, Gorka Galdos and Roland Longchamp Abstract A new approach for robust fixed-order H controller design by
Robust fixed-order H Controller Design for Spectral Models by Convex Optimization Alireza Karimi, Gorka Galdos and Roland Longchamp Abstract A new approach for robust fixed-order H controller design by
From the multivariable Nyquist plot, if 1/k < or 1/k > 5.36, or 0.19 < k < 2.7, then the closed loop system is stable.
 1. (a) Multivariable Nyquist Plot (diagonal uncertainty case) dash=neg freq solid=pos freq 2.5 2 1.5 1.5 Im -.5-1 -1.5-2 -2.5 1 2 3 4 5 Re From the multivariable Nyquist plot, if 1/k < -.37 or 1/k > 5.36,
1. (a) Multivariable Nyquist Plot (diagonal uncertainty case) dash=neg freq solid=pos freq 2.5 2 1.5 1.5 Im -.5-1 -1.5-2 -2.5 1 2 3 4 5 Re From the multivariable Nyquist plot, if 1/k < -.37 or 1/k > 5.36,
Classify a transfer function to see which order or ramp it can follow and with which expected error.
 Dr. J. Tani, Prof. Dr. E. Frazzoli 5-059-00 Control Systems I (Autumn 208) Exercise Set 0 Topic: Specifications for Feedback Systems Discussion: 30.. 208 Learning objectives: The student can grizzi@ethz.ch,
Dr. J. Tani, Prof. Dr. E. Frazzoli 5-059-00 Control Systems I (Autumn 208) Exercise Set 0 Topic: Specifications for Feedback Systems Discussion: 30.. 208 Learning objectives: The student can grizzi@ethz.ch,
Dissipativity. Outline. Motivation. Dissipative Systems. M. Sami Fadali EBME Dept., UNR
 Dissipativity M. Sami Fadali EBME Dept., UNR 1 Outline Differential storage functions. QSR Dissipativity. Algebraic conditions for dissipativity. Stability of dissipative systems. Feedback Interconnections
Dissipativity M. Sami Fadali EBME Dept., UNR 1 Outline Differential storage functions. QSR Dissipativity. Algebraic conditions for dissipativity. Stability of dissipative systems. Feedback Interconnections
6.241 Dynamic Systems and Control
 6.41 Dynamic Systems and Control Lecture 5: H Synthesis Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology May 11, 011 E. Frazzoli (MIT) Lecture 5: H Synthesis May 11, 011
6.41 Dynamic Systems and Control Lecture 5: H Synthesis Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology May 11, 011 E. Frazzoli (MIT) Lecture 5: H Synthesis May 11, 011
Feedback Control of Turbulent Wall Flows
 Feedback Control of Turbulent Wall Flows Dipartimento di Ingegneria Aerospaziale Politecnico di Milano Outline Introduction Standard approach Wiener-Hopf approach Conclusions Drag reduction A model problem:
Feedback Control of Turbulent Wall Flows Dipartimento di Ingegneria Aerospaziale Politecnico di Milano Outline Introduction Standard approach Wiener-Hopf approach Conclusions Drag reduction A model problem:
Robust Control 2 Controllability, Observability & Transfer Functions
 Robust Control 2 Controllability, Observability & Transfer Functions Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University /26/24 Outline Reachable Controllability Distinguishable
Robust Control 2 Controllability, Observability & Transfer Functions Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University /26/24 Outline Reachable Controllability Distinguishable
Linear Quadratic Gausssian Control Design with Loop Transfer Recovery
 Linear Quadratic Gausssian Control Design with Loop Transfer Recovery Leonid Freidovich Department of Mathematics Michigan State University MI 48824, USA e-mail:leonid@math.msu.edu http://www.math.msu.edu/
Linear Quadratic Gausssian Control Design with Loop Transfer Recovery Leonid Freidovich Department of Mathematics Michigan State University MI 48824, USA e-mail:leonid@math.msu.edu http://www.math.msu.edu/
Return Difference Function and Closed-Loop Roots Single-Input/Single-Output Control Systems
 Spectral Properties of Linear- Quadratic Regulators Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 2018! Stability margins of single-input/singleoutput (SISO) systems! Characterizations
Spectral Properties of Linear- Quadratic Regulators Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 2018! Stability margins of single-input/singleoutput (SISO) systems! Characterizations
ROBUST STABILITY AND PERFORMANCE ANALYSIS OF UNSTABLE PROCESS WITH DEAD TIME USING Mu SYNTHESIS
 ROBUST STABILITY AND PERFORMANCE ANALYSIS OF UNSTABLE PROCESS WITH DEAD TIME USING Mu SYNTHESIS I. Thirunavukkarasu 1, V. I. George 1, G. Saravana Kumar 1 and A. Ramakalyan 2 1 Department o Instrumentation
ROBUST STABILITY AND PERFORMANCE ANALYSIS OF UNSTABLE PROCESS WITH DEAD TIME USING Mu SYNTHESIS I. Thirunavukkarasu 1, V. I. George 1, G. Saravana Kumar 1 and A. Ramakalyan 2 1 Department o Instrumentation
Variable Structure Control ~ Disturbance Rejection. Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University
 Variable Structure Control ~ Disturbance Rejection Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline Linear Tracking & Disturbance Rejection Variable Structure
Variable Structure Control ~ Disturbance Rejection Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline Linear Tracking & Disturbance Rejection Variable Structure
MEM 355 Performance Enhancement of Dynamical Systems
 MEM 355 Performance Enhancement of Dynamical Systems State Space Design Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University 11/8/2016 Outline State space techniques emerged
MEM 355 Performance Enhancement of Dynamical Systems State Space Design Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University 11/8/2016 Outline State space techniques emerged
Autonomous Helicopter Landing A Nonlinear Output Regulation Perspective
 Autonomous Helicopter Landing A Nonlinear Output Regulation Perspective Andrea Serrani Department of Electrical and Computer Engineering Collaborative Center for Control Sciences The Ohio State University
Autonomous Helicopter Landing A Nonlinear Output Regulation Perspective Andrea Serrani Department of Electrical and Computer Engineering Collaborative Center for Control Sciences The Ohio State University
Iterative Controller Tuning Using Bode s Integrals
 Iterative Controller Tuning Using Bode s Integrals A. Karimi, D. Garcia and R. Longchamp Laboratoire d automatique, École Polytechnique Fédérale de Lausanne (EPFL), 05 Lausanne, Switzerland. email: alireza.karimi@epfl.ch
Iterative Controller Tuning Using Bode s Integrals A. Karimi, D. Garcia and R. Longchamp Laboratoire d automatique, École Polytechnique Fédérale de Lausanne (EPFL), 05 Lausanne, Switzerland. email: alireza.karimi@epfl.ch
Stability of CL System
 Stability of CL System Consider an open loop stable system that becomes unstable with large gain: At the point of instability, K( j) G( j) = 1 0dB K( j) G( j) K( j) G( j) K( j) G( j) =± 180 o 180 o Closed
Stability of CL System Consider an open loop stable system that becomes unstable with large gain: At the point of instability, K( j) G( j) = 1 0dB K( j) G( j) K( j) G( j) K( j) G( j) =± 180 o 180 o Closed
COURSE OUTLINE. Introduction Signals and Noise Filtering Noise Sensors and associated electronics. Sensors, Signals and Noise 1
 Sensors, Signals and Noise 1 COURSE OUTLINE Introduction Signals and Noise Filtering Noise Sensors and associated electronics Processing Noise with Linear Filters 2 Mathematical Foundations Filtering Stationary
Sensors, Signals and Noise 1 COURSE OUTLINE Introduction Signals and Noise Filtering Noise Sensors and associated electronics Processing Noise with Linear Filters 2 Mathematical Foundations Filtering Stationary
Chapter 5. Standard LTI Feedback Optimization Setup. 5.1 The Canonical Setup
 Chapter 5 Standard LTI Feedback Optimization Setup Efficient LTI feedback optimization algorithms comprise a major component of modern feedback design approach: application problems involving complex models
Chapter 5 Standard LTI Feedback Optimization Setup Efficient LTI feedback optimization algorithms comprise a major component of modern feedback design approach: application problems involving complex models
Control Systems. State Estimation.
 State Estimation chibum@seoultech.ac.kr Outline Dominant pole design Symmetric root locus State estimation We are able to place the CLPs arbitrarily by feeding back all the states: u = Kx. But these may
State Estimation chibum@seoultech.ac.kr Outline Dominant pole design Symmetric root locus State estimation We are able to place the CLPs arbitrarily by feeding back all the states: u = Kx. But these may
Multi-Model Adaptive Regulation for a Family of Systems Containing Different Zero Structures
 Preprints of the 19th World Congress The International Federation of Automatic Control Multi-Model Adaptive Regulation for a Family of Systems Containing Different Zero Structures Eric Peterson Harry G.
Preprints of the 19th World Congress The International Federation of Automatic Control Multi-Model Adaptive Regulation for a Family of Systems Containing Different Zero Structures Eric Peterson Harry G.
Stationary trajectories, singular Hamiltonian systems and ill-posed Interconnection
 Stationary trajectories, singular Hamiltonian systems and ill-posed Interconnection S.C. Jugade, Debasattam Pal, Rachel K. Kalaimani and Madhu N. Belur Department of Electrical Engineering Indian Institute
Stationary trajectories, singular Hamiltonian systems and ill-posed Interconnection S.C. Jugade, Debasattam Pal, Rachel K. Kalaimani and Madhu N. Belur Department of Electrical Engineering Indian Institute
Control System Design
 ELEC4410 Control System Design Lecture 19: Feedback from Estimated States and Discrete-Time Control Design Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science
ELEC4410 Control System Design Lecture 19: Feedback from Estimated States and Discrete-Time Control Design Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science
A Probability Review
 A Probability Review Outline: A probability review Shorthand notation: RV stands for random variable EE 527, Detection and Estimation Theory, # 0b 1 A Probability Review Reading: Go over handouts 2 5 in
A Probability Review Outline: A probability review Shorthand notation: RV stands for random variable EE 527, Detection and Estimation Theory, # 0b 1 A Probability Review Reading: Go over handouts 2 5 in
9 The LQR Problem Revisited
 9 he LQR Problem Revisited Problem: Compute a state feedback controller u(t) = Kx(t) that stabilizes the closed loop system and minimizes J := lim E [ z(t) z(t) ] t for the LI system Assumptions: a) D
9 he LQR Problem Revisited Problem: Compute a state feedback controller u(t) = Kx(t) that stabilizes the closed loop system and minimizes J := lim E [ z(t) z(t) ] t for the LI system Assumptions: a) D
Wind Turbine Control
 Wind Turbine Control W. E. Leithead University of Strathclyde, Glasgow Supergen Student Workshop 1 Outline 1. Introduction 2. Control Basics 3. General Control Objectives 4. Constant Speed Pitch Regulated
Wind Turbine Control W. E. Leithead University of Strathclyde, Glasgow Supergen Student Workshop 1 Outline 1. Introduction 2. Control Basics 3. General Control Objectives 4. Constant Speed Pitch Regulated
Linear State Feedback Controller Design
 Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
9. Two-Degrees-of-Freedom Design
 9. Two-Degrees-of-Freedom Design In some feedback schemes we have additional degrees-offreedom outside the feedback path. For example, feed forwarding known disturbance signals or reference signals. In
9. Two-Degrees-of-Freedom Design In some feedback schemes we have additional degrees-offreedom outside the feedback path. For example, feed forwarding known disturbance signals or reference signals. In
DERIVATIVE FREE OUTPUT FEEDBACK ADAPTIVE CONTROL
 DERIVATIVE FREE OUTPUT FEEDBACK ADAPTIVE CONTROL Tansel YUCELEN, * Kilsoo KIM, and Anthony J. CALISE Georgia Institute of Technology, Yucelen Atlanta, * GA 30332, USA * tansel@gatech.edu AIAA Guidance,
DERIVATIVE FREE OUTPUT FEEDBACK ADAPTIVE CONTROL Tansel YUCELEN, * Kilsoo KIM, and Anthony J. CALISE Georgia Institute of Technology, Yucelen Atlanta, * GA 30332, USA * tansel@gatech.edu AIAA Guidance,
LQR, Kalman Filter, and LQG. Postgraduate Course, M.Sc. Electrical Engineering Department College of Engineering University of Salahaddin
 LQR, Kalman Filter, and LQG Postgraduate Course, M.Sc. Electrical Engineering Department College of Engineering University of Salahaddin May 2015 Linear Quadratic Regulator (LQR) Consider a linear system
LQR, Kalman Filter, and LQG Postgraduate Course, M.Sc. Electrical Engineering Department College of Engineering University of Salahaddin May 2015 Linear Quadratic Regulator (LQR) Consider a linear system
Robust Control, H, ν and Glover-McFarlane
 Robust Control, H, ν and Glover-McFarlane Department of Automatic Control LTH, Lund University Robust Control 1 MIMO performance 2 Robustness and the H -norm 3 H -control 4 ν-gap metric 5 Glover-MacFarlane
Robust Control, H, ν and Glover-McFarlane Department of Automatic Control LTH, Lund University Robust Control 1 MIMO performance 2 Robustness and the H -norm 3 H -control 4 ν-gap metric 5 Glover-MacFarlane
The loop shaping paradigm. Lecture 7. Loop analysis of feedback systems (2) Essential specifications (2)
 Essential specifications (2)") Lecture 7. Loop analysis of feedback systems (2). Loop shaping 2. Performance limitations The loop shaping paradigm. Estimate performance and robustness of the feedback system from the loop transfer L(jω)
Lecture 7. Loop analysis of feedback systems (2). Loop shaping 2. Performance limitations The loop shaping paradigm. Estimate performance and robustness of the feedback system from the loop transfer L(jω)
Closed-Form Solution Of Absolute Orientation Using Unit Quaternions
 Closed-Form Solution Of Absolute Orientation Using Unit Berthold K. P. Horn Department of Computer and Information Sciences November 11, 2004 Outline 1 Introduction 2 3 The Problem Given: two sets of corresponding
Closed-Form Solution Of Absolute Orientation Using Unit Berthold K. P. Horn Department of Computer and Information Sciences November 11, 2004 Outline 1 Introduction 2 3 The Problem Given: two sets of corresponding
Reduced Basis Method for Parametric
 1/24 Reduced Basis Method for Parametric H 2 -Optimal Control Problems NUMOC2017 Andreas Schmidt, Bernard Haasdonk Institute for Applied Analysis and Numerical Simulation, University of Stuttgart andreas.schmidt@mathematik.uni-stuttgart.de
1/24 Reduced Basis Method for Parametric H 2 -Optimal Control Problems NUMOC2017 Andreas Schmidt, Bernard Haasdonk Institute for Applied Analysis and Numerical Simulation, University of Stuttgart andreas.schmidt@mathematik.uni-stuttgart.de
Model Uncertainty and Robust Stability for Multivariable Systems
 Model Uncertainty and Robust Stability for Multivariable Systems ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Devron Profile Control Solutions Outline Representing model uncertainty.
Model Uncertainty and Robust Stability for Multivariable Systems ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Devron Profile Control Solutions Outline Representing model uncertainty.
Exam. 135 minutes, 15 minutes reading time
 Exam August 6, 208 Control Systems II (5-0590-00) Dr. Jacopo Tani Exam Exam Duration: 35 minutes, 5 minutes reading time Number of Problems: 35 Number of Points: 47 Permitted aids: 0 pages (5 sheets) A4.
Exam August 6, 208 Control Systems II (5-0590-00) Dr. Jacopo Tani Exam Exam Duration: 35 minutes, 5 minutes reading time Number of Problems: 35 Number of Points: 47 Permitted aids: 0 pages (5 sheets) A4.
FREQUENCY-RESPONSE DESIGN
 ECE45/55: Feedback Control Systems. 9 FREQUENCY-RESPONSE DESIGN 9.: PD and lead compensation networks The frequency-response methods we have seen so far largely tell us about stability and stability margins
ECE45/55: Feedback Control Systems. 9 FREQUENCY-RESPONSE DESIGN 9.: PD and lead compensation networks The frequency-response methods we have seen so far largely tell us about stability and stability margins
Flight Dynamics & Control Equations of Motion of 6 dof Rigid Aircraft-Kinematics
 Flight Dynamic & Control Equation of Motion of 6 dof Rigid Aircraft-Kinematic Harry G. Kwatny Department of Mechanical Engineering & Mechanic Drexel Univerity Outline Rotation Matrix Angular Velocity Euler
Flight Dynamic & Control Equation of Motion of 6 dof Rigid Aircraft-Kinematic Harry G. Kwatny Department of Mechanical Engineering & Mechanic Drexel Univerity Outline Rotation Matrix Angular Velocity Euler
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
Dr Ian R. Manchester
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Vorticity and Dynamics
 Vorticity and Dynamics In Navier-Stokes equation Nonlinear term ω u the Lamb vector is related to the nonlinear term u 2 (u ) u = + ω u 2 Sort of Coriolis force in a rotation frame Viscous term ν u = ν
Vorticity and Dynamics In Navier-Stokes equation Nonlinear term ω u the Lamb vector is related to the nonlinear term u 2 (u ) u = + ω u 2 Sort of Coriolis force in a rotation frame Viscous term ν u = ν
Raktim Bhattacharya. . AERO 422: Active Controls for Aerospace Vehicles. Frequency Response-Design Method
 .. AERO 422: Active Controls for Aerospace Vehicles Frequency Response- Method Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. ... Response to
.. AERO 422: Active Controls for Aerospace Vehicles Frequency Response- Method Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. ... Response to
Quasi-Newton methods for minimization
 Quasi-Newton methods for minimization Lectures for PHD course on Numerical optimization Enrico Bertolazzi DIMS Universitá di Trento November 21 December 14, 2011 Quasi-Newton methods for minimization 1
Quasi-Newton methods for minimization Lectures for PHD course on Numerical optimization Enrico Bertolazzi DIMS Universitá di Trento November 21 December 14, 2011 Quasi-Newton methods for minimization 1
Control 2. Proportional and Integral control
 Control 2 Proportional and Integral control 1 Disturbance rejection in Proportional Control Θ i =5 + _ Controller K P =20 Motor K=2.45 Θ o Consider first the case where the motor steadystate gain = 2.45
Control 2 Proportional and Integral control 1 Disturbance rejection in Proportional Control Θ i =5 + _ Controller K P =20 Motor K=2.45 Θ o Consider first the case where the motor steadystate gain = 2.45
Pole placement control: state space and polynomial approaches Lecture 2
 : state space and polynomial approaches Lecture 2 : a state O. Sename 1 1 Gipsa-lab, CNRS-INPG, FRANCE Olivier.Sename@gipsa-lab.fr www.gipsa-lab.fr/ o.sename -based November 21, 2017 Outline : a state
: state space and polynomial approaches Lecture 2 : a state O. Sename 1 1 Gipsa-lab, CNRS-INPG, FRANCE Olivier.Sename@gipsa-lab.fr www.gipsa-lab.fr/ o.sename -based November 21, 2017 Outline : a state
Chapter 7 Interconnected Systems and Feedback: Well-Posedness, Stability, and Performance 7. Introduction Feedback control is a powerful approach to o
 Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A. Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter 7 Interconnected
Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A. Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter 7 Interconnected
MRAGPC Control of MIMO Processes with Input Constraints and Disturbance
 Proceedings of the World Congress on Engineering and Computer Science 9 Vol II WCECS 9, October -, 9, San Francisco, USA MRAGPC Control of MIMO Processes with Input Constraints and Disturbance A. S. Osunleke,
Proceedings of the World Congress on Engineering and Computer Science 9 Vol II WCECS 9, October -, 9, San Francisco, USA MRAGPC Control of MIMO Processes with Input Constraints and Disturbance A. S. Osunleke,
Design and Tuning of Fractional-order PID Controllers for Time-delayed Processes
 Design and Tuning of Fractional-order PID Controllers for Time-delayed Processes Emmanuel Edet Technology and Innovation Centre University of Strathclyde 99 George Street Glasgow, United Kingdom emmanuel.edet@strath.ac.uk
Design and Tuning of Fractional-order PID Controllers for Time-delayed Processes Emmanuel Edet Technology and Innovation Centre University of Strathclyde 99 George Street Glasgow, United Kingdom emmanuel.edet@strath.ac.uk
Outline. Classical Control. Lecture 1
 Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
Prüfung Regelungstechnik I (Control Systems I) Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam!
 Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam!") Prüfung Regelungstechnik I (Control Systems I) Prof. Dr. Lino Guzzella 29. 8. 2 Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam! Do not mark up this translation aid
Prüfung Regelungstechnik I (Control Systems I) Prof. Dr. Lino Guzzella 29. 8. 2 Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam! Do not mark up this translation aid
Contents lecture 5. Automatic Control III. Summary of lecture 4 (II/II) Summary of lecture 4 (I/II) u y F r. Lecture 5 H 2 and H loop shaping
 Summary of lecture 4 (I/II) u y F r. Lecture 5 H 2 and H loop shaping") Contents lecture 5 Automatic Control III Lecture 5 H 2 and H loop shaping Thomas Schön Division of Systems and Control Department of Information Technology Uppsala University. Email: thomas.schon@it.uu.se,
Contents lecture 5 Automatic Control III Lecture 5 H 2 and H loop shaping Thomas Schön Division of Systems and Control Department of Information Technology Uppsala University. Email: thomas.schon@it.uu.se,