ESTIMATING THE MEAN LEVEL OF FINE PARTICULATE MATTER: AN APPLICATION OF SPATIAL STATISTICS
|
|
|
- Lucy Howard
- 5 years ago
- Views:
Transcription
1 ESTIMATING THE MEAN LEVEL OF FINE PARTICULATE MATTER: AN APPLICATION OF SPATIAL STATISTICS Richard L. Smith Department of Statistics and Operations Research University of North Carolina Chapel Hill, N.C., U.S.A. Boston University April
2 I. CONSTRUCTING A MAP OF ANNUAL AVERAGES OF FINE PARTICULATE MATTER Based on Smith, Kolenikov and Cox, Journal of Geophysical Research, II. SOME THEORETICAL ASPECTS OF BAYESIAN SPATIAL PREDICTION Work currently in progress, with Z. Zhu, J. Ibrahim and E. Shameldin (UNC). 2
3 Background to Part I A new set of air pollution standards, first proposed in 1997, is finally being implemented by the U.S. Environmental Protection Agency (EPA). One of the requirements is that the mean level of fine particulate matter (PM 2.5 ) at any location should be no more than 15 µg/m 3. A network of several hundred monitors has been set up to assess this. The present study is based on 1999 data for a small portion of this network, 74 monitors in North Carolina, South Carolina and Georgia. We converted the raw values to weekly averages, but even so more than 1 4 of the data are missing. The EPA also recorded a land-use variable, classified as one of five types of land-use: agricultural (A), commercial (C), forest (F), industrial (I) and residential (R). 3
4 4
5 Exploratory data analysis The first issue considered is whether to make any transformation, such as square roots or logarithms, of the raw PM 2.5 values. We show a plot of sample variance against sample mean, across all 74 stations, for each of three transformations, (a) no transformation, (b) square root transformation, (c) logarithmic transformation. On the basis that (b) is the closest fit to a constant-variance model, the rest of the analysis is based on the square root of PM 2.5 as a variance-stabilizing transformation. 5
6 6
7 The time trend The time trend was estimated both as a B-spline smooth curve and (more simply) by using a weekly indicator variable to represent the overall mean level for that week. Fig. (a) shows both versions of the fitted time trend, with all data points superimposed. Also shown are the same fitted time trend curves, but with different portions of the data superimposed, (b) (d) corresponding to each of the three states, (e) (i) corresponding to each of the five land-use variables. The results show a significant discrepancy between states, with Georgia values generally higher than the overall mean, while the land-use variables show significant variations in the directions one would expect. 7
8 8
9 These comparisons suggest the model y xt = w t + ψ x + θ x + η xt (1) in which y xt is the square root of PM 2.5 in location x in week t, w t is a week effect, ψ x is the spatial mean at location x (in practice, estimated through a thin-plate spline representation), θ x is a land-use effect corresponding to the land-use as site x, and η xt is a random error. So far we have ignored temporal and spatial correlations among the η xt, but we consider these next. 9
10 Spatial and temporal dependence Take residuals from preceding linear regression. Plots of autocorrelations suggest series are uncorrelated in time but not in space. 10
11 11
12 We show variograms of residuals from simple linear regression, where a number of subsets of the data (classified by state and also by season) have been identified to look for comparability of the estimated variogram among different subsets of data. Key points are Substantial inhomogeneity among subgroups despite initial variance stabilization Does not seem to follow standard nugget-range-sill shape 12
13 13
14 We fit the power law variogram { 0 if h = 0, γ(h) = θ 0 + θ 1 h λ if h > 0, where θ 0 > 0, θ 1 > 0, 0 λ < 2. (2) 14
15 To fit this model by maximum likelihood, we need the concept of generalized covariances, introduced by Matheron (1973). For modern references see Cressie (1993), Chilès and Delfiner (1999) or Stein (1999). In the present context the key formula is the following: for an intrinsically stationary process defined by a semivariogram γ, Cov x ν x η x,t, x κ x η x,t = ν x κ x G( x x ), x x provided x ν x = x κ x = 0. Here G is known as the generalized covariance function: however for an intrinsically stationary process, it suffices to take G = γ. 15
16 Practical implementation: In (1), replace each y xt by yxt = y xt n 1 t x y x t where the second sum is over all x values available in week t; n t is the number of such x values in a given week. With some further simplifications we replace (1) by where y xt = ψ x + θ x + η xt (3) Cov{η x,t, η x,t } = 1 n t + 1 n t 1 n 2 t x 1 γ( x x 1 ) x 1 γ( x x 1 ) γ( x x ) x 1 x 2 γ( x 1 x 2 ). (4) The model defined by (2) (4) may now be fitted by maximum likelihood. 16
17 There are additional complications because of the missing values, which mean that n t and the fitted covariance matrix are different from week to week. The present data set is relatively small and we were still able to compute exact maximum likelihood, but some variants of the EM algorithm (Little and Rubin 1987, McLachlan and Krishnan 1997) were also used, and remain the focus of further research. 17
18 Results The model (3) was fitted to the data values from which each weekly mean had been subtracted. The residuals ηxt were assumed independent at different time points but with spatial covariances given by (4) with (2). As an example of the results, the maximum likelihood of the parameter θ 2 was 0.92 with standard error Since a linear variogram corresponds to θ 2 = 1, this shows that the spatial dependence is not significantly different from a linear variogram. 18
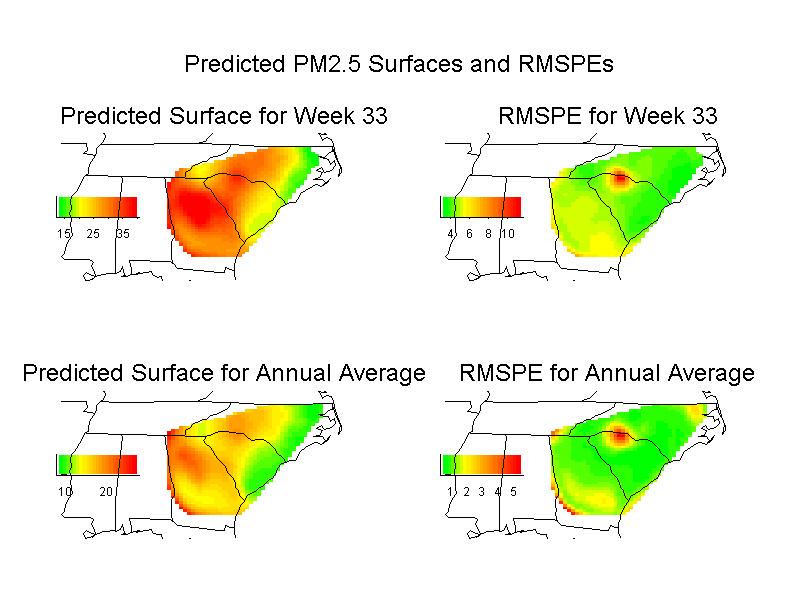
19 The fitted model was then used to construct a predicted surface, with estimated root mean squared prediction error (RMSPE), for each week of the year and also for the average over all weeks. The latter is of greatest interest in the context of EPA standards setting. 19
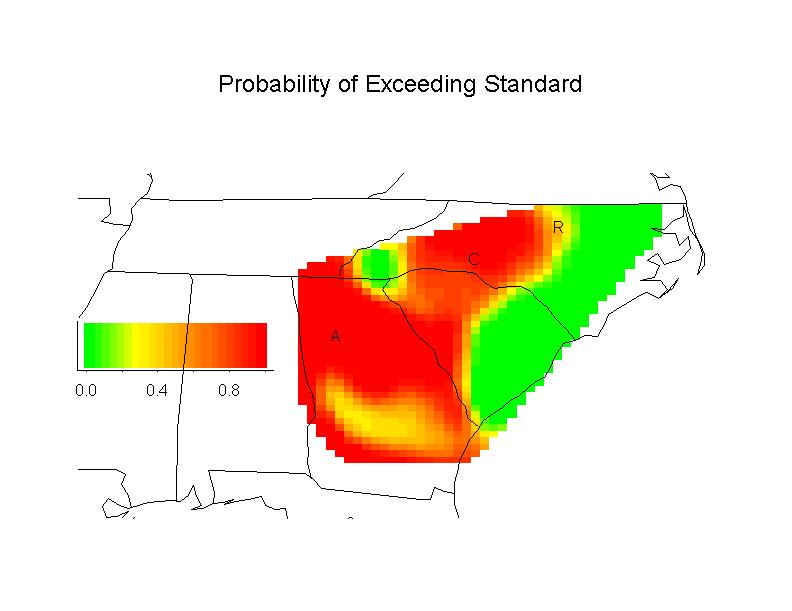
20 We show the predicted surface and RMSPE for week 33 (the week with highest average PM 2.5 ) and overall for the annual mean. WE also show shows the estimated probability that any particular location exceeds the 15 µg/m 3 annual mean standard. These maps are based on kriging the residuals ηxt in (2) and then combining them with the estimated fixed effects for ψx and θx, transforming back to the original scale of the data for the actual plots. The RMSPE values used here take into account the averaging of kriged values, but do not take account of the additional uncertainty in estimating the parameters θ 1 and θ 2. Fig. 6 is based on the assumption that (on a square root scale) the difference between the predicted and true values, scaled by the RMSPE, has a standard normal distribution. 20
21 It can be seen that substantial parts of the region, including the western portions of North and South Carolina and virtually the whole of the state of Georgia, appear to be in violation of the standard. Of the three major cities marked on the last figure, Atlanta and Charlotte are clearly in the violation zone; Raleigh is on the boundary of it. In future work, we hope to extend this analysis to other parts of the country (this will certainly involve consideration of nonstationary spatial models), to analyze more recent data, and to consider the associated network design questions. 21
22 22
23 23
24 II. SOME THEORETICAL ASPECTS OF SPATIAL PREDICTION We assume data follow a Gaussian random field with mean and covariance functions represented as functions of finite-dimensional parameters. Define the prediction problem as ( ) [( Y Xβ N x T 0 β Y 0 ), ( V w T w v 0 where Y is an n-dimensional vector of observations, Y 0 is some unobserved quantity we want to predict, X and x 0 are known regressors, and β is a p-dimensional vectors of unknown regression coefficients. For the moment, we assume V, w and v 0 are known. )] 24 (5)
25 Where notationally convienient, we also define Y = write (5) as ( Y Y 0 ) and Y N[X β, V ]. (6) 25
26 Specifying the Covariances The most common and widely used spatial models (stationary and isotropic) assume the covariance between components Y i and Y j is a function of the (scalar) distance between them, C(d ij ). For example, C θ (d) = σ exp where θ = (σ, ρ) (exponential), C θ (d) = σ exp where θ = (σ, ρ) (Gaussian), C θ (d) = σ 2 ν 1 Γ(ν) ( ( 2ν 1/2 d ρ d ρ ) ( ) 2 d ρ )ν, (7), (8) ( 2ν 1/2 ) d K ν, (9) ρ where K ν is a modified Bessel function and we have θ = (ν, σ, ρ) (Matérn). 26
27 Estimation Model of form Y N[Xβ, V (θ)] where the unknown parameters are (β, θ) and V (θ) is a known function of finite-dimensional parameters θ. Methods of estimation: 1. Curve fitting to the variogram, based on residuals from OLS regression. 2. Maximum likelihood (MLE) 3. Restricted maximum likelihood (REML) 27
28 The Main Prediction Problem Assume model (5) where the covariances V, w, v 0 are known but β is unknown. The classical formulation of universal kriging asks for a predictor Ŷ 0 = λ T Y that minimizes σ 2 0 = E { (Y 0 Ŷ 0 ) 2} subject to the unbiasedness condition E { Y 0 Ŷ 0 } = 0. The classical solution: Ŷ 0 = w T V 1 Y + (x 0 X T V 1 w) T (X T V 1 X) 1 X T V 1 Y, σ 2 0 = v 0 w T V 1 w + (x 0 X T V 1 w) T (X T V 1 X) 1 (x 0 X T V 1 w). 28
29 In traditional geostatistics, the covariances are estimated in a separate estimation step assuming a parametric model such as one of (7) (9). However, the estimation is then ignored in applying universal kriging. This is potentially a problem, because we would expect the prediction variance to be larger if we took into account the uncertainty in estimating θ. Bayesian methods provide a potential way round this difficulty, because in a Bayesian analysis we integrate out the predictive density with respect to the posterior density of all the unknown parameters. This is straightforward to implement via MCMC and is starting to be implemented in some widely available packages (GeoR, GeoBugs). However, this raises the question of what are the sampling properties of such procedures. The aim of the present research is to investigate such questions via asymptotic theory. 29
30 Bayesian Reformulation of Universal Kriging Assume the model (5) or equivalently (6). Suppose β (the only unknown parameter, for the moment) has a prior density which is assumed uniform across R p. The Bayesian predictive density of Y 0 given Y is then p(y 0 Y ) = f(y β)dβ f(y β)dβ. (10) This may be rewritten in the form p(y 0 Y ) = (2π) 1/2 V 1/2 X T V 1 X 1/2 e G 2 /2 V 1/2 X T V 1 X 1/2. (11) e G2 /2 where G 2 = Y T {V 1 V 1 X(X T V 1 X) 1 X T V 1 }Y is the generalized residual sum of squares for the vector Y and G 2 is the same thing for the vector Y. 30
31 However, with some algebraic manipulation we can show, V X T V 1 X V X T V 1 X = σ 2 0, (12) G 2 = G 2 + (Y 0 Ŷ 0 ) 2. (13) The Bayesian predictive density then becomes p(y 0 Y ) = 1 ( ) 2 Y0 2πσ0 2 exp 1 Ŷ 0 (14) 2 σ 0 Thus, in the case where β is the only unknown, we have rederived universal kriging as a Bayesian predictor. However, because of the usual (frequentist) derivation of universal kriging, it follows that in this case, Bayesian procedures have exact frequentist properties, e.g. a Bayesian 95% prediction interval for Y 0 will indeed cover the true Y 0 in 95% of repeated samples. σ
32 Now consider the case where θ is also unknown. We assume θ has a prior density π(θ), independent of β. The Bayesian predictive density of Y 0 given Y is now p(y 0 Y ) = f(y β, θ)π(θ)dβdθ f(y β, θ)π(θ)dβdθ = (2π) 1/2 V 1/2 X T V 1 X 1/2 e G 2 /2 π(θ)dθ V 1/2 X T V 1 X 1/2 e G2 /2. π(θ)dθ Using (12) and (13), p(y 0 Y ) may be rewritten V 1/2 X T V 1 X 1/2 e G2 /2 (2πσ 2 0 ) 1/2 exp V 1/2 X T V 1 X 1/2 e G2 /2 π(θ)dθ { ( ) } 2 1 Y0 Ŷ 0 2 σ 0 π(θ)dθ. (15) 32
33 (15) is of the form p(y 0 Y ) = ψ = e l n (θ) ψ(θ)π(θ)dθ e l n (θ) π(θ)dθ (16) where e l n(θ) is the restricted likelihood of θ given the data Y and ψ(θ) = (2πσ 2 0 ) 1/2 exp { ( ) } 2 1 Y0 Ŷ 0 2 σ 0 is the predictive density we are trying to evaluate, written as a function of θ. The function e l n(θ) may be alternatively derived from purely frequentist considerations as the likelihood of a set of orthogonal contrasts in the original X space. However, it has been known since Harville (1974) that this is equivalent to the Bayesian derivation as an integrated likelihood with respect to β. The best regarded (frequentist) estimator of θ is the so-called restricted maximum likelihood or REML estimator ˆθ which maximizes l n (θ). 33
34 Solution of (16): Use Laplace approximation. First, some notation. Let U i = l n(θ) θ i, U ij = 2 l n (θ) θ i θ j, U ijk = 3 l n (θ) θ i θ j θ k, where θ i, θ j... denote components of the vector θ. Suppose inverse of {U ij } matrix has entries {U ij }. 34
35 We shall introduce other quantities such as Q(θ) and ψ(θ) that are functions of θ, and where needed, we use suffixes to denote partial differentiation, for example Q i = Q/ θ i, ψ ij = 2 ψ/ θ i θ j. All these quantities are evaluated at the true θ unless denoted otherwise. The maximum likelihood estimator (MLE) is denoted ˆθ with components ˆθ i. The MLE of ψ is ˆψ = ψ(ˆθ). Any expression with a hat on it, such as Û ijk, means that it is to be evaluated at the MLE ˆθ rather than the true value θ. 35
36 Using summation convention, define D = 1 2 U ijku ik U jl ψ l 1 2 (ψ ij + 2ψ i Q j )U ij (17) and let ˆD denote the same expression where all terms have hats. With these conventions, an application of Laplace s integral formula leads to accurate to O p (n 1 ). ψ = ˆψ + ˆD, (18) Apply to predictive inference: recast as predictive distribution function (rather than density) so ( y λ T ) Y ψ(y; Y, θ) = Φ σ 0 where Ŷ 0 = λ T Y and σ0 2 universal kriging. are the point prediction and MSPE under 36
37 ψ (y; Y, θ) = 1 [ Φ y λ T Y, σ 0 σ 0 ψ (y; Y, θ) = 1 [ σ0 2 Φ y λ T ] Y, σ 0 ψ i (y; Y, θ) = { y λ T } [ Y θ i Φ y λ T ] Y, σ 0 σ 0 { ψ ij (y; Y, θ) = 2 y λ T } [ Y θ i θ j Φ y λ T Y + θ i σ 0 { y λ T Y σ 0 ] } Φ [ y λ T Y σ 0 θ j ]. σ 0 { y λ T Y σ 0 ] } 37
38 Define a maximum likelihood or plug-in formula by ˆψ(y; Y ) = ψ(y; Y, ˆθ). The Bayesian predictor, ψ(y; Y ), is defined by (16) in which ψ(θ) is replaced by ψ(y; Y, θ). Equations (17) and (18) so far give an approximation to ψ(y; Y ), accurate to O p (n 1 ). Now let us consider the corresponding quantile problem. Suppose we are interested in determining the value y P for which the event Y 0 y has conditional probability P, given Y. Here P is a fixed constant between 0 and 1. We can define two natural estimators by inverting the maximum likelihood and Bayesian predictive distribution functions. Specifically, ŷ P satisfies ˆψ(ŷ P ; Y ) = P and ỹ P satisfies ψ(ỹ P ; Y ) = P. In the case P 1 = α/2, P 2 = 1 α/2, the intervals (ŷ P1, ŷ P2 ) and (ỹ P1, ỹ P2 ) are natural candidates for a 100(1 α)% prediction interval for y 0. One of the questions of interest is what is the true coverage probability of either of these intervals in repeated sampling it would be ideal if the coverage probability was exactly 1 α. 38
39 For ŷ P, we simply substitute maximum likelihood estimator for unknown parameters throughout, and obtain the exact solution ŷ P = ˆλ T Y + ˆσ 0 Φ 1 (P ) (19) where Φ 1 ( ) is the inverse standard normal distribution function. For ỹ P, a Taylor expansion based on (18) suggests the approximation ỹ P = ŷ P ˆD(ŷ P ) ˆψ (ŷ P ; Y ). (20) Here ˆD(ŷ P ) is defined by (17) where we evaluate all functions of θ at θ = ˆθ and, in addition, evaluate the function ψ(y; Y, θ) at y = ŷ P ; we also define ˆψ (y; Y ) = ψ (y; Y, ˆθ). Since ˆD = O p (n 1 ), it follows that (20) is also accurate to O p (n 1 ). 39
40 Future Work 1. Investigate the computational properties of this procedure as an alternative to MCMC. 2. Bias in coverage probability how far do the true coverage probabilities of either the likelihood or Bayesian prediction intervals differ from their nominal levels? 3. Design of a network: a reasonable criterion for design of a monitoring network might be to do it to minimize the expected length of a Bayesian prediction interval (of some quantity of particular interest, such as the statewide average of particular matter). The present approach allows for a combination of estimative and predictive criteria which is in line with recent research in this field (Zhu, 2002, U. Chicago thesis). 40
BAYESIAN KRIGING AND BAYESIAN NETWORK DESIGN
 BAYESIAN KRIGING AND BAYESIAN NETWORK DESIGN Richard L. Smith Department of Statistics and Operations Research University of North Carolina Chapel Hill, N.C., U.S.A. J. Stuart Hunter Lecture TIES 2004
BAYESIAN KRIGING AND BAYESIAN NETWORK DESIGN Richard L. Smith Department of Statistics and Operations Research University of North Carolina Chapel Hill, N.C., U.S.A. J. Stuart Hunter Lecture TIES 2004
Asymptotic Multivariate Kriging Using Estimated Parameters with Bayesian Prediction Methods for Non-linear Predictands
 Asymptotic Multivariate Kriging Using Estimated Parameters with Bayesian Prediction Methods for Non-linear Predictands Elizabeth C. Mannshardt-Shamseldin Advisor: Richard L. Smith Duke University Department
Asymptotic Multivariate Kriging Using Estimated Parameters with Bayesian Prediction Methods for Non-linear Predictands Elizabeth C. Mannshardt-Shamseldin Advisor: Richard L. Smith Duke University Department
ASYMPTOTIC THEORY FOR KRIGING WITH ESTIMATED PARAMETERS AND ITS APPLICATION TO NETWORK DESIGN
 ASYMPTOTIC THEORY FOR KRIGING WITH ESTIMATED PARAMETERS AND ITS APPLICATION TO NETWORK DESIGN Richard L. Smith Department of Statistics and Operations Research University of North Carolina Chapel Hill,
ASYMPTOTIC THEORY FOR KRIGING WITH ESTIMATED PARAMETERS AND ITS APPLICATION TO NETWORK DESIGN Richard L. Smith Department of Statistics and Operations Research University of North Carolina Chapel Hill,
Introduction to Geostatistics
 Introduction to Geostatistics Abhi Datta 1, Sudipto Banerjee 2 and Andrew O. Finley 3 July 31, 2017 1 Department of Biostatistics, Bloomberg School of Public Health, Johns Hopkins University, Baltimore,
Introduction to Geostatistics Abhi Datta 1, Sudipto Banerjee 2 and Andrew O. Finley 3 July 31, 2017 1 Department of Biostatistics, Bloomberg School of Public Health, Johns Hopkins University, Baltimore,
Lognormal Measurement Error in Air Pollution Health Effect Studies
 Lognormal Measurement Error in Air Pollution Health Effect Studies Richard L. Smith Department of Statistics and Operations Research University of North Carolina, Chapel Hill rls@email.unc.edu Presentation
Lognormal Measurement Error in Air Pollution Health Effect Studies Richard L. Smith Department of Statistics and Operations Research University of North Carolina, Chapel Hill rls@email.unc.edu Presentation
Point-Referenced Data Models
 Point-Referenced Data Models Jamie Monogan University of Georgia Spring 2013 Jamie Monogan (UGA) Point-Referenced Data Models Spring 2013 1 / 19 Objectives By the end of these meetings, participants should
Point-Referenced Data Models Jamie Monogan University of Georgia Spring 2013 Jamie Monogan (UGA) Point-Referenced Data Models Spring 2013 1 / 19 Objectives By the end of these meetings, participants should
STATISTICAL MODELS FOR QUANTIFYING THE SPATIAL DISTRIBUTION OF SEASONALLY DERIVED OZONE STANDARDS
 STATISTICAL MODELS FOR QUANTIFYING THE SPATIAL DISTRIBUTION OF SEASONALLY DERIVED OZONE STANDARDS Eric Gilleland Douglas Nychka Geophysical Statistics Project National Center for Atmospheric Research Supported
STATISTICAL MODELS FOR QUANTIFYING THE SPATIAL DISTRIBUTION OF SEASONALLY DERIVED OZONE STANDARDS Eric Gilleland Douglas Nychka Geophysical Statistics Project National Center for Atmospheric Research Supported
Basics of Point-Referenced Data Models
 Basics of Point-Referenced Data Models Basic tool is a spatial process, {Y (s), s D}, where D R r Chapter 2: Basics of Point-Referenced Data Models p. 1/45 Basics of Point-Referenced Data Models Basic
Basics of Point-Referenced Data Models Basic tool is a spatial process, {Y (s), s D}, where D R r Chapter 2: Basics of Point-Referenced Data Models p. 1/45 Basics of Point-Referenced Data Models Basic
Models for spatial data (cont d) Types of spatial data. Types of spatial data (cont d) Hierarchical models for spatial data
 Types of spatial data. Types of spatial data (cont d) Hierarchical models for spatial data") Hierarchical models for spatial data Based on the book by Banerjee, Carlin and Gelfand Hierarchical Modeling and Analysis for Spatial Data, 2004. We focus on Chapters 1, 2 and 5. Geo-referenced data arise
Hierarchical models for spatial data Based on the book by Banerjee, Carlin and Gelfand Hierarchical Modeling and Analysis for Spatial Data, 2004. We focus on Chapters 1, 2 and 5. Geo-referenced data arise
Statistics for analyzing and modeling precipitation isotope ratios in IsoMAP
 Statistics for analyzing and modeling precipitation isotope ratios in IsoMAP The IsoMAP uses the multiple linear regression and geostatistical methods to analyze isotope data Suppose the response variable
Statistics for analyzing and modeling precipitation isotope ratios in IsoMAP The IsoMAP uses the multiple linear regression and geostatistical methods to analyze isotope data Suppose the response variable
Spatial statistics, addition to Part I. Parameter estimation and kriging for Gaussian random fields
 Spatial statistics, addition to Part I. Parameter estimation and kriging for Gaussian random fields 1 Introduction Jo Eidsvik Department of Mathematical Sciences, NTNU, Norway. (joeid@math.ntnu.no) February
Spatial statistics, addition to Part I. Parameter estimation and kriging for Gaussian random fields 1 Introduction Jo Eidsvik Department of Mathematical Sciences, NTNU, Norway. (joeid@math.ntnu.no) February
STATISTICS 174: APPLIED STATISTICS FINAL EXAM DECEMBER 10, 2002
 Time allowed: 3 HOURS. STATISTICS 174: APPLIED STATISTICS FINAL EXAM DECEMBER 10, 2002 This is an open book exam: all course notes and the text are allowed, and you are expected to use your own calculator.
Time allowed: 3 HOURS. STATISTICS 174: APPLIED STATISTICS FINAL EXAM DECEMBER 10, 2002 This is an open book exam: all course notes and the text are allowed, and you are expected to use your own calculator.
CBMS Lecture 1. Alan E. Gelfand Duke University
 CBMS Lecture 1 Alan E. Gelfand Duke University Introduction to spatial data and models Researchers in diverse areas such as climatology, ecology, environmental exposure, public health, and real estate
CBMS Lecture 1 Alan E. Gelfand Duke University Introduction to spatial data and models Researchers in diverse areas such as climatology, ecology, environmental exposure, public health, and real estate
of the 7 stations. In case the number of daily ozone maxima in a month is less than 15, the corresponding monthly mean was not computed, being treated
 Spatial Trends and Spatial Extremes in South Korean Ozone Seokhoon Yun University of Suwon, Department of Applied Statistics Suwon, Kyonggi-do 445-74 South Korea syun@mail.suwon.ac.kr Richard L. Smith
Spatial Trends and Spatial Extremes in South Korean Ozone Seokhoon Yun University of Suwon, Department of Applied Statistics Suwon, Kyonggi-do 445-74 South Korea syun@mail.suwon.ac.kr Richard L. Smith
Statistical Models for Monitoring and Regulating Ground-level Ozone. Abstract
 Statistical Models for Monitoring and Regulating Ground-level Ozone Eric Gilleland 1 and Douglas Nychka 2 Abstract The application of statistical techniques to environmental problems often involves a tradeoff
Statistical Models for Monitoring and Regulating Ground-level Ozone Eric Gilleland 1 and Douglas Nychka 2 Abstract The application of statistical techniques to environmental problems often involves a tradeoff
Covariance function estimation in Gaussian process regression
 Covariance function estimation in Gaussian process regression François Bachoc Department of Statistics and Operations Research, University of Vienna WU Research Seminar - May 2015 François Bachoc Gaussian
Covariance function estimation in Gaussian process regression François Bachoc Department of Statistics and Operations Research, University of Vienna WU Research Seminar - May 2015 François Bachoc Gaussian
σ(a) = a N (x; 0, 1 2 ) dx. σ(a) = Φ(a) =
 = a N (x; 0, 1 2 ) dx. σ(a) = Φ(a) =") Until now we have always worked with likelihoods and prior distributions that were conjugate to each other, allowing the computation of the posterior distribution to be done in closed form. Unfortunately,
Until now we have always worked with likelihoods and prior distributions that were conjugate to each other, allowing the computation of the posterior distribution to be done in closed form. Unfortunately,
Chapter 4 - Fundamentals of spatial processes Lecture notes
 Chapter 4 - Fundamentals of spatial processes Lecture notes Geir Storvik January 21, 2013 STK4150 - Intro 2 Spatial processes Typically correlation between nearby sites Mostly positive correlation Negative
Chapter 4 - Fundamentals of spatial processes Lecture notes Geir Storvik January 21, 2013 STK4150 - Intro 2 Spatial processes Typically correlation between nearby sites Mostly positive correlation Negative
Chapter 4 - Fundamentals of spatial processes Lecture notes
 TK4150 - Intro 1 Chapter 4 - Fundamentals of spatial processes Lecture notes Odd Kolbjørnsen and Geir Storvik January 30, 2017 STK4150 - Intro 2 Spatial processes Typically correlation between nearby sites
TK4150 - Intro 1 Chapter 4 - Fundamentals of spatial processes Lecture notes Odd Kolbjørnsen and Geir Storvik January 30, 2017 STK4150 - Intro 2 Spatial processes Typically correlation between nearby sites
Practicum : Spatial Regression
 : Alexandra M. Schmidt Instituto de Matemática UFRJ - www.dme.ufrj.br/ alex 2014 Búzios, RJ, www.dme.ufrj.br Exploratory (Spatial) Data Analysis 1. Non-spatial summaries Numerical summaries: Mean, median,
: Alexandra M. Schmidt Instituto de Matemática UFRJ - www.dme.ufrj.br/ alex 2014 Búzios, RJ, www.dme.ufrj.br Exploratory (Spatial) Data Analysis 1. Non-spatial summaries Numerical summaries: Mean, median,
Spatial Statistics with Image Analysis. Lecture L02. Computer exercise 0 Daily Temperature. Lecture 2. Johan Lindström.
 C Stochastic fields Covariance Spatial Statistics with Image Analysis Lecture 2 Johan Lindström November 4, 26 Lecture L2 Johan Lindström - johanl@maths.lth.se FMSN2/MASM2 L /2 C Stochastic fields Covariance
C Stochastic fields Covariance Spatial Statistics with Image Analysis Lecture 2 Johan Lindström November 4, 26 Lecture L2 Johan Lindström - johanl@maths.lth.se FMSN2/MASM2 L /2 C Stochastic fields Covariance
MA 575 Linear Models: Cedric E. Ginestet, Boston University Midterm Review Week 7
 MA 575 Linear Models: Cedric E. Ginestet, Boston University Midterm Review Week 7 1 Random Vectors Let a 0 and y be n 1 vectors, and let A be an n n matrix. Here, a 0 and A are non-random, whereas y is
MA 575 Linear Models: Cedric E. Ginestet, Boston University Midterm Review Week 7 1 Random Vectors Let a 0 and y be n 1 vectors, and let A be an n n matrix. Here, a 0 and A are non-random, whereas y is
Hierarchical Modeling for Univariate Spatial Data
 Hierarchical Modeling for Univariate Spatial Data Geography 890, Hierarchical Bayesian Models for Environmental Spatial Data Analysis February 15, 2011 1 Spatial Domain 2 Geography 890 Spatial Domain This
Hierarchical Modeling for Univariate Spatial Data Geography 890, Hierarchical Bayesian Models for Environmental Spatial Data Analysis February 15, 2011 1 Spatial Domain 2 Geography 890 Spatial Domain This
Statistícal Methods for Spatial Data Analysis
 Texts in Statistícal Science Statistícal Methods for Spatial Data Analysis V- Oliver Schabenberger Carol A. Gotway PCT CHAPMAN & K Contents Preface xv 1 Introduction 1 1.1 The Need for Spatial Analysis
Texts in Statistícal Science Statistícal Methods for Spatial Data Analysis V- Oliver Schabenberger Carol A. Gotway PCT CHAPMAN & K Contents Preface xv 1 Introduction 1 1.1 The Need for Spatial Analysis
Model Selection for Geostatistical Models
 Model Selection for Geostatistical Models Richard A. Davis Colorado State University http://www.stat.colostate.edu/~rdavis/lectures Joint work with: Jennifer A. Hoeting, Colorado State University Andrew
Model Selection for Geostatistical Models Richard A. Davis Colorado State University http://www.stat.colostate.edu/~rdavis/lectures Joint work with: Jennifer A. Hoeting, Colorado State University Andrew
Gaussian Processes. Le Song. Machine Learning II: Advanced Topics CSE 8803ML, Spring 2012
 Gaussian Processes Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 01 Pictorial view of embedding distribution Transform the entire distribution to expected features Feature space Feature
Gaussian Processes Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 01 Pictorial view of embedding distribution Transform the entire distribution to expected features Feature space Feature
What s for today. Introduction to Space-time models. c Mikyoung Jun (Texas A&M) Stat647 Lecture 14 October 16, / 19
 Stat647 Lecture 14 October 16, / 19") What s for today Introduction to Space-time models c Mikyoung Jun (Texas A&M) Stat647 Lecture 14 October 16, 2012 1 / 19 Space-time Data So far we looked at the data that vary over space Now we add another
What s for today Introduction to Space-time models c Mikyoung Jun (Texas A&M) Stat647 Lecture 14 October 16, 2012 1 / 19 Space-time Data So far we looked at the data that vary over space Now we add another
Comparing Non-informative Priors for Estimation and Prediction in Spatial Models
 Environmentrics 00, 1 12 DOI: 10.1002/env.XXXX Comparing Non-informative Priors for Estimation and Prediction in Spatial Models Regina Wu a and Cari G. Kaufman a Summary: Fitting a Bayesian model to spatial
Environmentrics 00, 1 12 DOI: 10.1002/env.XXXX Comparing Non-informative Priors for Estimation and Prediction in Spatial Models Regina Wu a and Cari G. Kaufman a Summary: Fitting a Bayesian model to spatial
MS&E 226: Small Data. Lecture 11: Maximum likelihood (v2) Ramesh Johari
 Ramesh Johari") MS&E 226: Small Data Lecture 11: Maximum likelihood (v2) Ramesh Johari ramesh.johari@stanford.edu 1 / 18 The likelihood function 2 / 18 Estimating the parameter This lecture develops the methodology behind
MS&E 226: Small Data Lecture 11: Maximum likelihood (v2) Ramesh Johari ramesh.johari@stanford.edu 1 / 18 The likelihood function 2 / 18 Estimating the parameter This lecture develops the methodology behind
MA 575 Linear Models: Cedric E. Ginestet, Boston University Mixed Effects Estimation, Residuals Diagnostics Week 11, Lecture 1
 MA 575 Linear Models: Cedric E Ginestet, Boston University Mixed Effects Estimation, Residuals Diagnostics Week 11, Lecture 1 1 Within-group Correlation Let us recall the simple two-level hierarchical
MA 575 Linear Models: Cedric E Ginestet, Boston University Mixed Effects Estimation, Residuals Diagnostics Week 11, Lecture 1 1 Within-group Correlation Let us recall the simple two-level hierarchical
REGRESSION WITH SPATIALLY MISALIGNED DATA. Lisa Madsen Oregon State University David Ruppert Cornell University
 REGRESSION ITH SPATIALL MISALIGNED DATA Lisa Madsen Oregon State University David Ruppert Cornell University SPATIALL MISALIGNED DATA 10 X X X X X X X X 5 X X X X X 0 X 0 5 10 OUTLINE 1. Introduction 2.
REGRESSION ITH SPATIALL MISALIGNED DATA Lisa Madsen Oregon State University David Ruppert Cornell University SPATIALL MISALIGNED DATA 10 X X X X X X X X 5 X X X X X 0 X 0 5 10 OUTLINE 1. Introduction 2.
RISK AND EXTREMES: ASSESSING THE PROBABILITIES OF VERY RARE EVENTS
 RISK AND EXTREMES: ASSESSING THE PROBABILITIES OF VERY RARE EVENTS Richard L. Smith Department of Statistics and Operations Research University of North Carolina Chapel Hill, NC 27599-3260 rls@email.unc.edu
RISK AND EXTREMES: ASSESSING THE PROBABILITIES OF VERY RARE EVENTS Richard L. Smith Department of Statistics and Operations Research University of North Carolina Chapel Hill, NC 27599-3260 rls@email.unc.edu
Bayesian spatial quantile regression
 Brian J. Reich and Montserrat Fuentes North Carolina State University and David B. Dunson Duke University E-mail:reich@stat.ncsu.edu Tropospheric ozone Tropospheric ozone has been linked with several adverse
Brian J. Reich and Montserrat Fuentes North Carolina State University and David B. Dunson Duke University E-mail:reich@stat.ncsu.edu Tropospheric ozone Tropospheric ozone has been linked with several adverse
Introduction to Spatial Data and Models
 Introduction to Spatial Data and Models Sudipto Banerjee 1 and Andrew O. Finley 2 1 Biostatistics, School of Public Health, University of Minnesota, Minneapolis, Minnesota, U.S.A. 2 Department of Forestry
Introduction to Spatial Data and Models Sudipto Banerjee 1 and Andrew O. Finley 2 1 Biostatistics, School of Public Health, University of Minnesota, Minneapolis, Minnesota, U.S.A. 2 Department of Forestry
Likelihood and p-value functions in the composite likelihood context
 Likelihood and p-value functions in the composite likelihood context D.A.S. Fraser and N. Reid Department of Statistical Sciences University of Toronto November 19, 2016 Abstract The need for combining
Likelihood and p-value functions in the composite likelihood context D.A.S. Fraser and N. Reid Department of Statistical Sciences University of Toronto November 19, 2016 Abstract The need for combining
Bayesian Transgaussian Kriging
 1 Bayesian Transgaussian Kriging Hannes Müller Institut für Statistik University of Klagenfurt 9020 Austria Keywords: Kriging, Bayesian statistics AMS: 62H11,60G90 Abstract In geostatistics a widely used
1 Bayesian Transgaussian Kriging Hannes Müller Institut für Statistik University of Klagenfurt 9020 Austria Keywords: Kriging, Bayesian statistics AMS: 62H11,60G90 Abstract In geostatistics a widely used
Introduction to Spatial Data and Models
 Introduction to Spatial Data and Models Sudipto Banerjee 1 and Andrew O. Finley 2 1 Department of Forestry & Department of Geography, Michigan State University, Lansing Michigan, U.S.A. 2 Biostatistics,
Introduction to Spatial Data and Models Sudipto Banerjee 1 and Andrew O. Finley 2 1 Department of Forestry & Department of Geography, Michigan State University, Lansing Michigan, U.S.A. 2 Biostatistics,
Bayesian and Frequentist Methods for Approximate Inference in Generalized Linear Mixed Models
 Bayesian and Frequentist Methods for Approximate Inference in Generalized Linear Mixed Models Evangelos A. Evangelou A dissertation submitted to the faculty of the University of North Carolina at Chapel
Bayesian and Frequentist Methods for Approximate Inference in Generalized Linear Mixed Models Evangelos A. Evangelou A dissertation submitted to the faculty of the University of North Carolina at Chapel
Now consider the case where E(Y) = µ = Xβ and V (Y) = σ 2 G, where G is diagonal, but unknown.
 = µ = Xβ and V (Y) = σ 2 G, where G is diagonal, but unknown.") Weighting We have seen that if E(Y) = Xβ and V (Y) = σ 2 G, where G is known, the model can be rewritten as a linear model. This is known as generalized least squares or, if G is diagonal, with trace(g)
Weighting We have seen that if E(Y) = Xβ and V (Y) = σ 2 G, where G is known, the model can be rewritten as a linear model. This is known as generalized least squares or, if G is diagonal, with trace(g)
Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes
 Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes Alan Gelfand 1 and Andrew O. Finley 2 1 Department of Statistical Science, Duke University, Durham, North
Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes Alan Gelfand 1 and Andrew O. Finley 2 1 Department of Statistical Science, Duke University, Durham, North
Limit Kriging. Abstract
 Limit Kriging V. Roshan Joseph School of Industrial and Systems Engineering Georgia Institute of Technology Atlanta, GA 30332-0205, USA roshan@isye.gatech.edu Abstract A new kriging predictor is proposed.
Limit Kriging V. Roshan Joseph School of Industrial and Systems Engineering Georgia Institute of Technology Atlanta, GA 30332-0205, USA roshan@isye.gatech.edu Abstract A new kriging predictor is proposed.
Spatio-temporal prediction of site index based on forest inventories and climate change scenarios
 Forest Research Institute Spatio-temporal prediction of site index based on forest inventories and climate change scenarios Arne Nothdurft 1, Thilo Wolf 1, Andre Ringeler 2, Jürgen Böhner 2, Joachim Saborowski
Forest Research Institute Spatio-temporal prediction of site index based on forest inventories and climate change scenarios Arne Nothdurft 1, Thilo Wolf 1, Andre Ringeler 2, Jürgen Böhner 2, Joachim Saborowski
FREQUENTIST BEHAVIOR OF FORMAL BAYESIAN INFERENCE
 FREQUENTIST BEHAVIOR OF FORMAL BAYESIAN INFERENCE Donald A. Pierce Oregon State Univ (Emeritus), RERF Hiroshima (Retired), Oregon Health Sciences Univ (Adjunct) Ruggero Bellio Univ of Udine For Perugia
FREQUENTIST BEHAVIOR OF FORMAL BAYESIAN INFERENCE Donald A. Pierce Oregon State Univ (Emeritus), RERF Hiroshima (Retired), Oregon Health Sciences Univ (Adjunct) Ruggero Bellio Univ of Udine For Perugia
Handbook of Spatial Statistics Chapter 2: Continuous Parameter Stochastic Process Theory by Gneiting and Guttorp
 Handbook of Spatial Statistics Chapter 2: Continuous Parameter Stochastic Process Theory by Gneiting and Guttorp Marcela Alfaro Córdoba August 25, 2016 NCSU Department of Statistics Continuous Parameter
Handbook of Spatial Statistics Chapter 2: Continuous Parameter Stochastic Process Theory by Gneiting and Guttorp Marcela Alfaro Córdoba August 25, 2016 NCSU Department of Statistics Continuous Parameter
Spatial smoothing using Gaussian processes
 Spatial smoothing using Gaussian processes Chris Paciorek paciorek@hsph.harvard.edu August 5, 2004 1 OUTLINE Spatial smoothing and Gaussian processes Covariance modelling Nonstationary covariance modelling
Spatial smoothing using Gaussian processes Chris Paciorek paciorek@hsph.harvard.edu August 5, 2004 1 OUTLINE Spatial smoothing and Gaussian processes Covariance modelling Nonstationary covariance modelling
Statistics & Data Sciences: First Year Prelim Exam May 2018
 Statistics & Data Sciences: First Year Prelim Exam May 2018 Instructions: 1. Do not turn this page until instructed to do so. 2. Start each new question on a new sheet of paper. 3. This is a closed book
Statistics & Data Sciences: First Year Prelim Exam May 2018 Instructions: 1. Do not turn this page until instructed to do so. 2. Start each new question on a new sheet of paper. 3. This is a closed book
Part III. A Decision-Theoretic Approach and Bayesian testing
 Part III A Decision-Theoretic Approach and Bayesian testing 1 Chapter 10 Bayesian Inference as a Decision Problem The decision-theoretic framework starts with the following situation. We would like to
Part III A Decision-Theoretic Approach and Bayesian testing 1 Chapter 10 Bayesian Inference as a Decision Problem The decision-theoretic framework starts with the following situation. We would like to
STATISTICAL INTERPOLATION METHODS RICHARD SMITH AND NOEL CRESSIE Statistical methods of interpolation are all based on assuming that the process
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 STATISTICAL INTERPOLATION METHODS
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 STATISTICAL INTERPOLATION METHODS
Integrated Likelihood Estimation in Semiparametric Regression Models. Thomas A. Severini Department of Statistics Northwestern University
 Integrated Likelihood Estimation in Semiparametric Regression Models Thomas A. Severini Department of Statistics Northwestern University Joint work with Heping He, University of York Introduction Let Y
Integrated Likelihood Estimation in Semiparametric Regression Models Thomas A. Severini Department of Statistics Northwestern University Joint work with Heping He, University of York Introduction Let Y
Statistics 203: Introduction to Regression and Analysis of Variance Course review
 Statistics 203: Introduction to Regression and Analysis of Variance Course review Jonathan Taylor - p. 1/?? Today Review / overview of what we learned. - p. 2/?? General themes in regression models Specifying
Statistics 203: Introduction to Regression and Analysis of Variance Course review Jonathan Taylor - p. 1/?? Today Review / overview of what we learned. - p. 2/?? General themes in regression models Specifying
REML Estimation and Linear Mixed Models 4. Geostatistics and linear mixed models for spatial data
 REML Estimation and Linear Mixed Models 4. Geostatistics and linear mixed models for spatial data Sue Welham Rothamsted Research Harpenden UK AL5 2JQ December 1, 2008 1 We will start by reviewing the principles
REML Estimation and Linear Mixed Models 4. Geostatistics and linear mixed models for spatial data Sue Welham Rothamsted Research Harpenden UK AL5 2JQ December 1, 2008 1 We will start by reviewing the principles
Multivariate spatial models and the multikrig class
 Multivariate spatial models and the multikrig class Stephan R Sain, IMAGe, NCAR ENAR Spring Meetings March 15, 2009 Outline Overview of multivariate spatial regression models Case study: pedotransfer functions
Multivariate spatial models and the multikrig class Stephan R Sain, IMAGe, NCAR ENAR Spring Meetings March 15, 2009 Outline Overview of multivariate spatial regression models Case study: pedotransfer functions
Default priors and model parametrization
 1 / 16 Default priors and model parametrization Nancy Reid O-Bayes09, June 6, 2009 Don Fraser, Elisabeta Marras, Grace Yun-Yi 2 / 16 Well-calibrated priors model f (y; θ), F(y; θ); log-likelihood l(θ)
1 / 16 Default priors and model parametrization Nancy Reid O-Bayes09, June 6, 2009 Don Fraser, Elisabeta Marras, Grace Yun-Yi 2 / 16 Well-calibrated priors model f (y; θ), F(y; θ); log-likelihood l(θ)
Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes
 Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes Andrew O. Finley 1 and Sudipto Banerjee 2 1 Department of Forestry & Department of Geography, Michigan
Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes Andrew O. Finley 1 and Sudipto Banerjee 2 1 Department of Forestry & Department of Geography, Michigan
Comparing Non-informative Priors for Estimation and. Prediction in Spatial Models
 Comparing Non-informative Priors for Estimation and Prediction in Spatial Models Vigre Semester Report by: Regina Wu Advisor: Cari Kaufman January 31, 2010 1 Introduction Gaussian random fields with specified
Comparing Non-informative Priors for Estimation and Prediction in Spatial Models Vigre Semester Report by: Regina Wu Advisor: Cari Kaufman January 31, 2010 1 Introduction Gaussian random fields with specified
Hierarchical Modelling for Univariate Spatial Data
 Hierarchical Modelling for Univariate Spatial Data Sudipto Banerjee 1 and Andrew O. Finley 2 1 Biostatistics, School of Public Health, University of Minnesota, Minneapolis, Minnesota, U.S.A. 2 Department
Hierarchical Modelling for Univariate Spatial Data Sudipto Banerjee 1 and Andrew O. Finley 2 1 Biostatistics, School of Public Health, University of Minnesota, Minneapolis, Minnesota, U.S.A. 2 Department
Linear Methods for Prediction
 Chapter 5 Linear Methods for Prediction 5.1 Introduction We now revisit the classification problem and focus on linear methods. Since our prediction Ĝ(x) will always take values in the discrete set G we
Chapter 5 Linear Methods for Prediction 5.1 Introduction We now revisit the classification problem and focus on linear methods. Since our prediction Ĝ(x) will always take values in the discrete set G we
Association studies and regression
 Association studies and regression CM226: Machine Learning for Bioinformatics. Fall 2016 Sriram Sankararaman Acknowledgments: Fei Sha, Ameet Talwalkar Association studies and regression 1 / 104 Administration
Association studies and regression CM226: Machine Learning for Bioinformatics. Fall 2016 Sriram Sankararaman Acknowledgments: Fei Sha, Ameet Talwalkar Association studies and regression 1 / 104 Administration
For more information about how to cite these materials visit
 Author(s): Kerby Shedden, Ph.D., 2010 License: Unless otherwise noted, this material is made available under the terms of the Creative Commons Attribution Share Alike 3.0 License: http://creativecommons.org/licenses/by-sa/3.0/
Author(s): Kerby Shedden, Ph.D., 2010 License: Unless otherwise noted, this material is made available under the terms of the Creative Commons Attribution Share Alike 3.0 License: http://creativecommons.org/licenses/by-sa/3.0/
ST 740: Linear Models and Multivariate Normal Inference
 ST 740: Linear Models and Multivariate Normal Inference Alyson Wilson Department of Statistics North Carolina State University November 4, 2013 A. Wilson (NCSU STAT) Linear Models November 4, 2013 1 /
ST 740: Linear Models and Multivariate Normal Inference Alyson Wilson Department of Statistics North Carolina State University November 4, 2013 A. Wilson (NCSU STAT) Linear Models November 4, 2013 1 /
Nonlinear Kriging, potentialities and drawbacks
 Nonlinear Kriging, potentialities and drawbacks K. G. van den Boogaart TU Bergakademie Freiberg, Germany; boogaart@grad.tu-freiberg.de Motivation Kriging is known to be the best linear prediction to conclude
Nonlinear Kriging, potentialities and drawbacks K. G. van den Boogaart TU Bergakademie Freiberg, Germany; boogaart@grad.tu-freiberg.de Motivation Kriging is known to be the best linear prediction to conclude
Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes
 Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes Sudipto Banerjee 1 and Andrew O. Finley 2 1 Biostatistics, School of Public Health, University of Minnesota,
Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes Sudipto Banerjee 1 and Andrew O. Finley 2 1 Biostatistics, School of Public Health, University of Minnesota,
On the Behavior of Marginal and Conditional Akaike Information Criteria in Linear Mixed Models
 On the Behavior of Marginal and Conditional Akaike Information Criteria in Linear Mixed Models Thomas Kneib Department of Mathematics Carl von Ossietzky University Oldenburg Sonja Greven Department of
On the Behavior of Marginal and Conditional Akaike Information Criteria in Linear Mixed Models Thomas Kneib Department of Mathematics Carl von Ossietzky University Oldenburg Sonja Greven Department of
Stat 5101 Lecture Notes
 Stat 5101 Lecture Notes Charles J. Geyer Copyright 1998, 1999, 2000, 2001 by Charles J. Geyer May 7, 2001 ii Stat 5101 (Geyer) Course Notes Contents 1 Random Variables and Change of Variables 1 1.1 Random
Stat 5101 Lecture Notes Charles J. Geyer Copyright 1998, 1999, 2000, 2001 by Charles J. Geyer May 7, 2001 ii Stat 5101 (Geyer) Course Notes Contents 1 Random Variables and Change of Variables 1 1.1 Random
I don t have much to say here: data are often sampled this way but we more typically model them in continuous space, or on a graph
 Spatial analysis Huge topic! Key references Diggle (point patterns); Cressie (everything); Diggle and Ribeiro (geostatistics); Dormann et al (GLMMs for species presence/abundance); Haining; (Pinheiro and
Spatial analysis Huge topic! Key references Diggle (point patterns); Cressie (everything); Diggle and Ribeiro (geostatistics); Dormann et al (GLMMs for species presence/abundance); Haining; (Pinheiro and
arxiv: v1 [stat.me] 24 May 2010
![arxiv: v1 [stat.me] 24 May 2010](/thumbs/92/110628453.jpg "arxiv: v1 [stat.me] 24 May 2010") The role of the nugget term in the Gaussian process method Andrey Pepelyshev arxiv:1005.4385v1 [stat.me] 24 May 2010 Abstract The maximum likelihood estimate of the correlation parameter of a Gaussian
The role of the nugget term in the Gaussian process method Andrey Pepelyshev arxiv:1005.4385v1 [stat.me] 24 May 2010 Abstract The maximum likelihood estimate of the correlation parameter of a Gaussian
Geostatistical Modeling for Large Data Sets: Low-rank methods
 Geostatistical Modeling for Large Data Sets: Low-rank methods Whitney Huang, Kelly-Ann Dixon Hamil, and Zizhuang Wu Department of Statistics Purdue University February 22, 2016 Outline Motivation Low-rank
Geostatistical Modeling for Large Data Sets: Low-rank methods Whitney Huang, Kelly-Ann Dixon Hamil, and Zizhuang Wu Department of Statistics Purdue University February 22, 2016 Outline Motivation Low-rank
Regression. Oscar García
 Regression Oscar García Regression methods are fundamental in Forest Mensuration For a more concise and general presentation, we shall first review some matrix concepts 1 Matrices An order n m matrix is
Regression Oscar García Regression methods are fundamental in Forest Mensuration For a more concise and general presentation, we shall first review some matrix concepts 1 Matrices An order n m matrix is
MISCELLANEOUS TOPICS RELATED TO LIKELIHOOD. Copyright c 2012 (Iowa State University) Statistics / 30
 Statistics / 30") MISCELLANEOUS TOPICS RELATED TO LIKELIHOOD Copyright c 2012 (Iowa State University) Statistics 511 1 / 30 INFORMATION CRITERIA Akaike s Information criterion is given by AIC = 2l(ˆθ) + 2k, where l(ˆθ)
MISCELLANEOUS TOPICS RELATED TO LIKELIHOOD Copyright c 2012 (Iowa State University) Statistics 511 1 / 30 INFORMATION CRITERIA Akaike s Information criterion is given by AIC = 2l(ˆθ) + 2k, where l(ˆθ)
The linear model is the most fundamental of all serious statistical models encompassing:
 Linear Regression Models: A Bayesian perspective Ingredients of a linear model include an n 1 response vector y = (y 1,..., y n ) T and an n p design matrix (e.g. including regressors) X = [x 1,..., x
Linear Regression Models: A Bayesian perspective Ingredients of a linear model include an n 1 response vector y = (y 1,..., y n ) T and an n p design matrix (e.g. including regressors) X = [x 1,..., x
Bayesian Linear Models
 Bayesian Linear Models Sudipto Banerjee 1 and Andrew O. Finley 2 1 Biostatistics, School of Public Health, University of Minnesota, Minneapolis, Minnesota, U.S.A. 2 Department of Forestry & Department
Bayesian Linear Models Sudipto Banerjee 1 and Andrew O. Finley 2 1 Biostatistics, School of Public Health, University of Minnesota, Minneapolis, Minnesota, U.S.A. 2 Department of Forestry & Department
Hierarchical Modeling for Multivariate Spatial Data
 Hierarchical Modeling for Multivariate Spatial Data Sudipto Banerjee 1 and Andrew O. Finley 2 1 Biostatistics, School of Public Health, University of Minnesota, Minneapolis, Minnesota, U.S.A. 2 Department
Hierarchical Modeling for Multivariate Spatial Data Sudipto Banerjee 1 and Andrew O. Finley 2 1 Biostatistics, School of Public Health, University of Minnesota, Minneapolis, Minnesota, U.S.A. 2 Department
E(x i ) = µ i. 2 d. + sin 1 d θ 2. for d < θ 2 0 for d θ 2
 = µ i. 2 d. + sin 1 d θ 2. for d < θ 2 0 for d θ 2") 1 Gaussian Processes Definition 1.1 A Gaussian process { i } over sites i is defined by its mean function and its covariance function E( i ) = µ i c ij = Cov( i, j ) plus joint normality of the finite
1 Gaussian Processes Definition 1.1 A Gaussian process { i } over sites i is defined by its mean function and its covariance function E( i ) = µ i c ij = Cov( i, j ) plus joint normality of the finite
On the Behavior of Marginal and Conditional Akaike Information Criteria in Linear Mixed Models
 On the Behavior of Marginal and Conditional Akaike Information Criteria in Linear Mixed Models Thomas Kneib Institute of Statistics and Econometrics Georg-August-University Göttingen Department of Statistics
On the Behavior of Marginal and Conditional Akaike Information Criteria in Linear Mixed Models Thomas Kneib Institute of Statistics and Econometrics Georg-August-University Göttingen Department of Statistics
The ProbForecastGOP Package
 The ProbForecastGOP Package April 24, 2006 Title Probabilistic Weather Field Forecast using the GOP method Version 1.3 Author Yulia Gel, Adrian E. Raftery, Tilmann Gneiting, Veronica J. Berrocal Description
The ProbForecastGOP Package April 24, 2006 Title Probabilistic Weather Field Forecast using the GOP method Version 1.3 Author Yulia Gel, Adrian E. Raftery, Tilmann Gneiting, Veronica J. Berrocal Description
Approximate Likelihoods
 Approximate Likelihoods Nancy Reid July 28, 2015 Why likelihood? makes probability modelling central l(θ; y) = log f (y; θ) emphasizes the inverse problem of reasoning y θ converts a prior probability
Approximate Likelihoods Nancy Reid July 28, 2015 Why likelihood? makes probability modelling central l(θ; y) = log f (y; θ) emphasizes the inverse problem of reasoning y θ converts a prior probability
Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes
 Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes Andrew O. Finley Department of Forestry & Department of Geography, Michigan State University, Lansing
Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes Andrew O. Finley Department of Forestry & Department of Geography, Michigan State University, Lansing
Modeling and Interpolation of Non-Gaussian Spatial Data: A Comparative Study
 Modeling and Interpolation of Non-Gaussian Spatial Data: A Comparative Study Gunter Spöck, Hannes Kazianka, Jürgen Pilz Department of Statistics, University of Klagenfurt, Austria hannes.kazianka@uni-klu.ac.at
Modeling and Interpolation of Non-Gaussian Spatial Data: A Comparative Study Gunter Spöck, Hannes Kazianka, Jürgen Pilz Department of Statistics, University of Klagenfurt, Austria hannes.kazianka@uni-klu.ac.at
Bayesian Thinking in Spatial Statistics
 Bayesian Thinking in Spatial Statistics Lance A. Waller Department of Biostatistics Rollins School of Public Health Emory University 1518 Clifton Road NE Atlanta, GA 30322 E-mail: lwaller@sph.emory.edu
Bayesian Thinking in Spatial Statistics Lance A. Waller Department of Biostatistics Rollins School of Public Health Emory University 1518 Clifton Road NE Atlanta, GA 30322 E-mail: lwaller@sph.emory.edu
Bayesian Linear Models
 Bayesian Linear Models Sudipto Banerjee 1 and Andrew O. Finley 2 1 Department of Forestry & Department of Geography, Michigan State University, Lansing Michigan, U.S.A. 2 Biostatistics, School of Public
Bayesian Linear Models Sudipto Banerjee 1 and Andrew O. Finley 2 1 Department of Forestry & Department of Geography, Michigan State University, Lansing Michigan, U.S.A. 2 Biostatistics, School of Public
Statement: With my signature I confirm that the solutions are the product of my own work. Name: Signature:.
 MATHEMATICAL STATISTICS Homework assignment Instructions Please turn in the homework with this cover page. You do not need to edit the solutions. Just make sure the handwriting is legible. You may discuss
MATHEMATICAL STATISTICS Homework assignment Instructions Please turn in the homework with this cover page. You do not need to edit the solutions. Just make sure the handwriting is legible. You may discuss
Karhunen-Loeve Expansion and Optimal Low-Rank Model for Spatial Processes
 TTU, October 26, 2012 p. 1/3 Karhunen-Loeve Expansion and Optimal Low-Rank Model for Spatial Processes Hao Zhang Department of Statistics Department of Forestry and Natural Resources Purdue University
TTU, October 26, 2012 p. 1/3 Karhunen-Loeve Expansion and Optimal Low-Rank Model for Spatial Processes Hao Zhang Department of Statistics Department of Forestry and Natural Resources Purdue University
Modeling Real Estate Data using Quantile Regression
 Modeling Real Estate Data using Semiparametric Quantile Regression Department of Statistics University of Innsbruck September 9th, 2011 Overview 1 Application: 2 3 4 Hedonic regression data for house prices
Modeling Real Estate Data using Semiparametric Quantile Regression Department of Statistics University of Innsbruck September 9th, 2011 Overview 1 Application: 2 3 4 Hedonic regression data for house prices
On the Behavior of Marginal and Conditional Akaike Information Criteria in Linear Mixed Models
 On the Behavior of Marginal and Conditional Akaike Information Criteria in Linear Mixed Models Thomas Kneib Department of Mathematics Carl von Ossietzky University Oldenburg Sonja Greven Department of
On the Behavior of Marginal and Conditional Akaike Information Criteria in Linear Mixed Models Thomas Kneib Department of Mathematics Carl von Ossietzky University Oldenburg Sonja Greven Department of
Hierarchical Modelling for Multivariate Spatial Data
 Hierarchical Modelling for Multivariate Spatial Data Geography 890, Hierarchical Bayesian Models for Environmental Spatial Data Analysis February 15, 2011 1 Point-referenced spatial data often come as
Hierarchical Modelling for Multivariate Spatial Data Geography 890, Hierarchical Bayesian Models for Environmental Spatial Data Analysis February 15, 2011 1 Point-referenced spatial data often come as
Kriging models with Gaussian processes - covariance function estimation and impact of spatial sampling
 Kriging models with Gaussian processes - covariance function estimation and impact of spatial sampling François Bachoc former PhD advisor: Josselin Garnier former CEA advisor: Jean-Marc Martinez Department
Kriging models with Gaussian processes - covariance function estimation and impact of spatial sampling François Bachoc former PhD advisor: Josselin Garnier former CEA advisor: Jean-Marc Martinez Department
Lecture 16 : Bayesian analysis of contingency tables. Bayesian linear regression. Jonathan Marchini (University of Oxford) BS2a MT / 15
 BS2a MT / 15") Lecture 16 : Bayesian analysis of contingency tables. Bayesian linear regression. Jonathan Marchini (University of Oxford) BS2a MT 2013 1 / 15 Contingency table analysis North Carolina State University
Lecture 16 : Bayesian analysis of contingency tables. Bayesian linear regression. Jonathan Marchini (University of Oxford) BS2a MT 2013 1 / 15 Contingency table analysis North Carolina State University
Bayesian inference for factor scores
 Bayesian inference for factor scores Murray Aitkin and Irit Aitkin School of Mathematics and Statistics University of Newcastle UK October, 3 Abstract Bayesian inference for the parameters of the factor
Bayesian inference for factor scores Murray Aitkin and Irit Aitkin School of Mathematics and Statistics University of Newcastle UK October, 3 Abstract Bayesian inference for the parameters of the factor
ABC random forest for parameter estimation. Jean-Michel Marin
 ABC random forest for parameter estimation Jean-Michel Marin Université de Montpellier Institut Montpelliérain Alexander Grothendieck (IMAG) Institut de Biologie Computationnelle (IBC) Labex Numev! joint
ABC random forest for parameter estimation Jean-Michel Marin Université de Montpellier Institut Montpelliérain Alexander Grothendieck (IMAG) Institut de Biologie Computationnelle (IBC) Labex Numev! joint
An Extended BIC for Model Selection
 An Extended BIC for Model Selection at the JSM meeting 2007 - Salt Lake City Surajit Ray Boston University (Dept of Mathematics and Statistics) Joint work with James Berger, Duke University; Susie Bayarri,
An Extended BIC for Model Selection at the JSM meeting 2007 - Salt Lake City Surajit Ray Boston University (Dept of Mathematics and Statistics) Joint work with James Berger, Duke University; Susie Bayarri,
Overall Objective Priors
 Overall Objective Priors Jim Berger, Jose Bernardo and Dongchu Sun Duke University, University of Valencia and University of Missouri Recent advances in statistical inference: theory and case studies University
Overall Objective Priors Jim Berger, Jose Bernardo and Dongchu Sun Duke University, University of Valencia and University of Missouri Recent advances in statistical inference: theory and case studies University
Measuring nuisance parameter effects in Bayesian inference
 Measuring nuisance parameter effects in Bayesian inference Alastair Young Imperial College London WHOA-PSI-2017 1 / 31 Acknowledgements: Tom DiCiccio, Cornell University; Daniel Garcia Rasines, Imperial
Measuring nuisance parameter effects in Bayesian inference Alastair Young Imperial College London WHOA-PSI-2017 1 / 31 Acknowledgements: Tom DiCiccio, Cornell University; Daniel Garcia Rasines, Imperial
Space-time data. Simple space-time analyses. PM10 in space. PM10 in time
 Space-time data Observations taken over space and over time Z(s, t): indexed by space, s, and time, t Here, consider geostatistical/time data Z(s, t) exists for all locations and all times May consider
Space-time data Observations taken over space and over time Z(s, t): indexed by space, s, and time, t Here, consider geostatistical/time data Z(s, t) exists for all locations and all times May consider
STAT 100C: Linear models
 STAT 100C: Linear models Arash A. Amini June 9, 2018 1 / 56 Table of Contents Multiple linear regression Linear model setup Estimation of β Geometric interpretation Estimation of σ 2 Hat matrix Gram matrix
STAT 100C: Linear models Arash A. Amini June 9, 2018 1 / 56 Table of Contents Multiple linear regression Linear model setup Estimation of β Geometric interpretation Estimation of σ 2 Hat matrix Gram matrix
F & B Approaches to a simple model
 A6523 Signal Modeling, Statistical Inference and Data Mining in Astrophysics Spring 215 http://www.astro.cornell.edu/~cordes/a6523 Lecture 11 Applications: Model comparison Challenges in large-scale surveys
A6523 Signal Modeling, Statistical Inference and Data Mining in Astrophysics Spring 215 http://www.astro.cornell.edu/~cordes/a6523 Lecture 11 Applications: Model comparison Challenges in large-scale surveys
MCMC algorithms for fitting Bayesian models
 MCMC algorithms for fitting Bayesian models p. 1/1 MCMC algorithms for fitting Bayesian models Sudipto Banerjee sudiptob@biostat.umn.edu University of Minnesota MCMC algorithms for fitting Bayesian models
MCMC algorithms for fitting Bayesian models p. 1/1 MCMC algorithms for fitting Bayesian models Sudipto Banerjee sudiptob@biostat.umn.edu University of Minnesota MCMC algorithms for fitting Bayesian models
Bayesian and frequentist inference
 Bayesian and frequentist inference Nancy Reid March 26, 2007 Don Fraser, Ana-Maria Staicu Overview Methods of inference Asymptotic theory Approximate posteriors matching priors Examples Logistic regression
Bayesian and frequentist inference Nancy Reid March 26, 2007 Don Fraser, Ana-Maria Staicu Overview Methods of inference Asymptotic theory Approximate posteriors matching priors Examples Logistic regression
Stat260: Bayesian Modeling and Inference Lecture Date: February 10th, Jeffreys priors. exp 1 ) p 2
 p 2") Stat260: Bayesian Modeling and Inference Lecture Date: February 10th, 2010 Jeffreys priors Lecturer: Michael I. Jordan Scribe: Timothy Hunter 1 Priors for the multivariate Gaussian Consider a multivariate
Stat260: Bayesian Modeling and Inference Lecture Date: February 10th, 2010 Jeffreys priors Lecturer: Michael I. Jordan Scribe: Timothy Hunter 1 Priors for the multivariate Gaussian Consider a multivariate
Empirical Bayes methods for the transformed Gaussian random field model with additive measurement errors
 1 Empirical Bayes methods for the transformed Gaussian random field model with additive measurement errors Vivekananda Roy Evangelos Evangelou Zhengyuan Zhu CONTENTS 1.1 Introduction......................................................
1 Empirical Bayes methods for the transformed Gaussian random field model with additive measurement errors Vivekananda Roy Evangelos Evangelou Zhengyuan Zhu CONTENTS 1.1 Introduction......................................................
Basic math for biology
 Basic math for biology Lei Li Florida State University, Feb 6, 2002 The EM algorithm: setup Parametric models: {P θ }. Data: full data (Y, X); partial data Y. Missing data: X. Likelihood and maximum likelihood
Basic math for biology Lei Li Florida State University, Feb 6, 2002 The EM algorithm: setup Parametric models: {P θ }. Data: full data (Y, X); partial data Y. Missing data: X. Likelihood and maximum likelihood