Image Reconstruction from Projection
|
|
|
- Suzan Morrison
- 5 years ago
- Views:
Transcription
1 Image Reconstruction from Projection Reconstruct an image from a series of projections X-ray computed tomography (CT) Computed tomography is a medical imaging method employing tomography where digital geometry processing is used to generate a three-dimensional image of the internals of an object from a large series of two-dimensional X-ray images taken around a single axis of rotation. 3/11/
2 Backprojection In computed tomography or other imaging techniques requiring reconstruction from multiple projections, an algorithm for calculating the contribution of each voxel of the structure to the measured ray data, to generate an image; the oldest and simplest method of image reconstruction. 3/11/


3 Soft, uniform tissue Image Reconstruction: Introduction Intensity is proportional to absorption Uniform with higher absorption Tumor 3/11/

4 Image Reconstruction: Introduction 3/11/

5 3/11/
6 3/11/

7 Other CTs Electron beam CT (Fifth-generation CT) Electron beam tomography (EBCT) was introduced in the early 1980s, by medical physicist Andrew Castagnini, as a method of improving the temporal resolution of CT scanners. High cost of EBCT equipment, and poor flexibility Helical (or spiral) cone beam computed tomography (sixth-generation) A type of three dimensional computed tomography (CT) in which the source (usually of x-rays) describes a helical trajectory relative to the object while a two dimensional array of detectors measures the transmitted radiation on part of a cone of rays emitting from the source 3/11/
8 Other CTs Multislice CT (seventh-generation) The major benefit of multi-slice CT Significant increase in detail Utilizes X-ray tubes more economically Reducing cost and potentially reducing dosage 3/11/
9 Projections and the Radon Transform 3/11/
 δ( x cosθ + y sin θ ρ ) dxdy j k k k j 3/11/2014")
10 Projections and the Radon Transform g( ρ, θ ) = f ( x, y) δ( x cosθ + y sin θ ρ ) dxdy j k k k j 3/11/
11 Projections and the Radon Transform Radon transform gives the projection (line integral) of f(x,y) along an arbitrary line in the xy-plane R f = g ρθ = f x y δx θ + y θ ρdxdy { } (, ) (, ) ( cos sin ) { } M 1N 1 R f = g( ρθ, ) = f( xy, ) δ( xcosθ + ysin θ ρ) x= 0 y= 0 3/11/
12 Example: Using the Radon transform to obtain the projection of a circular region Assume that the circle is centered on the origin of the xy-plane. Because the object is circularly symmetric, its projections are the same for all angles, so we just check the projection for θ = 0 f( xy, ) A x + y r = 0 otherwise 3/11/
13 Example: Using the Radon transform to obtain the projection of a circular region g( ρθ, ) = f ( x, y) δ( x cosθ + y sin θ ρ) dxdy = f ( x, y) δ( x ρ) dxdy = = r f ( ρ, y) dy 2 2 r ρ 2 2 ρ f ( ρ, y) dy = r 2 2 r ρ 2 2 ρ Ady = A r ρ ρ r 0 otherwise 3/11/
 = 0")

14 A r ρ ρ g( ρ) = 0 otherwise r 3/11/

15 Sinogram: The Result of Radon Transform Sinogram: the result of Radon transform is displayed as an image with ρ and θ as rectilinear coordinates 3/11/
 0 θ = 0 A back-projected image formed is referred to as a laminogram 3/11/2014")
16 Image Reconstruction fθ ( xy, ) = gx ( cosθ + ysin θθ, ) π f( xy, ) = fθ ( xyd, ) θ π f( xy, ) = fθ ( xy, ) 0 θ = 0 A back-projected image formed is referred to as a laminogram 3/11/
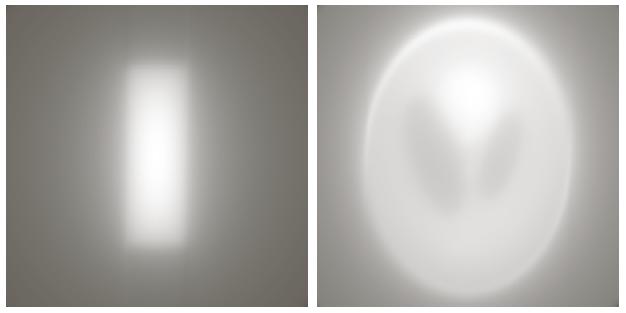
17 Examples: Laminogram 3/11/
18 The Fourier-Slice Theorem For a given value of θ, the 1-D Fourier transform of a projection with respect to ρ is j2πωρ Gw (, ) g(, ) e d θ = ρθ ρ j2πωρ G( ωθ, ) = f ( x, y) δ( x cosθ + y sin θ ρ) e dρdxdy = + = j2 f ( x, y) πωρ δ( x cosθ y sin θ ρ) e d ρ dxdy f ( x, y) e j2 πω ( xcosθ + ysin θ ) dxdy 3/11/
19 The Fourier-Slice Theorem j2πωρ Gw (, ) g(, ) e d θ = ρθ ρ j2 πω ( xcosθ + ysin θ ) G( ωθ, ) = f ( x, y) e dxdy j 2 π ( ux+ vy) = f ( x, y) e dxdy u= wcos θ, v= wsinθ = [ Fuv (, )] u= wcos θ, v= wsinθ = Fw ( cos θ, wsin θ) Fourier-slice theorem: The Fourier tansform of a projection is a slice of the 2-D Fourier transform of the region from which the projection was obtained 3/11/


20 Illustration of the Fourier-slice theorem 3/11/
21 Reconstruction Using Parallel-Beam Filtered Backprojections j 2 ( ux vy) f ( x, y) = π + F( u, v) e dudv Let u = wcos θ, v = w sin θ, then dudv = wdwdθ, 2π j2 πw( xcosθ+ ysin θ) f ( x, y) = F( wcos, wsin ) e wdwd 0 0 = θ θ θ 2π j2 πw( xcosθ+ ysin θ) G( w, θ) e wdwd 0 0 Gw (, θ ) = G( w, θ) π 2 ( cos sin ) (, ) (, ) j π f x y w G w e w x θ+ y θ = θ dwd 0 θ θ 3/11/
22 Reconstruction Using Parallel-Beam Filtered Backprojections π j2 πw( xcosθ+ ysin θ) f ( x, y) = w G( w, θ) e dwd 0 It s not integrable = π 0 (, θ) θ j2πwρ w G w e dw d ρ= xcosθ+ ysinθ θ Approach: Window the ramp so it becomes zero outside of a defined frequency interval. That is, a window band-limits the ramp filter. 3/11/
23 Hamming / Hann Widow 2π w c + ( c 1) cos 0 w ( M 1) hw ( ) = M 1 0 otherwise c c = 0.54, the function is called the Hamming window = 0.5, the function is called the Han window 3/11/

24 The Plot of Hamming Widow 3/11/
25 Filtered Backprojection The complete, filtered backprojection (to obtain the reconstructed image f(x,y) ) is described as follows: 1. Compute the 1-D Fourier transform of each projection 2. Multiply each Fourier transform by the filter function w which has been multiplied by a suitable (e.g., Hamming) window 3. Obtain the inverse 1-D Fourier transform of each resulting filtered transform 4. Integrate (sum) all the 1-D inverse transforms from step 3 3/11/


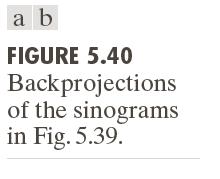
26 Examples: Filtered Backprojection 3/11/

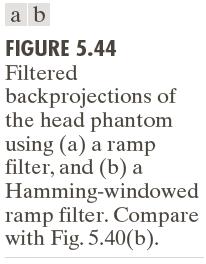
27 Examples: Filtered Backprojection 3/11/
 = w G( w, θ) e dw d 0 ρ= xcosθ+ ysinθ = π [ ( ) (, )] s ρ g ρθ dθ 0 ρ= xcosθ+ ysinθ π = g( ρθ, ) sx ( cosθ ysin θ ρ) dρ + dθ 0 θ")
28 Implementation of Filtered Backprojection in Spatial Domain Fourier transform of the product of two frequency domain functions is equal to the convolution of the spatial representation Let s(p) denote the inverse Fourier transform of w π j2πwρ f ( x, y) = w G( w, θ) e dw d 0 ρ= xcosθ+ ysinθ = π [ ( ) (, )] s ρ g ρθ dθ 0 ρ= xcosθ+ ysinθ π = g( ρθ, ) sx ( cosθ ysin θ ρ) dρ + dθ 0 θ 3/11/

29 Reconstruction Using Fan-Beam Filtered Backprojections θ = α + β ρ = Dsinα 3/11/
30 Reconstruction Using Fan-Beam Filtered Backprojections Objects are encompassed within a circular area of radius T about the origin of the plane, or g( ρθ, )=0 for ρ >T π f( xy, ) = g( ρθ, ) sx ( cosθ ysin θ ρ) dρ + dθ 0 1 2π T = g( ρθ, ) sx ( cosθ + ysin θ ρ) dρdθ 2 0 T x= rcos ϕ; y = rsinϕ xcosθ + ysinθ = rcosϕcosθ + rsinϕsinθ = r cos( ϕ θ) 3/11/
31 Reconstruction Using Fan-Beam Filtered Backprojections x= rcos ϕ; y = rsinϕ xcosθ + ysinθ = rcosϕcosθ + rsinϕsinθ = r cos( ϕ θ) 1 2π T f( xy, ) = g( ρθ, ) sr [ cos( ϕ θ) ρ] dρdθ 2 0 T θ = α + β ρ = Dsin dρdθ = Dcosαdαdβ α 3/11/
32 Reconstruction Using Fan-Beam Filtered Backprojections dρdθ = Dcosαdαdβ 1 2π T f( xy, ) = (, ) [ cos( ) ] 2 0 gρθ sr ϕ θ ρ dρdθ T 1 1 2π α sin ( T/ D) = gd ( sin α, α β) sr 1 [ cos( α β ϕ) Dsinα] Dcosαdαdβ 2 α + + sin ( T/ D) 3/11/
33 Reconstruction Using Fan-Beam Filtered Backprojections 1 2π T f( xy, ) = (, ) [ cos( ) ] 2 0 gρθ sr ϕ θ ρ dρdθ T 1 1 2π α sin ( T/ D) = gd ( sin α, α β) sr 1 [ cos( α β ϕ) Dsinα] Dcosαdαdβ 2 α + + sin ( T/ D) 1 2π αm f( r, ϕ) = p( αβ, ) s Rsin ( α' α) Dcosαdαdβ 2 0 α m α sr ( sin α) = s( α) Rsinα 2 2π 1 αm f(, r ϕ) = q( αβ, ) h 2 ( α' α) dα dβ 0 R αm 2 1 α h( α) = s( α), q( αβ, ) = p( αβ, ) Dcosα 2 sinα 3/11/


34 3/11/

35 3/11/
Principles of Computed Tomography (CT)
") Page 298 Princiles of Comuted Tomograhy (CT) The theoretical foundation of CT dates back to Johann Radon, a mathematician from Vienna who derived a method in 1907 for rojecting a 2-D object along arallel
Page 298 Princiles of Comuted Tomograhy (CT) The theoretical foundation of CT dates back to Johann Radon, a mathematician from Vienna who derived a method in 1907 for rojecting a 2-D object along arallel
EE 4372 Tomography. Carlos E. Davila, Dept. of Electrical Engineering Southern Methodist University
 EE 4372 Tomography Carlos E. Davila, Dept. of Electrical Engineering Southern Methodist University EE 4372, SMU Department of Electrical Engineering 86 Tomography: Background 1-D Fourier Transform: F(
EE 4372 Tomography Carlos E. Davila, Dept. of Electrical Engineering Southern Methodist University EE 4372, SMU Department of Electrical Engineering 86 Tomography: Background 1-D Fourier Transform: F(
MB-JASS D Reconstruction. Hannes Hofmann March 2006
 MB-JASS 2006 2-D Reconstruction Hannes Hofmann 19 29 March 2006 Outline Projections Radon Transform Fourier-Slice-Theorem Filtered Backprojection Ramp Filter 19 29 Mar 2006 Hannes Hofmann 2 Parallel Projections
MB-JASS 2006 2-D Reconstruction Hannes Hofmann 19 29 March 2006 Outline Projections Radon Transform Fourier-Slice-Theorem Filtered Backprojection Ramp Filter 19 29 Mar 2006 Hannes Hofmann 2 Parallel Projections
Tomography and Reconstruction
 Tomography and Reconstruction Lecture Overview Applications Background/history of tomography Radon Transform Fourier Slice Theorem Filtered Back Projection Algebraic techniques Measurement of Projection
Tomography and Reconstruction Lecture Overview Applications Background/history of tomography Radon Transform Fourier Slice Theorem Filtered Back Projection Algebraic techniques Measurement of Projection
Midterm Review. Yao Wang Polytechnic University, Brooklyn, NY 11201
 Midterm Review Yao Wang Polytechnic University, Brooklyn, NY 11201 Based on J. L. Prince and J. M. Links, Medical maging Signals and Systems, and lecture notes by Prince. Figures are from the textbook.
Midterm Review Yao Wang Polytechnic University, Brooklyn, NY 11201 Based on J. L. Prince and J. M. Links, Medical maging Signals and Systems, and lecture notes by Prince. Figures are from the textbook.
Backprojection. Projections. Projections " $ & cosθ & Bioengineering 280A Principles of Biomedical Imaging. Fall Quarter 2014 CT/Fourier Lecture 2
 Backprojection Bioengineering 280A Principles of Biomedical Imaging 3 0 0 0 0 3 0 0 0 0 0 3 0 0 3 0 3 Fall Quarter 2014 CT/Fourier Lecture 2 0 0 0 1 1 1 0 0 0 1 0 0 1 2 1 0 0 1 1 1 0 1 3 1 0 1 1 1 1 1
Backprojection Bioengineering 280A Principles of Biomedical Imaging 3 0 0 0 0 3 0 0 0 0 0 3 0 0 3 0 3 Fall Quarter 2014 CT/Fourier Lecture 2 0 0 0 1 1 1 0 0 0 1 0 0 1 2 1 0 0 1 1 1 0 1 3 1 0 1 1 1 1 1
Maximal Entropy for Reconstruction of Back Projection Images
 Maximal Entropy for Reconstruction of Back Projection Images Tryphon Georgiou Department of Electrical and Computer Engineering University of Minnesota Minneapolis, MN 5545 Peter J Olver Department of
Maximal Entropy for Reconstruction of Back Projection Images Tryphon Georgiou Department of Electrical and Computer Engineering University of Minnesota Minneapolis, MN 5545 Peter J Olver Department of
A Brief Introduction to Medical Imaging. Outline
 A Brief Introduction to Medical Imaging Outline General Goals Linear Imaging Systems An Example, The Pin Hole Camera Radiations and Their Interactions with Matter Coherent vs. Incoherent Imaging Length
A Brief Introduction to Medical Imaging Outline General Goals Linear Imaging Systems An Example, The Pin Hole Camera Radiations and Their Interactions with Matter Coherent vs. Incoherent Imaging Length
1D Convolution. Convolution g[m] = g[0]δ[m] + g[1]δ[m 1] + g[2]δ[m 2] h[m',k] = L[δ[m k]] = h[ m $ k]
![1D Convolution. Convolution g[m] = g[0]δ[m] + g[1]δ[m 1] + g[2]δ[m 2] h[m',k] = L[δ[m k]] = h[ m $ k]](/thumbs/90/104468011.jpg "1D Convolution. Convolution g[m] = g[0]δ[m] + g[1]δ[m 1] + g[2]δ[m 2] h[m',k] = L[δ[m k]] = h[ m $ k]") cm 5 cm Bioengineering 28A Principles of Biomeical Imaging Assume =/2 Fall Quarter 24 X-Rays Lecture 2 cm 5 cm cm cm Assume =/2 Assume =/2 Convolution g[m] = g[]δ[m] + g[]δ[m ] + g[2]δ[m 2] h[m,k] = L[δ[m
cm 5 cm Bioengineering 28A Principles of Biomeical Imaging Assume =/2 Fall Quarter 24 X-Rays Lecture 2 cm 5 cm cm cm Assume =/2 Assume =/2 Convolution g[m] = g[]δ[m] + g[]δ[m ] + g[2]δ[m 2] h[m,k] = L[δ[m
Topics. EM spectrum. X-Rays Computed Tomography Direct Inverse and Iterative Inverse Backprojection Projection Theorem Filtered Backprojection
 Bioengineering 28A Principles of Biomedical Imaging Fall Quarter 25 X-Rays/CT Lecture Topics X-Rays Computed Tomography Direct Inverse and Iterative Inverse Backprojection Projection Theorem Filtered Backprojection
Bioengineering 28A Principles of Biomedical Imaging Fall Quarter 25 X-Rays/CT Lecture Topics X-Rays Computed Tomography Direct Inverse and Iterative Inverse Backprojection Projection Theorem Filtered Backprojection
Bioengineering 280A Principles of Biomedical Imaging. Fall Quarter 2005 X-Rays/CT Lecture 1. Topics
 Bioengineering 28A Principles of Biomedical Imaging Fall Quarter 25 X-Rays/CT Lecture Topics X-Rays Computed Tomography Direct Inverse and Iterative Inverse Backprojection Projection Theorem Filtered Backprojection
Bioengineering 28A Principles of Biomedical Imaging Fall Quarter 25 X-Rays/CT Lecture Topics X-Rays Computed Tomography Direct Inverse and Iterative Inverse Backprojection Projection Theorem Filtered Backprojection
MIT 2.71/2.710 Optics 10/31/05 wk9-a-1. The spatial frequency domain
 10/31/05 wk9-a-1 The spatial frequency domain Recall: plane wave propagation x path delay increases linearly with x λ z=0 θ E 0 x exp i2π sinθ + λ z i2π cosθ λ z plane of observation 10/31/05 wk9-a-2 Spatial
10/31/05 wk9-a-1 The spatial frequency domain Recall: plane wave propagation x path delay increases linearly with x λ z=0 θ E 0 x exp i2π sinθ + λ z i2π cosθ λ z plane of observation 10/31/05 wk9-a-2 Spatial
Topics. EM spectrum. X-Rays Computed Tomography Direct Inverse and Iterative Inverse Backprojection Projection Theorem Filtered Backprojection
 Bioengineering 28A Principles of Biomedical Imaging Fall Quarter 24 X-Rays/CT Lecture Topics X-Rays Computed Tomography Direct Inverse and Iterative Inverse Backprojection Projection Theorem Filtered Backprojection
Bioengineering 28A Principles of Biomedical Imaging Fall Quarter 24 X-Rays/CT Lecture Topics X-Rays Computed Tomography Direct Inverse and Iterative Inverse Backprojection Projection Theorem Filtered Backprojection
ROI Reconstruction in CT
 Reconstruction in CT From Tomo reconstruction in the 21st centery, IEEE Sig. Proc. Magazine (R.Clackdoyle M.Defrise) L. Desbat TIMC-IMAG September 10, 2013 L. Desbat Reconstruction in CT Outline 1 CT Radiology
Reconstruction in CT From Tomo reconstruction in the 21st centery, IEEE Sig. Proc. Magazine (R.Clackdoyle M.Defrise) L. Desbat TIMC-IMAG September 10, 2013 L. Desbat Reconstruction in CT Outline 1 CT Radiology
GBS765 Electron microscopy
 GBS765 Electron microscopy Lecture 1 Waves and Fourier transforms 10/14/14 9:05 AM Some fundamental concepts: Periodicity! If there is some a, for a function f(x), such that f(x) = f(x + na) then function
GBS765 Electron microscopy Lecture 1 Waves and Fourier transforms 10/14/14 9:05 AM Some fundamental concepts: Periodicity! If there is some a, for a function f(x), such that f(x) = f(x + na) then function
BioE Exam 1 10/9/2018 Answer Sheet - Correct answer is A for all questions. 1. The sagittal plane
 BioE 1330 - Exam 1 10/9/2018 Answer Sheet - Correct answer is A for all questions 1. The sagittal plane A. is perpendicular to the coronal plane. B. is parallel to the top of the head. C. represents a
BioE 1330 - Exam 1 10/9/2018 Answer Sheet - Correct answer is A for all questions 1. The sagittal plane A. is perpendicular to the coronal plane. B. is parallel to the top of the head. C. represents a
G52IVG, School of Computer Science, University of Nottingham
 Image Transforms Fourier Transform Basic idea 1 Image Transforms Fourier transform theory Let f(x) be a continuous function of a real variable x. The Fourier transform of f(x) is F ( u) f ( x)exp[ j2πux]
Image Transforms Fourier Transform Basic idea 1 Image Transforms Fourier transform theory Let f(x) be a continuous function of a real variable x. The Fourier transform of f(x) is F ( u) f ( x)exp[ j2πux]
ON A CLASS OF GENERALIZED RADON TRANSFORMS AND ITS APPLICATION IN IMAGING SCIENCE
 ON A CLASS OF GENERALIZED RADON TRANSFORMS AND ITS APPLICATION IN IMAGING SCIENCE T.T. TRUONG 1 AND M.K. NGUYEN 2 1 University of Cergy-Pontoise, LPTM CNRS UMR 889, F-9532, France e-mail: truong@u-cergy.fr
ON A CLASS OF GENERALIZED RADON TRANSFORMS AND ITS APPLICATION IN IMAGING SCIENCE T.T. TRUONG 1 AND M.K. NGUYEN 2 1 University of Cergy-Pontoise, LPTM CNRS UMR 889, F-9532, France e-mail: truong@u-cergy.fr
Chap. 15 Radiation Imaging
 Chap. 15 Radiation Imaging 15.1 INTRODUCTION Modern Medical Imaging Devices Incorporating fundamental concepts in physical science and innovations in computer technology Nobel prize (physics) : 1895 Wilhelm
Chap. 15 Radiation Imaging 15.1 INTRODUCTION Modern Medical Imaging Devices Incorporating fundamental concepts in physical science and innovations in computer technology Nobel prize (physics) : 1895 Wilhelm
The mathematics behind Computertomography
 Radon transforms The mathematics behind Computertomography PD Dr. Swanhild Bernstein, Institute of Applied Analysis, Freiberg University of Mining and Technology, International Summer academic course 2008,
Radon transforms The mathematics behind Computertomography PD Dr. Swanhild Bernstein, Institute of Applied Analysis, Freiberg University of Mining and Technology, International Summer academic course 2008,
1-D Fourier Transform Pairs
 1-D Fourier Transform Pairs The concept of the PSF is most easily explained by considering a very small point source being placed in the imaging field-of-view The relationship between the image, I, and
1-D Fourier Transform Pairs The concept of the PSF is most easily explained by considering a very small point source being placed in the imaging field-of-view The relationship between the image, I, and
1. Which of the following statements is true about Bremsstrahlung and Characteristic Radiation?
 BioE 1330 - Review Chapters 4, 5, and 6 (X-ray and CT) 9/27/2018 Instructions: On the Answer Sheet, enter your 2-digit ID number (with a leading 0 if needed) in the boxes of the ID section. Fill in the
BioE 1330 - Review Chapters 4, 5, and 6 (X-ray and CT) 9/27/2018 Instructions: On the Answer Sheet, enter your 2-digit ID number (with a leading 0 if needed) in the boxes of the ID section. Fill in the
ELEG 479 Lecture #6. Mark Mirotznik, Ph.D. Associate Professor The University of Delaware
 ELEG 479 Lecture #6 Mark Mirotznik, Ph.D. Associate Professor The University of Delaware Summary of Last Lecture X-ray Physics What are X-rays and when are they useful for medical imaging? How are X-rays
ELEG 479 Lecture #6 Mark Mirotznik, Ph.D. Associate Professor The University of Delaware Summary of Last Lecture X-ray Physics What are X-rays and when are they useful for medical imaging? How are X-rays
COMPUTATIONAL IMAGING. Berthold K.P. Horn
 COMPUTATIONAL IMAGING Berthold K.P. Horn What is Computational Imaging? Computation inherent in image formation What is Computational Imaging? Computation inherent in image formation (1) Computing is getting
COMPUTATIONAL IMAGING Berthold K.P. Horn What is Computational Imaging? Computation inherent in image formation What is Computational Imaging? Computation inherent in image formation (1) Computing is getting
Created by T. Madas SURFACE INTEGRALS. Created by T. Madas
 SURFACE INTEGRALS Question 1 Find the area of the plane with equation x + 3y + 6z = 60, 0 x 4, 0 y 6. 8 Question A surface has Cartesian equation y z x + + = 1. 4 5 Determine the area of the surface which
SURFACE INTEGRALS Question 1 Find the area of the plane with equation x + 3y + 6z = 60, 0 x 4, 0 y 6. 8 Question A surface has Cartesian equation y z x + + = 1. 4 5 Determine the area of the surface which
e x3 dx dy. 0 y x 2, 0 x 1.
 Problem 1. Evaluate by changing the order of integration y e x3 dx dy. Solution:We change the order of integration over the region y x 1. We find and x e x3 dy dx = y x, x 1. x e x3 dx = 1 x=1 3 ex3 x=
Problem 1. Evaluate by changing the order of integration y e x3 dx dy. Solution:We change the order of integration over the region y x 1. We find and x e x3 dy dx = y x, x 1. x e x3 dx = 1 x=1 3 ex3 x=
Lecture 9 February 2, 2016
 MATH 262/CME 372: Applied Fourier Analysis and Winter 26 Elements of Modern Signal Processing Lecture 9 February 2, 26 Prof. Emmanuel Candes Scribe: Carlos A. Sing-Long, Edited by E. Bates Outline Agenda:
MATH 262/CME 372: Applied Fourier Analysis and Winter 26 Elements of Modern Signal Processing Lecture 9 February 2, 26 Prof. Emmanuel Candes Scribe: Carlos A. Sing-Long, Edited by E. Bates Outline Agenda:
Convolution/Modulation Theorem. 2D Convolution/Multiplication. Application of Convolution Thm. Bioengineering 280A Principles of Biomedical Imaging
 Bioengineering 8A Principles of Biomedical Imaging Fall Quarter 15 CT/Fourier Lecture 4 Convolution/Modulation Theorem [ ] e j πx F{ g(x h(x } = g(u h(x udu = g(u h(x u e j πx = g(uh( e j πu du = H( dxdu
Bioengineering 8A Principles of Biomedical Imaging Fall Quarter 15 CT/Fourier Lecture 4 Convolution/Modulation Theorem [ ] e j πx F{ g(x h(x } = g(u h(x udu = g(u h(x u e j πx = g(uh( e j πu du = H( dxdu
Answer sheet: Final exam for Math 2339, Dec 10, 2010
 Answer sheet: Final exam for Math 9, ec, Problem. Let the surface be z f(x,y) ln(y + cos(πxy) + e ). (a) Find the gradient vector of f f(x,y) y + cos(πxy) + e πy sin(πxy), y πx sin(πxy) (b) Evaluate f(,
Answer sheet: Final exam for Math 9, ec, Problem. Let the surface be z f(x,y) ln(y + cos(πxy) + e ). (a) Find the gradient vector of f f(x,y) y + cos(πxy) + e πy sin(πxy), y πx sin(πxy) (b) Evaluate f(,
Master of Intelligent Systems - French-Czech Double Diploma. Hough transform
 Hough transform I- Introduction The Hough transform is used to isolate features of a particular shape within an image. Because it requires that the desired features be specified in some parametric form,
Hough transform I- Introduction The Hough transform is used to isolate features of a particular shape within an image. Because it requires that the desired features be specified in some parametric form,
Final exam: CS 663, Digital Image Processing, 21 st November
 Final exam: CS 663, Digital Image Processing, 21 st November Instructions: There are 180 minutes for this exam (5:30 pm to 8:30 pm). Answer all 8 questions. This exam is worth 25% of the final grade. Some
Final exam: CS 663, Digital Image Processing, 21 st November Instructions: There are 180 minutes for this exam (5:30 pm to 8:30 pm). Answer all 8 questions. This exam is worth 25% of the final grade. Some
Convolution Theorem Modulation Transfer Function y(t)=g(t)*h(t)
=g(t)*h(t)") MTF = Fourier Transform of PSF Bioengineering 28A Principles of Biomedical Imaging Fall Quarter 214 CT/Fourier Lecture 4 Bushberg et al 21 Convolution Theorem Modulation Transfer Function y(t=g(t*h(t g(t
MTF = Fourier Transform of PSF Bioengineering 28A Principles of Biomedical Imaging Fall Quarter 214 CT/Fourier Lecture 4 Bushberg et al 21 Convolution Theorem Modulation Transfer Function y(t=g(t*h(t g(t
22.56J Noninvasive Imaging in Biology and Medicine Instructor: Prof. Alan Jasanoff Fall 2005, TTh 1-2:30
 22.56J Noninvasive Imaging in Biology and Medicine Instructor: Prof. Alan Jasanoff Fall 2005, TTh 1-2:30 Sample problems HW1 1. Look up (e.g. in the CRC Manual of Chemistry and Physics www.hbcpnetbase.com)
22.56J Noninvasive Imaging in Biology and Medicine Instructor: Prof. Alan Jasanoff Fall 2005, TTh 1-2:30 Sample problems HW1 1. Look up (e.g. in the CRC Manual of Chemistry and Physics www.hbcpnetbase.com)
The Radon Transform and the Mathematics of Medical Imaging
 Colby College Digital Commons @ Colby Honors Theses Student Research 2012 The Radon Transform and the Mathematics of Medical Imaging Jen Beatty Colby College Follow this and additional works at: http://digitalcommons.colby.edu/honorstheses
Colby College Digital Commons @ Colby Honors Theses Student Research 2012 The Radon Transform and the Mathematics of Medical Imaging Jen Beatty Colby College Follow this and additional works at: http://digitalcommons.colby.edu/honorstheses
Magnetic resonance imaging MRI
 Magnetic resonance imaging MRI Introduction What is MRI MRI is an imaging technique used primarily in medical settings that uses a strong magnetic field and radio waves to produce very clear and detailed
Magnetic resonance imaging MRI Introduction What is MRI MRI is an imaging technique used primarily in medical settings that uses a strong magnetic field and radio waves to produce very clear and detailed
Feature Reconstruction in Tomography
 Feature Reconstruction in Tomography Alfred K. Louis Institut für Angewandte Mathematik Universität des Saarlandes 66041 Saarbrücken http://www.num.uni-sb.de louis@num.uni-sb.de Wien, July 20, 2009 Images
Feature Reconstruction in Tomography Alfred K. Louis Institut für Angewandte Mathematik Universität des Saarlandes 66041 Saarbrücken http://www.num.uni-sb.de louis@num.uni-sb.de Wien, July 20, 2009 Images
Tutorial. The two- dimensional Fourier transform. θ =. For example, if f( x, y) = cos[2 π( xcosθ + ysin θ)]
![Tutorial. The two- dimensional Fourier transform. θ =. For example, if f( x, y) = cos[2 π( xcosθ + ysin θ)]](/thumbs/78/77823085.jpg "Tutorial. The two- dimensional Fourier transform. θ =. For example, if f( x, y) = cos[2 π( xcosθ + ysin θ)]") Tutorial Many of the linear transforms in common use have a direct connection with either the Fourier or the Laplace transform [- 7]. The closest relationship is with the generalizations of the Fourier
Tutorial Many of the linear transforms in common use have a direct connection with either the Fourier or the Laplace transform [- 7]. The closest relationship is with the generalizations of the Fourier
Math 265 (Butler) Practice Midterm III B (Solutions)
 Practice Midterm III B (Solutions)") Math 265 (Butler) Practice Midterm III B (Solutions). Set up (but do not evaluate) an integral for the surface area of the surface f(x, y) x 2 y y over the region x, y 4. We have that the surface are is
Math 265 (Butler) Practice Midterm III B (Solutions). Set up (but do not evaluate) an integral for the surface area of the surface f(x, y) x 2 y y over the region x, y 4. We have that the surface are is
Hamburger Beiträge zur Angewandten Mathematik
 Hamburger Beiträge zur Angewandten Mathematik Error Estimates for Filtered Back Projection Matthias Beckmann and Armin Iske Nr. 2015-03 January 2015 Error Estimates for Filtered Back Projection Matthias
Hamburger Beiträge zur Angewandten Mathematik Error Estimates for Filtered Back Projection Matthias Beckmann and Armin Iske Nr. 2015-03 January 2015 Error Estimates for Filtered Back Projection Matthias
Fast variance predictions for 3D cone-beam CT with quadratic regularization
 Honorable Mention Poster Award Fast variance predictions for 3D cone-beam CT with quadratic regularization Yingying Zhang-O Connor and Jeffrey A. Fessler a a Department of Electrical Engineering and Computer
Honorable Mention Poster Award Fast variance predictions for 3D cone-beam CT with quadratic regularization Yingying Zhang-O Connor and Jeffrey A. Fessler a a Department of Electrical Engineering and Computer
The relationship between image noise and spatial resolution of CT scanners
 The relationship between image noise and spatial resolution of CT scanners Sue Edyvean, Nicholas Keat, Maria Lewis, Julia Barrett, Salem Sassi, David Platten ImPACT*, St George s Hospital, London *An MDA
The relationship between image noise and spatial resolution of CT scanners Sue Edyvean, Nicholas Keat, Maria Lewis, Julia Barrett, Salem Sassi, David Platten ImPACT*, St George s Hospital, London *An MDA
Simple Co-ordinate geometry problems
 Simple Co-ordinate geometry problems 1. Find the equation of straight line passing through the point P(5,2) with equal intercepts. 1. Method 1 Let the equation of straight line be + =1, a,b 0 (a) If a=b
Simple Co-ordinate geometry problems 1. Find the equation of straight line passing through the point P(5,2) with equal intercepts. 1. Method 1 Let the equation of straight line be + =1, a,b 0 (a) If a=b
A NOVEL 1 ST GENERATION COMPUTED TOMOGRAPHY SCANNER. Nicholas L. Kingsley
 A NOVEL 1 ST GENERATION COMPUTED TOMOGRAPHY SCANNER By Nicholas L. Kingsley A thesis submitted in partial fulfillment of the requirements for the degree of Bachelor of Science Houghton College December
A NOVEL 1 ST GENERATION COMPUTED TOMOGRAPHY SCANNER By Nicholas L. Kingsley A thesis submitted in partial fulfillment of the requirements for the degree of Bachelor of Science Houghton College December
Fast variance predictions for 3D cone-beam CT with quadratic regularization
 Fast variance predictions for 3D cone-beam CT with quadratic regularization Yingying Zhang-O Connor and Jeffrey A. Fessler a a Department of Electrical Engineering and Computer Science, The University
Fast variance predictions for 3D cone-beam CT with quadratic regularization Yingying Zhang-O Connor and Jeffrey A. Fessler a a Department of Electrical Engineering and Computer Science, The University
1 Radon Transform and X-Ray CT
 Radon Transform and X-Ray CT In this section we look at an important class of imaging problems, the inverse Radon transform. We have seen that X-ray CT (Computerized Tomography) involves the reconstruction
Radon Transform and X-Ray CT In this section we look at an important class of imaging problems, the inverse Radon transform. We have seen that X-ray CT (Computerized Tomography) involves the reconstruction
Note: Each problem is worth 14 points except numbers 5 and 6 which are 15 points. = 3 2
 Math Prelim II Solutions Spring Note: Each problem is worth points except numbers 5 and 6 which are 5 points. x. Compute x da where is the region in the second quadrant between the + y circles x + y and
Math Prelim II Solutions Spring Note: Each problem is worth points except numbers 5 and 6 which are 5 points. x. Compute x da where is the region in the second quadrant between the + y circles x + y and
Shaped sensor for material agnostic Lamb waves direction of arrival (DoA) estimation
 estimation") Shaped sensor for material agnostic Lamb waves direction of arrival (DoA) estimation More info about this article: http://www.ndt.net/?id=3340 Abstract Luca De Marchi, Marco Dibiase, Nicola Testoni and
Shaped sensor for material agnostic Lamb waves direction of arrival (DoA) estimation More info about this article: http://www.ndt.net/?id=3340 Abstract Luca De Marchi, Marco Dibiase, Nicola Testoni and
Studies on implementation of the Katsevich algorithm for spiral cone-beam CT
 Journal of X-Ray Science and Technology 12 (2004) 97 116 97 IOS Press Studies on implementation of the Katsevich algorithm for spiral cone-beam CT Hengyong Yu a and Ge Wang b a College of Communication
Journal of X-Ray Science and Technology 12 (2004) 97 116 97 IOS Press Studies on implementation of the Katsevich algorithm for spiral cone-beam CT Hengyong Yu a and Ge Wang b a College of Communication
Notes on the point spread function and resolution for projection lens/corf. 22 April 2009 Dr. Raymond Browning
 Notes on the point spread function and resolution for projection lens/corf Abstract April 009 Dr. Raymond Browning R. Browning Consultants, 4 John Street, Shoreham, NY 786 Tel: (63) 8 348 This is a calculation
Notes on the point spread function and resolution for projection lens/corf Abstract April 009 Dr. Raymond Browning R. Browning Consultants, 4 John Street, Shoreham, NY 786 Tel: (63) 8 348 This is a calculation
Compton Camera. Compton Camera
 Diagnostic Imaging II Student Project Compton Camera Ting-Tung Chang Introduction The Compton camera operates by exploiting the Compton Effect. It uses the kinematics of Compton scattering to contract
Diagnostic Imaging II Student Project Compton Camera Ting-Tung Chang Introduction The Compton camera operates by exploiting the Compton Effect. It uses the kinematics of Compton scattering to contract
NIH Public Access Author Manuscript Proc Soc Photo Opt Instrum Eng. Author manuscript; available in PMC 2013 December 17.
 NIH Public Access Author Manuscript Published in final edited form as: Proc Soc Photo Opt Instrum Eng. 2008 March 18; 6913:. doi:10.1117/12.769604. Tomographic Reconstruction of Band-limited Hermite Expansions
NIH Public Access Author Manuscript Published in final edited form as: Proc Soc Photo Opt Instrum Eng. 2008 March 18; 6913:. doi:10.1117/12.769604. Tomographic Reconstruction of Band-limited Hermite Expansions
University of Cyprus. Reflectance and Diffuse Spectroscopy
 University of Cyprus Biomedical Imaging and Applied Optics Reflectance and Diffuse Spectroscopy Spectroscopy What is it? from the Greek: spectro = color + scope = look at or observe = measuring/recording
University of Cyprus Biomedical Imaging and Applied Optics Reflectance and Diffuse Spectroscopy Spectroscopy What is it? from the Greek: spectro = color + scope = look at or observe = measuring/recording
Introduction to the Mathematics of Medical Imaging
 Introduction to the Mathematics of Medical Imaging Second Edition Charles L. Epstein University of Pennsylvania Philadelphia, Pennsylvania EiaJTL Society for Industrial and Applied Mathematics Philadelphia
Introduction to the Mathematics of Medical Imaging Second Edition Charles L. Epstein University of Pennsylvania Philadelphia, Pennsylvania EiaJTL Society for Industrial and Applied Mathematics Philadelphia
Introduction to the Fourier transform. Computer Vision & Digital Image Processing. The Fourier transform (continued) The Fourier transform (continued)
 The Fourier transform (continued)") Introduction to the Fourier transform Computer Vision & Digital Image Processing Fourier Transform Let f(x) be a continuous function of a real variable x The Fourier transform of f(x), denoted by I {f(x)}
Introduction to the Fourier transform Computer Vision & Digital Image Processing Fourier Transform Let f(x) be a continuous function of a real variable x The Fourier transform of f(x), denoted by I {f(x)}
Microlocal Methods in X-ray Tomography
 Microlocal Methods in X-ray Tomography Plamen Stefanov Purdue University Lecture I: Euclidean X-ray tomography Mini Course, Fields Institute, 2012 Plamen Stefanov (Purdue University ) Microlocal Methods
Microlocal Methods in X-ray Tomography Plamen Stefanov Purdue University Lecture I: Euclidean X-ray tomography Mini Course, Fields Institute, 2012 Plamen Stefanov (Purdue University ) Microlocal Methods
Statistical Tomographic Image Reconstruction Methods for Randoms-Precorrected PET Measurements
 Statistical Tomographic Image Reconstruction Methods for Randoms-Precorrected PET Measurements by Mehmet Yavuz A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor
Statistical Tomographic Image Reconstruction Methods for Randoms-Precorrected PET Measurements by Mehmet Yavuz A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor
MATH 52 FINAL EXAM SOLUTIONS
 MAH 5 FINAL EXAM OLUION. (a) ketch the region R of integration in the following double integral. x xe y5 dy dx R = {(x, y) x, x y }. (b) Express the region R as an x-simple region. R = {(x, y) y, x y }
MAH 5 FINAL EXAM OLUION. (a) ketch the region R of integration in the following double integral. x xe y5 dy dx R = {(x, y) x, x y }. (b) Express the region R as an x-simple region. R = {(x, y) y, x y }
The Theory of Diffraction Tomography
 The Theory of Diffraction Tomography Paul Müller 1, Mirjam Schürmann, and Jochen Guck Biotechnology Center, Technische Universität Dresden, Dresden, Germany (Dated: October 10, 2016) Abstract arxiv:1507.00466v3
The Theory of Diffraction Tomography Paul Müller 1, Mirjam Schürmann, and Jochen Guck Biotechnology Center, Technische Universität Dresden, Dresden, Germany (Dated: October 10, 2016) Abstract arxiv:1507.00466v3
Properties of surfaces II: Second moment of area
 Properties of surfaces II: Second moment of area Just as we have discussing first moment of an area and its relation with problems in mechanics, we will now describe second moment and product of area of
Properties of surfaces II: Second moment of area Just as we have discussing first moment of an area and its relation with problems in mechanics, we will now describe second moment and product of area of
MATH 280 Multivariate Calculus Fall Integration over a surface. da. A =
 MATH 28 Multivariate Calculus Fall 212 Integration over a surface Given a surface S in space, we can (conceptually) break it into small pieces each of which has area da. In me cases, we will add up these
MATH 28 Multivariate Calculus Fall 212 Integration over a surface Given a surface S in space, we can (conceptually) break it into small pieces each of which has area da. In me cases, we will add up these
mathematical objects can be described via equations, functions, graphs, parameterization in R, R, and R.
 Multivariable Calculus Lecture # Notes This lecture completes the discussion of the cross product in R and addresses the variety of different ways that n mathematical objects can be described via equations,
Multivariable Calculus Lecture # Notes This lecture completes the discussion of the cross product in R and addresses the variety of different ways that n mathematical objects can be described via equations,
Integrals in cylindrical, spherical coordinates (Sect. 15.7)
") Integrals in clindrical, spherical coordinates (Sect. 15.7 Integration in spherical coordinates. Review: Clindrical coordinates. Spherical coordinates in space. Triple integral in spherical coordinates.
Integrals in clindrical, spherical coordinates (Sect. 15.7 Integration in spherical coordinates. Review: Clindrical coordinates. Spherical coordinates in space. Triple integral in spherical coordinates.
MAT 211 Final Exam. Spring Jennings. Show your work!
 MAT 211 Final Exam. pring 215. Jennings. how your work! Hessian D = f xx f yy (f xy ) 2 (for optimization). Polar coordinates x = r cos(θ), y = r sin(θ), da = r dr dθ. ylindrical coordinates x = r cos(θ),
MAT 211 Final Exam. pring 215. Jennings. how your work! Hessian D = f xx f yy (f xy ) 2 (for optimization). Polar coordinates x = r cos(θ), y = r sin(θ), da = r dr dθ. ylindrical coordinates x = r cos(θ),
Lecture # 06. Image Processing in Frequency Domain
 Digital Image Processing CP-7008 Lecture # 06 Image Processing in Frequency Domain Fall 2011 Outline Fourier Transform Relationship with Image Processing CP-7008: Digital Image Processing Lecture # 6 2
Digital Image Processing CP-7008 Lecture # 06 Image Processing in Frequency Domain Fall 2011 Outline Fourier Transform Relationship with Image Processing CP-7008: Digital Image Processing Lecture # 6 2
Name: Instructor: Lecture time: TA: Section time:
 Math 222 Final May 11, 29 Name: Instructor: Lecture time: TA: Section time: INSTRUCTIONS READ THIS NOW This test has 1 problems on 16 pages worth a total of 2 points. Look over your test package right
Math 222 Final May 11, 29 Name: Instructor: Lecture time: TA: Section time: INSTRUCTIONS READ THIS NOW This test has 1 problems on 16 pages worth a total of 2 points. Look over your test package right
Math 2433 Notes Week Triple Integrals. Integration over an arbitrary solid: Applications: 1. Volume of hypersolid = f ( x, y, z ) dxdydz
 dxdydz") Math 2433 Notes Week 11 15.6 Triple Integrals Integration over an arbitrary solid: Applications: 1. Volume of hypersolid = f ( x, y, z ) dxdydz S 2. Volume of S = dxdydz S Reduction to a repeated integral
Math 2433 Notes Week 11 15.6 Triple Integrals Integration over an arbitrary solid: Applications: 1. Volume of hypersolid = f ( x, y, z ) dxdydz S 2. Volume of S = dxdydz S Reduction to a repeated integral
Dr. Allen Back. Nov. 5, 2014
 Dr. Allen Back Nov. 5, 2014 12 lectures, 4 recitations left including today. a Most of what remains is vector integration and the integral theorems. b We ll start 7.1, 7.2,4.2 on Friday. c If you are not
Dr. Allen Back Nov. 5, 2014 12 lectures, 4 recitations left including today. a Most of what remains is vector integration and the integral theorems. b We ll start 7.1, 7.2,4.2 on Friday. c If you are not
Topics. Example. Modulation. [ ] = G(k x. ] = 1 2 G ( k % k x 0) G ( k + k x 0) ] = 1 2 j G ( k x
![Topics. Example. Modulation. [ ] = G(k x. ] = 1 2 G ( k % k x 0) G ( k + k x 0) ] = 1 2 j G ( k x](/thumbs/95/123667623.jpg "Topics. Example. Modulation. [ ] = G(k x. ] = 1 2 G ( k % k x 0) G ( k + k x 0) ] = 1 2 j G ( k x") Topics Bioengineering 280A Principles of Biomedical Imaging Fall Quarter 2008 CT/Fourier Lecture 3 Modulation Modulation Transfer Function Convolution/Multiplication Revisit Projection-Slice Theorem Filtered
Topics Bioengineering 280A Principles of Biomedical Imaging Fall Quarter 2008 CT/Fourier Lecture 3 Modulation Modulation Transfer Function Convolution/Multiplication Revisit Projection-Slice Theorem Filtered
MULTIVARIABLE INTEGRATION
 MULTIVARIABLE INTEGRATION (PLANE & CYLINDRICAL POLAR COORDINATES) PLANE POLAR COORDINATES Question 1 The finite region on the x-y plane satisfies 1 x + y 4, y 0. Find, in terms of π, the value of I. I
MULTIVARIABLE INTEGRATION (PLANE & CYLINDRICAL POLAR COORDINATES) PLANE POLAR COORDINATES Question 1 The finite region on the x-y plane satisfies 1 x + y 4, y 0. Find, in terms of π, the value of I. I
CIRCLES PART - II Theorem: The condition that the straight line lx + my + n = 0 may touch the circle x 2 + y 2 = a 2 is
 CIRCLES PART - II Theorem: The equation of the tangent to the circle S = 0 at P(x 1, y 1 ) is S 1 = 0. Theorem: The equation of the normal to the circle S x + y + gx + fy + c = 0 at P(x 1, y 1 ) is (y
CIRCLES PART - II Theorem: The equation of the tangent to the circle S = 0 at P(x 1, y 1 ) is S 1 = 0. Theorem: The equation of the normal to the circle S x + y + gx + fy + c = 0 at P(x 1, y 1 ) is (y
MTH4101 CALCULUS II REVISION NOTES. 1. COMPLEX NUMBERS (Thomas Appendix 7 + lecture notes) ax 2 + bx + c = 0. x = b ± b 2 4ac 2a. i = 1.
 ax 2 + bx + c = 0. x = b ± b 2 4ac 2a. i = 1.") MTH4101 CALCULUS II REVISION NOTES 1. COMPLEX NUMBERS (Thomas Appendix 7 + lecture notes) 1.1 Introduction Types of numbers (natural, integers, rationals, reals) The need to solve quadratic equations:
MTH4101 CALCULUS II REVISION NOTES 1. COMPLEX NUMBERS (Thomas Appendix 7 + lecture notes) 1.1 Introduction Types of numbers (natural, integers, rationals, reals) The need to solve quadratic equations:
Restoration of Missing Data in Limited Angle Tomography Based on Helgason- Ludwig Consistency Conditions
 Restoration of Missing Data in Limited Angle Tomography Based on Helgason- Ludwig Consistency Conditions Yixing Huang, Oliver Taubmann, Xiaolin Huang, Guenter Lauritsch, Andreas Maier 26.01. 2017 Pattern
Restoration of Missing Data in Limited Angle Tomography Based on Helgason- Ludwig Consistency Conditions Yixing Huang, Oliver Taubmann, Xiaolin Huang, Guenter Lauritsch, Andreas Maier 26.01. 2017 Pattern
2D X-Ray Tomographic Reconstruction From Few Projections
 2D X-Ray Tomographic Reconstruction From Few Projections Application of Compressed Sensing Theory CEA-LID, Thalès, UJF 6 octobre 2009 Introduction Plan 1 Introduction 2 Overview of Compressed Sensing Theory
2D X-Ray Tomographic Reconstruction From Few Projections Application of Compressed Sensing Theory CEA-LID, Thalès, UJF 6 octobre 2009 Introduction Plan 1 Introduction 2 Overview of Compressed Sensing Theory
Minimum detection window and inter-helix PI-line with triple-source helical cone-beam scanning
 Journal of X-Ray Science and Technology 14 2006) 95 107 95 IOS Press Minimum detection window and inter-helix PI-line with triple-source helical cone-beam scanning Jun Zhao a,, Ming Jiang b, Tiange Zhuang
Journal of X-Ray Science and Technology 14 2006) 95 107 95 IOS Press Minimum detection window and inter-helix PI-line with triple-source helical cone-beam scanning Jun Zhao a,, Ming Jiang b, Tiange Zhuang
Region-of-interest reconstructions from truncated 3D x-ray projections
 Region-of-interest reconstructions from truncated 3D x-ray projections Robert Azencott 1, Bernhard G. Bodmann 1, Demetrio Labate 1, Anando Sen 2, Daniel Vera 1 June 13, 2014 Abstract This paper introduces
Region-of-interest reconstructions from truncated 3D x-ray projections Robert Azencott 1, Bernhard G. Bodmann 1, Demetrio Labate 1, Anando Sen 2, Daniel Vera 1 June 13, 2014 Abstract This paper introduces
Joint Distributions: Part Two 1
 Joint Distributions: Part Two 1 STA 256: Fall 2018 1 This slide show is an open-source document. See last slide for copyright information. 1 / 30 Overview 1 Independence 2 Conditional Distributions 3 Transformations
Joint Distributions: Part Two 1 STA 256: Fall 2018 1 This slide show is an open-source document. See last slide for copyright information. 1 / 30 Overview 1 Independence 2 Conditional Distributions 3 Transformations
Topics. Bioengineering 280A Principles of Biomedical Imaging. Fall Quarter 2006 CT/Fourier Lecture 2
 Bioengineering 280A Principles of Biomedical Imaging Fall Quarter 2006 CT/Fourier Lecture 2 Topics Modulation Modulation Transfer Function Convolution/Multiplication Revisit Projection-Slice Theorem Filtered
Bioengineering 280A Principles of Biomedical Imaging Fall Quarter 2006 CT/Fourier Lecture 2 Topics Modulation Modulation Transfer Function Convolution/Multiplication Revisit Projection-Slice Theorem Filtered
Ke Li and Guang-Hong Chen
 Ke Li and Guang-Hong Chen Brief introduction of x-ray differential phase contrast (DPC) imaging Intrinsic noise relationship between DPC imaging and absorption imaging Task-based model observer studies
Ke Li and Guang-Hong Chen Brief introduction of x-ray differential phase contrast (DPC) imaging Intrinsic noise relationship between DPC imaging and absorption imaging Task-based model observer studies
Digital Image Processing. Filtering in the Frequency Domain
 2D Linear Systems 2D Fourier Transform and its Properties The Basics of Filtering in Frequency Domain Image Smoothing Image Sharpening Selective Filtering Implementation Tips 1 General Definition: System
2D Linear Systems 2D Fourier Transform and its Properties The Basics of Filtering in Frequency Domain Image Smoothing Image Sharpening Selective Filtering Implementation Tips 1 General Definition: System
Math 3435 Homework Set 11 Solutions 10 Points. x= 1,, is in the disk of radius 1 centered at origin
 Math 45 Homework et olutions Points. ( pts) The integral is, x + z y d = x + + z da 8 6 6 where is = x + z 8 x + z = 4 o, is the disk of radius centered on the origin. onverting to polar coordinates then
Math 45 Homework et olutions Points. ( pts) The integral is, x + z y d = x + + z da 8 6 6 where is = x + z 8 x + z = 4 o, is the disk of radius centered on the origin. onverting to polar coordinates then
LECTURES ON MICROLOCAL CHARACTERIZATIONS IN LIMITED-ANGLE
 LECTURES ON MICROLOCAL CHARACTERIZATIONS IN LIMITED-ANGLE TOMOGRAPHY Jürgen Frikel 4 LECTURES 1 Today: Introduction to the mathematics of computerized tomography 2 Mathematics of computerized tomography
LECTURES ON MICROLOCAL CHARACTERIZATIONS IN LIMITED-ANGLE TOMOGRAPHY Jürgen Frikel 4 LECTURES 1 Today: Introduction to the mathematics of computerized tomography 2 Mathematics of computerized tomography
14.1. Multiple Integration. Iterated Integrals and Area in the Plane. Iterated Integrals. Iterated Integrals. MAC2313 Calculus III - Chapter 14
 14 Multiple Integration 14.1 Iterated Integrals and Area in the Plane Objectives Evaluate an iterated integral. Use an iterated integral to find the area of a plane region. Copyright Cengage Learning.
14 Multiple Integration 14.1 Iterated Integrals and Area in the Plane Objectives Evaluate an iterated integral. Use an iterated integral to find the area of a plane region. Copyright Cengage Learning.
6: Positron Emission Tomography
 6: Positron Emission Tomography. What is the principle of PET imaging? Positron annihilation Electronic collimation coincidence detection. What is really measured by the PET camera? True, scatter and random
6: Positron Emission Tomography. What is the principle of PET imaging? Positron annihilation Electronic collimation coincidence detection. What is really measured by the PET camera? True, scatter and random
arxiv:math.ca/ v2 17 Jul 2000
 NECESSARY AND SUFFICIENT CONDITIONS FOR DIFFERENTIABILITY OF A FUNCTION OF SEVERAL VARIABLES. R.P. VENKATARAMAN, #1371, 13'TH MAIN ROAD, II STAGE, FIRST PHASE, B.T.M. LAYOUT, BANGALORE 560 076.
NECESSARY AND SUFFICIENT CONDITIONS FOR DIFFERENTIABILITY OF A FUNCTION OF SEVERAL VARIABLES. R.P. VENKATARAMAN, #1371, 13'TH MAIN ROAD, II STAGE, FIRST PHASE, B.T.M. LAYOUT, BANGALORE 560 076.
Positron Emission Tomography
 Positron Emission Tomography Presenter: Difei Wang June,2018 Universität Bonn Contents 2 / 24 1 2 3 4 Positron emission Detected events Detectors and configuration Data acquisition Positron emission Positron
Positron Emission Tomography Presenter: Difei Wang June,2018 Universität Bonn Contents 2 / 24 1 2 3 4 Positron emission Detected events Detectors and configuration Data acquisition Positron emission Positron
DEVIL PHYSICS THE BADDEST CLASS ON CAMPUS IB PHYSICS
 DEVIL PHYSICS THE BADDEST CLASS ON CAMPUS IB PHYSICS TSOKOS OPTION I-2 MEDICAL IMAGING Reading Activity Answers IB Assessment Statements Option I-2, Medical Imaging: X-Rays I.2.1. I.2.2. I.2.3. Define
DEVIL PHYSICS THE BADDEST CLASS ON CAMPUS IB PHYSICS TSOKOS OPTION I-2 MEDICAL IMAGING Reading Activity Answers IB Assessment Statements Option I-2, Medical Imaging: X-Rays I.2.1. I.2.2. I.2.3. Define
A simple non-iterative algorithm for 2-D tomography with unknown view angles
 A simple non-iterative algorithm for 2-D tomography with unknown view angles Andrew E Yagle Department of EECS, The University of Michigan, Ann Arbor, MI 4819-2122 1 Abstract Parallel-beam tomography in
A simple non-iterative algorithm for 2-D tomography with unknown view angles Andrew E Yagle Department of EECS, The University of Michigan, Ann Arbor, MI 4819-2122 1 Abstract Parallel-beam tomography in
Practice Final Solutions
 Practice Final Solutions Math 1, Fall 17 Problem 1. Find a parameterization for the given curve, including bounds on the parameter t. Part a) The ellipse in R whose major axis has endpoints, ) and 6, )
Practice Final Solutions Math 1, Fall 17 Problem 1. Find a parameterization for the given curve, including bounds on the parameter t. Part a) The ellipse in R whose major axis has endpoints, ) and 6, )
FFTs in Graphics and Vision. Homogenous Polynomials and Irreducible Representations
 FFTs in Graphics and Vision Homogenous Polynomials and Irreducible Representations 1 Outline The 2π Term in Assignment 1 Homogenous Polynomials Representations of Functions on the Unit-Circle Sub-Representations
FFTs in Graphics and Vision Homogenous Polynomials and Irreducible Representations 1 Outline The 2π Term in Assignment 1 Homogenous Polynomials Representations of Functions on the Unit-Circle Sub-Representations
Double Integrals. Advanced Calculus. Lecture 2 Dr. Lahcen Laayouni. Department of Mathematics and Statistics McGill University.
 Lecture Department of Mathematics and Statistics McGill University January 9, 7 Polar coordinates Change of variables formula Polar coordinates In polar coordinates, we have x = r cosθ, r = x + y y = r
Lecture Department of Mathematics and Statistics McGill University January 9, 7 Polar coordinates Change of variables formula Polar coordinates In polar coordinates, we have x = r cosθ, r = x + y y = r
BME I5000: Biomedical Imaging
 BME I5000: Biomedical Imaging Lecture 9 Magnetic Resonance Imaging (imaging) Lucas C. Parra, parra@ccny.cuny.edu Blackboard: http://cityonline.ccny.cuny.edu/ 1 Schedule 1. Introduction, Spatial Resolution,
BME I5000: Biomedical Imaging Lecture 9 Magnetic Resonance Imaging (imaging) Lucas C. Parra, parra@ccny.cuny.edu Blackboard: http://cityonline.ccny.cuny.edu/ 1 Schedule 1. Introduction, Spatial Resolution,
CT-PET calibration : physical principles and operating procedures F.Bonutti. Faustino Bonutti Ph.D. Medical Physics, Udine University Hospital.
 CT-PET calibration : physical principles and operating procedures Faustino Bonutti Ph.D. Medical Physics, Udine University Hospital Topics Introduction to PET physics F-18 production β + decay and annichilation
CT-PET calibration : physical principles and operating procedures Faustino Bonutti Ph.D. Medical Physics, Udine University Hospital Topics Introduction to PET physics F-18 production β + decay and annichilation
ENGI Multiple Integration Page 8-01
 ENGI 345 8. Multiple Integration Page 8-01 8. Multiple Integration This chapter provides only a very brief introduction to the major topic of multiple integration. Uses of multiple integration include
ENGI 345 8. Multiple Integration Page 8-01 8. Multiple Integration This chapter provides only a very brief introduction to the major topic of multiple integration. Uses of multiple integration include
Introduction to Biomedical Imaging
 Alejandro Frangi, PhD Computational Imaging Lab Department of Information & Communication Technology Pompeu Fabra University www.cilab.upf.edu MRI advantages Superior soft-tissue contrast Depends on among
Alejandro Frangi, PhD Computational Imaging Lab Department of Information & Communication Technology Pompeu Fabra University www.cilab.upf.edu MRI advantages Superior soft-tissue contrast Depends on among
University of Ljubljana Faculty of mathematics and physics Department of physics. Tomography. Mitja Eržen. August 6, Menthor: Dr.
 University of Ljubljana Faculty of mathematics and physics Department of physics Tomography Mitja Eržen August 6, 2009 Menthor: Dr. Matjaž Vencelj Abstract We ll describe some methods for medical imaging.i
University of Ljubljana Faculty of mathematics and physics Department of physics Tomography Mitja Eržen August 6, 2009 Menthor: Dr. Matjaž Vencelj Abstract We ll describe some methods for medical imaging.i
McGill University April Calculus 3. Tuesday April 29, 2014 Solutions
 McGill University April 4 Faculty of Science Final Examination Calculus 3 Math Tuesday April 9, 4 Solutions Problem (6 points) Let r(t) = (t, cos t, sin t). i. Find the velocity r (t) and the acceleration
McGill University April 4 Faculty of Science Final Examination Calculus 3 Math Tuesday April 9, 4 Solutions Problem (6 points) Let r(t) = (t, cos t, sin t). i. Find the velocity r (t) and the acceleration
Math 265H: Calculus III Practice Midterm II: Fall 2014
 Name: Section #: Math 65H: alculus III Practice Midterm II: Fall 14 Instructions: This exam has 7 problems. The number of points awarded for each question is indicated in the problem. Answer each question
Name: Section #: Math 65H: alculus III Practice Midterm II: Fall 14 Instructions: This exam has 7 problems. The number of points awarded for each question is indicated in the problem. Answer each question
Winter College on Optics: Trends in Laser Development and Multidisciplinary Applications to Science and Industry February 2013
 2443-27 Winter College on Optics: Trends in Laser Development and Multidisciplinary Applications to Science and Industry 4-15 February 2013 Data capture and tomographic reconstruction of phase microobjects
2443-27 Winter College on Optics: Trends in Laser Development and Multidisciplinary Applications to Science and Industry 4-15 February 2013 Data capture and tomographic reconstruction of phase microobjects
Dimensions = xyz dv. xyz dv as an iterated integral in rectangular coordinates.
 Math Show Your Work! Page of 8. () A rectangular box is to hold 6 cubic meters. The material used for the top and bottom of the box is twice as expensive per square meter than the material used for the
Math Show Your Work! Page of 8. () A rectangular box is to hold 6 cubic meters. The material used for the top and bottom of the box is twice as expensive per square meter than the material used for the
Copyright 2008, University of Chicago, Department of Physics. Gamma Cross-sections. NaI crystal (~2" dia) mounted on photo-multiplier tube
 mounted on photo-multiplier tube") Gamma Cross-sections 1. Goal We wish to measure absorption cross-sections for γ-rays for a range of gamma energies and absorber atomic number. 2. Equipment Pulse height analyzer Oscilloscope NaI crystal
Gamma Cross-sections 1. Goal We wish to measure absorption cross-sections for γ-rays for a range of gamma energies and absorber atomic number. 2. Equipment Pulse height analyzer Oscilloscope NaI crystal