Electric Machines. Leila Parsa Rensselaer Polytechnic Institute
|
|
|
- Lesley Greene
- 5 years ago
- Views:
Transcription
1 Elctc Machn la Paa Rnla Polytchnc Inttut 1
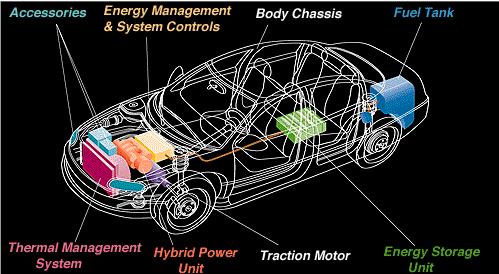
2 Hybd Vhcl

3 Elctc Shp Applcaton


4 4


5 Elctc Shp Pow Sytm 5


6 6

7 Populon Moto 19MW 7

8 Elctc Mnng Tuck On of th haul tuck fttd wth a pantogaph fo th tolly-at ytm, whch u lctc pow fom th man gd to mo th tuck up th tp pt amp. 8

9 Elctc Shol and Tuck Elctc hol load th bokn matal nto tuck fo tanpot fom th pt. Intal pt qupmnt ncludd hol wth 11 cubc yad buckt and 85 ton poducton tuck. Fo th 199, th mn contng t flt to 17 and 19 ton tuck. 9

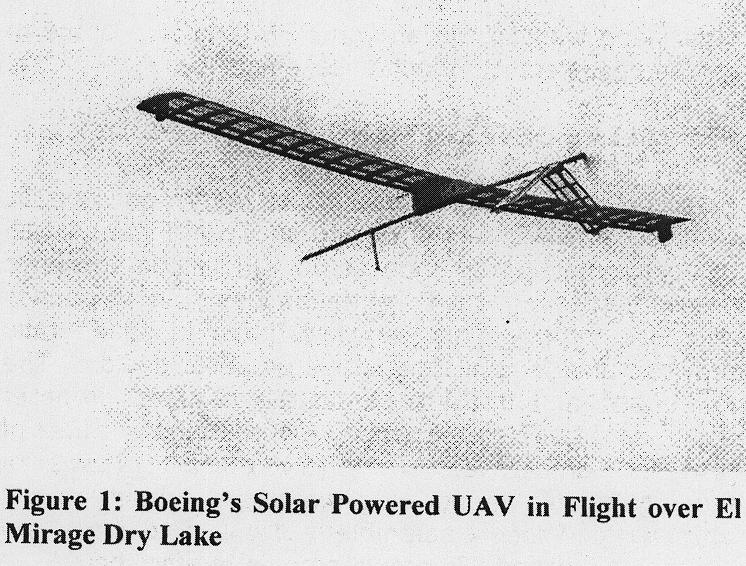
10 Unmannd Aal Vhcl 1

11 Mannd Aal Vhcl Sonx Acaft E-Flght Intat buhl dc moto ffcncy: 96% moto wght: 5 lb. flght tm: 1 h. moto pow: 1 hp. oltag: 7 Vdc 11
12 Rfnc Fam Thoy Intoducd by R.H. Pak n 199 to modl ynchonou machn 1
13 Th-Pha Tanfomaton to th Abtay Rfnc Fam f qd K f abc f f f q qd d f f abc f f f a b c f = oltag, cunt, o flux lnkag q = q-ax (quadatu ax) d = d-ax (dct ax) = zo qunc a = a-pha b = b-pha c = c-pha 1
14 14 Th Rfnc Fam Tanfomaton n n n co co co K = fnc fam pd (ad/c) = fnc fam poton (ad)
15 15 1 n co 1 n co 1 n co 1 K qd abc f K f 1 Th In Tanfomaton
16 Exampl: Th-Pha St of Voltag V co a V co b V co c t f f V - lctc fquncy (Hz) - lctc adan fquncy (ad/c) - lctcal poton (ad) - m Voltag (V) - pha hft (ad) 16
17 Tanfom to th Abtay Rfnc Fam K qd abc co co co Vco q d n n n Vco Vco 17
18 q-ax oltag co co co co co co q V ung th dntty, coxco ycox coy cox coy cox y q V Voltag n Abtay Rfnc Fam co d-ax oltag n co n co n co d V ung th dntty, n xcoyn x coy n x coy n x y d V n zo qunc oltag 1 co co co V 18
19 8 V, -pha, f = 6 Hz (8 V ln-to-ln m) 8 V V 1 V 1. Statonay fnc fam V co q V n d Numcal Exampl. Synchonou fnc fam q V V co d V n 19

20 Ax Sktch wth = q d V V co n
21 Ax Sktch wth = V co 17V q d V n 1

22 = and = o V co 147 V q V n 85V d
23 Commonly Ud Rfnc Fam Abtay,, fq fd f K Statonay fq, fd, f K Synchonou fq, fd, f K Roto fq, fd, f K compact notaton Not: In all fnc fam K qd abc f 1 f a f b f c K qd abc
24 Ral Pow n th q-d Rfnc Fam P n a a b b c c T a b c b abc abc a c T T T 1 n qd qd qd qd P K K K K K 1 T 1 K qq dd Pn 4
25 Rfnc Fam Tanfomaton Dlopd by R.H. Pak n 199 fo analy of ynchonou machn. Allow tatmnt of balancd th-pha ac ytm a two-pha dc ytm. Th lad to applcaton of clacal contol thoy Alo mplf contol quaton of om ytm 5
26 Tanfomng Ccut Elmnt: R- Exampl oltag quaton a R a p a b R b p b c R c p c not: p d dt flux lnkag quaton a a b b c c 6
27 Tanfom Flux nkag Equaton 1. Comp quaton abc abc. Tanfom quaton K abc K abc K abc qd qd. Expand quaton q q d d 7
28 Tanfom Voltag Equaton 1. Comp quaton abc R abc p abc. Tanfom quaton K KR K p abc abc abc 1 qd Rqd K p{ K qd } 1 1 Rqd K K pqd K p{ K } qd K K 1 I 8
29 9 co n co n co n } { 1 K p } { 1 K p K dq qd qd qd p R d dq q. Expand quaton d q q q p R q d d d p R p R
30 Equalnt Ccut q-ax d-ax zo qunc q R q p q d d R d p d q R p q q d d
31 1 abc abc abc p R dq qd qd qd p R q d dq Coupld Inducto oltag quaton
32 c b a m l m m m m l m m m m l c b a flux lnkag quaton Coupld Inducto abc abc abc abc K K qd qd K K 1
33 K K 1 l m l m l xpandd fom q d l m l m q d l
34 Tanfomaton of Ccut Elmnt Balancd th-pha ac ccut tanfomd to two-pha dc ccut (nglctng th zo qunc and aumng analy n th ynchonou fnc fam) Flux lnkag quaton fo nduct ccut w ud fo gnalty to oth ccut; ncludng lctc machn Couplng tm btwn th q- and d-ax ult fom th tanfomaton. Th wll lat b wd a back-mf tm whn obng lctc machny n th ynchonou fnc fam. 4
35 Balancd Stady-Stat Voltag V co t a b V cot c Vcot V a V V b c j V V V j j j j ~ V V a 5
36 Synchonou Rfnc Fam q-d Voltag Synchonou: = V V co q V V n d not: V V V q d 1 V d V q tan 6
37 Stady-Stat Calculaton (= ) tady-tat quaton V q RI q I d V d RI d I q 7
38 8 d q d q V V R R R I I 1 ol fo cunt d q d q I I R R V V tady-tat quaton n matx fom
39 Stady-Stat q-d Calculaton In th ynchonou fnc fam, th q-d ccut a uppld fom dc and th copondng dc oluton tady-tat (nducto tatd a hot-ccut, capacto tatd a opn-ccut) Can b ud to analyz tady-tat opaton of lctc machn Equaton can b lnazd about th dc opatng pont fo applcaton of contol thoy 9

40 PMSM Roto and Stato 4


41 Roto and Stato Dgn 41




42 Som PMSM Applcaton Elctc bk Elctc aplan Rmot opatd hcl All-tan hcl 4
43 Pmannt Magnt Moto D Pmannt magnt AC moto (PMAC) : qua-ctangula fd BDC Moto Snuodally fd PMSM BDC moto: Two pha a conductng at ach ntant of tm A low oluton poton no (Hall Sno) nough fo podng commutaton ntant Hgh toqu dnty compad to PMSM at low and mdum pd Commutaton toqu pulaton Th pfomanc dtoat at hgh pd PMSM : Poton nfomaton ndd at ach ntant of tm Mo adancd contol tchnqu wth fat tannt pon applcabl to th knd of d o th whol pd ang.


44 BDC Moto Back-EMF and pha cunt BDC Cunt Wafom
45 BDC Moto c b a c b a c b a c b a dt d M M M R R R ) ( 1 c c b b a a T B dt d J T T Equaton gonng th pha BDC moto: wh a, b, and c a tapzodal back- EMF. Th lctomagntc toqu xpd a: And, th ntacton of T wth th load toqu dtmn how th moto pd buld up:
46 Hgh Spd Opaton of BDC Moto Th BDC opaton abo atd pd bng pfomd by adanc angl tchnqu At a gn toqu o a gn pd, t dffcult to fnd th xact adancangl to b appld. At hgh pd th tato wndng nductanc' can cau th pha cunt to dat gnfcantly fom th dal ctangula wafom whch wll duc th toqu poducton at hgh pd
47 PMSM Tanfomaton fom tatonay fam of fnc to otatng fam of fnc Equaton gonng th pha PMSM moto: d q d q q d d dt ( ) q d d Toqu quaton: T P n m q q m d d q d d q dt q B V t t Elctomchancal moton quaton P/T T T J d dt B PMSM t
48 Hgh Spd Opaton of PMSM Th PMSM opaton abo atd pd bng pfomd by njctng ngat d (fld waknng) and condng cunt and oltag lmtaton: ( d ) ( q ) I atd ( m d d ) ( q q ) V ( atd ) Bad on th abo two lmt th amount of d ax cunt to b njctd known at any gn pd Pow d I q E q ψt Ba Spd Toqu Spd ψm d ψ
49 Pmannt Magnt Synchonou Machn (PMSM) wndng conncton moto contucton aum: 1. Round oto. Snuodal flux lnkag mq md m 49
50 Bac Magntc Equaton N N l A o B H N N dfn nductanc N flux lnkag and cunt a popotonal to B and H H N l B A N A 5
51 Bac Magntc Dfnton = MMF (A t) = luctanc (1/H) l = flux path lngth (m) A = co ctonal aa (m ) μ o = 4π*1-7 H/m pmablty of f pac μ = lat pmablty μ = 4 on, μ = tl Φ = magntc flux (Wb=V c) λ = Flux lnkag (V c) = nductanc (H=Ω c) B = flux dnty (V c/m ) H = magntc fld ntnty (A t/m) 51
52 Inductanc Tm cond a cunt n th a-pha wndng lf nductanc aa aa l m l m - tato lakag nductanc (H) - tato magntzng nductanc (H) mutual nductanc ab (dtmn th componnt of a du to b ) manng nductanc tm o 1 ab co 1 m m ab ac ba bc aa ca bb cb cc 1 m l m 5


53 Inductanc Rlatd to Machn Dmnon m N g l 5
54 54 m am ' n n m bm ' n m cm ' Magnt Flux magnt flux lnkng th a-pha magnt flux lnkng th b- and c-pha
55 machn col aabl PMSM Equaton a a p a b b p b c c p c flux lnkag 1 1 a a l m m m n 1 1 b m l m m b m' n 1 1 m m l m n c c 55
56 Rducd Flux nkag Equaton 1 1 a l m a m b m c m 1 ' ' n n l m a m a b c m fo a wy conncton, a + b + c = n ' a a m wh = l + (/) m co p ' a a a m p a a a a - a-pha back-mf 56
57 machn aabl Col Voltag Equaton a a p a b b p b c c p c oto fnc fam, q-d aabl p q q d q p d d q d p 57
58 1 1 a a l m m m n 1 1 b m l m m b m n 1 1 m m l m n c c comp quaton Flux nkag Expon abc abc abcm 58
59 Tanfom Flux nkag K K K abc abc abcm 1 K K qd qd qd m nductanc K K 1 l m l m l dfn l m magnt flux lnkag qd m K abcm m 59
60 Flux nkag Equaton n th Roto Rfnc Fam q q d d ' m l compad to a-b-c aabl: no coupld tm and no oto poton dpndnc q q d d m' l 6
61 Equalnt Ccut Modl ubttut flux lnkag quaton nto oltag quaton q q p q ' d m d d p d q q-ax ccut d-ax ccut 61
62 Gnal Machn wth P Pol P m P m m - lctcal oto poton (ad) - mchancal oto poton (ad) - lctcal oto pd (ad/c) m - mchancal oto pd (ad/c) 6
63 6 q m d q q m q d out ' ' P m out T P T P out P P T q m ' P T Toqu Equaton fom Pow
64 Toqu Contol n q-d- aabl T P m' q toqu contol 64
65 Mchancal Equaton T J d m dt T B m m T Jp m alo m p m T - lctcal toqu (N m) B m - fcton contant (Kg m /c) J - total nta (Kg m ) m - mchancal pd (ad/c) T - load toqu (N m) m - mchancal oto poton (ad) 65
66 PMSM Modl Th PMSM can b modld wth a faly taghtfowad tanc, nductanc, and back-mf tm n ach pha. If th zo qunc cunt can b nglctd, th q-d modl pnt th machn a a two-pha ccut wth dc quantt n th tady-tat. Th two ccut a coupld by back-mf tm. Th toqu quaton n th q-d modl mplfd compad to th machn-aabl (a-b-c) modl. Th popty wll b ud fo dlopng a toqu contol. Th q-d modl alo lad to mpl contol n oth ytm uch a nducton machn, act ctf, and act flt. 66
67 PMSM Stady-Stat Equaton ound oto machn q d contant q d q d u notaton V q V d I q I d d wth p dt V q I q I ' d m V T d I d P m'i q I q B m m T 67
68 68 olng fo oltag ' I I V V m d q d q d m q d q V ' V I I olng fo cunt ' d m q q V V I d m q d V ' V I Stady-Stat Soluton
69 PMSM wth D (Stady-Stat) nt oltag a V b V c V V V q d V V co co co co n ultng cunt a I co b I co c I co I I q d I I co n V V V 1 q d tan 1 V Vq d I I I 1 q d 1 I d I q tan 69
70 Idal D Calculaton wth = moto paamt P.9 opatng condton 11.4 mh ' m.156 V V 9 V ad m 6 RPM P m m 68 ad 68 ad q- and d-ax oltag and cunt V q V co V d V n V q V d 17V V I q I d 1 V q V d ' m I q 1.4A I d.51a 1 I I q I d I.7A I.79A atan I d I q 68dg P T ' m I q T.Nm 7
71 PMSM Stady-Sat Exampl = 71
72 Idal D Calculaton wth = put all cunt n th q-ax dg I q I co I q.79a I d I n I d A V q I q ' m V d I d V q 19V V d 7.1V 1 V V q V d V 79.4V V d atan V 14dg q P T ' m I q T.89Nm V 11V 7
73 PMSM Stady-Sat Exampl wth = 7
74
75 Rfnc Fam Thoy A th-pha nduct load connctd to a th-pha oltag ouc. Th nductanc o 1mH and th ouc ha paamt of V 1V, 45, and f 6 Hz (wh t f t ). Calculat th tady-tat q- and d-ax oltag and cunt n th ynchonou fnc fam. Sktch th quantt and th otatng oltag and cunt cto on th gaph blow. Sktch th q- and d-ax oltag n th ynchonou fnc fam fo two cycl of.
76 Pmannt-Magnt Ac D A PMAC machn wth th paamt P 4 1 5mH.95V opatng wth nglgbl fcton and wthout load. Gn that th appld oltag and pha angl V 7V o Dtmn th tady-tat no-load mchancal oto pd. At no-load pd, comput th lctcal nput pow, mchancal output pow, and pow lo. Comput th q- and d-ax oltag and cunt. Sktch th quantt and th otatng oltag and cunt cto on th gaph blow. ' m I th machn opatng wth a ladng o laggng pow facto?
Applications of Lagrange Equations
 Applcaton of agang Euaton Ca Stuy : Elctc Ccut ng th agang uaton of oton, vlop th athatcal ol fo th ccut hown n Fgu.Sulat th ult by SIMI. Th ccuty paat a: 0.0 H, 0.00 H, 0.00 H, C 0.0 F, C 0. F, 0 Ω, Ω
Applcaton of agang Euaton Ca Stuy : Elctc Ccut ng th agang uaton of oton, vlop th athatcal ol fo th ccut hown n Fgu.Sulat th ult by SIMI. Th ccuty paat a: 0.0 H, 0.00 H, 0.00 H, C 0.0 F, C 0. F, 0 Ω, Ω
 Xa.Ktlyn@nam.u ERASMUS MUNDUS MASTER STEPS 0&0//0 Intoucton to Vcto Contol of Pmannt Magnt Synchonou Machn ung Engtc Macocopc Rpntaton Xa.Ktlyn@nam.u Aocat Pofo n Elctcal Engnng PhD - HR At t Mét PaTch
Xa.Ktlyn@nam.u ERASMUS MUNDUS MASTER STEPS 0&0//0 Intoucton to Vcto Contol of Pmannt Magnt Synchonou Machn ung Engtc Macocopc Rpntaton Xa.Ktlyn@nam.u Aocat Pofo n Elctcal Engnng PhD - HR At t Mét PaTch
Modeling and implementation of vector control for Induction motor Drive
 Intnatonal Jounal of Engnng Rach and Gnal Scnc Volum 3, Iu 2, Mach-Apl, 215 Modlng and mplmntaton of cto contol fo Inducton moto D K.Ramh 1,Ch.Ra Kuma 2,P.Bala Mual 3 1 P.G.Studnt,Dpt of EEE,AITAM Engnng
Intnatonal Jounal of Engnng Rach and Gnal Scnc Volum 3, Iu 2, Mach-Apl, 215 Modlng and mplmntaton of cto contol fo Inducton moto D K.Ramh 1,Ch.Ra Kuma 2,P.Bala Mual 3 1 P.G.Studnt,Dpt of EEE,AITAM Engnng
Evaluation of Back-EMF Estimators for Sensorless Control of Permanent Magnet Synchronous Motors
 Ealuaton of Back-EMF Etmato fo Snol Contol of JPE -4- http://x.o.og/.63/jpe...4. Ealuaton of Back-EMF Etmato fo Snol Contol of Pmannt Magnt Synchonou Moto Kwang-Woon an Jung-Ik Ha Dpt. of Elctonc Eng.,
Ealuaton of Back-EMF Etmato fo Snol Contol of JPE -4- http://x.o.og/.63/jpe...4. Ealuaton of Back-EMF Etmato fo Snol Contol of Pmannt Magnt Synchonou Moto Kwang-Woon an Jung-Ik Ha Dpt. of Elctonc Eng.,
PF nce. Conferen. is, FRANC. ectronics Pari. ber 6-10, 2. ustrial Ele. Novemb. EEE Indu
 Confn nc s, FRANC CE ctoncs 006 Pa ustal El b 6-0, EEE Indu Nomb 3 nd I Spd and Poston Estmaton fo PM Synchonous Moto usng Slf-Compnsatd t d Back-EMF k Obss Maco TURSINI, Robto PETRELLA, Alssa SCAFATI
Confn nc s, FRANC CE ctoncs 006 Pa ustal El b 6-0, EEE Indu Nomb 3 nd I Spd and Poston Estmaton fo PM Synchonous Moto usng Slf-Compnsatd t d Back-EMF k Obss Maco TURSINI, Robto PETRELLA, Alssa SCAFATI
J. Milli Monfared K. Abbaszadeh E. Fallah Assistant Professor P.H.D Student P.H.D Student
 olng an Smulaton of Dual h Pha Inucton achn n Fault conton wo Pha cut off) an Popo A Nw Vcto Contol Appoach fo oqu Ocllaton Ructon J. ll onfa K. Abbazah E. Fallah Atant Pofo P.H.D Stunt P.H.D Stunt Amkab
olng an Smulaton of Dual h Pha Inucton achn n Fault conton wo Pha cut off) an Popo A Nw Vcto Contol Appoach fo oqu Ocllaton Ructon J. ll onfa K. Abbazah E. Fallah Atant Pofo P.H.D Stunt P.H.D Stunt Amkab
AI BASED VECTOR CONTROL OF INDUCTION MOTOR
 AI BASED VECTOR CONTROL OF INDUCTION MOTOR K.Padukola Elctcal and lctonc ngnng S Vdya collg of Engnng and Tchnology, Inda padukola@gmal.com Abtact- In modn hgh pfomanc ac dv uually th dct vcto contol chm
AI BASED VECTOR CONTROL OF INDUCTION MOTOR K.Padukola Elctcal and lctonc ngnng S Vdya collg of Engnng and Tchnology, Inda padukola@gmal.com Abtact- In modn hgh pfomanc ac dv uually th dct vcto contol chm
Loss Minimization Control for Doubly-Fed Induction Generators in Variable Speed Wind Turbines
 Th 33d Annual Confnc of th IEEE Indutal Elctonc Soct (IECON) Nov. 5-8, 7, Tap, Tawan o Mnmzaton Contol fo Doubl-Fd Inducton Gnato n Vaabl Spd Wnd Tubn Ahmd G. Abo- Khall, Hong-Guk Pak, Dong-Choon Dpt.
Th 33d Annual Confnc of th IEEE Indutal Elctonc Soct (IECON) Nov. 5-8, 7, Tap, Tawan o Mnmzaton Contol fo Doubl-Fd Inducton Gnato n Vaabl Spd Wnd Tubn Ahmd G. Abo- Khall, Hong-Guk Pak, Dong-Choon Dpt.
TRANSIENT PROCESSES AND DYNAMIC OF VARIABLE SPEED PUMP STORAGE UNIT
 Ol Shal, 203, Vol. 30, No. 2S, pp. 244 256 ISSN 020889X do: 0.376/ol.203.2S.05 203 Etonan Acadmy ublh TRANSIENT ROCESSES AND DYNAMIC OF VARIABLE SEED UM STORAGE UNIT RIMANTAS RANAS DEKSNYS *, DARIUS ALIŠAUSKAS
Ol Shal, 203, Vol. 30, No. 2S, pp. 244 256 ISSN 020889X do: 0.376/ol.203.2S.05 203 Etonan Acadmy ublh TRANSIENT ROCESSES AND DYNAMIC OF VARIABLE SEED UM STORAGE UNIT RIMANTAS RANAS DEKSNYS *, DARIUS ALIŠAUSKAS
Multi-linear Systems and Invariant Theory. in the Context of Computer Vision and Graphics. Class 4: Mutli-View 3D-from-2D. CS329 Stanford University
 Mult-lna Sytm and Invaant hoy n th Contxt of Comut Von and Gahc Cla 4: Mutl-Vw 3D-fom-D CS39 Stanfod Unvty Amnon Shahua Cla 4 Matal W Wll Cov oday Eola Gomty and Fundamntal Matx h lan+aallax modl and latv
Mult-lna Sytm and Invaant hoy n th Contxt of Comut Von and Gahc Cla 4: Mutl-Vw 3D-fom-D CS39 Stanfod Unvty Amnon Shahua Cla 4 Matal W Wll Cov oday Eola Gomty and Fundamntal Matx h lan+aallax modl and latv
Period vs. Length of a Pendulum
 Gaphcal Mtho n Phc Gaph Intptaton an Lnazaton Pat 1: Gaphng Tchnqu In Phc w u a vat of tool nclung wo, quaton, an gaph to mak mol of th moton of objct an th ntacton btwn objct n a tm. Gaph a on of th bt
Gaphcal Mtho n Phc Gaph Intptaton an Lnazaton Pat 1: Gaphng Tchnqu In Phc w u a vat of tool nclung wo, quaton, an gaph to mak mol of th moton of objct an th ntacton btwn objct n a tm. Gaph a on of th bt
Analysis and control of dual stator winding induction motor
 ARCHIVES OF EECRICA ENGINEERING VO. 61(3), pp. 41-438 (01) DOI 10.478/v10171-01-0033-z Analy and contol of dual tato wndng nducton oto KRZYSZOF PIEŃKOWSKI Inttut of Elctcal Machn, Dv and Maunt Woclaw Unvty
ARCHIVES OF EECRICA ENGINEERING VO. 61(3), pp. 41-438 (01) DOI 10.478/v10171-01-0033-z Analy and contol of dual tato wndng nducton oto KRZYSZOF PIEŃKOWSKI Inttut of Elctcal Machn, Dv and Maunt Woclaw Unvty
Signal Circuit and Transistor Small-Signal Model
 Snal cut an anto Sall-Snal Mol Lctu not: Sc. 5 Sa & Sth 6 th E: Sc. 5.5 & 6.7 Sa & Sth 5 th E: Sc. 4.6 & 5.6 F. Najaba EE65 Wnt 0 anto pl lopnt Ba & Snal Ba Snal only Ba Snal - Ba? MOS... : : S... MOS...
Snal cut an anto Sall-Snal Mol Lctu not: Sc. 5 Sa & Sth 6 th E: Sc. 5.5 & 6.7 Sa & Sth 5 th E: Sc. 4.6 & 5.6 F. Najaba EE65 Wnt 0 anto pl lopnt Ba & Snal Ba Snal only Ba Snal - Ba? MOS... : : S... MOS...
Sliding Mode Observer Based Sensorless Control of BLDC Motor under DTC Scheme
 ISSN (Onlin): 2278 8875 Intnational Jounal of Adancd Rach in Elctical, Elctonic and Intumntation Engining (An ISO 3297: 2007 Ctifid Oganization) Vol. 2, Iu 11, Nomb 2013 Sliding Mod Ob Bad Snol Contol
ISSN (Onlin): 2278 8875 Intnational Jounal of Adancd Rach in Elctical, Elctonic and Intumntation Engining (An ISO 3297: 2007 Ctifid Oganization) Vol. 2, Iu 11, Nomb 2013 Sliding Mod Ob Bad Snol Contol
Studying the Steady State Performance Characteristics of Induction Motor with Field Oriented Control Comparing to Scalar Control
 EJERS, Euopan Jounal of Engining Rach and Scinc Studying th Stady Stat fomanc Chaactitic of nduction Moto with Fild Ointd Contol Compaing to Scala Contol Hamdy Mohamd Soliman Abtact Fild ointd contol i
EJERS, Euopan Jounal of Engining Rach and Scinc Studying th Stady Stat fomanc Chaactitic of nduction Moto with Fild Ointd Contol Compaing to Scala Contol Hamdy Mohamd Soliman Abtact Fild ointd contol i
Load Equations. So let s look at a single machine connected to an infinite bus, as illustrated in Fig. 1 below.
 oa Euatons Thoughout all of chapt 4, ou focus s on th machn tslf, thfo w wll only pfom a y smpl tatmnt of th ntwok n o to s a complt mol. W o that h, but alz that w wll tun to ths ssu n Chapt 9. So lt
oa Euatons Thoughout all of chapt 4, ou focus s on th machn tslf, thfo w wll only pfom a y smpl tatmnt of th ntwok n o to s a complt mol. W o that h, but alz that w wll tun to ths ssu n Chapt 9. So lt
Massachusetts Institute of Technology Introduction to Plasma Physics
 Massachustts Insttut of Tchnology Intoducton to Plasma Physcs NAME 6.65J,8.63J,.6J R. Pak Dcmb 5 Fnal Eam :3-4:3 PM NOTES: Th a 8 pags to th am, plus on fomula sht. Mak su that you copy s complt. Each
Massachustts Insttut of Tchnology Intoducton to Plasma Physcs NAME 6.65J,8.63J,.6J R. Pak Dcmb 5 Fnal Eam :3-4:3 PM NOTES: Th a 8 pags to th am, plus on fomula sht. Mak su that you copy s complt. Each
Robustness Evaluation of SMO in Sensorless Control of BLDC Motor under DTC Scheme
 Robutn Ealuation of SMO in Snol Contol of BDC Moto und DTC Schm Giija P.., Studnt Mmb, IEEE, and Pinc A., Mmb, IEEE Abtact-- Dict Toqu Contol (DTC i a mthod to contol th toqu in aiabl fquncy di. Thi pap
Robutn Ealuation of SMO in Snol Contol of BDC Moto und DTC Schm Giija P.., Studnt Mmb, IEEE, and Pinc A., Mmb, IEEE Abtact-- Dict Toqu Contol (DTC i a mthod to contol th toqu in aiabl fquncy di. Thi pap
SENSORLESS DIRECT FIELD ORIENTED CONTROL OF INDUCTION MACHINE BY FLUX AND SPEED ESTIMATION USING MODEL REFERENCE ADAPTIVE SYSTEM
 SENSORESS DIRECT FIED ORIENTED CONTRO OF INDUCTION MACHINE BY FUX AND SPEED ESTIMATION USING MODE REFERENCE ADAPTIVE SYSTEM A THESIS SUBMITTED TO THE GRADUATE SCHOO OF NATURA AND APPIED SCIENCES OF THE
SENSORESS DIRECT FIED ORIENTED CONTRO OF INDUCTION MACHINE BY FUX AND SPEED ESTIMATION USING MODE REFERENCE ADAPTIVE SYSTEM A THESIS SUBMITTED TO THE GRADUATE SCHOO OF NATURA AND APPIED SCIENCES OF THE
) 3. 3 i. 2π ) 3. sin(
 3. 3 i. 2π ) 3. sin(") Fl Ont Contol of An Inucton Moto Sp Snol wth Cunt Vcto Contoll, ct-quaatu Cunt Copnato an Full O Obv In ct-quaatu Ax Rwan Gunawan 1,F Yuva, Zuhal A. Ka 1 Dpatnt Elctcal Engnng, Unvty of Inona, Dpok Mb
Fl Ont Contol of An Inucton Moto Sp Snol wth Cunt Vcto Contoll, ct-quaatu Cunt Copnato an Full O Obv In ct-quaatu Ax Rwan Gunawan 1,F Yuva, Zuhal A. Ka 1 Dpatnt Elctcal Engnng, Unvty of Inona, Dpok Mb
MODELING AND CONTROL OF DOUBLY FED INDUCTION GENERATOR FOR WIND POWER
 MODEING AND CONTRO O DOUBY ED INDUCTION GENERATOR OR WIND POWER Tak Mdall Maaud 1, Studnt M, IEEE and P.K. Sn, llow IEEE Coloado School of Mn, Don of Engnng, Goldn, Coloado 841 Atact- Wth ncad pntaton
MODEING AND CONTRO O DOUBY ED INDUCTION GENERATOR OR WIND POWER Tak Mdall Maaud 1, Studnt M, IEEE and P.K. Sn, llow IEEE Coloado School of Mn, Don of Engnng, Goldn, Coloado 841 Atact- Wth ncad pntaton
Induction Motor Speed Control using Fuzzy Logic Controller
 Wold cadmy of Scnc, Engnng and Tchnology Intnatonal Jounal of Elctcal and Comput Engnng Vol:, No:, 008 Inducton Moto Spd Contol ung Fuzzy Logc Contoll V. Chta, and R. S. Pabhaka Intnatonal Scnc Indx, Elctcal
Wold cadmy of Scnc, Engnng and Tchnology Intnatonal Jounal of Elctcal and Comput Engnng Vol:, No:, 008 Inducton Moto Spd Contol ung Fuzzy Logc Contoll V. Chta, and R. S. Pabhaka Intnatonal Scnc Indx, Elctcal
Lecture Set 6 Brushless DC Machines
 Lectue Set 6 Bushless DC Machines S.D. Sudhoff Sping 2018 Reading Chapte 8, Electomechanical Motion Devices, 2 nd Edition 2 A Bushless DC Machine 3 Sample Applications Low Powe: Disk dive motos Medium
Lectue Set 6 Bushless DC Machines S.D. Sudhoff Sping 2018 Reading Chapte 8, Electomechanical Motion Devices, 2 nd Edition 2 A Bushless DC Machine 3 Sample Applications Low Powe: Disk dive motos Medium
Speed Control of Direct Torque Controlled Induction Motor By using PI, Anti-Windup PI and Fuzzy Logic Controller
 Intnatonal Jounal of Intllgnt Sytm and Applcaton n Engnng Advancd Tchnology and Scnc ISSN:7-7997-799 www.atcnc.og/ijisae Ognal Rach Pap Spd Contol of Dct Toqu Contolld Inducton Moto By ung, Ant-Wndup and
Intnatonal Jounal of Intllgnt Sytm and Applcaton n Engnng Advancd Tchnology and Scnc ISSN:7-7997-799 www.atcnc.og/ijisae Ognal Rach Pap Spd Contol of Dct Toqu Contolld Inducton Moto By ung, Ant-Wndup and
5- Scattering Stationary States
 Lctu 19 Pyscs Dpatmnt Yamou Unvsty 1163 Ibd Jodan Pys. 441: Nucla Pyscs 1 Pobablty Cunts D. Ndal Esadat ttp://ctaps.yu.du.jo/pyscs/couss/pys641/lc5-3 5- Scattng Statonay Stats Rfnc: Paagaps B and C Quantum
Lctu 19 Pyscs Dpatmnt Yamou Unvsty 1163 Ibd Jodan Pys. 441: Nucla Pyscs 1 Pobablty Cunts D. Ndal Esadat ttp://ctaps.yu.du.jo/pyscs/couss/pys641/lc5-3 5- Scattng Statonay Stats Rfnc: Paagaps B and C Quantum
Dynamic Modelling and Simulation of Five Phase Induction Motor
 ISSN (Pnt : 30 3765 ISSN (Onln: 78 8875 Intnatonal Jounal of Advancd Rsach n Elctcal, Elctoncs and Instuntaton Engnng (An ISO 397: 007 Ctfd Oganzaton ol. 4, Issu 4, Apl 05 Dynac Modllng and Sulaton of
ISSN (Pnt : 30 3765 ISSN (Onln: 78 8875 Intnatonal Jounal of Advancd Rsach n Elctcal, Elctoncs and Instuntaton Engnng (An ISO 397: 007 Ctfd Oganzaton ol. 4, Issu 4, Apl 05 Dynac Modllng and Sulaton of
Ch. 9 Common Emitter Amplifier
 Ch. 9 Common mttr mplfr Common mttr mplfr nput and put oltags ar 180 o -of-phas, whl th nput and put currnts ar n-phas wth th nput oltag. Output oltag ( V ) V V V C CC C C C C and V C ar -of-phas 10 μ
Ch. 9 Common mttr mplfr Common mttr mplfr nput and put oltags ar 180 o -of-phas, whl th nput and put currnts ar n-phas wth th nput oltag. Output oltag ( V ) V V V C CC C C C C and V C ar -of-phas 10 μ
References. Basic structure. Power Generator Technologies for Wind Turbine. Synchronous Machines (SM)
") Gnato chnologi fo Wind ubin Mhdad Ghandhai mhdad@kth. Rfnc 1. Wind Plant, ABB, chnical Alication Pa No.13.. WECC Wind Plant Dynamic Modling Guid, WECC Rnwabl Engy Modling ak Foc. 3. Wind ubin Plant Caabiliti
Gnato chnologi fo Wind ubin Mhdad Ghandhai mhdad@kth. Rfnc 1. Wind Plant, ABB, chnical Alication Pa No.13.. WECC Wind Plant Dynamic Modling Guid, WECC Rnwabl Engy Modling ak Foc. 3. Wind ubin Plant Caabiliti
Lecture 2: Frequency domain analysis, Phasors. Announcements
 EECS 5 SPRING 24, ctu ctu 2: Fquncy domain analyi, Phao EECS 5 Fall 24, ctu 2 Announcmnt Th cou wb it i http://int.c.bkly.du/~5 Today dicuion ction will mt Th Wdnday dicuion ction will mo to Tuday, 5:-6:,
EECS 5 SPRING 24, ctu ctu 2: Fquncy domain analyi, Phao EECS 5 Fall 24, ctu 2 Announcmnt Th cou wb it i http://int.c.bkly.du/~5 Today dicuion ction will mt Th Wdnday dicuion ction will mo to Tuday, 5:-6:,
MECH321 Dynamics of Engineering System Week 4 (Chapter 6)
") MH3 Dynamc of ngnrng Sytm Wk 4 (haptr 6). Bac lctrc crcut thor. Mathmatcal Modlng of Pav rcut 3. ompl mpdanc Approach 4. Mchancal lctrcal analogy 5. Modllng of Actv rcut: Opratonal Amplfr rcut Bac lctrc
MH3 Dynamc of ngnrng Sytm Wk 4 (haptr 6). Bac lctrc crcut thor. Mathmatcal Modlng of Pav rcut 3. ompl mpdanc Approach 4. Mchancal lctrcal analogy 5. Modllng of Actv rcut: Opratonal Amplfr rcut Bac lctrc
Diffraction. Diffraction: general Fresnel vs. Fraunhofer diffraction Several coherent oscillators Single-slit diffraction. Phys 322 Lecture 28
 Chapt 10 Phys 3 Lctu 8 Dffacton Dffacton: gnal Fsnl vs. Faunhof dffacton Sval cohnt oscllatos Sngl-slt dffacton Dffacton Gmald, 1600s: dffacto, dvaton of lght fom lna popagaton Dffacton s a consqunc of
Chapt 10 Phys 3 Lctu 8 Dffacton Dffacton: gnal Fsnl vs. Faunhof dffacton Sval cohnt oscllatos Sngl-slt dffacton Dffacton Gmald, 1600s: dffacto, dvaton of lght fom lna popagaton Dffacton s a consqunc of
ME 200 Thermodynamics I Spring 2014 Examination 3 Thu 4/10/14 6:30 7:30 PM WTHR 200, CL50 224, PHY 112 LAST NAME FIRST NAME
 M 00 hrodynac Sprng 014 xanaton 3 hu 4/10/14 6:30 7:30 PM WHR 00, CL50 4, PHY 11 Crcl your dvon: PHY 11 WHR 00 WHR 00 CL50 4 CL50 4 PHY 11 7:30 Joglkar 9:30 Wagrn 10:30 Gor 1:30 Chn :30 Woodland 4:30 Srcar
M 00 hrodynac Sprng 014 xanaton 3 hu 4/10/14 6:30 7:30 PM WHR 00, CL50 4, PHY 11 Crcl your dvon: PHY 11 WHR 00 WHR 00 CL50 4 CL50 4 PHY 11 7:30 Joglkar 9:30 Wagrn 10:30 Gor 1:30 Chn :30 Woodland 4:30 Srcar
Tutorial 5 Drive dynamics & control
 UNIVERSITY OF NEW SOUTH WALES Electic Dive Sytem School o Electical Engineeing & Telecommunication ELEC463 Electic Dive Sytem Tutoial 5 Dive dynamic & contol. The ollowing paamete ae known o two high peomance
UNIVERSITY OF NEW SOUTH WALES Electic Dive Sytem School o Electical Engineeing & Telecommunication ELEC463 Electic Dive Sytem Tutoial 5 Dive dynamic & contol. The ollowing paamete ae known o two high peomance
If we cannot accept your contribution in your preferred presentation mode, would you still be prepared to present in the alternative mode (tick one):
:") Pap Submon Fom Nam of Pntng Autho Ahmt Bd Öz Add )ÕUDW hqlyhuvlwhvl 0 KHQGLVOLN )DN OWHVL %LOJLVD\DU 0 KHQGLVOL L (OD]Õ 7 UNL\H Phon (+904242370000 (5292) cp: 05333303642) Fax (+90424 2383787) Oth autho:
Pap Submon Fom Nam of Pntng Autho Ahmt Bd Öz Add )ÕUDW hqlyhuvlwhvl 0 KHQGLVOLN )DN OWHVL %LOJLVD\DU 0 KHQGLVOL L (OD]Õ 7 UNL\H Phon (+904242370000 (5292) cp: 05333303642) Fax (+90424 2383787) Oth autho:
Diffraction. Diffraction: general Fresnel vs. Fraunhofer diffraction Several coherent oscillators Single-slit diffraction. Phys 322 Lecture 28
 Chapt 10 Phys 3 Lctu 8 Dffacton Dffacton: gnal Fsnl vs. Faunhof dffacton Sval cohnt oscllatos Sngl-slt dffacton Dffacton Gmald, 1600s: dffacto, dvaton of lght fom lna popagaton Dffacton s a consqunc of
Chapt 10 Phys 3 Lctu 8 Dffacton Dffacton: gnal Fsnl vs. Faunhof dffacton Sval cohnt oscllatos Sngl-slt dffacton Dffacton Gmald, 1600s: dffacto, dvaton of lght fom lna popagaton Dffacton s a consqunc of
Switching FOC Method for Vector Control of Single-Phase Induction Motor Drives
 Intnatonal Jounal of Elctcal an Comput Engnng (IJECE) Vol. 6, No., Apl 16, pp. 474~483 ISSN: 88-878, DOI: 1.11591/jc.6.9146 474 Swtchng FOC tho fo Vcto Contol of Sngl-Phas Inucton oto Ds ohamma Jannat*,
Intnatonal Jounal of Elctcal an Comput Engnng (IJECE) Vol. 6, No., Apl 16, pp. 474~483 ISSN: 88-878, DOI: 1.11591/jc.6.9146 474 Swtchng FOC tho fo Vcto Contol of Sngl-Phas Inucton oto Ds ohamma Jannat*,
Systemic design and modelling of a coiled rotor synchronous motor dedicated to electric traction
 mcan Jounal of Elctcal Pow an Engy Sytm 5; 4(-): -7 Publh onln Novmb 5, 4 (htt://www.cncublhnggou.com/j/) o:.648/j...54. ISSN: 36-9X (Pnt); ISSN: 36-9 (Onln) Sytmc gn an mollng of a col oto ynchonou moto
mcan Jounal of Elctcal Pow an Engy Sytm 5; 4(-): -7 Publh onln Novmb 5, 4 (htt://www.cncublhnggou.com/j/) o:.648/j...54. ISSN: 36-9X (Pnt); ISSN: 36-9 (Onln) Sytmc gn an mollng of a col oto ynchonou moto
Simulation of Indirect Vector Controlled Induction Motor Drive
 Kulaj Kau, SSSR Saathbabu Duvvu and Shakt Sngh 1 Elctcal and Elctoncs Engnng Dptt., LPU, Jallandha, Punjab, Inda 2 Elctcal and Inst. Engnng Dptt., Thapa Unvsty, Patala, Punjab, Inda 3 Elctcal and Inst.
Kulaj Kau, SSSR Saathbabu Duvvu and Shakt Sngh 1 Elctcal and Elctoncs Engnng Dptt., LPU, Jallandha, Punjab, Inda 2 Elctcal and Inst. Engnng Dptt., Thapa Unvsty, Patala, Punjab, Inda 3 Elctcal and Inst.
MODELING AND SIMULATION OF SENSORLESS CONTROL OF PMSM WITH LUENBERGER ROTOR POSITION OBSERVER AND SUI PID CONTROLLER
 Jounal of Elctcal Engnng www.j.o MODEING AND SIMUAION OF SENSORESS CONRO OF PMSM WIH UENBERGER ROOR POSIION OBSERVER AND SUI PID CONROER GHADA A. ABDE AZIZ, MOHAMED. I. ABU E- SEBAH, Elctonc Rsach Insttut,
Jounal of Elctcal Engnng www.j.o MODEING AND SIMUAION OF SENSORESS CONRO OF PMSM WIH UENBERGER ROOR POSIION OBSERVER AND SUI PID CONROER GHADA A. ABDE AZIZ, MOHAMED. I. ABU E- SEBAH, Elctonc Rsach Insttut,
24 th International Conference on Electricity Distribution Glasgow, June Paper 0045 ABSTRACT INTRODUCTION
 4 th ntnatonal Confnc on Elctcty Dtbuton Glagow, 1-15 Jun 017 Pap 0045 EALUATNG NOSE AND DC OFFSET DUE TO NTER-HARMONCS AND SUPRA- HARMONCS CAUSED BY BACK TO BACK CONERTER OF (DFG GENERATOR N AC DSTRBUTON
4 th ntnatonal Confnc on Elctcty Dtbuton Glagow, 1-15 Jun 017 Pap 0045 EALUATNG NOSE AND DC OFFSET DUE TO NTER-HARMONCS AND SUPRA- HARMONCS CAUSED BY BACK TO BACK CONERTER OF (DFG GENERATOR N AC DSTRBUTON
EE595S: Class Lecture Notes Chapter 2* / QD Models for Permanent Magnet Synchronous Machines
 EE595S: Class ectue Notes Chapte * / QD Models fo Peanent Magnet Synchonous Machines S.D. Sudhoff Fall 5 *Analysis and Design of Peanent Magnet Synchonous Machines S.D. Sudhoff, S.P. Pekaek B. Fahii .1
EE595S: Class ectue Notes Chapte * / QD Models fo Peanent Magnet Synchonous Machines S.D. Sudhoff Fall 5 *Analysis and Design of Peanent Magnet Synchonous Machines S.D. Sudhoff, S.P. Pekaek B. Fahii .1
Novel Axial Flux Brushless Resolver Analysis and Optimization using 3D Finite Element and D-Q Model Method
 Novl Axal Flux Buh Rolv Analy an Optmzaton ung 3D Fnt Elmnt an D-Q Mol Mtho F. Tootoonchan*, K. Aazah* an M. Al* Atact: Rolv a wly u n lctc vn ytm pcally n hgh pcon vomchanm. Both ncapulat an pancak olv
Novl Axal Flux Buh Rolv Analy an Optmzaton ung 3D Fnt Elmnt an D-Q Mol Mtho F. Tootoonchan*, K. Aazah* an M. Al* Atact: Rolv a wly u n lctc vn ytm pcally n hgh pcon vomchanm. Both ncapulat an pancak olv
Unit 3: Transistor at Low Frequencies
 Unt 3: Tansst at Lw Fquncs JT Tansst Mdlng mdl s an qualnt ccut that psnts th chaactstcs f th tansst. mdl uss ccut lmnts that appxmat th ha f th tansst. Th a tw mdls cmmnly usd n small sgnal analyss f
Unt 3: Tansst at Lw Fquncs JT Tansst Mdlng mdl s an qualnt ccut that psnts th chaactstcs f th tansst. mdl uss ccut lmnts that appxmat th ha f th tansst. Th a tw mdls cmmnly usd n small sgnal analyss f
Note: Torque is prop. to current Stationary voltage is prop. to speed
 DC Mach Cotrol Mathmatcal modl. Armatr ad orq f m m a m m r a a a a a dt d ψ ψ ψ ω Not: orq prop. to crrt Statoary voltag prop. to pd Mathmatcal modl. Fld magtato f f f f d f dt a f ψ m m f f m fλ h torq
DC Mach Cotrol Mathmatcal modl. Armatr ad orq f m m a m m r a a a a a dt d ψ ψ ψ ω Not: orq prop. to crrt Statoary voltag prop. to pd Mathmatcal modl. Fld magtato f f f f d f dt a f ψ m m f f m fλ h torq
Basic Electrical Engineering for Welding [ ] --- Introduction ---
![Basic Electrical Engineering for Welding [ ] --- Introduction ---](/thumbs/80/81788662.jpg "Basic Electrical Engineering for Welding [ ] --- Introduction ---") Basc Elctrcal Engnrng for Wldng [] --- Introducton --- akayosh OHJI Profssor Ertus, Osaka Unrsty Dr. of Engnrng VIUAL WELD CO.,LD t-ohj@alc.co.jp OK 15 Ex. Basc A.C. crcut h fgurs n A-group show thr typcal
Basc Elctrcal Engnrng for Wldng [] --- Introducton --- akayosh OHJI Profssor Ertus, Osaka Unrsty Dr. of Engnrng VIUAL WELD CO.,LD t-ohj@alc.co.jp OK 15 Ex. Basc A.C. crcut h fgurs n A-group show thr typcal
The Random Phase Approximation:
 Th Random Phas Appoxmaton: Elctolyts, Polym Solutons and Polylctolyts I. Why chagd systms a so mpotant: thy a wat solubl. A. bology B. nvonmntally-fndly polym pocssng II. Elctolyt solutons standad dvaton
Th Random Phas Appoxmaton: Elctolyts, Polym Solutons and Polylctolyts I. Why chagd systms a so mpotant: thy a wat solubl. A. bology B. nvonmntally-fndly polym pocssng II. Elctolyt solutons standad dvaton
Exercises for lectures 7 Steady state, tracking and disturbance rejection
 Exrc for lctur 7 Stady tat, tracng and dturbanc rjcton Martn Hromčí Automatc control 06-3-7 Frquncy rpon drvaton Automatcé řízní - Kybrnta a robota W lad a nuodal nput gnal to th nput of th ytm, gvn by
Exrc for lctur 7 Stady tat, tracng and dturbanc rjcton Martn Hromčí Automatc control 06-3-7 Frquncy rpon drvaton Automatcé řízní - Kybrnta a robota W lad a nuodal nput gnal to th nput of th ytm, gvn by
6.012 Electronic Devices and Circuits Formula Sheet for Final Exam, Fall q = 1.6x10 19 Coul III IV V = x10 14 o. = 3.
 6.0 Elctc Dvcs ad Ccuts ula Sht f al Exa, all 003 Paat Valus: Pdc Tabl: q.6x0 9 Cul III IV V 8.854 x0 4 /c,,s.7,,so 3.9 B C N 0 S /c, SO 3.5 x0 3 /c Al S P [S@R.T] 0 0 c 3 Ga G As /q 0.05 V ; ( /q) l0
6.0 Elctc Dvcs ad Ccuts ula Sht f al Exa, all 003 Paat Valus: Pdc Tabl: q.6x0 9 Cul III IV V 8.854 x0 4 /c,,s.7,,so 3.9 B C N 0 S /c, SO 3.5 x0 3 /c Al S P [S@R.T] 0 0 c 3 Ga G As /q 0.05 V ; ( /q) l0
Partial Fraction Expansion
 Paial Facion Expanion Whn ying o find h inv Laplac anfom o inv z anfom i i hlpfl o b abl o bak a complicad aio of wo polynomial ino fom ha a on h Laplac Tanfom o z anfom abl. W will illa h ing Laplac anfom.
Paial Facion Expanion Whn ying o find h inv Laplac anfom o inv z anfom i i hlpfl o b abl o bak a complicad aio of wo polynomial ino fom ha a on h Laplac Tanfom o z anfom abl. W will illa h ing Laplac anfom.
III. Electromechanical Energy Conversion
 . Electoancal Enegy Coneson Schematc epesentaton o an toancal enegy coneson ece coppe losses coe losses (el losses) ancal losses Deental enegy nput om tcal souce: W V t Rt e t t W net ancal enegy output
. Electoancal Enegy Coneson Schematc epesentaton o an toancal enegy coneson ece coppe losses coe losses (el losses) ancal losses Deental enegy nput om tcal souce: W V t Rt e t t W net ancal enegy output
Synchronous Machine Modeling
 ECE 53 Session ; Page / Fall 07 Synchronous Machine Moeling Reference θ Quarature Axis B C Direct Axis Q G F D A F G Q A D C B Transient Moel for a Synchronous Machine Generator Convention ECE 53 Session
ECE 53 Session ; Page / Fall 07 Synchronous Machine Moeling Reference θ Quarature Axis B C Direct Axis Q G F D A F G Q A D C B Transient Moel for a Synchronous Machine Generator Convention ECE 53 Session
EE8412 Advanced AC Drive Systems. Topic 6 Field Oriented control (FOC)
") Advanced AC Dive Syte Topic 6 Field Oiented contol (FOC) Souce: ABB 1 Advanced AC Dive Syte Field Oiented Contol (FOC) ectue Topi Geneal Block Diaga of FOC Diect Field Oiented Contol Diect FOC with Cuent
Advanced AC Dive Syte Topic 6 Field Oiented contol (FOC) Souce: ABB 1 Advanced AC Dive Syte Field Oiented Contol (FOC) ectue Topi Geneal Block Diaga of FOC Diect Field Oiented Contol Diect FOC with Cuent
Coupling Element and Coupled circuits. Coupled inductor Ideal transformer Controlled sources
 Couplng Element and Coupled crcuts Coupled nductor Ideal transformer Controlled sources Couplng Element and Coupled crcuts Coupled elements hae more that one branch and branch oltages or branch currents
Couplng Element and Coupled crcuts Coupled nductor Ideal transformer Controlled sources Couplng Element and Coupled crcuts Coupled elements hae more that one branch and branch oltages or branch currents
Grand Canonical Ensemble
 Th nsmbl of systms mmrsd n a partcl-hat rsrvor at constant tmpratur T, prssur P, and chmcal potntal. Consdr an nsmbl of M dntcal systms (M =,, 3,...M).. Thy ar mutually sharng th total numbr of partcls
Th nsmbl of systms mmrsd n a partcl-hat rsrvor at constant tmpratur T, prssur P, and chmcal potntal. Consdr an nsmbl of M dntcal systms (M =,, 3,...M).. Thy ar mutually sharng th total numbr of partcls
[ ] 1+ lim G( s) 1+ s + s G s s G s Kacc SYSTEM PERFORMANCE. Since. Lecture 10: Steady-state Errors. Steady-state Errors. Then
![[ ] 1+ lim G( s) 1+ s + s G s s G s Kacc SYSTEM PERFORMANCE. Since. Lecture 10: Steady-state Errors. Steady-state Errors. Then](/thumbs/79/79716622.jpg "[ ] 1+ lim G( s) 1+ s + s G s s G s Kacc SYSTEM PERFORMANCE. Since. Lecture 10: Steady-state Errors. Steady-state Errors. Then") SYSTEM PERFORMANCE Lctur 0: Stady-tat Error Stady-tat Error Lctur 0: Stady-tat Error Dr.alyana Vluvolu Stady-tat rror can b found by applying th final valu thorm and i givn by lim ( t) lim E ( ) t 0 providd
SYSTEM PERFORMANCE Lctur 0: Stady-tat Error Stady-tat Error Lctur 0: Stady-tat Error Dr.alyana Vluvolu Stady-tat rror can b found by applying th final valu thorm and i givn by lim ( t) lim E ( ) t 0 providd
Why switching? Modulation. Switching amp. Losses. Converter topology. i d. Continuous amplifiers have low efficiency. Antag : u i
 Modlaton Indtral Elctrcal Engnrng and Atomaton Lnd nvrty, Swdn Why wtchng? Contno amplfr hav low ffcncy a b Contno wtch pt ( t ) = pn( t) = ( a b) Antag : ( a b) = Pn = Pt η = = = Pn Swtchng amp. Lo Convrtr
Modlaton Indtral Elctrcal Engnrng and Atomaton Lnd nvrty, Swdn Why wtchng? Contno amplfr hav low ffcncy a b Contno wtch pt ( t ) = pn( t) = ( a b) Antag : ( a b) = Pn = Pt η = = = Pn Swtchng amp. Lo Convrtr
Control Systems. Lecture 8 Root Locus. Root Locus. Plant. Controller. Sensor
 Cotol Syt ctu 8 Root ocu Clacal Cotol Pof. Eugo Schut hgh Uvty Root ocu Cotoll Plat R E C U Y - H C D So Y C C R C H Wtg th loo ga a w a ttd tackg th clod-loo ol a ga va Clacal Cotol Pof. Eugo Schut hgh
Cotol Syt ctu 8 Root ocu Clacal Cotol Pof. Eugo Schut hgh Uvty Root ocu Cotoll Plat R E C U Y - H C D So Y C C R C H Wtg th loo ga a w a ttd tackg th clod-loo ol a ga va Clacal Cotol Pof. Eugo Schut hgh
E F. and H v. or A r and F r are dual of each other.
 A Duality Thom: Consid th following quations as an xampl = A = F μ ε H A E A = jωa j ωμε A + β A = μ J μ A x y, z = J, y, z 4π E F ( A = jω F j ( F j β H F ωμε F + β F = ε M jβ ε F x, y, z = M, y, z 4π
A Duality Thom: Consid th following quations as an xampl = A = F μ ε H A E A = jωa j ωμε A + β A = μ J μ A x y, z = J, y, z 4π E F ( A = jω F j ( F j β H F ωμε F + β F = ε M jβ ε F x, y, z = M, y, z 4π
ANALYSIS: The mass rate balance for the one-inlet, one-exit control volume at steady state is
 Problm 4.47 Fgur P4.47 provds stady stat opratng data for a pump drawng watr from a rsrvor and dlvrng t at a prssur of 3 bar to a storag tank prchd 5 m abov th rsrvor. Th powr nput to th pump s 0.5 kw.
Problm 4.47 Fgur P4.47 provds stady stat opratng data for a pump drawng watr from a rsrvor and dlvrng t at a prssur of 3 bar to a storag tank prchd 5 m abov th rsrvor. Th powr nput to th pump s 0.5 kw.
Steady-State Analysis and Control of Double Feed Induction Motor
 ntnational Jounal of Elctonic and Elctical Engining 6 2012 Stady-Stat Analyi and Contol of Doubl Fd nduction Moto H. Sdiki, Dj. Ould Abdlam, T. Otman-chif, A. Bchouch, K. Mbah Abtact Thi pap xplo tady-tat
ntnational Jounal of Elctonic and Elctical Engining 6 2012 Stady-Stat Analyi and Contol of Doubl Fd nduction Moto H. Sdiki, Dj. Ould Abdlam, T. Otman-chif, A. Bchouch, K. Mbah Abtact Thi pap xplo tady-tat
9/12/2013. Microelectronics Circuit Analysis and Design. Modes of Operation. Cross Section of Integrated Circuit npn Transistor
 Mcoelectoncs Ccut Analyss and Desgn Donald A. Neamen Chapte 5 The pola Juncton Tanssto In ths chapte, we wll: Dscuss the physcal stuctue and opeaton of the bpola juncton tanssto. Undestand the dc analyss
Mcoelectoncs Ccut Analyss and Desgn Donald A. Neamen Chapte 5 The pola Juncton Tanssto In ths chapte, we wll: Dscuss the physcal stuctue and opeaton of the bpola juncton tanssto. Undestand the dc analyss
ES 330 Electronics II Homework # 5 (Fall 2016 Due Wednesday, October 4, 2017)
") Pag1 Na olutions E 33 Elctonics II Howok # 5 (Fall 216 Du Wdnsday, Octob 4, 217) Pobl 1 (25 pots) A coon-itt aplifi uss a BJT with cunt ga = 1 whn biasd at I =.5 A. It has a collcto sistanc of = 1 k. (a)
Pag1 Na olutions E 33 Elctonics II Howok # 5 (Fall 216 Du Wdnsday, Octob 4, 217) Pobl 1 (25 pots) A coon-itt aplifi uss a BJT with cunt ga = 1 whn biasd at I =.5 A. It has a collcto sistanc of = 1 k. (a)
GMm. 10a-0. Satellite Motion. GMm U (r) - U (r ) how high does it go? Escape velocity. Kepler s 2nd Law ::= Areas Angular Mom. Conservation!!!!
 - U (r ) how high does it go? Escape velocity. Kepler s 2nd Law ::= Areas Angular Mom. Conservation!!!!") F Satllt Moton 10a-0 U () - U ( ) 0 f ow g dos t go? scap locty Kpl s nd Law ::= Aas Angula Mo. Consaton!!!! Nwton s Unsal Law of Gaty 10a-1 M F F 1) F acts along t ln connctng t cnts of objcts Cntal Foc
F Satllt Moton 10a-0 U () - U ( ) 0 f ow g dos t go? scap locty Kpl s nd Law ::= Aas Angula Mo. Consaton!!!! Nwton s Unsal Law of Gaty 10a-1 M F F 1) F acts along t ln connctng t cnts of objcts Cntal Foc
Chapter 3 Binary Image Analysis. Comunicação Visual Interactiva
 Chapt 3 Bnay Iag Analyss Counação Vsual Intatva Most oon nghbohoods Pxls and Nghbohoods Nghbohood Vznhança N 4 Nghbohood N 8 Us of ass Exapl: ogn nput output CVI - Bnay Iag Analyss Exapl 0 0 0 0 0 output
Chapt 3 Bnay Iag Analyss Counação Vsual Intatva Most oon nghbohoods Pxls and Nghbohoods Nghbohood Vznhança N 4 Nghbohood N 8 Us of ass Exapl: ogn nput output CVI - Bnay Iag Analyss Exapl 0 0 0 0 0 output
PMSM. Mechanical Design
 PMSM Indutial Electical Engineeing and Autoation Lund Univeity, Sweden Mechanical Deign Indutial Electical Engineeing and Autoation 1 Indutial Electical Engineeing and Autoation y i b i β Matheatical Model
PMSM Indutial Electical Engineeing and Autoation Lund Univeity, Sweden Mechanical Deign Indutial Electical Engineeing and Autoation 1 Indutial Electical Engineeing and Autoation y i b i β Matheatical Model
Equivalent Circuits with Multiple Damper Windings (e.g. Round rotor Machines)
") Equivalent Circuits with Multiple Damper Windings (e.g. Round rotor Machines) d axis: L fd L F - M R fd F L 1d L D - M R 1d D R fd R F e fd e F R 1d R D Subscript Notations: ( ) fd ~ field winding quantities
Equivalent Circuits with Multiple Damper Windings (e.g. Round rotor Machines) d axis: L fd L F - M R fd F L 1d L D - M R 1d D R fd R F e fd e F R 1d R D Subscript Notations: ( ) fd ~ field winding quantities
Electric and magnetic field sensor and integrator equations
 Techncal Note - TN12 Electrc and magnetc feld enor and ntegrator uaton Bertrand Da, montena technology, 1728 oen, Swtzerland Table of content 1. Equaton of the derate electrc feld enor... 1 2. Integraton
Techncal Note - TN12 Electrc and magnetc feld enor and ntegrator uaton Bertrand Da, montena technology, 1728 oen, Swtzerland Table of content 1. Equaton of the derate electrc feld enor... 1 2. Integraton
Chapter 2 Problem Solutions 2.1 R v = Peak diode current i d (max) = R 1 K 0.6 I 0 I 0
 = R 1 K 0.6 I 0 I 0") Chapter Problem Solutons. K γ.6, r f Ω For v, v.6 r + f ( 9.4) +. v 9..6 9.. v v v v v T ln and S v T ln S v v.3 8snωt (a) vs 3.33snωt 6 3.33 Peak dode current d (max) (b) P v s (max) 3.3 (c) T o π vo(
Chapter Problem Solutons. K γ.6, r f Ω For v, v.6 r + f ( 9.4) +. v 9..6 9.. v v v v v T ln and S v T ln S v v.3 8snωt (a) vs 3.33snωt 6 3.33 Peak dode current d (max) (b) P v s (max) 3.3 (c) T o π vo(
Small signal analysis
 Small gnal analy. ntroducton Let u conder the crcut hown n Fg., where the nonlnear retor decrbed by the equaton g v havng graphcal repreentaton hown n Fg.. ( G (t G v(t v Fg. Fg. a D current ource wherea
Small gnal analy. ntroducton Let u conder the crcut hown n Fg., where the nonlnear retor decrbed by the equaton g v havng graphcal repreentaton hown n Fg.. ( G (t G v(t v Fg. Fg. a D current ource wherea
Environmental Engineering / Fundamentals of Fluid Mechanics and Heat Transfer 2017/2018
 H H Envonmntal Engnng / Fundamntal o Flud Mcanc and Hat an 07/08. Dtmn t tack pu n a buldng wc m g, t ndoo a tmpatu = +0 C and outdoo a tmpatu = C. Wat t nutal lvl gt, t a two opnng n t buldng nvlop, on
H H Envonmntal Engnng / Fundamntal o Flud Mcanc and Hat an 07/08. Dtmn t tack pu n a buldng wc m g, t ndoo a tmpatu = +0 C and outdoo a tmpatu = C. Wat t nutal lvl gt, t a two opnng n t buldng nvlop, on
EMF induced in a coil by moving a bar magnet. Induced EMF: Faraday s Law. Induction and Oscillations. Electromagnetic Induction.
 Inducton and Oscllatons Ch. 3: Faraday s Law Ch. 3: AC Crcuts Induced EMF: Faraday s Law Tme-dependent B creates nduced E In partcular: A changng magnetc flux creates an emf n a crcut: Ammeter or voltmeter.
Inducton and Oscllatons Ch. 3: Faraday s Law Ch. 3: AC Crcuts Induced EMF: Faraday s Law Tme-dependent B creates nduced E In partcular: A changng magnetc flux creates an emf n a crcut: Ammeter or voltmeter.
Homework: Due
 hw-.nb: //::9:5: omwok: Du -- Ths st (#7) s du on Wdnsday, //. Th soluton fom Poblm fom th xam s found n th mdtm solutons. ü Sakua Chap : 7,,,, 5. Mbach.. BJ 6. ü Mbach. Th bass stats of angula momntum
hw-.nb: //::9:5: omwok: Du -- Ths st (#7) s du on Wdnsday, //. Th soluton fom Poblm fom th xam s found n th mdtm solutons. ü Sakua Chap : 7,,,, 5. Mbach.. BJ 6. ü Mbach. Th bass stats of angula momntum
ECE 422/522 Power System Operations & Planning/ Power Systems Analysis II 2 Synchronous Machine Modeling
 ECE 422/522 Power System Operations & Planning/ Power Systems Analysis II 2 Synchronous achine odeling Spring 214 Instructor: Kai Sun 1 Outline Synchronous achine odeling Per Unit Representation Simplified
ECE 422/522 Power System Operations & Planning/ Power Systems Analysis II 2 Synchronous achine odeling Spring 214 Instructor: Kai Sun 1 Outline Synchronous achine odeling Per Unit Representation Simplified
Vector Control. Application to Induction Motor Control. DSP in Motion Control - Seminar
 Vecto Contol Application to Induction Moto Contol Vecto Contol - Pinciple The Aim of Vecto Contol is to Oient the Flux Poducing Component of the Stato Cuent to some Suitable Flux Vecto unde all Opeating
Vecto Contol Application to Induction Moto Contol Vecto Contol - Pinciple The Aim of Vecto Contol is to Oient the Flux Poducing Component of the Stato Cuent to some Suitable Flux Vecto unde all Opeating
Chapter 10 Time-Domain Analysis and Design of Control Systems
 ME 43 Sytm Dynamic & Control Sction 0-5: Stady Stat Error and Sytm Typ Chaptr 0 Tim-Domain Analyi and Dign of Control Sytm 0.5 STEADY STATE ERRORS AND SYSTEM TYPES A. Bazoun Stady-tat rror contitut an
ME 43 Sytm Dynamic & Control Sction 0-5: Stady Stat Error and Sytm Typ Chaptr 0 Tim-Domain Analyi and Dign of Control Sytm 0.5 STEADY STATE ERRORS AND SYSTEM TYPES A. Bazoun Stady-tat rror contitut an
Heisenberg Model. Sayed Mohammad Mahdi Sadrnezhaad. Supervisor: Prof. Abdollah Langari
 snbrg Modl Sad Mohammad Mahd Sadrnhaad Survsor: Prof. bdollah Langar bstract: n ths rsarch w tr to calculat analtcall gnvalus and gnvctors of fnt chan wth ½-sn artcls snbrg modl. W drov gnfuctons for closd
snbrg Modl Sad Mohammad Mahd Sadrnhaad Survsor: Prof. bdollah Langar bstract: n ths rsarch w tr to calculat analtcall gnvalus and gnvctors of fnt chan wth ½-sn artcls snbrg modl. W drov gnfuctons for closd
Calculation of electromotive force induced by the slot harmonics and parameters of the linear generator
 Calculation of lctromotiv forc inducd by th lot harmonic and paramtr of th linar gnrator (*)Hui-juan IU (**)Yi-huang ZHANG (*)School of Elctrical Enginring, Bijing Jiaotong Univrity, Bijing,China 8++58483,
Calculation of lctromotiv forc inducd by th lot harmonic and paramtr of th linar gnrator (*)Hui-juan IU (**)Yi-huang ZHANG (*)School of Elctrical Enginring, Bijing Jiaotong Univrity, Bijing,China 8++58483,
(8) Gain Stage and Simple Output Stage
 Gain Stage and Simple Output Stage") EEEB23 Electoncs Analyss & Desgn (8) Gan Stage and Smple Output Stage Leanng Outcome Able to: Analyze an example of a gan stage and output stage of a multstage amplfe. efeence: Neamen, Chapte 11 8.0) ntoducton
EEEB23 Electoncs Analyss & Desgn (8) Gan Stage and Smple Output Stage Leanng Outcome Able to: Analyze an example of a gan stage and output stage of a multstage amplfe. efeence: Neamen, Chapte 11 8.0) ntoducton
ESE (Prelims) - Offline Test Series ELECTRICAL ENGINEERING SUBJECT: Electrical Machines & Systems and Signal Processing SOLUTIONS
 - Offline Test Series ELECTRICAL ENGINEERING SUBJECT: Electrical Machines & Systems and Signal Processing SOLUTIONS") TEST ID: 30 ESE- 09 (Plims) - Offlin Tst Sis ELECTRICAL ENGINEERING Tst-3 SUBJECT: Elctical Machins & Systms and Signal Pocssing SOLUTIONS 0. Ans: (c) Sol: With hot-olld stl laminations max [B m ] A. A
TEST ID: 30 ESE- 09 (Plims) - Offlin Tst Sis ELECTRICAL ENGINEERING Tst-3 SUBJECT: Elctical Machins & Systms and Signal Pocssing SOLUTIONS 0. Ans: (c) Sol: With hot-olld stl laminations max [B m ] A. A
CHAPTER 13. Exercises. E13.1 The emitter current is given by the Shockley equation:
 HPT 3 xercses 3. The emtter current s gen by the Shockley equaton: S exp VT For operaton wth, we hae exp >> S >>, and we can wrte VT S exp VT Solng for, we hae 3. 0 6ln 78.4 mv 0 0.784 5 4.86 V VT ln 4
HPT 3 xercses 3. The emtter current s gen by the Shockley equaton: S exp VT For operaton wth, we hae exp >> S >>, and we can wrte VT S exp VT Solng for, we hae 3. 0 6ln 78.4 mv 0 0.784 5 4.86 V VT ln 4
Detection and Estimation Theory
 ESE 54 Detecton and Etmaton Theoy Joeph A. O Sullvan Samuel C. Sach Pofeo Electonc Sytem and Sgnal Reeach Laboatoy Electcal and Sytem Engneeng Wahngton Unvety 411 Jolley Hall 314-935-4173 (Lnda anwe) jao@wutl.edu
ESE 54 Detecton and Etmaton Theoy Joeph A. O Sullvan Samuel C. Sach Pofeo Electonc Sytem and Sgnal Reeach Laboatoy Electcal and Sytem Engneeng Wahngton Unvety 411 Jolley Hall 314-935-4173 (Lnda anwe) jao@wutl.edu
Brushless Doubly-Fed Induction Machines: Torque Ripple
 Bushlss Doubly-Fd Induction Machins: Toqu Rippl Tim. D. Stous, Xuzhou Wang, Hn Polind, Snio Mmb, IEEE, and J. A. (Bam Fia, Fllow, IEEE Abstact-- Th Bushlss DFIM without its bush-ga and slip-ings loos pomising
Bushlss Doubly-Fd Induction Machins: Toqu Rippl Tim. D. Stous, Xuzhou Wang, Hn Polind, Snio Mmb, IEEE, and J. A. (Bam Fia, Fllow, IEEE Abstact-- Th Bushlss DFIM without its bush-ga and slip-ings loos pomising
CCE PR Revised & Un-Revised
 D CCE PR Revised & Un-Revised 560 00 KARNATAKA SECONDARY EDUCATION EXAMINATION BOARD, MALLESWARAM, BANGALORE 560 00 08 S.S.L.C. EXAMINATION, JUNE, 08 :. 06. 08 ] MODEL ANSWERS : 8-K Date :. 06. 08 ] CODE
D CCE PR Revised & Un-Revised 560 00 KARNATAKA SECONDARY EDUCATION EXAMINATION BOARD, MALLESWARAM, BANGALORE 560 00 08 S.S.L.C. EXAMINATION, JUNE, 08 :. 06. 08 ] MODEL ANSWERS : 8-K Date :. 06. 08 ] CODE
Noise in electronic components.
 No lto opot5098, JDS No lto opot Th PN juto Th ut thouh a PN juto ha fou opot t: two ffuo ut (hol fo th paa to th aa a lto th oppot to) a thal at oty ha a (hol fo th aa to th paa a lto th oppot to, laka
No lto opot5098, JDS No lto opot Th PN juto Th ut thouh a PN juto ha fou opot t: two ffuo ut (hol fo th paa to th aa a lto th oppot to) a thal at oty ha a (hol fo th aa to th paa a lto th oppot to, laka
V. Principles of Irreversible Thermodynamics. s = S - S 0 (7.3) s = = - g i, k. "Flux": = da i. "Force": = -Â g a ik k = X i. Â J i X i (7.
 s = = - g i, k. Flux: = da i. Force: = -Â g a ik k = X i. Â J i X i (7.") Themodynamcs and Knetcs of Solds 71 V. Pncples of Ievesble Themodynamcs 5. Onsage s Teatment s = S - S 0 = s( a 1, a 2,...) a n = A g - A n (7.6) Equlbum themodynamcs detemnes the paametes of an equlbum
Themodynamcs and Knetcs of Solds 71 V. Pncples of Ievesble Themodynamcs 5. Onsage s Teatment s = S - S 0 = s( a 1, a 2,...) a n = A g - A n (7.6) Equlbum themodynamcs detemnes the paametes of an equlbum
PHYSICS - CLUTCH CH 28: INDUCTION AND INDUCTANCE.
 !! www.clutchprep.com CONCEPT: ELECTROMAGNETIC INDUCTION A col of wre wth a VOLTAGE across each end wll have a current n t - Wre doesn t HAVE to have voltage source, voltage can be INDUCED V Common ways
!! www.clutchprep.com CONCEPT: ELECTROMAGNETIC INDUCTION A col of wre wth a VOLTAGE across each end wll have a current n t - Wre doesn t HAVE to have voltage source, voltage can be INDUCED V Common ways
The Backpropagation Algorithm
 The Backpopagaton Algothm Achtectue of Feedfowad Netwok Sgmodal Thehold Functon Contuctng an Obectve Functon Tanng a one-laye netwok by teepet decent Tanng a two-laye netwok by teepet decent Copyght Robet
The Backpopagaton Algothm Achtectue of Feedfowad Netwok Sgmodal Thehold Functon Contuctng an Obectve Functon Tanng a one-laye netwok by teepet decent Tanng a two-laye netwok by teepet decent Copyght Robet
Robustness Analysis of Stator Voltage Vector Direct Torque Control for Induction Motor
 IX Symoium Indutial Elctonic INEL, Banja Luka, Novm 3, Routn Analyi of Stato Voltag Vcto ict oqu Contol fo Induction Moto Alkanda Ž. Rakić, Sloodan N. Vukoavić Univity of Blgad, School of Elctical Engining
IX Symoium Indutial Elctonic INEL, Banja Luka, Novm 3, Routn Analyi of Stato Voltag Vcto ict oqu Contol fo Induction Moto Alkanda Ž. Rakić, Sloodan N. Vukoavić Univity of Blgad, School of Elctical Engining
STATISTICAL MECHANICS OF DIATOMIC GASES
 Pof. D. I. ass Phys54 7 -Ma-8 Diatomic_Gas (Ashly H. Cat chapt 5) SAISICAL MECHAICS OF DIAOMIC GASES - Fo monatomic gas whos molculs hav th dgs of fdom of tanslatoy motion th intnal u 3 ngy and th spcific
Pof. D. I. ass Phys54 7 -Ma-8 Diatomic_Gas (Ashly H. Cat chapt 5) SAISICAL MECHAICS OF DIAOMIC GASES - Fo monatomic gas whos molculs hav th dgs of fdom of tanslatoy motion th intnal u 3 ngy and th spcific
A Novel Method for Vector Control of Three-Phase Induction Motor under Open-Phase Fault
 6 J. Eng. Tchnol. Sc. Vol. 47, No., 05, 6-45 A Nol thod for Vctor Control of Thr-Pha Inducton otor undr Opn-Pha Fault ohammad Jannat, Syd Ham Agar, Nk Rumz Nk Idr & ohd Junad Abdul Azz UT-PROTON Futur
6 J. Eng. Tchnol. Sc. Vol. 47, No., 05, 6-45 A Nol thod for Vctor Control of Thr-Pha Inducton otor undr Opn-Pha Fault ohammad Jannat, Syd Ham Agar, Nk Rumz Nk Idr & ohd Junad Abdul Azz UT-PROTON Futur
Extinction Ratio and Power Penalty
 Application Not: HFAN-.. Rv.; 4/8 Extinction Ratio and ow nalty AVALABLE Backgound Extinction atio is an impotant paamt includd in th spcifications of most fib-optic tanscivs. h pupos of this application
Application Not: HFAN-.. Rv.; 4/8 Extinction Ratio and ow nalty AVALABLE Backgound Extinction atio is an impotant paamt includd in th spcifications of most fib-optic tanscivs. h pupos of this application
Lecture 7 Diffusion. Our fluid equations that we developed before are: v t v mn t
 Cla ot fo EE6318/Phy 6383 Spg 001 Th doumt fo tutoal u oly ad may ot b opd o dtbutd outd of EE6318/Phy 6383 tu 7 Dffuo Ou flud quato that w dvlopd bfo a: f ( )+ v v m + v v M m v f P+ q E+ v B 13 1 4 34
Cla ot fo EE6318/Phy 6383 Spg 001 Th doumt fo tutoal u oly ad may ot b opd o dtbutd outd of EE6318/Phy 6383 tu 7 Dffuo Ou flud quato that w dvlopd bfo a: f ( )+ v v m + v v M m v f P+ q E+ v B 13 1 4 34
PHYSICS - CLUTCH 1E CH 28: INDUCTION AND INDUCTANCE.
 !! www.clutchprep.com CONCEPT: ELECTROMAGNETIC INDUCTION A col of wre wth a VOLTAGE across each end wll have a current n t - Wre doesn t HAVE to have voltage source, voltage can be INDUCED V Common ways
!! www.clutchprep.com CONCEPT: ELECTROMAGNETIC INDUCTION A col of wre wth a VOLTAGE across each end wll have a current n t - Wre doesn t HAVE to have voltage source, voltage can be INDUCED V Common ways
Chapter 6. Operational Amplifier. inputs can be defined as the average of the sum of the two signals.
 6 Operatonal mpler Chapter 6 Operatonal mpler CC Symbol: nput nput Output EE () Non-nvertng termnal, () nvertng termnal nput mpedance : Few mega (ery hgh), Output mpedance : Less than (ery low) Derental
6 Operatonal mpler Chapter 6 Operatonal mpler CC Symbol: nput nput Output EE () Non-nvertng termnal, () nvertng termnal nput mpedance : Few mega (ery hgh), Output mpedance : Less than (ery low) Derental
Direct Torque Control Scheme For Dual-Three-Phase Induction Motor
 The Intenatonal Powe Electonc Confeence Dect Toque Contol Scheme Fo Dual-Thee-Phae Inducton Moto R. Zameddne, T. Undeland Depatment of Electc Powe Engneeng Enegy Coneon Reeach Goup Nowegan Unety of Scence
The Intenatonal Powe Electonc Confeence Dect Toque Contol Scheme Fo Dual-Thee-Phae Inducton Moto R. Zameddne, T. Undeland Depatment of Electc Powe Engneeng Enegy Coneon Reeach Goup Nowegan Unety of Scence
Engineering Differential Equations Practice Final Exam Solutions Fall 2011
 9.6 Enginring Diffrntial Equation Practic Final Exam Solution Fall 0 Problm. (0 pt.) Solv th following initial valu problm: x y = xy, y() = 4. Thi i a linar d.. bcau y and y appar only to th firt powr.
9.6 Enginring Diffrntial Equation Practic Final Exam Solution Fall 0 Problm. (0 pt.) Solv th following initial valu problm: x y = xy, y() = 4. Thi i a linar d.. bcau y and y appar only to th firt powr.
filing for office of CO AN Co L POlS R 4 home phone epqropriate elections officials ORS Filing for State Voters Pamphlet Fi rstday
 Fn nddy npn nn L v 6 R 49 h nn pb d nd y b pbhd pdd p yp pn by n b k nk nb d ndd n d M LG hw n hd pp n b H MB L n A L P R 4 d dp pn nb ddd y 8 zp d R D R A b A ka DL d ny d h phn d AK L x dd W b W n ddwh
Fn nddy npn nn L v 6 R 49 h nn pb d nd y b pbhd pdd p yp pn by n b k nk nb d ndd n d M LG hw n hd pp n b H MB L n A L P R 4 d dp pn nb ddd y 8 zp d R D R A b A ka DL d ny d h phn d AK L x dd W b W n ddwh
Moving Target Hough Detector in Pulse Jamming*
 BULGARIA ACADEMY OF SCIECES CYBEREICS AD IFORMAIO ECHOLOGIES Volum 7 o Sofa 7 Movng agt Hough Dtcto n ul Jammng* Lyuba Douova Inttut of Infomaton chnolog 3 Sofa Abtact: h Hough dtcto wth two typ of a Contant
BULGARIA ACADEMY OF SCIECES CYBEREICS AD IFORMAIO ECHOLOGIES Volum 7 o Sofa 7 Movng agt Hough Dtcto n ul Jammng* Lyuba Douova Inttut of Infomaton chnolog 3 Sofa Abtact: h Hough dtcto wth two typ of a Contant
General Theory of Electric Machines 2017 Shiraz University of Technology Dr. A. Rahideh
 In The ame o Go The Mot Compaonate, The Mot Mecul Geneal Theoy o Electc Machne 7 Shaz Unety o Technoloy D. A. Raheh Tale o Content. Intoucton. Tanome. Reeence Fame Theoy 4. Inucton Machne 5. Synchonou
In The ame o Go The Mot Compaonate, The Mot Mecul Geneal Theoy o Electc Machne 7 Shaz Unety o Technoloy D. A. Raheh Tale o Content. Intoucton. Tanome. Reeence Fame Theoy 4. Inucton Machne 5. Synchonou
UGC POINT LEADING INSTITUE FOR CSIR-JRF/NET, GATE & JAM. are the polar coordinates of P, then. 2 sec sec tan. m 2a m m r. f r.
 UGC POINT LEADING INSTITUE FOR CSIR-JRF/NET, GATE & JAM Solution (TEST SERIES ST PAPER) Dat: No 5. Lt a b th adius of cicl, dscibd by th aticl P in fig. if, a th ola coodinats of P, thn acos Diffntial
UGC POINT LEADING INSTITUE FOR CSIR-JRF/NET, GATE & JAM Solution (TEST SERIES ST PAPER) Dat: No 5. Lt a b th adius of cicl, dscibd by th aticl P in fig. if, a th ola coodinats of P, thn acos Diffntial