Advanced Adaptive Control for Unintended System Behavior
|
|
|
- Jasmine Phelps
- 5 years ago
- Views:
Transcription
1 Advanced Adaptive Control for Unintended System Behavior Dr. Chengyu Cao Mechanical Engineering University of Connecticut
2 Outline Part I: Challenges: Unintended System Behavior Part II: Proposed L 1 Adaptive Control Techniques Part III: HVAC System and Control Objectives Part IV: Plans to Achieve Objectives for HVAC System Part V: Design Controllers for HVAC with GUI Part VI: Project Milestones
3 Challenges In practice, engineering Direct systems Adaptive Control are often affected by unintended behaviors. Causes to off-nominal situations disturbances, model uncertainties measurement noise etc.
4 L1 Adaptive Control Benefits of L1 adaptive control Direct Adaptive Control improves transient performance handles time-varying model uncertainties and disturbances reduces V&V (Verification and Validation) efforts
5 L 1 Adaptive Control Structure Features: Handles time-varying parameters and uncertainties Allows for fast and robust adaptation Improves transient performance and tracking performance Plant Adaptive Law (Fast Adaptation) Adaptation State Predictor Control Control Law Low Pass Filter
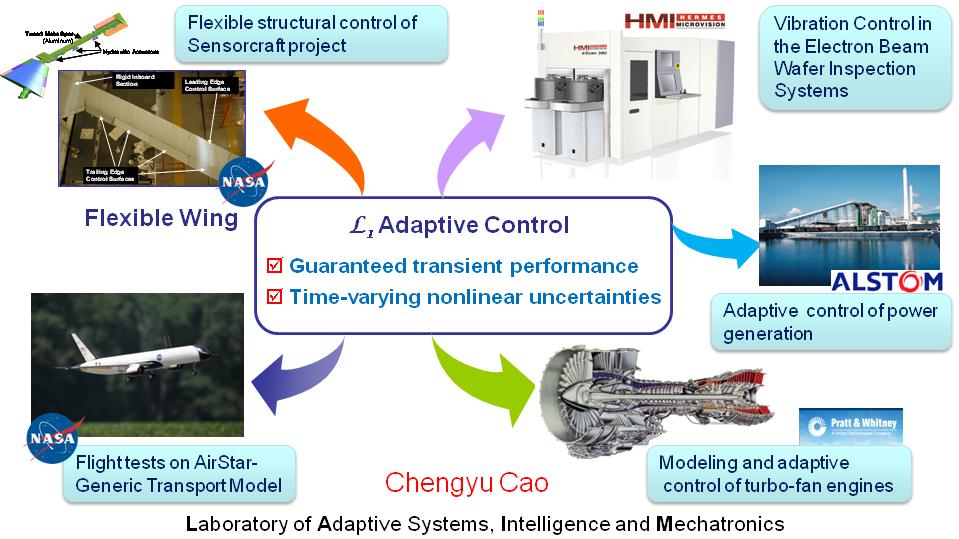
6 Applications




7 Application of L 1 in Flight Control NASA: AirSTAR L 1 adaptive controller closes the loop for 14 minutes finishes all the scenarios successfully Fort Pickett, VA, April 2010, 14 th flight of AirStar
8 Limitations in L1 Adaptive Control The benefit of L1 adaptive control lim u () t u () t = 0, t 0; Γ ( ) ad lim xt () x() t = 0, t 0. Γ ( ) r r However, Γ 1/T, but T is limited by hardware sampling rate To overcome this limitation, we can introduce additional estimation schemes with memorizing mechanism
9 Problem Formulation Consider a SISO system x: system state 0 u K : control input σ: uncertainty y: output A K, b, c: known system matrices If A K is controllable, there exists K such that A K bk T is Hurwitz. Then we can rewrite the system as A = A K bk T is u = u K + K T x(t) xt () = A xt () + bu() t +σ (), t yt () = c xt (), x(0) = x = 0 The control objective is for y to track a given reference signal, r. K xt () = Axt () + but () +σ () t K
10 Adaptive Law/State Predictor The state predictor is designed to mimic the system dynamics xt ˆˆˆˆ () = Axt () + but () + σ() t + σ () t yt ˆˆ( ) = c xt () is the memorizing mechanism term σˆb σˆ is time-varying disturbance The adaptive law for σˆ is obtained by writing the error dynamics, x = xˆ x, discretizing, substituting ˆ( σ it ), and solving for x (( i+ 1) T) = 0 i: number of elapsed time steps T: duration of time step b
11 Adaptive Law σˆ σˆb is generated by the standard piecewise-constant adaptive law, T ˆ( σ it ) = Φ( T τ) dτ Φ( T ) x( it ) 0 T 1 AT Φ ( T) = e, ( T τ) dτ Γ= Φ Φ( T) 0 is generated by the feedback law, 1 D(s) is a low-pass filter. ˆˆˆ( σ t) = Ds ( )( σ() t + σ ()) t b b
12 D(s) has the form Update Law for Memory Term Ds () a = s + a The feedback law for σˆb can be solved to obtain ˆˆ () t = σ() t b σ a s
13 Control Law The control law consists of 3 parts, u 1 is designed to drive y to r in the absence of uncertainties u 2 and u 3 are designed to cancel the effects of matched and unmatched components of uncertainties respectively Matched and unmatched components determined by b is the nullspace of b T is the matched component σˆ1 is the unmatched component σˆ2 The matched component can be cancelled by simply choosing it s opposite u() t = u () t + u () t + u () t ˆ σ1 1 = b b ( ˆˆ σ + σb) ˆ σ 2 u () t = σˆ () t 2 1 u 1 is determined by dynamic version of the state predictor, omitting the uncertainty terms u1() t = rt () 1 ca b The matched component can be cancelled by simply choosing it s opposite 1 c( si A) b u ˆ 3() t = C2() s 1 2() t c( si A) b σ 1
14 Simulations Two simulation examples are presented for Small T, T = seconds Large T, T = 0.01 seconds Both cases are tested with and without memorizing mechanism present in the controller Controller A: Controller B: ˆˆ σ () t = σ() t b ˆ σ () t = 0 b a s 3/7/2014
15 Simulation for T = seconds Both controllers perform identically Output prediction matches real output Uncertainty estimations are identical for both controllers Both match real uncertainty 3/7/2014
16 Simulation for T = 0.01 seconds Controller B displays a significant steadystate error, while Controller A tightly matches the reference Uncertainty estimations more accurate for Controller A than Controller B 3/7/2014
17 Conclusions L 1 adaptive control uses high gain adaptive law (fast adaptation) to increase performance Adaptive gain is inversely proportional to hardware sampling time Sampling time is limited by hardware Memorizing mechanism is shown to improve performance for larger sampling times 3/7/2014
18 Proposed L 1 Adaptive Control Techniques 1. Extend the System Coverage of the L 1 Adaptive Controller Output feedback control for nonlinear system L 1 adaptive control design will be further extended under the output feedback framework for more challenging problems 2. Reduce Tuning Efforts of the L 1 Adaptive Controller Design a low-pass filter with minimized tuning efforts such that the controller has the adaptability for arbitrarily large nonlinear time-varying uncertainties without redesign parameters 3. Relax Hardware Requirements L 1 adaptive control with memorizing technique would give the ability to maintain performance with increased integration step-size
19 UTC Application: HVAC System Rooftop AC: possible application platform The Electrical System of an Air Conditioner (Kosterev 2007) * Nonlinear uncertainties * Changing and unknown operating condition * Etc.
20 HVAC System HVAC system design is based on the principles of thermo dynamics, fluid mechanics, and heat transfer. Sub-systems of Commercial Rooftop Refrigeration Sub-system Heating Sub-system OD Air Economizer/Ventilation Sub-system
21 Modeling of HVAC For the control of HVAC system, nominal models are needed. Complete dynamic model include RTU air-distribution systems building zones etc. Model uncertainty and disturbances are significant.
22 Multiple Control Loops Actuator Control target Compressor Supply air temperature Supply air fan Supply air duct pressure Exhaust fan Pressure of one selected zone Zone damper Zone temperature
23 Control Objectives for HVAC System Performance in off-nominal situations Maintain performance under different environments and offnominal situations System protection Prevent component damages Energy Conservation Minimize electricity consumption

24 Protection: Compressor pumps the refrigerant gas up to a high pressure and temperature. enters a condenser and condenses into its liquid phase. evaporates and returns to the compressor, and repeats the cycle.
25 Protection Overheating protection Long time running of the system; Too high temperature of the environment; Short circuit Overcooling protection Too low temperature of the environment; Over-current protection Long time running of the system; Too low voltage; Short circuit
26 Solutions: Performance Applying proposed L 1 adaptive control to HVAC System: Maintain system performance with unintended system behavior caused by changing environmental conditions and equipment degradation. Handle unintended equipment behavior in case of component faults ReduceV&V efforts
27 Solution: Energy Conservation Model based performance seeking control Adaptive control handles model uncertainties and unintended system behavior Model based performance seeking utilizing redundant actuations
28 Solution: Protection Protections Signal constraints need to be maintained Maintain input/output constraints
29 Solution: Protection (continued) Incorporate input/output constraints protection in L1 adaptive control Input constraints Direct implementation Output constraints Model based prediction and optimization Prerequisite: Get rid of unintended system behavior


30 Software Toolbox with GUI User Specifies System Information Interface Structure, time-delay, Direct Adaptive Control uncertainties bound, measurement noise and performance requirement Give the control design for this specific system and provide quantification for possible V&V analysis.
31 GUI Interface Guide the users through design process with enough information and explanation. Step 1: System information: (Nominal plant architecture -- Chosen from pre-defined classes that L 1 adaptive controller can handle). -- User can pick one option which is most close to the system. Step 2: Under this architecture, input nominal information of plants. Step 3: Uncertainty information. (bounds, etc. ) Step 4: Other information. (measurement noise, etc.)
32 Software Toolbox After the information collection is done through the interface. Software toolbox system will generate a controller automatically with a few tuning parameters. Next step, controller needs to be tuned and tested. The parameters would be tuned based on guidance.
33 Rooftop Air Conditioners 1. Analysis system and get generic modeling of the rooftop AC. Compressor unit model, dynamic behavior and etc. States: running & installed 2. Collect high-frequency problems and study the impacts to control system and energy saving. Sensor failure, economizer, thermostats and etc. 3. Using design tool-box for rooftop AC control system and testing the controller.
34 Project Milestones 1 Generic modeling of interested system (Rooftop AC) Software Toolbox Reports and slides of theoretical results Experiments and tests of adaptive control on the model


35 Department of Mechanical Engineering Thank you! U n i v e r s i t y o f C o n n e c t i c u t
Introduction. 1.1 Historical Overview. Chapter 1
 Chapter 1 Introduction 1.1 Historical Overview Research in adaptive control was motivated by the design of autopilots for highly agile aircraft that need to operate at a wide range of speeds and altitudes,
Chapter 1 Introduction 1.1 Historical Overview Research in adaptive control was motivated by the design of autopilots for highly agile aircraft that need to operate at a wide range of speeds and altitudes,
Fall 線性系統 Linear Systems. Chapter 08 State Feedback & State Estimators (SISO) Feng-Li Lian. NTU-EE Sep07 Jan08
 Feng-Li Lian. NTU-EE Sep07 Jan08") Fall 2007 線性系統 Linear Systems Chapter 08 State Feedback & State Estimators (SISO) Feng-Li Lian NTU-EE Sep07 Jan08 Materials used in these lecture notes are adopted from Linear System Theory & Design, 3rd.
Fall 2007 線性系統 Linear Systems Chapter 08 State Feedback & State Estimators (SISO) Feng-Li Lian NTU-EE Sep07 Jan08 Materials used in these lecture notes are adopted from Linear System Theory & Design, 3rd.
Control System Design
 ELEC ENG 4CL4: Control System Design Notes for Lecture #36 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Friday, April 4, 2003 3. Cascade Control Next we turn to an
ELEC ENG 4CL4: Control System Design Notes for Lecture #36 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Friday, April 4, 2003 3. Cascade Control Next we turn to an
Lecture 12. Upcoming labs: Final Exam on 12/21/2015 (Monday)10:30-12:30
10:30-12:30") 289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
Synthesis via State Space Methods
 Chapter 18 Synthesis via State Space Methods Here, we will give a state space interpretation to many of the results described earlier. In a sense, this will duplicate the earlier work. Our reason for doing
Chapter 18 Synthesis via State Space Methods Here, we will give a state space interpretation to many of the results described earlier. In a sense, this will duplicate the earlier work. Our reason for doing
Extension of L1 Adaptive Control with Applications
 University of Connecticut DigitalCommons@UConn Doctoral Dissertations University of Connecticut Graduate School 12-15-2016 Extension of L1 Adaptive Control with Applications jiaxing che University of Connecticut,
University of Connecticut DigitalCommons@UConn Doctoral Dissertations University of Connecticut Graduate School 12-15-2016 Extension of L1 Adaptive Control with Applications jiaxing che University of Connecticut,
Linear System Theory. Wonhee Kim Lecture 1. March 7, 2018
 Linear System Theory Wonhee Kim Lecture 1 March 7, 2018 1 / 22 Overview Course Information Prerequisites Course Outline What is Control Engineering? Examples of Control Systems Structure of Control Systems
Linear System Theory Wonhee Kim Lecture 1 March 7, 2018 1 / 22 Overview Course Information Prerequisites Course Outline What is Control Engineering? Examples of Control Systems Structure of Control Systems
Improving Effects of Sampling Time in Fast Adaptation-Based Control Algorithms with Applications
 University of Connecticut DigitalCommons@UConn Doctoral Dissertations University of Connecticut Graduate School 2-23-217 Improving Effects of Sampling Time in Fast Adaptation-Based Control Algorithms with
University of Connecticut DigitalCommons@UConn Doctoral Dissertations University of Connecticut Graduate School 2-23-217 Improving Effects of Sampling Time in Fast Adaptation-Based Control Algorithms with
YTÜ Mechanical Engineering Department
 YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Date: Lab
YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Date: Lab
Control Systems Design
 ELEC4410 Control Systems Design Lecture 18: State Feedback Tracking and State Estimation Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science Lecture 18:
ELEC4410 Control Systems Design Lecture 18: State Feedback Tracking and State Estimation Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science Lecture 18:
Internal Model Control of A Class of Continuous Linear Underactuated Systems
 Internal Model Control of A Class of Continuous Linear Underactuated Systems Asma Mezzi Tunis El Manar University, Automatic Control Research Laboratory, LA.R.A, National Engineering School of Tunis (ENIT),
Internal Model Control of A Class of Continuous Linear Underactuated Systems Asma Mezzi Tunis El Manar University, Automatic Control Research Laboratory, LA.R.A, National Engineering School of Tunis (ENIT),
Water terminal control solutions
 Water Terminal Control Solutions Water terminal control solutions Carrier offers a wide range of fan coil units designed to meet the needs of different systems and applications: from cabinet units in the
Water Terminal Control Solutions Water terminal control solutions Carrier offers a wide range of fan coil units designed to meet the needs of different systems and applications: from cabinet units in the
FAULT-TOLERANT CONTROL OF CHEMICAL PROCESS SYSTEMS USING COMMUNICATION NETWORKS. Nael H. El-Farra, Adiwinata Gani & Panagiotis D.
 FAULT-TOLERANT CONTROL OF CHEMICAL PROCESS SYSTEMS USING COMMUNICATION NETWORKS Nael H. El-Farra, Adiwinata Gani & Panagiotis D. Christofides Department of Chemical Engineering University of California,
FAULT-TOLERANT CONTROL OF CHEMICAL PROCESS SYSTEMS USING COMMUNICATION NETWORKS Nael H. El-Farra, Adiwinata Gani & Panagiotis D. Christofides Department of Chemical Engineering University of California,
FAULT DETECTION AND FAULT TOLERANT APPROACHES WITH AIRCRAFT APPLICATION. Andrés Marcos
 FAULT DETECTION AND FAULT TOLERANT APPROACHES WITH AIRCRAFT APPLICATION 2003 Louisiana Workshop on System Safety Andrés Marcos Dept. Aerospace Engineering and Mechanics, University of Minnesota 28 Feb,
FAULT DETECTION AND FAULT TOLERANT APPROACHES WITH AIRCRAFT APPLICATION 2003 Louisiana Workshop on System Safety Andrés Marcos Dept. Aerospace Engineering and Mechanics, University of Minnesota 28 Feb,
Uncertainty and Robustness for SISO Systems
 Uncertainty and Robustness for SISO Systems ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Outline Nature of uncertainty (models and signals). Physical sources of model uncertainty. Mathematical
Uncertainty and Robustness for SISO Systems ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Outline Nature of uncertainty (models and signals). Physical sources of model uncertainty. Mathematical
State Feedback and State Estimators Linear System Theory and Design, Chapter 8.
 1 Linear System Theory and Design, http://zitompul.wordpress.com 2 0 1 4 2 Homework 7: State Estimators (a) For the same system as discussed in previous slides, design another closed-loop state estimator,
1 Linear System Theory and Design, http://zitompul.wordpress.com 2 0 1 4 2 Homework 7: State Estimators (a) For the same system as discussed in previous slides, design another closed-loop state estimator,
Control Systems I. Lecture 2: Modeling. Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch Emilio Frazzoli
 Control Systems I Lecture 2: Modeling Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch. 2-3 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 29, 2017 E. Frazzoli
Control Systems I Lecture 2: Modeling Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch. 2-3 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 29, 2017 E. Frazzoli
CDS 101/110a: Lecture 10-1 Robust Performance
 CDS 11/11a: Lecture 1-1 Robust Performance Richard M. Murray 1 December 28 Goals: Describe how to represent uncertainty in process dynamics Describe how to analyze a system in the presence of uncertainty
CDS 11/11a: Lecture 1-1 Robust Performance Richard M. Murray 1 December 28 Goals: Describe how to represent uncertainty in process dynamics Describe how to analyze a system in the presence of uncertainty
Model Predictive Controller of Boost Converter with RLE Load
 Model Predictive Controller of Boost Converter with RLE Load N. Murali K.V.Shriram S.Muthukumar Nizwa College of Vellore Institute of Nizwa College of Technology Technology University Technology Ministry
Model Predictive Controller of Boost Converter with RLE Load N. Murali K.V.Shriram S.Muthukumar Nizwa College of Vellore Institute of Nizwa College of Technology Technology University Technology Ministry
Lecture 9. Introduction to Kalman Filtering. Linear Quadratic Gaussian Control (LQG) G. Hovland 2004
 G. Hovland 2004") MER42 Advanced Control Lecture 9 Introduction to Kalman Filtering Linear Quadratic Gaussian Control (LQG) G. Hovland 24 Announcement No tutorials on hursday mornings 8-9am I will be present in all practical
MER42 Advanced Control Lecture 9 Introduction to Kalman Filtering Linear Quadratic Gaussian Control (LQG) G. Hovland 24 Announcement No tutorials on hursday mornings 8-9am I will be present in all practical
L 1 Adaptive Output Feedback Controller to Systems of Unknown
 Proceedings of the 27 American Control Conference Marriott Marquis Hotel at Times Square New York City, USA, July 11-13, 27 WeB1.1 L 1 Adaptive Output Feedback Controller to Systems of Unknown Dimension
Proceedings of the 27 American Control Conference Marriott Marquis Hotel at Times Square New York City, USA, July 11-13, 27 WeB1.1 L 1 Adaptive Output Feedback Controller to Systems of Unknown Dimension
L 1 Adaptive Controller for a Missile Longitudinal Autopilot Design
 AIAA Guidance, Navigation and Control Conference and Exhibit 8-2 August 28, Honolulu, Hawaii AIAA 28-6282 L Adaptive Controller for a Missile Longitudinal Autopilot Design Jiang Wang Virginia Tech, Blacksburg,
AIAA Guidance, Navigation and Control Conference and Exhibit 8-2 August 28, Honolulu, Hawaii AIAA 28-6282 L Adaptive Controller for a Missile Longitudinal Autopilot Design Jiang Wang Virginia Tech, Blacksburg,
Observability and state estimation
 EE263 Autumn 2015 S Boyd and S Lall Observability and state estimation state estimation discrete-time observability observability controllability duality observers for noiseless case continuous-time observability
EE263 Autumn 2015 S Boyd and S Lall Observability and state estimation state estimation discrete-time observability observability controllability duality observers for noiseless case continuous-time observability
Decoupled Feedforward Control for an Air-Conditioning and Refrigeration System
 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 3-July, FrB1.4 Decoupled Feedforward Control for an Air-Conditioning and Refrigeration System Neera Jain, Member, IEEE, Richard
American Control Conference Marriott Waterfront, Baltimore, MD, USA June 3-July, FrB1.4 Decoupled Feedforward Control for an Air-Conditioning and Refrigeration System Neera Jain, Member, IEEE, Richard
Feedback Linearization based Arc Length Control for Gas Metal Arc Welding
 5 American Control Conference June 8-, 5. Portland, OR, USA FrA5.6 Feedback Linearization based Arc Length Control for Gas Metal Arc Welding Jesper S. Thomsen Abstract In this paper a feedback linearization
5 American Control Conference June 8-, 5. Portland, OR, USA FrA5.6 Feedback Linearization based Arc Length Control for Gas Metal Arc Welding Jesper S. Thomsen Abstract In this paper a feedback linearization
SRV02-Series Rotary Experiment # 1. Position Control. Student Handout
 SRV02-Series Rotary Experiment # 1 Position Control Student Handout SRV02-Series Rotary Experiment # 1 Position Control Student Handout 1. Objectives The objective in this experiment is to introduce the
SRV02-Series Rotary Experiment # 1 Position Control Student Handout SRV02-Series Rotary Experiment # 1 Position Control Student Handout 1. Objectives The objective in this experiment is to introduce the
Lecture 19 Observability and state estimation
 EE263 Autumn 2007-08 Stephen Boyd Lecture 19 Observability and state estimation state estimation discrete-time observability observability controllability duality observers for noiseless case continuous-time
EE263 Autumn 2007-08 Stephen Boyd Lecture 19 Observability and state estimation state estimation discrete-time observability observability controllability duality observers for noiseless case continuous-time
Goodwin, Graebe, Salgado, Prentice Hall Chapter 11. Chapter 11. Dealing with Constraints
 Chapter 11 Dealing with Constraints Topics to be covered An ubiquitous problem in control is that all real actuators have limited authority. This implies that they are constrained in amplitude and/or rate
Chapter 11 Dealing with Constraints Topics to be covered An ubiquitous problem in control is that all real actuators have limited authority. This implies that they are constrained in amplitude and/or rate
Presentation Topic 1: Feedback Control. Copyright 1998 DLMattern
 Presentation Topic 1: Feedback Control Outline Feedback Terminology Purpose of Feedback Limitations of Feedback Linear Control Design Techniques Nonlinear Control Design Techniques Rapid Prototyping Environments
Presentation Topic 1: Feedback Control Outline Feedback Terminology Purpose of Feedback Limitations of Feedback Linear Control Design Techniques Nonlinear Control Design Techniques Rapid Prototyping Environments
Design of Advanced Control Techniques for an Underwater Vehicle
 Design of Advanced Control Techniques for an Underwater Vehicle Divine Maalouf Advisors: Vincent Creuze Ahmed Chemori René Zapata 5 juillet 2012 OUTLINE I. Introduction: Problems/Challenges II. Modeling
Design of Advanced Control Techniques for an Underwater Vehicle Divine Maalouf Advisors: Vincent Creuze Ahmed Chemori René Zapata 5 juillet 2012 OUTLINE I. Introduction: Problems/Challenges II. Modeling
Iterative Learning Control Analysis and Design I
 Iterative Learning Control Analysis and Design I Electronics and Computer Science University of Southampton Southampton, SO17 1BJ, UK etar@ecs.soton.ac.uk http://www.ecs.soton.ac.uk/ Contents Basics Representations
Iterative Learning Control Analysis and Design I Electronics and Computer Science University of Southampton Southampton, SO17 1BJ, UK etar@ecs.soton.ac.uk http://www.ecs.soton.ac.uk/ Contents Basics Representations
BERMAD Irrigation. BIC2000 Weather Station SYSTEM GUIDE VERSIONS : BIC ; PC 4.90
 BIC2000 Weather Station SYSTEM GUIDE VERSIONS : BIC2000 3.92; PC 4.90 CONTENTS 1. SYSTEM OVERVIEW 3 2. WEATHER STATION SETUP 4 2.1 ISS AND CONSOLE SETUP 4 2. RF RTU SYSTEM SETUP 5 2.2 BIC2000 WEATHER STATION
BIC2000 Weather Station SYSTEM GUIDE VERSIONS : BIC2000 3.92; PC 4.90 CONTENTS 1. SYSTEM OVERVIEW 3 2. WEATHER STATION SETUP 4 2.1 ISS AND CONSOLE SETUP 4 2. RF RTU SYSTEM SETUP 5 2.2 BIC2000 WEATHER STATION
Raktim Bhattacharya. . AERO 632: Design of Advance Flight Control System. Preliminaries
 . AERO 632: of Advance Flight Control System. Preliminaries Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. Preliminaries Signals & Systems Laplace
. AERO 632: of Advance Flight Control System. Preliminaries Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. Preliminaries Signals & Systems Laplace
Decentralized Feedback Structures of a Vapor Compression Cycle System
 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 18, NO. 1, JANUARY 2010 185 Decentralized Feedback Structures of a Vapor Compression Cycle System Neera Jain, Bin Li, Michael Keir, Brandon Hencey,
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 18, NO. 1, JANUARY 2010 185 Decentralized Feedback Structures of a Vapor Compression Cycle System Neera Jain, Bin Li, Michael Keir, Brandon Hencey,
Nonlinear Adaptive Robust Control. Theory and Applications to the Integrated Design of Intelligent and Precision Mechatronic Systems.
 A Short Course on Nonlinear Adaptive Robust Control Theory and Applications to the Integrated Design of Intelligent and Precision Mechatronic Systems Bin Yao Intelligent and Precision Control Laboratory
A Short Course on Nonlinear Adaptive Robust Control Theory and Applications to the Integrated Design of Intelligent and Precision Mechatronic Systems Bin Yao Intelligent and Precision Control Laboratory
Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process
 Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process D.Angeline Vijula #, Dr.N.Devarajan * # Electronics and Instrumentation Engineering Sri Ramakrishna
Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process D.Angeline Vijula #, Dr.N.Devarajan * # Electronics and Instrumentation Engineering Sri Ramakrishna
Identification and Control of Mechatronic Systems
 Identification and Control of Mechatronic Systems Philadelphia University, Jordan NATO - ASI Advanced All-Terrain Autonomous Systems Workshop August 15 24, 2010 Cesme-Izmir, Turkey Overview Mechatronics
Identification and Control of Mechatronic Systems Philadelphia University, Jordan NATO - ASI Advanced All-Terrain Autonomous Systems Workshop August 15 24, 2010 Cesme-Izmir, Turkey Overview Mechatronics
MATH4406 (Control Theory) Unit 1: Introduction Prepared by Yoni Nazarathy, July 21, 2012
 Unit 1: Introduction Prepared by Yoni Nazarathy, July 21, 2012") MATH4406 (Control Theory) Unit 1: Introduction Prepared by Yoni Nazarathy, July 21, 2012 Unit Outline Introduction to the course: Course goals, assessment, etc... What is Control Theory A bit of jargon,
MATH4406 (Control Theory) Unit 1: Introduction Prepared by Yoni Nazarathy, July 21, 2012 Unit Outline Introduction to the course: Course goals, assessment, etc... What is Control Theory A bit of jargon,
Multivariable MRAC with State Feedback for Output Tracking
 29 American Control Conference Hyatt Regency Riverfront, St. Louis, MO, USA June 1-12, 29 WeA18.5 Multivariable MRAC with State Feedback for Output Tracking Jiaxing Guo, Yu Liu and Gang Tao Department
29 American Control Conference Hyatt Regency Riverfront, St. Louis, MO, USA June 1-12, 29 WeA18.5 Multivariable MRAC with State Feedback for Output Tracking Jiaxing Guo, Yu Liu and Gang Tao Department
Nonlinear Control Systems
 Nonlinear Control Systems António Pedro Aguiar pedro@isr.ist.utl.pt 5. Input-Output Stability DEEC PhD Course http://users.isr.ist.utl.pt/%7epedro/ncs2012/ 2012 1 Input-Output Stability y = Hu H denotes
Nonlinear Control Systems António Pedro Aguiar pedro@isr.ist.utl.pt 5. Input-Output Stability DEEC PhD Course http://users.isr.ist.utl.pt/%7epedro/ncs2012/ 2012 1 Input-Output Stability y = Hu H denotes
Topic # Feedback Control. State-Space Systems Closed-loop control using estimators and regulators. Dynamics output feedback
 Topic #17 16.31 Feedback Control State-Space Systems Closed-loop control using estimators and regulators. Dynamics output feedback Back to reality Copyright 21 by Jonathan How. All Rights reserved 1 Fall
Topic #17 16.31 Feedback Control State-Space Systems Closed-loop control using estimators and regulators. Dynamics output feedback Back to reality Copyright 21 by Jonathan How. All Rights reserved 1 Fall
EE 474 Lab Part 2: Open-Loop and Closed-Loop Control (Velocity Servo)
") Contents EE 474 Lab Part 2: Open-Loop and Closed-Loop Control (Velocity Servo) 1 Introduction 1 1.1 Discovery learning in the Controls Teaching Laboratory.............. 1 1.2 A Laboratory Notebook...............................
Contents EE 474 Lab Part 2: Open-Loop and Closed-Loop Control (Velocity Servo) 1 Introduction 1 1.1 Discovery learning in the Controls Teaching Laboratory.............. 1 1.2 A Laboratory Notebook...............................
Department of Aerospace Engineering and Mechanics University of Minnesota Written Preliminary Examination: Control Systems Friday, April 9, 2010
 Department of Aerospace Engineering and Mechanics University of Minnesota Written Preliminary Examination: Control Systems Friday, April 9, 2010 Problem 1: Control of Short Period Dynamics Consider the
Department of Aerospace Engineering and Mechanics University of Minnesota Written Preliminary Examination: Control Systems Friday, April 9, 2010 Problem 1: Control of Short Period Dynamics Consider the
D(s) G(s) A control system design definition
 G(s) A control system design definition") R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
Feedback Structures for Vapor Compression Cycle Systems
 Proceedings of the 27 American Control Conference Marriott Marquis Hotel at imes Square New York City, USA, July 11-, 27 FrB5.1 Feedback Structures for Vapor Compression Cycle Systems Michael C. Keir,
Proceedings of the 27 American Control Conference Marriott Marquis Hotel at imes Square New York City, USA, July 11-, 27 FrB5.1 Feedback Structures for Vapor Compression Cycle Systems Michael C. Keir,
Control System Design
 ELEC ENG 4CL4: Control System Design Notes for Lecture #24 Wednesday, March 10, 2004 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Remedies We next turn to the question
ELEC ENG 4CL4: Control System Design Notes for Lecture #24 Wednesday, March 10, 2004 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Remedies We next turn to the question
Integral action in state feedback control
 Automatic Control 1 in state feedback control Prof. Alberto Bemporad University of Trento Academic year 21-211 Prof. Alberto Bemporad (University of Trento) Automatic Control 1 Academic year 21-211 1 /
Automatic Control 1 in state feedback control Prof. Alberto Bemporad University of Trento Academic year 21-211 Prof. Alberto Bemporad (University of Trento) Automatic Control 1 Academic year 21-211 1 /
Dr Ian R. Manchester
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Coupled Drive Apparatus Modelling and Simulation
 University of Ljubljana Faculty of Electrical Engineering Victor Centellas Gil Coupled Drive Apparatus Modelling and Simulation Diploma thesis Menthor: prof. dr. Maja Atanasijević-Kunc Ljubljana, 2015
University of Ljubljana Faculty of Electrical Engineering Victor Centellas Gil Coupled Drive Apparatus Modelling and Simulation Diploma thesis Menthor: prof. dr. Maja Atanasijević-Kunc Ljubljana, 2015
NEC PerforCache. Influence on M-Series Disk Array Behavior and Performance. Version 1.0
 NEC PerforCache Influence on M-Series Disk Array Behavior and Performance. Version 1.0 Preface This document describes L2 (Level 2) Cache Technology which is a feature of NEC M-Series Disk Array implemented
NEC PerforCache Influence on M-Series Disk Array Behavior and Performance. Version 1.0 Preface This document describes L2 (Level 2) Cache Technology which is a feature of NEC M-Series Disk Array implemented
STATE AND OUTPUT FEEDBACK CONTROL IN MODEL-BASED NETWORKED CONTROL SYSTEMS
 SAE AND OUPU FEEDBACK CONROL IN MODEL-BASED NEWORKED CONROL SYSEMS Luis A Montestruque, Panos J Antsalis Abstract In this paper the control of a continuous linear plant where the sensor is connected to
SAE AND OUPU FEEDBACK CONROL IN MODEL-BASED NEWORKED CONROL SYSEMS Luis A Montestruque, Panos J Antsalis Abstract In this paper the control of a continuous linear plant where the sensor is connected to
Seminar Course 392N Spring2011. ee392n - Spring 2011 Stanford University. Intelligent Energy Systems 1
 Seminar Course 392N Spring211 Lecture 3 Intelligent Energy Systems: Control and Monitoring Basics Dimitry Gorinevsky Intelligent Energy Systems 1 Traditional Grid Worlds Largest Machine! 33 utilities 15,
Seminar Course 392N Spring211 Lecture 3 Intelligent Energy Systems: Control and Monitoring Basics Dimitry Gorinevsky Intelligent Energy Systems 1 Traditional Grid Worlds Largest Machine! 33 utilities 15,
CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER
 114 CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER 5.1 INTRODUCTION Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. It also refers
114 CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER 5.1 INTRODUCTION Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. It also refers
An Introduction to Control Systems
 An Introduction to Control Systems Signals and Systems: 3C1 Control Systems Handout 1 Dr. David Corrigan Electronic and Electrical Engineering corrigad@tcd.ie November 21, 2012 Recall the concept of a
An Introduction to Control Systems Signals and Systems: 3C1 Control Systems Handout 1 Dr. David Corrigan Electronic and Electrical Engineering corrigad@tcd.ie November 21, 2012 Recall the concept of a
Lecture 12. AO Control Theory
 Lecture 12 AO Control Theory Claire Max with many thanks to Don Gavel and Don Wiberg UC Santa Cruz February 18, 2016 Page 1 What are control systems? Control is the process of making a system variable
Lecture 12 AO Control Theory Claire Max with many thanks to Don Gavel and Don Wiberg UC Santa Cruz February 18, 2016 Page 1 What are control systems? Control is the process of making a system variable
Plan of the Lecture. Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control
 Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic:
Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic:
Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control
 Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control Goal: understand the difference between open-loop and closed-loop (feedback)
Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control Goal: understand the difference between open-loop and closed-loop (feedback)
Automatic Control II Computer exercise 3. LQG Design
 Uppsala University Information Technology Systems and Control HN,FS,KN 2000-10 Last revised by HR August 16, 2017 Automatic Control II Computer exercise 3 LQG Design Preparations: Read Chapters 5 and 9
Uppsala University Information Technology Systems and Control HN,FS,KN 2000-10 Last revised by HR August 16, 2017 Automatic Control II Computer exercise 3 LQG Design Preparations: Read Chapters 5 and 9
QFT Framework for Robust Tuning of Power System Stabilizers
 45-E-PSS-75 QFT Framework for Robust Tuning of Power System Stabilizers Seyyed Mohammad Mahdi Alavi, Roozbeh Izadi-Zamanabadi Department of Control Engineering, Aalborg University, Denmark Correspondence
45-E-PSS-75 QFT Framework for Robust Tuning of Power System Stabilizers Seyyed Mohammad Mahdi Alavi, Roozbeh Izadi-Zamanabadi Department of Control Engineering, Aalborg University, Denmark Correspondence
Chapter 7 Interconnected Systems and Feedback: Well-Posedness, Stability, and Performance 7. Introduction Feedback control is a powerful approach to o
 Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A. Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter 7 Interconnected
Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A. Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter 7 Interconnected
Request Ensure that this Instruction Manual is delivered to the end users and the maintenance manager.
 Request Ensure that this Instruction Manual is delivered to the end users and the maintenance manager. 1 -A - Introduction - Thank for your purchasing MITSUBISHI ELECTRIC MELPRO TM D Series Digital Protection
Request Ensure that this Instruction Manual is delivered to the end users and the maintenance manager. 1 -A - Introduction - Thank for your purchasing MITSUBISHI ELECTRIC MELPRO TM D Series Digital Protection
DERIVATIVE FREE OUTPUT FEEDBACK ADAPTIVE CONTROL
 DERIVATIVE FREE OUTPUT FEEDBACK ADAPTIVE CONTROL Tansel YUCELEN, * Kilsoo KIM, and Anthony J. CALISE Georgia Institute of Technology, Yucelen Atlanta, * GA 30332, USA * tansel@gatech.edu AIAA Guidance,
DERIVATIVE FREE OUTPUT FEEDBACK ADAPTIVE CONTROL Tansel YUCELEN, * Kilsoo KIM, and Anthony J. CALISE Georgia Institute of Technology, Yucelen Atlanta, * GA 30332, USA * tansel@gatech.edu AIAA Guidance,
Outline. Classical Control. Lecture 1
 Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
MODELLING ANALYSIS & DESIGN OF DSP BASED NOVEL SPEED SENSORLESS VECTOR CONTROLLER FOR INDUCTION MOTOR DRIVE
 International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 6, Issue 3, March, 2015, pp. 70-81, Article ID: IJARET_06_03_008 Available online at http://www.iaeme.com/ijaret/issues.asp?jtypeijaret&vtype=6&itype=3
International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 6, Issue 3, March, 2015, pp. 70-81, Article ID: IJARET_06_03_008 Available online at http://www.iaeme.com/ijaret/issues.asp?jtypeijaret&vtype=6&itype=3
Vortex Model Based Adaptive Flight Control Using Synthetic Jets
 Vortex Model Based Adaptive Flight Control Using Synthetic Jets Jonathan Muse, Andrew Tchieu, Ali Kutay, Rajeev Chandramohan, Anthony Calise, and Anthony Leonard Department of Aerospace Engineering Georgia
Vortex Model Based Adaptive Flight Control Using Synthetic Jets Jonathan Muse, Andrew Tchieu, Ali Kutay, Rajeev Chandramohan, Anthony Calise, and Anthony Leonard Department of Aerospace Engineering Georgia
Output Adaptive Model Reference Control of Linear Continuous State-Delay Plant
 Output Adaptive Model Reference Control of Linear Continuous State-Delay Plant Boris M. Mirkin and Per-Olof Gutman Faculty of Agricultural Engineering Technion Israel Institute of Technology Haifa 3, Israel
Output Adaptive Model Reference Control of Linear Continuous State-Delay Plant Boris M. Mirkin and Per-Olof Gutman Faculty of Agricultural Engineering Technion Israel Institute of Technology Haifa 3, Israel
CONTROL OF DIGITAL SYSTEMS
 AUTOMATIC CONTROL AND SYSTEM THEORY CONTROL OF DIGITAL SYSTEMS Gianluca Palli Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna Email: gianluca.palli@unibo.it
AUTOMATIC CONTROL AND SYSTEM THEORY CONTROL OF DIGITAL SYSTEMS Gianluca Palli Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna Email: gianluca.palli@unibo.it
ANALYZING REAL TIME LINEAR CONTROL SYSTEMS USING SOFTWARE VERIFICATION. Parasara Sridhar Duggirala UConn Mahesh Viswanathan UIUC
 ANALYZING REAL TIME LINEAR CONTROL SYSTEMS USING SOFTWARE VERIFICATION Parasara Sridhar Duggirala UConn Mahesh Viswanathan UIUC Real-Time Systems Linear Control Systems Verification Verification Control
ANALYZING REAL TIME LINEAR CONTROL SYSTEMS USING SOFTWARE VERIFICATION Parasara Sridhar Duggirala UConn Mahesh Viswanathan UIUC Real-Time Systems Linear Control Systems Verification Verification Control
A Software Tool Applying Linear Control Methods to Satellite Thermal Analysis. Martin Altenburg Johannes Burkhardt (EADS Astrium, Germany)
") 119 Appendix H A Software Tool Applying Linear Control Methods to Satellite Thermal Analysis Martin Altenburg Johannes Burkhardt (EADS Astrium, Germany) 120 A Software Tool Applying Linear Control Methods
119 Appendix H A Software Tool Applying Linear Control Methods to Satellite Thermal Analysis Martin Altenburg Johannes Burkhardt (EADS Astrium, Germany) 120 A Software Tool Applying Linear Control Methods
Aircraft Stability & Control
 Aircraft Stability & Control Textbook Automatic control of Aircraft and missiles 2 nd Edition by John H Blakelock References Aircraft Dynamics and Automatic Control - McRuler & Ashkenas Aerodynamics, Aeronautics
Aircraft Stability & Control Textbook Automatic control of Aircraft and missiles 2 nd Edition by John H Blakelock References Aircraft Dynamics and Automatic Control - McRuler & Ashkenas Aerodynamics, Aeronautics
Exam. 135 minutes, 15 minutes reading time
 Exam August 6, 208 Control Systems II (5-0590-00) Dr. Jacopo Tani Exam Exam Duration: 35 minutes, 5 minutes reading time Number of Problems: 35 Number of Points: 47 Permitted aids: 0 pages (5 sheets) A4.
Exam August 6, 208 Control Systems II (5-0590-00) Dr. Jacopo Tani Exam Exam Duration: 35 minutes, 5 minutes reading time Number of Problems: 35 Number of Points: 47 Permitted aids: 0 pages (5 sheets) A4.
Analysis and Synthesis of Single-Input Single-Output Control Systems
 Lino Guzzella Analysis and Synthesis of Single-Input Single-Output Control Systems l+kja» \Uja>)W2(ja»\ um Contents 1 Definitions and Problem Formulations 1 1.1 Introduction 1 1.2 Definitions 1 1.2.1 Systems
Lino Guzzella Analysis and Synthesis of Single-Input Single-Output Control Systems l+kja» \Uja>)W2(ja»\ um Contents 1 Definitions and Problem Formulations 1 1.1 Introduction 1 1.2 Definitions 1 1.2.1 Systems
QUANTIZED SYSTEMS AND CONTROL. Daniel Liberzon. DISC HS, June Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign
 QUANTIZED SYSTEMS AND CONTROL Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign DISC HS, June 2003 HYBRID CONTROL Plant: u y
QUANTIZED SYSTEMS AND CONTROL Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign DISC HS, June 2003 HYBRID CONTROL Plant: u y
A Novel Method on Min Max Limit Protection for Aircraft Engine Control
 A Novel Method on Min Max Limit Protection for Aircraft Engine Control Wenjun Shu 1, Bing Yu and Hongwei Ke 1 1 1 Nanjing University of Aeronautics & Astronautics, college of energy and power engineering,
A Novel Method on Min Max Limit Protection for Aircraft Engine Control Wenjun Shu 1, Bing Yu and Hongwei Ke 1 1 1 Nanjing University of Aeronautics & Astronautics, college of energy and power engineering,
ChE 6303 Advanced Process Control
 ChE 6303 Advanced Process Control Teacher: Dr. M. A. A. Shoukat Choudhury, Email: shoukat@buet.ac.bd Syllabus: 1. SISO control systems: Review of the concepts of process dynamics and control, process models,
ChE 6303 Advanced Process Control Teacher: Dr. M. A. A. Shoukat Choudhury, Email: shoukat@buet.ac.bd Syllabus: 1. SISO control systems: Review of the concepts of process dynamics and control, process models,
Chapter 3. LQ, LQG and Control System Design. Dutch Institute of Systems and Control
 Chapter 3 LQ, LQG and Control System H 2 Design Overview LQ optimization state feedback LQG optimization output feedback H 2 optimization non-stochastic version of LQG Application to feedback system design
Chapter 3 LQ, LQG and Control System H 2 Design Overview LQ optimization state feedback LQG optimization output feedback H 2 optimization non-stochastic version of LQG Application to feedback system design
Pole placement control: state space and polynomial approaches Lecture 2
 : state space and polynomial approaches Lecture 2 : a state O. Sename 1 1 Gipsa-lab, CNRS-INPG, FRANCE Olivier.Sename@gipsa-lab.fr www.gipsa-lab.fr/ o.sename -based November 21, 2017 Outline : a state
: state space and polynomial approaches Lecture 2 : a state O. Sename 1 1 Gipsa-lab, CNRS-INPG, FRANCE Olivier.Sename@gipsa-lab.fr www.gipsa-lab.fr/ o.sename -based November 21, 2017 Outline : a state
Laplace Transforms Chapter 3
 Laplace Transforms Important analytical method for solving linear ordinary differential equations. - Application to nonlinear ODEs? Must linearize first. Laplace transforms play a key role in important
Laplace Transforms Important analytical method for solving linear ordinary differential equations. - Application to nonlinear ODEs? Must linearize first. Laplace transforms play a key role in important
Process Unit Control System Design
 Process Unit Control System Design 1. Introduction 2. Influence of process design 3. Control degrees of freedom 4. Selection of control system variables 5. Process safety Introduction Control system requirements»
Process Unit Control System Design 1. Introduction 2. Influence of process design 3. Control degrees of freedom 4. Selection of control system variables 5. Process safety Introduction Control system requirements»
L 1 Adaptive Controller for Multi Input Multi Output Systems in the Presence of Unmatched Disturbances
 28 American Control Conference Westin Seattle Hotel, Seattle, Washington, USA June -3, 28 FrA4.4 L Adaptive Controller for Multi Input Multi Output Systems in the Presence of Unmatched Disturbances Chengyu
28 American Control Conference Westin Seattle Hotel, Seattle, Washington, USA June -3, 28 FrA4.4 L Adaptive Controller for Multi Input Multi Output Systems in the Presence of Unmatched Disturbances Chengyu
Comparing Realtime Energy-Optimizing Controllers for Heat Pumps
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Comparing Realtime Energy-Optimizing Controllers for Heat Pumps Burns, D.J.; Bortoff, S.A.; Laughman, C.R.; Guay, M. TR2018-100 July 13, 2018
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Comparing Realtime Energy-Optimizing Controllers for Heat Pumps Burns, D.J.; Bortoff, S.A.; Laughman, C.R.; Guay, M. TR2018-100 July 13, 2018
PROCESS DESIGN AND CONTROL Offset-Free Tracking of Model Predictive Control with Model Mismatch: Experimental Results
 3966 Ind. Eng. Chem. Res. 2005, 44, 3966-3972 PROCESS DESIGN AND CONTROL Offset-Free Tracking of Model Predictive Control with Model Mismatch: Experimental Results Audun Faanes and Sigurd Skogestad* Department
3966 Ind. Eng. Chem. Res. 2005, 44, 3966-3972 PROCESS DESIGN AND CONTROL Offset-Free Tracking of Model Predictive Control with Model Mismatch: Experimental Results Audun Faanes and Sigurd Skogestad* Department
Optimizing Control of Hot Blast Stoves in Staggered Parallel Operation
 Proceedings of the 17th World Congress The International Federation of Automatic Control Optimizing Control of Hot Blast Stoves in Staggered Parallel Operation Akın Şahin and Manfred Morari Automatic Control
Proceedings of the 17th World Congress The International Federation of Automatic Control Optimizing Control of Hot Blast Stoves in Staggered Parallel Operation Akın Şahin and Manfred Morari Automatic Control
Comparison of Feedback Controller for Link Stabilizing Units of the Laser Based Synchronization System used at the European XFEL
 Comparison of Feedback Controller for Link Stabilizing Units of the Laser Based Synchronization System used at the European XFEL M. Heuer 1 G. Lichtenberg 2 S. Pfeiffer 1 H. Schlarb 1 1 Deutsches Elektronen
Comparison of Feedback Controller for Link Stabilizing Units of the Laser Based Synchronization System used at the European XFEL M. Heuer 1 G. Lichtenberg 2 S. Pfeiffer 1 H. Schlarb 1 1 Deutsches Elektronen
CHAPTER 6 FAST OUTPUT SAMPLING CONTROL TECHNIQUE
 80 CHAPTER 6 FAST OUTPUT SAMPLING CONTROL TECHNIQUE 6.1 GENERAL In this chapter a control strategy for hyperthermia system is developed using fast output sampling feedback control law which is a type of
80 CHAPTER 6 FAST OUTPUT SAMPLING CONTROL TECHNIQUE 6.1 GENERAL In this chapter a control strategy for hyperthermia system is developed using fast output sampling feedback control law which is a type of
MODELLING ANALYSIS & DESIGN OF DSP BASED NOVEL SPEED SENSORLESS VECTOR CONTROLLER FOR INDUCTION MOTOR DRIVE
 INTERNATIONAL JOURNAL OF ADVANCED RESEARCH IN ENGINEERING International Journal of Advanced Research in Engineering and Technology (IJARET), ISSN 0976 6480(Print), ISSN 0976 6499(Online), AND TECHNOLOGY
INTERNATIONAL JOURNAL OF ADVANCED RESEARCH IN ENGINEERING International Journal of Advanced Research in Engineering and Technology (IJARET), ISSN 0976 6480(Print), ISSN 0976 6499(Online), AND TECHNOLOGY
Lab 3: Quanser Hardware and Proportional Control
 Lab 3: Quanser Hardware and Proportional Control The worst wheel of the cart makes the most noise. Benjamin Franklin 1 Objectives The goal of this lab is to: 1. familiarize you with Quanser s QuaRC tools
Lab 3: Quanser Hardware and Proportional Control The worst wheel of the cart makes the most noise. Benjamin Franklin 1 Objectives The goal of this lab is to: 1. familiarize you with Quanser s QuaRC tools
H 2 Adaptive Control. Tansel Yucelen, Anthony J. Calise, and Rajeev Chandramohan. WeA03.4
 1 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 3-July, 1 WeA3. H Adaptive Control Tansel Yucelen, Anthony J. Calise, and Rajeev Chandramohan Abstract Model reference adaptive
1 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 3-July, 1 WeA3. H Adaptive Control Tansel Yucelen, Anthony J. Calise, and Rajeev Chandramohan Abstract Model reference adaptive
Aircraft Turbofan Engine Health Estimation Using Constrained Kalman Filtering. Funded by the NASA Aviation Safety Program June 16, 2003
 Aircraft Turbofan Engine Health Estimation Using Constrained Kalman Filtering Dan Simon Electrical Engineering Dept. Cleveland State University Cleveland, Ohio Donald L. Simon US Army Research Laboratory
Aircraft Turbofan Engine Health Estimation Using Constrained Kalman Filtering Dan Simon Electrical Engineering Dept. Cleveland State University Cleveland, Ohio Donald L. Simon US Army Research Laboratory
Control System Design
 ELEC4410 Control System Design Lecture 19: Feedback from Estimated States and Discrete-Time Control Design Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science
ELEC4410 Control System Design Lecture 19: Feedback from Estimated States and Discrete-Time Control Design Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science
06 Feedback Control System Characteristics The role of error signals to characterize feedback control system performance.
 Chapter 06 Feedback 06 Feedback Control System Characteristics The role of error signals to characterize feedback control system performance. Lesson of the Course Fondamenti di Controlli Automatici of
Chapter 06 Feedback 06 Feedback Control System Characteristics The role of error signals to characterize feedback control system performance. Lesson of the Course Fondamenti di Controlli Automatici of
INTEGRATED ARCHITECTURE OF ACTUATOR FAULT DIAGNOSIS AND ACCOMMODATION
 INTEGRATED ARCHITECTURE OF ACTUATOR FAULT DIAGNOSIS AND ACCOMMODATION Rim Hamdaoui, Safa Guesmi, Rafika Elharabi and Med Naceur Abdelkrim UR. Modelling, Analysis and Systems Control, University of Gabes,
INTEGRATED ARCHITECTURE OF ACTUATOR FAULT DIAGNOSIS AND ACCOMMODATION Rim Hamdaoui, Safa Guesmi, Rafika Elharabi and Med Naceur Abdelkrim UR. Modelling, Analysis and Systems Control, University of Gabes,
COMBINED ADAPTIVE CONTROLLER FOR UAV GUIDANCE
 COMBINED ADAPTIVE CONTROLLER FOR UAV GUIDANCE B.R. Andrievsky, A.L. Fradkov Institute for Problems of Mechanical Engineering of Russian Academy of Sciences 61, Bolshoy av., V.O., 199178 Saint Petersburg,
COMBINED ADAPTIVE CONTROLLER FOR UAV GUIDANCE B.R. Andrievsky, A.L. Fradkov Institute for Problems of Mechanical Engineering of Russian Academy of Sciences 61, Bolshoy av., V.O., 199178 Saint Petersburg,
Acknowledgements. Control System. Tracking. CS122A: Embedded System Design 4/24/2007. A Simple Introduction to Embedded Control Systems (PID Control)
") Acknowledgements A Simple Introduction to Embedded Control Systems (PID Control) The material in this lecture is adapted from: F. Vahid and T. Givargis, Embedded System Design A Unified Hardware/Software
Acknowledgements A Simple Introduction to Embedded Control Systems (PID Control) The material in this lecture is adapted from: F. Vahid and T. Givargis, Embedded System Design A Unified Hardware/Software
Structural Control: Introduction and Fruitful Research Areas
 Structural Control: Introduction and Fruitful Research Areas T.T. Soong State University of New York at Buffalo Buffalo, New York 14260, USA Active (Responsive) Structures Under Normal Load Load Under
Structural Control: Introduction and Fruitful Research Areas T.T. Soong State University of New York at Buffalo Buffalo, New York 14260, USA Active (Responsive) Structures Under Normal Load Load Under
Synergetic Synthesis Of Dc-Dc Boost Converter Controllers: Theory And Experimental Analysis
 Synergetic Synthesis Of Dc-Dc Boost Converter Controllers: Theory And Experimental Analysis A. Kolesnikov ( + ), G. Veselov ( + ), A. Kolesnikov ( + ), A. Monti ( ++ ), F. Ponci ( ++ ), E. Santi ( ++ ),
Synergetic Synthesis Of Dc-Dc Boost Converter Controllers: Theory And Experimental Analysis A. Kolesnikov ( + ), G. Veselov ( + ), A. Kolesnikov ( + ), A. Monti ( ++ ), F. Ponci ( ++ ), E. Santi ( ++ ),
Aircraft Turbofan Engine Health Estimation Using Constrained Kalman Filtering
 Cleveland State University EngagedScholarship@CSU Electrical Engineering & Computer Science Faculty Publications Electrical Engineering & Computer Science Department 6-16-2003 Aircraft Turbofan Engine
Cleveland State University EngagedScholarship@CSU Electrical Engineering & Computer Science Faculty Publications Electrical Engineering & Computer Science Department 6-16-2003 Aircraft Turbofan Engine
Filter Design for Feedback-loop Trade-off of L 1 Adaptive Controller: A Linear Matrix Inequality Approach
 AIAA Guidance, Navigation and Control Conference and Exhibit 18-21 August 2008, Honolulu, Hawaii AIAA 2008-6280 Filter Design for Feedback-loop Trade-off of L 1 Adaptive Controller: A Linear Matrix Inequality
AIAA Guidance, Navigation and Control Conference and Exhibit 18-21 August 2008, Honolulu, Hawaii AIAA 2008-6280 Filter Design for Feedback-loop Trade-off of L 1 Adaptive Controller: A Linear Matrix Inequality
CONTROL SYSTEMS, ROBOTICS, AND AUTOMATION Vol. III Controller Design - Boris Lohmann
 CONROL SYSEMS, ROBOICS, AND AUOMAION Vol. III Controller Design - Boris Lohmann CONROLLER DESIGN Boris Lohmann Institut für Automatisierungstechnik, Universität Bremen, Germany Keywords: State Feedback
CONROL SYSEMS, ROBOICS, AND AUOMAION Vol. III Controller Design - Boris Lohmann CONROLLER DESIGN Boris Lohmann Institut für Automatisierungstechnik, Universität Bremen, Germany Keywords: State Feedback
CBE495 LECTURE IV MODEL PREDICTIVE CONTROL
 What is Model Predictive Control (MPC)? CBE495 LECTURE IV MODEL PREDICTIVE CONTROL Professor Dae Ryook Yang Fall 2013 Dept. of Chemical and Biological Engineering Korea University * Some parts are from
What is Model Predictive Control (MPC)? CBE495 LECTURE IV MODEL PREDICTIVE CONTROL Professor Dae Ryook Yang Fall 2013 Dept. of Chemical and Biological Engineering Korea University * Some parts are from