Bayesian Methods and Uncertainty Quantification for Nonlinear Inverse Problems
|
|
|
- Kimberly Hunt
- 5 years ago
- Views:
Transcription
1 Bayesian Methods and Uncertainty Quantification for Nonlinear Inverse Problems John Bardsley, University of Montana Collaborators: H. Haario, J. Kaipio, M. Laine, Y. Marzouk, A. Seppänen, A. Solonen, Z. Wang Technical University Denmark, December 216
2 Outline Nonlinear Inverse Problems Setup Randomize-then-Optimize (RTO) Test Cases: small # of parameters examples electrical impedance tomography l 1 priors, i.e., TV and Besov priors
3 Now Consider a Nonlinear Statistical Model Now assume the non-linear, Gaussian statistical model where y = A(x) + ɛ, y R m is the vector of observations; x R n is the vector of unknown parameters; A : R n R m is nonlinear; ɛ N (, λ 1 I m ), i.e., ɛ is i.i.d. Gaussian with mean and variance λ 1.
4 Toy example Consider the following nonlinear, two-parameter pre-whitened model. y i = x 1 (1 exp( x 2 t i )) + ɛ i, ɛ i N(, σ 2 ), i = 1, 2, 3, 4, 5, with t i = 2i 1, σ =.136, and y = [.76,.258,.369,.492,.559]. GOAL: estimate a probability distribution for x = (x 1, x 2 ).
5 Toy example continued: the Bayesian posterior p(x 1, x 2 y) p(x 1 y) = x 2 p(x 1, x 2 y)dx 2 p(x 2 y) = x 1 p(x 1, x 2 y)dx DRAM RTO corrected RTO θ θ θ θ1 9.2 p(x 1, x 2 y)
6 Compute Samples Using Markov Chain Monte Carlo Markov chain Monte Carlo (MCMC) is a framework for sampling from a (potentially un-normalized) probability distribution. Some Classical MCMC algorithms Gibbs sampling (talk 1: for sampling from p(x, λ, δ y)) Metropolis-Hastings Adaptive Metropolis (talk 1: for sampling from p(λ, δ y)) Inverse Problems: high-dimensional posterior Posterior is harder to explore with classical algorithms Chains become more correlated, sampling becomes inefficient
7 Metropolis-Hastings Definitions: p(x y) x k q(x x k ) x posterior (target) density random variable of the Markov chain at step k proposal density given x k random variable from the proposal A chain of samples {x, x 1, } is generated by: 1. Start at x 2. For k = 1, 2, K 2.1 sample x q(x x{ k 1 ) } 2.2 calculate α = min p(x y)q(x k 1 x ) p(x k 1 y)q(x x k 1 ) {, 1 x 2.3 x k with probability α = x k 1 with probability 1 α
8 Metropolis-Hastings Demonstration: chifeng.scripts.mit.edu/stuff/mcmc-demo/
9 Randomize-then-Optimize (RTO): defines a proposal q Assumption: RTO requires that the posterior to have least squares form, i.e., p(x y) exp ( 1 ) 2 Ā(x) ȳ 2.
10 Randomize-then-Optimize (RTO): defines a proposal q Assumption: RTO requires that the posterior to have least squares form, i.e., p(x y) exp ( 1 ) 2 Ā(x) ȳ 2. Given that the likelihood function has the form p(y x) exp ( λ ) 2 A(x) y 2, for which priors p(x) will the posterior density function have least squares form? p(x y) p(y x)p(x).
11 Test Case 1: Uniform prior In small parameter cases, it is often true that p(y x) = for x / Ω. Then we can choose as a prior p(x) defined by x U(Ω), where U denotes the multivariate uniform distribution.
12 Test Case 1: Uniform prior In small parameter cases, it is often true that p(y x) = for x / Ω. Then we can choose as a prior p(x) defined by x U(Ω), where U denotes the multivariate uniform distribution. Then p(x) = constant on Ω, and we have p(x y) p(y x)p(x) exp ( 1 ) 2 A(x) y 2. Thus can use RTO to sample from p(x y).
13 Test Case 2: Gaussian prior When a Gaussian prior is chosen, ( p(x) exp 1 ) 2 (x x ) T L(x x ), the posterior can also be written in least squares form: p(x y) p(y x)p(x) ( exp 1 2 A(x) y 2 1 ) 2 (x x ) T L(x x )
14 Test Case 2: Gaussian prior When a Gaussian prior is chosen, ( p(x) exp 1 ) 2 (x x ) T L(x x ), the posterior can also be written in least squares form: p(x y) p(y x)p(x) ( exp 1 2 A(x) y 2 1 ) 2 (x x ) T L(x x ) = exp 1 [ ] [ ] A(x) y 2 2 L 1/2 x L 1/2 x def = exp ( 1 ) 2 Ā(x) ȳ 2, Thus we can use RTO to sample from p(x y).
15 Extension of optimization-based approach to nonlinear problems: Randomized maximum likelihood Recall that when Ā is linear, we can sample from p(x y) via: x = arg min ψ Ā(ψ) (ȳ + ɛ) 2, ɛ N (, I m+n ). Comment: For nonlinear models, this is called randomized maximum likelihood. Problem: It is an open question what the probability of x is.
16 Extension to nonlinear problems As in the linear case, we create a nonlinear mapping x = F 1 (v), v N (Q T ȳ, I n ).
17 Extension to nonlinear problems As in the linear case, we create a nonlinear mapping x = F 1 (v), v N (Q T ȳ, I n ). What are Q and F? First, define x MAP = arg min x Ā(x) ȳ 2, then first-order optimality yields J(x MAP ) T (Ā(x MAP) ȳ) =.
18 So x MAP is a solution of the nonlinear equation J(x MAP ) T Ā(x) = J(x MAP ) T ȳ.
19 So x MAP is a solution of the nonlinear equation J(x MAP ) T Ā(x) = J(x MAP ) T ȳ. QR-rewrite: this equation can be equivalently expressed Q T Ā(x) = Q T ȳ, where J(x MAP ) = QR is the thin QR factorization of J(x MAP ).
20 So x MAP is a solution of the nonlinear equation J(x MAP ) T Ā(x) = J(x MAP ) T ȳ. QR-rewrite: this equation can be equivalently expressed Q T Ā(x) = Q T ȳ, where J(x MAP ) = QR is the thin QR factorization of J(x MAP ). Nonlinear mapping: define F def = Q T Ā and ( ) x = F 1 Q T (ȳ + ɛ), ɛ N (, I m+n ) def = F 1 (v), v N (Q T ȳ, I n ).
21 RTO: use optimization to compute x = F 1 (v) Compute a sample x from the RTO proposal q(x): 1. Randomize: compute v N (Q T ȳ, I n ); 2. Optimize: solve x = arg min F(ψ) v 2 ψ 3. Reject x when v is not in the range of F.
22 RTO: use optimization to compute x = F 1 (v) Compute a sample x from the RTO proposal q(x): 1. Randomize: compute v N (Q T ȳ, I n ); 2. Optimize: solve x = arg min F(ψ) v 2 ψ 3. Reject x when v is not in the range of F. Comment: steps 1 & 2 can be equivalently expressed x = arg min ψ QT (Ā(ψ) (ȳ + ɛ)) 2, ɛ N (, I m+n ).
23 PDF for x = F 1 (v), v N (Q T ȳ, I n ) ( First, v N (Q T ȳ, I n ) implies p v (v) exp 1 2 v QT ȳ 2).
24 PDF for x = F 1 (v), v N (Q T ȳ, I n ) ( First, v N (Q T ȳ, I n ) implies p v (v) exp 1 2 v QT ȳ 2). Next we need d dx F(x) Rn n to be invertible. Then ( ) q(x) d det dx F(x) p v (F(x)) ( ) = det Q T J(x) exp ( 1 ) 2 QT (Ā(x) ȳ) 2
25 PDF for x = F 1 (v), v N (Q T ȳ, I n ) ( First, v N (Q T ȳ, I n ) implies p v (v) exp 1 2 v QT ȳ 2). Next we need d dx F(x) Rn n to be invertible. Then ( ) q(x) d det dx F(x) p v (F(x)) ( ) = det Q T J(x) exp ( 1 ) 2 QT (Ā(x) ȳ) 2 ( ) ( ) = det Q T 1 J(x) exp 2 Q T (Ā(x) ȳ) 2 exp ( 1 ) 2 Ā(x) ȳ 2 = c(x)p(x y), where the columns of Q are orthonormal and C( Q) C(Q).
26 Theorem (RTO probability density) Let Ā : Rn R m+n, ȳ R m+n, and assume Ā is continuously differentiable; J(x) R (m+n) n is rank n for every x; Q T J(x) is invertible for all relevant x. Then the random variable x = F 1 (v), v N (Q T ȳ, I n ), has probability density function q(x) c(x)p(x y), where ( ) c(x) = det(q T 1 J(x)) exp 2 Q T (ȳ Ā(x)) 2, where the columns of Q are orthonormal and C( Q) C(Q).
27 RTO Metropolis-Hastings Definitions: p(x y) x k q(x ) x posterior (target) density random variable of the Markov chain at step k RTO (independence) proposal density random variable from the proposal A chain of samples {x, x 1, } is generated by: 1. Start at x 2. For k = 1, 2, K 2.1 sample x q(x ){ from the RTO proposal } density 2.2 calculate α = min p(x y)q(x k 1 ) p(x k 1 y)q(x ) {, 1 x 2.3 x k with probability α = x k 1 with probability 1 α
28 Metropolis-Hastings using RTO Given x k 1 and proposal x q(x), accept with probability where recall that ( r = min 1, p(x y)q(x k 1 ) ) p(x k 1 y)q(x ) ( = min 1, p(x y)c(x k 1 )p(x k 1 ) y) p(x k 1 y)c(x )p(x y) ( ) = min 1, c(xk 1 ) c(x, ) ( ) c(x) = det(q T 1 J(x)) exp 2 Q T (ȳ Ā(x)) 2.
29 Metropolis-Hastings using RTO, Cont. T The RTO Metropolis-Hastings Algorithm 1. Choose x = x MAP and number of samples N. Set k = Compute an RTO sample x q(x ). 3. Compute the acceptance probability ( ) r = min 1, c(xk 1 ) c(x. ) 4. With probability r, set x k = x, else set x k = x k If k < N, set k = k + 1 and return to Step 2.
30 Understanding RTO (thanks to Zheng Wang) Consider the simple, scalar inverse problem : y = }{{} observation forward model {}}{ f(x) + ɛ }{{} noise, x N(, 1), ɛ N(, 1) p(x y) exp ( 1 ) }{{} 2 (f(x) y)2 exp ( 1 ) 2 x2 posterior ( [ ] [ ] exp x 2 ) 1 2 ( exp 1 2 f(x) }{{} Ā(x) y }{{} ȳ Ā(x) ȳ 2 )
31 density output Understanding RTO Least-squares form: p(x y) ( exp 1 [ ] [ ] x 2 ) 2 f(x) y }{{}}{{} Ā(x) ȳ p(x y) is the height of the path Ā(x) = [x, f(x)] T on the Gaussian ([ ] N, I y 2 ) posterior

32 Understanding RTO Algorithm s task: sample from the posterior
33 Understanding RTO Algorithm s task: sample from the posterior
34 Understanding RTO Algorithm s task: sample from the posterior
35 Understanding RTO Algorithm s task: sample from the posterior
36 Understanding RTO Algorithm s task: sample from the posterior
37 Understanding RTO Algorithm s task: sample from the posterior
38 Understanding RTO Algorithm s task: sample from the posterior
39 Understanding RTO Algorithm s task: sample from the posterior
40 Understanding RTO Algorithm s task: sample from the posterior
41 Understanding RTO Algorithm s task: sample from the posterior
42 density output Randomize-then-optimize Generate RTO samples {x k }: posterior
43 density output Randomize-then-optimize Generate RTO samples {x k }: 1. Compute x MAP bar
44 density output Randomize-then-optimize Generate RTO samples {x k }: 1. Compute x MAP. 2. Compute Q = J(x MAP )/ J(x MAP ). 4 2 Q bar
45 density output Randomize-then-optimize Generate RTO samples {x k }: 1. Compute x MAP. 2. Compute Q = J(x MAP )/ J(x MAP ). 3. For k = 1, 2,, K 3.1 Sample ξ N (ȳ, I 2 )
46 density output Randomize-then-optimize Generate RTO samples {x k }: 1. Compute x MAP. 2. Compute Q = J(x MAP )/ J(x MAP ). 3. For k = 1, 2,, K 3.1 Sample ξ N (ȳ, I 2 ) 3.2 Compute x k = arg min x Q T ( Ā(x) ξ ) proposal
47 density output Randomize-then-optimize Generate RTO samples {x k }: 1. Compute x MAP. 2. Compute Q = J(x MAP )/ J(x MAP ). 3. For k = 1, 2,, K 3.1 Sample ξ N (ȳ, I 2 ) 3.2 Compute x k = arg min x Q T ( Ā(x) ξ ) 2. RTO proposal density: q(x k ) Q T J(x k ) ( exp 1 ( 2 Q T Ā(x k ) ȳ ) 2) proposal
48 Uniform prior test cases Choose prior p(x) defined by x U(Ω), where U is a multivariate uniform distribution on Ω. Then p(x) = constant on Ω, and we have p(x y) exp ( 1 ) 2 A(x) y 2. Thus can use RTO to sample from p(x y).
49 BOD, Good: A(x 1, x 2 ) = x 1 (1 exp( x 2 t)) t = 2 linearly spaced observations in 1 x 9; y = A(x 1, x 2 ) + ɛ, where ɛ N (, σ 2 I) with σ =.1; [x 1, x 2 ] = [1,.1] T DRAM RTO corrected RTO θ θ θ θ1 9.2
50 BOD, Bad: A(x1, x2 ) = x1 (1 exp( x2 t)) t = 2 linearly spaced observations in 1 x 5; y = A(x1, x2 ) +, where N (, σ 2 I) with σ =.1; [x1, x2 ] = [1,.1]T DRAM RTO corrected RTO θ θ2.15 RTO DRAM θ θ
51 MONOD: A(x 1, x 2 ) = x 1 t/(x 2 + t) t = [28, 55, 83, 11, 138, 225, 375] T y = [.53,.6,.112,.15,.99,.122,.125] T θ1 θ2 12 RTO corrected RTO DRAM θ θ1
52 Autocorrelation plots for x 1 for Good and Bad BOD DRAM RTO 1.8 ACF for 1 DRAM RTO DRAM RTO lag
53 Gaussian prior test case When a Gaussian prior is chosen, ( p(x) exp 1 ) 2 (x x ) T L(x x ), the posterior can be written in least squares form: ( p(x y) exp 1 2 A(x) y 2 1 ) 2 (x x ) T L(x x ) = exp 1 [ ] [ ] A(x) y 2 2 L 1/2 x L 1/2 x def = exp ( 1 ) 2 Ā(x) ȳ 2. Thus we can use RTO to sample from p(x y).
54 Electrical Impedance Tomography Seppänen, Solonen, Haario, Kaipio (x ϕ) =, r Ω ϕ + z l x ϕ n = y l, r e l, l = 1,..., L e l x ϕ n ds = I l, l = 1,..., L x ϕ n =, r Ω\ L l=1 e l x = x( r) & ϕ = ϕ( r): electrical conductivity & potential. r Ω: spatial coordinate. e l : area under the lth electrode. z l : contact impedance between lth electrode and object. y l & I l : amplitudes of the electrode potential and current. n: outward unit normal L: number of electrodes.
 + ɛ. Evaluating f(x) requires solving a complicated PDE.")
55 EIT, Forward/Inverse Problem (image by Siltanen) Left: current I and electrode potential y; Right: conductivity x. Forward Problem: Given the conductivity x, compute y = f(x) + ɛ. Evaluating f(x) requires solving a complicated PDE. Inverse Problem: Given y, construct the posterior density p(x y).
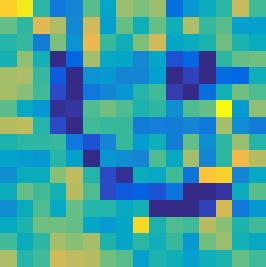
56 RTO Metropolis-Hastings applied to EIT example True Conductivity = Realization from Smoothness Prior γ (ms cm 1 ) r (cm) Upper images: truth & conditional mean. Lower images: 99% c.i. s & profiles of all of the above.
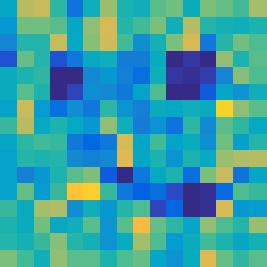
57 RTO Metropolis-Hastings applied to EIT example True Conductivity = Internal Structure # γ (ms cm 1 ) r (cm) Upper images: truth & conditional mean. Lower images: 99% c.i. s & profiles of all of the above.
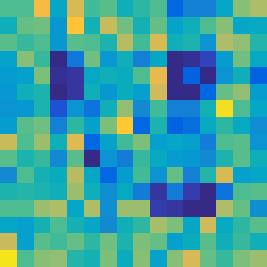
.8.6.4.2 8 6 4 2 2 4 6 8 r (cm) Upper images: truth & conditional mean. Lower images: 99% c.i. s & profiles of all of the above.")
58 RTO Metropolis-Hastings applied to EIT example True Conductivity = Internal Structure # γ (ms cm 1 ) r (cm) Upper images: truth & conditional mean. Lower images: 99% c.i. s & profiles of all of the above.
59 Laplace (Total Variation and Besov) Priors Finally, we consider the l 1 prior case: p(x) exp ( δ Dx 1 ), where D is an invertible matrix. Then the posterior then takes the form p(x y) exp ( 1 ) 2 A(x) y 2 δ Dx 1. Note that total variation in one-dimension and the Besov B1,1 s -space priors in one- and higher-dimensions have this form.
60 Laplace (Total Variation and Besov) Priors Finally, we consider the l 1 prior case: p(x) exp ( δ Dx 1 ), where D is an invertible matrix. Then the posterior then takes the form p(x y) exp ( 1 ) 2 A(x) y 2 δ Dx 1. Note that total variation in one-dimension and the Besov B1,1 s -space priors in one- and higher-dimensions have this form. But p(x y) does not have least squares form.
61 Prior Transformation for l 1 Priors Main idea: Transform the problem to one that RTO can solve Define a map between a reference parameter u and the physical parameter x. Choose the mapping so that the prior on u is Gaussian. Sample from the transformed posterior, in u, using RTO, then transform the samples back. S:u x u x
62 Prior Transformation for l 1 Priors Main idea: Transform the problem to one that RTO can solve Define a map between a reference parameter u and the physical parameter x. Choose the mapping so that the prior on u is Gaussian. Sample from the transformed posterior, in u, using RTO, then transform the samples back. S:u x u x
63 The One-Dimensional Transformation The prior transformation is analytic and is defined where x = S(u) def = F 1 p(x) (ϕ(u)), F 1 p(x) is the inverse-cdf of the L1 -type prior p(x); ϕ is the CDF of a standard Gaussian.
64 The One-Dimensional Transformation The prior transformation is analytic and is defined where x = S(u) def = F 1 p(x) (ϕ(u)), F 1 p(x) is the inverse-cdf of the L1 -type prior p(x); ϕ is the CDF of a standard Gaussian. Then the posterior density p(x y) can be expressed in terms of r: p(s(u) y) exp ( 1 2 (f (S(u)) y)2 1 ) 2 u2 = exp 1 [ ] [ ] f (S(u)) y 2 2 u
65 3 Prior Transformation: 1D Laplace Prior Transformation 3 = g(u) 4 p(x) exp ( λ x ) p(u) exp ( 1 2 u2) u For multiple independent x i, transformation is repeated
66 posterior likelihood prior 2D Laplace Prior linear model Gaussian prior linear model L1-type prior Transformed 3 3 r Transformation moves complexity from prior to likelihood
67 Laplace Priors in Higher-Dimensions 1. Define a change of variables Dx = S(u) such that the transformed prior is a standard Gaussian, i.e., ( p(d 1 S(u)) exp δ ) 2 u 2 2.
68 Laplace Priors in Higher-Dimensions 1. Define a change of variables Dx = S(u) such that the transformed prior is a standard Gaussian, i.e., ( p(d 1 S(u)) exp δ ) 2 u Sample from the transformed posterior, with respect to u, p(d 1 S(u) y) p(y D 1 S(u))p(D 1 S(u));
69 Laplace Priors in Higher-Dimensions 1. Define a change of variables Dx = S(u) such that the transformed prior is a standard Gaussian, i.e., ( p(d 1 S(u)) exp δ ) 2 u Sample from the transformed posterior, with respect to u, p(d 1 S(u) y) p(y D 1 S(u))p(D 1 S(u)); 3. Transform the samples back via x = D 1 S(u).
70 Test Case 3, L 1 -type priors: High-Dimensional Problems The transformed posterior, with D an invertible matrix, takes the form p(d 1 S(u) y) exp ( 1 ( ) 2 (f D 1 S(u) y) 2 1 ) 2 u2 = exp 1 [ ( A D 1 S(u) ) ] [ ] y 2, 2 u where as defined above. S(u) = (S(u 1 ),..., S(u n ))
71 Test Case 3, L 1 -type priors: High-Dimensional Problems The transformed posterior, with D an invertible matrix, takes the form p(d 1 S(u) y) exp ( 1 ( ) 2 (f D 1 S(u) y) 2 1 ) 2 u2 = exp 1 [ ( A D 1 S(u) ) ] [ ] y 2, 2 u where as defined above. S(u) = (S(u 1 ),..., S(u n )) p(d 1 S(u) y) is in least squares form with respect to u so we can apply RTO!
72 RTO Metropolis-Hastings to Sample from p(d 1 S(u) y) T The RTO Metropolis-Hastings Algorithm 1. Choose u = u MAP = arg min u p(d 1 S(u) y) and number of samples N. Set k = Compute an RTO sample u q(u ). 3. Compute the acceptance probability ( ) r = min 1, c(uk 1 ) c(u. ) 4. With probability r, set u k = u, else set u k = u k If k < N, set k = k + 1 and return to Step 2.
73 True signal Measurements Deconvolution of a Square Pulse w/ TV Prior x x R 63 y R 32 p(x y) exp ( λ ) 2 Ax y 2 δ Dx 1

74 MCMC chain MCMC chain Deconvolution of a Square Pulse w/ TV Prior Evaluations # Evaluations #1 6
) y(t)) = h(t), t [, 1] 2, with")


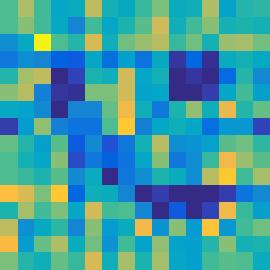
75 2D elliptic PDE inverse problem (exp(x(t)) y(t)) = h(t), t [, 1] 2, with boundary conditions exp(x(t)) y(t) n(t) =. After discretization, this defines the model y = A(x) x2 4 x2-5 x x1 x1 x1 x true h y
 y) exp ( λ ) 2 A(D 1 S(u)) y 22 δ u 2, where D is a")

76 2D PDE inverse problem: mean and STD Use RTO-MH to sample from the transformed posterior: p(d 1 S(u) y) exp ( λ ) 2 A(D 1 S(u)) y 22 δ u 2, where D is a wavelet transform matrix, then transform the samples back via x = D 1 S(u). Conditional Mean Standard Deviation x2 4 x x x 1



77 2D PDE inverse problem: Samples
78 Conclusions/Takeaways The development of computationally efficient MCMC methods for nonlinear inverse problems is challenging. RTO was presented as a proposal mechanism within Metropolis-Hastings. RTO was described in some detail and then test on several examples, including EIT and l 1 priors such as total variation.
Randomize-Then-Optimize for Sampling and Uncertainty Quantification in Electrical Impedance Tomography
 SIAM/ASA J. UNCERTAINTY QUANTIFICATION Vol. 3, pp. 1136 1158 c 2015 Society for Industrial and Applied Mathematics and American Statistical Association Randomize-Then-Optimize for Sampling and Uncertainty
SIAM/ASA J. UNCERTAINTY QUANTIFICATION Vol. 3, pp. 1136 1158 c 2015 Society for Industrial and Applied Mathematics and American Statistical Association Randomize-Then-Optimize for Sampling and Uncertainty
Bayesian Inverse Problems with L[subscript 1] Priors: A Randomize-Then-Optimize Approach
![Bayesian Inverse Problems with L[subscript 1] Priors: A Randomize-Then-Optimize Approach](/thumbs/95/125588245.jpg "Bayesian Inverse Problems with L[subscript 1] Priors: A Randomize-Then-Optimize Approach") Bayesian Inverse Problems with L[subscript ] Priors: A Randomize-Then-Optimize Approach The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters.
Bayesian Inverse Problems with L[subscript ] Priors: A Randomize-Then-Optimize Approach The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters.
MCMC Sampling for Bayesian Inference using L1-type Priors
 MÜNSTER MCMC Sampling for Bayesian Inference using L1-type Priors (what I do whenever the ill-posedness of EEG/MEG is just not frustrating enough!) AG Imaging Seminar Felix Lucka 26.06.2012 , MÜNSTER Sampling
MÜNSTER MCMC Sampling for Bayesian Inference using L1-type Priors (what I do whenever the ill-posedness of EEG/MEG is just not frustrating enough!) AG Imaging Seminar Felix Lucka 26.06.2012 , MÜNSTER Sampling
Answers and expectations
 Answers and expectations For a function f(x) and distribution P(x), the expectation of f with respect to P is The expectation is the average of f, when x is drawn from the probability distribution P E
Answers and expectations For a function f(x) and distribution P(x), the expectation of f with respect to P is The expectation is the average of f, when x is drawn from the probability distribution P E
Randomize-Then-Optimize: A Method for Sampling from Posterior Distributions in Nonlinear Inverse Problems
 Randomize-Then-Optimize: A Method for Sampling from Posterior Distributions in Nonlinear Inverse Problems The MIT Faculty has made this article openly available. Please share how this access benefits you.
Randomize-Then-Optimize: A Method for Sampling from Posterior Distributions in Nonlinear Inverse Problems The MIT Faculty has made this article openly available. Please share how this access benefits you.
Introduction to Bayesian methods in inverse problems
 Introduction to Bayesian methods in inverse problems Ville Kolehmainen 1 1 Department of Applied Physics, University of Eastern Finland, Kuopio, Finland March 4 2013 Manchester, UK. Contents Introduction
Introduction to Bayesian methods in inverse problems Ville Kolehmainen 1 1 Department of Applied Physics, University of Eastern Finland, Kuopio, Finland March 4 2013 Manchester, UK. Contents Introduction
Bayesian Inference and MCMC
 Bayesian Inference and MCMC Aryan Arbabi Partly based on MCMC slides from CSC412 Fall 2018 1 / 18 Bayesian Inference - Motivation Consider we have a data set D = {x 1,..., x n }. E.g each x i can be the
Bayesian Inference and MCMC Aryan Arbabi Partly based on MCMC slides from CSC412 Fall 2018 1 / 18 Bayesian Inference - Motivation Consider we have a data set D = {x 1,..., x n }. E.g each x i can be the
ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering
 ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal:
ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal:
16 : Markov Chain Monte Carlo (MCMC)
") 10-708: Probabilistic Graphical Models 10-708, Spring 2014 16 : Markov Chain Monte Carlo MCMC Lecturer: Matthew Gormley Scribes: Yining Wang, Renato Negrinho 1 Sampling from low-dimensional distributions
10-708: Probabilistic Graphical Models 10-708, Spring 2014 16 : Markov Chain Monte Carlo MCMC Lecturer: Matthew Gormley Scribes: Yining Wang, Renato Negrinho 1 Sampling from low-dimensional distributions
Deblurring Jupiter (sampling in GLIP faster than regularized inversion) Colin Fox Richard A. Norton, J.
 Colin Fox Richard A. Norton, J.") Deblurring Jupiter (sampling in GLIP faster than regularized inversion) Colin Fox fox@physics.otago.ac.nz Richard A. Norton, J. Andrés Christen Topics... Backstory (?) Sampling in linear-gaussian hierarchical
Deblurring Jupiter (sampling in GLIP faster than regularized inversion) Colin Fox fox@physics.otago.ac.nz Richard A. Norton, J. Andrés Christen Topics... Backstory (?) Sampling in linear-gaussian hierarchical
Lecture 8: Bayesian Estimation of Parameters in State Space Models
 in State Space Models March 30, 2016 Contents 1 Bayesian estimation of parameters in state space models 2 Computational methods for parameter estimation 3 Practical parameter estimation in state space
in State Space Models March 30, 2016 Contents 1 Bayesian estimation of parameters in state space models 2 Computational methods for parameter estimation 3 Practical parameter estimation in state space
Discretization-invariant Bayesian inversion and Besov space priors. Samuli Siltanen RICAM Tampere University of Technology
 Discretization-invariant Bayesian inversion and Besov space priors Samuli Siltanen RICAM 28.10.2008 Tampere University of Technology http://math.tkk.fi/inverse-coe/ This is a joint work with Matti Lassas
Discretization-invariant Bayesian inversion and Besov space priors Samuli Siltanen RICAM 28.10.2008 Tampere University of Technology http://math.tkk.fi/inverse-coe/ This is a joint work with Matti Lassas
Markov chain Monte Carlo methods in atmospheric remote sensing
 1 / 45 Markov chain Monte Carlo methods in atmospheric remote sensing Johanna Tamminen johanna.tamminen@fmi.fi ESA Summer School on Earth System Monitoring and Modeling July 3 Aug 11, 212, Frascati July,
1 / 45 Markov chain Monte Carlo methods in atmospheric remote sensing Johanna Tamminen johanna.tamminen@fmi.fi ESA Summer School on Earth System Monitoring and Modeling July 3 Aug 11, 212, Frascati July,
Metropolis Hastings. Rebecca C. Steorts Bayesian Methods and Modern Statistics: STA 360/601. Module 9
 Metropolis Hastings Rebecca C. Steorts Bayesian Methods and Modern Statistics: STA 360/601 Module 9 1 The Metropolis-Hastings algorithm is a general term for a family of Markov chain simulation methods
Metropolis Hastings Rebecca C. Steorts Bayesian Methods and Modern Statistics: STA 360/601 Module 9 1 The Metropolis-Hastings algorithm is a general term for a family of Markov chain simulation methods
17 : Markov Chain Monte Carlo
 10-708: Probabilistic Graphical Models, Spring 2015 17 : Markov Chain Monte Carlo Lecturer: Eric P. Xing Scribes: Heran Lin, Bin Deng, Yun Huang 1 Review of Monte Carlo Methods 1.1 Overview Monte Carlo
10-708: Probabilistic Graphical Models, Spring 2015 17 : Markov Chain Monte Carlo Lecturer: Eric P. Xing Scribes: Heran Lin, Bin Deng, Yun Huang 1 Review of Monte Carlo Methods 1.1 Overview Monte Carlo
Reminder of some Markov Chain properties:
 Reminder of some Markov Chain properties: 1. a transition from one state to another occurs probabilistically 2. only state that matters is where you currently are (i.e. given present, future is independent
Reminder of some Markov Chain properties: 1. a transition from one state to another occurs probabilistically 2. only state that matters is where you currently are (i.e. given present, future is independent
Robust MCMC Sampling with Non-Gaussian and Hierarchical Priors
 Division of Engineering & Applied Science Robust MCMC Sampling with Non-Gaussian and Hierarchical Priors IPAM, UCLA, November 14, 2017 Matt Dunlop Victor Chen (Caltech) Omiros Papaspiliopoulos (ICREA,
Division of Engineering & Applied Science Robust MCMC Sampling with Non-Gaussian and Hierarchical Priors IPAM, UCLA, November 14, 2017 Matt Dunlop Victor Chen (Caltech) Omiros Papaspiliopoulos (ICREA,
Point spread function reconstruction from the image of a sharp edge
 DOE/NV/5946--49 Point spread function reconstruction from the image of a sharp edge John Bardsley, Kevin Joyce, Aaron Luttman The University of Montana National Security Technologies LLC Montana Uncertainty
DOE/NV/5946--49 Point spread function reconstruction from the image of a sharp edge John Bardsley, Kevin Joyce, Aaron Luttman The University of Montana National Security Technologies LLC Montana Uncertainty
Advanced Statistical Modelling
 Markov chain Monte Carlo (MCMC) Methods and Their Applications in Bayesian Statistics School of Technology and Business Studies/Statistics Dalarna University Borlänge, Sweden. Feb. 05, 2014. Outlines 1
Markov chain Monte Carlo (MCMC) Methods and Their Applications in Bayesian Statistics School of Technology and Business Studies/Statistics Dalarna University Borlänge, Sweden. Feb. 05, 2014. Outlines 1
Computer Practical: Metropolis-Hastings-based MCMC
 Computer Practical: Metropolis-Hastings-based MCMC Andrea Arnold and Franz Hamilton North Carolina State University July 30, 2016 A. Arnold / F. Hamilton (NCSU) MH-based MCMC July 30, 2016 1 / 19 Markov
Computer Practical: Metropolis-Hastings-based MCMC Andrea Arnold and Franz Hamilton North Carolina State University July 30, 2016 A. Arnold / F. Hamilton (NCSU) MH-based MCMC July 30, 2016 1 / 19 Markov
Lecture 8: The Metropolis-Hastings Algorithm
 30.10.2008 What we have seen last time: Gibbs sampler Key idea: Generate a Markov chain by updating the component of (X 1,..., X p ) in turn by drawing from the full conditionals: X (t) j Two drawbacks:
30.10.2008 What we have seen last time: Gibbs sampler Key idea: Generate a Markov chain by updating the component of (X 1,..., X p ) in turn by drawing from the full conditionals: X (t) j Two drawbacks:
SAMPLING ALGORITHMS. In general. Inference in Bayesian models
 SAMPLING ALGORITHMS SAMPLING ALGORITHMS In general A sampling algorithm is an algorithm that outputs samples x 1, x 2,... from a given distribution P or density p. Sampling algorithms can for example be
SAMPLING ALGORITHMS SAMPLING ALGORITHMS In general A sampling algorithm is an algorithm that outputs samples x 1, x 2,... from a given distribution P or density p. Sampling algorithms can for example be
Inverse Problems in the Bayesian Framework
 Inverse Problems in the Bayesian Framework Daniela Calvetti Case Western Reserve University Cleveland, Ohio Raleigh, NC, July 2016 Bayes Formula Stochastic model: Two random variables X R n, B R m, where
Inverse Problems in the Bayesian Framework Daniela Calvetti Case Western Reserve University Cleveland, Ohio Raleigh, NC, July 2016 Bayes Formula Stochastic model: Two random variables X R n, B R m, where
Recent Advances in Bayesian Inference for Inverse Problems
 Recent Advances in Bayesian Inference for Inverse Problems Felix Lucka University College London, UK f.lucka@ucl.ac.uk Applied Inverse Problems Helsinki, May 25, 2015 Bayesian Inference for Inverse Problems
Recent Advances in Bayesian Inference for Inverse Problems Felix Lucka University College London, UK f.lucka@ucl.ac.uk Applied Inverse Problems Helsinki, May 25, 2015 Bayesian Inference for Inverse Problems
I. Bayesian econometrics
 I. Bayesian econometrics A. Introduction B. Bayesian inference in the univariate regression model C. Statistical decision theory D. Large sample results E. Diffuse priors F. Numerical Bayesian methods
I. Bayesian econometrics A. Introduction B. Bayesian inference in the univariate regression model C. Statistical decision theory D. Large sample results E. Diffuse priors F. Numerical Bayesian methods
Bayesian Regression Linear and Logistic Regression
 When we want more than point estimates Bayesian Regression Linear and Logistic Regression Nicole Beckage Ordinary Least Squares Regression and Lasso Regression return only point estimates But what if we
When we want more than point estimates Bayesian Regression Linear and Logistic Regression Nicole Beckage Ordinary Least Squares Regression and Lasso Regression return only point estimates But what if we
Probabilistic Graphical Models Lecture 17: Markov chain Monte Carlo
 Probabilistic Graphical Models Lecture 17: Markov chain Monte Carlo Andrew Gordon Wilson www.cs.cmu.edu/~andrewgw Carnegie Mellon University March 18, 2015 1 / 45 Resources and Attribution Image credits,
Probabilistic Graphical Models Lecture 17: Markov chain Monte Carlo Andrew Gordon Wilson www.cs.cmu.edu/~andrewgw Carnegie Mellon University March 18, 2015 1 / 45 Resources and Attribution Image credits,
CS281A/Stat241A Lecture 22
 CS281A/Stat241A Lecture 22 p. 1/4 CS281A/Stat241A Lecture 22 Monte Carlo Methods Peter Bartlett CS281A/Stat241A Lecture 22 p. 2/4 Key ideas of this lecture Sampling in Bayesian methods: Predictive distribution
CS281A/Stat241A Lecture 22 p. 1/4 CS281A/Stat241A Lecture 22 Monte Carlo Methods Peter Bartlett CS281A/Stat241A Lecture 22 p. 2/4 Key ideas of this lecture Sampling in Bayesian methods: Predictive distribution
Markov Chain Monte Carlo (MCMC)
") Markov Chain Monte Carlo (MCMC Dependent Sampling Suppose we wish to sample from a density π, and we can evaluate π as a function but have no means to directly generate a sample. Rejection sampling can
Markov Chain Monte Carlo (MCMC Dependent Sampling Suppose we wish to sample from a density π, and we can evaluate π as a function but have no means to directly generate a sample. Rejection sampling can
Stat 451 Lecture Notes Markov Chain Monte Carlo. Ryan Martin UIC
 Stat 451 Lecture Notes 07 12 Markov Chain Monte Carlo Ryan Martin UIC www.math.uic.edu/~rgmartin 1 Based on Chapters 8 9 in Givens & Hoeting, Chapters 25 27 in Lange 2 Updated: April 4, 2016 1 / 42 Outline
Stat 451 Lecture Notes 07 12 Markov Chain Monte Carlo Ryan Martin UIC www.math.uic.edu/~rgmartin 1 Based on Chapters 8 9 in Givens & Hoeting, Chapters 25 27 in Lange 2 Updated: April 4, 2016 1 / 42 Outline
Lecture 7 and 8: Markov Chain Monte Carlo
 Lecture 7 and 8: Markov Chain Monte Carlo 4F13: Machine Learning Zoubin Ghahramani and Carl Edward Rasmussen Department of Engineering University of Cambridge http://mlg.eng.cam.ac.uk/teaching/4f13/ Ghahramani
Lecture 7 and 8: Markov Chain Monte Carlo 4F13: Machine Learning Zoubin Ghahramani and Carl Edward Rasmussen Department of Engineering University of Cambridge http://mlg.eng.cam.ac.uk/teaching/4f13/ Ghahramani
Lecture 4: Dynamic models
 linear s Lecture 4: s Hedibert Freitas Lopes The University of Chicago Booth School of Business 5807 South Woodlawn Avenue, Chicago, IL 60637 http://faculty.chicagobooth.edu/hedibert.lopes hlopes@chicagobooth.edu
linear s Lecture 4: s Hedibert Freitas Lopes The University of Chicago Booth School of Business 5807 South Woodlawn Avenue, Chicago, IL 60637 http://faculty.chicagobooth.edu/hedibert.lopes hlopes@chicagobooth.edu
April 20th, Advanced Topics in Machine Learning California Institute of Technology. Markov Chain Monte Carlo for Machine Learning
 for for Advanced Topics in California Institute of Technology April 20th, 2017 1 / 50 Table of Contents for 1 2 3 4 2 / 50 History of methods for Enrico Fermi used to calculate incredibly accurate predictions
for for Advanced Topics in California Institute of Technology April 20th, 2017 1 / 50 Table of Contents for 1 2 3 4 2 / 50 History of methods for Enrico Fermi used to calculate incredibly accurate predictions
Sampling from complex probability distributions
 Sampling from complex probability distributions Louis J. M. Aslett (louis.aslett@durham.ac.uk) Department of Mathematical Sciences Durham University UTOPIAE Training School II 4 July 2017 1/37 Motivation
Sampling from complex probability distributions Louis J. M. Aslett (louis.aslett@durham.ac.uk) Department of Mathematical Sciences Durham University UTOPIAE Training School II 4 July 2017 1/37 Motivation
Bayesian Inference for DSGE Models. Lawrence J. Christiano
 Bayesian Inference for DSGE Models Lawrence J. Christiano Outline State space-observer form. convenient for model estimation and many other things. Bayesian inference Bayes rule. Monte Carlo integation.
Bayesian Inference for DSGE Models Lawrence J. Christiano Outline State space-observer form. convenient for model estimation and many other things. Bayesian inference Bayes rule. Monte Carlo integation.
Introduction to MCMC. DB Breakfast 09/30/2011 Guozhang Wang
 Introduction to MCMC DB Breakfast 09/30/2011 Guozhang Wang Motivation: Statistical Inference Joint Distribution Sleeps Well Playground Sunny Bike Ride Pleasant dinner Productive day Posterior Estimation
Introduction to MCMC DB Breakfast 09/30/2011 Guozhang Wang Motivation: Statistical Inference Joint Distribution Sleeps Well Playground Sunny Bike Ride Pleasant dinner Productive day Posterior Estimation
Graphical Models and Kernel Methods
 Graphical Models and Kernel Methods Jerry Zhu Department of Computer Sciences University of Wisconsin Madison, USA MLSS June 17, 2014 1 / 123 Outline Graphical Models Probabilistic Inference Directed vs.
Graphical Models and Kernel Methods Jerry Zhu Department of Computer Sciences University of Wisconsin Madison, USA MLSS June 17, 2014 1 / 123 Outline Graphical Models Probabilistic Inference Directed vs.
Spatial Statistics with Image Analysis. Outline. A Statistical Approach. Johan Lindström 1. Lund October 6, 2016
 Spatial Statistics Spatial Examples More Spatial Statistics with Image Analysis Johan Lindström 1 1 Mathematical Statistics Centre for Mathematical Sciences Lund University Lund October 6, 2016 Johan Lindström
Spatial Statistics Spatial Examples More Spatial Statistics with Image Analysis Johan Lindström 1 1 Mathematical Statistics Centre for Mathematical Sciences Lund University Lund October 6, 2016 Johan Lindström
Learning the hyper-parameters. Luca Martino
 Learning the hyper-parameters Luca Martino 2017 2017 1 / 28 Parameters and hyper-parameters 1. All the described methods depend on some choice of hyper-parameters... 2. For instance, do you recall λ (bandwidth
Learning the hyper-parameters Luca Martino 2017 2017 1 / 28 Parameters and hyper-parameters 1. All the described methods depend on some choice of hyper-parameters... 2. For instance, do you recall λ (bandwidth
F denotes cumulative density. denotes probability density function; (.)
") BAYESIAN ANALYSIS: FOREWORDS Notation. System means the real thing and a model is an assumed mathematical form for the system.. he probability model class M contains the set of the all admissible models
BAYESIAN ANALYSIS: FOREWORDS Notation. System means the real thing and a model is an assumed mathematical form for the system.. he probability model class M contains the set of the all admissible models
Well-posed Bayesian Inverse Problems: Beyond Gaussian Priors
 Well-posed Bayesian Inverse Problems: Beyond Gaussian Priors Bamdad Hosseini Department of Mathematics Simon Fraser University, Canada The Institute for Computational Engineering and Sciences University
Well-posed Bayesian Inverse Problems: Beyond Gaussian Priors Bamdad Hosseini Department of Mathematics Simon Fraser University, Canada The Institute for Computational Engineering and Sciences University
Exercises Tutorial at ICASSP 2016 Learning Nonlinear Dynamical Models Using Particle Filters
 Exercises Tutorial at ICASSP 216 Learning Nonlinear Dynamical Models Using Particle Filters Andreas Svensson, Johan Dahlin and Thomas B. Schön March 18, 216 Good luck! 1 [Bootstrap particle filter for
Exercises Tutorial at ICASSP 216 Learning Nonlinear Dynamical Models Using Particle Filters Andreas Svensson, Johan Dahlin and Thomas B. Schön March 18, 216 Good luck! 1 [Bootstrap particle filter for
Winter 2019 Math 106 Topics in Applied Mathematics. Lecture 9: Markov Chain Monte Carlo
 Winter 2019 Math 106 Topics in Applied Mathematics Data-driven Uncertainty Quantification Yoonsang Lee (yoonsang.lee@dartmouth.edu) Lecture 9: Markov Chain Monte Carlo 9.1 Markov Chain A Markov Chain Monte
Winter 2019 Math 106 Topics in Applied Mathematics Data-driven Uncertainty Quantification Yoonsang Lee (yoonsang.lee@dartmouth.edu) Lecture 9: Markov Chain Monte Carlo 9.1 Markov Chain A Markov Chain Monte
Computer intensive statistical methods
 Lecture 13 MCMC, Hybrid chains October 13, 2015 Jonas Wallin jonwal@chalmers.se Chalmers, Gothenburg university MH algorithm, Chap:6.3 The metropolis hastings requires three objects, the distribution of
Lecture 13 MCMC, Hybrid chains October 13, 2015 Jonas Wallin jonwal@chalmers.se Chalmers, Gothenburg university MH algorithm, Chap:6.3 The metropolis hastings requires three objects, the distribution of
Density Estimation. Seungjin Choi
 Density Estimation Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr http://mlg.postech.ac.kr/
Density Estimation Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr http://mlg.postech.ac.kr/
Bayesian parameter estimation in predictive engineering
 Bayesian parameter estimation in predictive engineering Damon McDougall Institute for Computational Engineering and Sciences, UT Austin 14th August 2014 1/27 Motivation Understand physical phenomena Observations
Bayesian parameter estimation in predictive engineering Damon McDougall Institute for Computational Engineering and Sciences, UT Austin 14th August 2014 1/27 Motivation Understand physical phenomena Observations
Bayesian Inverse Problems
 Bayesian Inverse Problems Jonas Latz Input/Output: www.latz.io Technical University of Munich Department of Mathematics, Chair for Numerical Analysis Email: jonas.latz@tum.de Garching, July 10 2018 Guest
Bayesian Inverse Problems Jonas Latz Input/Output: www.latz.io Technical University of Munich Department of Mathematics, Chair for Numerical Analysis Email: jonas.latz@tum.de Garching, July 10 2018 Guest
Inverse problems and uncertainty quantification in remote sensing
 1 / 38 Inverse problems and uncertainty quantification in remote sensing Johanna Tamminen Finnish Meterological Institute johanna.tamminen@fmi.fi ESA Earth Observation Summer School on Earth System Monitoring
1 / 38 Inverse problems and uncertainty quantification in remote sensing Johanna Tamminen Finnish Meterological Institute johanna.tamminen@fmi.fi ESA Earth Observation Summer School on Earth System Monitoring
Bayesian Inference for DSGE Models. Lawrence J. Christiano
 Bayesian Inference for DSGE Models Lawrence J. Christiano Outline State space-observer form. convenient for model estimation and many other things. Preliminaries. Probabilities. Maximum Likelihood. Bayesian
Bayesian Inference for DSGE Models Lawrence J. Christiano Outline State space-observer form. convenient for model estimation and many other things. Preliminaries. Probabilities. Maximum Likelihood. Bayesian
CPSC 540: Machine Learning
 CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
Generalized Rejection Sampling Schemes and Applications in Signal Processing
 Generalized Rejection Sampling Schemes and Applications in Signal Processing 1 arxiv:0904.1300v1 [stat.co] 8 Apr 2009 Luca Martino and Joaquín Míguez Department of Signal Theory and Communications, Universidad
Generalized Rejection Sampling Schemes and Applications in Signal Processing 1 arxiv:0904.1300v1 [stat.co] 8 Apr 2009 Luca Martino and Joaquín Míguez Department of Signal Theory and Communications, Universidad
Parameter Estimation. William H. Jefferys University of Texas at Austin Parameter Estimation 7/26/05 1
 Parameter Estimation William H. Jefferys University of Texas at Austin bill@bayesrules.net Parameter Estimation 7/26/05 1 Elements of Inference Inference problems contain two indispensable elements: Data
Parameter Estimation William H. Jefferys University of Texas at Austin bill@bayesrules.net Parameter Estimation 7/26/05 1 Elements of Inference Inference problems contain two indispensable elements: Data
Markov Chain Monte Carlo (MCMC)
") School of Computer Science 10-708 Probabilistic Graphical Models Markov Chain Monte Carlo (MCMC) Readings: MacKay Ch. 29 Jordan Ch. 21 Matt Gormley Lecture 16 March 14, 2016 1 Homework 2 Housekeeping Due
School of Computer Science 10-708 Probabilistic Graphical Models Markov Chain Monte Carlo (MCMC) Readings: MacKay Ch. 29 Jordan Ch. 21 Matt Gormley Lecture 16 March 14, 2016 1 Homework 2 Housekeeping Due
Robert Collins CSE586, PSU Intro to Sampling Methods
 Robert Collins Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Robert Collins A Brief Overview of Sampling Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling
Robert Collins Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Robert Collins A Brief Overview of Sampling Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling
Markov Chain Monte Carlo
 Markov Chain Monte Carlo Recall: To compute the expectation E ( h(y ) ) we use the approximation E(h(Y )) 1 n n h(y ) t=1 with Y (1),..., Y (n) h(y). Thus our aim is to sample Y (1),..., Y (n) from f(y).
Markov Chain Monte Carlo Recall: To compute the expectation E ( h(y ) ) we use the approximation E(h(Y )) 1 n n h(y ) t=1 with Y (1),..., Y (n) h(y). Thus our aim is to sample Y (1),..., Y (n) from f(y).
Markov Chains and MCMC
 Markov Chains and MCMC CompSci 590.02 Instructor: AshwinMachanavajjhala Lecture 4 : 590.02 Spring 13 1 Recap: Monte Carlo Method If U is a universe of items, and G is a subset satisfying some property,
Markov Chains and MCMC CompSci 590.02 Instructor: AshwinMachanavajjhala Lecture 4 : 590.02 Spring 13 1 Recap: Monte Carlo Method If U is a universe of items, and G is a subset satisfying some property,
Probabilistic Graphical Models
 2016 Robert Nowak Probabilistic Graphical Models 1 Introduction We have focused mainly on linear models for signals, in particular the subspace model x = Uθ, where U is a n k matrix and θ R k is a vector
2016 Robert Nowak Probabilistic Graphical Models 1 Introduction We have focused mainly on linear models for signals, in particular the subspace model x = Uθ, where U is a n k matrix and θ R k is a vector
Adaptive Posterior Approximation within MCMC
 Adaptive Posterior Approximation within MCMC Tiangang Cui (MIT) Colin Fox (University of Otago) Mike O Sullivan (University of Auckland) Youssef Marzouk (MIT) Karen Willcox (MIT) 06/January/2012 C, F,
Adaptive Posterior Approximation within MCMC Tiangang Cui (MIT) Colin Fox (University of Otago) Mike O Sullivan (University of Auckland) Youssef Marzouk (MIT) Karen Willcox (MIT) 06/January/2012 C, F,
Nonlinear Model Reduction for Uncertainty Quantification in Large-Scale Inverse Problems
 Nonlinear Model Reduction for Uncertainty Quantification in Large-Scale Inverse Problems Krzysztof Fidkowski, David Galbally*, Karen Willcox* (*MIT) Computational Aerospace Sciences Seminar Aerospace Engineering
Nonlinear Model Reduction for Uncertainty Quantification in Large-Scale Inverse Problems Krzysztof Fidkowski, David Galbally*, Karen Willcox* (*MIT) Computational Aerospace Sciences Seminar Aerospace Engineering
Robert Collins CSE586, PSU Intro to Sampling Methods
 Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Topics to be Covered Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling (CDF) Ancestral Sampling Rejection
Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Topics to be Covered Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling (CDF) Ancestral Sampling Rejection
MCMC and Gibbs Sampling. Kayhan Batmanghelich
 MCMC and Gibbs Sampling Kayhan Batmanghelich 1 Approaches to inference l Exact inference algorithms l l l The elimination algorithm Message-passing algorithm (sum-product, belief propagation) The junction
MCMC and Gibbs Sampling Kayhan Batmanghelich 1 Approaches to inference l Exact inference algorithms l l l The elimination algorithm Message-passing algorithm (sum-product, belief propagation) The junction
Forward Problems and their Inverse Solutions
 Forward Problems and their Inverse Solutions Sarah Zedler 1,2 1 King Abdullah University of Science and Technology 2 University of Texas at Austin February, 2013 Outline 1 Forward Problem Example Weather
Forward Problems and their Inverse Solutions Sarah Zedler 1,2 1 King Abdullah University of Science and Technology 2 University of Texas at Austin February, 2013 Outline 1 Forward Problem Example Weather
Markov Chain Monte Carlo, Numerical Integration
 Markov Chain Monte Carlo, Numerical Integration (See Statistics) Trevor Gallen Fall 2015 1 / 1 Agenda Numerical Integration: MCMC methods Estimating Markov Chains Estimating latent variables 2 / 1 Numerical
Markov Chain Monte Carlo, Numerical Integration (See Statistics) Trevor Gallen Fall 2015 1 / 1 Agenda Numerical Integration: MCMC methods Estimating Markov Chains Estimating latent variables 2 / 1 Numerical
MARKOV CHAIN MONTE CARLO
 MARKOV CHAIN MONTE CARLO RYAN WANG Abstract. This paper gives a brief introduction to Markov Chain Monte Carlo methods, which offer a general framework for calculating difficult integrals. We start with
MARKOV CHAIN MONTE CARLO RYAN WANG Abstract. This paper gives a brief introduction to Markov Chain Monte Carlo methods, which offer a general framework for calculating difficult integrals. We start with
AEROSOL MODEL SELECTION AND UNCERTAINTY MODELLING BY RJMCMC TECHNIQUE
 AEROSOL MODEL SELECTION AND UNCERTAINTY MODELLING BY RJMCMC TECHNIQUE Marko Laine 1, Johanna Tamminen 1, Erkki Kyrölä 1, and Heikki Haario 2 1 Finnish Meteorological Institute, Helsinki, Finland 2 Lappeenranta
AEROSOL MODEL SELECTION AND UNCERTAINTY MODELLING BY RJMCMC TECHNIQUE Marko Laine 1, Johanna Tamminen 1, Erkki Kyrölä 1, and Heikki Haario 2 1 Finnish Meteorological Institute, Helsinki, Finland 2 Lappeenranta
Previously Monte Carlo Integration
 Previously Simulation, sampling Monte Carlo Simulations Inverse cdf method Rejection sampling Today: sampling cont., Bayesian inference via sampling Eigenvalues and Eigenvectors Markov processes, PageRank
Previously Simulation, sampling Monte Carlo Simulations Inverse cdf method Rejection sampling Today: sampling cont., Bayesian inference via sampling Eigenvalues and Eigenvectors Markov processes, PageRank
Monte Carlo Methods. Leon Gu CSD, CMU
 Monte Carlo Methods Leon Gu CSD, CMU Approximate Inference EM: y-observed variables; x-hidden variables; θ-parameters; E-step: q(x) = p(x y, θ t 1 ) M-step: θ t = arg max E q(x) [log p(y, x θ)] θ Monte
Monte Carlo Methods Leon Gu CSD, CMU Approximate Inference EM: y-observed variables; x-hidden variables; θ-parameters; E-step: q(x) = p(x y, θ t 1 ) M-step: θ t = arg max E q(x) [log p(y, x θ)] θ Monte
Transport maps and dimension reduction for Bayesian computation Youssef Marzouk
 Transport maps and dimension reduction for Bayesian computation Youssef Marzouk Massachusetts Institute of Technology Department of Aeronautics & Astronautics Center for Computational Engineering http://uqgroup.mit.edu
Transport maps and dimension reduction for Bayesian computation Youssef Marzouk Massachusetts Institute of Technology Department of Aeronautics & Astronautics Center for Computational Engineering http://uqgroup.mit.edu
Markov Chain Monte Carlo
 1 Motivation 1.1 Bayesian Learning Markov Chain Monte Carlo Yale Chang In Bayesian learning, given data X, we make assumptions on the generative process of X by introducing hidden variables Z: p(z): prior
1 Motivation 1.1 Bayesian Learning Markov Chain Monte Carlo Yale Chang In Bayesian learning, given data X, we make assumptions on the generative process of X by introducing hidden variables Z: p(z): prior
Markov Chain Monte Carlo Methods for Stochastic
 Markov Chain Monte Carlo Methods for Stochastic Optimization i John R. Birge The University of Chicago Booth School of Business Joint work with Nicholas Polson, Chicago Booth. JRBirge U Florida, Nov 2013
Markov Chain Monte Carlo Methods for Stochastic Optimization i John R. Birge The University of Chicago Booth School of Business Joint work with Nicholas Polson, Chicago Booth. JRBirge U Florida, Nov 2013
Adaptive Monte Carlo methods
 Adaptive Monte Carlo methods Jean-Michel Marin Projet Select, INRIA Futurs, Université Paris-Sud joint with Randal Douc (École Polytechnique), Arnaud Guillin (Université de Marseille) and Christian Robert
Adaptive Monte Carlo methods Jean-Michel Marin Projet Select, INRIA Futurs, Université Paris-Sud joint with Randal Douc (École Polytechnique), Arnaud Guillin (Université de Marseille) and Christian Robert
Sequential Monte Carlo Methods (for DSGE Models)
") Sequential Monte Carlo Methods (for DSGE Models) Frank Schorfheide University of Pennsylvania, PIER, CEPR, and NBER October 23, 2017 Some References These lectures use material from our joint work: Tempered
Sequential Monte Carlo Methods (for DSGE Models) Frank Schorfheide University of Pennsylvania, PIER, CEPR, and NBER October 23, 2017 Some References These lectures use material from our joint work: Tempered
Bayesian Prediction of Code Output. ASA Albuquerque Chapter Short Course October 2014
 Bayesian Prediction of Code Output ASA Albuquerque Chapter Short Course October 2014 Abstract This presentation summarizes Bayesian prediction methodology for the Gaussian process (GP) surrogate representation
Bayesian Prediction of Code Output ASA Albuquerque Chapter Short Course October 2014 Abstract This presentation summarizes Bayesian prediction methodology for the Gaussian process (GP) surrogate representation
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Statistical Estimation of the Parameters of a PDE
 PIMS-MITACS 2001 1 Statistical Estimation of the Parameters of a PDE Colin Fox, Geoff Nicholls (University of Auckland) Nomenclature for image recovery Statistical model for inverse problems Traditional
PIMS-MITACS 2001 1 Statistical Estimation of the Parameters of a PDE Colin Fox, Geoff Nicholls (University of Auckland) Nomenclature for image recovery Statistical model for inverse problems Traditional
Monte Carlo Markov Chains: A Brief Introduction and Implementation. Jennifer Helsby Astro 321
 Monte Carlo Markov Chains: A Brief Introduction and Implementation Jennifer Helsby Astro 321 What are MCMC: Markov Chain Monte Carlo Methods? Set of algorithms that generate posterior distributions by
Monte Carlo Markov Chains: A Brief Introduction and Implementation Jennifer Helsby Astro 321 What are MCMC: Markov Chain Monte Carlo Methods? Set of algorithms that generate posterior distributions by
Estimation theory and information geometry based on denoising
 Estimation theory and information geometry based on denoising Aapo Hyvärinen Dept of Computer Science & HIIT Dept of Mathematics and Statistics University of Helsinki Finland 1 Abstract What is the best
Estimation theory and information geometry based on denoising Aapo Hyvärinen Dept of Computer Science & HIIT Dept of Mathematics and Statistics University of Helsinki Finland 1 Abstract What is the best
Strong Lens Modeling (II): Statistical Methods
: Statistical Methods") Strong Lens Modeling (II): Statistical Methods Chuck Keeton Rutgers, the State University of New Jersey Probability theory multiple random variables, a and b joint distribution p(a, b) conditional distribution
Strong Lens Modeling (II): Statistical Methods Chuck Keeton Rutgers, the State University of New Jersey Probability theory multiple random variables, a and b joint distribution p(a, b) conditional distribution
Markov Chain Monte Carlo (MCMC) and Model Evaluation. August 15, 2017
 and Model Evaluation. August 15, 2017") Markov Chain Monte Carlo (MCMC) and Model Evaluation August 15, 2017 Frequentist Linking Frequentist and Bayesian Statistics How can we estimate model parameters and what does it imply? Want to find the
Markov Chain Monte Carlo (MCMC) and Model Evaluation August 15, 2017 Frequentist Linking Frequentist and Bayesian Statistics How can we estimate model parameters and what does it imply? Want to find the
Introduction to Systems Analysis and Decision Making Prepared by: Jakub Tomczak
 Introduction to Systems Analysis and Decision Making Prepared by: Jakub Tomczak 1 Introduction. Random variables During the course we are interested in reasoning about considered phenomenon. In other words,
Introduction to Systems Analysis and Decision Making Prepared by: Jakub Tomczak 1 Introduction. Random variables During the course we are interested in reasoning about considered phenomenon. In other words,
Econometrics I, Estimation
 Econometrics I, Estimation Department of Economics Stanford University September, 2008 Part I Parameter, Estimator, Estimate A parametric is a feature of the population. An estimator is a function of the
Econometrics I, Estimation Department of Economics Stanford University September, 2008 Part I Parameter, Estimator, Estimate A parametric is a feature of the population. An estimator is a function of the
Robert Collins CSE586, PSU Intro to Sampling Methods
 Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Topics to be Covered Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling (CDF) Ancestral Sampling Rejection
Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Topics to be Covered Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling (CDF) Ancestral Sampling Rejection
Simulation - Lectures - Part III Markov chain Monte Carlo
 Simulation - Lectures - Part III Markov chain Monte Carlo Julien Berestycki Part A Simulation and Statistical Programming Hilary Term 2018 Part A Simulation. HT 2018. J. Berestycki. 1 / 50 Outline Markov
Simulation - Lectures - Part III Markov chain Monte Carlo Julien Berestycki Part A Simulation and Statistical Programming Hilary Term 2018 Part A Simulation. HT 2018. J. Berestycki. 1 / 50 Outline Markov
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistical Sciences! rsalakhu@cs.toronto.edu! h0p://www.cs.utoronto.ca/~rsalakhu/ Lecture 7 Approximate
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistical Sciences! rsalakhu@cs.toronto.edu! h0p://www.cs.utoronto.ca/~rsalakhu/ Lecture 7 Approximate
Augmented Tikhonov Regularization
 Augmented Tikhonov Regularization Bangti JIN Universität Bremen, Zentrum für Technomathematik Seminar, November 14, 2008 Outline 1 Background 2 Bayesian inference 3 Augmented Tikhonov regularization 4
Augmented Tikhonov Regularization Bangti JIN Universität Bremen, Zentrum für Technomathematik Seminar, November 14, 2008 Outline 1 Background 2 Bayesian inference 3 Augmented Tikhonov regularization 4
A quick introduction to Markov chains and Markov chain Monte Carlo (revised version)
") A quick introduction to Markov chains and Markov chain Monte Carlo (revised version) Rasmus Waagepetersen Institute of Mathematical Sciences Aalborg University 1 Introduction These notes are intended to
A quick introduction to Markov chains and Markov chain Monte Carlo (revised version) Rasmus Waagepetersen Institute of Mathematical Sciences Aalborg University 1 Introduction These notes are intended to
σ(a) = a N (x; 0, 1 2 ) dx. σ(a) = Φ(a) =
 = a N (x; 0, 1 2 ) dx. σ(a) = Φ(a) =") Until now we have always worked with likelihoods and prior distributions that were conjugate to each other, allowing the computation of the posterior distribution to be done in closed form. Unfortunately,
Until now we have always worked with likelihoods and prior distributions that were conjugate to each other, allowing the computation of the posterior distribution to be done in closed form. Unfortunately,
Review. DS GA 1002 Statistical and Mathematical Models. Carlos Fernandez-Granda
 Review DS GA 1002 Statistical and Mathematical Models http://www.cims.nyu.edu/~cfgranda/pages/dsga1002_fall16 Carlos Fernandez-Granda Probability and statistics Probability: Framework for dealing with
Review DS GA 1002 Statistical and Mathematical Models http://www.cims.nyu.edu/~cfgranda/pages/dsga1002_fall16 Carlos Fernandez-Granda Probability and statistics Probability: Framework for dealing with
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Computer Intensive Methods in Mathematical Statistics
 Computer Intensive Methods in Mathematical Statistics Department of mathematics johawes@kth.se Lecture 16 Advanced topics in computational statistics 18 May 2017 Computer Intensive Methods (1) Plan of
Computer Intensive Methods in Mathematical Statistics Department of mathematics johawes@kth.se Lecture 16 Advanced topics in computational statistics 18 May 2017 Computer Intensive Methods (1) Plan of
Markov Networks.
 Markov Networks www.biostat.wisc.edu/~dpage/cs760/ Goals for the lecture you should understand the following concepts Markov network syntax Markov network semantics Potential functions Partition function
Markov Networks www.biostat.wisc.edu/~dpage/cs760/ Goals for the lecture you should understand the following concepts Markov network syntax Markov network semantics Potential functions Partition function
Computational statistics
 Computational statistics Markov Chain Monte Carlo methods Thierry Denœux March 2017 Thierry Denœux Computational statistics March 2017 1 / 71 Contents of this chapter When a target density f can be evaluated
Computational statistics Markov Chain Monte Carlo methods Thierry Denœux March 2017 Thierry Denœux Computational statistics March 2017 1 / 71 Contents of this chapter When a target density f can be evaluated
Hierarchical Bayesian Inversion
 Hierarchical Bayesian Inversion Andrew M Stuart Computing and Mathematical Sciences, Caltech cw/ S. Agapiou, J. Bardsley and O. Papaspiliopoulos SIAM/ASA JUQ 2(2014), pp. 511--544 cw/ M. Dunlop and M.
Hierarchical Bayesian Inversion Andrew M Stuart Computing and Mathematical Sciences, Caltech cw/ S. Agapiou, J. Bardsley and O. Papaspiliopoulos SIAM/ASA JUQ 2(2014), pp. 511--544 cw/ M. Dunlop and M.
ST 740: Markov Chain Monte Carlo
 ST 740: Markov Chain Monte Carlo Alyson Wilson Department of Statistics North Carolina State University October 14, 2012 A. Wilson (NCSU Stsatistics) MCMC October 14, 2012 1 / 20 Convergence Diagnostics:
ST 740: Markov Chain Monte Carlo Alyson Wilson Department of Statistics North Carolina State University October 14, 2012 A. Wilson (NCSU Stsatistics) MCMC October 14, 2012 1 / 20 Convergence Diagnostics:
Hierarchical models. Dr. Jarad Niemi. August 31, Iowa State University. Jarad Niemi (Iowa State) Hierarchical models August 31, / 31
 Hierarchical models August 31, / 31") Hierarchical models Dr. Jarad Niemi Iowa State University August 31, 2017 Jarad Niemi (Iowa State) Hierarchical models August 31, 2017 1 / 31 Normal hierarchical model Let Y ig N(θ g, σ 2 ) for i = 1,...,
Hierarchical models Dr. Jarad Niemi Iowa State University August 31, 2017 Jarad Niemi (Iowa State) Hierarchical models August 31, 2017 1 / 31 Normal hierarchical model Let Y ig N(θ g, σ 2 ) for i = 1,...,
BAYESIAN METHODS FOR VARIABLE SELECTION WITH APPLICATIONS TO HIGH-DIMENSIONAL DATA
 BAYESIAN METHODS FOR VARIABLE SELECTION WITH APPLICATIONS TO HIGH-DIMENSIONAL DATA Intro: Course Outline and Brief Intro to Marina Vannucci Rice University, USA PASI-CIMAT 04/28-30/2010 Marina Vannucci
BAYESIAN METHODS FOR VARIABLE SELECTION WITH APPLICATIONS TO HIGH-DIMENSIONAL DATA Intro: Course Outline and Brief Intro to Marina Vannucci Rice University, USA PASI-CIMAT 04/28-30/2010 Marina Vannucci
Parallel Tempering I
 Parallel Tempering I this is a fancy (M)etropolis-(H)astings algorithm it is also called (M)etropolis (C)oupled MCMC i.e. MCMCMC! (as the name suggests,) it consists of running multiple MH chains in parallel
Parallel Tempering I this is a fancy (M)etropolis-(H)astings algorithm it is also called (M)etropolis (C)oupled MCMC i.e. MCMCMC! (as the name suggests,) it consists of running multiple MH chains in parallel
MCMC Methods: Gibbs and Metropolis
 MCMC Methods: Gibbs and Metropolis Patrick Breheny February 28 Patrick Breheny BST 701: Bayesian Modeling in Biostatistics 1/30 Introduction As we have seen, the ability to sample from the posterior distribution
MCMC Methods: Gibbs and Metropolis Patrick Breheny February 28 Patrick Breheny BST 701: Bayesian Modeling in Biostatistics 1/30 Introduction As we have seen, the ability to sample from the posterior distribution
A Review of Pseudo-Marginal Markov Chain Monte Carlo
 A Review of Pseudo-Marginal Markov Chain Monte Carlo Discussed by: Yizhe Zhang October 21, 2016 Outline 1 Overview 2 Paper review 3 experiment 4 conclusion Motivation & overview Notation: θ denotes the
A Review of Pseudo-Marginal Markov Chain Monte Carlo Discussed by: Yizhe Zhang October 21, 2016 Outline 1 Overview 2 Paper review 3 experiment 4 conclusion Motivation & overview Notation: θ denotes the
Quantifying Uncertainty
 Sai Ravela M. I. T Last Updated: Spring 2013 1 Markov Chain Monte Carlo Monte Carlo sampling made for large scale problems via Markov Chains Monte Carlo Sampling Rejection Sampling Importance Sampling
Sai Ravela M. I. T Last Updated: Spring 2013 1 Markov Chain Monte Carlo Monte Carlo sampling made for large scale problems via Markov Chains Monte Carlo Sampling Rejection Sampling Importance Sampling