Structured Uncertainty. Block diagonal
|
|
|
- Mildred Norman
- 6 years ago
- Views:
Transcription
1 Structured Uncertainty Block diagonal
2
3 Example δ 0.1, 1 δ 1 1 2
4
5
6 error : N yw ( s)
7 Example 5.9
8
9 The Structured Singular Value and Stability Robustness
10 Assume nominal closed-loop system N(s) is stable Any unstable pole of this system are caused by closing the loop through perturbation and are the solution of Stability robustness may be evaluated by the size of the smallest perturbation that results in a pole in RHP(destabilizing perturbation).
11 ( jω) : any perturbation(with the appropriate block structure )that place a pole at a specific point jω. [ j ] σ ( ω) : the size of ( jω)
12 A system is robustly stable if and only if the smallest destabilizing perturbation is greater than 1 We assumed 1. So if the smallest destabilizing perturbation is greater than 1, the system is always stable for any 1, If NOT, we can always find the destabilizing perturbation which is less than or equal to 1.
13 Structured Singular Value
14
15 Upper bounds Bounds on SSV
16 Conservative bound. Too loose.
17
18
19
20
21 Example 5.10
22
23 µ ( N ) = 1 min max 1,


24
25 Example 5.12
26
27
28 % Example Robust stability evaluation using the structured % singular value. clear % Define the state model for the transfer function Mydwd. A=[ e6 0-55]; B=[ ]; C=[-3e ]; D=zeros(3); % Generate the frequency response for this system. w=logspace(0,3); M11=pck(A,B,C,D); fr=frsp(m11,w);
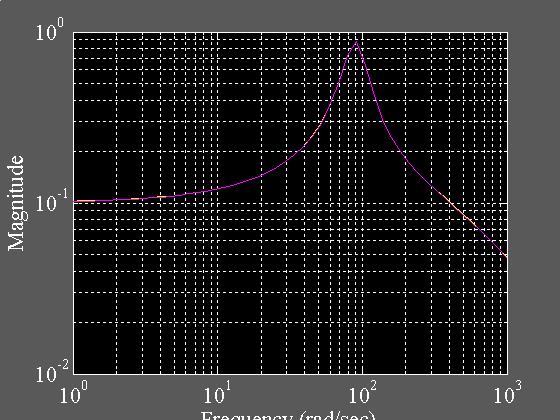
29 % Compute the structured singular value from the frequency response. % Define the block structure. blk=ones(3,2); % Compute the SSV. mum=mu(fr,blk); % Plot the results. set(0,'defaultaxesfontname','times') set(0,'defaultaxesfontsize',16) set(0,'defaulttextfontname','times') figure(1) clf vplot('liv,lm',mum) xlabel('frequency (rad/sec)') ylabel('magnitude') grid % Compute the maximum of the SSV. maxmu=max(mum(:,1))
30
31 >> points completed maxmu = >> blk blk = >>
32 MATLAB2010 % Example Robust stability evaluation using the structured % singular value. clear % Define the state model for the transfer function Mydwd. A=[ e6 0-55]; B=[ ]; C=[-3e ]; D=zeros(3); % Generate the frequency response for this system. w=logspace(0,3); M11=ss(A,B,C,D); fr=frd(m11,w);
33 % Compute the structured singular value from the frequency response. % Define the block structure. blk=ones(3,2); % Compute the SSV. [mum, muinfo] =mussv(fr,blk); % Plot the results. set(0,'defaultaxesfontname','times') set(0,'defaultaxesfontsize',16) set(0,'defaulttextfontname','times') figure(1) clf %vplot('liv,lm',mum) P = bodeoptions; P.MagUnits = 'abs'; P.MagScale = 'log'; P.PhaseVisible = 'off'; bode(mum(:,1),'c',mum(:,2),'r',p) xlabel('frequency (rad/sec)') ylabel('magnitude') grid % Compute the maximum of the SSV. maxmu=max(frdata(mum(:,1))) MATLAB2010
34 10 0 Bode Diagram Magnitude (abs) Frequency (rad/sec) (rad/sec) points completed (of 50) maxmu =
35 Additional Properties of SSV
36 µ ( N) σ ( N)
37
38 Performance Robustness
39
40
41 Example 5.13
42 H( jω) W( jω) 1 10 ω 10 W( jω) = 0 ω > 10 1 H( jω) W( jω) W( jω) 150 = jω + 10
43
44
45 x = x 0.2 w + K( r x ) = ( 1 K) x 0.2w + Kr 1 1 d 1 1 x = 10x + 150( r x ) = 150x 10x + 150r d
46 x 1 1 K 0 x1 0.2 K wd = + x x r 2 2 y 1 0 x1 e = w 0 1 x 2
47 % Example Robust performance analysis using the structured % singular value. clear % Enter the controller gain. K=50; % Enter the nominal closed loop system. Acl=[-1-K ]; Bcl=[-0.2 K 0 150]; Ccl=[ ]; M=pck(Acl,Bcl,Ccl,zeros(2)); % Compute the frequency response of the nominal closed loop system. w=logspace(0,2,30); fr=frsp(m,w);
48 % Compute the SSV from the frequency reponse. blk=ones(2); bnds=mu(fr,blk); % Plot the results. set(0,'defaultaxesfontname','times') set(0,'defaultaxesfontsize',16) set(0,'defaulttextfontname','times') figure(1) clf vplot('liv,m',bnds) axis([ ]) xlabel('frequency (rad/sec)') ylabel('ssv') grid
49
50 MATLAB2010 % Example Robust performance analysis using the structured % singular value. clear % Enter the controller gain. K=50; % Enter the nominal closed loop system. Acl=[-1-K ]; Bcl=[-0.2 K 0 150]; Ccl=[ ]; M=ss(Acl,Bcl,Ccl,zeros(2)); % Compute the frequency response of the nominal closed loop system. w=logspace(0,2,30); fr=frd(m,w);
51 % Compute the SSV from the frequency reponse. blk=ones(2); bnds=mussv(fr,blk); % Plot the results. set(0,'defaultaxesfontname','times') set(0,'defaultaxesfontsize',16) set(0,'defaulttextfontname','times') figure(1) clf %vplot('liv,m',bnds) P = bodeoptions; P.Title.String = 'SSV plot'; P.MagUnits = 'abs'; P.MagScale = 'linear'; P.PhaseVisible = 'off'; P.XLim = {[1 100]}; P.YLim = {[0 2.5]}; P.Grid = 'on'; P.YLabel.String = {'SSV' ''}; bode(bnds(:,1),'r',bnds(:,2),'g',p) MATLAB2010
52 2.5 SSV plot SSV (abs) Frequency (rad/sec)
Entering Matrices
 MATLAB Basic Entering Matrices Transpose Subscripts The Colon Operator Operators Generating Matrices Element-by-element operation Creating a Plot Multiple Data Sets in One Graph Line Styles and Colors
MATLAB Basic Entering Matrices Transpose Subscripts The Colon Operator Operators Generating Matrices Element-by-element operation Creating a Plot Multiple Data Sets in One Graph Line Styles and Colors
Structured Uncertainty and Robust Performance
 Structured Uncertainty and Robust Performance ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Devron Profile Control Solutions Outline Structured uncertainty: motivating example. Structured
Structured Uncertainty and Robust Performance ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Devron Profile Control Solutions Outline Structured uncertainty: motivating example. Structured
FREQUENCY-RESPONSE DESIGN
 ECE45/55: Feedback Control Systems. 9 FREQUENCY-RESPONSE DESIGN 9.: PD and lead compensation networks The frequency-response methods we have seen so far largely tell us about stability and stability margins
ECE45/55: Feedback Control Systems. 9 FREQUENCY-RESPONSE DESIGN 9.: PD and lead compensation networks The frequency-response methods we have seen so far largely tell us about stability and stability margins
Model Uncertainty and Robust Stability for Multivariable Systems
 Model Uncertainty and Robust Stability for Multivariable Systems ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Devron Profile Control Solutions Outline Representing model uncertainty.
Model Uncertainty and Robust Stability for Multivariable Systems ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Devron Profile Control Solutions Outline Representing model uncertainty.
K(s +2) s +20 K (s + 10)(s +1) 2. (c) KG(s) = K(s + 10)(s +1) (s + 100)(s +5) 3. Solution : (a) KG(s) = s +20 = K s s
 s +20 K (s + 10)(s +1) 2. (c) KG(s) = K(s + 10)(s +1) (s + 100)(s +5) 3. Solution : (a) KG(s) = s +20 = K s s") 321 16. Determine the range of K for which each of the following systems is stable by making a Bode plot for K = 1 and imagining the magnitude plot sliding up or down until instability results. Verify
321 16. Determine the range of K for which each of the following systems is stable by making a Bode plot for K = 1 and imagining the magnitude plot sliding up or down until instability results. Verify
ROBUST STABILITY AND PERFORMANCE ANALYSIS* [8 # ]
![ROBUST STABILITY AND PERFORMANCE ANALYSIS* [8 # ]](/thumbs/89/99011882.jpg "ROBUST STABILITY AND PERFORMANCE ANALYSIS* [8 # ]") ROBUST STABILITY AND PERFORMANCE ANALYSIS* [8 # ] General control configuration with uncertainty [8.1] For our robustness analysis we use a system representation in which the uncertain perturbations are
ROBUST STABILITY AND PERFORMANCE ANALYSIS* [8 # ] General control configuration with uncertainty [8.1] For our robustness analysis we use a system representation in which the uncertain perturbations are
Uncertainty and Robustness for SISO Systems
 Uncertainty and Robustness for SISO Systems ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Outline Nature of uncertainty (models and signals). Physical sources of model uncertainty. Mathematical
Uncertainty and Robustness for SISO Systems ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Outline Nature of uncertainty (models and signals). Physical sources of model uncertainty. Mathematical
Control System Design
 ELEC ENG 4CL4: Control System Design Notes for Lecture #11 Wednesday, January 28, 2004 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Relative Stability: Stability
ELEC ENG 4CL4: Control System Design Notes for Lecture #11 Wednesday, January 28, 2004 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Relative Stability: Stability
Lecture 16 FREQUENCY RESPONSE OF SIMPLE CIRCUITS
 Lecture 6 FREQUENCY RESPONSE OF SIMPLE CIRCUITS Ray DeCarlo School of ECE Purdue University West Lafayette, IN 47907-285 decarlo@ecn.purdue.edu EE-202, Frequency Response p 2 R. A. DeCarlo I. WHAT IS FREQUENCY
Lecture 6 FREQUENCY RESPONSE OF SIMPLE CIRCUITS Ray DeCarlo School of ECE Purdue University West Lafayette, IN 47907-285 decarlo@ecn.purdue.edu EE-202, Frequency Response p 2 R. A. DeCarlo I. WHAT IS FREQUENCY
Chapter 6 - Solved Problems
 Chapter 6 - Solved Problems Solved Problem 6.. Contributed by - James Welsh, University of Newcastle, Australia. Find suitable values for the PID parameters using the Z-N tuning strategy for the nominal
Chapter 6 - Solved Problems Solved Problem 6.. Contributed by - James Welsh, University of Newcastle, Australia. Find suitable values for the PID parameters using the Z-N tuning strategy for the nominal
MIMO analysis: loop-at-a-time
 MIMO robustness MIMO analysis: loop-at-a-time y 1 y 2 P (s) + + K 2 (s) r 1 r 2 K 1 (s) Plant: P (s) = 1 s 2 + α 2 s α 2 α(s + 1) α(s + 1) s α 2. (take α = 10 in the following numerical analysis) Controller:
MIMO robustness MIMO analysis: loop-at-a-time y 1 y 2 P (s) + + K 2 (s) r 1 r 2 K 1 (s) Plant: P (s) = 1 s 2 + α 2 s α 2 α(s + 1) α(s + 1) s α 2. (take α = 10 in the following numerical analysis) Controller:
Lecture 6. Chapter 8: Robust Stability and Performance Analysis for MIMO Systems. Eugenio Schuster.
 Lecture 6 Chapter 8: Robust Stability and Performance Analysis for MIMO Systems Eugenio Schuster schuster@lehigh.edu Mechanical Engineering and Mechanics Lehigh University Lecture 6 p. 1/73 6.1 General
Lecture 6 Chapter 8: Robust Stability and Performance Analysis for MIMO Systems Eugenio Schuster schuster@lehigh.edu Mechanical Engineering and Mechanics Lehigh University Lecture 6 p. 1/73 6.1 General
FEL3210 Multivariable Feedback Control
 FEL3210 Multivariable Feedback Control Lecture 5: Uncertainty and Robustness in SISO Systems [Ch.7-(8)] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 5:Uncertainty and Robustness () FEL3210 MIMO
FEL3210 Multivariable Feedback Control Lecture 5: Uncertainty and Robustness in SISO Systems [Ch.7-(8)] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 5:Uncertainty and Robustness () FEL3210 MIMO
Robust Performance Example #1
 Robust Performance Example # The transfer function for a nominal system (plant) is given, along with the transfer function for one extreme system. These two transfer functions define a family of plants
Robust Performance Example # The transfer function for a nominal system (plant) is given, along with the transfer function for one extreme system. These two transfer functions define a family of plants
Topic # Feedback Control Systems
 Topic #19 16.31 Feedback Control Systems Stengel Chapter 6 Question: how well do the large gain and phase margins discussed for LQR map over to DOFB using LQR and LQE (called LQG)? Fall 2010 16.30/31 19
Topic #19 16.31 Feedback Control Systems Stengel Chapter 6 Question: how well do the large gain and phase margins discussed for LQR map over to DOFB using LQR and LQE (called LQG)? Fall 2010 16.30/31 19
Design Methods for Control Systems
 Design Methods for Control Systems Maarten Steinbuch TU/e Gjerrit Meinsma UT Dutch Institute of Systems and Control Winter term 2002-2003 Schedule November 25 MSt December 2 MSt Homework # 1 December 9
Design Methods for Control Systems Maarten Steinbuch TU/e Gjerrit Meinsma UT Dutch Institute of Systems and Control Winter term 2002-2003 Schedule November 25 MSt December 2 MSt Homework # 1 December 9
Outline. Classical Control. Lecture 1
 Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
EE 4343/ Control System Design Project LECTURE 10
 Copyright S. Ikenaga 998 All rights reserved EE 4343/5329 - Control System Design Project LECTURE EE 4343/5329 Homepage EE 4343/5329 Course Outline Design of Phase-lead and Phase-lag compensators using
Copyright S. Ikenaga 998 All rights reserved EE 4343/5329 - Control System Design Project LECTURE EE 4343/5329 Homepage EE 4343/5329 Course Outline Design of Phase-lead and Phase-lag compensators using
An Internal Stability Example
 An Internal Stability Example Roy Smith 26 April 2015 To illustrate the concept of internal stability we will look at an example where there are several pole-zero cancellations between the controller and
An Internal Stability Example Roy Smith 26 April 2015 To illustrate the concept of internal stability we will look at an example where there are several pole-zero cancellations between the controller and
FEL3210 Multivariable Feedback Control
 FEL3210 Multivariable Feedback Control Lecture 6: Robust stability and performance in MIMO systems [Ch.8] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 6: Robust Stability and Performance () FEL3210
FEL3210 Multivariable Feedback Control Lecture 6: Robust stability and performance in MIMO systems [Ch.8] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 6: Robust Stability and Performance () FEL3210
Systems Analysis and Control
 Systems Analysis and Control Matthew M. Peet Illinois Institute of Technology Lecture 23: Drawing The Nyquist Plot Overview In this Lecture, you will learn: Review of Nyquist Drawing the Nyquist Plot Using
Systems Analysis and Control Matthew M. Peet Illinois Institute of Technology Lecture 23: Drawing The Nyquist Plot Overview In this Lecture, you will learn: Review of Nyquist Drawing the Nyquist Plot Using
Linear Control Systems Lecture #3 - Frequency Domain Analysis. Guillaume Drion Academic year
 Linear Control Systems Lecture #3 - Frequency Domain Analysis Guillaume Drion Academic year 2018-2019 1 Goal and Outline Goal: To be able to analyze the stability and robustness of a closed-loop system
Linear Control Systems Lecture #3 - Frequency Domain Analysis Guillaume Drion Academic year 2018-2019 1 Goal and Outline Goal: To be able to analyze the stability and robustness of a closed-loop system
ECSE 4962 Control Systems Design. A Brief Tutorial on Control Design
 ECSE 4962 Control Systems Design A Brief Tutorial on Control Design Instructor: Professor John T. Wen TA: Ben Potsaid http://www.cat.rpi.edu/~wen/ecse4962s04/ Don t Wait Until The Last Minute! You got
ECSE 4962 Control Systems Design A Brief Tutorial on Control Design Instructor: Professor John T. Wen TA: Ben Potsaid http://www.cat.rpi.edu/~wen/ecse4962s04/ Don t Wait Until The Last Minute! You got
Robust Control. 2nd class. Spring, 2018 Instructor: Prof. Masayuki Fujita (S5-303B) Tue., 17th April, 2018, 10:45~12:15, S423 Lecture Room
 Tue., 17th April, 2018, 10:45~12:15, S423 Lecture Room") Robust Control Spring, 2018 Instructor: Prof. Masayuki Fujita (S5-303B) 2nd class Tue., 17th April, 2018, 10:45~12:15, S423 Lecture Room 2. Nominal Performance 2.1 Weighted Sensitivity [SP05, Sec. 2.8,
Robust Control Spring, 2018 Instructor: Prof. Masayuki Fujita (S5-303B) 2nd class Tue., 17th April, 2018, 10:45~12:15, S423 Lecture Room 2. Nominal Performance 2.1 Weighted Sensitivity [SP05, Sec. 2.8,
Lecture 13: Internal Model Principle and Repetitive Control
 ME 233, UC Berkeley, Spring 2014 Xu Chen Lecture 13: Internal Model Principle and Repetitive Control Big picture review of integral control in PID design example: 0 Es) C s) Ds) + + P s) Y s) where P s)
ME 233, UC Berkeley, Spring 2014 Xu Chen Lecture 13: Internal Model Principle and Repetitive Control Big picture review of integral control in PID design example: 0 Es) C s) Ds) + + P s) Y s) where P s)
Topic # Feedback Control. State-Space Systems Closed-loop control using estimators and regulators. Dynamics output feedback
 Topic #17 16.31 Feedback Control State-Space Systems Closed-loop control using estimators and regulators. Dynamics output feedback Back to reality Copyright 21 by Jonathan How. All Rights reserved 1 Fall
Topic #17 16.31 Feedback Control State-Space Systems Closed-loop control using estimators and regulators. Dynamics output feedback Back to reality Copyright 21 by Jonathan How. All Rights reserved 1 Fall
Frequency methods for the analysis of feedback systems. Lecture 6. Loop analysis of feedback systems. Nyquist approach to study stability
 Lecture 6. Loop analysis of feedback systems 1. Motivation 2. Graphical representation of frequency response: Bode and Nyquist curves 3. Nyquist stability theorem 4. Stability margins Frequency methods
Lecture 6. Loop analysis of feedback systems 1. Motivation 2. Graphical representation of frequency response: Bode and Nyquist curves 3. Nyquist stability theorem 4. Stability margins Frequency methods
Systems Analysis and Control
 Systems Analysis and Control Matthew M. Peet Arizona State University Lecture 23: Drawing The Nyquist Plot Overview In this Lecture, you will learn: Review of Nyquist Drawing the Nyquist Plot Using the
Systems Analysis and Control Matthew M. Peet Arizona State University Lecture 23: Drawing The Nyquist Plot Overview In this Lecture, you will learn: Review of Nyquist Drawing the Nyquist Plot Using the
9. Two-Degrees-of-Freedom Design
 9. Two-Degrees-of-Freedom Design In some feedback schemes we have additional degrees-offreedom outside the feedback path. For example, feed forwarding known disturbance signals or reference signals. In
9. Two-Degrees-of-Freedom Design In some feedback schemes we have additional degrees-offreedom outside the feedback path. For example, feed forwarding known disturbance signals or reference signals. In
EECE 460. Decentralized Control of MIMO Systems. Guy A. Dumont. Department of Electrical and Computer Engineering University of British Columbia
 EECE 460 Decentralized Control of MIMO Systems Guy A. Dumont Department of Electrical and Computer Engineering University of British Columbia January 2011 Guy A. Dumont (UBC EECE) EECE 460 - Decentralized
EECE 460 Decentralized Control of MIMO Systems Guy A. Dumont Department of Electrical and Computer Engineering University of British Columbia January 2011 Guy A. Dumont (UBC EECE) EECE 460 - Decentralized
Multi-Objective Robust Control of Rotor/Active Magnetic Bearing Systems
 Multi-Objective Robust Control of Rotor/Active Magnetic Bearing Systems İbrahim Sina Kuseyri Ph.D. Dissertation June 13, 211 İ. Sina Kuseyri (B.U. Mech.E.) Robust Control of Rotor/AMB Systems June 13,
Multi-Objective Robust Control of Rotor/Active Magnetic Bearing Systems İbrahim Sina Kuseyri Ph.D. Dissertation June 13, 211 İ. Sina Kuseyri (B.U. Mech.E.) Robust Control of Rotor/AMB Systems June 13,
6.1 Sketch the z-domain root locus and find the critical gain for the following systems K., the closed-loop characteristic equation is K + z 0.
 6. Sketch the z-domain root locus and find the critical gain for the following systems K (i) Gz () z 4. (ii) Gz K () ( z+ 9. )( z 9. ) (iii) Gz () Kz ( z. )( z ) (iv) Gz () Kz ( + 9. ) ( z. )( z 8. ) (i)
6. Sketch the z-domain root locus and find the critical gain for the following systems K (i) Gz () z 4. (ii) Gz K () ( z+ 9. )( z 9. ) (iii) Gz () Kz ( z. )( z ) (iv) Gz () Kz ( + 9. ) ( z. )( z 8. ) (i)
Chapter Stability Robustness Introduction Last chapter showed how the Nyquist stability criterion provides conditions for the stability robustness of
 Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter Stability
Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter Stability
Frequency Response Analysis
 Frequency Response Analysis Consider let the input be in the form Assume that the system is stable and the steady state response of the system to a sinusoidal inputdoes not depend on the initial conditions
Frequency Response Analysis Consider let the input be in the form Assume that the system is stable and the steady state response of the system to a sinusoidal inputdoes not depend on the initial conditions
Lecture 15: H Control Synthesis
 c A. Shiriaev/L. Freidovich. March 12, 2010. Optimal Control for Linear Systems: Lecture 15 p. 1/14 Lecture 15: H Control Synthesis Example c A. Shiriaev/L. Freidovich. March 12, 2010. Optimal Control
c A. Shiriaev/L. Freidovich. March 12, 2010. Optimal Control for Linear Systems: Lecture 15 p. 1/14 Lecture 15: H Control Synthesis Example c A. Shiriaev/L. Freidovich. March 12, 2010. Optimal Control
Chapter 2. Classical Control System Design. Dutch Institute of Systems and Control
 Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
r + - FINAL June 12, 2012 MAE 143B Linear Control Prof. M. Krstic
 MAE 43B Linear Control Prof. M. Krstic FINAL June, One sheet of hand-written notes (two pages). Present your reasoning and calculations clearly. Inconsistent etchings will not be graded. Write answers
MAE 43B Linear Control Prof. M. Krstic FINAL June, One sheet of hand-written notes (two pages). Present your reasoning and calculations clearly. Inconsistent etchings will not be graded. Write answers
Stability and Robustness 1
 Lecture 2 Stability and Robustness This lecture discusses the role of stability in feedback design. The emphasis is notonyes/notestsforstability,butratheronhowtomeasurethedistanceto instability. The small
Lecture 2 Stability and Robustness This lecture discusses the role of stability in feedback design. The emphasis is notonyes/notestsforstability,butratheronhowtomeasurethedistanceto instability. The small
6.241 Dynamic Systems and Control
 6.241 Dynamic Systems and Control Lecture 17: Robust Stability Readings: DDV, Chapters 19, 20 Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology April 6, 2011 E. Frazzoli
6.241 Dynamic Systems and Control Lecture 17: Robust Stability Readings: DDV, Chapters 19, 20 Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology April 6, 2011 E. Frazzoli
Unit 11 - Week 7: Quantitative feedback theory (Part 1/2)
") X reviewer3@nptel.iitm.ac.in Courses» Control System Design Announcements Course Ask a Question Progress Mentor FAQ Unit 11 - Week 7: Quantitative feedback theory (Part 1/2) Course outline How to access
X reviewer3@nptel.iitm.ac.in Courses» Control System Design Announcements Course Ask a Question Progress Mentor FAQ Unit 11 - Week 7: Quantitative feedback theory (Part 1/2) Course outline How to access
Plan of the Lecture. Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control
 Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic:
Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic:
Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control
 Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control Goal: understand the difference between open-loop and closed-loop (feedback)
Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control Goal: understand the difference between open-loop and closed-loop (feedback)
ROBUST STABILITY AND PERFORMANCE ANALYSIS OF UNSTABLE PROCESS WITH DEAD TIME USING Mu SYNTHESIS
 ROBUST STABILITY AND PERFORMANCE ANALYSIS OF UNSTABLE PROCESS WITH DEAD TIME USING Mu SYNTHESIS I. Thirunavukkarasu 1, V. I. George 1, G. Saravana Kumar 1 and A. Ramakalyan 2 1 Department o Instrumentation
ROBUST STABILITY AND PERFORMANCE ANALYSIS OF UNSTABLE PROCESS WITH DEAD TIME USING Mu SYNTHESIS I. Thirunavukkarasu 1, V. I. George 1, G. Saravana Kumar 1 and A. Ramakalyan 2 1 Department o Instrumentation
Problem Set 4 Solution 1
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.245: MULTIVARIABLE CONTROL SYSTEMS by A. Megretski Problem Set 4 Solution Problem 4. For the SISO feedback
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.245: MULTIVARIABLE CONTROL SYSTEMS by A. Megretski Problem Set 4 Solution Problem 4. For the SISO feedback
Analysis of SISO Control Loops
 Chapter 5 Analysis of SISO Control Loops Topics to be covered For a given controller and plant connected in feedback we ask and answer the following questions: Is the loop stable? What are the sensitivities
Chapter 5 Analysis of SISO Control Loops Topics to be covered For a given controller and plant connected in feedback we ask and answer the following questions: Is the loop stable? What are the sensitivities
(Continued on next page)
") (Continued on next page) 18.2 Roots of Stability Nyquist Criterion 87 e(s) 1 S(s) = =, r(s) 1 + P (s)c(s) where P (s) represents the plant transfer function, and C(s) the compensator. The closedloop characteristic
(Continued on next page) 18.2 Roots of Stability Nyquist Criterion 87 e(s) 1 S(s) = =, r(s) 1 + P (s)c(s) where P (s) represents the plant transfer function, and C(s) the compensator. The closedloop characteristic
Closed Loop Transfer Functions
 Closed Loop Transfer Functions The following script illustrates and demonstrates key control concepts discussed in class on Feb 21 and Feb 23rd. Use these notes to understand how to specify transfer functions
Closed Loop Transfer Functions The following script illustrates and demonstrates key control concepts discussed in class on Feb 21 and Feb 23rd. Use these notes to understand how to specify transfer functions
The loop shaping paradigm. Lecture 7. Loop analysis of feedback systems (2) Essential specifications (2)
 Essential specifications (2)") Lecture 7. Loop analysis of feedback systems (2). Loop shaping 2. Performance limitations The loop shaping paradigm. Estimate performance and robustness of the feedback system from the loop transfer L(jω)
Lecture 7. Loop analysis of feedback systems (2). Loop shaping 2. Performance limitations The loop shaping paradigm. Estimate performance and robustness of the feedback system from the loop transfer L(jω)
Control Systems I. Lecture 9: The Nyquist condition
 Control Systems I Lecture 9: The Nyquist condition Readings: Åstrom and Murray, Chapter 9.1 4 www.cds.caltech.edu/~murray/amwiki/index.php/first_edition Jacopo Tani Institute for Dynamic Systems and Control
Control Systems I Lecture 9: The Nyquist condition Readings: Åstrom and Murray, Chapter 9.1 4 www.cds.caltech.edu/~murray/amwiki/index.php/first_edition Jacopo Tani Institute for Dynamic Systems and Control
Analysis of Discrete-Time Systems
 TU Berlin Discrete-Time Control Systems 1 Analysis of Discrete-Time Systems Overview Stability Sensitivity and Robustness Controllability, Reachability, Observability, and Detectabiliy TU Berlin Discrete-Time
TU Berlin Discrete-Time Control Systems 1 Analysis of Discrete-Time Systems Overview Stability Sensitivity and Robustness Controllability, Reachability, Observability, and Detectabiliy TU Berlin Discrete-Time
= rad/sec. We can find the last parameter, T, from ωcg new
 EE572 Solution to HW#22. Keep working on your project!! 1. Consider the following system: W(s) + T s =1 msec G lead (z) G zoh (z) 8 ( s+ 4) - a) Design a lead compensator, G lead (z), which meets the following
EE572 Solution to HW#22. Keep working on your project!! 1. Consider the following system: W(s) + T s =1 msec G lead (z) G zoh (z) 8 ( s+ 4) - a) Design a lead compensator, G lead (z), which meets the following
Robustness Analysis and Controller Synthesis with Non-Normalized Coprime Factor Uncertainty Characterisation
 211 5th IEEE onference on Decision and ontrol and European ontrol onference (D-E) Orlando, FL, USA, December 12-15, 211 Robustness Analysis and ontroller Synthesis with Non-Normalized oprime Factor Uncertainty
211 5th IEEE onference on Decision and ontrol and European ontrol onference (D-E) Orlando, FL, USA, December 12-15, 211 Robustness Analysis and ontroller Synthesis with Non-Normalized oprime Factor Uncertainty
Systems Analysis and Control
 Systems Analysis and Control Matthew M. Peet Arizona State University Lecture 21: Stability Margins and Closing the Loop Overview In this Lecture, you will learn: Closing the Loop Effect on Bode Plot Effect
Systems Analysis and Control Matthew M. Peet Arizona State University Lecture 21: Stability Margins and Closing the Loop Overview In this Lecture, you will learn: Closing the Loop Effect on Bode Plot Effect
QFT Framework for Robust Tuning of Power System Stabilizers
 45-E-PSS-75 QFT Framework for Robust Tuning of Power System Stabilizers Seyyed Mohammad Mahdi Alavi, Roozbeh Izadi-Zamanabadi Department of Control Engineering, Aalborg University, Denmark Correspondence
45-E-PSS-75 QFT Framework for Robust Tuning of Power System Stabilizers Seyyed Mohammad Mahdi Alavi, Roozbeh Izadi-Zamanabadi Department of Control Engineering, Aalborg University, Denmark Correspondence
1 (s + 3)(s + 2)(s + a) G(s) = C(s) = K P + K I
(s + 2)(s + a) G(s) = C(s) = K P + K I") MAE 43B Linear Control Prof. M. Krstic FINAL June 9, Problem. ( points) Consider a plant in feedback with the PI controller G(s) = (s + 3)(s + )(s + a) C(s) = K P + K I s. (a) (4 points) For a given constant
MAE 43B Linear Control Prof. M. Krstic FINAL June 9, Problem. ( points) Consider a plant in feedback with the PI controller G(s) = (s + 3)(s + )(s + a) C(s) = K P + K I s. (a) (4 points) For a given constant
The Nyquist criterion relates the stability of a closed system to the open-loop frequency response and open loop pole location.
 Introduction to the Nyquist criterion The Nyquist criterion relates the stability of a closed system to the open-loop frequency response and open loop pole location. Mapping. If we take a complex number
Introduction to the Nyquist criterion The Nyquist criterion relates the stability of a closed system to the open-loop frequency response and open loop pole location. Mapping. If we take a complex number
FREQUENCY RESPONSE ANALYSIS Closed Loop Frequency Response
 Closed Loop Frequency Response The Bode plot is generally constructed for an open loop transfer function of a system. In order to draw the Bode plot for a closed loop system, the transfer function has
Closed Loop Frequency Response The Bode plot is generally constructed for an open loop transfer function of a system. In order to draw the Bode plot for a closed loop system, the transfer function has
100 (s + 10) (s + 100) e 0.5s. s 100 (s + 10) (s + 100). G(s) =
 (s + 100) e 0.5s. s 100 (s + 10) (s + 100). G(s) =") 1 AME 3315; Spring 215; Midterm 2 Review (not graded) Problems: 9.3 9.8 9.9 9.12 except parts 5 and 6. 9.13 except parts 4 and 5 9.28 9.34 You are given the transfer function: G(s) = 1) Plot the bode plot
1 AME 3315; Spring 215; Midterm 2 Review (not graded) Problems: 9.3 9.8 9.9 9.12 except parts 5 and 6. 9.13 except parts 4 and 5 9.28 9.34 You are given the transfer function: G(s) = 1) Plot the bode plot
From the multivariable Nyquist plot, if 1/k < or 1/k > 5.36, or 0.19 < k < 2.7, then the closed loop system is stable.
 1. (a) Multivariable Nyquist Plot (diagonal uncertainty case) dash=neg freq solid=pos freq 2.5 2 1.5 1.5 Im -.5-1 -1.5-2 -2.5 1 2 3 4 5 Re From the multivariable Nyquist plot, if 1/k < -.37 or 1/k > 5.36,
1. (a) Multivariable Nyquist Plot (diagonal uncertainty case) dash=neg freq solid=pos freq 2.5 2 1.5 1.5 Im -.5-1 -1.5-2 -2.5 1 2 3 4 5 Re From the multivariable Nyquist plot, if 1/k < -.37 or 1/k > 5.36,
Chapter 7 - Solved Problems
 Chapter 7 - Solved Problems Solved Problem 7.1. A continuous time system has transfer function G o (s) given by G o (s) = B o(s) A o (s) = 2 (s 1)(s + 2) = 2 s 2 + s 2 (1) Find a controller of minimal
Chapter 7 - Solved Problems Solved Problem 7.1. A continuous time system has transfer function G o (s) given by G o (s) = B o(s) A o (s) = 2 (s 1)(s + 2) = 2 s 2 + s 2 (1) Find a controller of minimal
Lecture 7 (Weeks 13-14)
") Lecture 7 (Weeks 13-14) Introduction to Multivariable Control (SP - Chapters 3 & 4) Eugenio Schuster schuster@lehigh.edu Mechanical Engineering and Mechanics Lehigh University Lecture 7 (Weeks 13-14) p.
Lecture 7 (Weeks 13-14) Introduction to Multivariable Control (SP - Chapters 3 & 4) Eugenio Schuster schuster@lehigh.edu Mechanical Engineering and Mechanics Lehigh University Lecture 7 (Weeks 13-14) p.
Synthesis of Controllers for Non-minimum Phase and Unstable Systems Using Non-sequential MIMO Quantitative Feedback Theory
 Synthesis of Controllers for Non-minimum Phase and Unstable Systems Using Non-sequential MIMO Quantitative Feedback Theory Chen-yang Lan Murray L Kerr Suhada Jayasuriya * Graduate Student Graduate Student
Synthesis of Controllers for Non-minimum Phase and Unstable Systems Using Non-sequential MIMO Quantitative Feedback Theory Chen-yang Lan Murray L Kerr Suhada Jayasuriya * Graduate Student Graduate Student
Topic # Feedback Control Systems
 Topic #20 16.31 Feedback Control Systems Closed-loop system analysis Bounded Gain Theorem Robust Stability Fall 2007 16.31 20 1 SISO Performance Objectives Basic setup: d i d o r u y G c (s) G(s) n control
Topic #20 16.31 Feedback Control Systems Closed-loop system analysis Bounded Gain Theorem Robust Stability Fall 2007 16.31 20 1 SISO Performance Objectives Basic setup: d i d o r u y G c (s) G(s) n control
Exercise 1 (A Non-minimum Phase System)
") Prof. Dr. E. Frazzoli 5-59- Control Systems I (HS 25) Solution Exercise Set Loop Shaping Noele Norris, 9th December 26 Exercise (A Non-minimum Phase System) To increase the rise time of the system, we
Prof. Dr. E. Frazzoli 5-59- Control Systems I (HS 25) Solution Exercise Set Loop Shaping Noele Norris, 9th December 26 Exercise (A Non-minimum Phase System) To increase the rise time of the system, we
Control Systems I. Lecture 6: Poles and Zeros. Readings: Emilio Frazzoli. Institute for Dynamic Systems and Control D-MAVT ETH Zürich
 Control Systems I Lecture 6: Poles and Zeros Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 27, 2017 E. Frazzoli (ETH) Lecture 6: Control Systems I 27/10/2017
Control Systems I Lecture 6: Poles and Zeros Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 27, 2017 E. Frazzoli (ETH) Lecture 6: Control Systems I 27/10/2017
MEM 355 Performance Enhancement of Dynamical Systems
 MEM 355 Performance Enhancement of Dynamical Systems Frequency Domain Design Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University 5/8/25 Outline Closed Loop Transfer Functions
MEM 355 Performance Enhancement of Dynamical Systems Frequency Domain Design Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University 5/8/25 Outline Closed Loop Transfer Functions
Poles, Zeros, and Frequency Response
 Poles, Zeros, and Frequency Response With the previous circuits, you can build filters with Real poles Complex Poles, and Zeros at s = 0 Filter design uses this to places poles and zeros to give a desired
Poles, Zeros, and Frequency Response With the previous circuits, you can build filters with Real poles Complex Poles, and Zeros at s = 0 Filter design uses this to places poles and zeros to give a desired
Problem Weight Score Total 100
 EE 350 EXAM IV 15 December 2010 Last Name (Print): First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO DO SO Problem Weight Score 1 25 2 25 3 25 4 25 Total
EE 350 EXAM IV 15 December 2010 Last Name (Print): First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO DO SO Problem Weight Score 1 25 2 25 3 25 4 25 Total
Problem Set 3: Solution Due on Mon. 7 th Oct. in class. Fall 2013
 EE 56: Digital Control Systems Problem Set 3: Solution Due on Mon 7 th Oct in class Fall 23 Problem For the causal LTI system described by the difference equation y k + 2 y k = x k, () (a) By first finding
EE 56: Digital Control Systems Problem Set 3: Solution Due on Mon 7 th Oct in class Fall 23 Problem For the causal LTI system described by the difference equation y k + 2 y k = x k, () (a) By first finding
Analysis of Discrete-Time Systems
 TU Berlin Discrete-Time Control Systems TU Berlin Discrete-Time Control Systems 2 Stability Definitions We define stability first with respect to changes in the initial conditions Analysis of Discrete-Time
TU Berlin Discrete-Time Control Systems TU Berlin Discrete-Time Control Systems 2 Stability Definitions We define stability first with respect to changes in the initial conditions Analysis of Discrete-Time
CHAPTER 2 TRANSFER FUNCTION ANALYSIS
 . Introduction CHAPTER TRANSFER FUNCTION ANALYSIS The purpose of this chapter is to illustrate how to derive equations of motion for Multi Degree of Freedom (mdof) systems and how to solve for their transfer
. Introduction CHAPTER TRANSFER FUNCTION ANALYSIS The purpose of this chapter is to illustrate how to derive equations of motion for Multi Degree of Freedom (mdof) systems and how to solve for their transfer
Exercise 1 (A Non-minimum Phase System)
") Prof. Dr. E. Frazzoli 5-59- Control Systems I (Autumn 27) Solution Exercise Set 2 Loop Shaping clruch@ethz.ch, 8th December 27 Exercise (A Non-minimum Phase System) To decrease the rise time of the system,
Prof. Dr. E. Frazzoli 5-59- Control Systems I (Autumn 27) Solution Exercise Set 2 Loop Shaping clruch@ethz.ch, 8th December 27 Exercise (A Non-minimum Phase System) To decrease the rise time of the system,
Control Systems 2. Lecture 4: Sensitivity function limits. Roy Smith
 Control Systems 2 Lecture 4: Sensitivity function limits Roy Smith 2017-3-14 4.1 Input-output controllability Control design questions: 1. How well can the plant be controlled? 2. What control structure
Control Systems 2 Lecture 4: Sensitivity function limits Roy Smith 2017-3-14 4.1 Input-output controllability Control design questions: 1. How well can the plant be controlled? 2. What control structure
A Comparative Study on Automatic Flight Control for small UAV
 Proceedings of the 5 th International Conference of Control, Dynamic Systems, and Robotics (CDSR'18) Niagara Falls, Canada June 7 9, 18 Paper No. 13 DOI: 1.11159/cdsr18.13 A Comparative Study on Automatic
Proceedings of the 5 th International Conference of Control, Dynamic Systems, and Robotics (CDSR'18) Niagara Falls, Canada June 7 9, 18 Paper No. 13 DOI: 1.11159/cdsr18.13 A Comparative Study on Automatic
Topic # Feedback Control
 Topic #4 16.31 Feedback Control Stability in the Frequency Domain Nyquist Stability Theorem Examples Appendix (details) This is the basis of future robustness tests. Fall 2007 16.31 4 2 Frequency Stability
Topic #4 16.31 Feedback Control Stability in the Frequency Domain Nyquist Stability Theorem Examples Appendix (details) This is the basis of future robustness tests. Fall 2007 16.31 4 2 Frequency Stability
APPLICATION OF D-K ITERATION TECHNIQUE BASED ON H ROBUST CONTROL THEORY FOR POWER SYSTEM STABILIZER DESIGN
 APPLICATION OF D-K ITERATION TECHNIQUE BASED ON H ROBUST CONTROL THEORY FOR POWER SYSTEM STABILIZER DESIGN Amitava Sil 1 and S Paul 2 1 Department of Electrical & Electronics Engineering, Neotia Institute
APPLICATION OF D-K ITERATION TECHNIQUE BASED ON H ROBUST CONTROL THEORY FOR POWER SYSTEM STABILIZER DESIGN Amitava Sil 1 and S Paul 2 1 Department of Electrical & Electronics Engineering, Neotia Institute
Analyzing the Stability Robustness of Interval Polynomials
 1 Analyzing the Stability Robustness of Interval Polynomials Prof. Guy Beale Electrical and Computer Engineering Department George Mason University Correspondence concerning this paper should be sent to
1 Analyzing the Stability Robustness of Interval Polynomials Prof. Guy Beale Electrical and Computer Engineering Department George Mason University Correspondence concerning this paper should be sent to
The Generalized Nyquist Criterion and Robustness Margins with Applications
 51st IEEE Conference on Decision and Control December 10-13, 2012. Maui, Hawaii, USA The Generalized Nyquist Criterion and Robustness Margins with Applications Abbas Emami-Naeini and Robert L. Kosut Abstract
51st IEEE Conference on Decision and Control December 10-13, 2012. Maui, Hawaii, USA The Generalized Nyquist Criterion and Robustness Margins with Applications Abbas Emami-Naeini and Robert L. Kosut Abstract
CDS 101/110a: Lecture 10-1 Robust Performance
 CDS 11/11a: Lecture 1-1 Robust Performance Richard M. Murray 1 December 28 Goals: Describe how to represent uncertainty in process dynamics Describe how to analyze a system in the presence of uncertainty
CDS 11/11a: Lecture 1-1 Robust Performance Richard M. Murray 1 December 28 Goals: Describe how to represent uncertainty in process dynamics Describe how to analyze a system in the presence of uncertainty
Didier HENRION henrion
 GRADUATE COURSE ON POLYNOMIAL METHODS FOR ROBUST CONTROL PART II.1 ROBUST STABILITY ANALYSIS: POLYTOPIC UNCERTAINTY Didier HENRION www.laas.fr/ henrion henrion@laas.fr Cité de l espace with Ariane launcher
GRADUATE COURSE ON POLYNOMIAL METHODS FOR ROBUST CONTROL PART II.1 ROBUST STABILITY ANALYSIS: POLYTOPIC UNCERTAINTY Didier HENRION www.laas.fr/ henrion henrion@laas.fr Cité de l espace with Ariane launcher
Classify a transfer function to see which order or ramp it can follow and with which expected error.
 Dr. J. Tani, Prof. Dr. E. Frazzoli 5-059-00 Control Systems I (Autumn 208) Exercise Set 0 Topic: Specifications for Feedback Systems Discussion: 30.. 208 Learning objectives: The student can grizzi@ethz.ch,
Dr. J. Tani, Prof. Dr. E. Frazzoli 5-059-00 Control Systems I (Autumn 208) Exercise Set 0 Topic: Specifications for Feedback Systems Discussion: 30.. 208 Learning objectives: The student can grizzi@ethz.ch,
CHAPTER 11 FREQUENCY RESPONSE: MODAL STATE SPACE FORM
 CHAPTER 11 FREQUENCY RESPONSE: MODAL STATE SPACE FORM 11.1 Introduction In Chapter 1 we constructed the modal form of the state equations for the overall frequency response as well as for the individual
CHAPTER 11 FREQUENCY RESPONSE: MODAL STATE SPACE FORM 11.1 Introduction In Chapter 1 we constructed the modal form of the state equations for the overall frequency response as well as for the individual
Chapter Robust Performance and Introduction to the Structured Singular Value Function Introduction As discussed in Lecture 0, a process is better desc
 Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter Robust
Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter Robust
Chapter 5. Standard LTI Feedback Optimization Setup. 5.1 The Canonical Setup
 Chapter 5 Standard LTI Feedback Optimization Setup Efficient LTI feedback optimization algorithms comprise a major component of modern feedback design approach: application problems involving complex models
Chapter 5 Standard LTI Feedback Optimization Setup Efficient LTI feedback optimization algorithms comprise a major component of modern feedback design approach: application problems involving complex models
Automatic Control 2. Loop shaping. Prof. Alberto Bemporad. University of Trento. Academic year
 Automatic Control 2 Loop shaping Prof. Alberto Bemporad University of Trento Academic year 21-211 Prof. Alberto Bemporad (University of Trento) Automatic Control 2 Academic year 21-211 1 / 39 Feedback
Automatic Control 2 Loop shaping Prof. Alberto Bemporad University of Trento Academic year 21-211 Prof. Alberto Bemporad (University of Trento) Automatic Control 2 Academic year 21-211 1 / 39 Feedback
QFT design for uncertain non-minimum phase and unstable plants revisited
 Loughborough University Institutional Repository QFT design for uncertain non-minimum phase and unstable plants revisited This item was submitted to Loughborough University's Institutional Repository by
Loughborough University Institutional Repository QFT design for uncertain non-minimum phase and unstable plants revisited This item was submitted to Loughborough University's Institutional Repository by
Introduction to Feedback Control
 Introduction to Feedback Control Control System Design Why Control? Open-Loop vs Closed-Loop (Feedback) Why Use Feedback Control? Closed-Loop Control System Structure Elements of a Feedback Control System
Introduction to Feedback Control Control System Design Why Control? Open-Loop vs Closed-Loop (Feedback) Why Use Feedback Control? Closed-Loop Control System Structure Elements of a Feedback Control System
Robust Stability based PI Controller Design with Additive Uncertainty Weight for AGC (Automatic Generation Control) Application
 Application") International Journal of Electrical and Computer Engineering. ISSN 0974-2190 Volume 6, Number 1 (2014), pp. 35-46 International Research Publication House http://www.irphouse.com Robust Stability based
International Journal of Electrical and Computer Engineering. ISSN 0974-2190 Volume 6, Number 1 (2014), pp. 35-46 International Research Publication House http://www.irphouse.com Robust Stability based
Homework 7 - Solutions
 Homework 7 - Solutions Note: This homework is worth a total of 48 points. 1. Compensators (9 points) For a unity feedback system given below, with G(s) = K s(s + 5)(s + 11) do the following: (c) Find the
Homework 7 - Solutions Note: This homework is worth a total of 48 points. 1. Compensators (9 points) For a unity feedback system given below, with G(s) = K s(s + 5)(s + 11) do the following: (c) Find the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering Dynamics and Control II Fall 2007
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering.4 Dynamics and Control II Fall 7 Problem Set #9 Solution Posted: Sunday, Dec., 7. The.4 Tower system. The system parameters are
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering.4 Dynamics and Control II Fall 7 Problem Set #9 Solution Posted: Sunday, Dec., 7. The.4 Tower system. The system parameters are
Didier HENRION henrion
 POLYNOMIAL METHODS FOR ROBUST CONTROL PART I.1 ROBUST STABILITY ANALYSIS: SINGLE PARAMETER UNCERTAINTY Didier HENRION www.laas.fr/ henrion henrion@laas.fr Pont Neuf over river Garonne in Toulouse June
POLYNOMIAL METHODS FOR ROBUST CONTROL PART I.1 ROBUST STABILITY ANALYSIS: SINGLE PARAMETER UNCERTAINTY Didier HENRION www.laas.fr/ henrion henrion@laas.fr Pont Neuf over river Garonne in Toulouse June
Today (10/23/01) Today. Reading Assignment: 6.3. Gain/phase margin lead/lag compensator Ref. 6.4, 6.7, 6.10
 Today. Reading Assignment: 6.3. Gain/phase margin lead/lag compensator Ref. 6.4, 6.7, 6.10") Today Today (10/23/01) Gain/phase margin lead/lag compensator Ref. 6.4, 6.7, 6.10 Reading Assignment: 6.3 Last Time In the last lecture, we discussed control design through shaping of the loop gain GK:
Today Today (10/23/01) Gain/phase margin lead/lag compensator Ref. 6.4, 6.7, 6.10 Reading Assignment: 6.3 Last Time In the last lecture, we discussed control design through shaping of the loop gain GK:
Control Systems I. Lecture 9: The Nyquist condition
 Control Systems I Lecture 9: The Nyquist condition adings: Guzzella, Chapter 9.4 6 Åstrom and Murray, Chapter 9.1 4 www.cds.caltech.edu/~murray/amwiki/index.php/first_edition Emilio Frazzoli Institute
Control Systems I Lecture 9: The Nyquist condition adings: Guzzella, Chapter 9.4 6 Åstrom and Murray, Chapter 9.1 4 www.cds.caltech.edu/~murray/amwiki/index.php/first_edition Emilio Frazzoli Institute
Robust Control. 8th class. Spring, 2018 Instructor: Prof. Masayuki Fujita (S5-303B) Tue., 29th May, 2018, 10:45~11:30, S423 Lecture Room
 Tue., 29th May, 2018, 10:45~11:30, S423 Lecture Room") Robust Control Spring, 2018 Instructor: Prof. Masayuki Fujita (S5-303B) 8th class Tue., 29th May, 2018, 10:45~11:30, S423 Lecture Room 1 8. Design Example 8.1 HiMAT: Control (Highly Maneuverable Aircraft
Robust Control Spring, 2018 Instructor: Prof. Masayuki Fujita (S5-303B) 8th class Tue., 29th May, 2018, 10:45~11:30, S423 Lecture Room 1 8. Design Example 8.1 HiMAT: Control (Highly Maneuverable Aircraft
An Overview on Robust Control
 Advanced Control An Overview on Robust Control P C Scope Keywords Prerequisites allow the student to assess the potential of different methods in robust control without entering deep into theory. Sensitize
Advanced Control An Overview on Robust Control P C Scope Keywords Prerequisites allow the student to assess the potential of different methods in robust control without entering deep into theory. Sensitize
Structured singular values for Bernoulli matrices
 Int. J. Adv. Appl. Math. and Mech. 44 2017 41 49 ISSN: 2347-2529 IJAAMM Journal homepage: www.ijaamm.com International Journal of Advances in Applied Mathematics and Mechanics Structured singular values
Int. J. Adv. Appl. Math. and Mech. 44 2017 41 49 ISSN: 2347-2529 IJAAMM Journal homepage: www.ijaamm.com International Journal of Advances in Applied Mathematics and Mechanics Structured singular values
Overview of Bode Plots Transfer function review Piece-wise linear approximations First-order terms Second-order terms (complex poles & zeros)
") Overview of Bode Plots Transfer function review Piece-wise linear approximations First-order terms Second-order terms (complex poles & zeros) J. McNames Portland State University ECE 222 Bode Plots Ver.
Overview of Bode Plots Transfer function review Piece-wise linear approximations First-order terms Second-order terms (complex poles & zeros) J. McNames Portland State University ECE 222 Bode Plots Ver.
2.010 Fall 2000 Solution of Homework Assignment 1
 2. Fall 2 Solution of Homework Assignment. Compact Disk Player. This is essentially a reprise of Problems and 2 from the Fall 999 2.3 Homework Assignment 7. t is included here to encourage you to review
2. Fall 2 Solution of Homework Assignment. Compact Disk Player. This is essentially a reprise of Problems and 2 from the Fall 999 2.3 Homework Assignment 7. t is included here to encourage you to review
MEM Chapter 2. Sensitivity Function Matrices
 Applied Robust Control, Chap 2, 2012 Spring 1 MEM800-007 Chapter 2 Sensitivity Function Matrices r e K u d y G Loop transfer function matrix: L GK Sensitivity function matrix: S ( I L) Complementary Sensitivity
Applied Robust Control, Chap 2, 2012 Spring 1 MEM800-007 Chapter 2 Sensitivity Function Matrices r e K u d y G Loop transfer function matrix: L GK Sensitivity function matrix: S ( I L) Complementary Sensitivity
Return Difference Function and Closed-Loop Roots Single-Input/Single-Output Control Systems
 Spectral Properties of Linear- Quadratic Regulators Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 2018! Stability margins of single-input/singleoutput (SISO) systems! Characterizations
Spectral Properties of Linear- Quadratic Regulators Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 2018! Stability margins of single-input/singleoutput (SISO) systems! Characterizations