A model-based approach to control over packet-switching networks, with application to Industrial Ethernet
|
|
|
- Baldric Nelson
- 6 years ago
- Views:
Transcription
1 A model-based approach to control over packet-switching networks, with application to Industrial Ethernet Universitá di Pisa Centro di Ricerca Interdipartimentale E. Piaggio Laurea specialistica in Ingegneria dell Automazione Relatori: PROF. ING. A.BICCHI PROF. ING. M.INNOCENTI DOTT. ING. S.FALASCA Cidato: (Universitá di Pisa) December 17, / 23
 December 17, 2010 2")
2 Networked Control Systems: structure inherent problems (Universitá di Pisa) December 17, / 23
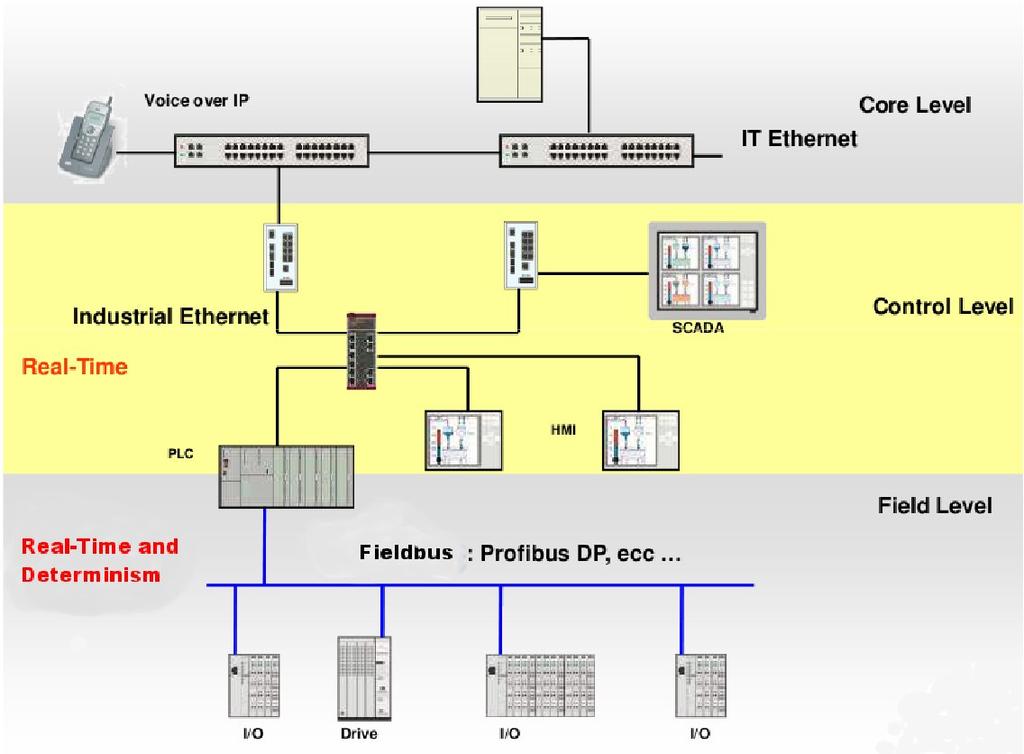



3 classical architecture the new trend in automation (Universitá di Pisa) December 17, / 23
4 classical architecture the new trend in automation (Universitá di Pisa) December 17, / 23
5 Uniform architecture: advantages drawbacks Advantages: transmission speed increased up to 1 Gbit/s increased ability of wiring long distances the possibility to use an uniform structure the ability to connect several hundreds of nodes (Universitá di Pisa) December 17, / 23
 December 17, 2010 4 / 23")
6 Uniform architecture: advantages drawbacks Advantages: transmission speed increased up to 1 Gbit/s increased ability of wiring long distances the possibility to use an uniform structure the ability to connect several hundreds of nodes Drawbacks: (Universitá di Pisa) December 17, / 23
 December 17, 2010 5 / 23")
7 Goals of this work Goals: lowering the packet rate exploiting the bwidth ensuring a certain quality of performace of the control tolerate larger network delays (Universitá di Pisa) December 17, / 23
8 General assumptions: 1) the trasmission is time-periodic 2) no packet dropout occurr 3) the acquisition of all packets measurements, w.r.t. a given sending time, is guaranteed 4) the quantization effect can be neglected 5) sensors actuators are time-driven, while the controller is event-driven 6) the overall state of the plant is sensorized (Universitá di Pisa) December 17, / 23
9 definitions Definition 1: the sending time of the sensors is defined as an increasing sequence: τ = {τ i } : τ i > 0, i N (Universitá di Pisa) December 17, / 23
10 definitions Definition 1: the sending time of the sensors is defined as an increasing sequence: τ = {τ i } : τ i > 0, i N Definition 2: the overall delays of the control-loop are defined as a sequence: δ = {δ i } : { δ : δ i < δ i N} (Universitá di Pisa) December 17, / 23
11 definitions Definition 1: the sending time of the sensors is defined as an increasing sequence: τ = {τ i } : τ i > 0, i N Definition 2: the overall delays of the control-loop are defined as a sequence: δ = {δ i } : { δ : δ i < δ i N} Definition 3: the Maximum Allowable Time Interval (MATI) on the sensors side, between two consecutive successfull accesses to the network, is defined as: σ : 0 < (τ i+1 τ i ) σ i N (Universitá di Pisa) December 17, / 23
12 approach (Universitá di Pisa) December 17, / 23
 τ i < H, i N (Universitá di Pisa) December")
13 approach Packet filler the Horizon H: 1 the packet will be filled by the controller as: { } t u k,τ = h(ξ k,τ, ˆx k,τ, r k ) : τ = max τ i τ : τ i + δ i T, k = τ i N T T, τ + 1,..., τ + H T T 2 in order for the plant not to remain without an available control, we must assure the following condition to hold: (τ i+1 + δ i+1 ) τ i < H, i N (Universitá di Pisa) December 17, / 23
14 Effectiveness of the control approach: This is aimed at providing insights on the merits of the proposed strategy in terms of bwidth economy real-time hardness for the communication link respect to a classical control approach. will focus on the meaning the effects of the choice of various parameters such as the horizon of prediction (h), the time interval between two consecutive successfull accesses to the network (σ) (MATI), the computational power (k cmp ). characterization of a frame: B = B f + hb c (Universitá di Pisa) December 17, / 23
15 Effectiveness of the control approach: This is aimed at providing insights on the merits of the proposed strategy in terms of bwidth economy real-time hardness for the communication link respect to a classical control approach. will focus on the meaning the effects of the choice of various parameters such as the horizon of prediction (h), the time interval between two consecutive successfull accesses to the network (σ) (MATI), the computational power (k cmp ). characterization of a frame: B = B f + hb c overall delay: δ = δ net + k cmp h (Universitá di Pisa) December 17, / 23
16 Horizon of control: h σ + δ (Universitá di Pisa) December 17, / 23
17 Horizon of control: h σ + δ h σ+δnet 1 k cmp, 0 < (1 kcmp ) < 1 for definition (Universitá di Pisa) December 17, / 23
18 Horizon of control: h σ + δ h σ+δnet 1 k cmp, 0 < (1 kcmp ) < 1 for definition there is a portion of overlapping comm (h σ) control steps. This computation overhead is a necessary drawback as long as large delays have to be tolerated. h = σ + δ net 1 k cmp (Universitá di Pisa) December 17, / 23
19 Horizon of control: h σ + δ h σ+δnet 1 k cmp, 0 < (1 kcmp ) < 1 for definition there is a portion of overlapping comm (h σ) control steps. This computation overhead is a necessary drawback as long as large delays have to be tolerated. Cost of a single control value: h = σ + δ net 1 k cmp B f + hb c h δ (Universitá di Pisa) December 17, / 23
20 Horizon of control: h σ + δ h σ+δnet 1 k cmp, 0 < (1 kcmp ) < 1 for definition there is a portion of overlapping comm (h σ) control steps. This computation overhead is a necessary drawback as long as large delays have to be tolerated. Cost of a single control value: h = σ + δ net 1 k cmp B f + hb c h δ Comparison between the classical control approach PBC: B f + B c B f +hbc h δ (Universitá di Pisa) December 17, / 23
21 Horizon of control: h σ + δ h σ+δnet 1 k cmp, 0 < (1 kcmp ) < 1 for definition there is a portion of overlapping comm (h σ) control steps. This computation overhead is a necessary drawback as long as large delays have to be tolerated. Cost of a single control value: h = σ + δ net 1 k cmp B f + hb c h δ Comparison between the classical control approach PBC: B f + B c B f +hbc h δ h B f Bc (1+δnet )+δ net B h = σ+δ net f Bc (1 kcmp ) k cmp 1 k cmp B f Bc (1+δnet )+δ net B f Bc (1 kcmp ) k cmp (Universitá di Pisa) December 17, / 23
22 analisys A set of sufficient conditions that ensure the satisfaction of inequalities is given by: k cmp 1 Bc B f σ B f Bc (δnet + 1) (Universitá di Pisa) December 17, / 23
23 analisys A set of sufficient conditions that ensure the satisfaction of inequalities is given by: k cmp 1 Bc B f σ B f Bc (δnet + 1) expresses bounds for the minimum computational speed the maximum time incurring between two consecutive sensor readings, both expressed as function of the network parameters (namely the cost of the fixed data contained in each packet, the cost of a single control value the upper bound for the network delay). following figure shows how the packets are used considering an horizon h = 8 delay δ = 3. (Universitá di Pisa) December 17, / 23

24 Benchmark Cutting a Circle aim of this case study is to control a machine tool. Cutting a circle is a meaningful benchmark both for general CNC machines especially for machines controlled over a network. (Universitá di Pisa) December 17, / 23


25 machine tool (CNC) cutting must be performed by controlling linear motion of two axes (X Z ). y are orthogonal to each other. X axis consists of three functional parts: the driven train, the sledge, the machine bed, coupled by a conversion element that allows translation between rotatory translational movement. Since the Z axis is mounted on the X axis, its model is composed by the sledge the bed: (Universitá di Pisa) December 17, / 23
26 controller for the motion control: controllers of the two axes are decoupled. control over network can cause different delays for the motion of the axes introducing a phase offset that distorts the resulting trajectory from a circular to an elliptic shape. feedback controller of each axis is realized as a cascade controller. (Universitá di Pisa) December 17, / 23
 scheme, it allows to apply different Quality of Service (QoS) strategies for the traffic classes.")
27 network: PROFINET main characteristic of PROFINET is the capability to distinguish different traffic classes. stard is based on a Time-Division Multiplexing (TDM) scheme, it allows to apply different Quality of Service (QoS) strategies for the traffic classes. Time is subdivided into a fixed communication cycle that is repeated over over again. Traffic classes IRT class: each communication cycle starts with red-phase. In this class the synchronization is necessary non-real time class: the green-phase is dedicated for the communication non-real-time transistion phase: it is the yellow-phase at the end of the green interval. In this interval, the frames are only sent out if they are short enough so that their trasmission ends before the start of the next cycle (Universitá di Pisa) December 17, / 23
28 Benchmarks: ISO specifies methods of testing evaluating the circular deviation during the motion along the circular path, produced by the simultaneous movements of two axes. For the problem in h, Siemens has choosen used three relevant benchmarks. Average radial relative error: deviation of the average radius of the generated trajectory from the desired radius: e A = r d ra r d Maximum radial relative error: maximal absolute deviation from the average radius calculated: r(t) r a e S = max t [0,T ] r d Area error: represents the average distance of the tool from its desired position during the motion: e T = 1 r d T T x d (t) x(t) dt 0 where x d (t) is the desired trajectory defined over time, x(t) the contour realized by the machine tool, r d, r a are respectively the desired radius the average radius. (Universitá di Pisa) December 17, / 23
29 main parameters : All relevant parameters for a simulation application control are listed in the tables, as provided by Siemens. Parameter Meaning of parameter Value R Setpoint radius of circle 5cm V Cutting speed 6m/min jitter on sampling of the sensor jitter 1µs Network parameters Trasmission bit rate 100 Mbit/s Network delay 3µs Time Data Cycle T DC 125µs Jitter of delay 0.5µs (Universitá di Pisa) December 17, / 23
 December 17, 2010 18")
30 A simulator for the Control approach (Universitá di Pisa) December 17, / 23
31 Simulation results: Index loss in performance: For evaluating the loss in performance due to the control over network, we have fixed, for the three benchmarks, an index comparing between the control without network (b nominal ) the same performance indicators with network (b net ): I = b net b nominal b nominal. (Universitá di Pisa) December 17, / 23
32 Simulation results: Index loss in performance: For evaluating the loss in performance due to the control over network, we have fixed, for the three benchmarks, an index comparing between the control without network (b nominal ) the same performance indicators with network (b net ): Siemens performance loss: I = b net b nominal b nominal. area error average radial rel. error maximum radial rel. error Conventional control (Universitá di Pisa) December 17, / 23
33 Simulation results PBC approach: We assume to represent each control value on 8 bytes, since Ethernet have a fixed overhead of 26 bytes for each packet (we do not consider data padding), then B f Bc = If we use kcmp = 0.5 consider δ net = 2T DC (Time Data Cycle) (if we consider T DC = 125µs, δ net = 250µs ), σ = 10, then we obtain an horizon h = 24. simulation result expressed in terms of performace loss, due to the network in the loop, is: Case 1 (σ = 10, δ net = 2, k cmp = 0.5, h = 24) area error average radial rel. error maximum radial rel. error Conventional control PBC approach (Universitá di Pisa) December 17, / 23
34 Simulation results PBC approach: We assume to represent each control value on 8 bytes, since Ethernet have a fixed overhead of 26 bytes for each packet (we do not consider data padding), then B f Bc = If we use kcmp = 0.5 consider δ net = 2T DC (Time Data Cycle) (if we consider T DC = 125µs, δ net = 250µs ), σ = 10, then we obtain an horizon h = 24. simulation result expressed in terms of performace loss, due to the network in the loop, is: Case 1 (σ = 10, δ net = 2, k cmp = 0.5, h = 24) area error average radial rel. error maximum radial rel. error Conventional control PBC approach Case 2 (σ = 20, δ net = 5, k cmp = 0.5, h = 50) area error average radial rel. error maximum radial rel. error Conventional control PBC approach (Universitá di Pisa) December 17, / 23
35 conclusions conclusions problem of model-based approach to control a nonlinear system based on its approximate discrete-time model is not new. In particular, we referred mainly to the following works: Delay compensation in packet-switching networked controlled systems (Chaillet Bicchi), Exploiting packet size in uncertain nonlinear networked control systems (Greco, Chaillet, Bicchi). In particular, these works consider a static controller for state feedback whereas here a dynamic controller is considered. refore, the main aim of my work has been to show the practicality the applicability of the control approach even when considering a dynamic controller. In order to evaluate the performance of the proposed control strategy, the control algorithm has been implemented tested on a industrial case study. results obtained by means of simulations are very promising. In fact, they suggest the possibility of: exploiting the large size of packets consequently lowering the sending packet-rate using the available bwidth in a better way, while ensuring a certain quality of control lowering the requirements real-time of the communication, therefore extending the control to the green phase of PROFINET (Universitá di Pisa) December 17, / 23
36 : the proof of the stability of the control-loop by taking into account the network constraints, the dynamic controller, the model uncertainty to design a non-linear observer well-suited for packet-switching network development of a demonstration with a real mechanical system (Universitá di Pisa) December 17, / 23
Delay compensation in packet-switching network controlled systems
 Delay compensation in packet-switching network controlled systems Antoine Chaillet and Antonio Bicchi EECI - L2S - Université Paris Sud - Supélec (France) Centro di Ricerca Piaggio - Università di Pisa
Delay compensation in packet-switching network controlled systems Antoine Chaillet and Antonio Bicchi EECI - L2S - Université Paris Sud - Supélec (France) Centro di Ricerca Piaggio - Università di Pisa
STATE AND OUTPUT FEEDBACK CONTROL IN MODEL-BASED NETWORKED CONTROL SYSTEMS
 SAE AND OUPU FEEDBACK CONROL IN MODEL-BASED NEWORKED CONROL SYSEMS Luis A Montestruque, Panos J Antsalis Abstract In this paper the control of a continuous linear plant where the sensor is connected to
SAE AND OUPU FEEDBACK CONROL IN MODEL-BASED NEWORKED CONROL SYSEMS Luis A Montestruque, Panos J Antsalis Abstract In this paper the control of a continuous linear plant where the sensor is connected to
CDS 270-2: Lecture 6-1 Towards a Packet-based Control Theory
 Goals: CDS 270-2: Lecture 6-1 Towards a Packet-based Control Theory Ling Shi May 1 2006 - Describe main issues with a packet-based control system - Introduce common models for a packet-based control system
Goals: CDS 270-2: Lecture 6-1 Towards a Packet-based Control Theory Ling Shi May 1 2006 - Describe main issues with a packet-based control system - Introduce common models for a packet-based control system
MOST control systems are designed under the assumption
 2076 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 53, NO. 9, OCTOBER 2008 Lyapunov-Based Model Predictive Control of Nonlinear Systems Subject to Data Losses David Muñoz de la Peña and Panagiotis D. Christofides
2076 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 53, NO. 9, OCTOBER 2008 Lyapunov-Based Model Predictive Control of Nonlinear Systems Subject to Data Losses David Muñoz de la Peña and Panagiotis D. Christofides
System Model. Real-Time systems. Giuseppe Lipari. Scuola Superiore Sant Anna Pisa -Italy
 Real-Time systems System Model Giuseppe Lipari Scuola Superiore Sant Anna Pisa -Italy Corso di Sistemi in tempo reale Laurea Specialistica in Ingegneria dell Informazione Università di Pisa p. 1/?? Task
Real-Time systems System Model Giuseppe Lipari Scuola Superiore Sant Anna Pisa -Italy Corso di Sistemi in tempo reale Laurea Specialistica in Ingegneria dell Informazione Università di Pisa p. 1/?? Task
Communication constraints and latency in Networked Control Systems
 Communication constraints and latency in Networked Control Systems João P. Hespanha Center for Control Engineering and Computation University of California Santa Barbara In collaboration with Antonio Ortega
Communication constraints and latency in Networked Control Systems João P. Hespanha Center for Control Engineering and Computation University of California Santa Barbara In collaboration with Antonio Ortega
Delay compensation in packet-switching networked controlled systems
 Proceedings of the 47th IEEE Conference on Decision and Control Cancun, Mexico, Dec. 9-11, 2008 Delay compensation in packet-switching networked controlled systems Antoine Chaillet and Antonio Bicchi Abstract
Proceedings of the 47th IEEE Conference on Decision and Control Cancun, Mexico, Dec. 9-11, 2008 Delay compensation in packet-switching networked controlled systems Antoine Chaillet and Antonio Bicchi Abstract
Design of IP networks with Quality of Service
 Course of Multimedia Internet (Sub-course Reti Internet Multimediali ), AA 2010-2011 Prof. Pag. 1 Design of IP networks with Quality of Service 1 Course of Multimedia Internet (Sub-course Reti Internet
Course of Multimedia Internet (Sub-course Reti Internet Multimediali ), AA 2010-2011 Prof. Pag. 1 Design of IP networks with Quality of Service 1 Course of Multimedia Internet (Sub-course Reti Internet
Chapter 5 A Modified Scheduling Algorithm for The FIP Fieldbus System
 Chapter 5 A Modified Scheduling Algorithm for The FIP Fieldbus System As we stated before FIP is one of the fieldbus systems, these systems usually consist of many control loops that communicate and interact
Chapter 5 A Modified Scheduling Algorithm for The FIP Fieldbus System As we stated before FIP is one of the fieldbus systems, these systems usually consist of many control loops that communicate and interact
Feedback Control CONTROL THEORY FUNDAMENTALS. Feedback Control: A History. Feedback Control: A History (contd.) Anuradha Annaswamy
 Anuradha Annaswamy") Feedback Control CONTROL THEORY FUNDAMENTALS Actuator Sensor + Anuradha Annaswamy Active adaptive Control Laboratory Massachusetts Institute of Technology must follow with» Speed» Accuracy Feeback: Measure
Feedback Control CONTROL THEORY FUNDAMENTALS Actuator Sensor + Anuradha Annaswamy Active adaptive Control Laboratory Massachusetts Institute of Technology must follow with» Speed» Accuracy Feeback: Measure
Trajectory Planning, Setpoint Generation and Feedforward for Motion Systems
 2 Trajectory Planning, Setpoint Generation and Feedforward for Motion Systems Paul Lambrechts Digital Motion Control (4K4), 23 Faculty of Mechanical Engineering, Control Systems Technology Group /42 2
2 Trajectory Planning, Setpoint Generation and Feedforward for Motion Systems Paul Lambrechts Digital Motion Control (4K4), 23 Faculty of Mechanical Engineering, Control Systems Technology Group /42 2
FAULT-TOLERANT CONTROL OF CHEMICAL PROCESS SYSTEMS USING COMMUNICATION NETWORKS. Nael H. El-Farra, Adiwinata Gani & Panagiotis D.
 FAULT-TOLERANT CONTROL OF CHEMICAL PROCESS SYSTEMS USING COMMUNICATION NETWORKS Nael H. El-Farra, Adiwinata Gani & Panagiotis D. Christofides Department of Chemical Engineering University of California,
FAULT-TOLERANT CONTROL OF CHEMICAL PROCESS SYSTEMS USING COMMUNICATION NETWORKS Nael H. El-Farra, Adiwinata Gani & Panagiotis D. Christofides Department of Chemical Engineering University of California,
Networked Control Systems:
 Networked Control Systems: an emulation approach to controller design Dragan Nesic The University of Melbourne Electrical and Electronic Engineering Acknowledgements: My collaborators: A.R. Teel, M. Tabbara,
Networked Control Systems: an emulation approach to controller design Dragan Nesic The University of Melbourne Electrical and Electronic Engineering Acknowledgements: My collaborators: A.R. Teel, M. Tabbara,
CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER
 114 CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER 5.1 INTRODUCTION Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. It also refers
114 CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER 5.1 INTRODUCTION Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. It also refers
Synthesizing Asynchronous Burst-Mode Machines without the Fundamental-Mode Timing Assumption
 Synthesizing synchronous urst-mode Machines without the Fundamental-Mode Timing ssumption Gennette Gill Montek Singh Univ. of North Carolina Chapel Hill, NC, US Contribution Synthesize robust asynchronous
Synthesizing synchronous urst-mode Machines without the Fundamental-Mode Timing ssumption Gennette Gill Montek Singh Univ. of North Carolina Chapel Hill, NC, US Contribution Synthesize robust asynchronous
Networked Control Systems
 Networked Control Systems Simulation & Analysis J.J.C. van Schendel DCT 2008.119 Traineeship report March till June 2008 Coaches: Supervisor TU/e: Prof. Dr. D. Nesic, University of Melbourne Dr. M. Tabbara,
Networked Control Systems Simulation & Analysis J.J.C. van Schendel DCT 2008.119 Traineeship report March till June 2008 Coaches: Supervisor TU/e: Prof. Dr. D. Nesic, University of Melbourne Dr. M. Tabbara,
Subject: Optimal Control Assignment-1 (Related to Lecture notes 1-10)
") Subject: Optimal Control Assignment- (Related to Lecture notes -). Design a oil mug, shown in fig., to hold as much oil possible. The height and radius of the mug should not be more than 6cm. The mug must
Subject: Optimal Control Assignment- (Related to Lecture notes -). Design a oil mug, shown in fig., to hold as much oil possible. The height and radius of the mug should not be more than 6cm. The mug must
Towards control over fading channels
 Towards control over fading channels Paolo Minero, Massimo Franceschetti Advanced Network Science University of California San Diego, CA, USA mail: {minero,massimo}@ucsd.edu Invited Paper) Subhrakanti
Towards control over fading channels Paolo Minero, Massimo Franceschetti Advanced Network Science University of California San Diego, CA, USA mail: {minero,massimo}@ucsd.edu Invited Paper) Subhrakanti
MODELING OF NONLINEAR SYSTEM FOR A HYDRAULIC PROCESS
 U.P.B. Sci. Bull., Series C, Vol. 77, Iss., 015 ISSN 86-3540 MODELING OF NONLINEAR SYSTEM FOR A HYDRAULIC PROCESS Vasile CALOFIR 1 This paper deals with the model design of a nonlinear plant which consists
U.P.B. Sci. Bull., Series C, Vol. 77, Iss., 015 ISSN 86-3540 MODELING OF NONLINEAR SYSTEM FOR A HYDRAULIC PROCESS Vasile CALOFIR 1 This paper deals with the model design of a nonlinear plant which consists
Control over Communication Networks: Modeling, Analysis, and Synthesis. Marieke Posthumus-Cloosterman
 Control over Communication Networks: Modeling, Analysis, and Synthesis Marieke Posthumus-Cloosterman This work has been carried out as part of the Boderc project under the responsibility of the Embedded
Control over Communication Networks: Modeling, Analysis, and Synthesis Marieke Posthumus-Cloosterman This work has been carried out as part of the Boderc project under the responsibility of the Embedded
A Signal Processing Approach to the Analysis of Chemical Networking Protocols
 Laurea Specialistica 19 July 2010 A Signal Processing Approach to the Analysis of Chemical Networking Protocols Author Supervisors Prof. Marco Luise Prof. Filippo Giannetti (University of Pisa) (University
Laurea Specialistica 19 July 2010 A Signal Processing Approach to the Analysis of Chemical Networking Protocols Author Supervisors Prof. Marco Luise Prof. Filippo Giannetti (University of Pisa) (University
Control of industrial robots. Centralized control
 Control of industrial robots Centralized control Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano ipartimento di Elettronica, Informazione e Bioingegneria Introduction Centralized control
Control of industrial robots Centralized control Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano ipartimento di Elettronica, Informazione e Bioingegneria Introduction Centralized control
Efficient Nonlinear Optimizations of Queuing Systems
 Efficient Nonlinear Optimizations of Queuing Systems Mung Chiang, Arak Sutivong, and Stephen Boyd Electrical Engineering Department, Stanford University, CA 9435 Abstract We present a systematic treatment
Efficient Nonlinear Optimizations of Queuing Systems Mung Chiang, Arak Sutivong, and Stephen Boyd Electrical Engineering Department, Stanford University, CA 9435 Abstract We present a systematic treatment
Modeling and Control Overview
 Modeling and Control Overview D R. T A R E K A. T U T U N J I A D V A N C E D C O N T R O L S Y S T E M S M E C H A T R O N I C S E N G I N E E R I N G D E P A R T M E N T P H I L A D E L P H I A U N I
Modeling and Control Overview D R. T A R E K A. T U T U N J I A D V A N C E D C O N T R O L S Y S T E M S M E C H A T R O N I C S E N G I N E E R I N G D E P A R T M E N T P H I L A D E L P H I A U N I
Polarization division multiplexing system quality in the presence of polarization effects
 Opt Quant Electron (2009) 41:997 1006 DOI 10.1007/s11082-010-9412-0 Polarization division multiplexing system quality in the presence of polarization effects Krzysztof Perlicki Received: 6 January 2010
Opt Quant Electron (2009) 41:997 1006 DOI 10.1007/s11082-010-9412-0 Polarization division multiplexing system quality in the presence of polarization effects Krzysztof Perlicki Received: 6 January 2010
AQUANTIZER is a device that converts a real-valued
 830 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL 57, NO 4, APRIL 2012 Input to State Stabilizing Controller for Systems With Coarse Quantization Yoav Sharon, Member, IEEE, Daniel Liberzon, Senior Member,
830 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL 57, NO 4, APRIL 2012 Input to State Stabilizing Controller for Systems With Coarse Quantization Yoav Sharon, Member, IEEE, Daniel Liberzon, Senior Member,
Trajectory planning and feedforward design for electromechanical motion systems version 2
 2 Trajectory planning and feedforward design for electromechanical motion systems version 2 Report nr. DCT 2003-8 Paul Lambrechts Email: P.F.Lambrechts@tue.nl April, 2003 Abstract This report considers
2 Trajectory planning and feedforward design for electromechanical motion systems version 2 Report nr. DCT 2003-8 Paul Lambrechts Email: P.F.Lambrechts@tue.nl April, 2003 Abstract This report considers
NONLINEAR CONTROL with LIMITED INFORMATION. Daniel Liberzon
 NONLINEAR CONTROL with LIMITED INFORMATION Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign Plenary talk, 2 nd Indian Control
NONLINEAR CONTROL with LIMITED INFORMATION Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign Plenary talk, 2 nd Indian Control
Copyrighted Material. 1.1 Large-Scale Interconnected Dynamical Systems
 Chapter One Introduction 1.1 Large-Scale Interconnected Dynamical Systems Modern complex dynamical systems 1 are highly interconnected and mutually interdependent, both physically and through a multitude
Chapter One Introduction 1.1 Large-Scale Interconnected Dynamical Systems Modern complex dynamical systems 1 are highly interconnected and mutually interdependent, both physically and through a multitude
AN EVENT-TRIGGERED TRANSMISSION POLICY FOR NETWORKED L 2 -GAIN CONTROL
 4 Journal of Marine Science and echnology, Vol. 3, No., pp. 4-9 () DOI:.69/JMS-3-3-3 AN EVEN-RIGGERED RANSMISSION POLICY FOR NEWORKED L -GAIN CONROL Jenq-Lang Wu, Yuan-Chang Chang, Xin-Hong Chen, and su-ian
4 Journal of Marine Science and echnology, Vol. 3, No., pp. 4-9 () DOI:.69/JMS-3-3-3 AN EVEN-RIGGERED RANSMISSION POLICY FOR NEWORKED L -GAIN CONROL Jenq-Lang Wu, Yuan-Chang Chang, Xin-Hong Chen, and su-ian
QUANTIZED SYSTEMS AND CONTROL. Daniel Liberzon. DISC HS, June Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign
 QUANTIZED SYSTEMS AND CONTROL Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign DISC HS, June 2003 HYBRID CONTROL Plant: u y
QUANTIZED SYSTEMS AND CONTROL Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign DISC HS, June 2003 HYBRID CONTROL Plant: u y
Modeling and Analysis of Dynamic Systems
 Modeling and Analysis of Dynamic Systems by Dr. Guillaume Ducard Fall 2016 Institute for Dynamic Systems and Control ETH Zurich, Switzerland based on script from: Prof. Dr. Lino Guzzella 1/33 Outline 1
Modeling and Analysis of Dynamic Systems by Dr. Guillaume Ducard Fall 2016 Institute for Dynamic Systems and Control ETH Zurich, Switzerland based on script from: Prof. Dr. Lino Guzzella 1/33 Outline 1
Networked Control System Protocols Modeling & Analysis using Stochastic Impulsive Systems
 Networked Control System Protocols Modeling & Analysis using Stochastic Impulsive Systems João P. Hespanha Center for Control Dynamical Systems and Computation Talk outline Examples feedback over shared
Networked Control System Protocols Modeling & Analysis using Stochastic Impulsive Systems João P. Hespanha Center for Control Dynamical Systems and Computation Talk outline Examples feedback over shared
Model based optimization and estimation of the field map during the breakdown phase in the ITER tokamak
 Model based optimization and estimation of the field map during the breakdown phase in the ITER tokamak Roberto Ambrosino 1 Gianmaria De Tommasi 2 Massimiliano Mattei 3 Alfredo Pironti 2 1 CREATE, Università
Model based optimization and estimation of the field map during the breakdown phase in the ITER tokamak Roberto Ambrosino 1 Gianmaria De Tommasi 2 Massimiliano Mattei 3 Alfredo Pironti 2 1 CREATE, Università
Control of Chatter using Active Magnetic Bearings
 Control of Chatter using Active Magnetic Bearings Carl R. Knospe University of Virginia Opportunity Chatter is a machining process instability that inhibits higher metal removal rates (MRR) and accelerates
Control of Chatter using Active Magnetic Bearings Carl R. Knospe University of Virginia Opportunity Chatter is a machining process instability that inhibits higher metal removal rates (MRR) and accelerates
CHAPTER 4 STATE FEEDBACK AND OUTPUT FEEDBACK CONTROLLERS
 54 CHAPTER 4 STATE FEEDBACK AND OUTPUT FEEDBACK CONTROLLERS 4.1 INTRODUCTION In control theory, a controller is a device which monitors and affects the operational conditions of a given dynamic system.
54 CHAPTER 4 STATE FEEDBACK AND OUTPUT FEEDBACK CONTROLLERS 4.1 INTRODUCTION In control theory, a controller is a device which monitors and affects the operational conditions of a given dynamic system.
Chapter 2 Review of Linear and Nonlinear Controller Designs
 Chapter 2 Review of Linear and Nonlinear Controller Designs This Chapter reviews several flight controller designs for unmanned rotorcraft. 1 Flight control systems have been proposed and tested on a wide
Chapter 2 Review of Linear and Nonlinear Controller Designs This Chapter reviews several flight controller designs for unmanned rotorcraft. 1 Flight control systems have been proposed and tested on a wide
ISO INTERNATIONAL STANDARD. Test code for machine tools Part 4: Circular tests for numerically controlled machine tools
 INTERNATIONAL STANDARD ISO 230-4 Second edition 2005-04-01 Test code for machine tools Part 4: Circular tests for numerically controlled machine tools Code d'essai des machines-outils Partie 4: Essais
INTERNATIONAL STANDARD ISO 230-4 Second edition 2005-04-01 Test code for machine tools Part 4: Circular tests for numerically controlled machine tools Code d'essai des machines-outils Partie 4: Essais
Stability of networked control systems with variable sampling and delay
 Stability of networked control systems with variable sampling and delay Payam Naghshtabrizi and Joao P Hespanha Abstract We consider Networked Control Systems (NCSs) consisting of a LTI plant; a linear
Stability of networked control systems with variable sampling and delay Payam Naghshtabrizi and Joao P Hespanha Abstract We consider Networked Control Systems (NCSs) consisting of a LTI plant; a linear
Balancing of an Inverted Pendulum with a SCARA Robot
 Balancing of an Inverted Pendulum with a SCARA Robot Bernhard Sprenger, Ladislav Kucera, and Safer Mourad Swiss Federal Institute of Technology Zurich (ETHZ Institute of Robotics 89 Zurich, Switzerland
Balancing of an Inverted Pendulum with a SCARA Robot Bernhard Sprenger, Ladislav Kucera, and Safer Mourad Swiss Federal Institute of Technology Zurich (ETHZ Institute of Robotics 89 Zurich, Switzerland
Data Rate Theorem for Stabilization over Time-Varying Feedback Channels
 Data Rate Theorem for Stabilization over Time-Varying Feedback Channels Workshop on Frontiers in Distributed Communication, Sensing and Control Massimo Franceschetti, UCSD (joint work with P. Minero, S.
Data Rate Theorem for Stabilization over Time-Varying Feedback Channels Workshop on Frontiers in Distributed Communication, Sensing and Control Massimo Franceschetti, UCSD (joint work with P. Minero, S.
Control System Design
 ELEC ENG 4CL4: Control System Design Notes for Lecture #36 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Friday, April 4, 2003 3. Cascade Control Next we turn to an
ELEC ENG 4CL4: Control System Design Notes for Lecture #36 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Friday, April 4, 2003 3. Cascade Control Next we turn to an
Robust Stability and Disturbance Attenuation Analysis of a Class of Networked Control Systems
 Robust Stability and Disturbance Attenuation Analysis of a Class of etworked Control Systems Hai Lin Department of Electrical Engineering University of otre Dame otre Dame, I 46556, USA Guisheng Zhai Department
Robust Stability and Disturbance Attenuation Analysis of a Class of etworked Control Systems Hai Lin Department of Electrical Engineering University of otre Dame otre Dame, I 46556, USA Guisheng Zhai Department
NOWADAYS, many control applications have some control
 1650 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL 49, NO 10, OCTOBER 2004 Input Output Stability Properties of Networked Control Systems D Nešić, Senior Member, IEEE, A R Teel, Fellow, IEEE Abstract Results
1650 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL 49, NO 10, OCTOBER 2004 Input Output Stability Properties of Networked Control Systems D Nešić, Senior Member, IEEE, A R Teel, Fellow, IEEE Abstract Results
Passivity-Based Control of an Overhead Travelling Crane
 Proceedings of the 17th World Congress The International Federation of Automatic Control Passivity-Based Control of an Overhead Travelling Crane Harald Aschemann Chair of Mechatronics University of Rostock
Proceedings of the 17th World Congress The International Federation of Automatic Control Passivity-Based Control of an Overhead Travelling Crane Harald Aschemann Chair of Mechatronics University of Rostock
Infrared Tire Temperature Sensor, IRTS-V2 - Datasheet
 The Izze-Racing tire temperature sensor is specifically designed to measure the highly transient surface temperature of a tire with spatial fidelity, providing invaluable information for chassis tuning,
The Izze-Racing tire temperature sensor is specifically designed to measure the highly transient surface temperature of a tire with spatial fidelity, providing invaluable information for chassis tuning,
Immediate Detection of Predicates in Pervasive Environments
 Immediate Detection of redicates in ervasive Environments Ajay Kshemkalyani University of Illinois at Chicago November 30, 2010 A. Kshemkalyani (U Illinois at Chicago) Immediate Detection of redicates......
Immediate Detection of redicates in ervasive Environments Ajay Kshemkalyani University of Illinois at Chicago November 30, 2010 A. Kshemkalyani (U Illinois at Chicago) Immediate Detection of redicates......
Event-triggered control subject to actuator saturation
 Event-triggered control subject to actuator saturation GEORG A. KIENER Degree project in Automatic Control Master's thesis Stockholm, Sweden 212 XR-EE-RT 212:9 Diploma Thesis Event-triggered control subject
Event-triggered control subject to actuator saturation GEORG A. KIENER Degree project in Automatic Control Master's thesis Stockholm, Sweden 212 XR-EE-RT 212:9 Diploma Thesis Event-triggered control subject
PIQI-RCP: Design and Analysis of Rate-Based Explicit Congestion Control
 PIQI-RCP: Design and Analysis of Rate-Based Explicit Congestion Control Saurabh Jain Joint work with Dr. Dmitri Loguinov June 21, 2007 1 Agenda Introduction Analysis of RCP QI-RCP PIQI-RCP Comparison Wrap
PIQI-RCP: Design and Analysis of Rate-Based Explicit Congestion Control Saurabh Jain Joint work with Dr. Dmitri Loguinov June 21, 2007 1 Agenda Introduction Analysis of RCP QI-RCP PIQI-RCP Comparison Wrap
557. Radial correction controllers of gyroscopic stabilizer
 557. Radial correction controllers of gyroscopic stabilizer M. Sivčák 1, J. Škoda, Technical University in Liberec, Studentská, Liberec, Czech Republic e-mail: 1 michal.sivcak@tul.cz; jan.skoda@pevnosti.cz
557. Radial correction controllers of gyroscopic stabilizer M. Sivčák 1, J. Škoda, Technical University in Liberec, Studentská, Liberec, Czech Republic e-mail: 1 michal.sivcak@tul.cz; jan.skoda@pevnosti.cz
,
 Method of compensation of errors in measurement of roundness and cylindricity deviations caused by eccentric position of measured element in relation to the axis of rotation of FMM table Maciej Sieniło
Method of compensation of errors in measurement of roundness and cylindricity deviations caused by eccentric position of measured element in relation to the axis of rotation of FMM table Maciej Sieniło
Topic # Feedback Control. State-Space Systems Closed-loop control using estimators and regulators. Dynamics output feedback
 Topic #17 16.31 Feedback Control State-Space Systems Closed-loop control using estimators and regulators. Dynamics output feedback Back to reality Copyright 21 by Jonathan How. All Rights reserved 1 Fall
Topic #17 16.31 Feedback Control State-Space Systems Closed-loop control using estimators and regulators. Dynamics output feedback Back to reality Copyright 21 by Jonathan How. All Rights reserved 1 Fall
Lectures 25 & 26: Consensus and vehicular formation problems
 EE 8235: Lectures 25 & 26 Lectures 25 & 26: Consensus and vehicular formation problems Consensus Make subsystems (agents, nodes) reach agreement Distributed decision making Vehicular formations How does
EE 8235: Lectures 25 & 26 Lectures 25 & 26: Consensus and vehicular formation problems Consensus Make subsystems (agents, nodes) reach agreement Distributed decision making Vehicular formations How does
Stability of Nonlinear Control Systems Under Intermittent Information with Applications to Multi-Agent Robotics
 Introduction Stability Optimal Intermittent Fdbk Summary Stability of Nonlinear Control Systems Under Intermittent Information with Applications to Multi-Agent Robotics Domagoj Tolić Fakultet Elektrotehnike
Introduction Stability Optimal Intermittent Fdbk Summary Stability of Nonlinear Control Systems Under Intermittent Information with Applications to Multi-Agent Robotics Domagoj Tolić Fakultet Elektrotehnike
AC&ST AUTOMATIC CONTROL AND SYSTEM THEORY SYSTEMS AND MODELS. Claudio Melchiorri
 C. Melchiorri (DEI) Automatic Control & System Theory 1 AUTOMATIC CONTROL AND SYSTEM THEORY SYSTEMS AND MODELS Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI)
C. Melchiorri (DEI) Automatic Control & System Theory 1 AUTOMATIC CONTROL AND SYSTEM THEORY SYSTEMS AND MODELS Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI)
SHM-14 Ultra-Fast, 14-Bit Linear Monolithic Sample-Hold Amplifiers
 INNOVATION and EX C ELL E N C E Ultra-Fast, 1-Bit Linear Monolithic Sample-Hold Amplifiers FEATURES Fast acquisition time: 10ns to ±0.1% 0ns to ±0.0% ns to ±0.01% ±0.001% Nonlinearity 6µV rms output noise
INNOVATION and EX C ELL E N C E Ultra-Fast, 1-Bit Linear Monolithic Sample-Hold Amplifiers FEATURES Fast acquisition time: 10ns to ±0.1% 0ns to ±0.0% ns to ±0.01% ±0.001% Nonlinearity 6µV rms output noise
Design and Control of Variable Stiffness Actuation Systems
 Design and Control of Variable Stiffness Actuation Systems Gianluca Palli, Claudio Melchiorri, Giovanni Berselli and Gabriele Vassura DEIS - DIEM - Università di Bologna LAR - Laboratory of Automation
Design and Control of Variable Stiffness Actuation Systems Gianluca Palli, Claudio Melchiorri, Giovanni Berselli and Gabriele Vassura DEIS - DIEM - Università di Bologna LAR - Laboratory of Automation
Random Access Protocols for Massive MIMO
 Random Access Protocols for Massive MIMO Elisabeth de Carvalho Jesper H. Sørensen Petar Popovski Aalborg University Denmark Emil Björnson Erik G. Larsson Linköping University Sweden 2016 Tyrrhenian International
Random Access Protocols for Massive MIMO Elisabeth de Carvalho Jesper H. Sørensen Petar Popovski Aalborg University Denmark Emil Björnson Erik G. Larsson Linköping University Sweden 2016 Tyrrhenian International
Wireless Internet Exercises
 Wireless Internet Exercises Prof. Alessandro Redondi 2018-05-28 1 WLAN 1.1 Exercise 1 A Wi-Fi network has the following features: Physical layer transmission rate: 54 Mbps MAC layer header: 28 bytes MAC
Wireless Internet Exercises Prof. Alessandro Redondi 2018-05-28 1 WLAN 1.1 Exercise 1 A Wi-Fi network has the following features: Physical layer transmission rate: 54 Mbps MAC layer header: 28 bytes MAC
E8 TCP. Politecnico di Milano Scuola di Ingegneria Industriale e dell Informazione
 E8 TP Politecnico di Milano Scuola di Ingegneria Industriale e dell Informazione Exercises o onsider the connection in the figure A =80 kbit/s τ =0 ms R =? τ =? B o o o Host A wants to know the capacity
E8 TP Politecnico di Milano Scuola di Ingegneria Industriale e dell Informazione Exercises o onsider the connection in the figure A =80 kbit/s τ =0 ms R =? τ =? B o o o Host A wants to know the capacity
Chapter 3 AUTOMATIC VOLTAGE CONTROL
 Chapter 3 AUTOMATIC VOLTAGE CONTROL . INTRODUCTION TO EXCITATION SYSTEM The basic function of an excitation system is to provide direct current to the field winding of the synchronous generator. The excitation
Chapter 3 AUTOMATIC VOLTAGE CONTROL . INTRODUCTION TO EXCITATION SYSTEM The basic function of an excitation system is to provide direct current to the field winding of the synchronous generator. The excitation
EE C128 / ME C134 Feedback Control Systems
 EE C128 / ME C134 Feedback Control Systems Lecture Additional Material Introduction to Model Predictive Control Maximilian Balandat Department of Electrical Engineering & Computer Science University of
EE C128 / ME C134 Feedback Control Systems Lecture Additional Material Introduction to Model Predictive Control Maximilian Balandat Department of Electrical Engineering & Computer Science University of
Complexity Metrics. ICRAT Tutorial on Airborne self separation in air transportation Budapest, Hungary June 1, 2010.
 Complexity Metrics ICRAT Tutorial on Airborne self separation in air transportation Budapest, Hungary June 1, 2010 Outline Introduction and motivation The notion of air traffic complexity Relevant characteristics
Complexity Metrics ICRAT Tutorial on Airborne self separation in air transportation Budapest, Hungary June 1, 2010 Outline Introduction and motivation The notion of air traffic complexity Relevant characteristics
Real-Time Scheduling and Resource Management
 ARTIST2 Summer School 2008 in Europe Autrans (near Grenoble), France September 8-12, 2008 Real-Time Scheduling and Resource Management Lecturer: Giorgio Buttazzo Full Professor Scuola Superiore Sant Anna
ARTIST2 Summer School 2008 in Europe Autrans (near Grenoble), France September 8-12, 2008 Real-Time Scheduling and Resource Management Lecturer: Giorgio Buttazzo Full Professor Scuola Superiore Sant Anna
FPGA BASED DESIGN OF PARALLEL CRC GENERATION FOR HIGH SPEED APPLICATION
 258 FPGA BASED DESIGN OF PARALLEL CRC GENERATION FOR HIGH SPEED APPLICATION Sri N.V.N.Prasanna Kumar 1, S.Bhagya Jyothi 2,G.K.S.Tejaswi 3 1 prasannakumar429@gmail.com, 2 sjyothi567@gmail.com, 3 tejaswikakatiya@gmail.com
258 FPGA BASED DESIGN OF PARALLEL CRC GENERATION FOR HIGH SPEED APPLICATION Sri N.V.N.Prasanna Kumar 1, S.Bhagya Jyothi 2,G.K.S.Tejaswi 3 1 prasannakumar429@gmail.com, 2 sjyothi567@gmail.com, 3 tejaswikakatiya@gmail.com
Event-based control of input-output linearizable systems
 Milano (Italy) August 28 - September 2, 2 Event-based control of input-output linearizable systems Christian Stöcker Jan Lunze Institute of Automation and Computer Control, Ruhr-Universität Bochum, Universitätsstr.
Milano (Italy) August 28 - September 2, 2 Event-based control of input-output linearizable systems Christian Stöcker Jan Lunze Institute of Automation and Computer Control, Ruhr-Universität Bochum, Universitätsstr.
Channel Allocation Using Pricing in Satellite Networks
 Channel Allocation Using Pricing in Satellite Networks Jun Sun and Eytan Modiano Laboratory for Information and Decision Systems Massachusetts Institute of Technology {junsun, modiano}@mitedu Abstract
Channel Allocation Using Pricing in Satellite Networks Jun Sun and Eytan Modiano Laboratory for Information and Decision Systems Massachusetts Institute of Technology {junsun, modiano}@mitedu Abstract
ME 132, Dynamic Systems and Feedback. Class Notes. Spring Instructor: Prof. A Packard
 ME 132, Dynamic Systems and Feedback Class Notes by Andrew Packard, Kameshwar Poolla & Roberto Horowitz Spring 2005 Instructor: Prof. A Packard Department of Mechanical Engineering University of California
ME 132, Dynamic Systems and Feedback Class Notes by Andrew Packard, Kameshwar Poolla & Roberto Horowitz Spring 2005 Instructor: Prof. A Packard Department of Mechanical Engineering University of California
Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL VOL. 56 NO. 3 MARCH 2011 655 Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays Nikolaos Bekiaris-Liberis Miroslav Krstic In this case system
IEEE TRANSACTIONS ON AUTOMATIC CONTROL VOL. 56 NO. 3 MARCH 2011 655 Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays Nikolaos Bekiaris-Liberis Miroslav Krstic In this case system
CDS 101/110a: Lecture 10-1 Robust Performance
 CDS 11/11a: Lecture 1-1 Robust Performance Richard M. Murray 1 December 28 Goals: Describe how to represent uncertainty in process dynamics Describe how to analyze a system in the presence of uncertainty
CDS 11/11a: Lecture 1-1 Robust Performance Richard M. Murray 1 December 28 Goals: Describe how to represent uncertainty in process dynamics Describe how to analyze a system in the presence of uncertainty
CM 3310 Process Control, Spring Lecture 21
 CM 331 Process Control, Spring 217 Instructor: Dr. om Co Lecture 21 (Back to Process Control opics ) General Control Configurations and Schemes. a) Basic Single-Input/Single-Output (SISO) Feedback Figure
CM 331 Process Control, Spring 217 Instructor: Dr. om Co Lecture 21 (Back to Process Control opics ) General Control Configurations and Schemes. a) Basic Single-Input/Single-Output (SISO) Feedback Figure
Event-Triggered Decentralized Dynamic Output Feedback Control for LTI Systems
 Event-Triggered Decentralized Dynamic Output Feedback Control for LTI Systems Pavankumar Tallapragada Nikhil Chopra Department of Mechanical Engineering, University of Maryland, College Park, 2742 MD,
Event-Triggered Decentralized Dynamic Output Feedback Control for LTI Systems Pavankumar Tallapragada Nikhil Chopra Department of Mechanical Engineering, University of Maryland, College Park, 2742 MD,
The PVTOL Aircraft. 2.1 Introduction
 2 The PVTOL Aircraft 2.1 Introduction We introduce in this chapter the well-known Planar Vertical Take-Off and Landing (PVTOL) aircraft problem. The PVTOL represents a challenging nonlinear systems control
2 The PVTOL Aircraft 2.1 Introduction We introduce in this chapter the well-known Planar Vertical Take-Off and Landing (PVTOL) aircraft problem. The PVTOL represents a challenging nonlinear systems control
A Robust Event-Triggered Consensus Strategy for Linear Multi-Agent Systems with Uncertain Network Topology
 A Robust Event-Triggered Consensus Strategy for Linear Multi-Agent Systems with Uncertain Network Topology Amir Amini, Amir Asif, Arash Mohammadi Electrical and Computer Engineering,, Montreal, Canada.
A Robust Event-Triggered Consensus Strategy for Linear Multi-Agent Systems with Uncertain Network Topology Amir Amini, Amir Asif, Arash Mohammadi Electrical and Computer Engineering,, Montreal, Canada.
Novel DTC-SVM for an Adjustable Speed Sensorless Induction Motor Drive
 Novel DTC-SVM for an Adjustable Speed Sensorless Induction Motor Drive Nazeer Ahammad S1, Sadik Ahamad Khan2, Ravi Kumar Reddy P3, Prasanthi M4 1*Pursuing M.Tech in the field of Power Electronics 2*Working
Novel DTC-SVM for an Adjustable Speed Sensorless Induction Motor Drive Nazeer Ahammad S1, Sadik Ahamad Khan2, Ravi Kumar Reddy P3, Prasanthi M4 1*Pursuing M.Tech in the field of Power Electronics 2*Working
This article appeared in a journal published by Elsevier. The attached copy is furnished to the author for internal non-commercial research and
 This article appeared in a journal published by Elsevier. The attached copy is furnished to the author for internal non-commercial research and education use, including for instruction at the authors institution
This article appeared in a journal published by Elsevier. The attached copy is furnished to the author for internal non-commercial research and education use, including for instruction at the authors institution
CONTROL OF DIGITAL SYSTEMS
 AUTOMATIC CONTROL AND SYSTEM THEORY CONTROL OF DIGITAL SYSTEMS Gianluca Palli Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna Email: gianluca.palli@unibo.it
AUTOMATIC CONTROL AND SYSTEM THEORY CONTROL OF DIGITAL SYSTEMS Gianluca Palli Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna Email: gianluca.palli@unibo.it
Motion Control. Laboratory assignment. Case study. Lectures. compliance, backlash and nonlinear friction. control strategies to improve performance
 436-459 Advanced Control and Automation Motion Control Lectures traditional CNC control architecture modelling of components dynamic response of axes effects on contouring performance control strategies
436-459 Advanced Control and Automation Motion Control Lectures traditional CNC control architecture modelling of components dynamic response of axes effects on contouring performance control strategies
Modeling and Robust Stability of Advanced, Distributed Control Systems DISSERTATION
 Modeling and Robust Stability of Advanced, Distributed Control Systems DISSERTATION Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The
Modeling and Robust Stability of Advanced, Distributed Control Systems DISSERTATION Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The
A REACHABLE THROUGHPUT UPPER BOUND FOR LIVE AND SAFE FREE CHOICE NETS VIA T-INVARIANTS
 A REACHABLE THROUGHPUT UPPER BOUND FOR LIVE AND SAFE FREE CHOICE NETS VIA T-INVARIANTS Francesco Basile, Ciro Carbone, Pasquale Chiacchio Dipartimento di Ingegneria Elettrica e dell Informazione, Università
A REACHABLE THROUGHPUT UPPER BOUND FOR LIVE AND SAFE FREE CHOICE NETS VIA T-INVARIANTS Francesco Basile, Ciro Carbone, Pasquale Chiacchio Dipartimento di Ingegneria Elettrica e dell Informazione, Università
Event-Triggered Output Feedback Control for Networked Control Systems using Passivity: Time-varying Network Induced Delays
 5th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC) Orlando, FL, USA, December -5, Event-Triggered Output Feedback Control for Networked Control Systems using Passivity:
5th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC) Orlando, FL, USA, December -5, Event-Triggered Output Feedback Control for Networked Control Systems using Passivity:
Models for representing sequential circuits
 Sequential Circuits Models for representing sequential circuits Finite-state machines (Moore and Mealy) Representation of memory (states) Changes in state (transitions) Design procedure State diagrams
Sequential Circuits Models for representing sequential circuits Finite-state machines (Moore and Mealy) Representation of memory (states) Changes in state (transitions) Design procedure State diagrams
Packetized Predictive Control over Erasure Channels
 Proceedings of the 2007 American Control Conference Marriott Marquis Hotel at Times Square New York City, USA, July 11-13, 2007 WeB09.2 Packetized Predictive Control over Erasure Channels Daniel E. Quevedo,
Proceedings of the 2007 American Control Conference Marriott Marquis Hotel at Times Square New York City, USA, July 11-13, 2007 WeB09.2 Packetized Predictive Control over Erasure Channels Daniel E. Quevedo,
Control Systems I. Lecture 2: Modeling. Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch Emilio Frazzoli
 Control Systems I Lecture 2: Modeling Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch. 2-3 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 29, 2017 E. Frazzoli
Control Systems I Lecture 2: Modeling Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch. 2-3 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 29, 2017 E. Frazzoli
Effects of time quantization and noise in level crossing sampling stabilization
 Effects of time quantization and noise in level crossing sampling stabilization Julio H. Braslavsky Ernesto Kofman Flavia Felicioni ARC Centre for Complex Dynamic Systems and Control The University of
Effects of time quantization and noise in level crossing sampling stabilization Julio H. Braslavsky Ernesto Kofman Flavia Felicioni ARC Centre for Complex Dynamic Systems and Control The University of
A RECEDING HORIZON CONTROL FOR LIFTING PING-PONG BALL. Sumiko Majima and Keii Chou
 A RECEDING HORIZON CONROL FOR LIFING PING-PONG BALL Sumiko Majima and Keii Chou Graduate School of Systems and Information Engineering, University of sukuba, sukuba, Ibaraki, Japan Abstract: his paper
A RECEDING HORIZON CONROL FOR LIFING PING-PONG BALL Sumiko Majima and Keii Chou Graduate School of Systems and Information Engineering, University of sukuba, sukuba, Ibaraki, Japan Abstract: his paper
UNIVERSITY OF CALIFORNIA. Los Angeles. Distributed Model Predictive Control of Nonlinear. and Two-Time-Scale Process Networks
 UNIVERSITY OF CALIFORNIA Los Angeles Distributed Model Predictive Control of Nonlinear and Two-Time-Scale Process Networks A dissertation submitted in partial satisfaction of the requirements for the degree
UNIVERSITY OF CALIFORNIA Los Angeles Distributed Model Predictive Control of Nonlinear and Two-Time-Scale Process Networks A dissertation submitted in partial satisfaction of the requirements for the degree
Topic # Feedback Control Systems
 Topic #19 16.31 Feedback Control Systems Stengel Chapter 6 Question: how well do the large gain and phase margins discussed for LQR map over to DOFB using LQR and LQE (called LQG)? Fall 2010 16.30/31 19
Topic #19 16.31 Feedback Control Systems Stengel Chapter 6 Question: how well do the large gain and phase margins discussed for LQR map over to DOFB using LQR and LQE (called LQG)? Fall 2010 16.30/31 19
Chapter 9 Robust Stability in SISO Systems 9. Introduction There are many reasons to use feedback control. As we have seen earlier, with the help of a
 Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A. Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter 9 Robust
Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A. Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter 9 Robust
arxiv: v2 [math.oc] 29 Aug 2012
![arxiv: v2 [math.oc] 29 Aug 2012](/thumbs/88/116215985.jpg "arxiv: v2 [math.oc] 29 Aug 2012") Ensuring Stability in Networked Systems with Nonlinear MPC for Continuous Time Systems Lars Grüne 1, Jürgen Pannek 2, and Karl Worthmann 1 arxiv:123.6785v2 [math.oc] 29 Aug 212 Abstract For networked systems,
Ensuring Stability in Networked Systems with Nonlinear MPC for Continuous Time Systems Lars Grüne 1, Jürgen Pannek 2, and Karl Worthmann 1 arxiv:123.6785v2 [math.oc] 29 Aug 212 Abstract For networked systems,
QSR-Dissipativity and Passivity Analysis of Event-Triggered Networked Control Cyber-Physical Systems
 QSR-Dissipativity and Passivity Analysis of Event-Triggered Networked Control Cyber-Physical Systems arxiv:1607.00553v1 [math.oc] 2 Jul 2016 Technical Report of the ISIS Group at the University of Notre
QSR-Dissipativity and Passivity Analysis of Event-Triggered Networked Control Cyber-Physical Systems arxiv:1607.00553v1 [math.oc] 2 Jul 2016 Technical Report of the ISIS Group at the University of Notre
Nonlinear Control of Electrodynamic Tether in Equatorial or Somewhat Inclined Orbits
 Proceedings of the 15th Mediterranean Conference on Control & Automation, July 7-9, 7, Athens - Greece T-5 Nonlinear Control of Electrodynamic Tether in Equatorial or Somewhat Inclined Martin B. Larsen
Proceedings of the 15th Mediterranean Conference on Control & Automation, July 7-9, 7, Athens - Greece T-5 Nonlinear Control of Electrodynamic Tether in Equatorial or Somewhat Inclined Martin B. Larsen
Automatic Control 2. Loop shaping. Prof. Alberto Bemporad. University of Trento. Academic year
 Automatic Control 2 Loop shaping Prof. Alberto Bemporad University of Trento Academic year 21-211 Prof. Alberto Bemporad (University of Trento) Automatic Control 2 Academic year 21-211 1 / 39 Feedback
Automatic Control 2 Loop shaping Prof. Alberto Bemporad University of Trento Academic year 21-211 Prof. Alberto Bemporad (University of Trento) Automatic Control 2 Academic year 21-211 1 / 39 Feedback
COMPARISON OF TWO METHODS TO SOLVE PRESSURES IN SMALL VOLUMES IN REAL-TIME SIMULATION OF A MOBILE DIRECTIONAL CONTROL VALVE
 COMPARISON OF TWO METHODS TO SOLVE PRESSURES IN SMALL VOLUMES IN REAL-TIME SIMULATION OF A MOBILE DIRECTIONAL CONTROL VALVE Rafael ÅMAN*, Heikki HANDROOS*, Pasi KORKEALAAKSO** and Asko ROUVINEN** * Laboratory
COMPARISON OF TWO METHODS TO SOLVE PRESSURES IN SMALL VOLUMES IN REAL-TIME SIMULATION OF A MOBILE DIRECTIONAL CONTROL VALVE Rafael ÅMAN*, Heikki HANDROOS*, Pasi KORKEALAAKSO** and Asko ROUVINEN** * Laboratory
Internal Model Control of A Class of Continuous Linear Underactuated Systems
 Internal Model Control of A Class of Continuous Linear Underactuated Systems Asma Mezzi Tunis El Manar University, Automatic Control Research Laboratory, LA.R.A, National Engineering School of Tunis (ENIT),
Internal Model Control of A Class of Continuous Linear Underactuated Systems Asma Mezzi Tunis El Manar University, Automatic Control Research Laboratory, LA.R.A, National Engineering School of Tunis (ENIT),
AN AUTOMATED GONIOPHOTOMETER FOR LUMINAIRE CHARACTERIZATION
 Copyright 2002 IFAC 15th Triennial World Congress, Barcelona, Spain AN AUTOMATED GONIOPHOTOMETER FOR LUMINAIRE CHARACTERIZATION V. F. Muñoz, J. Gómez-de-Gabriel, J. Fernández-Lozano, R. Molina-Mesa, J.
Copyright 2002 IFAC 15th Triennial World Congress, Barcelona, Spain AN AUTOMATED GONIOPHOTOMETER FOR LUMINAIRE CHARACTERIZATION V. F. Muñoz, J. Gómez-de-Gabriel, J. Fernández-Lozano, R. Molina-Mesa, J.
An improved deadbeat predictive current control for permanent magnet linear synchronous motor
 Indian Journal of Engineering & Materials Sciences Vol. 22, June 2015, pp. 273-282 An improved deadbeat predictive current control for permanent magnet linear synchronous motor Mingyi Wang, iyi i, Donghua
Indian Journal of Engineering & Materials Sciences Vol. 22, June 2015, pp. 273-282 An improved deadbeat predictive current control for permanent magnet linear synchronous motor Mingyi Wang, iyi i, Donghua
Problems in Magnetostatics
 Problems in Magnetostatics 8th February 27 Some of the later problems are quite challenging. This is characteristic of problems in magnetism. There are trivial problems and there are tough problems. Very
Problems in Magnetostatics 8th February 27 Some of the later problems are quite challenging. This is characteristic of problems in magnetism. There are trivial problems and there are tough problems. Very
Christian Mohr
 Christian Mohr 20.12.2011 Recurrent Networks Networks in which units may have connections to units in the same or preceding layers Also connections to the unit itself possible Already covered: Hopfield
Christian Mohr 20.12.2011 Recurrent Networks Networks in which units may have connections to units in the same or preceding layers Also connections to the unit itself possible Already covered: Hopfield
Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam!
 To be returned at the end of the exam!") Prüfung Regelungstechnik I (Control Systems I) Prof. Dr. Lino Guzzella 3. 8. 24 Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam! Do not mark up this translation aid
Prüfung Regelungstechnik I (Control Systems I) Prof. Dr. Lino Guzzella 3. 8. 24 Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam! Do not mark up this translation aid