Detection of Anomalies in Texture Images using Multi-Resolution Features
|
|
|
- Morgan Park
- 6 years ago
- Views:
Transcription
1 Detection of Anomalies in Texture Images using Multi-Resolution Features Electrical Engineering Department Supervisor: Prof. Israel Cohen
2 Outline Introduction 1 Introduction Anomaly Detection Texture Segmentation and Classification 2 Anomaly Detection Using MR Gaussian Textural Features Anomaly Subspace Detection Using MR Textural Features 3 Performance Analysis Anomaly Detection Examples 4
3 Motivation Introduction Anomaly Detection Texture Segmentation and Classification Objective Locating elements in a scene which are unlikely to be a part of it Main Challenges Large variability of the scene s background clutter Appearance of anomalous elements
4 Motivation Introduction Anomaly Detection Texture Segmentation and Classification Objective Locating elements in a scene which are unlikely to be a part of it Main Challenges Large variability of the scene s background clutter Appearance of anomalous elements
5 Feature Space Introduction Anomaly Detection Texture Segmentation and Classification The detection process is generally performed with respect to an appropriate feature space in which a clear segregation between the anomalous elements and the rest of the background clutter in the scene is possible The feature space is derived using Single resolution spatial analysis Multi-resolution analysis (hyper-spectral images, multi-resolution decompositions) Integration of both The Simultaneous Auto-Regressive (SAR) and Gaussian Markov Random Field (GMRF) are common used Random Field Models (RFM) for spatial analysis
6 Detection Methods Introduction Anomaly Detection Texture Segmentation and Classification Anomaly detectors often use Bayesian classifiers, utilizing available a-priori knowledge and a-posteriori parametric statistics of both background clutter and anomalous targets Common classifiers are: Single Hypothesis Testing (SHT) Matched Signal Detector Matched Subspace Detector (MSD)


7 Recent Work Introduction Anomaly Detection Texture Segmentation and Classification (Kwon et.al. 2003) Anomaly detection algorithm for hyper-spectral imagery based on the Eigen Separation Transform, performed using the covariance difference of statistics which are derived from a sliding dual window Additive anomalies will not be detected. Sample covariance estimation is performed using a small set of data and therefor is not accurate. Spatial correlation within each hyper-spectral image is disregarded.
8 Anomaly Detection Texture Segmentation and Classification Recent Work (continued) (Bello 1992, Hazel 2000) Anomaly detection algorithms for detecting regions which appear unlikely with respect to a SAR / GMRF model of the background image The use of a single resolution spatial analysis introduces high false alarms in semi-homogenous background textures due to deviations from the random field model
9 Anomaly Detection Texture Segmentation and Classification Recent Work (continued) (Schweizer and Moura 2001) Anomaly detection algorithm for detecting regions which appear unlikely in hyper-spectral images with respect to a GMRF model with a first order 3-D field, derived using small homogenous windows of the clutter (Goldman and Cohen 2005) Anomaly detection algorithm for detecting regions which appear unlikely with respect to a multi-resolution GMRF model of the background image, using a MSD classifier
10 Anomaly Detection Texture Segmentation and Classification Recent Work (continued) (Chellappa and Kashyap 1982,1983,1985) The quality of an image which is synthesized from its SAR or GMRF models varies considerably depending on the use of appropriate neighbor set (Manolakis and Shaw 2002) The theoretical detection performance of a MSD is highly affected by two main parameters: target subspace dimensionality and SNR Inappropriate choice of a neighbor set increases the prediction error due to SNR degradation, resulting in higher false alarms Non-linearities can be used to increase the SNR in order to achieve improved detection performance



11 Anomaly Detection Texture Segmentation and Classification Anomaly Detection in Synthesized Images Genuine background texture with additive synthesized anomaly Texture with Proposed Goldman and Cohen Proposed additive anomaly MSD Scheme (2005) SHT Scheme
12 Motivation Introduction Anomaly Detection Texture Segmentation and Classification Objective Main Challenges Segmentation of a given scene into different textures using a texture classification scheme Images of the same underlying texture can vary significantly Textural features must be invariant to image variations and at the same time sensitive to intrinsic spatial structures that define textures The distance measure between textures must be robust to the image variations in order to avoid classification errors Separation contours - spatial continuity must be preserved
13 Motivation Introduction Anomaly Detection Texture Segmentation and Classification Objective Main Challenges Segmentation of a given scene into different textures using a texture classification scheme Images of the same underlying texture can vary significantly Textural features must be invariant to image variations and at the same time sensitive to intrinsic spatial structures that define textures The distance measure between textures must be robust to the image variations in order to avoid classification errors Separation contours - spatial continuity must be preserved
14 Recent Work Introduction Anomaly Detection Texture Segmentation and Classification (Clausi and Yue 2004) Unsupervised texture segmentation algorithm using a single-resolution GMRF employed directly on the image (Mittelman and Porat 2005) Unsupervised texture segmentation algorithm using a multi-resolution GMRF employed on the logarithm of the the Gaussian Scale Mixture (GSM) hidden multipliers estimates Texture classification algorithm using the GSM hidden multipliers estimates (a non-parametric statistical model based on histogram derived dissimilarity measure)




15 Can it be used for Anomaly Detection? Anomaly Detection Texture Segmentation and Classification Texture Segmentation Unsupervised texture segmentation schemes perform poorly when used for detecting anomalous targets in a single texture However, these schemes can be used for segmenting a given scene to several textures prior to anomaly detection in each texture Texture Classification Possibly, but in a supervised scheme
 r R 2 R 2 j (s+r) ) Feature Space Statistics (Background Textural Signature): ˆµ 0 E [v(s)] ˆΣ 0 E [(v(s) ˆµ 0 )(v(s) ˆµ 0 ) T] Decision Rule (SHT): d(s) = (v(s) µ 0 ) T Σ 1 0 (v(s) µ 0 )")
16 Proposed Algorithm Introduction Anomaly Detection Using MR Gaussian Textural Features Anomaly Subspace Detection Using MR Textural Features Feature Space: t j (s) = log v j (s) = ( È r R 1 y 2 R 1 È t j(s+r) r R 2 R 2 j (s+r) ) Feature Space Statistics (Background Textural Signature): ˆµ 0 E [v(s)] ˆΣ 0 E [(v(s) ˆµ 0 )(v(s) ˆµ 0 ) T] Decision Rule (SHT): d(s) = (v(s) µ 0 ) T Σ 1 0 (v(s) µ 0 ) d(s) H1 η H 0
17 Anomaly Detection Using MR Gaussian Textural Features Anomaly Subspace Detection Using MR Textural Features Proposed Algorithm (continued) (Portilla et.al. 2001, Mittelman and Porat 2005) The logarithm of the GSM hidden multipliers estimates of wavelet coefficients has a Gaussian marginal distribution The feature space of the background clutter follows the multivariate Gaussian distribution, therefor: d(s) H0 χ 2 m (0) P FA = 1 P ( χ 2 m (0) η) A special case is when under hypothesis H 1 the observations are assumed to be a linear combination of the target signature and the background clutter, resulting in the RX algorithm (Reed and Yu 1990) : d(s) H1 χ 2 m ((µ 1 µ 0 ) T Σ 1 0 (µ 1 µ 0 )) ( ( ) P D = 1 P χ 2 m (µ 1 µ 0 ) T Σ 1 0 (µ 1 µ 0 ) ) η
18 Anomaly Detection Using MR Gaussian Textural Features Anomaly Subspace Detection Using MR Textural Features Proposed Algorithm (continued) Avoiding Miss-Detection of Scaled Background Textures Textural signature of a scaled background texture contains an additive bias for all multi-resolution layers Bias normalization is required in order to avoid miss-detection Revised Normalized Feature Space: q j (s) = v j (s) + ([µ 0 ] 1 v 1 (s)) q(s) = [q 2 (s),...,q m (s)] T ˆµ 0, ˆΣ 0 Decision Rule (SHT): d(s) = (q(s) µ 0 ) T Σ 1 0 (q(s) µ 0 )
19 Main Features Introduction Anomaly Detection Using MR Gaussian Textural Features Anomaly Subspace Detection Using MR Textural Features Detection is based on deviation from a Textural Signature which represents the unique spatial structure of the background texture Unsupervised (assuming rare targets) Constant False Alarm Rate (CFAR) regardless of the background clutter and anomaly type Does not rely on the exhaustive statistical model of the targets, but rather on the multi-resolution statistics of the background clutter different types of targets can be detected Can incorporate a-priori information on the minimal expected size of the targets for achieving improved detection results

20 Anomaly Detection Using MR Gaussian Textural Features Anomaly Subspace Detection Using MR Textural Features Classification Scheme - Proposed Algorithm Classification is based on the calculated Mahalanobis distance from pre-trained Textural Signatures

21 Proposed Algorithm Introduction Anomaly Detection Using MR Gaussian Textural Features Anomaly Subspace Detection Using MR Textural Features
22 Texture Modeling using a RFM Anomaly Detection Using MR Gaussian Textural Features Anomaly Subspace Detection Using MR Textural Features Each pixel in a given image is represented as a weighted sum of pixels at nearby locations and an additive prediction error, often referred as the innovations process y(s) = θ(r)y(s + r) + ε(s) B(θ)y = ε θ LS = r R [ s Ω 0 w(s)w(s) T w(s) = col [y(s + r),r R] ] 1 [ s Ω 0 y(s)w(s) ] The estimated weight coefficients are not affected by the scaling of the image
23 Anomaly Detection Using MR Gaussian Textural Features Anomaly Subspace Detection Using MR Textural Features Texture Modeling using a RFM (continued) The covariance of innovations which are derived from natural textures or from natural textures wavelet coefficients does not necessarily follow the SAR or the GMRF models This is mainly the result of inappropriate choice of neighborhood to be used with a given image Taking into consideration introduced correlation between pixels which are not accounted for in the GMRF model moderates the need for a proper choice of neighborhood for each background texture
24 Anomaly Detection Using MR Gaussian Textural Features Anomaly Subspace Detection Using MR Textural Features Texture Modeling using a RFM (continued) The squaring non-linearity achieves a random field model with lower prediction error variance whenever a proper scaling of the modeled image is performed y = δx ε y = B(θ x )y = δb(θ x )x = δε x [z y ] i = [y] 2 i E [ ] [y] 2 i = δ 2 [z x ] i ε zy = B(θ zx )z y = δ 2 B(θ zx )z x = δ 2 ε zx [ cov[εzy ] ] i,i [cov[ε y ]] i,i δ [cov[εx ]] i,i [cov[ε zx ]] i,i
25 Multi-Resolution Feature Space Anomaly Detection Using MR Gaussian Textural Features Anomaly Subspace Detection Using MR Textural Features RDWT y(v,s) = [y 1 (v,s), y 2 (v,s),..., y m (v,s)] T KLT t(v,s) = K T y(v,s) = [t 1 (v,s), t 2 (v,s),..., t p (v,s)] T, 1 p m Squaring z(v,s) = [z 1 (v,s), z 2 (v,s),..., z p (v,s)] T, z k (v,s) = t 2 k (v,s), k = 1,..., p RFM n k (v) = B(θ k )z k (v) µ zk ( 1 r Rθ k (r) ) Feature Space γ k (v) = Λ 1/2 k n k (v), Λ k E [ n k (v)n k (v) T]
26 Matched Subspace Detector Anomaly Detection Using MR Gaussian Textural Features Anomaly Subspace Detection Using MR Textural Features H 0 : γ k (v) = A k φ k (v) + ε k (v), H 1 : γ k (v) = B k ψ k (v) + A k φ k (v) + ε k (v) As a result of the introduced squaring non-linearity: The interfering subspace A k should account for the interfering signals, the interaction among them and the interaction between them and the background clutter The dimensionality of the target subspace B k highly affects the detector performance the interaction among target signals, the interaction between them and the background clutter and the interaction between them and the interfering signals are discarded
27 Anomaly Detection Using MR Gaussian Textural Features Anomaly Subspace Detection Using MR Textural Features Matched Subspace Detector (continued) The Generalized Likelihood Ratio Test (GLRT) is given by: L(v) = p k=1 γ k (v) T (P Ak B k P Ak )γ k (v) H1 H 0 η χ 2 q (0) (, under H 0 p ) L(v) χ 2 q [B k ψ k (v)] T (I P Ak )[B k ψ k (v)], under H 1 k=1 The theoretical detection rate and false alarm are given by: P D (v) = 1 P ( χ 2 q ( p ) ) SNR(k, v) η k=1 P FA (v) = 1 P(χ 2 q (0) η)
28 Main Features Introduction Anomaly Detection Using MR Gaussian Textural Features Anomaly Subspace Detection Using MR Textural Features Unsupervised (assuming rare targets) - requires only a-priori information on the target and interference characterizing subspaces Based on a multi-resolution RFM which better describes the background clutter in natural images than other models such as the SAR and the GMRF, resulting in enhanced segregation Can incorporate a-priori information on multi-resolution layers which are most significant to the detection process for achieving improved detection results Can be formulated to be used in a Subspace Detector Bank scheme for detecting various types of anomalies
29 Performance Analysis Anomaly Detection Examples Anomaly Detection (SHT) Affects of the second spatial smoothing stage on calculated distance
 Texture #2 (for anomaly) Typical texture with")
30 Performance Analysis Anomaly Detection Examples Anomaly Detection (SHT) ROC curves using anomaly taken from texture with no evident visual resemblance to the background clutter Texture #1 (for background) Texture #2 (for anomaly) Typical texture with anomaly
 Texture #2 (for anomaly) Typical texture with")
31 Performance Analysis Anomaly Detection Examples Anomaly Detection (SHT) ROC curves using anomaly taken from texture with evident visual resemblance to the background clutter Texture #1 (for background) Texture #2 (for anomaly) Typical texture with anomaly
32 Anomaly Detection (SHT) Comparison of Classification Results Performance Analysis Anomaly Detection Examples Average Worst Best Std [%] [%] [%] Proposed Mittelman & Porat Mittelman & Porat (ICIP 2005) NA Liu & Wang (ICIP 2005) 92.5 NA NA NA The results suggest that a better segmentation scheme could be achieved using a fusion of the presented textural features and Mittelman & Porat segmentation algorithm (EUSIPCO 2005)
33 Anomaly Subspace Detection (MSD) KLT affects on detection performance Performance Analysis Anomaly Detection Examples
34 Anomaly Subspace Detection (MSD) ROC curves - compared to recent published detectors Performance Analysis Anomaly Detection Examples
35 Anomaly Subspace Detection (MSD) SNR improvement Performance Analysis Anomaly Detection Examples The squaring non-linearity ensures higher GLR values whenever a certain minimum SNR threshold is assured SNER SNR 26.3 [db]
36 Performance Analysis Anomaly Detection Examples Anomaly Subspace Detection (MSD) MSD performance - compared to recent published detectors
37 Anomaly Subspace Detection (MSD) GLR distribution under hypothesis H 0 Performance Analysis Anomaly Detection Examples In practice, the background innovations should follow an elliptical multivariate t-distribution and the kth layer GLR then follows a univariate F-distribution The resulting GLR then follows a mixture of p F-distributions and a new threshold η can be derived to ensure a required false alarm rate (Manolakis and Shaw 2002)


38 Performance Analysis Anomaly Detection Examples Anomaly Detection of Detached Anomalies


39 Performance Analysis Anomaly Detection Examples Anomaly Detection of Additive Anomalies

40 Performance Analysis Anomaly Detection Examples Anomaly Detection of Additive Anomalies Bank of Subspace Detectors, SNER=0[dB] Background: Fabric, Anomaly 1: Woodgrain, Anomaly 2: Raffia Detector 1 Detector 2

![Subspace Detectors, SNER=0[dB] Background: Raffia,](/docs-images/74/70756819/images/41-1.jpg "Anomaly 1: Fabric, Anomaly 2: Woodgrain Detector 1")
41 Performance Analysis Anomaly Detection Examples Anomaly Detection of Additive Anomalies Bank of Subspace Detectors, SNER=0[dB] Background: Raffia, Anomaly 1: Fabric, Anomaly 2: Woodgrain Detector 1 Detector 2

42 Performance Analysis Anomaly Detection Examples Anomaly Detection of Additive Anomalies Bank of Subspace Detectors, SNER=0[dB] Background: Woodgrain, Anomaly 1: Raffia, Anomaly 2: Fabric Detector 1 Detector 2




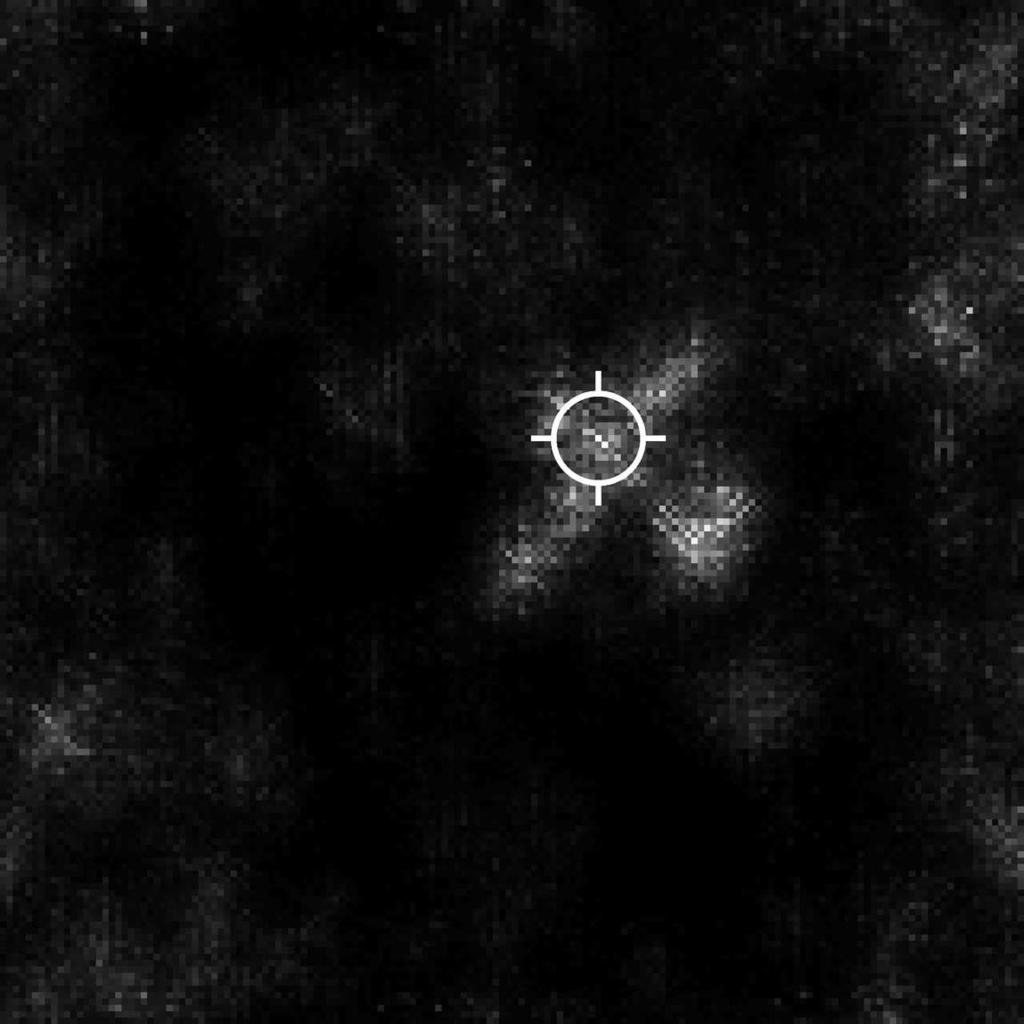


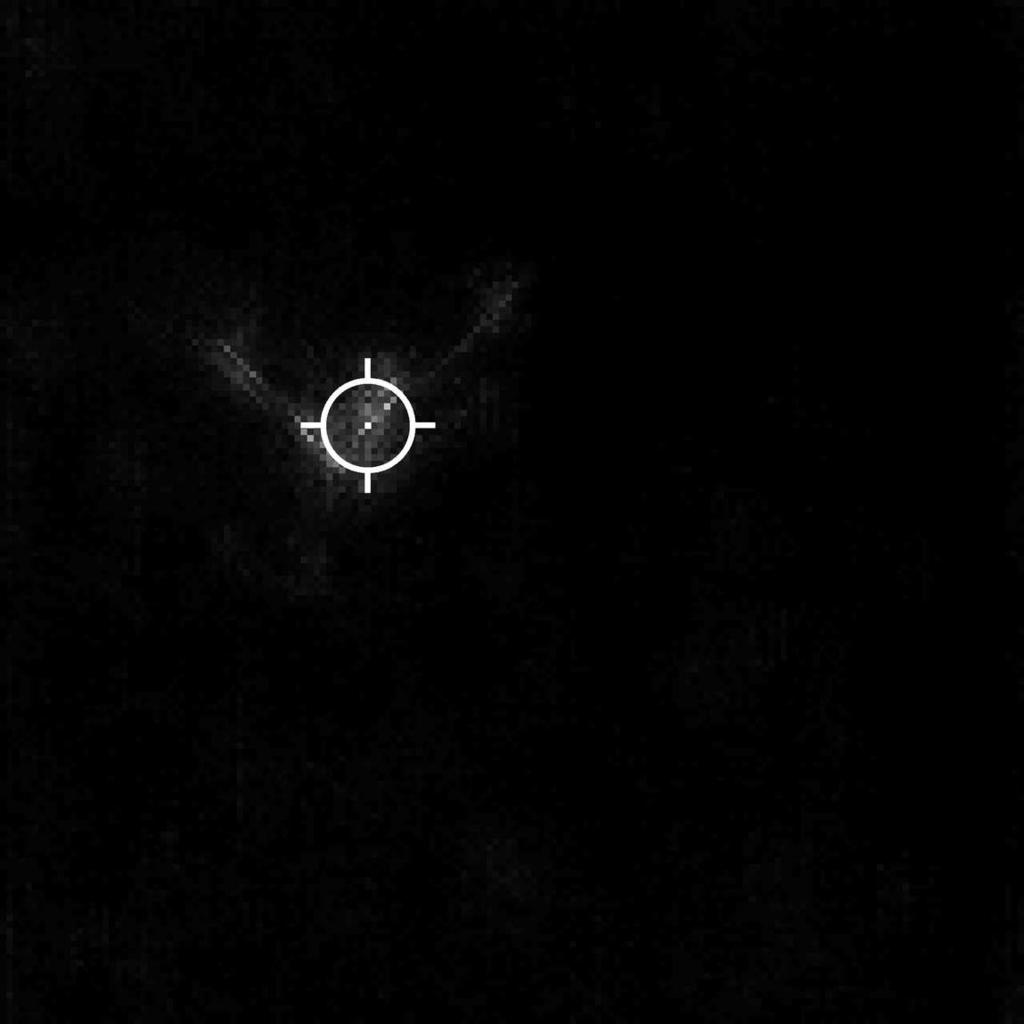
43 Performance Analysis Anomaly Detection Examples Anomaly Detection in Side Scan Sonar Images Subspace Detector
44 Anomaly Detection Using MR Gaussian Textural Features We have presented a multi-resolution Gaussian feature space We have proposed a textural signature which uniquely represents the spatial structure of a given background texture We have formulated an unsupervised anomaly detection algorithm with CFAR based on deviations from the proposed textural signature We have formulated a texture classification algorithm with improved classification results based on the proposed textural signature and anomaly detection scheme
45 Anomaly Subspace Detection Using MR Textural Features We have proposed a multi-resolution RFM which is less susceptible to its choice of neighbors, achieving a smaller prediction error We have formulated a Multi-resolution feature space with enhanced anomaly segregation with respect to the spatial structure of the background texture, based on the proposed RFM We have formulated an unsupervised anomaly subspace detection algorithm, designated to detect additive anomalies in harsh environments where signal to noise energy ratio values are very low
Detection of anomalies in texture images using multi-resolution random field models
 ARTICLE IN PRESS Signal Processing 87 (2007) 3045 3062 www.elsevier.com/locate/sigpro Detection of anomalies in texture images using multi-resolution random field models Lior Shadhan, Israel Cohen Department
ARTICLE IN PRESS Signal Processing 87 (2007) 3045 3062 www.elsevier.com/locate/sigpro Detection of anomalies in texture images using multi-resolution random field models Lior Shadhan, Israel Cohen Department
CFAR TARGET DETECTION IN TREE SCATTERING INTERFERENCE
 CFAR TARGET DETECTION IN TREE SCATTERING INTERFERENCE Anshul Sharma and Randolph L. Moses Department of Electrical Engineering, The Ohio State University, Columbus, OH 43210 ABSTRACT We have developed
CFAR TARGET DETECTION IN TREE SCATTERING INTERFERENCE Anshul Sharma and Randolph L. Moses Department of Electrical Engineering, The Ohio State University, Columbus, OH 43210 ABSTRACT We have developed
Hyung So0 Kim and Alfred 0. Hero
 WHEN IS A MAXIMAL INVARIANT HYPOTHESIS TEST BETTER THAN THE GLRT? Hyung So0 Kim and Alfred 0. Hero Department of Electrical Engineering and Computer Science University of Michigan, Ann Arbor, MI 48109-2122
WHEN IS A MAXIMAL INVARIANT HYPOTHESIS TEST BETTER THAN THE GLRT? Hyung So0 Kim and Alfred 0. Hero Department of Electrical Engineering and Computer Science University of Michigan, Ann Arbor, MI 48109-2122
WHEN IS A MAXIMAL INVARIANT HYPOTHESIS TEST BETTER THAN THE GLRT? Hyung Soo Kim and Alfred O. Hero
 WHEN IS A MAXIMAL INVARIANT HYPTHESIS TEST BETTER THAN THE GLRT? Hyung Soo Kim and Alfred. Hero Department of Electrical Engineering and Computer Science University of Michigan, Ann Arbor, MI 489-222 ABSTRACT
WHEN IS A MAXIMAL INVARIANT HYPTHESIS TEST BETTER THAN THE GLRT? Hyung Soo Kim and Alfred. Hero Department of Electrical Engineering and Computer Science University of Michigan, Ann Arbor, MI 489-222 ABSTRACT
An Investigation of the Generalised Range-Based Detector in Pareto Distributed Clutter
 Progress In Electromagnetics Research C, Vol. 85, 1 8, 2018 An Investigation of the Generalised Range-Based Detector in Pareto Distributed Clutter Graham V. Weinberg * and Charlie Tran Abstract The purpose
Progress In Electromagnetics Research C, Vol. 85, 1 8, 2018 An Investigation of the Generalised Range-Based Detector in Pareto Distributed Clutter Graham V. Weinberg * and Charlie Tran Abstract The purpose
Signal Detection Basics - CFAR
 Signal Detection Basics - CFAR Types of noise clutter and signals targets Signal separation by comparison threshold detection Signal Statistics - Parameter estimation Threshold determination based on the
Signal Detection Basics - CFAR Types of noise clutter and signals targets Signal separation by comparison threshold detection Signal Statistics - Parameter estimation Threshold determination based on the
Parametric Models. Dr. Shuang LIANG. School of Software Engineering TongJi University Fall, 2012
 Parametric Models Dr. Shuang LIANG School of Software Engineering TongJi University Fall, 2012 Today s Topics Maximum Likelihood Estimation Bayesian Density Estimation Today s Topics Maximum Likelihood
Parametric Models Dr. Shuang LIANG School of Software Engineering TongJi University Fall, 2012 Today s Topics Maximum Likelihood Estimation Bayesian Density Estimation Today s Topics Maximum Likelihood
Plug-in Measure-Transformed Quasi Likelihood Ratio Test for Random Signal Detection
 Plug-in Measure-Transformed Quasi Likelihood Ratio Test for Random Signal Detection Nir Halay and Koby Todros Dept. of ECE, Ben-Gurion University of the Negev, Beer-Sheva, Israel February 13, 2017 1 /
Plug-in Measure-Transformed Quasi Likelihood Ratio Test for Random Signal Detection Nir Halay and Koby Todros Dept. of ECE, Ben-Gurion University of the Negev, Beer-Sheva, Israel February 13, 2017 1 /
Chapter 3: Maximum-Likelihood & Bayesian Parameter Estimation (part 1)
") HW 1 due today Parameter Estimation Biometrics CSE 190 Lecture 7 Today s lecture was on the blackboard. These slides are an alternative presentation of the material. CSE190, Winter10 CSE190, Winter10 Chapter
HW 1 due today Parameter Estimation Biometrics CSE 190 Lecture 7 Today s lecture was on the blackboard. These slides are an alternative presentation of the material. CSE190, Winter10 CSE190, Winter10 Chapter
A GLRT FOR RADAR DETECTION IN THE PRESENCE OF COMPOUND-GAUSSIAN CLUTTER AND ADDITIVE WHITE GAUSSIAN NOISE. James H. Michels. Bin Liu, Biao Chen
 A GLRT FOR RADAR DETECTION IN THE PRESENCE OF COMPOUND-GAUSSIAN CLUTTER AND ADDITIVE WHITE GAUSSIAN NOISE Bin Liu, Biao Chen Syracuse University Dept of EECS, Syracuse, NY 3244 email : biliu{bichen}@ecs.syr.edu
A GLRT FOR RADAR DETECTION IN THE PRESENCE OF COMPOUND-GAUSSIAN CLUTTER AND ADDITIVE WHITE GAUSSIAN NOISE Bin Liu, Biao Chen Syracuse University Dept of EECS, Syracuse, NY 3244 email : biliu{bichen}@ecs.syr.edu
Research Article Statistical Analysis of Hyper-Spectral Data: A Non-Gaussian Approach
 Hindawi Publishing Corporation EURASIP Journal on Advances in Signal Processing Volume 27, Article ID 27673, 1 pages doi:1.1155/27/27673 Research Article Statistical Analysis of Hyper-Spectral Data: A
Hindawi Publishing Corporation EURASIP Journal on Advances in Signal Processing Volume 27, Article ID 27673, 1 pages doi:1.1155/27/27673 Research Article Statistical Analysis of Hyper-Spectral Data: A
ECE 661: Homework 10 Fall 2014
 ECE 661: Homework 10 Fall 2014 This homework consists of the following two parts: (1) Face recognition with PCA and LDA for dimensionality reduction and the nearest-neighborhood rule for classification;
ECE 661: Homework 10 Fall 2014 This homework consists of the following two parts: (1) Face recognition with PCA and LDA for dimensionality reduction and the nearest-neighborhood rule for classification;
EEL 851: Biometrics. An Overview of Statistical Pattern Recognition EEL 851 1
 EEL 851: Biometrics An Overview of Statistical Pattern Recognition EEL 851 1 Outline Introduction Pattern Feature Noise Example Problem Analysis Segmentation Feature Extraction Classification Design Cycle
EEL 851: Biometrics An Overview of Statistical Pattern Recognition EEL 851 1 Outline Introduction Pattern Feature Noise Example Problem Analysis Segmentation Feature Extraction Classification Design Cycle
Composite Hypotheses and Generalized Likelihood Ratio Tests
 Composite Hypotheses and Generalized Likelihood Ratio Tests Rebecca Willett, 06 In many real world problems, it is difficult to precisely specify probability distributions. Our models for data may involve
Composite Hypotheses and Generalized Likelihood Ratio Tests Rebecca Willett, 06 In many real world problems, it is difficult to precisely specify probability distributions. Our models for data may involve
Passive Sonar Detection Performance Prediction of a Moving Source in an Uncertain Environment
 Acoustical Society of America Meeting Fall 2005 Passive Sonar Detection Performance Prediction of a Moving Source in an Uncertain Environment Vivek Varadarajan and Jeffrey Krolik Duke University Department
Acoustical Society of America Meeting Fall 2005 Passive Sonar Detection Performance Prediction of a Moving Source in an Uncertain Environment Vivek Varadarajan and Jeffrey Krolik Duke University Department
ECE 521. Lecture 11 (not on midterm material) 13 February K-means clustering, Dimensionality reduction
 13 February K-means clustering, Dimensionality reduction") ECE 521 Lecture 11 (not on midterm material) 13 February 2017 K-means clustering, Dimensionality reduction With thanks to Ruslan Salakhutdinov for an earlier version of the slides Overview K-means clustering
ECE 521 Lecture 11 (not on midterm material) 13 February 2017 K-means clustering, Dimensionality reduction With thanks to Ruslan Salakhutdinov for an earlier version of the slides Overview K-means clustering
Introduction to Statistical Inference
 Structural Health Monitoring Using Statistical Pattern Recognition Introduction to Statistical Inference Presented by Charles R. Farrar, Ph.D., P.E. Outline Introduce statistical decision making for Structural
Structural Health Monitoring Using Statistical Pattern Recognition Introduction to Statistical Inference Presented by Charles R. Farrar, Ph.D., P.E. Outline Introduce statistical decision making for Structural
L11: Pattern recognition principles
 L11: Pattern recognition principles Bayesian decision theory Statistical classifiers Dimensionality reduction Clustering This lecture is partly based on [Huang, Acero and Hon, 2001, ch. 4] Introduction
L11: Pattern recognition principles Bayesian decision theory Statistical classifiers Dimensionality reduction Clustering This lecture is partly based on [Huang, Acero and Hon, 2001, ch. 4] Introduction
Detection theory 101 ELEC-E5410 Signal Processing for Communications
 Detection theory 101 ELEC-E5410 Signal Processing for Communications Binary hypothesis testing Null hypothesis H 0 : e.g. noise only Alternative hypothesis H 1 : signal + noise p(x;h 0 ) γ p(x;h 1 ) Trade-off
Detection theory 101 ELEC-E5410 Signal Processing for Communications Binary hypothesis testing Null hypothesis H 0 : e.g. noise only Alternative hypothesis H 1 : signal + noise p(x;h 0 ) γ p(x;h 1 ) Trade-off
Defect Detection Using Hidden Markov Random Fields
 Electrical and Computer Engineering Publications Electrical and Computer Engineering 5 Defect Detection Using Hidden Markov Random Fields Aleksandar Dogandžić Iowa State University, ald@iastate.edu Nawanat
Electrical and Computer Engineering Publications Electrical and Computer Engineering 5 Defect Detection Using Hidden Markov Random Fields Aleksandar Dogandžić Iowa State University, ald@iastate.edu Nawanat
Clustering VS Classification
 MCQ Clustering VS Classification 1. What is the relation between the distance between clusters and the corresponding class discriminability? a. proportional b. inversely-proportional c. no-relation Ans:
MCQ Clustering VS Classification 1. What is the relation between the distance between clusters and the corresponding class discriminability? a. proportional b. inversely-proportional c. no-relation Ans:
Bayesian Decision Theory
 Bayesian Decision Theory Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Fall 2017 CS 551, Fall 2017 c 2017, Selim Aksoy (Bilkent University) 1 / 46 Bayesian
Bayesian Decision Theory Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Fall 2017 CS 551, Fall 2017 c 2017, Selim Aksoy (Bilkent University) 1 / 46 Bayesian
Antonio De Maio, Maria S. Greco, and Danilo Orlando. 1.1 Historical Background and Terminology Symbols Detection Theory 6
 Contents 1 Introduction to Radar Detection 1 Antonio De Maio, Maria S. Greco, and Danilo Orlando 1.1 Historical Background and Terminology 1 1.2 Symbols 5 1.3 Detection Theory 6 1.3.1 Signal and Interference
Contents 1 Introduction to Radar Detection 1 Antonio De Maio, Maria S. Greco, and Danilo Orlando 1.1 Historical Background and Terminology 1 1.2 Symbols 5 1.3 Detection Theory 6 1.3.1 Signal and Interference
Spatial Bayesian Nonparametrics for Natural Image Segmentation
 Spatial Bayesian Nonparametrics for Natural Image Segmentation Erik Sudderth Brown University Joint work with Michael Jordan University of California Soumya Ghosh Brown University Parsing Visual Scenes
Spatial Bayesian Nonparametrics for Natural Image Segmentation Erik Sudderth Brown University Joint work with Michael Jordan University of California Soumya Ghosh Brown University Parsing Visual Scenes
Maximum Likelihood Estimation. only training data is available to design a classifier
 Introduction to Pattern Recognition [ Part 5 ] Mahdi Vasighi Introduction Bayesian Decision Theory shows that we could design an optimal classifier if we knew: P( i ) : priors p(x i ) : class-conditional
Introduction to Pattern Recognition [ Part 5 ] Mahdi Vasighi Introduction Bayesian Decision Theory shows that we could design an optimal classifier if we knew: P( i ) : priors p(x i ) : class-conditional
TARGET DETECTION WITH FUNCTION OF COVARIANCE MATRICES UNDER CLUTTER ENVIRONMENT
 TARGET DETECTION WITH FUNCTION OF COVARIANCE MATRICES UNDER CLUTTER ENVIRONMENT Feng Lin, Robert C. Qiu, James P. Browning, Michael C. Wicks Cognitive Radio Institute, Department of Electrical and Computer
TARGET DETECTION WITH FUNCTION OF COVARIANCE MATRICES UNDER CLUTTER ENVIRONMENT Feng Lin, Robert C. Qiu, James P. Browning, Michael C. Wicks Cognitive Radio Institute, Department of Electrical and Computer
Density Estimation. Seungjin Choi
 Density Estimation Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr http://mlg.postech.ac.kr/
Density Estimation Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr http://mlg.postech.ac.kr/
Image representation with multi-scale gradients
 Image representation with multi-scale gradients Eero P Simoncelli Center for Neural Science, and Courant Institute of Mathematical Sciences New York University http://www.cns.nyu.edu/~eero Visual image
Image representation with multi-scale gradients Eero P Simoncelli Center for Neural Science, and Courant Institute of Mathematical Sciences New York University http://www.cns.nyu.edu/~eero Visual image
Probabilistic Methods in Bioinformatics. Pabitra Mitra
 Probabilistic Methods in Bioinformatics Pabitra Mitra pabitra@cse.iitkgp.ernet.in Probability in Bioinformatics Classification Categorize a new object into a known class Supervised learning/predictive
Probabilistic Methods in Bioinformatics Pabitra Mitra pabitra@cse.iitkgp.ernet.in Probability in Bioinformatics Classification Categorize a new object into a known class Supervised learning/predictive
Adaptive Multi-Modal Sensing of General Concealed Targets
 Adaptive Multi-Modal Sensing of General Concealed argets Lawrence Carin Balaji Krishnapuram, David Williams, Xuejun Liao and Ya Xue Department of Electrical & Computer Engineering Duke University Durham,
Adaptive Multi-Modal Sensing of General Concealed argets Lawrence Carin Balaji Krishnapuram, David Williams, Xuejun Liao and Ya Xue Department of Electrical & Computer Engineering Duke University Durham,
The Bayes classifier
 The Bayes classifier Consider where is a random vector in is a random variable (depending on ) Let be a classifier with probability of error/risk given by The Bayes classifier (denoted ) is the optimal
The Bayes classifier Consider where is a random vector in is a random variable (depending on ) Let be a classifier with probability of error/risk given by The Bayes classifier (denoted ) is the optimal
Corner. Corners are the intersections of two edges of sufficiently different orientations.
 2D Image Features Two dimensional image features are interesting local structures. They include junctions of different types like Y, T, X, and L. Much of the work on 2D features focuses on junction L,
2D Image Features Two dimensional image features are interesting local structures. They include junctions of different types like Y, T, X, and L. Much of the work on 2D features focuses on junction L,
10. Composite Hypothesis Testing. ECE 830, Spring 2014
 10. Composite Hypothesis Testing ECE 830, Spring 2014 1 / 25 In many real world problems, it is difficult to precisely specify probability distributions. Our models for data may involve unknown parameters
10. Composite Hypothesis Testing ECE 830, Spring 2014 1 / 25 In many real world problems, it is difficult to precisely specify probability distributions. Our models for data may involve unknown parameters
A SIRV-CFAR Adaptive Detector Exploiting Persymmetric Clutter Covariance Structure
 A SIRV-CFAR Adaptive Detector Exploiting Persymmetric Clutter Covariance Structure Guilhem Pailloux 2 Jean-Philippe Ovarlez Frédéric Pascal 3 and Philippe Forster 2 ONERA - DEMR/TSI Chemin de la Hunière
A SIRV-CFAR Adaptive Detector Exploiting Persymmetric Clutter Covariance Structure Guilhem Pailloux 2 Jean-Philippe Ovarlez Frédéric Pascal 3 and Philippe Forster 2 ONERA - DEMR/TSI Chemin de la Hunière
Image Noise: Detection, Measurement and Removal Techniques. Zhifei Zhang
 Image Noise: Detection, Measurement and Removal Techniques Zhifei Zhang Outline Noise measurement Filter-based Block-based Wavelet-based Noise removal Spatial domain Transform domain Non-local methods
Image Noise: Detection, Measurement and Removal Techniques Zhifei Zhang Outline Noise measurement Filter-based Block-based Wavelet-based Noise removal Spatial domain Transform domain Non-local methods
Research Overview. Kristjan Greenewald. February 2, University of Michigan - Ann Arbor
 Research Overview Kristjan Greenewald University of Michigan - Ann Arbor February 2, 2016 2/17 Background and Motivation Want efficient statistical modeling of high-dimensional spatio-temporal data with
Research Overview Kristjan Greenewald University of Michigan - Ann Arbor February 2, 2016 2/17 Background and Motivation Want efficient statistical modeling of high-dimensional spatio-temporal data with
Algorithmisches Lernen/Machine Learning
 Algorithmisches Lernen/Machine Learning Part 1: Stefan Wermter Introduction Connectionist Learning (e.g. Neural Networks) Decision-Trees, Genetic Algorithms Part 2: Norman Hendrich Support-Vector Machines
Algorithmisches Lernen/Machine Learning Part 1: Stefan Wermter Introduction Connectionist Learning (e.g. Neural Networks) Decision-Trees, Genetic Algorithms Part 2: Norman Hendrich Support-Vector Machines
STA414/2104 Statistical Methods for Machine Learning II
 STA414/2104 Statistical Methods for Machine Learning II Murat A. Erdogdu & David Duvenaud Department of Computer Science Department of Statistical Sciences Lecture 3 Slide credits: Russ Salakhutdinov Announcements
STA414/2104 Statistical Methods for Machine Learning II Murat A. Erdogdu & David Duvenaud Department of Computer Science Department of Statistical Sciences Lecture 3 Slide credits: Russ Salakhutdinov Announcements
Uncertainty. Jayakrishnan Unnikrishnan. CSL June PhD Defense ECE Department
 Decision-Making under Statistical Uncertainty Jayakrishnan Unnikrishnan PhD Defense ECE Department University of Illinois at Urbana-Champaign CSL 141 12 June 2010 Statistical Decision-Making Relevant in
Decision-Making under Statistical Uncertainty Jayakrishnan Unnikrishnan PhD Defense ECE Department University of Illinois at Urbana-Champaign CSL 141 12 June 2010 Statistical Decision-Making Relevant in
Machine Learning Linear Classification. Prof. Matteo Matteucci
 Machine Learning Linear Classification Prof. Matteo Matteucci Recall from the first lecture 2 X R p Regression Y R Continuous Output X R p Y {Ω 0, Ω 1,, Ω K } Classification Discrete Output X R p Y (X)
Machine Learning Linear Classification Prof. Matteo Matteucci Recall from the first lecture 2 X R p Regression Y R Continuous Output X R p Y {Ω 0, Ω 1,, Ω K } Classification Discrete Output X R p Y (X)
Multimedia Databases. Previous Lecture. 4.1 Multiresolution Analysis. 4 Shape-based Features. 4.1 Multiresolution Analysis
 Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
Multimedia Databases. Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig
 Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
Robust covariance matrices estimation and applications in signal processing
 Robust covariance matrices estimation and applications in signal processing F. Pascal SONDRA/Supelec GDR ISIS Journée Estimation et traitement statistique en grande dimension May 16 th, 2013 FP (SONDRA/Supelec)
Robust covariance matrices estimation and applications in signal processing F. Pascal SONDRA/Supelec GDR ISIS Journée Estimation et traitement statistique en grande dimension May 16 th, 2013 FP (SONDRA/Supelec)
SEC: Stochastic ensemble consensus approach to unsupervised SAR sea-ice segmentation
 2009 Canadian Conference on Computer and Robot Vision SEC: Stochastic ensemble consensus approach to unsupervised SAR sea-ice segmentation Alexander Wong, David A. Clausi, and Paul Fieguth Vision and Image
2009 Canadian Conference on Computer and Robot Vision SEC: Stochastic ensemble consensus approach to unsupervised SAR sea-ice segmentation Alexander Wong, David A. Clausi, and Paul Fieguth Vision and Image
Multimedia Databases. 4 Shape-based Features. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis
 4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
ABSTRACT. This dissertation proposes and evaluates a novel anomaly detection algorithm
 ABSTRACT Title of Dissertation: ALGORITHM DEVELOPMENT FOR HYPERSPECTRAL ANOMALY DETECTION. Dalton S. Rosario Doctor of Philosophy 008 Dissertation Directed By: Professor Ramalingam Chellappa Department
ABSTRACT Title of Dissertation: ALGORITHM DEVELOPMENT FOR HYPERSPECTRAL ANOMALY DETECTION. Dalton S. Rosario Doctor of Philosophy 008 Dissertation Directed By: Professor Ramalingam Chellappa Department
CS534 Machine Learning - Spring Final Exam
 CS534 Machine Learning - Spring 2013 Final Exam Name: You have 110 minutes. There are 6 questions (8 pages including cover page). If you get stuck on one question, move on to others and come back to the
CS534 Machine Learning - Spring 2013 Final Exam Name: You have 110 minutes. There are 6 questions (8 pages including cover page). If you get stuck on one question, move on to others and come back to the
ECE521 week 3: 23/26 January 2017
 ECE521 week 3: 23/26 January 2017 Outline Probabilistic interpretation of linear regression - Maximum likelihood estimation (MLE) - Maximum a posteriori (MAP) estimation Bias-variance trade-off Linear
ECE521 week 3: 23/26 January 2017 Outline Probabilistic interpretation of linear regression - Maximum likelihood estimation (MLE) - Maximum a posteriori (MAP) estimation Bias-variance trade-off Linear
Classification for High Dimensional Problems Using Bayesian Neural Networks and Dirichlet Diffusion Trees
 Classification for High Dimensional Problems Using Bayesian Neural Networks and Dirichlet Diffusion Trees Rafdord M. Neal and Jianguo Zhang Presented by Jiwen Li Feb 2, 2006 Outline Bayesian view of feature
Classification for High Dimensional Problems Using Bayesian Neural Networks and Dirichlet Diffusion Trees Rafdord M. Neal and Jianguo Zhang Presented by Jiwen Li Feb 2, 2006 Outline Bayesian view of feature
Nonstationary spatial process modeling Part II Paul D. Sampson --- Catherine Calder Univ of Washington --- Ohio State University
 Nonstationary spatial process modeling Part II Paul D. Sampson --- Catherine Calder Univ of Washington --- Ohio State University this presentation derived from that presented at the Pan-American Advanced
Nonstationary spatial process modeling Part II Paul D. Sampson --- Catherine Calder Univ of Washington --- Ohio State University this presentation derived from that presented at the Pan-American Advanced
Modeling Multiscale Differential Pixel Statistics
 Modeling Multiscale Differential Pixel Statistics David Odom a and Peyman Milanfar a a Electrical Engineering Department, University of California, Santa Cruz CA. 95064 USA ABSTRACT The statistics of natural
Modeling Multiscale Differential Pixel Statistics David Odom a and Peyman Milanfar a a Electrical Engineering Department, University of California, Santa Cruz CA. 95064 USA ABSTRACT The statistics of natural
Détection de sources astrophysiques dans les données du spectrographe intégral de champ MUSE
 Détection de sources astrophysiques dans les données du spectrographe intégral de champ MUSE David Mary, André Ferrari and Raja Fazliza R.S. Université de Nice Sophia Antipolis, France Porquerolles, 15
Détection de sources astrophysiques dans les données du spectrographe intégral de champ MUSE David Mary, André Ferrari and Raja Fazliza R.S. Université de Nice Sophia Antipolis, France Porquerolles, 15
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Brief Introduction of Machine Learning Techniques for Content Analysis
 1 Brief Introduction of Machine Learning Techniques for Content Analysis Wei-Ta Chu 2008/11/20 Outline 2 Overview Gaussian Mixture Model (GMM) Hidden Markov Model (HMM) Support Vector Machine (SVM) Overview
1 Brief Introduction of Machine Learning Techniques for Content Analysis Wei-Ta Chu 2008/11/20 Outline 2 Overview Gaussian Mixture Model (GMM) Hidden Markov Model (HMM) Support Vector Machine (SVM) Overview
Wavelet Based Image Restoration Using Cross-Band Operators
 1 Wavelet Based Image Restoration Using Cross-Band Operators Erez Cohen Electrical Engineering Department Technion - Israel Institute of Technology Supervised by Prof. Israel Cohen 2 Layout Introduction
1 Wavelet Based Image Restoration Using Cross-Band Operators Erez Cohen Electrical Engineering Department Technion - Israel Institute of Technology Supervised by Prof. Israel Cohen 2 Layout Introduction
High Dimensional Discriminant Analysis
 High Dimensional Discriminant Analysis Charles Bouveyron LMC-IMAG & INRIA Rhône-Alpes Joint work with S. Girard and C. Schmid High Dimensional Discriminant Analysis - Lear seminar p.1/43 Introduction High
High Dimensional Discriminant Analysis Charles Bouveyron LMC-IMAG & INRIA Rhône-Alpes Joint work with S. Girard and C. Schmid High Dimensional Discriminant Analysis - Lear seminar p.1/43 Introduction High
Introduction to Signal Detection and Classification. Phani Chavali
 Introduction to Signal Detection and Classification Phani Chavali Outline Detection Problem Performance Measures Receiver Operating Characteristics (ROC) F-Test - Test Linear Discriminant Analysis (LDA)
Introduction to Signal Detection and Classification Phani Chavali Outline Detection Problem Performance Measures Receiver Operating Characteristics (ROC) F-Test - Test Linear Discriminant Analysis (LDA)
Metric-based classifiers. Nuno Vasconcelos UCSD
 Metric-based classifiers Nuno Vasconcelos UCSD Statistical learning goal: given a function f. y f and a collection of eample data-points, learn what the function f. is. this is called training. two major
Metric-based classifiers Nuno Vasconcelos UCSD Statistical learning goal: given a function f. y f and a collection of eample data-points, learn what the function f. is. this is called training. two major
University of Siena. Multimedia Security. Watermark extraction. Mauro Barni University of Siena. M. Barni, University of Siena
 Multimedia Security Mauro Barni University of Siena : summary Optimum decoding/detection Additive SS watermarks Decoding/detection of QIM watermarks The dilemma of de-synchronization attacks Geometric
Multimedia Security Mauro Barni University of Siena : summary Optimum decoding/detection Additive SS watermarks Decoding/detection of QIM watermarks The dilemma of de-synchronization attacks Geometric
Statistical and Learning Techniques in Computer Vision Lecture 2: Maximum Likelihood and Bayesian Estimation Jens Rittscher and Chuck Stewart
 Statistical and Learning Techniques in Computer Vision Lecture 2: Maximum Likelihood and Bayesian Estimation Jens Rittscher and Chuck Stewart 1 Motivation and Problem In Lecture 1 we briefly saw how histograms
Statistical and Learning Techniques in Computer Vision Lecture 2: Maximum Likelihood and Bayesian Estimation Jens Rittscher and Chuck Stewart 1 Motivation and Problem In Lecture 1 we briefly saw how histograms
Minimum Error-Rate Discriminant
 Discriminants Minimum Error-Rate Discriminant In the case of zero-one loss function, the Bayes Discriminant can be further simplified: g i (x) =P (ω i x). (29) J. Corso (SUNY at Buffalo) Bayesian Decision
Discriminants Minimum Error-Rate Discriminant In the case of zero-one loss function, the Bayes Discriminant can be further simplified: g i (x) =P (ω i x). (29) J. Corso (SUNY at Buffalo) Bayesian Decision
Lecture 13: Data Modelling and Distributions. Intelligent Data Analysis and Probabilistic Inference Lecture 13 Slide No 1
 Lecture 13: Data Modelling and Distributions Intelligent Data Analysis and Probabilistic Inference Lecture 13 Slide No 1 Why data distributions? It is a well established fact that many naturally occurring
Lecture 13: Data Modelling and Distributions Intelligent Data Analysis and Probabilistic Inference Lecture 13 Slide No 1 Why data distributions? It is a well established fact that many naturally occurring
Pattern Recognition. Parameter Estimation of Probability Density Functions
 Pattern Recognition Parameter Estimation of Probability Density Functions Classification Problem (Review) The classification problem is to assign an arbitrary feature vector x F to one of c classes. The
Pattern Recognition Parameter Estimation of Probability Density Functions Classification Problem (Review) The classification problem is to assign an arbitrary feature vector x F to one of c classes. The
Lecture Outline. Target Tracking: Lecture 3 Maneuvering Target Tracking Issues. Maneuver Illustration. Maneuver Illustration. Maneuver Detection
 REGLERTEKNIK Lecture Outline AUTOMATIC CONTROL Target Tracking: Lecture 3 Maneuvering Target Tracking Issues Maneuver Detection Emre Özkan emre@isy.liu.se Division of Automatic Control Department of Electrical
REGLERTEKNIK Lecture Outline AUTOMATIC CONTROL Target Tracking: Lecture 3 Maneuvering Target Tracking Issues Maneuver Detection Emre Özkan emre@isy.liu.se Division of Automatic Control Department of Electrical
Face Recognition Using Laplacianfaces He et al. (IEEE Trans PAMI, 2005) presented by Hassan A. Kingravi
 presented by Hassan A. Kingravi") Face Recognition Using Laplacianfaces He et al. (IEEE Trans PAMI, 2005) presented by Hassan A. Kingravi Overview Introduction Linear Methods for Dimensionality Reduction Nonlinear Methods and Manifold
Face Recognition Using Laplacianfaces He et al. (IEEE Trans PAMI, 2005) presented by Hassan A. Kingravi Overview Introduction Linear Methods for Dimensionality Reduction Nonlinear Methods and Manifold
A Novel Detection Paradigm and its Comparison to Statistical and Kernel-Based Anomaly Detection Algorithms for Hyperspectral Imagery
 A Novel Detection Paradigm and its Comparison to Statistical and Kernel-Based Anomaly Detection Algorithms for Hyperspectral Imagery Colin C. Olson and Timothy Doster U.S. Naval Research Laboratory 4555
A Novel Detection Paradigm and its Comparison to Statistical and Kernel-Based Anomaly Detection Algorithms for Hyperspectral Imagery Colin C. Olson and Timothy Doster U.S. Naval Research Laboratory 4555
Statistical Data Analysis Stat 3: p-values, parameter estimation
 Statistical Data Analysis Stat 3: p-values, parameter estimation London Postgraduate Lectures on Particle Physics; University of London MSci course PH4515 Glen Cowan Physics Department Royal Holloway,
Statistical Data Analysis Stat 3: p-values, parameter estimation London Postgraduate Lectures on Particle Physics; University of London MSci course PH4515 Glen Cowan Physics Department Royal Holloway,
Two-Layered Face Detection System using Evolutionary Algorithm
 Two-Layered Face Detection System using Evolutionary Algorithm Jun-Su Jang Jong-Hwan Kim Dept. of Electrical Engineering and Computer Science, Korea Advanced Institute of Science and Technology (KAIST),
Two-Layered Face Detection System using Evolutionary Algorithm Jun-Su Jang Jong-Hwan Kim Dept. of Electrical Engineering and Computer Science, Korea Advanced Institute of Science and Technology (KAIST),
Intelligent CFAR Detector Based on Support Vector Machine
 Received September 20, 2017, accepted November 9, 2017, date of publication November 16, 2017, date of current version December 22, 2017. Digital Object Identifier 10.1109/ACCESS.2017.2774262 Intelligent
Received September 20, 2017, accepted November 9, 2017, date of publication November 16, 2017, date of current version December 22, 2017. Digital Object Identifier 10.1109/ACCESS.2017.2774262 Intelligent
LECTURE NOTE #3 PROF. ALAN YUILLE
 LECTURE NOTE #3 PROF. ALAN YUILLE 1. Three Topics (1) Precision and Recall Curves. Receiver Operating Characteristic Curves (ROC). What to do if we do not fix the loss function? (2) The Curse of Dimensionality.
LECTURE NOTE #3 PROF. ALAN YUILLE 1. Three Topics (1) Precision and Recall Curves. Receiver Operating Characteristic Curves (ROC). What to do if we do not fix the loss function? (2) The Curse of Dimensionality.
Part I. Linear Discriminant Analysis. Discriminant analysis. Discriminant analysis
 Week 5 Based in part on slides from textbook, slides of Susan Holmes Part I Linear Discriminant Analysis October 29, 2012 1 / 1 2 / 1 Nearest centroid rule Suppose we break down our data matrix as by the
Week 5 Based in part on slides from textbook, slides of Susan Holmes Part I Linear Discriminant Analysis October 29, 2012 1 / 1 2 / 1 Nearest centroid rule Suppose we break down our data matrix as by the
Scalable robust hypothesis tests using graphical models
 Scalable robust hypothesis tests using graphical models Umamahesh Srinivas ipal Group Meeting October 22, 2010 Binary hypothesis testing problem Random vector x = (x 1,...,x n ) R n generated from either
Scalable robust hypothesis tests using graphical models Umamahesh Srinivas ipal Group Meeting October 22, 2010 Binary hypothesis testing problem Random vector x = (x 1,...,x n ) R n generated from either
Convolution and Pooling as an Infinitely Strong Prior
 Convolution and Pooling as an Infinitely Strong Prior Sargur Srihari srihari@buffalo.edu This is part of lecture slides on Deep Learning: http://www.cedar.buffalo.edu/~srihari/cse676 1 Topics in Convolutional
Convolution and Pooling as an Infinitely Strong Prior Sargur Srihari srihari@buffalo.edu This is part of lecture slides on Deep Learning: http://www.cedar.buffalo.edu/~srihari/cse676 1 Topics in Convolutional
STA414/2104. Lecture 11: Gaussian Processes. Department of Statistics
 STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
EXAM IN STATISTICAL MACHINE LEARNING STATISTISK MASKININLÄRNING
 EXAM IN STATISTICAL MACHINE LEARNING STATISTISK MASKININLÄRNING DATE AND TIME: June 9, 2018, 09.00 14.00 RESPONSIBLE TEACHER: Andreas Svensson NUMBER OF PROBLEMS: 5 AIDING MATERIAL: Calculator, mathematical
EXAM IN STATISTICAL MACHINE LEARNING STATISTISK MASKININLÄRNING DATE AND TIME: June 9, 2018, 09.00 14.00 RESPONSIBLE TEACHER: Andreas Svensson NUMBER OF PROBLEMS: 5 AIDING MATERIAL: Calculator, mathematical
BAYESIAN DECISION THEORY
 Last updated: September 17, 2012 BAYESIAN DECISION THEORY Problems 2 The following problems from the textbook are relevant: 2.1 2.9, 2.11, 2.17 For this week, please at least solve Problem 2.3. We will
Last updated: September 17, 2012 BAYESIAN DECISION THEORY Problems 2 The following problems from the textbook are relevant: 2.1 2.9, 2.11, 2.17 For this week, please at least solve Problem 2.3. We will
Performance Analysis of the Nonhomogeneity Detector for STAP Applications
 Performance Analysis of the Nonhomogeneity Detector for STAP Applications uralidhar Rangaswamy ARCON Corporation 6 Bear ill Rd. Waltham, assachusetts, USA Braham imed AFRL/SNRT 6 Electronic Parway Rome,
Performance Analysis of the Nonhomogeneity Detector for STAP Applications uralidhar Rangaswamy ARCON Corporation 6 Bear ill Rd. Waltham, assachusetts, USA Braham imed AFRL/SNRT 6 Electronic Parway Rome,
Machine Learning 2nd Edition
 INTRODUCTION TO Lecture Slides for Machine Learning 2nd Edition ETHEM ALPAYDIN, modified by Leonardo Bobadilla and some parts from http://www.cs.tau.ac.il/~apartzin/machinelearning/ The MIT Press, 2010
INTRODUCTION TO Lecture Slides for Machine Learning 2nd Edition ETHEM ALPAYDIN, modified by Leonardo Bobadilla and some parts from http://www.cs.tau.ac.il/~apartzin/machinelearning/ The MIT Press, 2010
Gaussian Models
 Gaussian Models ddebarr@uw.edu 2016-04-28 Agenda Introduction Gaussian Discriminant Analysis Inference Linear Gaussian Systems The Wishart Distribution Inferring Parameters Introduction Gaussian Density
Gaussian Models ddebarr@uw.edu 2016-04-28 Agenda Introduction Gaussian Discriminant Analysis Inference Linear Gaussian Systems The Wishart Distribution Inferring Parameters Introduction Gaussian Density
PATTERN RECOGNITION AND MACHINE LEARNING
 PATTERN RECOGNITION AND MACHINE LEARNING Slide Set 3: Detection Theory January 2018 Heikki Huttunen heikki.huttunen@tut.fi Department of Signal Processing Tampere University of Technology Detection theory
PATTERN RECOGNITION AND MACHINE LEARNING Slide Set 3: Detection Theory January 2018 Heikki Huttunen heikki.huttunen@tut.fi Department of Signal Processing Tampere University of Technology Detection theory
GEOG 4110/5100 Advanced Remote Sensing Lecture 12. Classification (Supervised and Unsupervised) Richards: 6.1, ,
 Richards: 6.1, ,") GEOG 4110/5100 Advanced Remote Sensing Lecture 12 Classification (Supervised and Unsupervised) Richards: 6.1, 8.1-8.8.2, 9.1-9.34 GEOG 4110/5100 1 Fourier Transforms Transformations in the Frequency Domain
GEOG 4110/5100 Advanced Remote Sensing Lecture 12 Classification (Supervised and Unsupervised) Richards: 6.1, 8.1-8.8.2, 9.1-9.34 GEOG 4110/5100 1 Fourier Transforms Transformations in the Frequency Domain
Lecture 3: Pattern Classification
 EE E6820: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 1 2 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mixtures
EE E6820: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 1 2 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mixtures
Multivariate Gaussian Random Fields with SPDEs
 Multivariate Gaussian Random Fields with SPDEs Xiangping Hu Daniel Simpson, Finn Lindgren and Håvard Rue Department of Mathematics, University of Oslo PASI, 214 Outline The Matérn covariance function and
Multivariate Gaussian Random Fields with SPDEs Xiangping Hu Daniel Simpson, Finn Lindgren and Håvard Rue Department of Mathematics, University of Oslo PASI, 214 Outline The Matérn covariance function and
Unsupervised Anomaly Detection for High Dimensional Data
 Unsupervised Anomaly Detection for High Dimensional Data Department of Mathematics, Rowan University. July 19th, 2013 International Workshop in Sequential Methodologies (IWSM-2013) Outline of Talk Motivation
Unsupervised Anomaly Detection for High Dimensional Data Department of Mathematics, Rowan University. July 19th, 2013 International Workshop in Sequential Methodologies (IWSM-2013) Outline of Talk Motivation
Machine Learning Basics: Maximum Likelihood Estimation
 Machine Learning Basics: Maximum Likelihood Estimation Sargur N. srihari@cedar.buffalo.edu This is part of lecture slides on Deep Learning: http://www.cedar.buffalo.edu/~srihari/cse676 1 Topics 1. Learning
Machine Learning Basics: Maximum Likelihood Estimation Sargur N. srihari@cedar.buffalo.edu This is part of lecture slides on Deep Learning: http://www.cedar.buffalo.edu/~srihari/cse676 1 Topics 1. Learning
2. What are the tradeoffs among different measures of error (e.g. probability of false alarm, probability of miss, etc.)?
?") ECE 830 / CS 76 Spring 06 Instructors: R. Willett & R. Nowak Lecture 3: Likelihood ratio tests, Neyman-Pearson detectors, ROC curves, and sufficient statistics Executive summary In the last lecture we
ECE 830 / CS 76 Spring 06 Instructors: R. Willett & R. Nowak Lecture 3: Likelihood ratio tests, Neyman-Pearson detectors, ROC curves, and sufficient statistics Executive summary In the last lecture we
A PARAMETRIC MOVING TARGET DETECTOR FOR DISTRIBUTED MIMO RADAR IN NON-HOMOGENEOUS ENVIRONMENT
 A PARAMETRIC MOVING TARGET DETECTOR FOR DISTRIBUTED MIMO RADAR IN NON-OMOGENEOUS ENVIRONMENT Pu Wang, ongbin Li, and Braham imed ECE DEPT, Stevens Institute of Technology, oboken, NJ 73, USA AFRL/RYMD,
A PARAMETRIC MOVING TARGET DETECTOR FOR DISTRIBUTED MIMO RADAR IN NON-OMOGENEOUS ENVIRONMENT Pu Wang, ongbin Li, and Braham imed ECE DEPT, Stevens Institute of Technology, oboken, NJ 73, USA AFRL/RYMD,
PATTERN CLASSIFICATION
 PATTERN CLASSIFICATION Second Edition Richard O. Duda Peter E. Hart David G. Stork A Wiley-lnterscience Publication JOHN WILEY & SONS, INC. New York Chichester Weinheim Brisbane Singapore Toronto CONTENTS
PATTERN CLASSIFICATION Second Edition Richard O. Duda Peter E. Hart David G. Stork A Wiley-lnterscience Publication JOHN WILEY & SONS, INC. New York Chichester Weinheim Brisbane Singapore Toronto CONTENTS
WE consider the problem of detecting and localizing a material
 1886 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 55, NO. 5, MAY 2007 Detection and Localization of Material Releases With Sparse Sensor Configurations Emily B. Fox, Student Member, IEEE, John W. Fisher,
1886 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 55, NO. 5, MAY 2007 Detection and Localization of Material Releases With Sparse Sensor Configurations Emily B. Fox, Student Member, IEEE, John W. Fisher,
Lecture 9: Classification, LDA
 Lecture 9: Classification, LDA Reading: Chapter 4 STATS 202: Data mining and analysis October 13, 2017 1 / 21 Review: Main strategy in Chapter 4 Find an estimate ˆP (Y X). Then, given an input x 0, we
Lecture 9: Classification, LDA Reading: Chapter 4 STATS 202: Data mining and analysis October 13, 2017 1 / 21 Review: Main strategy in Chapter 4 Find an estimate ˆP (Y X). Then, given an input x 0, we
Lecture 5: Likelihood ratio tests, Neyman-Pearson detectors, ROC curves, and sufficient statistics. 1 Executive summary
 ECE 830 Spring 207 Instructor: R. Willett Lecture 5: Likelihood ratio tests, Neyman-Pearson detectors, ROC curves, and sufficient statistics Executive summary In the last lecture we saw that the likelihood
ECE 830 Spring 207 Instructor: R. Willett Lecture 5: Likelihood ratio tests, Neyman-Pearson detectors, ROC curves, and sufficient statistics Executive summary In the last lecture we saw that the likelihood
TEMPORAL-SPECTRAL DETECTION IN LONG WAVE INFRARED HYPERSPECTRAL IMAGERY. Daniel C. Heinz Charles E. Davidson Avishai Ben-David
 ECBC-TR-XXX TEMPORAL-SPECTRAL DETECTION IN LONG WAVE INFRARED HYPERSPECTRAL IMAGERY ADD Distribution Statement Unlimited Distribution Daniel C. Heinz Charles E. Davidson Avishai Ben-David Science and Technology
ECBC-TR-XXX TEMPORAL-SPECTRAL DETECTION IN LONG WAVE INFRARED HYPERSPECTRAL IMAGERY ADD Distribution Statement Unlimited Distribution Daniel C. Heinz Charles E. Davidson Avishai Ben-David Science and Technology
Heeyoul (Henry) Choi. Dept. of Computer Science Texas A&M University
 Choi. Dept. of Computer Science Texas A&M University") Heeyoul (Henry) Choi Dept. of Computer Science Texas A&M University hchoi@cs.tamu.edu Introduction Speaker Adaptation Eigenvoice Comparison with others MAP, MLLR, EMAP, RMP, CAT, RSW Experiments Future
Heeyoul (Henry) Choi Dept. of Computer Science Texas A&M University hchoi@cs.tamu.edu Introduction Speaker Adaptation Eigenvoice Comparison with others MAP, MLLR, EMAP, RMP, CAT, RSW Experiments Future
A ROBUST TEST FOR NONLINEAR MIXTURE DETECTION IN HYPERSPECTRAL IMAGES
 A ROBUST TEST FOR NONLINEAR MIXTURE DETECTION IN HYPERSPECTRAL IMAGES Y. Altmann, N. Dobigeon and J-Y. Tourneret University of Toulouse IRIT-ENSEEIHT Toulouse, France J.C.M. Bermudez Federal University
A ROBUST TEST FOR NONLINEAR MIXTURE DETECTION IN HYPERSPECTRAL IMAGES Y. Altmann, N. Dobigeon and J-Y. Tourneret University of Toulouse IRIT-ENSEEIHT Toulouse, France J.C.M. Bermudez Federal University
Lecture 3. STAT161/261 Introduction to Pattern Recognition and Machine Learning Spring 2018 Prof. Allie Fletcher
 Lecture 3 STAT161/261 Introduction to Pattern Recognition and Machine Learning Spring 2018 Prof. Allie Fletcher Previous lectures What is machine learning? Objectives of machine learning Supervised and
Lecture 3 STAT161/261 Introduction to Pattern Recognition and Machine Learning Spring 2018 Prof. Allie Fletcher Previous lectures What is machine learning? Objectives of machine learning Supervised and
Multiframe Detector/Tracker: Optimal Performance
 AES990806, MULTIFRAME DETECTOR/TRACKER: OPTIMAL PERFORMANCE, BRUNO & MOURA 1 Multiframe Detector/Tracker: Optimal Performance Marcelo G. S. Bruno (1) and José M. F. Moura (2) (1) Elect. Eng. Depart., University
AES990806, MULTIFRAME DETECTOR/TRACKER: OPTIMAL PERFORMANCE, BRUNO & MOURA 1 Multiframe Detector/Tracker: Optimal Performance Marcelo G. S. Bruno (1) and José M. F. Moura (2) (1) Elect. Eng. Depart., University
Lecture 9: Classification, LDA
 Lecture 9: Classification, LDA Reading: Chapter 4 STATS 202: Data mining and analysis October 13, 2017 1 / 21 Review: Main strategy in Chapter 4 Find an estimate ˆP (Y X). Then, given an input x 0, we
Lecture 9: Classification, LDA Reading: Chapter 4 STATS 202: Data mining and analysis October 13, 2017 1 / 21 Review: Main strategy in Chapter 4 Find an estimate ˆP (Y X). Then, given an input x 0, we
EUSIPCO
 EUSIPCO 3 569736677 FULLY ISTRIBUTE SIGNAL ETECTION: APPLICATION TO COGNITIVE RAIO Franc Iutzeler Philippe Ciblat Telecom ParisTech, 46 rue Barrault 753 Paris, France email: firstnamelastname@telecom-paristechfr
EUSIPCO 3 569736677 FULLY ISTRIBUTE SIGNAL ETECTION: APPLICATION TO COGNITIVE RAIO Franc Iutzeler Philippe Ciblat Telecom ParisTech, 46 rue Barrault 753 Paris, France email: firstnamelastname@telecom-paristechfr
MCMC Sampling for Bayesian Inference using L1-type Priors
 MÜNSTER MCMC Sampling for Bayesian Inference using L1-type Priors (what I do whenever the ill-posedness of EEG/MEG is just not frustrating enough!) AG Imaging Seminar Felix Lucka 26.06.2012 , MÜNSTER Sampling
MÜNSTER MCMC Sampling for Bayesian Inference using L1-type Priors (what I do whenever the ill-posedness of EEG/MEG is just not frustrating enough!) AG Imaging Seminar Felix Lucka 26.06.2012 , MÜNSTER Sampling