Multiscale Adaptive Sensor Systems
|
|
|
- Sharon Adams
- 5 years ago
- Views:
Transcription
1 Multiscale Adaptive Sensor Systems Silvia Ferrari Sibley School of Mechanical and Aerospace Engineering Cornell University ONR Maritime Sensing D&I Review Naval Surface Warfare Center, Carderock 9-11 August 2016


![task { Search and Rescue [3] [2] [1] http://www.ibtimes.co.](/docs-images/95/123920938/images/2-4.jpg)

2 Introduction and Motivation Sensor planning: control reconfigurable sensors for collaborative gather information in contested communication environments { Tracking endangered species target control Sensor Model output [1] { Security surveillance task { Search and Rescue [3] [2] [1] [2] [3] 2
3 Information-driven sensor planning Literature Review { Information value comparison [Polcari 13, Kastella 97,... ] { Cell decomposition [Cai 09, Paull 10, Ferrari 09, 12,... ] { Probability road maps and trees [Zhang 09, Lu 10, 12, 14,... ] { Graphical model [Krause 06, 10, 12, Singh 09, Guestrin 05, Meliou 07, Srinivas 12, Le Ny 09,... ] { Advantage: a. Represent information value of measurements for improving the target model b. Can be calculated before measurements are obtained { Disadvantage: a. Can only be applied when target models are known b. Assumptions too restricted: stationary target; discrete and finite control space; unbounded sensor field of view; 3 unconstrained sensor dynamics,...
4 Problem Formulation

5 Assumptions sensor 5

6 Problem Formulation 6
7 Example
 or detailed prior information (perfect models) Consider networks in which some or all nodes (agents) may be disconnected some of the time, and there is")
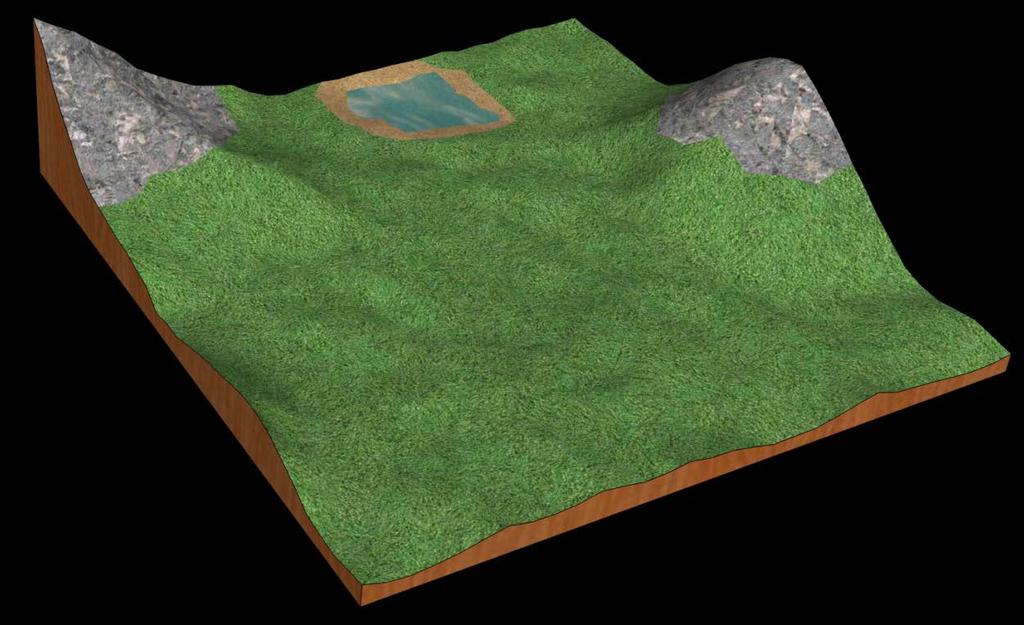
8 Information Sufficiency Motivation: Develop planning and control algorithms for collaborative networks with intermittent communications Existing decentralized optimization methods assume constant communications (network is a connected graph) or detailed prior information (perfect models) Consider networks in which some or all nodes (agents) may be disconnected some of the time, and there is no or little prior information (high uncertainty) Agents aim to construct probabilistic model from data Disconnected agents can determine when their own local information is insufficient, and it is time to reestablish communications Model a spatial phenomenon: T( F) Max temperature over a 2D ROI Time invariant Observable at a set of target locations: 8




9 Applications Robot Navigation Traffic Planning Animal Tracking Env. Monitor 1: 2: 3: 4: PRISM Climate Group, Oregon State University, created March
10 Model and Information Value Estimation of spatial phenomenon: estimation Measurements: f(x) ~ Gaussian process Gaussian process: f(x) ~ GP(µ(x), ψ(x 1,x 2 )); µ(x) = E[f(x)] ψ(x 1, x 2 ) = E[( f(x 1 ) µ(x 1 ) )( f(x 2 ) µ(x 2 ) )] Planning objective: at time k choose locations and measurements {y k,z k } to maximize, where, X T = [x 1 x r ], x i T, i = 1,, r ; Y k = [y 1 y k ]; Z k = [z 1 z k ] Since z k is unknown, optimize expected discrimination gain (EDG):
11 Methodology

12 Sensor Planning Framework 12


13 GP Regression Training output Test output Training input Test input 13



14 GP Regression Example Example: Fig. Ground truth Fig. GP regression result 14
 0 0 5 10 x (m) y (m) x (m) { Equivalently: single multi-output GP with diagonal covariance matrix function 15")
15 GP Target Kinematics Model : Target trajectory : Target initial position v x (m/s) 10 8 y (m) x (m) y (m) v y (m/s) x (m) y (m) x (m) { Equivalently: single multi-output GP with diagonal covariance matrix function 15


16 GP Information Value f (x) y x 16

17 GP-EKLD where 17


18 DPGP-EKLD 18
19 DPGP Particle Filter { Time update { Measurement update Target FOV Gaussian distribution Sample of target state 19



20 DPGP-EKLD Approximation Gaussian distribution 20
21 Methodology Part III: Sensor Planning Algorithms Model Update Targets Sensor System Measurements Target Model Control Input Estimated Target States Optimal Planner Objectives Information Value

22 Optimize DPGP-EKLD DPGP-EKLD optimization without sensor dynamics constraints DPGP-EKLD approximation: FOV Sweep line algorithm: segment tree 22

 0-2 -2 0 2")
23 Incorporate Sensor Dynamics DPGP-EKLD optimization with sensor dynamics constraints Linear sensor dynamics with constraints: Lower bound: Reward for observing j th target that follows i th VF: FOV 0 Multiple objective optimization -1 2 y (m) x (m)


24 Lexicographic Algorithm Objectives can be ordered by relative importance reorder Remaining iterations: Additional constraints: 24
25 Nominal Network Performance Let Σ denote the covariance matrix and Ψ(x, y) denote the cross-covariance matrix, then the GP average generalization error (AGE), 2 T ε ( k) = Ex Σ( x) Ψ( x, Yk ) Σ( Yk ) + δ I Ψ ( x, Yk ) represent a measure of GP performance. From the latest GP, the posterior covariance, and the network nominal AGE can be estimated from an assumed probability distribution for future measurement locations, and an assumed probability of detection p (b) t 1 [ ] 1 (a) average generalization error, ε(k) p t = 3/4 p t = 1 experimental ε(k) theoretical ε(k) p t = 1/25 p t = 1/ time step, k
26 AGE Communications
27 Communication Control Robot _ i Environment Random Policy Sensor (i) x n Buffer Sender (a) (a) Local GP Receiver Nominal GP Communication Control Approximate nominal average generalization error (AGE) from latest GP 18
28 Communication Control Robot _ i Environment Random Policy Sensor (i) x n Buffer Sender (a) (a) Local GP Receiver Nominal GP Communication Control Approximate nominal average generalization error (AGE) from latest GP Local GP (GPL) computation GPL is updated using local measurements (obtained by robot i) Actual AGE is calculated from the local covariance function. 18
29 Communication Control Robot _ i Environment Random Policy Sensor (i) x n Buffer Sender (a) (a) Local GP Receiver Nominal GP Communication Control Approximate nominal average generalization error (AGE) from latest GP Local GP (GPL) computation Communication time: at the n th time step, the i th robot communicates if max i n k = n ε ( k) ε ( k) > γ 0 i nominal where, is predefined performance threshold. γ 18
30 Communication Control Robot _ i Environment Random Policy Sensor (i) x n Buffer Sender (a) (a) Local GP Receiver Nominal GP Communication Control Approximate nominal average generalization error (AGE) from latest GP Local GP (GPL) computation Communication time Information sharing: all new measurements are communicated and used to update the robot GP 18
31 Communication Control Robot _ i Random Policy (a) Environment Sensor (i) x n Buffer Sender Actual AGE (robot i) Nominal AGE Receiver Robot _ j Environment Local GP Nominal GP Random Policy Sensor ( j) x n Communication Control Buffer (a) Sender average generalization error, ε(k) Current time step, k Local GP Receiver Nominal GP Communication Control 19
32 Communication Control Robot _ i Random Policy (a) Environment Sensor (i) x n Buffer Sender Actual AGE (robot i) Nominal AGE Receiver Robot _ j Environment Local GP Nominal GP Random Policy Sensor ( j) x n Communication Control Buffer (a) Sender average generalization error, ε(k) Current time step, k Local GP Receiver Nominal GP Communication Control 19
33 Communication Control Robot _ i Random Policy (a) Environment Sensor (i) x n Buffer Sender Actual AGE (robot i) Nominal AGE Receiver Robot _ j Environment Local GP Nominal GP Random Policy Sensor ( j) x n Communication Control Buffer (a) Sender average generalization error, ε(k) Current time step, k Local GP Receiver Nominal GP Communication Control 19
34 Communication Control Robot _ i Random Policy (a) Environment Sensor (i) x n Buffer Sender Actual AGE (robot i) Nominal AGE Receiver Robot _ j Environment Local GP Nominal GP Random Policy Sensor ( j) x n Communication Control Buffer (a) Sender average generalization error, ε(k) Current time step, k Local GP Receiver Nominal GP Communication Control 19
35 Simulation Results Modeling of a spatial phenomenon, g(x), by four robots with disjoint workspaces: W 1 W 2 y (Km) W 3 W 4 x (Km) 20
36 Conclusions Conclusion { Developed novel information theoretic functions for GP models of distributed spatio-temporal processes { Developed information-theoretic sensor planning algorithms for distributed networks with bounded fields of view { Developed AGE method for monitoring information sufficiency and schedule communications Future work { Extend information theoretic functions to partially observable targets { Extend information theoretic functions to decentralized control { Develop multiscale adaptive planners to uncertain environments 36
37 Thank you!
ONR Mine Warfare Autonomy Virtual Program Review September 7, 2017
 ONR Mine Warfare Autonomy Virtual Program Review September 7, 2017 Information-driven Guidance and Control for Adaptive Target Detection and Classification Silvia Ferrari Pingping Zhu and Bo Fu Mechanical
ONR Mine Warfare Autonomy Virtual Program Review September 7, 2017 Information-driven Guidance and Control for Adaptive Target Detection and Classification Silvia Ferrari Pingping Zhu and Bo Fu Mechanical
Mathematical Formulation of Our Example
 Mathematical Formulation of Our Example We define two binary random variables: open and, where is light on or light off. Our question is: What is? Computer Vision 1 Combining Evidence Suppose our robot
Mathematical Formulation of Our Example We define two binary random variables: open and, where is light on or light off. Our question is: What is? Computer Vision 1 Combining Evidence Suppose our robot
Partially Observable Markov Decision Processes (POMDPs)
") Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
PILCO: A Model-Based and Data-Efficient Approach to Policy Search
 PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
Multi-scale Adaptive Sensor Systems Silvia Ferrari, Professor Mechanical and Aerospace Engineering Cornell University
 ONR Maritime Sensing - Discovery & Invention (D&I) Review Naval Surface Warfare Center, Carderock (MD) August 21-23, 2018 Multi-scale Adaptive Sensor Systems Silvia Ferrari, Professor Mechanical and Aerospace
ONR Maritime Sensing - Discovery & Invention (D&I) Review Naval Surface Warfare Center, Carderock (MD) August 21-23, 2018 Multi-scale Adaptive Sensor Systems Silvia Ferrari, Professor Mechanical and Aerospace
Probability Map Building of Uncertain Dynamic Environments with Indistinguishable Obstacles
 Probability Map Building of Uncertain Dynamic Environments with Indistinguishable Obstacles Myungsoo Jun and Raffaello D Andrea Sibley School of Mechanical and Aerospace Engineering Cornell University
Probability Map Building of Uncertain Dynamic Environments with Indistinguishable Obstacles Myungsoo Jun and Raffaello D Andrea Sibley School of Mechanical and Aerospace Engineering Cornell University
Robotics 2 Target Tracking. Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard
 Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
Gaussian Processes. 1 What problems can be solved by Gaussian Processes?
 Statistical Techniques in Robotics (16-831, F1) Lecture#19 (Wednesday November 16) Gaussian Processes Lecturer: Drew Bagnell Scribe:Yamuna Krishnamurthy 1 1 What problems can be solved by Gaussian Processes?
Statistical Techniques in Robotics (16-831, F1) Lecture#19 (Wednesday November 16) Gaussian Processes Lecturer: Drew Bagnell Scribe:Yamuna Krishnamurthy 1 1 What problems can be solved by Gaussian Processes?
Planning Under Uncertainty II
 Planning Under Uncertainty II Intelligent Robotics 2014/15 Bruno Lacerda Announcement No class next Monday - 17/11/2014 2 Previous Lecture Approach to cope with uncertainty on outcome of actions Markov
Planning Under Uncertainty II Intelligent Robotics 2014/15 Bruno Lacerda Announcement No class next Monday - 17/11/2014 2 Previous Lecture Approach to cope with uncertainty on outcome of actions Markov
Statistical Techniques in Robotics (16-831, F12) Lecture#20 (Monday November 12) Gaussian Processes
 Lecture#20 (Monday November 12) Gaussian Processes") Statistical Techniques in Robotics (6-83, F) Lecture# (Monday November ) Gaussian Processes Lecturer: Drew Bagnell Scribe: Venkatraman Narayanan Applications of Gaussian Processes (a) Inverse Kinematics
Statistical Techniques in Robotics (6-83, F) Lecture# (Monday November ) Gaussian Processes Lecturer: Drew Bagnell Scribe: Venkatraman Narayanan Applications of Gaussian Processes (a) Inverse Kinematics
Partially Observable Markov Decision Processes (POMDPs) Pieter Abbeel UC Berkeley EECS
 Pieter Abbeel UC Berkeley EECS") Partially Observable Markov Decision Processes (POMDPs) Pieter Abbeel UC Berkeley EECS Many slides adapted from Jur van den Berg Outline POMDPs Separation Principle / Certainty Equivalence Locally Optimal
Partially Observable Markov Decision Processes (POMDPs) Pieter Abbeel UC Berkeley EECS Many slides adapted from Jur van den Berg Outline POMDPs Separation Principle / Certainty Equivalence Locally Optimal
Robotics 2 Target Tracking. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
Statistical Techniques in Robotics (16-831, F12) Lecture#21 (Monday November 12) Gaussian Processes
 Lecture#21 (Monday November 12) Gaussian Processes") Statistical Techniques in Robotics (16-831, F12) Lecture#21 (Monday November 12) Gaussian Processes Lecturer: Drew Bagnell Scribe: Venkatraman Narayanan 1, M. Koval and P. Parashar 1 Applications of Gaussian
Statistical Techniques in Robotics (16-831, F12) Lecture#21 (Monday November 12) Gaussian Processes Lecturer: Drew Bagnell Scribe: Venkatraman Narayanan 1, M. Koval and P. Parashar 1 Applications of Gaussian
Robot Localization and Kalman Filters
 Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Information Value in Nonparametric Dirichlet-Process Gaussian-Process (DPGP) Mixture Models
 Mixture Models") Information Value in Nonparametric Dirichlet-Process Gaussian-Process (DPGP) Mixture Models Hongchuan Wei, Wenjie Lu, Pingping Zhu, Silvia Ferrari, Miao Liu, Robert H. Klein, Shayegan Omidshafiei, Jonathan
Information Value in Nonparametric Dirichlet-Process Gaussian-Process (DPGP) Mixture Models Hongchuan Wei, Wenjie Lu, Pingping Zhu, Silvia Ferrari, Miao Liu, Robert H. Klein, Shayegan Omidshafiei, Jonathan
Expectation Propagation in Dynamical Systems
 Expectation Propagation in Dynamical Systems Marc Peter Deisenroth Joint Work with Shakir Mohamed (UBC) August 10, 2012 Marc Deisenroth (TU Darmstadt) EP in Dynamical Systems 1 Motivation Figure : Complex
Expectation Propagation in Dynamical Systems Marc Peter Deisenroth Joint Work with Shakir Mohamed (UBC) August 10, 2012 Marc Deisenroth (TU Darmstadt) EP in Dynamical Systems 1 Motivation Figure : Complex
Probabilistic Graphical Models (I)
") Probabilistic Graphical Models (I) Hongxin Zhang zhx@cad.zju.edu.cn State Key Lab of CAD&CG, ZJU 2015-03-31 Probabilistic Graphical Models Modeling many real-world problems => a large number of random
Probabilistic Graphical Models (I) Hongxin Zhang zhx@cad.zju.edu.cn State Key Lab of CAD&CG, ZJU 2015-03-31 Probabilistic Graphical Models Modeling many real-world problems => a large number of random
9 Forward-backward algorithm, sum-product on factor graphs
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.438 Algorithms For Inference Fall 2014 9 Forward-backward algorithm, sum-product on factor graphs The previous
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.438 Algorithms For Inference Fall 2014 9 Forward-backward algorithm, sum-product on factor graphs The previous
The Belief Roadmap: Efficient Planning in Belief Space by Factoring the Covariance. Samuel Prentice and Nicholas Roy Presentation by Elaine Short
 The Belief Roadmap: Efficient Planning in Belief Space by Factoring the Covariance Samuel Prentice and Nicholas Roy Presentation by Elaine Short 1 Outline" Motivation Review of PRM and EKF Factoring the
The Belief Roadmap: Efficient Planning in Belief Space by Factoring the Covariance Samuel Prentice and Nicholas Roy Presentation by Elaine Short 1 Outline" Motivation Review of PRM and EKF Factoring the
Distributed Data Fusion with Kalman Filters. Simon Julier Computer Science Department University College London
 Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
Context Driven Tracking using Particle Filters
 18th International Conference on Information Fusion Washington, DC - July 6-9, 2015 Context Driven Tracking using Particle Filters Rik Claessens, Gregor Pavlin and Patrick de Oude University of Liverpool,
18th International Conference on Information Fusion Washington, DC - July 6-9, 2015 Context Driven Tracking using Particle Filters Rik Claessens, Gregor Pavlin and Patrick de Oude University of Liverpool,
Multi-Robotic Systems
 CHAPTER 9 Multi-Robotic Systems The topic of multi-robotic systems is quite popular now. It is believed that such systems can have the following benefits: Improved performance ( winning by numbers ) Distributed
CHAPTER 9 Multi-Robotic Systems The topic of multi-robotic systems is quite popular now. It is believed that such systems can have the following benefits: Improved performance ( winning by numbers ) Distributed
Chris Bishop s PRML Ch. 8: Graphical Models
 Chris Bishop s PRML Ch. 8: Graphical Models January 24, 2008 Introduction Visualize the structure of a probabilistic model Design and motivate new models Insights into the model s properties, in particular
Chris Bishop s PRML Ch. 8: Graphical Models January 24, 2008 Introduction Visualize the structure of a probabilistic model Design and motivate new models Insights into the model s properties, in particular
AASS, Örebro University
 Mobile Robotics Achim J. and Lilienthal Olfaction Lab, AASS, Örebro University 1 Contents 1. Gas-Sensitive Mobile Robots in the Real World 2. Gas Dispersal in Natural Environments 3. Gas Quantification
Mobile Robotics Achim J. and Lilienthal Olfaction Lab, AASS, Örebro University 1 Contents 1. Gas-Sensitive Mobile Robots in the Real World 2. Gas Dispersal in Natural Environments 3. Gas Quantification
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
Introduction to Reinforcement Learning. CMPT 882 Mar. 18
 Introduction to Reinforcement Learning CMPT 882 Mar. 18 Outline for the week Basic ideas in RL Value functions and value iteration Policy evaluation and policy improvement Model-free RL Monte-Carlo and
Introduction to Reinforcement Learning CMPT 882 Mar. 18 Outline for the week Basic ideas in RL Value functions and value iteration Policy evaluation and policy improvement Model-free RL Monte-Carlo and
Linear Dynamical Systems
 Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
A RAIN PIXEL RESTORATION ALGORITHM FOR VIDEOS WITH DYNAMIC SCENES
 A RAIN PIXEL RESTORATION ALGORITHM FOR VIDEOS WITH DYNAMIC SCENES V.Sridevi, P.Malarvizhi, P.Mathivannan Abstract Rain removal from a video is a challenging problem due to random spatial distribution and
A RAIN PIXEL RESTORATION ALGORITHM FOR VIDEOS WITH DYNAMIC SCENES V.Sridevi, P.Malarvizhi, P.Mathivannan Abstract Rain removal from a video is a challenging problem due to random spatial distribution and
Lecture 8: Kinematics: Path and Trajectory Planning
 Lecture 8: Kinematics: Path and Trajectory Planning Concept of Configuration Space c Anton Shiriaev. 5EL158: Lecture 8 p. 1/20 Lecture 8: Kinematics: Path and Trajectory Planning Concept of Configuration
Lecture 8: Kinematics: Path and Trajectory Planning Concept of Configuration Space c Anton Shiriaev. 5EL158: Lecture 8 p. 1/20 Lecture 8: Kinematics: Path and Trajectory Planning Concept of Configuration
CS599 Lecture 1 Introduction To RL
 CS599 Lecture 1 Introduction To RL Reinforcement Learning Introduction Learning from rewards Policies Value Functions Rewards Models of the Environment Exploitation vs. Exploration Dynamic Programming
CS599 Lecture 1 Introduction To RL Reinforcement Learning Introduction Learning from rewards Policies Value Functions Rewards Models of the Environment Exploitation vs. Exploration Dynamic Programming
Gaussian Processes. Le Song. Machine Learning II: Advanced Topics CSE 8803ML, Spring 2012
 Gaussian Processes Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 01 Pictorial view of embedding distribution Transform the entire distribution to expected features Feature space Feature
Gaussian Processes Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 01 Pictorial view of embedding distribution Transform the entire distribution to expected features Feature space Feature
The Particle Filter. PD Dr. Rudolph Triebel Computer Vision Group. Machine Learning for Computer Vision
 The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
Tracking and Identification of Multiple targets
 Tracking and Identification of Multiple targets Samir Hachour, François Delmotte, Eric Lefèvre, David Mercier Laboratoire de Génie Informatique et d'automatique de l'artois, EA 3926 LGI2A first name.last
Tracking and Identification of Multiple targets Samir Hachour, François Delmotte, Eric Lefèvre, David Mercier Laboratoire de Génie Informatique et d'automatique de l'artois, EA 3926 LGI2A first name.last
Uncertainty Quantification in Performance Evaluation of Manufacturing Processes
 Uncertainty Quantification in Performance Evaluation of Manufacturing Processes Manufacturing Systems October 27, 2014 Saideep Nannapaneni, Sankaran Mahadevan Vanderbilt University, Nashville, TN Acknowledgement
Uncertainty Quantification in Performance Evaluation of Manufacturing Processes Manufacturing Systems October 27, 2014 Saideep Nannapaneni, Sankaran Mahadevan Vanderbilt University, Nashville, TN Acknowledgement
SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters
 SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters Matthew Walter 1,2, Franz Hover 1, & John Leonard 1,2 Massachusetts Institute of Technology 1 Department of Mechanical Engineering
SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters Matthew Walter 1,2, Franz Hover 1, & John Leonard 1,2 Massachusetts Institute of Technology 1 Department of Mechanical Engineering
Pose tracking of magnetic objects
 Pose tracking of magnetic objects Niklas Wahlström Department of Information Technology, Uppsala University, Sweden Novmber 13, 2017 niklas.wahlstrom@it.uu.se Seminar Vi2 Short about me 2005-2010: Applied
Pose tracking of magnetic objects Niklas Wahlström Department of Information Technology, Uppsala University, Sweden Novmber 13, 2017 niklas.wahlstrom@it.uu.se Seminar Vi2 Short about me 2005-2010: Applied
Markov decision processes
 CS 2740 Knowledge representation Lecture 24 Markov decision processes Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Administrative announcements Final exam: Monday, December 8, 2008 In-class Only
CS 2740 Knowledge representation Lecture 24 Markov decision processes Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Administrative announcements Final exam: Monday, December 8, 2008 In-class Only
A Decentralized Approach to Multi-agent Planning in the Presence of Constraints and Uncertainty
 2011 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-13, 2011, Shanghai, China A Decentralized Approach to Multi-agent Planning in the Presence of
2011 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-13, 2011, Shanghai, China A Decentralized Approach to Multi-agent Planning in the Presence of
Decision Theory: Markov Decision Processes
 Decision Theory: Markov Decision Processes CPSC 322 Lecture 33 March 31, 2006 Textbook 12.5 Decision Theory: Markov Decision Processes CPSC 322 Lecture 33, Slide 1 Lecture Overview Recap Rewards and Policies
Decision Theory: Markov Decision Processes CPSC 322 Lecture 33 March 31, 2006 Textbook 12.5 Decision Theory: Markov Decision Processes CPSC 322 Lecture 33, Slide 1 Lecture Overview Recap Rewards and Policies
Anytime Planning for Decentralized Multi-Robot Active Information Gathering
 Anytime Planning for Decentralized Multi-Robot Active Information Gathering Brent Schlotfeldt 1 Dinesh Thakur 1 Nikolay Atanasov 2 Vijay Kumar 1 George Pappas 1 1 GRASP Laboratory University of Pennsylvania
Anytime Planning for Decentralized Multi-Robot Active Information Gathering Brent Schlotfeldt 1 Dinesh Thakur 1 Nikolay Atanasov 2 Vijay Kumar 1 George Pappas 1 1 GRASP Laboratory University of Pennsylvania
Mutual Information Based Data Selection in Gaussian Processes for People Tracking
 Proceedings of Australasian Conference on Robotics and Automation, 3-5 Dec 01, Victoria University of Wellington, New Zealand. Mutual Information Based Data Selection in Gaussian Processes for People Tracking
Proceedings of Australasian Conference on Robotics and Automation, 3-5 Dec 01, Victoria University of Wellington, New Zealand. Mutual Information Based Data Selection in Gaussian Processes for People Tracking
Template-Based Representations. Sargur Srihari
 Template-Based Representations Sargur srihari@cedar.buffalo.edu 1 Topics Variable-based vs Template-based Temporal Models Basic Assumptions Dynamic Bayesian Networks Hidden Markov Models Linear Dynamical
Template-Based Representations Sargur srihari@cedar.buffalo.edu 1 Topics Variable-based vs Template-based Temporal Models Basic Assumptions Dynamic Bayesian Networks Hidden Markov Models Linear Dynamical
MARKOV DECISION PROCESSES (MDP) AND REINFORCEMENT LEARNING (RL) Versione originale delle slide fornita dal Prof. Francesco Lo Presti
 AND REINFORCEMENT LEARNING (RL) Versione originale delle slide fornita dal Prof. Francesco Lo Presti") 1 MARKOV DECISION PROCESSES (MDP) AND REINFORCEMENT LEARNING (RL) Versione originale delle slide fornita dal Prof. Francesco Lo Presti Historical background 2 Original motivation: animal learning Early
1 MARKOV DECISION PROCESSES (MDP) AND REINFORCEMENT LEARNING (RL) Versione originale delle slide fornita dal Prof. Francesco Lo Presti Historical background 2 Original motivation: animal learning Early
Introduction to Graphical Models
 Introduction to Graphical Models The 15 th Winter School of Statistical Physics POSCO International Center & POSTECH, Pohang 2018. 1. 9 (Tue.) Yung-Kyun Noh GENERALIZATION FOR PREDICTION 2 Probabilistic
Introduction to Graphical Models The 15 th Winter School of Statistical Physics POSCO International Center & POSTECH, Pohang 2018. 1. 9 (Tue.) Yung-Kyun Noh GENERALIZATION FOR PREDICTION 2 Probabilistic
Generalization and Function Approximation
 Generalization and Function Approximation 0 Generalization and Function Approximation Suggested reading: Chapter 8 in R. S. Sutton, A. G. Barto: Reinforcement Learning: An Introduction MIT Press, 1998.
Generalization and Function Approximation 0 Generalization and Function Approximation Suggested reading: Chapter 8 in R. S. Sutton, A. G. Barto: Reinforcement Learning: An Introduction MIT Press, 1998.
Factor Analysis and Kalman Filtering (11/2/04)
") CS281A/Stat241A: Statistical Learning Theory Factor Analysis and Kalman Filtering (11/2/04) Lecturer: Michael I. Jordan Scribes: Byung-Gon Chun and Sunghoon Kim 1 Factor Analysis Factor analysis is used
CS281A/Stat241A: Statistical Learning Theory Factor Analysis and Kalman Filtering (11/2/04) Lecturer: Michael I. Jordan Scribes: Byung-Gon Chun and Sunghoon Kim 1 Factor Analysis Factor analysis is used
Scalable robust hypothesis tests using graphical models
 Scalable robust hypothesis tests using graphical models Umamahesh Srinivas ipal Group Meeting October 22, 2010 Binary hypothesis testing problem Random vector x = (x 1,...,x n ) R n generated from either
Scalable robust hypothesis tests using graphical models Umamahesh Srinivas ipal Group Meeting October 22, 2010 Binary hypothesis testing problem Random vector x = (x 1,...,x n ) R n generated from either
Novel Quantization Strategies for Linear Prediction with Guarantees
 Novel Novel for Linear Simon Du 1/10 Yichong Xu Yuan Li Aarti Zhang Singh Pulkit Background Motivation: Brain Computer Interface (BCI). Predict whether an individual is trying to move his hand towards
Novel Novel for Linear Simon Du 1/10 Yichong Xu Yuan Li Aarti Zhang Singh Pulkit Background Motivation: Brain Computer Interface (BCI). Predict whether an individual is trying to move his hand towards
Neuromorphic Sensing and Control of Autonomous Micro-Aerial Vehicles
 Neuromorphic Sensing and Control of Autonomous Micro-Aerial Vehicles Commercialization Fellowship Technical Presentation Taylor Clawson Ithaca, NY June 12, 2018 About Me: Taylor Clawson 3 rd year PhD student
Neuromorphic Sensing and Control of Autonomous Micro-Aerial Vehicles Commercialization Fellowship Technical Presentation Taylor Clawson Ithaca, NY June 12, 2018 About Me: Taylor Clawson 3 rd year PhD student
The Use of Short-Arc Angle and Angle Rate Data for Deep-Space Initial Orbit Determination and Track Association
 The Use of Short-Arc Angle and Angle Rate Data for Deep-Space Initial Orbit Determination and Track Association Dr. Moriba Jah (AFRL) Mr. Kyle DeMars (UT-Austin) Dr. Paul Schumacher Jr. (AFRL) Background/Motivation
The Use of Short-Arc Angle and Angle Rate Data for Deep-Space Initial Orbit Determination and Track Association Dr. Moriba Jah (AFRL) Mr. Kyle DeMars (UT-Austin) Dr. Paul Schumacher Jr. (AFRL) Background/Motivation
A Probabilistic Relational Model for Characterizing Situations in Dynamic Multi-Agent Systems
 A Probabilistic Relational Model for Characterizing Situations in Dynamic Multi-Agent Systems Daniel Meyer-Delius 1, Christian Plagemann 1, Georg von Wichert 2, Wendelin Feiten 2, Gisbert Lawitzky 2, and
A Probabilistic Relational Model for Characterizing Situations in Dynamic Multi-Agent Systems Daniel Meyer-Delius 1, Christian Plagemann 1, Georg von Wichert 2, Wendelin Feiten 2, Gisbert Lawitzky 2, and
c 4, < y 2, 1 0, otherwise,
 Fundamentals of Big Data Analytics Univ.-Prof. Dr. rer. nat. Rudolf Mathar Problem. Probability theory: The outcome of an experiment is described by three events A, B and C. The probabilities Pr(A) =,
Fundamentals of Big Data Analytics Univ.-Prof. Dr. rer. nat. Rudolf Mathar Problem. Probability theory: The outcome of an experiment is described by three events A, B and C. The probabilities Pr(A) =,
Uncertainty Quantification for Machine Learning and Statistical Models
 Uncertainty Quantification for Machine Learning and Statistical Models David J. Stracuzzi Joint work with: Max Chen, Michael Darling, Stephen Dauphin, Matt Peterson, and Chris Young Sandia National Laboratories
Uncertainty Quantification for Machine Learning and Statistical Models David J. Stracuzzi Joint work with: Max Chen, Michael Darling, Stephen Dauphin, Matt Peterson, and Chris Young Sandia National Laboratories
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Time-Varying Parameters
 Kalman Filter and state-space models: time-varying parameter models; models with unobservable variables; basic tool: Kalman filter; implementation is task-specific. y t = x t β t + e t (1) β t = µ + Fβ
Kalman Filter and state-space models: time-varying parameter models; models with unobservable variables; basic tool: Kalman filter; implementation is task-specific. y t = x t β t + e t (1) β t = µ + Fβ
CS Machine Learning Qualifying Exam
 CS Machine Learning Qualifying Exam Georgia Institute of Technology March 30, 2017 The exam is divided into four areas: Core, Statistical Methods and Models, Learning Theory, and Decision Processes. There
CS Machine Learning Qualifying Exam Georgia Institute of Technology March 30, 2017 The exam is divided into four areas: Core, Statistical Methods and Models, Learning Theory, and Decision Processes. There
Intelligent Systems:
 Intelligent Systems: Undirected Graphical models (Factor Graphs) (2 lectures) Carsten Rother 15/01/2015 Intelligent Systems: Probabilistic Inference in DGM and UGM Roadmap for next two lectures Definition
Intelligent Systems: Undirected Graphical models (Factor Graphs) (2 lectures) Carsten Rother 15/01/2015 Intelligent Systems: Probabilistic Inference in DGM and UGM Roadmap for next two lectures Definition
Probabilistic Graphical Models
 Probabilistic Graphical Models Brown University CSCI 295-P, Spring 213 Prof. Erik Sudderth Lecture 11: Inference & Learning Overview, Gaussian Graphical Models Some figures courtesy Michael Jordan s draft
Probabilistic Graphical Models Brown University CSCI 295-P, Spring 213 Prof. Erik Sudderth Lecture 11: Inference & Learning Overview, Gaussian Graphical Models Some figures courtesy Michael Jordan s draft
Joint GPS and Vision Estimation Using an Adaptive Filter
 1 Joint GPS and Vision Estimation Using an Adaptive Filter Shubhendra Vikram Singh Chauhan and Grace Xingxin Gao, University of Illinois at Urbana-Champaign Shubhendra Vikram Singh Chauhan received his
1 Joint GPS and Vision Estimation Using an Adaptive Filter Shubhendra Vikram Singh Chauhan and Grace Xingxin Gao, University of Illinois at Urbana-Champaign Shubhendra Vikram Singh Chauhan received his
Statistical Perspectives on Geographic Information Science. Michael F. Goodchild University of California Santa Barbara
 Statistical Perspectives on Geographic Information Science Michael F. Goodchild University of California Santa Barbara Statistical geometry Geometric phenomena subject to chance spatial phenomena emphasis
Statistical Perspectives on Geographic Information Science Michael F. Goodchild University of California Santa Barbara Statistical geometry Geometric phenomena subject to chance spatial phenomena emphasis
10 Robotic Exploration and Information Gathering
 NAVARCH/EECS 568, ROB 530 - Winter 2018 10 Robotic Exploration and Information Gathering Maani Ghaffari April 2, 2018 Robotic Information Gathering: Exploration and Monitoring In information gathering
NAVARCH/EECS 568, ROB 530 - Winter 2018 10 Robotic Exploration and Information Gathering Maani Ghaffari April 2, 2018 Robotic Information Gathering: Exploration and Monitoring In information gathering
Active Learning of Gaussian Processes for Spatial Functions in Mobile Sensor Networks
 Preprints of the 8th IFAC World Congress Milano (Italy) August 8 - September, Active Learning of Gaussian Processes for Spatial Functions in Mobile Sensor Networks Dongbing Gu Huosheng Hu University of
Preprints of the 8th IFAC World Congress Milano (Italy) August 8 - September, Active Learning of Gaussian Processes for Spatial Functions in Mobile Sensor Networks Dongbing Gu Huosheng Hu University of
Manipulators. Robotics. Outline. Non-holonomic robots. Sensors. Mobile Robots
 Manipulators P obotics Configuration of robot specified by 6 numbers 6 degrees of freedom (DOF) 6 is the minimum number required to position end-effector arbitrarily. For dynamical systems, add velocity
Manipulators P obotics Configuration of robot specified by 6 numbers 6 degrees of freedom (DOF) 6 is the minimum number required to position end-effector arbitrarily. For dynamical systems, add velocity
Complexity Metrics. ICRAT Tutorial on Airborne self separation in air transportation Budapest, Hungary June 1, 2010.
 Complexity Metrics ICRAT Tutorial on Airborne self separation in air transportation Budapest, Hungary June 1, 2010 Outline Introduction and motivation The notion of air traffic complexity Relevant characteristics
Complexity Metrics ICRAT Tutorial on Airborne self separation in air transportation Budapest, Hungary June 1, 2010 Outline Introduction and motivation The notion of air traffic complexity Relevant characteristics
Efficient Information Planning in Graphical Models
 Efficient Information Planning in Graphical Models computational complexity considerations John Fisher & Giorgos Papachristoudis, MIT VITALITE Annual Review 2013 September 9, 2013 J. Fisher (VITALITE Annual
Efficient Information Planning in Graphical Models computational complexity considerations John Fisher & Giorgos Papachristoudis, MIT VITALITE Annual Review 2013 September 9, 2013 J. Fisher (VITALITE Annual
Lecture 7: Optimal Smoothing
 Department of Biomedical Engineering and Computational Science Aalto University March 17, 2011 Contents 1 What is Optimal Smoothing? 2 Bayesian Optimal Smoothing Equations 3 Rauch-Tung-Striebel Smoother
Department of Biomedical Engineering and Computational Science Aalto University March 17, 2011 Contents 1 What is Optimal Smoothing? 2 Bayesian Optimal Smoothing Equations 3 Rauch-Tung-Striebel Smoother
Towards Uncertainty-Aware Path Planning On Road Networks Using Augmented-MDPs. Lorenzo Nardi and Cyrill Stachniss
 Towards Uncertainty-Aware Path Planning On Road Networks Using Augmented-MDPs Lorenzo Nardi and Cyrill Stachniss Navigation under uncertainty C B C B A A 2 `B` is the most likely position C B C B A A 3
Towards Uncertainty-Aware Path Planning On Road Networks Using Augmented-MDPs Lorenzo Nardi and Cyrill Stachniss Navigation under uncertainty C B C B A A 2 `B` is the most likely position C B C B A A 3
Towards Fully-automated Driving
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, postdoc, project manager, software engineer,
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, postdoc, project manager, software engineer,
Probabilistic Cardinal Direction Queries On Spatio-Temporal Data
 Probabilistic Cardinal Direction Queries On Spatio-Temporal Data Ganesh Viswanathan Midterm Project Report CIS 6930 Data Science: Large-Scale Advanced Data Analytics University of Florida September 3 rd,
Probabilistic Cardinal Direction Queries On Spatio-Temporal Data Ganesh Viswanathan Midterm Project Report CIS 6930 Data Science: Large-Scale Advanced Data Analytics University of Florida September 3 rd,
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
Reinforcement Learning with Reference Tracking Control in Continuous State Spaces
 Reinforcement Learning with Reference Tracking Control in Continuous State Spaces Joseph Hall, Carl Edward Rasmussen and Jan Maciejowski Abstract The contribution described in this paper is an algorithm
Reinforcement Learning with Reference Tracking Control in Continuous State Spaces Joseph Hall, Carl Edward Rasmussen and Jan Maciejowski Abstract The contribution described in this paper is an algorithm
Title: Robust Path Planning in GPS-Denied Environments Using the Gaussian Augmented Markov Decision Process
 Title: Robust Path Planning in GPS-Denied Environments Using the Gaussian Augmented Markov Decision Process Authors: Peter Lommel (Corresponding author) 366 Technology Drive Minneapolis, MN 55418 phlommel@alum.mit.edu
Title: Robust Path Planning in GPS-Denied Environments Using the Gaussian Augmented Markov Decision Process Authors: Peter Lommel (Corresponding author) 366 Technology Drive Minneapolis, MN 55418 phlommel@alum.mit.edu
Path Integral Stochastic Optimal Control for Reinforcement Learning
 Preprint August 3, 204 The st Multidisciplinary Conference on Reinforcement Learning and Decision Making RLDM203 Path Integral Stochastic Optimal Control for Reinforcement Learning Farbod Farshidian Institute
Preprint August 3, 204 The st Multidisciplinary Conference on Reinforcement Learning and Decision Making RLDM203 Path Integral Stochastic Optimal Control for Reinforcement Learning Farbod Farshidian Institute
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
Sensor Localization and Target Estimation in Visual Sensor Networks
 Annual Schedule of my Research Sensor Localization and Target Estimation in Visual Sensor Networks Survey and Problem Settings Presented in the FL seminar on May th First Trial and Evaluation of Proposed
Annual Schedule of my Research Sensor Localization and Target Estimation in Visual Sensor Networks Survey and Problem Settings Presented in the FL seminar on May th First Trial and Evaluation of Proposed
Kalman Filter Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Learning to Control an Octopus Arm with Gaussian Process Temporal Difference Methods
 Learning to Control an Octopus Arm with Gaussian Process Temporal Difference Methods Yaakov Engel Joint work with Peter Szabo and Dmitry Volkinshtein (ex. Technion) Why use GPs in RL? A Bayesian approach
Learning to Control an Octopus Arm with Gaussian Process Temporal Difference Methods Yaakov Engel Joint work with Peter Szabo and Dmitry Volkinshtein (ex. Technion) Why use GPs in RL? A Bayesian approach
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Deep Reinforcement Learning. STAT946 Deep Learning Guest Lecture by Pascal Poupart University of Waterloo October 19, 2017
 Deep Reinforcement Learning STAT946 Deep Learning Guest Lecture by Pascal Poupart University of Waterloo October 19, 2017 Outline Introduction to Reinforcement Learning AlphaGo (Deep RL for Computer Go)
Deep Reinforcement Learning STAT946 Deep Learning Guest Lecture by Pascal Poupart University of Waterloo October 19, 2017 Outline Introduction to Reinforcement Learning AlphaGo (Deep RL for Computer Go)
Dialogue as a Decision Making Process
 Dialogue as a Decision Making Process Nicholas Roy Challenges of Autonomy in the Real World Wide range of sensors Noisy sensors World dynamics Adaptability Incomplete information Robustness under uncertainty
Dialogue as a Decision Making Process Nicholas Roy Challenges of Autonomy in the Real World Wide range of sensors Noisy sensors World dynamics Adaptability Incomplete information Robustness under uncertainty
Model-Based Reinforcement Learning with Continuous States and Actions
 Marc P. Deisenroth, Carl E. Rasmussen, and Jan Peters: Model-Based Reinforcement Learning with Continuous States and Actions in Proceedings of the 16th European Symposium on Artificial Neural Networks
Marc P. Deisenroth, Carl E. Rasmussen, and Jan Peters: Model-Based Reinforcement Learning with Continuous States and Actions in Proceedings of the 16th European Symposium on Artificial Neural Networks
Dynamic Data Modeling, Recognition, and Synthesis. Rui Zhao Thesis Defense Advisor: Professor Qiang Ji
 Dynamic Data Modeling, Recognition, and Synthesis Rui Zhao Thesis Defense Advisor: Professor Qiang Ji Contents Introduction Related Work Dynamic Data Modeling & Analysis Temporal localization Insufficient
Dynamic Data Modeling, Recognition, and Synthesis Rui Zhao Thesis Defense Advisor: Professor Qiang Ji Contents Introduction Related Work Dynamic Data Modeling & Analysis Temporal localization Insufficient
Pattern Recognition and Machine Learning
 Christopher M. Bishop Pattern Recognition and Machine Learning ÖSpri inger Contents Preface Mathematical notation Contents vii xi xiii 1 Introduction 1 1.1 Example: Polynomial Curve Fitting 4 1.2 Probability
Christopher M. Bishop Pattern Recognition and Machine Learning ÖSpri inger Contents Preface Mathematical notation Contents vii xi xiii 1 Introduction 1 1.1 Example: Polynomial Curve Fitting 4 1.2 Probability
Machine Learning Lecture 7
 Course Outline Machine Learning Lecture 7 Fundamentals (2 weeks) Bayes Decision Theory Probability Density Estimation Statistical Learning Theory 23.05.2016 Discriminative Approaches (5 weeks) Linear Discriminant
Course Outline Machine Learning Lecture 7 Fundamentals (2 weeks) Bayes Decision Theory Probability Density Estimation Statistical Learning Theory 23.05.2016 Discriminative Approaches (5 weeks) Linear Discriminant
Shape Outlier Detection Using Pose Preserving Dynamic Shape Models
 Shape Outlier Detection Using Pose Preserving Dynamic Shape Models Chan-Su Lee and Ahmed Elgammal Rutgers, The State University of New Jersey Department of Computer Science Outline Introduction Shape Outlier
Shape Outlier Detection Using Pose Preserving Dynamic Shape Models Chan-Su Lee and Ahmed Elgammal Rutgers, The State University of New Jersey Department of Computer Science Outline Introduction Shape Outlier
Human-Oriented Robotics. Temporal Reasoning. Kai Arras Social Robotics Lab, University of Freiburg
 Temporal Reasoning Kai Arras, University of Freiburg 1 Temporal Reasoning Contents Introduction Temporal Reasoning Hidden Markov Models Linear Dynamical Systems (LDS) Kalman Filter 2 Temporal Reasoning
Temporal Reasoning Kai Arras, University of Freiburg 1 Temporal Reasoning Contents Introduction Temporal Reasoning Hidden Markov Models Linear Dynamical Systems (LDS) Kalman Filter 2 Temporal Reasoning
Copyrighted Material. 1.1 Large-Scale Interconnected Dynamical Systems
 Chapter One Introduction 1.1 Large-Scale Interconnected Dynamical Systems Modern complex dynamical systems 1 are highly interconnected and mutually interdependent, both physically and through a multitude
Chapter One Introduction 1.1 Large-Scale Interconnected Dynamical Systems Modern complex dynamical systems 1 are highly interconnected and mutually interdependent, both physically and through a multitude
The geometry of Gaussian processes and Bayesian optimization. Contal CMLA, ENS Cachan
 The geometry of Gaussian processes and Bayesian optimization. Contal CMLA, ENS Cachan Background: Global Optimization and Gaussian Processes The Geometry of Gaussian Processes and the Chaining Trick Algorithm
The geometry of Gaussian processes and Bayesian optimization. Contal CMLA, ENS Cachan Background: Global Optimization and Gaussian Processes The Geometry of Gaussian Processes and the Chaining Trick Algorithm
Graphical Models for Collaborative Filtering
 Graphical Models for Collaborative Filtering Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 2012 Sequence modeling HMM, Kalman Filter, etc.: Similarity: the same graphical model topology,
Graphical Models for Collaborative Filtering Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 2012 Sequence modeling HMM, Kalman Filter, etc.: Similarity: the same graphical model topology,
Terrain Navigation Using the Ambient Magnetic Field as a Map
 Terrain Navigation Using the Ambient Magnetic Field as a Map Aalto University IndoorAtlas Ltd. August 30, 017 In collaboration with M. Kok, N. Wahlström, T. B. Schön, J. Kannala, E. Rahtu, and S. Särkkä
Terrain Navigation Using the Ambient Magnetic Field as a Map Aalto University IndoorAtlas Ltd. August 30, 017 In collaboration with M. Kok, N. Wahlström, T. B. Schön, J. Kannala, E. Rahtu, and S. Särkkä
Gaussian Processes (10/16/13)
") STA561: Probabilistic machine learning Gaussian Processes (10/16/13) Lecturer: Barbara Engelhardt Scribes: Changwei Hu, Di Jin, Mengdi Wang 1 Introduction In supervised learning, we observe some inputs
STA561: Probabilistic machine learning Gaussian Processes (10/16/13) Lecturer: Barbara Engelhardt Scribes: Changwei Hu, Di Jin, Mengdi Wang 1 Introduction In supervised learning, we observe some inputs
Robotics 2 Data Association. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Data Association Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Data Association Data association is the process of associating uncertain measurements to known tracks. Problem
Robotics 2 Data Association Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Data Association Data association is the process of associating uncertain measurements to known tracks. Problem
Dimension Reduction. David M. Blei. April 23, 2012
 Dimension Reduction David M. Blei April 23, 2012 1 Basic idea Goal: Compute a reduced representation of data from p -dimensional to q-dimensional, where q < p. x 1,...,x p z 1,...,z q (1) We want to do
Dimension Reduction David M. Blei April 23, 2012 1 Basic idea Goal: Compute a reduced representation of data from p -dimensional to q-dimensional, where q < p. x 1,...,x p z 1,...,z q (1) We want to do
Information Exchange in Multi-rover SLAM
 nformation Exchange in Multi-rover SLAM Brandon M Jones and Lang Tong School of Electrical and Computer Engineering Cornell University, thaca, NY 53 {bmj3,lt35}@cornelledu Abstract We investigate simultaneous
nformation Exchange in Multi-rover SLAM Brandon M Jones and Lang Tong School of Electrical and Computer Engineering Cornell University, thaca, NY 53 {bmj3,lt35}@cornelledu Abstract We investigate simultaneous
Localization of Radioactive Sources Zhifei Zhang
 Localization of Radioactive Sources Zhifei Zhang 4/13/2016 1 Outline Background and motivation Our goal and scenario Preliminary knowledge Related work Our approach and results 4/13/2016 2 Background and
Localization of Radioactive Sources Zhifei Zhang 4/13/2016 1 Outline Background and motivation Our goal and scenario Preliminary knowledge Related work Our approach and results 4/13/2016 2 Background and
A Spectral Approach to Linear Bayesian Updating
 A Spectral Approach to Linear Bayesian Updating Oliver Pajonk 1,2, Bojana V. Rosic 1, Alexander Litvinenko 1, and Hermann G. Matthies 1 1 Institute of Scientific Computing, TU Braunschweig, Germany 2 SPT
A Spectral Approach to Linear Bayesian Updating Oliver Pajonk 1,2, Bojana V. Rosic 1, Alexander Litvinenko 1, and Hermann G. Matthies 1 1 Institute of Scientific Computing, TU Braunschweig, Germany 2 SPT
SUMMARY. ) t, UNIT. Constant velocity represents uniform motion. Acceleration causes a change in velocity.
 t, UNIT. Constant velocity represents uniform motion. Acceleration causes a change in velocity.") UNIT A SUMMARY KEY CONCEPTS CHAPTER SUMMARY 1 Constant velocity represents uniform motion. Distance and Displacement Position-time graphs Average speed and average velocity Positive, negative, and zero
UNIT A SUMMARY KEY CONCEPTS CHAPTER SUMMARY 1 Constant velocity represents uniform motion. Distance and Displacement Position-time graphs Average speed and average velocity Positive, negative, and zero
STA 414/2104: Machine Learning
 STA 414/2104: Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistics! rsalakhu@cs.toronto.edu! http://www.cs.toronto.edu/~rsalakhu/ Lecture 9 Sequential Data So far
STA 414/2104: Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistics! rsalakhu@cs.toronto.edu! http://www.cs.toronto.edu/~rsalakhu/ Lecture 9 Sequential Data So far