Neuromorphic Sensing and Control of Autonomous Micro-Aerial Vehicles
|
|
|
- Loren Hamilton
- 5 years ago
- Views:
Transcription
1 Neuromorphic Sensing and Control of Autonomous Micro-Aerial Vehicles Commercialization Fellowship Technical Presentation Taylor Clawson Ithaca, NY June 12, 2018



2 About Me: Taylor Clawson 3 rd year PhD student in Mechanical and Aerospace Engineering Advisor: Silvia Ferrari Past Experience Mechanical Engineering BS, Utah State University, 2013 Lead Developer of custom reliability analysis software at Northrop Grumman Graduate Research Dynamics and Controls emphasizing neuromorphic sensing and control Flight modeling for insect-scale robots Neuromorphic autonomy for micro aerial vehicles Autonomous target tracking and obstacle avoidance
 can learn")

3 Neuromorphic Sensing and Control The Innovation Neuromorphic sensing and control algorithms for intelligent, energy-efficient autonomy 1 Spiking neural networks (SNNs) can learn online to improve performance or adapt to new conditions 2 Neuromorphic cameras have 1μs temporal resolution and require at most a few milliwatts of power inivation ( 3



")
4 Motivation: Small-Scale Autonomous Flight Safer: weigh less than 1 pound and thus are safe to operate near humans Smaller: can access narrow or confined spaces inaccessible to other vehicles Autonomous flight expands the capability of a single operator to monitor a larger area More effective search and rescue Agricultural monitoring Public event security 27g 9cm Crazyflie 20 ( RoboBee [Ma, 2013]
5 Neuromorphic Control 5
6 Single-layer SNN Controller SNN function approximation by connection weights M, W, and b y( t) = Ws( t) = WF( Mx( t) + b) Output connection weights W determined offline by supervised learning W = arg min f ( x ) VF( Mx + b) V j j j 2 Training data set generated by a stabilizing target control law (eg optimal linear control) ( x f x ) = j, ( j) j = 1,, M M W b s() t F f(x j ) M Input Connection Weights Output Connection Weights Input bias Post-synaptic current Nonlinear activation function Target control law data Number of training data points 6
7 SNN Control Model Neurons generate spike trains ρ(t) based on input current I(t) Synapses filter the spikes and generate postsynaptic current s(t) Synapses modeled as first-order low-pass filters h(t) M ( t) = ( t) = ( t t ) M k k= 1 k= 1 t s( t) = h( t ) ( ) d 0 1 / s h() t = e t s k t k M s Dirac delta Time of k th spike Spike count Synaptic time constant 7
8 Adaptive SNN Controller (Hovering Only) First step towards full flight envelope control Control signal u(t) provided entirely by spiking neural networks u( t) = u ( t) + u ( t) 0 adapt Non-adaptive term u 0 (t) trained offline by supervised learning to approximate traditional control law Adaptive term u adapt (t) adapts online to minimize output error x ref u 0 u adapt Δx u a u p u r Reference state Non-adaptive control input Adaptive control input State error Amplitude input Pitch input Roll input [T S Clawson, T C Stewart, C Eliasmith, S Ferr ri A Ad p ive Spiki g Neur Co ro er for F ppi g I sec -sc e Robo s, IEEE Symposium Series on Computational Intelligence (SSCI), Honolulu, HI, December 2017] 8
 = Λ ( xt ( ) + x( t)) Every element of u adapt computed from a single network of 100 neurons, eg u a = Ws () a a t The connection weights are")
, Honolulu, HI, December 2017]")
9 Adaptive SNN Controller (Hovering Only) Adaptive term u adapt comprised of inputs for flapping amplitude u a, pitch u p, roll u r u ( t) = u ( t) u ( t) u ( t) T adapt a p r Output weights adapt online to minimize output error T Et ( ) = Λ ( xt ( ) + x( t)) Every element of u adapt computed from a single network of 100 neurons, eg u a = Ws () a a t The connection weights are updated online to minimize output error W a ( t) = s ( t) E( t) a Λ x W a s a Error weight matrix State error Output connection weights Post-synaptic current Learning rate [T S Clawson, T C Stewart, C Eliasmith, S Ferr ri A Ad p ive Spiki g Neur Co ro er for F ppi g I sec -sc e Robo s, IEEE Symposium Series on Computational Intelligence (SSCI), Honolulu, HI, December 2017] 9

10 s Adaptive SNN Controller (Hovering Only) Comparison: SNN initialized with traditional controller SNN controller quickly adapts to wing asymmetries to stabilize hovering flight Traditional controller maintains stability, but drifts significantly from the target Ad p ive SNN IF overi g rge Ad p ive SNN IF [T S Clawson, T C Stewart, C Eliasmith, S Ferr ri A Ad p ive Spiki g Neur Co ro er for F ppi g I sec -sc e Robo s, IEEE Symposium Series on Computational Intelligence (SSCI), Honolulu, HI, December 2017] s 10
11 SNN Controller Full Flight Envelope SNN trained to approximate steady-state gain of gain-scheduled controller Gain matrices dependent on scheduling variables a u( t) = K ( a) x( t) K ( a) u( t) K ( a) ξ( t) Steady-state gain computed using transfer function and final value theorem G( s) ( si + K ( a)) K ( a) G(0) = K( a) K ( a) K ( a) Network output weights computed to approximate steady-state gain matrix K ss W = argmin K ( a) VF( Ma + b) V j SNN Control input is a linear transformation of post-synaptic current ss ss j 2 Ki u a s W PIF gain matrices Control deviation Scheduling variables Laplace variable Output connection weights x G() s K ss s State deviation Integral of output error Transfer function Steady-state gain matrix Post-synaptic current u( t) = W( a) s( t) 11
12 SNN Control Climbing Turn 12
13 SNN Control Complete Turn 13
14 Neuromorphic Sensing 14
 High data rate requires additional data processing Neuromorphic vision sensors have 1μs temporal")
15 Exteroceptive Sensing Motivation Onboard exteroceptive sensors required for full flight autonomy Fast dominant time scales of small-scale flight require high sensing rate and low latency Traditional sensors consume large amounts of power for high sensing rate (eg ~100 watts for high speed camera) High data rate requires additional data processing Neuromorphic vision sensors have 1μs temporal resolution and require at most a few milliwatts of power [Lichtsteiner, 8], [Brandli, ] Image Credit: inivation ( 15
) ln( I( x, y, ti)) = = 1, if ln( I( x, y, ti 1)) ln( I( x, y, ti)) = O eve s whe Off eve s whe The ith event e i is described by the tuple e = ( x, y, t, p) i i p = 1 i p = 1 i Source xy, + t + p")
16 t (s) t (s) Background: Neuromorphic Vision Neuromorphic cameras generate asynchronous events instead of frames An event at (x, y) is generated at time t i, with polarity p i 1, if ln( I( x, y, ti 1)) ln( I( x, y, ti)) = = 1, if ln( I( x, y, ti 1)) ln( I( x, y, ti)) = O eve s whe Off eve s whe The ith event e i is described by the tuple e = ( x, y, t, p) i i p = 1 i p = 1 i Source xy, + t + p { 1,1} The set of all events is = { e i i = 1,, N} O Eve s Off Eve s 16
 vx ( x, y, t) = I x ( x, y, t) I y ( x, y, t) It ( x, y, t) 0 dt + = vy ( x, y, t) Neuromorphic Optical Flow T Coordinates of some point r = rx")

17 The Optical Flow Problem Standard Optical Flow Problem Assume: (,, ) di x y t dt Determine horizontal and vertical flow (v x, v y ) from di( x, y, t) vx ( x, y, t) = I x ( x, y, t) I y ( x, y, t) It ( x, y, t) 0 dt + = vy ( x, y, t) Neuromorphic Optical Flow T Coordinates of some point r = rx r y in the image plane determined by optical flow t2 r ( t2) r ( 1) ( ) x x t v dt v ( ) d x, ( ) x ry ( t2) ry ( t1) = vydt vy ( ) v v = t 1 = 0 Scattered events are generated by motion of the point Determine optical flow by estimating the motion of points in the scene using the scattered events
![Neuromorphic Optical Flow Existing neuromorphic optical flow methods rely on optimization [Be os, ], [Rueckauer, ] Estimate continuous motion from discrete](/docs-images/93/114323847/images/18-2.jpg "events Introduce continuous event rate f through convolution of events with continuous kernel K n f ( x, y, t) = K( x, y, t) E( x, y, t) N E( x, y, t) = ( x")

18 Neuromorphic Optical Flow Existing neuromorphic optical flow methods rely on optimization [Be os, ], [Rueckauer, ] Estimate continuous motion from discrete events Introduce continuous event rate f through convolution of events with continuous kernel K n f ( x, y, t) = K( x, y, t) E( x, y, t) N E( x, y, t) = ( x xi, y yi, t ti ) i= 1 Assume gradient n of event rate is normal to the motion of points in the scene Speed of the motion is inversely proportional to magnitude of gradient Optical flow is written directly in terms of the vx 1 w c = event rate gradient 2 2 n = a b c T T t t a b w = = x y c c a v = y a + b b w w T
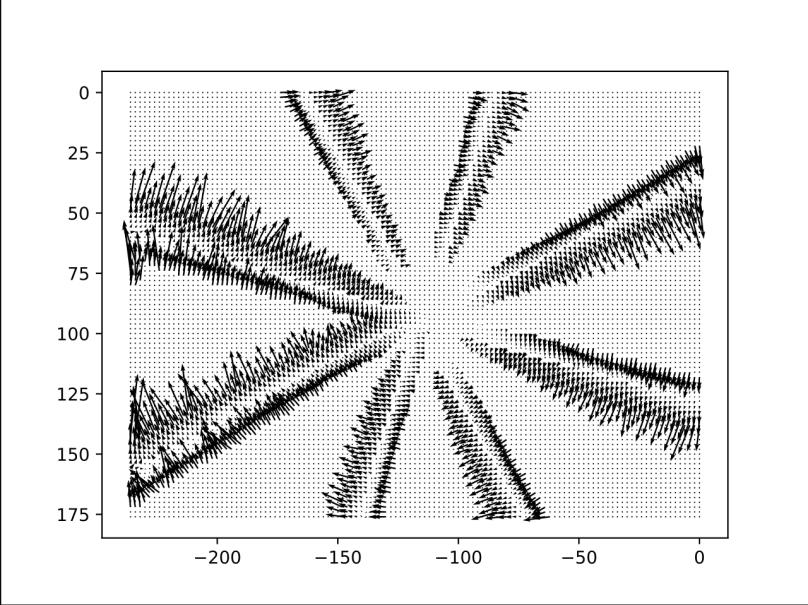
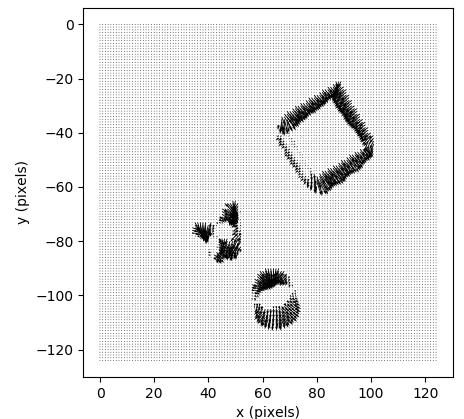

19 Neuromorphic Optical Flow Results Mean processing time per event: 07 μs 19

20 Neuromorphic Motion Detection Detect motion relative to the environment using a rotating neuromorphic camera Assumptions Known camera motion Camera motion dominated by rotation Total derivative of pixel intensity is zero World View Camera View Neuromorphic Camera 20
21 Neuromorphic Motion Detection Pixel intensity can be recovered by integrating the event rate By previous assumptions, future pixel intensity can be predicted if image-plane motion field (v x, v y ) is known Motion field due to camera rotation is ( ) t 0 I( x, y, t) = exp f ( x, y, ) d + I( x, y,0) 2 x xy vx ( x, y) = y ( t) + x( t) f y ( t) + yz ( t) f f 2 xy y vy ( x, y) = y ( t) + x( t) x z ( t) + f x( t) f f Pixel intensity after a short time Δt is predicted from motion field: I ( x, y, t) = I( x v t, y v t, t t) x y 21
 = I( x, y, t) I ( x,")
 = K ( x, y, t)")
 m( x, y,")
22 Neuromorphic Motion Detection Results 1 Compute difference between predicted and measured intensity I( x, y, t) = I( x, y, t) I ( x, y, t) I 1 2 I ' 2 Denoise by convolving with a multivariate Gaussian kernel K Σ with covariance Σ I '( x, y, t) = K ( x, y, t) I( x, y, t) 3 Detect motion by comparing smoothed intensity difference with a threshold γ 3a I 3b m 1, if I (x, y, t) m( x, y, t) = 0, otherwise 22



23 Summary Innovation Neuromorphic sensing and control algorithms for intelligent, energy-efficient autonomy Potential Applications Autonomous flight for small-scale UAVs Real-time target detection Obstacle avoidance 27g 9cm Crazyflie 20 ( Standard Camera Neuromorphic Camera Direction of Motion Detected Motion 23

24 Neuromorphic Sensing and Control of Autonomous Micro-Aerial Vehicles Taylor Clawson June 12, 2018 Related Work S C wso, S Ferr ri, S B Fu er, R J Wood, Spiki g Neur Ne work SNN Co ro of F ppi g I sec -scale Robo, Proc of the IEEE Conference on Decision and Control, Las Vegas, NV, pp , December 2016 S C wso, S B Fu er, R J Wood, S Ferr ri A B de E e e Appro ch o Mode i g Aerod ic F igh of Insect-sc e Robo, American Control Conference (ACC), Seattle, WA, May 2017 T S Clawson, T C Stewart, C Eliasmith, S Ferr ri A Ad p ive Spiki g Neur Co ro er for F ppi g I sec -scale Robo s, IEEE Symposium Series on Computational Intelligence (SSCI), Honolulu, HI, December
A Blade Element Approach to Modeling Aerodynamic Flight of an Insect-scale Robot
 A Blade Element Approach to Modeling Aerodynamic Flight of an Insect-scale Robot Taylor S. Clawson, Sawyer B. Fuller Robert J. Wood, Silvia Ferrari American Control Conference Seattle, WA May 25, 2016
A Blade Element Approach to Modeling Aerodynamic Flight of an Insect-scale Robot Taylor S. Clawson, Sawyer B. Fuller Robert J. Wood, Silvia Ferrari American Control Conference Seattle, WA May 25, 2016
Probability Map Building of Uncertain Dynamic Environments with Indistinguishable Obstacles
 Probability Map Building of Uncertain Dynamic Environments with Indistinguishable Obstacles Myungsoo Jun and Raffaello D Andrea Sibley School of Mechanical and Aerospace Engineering Cornell University
Probability Map Building of Uncertain Dynamic Environments with Indistinguishable Obstacles Myungsoo Jun and Raffaello D Andrea Sibley School of Mechanical and Aerospace Engineering Cornell University
Energy-Aware Coverage Path Planning of UAVs
 Energy-Aware Coverage Path Planning of UAVs Carmelo Di Franco, Giorgio C. Buttazzo IWES 2016 20 September 2016 ReTiS Lab, TeCIP Institute Scuola superiore Sant Anna - Pisa About me I m Carmelo Di Franco
Energy-Aware Coverage Path Planning of UAVs Carmelo Di Franco, Giorgio C. Buttazzo IWES 2016 20 September 2016 ReTiS Lab, TeCIP Institute Scuola superiore Sant Anna - Pisa About me I m Carmelo Di Franco
Improved Kalman Filter Initialisation using Neurofuzzy Estimation
 Improved Kalman Filter Initialisation using Neurofuzzy Estimation J. M. Roberts, D. J. Mills, D. Charnley and C. J. Harris Introduction It is traditional to initialise Kalman filters and extended Kalman
Improved Kalman Filter Initialisation using Neurofuzzy Estimation J. M. Roberts, D. J. Mills, D. Charnley and C. J. Harris Introduction It is traditional to initialise Kalman filters and extended Kalman
ONR Mine Warfare Autonomy Virtual Program Review September 7, 2017
 ONR Mine Warfare Autonomy Virtual Program Review September 7, 2017 Information-driven Guidance and Control for Adaptive Target Detection and Classification Silvia Ferrari Pingping Zhu and Bo Fu Mechanical
ONR Mine Warfare Autonomy Virtual Program Review September 7, 2017 Information-driven Guidance and Control for Adaptive Target Detection and Classification Silvia Ferrari Pingping Zhu and Bo Fu Mechanical
Joint GPS and Vision Estimation Using an Adaptive Filter
 1 Joint GPS and Vision Estimation Using an Adaptive Filter Shubhendra Vikram Singh Chauhan and Grace Xingxin Gao, University of Illinois at Urbana-Champaign Shubhendra Vikram Singh Chauhan received his
1 Joint GPS and Vision Estimation Using an Adaptive Filter Shubhendra Vikram Singh Chauhan and Grace Xingxin Gao, University of Illinois at Urbana-Champaign Shubhendra Vikram Singh Chauhan received his
Spiking Neural Network (SNN) Control of a Flapping Insect-scale Robot
 Control of a Flapping Insect-scale Robot") 2016 IEEE 55th Conference on Decision and Control (CDC) ARIA Resort & Casino December 12-14, 2016, Las Vegas, USA Spiking Neural Network (SNN) Control of a Flapping Insect-scale Robot Taylor S. Clawson
2016 IEEE 55th Conference on Decision and Control (CDC) ARIA Resort & Casino December 12-14, 2016, Las Vegas, USA Spiking Neural Network (SNN) Control of a Flapping Insect-scale Robot Taylor S. Clawson
Learning Spatio-Temporally Encoded Pattern Transformations in Structured Spiking Neural Networks 12
 Learning Spatio-Temporally Encoded Pattern Transformations in Structured Spiking Neural Networks 12 André Grüning, Brian Gardner and Ioana Sporea Department of Computer Science University of Surrey Guildford,
Learning Spatio-Temporally Encoded Pattern Transformations in Structured Spiking Neural Networks 12 André Grüning, Brian Gardner and Ioana Sporea Department of Computer Science University of Surrey Guildford,
Neuromorphic Network Based on Carbon Nanotube/Polymer Composites
 Neuromorphic Network Based on Carbon Nanotube/Polymer Composites Andrew Tudor, Kyunghyun Kim, Alex Ming Shen, Chris Shaffer, Dongwon Lee, Cameron D. Danesh, and Yong Chen Department of Mechanical & Aerospace
Neuromorphic Network Based on Carbon Nanotube/Polymer Composites Andrew Tudor, Kyunghyun Kim, Alex Ming Shen, Chris Shaffer, Dongwon Lee, Cameron D. Danesh, and Yong Chen Department of Mechanical & Aerospace
Evolution of the Average Synaptic Update Rule
 Supporting Text Evolution of the Average Synaptic Update Rule In this appendix we evaluate the derivative of Eq. 9 in the main text, i.e., we need to calculate log P (yk Y k, X k ) γ log P (yk Y k ). ()
Supporting Text Evolution of the Average Synaptic Update Rule In this appendix we evaluate the derivative of Eq. 9 in the main text, i.e., we need to calculate log P (yk Y k, X k ) γ log P (yk Y k ). ()
Nonlinear Landing Control for Quadrotor UAVs
 Nonlinear Landing Control for Quadrotor UAVs Holger Voos University of Applied Sciences Ravensburg-Weingarten, Mobile Robotics Lab, D-88241 Weingarten Abstract. Quadrotor UAVs are one of the most preferred
Nonlinear Landing Control for Quadrotor UAVs Holger Voos University of Applied Sciences Ravensburg-Weingarten, Mobile Robotics Lab, D-88241 Weingarten Abstract. Quadrotor UAVs are one of the most preferred
Forecasting Data Streams: Next Generation Flow Field Forecasting
 Forecasting Data Streams: Next Generation Flow Field Forecasting Kyle Caudle South Dakota School of Mines & Technology (SDSMT) kyle.caudle@sdsmt.edu Joint work with Michael Frey (Bucknell University) and
Forecasting Data Streams: Next Generation Flow Field Forecasting Kyle Caudle South Dakota School of Mines & Technology (SDSMT) kyle.caudle@sdsmt.edu Joint work with Michael Frey (Bucknell University) and
Gaussian with mean ( µ ) and standard deviation ( σ)
 and standard deviation ( σ)") Slide from Pieter Abbeel Gaussian with mean ( µ ) and standard deviation ( σ) 10/6/16 CSE-571: Robotics X ~ N( µ, σ ) Y ~ N( aµ + b, a σ ) Y = ax + b + + + + 1 1 1 1 1 1 1 1 1 1, ~ ) ( ) ( ), ( ~ ), (
Slide from Pieter Abbeel Gaussian with mean ( µ ) and standard deviation ( σ) 10/6/16 CSE-571: Robotics X ~ N( µ, σ ) Y ~ N( aµ + b, a σ ) Y = ax + b + + + + 1 1 1 1 1 1 1 1 1 1, ~ ) ( ) ( ), ( ~ ), (
Convolutional networks. Sebastian Seung
 Convolutional networks Sebastian Seung Convolutional network Neural network with spatial organization every neuron has a location usually on a grid Translation invariance synaptic strength depends on locations
Convolutional networks Sebastian Seung Convolutional network Neural network with spatial organization every neuron has a location usually on a grid Translation invariance synaptic strength depends on locations
Introduction to Natural Computation. Lecture 9. Multilayer Perceptrons and Backpropagation. Peter Lewis
 Introduction to Natural Computation Lecture 9 Multilayer Perceptrons and Backpropagation Peter Lewis 1 / 25 Overview of the Lecture Why multilayer perceptrons? Some applications of multilayer perceptrons.
Introduction to Natural Computation Lecture 9 Multilayer Perceptrons and Backpropagation Peter Lewis 1 / 25 Overview of the Lecture Why multilayer perceptrons? Some applications of multilayer perceptrons.
Fast classification using sparsely active spiking networks. Hesham Mostafa Institute of neural computation, UCSD
 Fast classification using sparsely active spiking networks Hesham Mostafa Institute of neural computation, UCSD Artificial networks vs. spiking networks backpropagation output layer Multi-layer networks
Fast classification using sparsely active spiking networks Hesham Mostafa Institute of neural computation, UCSD Artificial networks vs. spiking networks backpropagation output layer Multi-layer networks
Linear Regression, Neural Networks, etc.
 Linear Regression, Neural Networks, etc. Gradient Descent Many machine learning problems can be cast as optimization problems Define a function that corresponds to learning error. (More on this later)
Linear Regression, Neural Networks, etc. Gradient Descent Many machine learning problems can be cast as optimization problems Define a function that corresponds to learning error. (More on this later)
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Design of Norm-Optimal Iterative Learning Controllers: The Effect of an Iteration-Domain Kalman Filter for Disturbance Estimation
 Design of Norm-Optimal Iterative Learning Controllers: The Effect of an Iteration-Domain Kalman Filter for Disturbance Estimation Nicolas Degen, Autonomous System Lab, ETH Zürich Angela P. Schoellig, University
Design of Norm-Optimal Iterative Learning Controllers: The Effect of an Iteration-Domain Kalman Filter for Disturbance Estimation Nicolas Degen, Autonomous System Lab, ETH Zürich Angela P. Schoellig, University
Simulating Neural Networks. Lawrence Ward P465A
 Simulating Neural Networks Lawrence Ward P465A 1. Neural network (or Parallel Distributed Processing, PDP) models are used for a wide variety of roles, including recognizing patterns, implementing logic,
Simulating Neural Networks Lawrence Ward P465A 1. Neural network (or Parallel Distributed Processing, PDP) models are used for a wide variety of roles, including recognizing patterns, implementing logic,
Statistical Filters for Crowd Image Analysis
 Statistical Filters for Crowd Image Analysis Ákos Utasi, Ákos Kiss and Tamás Szirányi Distributed Events Analysis Research Group, Computer and Automation Research Institute H-1111 Budapest, Kende utca
Statistical Filters for Crowd Image Analysis Ákos Utasi, Ákos Kiss and Tamás Szirányi Distributed Events Analysis Research Group, Computer and Automation Research Institute H-1111 Budapest, Kende utca
Evaluation of different wind estimation methods in flight tests with a fixed-wing UAV
 Evaluation of different wind estimation methods in flight tests with a fixed-wing UAV Julian Sören Lorenz February 5, 2018 Contents 1 Glossary 2 2 Introduction 3 3 Tested algorithms 3 3.1 Unfiltered Method
Evaluation of different wind estimation methods in flight tests with a fixed-wing UAV Julian Sören Lorenz February 5, 2018 Contents 1 Glossary 2 2 Introduction 3 3 Tested algorithms 3 3.1 Unfiltered Method
CONTROL OF ROBOT CAMERA SYSTEM WITH ACTUATOR S DYNAMICS TO TRACK MOVING OBJECT
 Journal of Computer Science and Cybernetics, V.31, N.3 (2015), 255 265 DOI: 10.15625/1813-9663/31/3/6127 CONTROL OF ROBOT CAMERA SYSTEM WITH ACTUATOR S DYNAMICS TO TRACK MOVING OBJECT NGUYEN TIEN KIEM
Journal of Computer Science and Cybernetics, V.31, N.3 (2015), 255 265 DOI: 10.15625/1813-9663/31/3/6127 CONTROL OF ROBOT CAMERA SYSTEM WITH ACTUATOR S DYNAMICS TO TRACK MOVING OBJECT NGUYEN TIEN KIEM
Intelligent Systems Discriminative Learning, Neural Networks
 Intelligent Systems Discriminative Learning, Neural Networks Carsten Rother, Dmitrij Schlesinger WS2014/2015, Outline 1. Discriminative learning 2. Neurons and linear classifiers: 1) Perceptron-Algorithm
Intelligent Systems Discriminative Learning, Neural Networks Carsten Rother, Dmitrij Schlesinger WS2014/2015, Outline 1. Discriminative learning 2. Neurons and linear classifiers: 1) Perceptron-Algorithm
Artifical Neural Networks
 Neural Networks Artifical Neural Networks Neural Networks Biological Neural Networks.................................. Artificial Neural Networks................................... 3 ANN Structure...........................................
Neural Networks Artifical Neural Networks Neural Networks Biological Neural Networks.................................. Artificial Neural Networks................................... 3 ANN Structure...........................................
Learning Gaussian Process Models from Uncertain Data
 Learning Gaussian Process Models from Uncertain Data Patrick Dallaire, Camille Besse, and Brahim Chaib-draa DAMAS Laboratory, Computer Science & Software Engineering Department, Laval University, Canada
Learning Gaussian Process Models from Uncertain Data Patrick Dallaire, Camille Besse, and Brahim Chaib-draa DAMAS Laboratory, Computer Science & Software Engineering Department, Laval University, Canada
Nonlinear and Neural Network-based Control of a Small Four-Rotor Aerial Robot
 Nonlinear and Neural Network-based Control of a Small Four-Rotor Aerial Robot Holger Voos Abstract Small four-rotor aerial robots, so called quadrotor UAVs, have an enormous potential for all kind of neararea
Nonlinear and Neural Network-based Control of a Small Four-Rotor Aerial Robot Holger Voos Abstract Small four-rotor aerial robots, so called quadrotor UAVs, have an enormous potential for all kind of neararea
Multiscale Adaptive Sensor Systems
 Multiscale Adaptive Sensor Systems Silvia Ferrari Sibley School of Mechanical and Aerospace Engineering Cornell University ONR Maritime Sensing D&I Review Naval Surface Warfare Center, Carderock 9-11 August
Multiscale Adaptive Sensor Systems Silvia Ferrari Sibley School of Mechanical and Aerospace Engineering Cornell University ONR Maritime Sensing D&I Review Naval Surface Warfare Center, Carderock 9-11 August
Modulation-Feature based Textured Image Segmentation Using Curve Evolution
 Modulation-Feature based Textured Image Segmentation Using Curve Evolution Iasonas Kokkinos, Giorgos Evangelopoulos and Petros Maragos Computer Vision, Speech Communication and Signal Processing Group
Modulation-Feature based Textured Image Segmentation Using Curve Evolution Iasonas Kokkinos, Giorgos Evangelopoulos and Petros Maragos Computer Vision, Speech Communication and Signal Processing Group
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
Transactions on Information and Communications Technologies vol 6, 1994 WIT Press, ISSN
 Prediction of composite laminate residual strength based on a neural network approach R. Teti & G. Caprino Department of Materials and Production Engineering, University of Naples 'Federico II', Abstract
Prediction of composite laminate residual strength based on a neural network approach R. Teti & G. Caprino Department of Materials and Production Engineering, University of Naples 'Federico II', Abstract
Multi-layer Flight Control Synthesis and Analysis of a Small-scale UAV Helicopter
 Multi-layer Flight Control Synthesis and Analysis of a Small-scale UAV Helicopter Ali Karimoddini, Guowei Cai, Ben M. Chen, Hai Lin and Tong H. Lee Graduate School for Integrative Sciences and Engineering,
Multi-layer Flight Control Synthesis and Analysis of a Small-scale UAV Helicopter Ali Karimoddini, Guowei Cai, Ben M. Chen, Hai Lin and Tong H. Lee Graduate School for Integrative Sciences and Engineering,
Outline. Convolution. Filtering
 Filtering Outline Convolution Filtering Logistics HW1 HW2 - out tomorrow Recall: what is a digital (grayscale) image? Matrix of integer values Images as height fields Let s think of image as zero-padded
Filtering Outline Convolution Filtering Logistics HW1 HW2 - out tomorrow Recall: what is a digital (grayscale) image? Matrix of integer values Images as height fields Let s think of image as zero-padded
On the Computation of the Ego-Motion and Distance to Obstacles for a Micro Air Vehicle
 On the Computation of the Ego-Motion and Distance to Obstacles for a Micro Air Vehicle Ram V. Iyer, hihai He and Phillip R. Chandler Abstract In this paper, we have considered the problem of velocity and
On the Computation of the Ego-Motion and Distance to Obstacles for a Micro Air Vehicle Ram V. Iyer, hihai He and Phillip R. Chandler Abstract In this paper, we have considered the problem of velocity and
Route-Planning for Real-Time Safety-Assured Autonomous Aircraft (RTS3A)
") Route-Planning for Real-Time Safety-Assured Autonomous Aircraft (RTS3A) Raghvendra V. Cowlagi 1 Jeffrey T. Chambers 2 Nikola Baltadjiev 2 1 Worcester Polytechnic Institute, Worcester, MA. 2 Aurora Flight
Route-Planning for Real-Time Safety-Assured Autonomous Aircraft (RTS3A) Raghvendra V. Cowlagi 1 Jeffrey T. Chambers 2 Nikola Baltadjiev 2 1 Worcester Polytechnic Institute, Worcester, MA. 2 Aurora Flight
Mathematical Modelling and Dynamics Analysis of Flat Multirotor Configurations
 Mathematical Modelling and Dynamics Analysis of Flat Multirotor Configurations DENIS KOTARSKI, Department of Mechanical Engineering, Karlovac University of Applied Sciences, J.J. Strossmayera 9, Karlovac,
Mathematical Modelling and Dynamics Analysis of Flat Multirotor Configurations DENIS KOTARSKI, Department of Mechanical Engineering, Karlovac University of Applied Sciences, J.J. Strossmayera 9, Karlovac,
A Blade Element Approach to Modeling Aerodynamic Flight of an Insect-scale Robot
 A Blade Element Approach to Modeling Aerodynamic Flight of an Insect-scale Robot Taylor S. Clawson 1 Student Member, IEEE, Sawyer B. Fuller 2, Robert J. Wood 3 Senior Member, IEEE, and Silvia Ferrari 1
A Blade Element Approach to Modeling Aerodynamic Flight of an Insect-scale Robot Taylor S. Clawson 1 Student Member, IEEE, Sawyer B. Fuller 2, Robert J. Wood 3 Senior Member, IEEE, and Silvia Ferrari 1
Oil Field Production using Machine Learning. CS 229 Project Report
 Oil Field Production using Machine Learning CS 229 Project Report Sumeet Trehan, Energy Resources Engineering, Stanford University 1 Introduction Effective management of reservoirs motivates oil and gas
Oil Field Production using Machine Learning CS 229 Project Report Sumeet Trehan, Energy Resources Engineering, Stanford University 1 Introduction Effective management of reservoirs motivates oil and gas
CSCI 250: Intro to Robotics. Spring Term 2017 Prof. Levy. Computer Vision: A Brief Survey
 CSCI 25: Intro to Robotics Spring Term 27 Prof. Levy Computer Vision: A Brief Survey What Is Computer Vision? Higher-order tasks Face recognition Object recognition (Deep Learning) What Is Computer Vision?
CSCI 25: Intro to Robotics Spring Term 27 Prof. Levy Computer Vision: A Brief Survey What Is Computer Vision? Higher-order tasks Face recognition Object recognition (Deep Learning) What Is Computer Vision?
Video and Motion Analysis Computer Vision Carnegie Mellon University (Kris Kitani)
") Video and Motion Analysis 16-385 Computer Vision Carnegie Mellon University (Kris Kitani) Optical flow used for feature tracking on a drone Interpolated optical flow used for super slow-mo optical flow
Video and Motion Analysis 16-385 Computer Vision Carnegie Mellon University (Kris Kitani) Optical flow used for feature tracking on a drone Interpolated optical flow used for super slow-mo optical flow
CDS 110: Lecture 2-2 Modeling Using Differential Equations
 CDS 110: Lecture 2-2 Modeling Using Differential Equations Richard M. Murray and Hideo Mabuchi 4 October 2006 Goals: Provide a more detailed description of the use of ODEs for modeling Provide examples
CDS 110: Lecture 2-2 Modeling Using Differential Equations Richard M. Murray and Hideo Mabuchi 4 October 2006 Goals: Provide a more detailed description of the use of ODEs for modeling Provide examples
Vision for Mobile Robot Navigation: A Survey
 Vision for Mobile Robot Navigation: A Survey (February 2002) Guilherme N. DeSouza & Avinash C. Kak presentation by: Job Zondag 27 February 2009 Outline: Types of Navigation Absolute localization (Structured)
Vision for Mobile Robot Navigation: A Survey (February 2002) Guilherme N. DeSouza & Avinash C. Kak presentation by: Job Zondag 27 February 2009 Outline: Types of Navigation Absolute localization (Structured)
Pose tracking of magnetic objects
 Pose tracking of magnetic objects Niklas Wahlström Department of Information Technology, Uppsala University, Sweden Novmber 13, 2017 niklas.wahlstrom@it.uu.se Seminar Vi2 Short about me 2005-2010: Applied
Pose tracking of magnetic objects Niklas Wahlström Department of Information Technology, Uppsala University, Sweden Novmber 13, 2017 niklas.wahlstrom@it.uu.se Seminar Vi2 Short about me 2005-2010: Applied
Stochastic and Adaptive Optimal Control
 Stochastic and Adaptive Optimal Control Robert Stengel Optimal Control and Estimation, MAE 546 Princeton University, 2018! Nonlinear systems with random inputs and perfect measurements! Stochastic neighboring-optimal
Stochastic and Adaptive Optimal Control Robert Stengel Optimal Control and Estimation, MAE 546 Princeton University, 2018! Nonlinear systems with random inputs and perfect measurements! Stochastic neighboring-optimal
Estimation of State Noise for the Ensemble Kalman filter algorithm for 2D shallow water equations.
 Estimation of State Noise for the Ensemble Kalman filter algorithm for 2D shallow water equations. May 6, 2009 Motivation Constitutive Equations EnKF algorithm Some results Method Navier Stokes equations
Estimation of State Noise for the Ensemble Kalman filter algorithm for 2D shallow water equations. May 6, 2009 Motivation Constitutive Equations EnKF algorithm Some results Method Navier Stokes equations
Adaptive Robust Control (ARC) for an Altitude Control of a Quadrotor Type UAV Carrying an Unknown Payloads
 for an Altitude Control of a Quadrotor Type UAV Carrying an Unknown Payloads") 2 th International Conference on Control, Automation and Systems Oct. 26-29, 2 in KINTEX, Gyeonggi-do, Korea Adaptive Robust Control (ARC) for an Altitude Control of a Quadrotor Type UAV Carrying an Unknown
2 th International Conference on Control, Automation and Systems Oct. 26-29, 2 in KINTEX, Gyeonggi-do, Korea Adaptive Robust Control (ARC) for an Altitude Control of a Quadrotor Type UAV Carrying an Unknown
Fast neural network simulations with population density methods
 Fast neural network simulations with population density methods Duane Q. Nykamp a,1 Daniel Tranchina b,a,c,2 a Courant Institute of Mathematical Science b Department of Biology c Center for Neural Science
Fast neural network simulations with population density methods Duane Q. Nykamp a,1 Daniel Tranchina b,a,c,2 a Courant Institute of Mathematical Science b Department of Biology c Center for Neural Science
Developed Blimp Robot Based On Ultrasonic Sensors Using Possibilities Distribution and Fuzzy Logic
 Developed Blimp Robot Based On Ultrasonic Sensors Using Possibilities Distribution and Fuzzy Logic Rami Al-Jarrah and Hubert Roth Siegen University/Automatic Control Engineering, Siegen, Germany Email:
Developed Blimp Robot Based On Ultrasonic Sensors Using Possibilities Distribution and Fuzzy Logic Rami Al-Jarrah and Hubert Roth Siegen University/Automatic Control Engineering, Siegen, Germany Email:
POWER SYSTEM DYNAMIC SECURITY ASSESSMENT CLASSICAL TO MODERN APPROACH
 Abstract POWER SYSTEM DYNAMIC SECURITY ASSESSMENT CLASSICAL TO MODERN APPROACH A.H.M.A.Rahim S.K.Chakravarthy Department of Electrical Engineering K.F. University of Petroleum and Minerals Dhahran. Dynamic
Abstract POWER SYSTEM DYNAMIC SECURITY ASSESSMENT CLASSICAL TO MODERN APPROACH A.H.M.A.Rahim S.K.Chakravarthy Department of Electrical Engineering K.F. University of Petroleum and Minerals Dhahran. Dynamic
encoding and estimation bottleneck and limits to visual fidelity
 Retina Light Optic Nerve photoreceptors encoding and estimation bottleneck and limits to visual fidelity interneurons ganglion cells light The Neural Coding Problem s(t) {t i } Central goals for today:
Retina Light Optic Nerve photoreceptors encoding and estimation bottleneck and limits to visual fidelity interneurons ganglion cells light The Neural Coding Problem s(t) {t i } Central goals for today:
A Novel Activity Detection Method
 A Novel Activity Detection Method Gismy George P.G. Student, Department of ECE, Ilahia College of,muvattupuzha, Kerala, India ABSTRACT: This paper presents an approach for activity state recognition of
A Novel Activity Detection Method Gismy George P.G. Student, Department of ECE, Ilahia College of,muvattupuzha, Kerala, India ABSTRACT: This paper presents an approach for activity state recognition of
A Three-dimensional Physiologically Realistic Model of the Retina
 A Three-dimensional Physiologically Realistic Model of the Retina Michael Tadross, Cameron Whitehouse, Melissa Hornstein, Vicky Eng and Evangelia Micheli-Tzanakou Department of Biomedical Engineering 617
A Three-dimensional Physiologically Realistic Model of the Retina Michael Tadross, Cameron Whitehouse, Melissa Hornstein, Vicky Eng and Evangelia Micheli-Tzanakou Department of Biomedical Engineering 617
Biologically inspired sensor fusion for real-time wind gust estimation in autonomous UAV navigation
 Biologically inspired sensor fusion for real-time wind gust estimation in autonomous UAV navigation Reliability and accuracy of navigation in flying drones are one of the key challenges that must be solved
Biologically inspired sensor fusion for real-time wind gust estimation in autonomous UAV navigation Reliability and accuracy of navigation in flying drones are one of the key challenges that must be solved
CMSC 421: Neural Computation. Applications of Neural Networks
 CMSC 42: Neural Computation definition synonyms neural networks artificial neural networks neural modeling connectionist models parallel distributed processing AI perspective Applications of Neural Networks
CMSC 42: Neural Computation definition synonyms neural networks artificial neural networks neural modeling connectionist models parallel distributed processing AI perspective Applications of Neural Networks
Artificial Neural Networks
 Artificial Neural Networks 鮑興國 Ph.D. National Taiwan University of Science and Technology Outline Perceptrons Gradient descent Multi-layer networks Backpropagation Hidden layer representations Examples
Artificial Neural Networks 鮑興國 Ph.D. National Taiwan University of Science and Technology Outline Perceptrons Gradient descent Multi-layer networks Backpropagation Hidden layer representations Examples
4. Multilayer Perceptrons
 4. Multilayer Perceptrons This is a supervised error-correction learning algorithm. 1 4.1 Introduction A multilayer feedforward network consists of an input layer, one or more hidden layers, and an output
4. Multilayer Perceptrons This is a supervised error-correction learning algorithm. 1 4.1 Introduction A multilayer feedforward network consists of an input layer, one or more hidden layers, and an output
Application of Artificial Neural Networks in Evaluation and Identification of Electrical Loss in Transformers According to the Energy Consumption
 Application of Artificial Neural Networks in Evaluation and Identification of Electrical Loss in Transformers According to the Energy Consumption ANDRÉ NUNES DE SOUZA, JOSÉ ALFREDO C. ULSON, IVAN NUNES
Application of Artificial Neural Networks in Evaluation and Identification of Electrical Loss in Transformers According to the Energy Consumption ANDRÉ NUNES DE SOUZA, JOSÉ ALFREDO C. ULSON, IVAN NUNES
Nonlinear Control of a Quadrotor Micro-UAV using Feedback-Linearization
 Proceedings of the 2009 IEEE International Conference on Mechatronics. Malaga, Spain, April 2009. Nonlinear Control of a Quadrotor Micro-UAV using Feedback-Linearization Holger Voos University of Applied
Proceedings of the 2009 IEEE International Conference on Mechatronics. Malaga, Spain, April 2009. Nonlinear Control of a Quadrotor Micro-UAV using Feedback-Linearization Holger Voos University of Applied
This document is downloaded from DR-NTU, Nanyang Technological University Library, Singapore.
 This document is downloaded from DR-NTU, Nanyang Technological University Library, Singapore. Title Liquid state machine with dendritically enhanced readout for low-power, neuromorphic VLSI implementations
This document is downloaded from DR-NTU, Nanyang Technological University Library, Singapore. Title Liquid state machine with dendritically enhanced readout for low-power, neuromorphic VLSI implementations
1 Introduction. 2 Successive Convexification Algorithm
 1 Introduction There has been growing interest in cooperative group robotics [], with potential applications in construction and assembly. Most of this research focuses on grounded or mobile manipulator
1 Introduction There has been growing interest in cooperative group robotics [], with potential applications in construction and assembly. Most of this research focuses on grounded or mobile manipulator
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
with Application to Autonomous Vehicles
 Nonlinear with Application to Autonomous Vehicles (Ph.D. Candidate) C. Silvestre (Supervisor) P. Oliveira (Co-supervisor) Institute for s and Robotics Instituto Superior Técnico Portugal January 2010 Presentation
Nonlinear with Application to Autonomous Vehicles (Ph.D. Candidate) C. Silvestre (Supervisor) P. Oliveira (Co-supervisor) Institute for s and Robotics Instituto Superior Técnico Portugal January 2010 Presentation
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
arxiv: v1 [cs.et] 20 Nov 2014
![arxiv: v1 [cs.et] 20 Nov 2014](/thumbs/81/83023481.jpg "arxiv: v1 [cs.et] 20 Nov 2014") Liquid State Machine with Dendritically Enhanced Readout for Low-power, Neuromorphic VLSI Implementations Subhrajit Roy, Student Member, IEEE, Amitava Banerjee and Arindam Basu, Member, IEEE arxiv:4.5458v
Liquid State Machine with Dendritically Enhanced Readout for Low-power, Neuromorphic VLSI Implementations Subhrajit Roy, Student Member, IEEE, Amitava Banerjee and Arindam Basu, Member, IEEE arxiv:4.5458v
A Reservoir Sampling Algorithm with Adaptive Estimation of Conditional Expectation
 A Reservoir Sampling Algorithm with Adaptive Estimation of Conditional Expectation Vu Malbasa and Slobodan Vucetic Abstract Resource-constrained data mining introduces many constraints when learning from
A Reservoir Sampling Algorithm with Adaptive Estimation of Conditional Expectation Vu Malbasa and Slobodan Vucetic Abstract Resource-constrained data mining introduces many constraints when learning from
Computational Intelligence Lecture 6: Associative Memory
 Computational Intelligence Lecture 6: Associative Memory Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2011 Farzaneh Abdollahi Computational Intelligence
Computational Intelligence Lecture 6: Associative Memory Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2011 Farzaneh Abdollahi Computational Intelligence
1 INTRODUCTION 2 PROBLEM DEFINITION
 Autonomous cruise control with cut-in target vehicle detection Ashwin Carvalho, Alek Williams, Stéphanie Lefèvre & Francesco Borrelli Department of Mechanical Engineering University of California Berkeley,
Autonomous cruise control with cut-in target vehicle detection Ashwin Carvalho, Alek Williams, Stéphanie Lefèvre & Francesco Borrelli Department of Mechanical Engineering University of California Berkeley,
Synaptic Devices and Neuron Circuits for Neuron-Inspired NanoElectronics
 Synaptic Devices and Neuron Circuits for Neuron-Inspired NanoElectronics Byung-Gook Park Inter-university Semiconductor Research Center & Department of Electrical and Computer Engineering Seoul National
Synaptic Devices and Neuron Circuits for Neuron-Inspired NanoElectronics Byung-Gook Park Inter-university Semiconductor Research Center & Department of Electrical and Computer Engineering Seoul National
Autonomous Robotic Vehicles
 Autonomous Robotic Vehicles Ground, Air, Undersea Jim Keller July 15, 2005 Types of Vehicles Ground Wheeled Tracked Legged Crawling/snake Air Fixed wing Powered gliders Rotary wing Flapping wing Morphing
Autonomous Robotic Vehicles Ground, Air, Undersea Jim Keller July 15, 2005 Types of Vehicles Ground Wheeled Tracked Legged Crawling/snake Air Fixed wing Powered gliders Rotary wing Flapping wing Morphing
Comments. Assignment 3 code released. Thought questions 3 due this week. Mini-project: hopefully you have started. implement classification algorithms
 Neural networks Comments Assignment 3 code released implement classification algorithms use kernels for census dataset Thought questions 3 due this week Mini-project: hopefully you have started 2 Example:
Neural networks Comments Assignment 3 code released implement classification algorithms use kernels for census dataset Thought questions 3 due this week Mini-project: hopefully you have started 2 Example:
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Hover Control for Helicopter Using Neural Network-Based Model Reference Adaptive Controller
 Vol.13 No.1, 217 مجلد 13 العدد 217 1 Hover Control for Helicopter Using Neural Network-Based Model Reference Adaptive Controller Abdul-Basset A. Al-Hussein Electrical Engineering Department Basrah University
Vol.13 No.1, 217 مجلد 13 العدد 217 1 Hover Control for Helicopter Using Neural Network-Based Model Reference Adaptive Controller Abdul-Basset A. Al-Hussein Electrical Engineering Department Basrah University
Deep Learning: Approximation of Functions by Composition
 Deep Learning: Approximation of Functions by Composition Zuowei Shen Department of Mathematics National University of Singapore Outline 1 A brief introduction of approximation theory 2 Deep learning: approximation
Deep Learning: Approximation of Functions by Composition Zuowei Shen Department of Mathematics National University of Singapore Outline 1 A brief introduction of approximation theory 2 Deep learning: approximation
Reconnaissance d objetsd et vision artificielle
 Reconnaissance d objetsd et vision artificielle http://www.di.ens.fr/willow/teaching/recvis09 Lecture 6 Face recognition Face detection Neural nets Attention! Troisième exercice de programmation du le
Reconnaissance d objetsd et vision artificielle http://www.di.ens.fr/willow/teaching/recvis09 Lecture 6 Face recognition Face detection Neural nets Attention! Troisième exercice de programmation du le
Feedforward Neural Nets and Backpropagation
 Feedforward Neural Nets and Backpropagation Julie Nutini University of British Columbia MLRG September 28 th, 2016 1 / 23 Supervised Learning Roadmap Supervised Learning: Assume that we are given the features
Feedforward Neural Nets and Backpropagation Julie Nutini University of British Columbia MLRG September 28 th, 2016 1 / 23 Supervised Learning Roadmap Supervised Learning: Assume that we are given the features
UAV Navigation: Airborne Inertial SLAM
 Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in
Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in
CS 532: 3D Computer Vision 6 th Set of Notes
 1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
LINEAR SYSTEMS. J. Elder PSYC 6256 Principles of Neural Coding
 LINEAR SYSTEMS Linear Systems 2 Neural coding and cognitive neuroscience in general concerns input-output relationships. Inputs Light intensity Pre-synaptic action potentials Number of items in display
LINEAR SYSTEMS Linear Systems 2 Neural coding and cognitive neuroscience in general concerns input-output relationships. Inputs Light intensity Pre-synaptic action potentials Number of items in display
OPTIMAL TRAJECTORY PLANNING AND LQR CONTROL FOR A QUADROTOR UAV. Ian D. Cowling James F. Whidborne Alastair K. Cooke
 OPTIMAL TRAJECTORY PLANNING AND LQR CONTROL FOR A QUADROTOR UAV Ian D. Cowling James F. Whidborne Alastair K. Cooke Department of Aerospace Sciences, Cranfield University, Bedfordshire, MK43 AL, U.K Abstract:
OPTIMAL TRAJECTORY PLANNING AND LQR CONTROL FOR A QUADROTOR UAV Ian D. Cowling James F. Whidborne Alastair K. Cooke Department of Aerospace Sciences, Cranfield University, Bedfordshire, MK43 AL, U.K Abstract:
From Bayes to Extended Kalman Filter
 From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
CSE/NB 528 Final Lecture: All Good Things Must. CSE/NB 528: Final Lecture
 CSE/NB 528 Final Lecture: All Good Things Must 1 Course Summary Where have we been? Course Highlights Where do we go from here? Challenges and Open Problems Further Reading 2 What is the neural code? What
CSE/NB 528 Final Lecture: All Good Things Must 1 Course Summary Where have we been? Course Highlights Where do we go from here? Challenges and Open Problems Further Reading 2 What is the neural code? What
Information Exchange in Multi-rover SLAM
 nformation Exchange in Multi-rover SLAM Brandon M Jones and Lang Tong School of Electrical and Computer Engineering Cornell University, thaca, NY 53 {bmj3,lt35}@cornelledu Abstract We investigate simultaneous
nformation Exchange in Multi-rover SLAM Brandon M Jones and Lang Tong School of Electrical and Computer Engineering Cornell University, thaca, NY 53 {bmj3,lt35}@cornelledu Abstract We investigate simultaneous
ECE 592 Topics in Data Science
 ECE 592 Topics in Data Science Final Fall 2017 December 11, 2017 Please remember to justify your answers carefully, and to staple your test sheet and answers together before submitting. Name: Student ID:
ECE 592 Topics in Data Science Final Fall 2017 December 11, 2017 Please remember to justify your answers carefully, and to staple your test sheet and answers together before submitting. Name: Student ID:
Generalized Laplacian as Focus Measure
 Generalized Laplacian as Focus Measure Muhammad Riaz 1, Seungjin Park, Muhammad Bilal Ahmad 1, Waqas Rasheed 1, and Jongan Park 1 1 School of Information & Communications Engineering, Chosun University,
Generalized Laplacian as Focus Measure Muhammad Riaz 1, Seungjin Park, Muhammad Bilal Ahmad 1, Waqas Rasheed 1, and Jongan Park 1 1 School of Information & Communications Engineering, Chosun University,
Role of Assembling Invariant Moments and SVM in Fingerprint Recognition
 56 Role of Assembling Invariant Moments SVM in Fingerprint Recognition 1 Supriya Wable, 2 Chaitali Laulkar 1, 2 Department of Computer Engineering, University of Pune Sinhgad College of Engineering, Pune-411
56 Role of Assembling Invariant Moments SVM in Fingerprint Recognition 1 Supriya Wable, 2 Chaitali Laulkar 1, 2 Department of Computer Engineering, University of Pune Sinhgad College of Engineering, Pune-411
16.410/413 Principles of Autonomy and Decision Making
 16.410/413 Principles of Autonomy and Decision Making Lecture 23: Markov Decision Processes Policy Iteration Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology December
16.410/413 Principles of Autonomy and Decision Making Lecture 23: Markov Decision Processes Policy Iteration Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology December
Synaptic dynamics. John D. Murray. Synaptic currents. Simple model of the synaptic gating variable. First-order kinetics
 Synaptic dynamics John D. Murray A dynamical model for synaptic gating variables is presented. We use this to study the saturation of synaptic gating at high firing rate. Shunting inhibition and the voltage
Synaptic dynamics John D. Murray A dynamical model for synaptic gating variables is presented. We use this to study the saturation of synaptic gating at high firing rate. Shunting inhibition and the voltage
Computational statistics
 Computational statistics Lecture 3: Neural networks Thierry Denœux 5 March, 2016 Neural networks A class of learning methods that was developed separately in different fields statistics and artificial
Computational statistics Lecture 3: Neural networks Thierry Denœux 5 March, 2016 Neural networks A class of learning methods that was developed separately in different fields statistics and artificial
Multi-layer Neural Networks
 Multi-layer Neural Networks Steve Renals Informatics 2B Learning and Data Lecture 13 8 March 2011 Informatics 2B: Learning and Data Lecture 13 Multi-layer Neural Networks 1 Overview Multi-layer neural
Multi-layer Neural Networks Steve Renals Informatics 2B Learning and Data Lecture 13 8 March 2011 Informatics 2B: Learning and Data Lecture 13 Multi-layer Neural Networks 1 Overview Multi-layer neural
Raktim Bhattacharya. . AERO 632: Design of Advance Flight Control System. Preliminaries
 . AERO 632: of Advance Flight Control System. Preliminaries Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. Preliminaries Signals & Systems Laplace
. AERO 632: of Advance Flight Control System. Preliminaries Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. Preliminaries Signals & Systems Laplace
Adaptation in the Neural Code of the Retina
 Adaptation in the Neural Code of the Retina Lens Retina Fovea Optic Nerve Optic Nerve Bottleneck Neurons Information Receptors: 108 95% Optic Nerve 106 5% After Polyak 1941 Visual Cortex ~1010 Mean Intensity
Adaptation in the Neural Code of the Retina Lens Retina Fovea Optic Nerve Optic Nerve Bottleneck Neurons Information Receptors: 108 95% Optic Nerve 106 5% After Polyak 1941 Visual Cortex ~1010 Mean Intensity
Neural Encoding: Firing Rates and Spike Statistics
 Neural Encoding: Firing Rates and Spike Statistics Dayan and Abbott (21) Chapter 1 Instructor: Yoonsuck Choe; CPSC 644 Cortical Networks Background: Dirac δ Function Dirac δ function has the following
Neural Encoding: Firing Rates and Spike Statistics Dayan and Abbott (21) Chapter 1 Instructor: Yoonsuck Choe; CPSC 644 Cortical Networks Background: Dirac δ Function Dirac δ function has the following
A First Attempt of Reservoir Pruning for Classification Problems
 A First Attempt of Reservoir Pruning for Classification Problems Xavier Dutoit, Hendrik Van Brussel, Marnix Nuttin Katholieke Universiteit Leuven - P.M.A. Celestijnenlaan 300b, 3000 Leuven - Belgium Abstract.
A First Attempt of Reservoir Pruning for Classification Problems Xavier Dutoit, Hendrik Van Brussel, Marnix Nuttin Katholieke Universiteit Leuven - P.M.A. Celestijnenlaan 300b, 3000 Leuven - Belgium Abstract.
Machine Learning Lecture 7
 Course Outline Machine Learning Lecture 7 Fundamentals (2 weeks) Bayes Decision Theory Probability Density Estimation Statistical Learning Theory 23.05.2016 Discriminative Approaches (5 weeks) Linear Discriminant
Course Outline Machine Learning Lecture 7 Fundamentals (2 weeks) Bayes Decision Theory Probability Density Estimation Statistical Learning Theory 23.05.2016 Discriminative Approaches (5 weeks) Linear Discriminant
Mobile Robots Localization
 Mobile Robots Localization Institute for Software Technology 1 Today s Agenda Motivation for Localization Odometry Odometry Calibration Error Model 2 Robotics is Easy control behavior perception modelling
Mobile Robots Localization Institute for Software Technology 1 Today s Agenda Motivation for Localization Odometry Odometry Calibration Error Model 2 Robotics is Easy control behavior perception modelling
Short Term Memory and Pattern Matching with Simple Echo State Networks
 Short Term Memory and Pattern Matching with Simple Echo State Networks Georg Fette (fette@in.tum.de), Julian Eggert (julian.eggert@honda-ri.de) Technische Universität München; Boltzmannstr. 3, 85748 Garching/München,
Short Term Memory and Pattern Matching with Simple Echo State Networks Georg Fette (fette@in.tum.de), Julian Eggert (julian.eggert@honda-ri.de) Technische Universität München; Boltzmannstr. 3, 85748 Garching/München,
Delayed Fusion of Relative State Measurements by Extending Stochastic Cloning via Direct Kalman Filtering
 Delayed Fusion of Relative State Measurements by Extending Stochastic Cloning via Direct Kalman Filtering Ehsan Asadi and Carlo L Bottasso Department of Aerospace Science and echnology Politecnico di Milano,
Delayed Fusion of Relative State Measurements by Extending Stochastic Cloning via Direct Kalman Filtering Ehsan Asadi and Carlo L Bottasso Department of Aerospace Science and echnology Politecnico di Milano,
A Quick Optimization of a Rocket Trajectory Using MCMC Method.
 nd Annual AIAA/USU Conference on Small Satellites A Quick Optimization of a Rocket Trajectory Using MCMC Method. Masashi Miura (The Graduate Univ. for Advanced Studies.) Yohsuke Nambu (Univ. Tokyo.) Masaaki
nd Annual AIAA/USU Conference on Small Satellites A Quick Optimization of a Rocket Trajectory Using MCMC Method. Masashi Miura (The Graduate Univ. for Advanced Studies.) Yohsuke Nambu (Univ. Tokyo.) Masaaki
Nonlinear State Estimation! Particle, Sigma-Points Filters!
 Nonlinear State Estimation! Particle, Sigma-Points Filters! Robert Stengel! Optimal Control and Estimation, MAE 546! Princeton University, 2017!! Particle filter!! Sigma-Points Unscented Kalman ) filter!!
Nonlinear State Estimation! Particle, Sigma-Points Filters! Robert Stengel! Optimal Control and Estimation, MAE 546! Princeton University, 2017!! Particle filter!! Sigma-Points Unscented Kalman ) filter!!
FLAT FIELDS FROM THE MOONLIT EARTH
 Instrument Science Report WFPC2 2008-01 FLAT FIELDS FROM THE MOONLIT EARTH R. C. Bohlin, J. Mack, and J. Biretta 2008 February 4 ABSTRACT The Earth illuminated by light from the full Moon was observed
Instrument Science Report WFPC2 2008-01 FLAT FIELDS FROM THE MOONLIT EARTH R. C. Bohlin, J. Mack, and J. Biretta 2008 February 4 ABSTRACT The Earth illuminated by light from the full Moon was observed