Multi-scale Adaptive Sensor Systems Silvia Ferrari, Professor Mechanical and Aerospace Engineering Cornell University
|
|
|
- Ernest Webb
- 5 years ago
- Views:
Transcription

1 ONR Maritime Sensing - Discovery & Invention (D&I) Review Naval Surface Warfare Center, Carderock (MD) August 21-23, 2018 Multi-scale Adaptive Sensor Systems Silvia Ferrari, Professor Mechanical and Aerospace Engineering Cornell University
 Dual/exploratory control System")
2 Vehicle Navigation and Control Traditional paradigm: Sensor information (output) used as feedback to the vehicle to support the vehicle navigation objectives. Guidance Vehicle Output Control Prior research foci: Sensor-based path planning Navigation sensors for obstacle avoidance Simultaneous localization and mapping (SLAM) Dual/exploratory control System identification Output-based feedback control 2
3 Sensor Navigation and Control New Traditional paradigm: paradigm: Vehicle is used to gather information (output) to support sensing objectives, such as coverage or target DCLT. Guidance Guidance Vehicle Sensor Output Output Control Control Information-driven sensor navigation and control Trajectory planning and feedback control based on information value, target and sensor geometries, and platform kinematic/dynamic constraints. S. Ferrari and T. A. Wettergren, Information-driven planning and Control, CRC Press, Boca Raton, FL, scheduled to appear


4 Modern Sensor Systems Multiple sensors installed on mobile vehicles for information gathering. Undersea surveillance Landmine detection and identification Monitoring of urban environments 4
 PDF-based control law u i (t) Terminal Cost Instantaneous cost (Lagrangian) T f J = φ[ ( x, T )] + L [ ( x, t), u ( t), t] dx dt i f X T 0 i i i Environment: y (km) Obstacle x (km) 5 Agent")
5 Distributed Optimal Control (DOC) Agents operating in Region of Interest (ROI) W R 2 Performance measured in terms of restriction operator (x i,t) Restriction Operator : W R R Time varying PDF (x i,t) PDF-based control law u i (t) Terminal Cost Instantaneous cost (Lagrangian) T f J = φ[ ( x, T )] + L [ ( x, t), u ( t), t] dx dt i f X T 0 i i i Environment: y (km) Obstacle x (km) 5 Agent Density, PDF (x i,t)
 and inertial positioning systems Network-level controller can dispatch agents to localize gradient intensification")
6 Technical Challenges (ASW) Environmental and operating conditions in situ may drastically differ from those used a priori Off-line DOC solutions no longer optimal Agents must react to local information, including new tactical constraints Limited communications (covertness) and inertial positioning systems Network-level controller can dispatch agents to localize gradient intensification while providing energy management, volume coverage, and robustness to component failure 1. Target: actual population is different from that assumed a priori. 2. Environment: conditions measured in situ are different from those forecasted by oceanographic models. 3. Platform: navigation settings are suboptimal, leading to incorrect estimates of agent position and/or direction. 4. Sensor: actual performance is different from the performance function model due to the above conditions, or sensor malfunctioning. 6
, *(x i ): max J J T f = φ[ ( x, T )] + L [ ( x, t), u ( t), t] dx i f X T 0 i i i dt Macroscopic state (PDF): Microscopic state of")
7 Technical Developments (Yr 2) Optimal and minimum number of agents to meet mission requirements (FISST) Information value and discrimination with limited communications Multi-scale environmental adaptation Optimal Time-varying Probability Density Function (PDF), *(x i ): max J J T f = φ[ ( x, T )] + L [ ( x, t), u ( t), t] dx i f X T 0 i i i dt Macroscopic state (PDF): Microscopic state of ith agent: x Agent dynamics:. x ( x i,) t i = [ xyθ,, ] = f[ x, u,] t i i i 7
8 DOC Analysis via Finite Set Statistics (FISST) 8
9 DOC and FISST Relationship Use Finite Set Statistics (FISST) to rigorously analyze DOC results: In DOC, the agent microscopic states are viewed as random variables, with a possibly infinite number of agents. FISST applies to a finite number of agents in the ROI (in the limit of N = 1) that is possibly unknown and changing over time (births, deaths,..). If the number of the agents is given, a multi-object probability density (MPDF) and the probability hypothesis density (PHD) of the agents in the DOC problem only depend on the spatial PDF of agents, or DOC macroscopic state. The propagation and update of the MPDF of the agents can be implemented by the FISST methods, like the PHD and the cardinalized PHD (or CPHD) filters. FISST, originally developed for multi-target multi-sensor tracking problems, extends probability theory and probability calculus to finite random sets (FRS). 9
10 Background on Finite Set Statistics Random Finite Sets (RFS) Let be an underlying space, such as a state space or a measurement space. Then denotes the power set of, which is the set of all subsets of. A random finite set (RFS) is a random variable Ψ on. Power Set The power set of a set = { x, x, x } is the set of all finite subsets of : = {,{ x},{ x },{ x },{ x, x },{ x, x },{ x, x },{ x, x, x }} Therefore, a realization of RFS Ψ can be: X = { } X X = { x1} = { x, x } 1 2
11 Multi-object Probability and Calculus Set Integral Let f( X) be a set function defined on. Then its set integral is defined as where 1 f ( X ) δ X f ( ) + f ({,..., }) d.. x x x x... 1 n 1 n= 1 n!. n Multi-object Probability Density Function (MPDF) The set function defined It is non-negative Its set integral is equal to 1 on is a multi-object probability density function if f( X) 0 f( X) δ X = 1 11
12 Finite Set Statistics (FISST) Probability Hypothesis Density (PHD) The probability hypothesis density of an RFS Ψ is a density function D Ψ ( x) on single objects x which is defined by: D Ψ δgψ δβψ ( x) = X fψ( { x W) δw = [] 1 = ( X) δx δx where the number ( x) is the density of objects at x. D Ψ Cardinality Distribution The cardinality distribution of an RFS Ψ is p Ψ Ψ= n) = X = n fψ ( n) = P( ( X) δ X 12
13 Example: Multi-Bernoulli RFS 13 Consider a simple example, where the RFS is represented by two random objects with respective PDFs fi ( x ) ( i = 1, 2) and the corresponding probability of existence qi ( i = 1, 2). Then, the MPDF can be expressed by (1 q1)(1 q2) if X = q1(1 q2) f1( x) + (1 q1) q2 f2( x) if X = { x} fψ ( X) = qq 1 2 [ f1( x1) f2( x2) + f1( x2) f2( x1) ] if X = { x1, x2} 0 if X > 2 Then the combined PHD can be expressed by DΨ ( x) = q1 f1( x) + q2 f2( x). Assume that these two 2-D PDFs are expressed by 1 1 f ( x) = w e + w e f T 1 T ( x µ ) Σ ( x µ ) ( x µ ) Σ ( x µ ) π Σ1 2 π Σ2 2 ( x ) = 1 e 2 π Σ 3 T x 3 ( x µ ) Σ ( µ ) q 1 = 0.9 q 2 = 0.5 µ 1 = [1, 2] T µ 2 = [ 3, 1] T µ 3 = [ 1, 0] T Σ 1 = Σ 2 = Σ 3 =

14 Example: Multi-Bernoulli RFS The two 2-D PDFs are plotted below: The combined PHD is 14
15 Example: Poisson RFS 15 Assume the locations of targets in a work space = [ 10 m,10 m] [ 10 m,10 m] are described by a Poisson RFS Ψ with a initial PHD D0 ( x). The expected number of target in the work space is equal to 5, such as N x x 0 = D0( ) d = 5 where the target location x = [ xy, ] T and the initial PHD D0 ( x) is defined by 2 2 sin( x + y ) D0 ( xy, ) = a 2 2 sin( x + y + 0.1) where a is a normalization term. The PDFs of targets are identical and can be expressed by D0( xy, ) D0( xy, ) ( xy, ) = = N0 5 and the MPDF of the targets in the work space is expressed by fψ ( X) = e N = e (5 ) N0 X 5 ( X) 0

16 Example: Poisson RFS Three samples of RFS Ψ are plotted below: The cardinality distribution is a Poisson distribution n N0 n 5 λ e λ e pψ ( n) = = n! n! The numbers of targets in the work space are 4, 5, and 7, respectively. The Poisson RFS is special case of the i.i.d.c. RFS, where the cardinality distribution is a Poisson distribution. Cardinality Distribution Three different realizations of the same RFS (a) 4 Agents (b) 5 agents (c) 7 agents 16
17 DOC Theory and Analysis via FISST By introducing the FISST framework in DOC, a RFS Ψ can represent the macroscopic state and can be used to describe the network, where the finite set of the states of all n agents in the ROI, X = { x1,, x n }, is treated as a realization of the RFS Ψ. The microscopic states of these agents can treated as continuous random variables denoted by Xi, i = 1, n. The number of agents, n, is also a realization of the discrete random variable N. Assume that the macroscopic state is a identical,independently distributed cluster (i.i.d.c) RFS, where PDFs of the agents are assume to be the same, denoted by ( x). Then, the MPDF of the RFS, Ψ, can be expressed by The expected number of the agents denoted by and the PHD of the RFS can be expressed by f ( X) = X! p ( X ) Ψ n 0 Ψ N Ψ N = n p ( n) Ψ Ψ X can be expressed by 17 D Ψ ( x) = N ( x) Ψ
18 DOC Results: Number of Assets In the DOC method, the number of the agents, N agent, is a constant. The cardinality distribution can be expressed by 1 if n= Nagent pψ ( n) = 0 if n Nagent Then, the MPDF in the DOC problem can be expressed by f Ψ X Nagent if X = N ( X) = 0 if X N and the PHD of the agents can be expressed by DΨ ( x) = N agent ( x) agent agent 18
19 Information Value with Limited Communications 19
![Information Value Analysis The Expected Entropy Reduction (EER) of a measurement set Z at location x at time k can be defined as the following: HZ ( ( x)) = HY (, λ) [ HY ( Z( x),, λ)] k k 1 Z k k 1](/docs-images/95/122578359/images/20-4.jpg "The Total Expected Entropy Reduction (Total EER) can be defined for the system of robots as: Htot ( k) : = H( Zk ( x)) dx The Average Total EER can be defined for the system of robots as: N 1 H ( k):")
20 Information Value Analysis The Expected Entropy Reduction (EER) of a measurement set Z at location x at time k can be defined as the following: HZ ( ( x)) = HY (, λ) [ HY ( Z( x),, λ)] k k 1 Z k k 1 The Total Expected Entropy Reduction (Total EER) can be defined for the system of robots as: Htot ( k) : = H( Zk ( x)) dx The Average Total EER can be defined for the system of robots as: N 1 H ( k): = H ( j) tot Total number of agents N N j = 1 tot Z k : measurement at location x at time k Y : binary categorical random variable k : set of all previous measurements up to time k λ : vector of environmental conditions 20
")

 Full Communications Disconnected communication")
21 Influence of Limited Communications Consider the problem of searching and information about targets and environments (DCLT) A network of sensors can provide better performance than a single agent provided they can communicate Resulting Hilbert Map Obstacle Partial Communications y (km) Probability of Occupancy y (km) Full Communications Disconnected communication graphs x (km) 21

.")
22 Information Value as a Function of Network Connectivity Numerical Results: Total and average expected entropy reduction (EER) for a network of N = 200 vehicles with varying communication abilities (% of agents). 5% 10% 50% 80% 100% 22
23 Preliminary Results The Average Total EER can be fit to a one-component exponential function H ( k) Ae tot By taking its derivative, the Average Total EER rate of the system can be obtained d dk Bk Bk ( H ( k)) = ABe Performance tot Coefficient Performance coefficient AB Number of robots R-squared value
24 Multi-scale Environmental Adaptation 24
25 Multi-Scale Adaptive DOC Adaptive distributed optimal control: - Agents make decisions based on in situ conditions and environment information - Value function V, defined in terms of discrete agent distribution k, Hilbert map h k at time k and control law C( k ): t f 1 tk V ϕ[ ] + L [, h, C( )] dx = V[, h, C( )] kf W k k k i k k Control law C l and Value function V l are iteratively improved online, where l is the iteration Policy-Improvement Routine: { L } C ( ) = arg min u (, h, u ) dx + V[ h, C ( )] l+ 1 k k W k k k i k+ 1, k l Value-Determination Operation: V [, C( )] = L (, h, u ) dx + V[, h, C( )] l+ 1 k W k k k i l k+ 1 k 25 Optimal value function V * : V = min u (, h, u ) dx + V [, h, C ()] { L + 1 } * * * * * k X k k k i k k

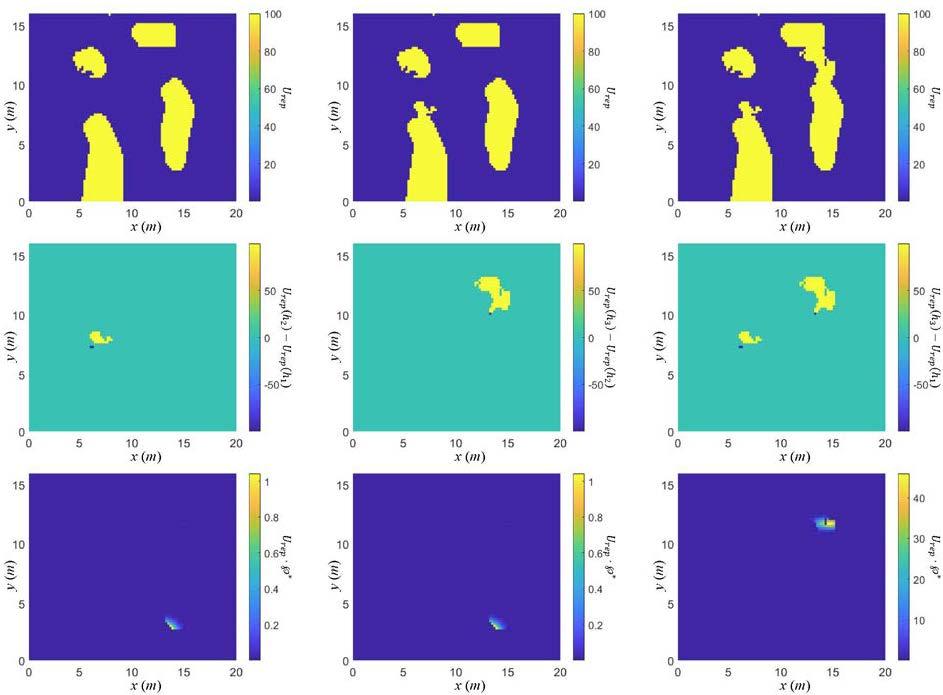
26 Simulation Results h1 h2 h3
27 Summary and Conclusions Multi-scale Adaptive Optimal Control: Recurrent relations for policy improvement and value iteration Decentralized Hilbert mapping for information fusion Communication protocols for efficient map-information spreading FISST analysis of DOC approach Performance analysis: connectivity influence on information value Environmental adaptation: adaptive value function Future Work: Stability analysis in the presence of delayed information propagation Environmental adaptation: optimize agent density over time Robustness and performance analysis 27



28 Collaborators: Pingping Zhu, Ph.D. LISC, MEMS, Duke Thomas A. Wettergren, Ph.D. Naval Undersea Warfare Center Newport, RI Julian Morelli, LISC, MAE, Cornell Collaborators: This work was funded by ONR Code
29 Invited Talk: Workshop on Informative Path Planning and Adaptive Sampling; 2018 IEEE International Conference on Robotics and Automation (ICRA 2018) Brisbane, Australia; May 21, 2018 Invited Talk: Workshop on Imaging Beyond the Visible Spectrum; SIAM Imaging Science Symposium, IS18; Bologna, Italy, June 5th 2018 G. Foderaro, S. Ferrari, T. A. Wettergren, Distributed Optimal Control of Sensor Networks for Dynamic Track Coverage," IEEE Transactions on Control of Network Systems, Vol. 5, No. 1, K. Rudd, G. Foderaro, and S. Ferrari, A Generalized Reduced Gradient Method for the Optimal Control of Very Large Scale Robotic (VLSR) Systems," IEEE Transactions on Robotics, Vol. 33, No. 5, pp , S. Ferrari, G. Foderaro, P. Zhu, and T.Wettergren Distributed Optimal Control of Multiscale Dynamical Systems: A Tutorial", Control Systems Magazine, Vol. 36, No. 2, pp , G. Foderaro, S. Ferrari, T. A. Wettergren, Distributed Optimal Control for Multiagent Trajectory Optimization, Automatica, Vol. 50, No. 1, pp , 2014.


30 Questions? Thank you 30
31 References S. Ferrari and T. A. Wettergren, Information-driven planning and Control, CRC Press, Boca Raton, FL, scheduled to appear S. Ferrari, G. Zhang, and C. Cai, A Comparison of Information Functions and Search Strategies for Sensor Planning," IEEE Transactions on Systems, Man, and Cybernetics - Part B, in press. N. Bezzo, R. Fierro, A. Swingler, and S. Ferrari, Mobile Router Networks: A Disjunctive Programming Approach, International Journal of Robotics and Automation, in press. S. Ferrari and G. Daugherty, "A Q-Learning Approach to Online Unmanned Air Vehicle (UAV) for Target Detection and Classification," Journal of Defense Modeling and Simulation, in press. G. Foderaro, V. Raju, and S. Ferrari, A Model-based Approximate λ-policy Iteration Approach to Evasive Path Planning and the Video Game Ms. Pac-Man, Journal of Control Theory and Applications, in press. S. Ferrari, G. Zhang, and T. A. Wettegren, Probabilistic Track Coverage in Cooperative Sensor Networks, IEEE Transactions on Systems, Man, and Cybernetics Part B, Vol. 40, No. 6, pp , W. Lu, G. Zhang, S. Ferrari, R. Fierro, and I. Palunko An Improved Particle Filter Approach for Multiple Target Detection and Tracking, Proc. SPIE Conference, Orlando, FL, S. Ferrari, G. Foderaro, and A. Tremblay A Probability Density Function Approach to Distributed Sensors Path Planning, Proc. IEEE Conference on Robotics and Automation, Anchorage, AK, S. Ferrari and G. Foderaro, A Potential Field Approach to Finding Minimum-Exposure Paths in Wireless Sensor Networks, Proc. IEEE Conference on Robotics and Automation, Anchorage, AK, A. Swingler and S. Ferrari, A Cell Decomposition Approach to Cooperative Path Planning and Collision Avoidance, Proc. IEEE Conference on Decision and Control, Atlanta, GA, 2010.
32 References B. Bernard and S. Ferrari, A Geometric Transversals Approach to Track Coverage of Maneuvering Targets, Proc. IEEE Conference on Decision and Control, Atlanta, GA, G. Foderaro and S. Ferrari, Necessary Conditions for Optimality for a Distributed Optimal Control Problem, Proc. IEEE Conference on Decision and Control, Atlanta, GA, W. Lu, G. Zhang, and S. Ferrari, A Randomized Hybrid System Approach to Coordinated Robotic Sensor Planning, Proc. IEEE Conference on Decision and Control, Atlanta, GA, S. Ferrari and G. Daugherty, "A Q-Learning Approach to Online Unmanned Air Vehicle (UAV) for Target Detection and Classification," Proc. SPIE Conference, Orlando, FL, April K. C. Baumgartner, S. Ferrari, and T. A. Wettergren, Robust Deployment of Ocean Sensor Networks, IEEE Sensors Journal, Vol. 9, No. 9, pp , K. C. Baumgartner, S. Ferrari, and A. Rao, Optimal Control of a Mobile Sensor Network for Cooperative Target Detection, IEEE Journal of Oceanic Engineering, Vol. 34, No. 4, pp , G. Zhang, S. Ferrari, and M. Qian, Information Roadmap Method for Robotic Sensor Path Planning, Journal of Intelligent and Robotic Systems, Vol. 56, pp , S. Ferrari, R. Fierro, B. Perteet, C. Cai, and K. C. Baumgartner, A Multi-Objective Optimization Approach to Detecting and Intercepting Dynamic Targets using Mobile Sensors, SIAM Journal on Control and Optimization, Vol. 48, No. 1, pp , S. Ferrari and C. Cai, Information-Driven Search Strategies in the Board Game of CLUE, IEEE Transactions on Systems, Man, and Cybernetics - Part B, Vol. 39, No. 3, pp , June C. Cai and S. Ferrari, Information-Driven Sensor Path Planning by Approximate Cell Decomposition, IEEE Transactions on Systems, Man, and Cybernetics - Part B, Vol. 39, No. 3, pp , June 2009.
33 References S. Ferrari, Multi-Objective Algebraic Synthesis of Neural Control Systems by Implicit Model Following, IEEE Transactions on Neural Networks, Vol. 20, No. 3, pp , March S. Ferrari, R. Fierro, and D. Tolic, "A Geometric Optimization Approach to Tracking Maneuvering Tracking Using a Heterogeneous Mobile Sensor Network," Proc. IEEE Conference on Decision and Control, Shanghai, China, December G. Zhang and S. Ferrari, "An Adaptive Artificial Potential Function Approach for Geometric Sensing," Proc. IEEE Conference on Decision and Control, Shanghai, China, December G. Di Muro and S. Ferrari, "Penalty Function Method for Exploratory Adaptive-Critic Neural Network Control," Proc. Mediterranean Conference on Control and Automation (MED'09), Thessaloniki, Greece, January 2009, pp D. Tolic, R. Fierro, and S. Ferrari, "Cooperative multi-target tracking via hybrid modeling and geo- metric optimization," Proc. Mediterranean Conference on Control and Automation (MED'09), Thessaloniki, Greece, January 2009, pp Ferrari S., Steck J. E, and Chandramohan R., Adaptive Feedback Control by Constrained Approximate Dynamic Programming, IEEE Transactions on Systems, Man, and Cybernetics - Part B: Cybernetics, Vol. 38, No. 4, pp , August Baumgartner, K. C., and Ferrari, S., A Geometric Approach to Analyzing Track Coverage in Sensor Networks, IEEE Transactions on Computer, Vol. 57, No. 8, pp , August S. Ferrari and A. Vaghi, Demining Sensor Modeling and Feature-level Fusion by Bayesian Networks, IEEE Sensors Journal, Vol. 6, No. 2, pp , April PDFs AVAILABLE UPON REQUEST: ferrari@cornell.edu

34 Backup Slides 34
35 Motivation: Multi-scale Adaptive Control Environmental and operating conditions in situ may drastically differ those used a priori Off-line DOC solutions no longer optimal Agents must react to local information, including new tactical constraints Network-level controller can dispatch agents to localize gradient intensification while providing energy management, volume coverage, and robustness to component failure A-priori obstacle information Actual in situ obstacles Obstacle y (km) y (km) 35 x (km) x (km)

![Inertial position Pitch and yaw Euler angles Robot Control: u = δ, δ, δ ] [ rpm r](/docs-images/95/122578359/images/36-4.jpg "s z UUV kinematics: x = v y = v z = v B B B θ = g δ θ (cosθ cosψ ) + v (cosθ sinψ")

36 Motivation: Oceanographic Conditions x = f ( x, u, t) Full, nonlinear dynamics Robot state: x = [ x, y, z, θ, ψ, x, y, z, θ, ψ ] T A-priori current estimates: Inertial position Pitch and yaw Euler angles Robot Control: u = δ, δ, δ ] [ rpm r s z UUV kinematics: x = v y = v z = v B B B θ = g δ θ (cosθ cosψ ) + v (cosθ sinψ ) + v r ψ = g δ ψ ( sinθ ) s cx cy x Actual currents: y z v B : measured velocity ν cx, ν cy : measured ocean current x and y velocities g θ, g ψ : control gains x y 36

 37 2 Region of Interest W R : Fixed, unknown, rigid")
37 Problem Formulation Mission Goal: Collectively explore and map obstacles and currents in a region of interest W while obtaining decentralized sensor measurements, avoiding obstacles, and communicating with other agents and a central station. Obstacle Agent ith Agent y (km) 37 2 Region of Interest W R : Fixed, unknown, rigid obstacles, B i, i=1,,r N agents x (km)
![On-board Sensor Measurements Sensor can infer classification Yˆ within sensor range and construct D = {x, y } i j j m Noisy sensor measurements: x M = x Zˆ = [ˆ x M i + Deˆ, Yˆ] Y is a random and](/docs-images/95/122578359/images/38-3.jpg "binary classification variable: r Obstacle B Y ( x) = 1,if 0, if x B x B 38 D = d + ν : Distance measurement Θ = θ + υ : Angle measurement ν ~ N(0,σ d ): Sample from normal distribution υ ~ N(0, σ θ")
38 On-board Sensor Measurements Sensor can infer classification Yˆ within sensor range and construct D = {x, y } i j j m Noisy sensor measurements: x M = x Zˆ = [ˆ x M i + Deˆ, Yˆ] Y is a random and binary classification variable: r Obstacle B Y ( x) = 1,if 0, if x B x B 38 D = d + ν : Distance measurement Θ = θ + υ : Angle measurement ν ~ N(0,σ d ): Sample from normal distribution υ ~ N(0, σ θ ): Sample from normal distribution eˆ r = xˆ cosθ + yˆ sin Θ : radial unit vector xˆ, yˆ : unit vectors of basis in F A Sensor readings Maximum Sensor Range d max Hit/Occupied Miss/Not Occupied
39 On-board Sensing and Communications Sensing goal: maximize information gain of future measurements to minimize uncertainty Mission constraints: Bounded sensor FOV range, R Bounded communication range, R c Multiobjective Cost Function: J = ˆ ϕ( Y ; Z M, λ) dx + + W T f { T [ ] } U xi( t) ui( t) Rui( t) Bayesian measurement model: p( Z Y, λ) T 0 dt Body Frame Inertial frame 39 ˆ ϕ( ) : Information gain Y, Z: hidden discrete random variables M: set of all prior measurements λ: environmental condition parameters U(x i ): obstacle repulsion potential R: control weight matrix


40 An Illustrative DOC Example 40
41 Value Function Approximation Consider the training data set = {(,, )} N and the testing data set i h i i= 1 = {(,, )} N i h i n= 1 The training and the testing data sets are all generated by the same control law C(). The goal of value function approximation is to approximate an operator (,) from the 0 training data set and predict the evaluation of the value function in the testing data set 0 First, consider that the Hilbert map function h is fixed. Then, the approximation of the value function can be expressed by 0 0 ( = ) (, h ) h To learn the operator, a new kernel least squares temporal difference (KLSTD) algorithm is proposed based on a functional kernel, which is defined as follows: 2 i j i, i 2 i j + j, j k( i, j) exp = = exp σ σ 2 2 where the inner product is defined by i, j = i( x) j( x) dx 41
42 Value Function Approximation Let ( ) k(,) denote the kernel feature map and Φ= k( 1,),, k( N,) denote the 0 feature matrix. Then, according to the KLSTD algorithm, the value function (, h ) is approximated by 1 0 ( ) ( ) T T T = k H HKH KL Here, 1 γ 0 0 k( 1, 1) k( 1, ) N 0 1 γ 0 T K = =ΦΦ H = k( N, 1) k( N, N) γ and T L = [ 1, h0, (,) ],, [ N, h0, (,) ] Therefore, the approximated value function can be expressed by where φ = [ ] 0 φ ( ) T T ( Φ ) = ( ) 1 h ( ) 1 T T T 0 T 0 h ( ) = ( ) ΦH HKH KL( Φ, h ) = φ( ) ΦF( Φ) L( Φ, h ) F H HKH K 0 Furthermore, if the Hilbert map h is varying, then the approximated value function with two function arguments can be expressed by 42 (, ) ( ) T h = φ ΦF ( Φ ) L ( Φ, h )
43 Simulation Results Actual environment The environment is approximated by Hilbert map h. The Hilbert map is updated by the new measurements obtained by a group of agents Idea environment The idea environment is assumed to be known in advance. The trajectory of optimal agent distributions, ( k), k = 1,...,600, is obtained by the DOC method.
44 Simulation Results
ONR Mine Warfare Autonomy Virtual Program Review September 7, 2017
 ONR Mine Warfare Autonomy Virtual Program Review September 7, 2017 Information-driven Guidance and Control for Adaptive Target Detection and Classification Silvia Ferrari Pingping Zhu and Bo Fu Mechanical
ONR Mine Warfare Autonomy Virtual Program Review September 7, 2017 Information-driven Guidance and Control for Adaptive Target Detection and Classification Silvia Ferrari Pingping Zhu and Bo Fu Mechanical
Multiscale Adaptive Sensor Systems
 Multiscale Adaptive Sensor Systems Silvia Ferrari Sibley School of Mechanical and Aerospace Engineering Cornell University ONR Maritime Sensing D&I Review Naval Surface Warfare Center, Carderock 9-11 August
Multiscale Adaptive Sensor Systems Silvia Ferrari Sibley School of Mechanical and Aerospace Engineering Cornell University ONR Maritime Sensing D&I Review Naval Surface Warfare Center, Carderock 9-11 August
Probability Map Building of Uncertain Dynamic Environments with Indistinguishable Obstacles
 Probability Map Building of Uncertain Dynamic Environments with Indistinguishable Obstacles Myungsoo Jun and Raffaello D Andrea Sibley School of Mechanical and Aerospace Engineering Cornell University
Probability Map Building of Uncertain Dynamic Environments with Indistinguishable Obstacles Myungsoo Jun and Raffaello D Andrea Sibley School of Mechanical and Aerospace Engineering Cornell University
Value Function Approximation for the Control of Multiscale Dynamical Systems
 2016 IEEE 55th Conference on Decision and Control (CDC) ARIA Resort & Casino December 12-14, 2016, Las Vegas, USA Value Function Approximation for the Control of Multiscale Dynamical Systems Pingping Zhu,
2016 IEEE 55th Conference on Decision and Control (CDC) ARIA Resort & Casino December 12-14, 2016, Las Vegas, USA Value Function Approximation for the Control of Multiscale Dynamical Systems Pingping Zhu,
UAV Navigation: Airborne Inertial SLAM
 Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in
Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in
Sensor Tasking and Control
 Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
Decentralized Control of Nonlinear Multi-Agent Systems Using Single Network Adaptive Critics
 Decentralized Control of Nonlinear Multi-Agent Systems Using Single Network Adaptive Critics Ali Heydari Mechanical & Aerospace Engineering Dept. Missouri University of Science and Technology Rolla, MO,
Decentralized Control of Nonlinear Multi-Agent Systems Using Single Network Adaptive Critics Ali Heydari Mechanical & Aerospace Engineering Dept. Missouri University of Science and Technology Rolla, MO,
VEHICLE WHEEL-GROUND CONTACT ANGLE ESTIMATION: WITH APPLICATION TO MOBILE ROBOT TRACTION CONTROL
 1/10 IAGNEMMA AND DUBOWSKY VEHICLE WHEEL-GROUND CONTACT ANGLE ESTIMATION: WITH APPLICATION TO MOBILE ROBOT TRACTION CONTROL K. IAGNEMMA S. DUBOWSKY Massachusetts Institute of Technology, Cambridge, MA
1/10 IAGNEMMA AND DUBOWSKY VEHICLE WHEEL-GROUND CONTACT ANGLE ESTIMATION: WITH APPLICATION TO MOBILE ROBOT TRACTION CONTROL K. IAGNEMMA S. DUBOWSKY Massachusetts Institute of Technology, Cambridge, MA
A Probability Density Function Approach to Distributed Sensors Path Planning
 2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA A Probability Density Function Approach to Distributed Sensors Path Planning
2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA A Probability Density Function Approach to Distributed Sensors Path Planning
Neuromorphic Sensing and Control of Autonomous Micro-Aerial Vehicles
 Neuromorphic Sensing and Control of Autonomous Micro-Aerial Vehicles Commercialization Fellowship Technical Presentation Taylor Clawson Ithaca, NY June 12, 2018 About Me: Taylor Clawson 3 rd year PhD student
Neuromorphic Sensing and Control of Autonomous Micro-Aerial Vehicles Commercialization Fellowship Technical Presentation Taylor Clawson Ithaca, NY June 12, 2018 About Me: Taylor Clawson 3 rd year PhD student
Cooperative Control and Mobile Sensor Networks
 Cooperative Control and Mobile Sensor Networks Cooperative Control, Part I, D-F Naomi Ehrich Leonard Mechanical and Aerospace Engineering Princeton University and Electrical Systems and Automation University
Cooperative Control and Mobile Sensor Networks Cooperative Control, Part I, D-F Naomi Ehrich Leonard Mechanical and Aerospace Engineering Princeton University and Electrical Systems and Automation University
Awareness-Based Decision Making for Search and Tracking
 28 American Control Conference Westin Seattle Hotel, Seattle, Washington, USA June 11-13, 28 ThC7.6 Awareness-Based Decision Making for Search and Tracking Y. Wang, I. I. Hussein, R. Scott Erwin Abstract
28 American Control Conference Westin Seattle Hotel, Seattle, Washington, USA June 11-13, 28 ThC7.6 Awareness-Based Decision Making for Search and Tracking Y. Wang, I. I. Hussein, R. Scott Erwin Abstract
Learning Gaussian Process Models from Uncertain Data
 Learning Gaussian Process Models from Uncertain Data Patrick Dallaire, Camille Besse, and Brahim Chaib-draa DAMAS Laboratory, Computer Science & Software Engineering Department, Laval University, Canada
Learning Gaussian Process Models from Uncertain Data Patrick Dallaire, Camille Besse, and Brahim Chaib-draa DAMAS Laboratory, Computer Science & Software Engineering Department, Laval University, Canada
Nonlinear Landing Control for Quadrotor UAVs
 Nonlinear Landing Control for Quadrotor UAVs Holger Voos University of Applied Sciences Ravensburg-Weingarten, Mobile Robotics Lab, D-88241 Weingarten Abstract. Quadrotor UAVs are one of the most preferred
Nonlinear Landing Control for Quadrotor UAVs Holger Voos University of Applied Sciences Ravensburg-Weingarten, Mobile Robotics Lab, D-88241 Weingarten Abstract. Quadrotor UAVs are one of the most preferred
Target Tracking and Obstacle Avoidance for Multi-agent Systems
 International Journal of Automation and Computing 7(4), November 2010, 550-556 DOI: 10.1007/s11633-010-0539-z Target Tracking and Obstacle Avoidance for Multi-agent Systems Jing Yan 1 Xin-Ping Guan 1,2
International Journal of Automation and Computing 7(4), November 2010, 550-556 DOI: 10.1007/s11633-010-0539-z Target Tracking and Obstacle Avoidance for Multi-agent Systems Jing Yan 1 Xin-Ping Guan 1,2
10 Robotic Exploration and Information Gathering
 NAVARCH/EECS 568, ROB 530 - Winter 2018 10 Robotic Exploration and Information Gathering Maani Ghaffari April 2, 2018 Robotic Information Gathering: Exploration and Monitoring In information gathering
NAVARCH/EECS 568, ROB 530 - Winter 2018 10 Robotic Exploration and Information Gathering Maani Ghaffari April 2, 2018 Robotic Information Gathering: Exploration and Monitoring In information gathering
arxiv: v2 [cs.ro] 9 May 2017
![arxiv: v2 [cs.ro] 9 May 2017](/thumbs/94/121711531.jpg "arxiv: v2 [cs.ro] 9 May 2017") Distributed Formation Control of Nonholonomic Mobile Robots by Bounded Feedback in the Presence of Obstacles Thang Nguyen and Hung M. La arxiv:174.4566v2 [cs.ro] 9 May 217 Abstract The problem of distributed
Distributed Formation Control of Nonholonomic Mobile Robots by Bounded Feedback in the Presence of Obstacles Thang Nguyen and Hung M. La arxiv:174.4566v2 [cs.ro] 9 May 217 Abstract The problem of distributed
INFORMATION-DRIVEN SENSOR PATH PLANNING AND THE TREASURE HUNT PROBLEM
 INFORMATION-DRIVEN SENSOR PATH PLANNING AND THE TREASURE HUNT PROBLEM by Chenghui Cai Department of Mechanical Engineering and Materials Science Duke University Date: Approved: Silvia Ferrari, Ph.D., Supervisor
INFORMATION-DRIVEN SENSOR PATH PLANNING AND THE TREASURE HUNT PROBLEM by Chenghui Cai Department of Mechanical Engineering and Materials Science Duke University Date: Approved: Silvia Ferrari, Ph.D., Supervisor
A Sliding Mode Control based on Nonlinear Disturbance Observer for the Mobile Manipulator
 International Core Journal of Engineering Vol.3 No.6 7 ISSN: 44-895 A Sliding Mode Control based on Nonlinear Disturbance Observer for the Mobile Manipulator Yanna Si Information Engineering College Henan
International Core Journal of Engineering Vol.3 No.6 7 ISSN: 44-895 A Sliding Mode Control based on Nonlinear Disturbance Observer for the Mobile Manipulator Yanna Si Information Engineering College Henan
An Optimal Tracking Approach to Formation Control of Nonlinear Multi-Agent Systems
 AIAA Guidance, Navigation, and Control Conference 13-16 August 212, Minneapolis, Minnesota AIAA 212-4694 An Optimal Tracking Approach to Formation Control of Nonlinear Multi-Agent Systems Ali Heydari 1
AIAA Guidance, Navigation, and Control Conference 13-16 August 212, Minneapolis, Minnesota AIAA 212-4694 An Optimal Tracking Approach to Formation Control of Nonlinear Multi-Agent Systems Ali Heydari 1
Target Tracking and Obstacle Avoidance for Multi-agent Networks with Input Constraints
 International Journal of Automation and Computing 8(1), February 2011, 46-53 DOI: 10.1007/s11633-010-0553-1 Target Tracking and Obstacle Avoidance for Multi-agent Networks with Input Constraints Jing Yan
International Journal of Automation and Computing 8(1), February 2011, 46-53 DOI: 10.1007/s11633-010-0553-1 Target Tracking and Obstacle Avoidance for Multi-agent Networks with Input Constraints Jing Yan
Cooperative Control and Mobile Sensor Networks
 Cooperative Control and Mobile Sensor Networks Cooperative Control, Part I, A-C Naomi Ehrich Leonard Mechanical and Aerospace Engineering Princeton University and Electrical Systems and Automation University
Cooperative Control and Mobile Sensor Networks Cooperative Control, Part I, A-C Naomi Ehrich Leonard Mechanical and Aerospace Engineering Princeton University and Electrical Systems and Automation University
A Residual Gradient Fuzzy Reinforcement Learning Algorithm for Differential Games
 International Journal of Fuzzy Systems manuscript (will be inserted by the editor) A Residual Gradient Fuzzy Reinforcement Learning Algorithm for Differential Games Mostafa D Awheda Howard M Schwartz Received:
International Journal of Fuzzy Systems manuscript (will be inserted by the editor) A Residual Gradient Fuzzy Reinforcement Learning Algorithm for Differential Games Mostafa D Awheda Howard M Schwartz Received:
Provably Correct Persistent Surveillance for Unmanned Aerial Vehicles Subject to Charging Constraints
 Provably Correct Persistent Surveillance for Unmanned Aerial Vehicles Subject to Charging Constraints Kevin Leahy, Dingjiang Zhou, Cristian-Ioan Vasile, Konstantinos Oikonomopoulos, Mac Schwager, and Calin
Provably Correct Persistent Surveillance for Unmanned Aerial Vehicles Subject to Charging Constraints Kevin Leahy, Dingjiang Zhou, Cristian-Ioan Vasile, Konstantinos Oikonomopoulos, Mac Schwager, and Calin
Hybrid multi-bernoulli CPHD filter for superpositional sensors
 Hybrid multi-bernoulli CPHD filter for superpositional sensors Santosh Nannuru and Mark Coates McGill University, Montreal, Canada ABSTRACT We propose, for the superpositional sensor scenario, a hybrid
Hybrid multi-bernoulli CPHD filter for superpositional sensors Santosh Nannuru and Mark Coates McGill University, Montreal, Canada ABSTRACT We propose, for the superpositional sensor scenario, a hybrid
Multi-Robotic Systems
 CHAPTER 9 Multi-Robotic Systems The topic of multi-robotic systems is quite popular now. It is believed that such systems can have the following benefits: Improved performance ( winning by numbers ) Distributed
CHAPTER 9 Multi-Robotic Systems The topic of multi-robotic systems is quite popular now. It is believed that such systems can have the following benefits: Improved performance ( winning by numbers ) Distributed
Formation Control of Mobile Robots with Obstacle Avoidance using Fuzzy Artificial Potential Field
 Formation Control of Mobile Robots with Obstacle Avoidance using Fuzzy Artificial Potential Field Abbas Chatraei Department of Electrical Engineering, Najafabad Branch, Islamic Azad University, Najafabad,
Formation Control of Mobile Robots with Obstacle Avoidance using Fuzzy Artificial Potential Field Abbas Chatraei Department of Electrical Engineering, Najafabad Branch, Islamic Azad University, Najafabad,
Decentralized Stabilization of Heterogeneous Linear Multi-Agent Systems
 1 Decentralized Stabilization of Heterogeneous Linear Multi-Agent Systems Mauro Franceschelli, Andrea Gasparri, Alessandro Giua, and Giovanni Ulivi Abstract In this paper the formation stabilization problem
1 Decentralized Stabilization of Heterogeneous Linear Multi-Agent Systems Mauro Franceschelli, Andrea Gasparri, Alessandro Giua, and Giovanni Ulivi Abstract In this paper the formation stabilization problem
Distributed estimation in sensor networks
 in sensor networks A. Benavoli Dpt. di Sistemi e Informatica Università di Firenze, Italy. e-mail: benavoli@dsi.unifi.it Outline 1 An introduction to 2 3 An introduction to An introduction to In recent
in sensor networks A. Benavoli Dpt. di Sistemi e Informatica Università di Firenze, Italy. e-mail: benavoli@dsi.unifi.it Outline 1 An introduction to 2 3 An introduction to An introduction to In recent
Many complex systems, ranging from renewable resources [1] to very-large-scale. Distributed Optimal Control of Multiscale Dynamical Systems
![Many complex systems, ranging from renewable resources [1] to very-large-scale. Distributed Optimal Control of Multiscale Dynamical Systems](/thumbs/84/91023626.jpg "Many complex systems, ranging from renewable resources [1] to very-large-scale. Distributed Optimal Control of Multiscale Dynamical Systems") Distributed Optimal Control of Multiscale Dynamical Systems A Tutorial Silvia Ferrari, Greg Foderaro, Pingping Zhu, and Thomas A. Wettergren Many complex systems, ranging from renewable resources [1] to
Distributed Optimal Control of Multiscale Dynamical Systems A Tutorial Silvia Ferrari, Greg Foderaro, Pingping Zhu, and Thomas A. Wettergren Many complex systems, ranging from renewable resources [1] to
Path Planning for Time-Optimal Information Collection
 Path Planning for Time-Optimal Information Collection Andy Klesh University of Michigan April 2, 2008 Motivation Motivation Problem Many Intelligence, Surveillance and Reconnaissance (ISR) Missions require
Path Planning for Time-Optimal Information Collection Andy Klesh University of Michigan April 2, 2008 Motivation Motivation Problem Many Intelligence, Surveillance and Reconnaissance (ISR) Missions require
A Decentralized Approach to Multi-agent Planning in the Presence of Constraints and Uncertainty
 2011 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-13, 2011, Shanghai, China A Decentralized Approach to Multi-agent Planning in the Presence of
2011 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-13, 2011, Shanghai, China A Decentralized Approach to Multi-agent Planning in the Presence of
An Information-driven Approach. for Sensor Path Planning
 An Information-driven Approach for Sensor Path Planning by Wenjie Lu Department of Mechanical Engineering and Materials Science Duke University Date: Approved: Silvia Ferrari, Supervisor Devendra P Garg
An Information-driven Approach for Sensor Path Planning by Wenjie Lu Department of Mechanical Engineering and Materials Science Duke University Date: Approved: Silvia Ferrari, Supervisor Devendra P Garg
Anytime Planning for Decentralized Multi-Robot Active Information Gathering
 Anytime Planning for Decentralized Multi-Robot Active Information Gathering Brent Schlotfeldt 1 Dinesh Thakur 1 Nikolay Atanasov 2 Vijay Kumar 1 George Pappas 1 1 GRASP Laboratory University of Pennsylvania
Anytime Planning for Decentralized Multi-Robot Active Information Gathering Brent Schlotfeldt 1 Dinesh Thakur 1 Nikolay Atanasov 2 Vijay Kumar 1 George Pappas 1 1 GRASP Laboratory University of Pennsylvania
A Novel Situation Awareness Model for Network Systems Security
 A Novel Situation Awareness Model for Network Systems Security Guosheng Zhao 1,2, Huiqiang Wang 1, Jian Wang 1, and Linshan Shen 1 1 Institute of Computer Science and echnology, Harbin Engineer University,
A Novel Situation Awareness Model for Network Systems Security Guosheng Zhao 1,2, Huiqiang Wang 1, Jian Wang 1, and Linshan Shen 1 1 Institute of Computer Science and echnology, Harbin Engineer University,
Necessary Conditions for Optimality for a Distributed Optimal Control Problem
 49th IEEE Conference on Decision and Control December 15-17, 2010 Hilton tlanta Hotel, tlanta, G, US Necessary Conditions for Optimality for a Distributed Optimal Control Problem Greg Foderaro, Silvia
49th IEEE Conference on Decision and Control December 15-17, 2010 Hilton tlanta Hotel, tlanta, G, US Necessary Conditions for Optimality for a Distributed Optimal Control Problem Greg Foderaro, Silvia
Autonomous Helicopter Flight via Reinforcement Learning
 Autonomous Helicopter Flight via Reinforcement Learning Authors: Andrew Y. Ng, H. Jin Kim, Michael I. Jordan, Shankar Sastry Presenters: Shiv Ballianda, Jerrolyn Hebert, Shuiwang Ji, Kenley Malveaux, Huy
Autonomous Helicopter Flight via Reinforcement Learning Authors: Andrew Y. Ng, H. Jin Kim, Michael I. Jordan, Shankar Sastry Presenters: Shiv Ballianda, Jerrolyn Hebert, Shuiwang Ji, Kenley Malveaux, Huy
Explorability of a Turbulent Scalar Field
 017 American Control Conference Sheraton Seattle Hotel May 4 6, 017, Seattle, USA Explorability of a Turbulent Scalar Field Vivek Mishra and Fumin Zhang Abstract In this paper we extend the concept of
017 American Control Conference Sheraton Seattle Hotel May 4 6, 017, Seattle, USA Explorability of a Turbulent Scalar Field Vivek Mishra and Fumin Zhang Abstract In this paper we extend the concept of
Multi-layer Flight Control Synthesis and Analysis of a Small-scale UAV Helicopter
 Multi-layer Flight Control Synthesis and Analysis of a Small-scale UAV Helicopter Ali Karimoddini, Guowei Cai, Ben M. Chen, Hai Lin and Tong H. Lee Graduate School for Integrative Sciences and Engineering,
Multi-layer Flight Control Synthesis and Analysis of a Small-scale UAV Helicopter Ali Karimoddini, Guowei Cai, Ben M. Chen, Hai Lin and Tong H. Lee Graduate School for Integrative Sciences and Engineering,
CONTROL OF ROBOT CAMERA SYSTEM WITH ACTUATOR S DYNAMICS TO TRACK MOVING OBJECT
 Journal of Computer Science and Cybernetics, V.31, N.3 (2015), 255 265 DOI: 10.15625/1813-9663/31/3/6127 CONTROL OF ROBOT CAMERA SYSTEM WITH ACTUATOR S DYNAMICS TO TRACK MOVING OBJECT NGUYEN TIEN KIEM
Journal of Computer Science and Cybernetics, V.31, N.3 (2015), 255 265 DOI: 10.15625/1813-9663/31/3/6127 CONTROL OF ROBOT CAMERA SYSTEM WITH ACTUATOR S DYNAMICS TO TRACK MOVING OBJECT NGUYEN TIEN KIEM
RESEARCH SUMMARY ASHKAN JASOUR. February 2016
 RESEARCH SUMMARY ASHKAN JASOUR February 2016 My background is in systems control engineering and I am interested in optimization, control and analysis of dynamical systems, robotics, machine learning,
RESEARCH SUMMARY ASHKAN JASOUR February 2016 My background is in systems control engineering and I am interested in optimization, control and analysis of dynamical systems, robotics, machine learning,
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
Distributed Robust Localization from Arbitrary Initial Poses via EM and Model Selection
 1 Distributed Robust Localization from Arbitrary Initial Poses via EM and Model Selection Vadim Indelman Collaborators: Erik Nelson, Jing Dong, Nathan Michael and Frank Dellaert IACAS, February 15 Collaborative
1 Distributed Robust Localization from Arbitrary Initial Poses via EM and Model Selection Vadim Indelman Collaborators: Erik Nelson, Jing Dong, Nathan Michael and Frank Dellaert IACAS, February 15 Collaborative
SDRE BASED LEADER-FOLLOWER FORMATION CONTROL OF MULTIPLE MOBILE ROBOTS
 SDRE BASED EADER-FOOWER FORMAION CONRO OF MUIPE MOBIE ROBOS Caio Igor Gonçalves Chinelato, uiz S. Martins-Filho Universidade Federal do ABC - UFABC Av. dos Estados, 5001, Bangu, 09210-971, Santo André,
SDRE BASED EADER-FOOWER FORMAION CONRO OF MUIPE MOBIE ROBOS Caio Igor Gonçalves Chinelato, uiz S. Martins-Filho Universidade Federal do ABC - UFABC Av. dos Estados, 5001, Bangu, 09210-971, Santo André,
Wheelchair Collision Avoidance: An Application for Differential Games
 Wheelchair Collision Avoidance: An Application for Differential Games Pooja Viswanathan December 27, 2006 Abstract This paper discusses the design of intelligent wheelchairs that avoid obstacles using
Wheelchair Collision Avoidance: An Application for Differential Games Pooja Viswanathan December 27, 2006 Abstract This paper discusses the design of intelligent wheelchairs that avoid obstacles using
Learning Tetris. 1 Tetris. February 3, 2009
 Learning Tetris Matt Zucker Andrew Maas February 3, 2009 1 Tetris The Tetris game has been used as a benchmark for Machine Learning tasks because its large state space (over 2 200 cell configurations are
Learning Tetris Matt Zucker Andrew Maas February 3, 2009 1 Tetris The Tetris game has been used as a benchmark for Machine Learning tasks because its large state space (over 2 200 cell configurations are
Graph rigidity-based formation control of planar multi-agent systems
 Louisiana State University LSU Digital Commons LSU Doctoral Dissertations Graduate School 213 Graph rigidity-based formation control of planar multi-agent systems Xiaoyu Cai Louisiana State University
Louisiana State University LSU Digital Commons LSU Doctoral Dissertations Graduate School 213 Graph rigidity-based formation control of planar multi-agent systems Xiaoyu Cai Louisiana State University
An Evaluation of UAV Path Following Algorithms
 213 European Control Conference (ECC) July 17-19, 213, Zürich, Switzerland. An Evaluation of UAV Following Algorithms P.B. Sujit, Srikanth Saripalli, J.B. Sousa Abstract following is the simplest desired
213 European Control Conference (ECC) July 17-19, 213, Zürich, Switzerland. An Evaluation of UAV Following Algorithms P.B. Sujit, Srikanth Saripalli, J.B. Sousa Abstract following is the simplest desired
Dynamic Data Modeling, Recognition, and Synthesis. Rui Zhao Thesis Defense Advisor: Professor Qiang Ji
 Dynamic Data Modeling, Recognition, and Synthesis Rui Zhao Thesis Defense Advisor: Professor Qiang Ji Contents Introduction Related Work Dynamic Data Modeling & Analysis Temporal localization Insufficient
Dynamic Data Modeling, Recognition, and Synthesis Rui Zhao Thesis Defense Advisor: Professor Qiang Ji Contents Introduction Related Work Dynamic Data Modeling & Analysis Temporal localization Insufficient
Target Localization and Circumnavigation Using Bearing Measurements in 2D
 Target Localization and Circumnavigation Using Bearing Measurements in D Mohammad Deghat, Iman Shames, Brian D. O. Anderson and Changbin Yu Abstract This paper considers the problem of localization and
Target Localization and Circumnavigation Using Bearing Measurements in D Mohammad Deghat, Iman Shames, Brian D. O. Anderson and Changbin Yu Abstract This paper considers the problem of localization and
Miscellaneous. Regarding reading materials. Again, ask questions (if you have) and ask them earlier
 and ask them earlier") Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Model Reference Adaptive Control of Underwater Robotic Vehicle in Plane Motion
 Proceedings of the 11th WSEAS International Conference on SSTEMS Agios ikolaos Crete Island Greece July 23-25 27 38 Model Reference Adaptive Control of Underwater Robotic Vehicle in Plane Motion j.garus@amw.gdynia.pl
Proceedings of the 11th WSEAS International Conference on SSTEMS Agios ikolaos Crete Island Greece July 23-25 27 38 Model Reference Adaptive Control of Underwater Robotic Vehicle in Plane Motion j.garus@amw.gdynia.pl
Distributed Structural Stabilization and Tracking for Formations of Dynamic Multi-Agents
 CDC02-REG0736 Distributed Structural Stabilization and Tracking for Formations of Dynamic Multi-Agents Reza Olfati-Saber Richard M Murray California Institute of Technology Control and Dynamical Systems
CDC02-REG0736 Distributed Structural Stabilization and Tracking for Formations of Dynamic Multi-Agents Reza Olfati-Saber Richard M Murray California Institute of Technology Control and Dynamical Systems
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Sensor Localization and Target Estimation in Visual Sensor Networks
 Annual Schedule of my Research Sensor Localization and Target Estimation in Visual Sensor Networks Survey and Problem Settings Presented in the FL seminar on May th First Trial and Evaluation of Proposed
Annual Schedule of my Research Sensor Localization and Target Estimation in Visual Sensor Networks Survey and Problem Settings Presented in the FL seminar on May th First Trial and Evaluation of Proposed
Cooperative Motion Control of Multiple Autonomous Marine
 Cooperative Motion Control of Multiple Autonomous Marine Collision Avoidance in Dynamic Environments EECI Graduate School on Control Supélec, Feb. 21-25, 2011 Outline Motivation/Objectives Cooperative
Cooperative Motion Control of Multiple Autonomous Marine Collision Avoidance in Dynamic Environments EECI Graduate School on Control Supélec, Feb. 21-25, 2011 Outline Motivation/Objectives Cooperative
Nonlinear Tracking Control of Underactuated Surface Vessel
 American Control Conference June -. Portland OR USA FrB. Nonlinear Tracking Control of Underactuated Surface Vessel Wenjie Dong and Yi Guo Abstract We consider in this paper the tracking control problem
American Control Conference June -. Portland OR USA FrB. Nonlinear Tracking Control of Underactuated Surface Vessel Wenjie Dong and Yi Guo Abstract We consider in this paper the tracking control problem
Multiple Model Cardinalized Probability Hypothesis Density Filter
 Multiple Model Cardinalized Probability Hypothesis Density Filter Ramona Georgescu a and Peter Willett a a Elec. and Comp. Engineering Department, University of Connecticut, Storrs, CT 06269 {ramona, willett}@engr.uconn.edu
Multiple Model Cardinalized Probability Hypothesis Density Filter Ramona Georgescu a and Peter Willett a a Elec. and Comp. Engineering Department, University of Connecticut, Storrs, CT 06269 {ramona, willett}@engr.uconn.edu
BAYESIAN MULTI-TARGET TRACKING WITH SUPERPOSITIONAL MEASUREMENTS USING LABELED RANDOM FINITE SETS. Francesco Papi and Du Yong Kim
 3rd European Signal Processing Conference EUSIPCO BAYESIAN MULTI-TARGET TRACKING WITH SUPERPOSITIONAL MEASUREMENTS USING LABELED RANDOM FINITE SETS Francesco Papi and Du Yong Kim Department of Electrical
3rd European Signal Processing Conference EUSIPCO BAYESIAN MULTI-TARGET TRACKING WITH SUPERPOSITIONAL MEASUREMENTS USING LABELED RANDOM FINITE SETS Francesco Papi and Du Yong Kim Department of Electrical
Three-Dimensional Motion Coordination in a Time-Invariant Flowfield
 To appear in Proc. 48th IEEE CDC Three-Dimensional Motion Coordination in a Time-Invariant Flowfield Sonia Hernandez and Dere A. Paley Abstract Three-dimensional motion coordination in a flowfield has
To appear in Proc. 48th IEEE CDC Three-Dimensional Motion Coordination in a Time-Invariant Flowfield Sonia Hernandez and Dere A. Paley Abstract Three-dimensional motion coordination in a flowfield has
Tactical Ballistic Missile Tracking using the Interacting Multiple Model Algorithm
 Tactical Ballistic Missile Tracking using the Interacting Multiple Model Algorithm Robert L Cooperman Raytheon Co C 3 S Division St Petersburg, FL Robert_L_Cooperman@raytheoncom Abstract The problem of
Tactical Ballistic Missile Tracking using the Interacting Multiple Model Algorithm Robert L Cooperman Raytheon Co C 3 S Division St Petersburg, FL Robert_L_Cooperman@raytheoncom Abstract The problem of
Introduction to Reinforcement Learning. CMPT 882 Mar. 18
 Introduction to Reinforcement Learning CMPT 882 Mar. 18 Outline for the week Basic ideas in RL Value functions and value iteration Policy evaluation and policy improvement Model-free RL Monte-Carlo and
Introduction to Reinforcement Learning CMPT 882 Mar. 18 Outline for the week Basic ideas in RL Value functions and value iteration Policy evaluation and policy improvement Model-free RL Monte-Carlo and
A NOVEL OPTIMAL PROBABILITY DENSITY FUNCTION TRACKING FILTER DESIGN 1
 A NOVEL OPTIMAL PROBABILITY DENSITY FUNCTION TRACKING FILTER DESIGN 1 Jinglin Zhou Hong Wang, Donghua Zhou Department of Automation, Tsinghua University, Beijing 100084, P. R. China Control Systems Centre,
A NOVEL OPTIMAL PROBABILITY DENSITY FUNCTION TRACKING FILTER DESIGN 1 Jinglin Zhou Hong Wang, Donghua Zhou Department of Automation, Tsinghua University, Beijing 100084, P. R. China Control Systems Centre,
Sean Escola. Center for Theoretical Neuroscience
 Employing hidden Markov models of neural spike-trains toward the improved estimation of linear receptive fields and the decoding of multiple firing regimes Sean Escola Center for Theoretical Neuroscience
Employing hidden Markov models of neural spike-trains toward the improved estimation of linear receptive fields and the decoding of multiple firing regimes Sean Escola Center for Theoretical Neuroscience
A Blade Element Approach to Modeling Aerodynamic Flight of an Insect-scale Robot
 A Blade Element Approach to Modeling Aerodynamic Flight of an Insect-scale Robot Taylor S. Clawson, Sawyer B. Fuller Robert J. Wood, Silvia Ferrari American Control Conference Seattle, WA May 25, 2016
A Blade Element Approach to Modeling Aerodynamic Flight of an Insect-scale Robot Taylor S. Clawson, Sawyer B. Fuller Robert J. Wood, Silvia Ferrari American Control Conference Seattle, WA May 25, 2016
Active Information Gathering
 Autonomous Sensor Path Planning and Control for Active Information Gathering by Wenjie Lu Department of Mechanical Engineering and Materials Science Duke University Date: Approved: Silvia Ferrari, Supervisor
Autonomous Sensor Path Planning and Control for Active Information Gathering by Wenjie Lu Department of Mechanical Engineering and Materials Science Duke University Date: Approved: Silvia Ferrari, Supervisor
Explorability of Noisy Scalar Fields
 011 50th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC) Orlando, FL, USA, December 1-15, 011 Explorability of Noisy Scalar Fields Wencen Wu and Fumin Zhang Abstract We
011 50th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC) Orlando, FL, USA, December 1-15, 011 Explorability of Noisy Scalar Fields Wencen Wu and Fumin Zhang Abstract We
Improved Particle Filtering Based on Biogeography-based Optimization for UGV Navigation
 Improved Particle Filtering Based on Biogeography-based Optimization for UGV Navigation A. Kuifeng Su 1,2, B. Zhidong Deng 1, and C. Zhen Huang 1 1 Department of Computer Science, State Key Laboratory
Improved Particle Filtering Based on Biogeography-based Optimization for UGV Navigation A. Kuifeng Su 1,2, B. Zhidong Deng 1, and C. Zhen Huang 1 1 Department of Computer Science, State Key Laboratory
OPTIMAL ESTIMATION of DYNAMIC SYSTEMS
 CHAPMAN & HALL/CRC APPLIED MATHEMATICS -. AND NONLINEAR SCIENCE SERIES OPTIMAL ESTIMATION of DYNAMIC SYSTEMS John L Crassidis and John L. Junkins CHAPMAN & HALL/CRC A CRC Press Company Boca Raton London
CHAPMAN & HALL/CRC APPLIED MATHEMATICS -. AND NONLINEAR SCIENCE SERIES OPTIMAL ESTIMATION of DYNAMIC SYSTEMS John L Crassidis and John L. Junkins CHAPMAN & HALL/CRC A CRC Press Company Boca Raton London
Adaptive Multi-Modal Sensing of General Concealed Targets
 Adaptive Multi-Modal Sensing of General Concealed argets Lawrence Carin Balaji Krishnapuram, David Williams, Xuejun Liao and Ya Xue Department of Electrical & Computer Engineering Duke University Durham,
Adaptive Multi-Modal Sensing of General Concealed argets Lawrence Carin Balaji Krishnapuram, David Williams, Xuejun Liao and Ya Xue Department of Electrical & Computer Engineering Duke University Durham,
Geometric Formation Control for Autonomous Underwater Vehicles
 010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 010, Anchorage, Alaska, USA Geometric Formation Control for Autonomous Underwater Vehicles Huizhen Yang
010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 010, Anchorage, Alaska, USA Geometric Formation Control for Autonomous Underwater Vehicles Huizhen Yang
Attitude Control Method of Spin-Stabilized Satellite Base on Equiangular Precession
 International Conference on Artificial Intelligence and Engineering Applications (AIEA 2016) Attitude Control Method of Spin-Stabilized Satellite Base on Equiangular Precession Yonggang Li a, Jiping Ren
International Conference on Artificial Intelligence and Engineering Applications (AIEA 2016) Attitude Control Method of Spin-Stabilized Satellite Base on Equiangular Precession Yonggang Li a, Jiping Ren
Minimalist robots and motion coordination Deployment and Territory Partitioning for Gossiping Robots
 Minimalist robots and motion coordination Deployment and Territory Partitioning for Gossiping Robots What kind of systems? Groups of systems with control, sensing, communication and computing Francesco
Minimalist robots and motion coordination Deployment and Territory Partitioning for Gossiping Robots What kind of systems? Groups of systems with control, sensing, communication and computing Francesco
COMBINED ADAPTIVE CONTROLLER FOR UAV GUIDANCE
 COMBINED ADAPTIVE CONTROLLER FOR UAV GUIDANCE B.R. Andrievsky, A.L. Fradkov Institute for Problems of Mechanical Engineering of Russian Academy of Sciences 61, Bolshoy av., V.O., 199178 Saint Petersburg,
COMBINED ADAPTIVE CONTROLLER FOR UAV GUIDANCE B.R. Andrievsky, A.L. Fradkov Institute for Problems of Mechanical Engineering of Russian Academy of Sciences 61, Bolshoy av., V.O., 199178 Saint Petersburg,
FORECASTING OF ECONOMIC QUANTITIES USING FUZZY AUTOREGRESSIVE MODEL AND FUZZY NEURAL NETWORK
 FORECASTING OF ECONOMIC QUANTITIES USING FUZZY AUTOREGRESSIVE MODEL AND FUZZY NEURAL NETWORK Dusan Marcek Silesian University, Institute of Computer Science Opava Research Institute of the IT4Innovations
FORECASTING OF ECONOMIC QUANTITIES USING FUZZY AUTOREGRESSIVE MODEL AND FUZZY NEURAL NETWORK Dusan Marcek Silesian University, Institute of Computer Science Opava Research Institute of the IT4Innovations
CLF-based Tracking Control for UAV Kinematic Models with Saturation Constraints
 CDC3-IEEE45 CLF-based Tracking Control for UAV Kinematic Models with Saturation Constraints Wei Ren Randal W. Beard Department of Electrical and Computer Engineering Brigham Young University Provo, Utah
CDC3-IEEE45 CLF-based Tracking Control for UAV Kinematic Models with Saturation Constraints Wei Ren Randal W. Beard Department of Electrical and Computer Engineering Brigham Young University Provo, Utah
Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL VOL. 56 NO. 3 MARCH 2011 655 Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays Nikolaos Bekiaris-Liberis Miroslav Krstic In this case system
IEEE TRANSACTIONS ON AUTOMATIC CONTROL VOL. 56 NO. 3 MARCH 2011 655 Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays Nikolaos Bekiaris-Liberis Miroslav Krstic In this case system
EVALUATING SYMMETRIC INFORMATION GAP BETWEEN DYNAMICAL SYSTEMS USING PARTICLE FILTER
 EVALUATING SYMMETRIC INFORMATION GAP BETWEEN DYNAMICAL SYSTEMS USING PARTICLE FILTER Zhen Zhen 1, Jun Young Lee 2, and Abdus Saboor 3 1 Mingde College, Guizhou University, China zhenz2000@21cn.com 2 Department
EVALUATING SYMMETRIC INFORMATION GAP BETWEEN DYNAMICAL SYSTEMS USING PARTICLE FILTER Zhen Zhen 1, Jun Young Lee 2, and Abdus Saboor 3 1 Mingde College, Guizhou University, China zhenz2000@21cn.com 2 Department
Reach Sets and the Hamilton-Jacobi Equation
 Reach Sets and the Hamilton-Jacobi Equation Ian Mitchell Department of Computer Science The University of British Columbia Joint work with Alex Bayen, Meeko Oishi & Claire Tomlin (Stanford) research supported
Reach Sets and the Hamilton-Jacobi Equation Ian Mitchell Department of Computer Science The University of British Columbia Joint work with Alex Bayen, Meeko Oishi & Claire Tomlin (Stanford) research supported
Complexity Metrics. ICRAT Tutorial on Airborne self separation in air transportation Budapest, Hungary June 1, 2010.
 Complexity Metrics ICRAT Tutorial on Airborne self separation in air transportation Budapest, Hungary June 1, 2010 Outline Introduction and motivation The notion of air traffic complexity Relevant characteristics
Complexity Metrics ICRAT Tutorial on Airborne self separation in air transportation Budapest, Hungary June 1, 2010 Outline Introduction and motivation The notion of air traffic complexity Relevant characteristics
Clustering non-stationary data streams and its applications
 Clustering non-stationary data streams and its applications Amr Abdullatif DIBRIS, University of Genoa, Italy amr.abdullatif@unige.it June 22th, 2016 Outline Introduction 1 Introduction 2 3 4 INTRODUCTION
Clustering non-stationary data streams and its applications Amr Abdullatif DIBRIS, University of Genoa, Italy amr.abdullatif@unige.it June 22th, 2016 Outline Introduction 1 Introduction 2 3 4 INTRODUCTION
Memoryless Control Design for Persistent Surveillance under Safety Constraints
 Memoryless Control Design for Persistent Surveillance under Safety Constraints Eduardo Arvelo, Eric Kim and Nuno C. Martins Department of Electrical and Computer Engineering and Maryland Robotics Center
Memoryless Control Design for Persistent Surveillance under Safety Constraints Eduardo Arvelo, Eric Kim and Nuno C. Martins Department of Electrical and Computer Engineering and Maryland Robotics Center
Consensus Algorithms are Input-to-State Stable
 05 American Control Conference June 8-10, 05. Portland, OR, USA WeC16.3 Consensus Algorithms are Input-to-State Stable Derek B. Kingston Wei Ren Randal W. Beard Department of Electrical and Computer Engineering
05 American Control Conference June 8-10, 05. Portland, OR, USA WeC16.3 Consensus Algorithms are Input-to-State Stable Derek B. Kingston Wei Ren Randal W. Beard Department of Electrical and Computer Engineering
Cooperative Control Synthesis for Moving-Target-Enclosing with Changing Topologies
 2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA Cooperative Control Synthesis for Moving-Target-Enclosing with Changing
2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA Cooperative Control Synthesis for Moving-Target-Enclosing with Changing
Gradient Sampling for Improved Action Selection and Path Synthesis
 Gradient Sampling for Improved Action Selection and Path Synthesis Ian M. Mitchell Department of Computer Science The University of British Columbia November 2016 mitchell@cs.ubc.ca http://www.cs.ubc.ca/~mitchell
Gradient Sampling for Improved Action Selection and Path Synthesis Ian M. Mitchell Department of Computer Science The University of British Columbia November 2016 mitchell@cs.ubc.ca http://www.cs.ubc.ca/~mitchell
The Perceptron Algorithm
 The Perceptron Algorithm Greg Grudic Greg Grudic Machine Learning Questions? Greg Grudic Machine Learning 2 Binary Classification A binary classifier is a mapping from a set of d inputs to a single output
The Perceptron Algorithm Greg Grudic Greg Grudic Machine Learning Questions? Greg Grudic Machine Learning 2 Binary Classification A binary classifier is a mapping from a set of d inputs to a single output
New Advances in Uncertainty Analysis and Estimation
 New Advances in Uncertainty Analysis and Estimation Overview: Both sensor observation data and mathematical models are used to assist in the understanding of physical dynamic systems. However, observational
New Advances in Uncertainty Analysis and Estimation Overview: Both sensor observation data and mathematical models are used to assist in the understanding of physical dynamic systems. However, observational
NONLINEAR PLANT IDENTIFICATION BY WAVELETS
 NONLINEAR PLANT IDENTIFICATION BY WAVELETS Edison Righeto UNESP Ilha Solteira, Department of Mathematics, Av. Brasil 56, 5385000, Ilha Solteira, SP, Brazil righeto@fqm.feis.unesp.br Luiz Henrique M. Grassi
NONLINEAR PLANT IDENTIFICATION BY WAVELETS Edison Righeto UNESP Ilha Solteira, Department of Mathematics, Av. Brasil 56, 5385000, Ilha Solteira, SP, Brazil righeto@fqm.feis.unesp.br Luiz Henrique M. Grassi
Function Approximation for Continuous Constrained MDPs
 Function Approximation for Continuous Constrained MDPs Aditya Undurti, Alborz Geramifard, Jonathan P. How Abstract In this work we apply function approximation techniques to solve continuous, constrained
Function Approximation for Continuous Constrained MDPs Aditya Undurti, Alborz Geramifard, Jonathan P. How Abstract In this work we apply function approximation techniques to solve continuous, constrained
Partially Observable Markov Decision Processes (POMDPs)
") Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Automated Tuning of the Nonlinear Complementary Filter for an Attitude Heading Reference Observer
 Automated Tuning of the Nonlinear Complementary Filter for an Attitude Heading Reference Observer Oscar De Silva, George K.I. Mann and Raymond G. Gosine Faculty of Engineering and Applied Sciences, Memorial
Automated Tuning of the Nonlinear Complementary Filter for an Attitude Heading Reference Observer Oscar De Silva, George K.I. Mann and Raymond G. Gosine Faculty of Engineering and Applied Sciences, Memorial
Trajectory tracking & Path-following control
 Cooperative Control of Multiple Robotic Vehicles: Theory and Practice Trajectory tracking & Path-following control EECI Graduate School on Control Supélec, Feb. 21-25, 2011 A word about T Tracking and
Cooperative Control of Multiple Robotic Vehicles: Theory and Practice Trajectory tracking & Path-following control EECI Graduate School on Control Supélec, Feb. 21-25, 2011 A word about T Tracking and
F.L. Lewis, NAI. Talk available online at Supported by : NSF AFOSR Europe ONR Marc Steinberg US TARDEC
 F.L. Lewis, NAI Moncrief-O Donnell Chair, UTA Research Institute (UTARI) The University of Texas at Arlington, USA and Qian Ren Consulting Professor, State Key Laboratory of Synthetical Automation for
F.L. Lewis, NAI Moncrief-O Donnell Chair, UTA Research Institute (UTARI) The University of Texas at Arlington, USA and Qian Ren Consulting Professor, State Key Laboratory of Synthetical Automation for
Adaptive Predictive Observer Design for Class of Uncertain Nonlinear Systems with Bounded Disturbance
 International Journal of Control Science and Engineering 2018, 8(2): 31-35 DOI: 10.5923/j.control.20180802.01 Adaptive Predictive Observer Design for Class of Saeed Kashefi *, Majid Hajatipor Faculty of
International Journal of Control Science and Engineering 2018, 8(2): 31-35 DOI: 10.5923/j.control.20180802.01 Adaptive Predictive Observer Design for Class of Saeed Kashefi *, Majid Hajatipor Faculty of
AASS, Örebro University
 Mobile Robotics Achim J. and Lilienthal Olfaction Lab, AASS, Örebro University 1 Contents 1. Gas-Sensitive Mobile Robots in the Real World 2. Gas Dispersal in Natural Environments 3. Gas Quantification
Mobile Robotics Achim J. and Lilienthal Olfaction Lab, AASS, Örebro University 1 Contents 1. Gas-Sensitive Mobile Robots in the Real World 2. Gas Dispersal in Natural Environments 3. Gas Quantification
Systematic Error Modeling and Bias Estimation
 sensors Article Systematic Error Modeling and Bias Estimation Feihu Zhang * and Alois Knoll Robotics and Embedded Systems, Technische Universität München, 8333 München, Germany; knoll@in.tum.de * Correspondence:
sensors Article Systematic Error Modeling and Bias Estimation Feihu Zhang * and Alois Knoll Robotics and Embedded Systems, Technische Universität München, 8333 München, Germany; knoll@in.tum.de * Correspondence:
CS 540: Machine Learning Lecture 1: Introduction
 CS 540: Machine Learning Lecture 1: Introduction AD January 2008 AD () January 2008 1 / 41 Acknowledgments Thanks to Nando de Freitas Kevin Murphy AD () January 2008 2 / 41 Administrivia & Announcement
CS 540: Machine Learning Lecture 1: Introduction AD January 2008 AD () January 2008 1 / 41 Acknowledgments Thanks to Nando de Freitas Kevin Murphy AD () January 2008 2 / 41 Administrivia & Announcement
Pattern Recognition and Machine Learning
 Christopher M. Bishop Pattern Recognition and Machine Learning ÖSpri inger Contents Preface Mathematical notation Contents vii xi xiii 1 Introduction 1 1.1 Example: Polynomial Curve Fitting 4 1.2 Probability
Christopher M. Bishop Pattern Recognition and Machine Learning ÖSpri inger Contents Preface Mathematical notation Contents vii xi xiii 1 Introduction 1 1.1 Example: Polynomial Curve Fitting 4 1.2 Probability
A Probabilistic Relational Model for Characterizing Situations in Dynamic Multi-Agent Systems
 A Probabilistic Relational Model for Characterizing Situations in Dynamic Multi-Agent Systems Daniel Meyer-Delius 1, Christian Plagemann 1, Georg von Wichert 2, Wendelin Feiten 2, Gisbert Lawitzky 2, and
A Probabilistic Relational Model for Characterizing Situations in Dynamic Multi-Agent Systems Daniel Meyer-Delius 1, Christian Plagemann 1, Georg von Wichert 2, Wendelin Feiten 2, Gisbert Lawitzky 2, and
Verified High-Order Optimal Control in Space Flight Dynamics
 Verified High-Order Optimal Control in Space Flight Dynamics R. Armellin, P. Di Lizia, F. Bernelli-Zazzera K. Makino and M. Berz Fourth International Workshop on Taylor Methods Boca Raton, December 16
Verified High-Order Optimal Control in Space Flight Dynamics R. Armellin, P. Di Lizia, F. Bernelli-Zazzera K. Makino and M. Berz Fourth International Workshop on Taylor Methods Boca Raton, December 16