Chapter 8: Frequency Domain Analysis
|
|
|
- Juniper Chambers
- 5 years ago
- Views:
Transcription
1 Chapter 8: Frequency Domain Analysis Samantha Ramirez Preview Questions 1. What is the steady-state response of a linear system excited by a cyclic or oscillatory input? 2. How does one characterize the response at steady-state when the system is exposed to a consistent oscillatory input? 3. Is the time domain still appropriate for conducting our analyses of such systems? 4. What tools are useful for examining such dynamics? 1




2 Objectives and Outcomes Objectives 1. To analyze mechanical vibration systems including transmission and modal analysis, 2. To be able to analyze basic AC circuits, and 3. To conduct frequency response analysis. Outcomes: You will be able to 1. determine the steady-state response of a linear time-invariant system to a sinusoidal input, 2. calculate the force or motion transmitted by a vibration isolation system, 3. conduct basic modal analysis of free vibration systems, 4. conduct basic analyses of AC circuits, 5. identify the characteristics for frequency responses of first- and second-order systems, and 6. compose Bode plots that visualize the frequency response of an oscillatory system Complex Numbers z = x + jy z ҧ = x jy z = x 2 + y 2 θ = tan 1 y x 2

 z w = x u + j(y v) az = ax + jay jz = y + jx = z (0 +")
3 5.2.2 Euler s Theorem Refer to the textbook ( for derivation of theorem and identities) Euler s Theorem Cosine Identity Sine Identity e jθ = cos θ j sin θ cos θ = ejθ + e jθ 2 sin θ = ejθ e jθ 2j Complex Algebra z = x + jy and w = u + jv z + w = x + u + j(y + v) z w = x u + j(y v) az = ax + jay jz = y + jx = z ( ) z = y jx = z (θ 90 ) j zw = xu yv + j(xv + yu) zw = z w (θ + φ) z n = z θ n = z n (nθ) z w = z w xu + yv yu xv θ φ = u 2 + j + y2 u 2 + y 2 z 1/n = z θ 1/n = z 1/n (θ/n) 3



 8.")

4 Complex Variables and Functions Transfer function Ratio of polynomials in the s-domain Zeroes Roots of the numerator Poles Roots of the denominator s = σ + jω G s = K s + z 1 s + z 2 (s + z m ) s + p 1 s + p 2 (s + p n ) 8.2 Properties of Sinusoids Sinusoids of different amplitude Period of oscillation Sinusoids of different phase angle 4

 2j = Ysin(ωt + φ) = G jω Asin(ωt + φ) Magnitude and Phase Angle G jω y ss t = G jω Asin(ωt + φ) = Y sin(ωt + φ) Y = G jω A and φ = G(jω) = y(jω) u(jω) = output to input amplitude ratio G jω =")
5 The Sinusoidal Transfer Function y(s) u(s) = G s = K s + z 1 s + z 2 (s + z m ) s + p 1 s + p 2 (s + p n ) Partial fraction of sinusoidal response y s = G s Aω = a + s 2 +ω 2 s+jω തa s jω + b 1 s+p 1 + b 2 s+p b n s+p n y ss t = ae jωt + തae jωt If the response is stable, these terms lead to decaying exponentials and decaying sinusoids. a = A 2j G( jω) തa = A 2j G(jω) See textbook for derivation of these coefficients y ss t = ae jωt + തae jωt = A 2j G jω e jφ e jωt + A 2j G jω ejφ e jωt We use Euler s Theorem = G jω A ej(ωt+φ) e j(ωt+φ) 2j = Ysin(ωt + φ) = G jω Asin(ωt + φ) Magnitude and Phase Angle G jω y ss t = G jω Asin(ωt + φ) = Y sin(ωt + φ) Y = G jω A and φ = G(jω) = y(jω) u(jω) = output to input amplitude ratio G jω = y(jω) u(jω) = tan 1 I G(jω) R G(jω) I y(jω) = tan 1 R y(jω) tan 1 I u(jω) R u(jω) = phase shift of output with respect to input 5
6 Example 8.1 Find the steady-state response to a sinusoidal input displacement of the form y road = A sin ωt m/s where A=0.03 m and ω=10 rad/s. The system parameters for m, b, and k are 500 kg, 8000 N-s/m, and 34,000 N/m, respectively. The transfer function is given below. y(s) bs + k = G s = y road (s) ms 2 + bs + k Complex Operations in MATLAB Function abs(x) angle(x) conj(x) imag(x) real(x) Description Returns magnitude(s) of complex element(s) in X Returns phase angle(s) of complex element(s) in X Returns complex conjugate(s) of complex element(s) in X Returns imaginary part(s) of complex element(s) in X Returns real part(s) of complex element(s) in X 6
7 Example 8.2 >> m=500; b=8000; k=34000; w=10; A=0.03; >> G=(k+j*b*w)/((k-m*w^2)+j*b*w) G = i >> abs(g) ans = >> angle(g) ans = >> num=k+j*b*w; >> den=(k-m*w^2)+j*b*w den = e e+04i >> G=(num*conj(den))/(den*conj(den)) G = i >> magnitude=abs(num)/abs(den) magnitude = >> phase=angle(num)-angle(den) phase = >> magnitude=sqrt(real(g)^2+imag(g)^2) magnitude = >> phase=atan(imag(g)/real(g)) phase = Mechanical Vibration 7
 to the")


8 Transmissibility In vibration isolation systems, transmissibility is the amplitude ratio of the transmitted force (displacement) to the excitation force (displacement). TR = F out(jω) F in (jω) Example 8.3 Find the transmissibility if the foundation is forced by an excitation F in t = 5sin2t N. The first mass, damping constant, spring stiffness, and second mass are 2 kg, 2 N-s/m, 5 N/m, and 1 kg, respectively. 8
9 Motion Transmissibility Example 8.1 Input y road = 0.03 sin 10t m/s Output Response y ss t = sin 10t m/s Amplitude ratio of output to input G(jω) = Motion Transmissibility TR = = y(jω) y road (jω) = y(s) bs + k = G s = y road (s) ms 2 + bs + k G jω = y(jω) y road (jω) = k + bjω m jω 2 + bjω + k Resonant Frequency Occurs when a system s natural frequency is equal to the input frequency. Recall, from the prototypical second-order system: ω n = k m ζ = b 2 km Normalized frequency is the input sinusoidal frequency divided by the natural frequency Resonant frequency for a prototypical second-order system ω ω n ω r = ω n 1 2ζ 2 9
10 The Quarter-Car Suspension Rewrite the motion transmissibility in terms of the damping ratio and normalized frequency. TR = k 2 + bω 2 k mω bω 2 Resonance for the Quarter-Car Suspension ζ = b 2 km = 0.97 ω n = k = 8.25 rad/s m 10


11 Modal Analysis of Free Vibration Set & Tensor Notation Vector Vector in set form Matrix referenced as tensor Set of second-order, free, undamped vibration equations 11


12 Converting System of First-Order D.E. to System of Second-Order D.E. Recognizing that and we can reformulate the system of first-order differential equations as Matrix Form of the Vibration Equations 12





13 Frequencies and Modes of Vibration In free vibration we assume Plug into M x ሷ + K x = 0 The eigenvalues are the squares of the frequencies of vibration and the eigenvectors are the mode shapes. Example 8.4 Find the natural frequencies of vibration and the respective mode shapes for the two DOF structure model and an axially vibrating beam where k 1 = 2k 2 and m 1 = 2m 2. For simplicity, k 2 = k and m 2 = m. 13


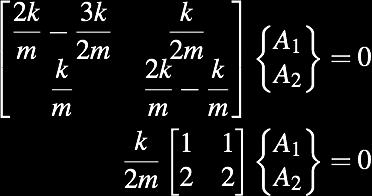
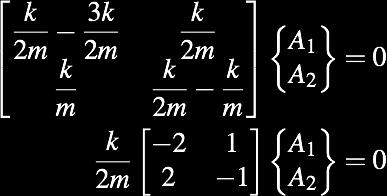
14 Example 8.4 det ω 2 I M 1 K = 0 Eigenvalues Eigenvector 1 Eigenvector 2 14
CHAPTER 5: LAPLACE TRANSFORMS
 CHAPTER 5: LAPLACE TRANSFORMS SAMANTHA RAMIREZ PREVIEW QUESTIONS What are some commonly recurring functions in dynamic systems and their Laplace transforms? How can Laplace transforms be used to solve
CHAPTER 5: LAPLACE TRANSFORMS SAMANTHA RAMIREZ PREVIEW QUESTIONS What are some commonly recurring functions in dynamic systems and their Laplace transforms? How can Laplace transforms be used to solve
Chapter 7: Time Domain Analysis
 Chapter 7: Time Domain Analysis Samantha Ramirez Preview Questions How do the system parameters affect the response? How are the parameters linked to the system poles or eigenvalues? How can Laplace transforms
Chapter 7: Time Domain Analysis Samantha Ramirez Preview Questions How do the system parameters affect the response? How are the parameters linked to the system poles or eigenvalues? How can Laplace transforms
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering Dynamics and Control II Fall 2007
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering.4 Dynamics and Control II Fall 7 Problem Set #9 Solution Posted: Sunday, Dec., 7. The.4 Tower system. The system parameters are
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering.4 Dynamics and Control II Fall 7 Problem Set #9 Solution Posted: Sunday, Dec., 7. The.4 Tower system. The system parameters are
Frequency Response of Linear Time Invariant Systems
 ME 328, Spring 203, Prof. Rajamani, University of Minnesota Frequency Response of Linear Time Invariant Systems Complex Numbers: Recall that every complex number has a magnitude and a phase. Example: z
ME 328, Spring 203, Prof. Rajamani, University of Minnesota Frequency Response of Linear Time Invariant Systems Complex Numbers: Recall that every complex number has a magnitude and a phase. Example: z
Introduction to Vibration. Mike Brennan UNESP, Ilha Solteira São Paulo Brazil
 Introduction to Vibration Mike Brennan UNESP, Ilha Solteira São Paulo Brazil Vibration Most vibrations are undesirable, but there are many instances where vibrations are useful Ultrasonic (very high
Introduction to Vibration Mike Brennan UNESP, Ilha Solteira São Paulo Brazil Vibration Most vibrations are undesirable, but there are many instances where vibrations are useful Ultrasonic (very high
Chapter 10: Sinusoidal Steady-State Analysis
 Chapter 10: Sinusoidal Steady-State Analysis 1 Objectives : sinusoidal functions Impedance use phasors to determine the forced response of a circuit subjected to sinusoidal excitation Apply techniques
Chapter 10: Sinusoidal Steady-State Analysis 1 Objectives : sinusoidal functions Impedance use phasors to determine the forced response of a circuit subjected to sinusoidal excitation Apply techniques
Chapter 5 Design. D. J. Inman 1/51 Mechanical Engineering at Virginia Tech
 Chapter 5 Design Acceptable vibration levels (ISO) Vibration isolation Vibration absorbers Effects of damping in absorbers Optimization Viscoelastic damping treatments Critical Speeds Design for vibration
Chapter 5 Design Acceptable vibration levels (ISO) Vibration isolation Vibration absorbers Effects of damping in absorbers Optimization Viscoelastic damping treatments Critical Speeds Design for vibration
Math Assignment 5
 Math 2280 - Assignment 5 Dylan Zwick Fall 2013 Section 3.4-1, 5, 18, 21 Section 3.5-1, 11, 23, 28, 35, 47, 56 Section 3.6-1, 2, 9, 17, 24 1 Section 3.4 - Mechanical Vibrations 3.4.1 - Determine the period
Math 2280 - Assignment 5 Dylan Zwick Fall 2013 Section 3.4-1, 5, 18, 21 Section 3.5-1, 11, 23, 28, 35, 47, 56 Section 3.6-1, 2, 9, 17, 24 1 Section 3.4 - Mechanical Vibrations 3.4.1 - Determine the period
Introduction to Vibration. Professor Mike Brennan
 Introduction to Vibration Professor Mie Brennan Introduction to Vibration Nature of vibration of mechanical systems Free and forced vibrations Frequency response functions Fundamentals For free vibration
Introduction to Vibration Professor Mie Brennan Introduction to Vibration Nature of vibration of mechanical systems Free and forced vibrations Frequency response functions Fundamentals For free vibration
Laboratory handout 5 Mode shapes and resonance
 laboratory handouts, me 34 82 Laboratory handout 5 Mode shapes and resonance In this handout, material and assignments marked as optional can be skipped when preparing for the lab, but may provide a useful
laboratory handouts, me 34 82 Laboratory handout 5 Mode shapes and resonance In this handout, material and assignments marked as optional can be skipped when preparing for the lab, but may provide a useful
The Phasor Analysis Method For Harmonically Forced Linear Systems
 The Phasor Analysis Method For Harmonically Forced Linear Systems Daniel S. Stutts, Ph.D. April 4, 1999 Revised: 10-15-010, 9-1-011 1 Introduction One of the most common tasks in vibration analysis is
The Phasor Analysis Method For Harmonically Forced Linear Systems Daniel S. Stutts, Ph.D. April 4, 1999 Revised: 10-15-010, 9-1-011 1 Introduction One of the most common tasks in vibration analysis is
CMPT 318: Lecture 5 Complex Exponentials, Spectrum Representation
 CMPT 318: Lecture 5 Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University January 23, 2006 1 Exponentials The exponential is
CMPT 318: Lecture 5 Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University January 23, 2006 1 Exponentials The exponential is
ME scope Application Note 28
 App Note 8 www.vibetech.com 3/7/17 ME scope Application Note 8 Mathematics of a Mass-Spring-Damper System INTRODUCTION In this note, the capabilities of ME scope will be used to build a model of the mass-spring-damper
App Note 8 www.vibetech.com 3/7/17 ME scope Application Note 8 Mathematics of a Mass-Spring-Damper System INTRODUCTION In this note, the capabilities of ME scope will be used to build a model of the mass-spring-damper
Dynamic circuits: Frequency domain analysis
 Electronic Circuits 1 Dynamic circuits: Contents Free oscillation and natural frequency Transfer functions Frequency response Bode plots 1 System behaviour: overview 2 System behaviour : review solution
Electronic Circuits 1 Dynamic circuits: Contents Free oscillation and natural frequency Transfer functions Frequency response Bode plots 1 System behaviour: overview 2 System behaviour : review solution
Review of 1 st Order Circuit Analysis
 ECEN 60 Circuits/Electronics Spring 007-7-07 P. Mathys Review of st Order Circuit Analysis First Order Differential Equation Consider the following circuit with input voltage v S (t) and output voltage
ECEN 60 Circuits/Electronics Spring 007-7-07 P. Mathys Review of st Order Circuit Analysis First Order Differential Equation Consider the following circuit with input voltage v S (t) and output voltage
ROOT LOCUS. Consider the system. Root locus presents the poles of the closed-loop system when the gain K changes from 0 to. H(s) H ( s) = ( s)
 H ( s) = ( s)") C1 ROOT LOCUS Consider the system R(s) E(s) C(s) + K G(s) - H(s) C(s) R(s) = K G(s) 1 + K G(s) H(s) Root locus presents the poles of the closed-loop system when the gain K changes from 0 to 1+ K G ( s)
C1 ROOT LOCUS Consider the system R(s) E(s) C(s) + K G(s) - H(s) C(s) R(s) = K G(s) 1 + K G(s) H(s) Root locus presents the poles of the closed-loop system when the gain K changes from 0 to 1+ K G ( s)
Oscillations. Simple Harmonic Motion of a Mass on a Spring The equation of motion for a mass m is attached to a spring of constant k is
 Dr. Alain Brizard College Physics I (PY 10) Oscillations Textbook Reference: Chapter 14 sections 1-8. Simple Harmonic Motion of a Mass on a Spring The equation of motion for a mass m is attached to a spring
Dr. Alain Brizard College Physics I (PY 10) Oscillations Textbook Reference: Chapter 14 sections 1-8. Simple Harmonic Motion of a Mass on a Spring The equation of motion for a mass m is attached to a spring
Sinusoids. Amplitude and Magnitude. Phase and Period. CMPT 889: Lecture 2 Sinusoids, Complex Exponentials, Spectrum Representation
 Sinusoids CMPT 889: Lecture Sinusoids, Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University September 6, 005 Sinusoids are
Sinusoids CMPT 889: Lecture Sinusoids, Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University September 6, 005 Sinusoids are
CMPT 889: Lecture 2 Sinusoids, Complex Exponentials, Spectrum Representation
 CMPT 889: Lecture 2 Sinusoids, Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University September 26, 2005 1 Sinusoids Sinusoids
CMPT 889: Lecture 2 Sinusoids, Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University September 26, 2005 1 Sinusoids Sinusoids
Circuits and Systems I
 Circuits and Systems I LECTURE #2 Phasor Addition lions@epfl Prof. Dr. Volkan Cevher LIONS/Laboratory for Information and Inference Systems License Info for SPFirst Slides This work released under a Creative
Circuits and Systems I LECTURE #2 Phasor Addition lions@epfl Prof. Dr. Volkan Cevher LIONS/Laboratory for Information and Inference Systems License Info for SPFirst Slides This work released under a Creative
Electric Circuit Theory
 Electric Circuit Theory Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Chapter 11 Sinusoidal Steady-State Analysis Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Contents and Objectives 3 Chapter Contents 11.1
Electric Circuit Theory Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Chapter 11 Sinusoidal Steady-State Analysis Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Contents and Objectives 3 Chapter Contents 11.1
3 What You Should Know About Complex Numbers
 3 What You Should Know About Complex Numbers Life is complex it has a real part, and an imaginary part Andrew Koenig. Complex numbers are an extension of the more familiar world of real numbers that make
3 What You Should Know About Complex Numbers Life is complex it has a real part, and an imaginary part Andrew Koenig. Complex numbers are an extension of the more familiar world of real numbers that make
Dynamic Response. Assoc. Prof. Enver Tatlicioglu. Department of Electrical & Electronics Engineering Izmir Institute of Technology.
 Dynamic Response Assoc. Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 3 Assoc. Prof. Enver Tatlicioglu (EEE@IYTE) EE362 Feedback Control
Dynamic Response Assoc. Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 3 Assoc. Prof. Enver Tatlicioglu (EEE@IYTE) EE362 Feedback Control
Radar Dish. Armature controlled dc motor. Inside. θ r input. Outside. θ D output. θ m. Gearbox. Control Transmitter. Control. θ D.
 Radar Dish ME 304 CONTROL SYSTEMS Mechanical Engineering Department, Middle East Technical University Armature controlled dc motor Outside θ D output Inside θ r input r θ m Gearbox Control Transmitter
Radar Dish ME 304 CONTROL SYSTEMS Mechanical Engineering Department, Middle East Technical University Armature controlled dc motor Outside θ D output Inside θ r input r θ m Gearbox Control Transmitter
Explanations and Discussion of Some Laplace Methods: Transfer Functions and Frequency Response. Y(s) = b 1
 = b 1") Engs 22 p. 1 Explanations Discussion of Some Laplace Methods: Transfer Functions Frequency Response I. Anatomy of Differential Equations in the S-Domain Parts of the s-domain solution. We will consider
Engs 22 p. 1 Explanations Discussion of Some Laplace Methods: Transfer Functions Frequency Response I. Anatomy of Differential Equations in the S-Domain Parts of the s-domain solution. We will consider
Notes on the Periodically Forced Harmonic Oscillator
 Notes on the Periodically orced Harmonic Oscillator Warren Weckesser Math 38 - Differential Equations 1 The Periodically orced Harmonic Oscillator. By periodically forced harmonic oscillator, we mean the
Notes on the Periodically orced Harmonic Oscillator Warren Weckesser Math 38 - Differential Equations 1 The Periodically orced Harmonic Oscillator. By periodically forced harmonic oscillator, we mean the
8.1.6 Quadratic pole response: resonance
 8.1.6 Quadratic pole response: resonance Example G(s)= v (s) v 1 (s) = 1 1+s L R + s LC L + Second-order denominator, of the form 1+a 1 s + a s v 1 (s) + C R Two-pole low-pass filter example v (s) with
8.1.6 Quadratic pole response: resonance Example G(s)= v (s) v 1 (s) = 1 1+s L R + s LC L + Second-order denominator, of the form 1+a 1 s + a s v 1 (s) + C R Two-pole low-pass filter example v (s) with
ME 563 HOMEWORK # 7 SOLUTIONS Fall 2010
 ME 563 HOMEWORK # 7 SOLUTIONS Fall 2010 PROBLEM 1: Given the mass matrix and two undamped natural frequencies for a general two degree-of-freedom system with a symmetric stiffness matrix, find the stiffness
ME 563 HOMEWORK # 7 SOLUTIONS Fall 2010 PROBLEM 1: Given the mass matrix and two undamped natural frequencies for a general two degree-of-freedom system with a symmetric stiffness matrix, find the stiffness
Sinusoids and Phasors
 CHAPTER 9 Sinusoids and Phasors We now begins the analysis of circuits in which the voltage or current sources are time-varying. In this chapter, we are particularly interested in sinusoidally time-varying
CHAPTER 9 Sinusoids and Phasors We now begins the analysis of circuits in which the voltage or current sources are time-varying. In this chapter, we are particularly interested in sinusoidally time-varying
Second Order Systems
 Second Order Systems independent energy storage elements => Resonance: inertance & capacitance trade energy, kinetic to potential Example: Automobile Suspension x z vertical motions suspension spring shock
Second Order Systems independent energy storage elements => Resonance: inertance & capacitance trade energy, kinetic to potential Example: Automobile Suspension x z vertical motions suspension spring shock
ME 563 HOMEWORK # 5 SOLUTIONS Fall 2010
 ME 563 HOMEWORK # 5 SOLUTIONS Fall 2010 PROBLEM 1: You are given the lumped parameter dynamic differential equations of motion for a two degree-offreedom model of an automobile suspension system for small
ME 563 HOMEWORK # 5 SOLUTIONS Fall 2010 PROBLEM 1: You are given the lumped parameter dynamic differential equations of motion for a two degree-offreedom model of an automobile suspension system for small
Sinusoidal steady-state analysis
 Sinusoidal steady-state analysis From our previous efforts with AC circuits, some patterns in the analysis started to appear. 1. In each case, the steady-state voltages or currents created in response
Sinusoidal steady-state analysis From our previous efforts with AC circuits, some patterns in the analysis started to appear. 1. In each case, the steady-state voltages or currents created in response
Vibrations Qualifying Exam Study Material
 Vibrations Qualifying Exam Study Material The candidate is expected to have a thorough understanding of engineering vibrations topics. These topics are listed below for clarification. Not all instructors
Vibrations Qualifying Exam Study Material The candidate is expected to have a thorough understanding of engineering vibrations topics. These topics are listed below for clarification. Not all instructors
Damped Oscillators (revisited)
") Damped Oscillators (revisited) We saw that damped oscillators can be modeled using a recursive filter with two coefficients and no feedforward components: Y(k) = - a(1)*y(k-1) - a(2)*y(k-2) We derived
Damped Oscillators (revisited) We saw that damped oscillators can be modeled using a recursive filter with two coefficients and no feedforward components: Y(k) = - a(1)*y(k-1) - a(2)*y(k-2) We derived
Date: 1 April (1) The only reference material you may use is one 8½x11 crib sheet and a calculator.
 The only reference material you may use is one 8½x11 crib sheet and a calculator.") PH1140: Oscillations and Waves Name: Solutions Conference: Date: 1 April 2005 EXAM #1: D2005 INSTRUCTIONS: (1) The only reference material you may use is one 8½x11 crib sheet and a calculator. (2) Show
PH1140: Oscillations and Waves Name: Solutions Conference: Date: 1 April 2005 EXAM #1: D2005 INSTRUCTIONS: (1) The only reference material you may use is one 8½x11 crib sheet and a calculator. (2) Show
Frequency Response. Re ve jφ e jωt ( ) where v is the amplitude and φ is the phase of the sinusoidal signal v(t). ve jφ
 where v is the amplitude and φ is the phase of the sinusoidal signal v(t). ve jφ") 27 Frequency Response Before starting, review phasor analysis, Bode plots... Key concept: small-signal models for amplifiers are linear and therefore, cosines and sines are solutions of the linear differential
27 Frequency Response Before starting, review phasor analysis, Bode plots... Key concept: small-signal models for amplifiers are linear and therefore, cosines and sines are solutions of the linear differential
Date: 31 March (1) The only reference material you may use is one 8½x11 crib sheet and a calculator.
 The only reference material you may use is one 8½x11 crib sheet and a calculator.") PH1140: Oscillations and Waves Name: SOLUTIONS AT END Conference: Date: 31 March 2005 EXAM #1: D2006 INSTRUCTIONS: (1) The only reference material you may use is one 8½x11 crib sheet and a calculator.
PH1140: Oscillations and Waves Name: SOLUTIONS AT END Conference: Date: 31 March 2005 EXAM #1: D2006 INSTRUCTIONS: (1) The only reference material you may use is one 8½x11 crib sheet and a calculator.
Vibrations and Waves MP205, Assignment 4 Solutions
 Vibrations and Waves MP205, Assignment Solutions 1. Verify that x = Ae αt cos ωt is a possible solution of the equation and find α and ω in terms of γ and ω 0. [20] dt 2 + γ dx dt + ω2 0x = 0, Given x
Vibrations and Waves MP205, Assignment Solutions 1. Verify that x = Ae αt cos ωt is a possible solution of the equation and find α and ω in terms of γ and ω 0. [20] dt 2 + γ dx dt + ω2 0x = 0, Given x
Plan of the Lecture. Goal: wrap up lead and lag control; start looking at frequency response as an alternative methodology for control systems design.
 Plan of the Lecture Review: design using Root Locus; dynamic compensation; PD and lead control Today s topic: PI and lag control; introduction to frequency-response design method Goal: wrap up lead and
Plan of the Lecture Review: design using Root Locus; dynamic compensation; PD and lead control Today s topic: PI and lag control; introduction to frequency-response design method Goal: wrap up lead and
Chapter 10: Sinusoids and Phasors
 Chapter 10: Sinusoids and Phasors 1. Motivation 2. Sinusoid Features 3. Phasors 4. Phasor Relationships for Circuit Elements 5. Impedance and Admittance 6. Kirchhoff s Laws in the Frequency Domain 7. Impedance
Chapter 10: Sinusoids and Phasors 1. Motivation 2. Sinusoid Features 3. Phasors 4. Phasor Relationships for Circuit Elements 5. Impedance and Admittance 6. Kirchhoff s Laws in the Frequency Domain 7. Impedance
Section 3.7: Mechanical and Electrical Vibrations
 Section 3.7: Mechanical and Electrical Vibrations Second order linear equations with constant coefficients serve as mathematical models for mechanical and electrical oscillations. For example, the motion
Section 3.7: Mechanical and Electrical Vibrations Second order linear equations with constant coefficients serve as mathematical models for mechanical and electrical oscillations. For example, the motion
Chapter 14 Oscillations
 Chapter 14 Oscillations Chapter Goal: To understand systems that oscillate with simple harmonic motion. Slide 14-2 Chapter 14 Preview Slide 14-3 Chapter 14 Preview Slide 14-4 Chapter 14 Preview Slide 14-5
Chapter 14 Oscillations Chapter Goal: To understand systems that oscillate with simple harmonic motion. Slide 14-2 Chapter 14 Preview Slide 14-3 Chapter 14 Preview Slide 14-4 Chapter 14 Preview Slide 14-5
Electric Circuit Theory
 Electric Circuit Theory Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Chapter 8 Natural and Step Responses of RLC Circuits Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 8.1 Introduction to the Natural Response
Electric Circuit Theory Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Chapter 8 Natural and Step Responses of RLC Circuits Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 8.1 Introduction to the Natural Response
Section 4.9; Section 5.6. June 30, Free Mechanical Vibrations/Couple Mass-Spring System
 Section 4.9; Section 5.6 Free Mechanical Vibrations/Couple Mass-Spring System June 30, 2009 Today s Session Today s Session A Summary of This Session: Today s Session A Summary of This Session: (1) Free
Section 4.9; Section 5.6 Free Mechanical Vibrations/Couple Mass-Spring System June 30, 2009 Today s Session Today s Session A Summary of This Session: Today s Session A Summary of This Session: (1) Free
Work sheet / Things to know. Chapter 3
 MATH 251 Work sheet / Things to know 1. Second order linear differential equation Standard form: Chapter 3 What makes it homogeneous? We will, for the most part, work with equations with constant coefficients
MATH 251 Work sheet / Things to know 1. Second order linear differential equation Standard form: Chapter 3 What makes it homogeneous? We will, for the most part, work with equations with constant coefficients
e jωt = cos(ωt) + jsin(ωt),
 + jsin(ωt),") This chapter introduces you to the most useful mechanical oscillator model, a mass-spring system with a single degree of freedom. Basic understanding of this system is the gateway to the understanding
This chapter introduces you to the most useful mechanical oscillator model, a mass-spring system with a single degree of freedom. Basic understanding of this system is the gateway to the understanding
Chapter a. Spring constant, k : The change in the force per unit length change of the spring. b. Coefficient of subgrade reaction, k:
 Principles of Soil Dynamics 3rd Edition Das SOLUTIONS MANUAL Full clear download (no formatting errors) at: https://testbankreal.com/download/principles-soil-dynamics-3rd-editiondas-solutions-manual/ Chapter
Principles of Soil Dynamics 3rd Edition Das SOLUTIONS MANUAL Full clear download (no formatting errors) at: https://testbankreal.com/download/principles-soil-dynamics-3rd-editiondas-solutions-manual/ Chapter
Chapter 3 Mathematical Methods
 Chapter 3 Mathematical Methods Slides to accompany lectures in Vibro-Acoustic Design in Mechanical Systems 0 by D. W. Herrin Department of Mechanical Engineering Lexington, KY 40506-0503 Tel: 859-8-0609
Chapter 3 Mathematical Methods Slides to accompany lectures in Vibro-Acoustic Design in Mechanical Systems 0 by D. W. Herrin Department of Mechanical Engineering Lexington, KY 40506-0503 Tel: 859-8-0609
Frequency domain analysis
 Automatic Control 2 Frequency domain analysis Prof. Alberto Bemporad University of Trento Academic year 2010-2011 Prof. Alberto Bemporad (University of Trento) Automatic Control 2 Academic year 2010-2011
Automatic Control 2 Frequency domain analysis Prof. Alberto Bemporad University of Trento Academic year 2010-2011 Prof. Alberto Bemporad (University of Trento) Automatic Control 2 Academic year 2010-2011
Class 13 Frequency domain analysis
 Class 13 Frequency domain analysis The frequency response is the output of the system in steady state when the input of the system is sinusoidal Methods of system analysis by the frequency response, as
Class 13 Frequency domain analysis The frequency response is the output of the system in steady state when the input of the system is sinusoidal Methods of system analysis by the frequency response, as
Raktim Bhattacharya. . AERO 422: Active Controls for Aerospace Vehicles. Frequency Response-Design Method
 .. AERO 422: Active Controls for Aerospace Vehicles Frequency Response- Method Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. ... Response to
.. AERO 422: Active Controls for Aerospace Vehicles Frequency Response- Method Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. ... Response to
Circuit Analysis-III. Circuit Analysis-II Lecture # 3 Friday 06 th April, 18
 Circuit Analysis-III Sinusoids Example #1 ü Find the amplitude, phase, period and frequency of the sinusoid: v (t ) =12cos(50t +10 ) Signal Conversion ü From sine to cosine and vice versa. ü sin (A ± B)
Circuit Analysis-III Sinusoids Example #1 ü Find the amplitude, phase, period and frequency of the sinusoid: v (t ) =12cos(50t +10 ) Signal Conversion ü From sine to cosine and vice versa. ü sin (A ± B)
2. Determine whether the following pair of functions are linearly dependent, or linearly independent:
 Topics to be covered on the exam include: Recognizing, and verifying solutions to homogeneous second-order linear differential equations, and their corresponding Initial Value Problems Recognizing and
Topics to be covered on the exam include: Recognizing, and verifying solutions to homogeneous second-order linear differential equations, and their corresponding Initial Value Problems Recognizing and
MEG6007: Advanced Dynamics -Principles and Computational Methods (Fall, 2017) Lecture DOF Modeling of Shock Absorbers. This lecture covers:
 Lecture DOF Modeling of Shock Absorbers. This lecture covers:") MEG6007: Advanced Dynamics -Principles and Computational Methods (Fall, 207) Lecture 4. 2-DOF Modeling of Shock Absorbers This lecture covers: Revisit 2-DOF Spring-Mass System Understand the den Hartog
MEG6007: Advanced Dynamics -Principles and Computational Methods (Fall, 207) Lecture 4. 2-DOF Modeling of Shock Absorbers This lecture covers: Revisit 2-DOF Spring-Mass System Understand the den Hartog
Control Systems, Lecture04
 Control Systems, Lecture04 İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 53 Transfer Functions The output response of a system is the sum of two responses: the forced response and the
Control Systems, Lecture04 İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 53 Transfer Functions The output response of a system is the sum of two responses: the forced response and the
Math 216 Second Midterm 28 March, 2013
 Math 26 Second Midterm 28 March, 23 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
Math 26 Second Midterm 28 March, 23 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
The Harmonic Oscillator
 The Harmonic Oscillator Math 4: Ordinary Differential Equations Chris Meyer May 3, 008 Introduction The harmonic oscillator is a common model used in physics because of the wide range of problems it can
The Harmonic Oscillator Math 4: Ordinary Differential Equations Chris Meyer May 3, 008 Introduction The harmonic oscillator is a common model used in physics because of the wide range of problems it can
PHYSICS. Chapter 15 Lecture FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E RANDALL D. KNIGHT Pearson Education, Inc.
 PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 15 Lecture RANDALL D. KNIGHT Chapter 15 Oscillations IN THIS CHAPTER, you will learn about systems that oscillate in simple harmonic
PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 15 Lecture RANDALL D. KNIGHT Chapter 15 Oscillations IN THIS CHAPTER, you will learn about systems that oscillate in simple harmonic
Chapter 2: Complex numbers
 Chapter 2: Complex numbers Complex numbers are commonplace in physics and engineering. In particular, complex numbers enable us to simplify equations and/or more easily find solutions to equations. We
Chapter 2: Complex numbers Complex numbers are commonplace in physics and engineering. In particular, complex numbers enable us to simplify equations and/or more easily find solutions to equations. We
Math 304 Answers to Selected Problems
 Math Answers to Selected Problems Section 6.. Find the general solution to each of the following systems. a y y + y y y + y e y y y y y + y f y y + y y y + 6y y y + y Answer: a This is a system of the
Math Answers to Selected Problems Section 6.. Find the general solution to each of the following systems. a y y + y y y + y e y y y y y + y f y y + y y y + 6y y y + y Answer: a This is a system of the
Dynamics of structures
 Dynamics of structures 2.Vibrations: single degree of freedom system Arnaud Deraemaeker (aderaema@ulb.ac.be) 1 One degree of freedom systems in real life 2 1 Reduction of a system to a one dof system Example
Dynamics of structures 2.Vibrations: single degree of freedom system Arnaud Deraemaeker (aderaema@ulb.ac.be) 1 One degree of freedom systems in real life 2 1 Reduction of a system to a one dof system Example
Fourier Series and Fourier Transforms
 Fourier Series and Fourier Transforms EECS2 (6.082), MIT Fall 2006 Lectures 2 and 3 Fourier Series From your differential equations course, 18.03, you know Fourier s expression representing a T -periodic
Fourier Series and Fourier Transforms EECS2 (6.082), MIT Fall 2006 Lectures 2 and 3 Fourier Series From your differential equations course, 18.03, you know Fourier s expression representing a T -periodic
Control of Manufacturing Processes
 Control of Manufacturing Processes Subject 2.830 Spring 2004 Lecture #19 Position Control and Root Locus Analysis" April 22, 2004 The Position Servo Problem, reference position NC Control Robots Injection
Control of Manufacturing Processes Subject 2.830 Spring 2004 Lecture #19 Position Control and Root Locus Analysis" April 22, 2004 The Position Servo Problem, reference position NC Control Robots Injection
Vibrations and waves: revision. Martin Dove Queen Mary University of London
 Vibrations and waves: revision Martin Dove Queen Mary University of London Form of the examination Part A = 50%, 10 short questions, no options Part B = 50%, Answer questions from a choice of 4 Total exam
Vibrations and waves: revision Martin Dove Queen Mary University of London Form of the examination Part A = 50%, 10 short questions, no options Part B = 50%, Answer questions from a choice of 4 Total exam
Chapter 4: The State Space and Numerical Simulation
 Chapter 4: The State Space and Numerical Simulation Samantha Ramirez Preview Questions What mathematical formulation might we apply to the models we derived in the previous chapter in order to facilitate
Chapter 4: The State Space and Numerical Simulation Samantha Ramirez Preview Questions What mathematical formulation might we apply to the models we derived in the previous chapter in order to facilitate
Mathematical Preliminaries and Review
 Mathematical Preliminaries and Review Ruye Wang for E59 1 Complex Variables and Sinusoids AcomplexnumbercanberepresentedineitherCartesianorpolarcoordinatesystem: z = x + jy= z z = re jθ = r(cos θ + j sin
Mathematical Preliminaries and Review Ruye Wang for E59 1 Complex Variables and Sinusoids AcomplexnumbercanberepresentedineitherCartesianorpolarcoordinatesystem: z = x + jy= z z = re jθ = r(cos θ + j sin
Time Response Analysis (Part II)
") Time Response Analysis (Part II). A critically damped, continuous-time, second order system, when sampled, will have (in Z domain) (a) A simple pole (b) Double pole on real axis (c) Double pole on imaginary
Time Response Analysis (Part II). A critically damped, continuous-time, second order system, when sampled, will have (in Z domain) (a) A simple pole (b) Double pole on real axis (c) Double pole on imaginary
TOPIC E: OSCILLATIONS SPRING 2019
 TOPIC E: OSCILLATIONS SPRING 2019 1. Introduction 1.1 Overview 1.2 Degrees of freedom 1.3 Simple harmonic motion 2. Undamped free oscillation 2.1 Generalised mass-spring system: simple harmonic motion
TOPIC E: OSCILLATIONS SPRING 2019 1. Introduction 1.1 Overview 1.2 Degrees of freedom 1.3 Simple harmonic motion 2. Undamped free oscillation 2.1 Generalised mass-spring system: simple harmonic motion
Phasor Young Won Lim 05/19/2015
 Phasor Copyright (c) 2009-2015 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later version
Phasor Copyright (c) 2009-2015 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later version
1 Notes on Laplace circuit analysis
 Physics - David Kleinfeld - Spring 7 Notes on aplace circuit analysis Background We previously learned that we can transform from the time domain to the frequency domain under steady-state conditions thus
Physics - David Kleinfeld - Spring 7 Notes on aplace circuit analysis Background We previously learned that we can transform from the time domain to the frequency domain under steady-state conditions thus
Section 3: Complex numbers
 Essentially: Section 3: Complex numbers C (set of complex numbers) up to different notation: the same as R 2 (euclidean plane), (i) Write the real 1 instead of the first elementary unit vector e 1 = (1,
Essentially: Section 3: Complex numbers C (set of complex numbers) up to different notation: the same as R 2 (euclidean plane), (i) Write the real 1 instead of the first elementary unit vector e 1 = (1,
Lecture 16: Zeros and Poles
 Lecture 16: Zeros and Poles ECE 401: Signal and Image Analysis University of Illinois 4/6/2017 1 Poles and Zeros at DC 2 Poles and Zeros with Nonzero Bandwidth 3 Poles and Zeros with Nonzero Center Frequency
Lecture 16: Zeros and Poles ECE 401: Signal and Image Analysis University of Illinois 4/6/2017 1 Poles and Zeros at DC 2 Poles and Zeros with Nonzero Bandwidth 3 Poles and Zeros with Nonzero Center Frequency
Laboratory notes. Torsional Vibration Absorber
 Titurus, Marsico & Wagg Torsional Vibration Absorber UoB/1-11, v1. Laboratory notes Torsional Vibration Absorber Contents 1 Objectives... Apparatus... 3 Theory... 3 3.1 Background information... 3 3. Undamped
Titurus, Marsico & Wagg Torsional Vibration Absorber UoB/1-11, v1. Laboratory notes Torsional Vibration Absorber Contents 1 Objectives... Apparatus... 3 Theory... 3 3.1 Background information... 3 3. Undamped
1. (10 points) Find the general solution to the following second-order differential equation:
 Find the general solution to the following second-order differential equation:") Math 307A, Winter 014 Midterm Solutions Page 1 of 8 1. (10 points) Find the general solution to the following second-order differential equation: 4y 1y + 9y = 9t. To find the general solution to this nonhomogeneous
Math 307A, Winter 014 Midterm Solutions Page 1 of 8 1. (10 points) Find the general solution to the following second-order differential equation: 4y 1y + 9y = 9t. To find the general solution to this nonhomogeneous
Outline of parts 1 and 2
 to Harmonic Loading http://intranet.dica.polimi.it/people/boffi-giacomo Dipartimento di Ingegneria Civile Ambientale e Territoriale Politecnico di Milano March, 6 Outline of parts and of an Oscillator
to Harmonic Loading http://intranet.dica.polimi.it/people/boffi-giacomo Dipartimento di Ingegneria Civile Ambientale e Territoriale Politecnico di Milano March, 6 Outline of parts and of an Oscillator
EDEXCEL NATIONAL CERTIFICATE UNIT 28 FURTHER MATHEMATICS FOR TECHNICIANS OUTCOME 3 TUTORIAL 1 - TRIGONOMETRICAL GRAPHS
 EDEXCEL NATIONAL CERTIFICATE UNIT 28 FURTHER MATHEMATICS FOR TECHNICIANS OUTCOME 3 TUTORIAL 1 - TRIGONOMETRICAL GRAPHS CONTENTS 3 Be able to understand how to manipulate trigonometric expressions and apply
EDEXCEL NATIONAL CERTIFICATE UNIT 28 FURTHER MATHEMATICS FOR TECHNICIANS OUTCOME 3 TUTORIAL 1 - TRIGONOMETRICAL GRAPHS CONTENTS 3 Be able to understand how to manipulate trigonometric expressions and apply
School of Mechanical Engineering Purdue University
 Case Study ME375 Frequency Response - 1 Case Study SUPPORT POWER WIRE DROPPERS Electric train derives power through a pantograph, which contacts the power wire, which is suspended from a catenary. During
Case Study ME375 Frequency Response - 1 Case Study SUPPORT POWER WIRE DROPPERS Electric train derives power through a pantograph, which contacts the power wire, which is suspended from a catenary. During
Dr. Ian R. Manchester
 Dr Ian R. Manchester Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus
Dr Ian R. Manchester Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus
09/29/2009 Reading: Hambley Chapter 5 and Appendix A
 EE40 Lec 10 Complex Numbers and Phasors Prof. Nathan Cheung 09/29/2009 Reading: Hambley Chapter 5 and Appendix A Slide 1 OUTLINE Phasors as notation for Sinusoids Arithmetic with Complex Numbers Complex
EE40 Lec 10 Complex Numbers and Phasors Prof. Nathan Cheung 09/29/2009 Reading: Hambley Chapter 5 and Appendix A Slide 1 OUTLINE Phasors as notation for Sinusoids Arithmetic with Complex Numbers Complex
4.2 Homogeneous Linear Equations
 4.2 Homogeneous Linear Equations Homogeneous Linear Equations with Constant Coefficients Consider the first-order linear differential equation with constant coefficients a 0 and b. If f(t) = 0 then this
4.2 Homogeneous Linear Equations Homogeneous Linear Equations with Constant Coefficients Consider the first-order linear differential equation with constant coefficients a 0 and b. If f(t) = 0 then this
EE100Su08 Lecture #11 (July 21 st 2008)
") EE100Su08 Lecture #11 (July 21 st 2008) Bureaucratic Stuff Lecture videos should be up by tonight HW #2: Pick up from office hours today, will leave them in lab. REGRADE DEADLINE: Monday, July 28 th 2008,
EE100Su08 Lecture #11 (July 21 st 2008) Bureaucratic Stuff Lecture videos should be up by tonight HW #2: Pick up from office hours today, will leave them in lab. REGRADE DEADLINE: Monday, July 28 th 2008,
Signals and Systems: Introduction
 Dependent variable Signals and Systems: Introduction What is a signal? Signals may describe a wide variety of physical phenomena. The information in a signal is contained in a pattern of variations of
Dependent variable Signals and Systems: Introduction What is a signal? Signals may describe a wide variety of physical phenomena. The information in a signal is contained in a pattern of variations of
Lecture 6: Differential Equations Describing Vibrations
 Lecture 6: Differential Equations Describing Vibrations In Chapter 3 of the Benson textbook, we will look at how various types of musical instruments produce sound, focusing on issues like how the construction
Lecture 6: Differential Equations Describing Vibrations In Chapter 3 of the Benson textbook, we will look at how various types of musical instruments produce sound, focusing on issues like how the construction
Multi Degrees of Freedom Systems
 Multi Degrees of Freedom Systems MDOF s http://intranet.dica.polimi.it/people/boffi-giacomo Dipartimento di Ingegneria Civile Ambientale e Territoriale Politecnico di Milano March 9, 07 Outline, a System
Multi Degrees of Freedom Systems MDOF s http://intranet.dica.polimi.it/people/boffi-giacomo Dipartimento di Ingegneria Civile Ambientale e Territoriale Politecnico di Milano March 9, 07 Outline, a System
Music 270a: Complex Exponentials and Spectrum Representation
 Music 270a: Complex Exponentials and Spectrum Representation Tamara Smyth, trsmyth@ucsd.edu Department of Music, University of California, San Diego (UCSD) October 24, 2016 1 Exponentials The exponential
Music 270a: Complex Exponentials and Spectrum Representation Tamara Smyth, trsmyth@ucsd.edu Department of Music, University of California, San Diego (UCSD) October 24, 2016 1 Exponentials The exponential
Sinusoidal Forcing of a First-Order Process. / τ
 Frequency Response Analysis Chapter 3 Sinusoidal Forcing of a First-Order Process For a first-order transfer function with gain K and time constant τ, the response to a general sinusoidal input, xt = A
Frequency Response Analysis Chapter 3 Sinusoidal Forcing of a First-Order Process For a first-order transfer function with gain K and time constant τ, the response to a general sinusoidal input, xt = A
2.010 Fall 2000 Solution of Homework Assignment 1
 2. Fall 2 Solution of Homework Assignment. Compact Disk Player. This is essentially a reprise of Problems and 2 from the Fall 999 2.3 Homework Assignment 7. t is included here to encourage you to review
2. Fall 2 Solution of Homework Assignment. Compact Disk Player. This is essentially a reprise of Problems and 2 from the Fall 999 2.3 Homework Assignment 7. t is included here to encourage you to review
Poles, Zeros and System Response
 Time Response After the engineer obtains a mathematical representation of a subsystem, the subsystem is analyzed for its transient and steady state responses to see if these characteristics yield the desired
Time Response After the engineer obtains a mathematical representation of a subsystem, the subsystem is analyzed for its transient and steady state responses to see if these characteristics yield the desired
( ) Frequency Response Analysis. Sinusoidal Forcing of a First-Order Process. Chapter 13. ( ) sin ω () (
 Frequency Response Analysis. Sinusoidal Forcing of a First-Order Process. Chapter 13. ( ) sin ω () (") 1 Frequency Response Analysis Sinusoidal Forcing of a First-Order Process For a first-order transfer function with gain K and time constant τ, the response to a general sinusoidal input, xt = A tis: sin
1 Frequency Response Analysis Sinusoidal Forcing of a First-Order Process For a first-order transfer function with gain K and time constant τ, the response to a general sinusoidal input, xt = A tis: sin
Double Spring Harmonic Oscillator Lab
 Dylan Humenik and Benjamin Daily Double Spring Harmonic Oscillator Lab Objectives: -Experimentally determine harmonic equations for a double spring system using various methods Part 1 Determining k of
Dylan Humenik and Benjamin Daily Double Spring Harmonic Oscillator Lab Objectives: -Experimentally determine harmonic equations for a double spring system using various methods Part 1 Determining k of
NORMAL MODES, WAVE MOTION AND THE WAVE EQUATION. Professor G.G.Ross. Oxford University Hilary Term 2009
 NORMAL MODES, WAVE MOTION AND THE WAVE EQUATION Professor G.G.Ross Oxford University Hilary Term 009 This course of twelve lectures covers material for the paper CP4: Differential Equations, Waves and
NORMAL MODES, WAVE MOTION AND THE WAVE EQUATION Professor G.G.Ross Oxford University Hilary Term 009 This course of twelve lectures covers material for the paper CP4: Differential Equations, Waves and
Singular Value Decomposition Analysis
 Singular Value Decomposition Analysis Singular Value Decomposition Analysis Introduction Introduce a linear algebra tool: singular values of a matrix Motivation Why do we need singular values in MIMO control
Singular Value Decomposition Analysis Singular Value Decomposition Analysis Introduction Introduce a linear algebra tool: singular values of a matrix Motivation Why do we need singular values in MIMO control
Introduction. Performance and Robustness (Chapter 1) Advanced Control Systems Spring / 31
 Advanced Control Systems Spring / 31") Introduction Classical Control Robust Control u(t) y(t) G u(t) G + y(t) G : nominal model G = G + : plant uncertainty Uncertainty sources : Structured : parametric uncertainty, multimodel uncertainty Unstructured
Introduction Classical Control Robust Control u(t) y(t) G u(t) G + y(t) G : nominal model G = G + : plant uncertainty Uncertainty sources : Structured : parametric uncertainty, multimodel uncertainty Unstructured
Math 216 Second Midterm 16 November, 2017
 Math 216 Second Midterm 16 November, 2017 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material
Math 216 Second Midterm 16 November, 2017 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material
PREMED COURSE, 14/08/2015 OSCILLATIONS
 PREMED COURSE, 14/08/2015 OSCILLATIONS PERIODIC MOTIONS Mechanical Metronom Laser Optical Bunjee jumping Electrical Astronomical Pulsar Biological ECG AC 50 Hz Another biological exampe PERIODIC MOTIONS
PREMED COURSE, 14/08/2015 OSCILLATIONS PERIODIC MOTIONS Mechanical Metronom Laser Optical Bunjee jumping Electrical Astronomical Pulsar Biological ECG AC 50 Hz Another biological exampe PERIODIC MOTIONS
SCHOOL OF MATHEMATICS MATHEMATICS FOR PART I ENGINEERING. Self-paced Course
 SCHOOL OF MATHEMATICS MATHEMATICS FOR PART I ENGINEERING Self-paced Course MODULE 26 APPLICATIONS TO ELECTRICAL CIRCUITS Module Topics 1. Complex numbers and alternating currents 2. Complex impedance 3.
SCHOOL OF MATHEMATICS MATHEMATICS FOR PART I ENGINEERING Self-paced Course MODULE 26 APPLICATIONS TO ELECTRICAL CIRCUITS Module Topics 1. Complex numbers and alternating currents 2. Complex impedance 3.
4.9 Free Mechanical Vibrations
 4.9 Free Mechanical Vibrations Spring-Mass Oscillator When the spring is not stretched and the mass m is at rest, the system is at equilibrium. Forces Acting in the System When the mass m is displaced
4.9 Free Mechanical Vibrations Spring-Mass Oscillator When the spring is not stretched and the mass m is at rest, the system is at equilibrium. Forces Acting in the System When the mass m is displaced
Lab 1: Damped, Driven Harmonic Oscillator
 1 Introduction Lab 1: Damped, Driven Harmonic Oscillator The purpose of this experiment is to study the resonant properties of a driven, damped harmonic oscillator. This type of motion is characteristic
1 Introduction Lab 1: Damped, Driven Harmonic Oscillator The purpose of this experiment is to study the resonant properties of a driven, damped harmonic oscillator. This type of motion is characteristic
Control Systems I. Lecture 5: Transfer Functions. Readings: Emilio Frazzoli. Institute for Dynamic Systems and Control D-MAVT ETH Zürich
 Control Systems I Lecture 5: Transfer Functions Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 20, 2017 E. Frazzoli (ETH) Lecture 5: Control Systems I 20/10/2017
Control Systems I Lecture 5: Transfer Functions Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 20, 2017 E. Frazzoli (ETH) Lecture 5: Control Systems I 20/10/2017
Lab 1: damped, driven harmonic oscillator
 Lab 1: damped, driven harmonic oscillator 1 Introduction The purpose of this experiment is to study the resonant properties of a driven, damped harmonic oscillator. This type of motion is characteristic
Lab 1: damped, driven harmonic oscillator 1 Introduction The purpose of this experiment is to study the resonant properties of a driven, damped harmonic oscillator. This type of motion is characteristic