An Integrated Approach to Occupancy Modeling and Estimation in Commercial Buildings
|
|
|
- Oswin Burns
- 5 years ago
- Views:
Transcription
1 An Integrated Approach to Occupancy Modeling and Estimation in Commercial Buildings Chenda Liao and Prabir Barooah Distributed Control System Lab Mechanical and Aerospace Engineering University of Florida, Gainesville, FL American Control Conference July 1 st, 2010 Baltimore, Maryland, USA




2 Introduction 2006 Commercial Energy End-Use Expenditures ($2006 Billion) Cooking 2% Other 13% Adjust to SEDS 9% Lighting 23% Computers 4% Space Heating 13% Refrigeration 5% Ventilation 6% Space Cooling 11% Electronics 7% Water Heating 7% 2009 buildings energy databook
 Optical tripwires Video camera with peoplecounting software CO2 sensor Problems: Expensive")

3 Why not use a lot of sensors? Occupancy sensor Passive Infrared Sensor (PIR) Optical tripwires Video camera with peoplecounting software CO2 sensor Problems: Expensive to deploy and maintain for large building. Sensors contain large uncertainty. Image courtesy of Image courtesy of Hutchins et. al Solution: Model+Sensor=Estimation Sean Meyn, et al, A Sensor-Utility-Network Method for Estimation of Occupancy Distribution in Buildings, CDC, 2009: MAP Estimator Utility function(prior information) + measurement from multiple sensors





4 Model+Sensor Solution: Model+Sensor=Estimation Covariance graphical model Floor Plan Representation Limited number of sensors Graph Representation Covariance Graphical Model Varying with time


5 o Input: Noisy sensor measurement: Covariance graphical model: Occupancy Estimation o Estimation method: Linear Minimum Variance estimator. o Output: where and The main focus

6 Agent-based Model Flows: Evacuation, traffic, crowd flow, etc. Markets: Stock market, strategic simulation, etc. Organizations: Operational risk, organizational design, etc. Image courtesy of : Page model: J. Page, et al A generalized stochastic model for the simulation of occupant presence, 2007 States: inside and outside ( One occupant in one room) Long absence
7 Model Construction Mixed Agent-based Rules (MARM)
8 Preliminary model validation Preliminary: One occupant in one room Data is provided by Dr. Robinson (Co-author of A generalized stochastic model for the simulation of occupant presence ) First arrival time Last departure time Total duration of daily presence Length of continuous presence Number of daily change Probability of presence

9 Covariance graph model identification Goal: estimate the sparsest possible graph structure that can still explain the first and second order statistics of the data. Individual level Room level Estimation of covariance matrix Drton et.al, Model selection for Gaussian concentration graphs, Biometrika, 2004 Chaudhuri et.al, Estimation of a covariance matrix with zeros, Biometrika, 2007 Model selection Parameter estimation

10 Performance Evaluation Building information: MAE-B third floor, 19 nodes, 54 people work there Obtainment of Informal survey nominal behavior: True value Time series from agent-based model plus random number of people Sensor placement 7 sensors, which can directly measure occupancy Sensor Model




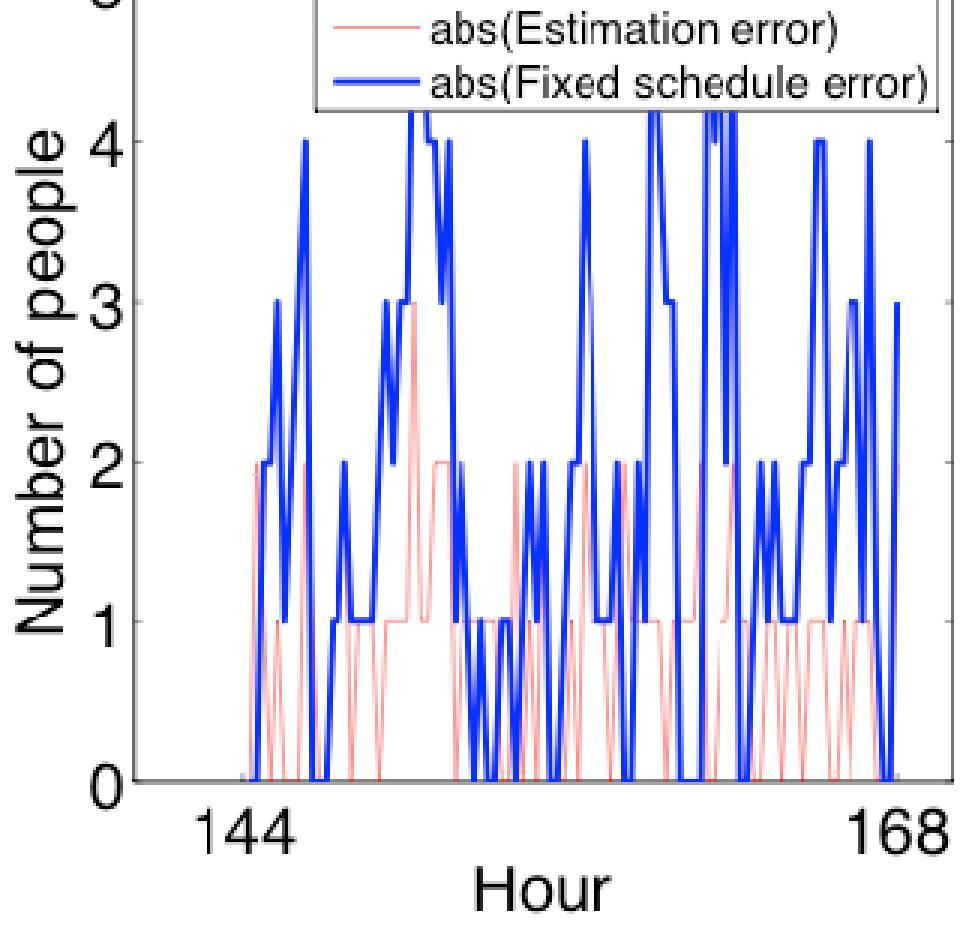


11 Performance Evaluation


12 Summary and Future Work Summary Agent-based model construction and preliminary validation. Covariance graphical models identification. Model+Sensor=Estimation Future work Agent-based model validation for the whole floor. Refine the estimation method and design on-line updating of covariance model. Perform real time estimation.

13 Thank you
14 Backup

15 Page model Page model: o Focus on individual occupancy behavior by developing a generalized stochastic model for the simulation of occupant presence with derived probability distributions based on inhomogeneous Markov chains. If, based on and, we generate the new random variable. In this fashion, we generate the time series of room occupancy, Page. et. al. 2008
16 Page model Benefit of Markov chain: mimic the real life ( sensor data) and smooth the series of room occupancy (generated data). The algorithm for the generation of time series of transition probability is just designed for single-occupied offices case.(1 person and 1 room). It will be cumbersome to implement such algorithm for one person and multiple rooms case, to say nothing of multiple persons and multiple rooms case. (too many states). Intuitively, Goal: Make a model with ability to deal with the case of multiple persons and rooms, but keep the similar good property in Markov chain.
17 Algorithm Flow Chart

18 Behavior specification Behavior specification for each agent: o Nominal occupancy profile: Where Two transition probability parameters: o Damping rule parameter o Acceleration rule parameter Long absence profile: o Probability of initiating a long absence o Distribution of duration of long absence
19 Multiple rules Multiple rules for each agents: o Damping and acceleration rules To redesign the state chosen from nominal occupancy profiles in order to mimic Markov property. Damping parameter o Access rule Each agent has associated access profile specified which rooms he/she has access to.


20 Multiple rules
21 Model Selection Model selection o Choose the structure of the graph G. (or equivalently, the sparsity pattern of ) 1Conduct N Monte-Carlo experiments using agent-based model, for every time k, we compute: Sample mean: Sample covariance: 2Hypotheses on all edges (all entries of level determined by a design parameter ) at an overall confidence

22 Parameter estimation Parameter estimation o Choose the values of those entries of that have been decided to be non-zero in the model selection step. ----An iterative conditional fitting algorithm based on maximum likelihood estimation is used for estimating the values of the non-zero entries of.
23 Occupancy Estimation Linear Minimum Variance estimator: Consider two jointly distributed random vectors X and Y whose means and covariance are assumed known, we want to find the linear estimator of X in terms of Y that is best in the sense that minimizes: Solution: Where and
24 Identification Result
Probabilistic Graphical Models
 Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 13: Learning in Gaussian Graphical Models, Non-Gaussian Inference, Monte Carlo Methods Some figures
Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 13: Learning in Gaussian Graphical Models, Non-Gaussian Inference, Monte Carlo Methods Some figures
F denotes cumulative density. denotes probability density function; (.)
") BAYESIAN ANALYSIS: FOREWORDS Notation. System means the real thing and a model is an assumed mathematical form for the system.. he probability model class M contains the set of the all admissible models
BAYESIAN ANALYSIS: FOREWORDS Notation. System means the real thing and a model is an assumed mathematical form for the system.. he probability model class M contains the set of the all admissible models
Bayesian Networks BY: MOHAMAD ALSABBAGH
 Bayesian Networks BY: MOHAMAD ALSABBAGH Outlines Introduction Bayes Rule Bayesian Networks (BN) Representation Size of a Bayesian Network Inference via BN BN Learning Dynamic BN Introduction Conditional
Bayesian Networks BY: MOHAMAD ALSABBAGH Outlines Introduction Bayes Rule Bayesian Networks (BN) Representation Size of a Bayesian Network Inference via BN BN Learning Dynamic BN Introduction Conditional
Linear Dynamical Systems
 Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Building Thermal Model Reduction via Aggregation of States
 200 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 30-July 02, 200 FrA2.5 Building Thermal Model Reduction via Aggregation of States Kun Deng, Prabir Barooah, Prashant G. Mehta,
200 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 30-July 02, 200 FrA2.5 Building Thermal Model Reduction via Aggregation of States Kun Deng, Prabir Barooah, Prashant G. Mehta,
Proximity-Based Anomaly Detection using Sparse Structure Learning
 Proximity-Based Anomaly Detection using Sparse Structure Learning Tsuyoshi Idé (IBM Tokyo Research Lab) Aurelie C. Lozano, Naoki Abe, and Yan Liu (IBM T. J. Watson Research Center) 2009/04/ SDM 2009 /
Proximity-Based Anomaly Detection using Sparse Structure Learning Tsuyoshi Idé (IBM Tokyo Research Lab) Aurelie C. Lozano, Naoki Abe, and Yan Liu (IBM T. J. Watson Research Center) 2009/04/ SDM 2009 /
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
Why Correlation Matters in Cost Estimating
 Why Correlation Matters in Cost Estimating Stephen A. Book The Aerospace Corporation P.O. Box 92957 Los Angeles, CA 90009-29597 (310) 336-8655 stephen.a.book@aero.org 32nd Annual DoD Cost Analysis Symposium
Why Correlation Matters in Cost Estimating Stephen A. Book The Aerospace Corporation P.O. Box 92957 Los Angeles, CA 90009-29597 (310) 336-8655 stephen.a.book@aero.org 32nd Annual DoD Cost Analysis Symposium
An introduction to particle filters
 An introduction to particle filters Andreas Svensson Department of Information Technology Uppsala University June 10, 2014 June 10, 2014, 1 / 16 Andreas Svensson - An introduction to particle filters Outline
An introduction to particle filters Andreas Svensson Department of Information Technology Uppsala University June 10, 2014 June 10, 2014, 1 / 16 Andreas Svensson - An introduction to particle filters Outline
Computer Vision Group Prof. Daniel Cremers. 14. Sampling Methods
 Prof. Daniel Cremers 14. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 14. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 7 Approximate
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 7 Approximate
PART I INTRODUCTION The meaning of probability Basic definitions for frequentist statistics and Bayesian inference Bayesian inference Combinatorics
 Table of Preface page xi PART I INTRODUCTION 1 1 The meaning of probability 3 1.1 Classical definition of probability 3 1.2 Statistical definition of probability 9 1.3 Bayesian understanding of probability
Table of Preface page xi PART I INTRODUCTION 1 1 The meaning of probability 3 1.1 Classical definition of probability 3 1.2 Statistical definition of probability 9 1.3 Bayesian understanding of probability
Recent Advances in Bayesian Inference Techniques
 Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
2D Image Processing (Extended) Kalman and particle filter
 Kalman and particle filter") 2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
Bayesian System Identification based on Hierarchical Sparse Bayesian Learning and Gibbs Sampling with Application to Structural Damage Assessment
 Bayesian System Identification based on Hierarchical Sparse Bayesian Learning and Gibbs Sampling with Application to Structural Damage Assessment Yong Huang a,b, James L. Beck b,* and Hui Li a a Key Lab
Bayesian System Identification based on Hierarchical Sparse Bayesian Learning and Gibbs Sampling with Application to Structural Damage Assessment Yong Huang a,b, James L. Beck b,* and Hui Li a a Key Lab
Approximating a single component of the solution to a linear system
 Approximating a single component of the solution to a linear system Christina E. Lee, Asuman Ozdaglar, Devavrat Shah celee@mit.edu asuman@mit.edu devavrat@mit.edu MIT LIDS 1 How do I compare to my competitors?
Approximating a single component of the solution to a linear system Christina E. Lee, Asuman Ozdaglar, Devavrat Shah celee@mit.edu asuman@mit.edu devavrat@mit.edu MIT LIDS 1 How do I compare to my competitors?
Gaussian with mean ( µ ) and standard deviation ( σ)
 and standard deviation ( σ)") Slide from Pieter Abbeel Gaussian with mean ( µ ) and standard deviation ( σ) 10/6/16 CSE-571: Robotics X ~ N( µ, σ ) Y ~ N( aµ + b, a σ ) Y = ax + b + + + + 1 1 1 1 1 1 1 1 1 1, ~ ) ( ) ( ), ( ~ ), (
Slide from Pieter Abbeel Gaussian with mean ( µ ) and standard deviation ( σ) 10/6/16 CSE-571: Robotics X ~ N( µ, σ ) Y ~ N( aµ + b, a σ ) Y = ax + b + + + + 1 1 1 1 1 1 1 1 1 1, ~ ) ( ) ( ), ( ~ ), (
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Supplementary Note on Bayesian analysis
 Supplementary Note on Bayesian analysis Structured variability of muscle activations supports the minimal intervention principle of motor control Francisco J. Valero-Cuevas 1,2,3, Madhusudhan Venkadesan
Supplementary Note on Bayesian analysis Structured variability of muscle activations supports the minimal intervention principle of motor control Francisco J. Valero-Cuevas 1,2,3, Madhusudhan Venkadesan
27 : Distributed Monte Carlo Markov Chain. 1 Recap of MCMC and Naive Parallel Gibbs Sampling
 10-708: Probabilistic Graphical Models 10-708, Spring 2014 27 : Distributed Monte Carlo Markov Chain Lecturer: Eric P. Xing Scribes: Pengtao Xie, Khoa Luu In this scribe, we are going to review the Parallel
10-708: Probabilistic Graphical Models 10-708, Spring 2014 27 : Distributed Monte Carlo Markov Chain Lecturer: Eric P. Xing Scribes: Pengtao Xie, Khoa Luu In this scribe, we are going to review the Parallel
Computer Simulation and Applications in Life Sciences. Dr. Michael Emmerich & Dr. Andre Deutz LIACS
 Computer Simulation and Applications in Life Sciences Dr. Michael Emmerich & Dr. Andre Deutz LIACS Part 0: Course Preliminaries Course Preliminaries The course consists of 13 lectures + exercises Exercises
Computer Simulation and Applications in Life Sciences Dr. Michael Emmerich & Dr. Andre Deutz LIACS Part 0: Course Preliminaries Course Preliminaries The course consists of 13 lectures + exercises Exercises
Dynamic System Identification using HDMR-Bayesian Technique
 Dynamic System Identification using HDMR-Bayesian Technique *Shereena O A 1) and Dr. B N Rao 2) 1), 2) Department of Civil Engineering, IIT Madras, Chennai 600036, Tamil Nadu, India 1) ce14d020@smail.iitm.ac.in
Dynamic System Identification using HDMR-Bayesian Technique *Shereena O A 1) and Dr. B N Rao 2) 1), 2) Department of Civil Engineering, IIT Madras, Chennai 600036, Tamil Nadu, India 1) ce14d020@smail.iitm.ac.in
Probabilistic Graphical Models
 Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 12: Gaussian Belief Propagation, State Space Models and Kalman Filters Guest Kalman Filter Lecture by
Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 12: Gaussian Belief Propagation, State Space Models and Kalman Filters Guest Kalman Filter Lecture by
Multiple Regression Analysis
 Chapter 4 Multiple Regression Analysis The simple linear regression covered in Chapter 2 can be generalized to include more than one variable. Multiple regression analysis is an extension of the simple
Chapter 4 Multiple Regression Analysis The simple linear regression covered in Chapter 2 can be generalized to include more than one variable. Multiple regression analysis is an extension of the simple
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods: Markov Chain Monte Carlo
 Group Prof. Daniel Cremers 11. Sampling Methods: Markov Chain Monte Carlo Markov Chain Monte Carlo In high-dimensional spaces, rejection sampling and importance sampling are very inefficient An alternative
Group Prof. Daniel Cremers 11. Sampling Methods: Markov Chain Monte Carlo Markov Chain Monte Carlo In high-dimensional spaces, rejection sampling and importance sampling are very inefficient An alternative
Bayesian hierarchical methods for sea turtle mixed stock analysis
 Bayesian hierarchical methods for sea turtle mixed stock analysis Ben Bolker Department of Zoology & Archie Carr Center for Sea Turtle Research University of Florida 9 December 2003 Outline Background
Bayesian hierarchical methods for sea turtle mixed stock analysis Ben Bolker Department of Zoology & Archie Carr Center for Sea Turtle Research University of Florida 9 December 2003 Outline Background
Gaussian Processes 1. Schedule
 1 Schedule 17 Jan: Gaussian processes (Jo Eidsvik) 24 Jan: Hands-on project on Gaussian processes (Team effort, work in groups) 31 Jan: Latent Gaussian models and INLA (Jo Eidsvik) 7 Feb: Hands-on project
1 Schedule 17 Jan: Gaussian processes (Jo Eidsvik) 24 Jan: Hands-on project on Gaussian processes (Team effort, work in groups) 31 Jan: Latent Gaussian models and INLA (Jo Eidsvik) 7 Feb: Hands-on project
High-dimensional Problems in Finance and Economics. Thomas M. Mertens
 High-dimensional Problems in Finance and Economics Thomas M. Mertens NYU Stern Risk Economics Lab April 17, 2012 1 / 78 Motivation Many problems in finance and economics are high dimensional. Dynamic Optimization:
High-dimensional Problems in Finance and Economics Thomas M. Mertens NYU Stern Risk Economics Lab April 17, 2012 1 / 78 Motivation Many problems in finance and economics are high dimensional. Dynamic Optimization:
Constrained data assimilation. W. Carlisle Thacker Atlantic Oceanographic and Meteorological Laboratory Miami, Florida USA
 Constrained data assimilation W. Carlisle Thacker Atlantic Oceanographic and Meteorological Laboratory Miami, Florida 33149 USA Plan Range constraints: : HYCOM layers have minimum thickness. Optimal interpolation:
Constrained data assimilation W. Carlisle Thacker Atlantic Oceanographic and Meteorological Laboratory Miami, Florida 33149 USA Plan Range constraints: : HYCOM layers have minimum thickness. Optimal interpolation:
Components for Accurate Forecasting & Continuous Forecast Improvement
 Components for Accurate Forecasting & Continuous Forecast Improvement An ISIS Solutions White Paper November 2009 Page 1 Achieving forecast accuracy for business applications one year in advance requires
Components for Accurate Forecasting & Continuous Forecast Improvement An ISIS Solutions White Paper November 2009 Page 1 Achieving forecast accuracy for business applications one year in advance requires
Methods for sparse analysis of high-dimensional data, II
 Methods for sparse analysis of high-dimensional data, II Rachel Ward May 23, 2011 High dimensional data with low-dimensional structure 300 by 300 pixel images = 90, 000 dimensions 2 / 47 High dimensional
Methods for sparse analysis of high-dimensional data, II Rachel Ward May 23, 2011 High dimensional data with low-dimensional structure 300 by 300 pixel images = 90, 000 dimensions 2 / 47 High dimensional
Machine Learning Techniques for Computer Vision
 Machine Learning Techniques for Computer Vision Part 2: Unsupervised Learning Microsoft Research Cambridge x 3 1 0.5 0.2 0 0.5 0.3 0 0.5 1 ECCV 2004, Prague x 2 x 1 Overview of Part 2 Mixture models EM
Machine Learning Techniques for Computer Vision Part 2: Unsupervised Learning Microsoft Research Cambridge x 3 1 0.5 0.2 0 0.5 0.3 0 0.5 1 ECCV 2004, Prague x 2 x 1 Overview of Part 2 Mixture models EM
Introduction to Mobile Robotics Information Gain-Based Exploration. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras
 Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
Introduction to Machine Learning
 Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Kalman filtering and friends: Inference in time series models. Herke van Hoof slides mostly by Michael Rubinstein
 Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Bayesian Regression Linear and Logistic Regression
 When we want more than point estimates Bayesian Regression Linear and Logistic Regression Nicole Beckage Ordinary Least Squares Regression and Lasso Regression return only point estimates But what if we
When we want more than point estimates Bayesian Regression Linear and Logistic Regression Nicole Beckage Ordinary Least Squares Regression and Lasso Regression return only point estimates But what if we
Probabilistic Graphical Models
 Probabilistic Graphical Models Brown University CSCI 295-P, Spring 213 Prof. Erik Sudderth Lecture 11: Inference & Learning Overview, Gaussian Graphical Models Some figures courtesy Michael Jordan s draft
Probabilistic Graphical Models Brown University CSCI 295-P, Spring 213 Prof. Erik Sudderth Lecture 11: Inference & Learning Overview, Gaussian Graphical Models Some figures courtesy Michael Jordan s draft
Approximate Bayesian Computation and Particle Filters
 Approximate Bayesian Computation and Particle Filters Dennis Prangle Reading University 5th February 2014 Introduction Talk is mostly a literature review A few comments on my own ongoing research See Jasra
Approximate Bayesian Computation and Particle Filters Dennis Prangle Reading University 5th February 2014 Introduction Talk is mostly a literature review A few comments on my own ongoing research See Jasra
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics
 Subramanian Ramamoorthy School of Informatics") Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Predictive Microbiology (theory)
") (theory) Kostas Koutsoumanis Head of Lab of Food Microbiology and Hygiene Dpt. Of Food Science and Technology Aristotle University of Thessaloniki Summer School In Silico Methods for Food Safety THE CONCEPT
(theory) Kostas Koutsoumanis Head of Lab of Food Microbiology and Hygiene Dpt. Of Food Science and Technology Aristotle University of Thessaloniki Summer School In Silico Methods for Food Safety THE CONCEPT
1 Kalman Filter Introduction
 1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
Biol 206/306 Advanced Biostatistics Lab 12 Bayesian Inference
 Biol 206/306 Advanced Biostatistics Lab 12 Bayesian Inference By Philip J. Bergmann 0. Laboratory Objectives 1. Learn what Bayes Theorem and Bayesian Inference are 2. Reinforce the properties of Bayesian
Biol 206/306 Advanced Biostatistics Lab 12 Bayesian Inference By Philip J. Bergmann 0. Laboratory Objectives 1. Learn what Bayes Theorem and Bayesian Inference are 2. Reinforce the properties of Bayesian
Variational Bayesian Inference Techniques
 Advanced Signal Processing 2, SE Variational Bayesian Inference Techniques Johann Steiner 1 Outline Introduction Sparse Signal Reconstruction Sparsity Priors Benefits of Sparse Bayesian Inference Variational
Advanced Signal Processing 2, SE Variational Bayesian Inference Techniques Johann Steiner 1 Outline Introduction Sparse Signal Reconstruction Sparsity Priors Benefits of Sparse Bayesian Inference Variational
Bayesian Methods for Machine Learning
 Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
The Particle Filter. PD Dr. Rudolph Triebel Computer Vision Group. Machine Learning for Computer Vision
 The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
Biol 206/306 Advanced Biostatistics Lab 12 Bayesian Inference Fall 2016
 Biol 206/306 Advanced Biostatistics Lab 12 Bayesian Inference Fall 2016 By Philip J. Bergmann 0. Laboratory Objectives 1. Learn what Bayes Theorem and Bayesian Inference are 2. Reinforce the properties
Biol 206/306 Advanced Biostatistics Lab 12 Bayesian Inference Fall 2016 By Philip J. Bergmann 0. Laboratory Objectives 1. Learn what Bayes Theorem and Bayesian Inference are 2. Reinforce the properties
2. The Power Method for Eigenvectors
 2. Power Method We now describe the power method for computing the dominant eigenpair. Its extension to the inverse power method is practical for finding any eigenvalue provided that a good initial approximation
2. Power Method We now describe the power method for computing the dominant eigenpair. Its extension to the inverse power method is practical for finding any eigenvalue provided that a good initial approximation
CPSC 540: Machine Learning
 CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
Localization of Radioactive Sources Zhifei Zhang
 Localization of Radioactive Sources Zhifei Zhang 4/13/2016 1 Outline Background and motivation Our goal and scenario Preliminary knowledge Related work Our approach and results 4/13/2016 2 Background and
Localization of Radioactive Sources Zhifei Zhang 4/13/2016 1 Outline Background and motivation Our goal and scenario Preliminary knowledge Related work Our approach and results 4/13/2016 2 Background and
Quiz 1. Name: Instructions: Closed book, notes, and no electronic devices.
 Quiz 1. Name: Instructions: Closed book, notes, and no electronic devices. 1. What is the difference between a deterministic model and a probabilistic model? (Two or three sentences only). 2. What is the
Quiz 1. Name: Instructions: Closed book, notes, and no electronic devices. 1. What is the difference between a deterministic model and a probabilistic model? (Two or three sentences only). 2. What is the
Forecasting Building Occupancy Using Sensor Network Data
 Forecasting Building Occupancy Using Sensor Network Data James Howard Colorado School of Mines Department of Electrical Engineering and Computer Science Golden, CO 80401 jahoward@mines.edu ABSTRACT Forecasting
Forecasting Building Occupancy Using Sensor Network Data James Howard Colorado School of Mines Department of Electrical Engineering and Computer Science Golden, CO 80401 jahoward@mines.edu ABSTRACT Forecasting
Probability Hal Daumé III. Computer Science University of Maryland CS 421: Introduction to Artificial Intelligence 27 Mar 2012
 1 Hal Daumé III (me@hal3.name) Probability 101++ Hal Daumé III Computer Science University of Maryland me@hal3.name CS 421: Introduction to Artificial Intelligence 27 Mar 2012 Many slides courtesy of Dan
1 Hal Daumé III (me@hal3.name) Probability 101++ Hal Daumé III Computer Science University of Maryland me@hal3.name CS 421: Introduction to Artificial Intelligence 27 Mar 2012 Many slides courtesy of Dan
Lab 8: Measuring Graph Centrality - PageRank. Monday, November 5 CompSci 531, Fall 2018
 Lab 8: Measuring Graph Centrality - PageRank Monday, November 5 CompSci 531, Fall 2018 Outline Measuring Graph Centrality: Motivation Random Walks, Markov Chains, and Stationarity Distributions Google
Lab 8: Measuring Graph Centrality - PageRank Monday, November 5 CompSci 531, Fall 2018 Outline Measuring Graph Centrality: Motivation Random Walks, Markov Chains, and Stationarity Distributions Google
Methods for sparse analysis of high-dimensional data, II
 Methods for sparse analysis of high-dimensional data, II Rachel Ward May 26, 2011 High dimensional data with low-dimensional structure 300 by 300 pixel images = 90, 000 dimensions 2 / 55 High dimensional
Methods for sparse analysis of high-dimensional data, II Rachel Ward May 26, 2011 High dimensional data with low-dimensional structure 300 by 300 pixel images = 90, 000 dimensions 2 / 55 High dimensional
Artificial Intelligence Bayesian Networks
 Artificial Intelligence Bayesian Networks Stephan Dreiseitl FH Hagenberg Software Engineering & Interactive Media Stephan Dreiseitl (Hagenberg/SE/IM) Lecture 11: Bayesian Networks Artificial Intelligence
Artificial Intelligence Bayesian Networks Stephan Dreiseitl FH Hagenberg Software Engineering & Interactive Media Stephan Dreiseitl (Hagenberg/SE/IM) Lecture 11: Bayesian Networks Artificial Intelligence
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
WM 07 Conference, February 25 March 01, 2007, Tucson, AZ
 Design and Construction of a High Energy X-Ray R&D Facility, and the Development and Optimization of Real Time Radioisotopic Characterization of Remote Handled Waste at MeV Energies. S. Halliwell, V.J.Technologies
Design and Construction of a High Energy X-Ray R&D Facility, and the Development and Optimization of Real Time Radioisotopic Characterization of Remote Handled Waste at MeV Energies. S. Halliwell, V.J.Technologies
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Kyle Reing University of Southern California April 18, 2018
 Renormalization Group and Information Theory Kyle Reing University of Southern California April 18, 2018 Overview Renormalization Group Overview Information Theoretic Preliminaries Real Space Mutual Information
Renormalization Group and Information Theory Kyle Reing University of Southern California April 18, 2018 Overview Renormalization Group Overview Information Theoretic Preliminaries Real Space Mutual Information
Machine Learning for Data Science (CS4786) Lecture 24
 Lecture 24") Machine Learning for Data Science (CS4786) Lecture 24 Graphical Models: Approximate Inference Course Webpage : http://www.cs.cornell.edu/courses/cs4786/2016sp/ BELIEF PROPAGATION OR MESSAGE PASSING Each
Machine Learning for Data Science (CS4786) Lecture 24 Graphical Models: Approximate Inference Course Webpage : http://www.cs.cornell.edu/courses/cs4786/2016sp/ BELIEF PROPAGATION OR MESSAGE PASSING Each
b) (1) Using the results of part (a), let Q be the matrix with column vectors b j and A be the matrix with column vectors v j :
 (1) Using the results of part (a), let Q be the matrix with column vectors b j and A be the matrix with column vectors v j :") Exercise assignment 2 Each exercise assignment has two parts. The first part consists of 3 5 elementary problems for a maximum of 10 points from each assignment. For the second part consisting of problems
Exercise assignment 2 Each exercise assignment has two parts. The first part consists of 3 5 elementary problems for a maximum of 10 points from each assignment. For the second part consisting of problems
Estimation and Optimization: Gaps and Bridges. MURI Meeting June 20, Laurent El Ghaoui. UC Berkeley EECS
 MURI Meeting June 20, 2001 Estimation and Optimization: Gaps and Bridges Laurent El Ghaoui EECS UC Berkeley 1 goals currently, estimation (of model parameters) and optimization (of decision variables)
MURI Meeting June 20, 2001 Estimation and Optimization: Gaps and Bridges Laurent El Ghaoui EECS UC Berkeley 1 goals currently, estimation (of model parameters) and optimization (of decision variables)
Uncertainty and Randomization
 Uncertainty and Randomization The PageRank Computation in Google Roberto Tempo IEIIT-CNR Politecnico di Torino tempo@polito.it 1993: Robustness of Linear Systems 1993: Robustness of Linear Systems 16 Years
Uncertainty and Randomization The PageRank Computation in Google Roberto Tempo IEIIT-CNR Politecnico di Torino tempo@polito.it 1993: Robustness of Linear Systems 1993: Robustness of Linear Systems 16 Years
Learning in Bayesian Networks
 Learning in Bayesian Networks Florian Markowetz Max-Planck-Institute for Molecular Genetics Computational Molecular Biology Berlin Berlin: 20.06.2002 1 Overview 1. Bayesian Networks Stochastic Networks
Learning in Bayesian Networks Florian Markowetz Max-Planck-Institute for Molecular Genetics Computational Molecular Biology Berlin Berlin: 20.06.2002 1 Overview 1. Bayesian Networks Stochastic Networks
CS 781 Lecture 9 March 10, 2011 Topics: Local Search and Optimization Metropolis Algorithm Greedy Optimization Hopfield Networks Max Cut Problem Nash
 CS 781 Lecture 9 March 10, 2011 Topics: Local Search and Optimization Metropolis Algorithm Greedy Optimization Hopfield Networks Max Cut Problem Nash Equilibrium Price of Stability Coping With NP-Hardness
CS 781 Lecture 9 March 10, 2011 Topics: Local Search and Optimization Metropolis Algorithm Greedy Optimization Hopfield Networks Max Cut Problem Nash Equilibrium Price of Stability Coping With NP-Hardness
CS242: Probabilistic Graphical Models Lecture 7B: Markov Chain Monte Carlo & Gibbs Sampling
 CS242: Probabilistic Graphical Models Lecture 7B: Markov Chain Monte Carlo & Gibbs Sampling Professor Erik Sudderth Brown University Computer Science October 27, 2016 Some figures and materials courtesy
CS242: Probabilistic Graphical Models Lecture 7B: Markov Chain Monte Carlo & Gibbs Sampling Professor Erik Sudderth Brown University Computer Science October 27, 2016 Some figures and materials courtesy
Robot Mapping. Least Squares. Cyrill Stachniss
 Robot Mapping Least Squares Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for computing a solution
Robot Mapping Least Squares Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for computing a solution
A Study of the Kalman Filter applied to Visual Tracking
 A Study of the Kalman Filter applied to Visual Tracking Nathan Funk University of Alberta Project for CMPUT 652 December 7, 2003 Abstract This project analyzes the applicability of the Kalman filter as
A Study of the Kalman Filter applied to Visual Tracking Nathan Funk University of Alberta Project for CMPUT 652 December 7, 2003 Abstract This project analyzes the applicability of the Kalman filter as
Scalable robust hypothesis tests using graphical models
 Scalable robust hypothesis tests using graphical models Umamahesh Srinivas ipal Group Meeting October 22, 2010 Binary hypothesis testing problem Random vector x = (x 1,...,x n ) R n generated from either
Scalable robust hypothesis tests using graphical models Umamahesh Srinivas ipal Group Meeting October 22, 2010 Binary hypothesis testing problem Random vector x = (x 1,...,x n ) R n generated from either
Information Choice in Macroeconomics and Finance.
 Information Choice in Macroeconomics and Finance. Laura Veldkamp New York University, Stern School of Business, CEPR and NBER Spring 2009 1 Veldkamp What information consumes is rather obvious: It consumes
Information Choice in Macroeconomics and Finance. Laura Veldkamp New York University, Stern School of Business, CEPR and NBER Spring 2009 1 Veldkamp What information consumes is rather obvious: It consumes
Many natural processes can be fit to a Poisson distribution
 BE.104 Spring Biostatistics: Poisson Analyses and Power J. L. Sherley Outline 1) Poisson analyses 2) Power What is a Poisson process? Rare events Values are observational (yes or no) Random distributed
BE.104 Spring Biostatistics: Poisson Analyses and Power J. L. Sherley Outline 1) Poisson analyses 2) Power What is a Poisson process? Rare events Values are observational (yes or no) Random distributed
Introduction to Forecasting
 Introduction to Forecasting Introduction to Forecasting Predicting the future Not an exact science but instead consists of a set of statistical tools and techniques that are supported by human judgment
Introduction to Forecasting Introduction to Forecasting Predicting the future Not an exact science but instead consists of a set of statistical tools and techniques that are supported by human judgment
PREDICTING OVERHEATING RISK IN HOMES
 PREDICTING OVERHEATING RISK IN HOMES Susie Diamond Inkling Anastasia Mylona CIBSE Simulation for Health and Wellbeing 27th June 2016 - CIBSE About Inkling Building Physics Consultancy Susie Diamond Claire
PREDICTING OVERHEATING RISK IN HOMES Susie Diamond Inkling Anastasia Mylona CIBSE Simulation for Health and Wellbeing 27th June 2016 - CIBSE About Inkling Building Physics Consultancy Susie Diamond Claire
Miscellaneous. Regarding reading materials. Again, ask questions (if you have) and ask them earlier
 and ask them earlier") Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Identifying Financial Risk Factors
 Identifying Financial Risk Factors with a Low-Rank Sparse Decomposition Lisa Goldberg Alex Shkolnik Berkeley Columbia Meeting in Engineering and Statistics 24 March 2016 Outline 1 A Brief History of Factor
Identifying Financial Risk Factors with a Low-Rank Sparse Decomposition Lisa Goldberg Alex Shkolnik Berkeley Columbia Meeting in Engineering and Statistics 24 March 2016 Outline 1 A Brief History of Factor
The Kalman Filter ImPr Talk
 The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
Algorithmisches Lernen/Machine Learning
 Algorithmisches Lernen/Machine Learning Part 1: Stefan Wermter Introduction Connectionist Learning (e.g. Neural Networks) Decision-Trees, Genetic Algorithms Part 2: Norman Hendrich Support-Vector Machines
Algorithmisches Lernen/Machine Learning Part 1: Stefan Wermter Introduction Connectionist Learning (e.g. Neural Networks) Decision-Trees, Genetic Algorithms Part 2: Norman Hendrich Support-Vector Machines
Machine Learning for OR & FE
 Machine Learning for OR & FE Hidden Markov Models Martin Haugh Department of Industrial Engineering and Operations Research Columbia University Email: martin.b.haugh@gmail.com Additional References: David
Machine Learning for OR & FE Hidden Markov Models Martin Haugh Department of Industrial Engineering and Operations Research Columbia University Email: martin.b.haugh@gmail.com Additional References: David
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation. Volker Tresp Summer 2016
 Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2016 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2016 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Measurements made for web data, media (IP Radio and TV, BBC Iplayer: Port 80 TCP) and VoIP (Skype: Port UDP) traffic.
 and VoIP (Skype: Port UDP) traffic.") Real time statistical measurements of IPT(Inter-Packet time) of network traffic were done by designing and coding of efficient measurement tools based on the Libpcap package. Traditional Approach of measuring
Real time statistical measurements of IPT(Inter-Packet time) of network traffic were done by designing and coding of efficient measurement tools based on the Libpcap package. Traditional Approach of measuring
Y1 Y2 Y3 Y4 Y1 Y2 Y3 Y4 Z1 Z2 Z3 Z4
 Inference: Exploiting Local Structure aphne Koller Stanford University CS228 Handout #4 We have seen that N inference exploits the network structure, in particular the conditional independence and the
Inference: Exploiting Local Structure aphne Koller Stanford University CS228 Handout #4 We have seen that N inference exploits the network structure, in particular the conditional independence and the
Appendix: Modeling Approach
 AFFECTIVE PRIMACY IN INTRAORGANIZATIONAL TASK NETWORKS Appendix: Modeling Approach There is now a significant and developing literature on Bayesian methods in social network analysis. See, for instance,
AFFECTIVE PRIMACY IN INTRAORGANIZATIONAL TASK NETWORKS Appendix: Modeling Approach There is now a significant and developing literature on Bayesian methods in social network analysis. See, for instance,
STA 414/2104: Machine Learning
 STA 414/2104: Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistics! rsalakhu@cs.toronto.edu! http://www.cs.toronto.edu/~rsalakhu/ Lecture 9 Sequential Data So far
STA 414/2104: Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistics! rsalakhu@cs.toronto.edu! http://www.cs.toronto.edu/~rsalakhu/ Lecture 9 Sequential Data So far
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation. Volker Tresp Summer 2014
 Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2014 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2014 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science Algorithms For Inference Fall 2014
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.438 Algorithms For Inference Fall 2014 Problem Set 3 Issued: Thursday, September 25, 2014 Due: Thursday,
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.438 Algorithms For Inference Fall 2014 Problem Set 3 Issued: Thursday, September 25, 2014 Due: Thursday,
STONY BROOK UNIVERSITY. CEAS Technical Report 829
 1 STONY BROOK UNIVERSITY CEAS Technical Report 829 Variable and Multiple Target Tracking by Particle Filtering and Maximum Likelihood Monte Carlo Method Jaechan Lim January 4, 2006 2 Abstract In most applications
1 STONY BROOK UNIVERSITY CEAS Technical Report 829 Variable and Multiple Target Tracking by Particle Filtering and Maximum Likelihood Monte Carlo Method Jaechan Lim January 4, 2006 2 Abstract In most applications
Dynamic Multipath Estimation by Sequential Monte Carlo Methods
 Dynamic Multipath Estimation by Sequential Monte Carlo Methods M. Lentmaier, B. Krach, P. Robertson, and T. Thiasiriphet German Aerospace Center (DLR) Slide 1 Outline Multipath problem and signal model
Dynamic Multipath Estimation by Sequential Monte Carlo Methods M. Lentmaier, B. Krach, P. Robertson, and T. Thiasiriphet German Aerospace Center (DLR) Slide 1 Outline Multipath problem and signal model
EAS 535 Laboratory Exercise Weather Station Setup and Verification
 EAS 535 Laboratory Exercise Weather Station Setup and Verification Lab Objectives: In this lab exercise, you are going to examine and describe the error characteristics of several instruments, all purportedly
EAS 535 Laboratory Exercise Weather Station Setup and Verification Lab Objectives: In this lab exercise, you are going to examine and describe the error characteristics of several instruments, all purportedly
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter
 Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
CONDENSATION Conditional Density Propagation for Visual Tracking
 CONDENSATION Conditional Density Propagation for Visual Tracking Michael Isard and Andrew Blake Presented by Neil Alldrin Department of Computer Science & Engineering University of California, San Diego
CONDENSATION Conditional Density Propagation for Visual Tracking Michael Isard and Andrew Blake Presented by Neil Alldrin Department of Computer Science & Engineering University of California, San Diego
Simultaneous Multi-frame MAP Super-Resolution Video Enhancement using Spatio-temporal Priors
 Simultaneous Multi-frame MAP Super-Resolution Video Enhancement using Spatio-temporal Priors Sean Borman and Robert L. Stevenson Department of Electrical Engineering, University of Notre Dame Notre Dame,
Simultaneous Multi-frame MAP Super-Resolution Video Enhancement using Spatio-temporal Priors Sean Borman and Robert L. Stevenson Department of Electrical Engineering, University of Notre Dame Notre Dame,
Finite-Horizon Statistics for Markov chains
 Analyzing FSDT Markov chains Friday, September 30, 2011 2:03 PM Simulating FSDT Markov chains, as we have said is very straightforward, either by using probability transition matrix or stochastic update
Analyzing FSDT Markov chains Friday, September 30, 2011 2:03 PM Simulating FSDT Markov chains, as we have said is very straightforward, either by using probability transition matrix or stochastic update
Their Statistical Analvsis. With Web-Based Fortran Code. Berg
 Markov Chain Monter rlo Simulations and Their Statistical Analvsis With Web-Based Fortran Code Bernd A. Berg Florida State Univeisitfi USA World Scientific NEW JERSEY + LONDON " SINGAPORE " BEIJING " SHANGHAI
Markov Chain Monter rlo Simulations and Their Statistical Analvsis With Web-Based Fortran Code Bernd A. Berg Florida State Univeisitfi USA World Scientific NEW JERSEY + LONDON " SINGAPORE " BEIJING " SHANGHAI
A general algorithm to compute the steady-state solution of product-form cooperating Markov chains
 A general algorithm to compute the steady-state solution of product-form cooperating Markov chains Università Ca Foscari di Venezia Dipartimento di Informatica Italy 2009 Presentation outline 1 Product-form
A general algorithm to compute the steady-state solution of product-form cooperating Markov chains Università Ca Foscari di Venezia Dipartimento di Informatica Italy 2009 Presentation outline 1 Product-form
Information theoretic perspectives on learning algorithms
 Information theoretic perspectives on learning algorithms Varun Jog University of Wisconsin - Madison Departments of ECE and Mathematics Shannon Channel Hangout! May 8, 2018 Jointly with Adrian Tovar-Lopez
Information theoretic perspectives on learning algorithms Varun Jog University of Wisconsin - Madison Departments of ECE and Mathematics Shannon Channel Hangout! May 8, 2018 Jointly with Adrian Tovar-Lopez
Complex Social System, Elections. Introduction to Network Analysis 1
 Complex Social System, Elections Introduction to Network Analysis 1 Complex Social System, Network I person A voted for B A is more central than B if more people voted for A In-degree centrality index
Complex Social System, Elections Introduction to Network Analysis 1 Complex Social System, Network I person A voted for B A is more central than B if more people voted for A In-degree centrality index
M.Sc. (Final) DEGREE EXAMINATION, MAY Final Year. Statistics. Paper I STATISTICAL QUALITY CONTROL. Answer any FIVE questions.
 DEGREE EXAMINATION, MAY Final Year. Statistics. Paper I STATISTICAL QUALITY CONTROL. Answer any FIVE questions.") (DMSTT ) M.Sc. (Final) DEGREE EXAMINATION, MAY 0. Final Year Statistics Paper I STATISTICAL QUALITY CONTROL Time : Three hours Maximum : 00 marks Answer any FIVE questions. All questions carry equal marks..
(DMSTT ) M.Sc. (Final) DEGREE EXAMINATION, MAY 0. Final Year Statistics Paper I STATISTICAL QUALITY CONTROL Time : Three hours Maximum : 00 marks Answer any FIVE questions. All questions carry equal marks..
16 : Markov Chain Monte Carlo (MCMC)
") 10-708: Probabilistic Graphical Models 10-708, Spring 2014 16 : Markov Chain Monte Carlo MCMC Lecturer: Matthew Gormley Scribes: Yining Wang, Renato Negrinho 1 Sampling from low-dimensional distributions
10-708: Probabilistic Graphical Models 10-708, Spring 2014 16 : Markov Chain Monte Carlo MCMC Lecturer: Matthew Gormley Scribes: Yining Wang, Renato Negrinho 1 Sampling from low-dimensional distributions
Surveillance of Infectious Disease Data using Cumulative Sum Methods
 Surveillance of Infectious Disease Data using Cumulative Sum Methods 1 Michael Höhle 2 Leonhard Held 1 1 Institute of Social and Preventive Medicine University of Zurich 2 Department of Statistics University
Surveillance of Infectious Disease Data using Cumulative Sum Methods 1 Michael Höhle 2 Leonhard Held 1 1 Institute of Social and Preventive Medicine University of Zurich 2 Department of Statistics University
Nonlinear and non-gaussian state-space modelling by means of hidden Markov models
 Nonlinear and non-gaussian state-space modelling by means of hidden Markov models University of Göttingen St Andrews, 13 December 2010 bla bla bla bla 1 2 Glacial varve thickness (General) state-space
Nonlinear and non-gaussian state-space modelling by means of hidden Markov models University of Göttingen St Andrews, 13 December 2010 bla bla bla bla 1 2 Glacial varve thickness (General) state-space