Meshless Surfaces. presented by Niloy J. Mitra. An Nguyen
|
|
|
- Mercy Floyd
- 5 years ago
- Views:
Transcription
1 Meshless Surfaces presented by Nloy J. Mtra An Nguyen
2 Outlne Mesh-Independent Surface Interpolaton D. Levn
3 Outlne Mesh-Independent Surface Interpolaton D. Levn Pont Set Surfaces M. Alexa, J. Behr, D. Cohen-Or, S. Fleshman, D. Levn, and C. T. Slva Progressve Pont Set Surfaces S. Fleshman, D. Cohen-Or, M. Alexa, C. T. Slva
4 Outlne Mesh-Independent Surface Interpolaton D. Levn Pont Set Surfaces M. Alexa, J. Behr, D. Cohen-Or, S. Fleshman, D. Levn, and C. T. Slva Progressve Pont Set Surfaces S. Fleshman, D. Cohen-Or, M. Alexa, C. T. Slva Meshless Parametrzaton and Surface Reconstructon M. S. Floater, M. Remers
5 Movng Least Square (MLS) Approxmaton
6 Fttng Functons Gven: {x, f } Goal: fnd p such that {x, p(x )} mn p Π d 1 m ( p( x ) f ) 2 θ ( x ) error weght
7 Motvaton Gven: PCD R={r }
8 Motvaton Gven: PCD R={r } Goal: defne a projecton operator P(P(x))=P(x)
9 Motvaton Gven: PCD R={r } Goal: defne a projecton operator P mples a unque manfold surface S S {x P(x)=x}
10 MLS Approach Step 1: defne a local reference doman (somethng lke a local tangent plane) gves a local parameterzaton
11 MLS Approach Step 1: defne a local reference doman Step 2: construct a MLS approxmaton wrt a reference doman (a polynomal fttng step)
12 Notatons so far R={r } : nput PCD S : (d-1)-dm manfold n R d
13 Notatons R={r } : nput PCD S : (d-1)-dm manfold n R d r r : Eucldean dstance between r, r
 = exp(")
14 θ : The Weght Functon Non-negatve decayng functon Typcal example Gaussan 2 2 θ ( d) = exp( d / h )
15 Notatons so far R={r } : nput PCD S : (d-1)-dm manfold n R d r r : Eucldean dstance between r, r θ : non-negatve weght functon
16 Basc MLS Procedure For a gven pont r near R, defne a local approxmatng hyper-plane
17 Basc MLS Procedure For a gven pont r near R, defne a local approxmatng hyper-plane r
18 Basc MLS Procedure For a gven pont r near R, defne a local approxmatng hyper-plane r H r
19 Notatons so far R={r } : nput PCD S : (d-1)-dm manfold n R d r r : Eucldean dstance between r, r θ : non-negatve weght functon H r : approxmatng hyper-plane at r usng R
20 Equaton of a Lne H d d = { x < a, x > D = 0, x R }, a R, a = 1 a D x
21 Basc MLS Procedure : Step 1 For a gven pont r near R, defne a local hyper-plane H r Plane H r defned by a least square formulaton r H r
22 Basc MLS Procedure : Step 1 For a gven pont r near R, defne H r mn a, D ( < 2 a, r > D) θ ( r r ) In case of multple local mnma, the plane closest to r s chosen
23 Basc MLS Procedure : Step 1 For a gven pont r near R, defne H r mn a, D ( < 2 a, r > D) θ ( r r ) r r H r
24 Basc MLS Procedure : Step 2 H r : local approxmatng plane Fnd a polynomal approx. of degree m 2 mn ( p( x ) f d ) θ ( 1 p Π m r r r ) a f r H r x q
25 Basc MLS Procedure : Step 2 2 mn ( p( x ) f d ) θ ( 1 p Π m r r ) ~ Pm ( r) r a H r f x q r p(0)
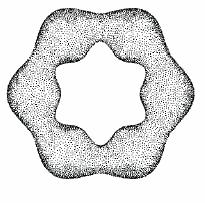
26 Basc MLS : Curve Smoothng Step 1 Step 2
27 But t s not a projecton ~ P m ~ ( P m ( r)) ~ P m ( r) Remember, θ ( r r ) r a f r H r x q
28 Problems wth ~ P m ( r) ~ P m ~ ( P m ( r)) ~ P m ( r) Basc MLS n d R Doesn t project ponts to a (d-1)-dm manfold Doesn t defne a surface
29 A Smple Fx Replace ( r r ) by θ θ ( r q ) r a f r H r x q
30 MLS Procedure : Step 1 For a gven pont r near R, defne H r mn a, D ( < 2 a, r > D) θ ( r q ) r a f r H r x q
31 MLS Projecton : Step 2 Gven a local parameterzaton, H r 2 mn ( p( x ) f d ) θ ( 1 p Π m r q ) r P m (r) a H r f x q r p(0)
32 Why does t work? θ ( r q ) r on H r depends on the projecton of r a f r H r x q
33 Why does t work? θ ( r q ) depends on the projecton of r on H r mn a, D 2 ( < a, r > D) θ ( r q ) r a f r H r x q
34 MLS defnes (d-1)-dm manfold P m (P m (x))=p m (x) Implct surface defnton S { x Pm ( x) = x} Conjecture: S nfntely smooth f θ C
35 MLS defnes Curve/Surface
36 Computng H r and p(.) Computng hyper-plane H r Non-lnear optmzaton problem Computed teratvely Computng θ (.) : tme consumng step O(N) for each teraton step Approxmate by dong a herarchcal clusterng Fttng a polynomal p(.), gven H r Solve a lnear system Sze depends on the order of approxmaton (m)
 small h")
37 Weght Functon θ θ ( d) = exp( d 2 / h 2 ) small h large h



38 Samplng Condton?

39 Smplfcaton More smplfcaton algorthms/results on Nov. 19

40 Up-samplng ,000

41 Renderng Q-Splat Rusnkewcz et al., Sggraph 2000 herarchcal pont renderng based on Boundng Sphere Herarchy

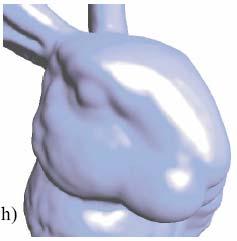
42 Renderng Results
43 Progressve Pont Surface Extenson of progressve mesh Start wth base doman P 0 Add ponts mplctly to get P 1 Predct postons and transmt error ( ) Repeat
44 Progressve Pont Surface Gven pont set R={r } Start wth base pont set P 0 Get ths by clusterng method (Nov. 19)
45 Progressve Pont Surface Gven pont set R={r } Start wth base pont set P 0 Get ths by clusterng method (Nov. 19) repeat Refne P to get P +1
46 Progressve Pont Surface Gven pont set R={r } Start wth base pont set P 0 Get ths by clusterng method (Nov. 19) repeat Refne P to get P +1 Dsplace new ponts s.t. d( SP, S ) (, ) 1 R d SP SR < +
47 Refnng P p p
48 Computng a p p a r p Transmt P o, { 1 }, { 2 }, { 3 }, Do nverse process to reconstruct

49 Results
50 Conclusons MLS: Projecton-based surface defnton Surface s smooth and a manfold Surface may be bounded Representaton error depends on pont densty Adjustable feature sze h allows to smooth out nose
51 Adaptve MLS
Affine and Riemannian Connections
 Affne and Remannan Connectons Semnar Remannan Geometry Summer Term 2015 Prof Dr Anna Wenhard and Dr Gye-Seon Lee Jakob Ullmann Notaton: X(M) space of smooth vector felds on M D(M) space of smooth functons
Affne and Remannan Connectons Semnar Remannan Geometry Summer Term 2015 Prof Dr Anna Wenhard and Dr Gye-Seon Lee Jakob Ullmann Notaton: X(M) space of smooth vector felds on M D(M) space of smooth functons
Errors for Linear Systems
 Errors for Lnear Systems When we solve a lnear system Ax b we often do not know A and b exactly, but have only approxmatons  and ˆb avalable. Then the best thng we can do s to solve ˆx ˆb exactly whch
Errors for Lnear Systems When we solve a lnear system Ax b we often do not know A and b exactly, but have only approxmatons  and ˆb avalable. Then the best thng we can do s to solve ˆx ˆb exactly whch
Lecture 10 Support Vector Machines. Oct
 Lecture 10 Support Vector Machnes Oct - 20-2008 Lnear Separators Whch of the lnear separators s optmal? Concept of Margn Recall that n Perceptron, we learned that the convergence rate of the Perceptron
Lecture 10 Support Vector Machnes Oct - 20-2008 Lnear Separators Whch of the lnear separators s optmal? Concept of Margn Recall that n Perceptron, we learned that the convergence rate of the Perceptron
Geometric Registration for Deformable Shapes. 2.1 ICP + Tangent Space optimization for Rigid Motions
 Geometrc Regstraton for Deformable Shapes 2.1 ICP + Tangent Space optmzaton for Rgd Motons Regstraton Problem Gven Two pont cloud data sets P (model) and Q (data) sampled from surfaces Φ P and Φ Q respectvely.
Geometrc Regstraton for Deformable Shapes 2.1 ICP + Tangent Space optmzaton for Rgd Motons Regstraton Problem Gven Two pont cloud data sets P (model) and Q (data) sampled from surfaces Φ P and Φ Q respectvely.
MACHINE APPLIED MACHINE LEARNING LEARNING. Gaussian Mixture Regression
 11 MACHINE APPLIED MACHINE LEARNING LEARNING MACHINE LEARNING Gaussan Mture Regresson 22 MACHINE APPLIED MACHINE LEARNING LEARNING Bref summary of last week s lecture 33 MACHINE APPLIED MACHINE LEARNING
11 MACHINE APPLIED MACHINE LEARNING LEARNING MACHINE LEARNING Gaussan Mture Regresson 22 MACHINE APPLIED MACHINE LEARNING LEARNING Bref summary of last week s lecture 33 MACHINE APPLIED MACHINE LEARNING
IV. Performance Optimization
 IV. Performance Optmzaton A. Steepest descent algorthm defnton how to set up bounds on learnng rate mnmzaton n a lne (varyng learnng rate) momentum learnng examples B. Newton s method defnton Gauss-Newton
IV. Performance Optmzaton A. Steepest descent algorthm defnton how to set up bounds on learnng rate mnmzaton n a lne (varyng learnng rate) momentum learnng examples B. Newton s method defnton Gauss-Newton
Bezier curves. Michael S. Floater. August 25, These notes provide an introduction to Bezier curves. i=0
 Bezer curves Mchael S. Floater August 25, 211 These notes provde an ntroducton to Bezer curves. 1 Bernsten polynomals Recall that a real polynomal of a real varable x R, wth degree n, s a functon of the
Bezer curves Mchael S. Floater August 25, 211 These notes provde an ntroducton to Bezer curves. 1 Bernsten polynomals Recall that a real polynomal of a real varable x R, wth degree n, s a functon of the
Lecture Notes on Linear Regression
 Lecture Notes on Lnear Regresson Feng L fl@sdueducn Shandong Unversty, Chna Lnear Regresson Problem In regresson problem, we am at predct a contnuous target value gven an nput feature vector We assume
Lecture Notes on Lnear Regresson Feng L fl@sdueducn Shandong Unversty, Chna Lnear Regresson Problem In regresson problem, we am at predct a contnuous target value gven an nput feature vector We assume
Support Vector Machines. Vibhav Gogate The University of Texas at dallas
 Support Vector Machnes Vbhav Gogate he Unversty of exas at dallas What We have Learned So Far? 1. Decson rees. Naïve Bayes 3. Lnear Regresson 4. Logstc Regresson 5. Perceptron 6. Neural networks 7. K-Nearest
Support Vector Machnes Vbhav Gogate he Unversty of exas at dallas What We have Learned So Far? 1. Decson rees. Naïve Bayes 3. Lnear Regresson 4. Logstc Regresson 5. Perceptron 6. Neural networks 7. K-Nearest
Lectures - Week 4 Matrix norms, Conditioning, Vector Spaces, Linear Independence, Spanning sets and Basis, Null space and Range of a Matrix
 Lectures - Week 4 Matrx norms, Condtonng, Vector Spaces, Lnear Independence, Spannng sets and Bass, Null space and Range of a Matrx Matrx Norms Now we turn to assocatng a number to each matrx. We could
Lectures - Week 4 Matrx norms, Condtonng, Vector Spaces, Lnear Independence, Spannng sets and Bass, Null space and Range of a Matrx Matrx Norms Now we turn to assocatng a number to each matrx. We could
15-381: Artificial Intelligence. Regression and cross validation
 15-381: Artfcal Intellgence Regresson and cross valdaton Where e are Inputs Densty Estmator Probablty Inputs Classfer Predct category Inputs Regressor Predct real no. Today Lnear regresson Gven an nput
15-381: Artfcal Intellgence Regresson and cross valdaton Where e are Inputs Densty Estmator Probablty Inputs Classfer Predct category Inputs Regressor Predct real no. Today Lnear regresson Gven an nput
K means B d ase Consensus Cluste i r ng Dr. Dr Junjie Wu Beihang University
 K means Based dconsensus Clusterng Dr. Junje Wu Dr. Junje Wu Behang Unversty Outlne Motvatons Pont to Centrod to Dstance Utlty Functons for KCC Expermental Results Concludng remarks Cluster Analyss Clusterng
K means Based dconsensus Clusterng Dr. Junje Wu Dr. Junje Wu Behang Unversty Outlne Motvatons Pont to Centrod to Dstance Utlty Functons for KCC Expermental Results Concludng remarks Cluster Analyss Clusterng
Support Vector Machines
 Separatng boundary, defned by w Support Vector Machnes CISC 5800 Professor Danel Leeds Separatng hyperplane splts class 0 and class 1 Plane s defned by lne w perpendcular to plan Is data pont x n class
Separatng boundary, defned by w Support Vector Machnes CISC 5800 Professor Danel Leeds Separatng hyperplane splts class 0 and class 1 Plane s defned by lne w perpendcular to plan Is data pont x n class
Lecture 21: Numerical methods for pricing American type derivatives
 Lecture 21: Numercal methods for prcng Amercan type dervatves Xaoguang Wang STAT 598W Aprl 10th, 2014 (STAT 598W) Lecture 21 1 / 26 Outlne 1 Fnte Dfference Method Explct Method Penalty Method (STAT 598W)
Lecture 21: Numercal methods for prcng Amercan type dervatves Xaoguang Wang STAT 598W Aprl 10th, 2014 (STAT 598W) Lecture 21 1 / 26 Outlne 1 Fnte Dfference Method Explct Method Penalty Method (STAT 598W)
Support Vector Machines
 /14/018 Separatng boundary, defned by w Support Vector Machnes CISC 5800 Professor Danel Leeds Separatng hyperplane splts class 0 and class 1 Plane s defned by lne w perpendcular to plan Is data pont x
/14/018 Separatng boundary, defned by w Support Vector Machnes CISC 5800 Professor Danel Leeds Separatng hyperplane splts class 0 and class 1 Plane s defned by lne w perpendcular to plan Is data pont x
Body Models I-2. Gerard Pons-Moll and Bernt Schiele Max Planck Institute for Informatics
 Body Models I-2 Gerard Pons-Moll and Bernt Schele Max Planck Insttute for Informatcs December 18, 2017 What s mssng Gven correspondences, we can fnd the optmal rgd algnment wth Procrustes. PROBLEMS: How
Body Models I-2 Gerard Pons-Moll and Bernt Schele Max Planck Insttute for Informatcs December 18, 2017 What s mssng Gven correspondences, we can fnd the optmal rgd algnment wth Procrustes. PROBLEMS: How
EM and Structure Learning
 EM and Structure Learnng Le Song Machne Learnng II: Advanced Topcs CSE 8803ML, Sprng 2012 Partally observed graphcal models Mxture Models N(μ 1, Σ 1 ) Z X N N(μ 2, Σ 2 ) 2 Gaussan mxture model Consder
EM and Structure Learnng Le Song Machne Learnng II: Advanced Topcs CSE 8803ML, Sprng 2012 Partally observed graphcal models Mxture Models N(μ 1, Σ 1 ) Z X N N(μ 2, Σ 2 ) 2 Gaussan mxture model Consder
Generalized Linear Methods
 Generalzed Lnear Methods 1 Introducton In the Ensemble Methods the general dea s that usng a combnaton of several weak learner one could make a better learner. More formally, assume that we have a set
Generalzed Lnear Methods 1 Introducton In the Ensemble Methods the general dea s that usng a combnaton of several weak learner one could make a better learner. More formally, assume that we have a set
Linear Classification, SVMs and Nearest Neighbors
 1 CSE 473 Lecture 25 (Chapter 18) Lnear Classfcaton, SVMs and Nearest Neghbors CSE AI faculty + Chrs Bshop, Dan Klen, Stuart Russell, Andrew Moore Motvaton: Face Detecton How do we buld a classfer to dstngush
1 CSE 473 Lecture 25 (Chapter 18) Lnear Classfcaton, SVMs and Nearest Neghbors CSE AI faculty + Chrs Bshop, Dan Klen, Stuart Russell, Andrew Moore Motvaton: Face Detecton How do we buld a classfer to dstngush
Multilayer Perceptron (MLP)
") Multlayer Perceptron (MLP) Seungjn Cho Department of Computer Scence and Engneerng Pohang Unversty of Scence and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjn@postech.ac.kr 1 / 20 Outlne
Multlayer Perceptron (MLP) Seungjn Cho Department of Computer Scence and Engneerng Pohang Unversty of Scence and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjn@postech.ac.kr 1 / 20 Outlne
Linear Regression Analysis: Terminology and Notation
 ECON 35* -- Secton : Basc Concepts of Regresson Analyss (Page ) Lnear Regresson Analyss: Termnology and Notaton Consder the generc verson of the smple (two-varable) lnear regresson model. It s represented
ECON 35* -- Secton : Basc Concepts of Regresson Analyss (Page ) Lnear Regresson Analyss: Termnology and Notaton Consder the generc verson of the smple (two-varable) lnear regresson model. It s represented
Adaptive Manifold Learning
 Adaptve Manfold Learnng Jng Wang, Zhenyue Zhang Department of Mathematcs Zhejang Unversty, Yuquan Campus, Hangzhou, 327, P. R. Chna wroarng@sohu.com zyzhang@zju.edu.cn Hongyuan Zha Department of Computer
Adaptve Manfold Learnng Jng Wang, Zhenyue Zhang Department of Mathematcs Zhejang Unversty, Yuquan Campus, Hangzhou, 327, P. R. Chna wroarng@sohu.com zyzhang@zju.edu.cn Hongyuan Zha Department of Computer
Report on Image warping
 Report on Image warpng Xuan Ne, Dec. 20, 2004 Ths document summarzed the algorthms of our mage warpng soluton for further study, and there s a detaled descrpton about the mplementaton of these algorthms.
Report on Image warpng Xuan Ne, Dec. 20, 2004 Ths document summarzed the algorthms of our mage warpng soluton for further study, and there s a detaled descrpton about the mplementaton of these algorthms.
n α j x j = 0 j=1 has a nontrivial solution. Here A is the n k matrix whose jth column is the vector for all t j=0
 MODULE 2 Topcs: Lnear ndependence, bass and dmenson We have seen that f n a set of vectors one vector s a lnear combnaton of the remanng vectors n the set then the span of the set s unchanged f that vector
MODULE 2 Topcs: Lnear ndependence, bass and dmenson We have seen that f n a set of vectors one vector s a lnear combnaton of the remanng vectors n the set then the span of the set s unchanged f that vector
p 1 c 2 + p 2 c 2 + p 3 c p m c 2
 Where to put a faclty? Gven locatons p 1,..., p m n R n of m houses, want to choose a locaton c n R n for the fre staton. Want c to be as close as possble to all the house. We know how to measure dstance
Where to put a faclty? Gven locatons p 1,..., p m n R n of m houses, want to choose a locaton c n R n for the fre staton. Want c to be as close as possble to all the house. We know how to measure dstance
APPENDIX A Some Linear Algebra
 APPENDIX A Some Lnear Algebra The collecton of m, n matrces A.1 Matrces a 1,1,..., a 1,n A = a m,1,..., a m,n wth real elements a,j s denoted by R m,n. If n = 1 then A s called a column vector. Smlarly,
APPENDIX A Some Lnear Algebra The collecton of m, n matrces A.1 Matrces a 1,1,..., a 1,n A = a m,1,..., a m,n wth real elements a,j s denoted by R m,n. If n = 1 then A s called a column vector. Smlarly,
VQ widely used in coding speech, image, and video
 at Scalar quantzers are specal cases of vector quantzers (VQ): they are constraned to look at one sample at a tme (memoryless) VQ does not have such constrant better RD perfomance expected Source codng
at Scalar quantzers are specal cases of vector quantzers (VQ): they are constraned to look at one sample at a tme (memoryless) VQ does not have such constrant better RD perfomance expected Source codng
Modeling curves. Graphs: y = ax+b, y = sin(x) Implicit ax + by + c = 0, x 2 +y 2 =r 2 Parametric:
 Implicit ax + by + c = 0, x 2 +y 2 =r 2 Parametric:") Modelng curves Types of Curves Graphs: y = ax+b, y = sn(x) Implct ax + by + c = 0, x 2 +y 2 =r 2 Parametrc: x = ax + bxt x = cos t y = ay + byt y = snt Parametrc are the most common mplct are also used,
Modelng curves Types of Curves Graphs: y = ax+b, y = sn(x) Implct ax + by + c = 0, x 2 +y 2 =r 2 Parametrc: x = ax + bxt x = cos t y = ay + byt y = snt Parametrc are the most common mplct are also used,
Bootstrap AMG for Markov Chain Computations
 Bootstrap AMG for Markov Chan Computatons Karsten Kahl Bergsche Unverstät Wuppertal May 27, 200 Outlne Markov Chans Subspace Egenvalue Approxmaton Ingredents of Least Squares Interpolaton Egensolver Bootstrap
Bootstrap AMG for Markov Chan Computatons Karsten Kahl Bergsche Unverstät Wuppertal May 27, 200 Outlne Markov Chans Subspace Egenvalue Approxmaton Ingredents of Least Squares Interpolaton Egensolver Bootstrap
2.29 Numerical Fluid Mechanics Fall 2011 Lecture 12
 REVIEW Lecture 11: 2.29 Numercal Flud Mechancs Fall 2011 Lecture 12 End of (Lnear) Algebrac Systems Gradent Methods Krylov Subspace Methods Precondtonng of Ax=b FINITE DIFFERENCES Classfcaton of Partal
REVIEW Lecture 11: 2.29 Numercal Flud Mechancs Fall 2011 Lecture 12 End of (Lnear) Algebrac Systems Gradent Methods Krylov Subspace Methods Precondtonng of Ax=b FINITE DIFFERENCES Classfcaton of Partal
Clustering gene expression data & the EM algorithm
 CG, Fall 2011-12 Clusterng gene expresson data & the EM algorthm CG 08 Ron Shamr 1 How Gene Expresson Data Looks Entres of the Raw Data matrx: Rato values Absolute values Row = gene s expresson pattern
CG, Fall 2011-12 Clusterng gene expresson data & the EM algorthm CG 08 Ron Shamr 1 How Gene Expresson Data Looks Entres of the Raw Data matrx: Rato values Absolute values Row = gene s expresson pattern
Efficient, General Point Cloud Registration with Kernel Feature Maps
 Effcent, General Pont Cloud Regstraton wth Kernel Feature Maps Hanchen Xong, Sandor Szedmak, Justus Pater Insttute of Computer Scence Unversty of Innsbruck 30 May 2013 Hanchen Xong (Un.Innsbruck) 3D Regstraton
Effcent, General Pont Cloud Regstraton wth Kernel Feature Maps Hanchen Xong, Sandor Szedmak, Justus Pater Insttute of Computer Scence Unversty of Innsbruck 30 May 2013 Hanchen Xong (Un.Innsbruck) 3D Regstraton
Error Bars in both X and Y
 Error Bars n both X and Y Wrong ways to ft a lne : 1. y(x) a x +b (σ x 0). x(y) c y + d (σ y 0) 3. splt dfference between 1 and. Example: Prmordal He abundance: Extrapolate ft lne to [ O / H ] 0. [ He
Error Bars n both X and Y Wrong ways to ft a lne : 1. y(x) a x +b (σ x 0). x(y) c y + d (σ y 0) 3. splt dfference between 1 and. Example: Prmordal He abundance: Extrapolate ft lne to [ O / H ] 0. [ He
U.C. Berkeley CS294: Beyond Worst-Case Analysis Luca Trevisan September 5, 2017
 U.C. Berkeley CS94: Beyond Worst-Case Analyss Handout 4s Luca Trevsan September 5, 07 Summary of Lecture 4 In whch we ntroduce semdefnte programmng and apply t to Max Cut. Semdefnte Programmng Recall that
U.C. Berkeley CS94: Beyond Worst-Case Analyss Handout 4s Luca Trevsan September 5, 07 Summary of Lecture 4 In whch we ntroduce semdefnte programmng and apply t to Max Cut. Semdefnte Programmng Recall that
Pattern Classification
 Pattern Classfcaton All materals n these sldes ere taken from Pattern Classfcaton (nd ed) by R. O. Duda, P. E. Hart and D. G. Stork, John Wley & Sons, 000 th the permsson of the authors and the publsher
Pattern Classfcaton All materals n these sldes ere taken from Pattern Classfcaton (nd ed) by R. O. Duda, P. E. Hart and D. G. Stork, John Wley & Sons, 000 th the permsson of the authors and the publsher
Norms, Condition Numbers, Eigenvalues and Eigenvectors
 Norms, Condton Numbers, Egenvalues and Egenvectors 1 Norms A norm s a measure of the sze of a matrx or a vector For vectors the common norms are: N a 2 = ( x 2 1/2 the Eucldean Norm (1a b 1 = =1 N x (1b
Norms, Condton Numbers, Egenvalues and Egenvectors 1 Norms A norm s a measure of the sze of a matrx or a vector For vectors the common norms are: N a 2 = ( x 2 1/2 the Eucldean Norm (1a b 1 = =1 N x (1b
β0 + β1xi. You are interested in estimating the unknown parameters β
 Ordnary Least Squares (OLS): Smple Lnear Regresson (SLR) Analytcs The SLR Setup Sample Statstcs Ordnary Least Squares (OLS): FOCs and SOCs Back to OLS and Sample Statstcs Predctons (and Resduals) wth OLS
Ordnary Least Squares (OLS): Smple Lnear Regresson (SLR) Analytcs The SLR Setup Sample Statstcs Ordnary Least Squares (OLS): FOCs and SOCs Back to OLS and Sample Statstcs Predctons (and Resduals) wth OLS
Which Separator? Spring 1
 Whch Separator? 6.034 - Sprng 1 Whch Separator? Mamze the margn to closest ponts 6.034 - Sprng Whch Separator? Mamze the margn to closest ponts 6.034 - Sprng 3 Margn of a pont " # y (w $ + b) proportonal
Whch Separator? 6.034 - Sprng 1 Whch Separator? Mamze the margn to closest ponts 6.034 - Sprng Whch Separator? Mamze the margn to closest ponts 6.034 - Sprng 3 Margn of a pont " # y (w $ + b) proportonal
Lecture 10 Support Vector Machines II
 Lecture 10 Support Vector Machnes II 22 February 2016 Taylor B. Arnold Yale Statstcs STAT 365/665 1/28 Notes: Problem 3 s posted and due ths upcomng Frday There was an early bug n the fake-test data; fxed
Lecture 10 Support Vector Machnes II 22 February 2016 Taylor B. Arnold Yale Statstcs STAT 365/665 1/28 Notes: Problem 3 s posted and due ths upcomng Frday There was an early bug n the fake-test data; fxed
NUMERICAL DIFFERENTIATION
 NUMERICAL DIFFERENTIATION 1 Introducton Dfferentaton s a method to compute the rate at whch a dependent output y changes wth respect to the change n the ndependent nput x. Ths rate of change s called the
NUMERICAL DIFFERENTIATION 1 Introducton Dfferentaton s a method to compute the rate at whch a dependent output y changes wth respect to the change n the ndependent nput x. Ths rate of change s called the
First Law: A body at rest remains at rest, a body in motion continues to move at constant velocity, unless acted upon by an external force.
 Secton 1. Dynamcs (Newton s Laws of Moton) Two approaches: 1) Gven all the forces actng on a body, predct the subsequent (changes n) moton. 2) Gven the (changes n) moton of a body, nfer what forces act
Secton 1. Dynamcs (Newton s Laws of Moton) Two approaches: 1) Gven all the forces actng on a body, predct the subsequent (changes n) moton. 2) Gven the (changes n) moton of a body, nfer what forces act
MATH 241B FUNCTIONAL ANALYSIS - NOTES EXAMPLES OF C ALGEBRAS
 MATH 241B FUNCTIONAL ANALYSIS - NOTES EXAMPLES OF C ALGEBRAS These are nformal notes whch cover some of the materal whch s not n the course book. The man purpose s to gve a number of nontrval examples
MATH 241B FUNCTIONAL ANALYSIS - NOTES EXAMPLES OF C ALGEBRAS These are nformal notes whch cover some of the materal whch s not n the course book. The man purpose s to gve a number of nontrval examples
Bézier curves. Michael S. Floater. September 10, These notes provide an introduction to Bézier curves. i=0
 Bézer curves Mchael S. Floater September 1, 215 These notes provde an ntroducton to Bézer curves. 1 Bernsten polynomals Recall that a real polynomal of a real varable x R, wth degree n, s a functon of
Bézer curves Mchael S. Floater September 1, 215 These notes provde an ntroducton to Bézer curves. 1 Bernsten polynomals Recall that a real polynomal of a real varable x R, wth degree n, s a functon of
Math1110 (Spring 2009) Prelim 3 - Solutions
 Prelim 3 - Solutions") Math 1110 (Sprng 2009) Solutons to Prelm 3 (04/21/2009) 1 Queston 1. (16 ponts) Short answer. Math1110 (Sprng 2009) Prelm 3 - Solutons x a 1 (a) (4 ponts) Please evaluate lm, where a and b are postve numbers.
Math 1110 (Sprng 2009) Solutons to Prelm 3 (04/21/2009) 1 Queston 1. (16 ponts) Short answer. Math1110 (Sprng 2009) Prelm 3 - Solutons x a 1 (a) (4 ponts) Please evaluate lm, where a and b are postve numbers.
6) Derivatives, gradients and Hessian matrices
 Derivatives, gradients and Hessian matrices") 30C00300 Mathematcal Methods for Economsts (6 cr) 6) Dervatves, gradents and Hessan matrces Smon & Blume chapters: 14, 15 Sldes by: Tmo Kuosmanen 1 Outlne Defnton of dervatve functon Dervatve notatons
30C00300 Mathematcal Methods for Economsts (6 cr) 6) Dervatves, gradents and Hessan matrces Smon & Blume chapters: 14, 15 Sldes by: Tmo Kuosmanen 1 Outlne Defnton of dervatve functon Dervatve notatons
C4B Machine Learning Answers II. = σ(z) (1 σ(z)) 1 1 e z. e z = σ(1 σ) (1 + e z )
 (1 σ(z)) 1 1 e z. e z = σ(1 σ) (1 + e z )") C4B Machne Learnng Answers II.(a) Show that for the logstc sgmod functon dσ(z) dz = σ(z) ( σ(z)) A. Zsserman, Hlary Term 20 Start from the defnton of σ(z) Note that Then σ(z) = σ = dσ(z) dz = + e z e z
C4B Machne Learnng Answers II.(a) Show that for the logstc sgmod functon dσ(z) dz = σ(z) ( σ(z)) A. Zsserman, Hlary Term 20 Start from the defnton of σ(z) Note that Then σ(z) = σ = dσ(z) dz = + e z e z
Inexact Newton Methods for Inverse Eigenvalue Problems
 Inexact Newton Methods for Inverse Egenvalue Problems Zheng-jan Ba Abstract In ths paper, we survey some of the latest development n usng nexact Newton-lke methods for solvng nverse egenvalue problems.
Inexact Newton Methods for Inverse Egenvalue Problems Zheng-jan Ba Abstract In ths paper, we survey some of the latest development n usng nexact Newton-lke methods for solvng nverse egenvalue problems.
Outline. Multivariate Parametric Methods. Multivariate Data. Basic Multivariate Statistics. Steven J Zeil
 Outlne Multvarate Parametrc Methods Steven J Zel Old Domnon Unv. Fall 2010 1 Multvarate Data 2 Multvarate ormal Dstrbuton 3 Multvarate Classfcaton Dscrmnants Tunng Complexty Dscrete Features 4 Multvarate
Outlne Multvarate Parametrc Methods Steven J Zel Old Domnon Unv. Fall 2010 1 Multvarate Data 2 Multvarate ormal Dstrbuton 3 Multvarate Classfcaton Dscrmnants Tunng Complexty Dscrete Features 4 Multvarate
Radar Trackers. Study Guide. All chapters, problems, examples and page numbers refer to Applied Optimal Estimation, A. Gelb, Ed.
 Radar rackers Study Gude All chapters, problems, examples and page numbers refer to Appled Optmal Estmaton, A. Gelb, Ed. Chapter Example.0- Problem Statement wo sensors Each has a sngle nose measurement
Radar rackers Study Gude All chapters, problems, examples and page numbers refer to Appled Optmal Estmaton, A. Gelb, Ed. Chapter Example.0- Problem Statement wo sensors Each has a sngle nose measurement
CSE4210 Architecture and Hardware for DSP
 4210 Archtecture and Hardware for DSP Lecture 1 Introducton & Number systems Admnstratve Stuff 4210 Archtecture and Hardware for DSP Text: VLSI Dgtal Sgnal Processng Systems: Desgn and Implementaton. K.
4210 Archtecture and Hardware for DSP Lecture 1 Introducton & Number systems Admnstratve Stuff 4210 Archtecture and Hardware for DSP Text: VLSI Dgtal Sgnal Processng Systems: Desgn and Implementaton. K.
Chapter 5. Solution of System of Linear Equations. Module No. 6. Solution of Inconsistent and Ill Conditioned Systems
 Numercal Analyss by Dr. Anta Pal Assstant Professor Department of Mathematcs Natonal Insttute of Technology Durgapur Durgapur-713209 emal: anta.bue@gmal.com 1 . Chapter 5 Soluton of System of Lnear Equatons
Numercal Analyss by Dr. Anta Pal Assstant Professor Department of Mathematcs Natonal Insttute of Technology Durgapur Durgapur-713209 emal: anta.bue@gmal.com 1 . Chapter 5 Soluton of System of Lnear Equatons
Statistical pattern recognition
 Statstcal pattern recognton Bayes theorem Problem: decdng f a patent has a partcular condton based on a partcular test However, the test s mperfect Someone wth the condton may go undetected (false negatve
Statstcal pattern recognton Bayes theorem Problem: decdng f a patent has a partcular condton based on a partcular test However, the test s mperfect Someone wth the condton may go undetected (false negatve
Lecture 2: Gram-Schmidt Vectors and the LLL Algorithm
 NYU, Fall 2016 Lattces Mn Course Lecture 2: Gram-Schmdt Vectors and the LLL Algorthm Lecturer: Noah Stephens-Davdowtz 2.1 The Shortest Vector Problem In our last lecture, we consdered short solutons to
NYU, Fall 2016 Lattces Mn Course Lecture 2: Gram-Schmdt Vectors and the LLL Algorthm Lecturer: Noah Stephens-Davdowtz 2.1 The Shortest Vector Problem In our last lecture, we consdered short solutons to
Image classification. Given the bag-of-features representations of images from different classes, how do we learn a model for distinguishing i them?
 Image classfcaton Gven te bag-of-features representatons of mages from dfferent classes ow do we learn a model for dstngusng tem? Classfers Learn a decson rule assgnng bag-offeatures representatons of
Image classfcaton Gven te bag-of-features representatons of mages from dfferent classes ow do we learn a model for dstngusng tem? Classfers Learn a decson rule assgnng bag-offeatures representatons of
Least squares cubic splines without B-splines S.K. Lucas
 Least squares cubc splnes wthout B-splnes S.K. Lucas School of Mathematcs and Statstcs, Unversty of South Australa, Mawson Lakes SA 595 e-mal: stephen.lucas@unsa.edu.au Submtted to the Gazette of the Australan
Least squares cubc splnes wthout B-splnes S.K. Lucas School of Mathematcs and Statstcs, Unversty of South Australa, Mawson Lakes SA 595 e-mal: stephen.lucas@unsa.edu.au Submtted to the Gazette of the Australan
π e ax2 dx = x 2 e ax2 dx or x 3 e ax2 dx = 1 x 4 e ax2 dx = 3 π 8a 5/2 (a) We are considering the Maxwell velocity distribution function: 2πτ/m
 We are considering the Maxwell velocity distribution function: 2πτ/m") Homework Solutons Problem In solvng ths problem, we wll need to calculate some moments of the Gaussan dstrbuton. The brute-force method s to ntegrate by parts but there s a nce trck. The followng ntegrals
Homework Solutons Problem In solvng ths problem, we wll need to calculate some moments of the Gaussan dstrbuton. The brute-force method s to ntegrate by parts but there s a nce trck. The followng ntegrals
Review: Fit a line to N data points
 Revew: Ft a lne to data ponts Correlated parameters: L y = a x + b Orthogonal parameters: J y = a (x ˆ x + b For ntercept b, set a=0 and fnd b by optmal average: ˆ b = y, Var[ b ˆ ] = For slope a, set
Revew: Ft a lne to data ponts Correlated parameters: L y = a x + b Orthogonal parameters: J y = a (x ˆ x + b For ntercept b, set a=0 and fnd b by optmal average: ˆ b = y, Var[ b ˆ ] = For slope a, set
Lecture 12: Discrete Laplacian
 Lecture 12: Dscrete Laplacan Scrbe: Tanye Lu Our goal s to come up wth a dscrete verson of Laplacan operator for trangulated surfaces, so that we can use t n practce to solve related problems We are mostly
Lecture 12: Dscrete Laplacan Scrbe: Tanye Lu Our goal s to come up wth a dscrete verson of Laplacan operator for trangulated surfaces, so that we can use t n practce to solve related problems We are mostly
Linear Approximation with Regularization and Moving Least Squares
 Lnear Approxmaton wth Regularzaton and Movng Least Squares Igor Grešovn May 007 Revson 4.6 (Revson : March 004). 5 4 3 0.5 3 3.5 4 Contents: Lnear Fttng...4. Weghted Least Squares n Functon Approxmaton...
Lnear Approxmaton wth Regularzaton and Movng Least Squares Igor Grešovn May 007 Revson 4.6 (Revson : March 004). 5 4 3 0.5 3 3.5 4 Contents: Lnear Fttng...4. Weghted Least Squares n Functon Approxmaton...
Maximum Likelihood Estimation (MLE)
") Maxmum Lkelhood Estmaton (MLE) Ken Kreutz-Delgado (Nuno Vasconcelos) ECE 175A Wnter 01 UCSD Statstcal Learnng Goal: Gven a relatonshp between a feature vector x and a vector y, and d data samples (x,y
Maxmum Lkelhood Estmaton (MLE) Ken Kreutz-Delgado (Nuno Vasconcelos) ECE 175A Wnter 01 UCSD Statstcal Learnng Goal: Gven a relatonshp between a feature vector x and a vector y, and d data samples (x,y
CS 3710: Visual Recognition Classification and Detection. Adriana Kovashka Department of Computer Science January 13, 2015
 CS 3710: Vsual Recognton Classfcaton and Detecton Adrana Kovashka Department of Computer Scence January 13, 2015 Plan for Today Vsual recognton bascs part 2: Classfcaton and detecton Adrana s research
CS 3710: Vsual Recognton Classfcaton and Detecton Adrana Kovashka Department of Computer Scence January 13, 2015 Plan for Today Vsual recognton bascs part 2: Classfcaton and detecton Adrana s research
Implicit Integration Henyey Method
 Implct Integraton Henyey Method In realstc stellar evoluton codes nstead of a drect ntegraton usng for example the Runge-Kutta method one employs an teratve mplct technque. Ths s because the structure
Implct Integraton Henyey Method In realstc stellar evoluton codes nstead of a drect ntegraton usng for example the Runge-Kutta method one employs an teratve mplct technque. Ths s because the structure
Section 8.3 Polar Form of Complex Numbers
 80 Chapter 8 Secton 8 Polar Form of Complex Numbers From prevous classes, you may have encountered magnary numbers the square roots of negatve numbers and, more generally, complex numbers whch are the
80 Chapter 8 Secton 8 Polar Form of Complex Numbers From prevous classes, you may have encountered magnary numbers the square roots of negatve numbers and, more generally, complex numbers whch are the
SGNoise and AGDas - tools for processing of superconducting and absolute gravity data Vojtech Pálinkáš and Miloš Vaľko
 SGNose and AGDas - tools for processng of superconductng and absolute gravty data Vojtech Pálnkáš and Mloš Vaľko 1 Research Insttute of Geodesy, Topography and Cartography, Czech Republc SGNose Web tool
SGNose and AGDas - tools for processng of superconductng and absolute gravty data Vojtech Pálnkáš and Mloš Vaľko 1 Research Insttute of Geodesy, Topography and Cartography, Czech Republc SGNose Web tool
β0 + β1xi. You are interested in estimating the unknown parameters β
 Revsed: v3 Ordnar Least Squares (OLS): Smple Lnear Regresson (SLR) Analtcs The SLR Setup Sample Statstcs Ordnar Least Squares (OLS): FOCs and SOCs Back to OLS and Sample Statstcs Predctons (and Resduals)
Revsed: v3 Ordnar Least Squares (OLS): Smple Lnear Regresson (SLR) Analtcs The SLR Setup Sample Statstcs Ordnar Least Squares (OLS): FOCs and SOCs Back to OLS and Sample Statstcs Predctons (and Resduals)
Some modelling aspects for the Matlab implementation of MMA
 Some modellng aspects for the Matlab mplementaton of MMA Krster Svanberg krlle@math.kth.se Optmzaton and Systems Theory Department of Mathematcs KTH, SE 10044 Stockholm September 2004 1. Consdered optmzaton
Some modellng aspects for the Matlab mplementaton of MMA Krster Svanberg krlle@math.kth.se Optmzaton and Systems Theory Department of Mathematcs KTH, SE 10044 Stockholm September 2004 1. Consdered optmzaton
( ) [ ( k) ( k) ( x) ( ) ( ) ( ) [ ] ξ [ ] [ ] [ ] ( )( ) i ( ) ( )( ) 2! ( ) = ( ) 3 Interpolation. Polynomial Approximation.
![( ) [ ( k) ( k) ( x) ( ) ( ) ( ) [ ] ξ [ ] [ ] [ ] ( )( ) i ( ) ( )( ) 2! ( ) = ( ) 3 Interpolation. Polynomial Approximation.](/thumbs/84/90601477.jpg "( ) [ ( k) ( k) ( x) ( ) ( ) ( ) [ ] ξ [ ] [ ] [ ] ( )( ) i ( ) ( )( ) 2! ( ) = ( ) 3 Interpolation. Polynomial Approximation.") 3 Interpolaton {( y } Gven:,,,,,, [ ] Fnd: y for some Mn, Ma Polynomal Appromaton Theorem (Weerstrass Appromaton Theorem --- estence ε [ ab] f( P( , then there ests a polynomal
3 Interpolaton {( y } Gven:,,,,,, [ ] Fnd: y for some Mn, Ma Polynomal Appromaton Theorem (Weerstrass Appromaton Theorem --- estence ε [ ab] f( P( , then there ests a polynomal
EEE 241: Linear Systems
 EEE : Lnear Systems Summary #: Backpropagaton BACKPROPAGATION The perceptron rule as well as the Wdrow Hoff learnng were desgned to tran sngle layer networks. They suffer from the same dsadvantage: they
EEE : Lnear Systems Summary #: Backpropagaton BACKPROPAGATION The perceptron rule as well as the Wdrow Hoff learnng were desgned to tran sngle layer networks. They suffer from the same dsadvantage: they
Additional Codes using Finite Difference Method. 1 HJB Equation for Consumption-Saving Problem Without Uncertainty
 Addtonal Codes usng Fnte Dfference Method Benamn Moll 1 HJB Equaton for Consumpton-Savng Problem Wthout Uncertanty Before consderng the case wth stochastc ncome n http://www.prnceton.edu/~moll/ HACTproect/HACT_Numercal_Appendx.pdf,
Addtonal Codes usng Fnte Dfference Method Benamn Moll 1 HJB Equaton for Consumpton-Savng Problem Wthout Uncertanty Before consderng the case wth stochastc ncome n http://www.prnceton.edu/~moll/ HACTproect/HACT_Numercal_Appendx.pdf,
Logistic Regression. CAP 5610: Machine Learning Instructor: Guo-Jun QI
 Logstc Regresson CAP 561: achne Learnng Instructor: Guo-Jun QI Bayes Classfer: A Generatve model odel the posteror dstrbuton P(Y X) Estmate class-condtonal dstrbuton P(X Y) for each Y Estmate pror dstrbuton
Logstc Regresson CAP 561: achne Learnng Instructor: Guo-Jun QI Bayes Classfer: A Generatve model odel the posteror dstrbuton P(Y X) Estmate class-condtonal dstrbuton P(X Y) for each Y Estmate pror dstrbuton
College of Computer & Information Science Fall 2009 Northeastern University 20 October 2009
 College of Computer & Informaton Scence Fall 2009 Northeastern Unversty 20 October 2009 CS7880: Algorthmc Power Tools Scrbe: Jan Wen and Laura Poplawsk Lecture Outlne: Prmal-dual schema Network Desgn:
College of Computer & Informaton Scence Fall 2009 Northeastern Unversty 20 October 2009 CS7880: Algorthmc Power Tools Scrbe: Jan Wen and Laura Poplawsk Lecture Outlne: Prmal-dual schema Network Desgn:
CALCULUS CLASSROOM CAPSULES
 CALCULUS CLASSROOM CAPSULES SESSION S86 Dr. Sham Alfred Rartan Valley Communty College salfred@rartanval.edu 38th AMATYC Annual Conference Jacksonvlle, Florda November 8-, 202 2 Calculus Classroom Capsules
CALCULUS CLASSROOM CAPSULES SESSION S86 Dr. Sham Alfred Rartan Valley Communty College salfred@rartanval.edu 38th AMATYC Annual Conference Jacksonvlle, Florda November 8-, 202 2 Calculus Classroom Capsules
Lossy Compression. Compromise accuracy of reconstruction for increased compression.
 Lossy Compresson Compromse accuracy of reconstructon for ncreased compresson. The reconstructon s usually vsbly ndstngushable from the orgnal mage. Typcally, one can get up to 0:1 compresson wth almost
Lossy Compresson Compromse accuracy of reconstructon for ncreased compresson. The reconstructon s usually vsbly ndstngushable from the orgnal mage. Typcally, one can get up to 0:1 compresson wth almost
Linear Feature Engineering 11
 Lnear Feature Engneerng 11 2 Least-Squares 2.1 Smple least-squares Consder the followng dataset. We have a bunch of nputs x and correspondng outputs y. The partcular values n ths dataset are x y 0.23 0.19
Lnear Feature Engneerng 11 2 Least-Squares 2.1 Smple least-squares Consder the followng dataset. We have a bunch of nputs x and correspondng outputs y. The partcular values n ths dataset are x y 0.23 0.19
Vector Norms. Chapter 7 Iterative Techniques in Matrix Algebra. Cauchy-Bunyakovsky-Schwarz Inequality for Sums. Distances. Convergence.
 Vector Norms Chapter 7 Iteratve Technques n Matrx Algebra Per-Olof Persson persson@berkeley.edu Department of Mathematcs Unversty of Calforna, Berkeley Math 128B Numercal Analyss Defnton A vector norm
Vector Norms Chapter 7 Iteratve Technques n Matrx Algebra Per-Olof Persson persson@berkeley.edu Department of Mathematcs Unversty of Calforna, Berkeley Math 128B Numercal Analyss Defnton A vector norm
CSci 6974 and ECSE 6966 Math. Tech. for Vision, Graphics and Robotics Lecture 21, April 17, 2006 Estimating A Plane Homography
 CSc 6974 and ECSE 6966 Math. Tech. for Vson, Graphcs and Robotcs Lecture 21, Aprl 17, 2006 Estmatng A Plane Homography Overvew We contnue wth a dscusson of the major ssues, usng estmaton of plane projectve
CSc 6974 and ECSE 6966 Math. Tech. for Vson, Graphcs and Robotcs Lecture 21, Aprl 17, 2006 Estmatng A Plane Homography Overvew We contnue wth a dscusson of the major ssues, usng estmaton of plane projectve
Invariant deformation parameters from GPS permanent networks using stochastic interpolation
 Invarant deformaton parameters from GPS permanent networks usng stochastc nterpolaton Ludovco Bag, Poltecnco d Mlano, DIIAR Athanasos Dermans, Arstotle Unversty of Thessalonk Outlne Startng hypotheses
Invarant deformaton parameters from GPS permanent networks usng stochastc nterpolaton Ludovco Bag, Poltecnco d Mlano, DIIAR Athanasos Dermans, Arstotle Unversty of Thessalonk Outlne Startng hypotheses
Parameter estimation class 5
 Parameter estmaton class 5 Multple Ve Geometr Comp 9-89 Marc Pollefes Content Background: Projectve geometr (D, 3D), Parameter estmaton, Algortm evaluaton. Sngle Ve: Camera model, Calbraton, Sngle Ve Geometr.
Parameter estmaton class 5 Multple Ve Geometr Comp 9-89 Marc Pollefes Content Background: Projectve geometr (D, 3D), Parameter estmaton, Algortm evaluaton. Sngle Ve: Camera model, Calbraton, Sngle Ve Geometr.
Inner Product. Euclidean Space. Orthonormal Basis. Orthogonal
 Inner Product Defnton 1 () A Eucldean space s a fnte-dmensonal vector space over the reals R, wth an nner product,. Defnton 2 (Inner Product) An nner product, on a real vector space X s a symmetrc, blnear,
Inner Product Defnton 1 () A Eucldean space s a fnte-dmensonal vector space over the reals R, wth an nner product,. Defnton 2 (Inner Product) An nner product, on a real vector space X s a symmetrc, blnear,
Advanced Algebraic Algorithms on Integers and Polynomials
 Advanced Algebrac Algorthms on Integers and Polynomals Analyss of Algorthms Prepared by John Ref, Ph.D. Integer and Polynomal Computatons a) Newton Iteraton: applcaton to dvson b) Evaluaton and Interpolaton
Advanced Algebrac Algorthms on Integers and Polynomals Analyss of Algorthms Prepared by John Ref, Ph.D. Integer and Polynomal Computatons a) Newton Iteraton: applcaton to dvson b) Evaluaton and Interpolaton
Clustering & Unsupervised Learning
 Clusterng & Unsupervsed Learnng Ken Kreutz-Delgado (Nuno Vasconcelos) ECE 175A Wnter 2012 UCSD Statstcal Learnng Goal: Gven a relatonshp between a feature vector x and a vector y, and d data samples (x,y
Clusterng & Unsupervsed Learnng Ken Kreutz-Delgado (Nuno Vasconcelos) ECE 175A Wnter 2012 UCSD Statstcal Learnng Goal: Gven a relatonshp between a feature vector x and a vector y, and d data samples (x,y
Difference Equations
 Dfference Equatons c Jan Vrbk 1 Bascs Suppose a sequence of numbers, say a 0,a 1,a,a 3,... s defned by a certan general relatonshp between, say, three consecutve values of the sequence, e.g. a + +3a +1
Dfference Equatons c Jan Vrbk 1 Bascs Suppose a sequence of numbers, say a 0,a 1,a,a 3,... s defned by a certan general relatonshp between, say, three consecutve values of the sequence, e.g. a + +3a +1
Spatial Statistics and Analysis Methods (for GEOG 104 class).
.") Spatal Statstcs and Analyss Methods (for GEOG 104 class). Provded by Dr. An L, San Dego State Unversty. 1 Ponts Types of spatal data Pont pattern analyss (PPA; such as nearest neghbor dstance, quadrat
Spatal Statstcs and Analyss Methods (for GEOG 104 class). Provded by Dr. An L, San Dego State Unversty. 1 Ponts Types of spatal data Pont pattern analyss (PPA; such as nearest neghbor dstance, quadrat
Curve Fitting with the Least Square Method
 WIKI Document Number 5 Interpolaton wth Least Squares Curve Fttng wth the Least Square Method Mattheu Bultelle Department of Bo-Engneerng Imperal College, London Context We wsh to model the postve feedback
WIKI Document Number 5 Interpolaton wth Least Squares Curve Fttng wth the Least Square Method Mattheu Bultelle Department of Bo-Engneerng Imperal College, London Context We wsh to model the postve feedback
Multi-dimensional Central Limit Theorem
 Mult-dmensonal Central Lmt heorem Outlne ( ( ( t as ( + ( + + ( ( ( Consder a sequence of ndependent random proceses t, t, dentcal to some ( t. Assume t = 0. Defne the sum process t t t t = ( t = (; t
Mult-dmensonal Central Lmt heorem Outlne ( ( ( t as ( + ( + + ( ( ( Consder a sequence of ndependent random proceses t, t, dentcal to some ( t. Assume t = 0. Defne the sum process t t t t = ( t = (; t
a b a In case b 0, a being divisible by b is the same as to say that
 Secton 6.2 Dvsblty among the ntegers An nteger a ε s dvsble by b ε f there s an nteger c ε such that a = bc. Note that s dvsble by any nteger b, snce = b. On the other hand, a s dvsble by only f a = :
Secton 6.2 Dvsblty among the ntegers An nteger a ε s dvsble by b ε f there s an nteger c ε such that a = bc. Note that s dvsble by any nteger b, snce = b. On the other hand, a s dvsble by only f a = :
Originated from experimental optimization where measurements are very noisy Approximation can be actually more accurate than
 Surrogate (approxmatons) Orgnated from expermental optmzaton where measurements are ver nos Approxmaton can be actuall more accurate than data! Great nterest now n applng these technques to computer smulatons
Surrogate (approxmatons) Orgnated from expermental optmzaton where measurements are ver nos Approxmaton can be actuall more accurate than data! Great nterest now n applng these technques to computer smulatons
Computing Correlated Equilibria in Multi-Player Games
 Computng Correlated Equlbra n Mult-Player Games Chrstos H. Papadmtrou Presented by Zhanxang Huang December 7th, 2005 1 The Author Dr. Chrstos H. Papadmtrou CS professor at UC Berkley (taught at Harvard,
Computng Correlated Equlbra n Mult-Player Games Chrstos H. Papadmtrou Presented by Zhanxang Huang December 7th, 2005 1 The Author Dr. Chrstos H. Papadmtrou CS professor at UC Berkley (taught at Harvard,
An introduction to chaining, and applications to sublinear algorithms
 An ntroducton to channg, and applcatons to sublnear algorthms Jelan Nelson Harvard August 28, 2015 What s ths talk about? What s ths talk about? Gven a collecton of random varables X 1, X 2,...,, we would
An ntroducton to channg, and applcatons to sublnear algorthms Jelan Nelson Harvard August 28, 2015 What s ths talk about? What s ths talk about? Gven a collecton of random varables X 1, X 2,...,, we would
1 Convex Optimization
 Convex Optmzaton We wll consder convex optmzaton problems. Namely, mnmzaton problems where the objectve s convex (we assume no constrants for now). Such problems often arse n machne learnng. For example,
Convex Optmzaton We wll consder convex optmzaton problems. Namely, mnmzaton problems where the objectve s convex (we assume no constrants for now). Such problems often arse n machne learnng. For example,
Mud-rock line estimation via robust locally weighted scattering smoothing method
 Mud-roc lne va LOESS Mud-roc lne estmaton va robust locally weghted scatterng smoothng method A. Nassr Saeed, Laurence R. Lnes, and Gary F. Margrave ABSTRACT The robust locally weghted scatterng smoothng
Mud-roc lne va LOESS Mud-roc lne estmaton va robust locally weghted scatterng smoothng method A. Nassr Saeed, Laurence R. Lnes, and Gary F. Margrave ABSTRACT The robust locally weghted scatterng smoothng
Support Vector Machines
 Support Vector Machnes Konstantn Tretyakov (kt@ut.ee) MTAT.03.227 Machne Learnng So far Supervsed machne learnng Lnear models Least squares regresson Fsher s dscrmnant, Perceptron, Logstc model Non-lnear
Support Vector Machnes Konstantn Tretyakov (kt@ut.ee) MTAT.03.227 Machne Learnng So far Supervsed machne learnng Lnear models Least squares regresson Fsher s dscrmnant, Perceptron, Logstc model Non-lnear
For now, let us focus on a specific model of neurons. These are simplified from reality but can achieve remarkable results.
 Neural Networks : Dervaton compled by Alvn Wan from Professor Jtendra Malk s lecture Ths type of computaton s called deep learnng and s the most popular method for many problems, such as computer vson
Neural Networks : Dervaton compled by Alvn Wan from Professor Jtendra Malk s lecture Ths type of computaton s called deep learnng and s the most popular method for many problems, such as computer vson
Neural networks. Nuno Vasconcelos ECE Department, UCSD
 Neural networs Nuno Vasconcelos ECE Department, UCSD Classfcaton a classfcaton problem has two types of varables e.g. X - vector of observatons (features) n the world Y - state (class) of the world x X
Neural networs Nuno Vasconcelos ECE Department, UCSD Classfcaton a classfcaton problem has two types of varables e.g. X - vector of observatons (features) n the world Y - state (class) of the world x X
Intro to Visual Recognition
 CS 2770: Computer Vson Intro to Vsual Recognton Prof. Adrana Kovashka Unversty of Pttsburgh February 13, 2018 Plan for today What s recognton? a.k.a. classfcaton, categorzaton Support vector machnes Separable
CS 2770: Computer Vson Intro to Vsual Recognton Prof. Adrana Kovashka Unversty of Pttsburgh February 13, 2018 Plan for today What s recognton? a.k.a. classfcaton, categorzaton Support vector machnes Separable
Structured Perceptrons & Structural SVMs
 Structured Perceptrons Structural SVMs 4/6/27 CS 59: Advanced Topcs n Machne Learnng Recall: Sequence Predcton Input: x = (x,,x M ) Predct: y = (y,,y M ) Each y one of L labels. x = Fsh Sleep y = (N, V)
Structured Perceptrons Structural SVMs 4/6/27 CS 59: Advanced Topcs n Machne Learnng Recall: Sequence Predcton Input: x = (x,,x M ) Predct: y = (y,,y M ) Each y one of L labels. x = Fsh Sleep y = (N, V)
Maximum Likelihood Estimation
 Maxmum Lkelhood Estmaton INFO-2301: Quanttatve Reasonng 2 Mchael Paul and Jordan Boyd-Graber MARCH 7, 2017 INFO-2301: Quanttatve Reasonng 2 Paul and Boyd-Graber Maxmum Lkelhood Estmaton 1 of 9 Why MLE?
Maxmum Lkelhood Estmaton INFO-2301: Quanttatve Reasonng 2 Mchael Paul and Jordan Boyd-Graber MARCH 7, 2017 INFO-2301: Quanttatve Reasonng 2 Paul and Boyd-Graber Maxmum Lkelhood Estmaton 1 of 9 Why MLE?
8.6 The Complex Number System
 8.6 The Complex Number System Earler n the chapter, we mentoned that we cannot have a negatve under a square root, snce the square of any postve or negatve number s always postve. In ths secton we want
8.6 The Complex Number System Earler n the chapter, we mentoned that we cannot have a negatve under a square root, snce the square of any postve or negatve number s always postve. In ths secton we want
Multi-dimensional Central Limit Argument
 Mult-dmensonal Central Lmt Argument Outlne t as Consder d random proceses t, t,. Defne the sum process t t t t () t (); t () t are d to (), t () t 0 () t tme () t () t t t As, ( t) becomes a Gaussan random
Mult-dmensonal Central Lmt Argument Outlne t as Consder d random proceses t, t,. Defne the sum process t t t t () t (); t () t are d to (), t () t 0 () t tme () t () t t t As, ( t) becomes a Gaussan random
1 Matrix representations of canonical matrices
 1 Matrx representatons of canoncal matrces 2-d rotaton around the orgn: ( ) cos θ sn θ R 0 = sn θ cos θ 3-d rotaton around the x-axs: R x = 1 0 0 0 cos θ sn θ 0 sn θ cos θ 3-d rotaton around the y-axs:
1 Matrx representatons of canoncal matrces 2-d rotaton around the orgn: ( ) cos θ sn θ R 0 = sn θ cos θ 3-d rotaton around the x-axs: R x = 1 0 0 0 cos θ sn θ 0 sn θ cos θ 3-d rotaton around the y-axs: