Jonathan Mugan. July 15, 2013
|
|
|
- Evan Richardson
- 5 years ago
- Views:
Transcription



1 Jonthn Mugn July 15, 2013


2 Imgine rt in Skinner box. The rt cn see screen of imges, nd dot in the lower-right corner determines if there will be shock. Bottom-up methods my not find this dot, but top-down pproch requires supervisory signl. Our supervisory signl comes from predictions. 2

3 The importnce of top-down bstrction lerning Autonomous development with top-down bstrction lerning Appliction of utonomous development to cyber security Top-down bstrction lerning for cyber security 3
4 The importnce of top-down bstrction lerning Autonomous development with top-down bstrction lerning Appliction of utonomous development to cyber security Top-down bstrction lerning for cyber security 4
5 1. Begin with very brod discretiztion of the environment. 2. Simultneously lern discretiztion nd set of predictive models of the environment. 3. Convert the models into plns, nd form the plns into set of hierrchicl ctions. 4. Use lerned ctions to explore the environment. 5
6 Continuous vribles Discrete vribles Models of the environment Imges time Feedbck from model to discretiztion 6
7 Continuous vribles Imges time 7
8 Continuous vribles Discrete vribles Imges time 8
9 Continuous vribles Discrete vribles Models of the environment Imges time 9
10 Continuous vribles Discrete vribles Models of the environment Imges time Feedbck from model to discretiztion 10
11 () s Model Model in the form of dynmic Byesin network [Den nd Knzw, 1989] Pln Pln in the form of Q-function [Sutton nd Brto, 1998] 11
12 Low-level motor commnds The result is useful bstrct stte representtion nd hierrchy of effective higher-level ctions. 12
13 Qulittive Representtion Lerning Predictive Models From Models to s nd Plns Explortion 13
14 A qulittive representtion encodes the vlues of vribles reltive to known lndmrks [Kuipers, 1994] X Lndmrks bridge the gp between the continuous nd the discrete. The vrible vlue is either less thn, greter thn, or equl to tht lndmrk. 14
15 X lndmrks 15
16 X X x 16
17 X X x 17
18 Vrible X with lndmrks l 1, l 2 hs qulittive vlues Q X l l l l l l {(, ),,(, ),,(, )} 18 18
19 Initilly, vribles hve no lndmrks Q X {(, )} 19
20 Initilly, vribles hve no lndmrks Q X {(, )} But for ech vrible X we define X X X t t t 1 Q X {(,0),0,(0, )} {[ ],[0],[ ]} 20
21 1. Generliztion: different rel vlues mp to the sme qulittive vlue. 2. Focus: the lerner cn focus on importnt events. 21
22 Consider x Q X l1 l1 l1 l2 l2 l2 ( ) {(, ),,(, ),,(, )} event ( t, X, x) 22
23 Consider x Q X l1 l1 l1 l2 l2 l2 ( ) {(, ),,(, ),,(, )} Exmple: event ( t, X, l ) 2 X t 1 l 2 nd X t = l 2 X t l 2 23
 t '[ t t ' t k nd event ( t ', X, x)] soon is time window for n event to occur")
24 Consider x Q X l1 l1 l1 l2 l2 l2 ( ) {(, ),,(, ),,(, )} Exmple: event ( t, X, l ) 2 X t 1 l 2 nd X t = l 2 X t l 2 soon( t, X, x) t '[ t t ' t k nd event ( t ', X, x)] soon is time window for n event to occur 24
25 Qulittive Representtion Lerning Predictive Models From Models to s nd Plns Explortion 25
![A contingency is pir of events tht occur together in time. E.g., flip switch nd light goes on. Humns hve n innte contingency detection module [Gergely nd Wtson, 1999].](/docs-images/95/123502233/images/26-1.jpg "Humn infnts cn detect contingencies shortly fter birth [DeCsper nd Crstens, 1981]. Contingencies re: 1. Esy to lern; they only require looking t pirs of events. 2.")
26 A contingency is pir of events tht occur together in time. E.g., flip switch nd light goes on. Humns hve n innte contingency detection module [Gergely nd Wtson, 1999]. Humn infnts cn detect contingencies shortly fter birth [DeCsper nd Crstens, 1981]. Contingencies re: 1. Esy to lern; they only require looking t pirs of events. 2. A nturl representtion for plnning. 26
27 Lern contingency E E 1 2 when E 2 is more likely to soon occur given tht E 1 hs occurred thn otherwise P( soon( E ) E ) P( soon( E )) We look t ll pirs of events. 27
 Extrcted contingences become dynmic Byesin networks.")
28 consequent event ntecedent event event( t, X, x) soon( t, Y, y) Extrcted contingences become dynmic Byesin networks. 28
29 Context vribles lerned through mrginl ttribution [Drescher, 1991] consequent event ntecedent event event( t, X, x) soon( t, Y, y) V 1 V 1 context vribles V n V 2 Conditionl Probbility Tble 29
30 event( t, X, x) soon( t, Y, y) 30
31 event( t, X, x) soon( t, Y, y) Environment responds with yes or no. 92 Yes Vt () 93 Yes 96 Yes 100 No 103 No 105 No 31
32 event( t, X, x) soon( t, Y, y) Environment responds with yes or no. 92 Yes Vt () 93 Yes 96 Yes 100 No 103 No 105 No Fyyd nd Irni [1993] Entropy: Informtion gin: j 2 j H( S) P( S s )log P( S s ) S S I g H( S) H( S ) H( S ) S S j 32
33 Qulittive Representtion Lerning Predictive Models From Models to s nd Plns Explortion 33
34 Plnning in QLAP combines symbolic nd MDP plnning Symbolic Plnning MDP Plnning Useful when only some sttes nd vribles re relevnt. QLAP uses symbolic plnning to link models together. Useful when you need to model uncertinty. QLAP uses reinforcement lerning within models. d c b Q( s, ) P( s ' s, ) R( s ') mx Q( s ', ') ' s' 34
35 Low-level motor commnds There is pln nd ction for ech discrete motor vlue. Motor ctions directly set effectors. 35
36 Low-level motor commnds Esy to build on top of existing pieces. 36
37 Low-level motor commnds The end product of development. 37
38 38
39 Qulittive Representtion Lerning Predictive Models From Models to s nd Plns Explortion 39
40 40
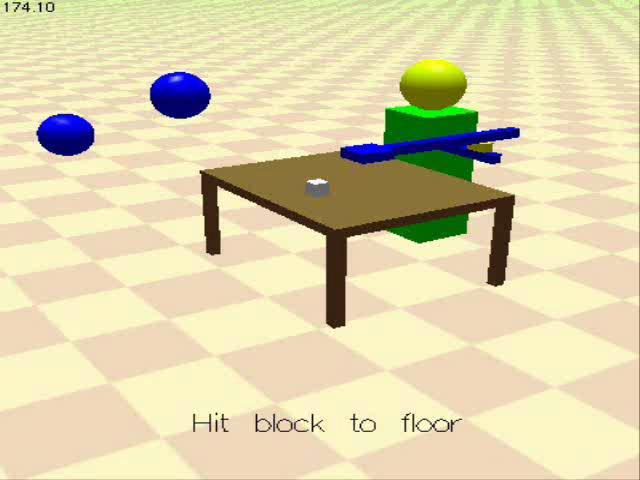
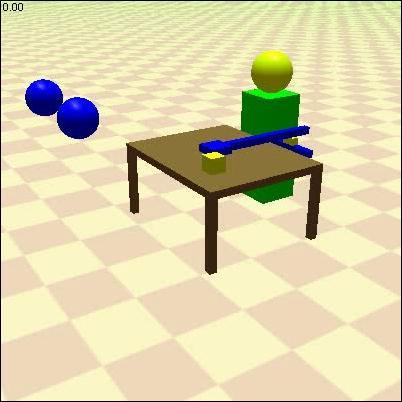
41 Lerns bstrctions: 1. The force needed to move the hnd. 2. The limits of movement. 3. Hving its hnd be the left or right of the block. the block. 41
42 42
43 43
44 44
45 The importnce of top-down bstrction lerning Autonomous development with top-down bstrction lerning Appliction of utonomous development to cyber security Top-down bstrction lerning for cyber security 45




46 QLAP Cy-QLAP 46
47 We expnded the QLAP developmentl lerning lgorithm into domin-generl system protection lgorithm. Generlized Cy-QLAP Algorithm 1. humn SME specifies set of sttes nd ctions 2. humn SME specifies set of undesirble events tht should be voided 3. Cy-QLAP ctively explores to lern the dynmics of the environment 4. do forever:. Cy-QLAP monitors the system to see if it is possible to formulte pln to bring bout n undesirble event b. If such pln is found, Cy-QLAP tkes proportionl ction to brek link in tht pln 47
48 Windows Registry Cy-QLAP Cy-QLAP remote process Windows logs pcket sniffer sensitive files Linux Ubuntu remote virtul mchine Windows 7 protected end node 48
49 sensitive files Windows 7 protected end node 49
50 Cy-QLAP sensitive files Windows 7 protected end node 50
51 Windows Registry Cy-QLAP Windows logs pcket sniffer sensitive files Windows 7 protected end node 51
52 Windows Registry Cy-QLAP Cy-QLAP remote process Windows logs pcket sniffer sensitive files Linux Ubuntu remote virtul mchine Windows 7 protected end node 52
53 Generlized Cy-QLAP Algorithm 1. humn SME specifies set of sttes nd ctions 2. humn SME specifies set of undesirble events tht should be voided 3. perform Autonomous Explortion nd Lerning 4. do forever:. ctivte the Thret Monitoring Module b. If such pln is found, ctivte the Thret Intervention Module 53
54 Cy-QLAP lerned the importnt dynmics of the environment Cy-QLAP lerned how to open file remotely exfiltrte file open nd close file shre 54
55 Generlized Cy-QLAP Algorithm 1. humn SME specifies set of sttes nd ctions 2. humn SME specifies set of undesirble events tht should be voided 3. perform Autonomous Explortion nd Lerning 4. do forever:. ctivte the Thret Monitoring Module b. If such pln is found, ctivte the Thret Intervention Module 55

56 Cy-QLAP: lerned tht if file shre ws open, sensitive file could be exfiltrted. lso lerned how to close file shres. Cy-QLAP therefore would close file shre s soon s it ws opened. Cy-QLAP lerned to protect the system without being told how. We know of no other cyber defense system tht lerns through explortion. 56
57 The importnce of top-down bstrction lerning Autonomous development with top-down bstrction lerning Appliction of utonomous development to cyber security Top-down bstrction lerning for cyber security 57

58 high-level bstrctions Instlled progrms System logs Processes System clls Register vlues low-level bstrctions 58
59 , X X x 0 100, ,,0 0,100 QLAP noted the rel vlue of ll vribles ech time model ws pplied. 59
60 Approch: define set of bstrction hierrchies nd note the vlue of the current nd next level of ech hierrchy ech time model is pplied Keep going down until the next level is not more relible thn the current level vlue field file vlue directory field Exmple: configurtion file bstrction hierrchy file 60

61 Jonthn Mugn 6011 West Courtyrd Drive Building 5, Suite 300 Austin, TX Phone: Fx:
WE would like to build intelligent agents that can. Autonomous Learning of High-Level States and Actions in Continuous Environments
 Autonomous Lerning of High-Level Sttes nd s in Continuous Environments Jonthn Mugn nd Benjmin Kuipers, Fellow, IEEE Abstrct How cn n gent bootstrp up from pixel-level representtion to utonomously lern
Autonomous Lerning of High-Level Sttes nd s in Continuous Environments Jonthn Mugn nd Benjmin Kuipers, Fellow, IEEE Abstrct How cn n gent bootstrp up from pixel-level representtion to utonomously lern
Autonomous Learning of High-Level States and Actions in Continuous Environments. Jonathan Mugan and Benjamin Kuipers, Fellow, IEEE
 Autonomous Lerning of High-Level Sttes nd s in Continuous Environments Jonthn Mugn nd Benjmin Kuipers, Fellow, IEEE Abstrct How cn n gent bootstrp up from low-level representtion to utonomously lern high-level
Autonomous Lerning of High-Level Sttes nd s in Continuous Environments Jonthn Mugn nd Benjmin Kuipers, Fellow, IEEE Abstrct How cn n gent bootstrp up from low-level representtion to utonomously lern high-level
Reinforcement Learning
 Reinforcement Lerning Tom Mitchell, Mchine Lerning, chpter 13 Outline Introduction Comprison with inductive lerning Mrkov Decision Processes: the model Optiml policy: The tsk Q Lerning: Q function Algorithm
Reinforcement Lerning Tom Mitchell, Mchine Lerning, chpter 13 Outline Introduction Comprison with inductive lerning Mrkov Decision Processes: the model Optiml policy: The tsk Q Lerning: Q function Algorithm
Reinforcement learning II
 CS 1675 Introduction to Mchine Lerning Lecture 26 Reinforcement lerning II Milos Huskrecht milos@cs.pitt.edu 5329 Sennott Squre Reinforcement lerning Bsics: Input x Lerner Output Reinforcement r Critic
CS 1675 Introduction to Mchine Lerning Lecture 26 Reinforcement lerning II Milos Huskrecht milos@cs.pitt.edu 5329 Sennott Squre Reinforcement lerning Bsics: Input x Lerner Output Reinforcement r Critic
Bellman Optimality Equation for V*
 Bellmn Optimlity Eqution for V* The vlue of stte under n optiml policy must equl the expected return for the best ction from tht stte: V (s) mx Q (s,) A(s) mx A(s) mx A(s) Er t 1 V (s t 1 ) s t s, t s
Bellmn Optimlity Eqution for V* The vlue of stte under n optiml policy must equl the expected return for the best ction from tht stte: V (s) mx Q (s,) A(s) mx A(s) mx A(s) Er t 1 V (s t 1 ) s t s, t s
State space systems analysis (continued) Stability. A. Definitions A system is said to be Asymptotically Stable (AS) when it satisfies
 Stability. A. Definitions A system is said to be Asymptotically Stable (AS) when it satisfies") Stte spce systems nlysis (continued) Stbility A. Definitions A system is sid to be Asymptoticlly Stble (AS) when it stisfies ut () = 0, t > 0 lim xt () 0. t A system is AS if nd only if the impulse response
Stte spce systems nlysis (continued) Stbility A. Definitions A system is sid to be Asymptoticlly Stble (AS) when it stisfies ut () = 0, t > 0 lim xt () 0. t A system is AS if nd only if the impulse response
DATA Search I 魏忠钰. 复旦大学大数据学院 School of Data Science, Fudan University. March 7 th, 2018
 DATA620006 魏忠钰 Serch I Mrch 7 th, 2018 Outline Serch Problems Uninformed Serch Depth-First Serch Bredth-First Serch Uniform-Cost Serch Rel world tsk - Pc-mn Serch problems A serch problem consists of:
DATA620006 魏忠钰 Serch I Mrch 7 th, 2018 Outline Serch Problems Uninformed Serch Depth-First Serch Bredth-First Serch Uniform-Cost Serch Rel world tsk - Pc-mn Serch problems A serch problem consists of:
The graphs of Rational Functions
 Lecture 4 5A: The its of Rtionl Functions s x nd s x + The grphs of Rtionl Functions The grphs of rtionl functions hve severl differences compred to power functions. One of the differences is the behvior
Lecture 4 5A: The its of Rtionl Functions s x nd s x + The grphs of Rtionl Functions The grphs of rtionl functions hve severl differences compred to power functions. One of the differences is the behvior
Administrivia CSE 190: Reinforcement Learning: An Introduction
 Administrivi CSE 190: Reinforcement Lerning: An Introduction Any emil sent to me bout the course should hve CSE 190 in the subject line! Chpter 4: Dynmic Progrmming Acknowledgment: A good number of these
Administrivi CSE 190: Reinforcement Lerning: An Introduction Any emil sent to me bout the course should hve CSE 190 in the subject line! Chpter 4: Dynmic Progrmming Acknowledgment: A good number of these
Fig. 1. Open-Loop and Closed-Loop Systems with Plant Variations
 ME 3600 Control ystems Chrcteristics of Open-Loop nd Closed-Loop ystems Importnt Control ystem Chrcteristics o ensitivity of system response to prmetric vritions cn be reduced o rnsient nd stedy-stte responses
ME 3600 Control ystems Chrcteristics of Open-Loop nd Closed-Loop ystems Importnt Control ystem Chrcteristics o ensitivity of system response to prmetric vritions cn be reduced o rnsient nd stedy-stte responses
{ } = E! & $ " k r t +k +1
 Chpter 4: Dynmic Progrmming Objectives of this chpter: Overview of collection of clssicl solution methods for MDPs known s dynmic progrmming (DP) Show how DP cn be used to compute vlue functions, nd hence,
Chpter 4: Dynmic Progrmming Objectives of this chpter: Overview of collection of clssicl solution methods for MDPs known s dynmic progrmming (DP) Show how DP cn be used to compute vlue functions, nd hence,
Chapter 4: Dynamic Programming
 Chpter 4: Dynmic Progrmming Objectives of this chpter: Overview of collection of clssicl solution methods for MDPs known s dynmic progrmming (DP) Show how DP cn be used to compute vlue functions, nd hence,
Chpter 4: Dynmic Progrmming Objectives of this chpter: Overview of collection of clssicl solution methods for MDPs known s dynmic progrmming (DP) Show how DP cn be used to compute vlue functions, nd hence,
1 Online Learning and Regret Minimization
 2.997 Decision-Mking in Lrge-Scle Systems My 10 MIT, Spring 2004 Hndout #29 Lecture Note 24 1 Online Lerning nd Regret Minimiztion In this lecture, we consider the problem of sequentil decision mking in
2.997 Decision-Mking in Lrge-Scle Systems My 10 MIT, Spring 2004 Hndout #29 Lecture Note 24 1 Online Lerning nd Regret Minimiztion In this lecture, we consider the problem of sequentil decision mking in
Acceptance Sampling by Attributes
 Introduction Acceptnce Smpling by Attributes Acceptnce smpling is concerned with inspection nd decision mking regrding products. Three spects of smpling re importnt: o Involves rndom smpling of n entire
Introduction Acceptnce Smpling by Attributes Acceptnce smpling is concerned with inspection nd decision mking regrding products. Three spects of smpling re importnt: o Involves rndom smpling of n entire
Properties of Integrals, Indefinite Integrals. Goals: Definition of the Definite Integral Integral Calculations using Antiderivatives
 Block #6: Properties of Integrls, Indefinite Integrls Gols: Definition of the Definite Integrl Integrl Clcultions using Antiderivtives Properties of Integrls The Indefinite Integrl 1 Riemnn Sums - 1 Riemnn
Block #6: Properties of Integrls, Indefinite Integrls Gols: Definition of the Definite Integrl Integrl Clcultions using Antiderivtives Properties of Integrls The Indefinite Integrl 1 Riemnn Sums - 1 Riemnn
New data structures to reduce data size and search time
 New dt structures to reduce dt size nd serch time Tsuneo Kuwbr Deprtment of Informtion Sciences, Fculty of Science, Kngw University, Hirtsuk-shi, Jpn FIT2018 1D-1, No2, pp1-4 Copyright (c)2018 by The Institute
New dt structures to reduce dt size nd serch time Tsuneo Kuwbr Deprtment of Informtion Sciences, Fculty of Science, Kngw University, Hirtsuk-shi, Jpn FIT2018 1D-1, No2, pp1-4 Copyright (c)2018 by The Institute
CSCI FOUNDATIONS OF COMPUTER SCIENCE
 1 CSCI- 2200 FOUNDATIONS OF COMPUTER SCIENCE Spring 2015 My 7, 2015 2 Announcements Homework 9 is due now. Some finl exm review problems will be posted on the web site tody. These re prcqce problems not
1 CSCI- 2200 FOUNDATIONS OF COMPUTER SCIENCE Spring 2015 My 7, 2015 2 Announcements Homework 9 is due now. Some finl exm review problems will be posted on the web site tody. These re prcqce problems not
Chapters 4 & 5 Integrals & Applications
 Contents Chpters 4 & 5 Integrls & Applictions Motivtion to Chpters 4 & 5 2 Chpter 4 3 Ares nd Distnces 3. VIDEO - Ares Under Functions............................................ 3.2 VIDEO - Applictions
Contents Chpters 4 & 5 Integrls & Applictions Motivtion to Chpters 4 & 5 2 Chpter 4 3 Ares nd Distnces 3. VIDEO - Ares Under Functions............................................ 3.2 VIDEO - Applictions
Physics 202H - Introductory Quantum Physics I Homework #08 - Solutions Fall 2004 Due 5:01 PM, Monday 2004/11/15
 Physics H - Introductory Quntum Physics I Homework #8 - Solutions Fll 4 Due 5:1 PM, Mondy 4/11/15 [55 points totl] Journl questions. Briefly shre your thoughts on the following questions: Of the mteril
Physics H - Introductory Quntum Physics I Homework #8 - Solutions Fll 4 Due 5:1 PM, Mondy 4/11/15 [55 points totl] Journl questions. Briefly shre your thoughts on the following questions: Of the mteril
Duality # Second iteration for HW problem. Recall our LP example problem we have been working on, in equality form, is given below.
 Dulity #. Second itertion for HW problem Recll our LP emple problem we hve been working on, in equlity form, is given below.,,,, 8 m F which, when written in slightly different form, is 8 F Recll tht we
Dulity #. Second itertion for HW problem Recll our LP emple problem we hve been working on, in equlity form, is given below.,,,, 8 m F which, when written in slightly different form, is 8 F Recll tht we
Logarithms. Logarithm is another word for an index or power. POWER. 2 is the power to which the base 10 must be raised to give 100.
 Logrithms. Logrithm is nother word for n inde or power. THIS IS A POWER STATEMENT BASE POWER FOR EXAMPLE : We lred know tht; = NUMBER 10² = 100 This is the POWER Sttement OR 2 is the power to which the
Logrithms. Logrithm is nother word for n inde or power. THIS IS A POWER STATEMENT BASE POWER FOR EXAMPLE : We lred know tht; = NUMBER 10² = 100 This is the POWER Sttement OR 2 is the power to which the
Solution for Assignment 1 : Intro to Probability and Statistics, PAC learning
 Solution for Assignment 1 : Intro to Probbility nd Sttistics, PAC lerning 10-701/15-781: Mchine Lerning (Fll 004) Due: Sept. 30th 004, Thursdy, Strt of clss Question 1. Bsic Probbility ( 18 pts) 1.1 (
Solution for Assignment 1 : Intro to Probbility nd Sttistics, PAC lerning 10-701/15-781: Mchine Lerning (Fll 004) Due: Sept. 30th 004, Thursdy, Strt of clss Question 1. Bsic Probbility ( 18 pts) 1.1 (
GRADE 4. Division WORKSHEETS
 GRADE Division WORKSHEETS Division division is shring nd grouping Division cn men shring or grouping. There re cndies shred mong kids. How mny re in ech shre? = 3 There re 6 pples nd go into ech bsket.
GRADE Division WORKSHEETS Division division is shring nd grouping Division cn men shring or grouping. There re cndies shred mong kids. How mny re in ech shre? = 3 There re 6 pples nd go into ech bsket.
CS 188 Introduction to Artificial Intelligence Fall 2018 Note 7
 CS 188 Introduction to Artificil Intelligence Fll 2018 Note 7 These lecture notes re hevily bsed on notes originlly written by Nikhil Shrm. Decision Networks In the third note, we lerned bout gme trees
CS 188 Introduction to Artificil Intelligence Fll 2018 Note 7 These lecture notes re hevily bsed on notes originlly written by Nikhil Shrm. Decision Networks In the third note, we lerned bout gme trees
1. Extend QR downwards to meet the x-axis at U(6, 0). y
. y") In the digrm, two stright lines re to be drwn through so tht the lines divide the figure OPQRST into pieces of equl re Find the sum of the slopes of the lines R(6, ) S(, ) T(, 0) Determine ll liner functions
In the digrm, two stright lines re to be drwn through so tht the lines divide the figure OPQRST into pieces of equl re Find the sum of the slopes of the lines R(6, ) S(, ) T(, 0) Determine ll liner functions
Recursively Enumerable and Recursive. Languages
 Recursively Enumerble nd Recursive nguges 1 Recll Definition (clss 19.pdf) Definition 10.4, inz, 6 th, pge 279 et S be set of strings. An enumertion procedure for Turing Mchine tht genertes ll strings
Recursively Enumerble nd Recursive nguges 1 Recll Definition (clss 19.pdf) Definition 10.4, inz, 6 th, pge 279 et S be set of strings. An enumertion procedure for Turing Mchine tht genertes ll strings
Goals: Determine how to calculate the area described by a function. Define the definite integral. Explore the relationship between the definite
 Unit #8 : The Integrl Gols: Determine how to clculte the re described by function. Define the definite integrl. Eplore the reltionship between the definite integrl nd re. Eplore wys to estimte the definite
Unit #8 : The Integrl Gols: Determine how to clculte the re described by function. Define the definite integrl. Eplore the reltionship between the definite integrl nd re. Eplore wys to estimte the definite
4 7x =250; 5 3x =500; Read section 3.3, 3.4 Announcements: Bell Ringer: Use your calculator to solve
 Dte: 3/14/13 Objective: SWBAT pply properties of exponentil functions nd will pply properties of rithms. Bell Ringer: Use your clcultor to solve 4 7x =250; 5 3x =500; HW Requests: Properties of Log Equtions
Dte: 3/14/13 Objective: SWBAT pply properties of exponentil functions nd will pply properties of rithms. Bell Ringer: Use your clcultor to solve 4 7x =250; 5 3x =500; HW Requests: Properties of Log Equtions
Refined interfaces for compositional verification
 Refined interfces for compositionl verifiction Frédéric Lng INRI Rhône-lpes http://www.inrilpes.fr/vsy Motivtion Enumertive verifiction of concurrent systems Prllel composition of synchronous processes
Refined interfces for compositionl verifiction Frédéric Lng INRI Rhône-lpes http://www.inrilpes.fr/vsy Motivtion Enumertive verifiction of concurrent systems Prllel composition of synchronous processes
We will see what is meant by standard form very shortly
 THEOREM: For fesible liner progrm in its stndrd form, the optimum vlue of the objective over its nonempty fesible region is () either unbounded or (b) is chievble t lest t one extreme point of the fesible
THEOREM: For fesible liner progrm in its stndrd form, the optimum vlue of the objective over its nonempty fesible region is () either unbounded or (b) is chievble t lest t one extreme point of the fesible
12 TRANSFORMING BIVARIATE DENSITY FUNCTIONS
 1 TRANSFORMING BIVARIATE DENSITY FUNCTIONS Hving seen how to trnsform the probbility density functions ssocited with single rndom vrible, the next logicl step is to see how to trnsform bivrite probbility
1 TRANSFORMING BIVARIATE DENSITY FUNCTIONS Hving seen how to trnsform the probbility density functions ssocited with single rndom vrible, the next logicl step is to see how to trnsform bivrite probbility
UNIT 1 FUNCTIONS AND THEIR INVERSES Lesson 1.4: Logarithmic Functions as Inverses Instruction
 Lesson : Logrithmic Functions s Inverses Prerequisite Skills This lesson requires the use of the following skills: determining the dependent nd independent vribles in n exponentil function bsed on dt from
Lesson : Logrithmic Functions s Inverses Prerequisite Skills This lesson requires the use of the following skills: determining the dependent nd independent vribles in n exponentil function bsed on dt from
Unit #9 : Definite Integral Properties; Fundamental Theorem of Calculus
 Unit #9 : Definite Integrl Properties; Fundmentl Theorem of Clculus Gols: Identify properties of definite integrls Define odd nd even functions, nd reltionship to integrl vlues Introduce the Fundmentl
Unit #9 : Definite Integrl Properties; Fundmentl Theorem of Clculus Gols: Identify properties of definite integrls Define odd nd even functions, nd reltionship to integrl vlues Introduce the Fundmentl
a n = 1 58 a n+1 1 = 57a n + 1 a n = 56(a n 1) 57 so 0 a n+1 1, and the required result is true, by induction.
 57 so 0 a n+1 1, and the required result is true, by induction.") MAS221(216-17) Exm Solutions 1. (i) A is () bounded bove if there exists K R so tht K for ll A ; (b) it is bounded below if there exists L R so tht L for ll A. e.g. the set { n; n N} is bounded bove (by
MAS221(216-17) Exm Solutions 1. (i) A is () bounded bove if there exists K R so tht K for ll A ; (b) it is bounded below if there exists L R so tht L for ll A. e.g. the set { n; n N} is bounded bove (by
Reversals of Signal-Posterior Monotonicity for Any Bounded Prior
 Reversls of Signl-Posterior Monotonicity for Any Bounded Prior Christopher P. Chmbers Pul J. Hely Abstrct Pul Milgrom (The Bell Journl of Economics, 12(2): 380 391) showed tht if the strict monotone likelihood
Reversls of Signl-Posterior Monotonicity for Any Bounded Prior Christopher P. Chmbers Pul J. Hely Abstrct Pul Milgrom (The Bell Journl of Economics, 12(2): 380 391) showed tht if the strict monotone likelihood
Intermediate Math Circles Wednesday, November 14, 2018 Finite Automata II. Nickolas Rollick a b b. a b 4
 Intermedite Mth Circles Wednesdy, Novemer 14, 2018 Finite Automt II Nickols Rollick nrollick@uwterloo.c Regulr Lnguges Lst time, we were introduced to the ide of DFA (deterministic finite utomton), one
Intermedite Mth Circles Wednesdy, Novemer 14, 2018 Finite Automt II Nickols Rollick nrollick@uwterloo.c Regulr Lnguges Lst time, we were introduced to the ide of DFA (deterministic finite utomton), one
6.2 The Pythagorean Theorems
 PythgorenTheorems20052006.nb 1 6.2 The Pythgoren Theorems One of the best known theorems in geometry (nd ll of mthemtics for tht mtter) is the Pythgoren Theorem. You hve probbly lredy worked with this
PythgorenTheorems20052006.nb 1 6.2 The Pythgoren Theorems One of the best known theorems in geometry (nd ll of mthemtics for tht mtter) is the Pythgoren Theorem. You hve probbly lredy worked with this
Lecture 3 ( ) (translated and slightly adapted from lecture notes by Martin Klazar)
 (translated and slightly adapted from lecture notes by Martin Klazar)") Lecture 3 (5.3.2018) (trnslted nd slightly dpted from lecture notes by Mrtin Klzr) Riemnn integrl Now we define precisely the concept of the re, in prticulr, the re of figure U(, b, f) under the grph of
Lecture 3 (5.3.2018) (trnslted nd slightly dpted from lecture notes by Mrtin Klzr) Riemnn integrl Now we define precisely the concept of the re, in prticulr, the re of figure U(, b, f) under the grph of
Definite Integrals. The area under a curve can be approximated by adding up the areas of rectangles = 1 1 +
 Definite Integrls --5 The re under curve cn e pproximted y dding up the res of rectngles. Exmple. Approximte the re under y = from x = to x = using equl suintervls nd + x evluting the function t the left-hnd
Definite Integrls --5 The re under curve cn e pproximted y dding up the res of rectngles. Exmple. Approximte the re under y = from x = to x = using equl suintervls nd + x evluting the function t the left-hnd
2D1431 Machine Learning Lab 3: Reinforcement Learning
 2D1431 Mchine Lerning Lb 3: Reinforcement Lerning Frnk Hoffmnn modified by Örjn Ekeberg December 7, 2004 1 Introduction In this lb you will lern bout dynmic progrmming nd reinforcement lerning. It is ssumed
2D1431 Mchine Lerning Lb 3: Reinforcement Lerning Frnk Hoffmnn modified by Örjn Ekeberg December 7, 2004 1 Introduction In this lb you will lern bout dynmic progrmming nd reinforcement lerning. It is ssumed
15. Quantisation Noise and Nonuniform Quantisation
 5. Quntistion Noise nd Nonuniform Quntistion In PCM, n nlogue signl is smpled, quntised, nd coded into sequence of digits. Once we hve quntised the smpled signls, the exct vlues of the smpled signls cn
5. Quntistion Noise nd Nonuniform Quntistion In PCM, n nlogue signl is smpled, quntised, nd coded into sequence of digits. Once we hve quntised the smpled signls, the exct vlues of the smpled signls cn
Read section 3.3, 3.4 Announcements:
 Dte: 3/1/13 Objective: SWBAT pply properties of exponentil functions nd will pply properties of rithms. Bell Ringer: 1. f x = 3x 6, find the inverse, f 1 x., Using your grphing clcultor, Grph 1. f x,f
Dte: 3/1/13 Objective: SWBAT pply properties of exponentil functions nd will pply properties of rithms. Bell Ringer: 1. f x = 3x 6, find the inverse, f 1 x., Using your grphing clcultor, Grph 1. f x,f
Chapter 0. What is the Lebesgue integral about?
 Chpter 0. Wht is the Lebesgue integrl bout? The pln is to hve tutoril sheet ech week, most often on Fridy, (to be done during the clss) where you will try to get used to the ides introduced in the previous
Chpter 0. Wht is the Lebesgue integrl bout? The pln is to hve tutoril sheet ech week, most often on Fridy, (to be done during the clss) where you will try to get used to the ides introduced in the previous
MATH 101A: ALGEBRA I PART B: RINGS AND MODULES 35
 MATH 101A: ALGEBRA I PART B: RINGS AND MODULES 35 9. Modules over PID This week we re proving the fundmentl theorem for finitely generted modules over PID, nmely tht they re ll direct sums of cyclic modules.
MATH 101A: ALGEBRA I PART B: RINGS AND MODULES 35 9. Modules over PID This week we re proving the fundmentl theorem for finitely generted modules over PID, nmely tht they re ll direct sums of cyclic modules.
4.4 Areas, Integrals and Antiderivatives
 . res, integrls nd ntiderivtives 333. Ares, Integrls nd Antiderivtives This section explores properties of functions defined s res nd exmines some connections mong res, integrls nd ntiderivtives. In order
. res, integrls nd ntiderivtives 333. Ares, Integrls nd Antiderivtives This section explores properties of functions defined s res nd exmines some connections mong res, integrls nd ntiderivtives. In order
Chapter 6 Notes, Larson/Hostetler 3e
 Contents 6. Antiderivtives nd the Rules of Integrtion.......................... 6. Are nd the Definite Integrl.................................. 6.. Are............................................ 6. Reimnn
Contents 6. Antiderivtives nd the Rules of Integrtion.......................... 6. Are nd the Definite Integrl.................................. 6.. Are............................................ 6. Reimnn
Local orthogonality: a multipartite principle for (quantum) correlations
 correlations") Locl orthogonlity: multiprtite principle for (quntum) correltions Antonio Acín ICREA Professor t ICFO-Institut de Ciencies Fotoniques, Brcelon Cusl Structure in Quntum Theory, Bensque, Spin, June 2013
Locl orthogonlity: multiprtite principle for (quntum) correltions Antonio Acín ICREA Professor t ICFO-Institut de Ciencies Fotoniques, Brcelon Cusl Structure in Quntum Theory, Bensque, Spin, June 2013
LECTURE NOTE #12 PROF. ALAN YUILLE
 LECTURE NOTE #12 PROF. ALAN YUILLE 1. Clustering, K-mens, nd EM Tsk: set of unlbeled dt D = {x 1,..., x n } Decompose into clsses w 1,..., w M where M is unknown. Lern clss models p(x w)) Discovery of
LECTURE NOTE #12 PROF. ALAN YUILLE 1. Clustering, K-mens, nd EM Tsk: set of unlbeled dt D = {x 1,..., x n } Decompose into clsses w 1,..., w M where M is unknown. Lern clss models p(x w)) Discovery of
Applying Q-Learning to Flappy Bird
 Applying Q-Lerning to Flppy Bird Moritz Ebeling-Rump, Mnfred Ko, Zchry Hervieux-Moore Abstrct The field of mchine lerning is n interesting nd reltively new re of reserch in rtificil intelligence. In this
Applying Q-Lerning to Flppy Bird Moritz Ebeling-Rump, Mnfred Ko, Zchry Hervieux-Moore Abstrct The field of mchine lerning is n interesting nd reltively new re of reserch in rtificil intelligence. In this
CS 188: Artificial Intelligence Spring 2007
 CS 188: Artificil Intelligence Spring 2007 Lecture 3: Queue-Bsed Serch 1/23/2007 Srini Nrynn UC Berkeley Mny slides over the course dpted from Dn Klein, Sturt Russell or Andrew Moore Announcements Assignment
CS 188: Artificil Intelligence Spring 2007 Lecture 3: Queue-Bsed Serch 1/23/2007 Srini Nrynn UC Berkeley Mny slides over the course dpted from Dn Klein, Sturt Russell or Andrew Moore Announcements Assignment
Chapter 14. Matrix Representations of Linear Transformations
 Chpter 4 Mtrix Representtions of Liner Trnsformtions When considering the Het Stte Evolution, we found tht we could describe this process using multipliction by mtrix. This ws nice becuse computers cn
Chpter 4 Mtrix Representtions of Liner Trnsformtions When considering the Het Stte Evolution, we found tht we could describe this process using multipliction by mtrix. This ws nice becuse computers cn
Week 10: Line Integrals
 Week 10: Line Integrls Introduction In this finl week we return to prmetrised curves nd consider integrtion long such curves. We lredy sw this in Week 2 when we integrted long curve to find its length.
Week 10: Line Integrls Introduction In this finl week we return to prmetrised curves nd consider integrtion long such curves. We lredy sw this in Week 2 when we integrted long curve to find its length.
Math 426: Probability Final Exam Practice
 Mth 46: Probbility Finl Exm Prctice. Computtionl problems 4. Let T k (n) denote the number of prtitions of the set {,..., n} into k nonempty subsets, where k n. Argue tht T k (n) kt k (n ) + T k (n ) by
Mth 46: Probbility Finl Exm Prctice. Computtionl problems 4. Let T k (n) denote the number of prtitions of the set {,..., n} into k nonempty subsets, where k n. Argue tht T k (n) kt k (n ) + T k (n ) by
Summary: Method of Separation of Variables
 Physics 246 Electricity nd Mgnetism I, Fll 26, Lecture 22 1 Summry: Method of Seprtion of Vribles 1. Seprtion of Vribles in Crtesin Coordintes 2. Fourier Series Suggested Reding: Griffiths: Chpter 3, Section
Physics 246 Electricity nd Mgnetism I, Fll 26, Lecture 22 1 Summry: Method of Seprtion of Vribles 1. Seprtion of Vribles in Crtesin Coordintes 2. Fourier Series Suggested Reding: Griffiths: Chpter 3, Section
19 Optimal behavior: Game theory
 Intro. to Artificil Intelligence: Dle Schuurmns, Relu Ptrscu 1 19 Optiml behvior: Gme theory Adversril stte dynmics hve to ccount for worst cse Compute policy π : S A tht mximizes minimum rewrd Let S (,
Intro. to Artificil Intelligence: Dle Schuurmns, Relu Ptrscu 1 19 Optiml behvior: Gme theory Adversril stte dynmics hve to ccount for worst cse Compute policy π : S A tht mximizes minimum rewrd Let S (,
Before we can begin Ch. 3 on Radicals, we need to be familiar with perfect squares, cubes, etc. Try and do as many as you can without a calculator!!!
 Nme: Algebr II Honors Pre-Chpter Homework Before we cn begin Ch on Rdicls, we need to be fmilir with perfect squres, cubes, etc Try nd do s mny s you cn without clcultor!!! n The nth root of n n Be ble
Nme: Algebr II Honors Pre-Chpter Homework Before we cn begin Ch on Rdicls, we need to be fmilir with perfect squres, cubes, etc Try nd do s mny s you cn without clcultor!!! n The nth root of n n Be ble
1 Probability Density Functions
 Lis Yn CS 9 Continuous Distributions Lecture Notes #9 July 6, 28 Bsed on chpter by Chris Piech So fr, ll rndom vribles we hve seen hve been discrete. In ll the cses we hve seen in CS 9, this ment tht our
Lis Yn CS 9 Continuous Distributions Lecture Notes #9 July 6, 28 Bsed on chpter by Chris Piech So fr, ll rndom vribles we hve seen hve been discrete. In ll the cses we hve seen in CS 9, this ment tht our
New Expansion and Infinite Series
 Interntionl Mthemticl Forum, Vol. 9, 204, no. 22, 06-073 HIKARI Ltd, www.m-hikri.com http://dx.doi.org/0.2988/imf.204.4502 New Expnsion nd Infinite Series Diyun Zhng College of Computer Nnjing University
Interntionl Mthemticl Forum, Vol. 9, 204, no. 22, 06-073 HIKARI Ltd, www.m-hikri.com http://dx.doi.org/0.2988/imf.204.4502 New Expnsion nd Infinite Series Diyun Zhng College of Computer Nnjing University
Reinforcement learning
 Reinforcement lerning Regulr MDP Given: Trnition model P Rewrd function R Find: Policy π Reinforcement lerning Trnition model nd rewrd function initilly unknown Still need to find the right policy Lern
Reinforcement lerning Regulr MDP Given: Trnition model P Rewrd function R Find: Policy π Reinforcement lerning Trnition model nd rewrd function initilly unknown Still need to find the right policy Lern
Module 6 Value Iteration. CS 886 Sequential Decision Making and Reinforcement Learning University of Waterloo
 Module 6 Vlue Itertion CS 886 Sequentil Decision Mking nd Reinforcement Lerning University of Wterloo Mrkov Decision Process Definition Set of sttes: S Set of ctions (i.e., decisions): A Trnsition model:
Module 6 Vlue Itertion CS 886 Sequentil Decision Mking nd Reinforcement Lerning University of Wterloo Mrkov Decision Process Definition Set of sttes: S Set of ctions (i.e., decisions): A Trnsition model:
10 Vector Integral Calculus
 Vector Integrl lculus Vector integrl clculus extends integrls s known from clculus to integrls over curves ("line integrls"), surfces ("surfce integrls") nd solids ("volume integrls"). These integrls hve
Vector Integrl lculus Vector integrl clculus extends integrls s known from clculus to integrls over curves ("line integrls"), surfces ("surfce integrls") nd solids ("volume integrls"). These integrls hve
Exploring Continuous Action Spaces with Diffusion Trees for Reinforcement Learning
 Exploring Continuous Action Spces with Diffusion Trees for Reinforcement Lerning Christin Vollmer, Erik Schffernicht, nd Horst-Michel Gross Neuroinformtics nd Cognitive Robotics Lb Ilmenu University of
Exploring Continuous Action Spces with Diffusion Trees for Reinforcement Lerning Christin Vollmer, Erik Schffernicht, nd Horst-Michel Gross Neuroinformtics nd Cognitive Robotics Lb Ilmenu University of
More on automata. Michael George. March 24 April 7, 2014
 More on utomt Michel George Mrch 24 April 7, 2014 1 Automt constructions Now tht we hve forml model of mchine, it is useful to mke some generl constructions. 1.1 DFA Union / Product construction Suppose
More on utomt Michel George Mrch 24 April 7, 2014 1 Automt constructions Now tht we hve forml model of mchine, it is useful to mke some generl constructions. 1.1 DFA Union / Product construction Suppose
Decision Networks. CS 188: Artificial Intelligence Fall Example: Decision Networks. Decision Networks. Decisions as Outcome Trees
 CS 188: Artificil Intelligence Fll 2011 Decision Networks ME: choose the ction which mximizes the expected utility given the evidence mbrell Lecture 17: Decision Digrms 10/27/2011 Cn directly opertionlize
CS 188: Artificil Intelligence Fll 2011 Decision Networks ME: choose the ction which mximizes the expected utility given the evidence mbrell Lecture 17: Decision Digrms 10/27/2011 Cn directly opertionlize
Reasoning with Bayesian Networks
 Complexity of Probbilistic Inference Compiling Byesin Networks Resoning with Byesin Networks Lecture 5: Complexity of Probbilistic Inference, Compiling Byesin Networks Jinbo Hung NICTA nd ANU Jinbo Hung
Complexity of Probbilistic Inference Compiling Byesin Networks Resoning with Byesin Networks Lecture 5: Complexity of Probbilistic Inference, Compiling Byesin Networks Jinbo Hung NICTA nd ANU Jinbo Hung
X Z Y Table 1: Possibles values for Y = XZ. 1, p
 ECE 534: Elements of Informtion Theory, Fll 00 Homework 7 Solutions ll by Kenneth Plcio Bus October 4, 00. Problem 7.3. Binry multiplier chnnel () Consider the chnnel Y = XZ, where X nd Z re independent
ECE 534: Elements of Informtion Theory, Fll 00 Homework 7 Solutions ll by Kenneth Plcio Bus October 4, 00. Problem 7.3. Binry multiplier chnnel () Consider the chnnel Y = XZ, where X nd Z re independent
Math 4310 Solutions to homework 1 Due 9/1/16
 Mth 4310 Solutions to homework 1 Due 9/1/16 1. Use the Eucliden lgorithm to find the following gretest common divisors. () gcd(252, 180) = 36 (b) gcd(513, 187) = 1 (c) gcd(7684, 4148) = 68 252 = 180 1
Mth 4310 Solutions to homework 1 Due 9/1/16 1. Use the Eucliden lgorithm to find the following gretest common divisors. () gcd(252, 180) = 36 (b) gcd(513, 187) = 1 (c) gcd(7684, 4148) = 68 252 = 180 1
ROB EBY Blinn College Mathematics Department
 ROB EBY Blinn College Mthemtics Deprtment Mthemtics Deprtment 5.1, 5.2 Are, Definite Integrls MATH 2413 Rob Eby-Fll 26 Weknowthtwhengiventhedistncefunction, wecnfindthevelocitytnypointbyfindingthederivtiveorinstntneous
ROB EBY Blinn College Mthemtics Deprtment Mthemtics Deprtment 5.1, 5.2 Are, Definite Integrls MATH 2413 Rob Eby-Fll 26 Weknowthtwhengiventhedistncefunction, wecnfindthevelocitytnypointbyfindingthederivtiveorinstntneous
Math 31S. Rumbos Fall Solutions to Assignment #16
 Mth 31S. Rumbos Fll 2016 1 Solutions to Assignment #16 1. Logistic Growth 1. Suppose tht the growth of certin niml popultion is governed by the differentil eqution 1000 dn N dt = 100 N, (1) where N(t)
Mth 31S. Rumbos Fll 2016 1 Solutions to Assignment #16 1. Logistic Growth 1. Suppose tht the growth of certin niml popultion is governed by the differentil eqution 1000 dn N dt = 100 N, (1) where N(t)
Riemann Integrals and the Fundamental Theorem of Calculus
 Riemnn Integrls nd the Fundmentl Theorem of Clculus Jmes K. Peterson Deprtment of Biologicl Sciences nd Deprtment of Mthemticl Sciences Clemson University September 16, 2013 Outline Grphing Riemnn Sums
Riemnn Integrls nd the Fundmentl Theorem of Clculus Jmes K. Peterson Deprtment of Biologicl Sciences nd Deprtment of Mthemticl Sciences Clemson University September 16, 2013 Outline Grphing Riemnn Sums
Uninformed Search Lecture 4
 Lecture 4 Wht re common serch strtegies tht operte given only serch problem? How do they compre? 1 Agend A quick refresher DFS, BFS, ID-DFS, UCS Unifiction! 2 Serch Problem Formlism Defined vi the following
Lecture 4 Wht re common serch strtegies tht operte given only serch problem? How do they compre? 1 Agend A quick refresher DFS, BFS, ID-DFS, UCS Unifiction! 2 Serch Problem Formlism Defined vi the following
Riemann is the Mann! (But Lebesgue may besgue to differ.)
") Riemnn is the Mnn! (But Lebesgue my besgue to differ.) Leo Livshits My 2, 2008 1 For finite intervls in R We hve seen in clss tht every continuous function f : [, b] R hs the property tht for every ɛ >
Riemnn is the Mnn! (But Lebesgue my besgue to differ.) Leo Livshits My 2, 2008 1 For finite intervls in R We hve seen in clss tht every continuous function f : [, b] R hs the property tht for every ɛ >
Riemann Sums and Riemann Integrals
 Riemnn Sums nd Riemnn Integrls Jmes K. Peterson Deprtment of Biologicl Sciences nd Deprtment of Mthemticl Sciences Clemson University August 26, 2013 Outline 1 Riemnn Sums 2 Riemnn Integrls 3 Properties
Riemnn Sums nd Riemnn Integrls Jmes K. Peterson Deprtment of Biologicl Sciences nd Deprtment of Mthemticl Sciences Clemson University August 26, 2013 Outline 1 Riemnn Sums 2 Riemnn Integrls 3 Properties
Reinforcement Learning and Policy Reuse
 Reinforcement Lerning nd Policy Reue Mnuel M. Veloo PEL Fll 206 Reding: Reinforcement Lerning: An Introduction R. Sutton nd A. Brto Probbilitic policy reue in reinforcement lerning gent Fernndo Fernndez
Reinforcement Lerning nd Policy Reue Mnuel M. Veloo PEL Fll 206 Reding: Reinforcement Lerning: An Introduction R. Sutton nd A. Brto Probbilitic policy reue in reinforcement lerning gent Fernndo Fernndez
Decision Networks. CS 188: Artificial Intelligence. Decision Networks. Decision Networks. Decision Networks and Value of Information
 CS 188: Artificil Intelligence nd Vlue of Informtion Instructors: Dn Klein nd Pieter Abbeel niversity of Cliforni, Berkeley [These slides were creted by Dn Klein nd Pieter Abbeel for CS188 Intro to AI
CS 188: Artificil Intelligence nd Vlue of Informtion Instructors: Dn Klein nd Pieter Abbeel niversity of Cliforni, Berkeley [These slides were creted by Dn Klein nd Pieter Abbeel for CS188 Intro to AI
THE EXISTENCE-UNIQUENESS THEOREM FOR FIRST-ORDER DIFFERENTIAL EQUATIONS.
 THE EXISTENCE-UNIQUENESS THEOREM FOR FIRST-ORDER DIFFERENTIAL EQUATIONS RADON ROSBOROUGH https://intuitiveexplntionscom/picrd-lindelof-theorem/ This document is proof of the existence-uniqueness theorem
THE EXISTENCE-UNIQUENESS THEOREM FOR FIRST-ORDER DIFFERENTIAL EQUATIONS RADON ROSBOROUGH https://intuitiveexplntionscom/picrd-lindelof-theorem/ This document is proof of the existence-uniqueness theorem
The practical version
 Roerto s Notes on Integrl Clculus Chpter 4: Definite integrls nd the FTC Section 7 The Fundmentl Theorem of Clculus: The prcticl version Wht you need to know lredy: The theoreticl version of the FTC. Wht
Roerto s Notes on Integrl Clculus Chpter 4: Definite integrls nd the FTC Section 7 The Fundmentl Theorem of Clculus: The prcticl version Wht you need to know lredy: The theoreticl version of the FTC. Wht
38.2. The Uniform Distribution. Introduction. Prerequisites. Learning Outcomes
 The Uniform Distribution 8. Introduction This Section introduces the simplest type of continuous probbility distribution which fetures continuous rndom vrible X with probbility density function f(x) which
The Uniform Distribution 8. Introduction This Section introduces the simplest type of continuous probbility distribution which fetures continuous rndom vrible X with probbility density function f(x) which
Is there an easy way to find examples of such triples? Why yes! Just look at an ordinary multiplication table to find them!
 PUSHING PYTHAGORAS 009 Jmes Tnton A triple of integers ( bc,, ) is clled Pythgoren triple if exmple, some clssic triples re ( 3,4,5 ), ( 5,1,13 ), ( ) fond of ( 0,1,9 ) nd ( 119,10,169 ). + b = c. For
PUSHING PYTHAGORAS 009 Jmes Tnton A triple of integers ( bc,, ) is clled Pythgoren triple if exmple, some clssic triples re ( 3,4,5 ), ( 5,1,13 ), ( ) fond of ( 0,1,9 ) nd ( 119,10,169 ). + b = c. For
Nondeterminism and Nodeterministic Automata
 Nondeterminism nd Nodeterministic Automt 61 Nondeterminism nd Nondeterministic Automt The computtionl mchine models tht we lerned in the clss re deterministic in the sense tht the next move is uniquely
Nondeterminism nd Nodeterministic Automt 61 Nondeterminism nd Nondeterministic Automt The computtionl mchine models tht we lerned in the clss re deterministic in the sense tht the next move is uniquely
Scalable Learning in Stochastic Games
 Sclble Lerning in Stochstic Gmes Michel Bowling nd Mnuel Veloso Computer Science Deprtment Crnegie Mellon University Pittsburgh PA, 15213-3891 Abstrct Stochstic gmes re generl model of interction between
Sclble Lerning in Stochstic Gmes Michel Bowling nd Mnuel Veloso Computer Science Deprtment Crnegie Mellon University Pittsburgh PA, 15213-3891 Abstrct Stochstic gmes re generl model of interction between
Convert the NFA into DFA
 Convert the NF into F For ech NF we cn find F ccepting the sme lnguge. The numer of sttes of the F could e exponentil in the numer of sttes of the NF, ut in prctice this worst cse occurs rrely. lgorithm:
Convert the NF into F For ech NF we cn find F ccepting the sme lnguge. The numer of sttes of the F could e exponentil in the numer of sttes of the NF, ut in prctice this worst cse occurs rrely. lgorithm:
Joint distribution. Joint distribution. Marginal distributions. Joint distribution
 Joint distribution To specify the joint distribution of n rndom vribles X 1,...,X n tht tke vlues in the smple spces E 1,...,E n we need probbility mesure, P, on E 1... E n = {(x 1,...,x n ) x i E i, i
Joint distribution To specify the joint distribution of n rndom vribles X 1,...,X n tht tke vlues in the smple spces E 1,...,E n we need probbility mesure, P, on E 1... E n = {(x 1,...,x n ) x i E i, i
Finite Automata. Informatics 2A: Lecture 3. John Longley. 22 September School of Informatics University of Edinburgh
 Lnguges nd Automt Finite Automt Informtics 2A: Lecture 3 John Longley School of Informtics University of Edinburgh jrl@inf.ed.c.uk 22 September 2017 1 / 30 Lnguges nd Automt 1 Lnguges nd Automt Wht is
Lnguges nd Automt Finite Automt Informtics 2A: Lecture 3 John Longley School of Informtics University of Edinburgh jrl@inf.ed.c.uk 22 September 2017 1 / 30 Lnguges nd Automt 1 Lnguges nd Automt Wht is
Review of Calculus, cont d
 Jim Lmbers MAT 460 Fll Semester 2009-10 Lecture 3 Notes These notes correspond to Section 1.1 in the text. Review of Clculus, cont d Riemnn Sums nd the Definite Integrl There re mny cses in which some
Jim Lmbers MAT 460 Fll Semester 2009-10 Lecture 3 Notes These notes correspond to Section 1.1 in the text. Review of Clculus, cont d Riemnn Sums nd the Definite Integrl There re mny cses in which some
Section 14.3 Arc Length and Curvature
 Section 4.3 Arc Length nd Curvture Clculus on Curves in Spce In this section, we ly the foundtions for describing the movement of n object in spce.. Vector Function Bsics In Clc, formul for rc length in
Section 4.3 Arc Length nd Curvture Clculus on Curves in Spce In this section, we ly the foundtions for describing the movement of n object in spce.. Vector Function Bsics In Clc, formul for rc length in
dx x x = 1 and + dx α x x α x = + dx α ˆx x x α = α ˆx α as required, in the last equality we used completeness relation +
 Physics 5 Assignment #5 Solutions Due My 5, 009. -Dim Wvefunctions Wvefunctions ψ α nd φp p α re the wvefunctions of some stte α in position-spce nd momentum-spce, or position representtion nd momentum
Physics 5 Assignment #5 Solutions Due My 5, 009. -Dim Wvefunctions Wvefunctions ψ α nd φp p α re the wvefunctions of some stte α in position-spce nd momentum-spce, or position representtion nd momentum
JURONG JUNIOR COLLEGE
 JURONG JUNIOR COLLEGE 2010 JC1 H1 8866 hysics utoril : Dynmics Lerning Outcomes Sub-topic utoril Questions Newton's lws of motion 1 1 st Lw, b, e f 2 nd Lw, including drwing FBDs nd solving problems by
JURONG JUNIOR COLLEGE 2010 JC1 H1 8866 hysics utoril : Dynmics Lerning Outcomes Sub-topic utoril Questions Newton's lws of motion 1 1 st Lw, b, e f 2 nd Lw, including drwing FBDs nd solving problems by
( dg. ) 2 dt. + dt. dt j + dh. + dt. r(t) dt. Comparing this equation with the one listed above for the length of see that
 2 dt. + dt. dt j + dh. + dt. r(t) dt. Comparing this equation with the one listed above for the length of see that") Arc Length of Curves in Three Dimensionl Spce If the vector function r(t) f(t) i + g(t) j + h(t) k trces out the curve C s t vries, we cn mesure distnces long C using formul nerly identicl to one tht we
Arc Length of Curves in Three Dimensionl Spce If the vector function r(t) f(t) i + g(t) j + h(t) k trces out the curve C s t vries, we cn mesure distnces long C using formul nerly identicl to one tht we
Riemann Sums and Riemann Integrals
 Riemnn Sums nd Riemnn Integrls Jmes K. Peterson Deprtment of Biologicl Sciences nd Deprtment of Mthemticl Sciences Clemson University August 26, 203 Outline Riemnn Sums Riemnn Integrls Properties Abstrct
Riemnn Sums nd Riemnn Integrls Jmes K. Peterson Deprtment of Biologicl Sciences nd Deprtment of Mthemticl Sciences Clemson University August 26, 203 Outline Riemnn Sums Riemnn Integrls Properties Abstrct
3.4 Numerical integration
 3.4. Numericl integrtion 63 3.4 Numericl integrtion In mny economic pplictions it is necessry to compute the definite integrl of relvlued function f with respect to "weight" function w over n intervl [,
3.4. Numericl integrtion 63 3.4 Numericl integrtion In mny economic pplictions it is necessry to compute the definite integrl of relvlued function f with respect to "weight" function w over n intervl [,
CM10196 Topic 4: Functions and Relations
 CM096 Topic 4: Functions nd Reltions Guy McCusker W. Functions nd reltions Perhps the most widely used notion in ll of mthemtics is tht of function. Informlly, function is n opertion which tkes n input
CM096 Topic 4: Functions nd Reltions Guy McCusker W. Functions nd reltions Perhps the most widely used notion in ll of mthemtics is tht of function. Informlly, function is n opertion which tkes n input
c n φ n (x), 0 < x < L, (1) n=1
, 0 < x < L, (1) n=1") SECTION : Fourier Series. MATH4. In section 4, we will study method clled Seprtion of Vribles for finding exct solutions to certin clss of prtil differentil equtions (PDEs. To do this, it will be necessry
SECTION : Fourier Series. MATH4. In section 4, we will study method clled Seprtion of Vribles for finding exct solutions to certin clss of prtil differentil equtions (PDEs. To do this, it will be necessry
Topic 1 Notes Jeremy Orloff
 Topic 1 Notes Jerem Orloff 1 Introduction to differentil equtions 1.1 Gols 1. Know the definition of differentil eqution. 2. Know our first nd second most importnt equtions nd their solutions. 3. Be ble
Topic 1 Notes Jerem Orloff 1 Introduction to differentil equtions 1.1 Gols 1. Know the definition of differentil eqution. 2. Know our first nd second most importnt equtions nd their solutions. 3. Be ble
MATH , Calculus 2, Fall 2018
 MATH 36-2, 36-3 Clculus 2, Fll 28 The FUNdmentl Theorem of Clculus Sections 5.4 nd 5.5 This worksheet focuses on the most importnt theorem in clculus. In fct, the Fundmentl Theorem of Clculus (FTC is rgubly
MATH 36-2, 36-3 Clculus 2, Fll 28 The FUNdmentl Theorem of Clculus Sections 5.4 nd 5.5 This worksheet focuses on the most importnt theorem in clculus. In fct, the Fundmentl Theorem of Clculus (FTC is rgubly
EVOLUTION OF INTELLIGENT AGENTS: A NEW APPROACH TO AUTOMATIC PLAN DESIGN. Dániel Kovács László
 EVOLUTION OF INTELLIGENT AGENTS: A NEW APPROACH TO AUTOMATIC PLAN DESIGN Dániel Kovács László Budpest University of Technology nd Economics Deprtment of Mesurement nd Informtion Systems Budpest, H-7, Mgyr
EVOLUTION OF INTELLIGENT AGENTS: A NEW APPROACH TO AUTOMATIC PLAN DESIGN Dániel Kovács László Budpest University of Technology nd Economics Deprtment of Mesurement nd Informtion Systems Budpest, H-7, Mgyr
Continuous Random Variables
 STAT/MATH 395 A - PROBABILITY II UW Winter Qurter 217 Néhémy Lim Continuous Rndom Vribles Nottion. The indictor function of set S is rel-vlued function defined by : { 1 if x S 1 S (x) if x S Suppose tht
STAT/MATH 395 A - PROBABILITY II UW Winter Qurter 217 Néhémy Lim Continuous Rndom Vribles Nottion. The indictor function of set S is rel-vlued function defined by : { 1 if x S 1 S (x) if x S Suppose tht
Pre-Session Review. Part 1: Basic Algebra; Linear Functions and Graphs
 Pre-Session Review Prt 1: Bsic Algebr; Liner Functions nd Grphs A. Generl Review nd Introduction to Algebr Hierrchy of Arithmetic Opertions Opertions in ny expression re performed in the following order:
Pre-Session Review Prt 1: Bsic Algebr; Liner Functions nd Grphs A. Generl Review nd Introduction to Algebr Hierrchy of Arithmetic Opertions Opertions in ny expression re performed in the following order:
Kinematic Waves. These are waves which result from the conservation equation. t + I = 0. (2)
") Introduction Kinemtic Wves These re wves which result from the conservtion eqution E t + I = 0 (1) where E represents sclr density field nd I, its outer flux. The one-dimensionl form of (1) is E t + I
Introduction Kinemtic Wves These re wves which result from the conservtion eqution E t + I = 0 (1) where E represents sclr density field nd I, its outer flux. The one-dimensionl form of (1) is E t + I
Expectation and Variance
 Expecttion nd Vrince : sum of two die rolls P(= P(= = 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12 P(=2) = 1/36 P(=3) = 1/18 P(=4) = 1/12 P(=5) = 1/9 P(=7) = 1/6 P(=13) =? 2 1/36 3 1/18 4 1/12 5 1/9 6 5/36 7 1/6
Expecttion nd Vrince : sum of two die rolls P(= P(= = 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12 P(=2) = 1/36 P(=3) = 1/18 P(=4) = 1/12 P(=5) = 1/9 P(=7) = 1/6 P(=13) =? 2 1/36 3 1/18 4 1/12 5 1/9 6 5/36 7 1/6