Feature Selection & Dynamic Tracking F&P Textbook New: Ch 11, Old: Ch 17 Guido Gerig CS 6320, Spring 2013
|
|
|
- Silvester Gibson
- 5 years ago
- Views:
Transcription
1 Feature Selecton & Dynamc Trackng F&P Textbook New: Ch 11, Old: Ch 17 Gudo Gerg CS 6320, Sprng 2013 Credts: Materal Greg Welch & Gary Bshop, UNC Chapel Hll, some sldes modfed from J.M. Frahm/ M. Pollefeys, and R. Klette Course Materals
2 Materal Feature selecton: SIFT Features Trackng: Kalman Flter: F&P Chapter 17 Greg Welch and Gary Bshop, UNC: Web-ste (electronc and prnted references, book lsts, Java demo, software etc.) Course materal SIGGRAPH:

3 Trackng Rgd Objects

4 Trackng Rgd Objects
5 Trackng Rgd Objects

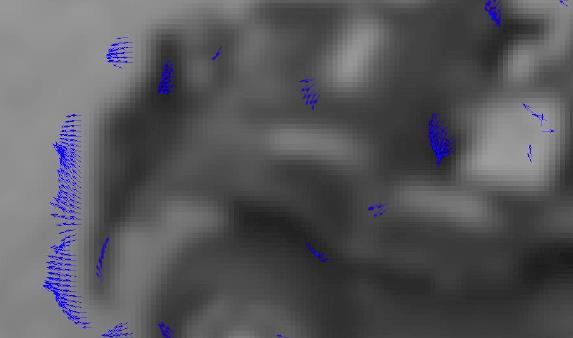
6 Trackng Rgd Objects
7 Feature Trackng Trackng of good features & effcent search for subsequent postons. What are good features? Requred propertes: Well-defned (.e. negborng ponts should all be dfferent) Stable across vews (.e. same 3D pont should be extracted as feature for neghborng vewponts)

8 Lowe s SIFT features (Lowe, ICCV99) SIFT: Scale Invarant Feature Transform Recover features wth change of poston, orentaton and scale




9 SIFT features Scale-space DoG maxma Verfy mnmum contrast and cornerness Orentaton from domnant gradent Descrptor based on gradent dstrbutons
10 Dynamc Feature Trackng Trackng s the problem of generatng an nference about the moton of an object gven a sequence of mages. The key techncal dffculty s mantanng an accurate representaton of the posteror on object poston gven measurements, and dong so effcently.

11
12 Kalman Flter The Kalman flter s a very powerful tool when t comes to controllng nosy systems. Apollo 8 (December 1968), the frst human spaceflght from the Earth to an orbt around the moon, would certanly not have been possble wthout the Kalman flter (see &d=293 ). Applcatons: Trackng Economcs Navgaton Depth and velocty measurements..
13 14 What s t used for? Trackng mssles Trackng heads/hands/drumstcks Extractng lp moton from vdeo Fttng Bezer patches to pont data Lots of computer vson applcatons Economcs Navgaton

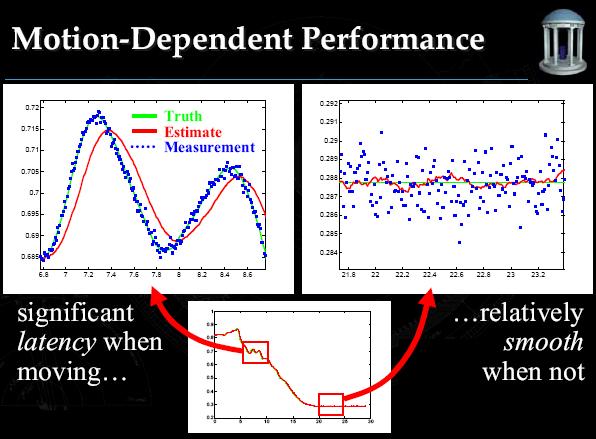
14 Key Concept Nosy process data Estmate average trajectores Smoothng: Sldng wndow for averagng (here sze 64) But: If horzontal axs s tme? We know the past but not the future! Tme-dependent process: Modelng of process tself ncludng nose estmates.
15 Model for trackng Object has nternal state X Captal ndcates random varable Small represents partcular value X x Obtaned measurements n frame are Value of the measurement y Y
16 Lnear Dynamc Models State s lnearly transformed plus Gaussan nose x ~ N D x, 1 d Relevant measures are lnearly obtaned from state plus Gaussan nose y ~ N M Suffcent to mantan mean and standard devaton x, m
17 General Steps of Trackng 1. Predcton: What s the next state of the object gven past measurements P X Y y Y y 0 0,, Data assocaton: Whch measures are relevant for the state? 3. Correcton: Compute representaton of the state from predcton and measurements. P X Y y, Y y Y y 0 0, 1 1,


18 Concept Kalman Flterng predct correct
19 Independence Assumptons Only mmedate past matters P X X X PX X 1,, 1 1 Measurements depend only on current state P Y, Y,, Y X P Y X P Y,, Y X j k j k Important smplfcatons Fortunately t doesn t lmt to much!
20 Sprt of Kalman Flterng: A really smple example We are on a boat at nght and lost our poston We know: star poston
21 Fxed Poston p s poston of boat, v s velocty of boat p p 1 state s X p X D X 1 D I We only measure poston so M I, Y M X X
22 Observer 1 makes a measurement y0, m 0 Condtonal Densty Functon x0 y 0 N ( y 0, m 0 ) 0 m
23 Then: Observer 2 makes a measurement m y1, 1 Condtonal Densty Functon x1? N ( y 1, m 1 ) 1? How does second measurement affect estmate of frst measurement?
24 x K Combne measurements & varances: Kalman 2 x1 K2 2 x ( y ) 1 y y 2 2 Combne Varances (statstcs)
25 Combne measurements & varances: Kalman x x Condtonal Densty Functon N ( x 2, 2 ) Orgnal estmates updated (corrected) n the presence of a new measurement.


26 33 Predct Correct KF operates by 1. Predctng the new state and ts uncertanty 2. Correctng wth the new measurement predct correct
27 34 A really smple example We are on a boat at nght and lost our poston We know: move wth constant velocty star poston
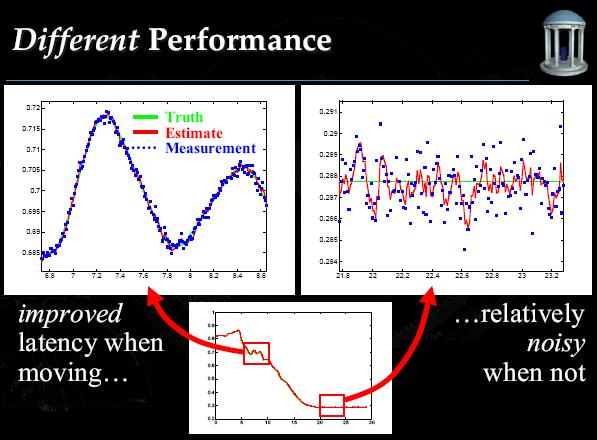
28 35 But suppose we re movng Not all the dfference s error. Some may be moton KF can nclude a moton model Estmate velocty and poston
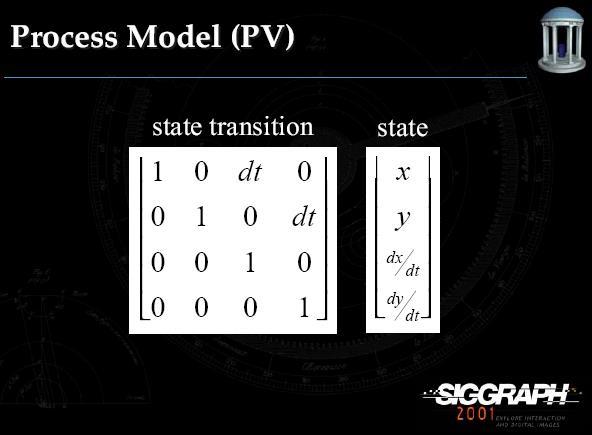
29 36 Process Model Descrbes how the state changes over tme The state for the frst example was scalar The process model was nothng changes A better model mght be constant velocty moton X p v p p v v 1 t 1 ( t) v 1
30 37 Measurement Model What you see from where you are not Where you are from what you see
31 38 Constant Velocty p s poston of boat, v s velocty of boat p p 1 ( t) v 1 state s X [ p v] t X D X 1 D 1 t 0 1 We only measure poston so M t t [1 0], Y [1 0] [ p v] t p


32 Multdmensonal Statstcs To be seen as a generalzaton of the scalar-valued mean and varance to hgher dmensons. 2 varables: Source: Wkpeda
33 40 State and Error Covarance Frst two moments of Gaussan process Process State (Mean) x Error Covarance d



34 41 The Process Model Process dynamcs X D X 1 w State transton Uncertanty over nterval w ~ N 0, d Dffcult to determne

35 42 Measurement Model Measurement relatonshp to state Y M X Measurement matrx Measurement uncertanty ~ N 0, m
36 Predct (Tme Update) X D X 1 D 1 Y M X D T x 1 d x 43 1

37 Measurement Update (Correct) a posteror state and error covarance X X K Y M I K M X Kalman gan Mnmzes posteror error covarance x x 44
38 The Kalman Gan 1 m T T M M M K Weghts between predcton and measurements to posteror error covarance For no measurement uncertanty: 0 m T T M M M M K y M M x y M x x 1 1 State s deduced only from measurement
39 46 The Kalman Gan Smple unvarate (scalar) example m K a posteror state and error covarance x y K x x K 1
40 47 Summary PREDICT CORRECT 1 x D x d T D D 1 x M y K x x M K I 1 m T T M M M K
41 48 Example: Estmatng a Constant The state transton matrx D I x Dx 1 w x 1 w The measurement matrx M I y Mx x Predcton x x 1 1 d
42 49 Measurement Update x x K y x 1 K K m
43 Setup/Intalzaton Generate 50 samples centered around wth standard devaton of 0.1 (var 0.01). d 10 5 x
44 51 State and Measurements m =0.1 2 =0.01 m 0.1 Flter was told the correct measurement varance.
45 52 Error Covarance (ntally 1) ( 2 )
46 State and Measurements m = 1 53 Flter was told that the measurement varance was 100 tmes greater (.e. 1) so t was slower to beleve the measurements.
47 State and Measurements m = = Flter was told that the measurement varance was 100 tmes smaller (.e ) so t was very quck to beleve the nosy measurements.
48 Demonstraton own experments

49

50

51
52
53 2D Poston-Velocty (PV)
54 2D Poston-Velocty (PV)

55 Example: Hand Gesture Recognton and Trackng
56 63 Kalman Flter Web Ste Electronc and prnted references Book lsts and recommendatons Research papers Lnks to other stes Some software News

57 64 Java-Based KF Learnng Tool On-lne 1D smulaton Lnear and non-lnear Varable dynamcs
58 65 KF Course Web Page ( ) Java-Based KF Learnng Tool KF web page
59 66 Relevant References Azarbayejan, Al, and Alex Pentland (1995). Recursve Estmaton of Moton, Structure, and Focal Length, IEEE Trans. Pattern Analyss and Machne Intellgence 17(6): Dellaert, Frank, Sebastan Thrun, and Charles Thorpe (1998). Jacoban Images of Super- Resolved Texture Maps for Model-Based Moton Estmaton and Trackng, IEEE Workshop on Applcatons of Computer Vson (WACV'98), October, Prnceton, NJ, IEEE Computer Socety.
60 Extensons: Partcle Flterng, Condensaton A. Blake, B. Bascle, M. Isard, and J. MacCormck, Statstcal models of vsual shape and moton, n Phl. Trans. R. Soc. A., vol. 356, pp , 1998 B. Isard, M., Blake, and A., Condensaton condtonal densty propagaton for vsual trackng, n Int. J. Computer Vson, vol. 28, no. 1, pp. 5 28, 1998 C. Blake, A., Isard, M.A., Reynard, and D., Learnng to track the vsual moton of contours, n J. Artfcal Intellgence, vol. 78, pp , 1995

61 Condensaton Algorthm (Blake et al. )
62 Extensons: Partcle Flterng, Condensaton
63 Extensons: Partcle Flterng, Condensaton

64 Extensons: Partcle Flterng, Condensaton
Tracking with Kalman Filter
 Trackng wth Kalman Flter Scott T. Acton Vrgna Image and Vdeo Analyss (VIVA), Charles L. Brown Department of Electrcal and Computer Engneerng Department of Bomedcal Engneerng Unversty of Vrgna, Charlottesvlle,
Trackng wth Kalman Flter Scott T. Acton Vrgna Image and Vdeo Analyss (VIVA), Charles L. Brown Department of Electrcal and Computer Engneerng Department of Bomedcal Engneerng Unversty of Vrgna, Charlottesvlle,
STATS 306B: Unsupervised Learning Spring Lecture 10 April 30
 STATS 306B: Unsupervsed Learnng Sprng 2014 Lecture 10 Aprl 30 Lecturer: Lester Mackey Scrbe: Joey Arthur, Rakesh Achanta 10.1 Factor Analyss 10.1.1 Recap Recall the factor analyss (FA) model for lnear
STATS 306B: Unsupervsed Learnng Sprng 2014 Lecture 10 Aprl 30 Lecturer: Lester Mackey Scrbe: Joey Arthur, Rakesh Achanta 10.1 Factor Analyss 10.1.1 Recap Recall the factor analyss (FA) model for lnear
Quantifying Uncertainty
 Partcle Flters Quantfyng Uncertanty Sa Ravela M. I. T Last Updated: Sprng 2013 1 Quantfyng Uncertanty Partcle Flters Partcle Flters Appled to Sequental flterng problems Can also be appled to smoothng problems
Partcle Flters Quantfyng Uncertanty Sa Ravela M. I. T Last Updated: Sprng 2013 1 Quantfyng Uncertanty Partcle Flters Partcle Flters Appled to Sequental flterng problems Can also be appled to smoothng problems
Time-Varying Systems and Computations Lecture 6
 Tme-Varyng Systems and Computatons Lecture 6 Klaus Depold 14. Januar 2014 The Kalman Flter The Kalman estmaton flter attempts to estmate the actual state of an unknown dscrete dynamcal system, gven nosy
Tme-Varyng Systems and Computatons Lecture 6 Klaus Depold 14. Januar 2014 The Kalman Flter The Kalman estmaton flter attempts to estmate the actual state of an unknown dscrete dynamcal system, gven nosy
Composite Hypotheses testing
 Composte ypotheses testng In many hypothess testng problems there are many possble dstrbutons that can occur under each of the hypotheses. The output of the source s a set of parameters (ponts n a parameter
Composte ypotheses testng In many hypothess testng problems there are many possble dstrbutons that can occur under each of the hypotheses. The output of the source s a set of parameters (ponts n a parameter
Uncertainty as the Overlap of Alternate Conditional Distributions
 Uncertanty as the Overlap of Alternate Condtonal Dstrbutons Olena Babak and Clayton V. Deutsch Centre for Computatonal Geostatstcs Department of Cvl & Envronmental Engneerng Unversty of Alberta An mportant
Uncertanty as the Overlap of Alternate Condtonal Dstrbutons Olena Babak and Clayton V. Deutsch Centre for Computatonal Geostatstcs Department of Cvl & Envronmental Engneerng Unversty of Alberta An mportant
Department of Quantitative Methods & Information Systems. Time Series and Their Components QMIS 320. Chapter 6
 Department of Quanttatve Methods & Informaton Systems Tme Seres and Ther Components QMIS 30 Chapter 6 Fall 00 Dr. Mohammad Zanal These sldes were modfed from ther orgnal source for educatonal purpose only.
Department of Quanttatve Methods & Informaton Systems Tme Seres and Ther Components QMIS 30 Chapter 6 Fall 00 Dr. Mohammad Zanal These sldes were modfed from ther orgnal source for educatonal purpose only.
Statistics for Economics & Business
 Statstcs for Economcs & Busness Smple Lnear Regresson Learnng Objectves In ths chapter, you learn: How to use regresson analyss to predct the value of a dependent varable based on an ndependent varable
Statstcs for Economcs & Busness Smple Lnear Regresson Learnng Objectves In ths chapter, you learn: How to use regresson analyss to predct the value of a dependent varable based on an ndependent varable
3.1 Expectation of Functions of Several Random Variables. )' be a k-dimensional discrete or continuous random vector, with joint PMF p (, E X E X1 E X
' be a k-dimensional discrete or continuous random vector, with joint PMF p (, E X E X1 E X") Statstcs 1: Probablty Theory II 37 3 EPECTATION OF SEVERAL RANDOM VARIABLES As n Probablty Theory I, the nterest n most stuatons les not on the actual dstrbuton of a random vector, but rather on a number
Statstcs 1: Probablty Theory II 37 3 EPECTATION OF SEVERAL RANDOM VARIABLES As n Probablty Theory I, the nterest n most stuatons les not on the actual dstrbuton of a random vector, but rather on a number
6 Supplementary Materials
 6 Supplementar Materals 61 Proof of Theorem 31 Proof Let m Xt z 1:T : l m Xt X,z 1:t Wethenhave mxt z1:t ˆm HX Xt z 1:T mxt z1:t m HX Xt z 1:T + mxt z 1:T HX We consder each of the two terms n equaton
6 Supplementar Materals 61 Proof of Theorem 31 Proof Let m Xt z 1:T : l m Xt X,z 1:t Wethenhave mxt z1:t ˆm HX Xt z 1:T mxt z1:t m HX Xt z 1:T + mxt z 1:T HX We consder each of the two terms n equaton
Natural Images, Gaussian Mixtures and Dead Leaves Supplementary Material
 Natural Images, Gaussan Mxtures and Dead Leaves Supplementary Materal Danel Zoran Interdscplnary Center for Neural Computaton Hebrew Unversty of Jerusalem Israel http://www.cs.huj.ac.l/ danez Yar Wess
Natural Images, Gaussan Mxtures and Dead Leaves Supplementary Materal Danel Zoran Interdscplnary Center for Neural Computaton Hebrew Unversty of Jerusalem Israel http://www.cs.huj.ac.l/ danez Yar Wess
Discussion of Extensions of the Gauss-Markov Theorem to the Case of Stochastic Regression Coefficients Ed Stanek
 Dscusson of Extensons of the Gauss-arkov Theorem to the Case of Stochastc Regresson Coeffcents Ed Stanek Introducton Pfeffermann (984 dscusses extensons to the Gauss-arkov Theorem n settngs where regresson
Dscusson of Extensons of the Gauss-arkov Theorem to the Case of Stochastc Regresson Coeffcents Ed Stanek Introducton Pfeffermann (984 dscusses extensons to the Gauss-arkov Theorem n settngs where regresson
Mathematical Preparations
 1 Introducton Mathematcal Preparatons The theory of relatvty was developed to explan experments whch studed the propagaton of electromagnetc radaton n movng coordnate systems. Wthn expermental error the
1 Introducton Mathematcal Preparatons The theory of relatvty was developed to explan experments whch studed the propagaton of electromagnetc radaton n movng coordnate systems. Wthn expermental error the
Linear Feature Engineering 11
 Lnear Feature Engneerng 11 2 Least-Squares 2.1 Smple least-squares Consder the followng dataset. We have a bunch of nputs x and correspondng outputs y. The partcular values n ths dataset are x y 0.23 0.19
Lnear Feature Engneerng 11 2 Least-Squares 2.1 Smple least-squares Consder the followng dataset. We have a bunch of nputs x and correspondng outputs y. The partcular values n ths dataset are x y 0.23 0.19
THE Kalman filter (KF) rooted in the state-space formulation
 rooted in the state-space formulation") Proceedngs of Internatonal Jont Conference on Neural Networks, San Jose, Calforna, USA, July 31 August 5, 211 Extended Kalman Flter Usng a Kernel Recursve Least Squares Observer Pngpng Zhu, Badong Chen,
Proceedngs of Internatonal Jont Conference on Neural Networks, San Jose, Calforna, USA, July 31 August 5, 211 Extended Kalman Flter Usng a Kernel Recursve Least Squares Observer Pngpng Zhu, Badong Chen,
Introduction to Regression
 Introducton to Regresson Dr Tom Ilvento Department of Food and Resource Economcs Overvew The last part of the course wll focus on Regresson Analyss Ths s one of the more powerful statstcal technques Provdes
Introducton to Regresson Dr Tom Ilvento Department of Food and Resource Economcs Overvew The last part of the course wll focus on Regresson Analyss Ths s one of the more powerful statstcal technques Provdes
Chapter 3. Two-Variable Regression Model: The Problem of Estimation
 Chapter 3. Two-Varable Regresson Model: The Problem of Estmaton Ordnary Least Squares Method (OLS) Recall that, PRF: Y = β 1 + β X + u Thus, snce PRF s not drectly observable, t s estmated by SRF; that
Chapter 3. Two-Varable Regresson Model: The Problem of Estmaton Ordnary Least Squares Method (OLS) Recall that, PRF: Y = β 1 + β X + u Thus, snce PRF s not drectly observable, t s estmated by SRF; that
Feature Selection: Part 1
 CSE 546: Machne Learnng Lecture 5 Feature Selecton: Part 1 Instructor: Sham Kakade 1 Regresson n the hgh dmensonal settng How do we learn when the number of features d s greater than the sample sze n?
CSE 546: Machne Learnng Lecture 5 Feature Selecton: Part 1 Instructor: Sham Kakade 1 Regresson n the hgh dmensonal settng How do we learn when the number of features d s greater than the sample sze n?
1. Inference on Regression Parameters a. Finding Mean, s.d and covariance amongst estimates. 2. Confidence Intervals and Working Hotelling Bands
 Content. Inference on Regresson Parameters a. Fndng Mean, s.d and covarance amongst estmates.. Confdence Intervals and Workng Hotellng Bands 3. Cochran s Theorem 4. General Lnear Testng 5. Measures of
Content. Inference on Regresson Parameters a. Fndng Mean, s.d and covarance amongst estmates.. Confdence Intervals and Workng Hotellng Bands 3. Cochran s Theorem 4. General Lnear Testng 5. Measures of
Chapter 11: Simple Linear Regression and Correlation
 Chapter 11: Smple Lnear Regresson and Correlaton 11-1 Emprcal Models 11-2 Smple Lnear Regresson 11-3 Propertes of the Least Squares Estmators 11-4 Hypothess Test n Smple Lnear Regresson 11-4.1 Use of t-tests
Chapter 11: Smple Lnear Regresson and Correlaton 11-1 Emprcal Models 11-2 Smple Lnear Regresson 11-3 Propertes of the Least Squares Estmators 11-4 Hypothess Test n Smple Lnear Regresson 11-4.1 Use of t-tests
4DVAR, according to the name, is a four-dimensional variational method.
 4D-Varatonal Data Assmlaton (4D-Var) 4DVAR, accordng to the name, s a four-dmensonal varatonal method. 4D-Var s actually a drect generalzaton of 3D-Var to handle observatons that are dstrbuted n tme. The
4D-Varatonal Data Assmlaton (4D-Var) 4DVAR, accordng to the name, s a four-dmensonal varatonal method. 4D-Var s actually a drect generalzaton of 3D-Var to handle observatons that are dstrbuted n tme. The
Probability Theory (revisited)
") Probablty Theory (revsted) Summary Probablty v.s. plausblty Random varables Smulaton of Random Experments Challenge The alarm of a shop rang. Soon afterwards, a man was seen runnng n the street, persecuted
Probablty Theory (revsted) Summary Probablty v.s. plausblty Random varables Smulaton of Random Experments Challenge The alarm of a shop rang. Soon afterwards, a man was seen runnng n the street, persecuted
Support Vector Machines. Vibhav Gogate The University of Texas at dallas
 Support Vector Machnes Vbhav Gogate he Unversty of exas at dallas What We have Learned So Far? 1. Decson rees. Naïve Bayes 3. Lnear Regresson 4. Logstc Regresson 5. Perceptron 6. Neural networks 7. K-Nearest
Support Vector Machnes Vbhav Gogate he Unversty of exas at dallas What We have Learned So Far? 1. Decson rees. Naïve Bayes 3. Lnear Regresson 4. Logstc Regresson 5. Perceptron 6. Neural networks 7. K-Nearest
ADVANCED MACHINE LEARNING ADVANCED MACHINE LEARNING
 1 ADVANCED ACHINE LEARNING ADVANCED ACHINE LEARNING Non-lnear regresson technques 2 ADVANCED ACHINE LEARNING Regresson: Prncple N ap N-dm. nput x to a contnuous output y. Learn a functon of the type: N
1 ADVANCED ACHINE LEARNING ADVANCED ACHINE LEARNING Non-lnear regresson technques 2 ADVANCED ACHINE LEARNING Regresson: Prncple N ap N-dm. nput x to a contnuous output y. Learn a functon of the type: N
Inner Product. Euclidean Space. Orthonormal Basis. Orthogonal
 Inner Product Defnton 1 () A Eucldean space s a fnte-dmensonal vector space over the reals R, wth an nner product,. Defnton 2 (Inner Product) An nner product, on a real vector space X s a symmetrc, blnear,
Inner Product Defnton 1 () A Eucldean space s a fnte-dmensonal vector space over the reals R, wth an nner product,. Defnton 2 (Inner Product) An nner product, on a real vector space X s a symmetrc, blnear,
CSci 6974 and ECSE 6966 Math. Tech. for Vision, Graphics and Robotics Lecture 21, April 17, 2006 Estimating A Plane Homography
 CSc 6974 and ECSE 6966 Math. Tech. for Vson, Graphcs and Robotcs Lecture 21, Aprl 17, 2006 Estmatng A Plane Homography Overvew We contnue wth a dscusson of the major ssues, usng estmaton of plane projectve
CSc 6974 and ECSE 6966 Math. Tech. for Vson, Graphcs and Robotcs Lecture 21, Aprl 17, 2006 Estmatng A Plane Homography Overvew We contnue wth a dscusson of the major ssues, usng estmaton of plane projectve
Impulse Noise Removal Technique Based on Fuzzy Logic
 Impulse Nose Removal Technque Based on Fuzzy Logc 1 Mthlesh Atulkar, 2 A.S. Zadgaonkar and 3 Sanjay Kumar C V Raman Unversty, Kota, Blaspur, Inda 1 m.atulkar@gmal.com, 2 arunzad28@hotmal.com, 3 sanrapur@redffmal.com
Impulse Nose Removal Technque Based on Fuzzy Logc 1 Mthlesh Atulkar, 2 A.S. Zadgaonkar and 3 Sanjay Kumar C V Raman Unversty, Kota, Blaspur, Inda 1 m.atulkar@gmal.com, 2 arunzad28@hotmal.com, 3 sanrapur@redffmal.com
BACKGROUND SUBTRACTION WITH EIGEN BACKGROUND METHODS USING MATLAB
 BACKGROUND SUBTRACTION WITH EIGEN BACKGROUND METHODS USING MATLAB 1 Ilmyat Sar 2 Nola Marna 1 Pusat Stud Komputas Matematka, Unverstas Gunadarma e-mal: lmyat@staff.gunadarma.ac.d 2 Pusat Stud Komputas
BACKGROUND SUBTRACTION WITH EIGEN BACKGROUND METHODS USING MATLAB 1 Ilmyat Sar 2 Nola Marna 1 Pusat Stud Komputas Matematka, Unverstas Gunadarma e-mal: lmyat@staff.gunadarma.ac.d 2 Pusat Stud Komputas
Chapter 9: Statistical Inference and the Relationship between Two Variables
 Chapter 9: Statstcal Inference and the Relatonshp between Two Varables Key Words The Regresson Model The Sample Regresson Equaton The Pearson Correlaton Coeffcent Learnng Outcomes After studyng ths chapter,
Chapter 9: Statstcal Inference and the Relatonshp between Two Varables Key Words The Regresson Model The Sample Regresson Equaton The Pearson Correlaton Coeffcent Learnng Outcomes After studyng ths chapter,
JAB Chain. Long-tail claims development. ASTIN - September 2005 B.Verdier A. Klinger
 JAB Chan Long-tal clams development ASTIN - September 2005 B.Verder A. Klnger Outlne Chan Ladder : comments A frst soluton: Munch Chan Ladder JAB Chan Chan Ladder: Comments Black lne: average pad to ncurred
JAB Chan Long-tal clams development ASTIN - September 2005 B.Verder A. Klnger Outlne Chan Ladder : comments A frst soluton: Munch Chan Ladder JAB Chan Chan Ladder: Comments Black lne: average pad to ncurred
Econ107 Applied Econometrics Topic 3: Classical Model (Studenmund, Chapter 4)
") I. Classcal Assumptons Econ7 Appled Econometrcs Topc 3: Classcal Model (Studenmund, Chapter 4) We have defned OLS and studed some algebrac propertes of OLS. In ths topc we wll study statstcal propertes
I. Classcal Assumptons Econ7 Appled Econometrcs Topc 3: Classcal Model (Studenmund, Chapter 4) We have defned OLS and studed some algebrac propertes of OLS. In ths topc we wll study statstcal propertes
ECONOMICS 351*-A Mid-Term Exam -- Fall Term 2000 Page 1 of 13 pages. QUEEN'S UNIVERSITY AT KINGSTON Department of Economics
 ECOOMICS 35*-A Md-Term Exam -- Fall Term 000 Page of 3 pages QUEE'S UIVERSITY AT KIGSTO Department of Economcs ECOOMICS 35* - Secton A Introductory Econometrcs Fall Term 000 MID-TERM EAM ASWERS MG Abbott
ECOOMICS 35*-A Md-Term Exam -- Fall Term 000 Page of 3 pages QUEE'S UIVERSITY AT KIGSTO Department of Economcs ECOOMICS 35* - Secton A Introductory Econometrcs Fall Term 000 MID-TERM EAM ASWERS MG Abbott
Statistics Spring MIT Department of Nuclear Engineering
 Statstcs.04 Sprng 00.04 S00 Statstcs/Probablty Analyss of eperments Measurement error Measurement process systematc vs. random errors Nose propertes of sgnals and mages quantum lmted mages.04 S00 Probablty
Statstcs.04 Sprng 00.04 S00 Statstcs/Probablty Analyss of eperments Measurement error Measurement process systematc vs. random errors Nose propertes of sgnals and mages quantum lmted mages.04 S00 Probablty
Week3, Chapter 4. Position and Displacement. Motion in Two Dimensions. Instantaneous Velocity. Average Velocity
 Week3, Chapter 4 Moton n Two Dmensons Lecture Quz A partcle confned to moton along the x axs moves wth constant acceleraton from x =.0 m to x = 8.0 m durng a 1-s tme nterval. The velocty of the partcle
Week3, Chapter 4 Moton n Two Dmensons Lecture Quz A partcle confned to moton along the x axs moves wth constant acceleraton from x =.0 m to x = 8.0 m durng a 1-s tme nterval. The velocty of the partcle
2016 Wiley. Study Session 2: Ethical and Professional Standards Application
 6 Wley Study Sesson : Ethcal and Professonal Standards Applcaton LESSON : CORRECTION ANALYSIS Readng 9: Correlaton and Regresson LOS 9a: Calculate and nterpret a sample covarance and a sample correlaton
6 Wley Study Sesson : Ethcal and Professonal Standards Applcaton LESSON : CORRECTION ANALYSIS Readng 9: Correlaton and Regresson LOS 9a: Calculate and nterpret a sample covarance and a sample correlaton
Parameter Estimation for Dynamic System using Unscented Kalman filter
 Parameter Estmaton for Dynamc System usng Unscented Kalman flter Jhoon Seung 1,a, Amr Atya F. 2,b, Alexander G.Parlos 3,c, and Klto Chong 1,4,d* 1 Dvson of Electroncs Engneerng, Chonbuk Natonal Unversty,
Parameter Estmaton for Dynamc System usng Unscented Kalman flter Jhoon Seung 1,a, Amr Atya F. 2,b, Alexander G.Parlos 3,c, and Klto Chong 1,4,d* 1 Dvson of Electroncs Engneerng, Chonbuk Natonal Unversty,
Expectation Maximization Mixture Models HMMs
 -755 Machne Learnng for Sgnal Processng Mture Models HMMs Class 9. 2 Sep 200 Learnng Dstrbutons for Data Problem: Gven a collecton of eamples from some data, estmate ts dstrbuton Basc deas of Mamum Lelhood
-755 Machne Learnng for Sgnal Processng Mture Models HMMs Class 9. 2 Sep 200 Learnng Dstrbutons for Data Problem: Gven a collecton of eamples from some data, estmate ts dstrbuton Basc deas of Mamum Lelhood
Radar Trackers. Study Guide. All chapters, problems, examples and page numbers refer to Applied Optimal Estimation, A. Gelb, Ed.
 Radar rackers Study Gude All chapters, problems, examples and page numbers refer to Appled Optmal Estmaton, A. Gelb, Ed. Chapter Example.0- Problem Statement wo sensors Each has a sngle nose measurement
Radar rackers Study Gude All chapters, problems, examples and page numbers refer to Appled Optmal Estmaton, A. Gelb, Ed. Chapter Example.0- Problem Statement wo sensors Each has a sngle nose measurement
CIS526: Machine Learning Lecture 3 (Sept 16, 2003) Linear Regression. Preparation help: Xiaoying Huang. x 1 θ 1 output... θ M x M
 Linear Regression. Preparation help: Xiaoying Huang. x 1 θ 1 output... θ M x M") CIS56: achne Learnng Lecture 3 (Sept 6, 003) Preparaton help: Xaoyng Huang Lnear Regresson Lnear regresson can be represented by a functonal form: f(; θ) = θ 0 0 +θ + + θ = θ = 0 ote: 0 s a dummy attrbute
CIS56: achne Learnng Lecture 3 (Sept 6, 003) Preparaton help: Xaoyng Huang Lnear Regresson Lnear regresson can be represented by a functonal form: f(; θ) = θ 0 0 +θ + + θ = θ = 0 ote: 0 s a dummy attrbute
Hidden Markov Models & The Multivariate Gaussian (10/26/04)
") CS281A/Stat241A: Statstcal Learnng Theory Hdden Markov Models & The Multvarate Gaussan (10/26/04) Lecturer: Mchael I. Jordan Scrbes: Jonathan W. Hu 1 Hdden Markov Models As a bref revew, hdden Markov models
CS281A/Stat241A: Statstcal Learnng Theory Hdden Markov Models & The Multvarate Gaussan (10/26/04) Lecturer: Mchael I. Jordan Scrbes: Jonathan W. Hu 1 Hdden Markov Models As a bref revew, hdden Markov models
j) = 1 (note sigma notation) ii. Continuous random variable (e.g. Normal distribution) 1. density function: f ( x) 0 and f ( x) dx = 1
 = 1 (note sigma notation) ii. Continuous random variable (e.g. Normal distribution) 1. density function: f ( x) 0 and f ( x) dx = 1") Random varables Measure of central tendences and varablty (means and varances) Jont densty functons and ndependence Measures of assocaton (covarance and correlaton) Interestng result Condtonal dstrbutons
Random varables Measure of central tendences and varablty (means and varances) Jont densty functons and ndependence Measures of assocaton (covarance and correlaton) Interestng result Condtonal dstrbutons
MLE and Bayesian Estimation. Jie Tang Department of Computer Science & Technology Tsinghua University 2012
 MLE and Bayesan Estmaton Je Tang Department of Computer Scence & Technology Tsnghua Unversty 01 1 Lnear Regresson? As the frst step, we need to decde how we re gong to represent the functon f. One example:
MLE and Bayesan Estmaton Je Tang Department of Computer Scence & Technology Tsnghua Unversty 01 1 Lnear Regresson? As the frst step, we need to decde how we re gong to represent the functon f. One example:
Comparison of Regression Lines
 STATGRAPHICS Rev. 9/13/2013 Comparson of Regresson Lnes Summary... 1 Data Input... 3 Analyss Summary... 4 Plot of Ftted Model... 6 Condtonal Sums of Squares... 6 Analyss Optons... 7 Forecasts... 8 Confdence
STATGRAPHICS Rev. 9/13/2013 Comparson of Regresson Lnes Summary... 1 Data Input... 3 Analyss Summary... 4 Plot of Ftted Model... 6 Condtonal Sums of Squares... 6 Analyss Optons... 7 Forecasts... 8 Confdence
8 : Learning in Fully Observed Markov Networks. 1 Why We Need to Learn Undirected Graphical Models. 2 Structural Learning for Completely Observed MRF
 10-708: Probablstc Graphcal Models 10-708, Sprng 2014 8 : Learnng n Fully Observed Markov Networks Lecturer: Erc P. Xng Scrbes: Meng Song, L Zhou 1 Why We Need to Learn Undrected Graphcal Models In the
10-708: Probablstc Graphcal Models 10-708, Sprng 2014 8 : Learnng n Fully Observed Markov Networks Lecturer: Erc P. Xng Scrbes: Meng Song, L Zhou 1 Why We Need to Learn Undrected Graphcal Models In the
4 Analysis of Variance (ANOVA) 5 ANOVA. 5.1 Introduction. 5.2 Fixed Effects ANOVA
 5 ANOVA. 5.1 Introduction. 5.2 Fixed Effects ANOVA") 4 Analyss of Varance (ANOVA) 5 ANOVA 51 Introducton ANOVA ANOVA s a way to estmate and test the means of multple populatons We wll start wth one-way ANOVA If the populatons ncluded n the study are selected
4 Analyss of Varance (ANOVA) 5 ANOVA 51 Introducton ANOVA ANOVA s a way to estmate and test the means of multple populatons We wll start wth one-way ANOVA If the populatons ncluded n the study are selected
A Particle Filter Algorithm based on Mixing of Prior probability density and UKF as Generate Importance Function
 Advanced Scence and Technology Letters, pp.83-87 http://dx.do.org/10.14257/astl.2014.53.20 A Partcle Flter Algorthm based on Mxng of Pror probablty densty and UKF as Generate Importance Functon Lu Lu 1,1,
Advanced Scence and Technology Letters, pp.83-87 http://dx.do.org/10.14257/astl.2014.53.20 A Partcle Flter Algorthm based on Mxng of Pror probablty densty and UKF as Generate Importance Functon Lu Lu 1,1,
AN IMPROVED PARTICLE FILTER ALGORITHM BASED ON NEURAL NETWORK FOR TARGET TRACKING
 AN IMPROVED PARTICLE FILTER ALGORITHM BASED ON NEURAL NETWORK FOR TARGET TRACKING Qn Wen, Peng Qcong 40 Lab, Insttuton of Communcaton and Informaton Engneerng,Unversty of Electronc Scence and Technology
AN IMPROVED PARTICLE FILTER ALGORITHM BASED ON NEURAL NETWORK FOR TARGET TRACKING Qn Wen, Peng Qcong 40 Lab, Insttuton of Communcaton and Informaton Engneerng,Unversty of Electronc Scence and Technology
Negative Binomial Regression
 STATGRAPHICS Rev. 9/16/2013 Negatve Bnomal Regresson Summary... 1 Data Input... 3 Statstcal Model... 3 Analyss Summary... 4 Analyss Optons... 7 Plot of Ftted Model... 8 Observed Versus Predcted... 10 Predctons...
STATGRAPHICS Rev. 9/16/2013 Negatve Bnomal Regresson Summary... 1 Data Input... 3 Statstcal Model... 3 Analyss Summary... 4 Analyss Optons... 7 Plot of Ftted Model... 8 Observed Versus Predcted... 10 Predctons...
P R. Lecture 4. Theory and Applications of Pattern Recognition. Dept. of Electrical and Computer Engineering /
 Theory and Applcatons of Pattern Recognton 003, Rob Polkar, Rowan Unversty, Glassboro, NJ Lecture 4 Bayes Classfcaton Rule Dept. of Electrcal and Computer Engneerng 0909.40.0 / 0909.504.04 Theory & Applcatons
Theory and Applcatons of Pattern Recognton 003, Rob Polkar, Rowan Unversty, Glassboro, NJ Lecture 4 Bayes Classfcaton Rule Dept. of Electrcal and Computer Engneerng 0909.40.0 / 0909.504.04 Theory & Applcatons
Computation of Higher Order Moments from Two Multinomial Overdispersion Likelihood Models
 Computaton of Hgher Order Moments from Two Multnomal Overdsperson Lkelhood Models BY J. T. NEWCOMER, N. K. NEERCHAL Department of Mathematcs and Statstcs, Unversty of Maryland, Baltmore County, Baltmore,
Computaton of Hgher Order Moments from Two Multnomal Overdsperson Lkelhood Models BY J. T. NEWCOMER, N. K. NEERCHAL Department of Mathematcs and Statstcs, Unversty of Maryland, Baltmore County, Baltmore,
Estimating the Fundamental Matrix by Transforming Image Points in Projective Space 1
 Estmatng the Fundamental Matrx by Transformng Image Ponts n Projectve Space 1 Zhengyou Zhang and Charles Loop Mcrosoft Research, One Mcrosoft Way, Redmond, WA 98052, USA E-mal: fzhang,cloopg@mcrosoft.com
Estmatng the Fundamental Matrx by Transformng Image Ponts n Projectve Space 1 Zhengyou Zhang and Charles Loop Mcrosoft Research, One Mcrosoft Way, Redmond, WA 98052, USA E-mal: fzhang,cloopg@mcrosoft.com
Chapter 13: Multiple Regression
 Chapter 13: Multple Regresson 13.1 Developng the multple-regresson Model The general model can be descrbed as: It smplfes for two ndependent varables: The sample ft parameter b 0, b 1, and b are used to
Chapter 13: Multple Regresson 13.1 Developng the multple-regresson Model The general model can be descrbed as: It smplfes for two ndependent varables: The sample ft parameter b 0, b 1, and b are used to
IV. Performance Optimization
 IV. Performance Optmzaton A. Steepest descent algorthm defnton how to set up bounds on learnng rate mnmzaton n a lne (varyng learnng rate) momentum learnng examples B. Newton s method defnton Gauss-Newton
IV. Performance Optmzaton A. Steepest descent algorthm defnton how to set up bounds on learnng rate mnmzaton n a lne (varyng learnng rate) momentum learnng examples B. Newton s method defnton Gauss-Newton
Statistics Chapter 4
 Statstcs Chapter 4 "There are three knds of les: les, damned les, and statstcs." Benjamn Dsrael, 1895 (Brtsh statesman) Gaussan Dstrbuton, 4-1 If a measurement s repeated many tmes a statstcal treatment
Statstcs Chapter 4 "There are three knds of les: les, damned les, and statstcs." Benjamn Dsrael, 1895 (Brtsh statesman) Gaussan Dstrbuton, 4-1 If a measurement s repeated many tmes a statstcal treatment
Properties of Least Squares
 Week 3 3.1 Smple Lnear Regresson Model 3. Propertes of Least Squares Estmators Y Y β 1 + β X + u weekly famly expendtures X weekly famly ncome For a gven level of x, the expected level of food expendtures
Week 3 3.1 Smple Lnear Regresson Model 3. Propertes of Least Squares Estmators Y Y β 1 + β X + u weekly famly expendtures X weekly famly ncome For a gven level of x, the expected level of food expendtures
STATISTICAL MECHANICS
 STATISTICAL MECHANICS Thermal Energy Recall that KE can always be separated nto 2 terms: KE system = 1 2 M 2 total v CM KE nternal Rgd-body rotaton and elastc / sound waves Use smplfyng assumptons KE of
STATISTICAL MECHANICS Thermal Energy Recall that KE can always be separated nto 2 terms: KE system = 1 2 M 2 total v CM KE nternal Rgd-body rotaton and elastc / sound waves Use smplfyng assumptons KE of
ONE DIMENSIONAL TRIANGULAR FIN EXPERIMENT. Technical Advisor: Dr. D.C. Look, Jr. Version: 11/03/00
 ONE IMENSIONAL TRIANGULAR FIN EXPERIMENT Techncal Advsor: r..c. Look, Jr. Verson: /3/ 7. GENERAL OJECTIVES a) To understand a one-dmensonal epermental appromaton. b) To understand the art of epermental
ONE IMENSIONAL TRIANGULAR FIN EXPERIMENT Techncal Advsor: r..c. Look, Jr. Verson: /3/ 7. GENERAL OJECTIVES a) To understand a one-dmensonal epermental appromaton. b) To understand the art of epermental
CS 3710: Visual Recognition Classification and Detection. Adriana Kovashka Department of Computer Science January 13, 2015
 CS 3710: Vsual Recognton Classfcaton and Detecton Adrana Kovashka Department of Computer Scence January 13, 2015 Plan for Today Vsual recognton bascs part 2: Classfcaton and detecton Adrana s research
CS 3710: Vsual Recognton Classfcaton and Detecton Adrana Kovashka Department of Computer Scence January 13, 2015 Plan for Today Vsual recognton bascs part 2: Classfcaton and detecton Adrana s research
The Multiple Classical Linear Regression Model (CLRM): Specification and Assumptions. 1. Introduction
: Specification and Assumptions. 1. Introduction") ECONOMICS 5* -- NOTE (Summary) ECON 5* -- NOTE The Multple Classcal Lnear Regresson Model (CLRM): Specfcaton and Assumptons. Introducton CLRM stands for the Classcal Lnear Regresson Model. The CLRM s also
ECONOMICS 5* -- NOTE (Summary) ECON 5* -- NOTE The Multple Classcal Lnear Regresson Model (CLRM): Specfcaton and Assumptons. Introducton CLRM stands for the Classcal Lnear Regresson Model. The CLRM s also
Chapter 2 - The Simple Linear Regression Model S =0. e i is a random error. S β2 β. This is a minimization problem. Solution is a calculus exercise.
 Chapter - The Smple Lnear Regresson Model The lnear regresson equaton s: where y + = β + β e for =,..., y and are observable varables e s a random error How can an estmaton rule be constructed for the
Chapter - The Smple Lnear Regresson Model The lnear regresson equaton s: where y + = β + β e for =,..., y and are observable varables e s a random error How can an estmaton rule be constructed for the
Convergence of random processes
 DS-GA 12 Lecture notes 6 Fall 216 Convergence of random processes 1 Introducton In these notes we study convergence of dscrete random processes. Ths allows to characterze phenomena such as the law of large
DS-GA 12 Lecture notes 6 Fall 216 Convergence of random processes 1 Introducton In these notes we study convergence of dscrete random processes. Ths allows to characterze phenomena such as the law of large
Psychology 282 Lecture #24 Outline Regression Diagnostics: Outliers
 Psychology 282 Lecture #24 Outlne Regresson Dagnostcs: Outlers In an earler lecture we studed the statstcal assumptons underlyng the regresson model, ncludng the followng ponts: Formal statement of assumptons.
Psychology 282 Lecture #24 Outlne Regresson Dagnostcs: Outlers In an earler lecture we studed the statstcal assumptons underlyng the regresson model, ncludng the followng ponts: Formal statement of assumptons.
This column is a continuation of our previous column
 Comparson of Goodness of Ft Statstcs for Lnear Regresson, Part II The authors contnue ther dscusson of the correlaton coeffcent n developng a calbraton for quanttatve analyss. Jerome Workman Jr. and Howard
Comparson of Goodness of Ft Statstcs for Lnear Regresson, Part II The authors contnue ther dscusson of the correlaton coeffcent n developng a calbraton for quanttatve analyss. Jerome Workman Jr. and Howard
e i is a random error
 Chapter - The Smple Lnear Regresson Model The lnear regresson equaton s: where + β + β e for,..., and are observable varables e s a random error How can an estmaton rule be constructed for the unknown
Chapter - The Smple Lnear Regresson Model The lnear regresson equaton s: where + β + β e for,..., and are observable varables e s a random error How can an estmaton rule be constructed for the unknown
Linear Approximation with Regularization and Moving Least Squares
 Lnear Approxmaton wth Regularzaton and Movng Least Squares Igor Grešovn May 007 Revson 4.6 (Revson : March 004). 5 4 3 0.5 3 3.5 4 Contents: Lnear Fttng...4. Weghted Least Squares n Functon Approxmaton...
Lnear Approxmaton wth Regularzaton and Movng Least Squares Igor Grešovn May 007 Revson 4.6 (Revson : March 004). 5 4 3 0.5 3 3.5 4 Contents: Lnear Fttng...4. Weghted Least Squares n Functon Approxmaton...
Classification as a Regression Problem
 Target varable y C C, C,, ; Classfcaton as a Regresson Problem { }, 3 L C K To treat classfcaton as a regresson problem we should transform the target y nto numercal values; The choce of numercal class
Target varable y C C, C,, ; Classfcaton as a Regresson Problem { }, 3 L C K To treat classfcaton as a regresson problem we should transform the target y nto numercal values; The choce of numercal class
Kinematics of Fluids. Lecture 16. (Refer the text book CONTINUUM MECHANICS by GEORGE E. MASE, Schaum s Outlines) 17/02/2017
 17/02/2017") 17/0/017 Lecture 16 (Refer the text boo CONTINUUM MECHANICS by GEORGE E. MASE, Schaum s Outlnes) Knematcs of Fluds Last class, we started dscussng about the nematcs of fluds. Recall the Lagrangan and Euleran
17/0/017 Lecture 16 (Refer the text boo CONTINUUM MECHANICS by GEORGE E. MASE, Schaum s Outlnes) Knematcs of Fluds Last class, we started dscussng about the nematcs of fluds. Recall the Lagrangan and Euleran
Lecture 3 Stat102, Spring 2007
 Lecture 3 Stat0, Sprng 007 Chapter 3. 3.: Introducton to regresson analyss Lnear regresson as a descrptve technque The least-squares equatons Chapter 3.3 Samplng dstrbuton of b 0, b. Contnued n net lecture
Lecture 3 Stat0, Sprng 007 Chapter 3. 3.: Introducton to regresson analyss Lnear regresson as a descrptve technque The least-squares equatons Chapter 3.3 Samplng dstrbuton of b 0, b. Contnued n net lecture
Module 3 LOSSY IMAGE COMPRESSION SYSTEMS. Version 2 ECE IIT, Kharagpur
 Module 3 LOSSY IMAGE COMPRESSION SYSTEMS Verson ECE IIT, Kharagpur Lesson 6 Theory of Quantzaton Verson ECE IIT, Kharagpur Instructonal Objectves At the end of ths lesson, the students should be able to:
Module 3 LOSSY IMAGE COMPRESSION SYSTEMS Verson ECE IIT, Kharagpur Lesson 6 Theory of Quantzaton Verson ECE IIT, Kharagpur Instructonal Objectves At the end of ths lesson, the students should be able to:
Motion Perception Under Uncertainty. Hongjing Lu Department of Psychology University of Hong Kong
 Moton Percepton Under Uncertanty Hongjng Lu Department of Psychology Unversty of Hong Kong Outlne Uncertanty n moton stmulus Correspondence problem Qualtatve fttng usng deal observer models Based on sgnal
Moton Percepton Under Uncertanty Hongjng Lu Department of Psychology Unversty of Hong Kong Outlne Uncertanty n moton stmulus Correspondence problem Qualtatve fttng usng deal observer models Based on sgnal
Statistics for Managers Using Microsoft Excel/SPSS Chapter 13 The Simple Linear Regression Model and Correlation
 Statstcs for Managers Usng Mcrosoft Excel/SPSS Chapter 13 The Smple Lnear Regresson Model and Correlaton 1999 Prentce-Hall, Inc. Chap. 13-1 Chapter Topcs Types of Regresson Models Determnng the Smple Lnear
Statstcs for Managers Usng Mcrosoft Excel/SPSS Chapter 13 The Smple Lnear Regresson Model and Correlaton 1999 Prentce-Hall, Inc. Chap. 13-1 Chapter Topcs Types of Regresson Models Determnng the Smple Lnear
Hidden Markov Models
 CM229S: Machne Learnng for Bonformatcs Lecture 12-05/05/2016 Hdden Markov Models Lecturer: Srram Sankararaman Scrbe: Akshay Dattatray Shnde Edted by: TBD 1 Introducton For a drected graph G we can wrte
CM229S: Machne Learnng for Bonformatcs Lecture 12-05/05/2016 Hdden Markov Models Lecturer: Srram Sankararaman Scrbe: Akshay Dattatray Shnde Edted by: TBD 1 Introducton For a drected graph G we can wrte
The Gaussian classifier. Nuno Vasconcelos ECE Department, UCSD
 he Gaussan classfer Nuno Vasconcelos ECE Department, UCSD Bayesan decson theory recall that we have state of the world X observatons g decson functon L[g,y] loss of predctng y wth g Bayes decson rule s
he Gaussan classfer Nuno Vasconcelos ECE Department, UCSD Bayesan decson theory recall that we have state of the world X observatons g decson functon L[g,y] loss of predctng y wth g Bayes decson rule s
Chapter 15 - Multiple Regression
 Chapter - Multple Regresson Chapter - Multple Regresson Multple Regresson Model The equaton that descrbes how the dependent varable y s related to the ndependent varables x, x,... x p and an error term
Chapter - Multple Regresson Chapter - Multple Regresson Multple Regresson Model The equaton that descrbes how the dependent varable y s related to the ndependent varables x, x,... x p and an error term
Automatic Object Trajectory- Based Motion Recognition Using Gaussian Mixture Models
 Automatc Object Trajectory- Based Moton Recognton Usng Gaussan Mxture Models Fasal I. Bashr, Ashfaq A. Khokhar, Dan Schonfeld Electrcal and Computer Engneerng, Unversty of Illnos at Chcago. Chcago, IL,
Automatc Object Trajectory- Based Moton Recognton Usng Gaussan Mxture Models Fasal I. Bashr, Ashfaq A. Khokhar, Dan Schonfeld Electrcal and Computer Engneerng, Unversty of Illnos at Chcago. Chcago, IL,
The Ordinary Least Squares (OLS) Estimator
 Estimator") The Ordnary Least Squares (OLS) Estmator 1 Regresson Analyss Regresson Analyss: a statstcal technque for nvestgatng and modelng the relatonshp between varables. Applcatons: Engneerng, the physcal and chemcal
The Ordnary Least Squares (OLS) Estmator 1 Regresson Analyss Regresson Analyss: a statstcal technque for nvestgatng and modelng the relatonshp between varables. Applcatons: Engneerng, the physcal and chemcal
Fourier Transform. Additive noise. Fourier Tansform. I = S + N. Noise doesn t depend on signal. We ll consider:
 Flterng Announcements HW2 wll be posted later today Constructng a mosac by warpng mages. CSE252A Lecture 10a Flterng Exampel: Smoothng by Averagng Kernel: (From Bll Freeman) m=2 I Kernel sze s m+1 by m+1
Flterng Announcements HW2 wll be posted later today Constructng a mosac by warpng mages. CSE252A Lecture 10a Flterng Exampel: Smoothng by Averagng Kernel: (From Bll Freeman) m=2 I Kernel sze s m+1 by m+1
β0 + β1xi and want to estimate the unknown
 SLR Models Estmaton Those OLS Estmates Estmators (e ante) v. estmates (e post) The Smple Lnear Regresson (SLR) Condtons -4 An Asde: The Populaton Regresson Functon B and B are Lnear Estmators (condtonal
SLR Models Estmaton Those OLS Estmates Estmators (e ante) v. estmates (e post) The Smple Lnear Regresson (SLR) Condtons -4 An Asde: The Populaton Regresson Functon B and B are Lnear Estmators (condtonal
EEE 241: Linear Systems
 EEE : Lnear Systems Summary #: Backpropagaton BACKPROPAGATION The perceptron rule as well as the Wdrow Hoff learnng were desgned to tran sngle layer networks. They suffer from the same dsadvantage: they
EEE : Lnear Systems Summary #: Backpropagaton BACKPROPAGATION The perceptron rule as well as the Wdrow Hoff learnng were desgned to tran sngle layer networks. They suffer from the same dsadvantage: they
Invariant deformation parameters from GPS permanent networks using stochastic interpolation
 Invarant deformaton parameters from GPS permanent networks usng stochastc nterpolaton Ludovco Bag, Poltecnco d Mlano, DIIAR Athanasos Dermans, Arstotle Unversty of Thessalonk Outlne Startng hypotheses
Invarant deformaton parameters from GPS permanent networks usng stochastc nterpolaton Ludovco Bag, Poltecnco d Mlano, DIIAR Athanasos Dermans, Arstotle Unversty of Thessalonk Outlne Startng hypotheses
Linear regression. Regression Models. Chapter 11 Student Lecture Notes Regression Analysis is the
 Chapter 11 Student Lecture Notes 11-1 Lnear regresson Wenl lu Dept. Health statstcs School of publc health Tanjn medcal unversty 1 Regresson Models 1. Answer What Is the Relatonshp Between the Varables?.
Chapter 11 Student Lecture Notes 11-1 Lnear regresson Wenl lu Dept. Health statstcs School of publc health Tanjn medcal unversty 1 Regresson Models 1. Answer What Is the Relatonshp Between the Varables?.
Outline. Multivariate Parametric Methods. Multivariate Data. Basic Multivariate Statistics. Steven J Zeil
 Outlne Multvarate Parametrc Methods Steven J Zel Old Domnon Unv. Fall 2010 1 Multvarate Data 2 Multvarate ormal Dstrbuton 3 Multvarate Classfcaton Dscrmnants Tunng Complexty Dscrete Features 4 Multvarate
Outlne Multvarate Parametrc Methods Steven J Zel Old Domnon Unv. Fall 2010 1 Multvarate Data 2 Multvarate ormal Dstrbuton 3 Multvarate Classfcaton Dscrmnants Tunng Complexty Dscrete Features 4 Multvarate
Parametric fractional imputation for missing data analysis. Jae Kwang Kim Survey Working Group Seminar March 29, 2010
 Parametrc fractonal mputaton for mssng data analyss Jae Kwang Km Survey Workng Group Semnar March 29, 2010 1 Outlne Introducton Proposed method Fractonal mputaton Approxmaton Varance estmaton Multple mputaton
Parametrc fractonal mputaton for mssng data analyss Jae Kwang Km Survey Workng Group Semnar March 29, 2010 1 Outlne Introducton Proposed method Fractonal mputaton Approxmaton Varance estmaton Multple mputaton
Chapter 8 Indicator Variables
 Chapter 8 Indcator Varables In general, e explanatory varables n any regresson analyss are assumed to be quanttatve n nature. For example, e varables lke temperature, dstance, age etc. are quanttatve n
Chapter 8 Indcator Varables In general, e explanatory varables n any regresson analyss are assumed to be quanttatve n nature. For example, e varables lke temperature, dstance, age etc. are quanttatve n
Using T.O.M to Estimate Parameter of distributions that have not Single Exponential Family
 IOSR Journal of Mathematcs IOSR-JM) ISSN: 2278-5728. Volume 3, Issue 3 Sep-Oct. 202), PP 44-48 www.osrjournals.org Usng T.O.M to Estmate Parameter of dstrbutons that have not Sngle Exponental Famly Jubran
IOSR Journal of Mathematcs IOSR-JM) ISSN: 2278-5728. Volume 3, Issue 3 Sep-Oct. 202), PP 44-48 www.osrjournals.org Usng T.O.M to Estmate Parameter of dstrbutons that have not Sngle Exponental Famly Jubran
β0 + β1xi. You are interested in estimating the unknown parameters β
 Ordnary Least Squares (OLS): Smple Lnear Regresson (SLR) Analytcs The SLR Setup Sample Statstcs Ordnary Least Squares (OLS): FOCs and SOCs Back to OLS and Sample Statstcs Predctons (and Resduals) wth OLS
Ordnary Least Squares (OLS): Smple Lnear Regresson (SLR) Analytcs The SLR Setup Sample Statstcs Ordnary Least Squares (OLS): FOCs and SOCs Back to OLS and Sample Statstcs Predctons (and Resduals) wth OLS
Conjugacy and the Exponential Family
 CS281B/Stat241B: Advanced Topcs n Learnng & Decson Makng Conjugacy and the Exponental Famly Lecturer: Mchael I. Jordan Scrbes: Bran Mlch 1 Conjugacy In the prevous lecture, we saw conjugate prors for the
CS281B/Stat241B: Advanced Topcs n Learnng & Decson Makng Conjugacy and the Exponental Famly Lecturer: Mchael I. Jordan Scrbes: Bran Mlch 1 Conjugacy In the prevous lecture, we saw conjugate prors for the
PHYS 450 Spring semester Lecture 02: Dealing with Experimental Uncertainties. Ron Reifenberger Birck Nanotechnology Center Purdue University
 PHYS 45 Sprng semester 7 Lecture : Dealng wth Expermental Uncertantes Ron Refenberger Brck anotechnology Center Purdue Unversty Lecture Introductory Comments Expermental errors (really expermental uncertantes)
PHYS 45 Sprng semester 7 Lecture : Dealng wth Expermental Uncertantes Ron Refenberger Brck anotechnology Center Purdue Unversty Lecture Introductory Comments Expermental errors (really expermental uncertantes)
Let the Shape Speak - Discriminative Face Alignment using Conjugate Priors
 Let the Shape Speak - Dscrmnatve Face Algnment usng Conjugate Prors Pedro Martns, Ru Casero, João F. Henrques, Jorge Batsta http://www.sr.uc.pt/~pedromartns Insttute of Systems and Robotcs Unversty of
Let the Shape Speak - Dscrmnatve Face Algnment usng Conjugate Prors Pedro Martns, Ru Casero, João F. Henrques, Jorge Batsta http://www.sr.uc.pt/~pedromartns Insttute of Systems and Robotcs Unversty of
Kernel Methods and SVMs Extension
 Kernel Methods and SVMs Extenson The purpose of ths document s to revew materal covered n Machne Learnng 1 Supervsed Learnng regardng support vector machnes (SVMs). Ths document also provdes a general
Kernel Methods and SVMs Extenson The purpose of ths document s to revew materal covered n Machne Learnng 1 Supervsed Learnng regardng support vector machnes (SVMs). Ths document also provdes a general
Economics 130. Lecture 4 Simple Linear Regression Continued
 Economcs 130 Lecture 4 Contnued Readngs for Week 4 Text, Chapter and 3. We contnue wth addressng our second ssue + add n how we evaluate these relatonshps: Where do we get data to do ths analyss? How do
Economcs 130 Lecture 4 Contnued Readngs for Week 4 Text, Chapter and 3. We contnue wth addressng our second ssue + add n how we evaluate these relatonshps: Where do we get data to do ths analyss? How do
Which Separator? Spring 1
 Whch Separator? 6.034 - Sprng 1 Whch Separator? Mamze the margn to closest ponts 6.034 - Sprng Whch Separator? Mamze the margn to closest ponts 6.034 - Sprng 3 Margn of a pont " # y (w $ + b) proportonal
Whch Separator? 6.034 - Sprng 1 Whch Separator? Mamze the margn to closest ponts 6.034 - Sprng Whch Separator? Mamze the margn to closest ponts 6.034 - Sprng 3 Margn of a pont " # y (w $ + b) proportonal
Lecture Notes on Linear Regression
 Lecture Notes on Lnear Regresson Feng L fl@sdueducn Shandong Unversty, Chna Lnear Regresson Problem In regresson problem, we am at predct a contnuous target value gven an nput feature vector We assume
Lecture Notes on Lnear Regresson Feng L fl@sdueducn Shandong Unversty, Chna Lnear Regresson Problem In regresson problem, we am at predct a contnuous target value gven an nput feature vector We assume
A quantum-statistical-mechanical extension of Gaussian mixture model
 A quantum-statstcal-mechancal extenson of Gaussan mxture model Kazuyuk Tanaka, and Koj Tsuda 2 Graduate School of Informaton Scences, Tohoku Unversty, 6-3-09 Aramak-aza-aoba, Aoba-ku, Senda 980-8579, Japan
A quantum-statstcal-mechancal extenson of Gaussan mxture model Kazuyuk Tanaka, and Koj Tsuda 2 Graduate School of Informaton Scences, Tohoku Unversty, 6-3-09 Aramak-aza-aoba, Aoba-ku, Senda 980-8579, Japan
Statistical analysis using matlab. HY 439 Presented by: George Fortetsanakis
 Statstcal analyss usng matlab HY 439 Presented by: George Fortetsanaks Roadmap Probablty dstrbutons Statstcal estmaton Fttng data to probablty dstrbutons Contnuous dstrbutons Contnuous random varable X
Statstcal analyss usng matlab HY 439 Presented by: George Fortetsanaks Roadmap Probablty dstrbutons Statstcal estmaton Fttng data to probablty dstrbutons Contnuous dstrbutons Contnuous random varable X
Lecture 10 Support Vector Machines II
 Lecture 10 Support Vector Machnes II 22 February 2016 Taylor B. Arnold Yale Statstcs STAT 365/665 1/28 Notes: Problem 3 s posted and due ths upcomng Frday There was an early bug n the fake-test data; fxed
Lecture 10 Support Vector Machnes II 22 February 2016 Taylor B. Arnold Yale Statstcs STAT 365/665 1/28 Notes: Problem 3 s posted and due ths upcomng Frday There was an early bug n the fake-test data; fxed
Feb 14: Spatial analysis of data fields
 Feb 4: Spatal analyss of data felds Mappng rregularly sampled data onto a regular grd Many analyss technques for geophyscal data requre the data be located at regular ntervals n space and/or tme. hs s
Feb 4: Spatal analyss of data felds Mappng rregularly sampled data onto a regular grd Many analyss technques for geophyscal data requre the data be located at regular ntervals n space and/or tme. hs s
Basic Business Statistics, 10/e
 Chapter 13 13-1 Basc Busness Statstcs 11 th Edton Chapter 13 Smple Lnear Regresson Basc Busness Statstcs, 11e 009 Prentce-Hall, Inc. Chap 13-1 Learnng Objectves In ths chapter, you learn: How to use regresson
Chapter 13 13-1 Basc Busness Statstcs 11 th Edton Chapter 13 Smple Lnear Regresson Basc Busness Statstcs, 11e 009 Prentce-Hall, Inc. Chap 13-1 Learnng Objectves In ths chapter, you learn: How to use regresson
Robert Eisberg Second edition CH 09 Multielectron atoms ground states and x-ray excitations
 Quantum Physcs 量 理 Robert Esberg Second edton CH 09 Multelectron atoms ground states and x-ray exctatons 9-01 By gong through the procedure ndcated n the text, develop the tme-ndependent Schroednger equaton
Quantum Physcs 量 理 Robert Esberg Second edton CH 09 Multelectron atoms ground states and x-ray exctatons 9-01 By gong through the procedure ndcated n the text, develop the tme-ndependent Schroednger equaton
x i1 =1 for all i (the constant ).
.") Chapter 5 The Multple Regresson Model Consder an economc model where the dependent varable s a functon of K explanatory varables. The economc model has the form: y = f ( x,x,..., ) xk Approxmate ths by
Chapter 5 The Multple Regresson Model Consder an economc model where the dependent varable s a functon of K explanatory varables. The economc model has the form: y = f ( x,x,..., ) xk Approxmate ths by