Terramechanics V MARYLAND U N I V E R S I T Y O F. Terramechanics V. ENAE 788X - Planetary Surface Robotics
|
|
|
- Barnard Fisher
- 5 years ago
- Views:
Transcription
1 Terramechanics V Note - I haven t posted the slides from Tuesday because there were a number of typos (and outright mistakes) that were (almost) all corrected on Thursday. This set of slides are the corrected slides from both Tuesday and Thursday in the appropriate order to make a full set of slides on terramechanics. I know this is late (and I apologize for that), so if you would like extra time on the problem set, take it with no penalty. I d rather you understand and do it right than worry about grades at this point. U N I V E R S I T Y O F MARYLAND 1 Terramechanics V ENAE 788X - Planetary Surface Robotics
2 LRV Three-View and Dimensions U N I V E R S I T Y O F MARYLAND 2 Terramechanics V ENAE 788X - Planetary Surface Robotics
3 Location of LRV Center of Gravity U N I V E R S I T Y O F MARYLAND 3 Terramechanics V ENAE 788X - Planetary Surface Robotics
4 Rover Climbing/Descending Slope ` h T 2 N 2 mg a T 1 r N 1 h a ` r T 1 N 1 mg T 2 N 2 U N I V E R S I T Y O F MARYLAND 4 Terramechanics V ENAE 788X - Planetary Surface Robotics
5 Static Equilibrium Conditions X Forces? to surface X Forces k to surface N 1 + N 2 = mg cos T 1 + T 2 = mg sin X Torques about rear axle T 1 r + T 2 r + N 1` = mg [(` a) cos h sin ] Friction forces proportional to force into surface U N I V E R S I T Y O F MARYLAND T 1 = T 2 N 1 N 2 Four equations, four unknowns 5 Terramechanics V ENAE 788X - Planetary Surface Robotics
6 Static Equilibrium Solutions apple a h N 1 = mg 1 cos ` ` + r` sin apple a h N 2 = mg ` cos + ` + r` sin T 2 = T 1 = N 2 N 1 + N 2 mg sin N 1 N 1 + N 2 mg sin U N I V E R S I T Y O F MARYLAND 6 Terramechanics V ENAE 788X - Planetary Surface Robotics
7 Loaded LRV Weight Distribution r N 1 a h ` N T 2 1 mg T 2 m = 690 kg mg = 1120 N ` = cm r = 40.6 cm a = cm U N I V E R S I T Y O F MARYLAND 7 h = 50.8 cm N 1 = N 2 = N b = 22.9 cm Terramechanics V ENAE 788X - Planetary Surface Robotics
8 Normal and Shear Wheel Force w/slope 0.9" 0.8" 0.7" 0.6" 0.5" 0.4" 0.3" 0.2" 0.1" 0" N 1 mg N 2 mg 0" 10" 20" 30" 40" 50" 60" N1" N2" T1" T2" T 2 mg N 2 mg U N I V E R S I T Y O F MARYLAND 8 Terramechanics V ENAE 788X - Planetary Surface Robotics
9 Longitudinal Dynamic Conditions X Forces? to surface X Forces k to surface N 1 + N 2 = mg cos T 1 + T 2 = mg sin + ma x X Torques about rear axle T 1 r + T 2 r + N 1` = mg [(` a) cos h sin ] Friction forces proportional to force into surface U N I V E R S I T Y O F MARYLAND T 1 = T 2 N 1 N 2 Four equations, four unknowns 9 Terramechanics V ENAE 788X - Planetary Surface Robotics
10 Longitudinal Dynamic Solutions N 1 = mg apple 1 N 2 = mg a ` cos apple a ` cos + h ` + r` sin h ` + r` sin + a x g a x g T 2 = T 1 = N 2 N 1 + N 2 (mg sin + ma x ) N 1 N 1 + N 2 (mg sin + ma x ) U N I V E R S I T Y O F MARYLAND 10 Terramechanics V ENAE 788X - Planetary Surface Robotics
11 Overturn Limits 1 a ` cos limit h` + r` sin limit = a x g 1 For the static case (a x = 0) a h cos limit = ` ` + r` sin limit U N I V E R S I T Y O F MARYLAND tan limit = 1 a ` h ` + r` 11 = ` a h + r Limiting accel on flat ground a x,limit = g 1 a ` Terramechanics V ENAE 788X - Planetary Surface Robotics
12 Limiting Slope Under Acceleration Maximum'Slope'(deg)' 60" 50" 40" 30" 20" 10" 0" limit 0" 0.1" 0.2" 0.3" 0.4" 0.5" 0.6" Accelera4on' a x g U N I V E R S I T Y O F MARYLAND 12 Terramechanics V ENAE 788X - Planetary Surface Robotics
13 Compression Resistance (Lunar Soil) R c = 1 n + 1 (k c + bk ) 1 2n+1 n = 1 3W w (3 n) d 2(n+1) 2n+1 k c =0.14 N/cm 2 k =0.827 N/cm 3 R c = 1 2 (k c + bk ) 1 3 3W w 2 d 4 3 R c = N/wheel = N (total) U N I V E R S I T Y O F MARYLAND 13 Terramechanics V ENAE 788X - Planetary Surface Robotics
14 Lunar Regolith Soil Properties Symbol Description Value Used in n Exponent of sinkage 1.0 EVERYTHING k Cohesive modulus of soil deformation 1400 N/m Rc, Rb, H k Frictional modulus of soil deformation 820,000 N/m Rc, Rb, H θ Slope angle Rg Cf Coefficient of friction 0.05 Rr γ Soil density 1.6 g/cm Rb Co Cohesive strength of soil N/cm H ф Angle of internal friction degrees Rb K Coefficient of soil Slip 1.8 cm H s slip H U N I V E R S I T Y O F MARYLAND 14 Terramechanics V ENAE 788X - Planetary Surface Robotics
15 Equations for Compression Resistance z = U N I V E R S I T Y O F MARYLAND apple 3W w (3 n)bk p d W w = weight on wheel d = wheel diameter bk R c = n + 1 z n+1 R c = compression resistance (per wheel) n+1 Correction - Page 25 of L03 (Corrected ) Terramechanics V ENAE 788X - Planetary Surface Robotics
16 LRV Sinkage in Lunar Regolith z = " 3W w 2(k c + bk ) p d z =1.812 cm # 2 3 Back wheel is a tandem wheel W w = 2 3 (k c + bk ) p dz 2 3 U N I V E R S I T Y O F MARYLAND 16 Terramechanics V ENAE 788X - Planetary Surface Robotics
17 Tandem Wheels, n=1 N i = 2 3 (k c + bk ) p d p z i z i 1 (2z i z i 1 ) We already calculated z 1 =1.812 cm N 2 = 2 3 (k c + bk ) p d p z 2 z 1 (2z 2 z 1 Solve for z 2 (numerically would be easiest) z 2 =2.443 cm This is the total depth for wheel 2 U N I V E R S I T Y O F MARYLAND 17 Terramechanics V ENAE 788X - Planetary Surface Robotics
18 Compaction Resistance, n=1 R c = 1 2 (k c + bk )z 2 R c = N (per side) =) R c = N U N I V E R S I T Y O F MARYLAND 18 Terramechanics V ENAE 788X - Planetary Surface Robotics
19 Or, You Could Cheat Approximation formulas for n=1 Two wheels in tandem R c = (k c + bk )z 2 Three wheels in tandem R c = (k c + bk )z 2 z is the sinkage depth of the front wheel in both cases R g, R f are straightforward U N I V E R S I T Y O F MARYLAND 19 Terramechanics V ENAE 788X - Planetary Surface Robotics
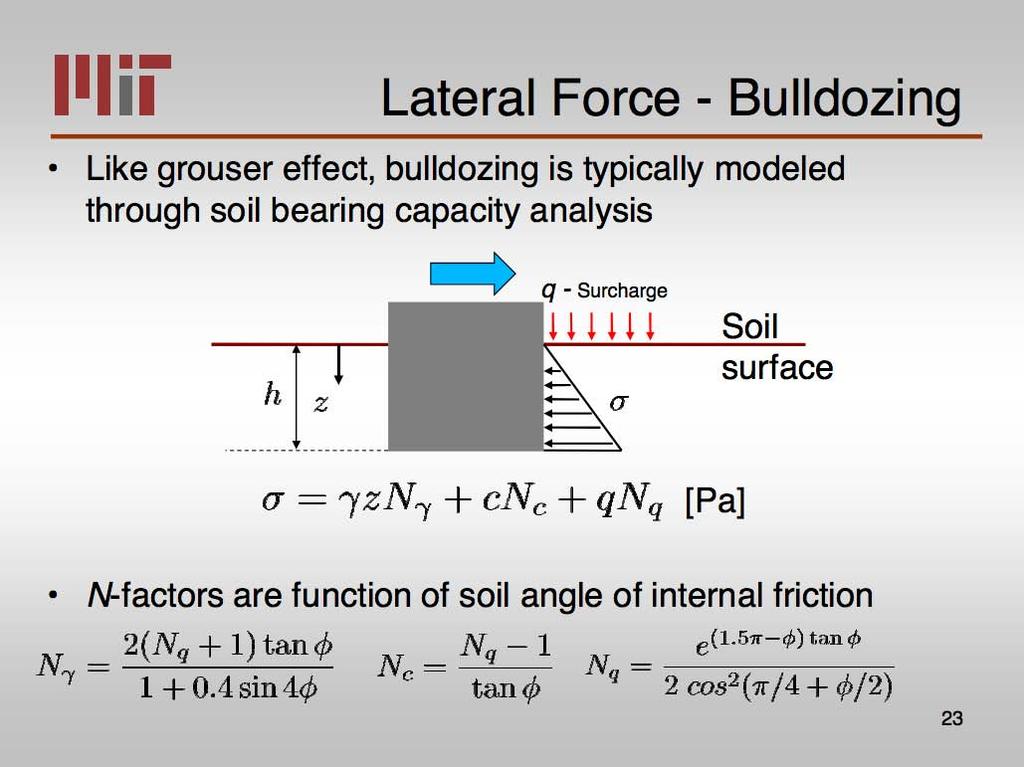
20 Bulldozing Resistance General case: R b = b sin ( + ) 2sin cos 2zcK c + z 2 K +`3o 3 2 All angles in radians! + c`2o apple 1 + tan For tracked vehicles, only the first term applies: R b = U N I V E R S I T Y O F MARYLAND `o = z tan `o soil disruption depth, and is not the same as contact length ` b sin ( + ) 2sin cos 20 2zcK c + z 2 K Terramechanics V ENAE 788X - Planetary Surface Robotics
21 Bulldozing Resistance (Rb) Symbol Description Value Angle of internal friction γ Soil density 1.6 gm N/cm Co Cohesive strength of soil Lo (degrees) Kc (degrees) K (degrees) Distance of rupture Modulus of cohesion of soil deformation Modulus of density of soil deformation degrees for Lunar Regolith Nc (radians) Coefficient of passive earth pressure α (degrees) U N I V E R S I T Y O F MARYLAND Angle of approach of the wheel 21 Terramechanics V ENAE 788X - Planetary Surface Robotics
22 Bulldozing Example (1) = cos 1 1 2z d = 33 o =0.576 rad = cos 1 1 `o = z 1 tan (1.812) 81.2 = o = rad = N q = U N I V E R S I T Y O F MARYLAND e(1.5 )tan 2 cos N c = N q 1 tan 22 = = Corrected Terramechanics V ENAE 788X - Planetary Surface Robotics
23 Bulldozing Example (2) N = 2(N q + 1) tan 1+0.4sin4 = K c =(N c tan ) cos 2 = N K = tan +1 cos 2 = ` = d 1 2 cos 1 2z = cm d = N cm 3 ; c o =0.017 N cm 2 U N I V E R S I T Y O F MARYLAND 23 Terramechanics V ENAE 788X - Planetary Surface Robotics

24 Terzhagi Parameters Red lines represent values calculated for this example U N I V E R S I T Y O F MARYLAND 24 Terramechanics V ENAE 788X - Planetary Surface Robotics
25 Bulldozing Example (3) R b = b sin ( + ) 2sin cos R b i = cm cm 2zcK c + +`3o N cm z 2 K 2 N cm 3 cm2 + c`2o apple 1 + tan cm 3 N cm 3 + N cm 2 cm2 R b = = N per leading wheel R b,total = N U N I V E R S I T Y O F MARYLAND 25 Terramechanics V ENAE 788X - Planetary Surface Robotics
26 Tractive Force per Wheel (No Grousers) H =[AC b + W w tan b ] A = area of contact = b` C b = coe cient of soil/wheel cohesion K = coe U N I V E R S I T Y O F MARYLAND b = wheel/soil friction angle s = wheel slip ratio cient of soil slip = length of contact patch 26 1 K H (s=0) = N 1 e s K Terramechanics V ENAE 788X - Planetary Surface Robotics
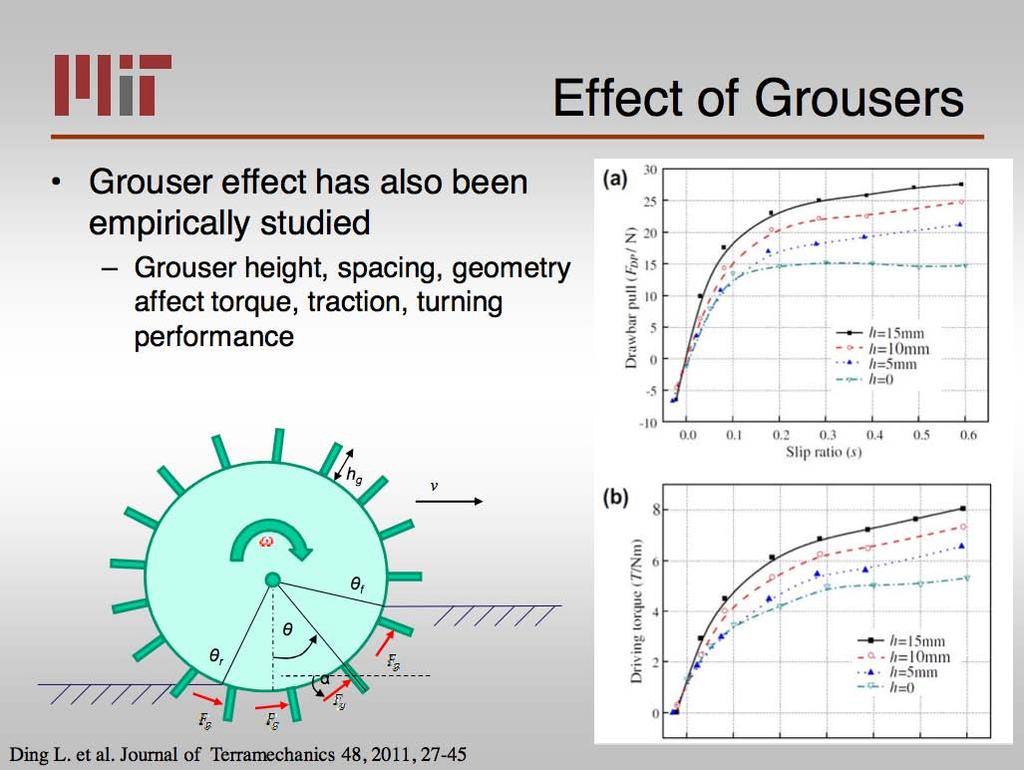
27 Tractive Force per Wheel (With Grousers) H = b C b 1 + 2h b N g + W tan b h b arctan b 1 h K s 1 e K A = area of contact = b C b = soil/wheel cohesion = N/cm 2 b = wheel/soil friction angle = 35 s = wheel slip ratio (typ ) K = coe cient of soil slip = 1.8 cm = length of contact patch = D 2 cos 1 1 h = height of grouser U N I V E R S I T Y O F MARYLAND All values typical for lunar soil 27 2z D Terramechanics V ENAE 788X - Planetary Surface Robotics
28 Effect of Soil Thrust Fraction 1.2 Soil Thrust Fraction 1 K 1 e s K Soil Thrust Fraction K/l= Slip Ratio U N I V E R S I T Y O F MARYLAND 28 Terramechanics V ENAE 788X - Planetary Surface Robotics
29 Basic Equation of Vehicle Propulsion DP = H (R c + R b + R g + R r ) DP: Drawbar pull (residual drive force) H: Maximum tractive force of wheels R c : Compaction resistance R b : Bulldozing resistance R g : Gravitational resistance R r : Rolling resistance (internal) U N I V E R S I T Y O F MARYLAND 29 Terramechanics V ENAE 788X - Planetary Surface Robotics
30
31
32

33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61

62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79 Terramechanics References Bekker, M.G, Introduction to Terrain-Vehicle Systems, Ann Arbor, University of Michigan, 1969 Terzaghi, Theoretical Soil Mechanics, 1943 Wong, J.Y. Theory of Ground Vehicles 2 nd Edition, Canada U N I V E R S I T Y O F MARYLAND 79 Terramechanics V ENAE 788X - Planetary Surface Robotics
Terramechanics MARYLAND. Overview of wheel-soil interactions Sources of rolling resistance on soil Rover propulsion analysis U N I V E R S I T Y O F
 Overview of wheel-soil interactions Sources of rolling resistance on soil Rover propulsion analysis 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Soil Mechanics Wheel rolling over
Overview of wheel-soil interactions Sources of rolling resistance on soil Rover propulsion analysis 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Soil Mechanics Wheel rolling over
Terramechanics. Origin and nature of lunar soil Soil mechanics Wheel-soil interactions Tandem wheel calculations Grousers MARYLAND
 Terramechanics Origin and nature of lunar soil Soil mechanics Wheel-soil interactions Tandem wheel calculations Grousers 1 16 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar Regolith
Terramechanics Origin and nature of lunar soil Soil mechanics Wheel-soil interactions Tandem wheel calculations Grousers 1 16 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar Regolith
Terramechanics. Origin and nature of lunar soil Soil mechanics Rigid wheel mechanics MARYLAND U N I V E R S I T Y O F
 Terramechanics Origin and nature of lunar soil Soil mechanics Rigid wheel mechanics 1 2010 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar Regolith Broken down from larger pieces
Terramechanics Origin and nature of lunar soil Soil mechanics Rigid wheel mechanics 1 2010 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar Regolith Broken down from larger pieces
Terramechanics. Origin and nature of lunar soil Soil mechanics Rigid wheel mechanics MARYLAND U N I V E R S I T Y O F.
 Origin and nature of lunar soil Soil mechanics Rigid wheel mechanics 1 2012 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Notes about Revised Course Schedule No class next week (9/11
Origin and nature of lunar soil Soil mechanics Rigid wheel mechanics 1 2012 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Notes about Revised Course Schedule No class next week (9/11
Surface Interaction Modeling Engineering Methods. Karl Iagnemma, Ph.D. Massachusetts Institute of Technology
 Surface Interaction Modeling Engineering Methods Karl Iagnemma, Ph.D. Massachusetts Institute of Technology 1 Terramechanics Terramechanics Engineering science that studies the interaction between vehicles
Surface Interaction Modeling Engineering Methods Karl Iagnemma, Ph.D. Massachusetts Institute of Technology 1 Terramechanics Terramechanics Engineering science that studies the interaction between vehicles
Modeling of Flexible and Rigid Wheels for Exploration Rover on Rough Terrain
 Modeling of Flexible and Rigid Wheels for Exploration Rover on Rough Terrain Genya Ishigami 1), Masatsugu Otsuki 1), Takashi Kubota 1), and Karl Iagnemma 2) 1) Institute of Space and Astronautical Science,
Modeling of Flexible and Rigid Wheels for Exploration Rover on Rough Terrain Genya Ishigami 1), Masatsugu Otsuki 1), Takashi Kubota 1), and Karl Iagnemma 2) 1) Institute of Space and Astronautical Science,
Predicting the performances of rigid rover wheels on extraterrestrial surfaces based on test results obtained on earth
 Available online at www.sciencedirect.com Journal of Terramechanics 49 (2012) 49 61 Journal of Terramechanics www.elsevier.com/locate/jterra Predicting the performances of rigid rover wheels on extraterrestrial
Available online at www.sciencedirect.com Journal of Terramechanics 49 (2012) 49 61 Journal of Terramechanics www.elsevier.com/locate/jterra Predicting the performances of rigid rover wheels on extraterrestrial
3D Simulation and Validation of RCL-E and MER Rover Types Mobility
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 26' ESTEC, Noordwijk, The Netherlands, November 28-3, 26 3D Simulation and Validation of RCL-E and
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 26' ESTEC, Noordwijk, The Netherlands, November 28-3, 26 3D Simulation and Validation of RCL-E and
Terramechanics 2. Soil bearing parameters Bulldozing Tandem wheels MARYLAND U N I V E R S I T Y O F
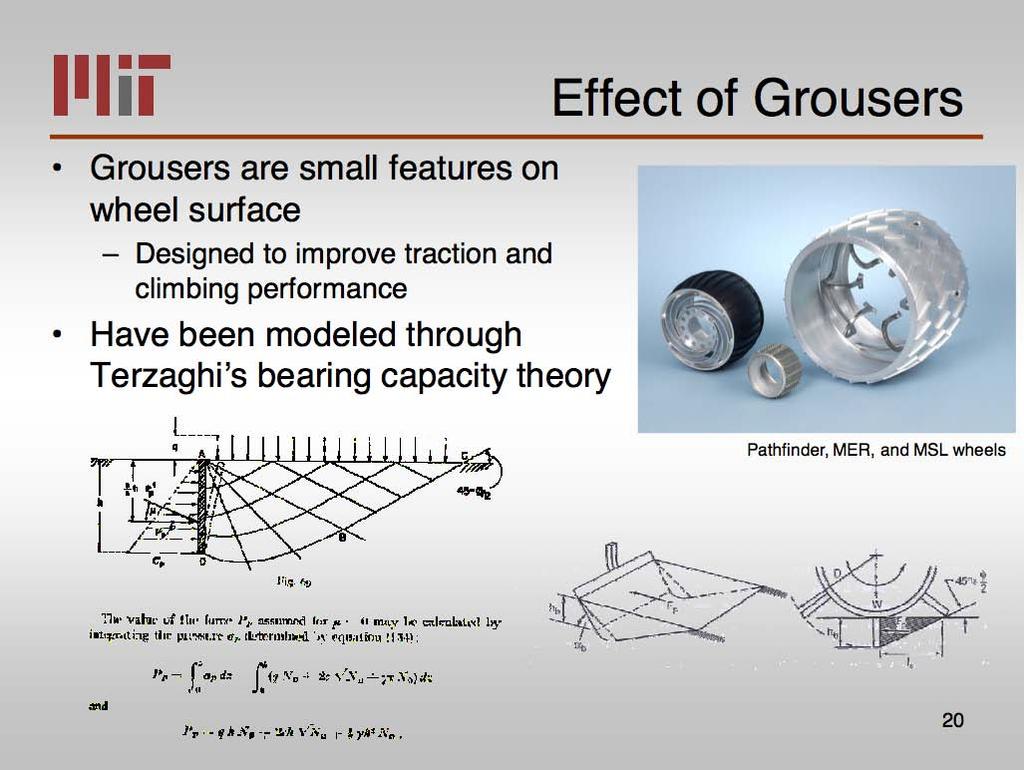
 Soil bearing parameters Bulldozing Tandem wheels 1 01 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Terzaghi Soil Bearing Capacity Factors N q = exp 3π φ tan φ cos π 4 + φ exp 3π N
Soil bearing parameters Bulldozing Tandem wheels 1 01 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Terzaghi Soil Bearing Capacity Factors N q = exp 3π φ tan φ cos π 4 + φ exp 3π N
Terramechanics Based Analysis and Motion Control of Rovers on Simulated Lunar Soil
 ICRA '07 Space Robotics Workshop 14 April, 2007 Terramechanics Based Analysis and Motion Control of Rovers on Simulated Lunar Soil Kazuya Yoshida and Keiji Nagatani Dept. Aerospace Engineering Graduate
ICRA '07 Space Robotics Workshop 14 April, 2007 Terramechanics Based Analysis and Motion Control of Rovers on Simulated Lunar Soil Kazuya Yoshida and Keiji Nagatani Dept. Aerospace Engineering Graduate
THREE-DIMENSIONAL STRESS DISTRIBUTION OF A RIGID WHEEL ON LUNAR REGOLITH SIMULANT
 THREE-DIMENSIONAL STRESS DISTRIBUTION OF A RIGID WHEEL ON LUNAR REGOLITH SIMULANT *Shoya Higa 1, Kazumasa Sawada 2, Keigo Teruya 3, Kenji Nagaoka 4, Kazuya Yoshida 5 1 Tohoku University, Aoba 6-6-01, Aramaki,
THREE-DIMENSIONAL STRESS DISTRIBUTION OF A RIGID WHEEL ON LUNAR REGOLITH SIMULANT *Shoya Higa 1, Kazumasa Sawada 2, Keigo Teruya 3, Kenji Nagaoka 4, Kazuya Yoshida 5 1 Tohoku University, Aoba 6-6-01, Aramaki,
The Mechanics of Tractor - Implement Performance
 The Mechanics of Tractor - Implement Performance Theory and Worked Examples R.H. Macmillan CHAPTER 4 TRACTOR PERFORMANCE ON SOFT SOIL - THEORETICAL Printed from: http://www.eprints.unimelb.edu.au CONTENTS
The Mechanics of Tractor - Implement Performance Theory and Worked Examples R.H. Macmillan CHAPTER 4 TRACTOR PERFORMANCE ON SOFT SOIL - THEORETICAL Printed from: http://www.eprints.unimelb.edu.au CONTENTS
SOIL MECHANICS OF LUNAR REGOLITH SIMULANTS FOR PROBE LANDING AND ROVER LOCOMOTION
 SOIL MECHANICS OF LUNAR REGOLITH SIMULANTS FOR PROBE LANDING AND ROVER LOCOMOTION Kazuya Yoshida *1, Keiji Nagatani *1, Genya Ishigami *1, Shigehito Shimizu *1 Kozo Sekimoto *2, Akira Miyahara *3, Takaaki
SOIL MECHANICS OF LUNAR REGOLITH SIMULANTS FOR PROBE LANDING AND ROVER LOCOMOTION Kazuya Yoshida *1, Keiji Nagatani *1, Genya Ishigami *1, Shigehito Shimizu *1 Kozo Sekimoto *2, Akira Miyahara *3, Takaaki
A NEW MULTI-BODY DYNAMIC MODEL FOR SEAFLOOR MINER AND ITS TRAFFICABILITY EVALUATION
 ISSN 176-459 Int j simul model 14 (15) 4, 73-743 Original scientific paper A NEW MULTI-BODY DYNAMIC MODEL FOR SEAFLOOR MINER AND ITS TRAFFICABILITY EVALUATION Dai, Y. *,**,# ; Zhu, X. * ; Chen, L. S. *
ISSN 176-459 Int j simul model 14 (15) 4, 73-743 Original scientific paper A NEW MULTI-BODY DYNAMIC MODEL FOR SEAFLOOR MINER AND ITS TRAFFICABILITY EVALUATION Dai, Y. *,**,# ; Zhu, X. * ; Chen, L. S. *
A predictive Wheel-Soil Interaction Model for Planetary Rovers validated in Testbeds and against MER performance data
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 6' ESTEC, Noordwijk, The Netherlands, November 8-3, 6 A predictive Wheel-Soil Interaction Model
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 6' ESTEC, Noordwijk, The Netherlands, November 8-3, 6 A predictive Wheel-Soil Interaction Model
Experimental Device for Measuring Sandy Soil Sinkage Parameters
 Bull. Fac. Agr., Saga Univ. No Experimental Device for Measuring Sandy Soil Sinkage Parameters Nang Nguyen Van, Takaaki MATSUO, Tatsuya KOUMOTO * and Shigeki INABA ** (Laboratory of Agricultural Machinery,
Bull. Fac. Agr., Saga Univ. No Experimental Device for Measuring Sandy Soil Sinkage Parameters Nang Nguyen Van, Takaaki MATSUO, Tatsuya KOUMOTO * and Shigeki INABA ** (Laboratory of Agricultural Machinery,
Using the Soft-Soil tire model
 Using the Sot-Soil tire model The Adams/Tire Sot Soil tire model oers a basic model to describe the tire-soil interaction orces or any tire on elastic/plastic grounds, such as sand, clay, loam and snow.
Using the Sot-Soil tire model The Adams/Tire Sot Soil tire model oers a basic model to describe the tire-soil interaction orces or any tire on elastic/plastic grounds, such as sand, clay, loam and snow.
Application of a Dynamic Pressure-Sinkage Relationship for Lightweight Mobile Robots
 Int. J. Vehicle Autonomous Systems, Vol. x, No. x, xxxx 1 Application of a Dynamic Pressure-Sinkage Relationship for Lightweight Mobile Robots Rishad A. Irani* Dalhousie University, Department of Mechanical
Int. J. Vehicle Autonomous Systems, Vol. x, No. x, xxxx 1 Application of a Dynamic Pressure-Sinkage Relationship for Lightweight Mobile Robots Rishad A. Irani* Dalhousie University, Department of Mechanical
Overview. Dry Friction Wedges Flatbelts Screws Bearings Rolling Resistance
 Friction Chapter 8 Overview Dry Friction Wedges Flatbelts Screws Bearings Rolling Resistance Dry Friction Friction is defined as a force of resistance acting on a body which prevents slipping of the body
Friction Chapter 8 Overview Dry Friction Wedges Flatbelts Screws Bearings Rolling Resistance Dry Friction Friction is defined as a force of resistance acting on a body which prevents slipping of the body
Vehicle Dynamics CEE 320. Winter 2006 CEE 320 Steve Muench
 Vehicle Dynamics Steve Muench Outline 1. Resistance a. Aerodynamic b. Rolling c. Grade. Tractive Effort 3. Acceleration 4. Braking Force 5. Stopping Sight Distance (SSD) Main Concepts Resistance Tractive
Vehicle Dynamics Steve Muench Outline 1. Resistance a. Aerodynamic b. Rolling c. Grade. Tractive Effort 3. Acceleration 4. Braking Force 5. Stopping Sight Distance (SSD) Main Concepts Resistance Tractive
SOLUTION 8 7. To hold lever: a+ M O = 0; F B (0.15) - 5 = 0; F B = N. Require = N N B = N 0.3. Lever,
 - 5 = 0; F B = N. Require = N N B = N 0.3. Lever,") 8 3. If the coefficient of static friction at is m s = 0.4 and the collar at is smooth so it only exerts a horizontal force on the pipe, determine the minimum distance x so that the bracket can support
8 3. If the coefficient of static friction at is m s = 0.4 and the collar at is smooth so it only exerts a horizontal force on the pipe, determine the minimum distance x so that the bracket can support
Autonomous terrain parameter estimation for wheeled vehicles
 Autonomous terrain parameter estimation for wheeled vehicles Laura E. Ray a a Thayer School of Engineering, Dartmouth College, 8 Cummings Hall Hanover NH 3755 ABSTRACT This paper reports a methodology
Autonomous terrain parameter estimation for wheeled vehicles Laura E. Ray a a Thayer School of Engineering, Dartmouth College, 8 Cummings Hall Hanover NH 3755 ABSTRACT This paper reports a methodology
Influence of Atmosphere on Lunar Rover Performance Analysis based on Soil Parameter Identification
 Influence of Atmosphere on Lunar Rover Performance Analysis based on Soil Parameter Identification Masataku Sutoh 1, Sachiko Wakabayashi 2, Takeshi Hoshino 3 Japan Aerospace Exploration Agency, 7-44-1
Influence of Atmosphere on Lunar Rover Performance Analysis based on Soil Parameter Identification Masataku Sutoh 1, Sachiko Wakabayashi 2, Takeshi Hoshino 3 Japan Aerospace Exploration Agency, 7-44-1
COMPARISON OF DISCRETE ELEMENT METHOD AND TRADITIONAL MODELING METHODS FOR STEADY-STATE WHEEL-TERRAIN INTERACTION OF SMALL VEHICLES
 COMPARISON OF DISCRETE ELEMENT METHOD AND TRADITIONAL MODELING METHODS FOR STEADY-STATE WHEEL-TERRAIN INTERACTION OF SMALL VEHICLES William Smith a, Daniel Melanz b, Carmine Senatore c, Karl Iagnemma c,
COMPARISON OF DISCRETE ELEMENT METHOD AND TRADITIONAL MODELING METHODS FOR STEADY-STATE WHEEL-TERRAIN INTERACTION OF SMALL VEHICLES William Smith a, Daniel Melanz b, Carmine Senatore c, Karl Iagnemma c,
Journal of Field Robotics
 Interaction Mechanics Model for Rigid Driving Wheels of Planetary Rovers Moving on Sandy Terrain Considering Multiple Effects Journal: Journal of Field Robotics Manuscript ID: ROB--0.R Wiley - Manuscript
Interaction Mechanics Model for Rigid Driving Wheels of Planetary Rovers Moving on Sandy Terrain Considering Multiple Effects Journal: Journal of Field Robotics Manuscript ID: ROB--0.R Wiley - Manuscript
A Volumetric Contact Model for Space Robot and Planetary Rover Application
 Introduction Elastic Foundation Model Experimental Validation Hyperelastic Foundation Model Planetary Rover Simulation Platform Future Work A Volumetric Contact Model for Space Robot and Planetary Rover
Introduction Elastic Foundation Model Experimental Validation Hyperelastic Foundation Model Planetary Rover Simulation Platform Future Work A Volumetric Contact Model for Space Robot and Planetary Rover
KEYWORDS: Wheel terrain interaction; Wheel soil interface; Terramechanics; Off-road mobile robots; Multibody system.
 Robotica (212) volume 3, pp. 491 53. Cambridge University Press 211 doi:1.117/s263574711798 Terramechanics-based wheel terrain interaction model and its applications to off-road wheeled mobile robots Zhenzhong
Robotica (212) volume 3, pp. 491 53. Cambridge University Press 211 doi:1.117/s263574711798 Terramechanics-based wheel terrain interaction model and its applications to off-road wheeled mobile robots Zhenzhong
Slip-Based Traction Control of a Planetary Rover
 Slip-Based Traction Control of a Planetary Rover Kazuya Yoshida, Hiroshi Hamano 2, and Toshinobu Watanabe Tohoku University, Sendai, Japan 2 Mazda Motor Corporation, Hiroshima, Japan Abstract. This paper
Slip-Based Traction Control of a Planetary Rover Kazuya Yoshida, Hiroshi Hamano 2, and Toshinobu Watanabe Tohoku University, Sendai, Japan 2 Mazda Motor Corporation, Hiroshima, Japan Abstract. This paper
THE TRACTIVE PERFORMANCE OF A FRICTION-BASED PROTOTYPE TRACK
 University of Pretoria etd Yu, T (2006) THE TRACTIVE PERFORMANCE OF A FRICTION-BASED PROTOTYPE TRACK TINGMIN YU Submitted in partial fulfillment of the requirements for the Degree of Philosophiae Doctor
University of Pretoria etd Yu, T (2006) THE TRACTIVE PERFORMANCE OF A FRICTION-BASED PROTOTYPE TRACK TINGMIN YU Submitted in partial fulfillment of the requirements for the Degree of Philosophiae Doctor
Engineering Mechanics. Friction in Action
 Engineering Mechanics Friction in Action What is friction? Friction is a retarding force that opposes motion. Friction types: Static friction Kinetic friction Fluid friction Sources of dry friction Dry
Engineering Mechanics Friction in Action What is friction? Friction is a retarding force that opposes motion. Friction types: Static friction Kinetic friction Fluid friction Sources of dry friction Dry
Objectives. In this section you will learn the following. Rankine s theory. Coulomb s theory. Method of horizontal slices given by Wang (2000)
") Objectives In this section you will learn the following Rankine s theory Coulomb s theory Method of horizontal slices given by Wang (2000) Distribution of the earth pressure Height of application of the
Objectives In this section you will learn the following Rankine s theory Coulomb s theory Method of horizontal slices given by Wang (2000) Distribution of the earth pressure Height of application of the
Simple Car Dynamics. Outline. Claude Lacoursière HPC2N/VRlab, Umeå Universitet, Sweden, May 18, 2005
 Simple Car Dynamics Claude Lacoursière HPC2N/VRlab, Umeå Universitet, Sweden, and CMLabs Simulations, Montréal, Canada May 18, 2005 Typeset by FoilTEX May 16th 2005 Outline basics of vehicle dynamics different
Simple Car Dynamics Claude Lacoursière HPC2N/VRlab, Umeå Universitet, Sweden, and CMLabs Simulations, Montréal, Canada May 18, 2005 Typeset by FoilTEX May 16th 2005 Outline basics of vehicle dynamics different
PHYS 1114, Lecture 33, April 10 Contents:
 PHYS 1114, Lecture 33, April 10 Contents: 1 This class is o cially cancelled, and has been replaced by the common exam Tuesday, April 11, 5:30 PM. A review and Q&A session is scheduled instead during class
PHYS 1114, Lecture 33, April 10 Contents: 1 This class is o cially cancelled, and has been replaced by the common exam Tuesday, April 11, 5:30 PM. A review and Q&A session is scheduled instead during class
STATICS. Friction VECTOR MECHANICS FOR ENGINEERS: Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Eighth E 8 Friction CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Contents Introduction Laws of Dry Friction.
Eighth E 8 Friction CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Contents Introduction Laws of Dry Friction.
Simulating Track/Sprocket and Track/Wheel/Terrain Contact in Tracked Vehicles
 Simulating Track/Sprocket and Track/Wheel/Terrain Contact in Tracked Vehicles Z.-D. Ma C. Scholar N. C. Perkins University of Michigan Objective Efficient simulation of vehicle response including track
Simulating Track/Sprocket and Track/Wheel/Terrain Contact in Tracked Vehicles Z.-D. Ma C. Scholar N. C. Perkins University of Michigan Objective Efficient simulation of vehicle response including track
Physics 141 Rotational Motion 2 Page 1. Rotational Motion 2
 Physics 141 Rotational Motion 2 Page 1 Rotational Motion 2 Right handers, go over there, left handers over here. The rest of you, come with me.! Yogi Berra Torque Motion of a rigid body, like motion of
Physics 141 Rotational Motion 2 Page 1 Rotational Motion 2 Right handers, go over there, left handers over here. The rest of you, come with me.! Yogi Berra Torque Motion of a rigid body, like motion of
First-Year Engineering Program. Physics RC Reading Module
 Physics RC Reading Module Frictional Force: A Contact Force Friction is caused by the microscopic interactions between the two surfaces. Direction is parallel to the contact surfaces and proportional to
Physics RC Reading Module Frictional Force: A Contact Force Friction is caused by the microscopic interactions between the two surfaces. Direction is parallel to the contact surfaces and proportional to
Slip, Traction Control, and Navigation of a Lunar Rover
 Slip, Traction Control, and Navigation of a Lunar Rover Kazuya Yoshida, Toshinobu Watanabe, Noriyuki Mizuno, Genya Ishigami Department of Aeronautics and Space Engineering, Tohoku University, Aoba 1, Sendai
Slip, Traction Control, and Navigation of a Lunar Rover Kazuya Yoshida, Toshinobu Watanabe, Noriyuki Mizuno, Genya Ishigami Department of Aeronautics and Space Engineering, Tohoku University, Aoba 1, Sendai
UNIVERSITY OF SASKATCHEWAN GE MECHANICS III FINAL EXAM APRIL 18, 2011 Professor A. Dolovich A CLOSED BOOK EXAMINATION TIME: 3 HOURS
 UNIVERSITY OF SASKATCHEWAN GE 226.3 MECHANICS III FINAL EXAM APRIL 18, 2011 Professor A. Dolovich A CLOSED BOOK EXAMINATION TIME: 3 HOURS LAST NAME (printed): FIRST NAME (printed): STUDENT NUMBER: EXAMINATION
UNIVERSITY OF SASKATCHEWAN GE 226.3 MECHANICS III FINAL EXAM APRIL 18, 2011 Professor A. Dolovich A CLOSED BOOK EXAMINATION TIME: 3 HOURS LAST NAME (printed): FIRST NAME (printed): STUDENT NUMBER: EXAMINATION
Chapter 8: Momentum, Impulse, & Collisions. Newton s second law in terms of momentum:
 linear momentum: Chapter 8: Momentum, Impulse, & Collisions Newton s second law in terms of momentum: impulse: Under what SPECIFIC condition is linear momentum conserved? (The answer does not involve collisions.)
linear momentum: Chapter 8: Momentum, Impulse, & Collisions Newton s second law in terms of momentum: impulse: Under what SPECIFIC condition is linear momentum conserved? (The answer does not involve collisions.)
16.07 Dynamics Final Exam
 Name:... Massachusetts Institute of Technology 16.07 Dynamics Final Exam Tuesday, December 20, 2005 Problem 1 (8) Problem 2 (8) Problem 3 (10) Problem 4 (10) Problem 5 (10) Problem 6 (10) Problem 7 (10)
Name:... Massachusetts Institute of Technology 16.07 Dynamics Final Exam Tuesday, December 20, 2005 Problem 1 (8) Problem 2 (8) Problem 3 (10) Problem 4 (10) Problem 5 (10) Problem 6 (10) Problem 7 (10)
Dynamics ( 동역학 ) Ch.3 Kinetic of Particles (3.1)
 Ch.3 Kinetic of Particles (3.1)") Dynamics ( 동역학 ) Ch.3 Kinetic of Particles (3.1) Introduction This chapter exclusively deals with the Newton s second Law Newton s second law: - A particle will have an acceleration proportional to the
Dynamics ( 동역학 ) Ch.3 Kinetic of Particles (3.1) Introduction This chapter exclusively deals with the Newton s second Law Newton s second law: - A particle will have an acceleration proportional to the
The single track model
 The single track model Dr. M. Gerdts Uniersität Bayreuth, SS 2003 Contents 1 Single track model 1 1.1 Geometry.................................... 1 1.2 Computation of slip angles...........................
The single track model Dr. M. Gerdts Uniersität Bayreuth, SS 2003 Contents 1 Single track model 1 1.1 Geometry.................................... 1 1.2 Computation of slip angles...........................
Physics. Assignment-1(UNITS AND MEASUREMENT)
") Assignment-1(UNITS AND MEASUREMENT) 1. Define physical quantity and write steps for measurement. 2. What are fundamental units and derived units? 3. List the seven basic and two supplementary physical
Assignment-1(UNITS AND MEASUREMENT) 1. Define physical quantity and write steps for measurement. 2. What are fundamental units and derived units? 3. List the seven basic and two supplementary physical
SOLUTION di x = y2 dm. rdv. m = a 2 bdx. = 2 3 rpab2. I x = 1 2 rp L0. b 4 a1 - x2 a 2 b. = 4 15 rpab4. Thus, I x = 2 5 mb2. Ans.
 17 4. Determine the moment of inertia of the semiellipsoid with respect to the x axis and express the result in terms of the mass m of the semiellipsoid. The material has a constant density r. y x y a
17 4. Determine the moment of inertia of the semiellipsoid with respect to the x axis and express the result in terms of the mass m of the semiellipsoid. The material has a constant density r. y x y a
The magnitude of this force is a scalar quantity called weight.
 Everyday Forces has direction The gravitational force (F g ) exerted on the ball by Earth is a vector directed toward the center of the earth. The magnitude of this force is a scalar quantity called weight.
Everyday Forces has direction The gravitational force (F g ) exerted on the ball by Earth is a vector directed toward the center of the earth. The magnitude of this force is a scalar quantity called weight.
Physics 111: Mechanics Lecture 5
 Physics 111: Mechanics Lecture 5 Bin Chen NJIT Physics Department Forces of Friction: f q When an object is in motion on a surface or through a viscous medium, there will be a resistance to the motion.
Physics 111: Mechanics Lecture 5 Bin Chen NJIT Physics Department Forces of Friction: f q When an object is in motion on a surface or through a viscous medium, there will be a resistance to the motion.
Physics 12. Unit 5 Circular Motion and Gravitation Part 1
 Physics 12 Unit 5 Circular Motion and Gravitation Part 1 1. Nonlinear motions According to the Newton s first law, an object remains its tendency of motion as long as there is no external force acting
Physics 12 Unit 5 Circular Motion and Gravitation Part 1 1. Nonlinear motions According to the Newton s first law, an object remains its tendency of motion as long as there is no external force acting
Mobility Prediction of Multi-Body Vehicle Dynamics Handling Simulations on Deformable Terrain. By Justin C. Madsen
 Mobility Prediction of Multi-Body Vehicle Dynamics Handling Simulations on Deformable Terrain By Justin C. Madsen A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor
Mobility Prediction of Multi-Body Vehicle Dynamics Handling Simulations on Deformable Terrain By Justin C. Madsen A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor
Lecture 6 mechanical system modeling equivalent mass gears
 M2794.25 Mechanical System Analysis 기계시스템해석 lecture 6,7,8 Dongjun Lee ( 이동준 ) Department of Mechanical & Aerospace Engineering Seoul National University Dongjun Lee Lecture 6 mechanical system modeling
M2794.25 Mechanical System Analysis 기계시스템해석 lecture 6,7,8 Dongjun Lee ( 이동준 ) Department of Mechanical & Aerospace Engineering Seoul National University Dongjun Lee Lecture 6 mechanical system modeling
Scalability of Classical Terramechanics Models for Lightweight Vehicle Applications
 UCLASSIFIED: Distribution Statement A. Approved for public release.#408 03 DIA GROUD VEHICLE SYSTEMS EGIEERIG AD TECHOLOGY SYMPOSIUM MODELIG & SIMULATIO, TESTIG AD VALIDATIO (MSTV) MII-SYMPOSIUM AUGUST
UCLASSIFIED: Distribution Statement A. Approved for public release.#408 03 DIA GROUD VEHICLE SYSTEMS EGIEERIG AD TECHOLOGY SYMPOSIUM MODELIG & SIMULATIO, TESTIG AD VALIDATIO (MSTV) MII-SYMPOSIUM AUGUST
Homework Assignment 4 Root Finding Algorithms The Maximum Velocity of a Car Due: Friday, February 19, 2010 at 12noon
 ME 2016 A Spring Semester 2010 Computing Techniques 3-0-3 Homework Assignment 4 Root Finding Algorithms The Maximum Velocity of a Car Due: Friday, February 19, 2010 at 12noon Description and Outcomes In
ME 2016 A Spring Semester 2010 Computing Techniques 3-0-3 Homework Assignment 4 Root Finding Algorithms The Maximum Velocity of a Car Due: Friday, February 19, 2010 at 12noon Description and Outcomes In
Physics 101: Lecture 15 Torque, F=ma for rotation, and Equilibrium
 Physics 101: Lecture 15 Torque, F=ma for rotation, and Equilibrium Strike (Day 10) Prelectures, checkpoints, lectures continue with no change. Take-home quizzes this week. See Elaine Schulte s email. HW
Physics 101: Lecture 15 Torque, F=ma for rotation, and Equilibrium Strike (Day 10) Prelectures, checkpoints, lectures continue with no change. Take-home quizzes this week. See Elaine Schulte s email. HW
Displacement charts for slopes subjected to seismic loads
 Computers and Geotechnics 25 (1999) 45±55 www.elsevier.com/locate/compgeo Technical Note Displacement charts for slopes subjected to seismic loads Liangzhi You a, Radoslaw L. Michalowski a,b, * a Department
Computers and Geotechnics 25 (1999) 45±55 www.elsevier.com/locate/compgeo Technical Note Displacement charts for slopes subjected to seismic loads Liangzhi You a, Radoslaw L. Michalowski a,b, * a Department
Dynamic equilibrium: object moves with constant velocity in a straight line. = 0, a x = i
 Dynamic equilibrium: object moves with constant velocity in a straight line. We note that F net a s are both vector quantities, so in terms of their components, (F net ) x = i (F i ) x = 0, a x = i (a
Dynamic equilibrium: object moves with constant velocity in a straight line. We note that F net a s are both vector quantities, so in terms of their components, (F net ) x = i (F i ) x = 0, a x = i (a
Rishad A. Irani, Robert J. Bauer & Andrew Warkentin
 Dynamic Wheel-Soil Model for Lightweight Mobile Robots with Smooth Wheels Rishad A. Irani, Robert J. Bauer & Andrew Warkentin Journal of Intelligent & Robotic Systems with a special section on Unmanned
Dynamic Wheel-Soil Model for Lightweight Mobile Robots with Smooth Wheels Rishad A. Irani, Robert J. Bauer & Andrew Warkentin Journal of Intelligent & Robotic Systems with a special section on Unmanned
Rotational Kinematics
 Rotational Kinematics Rotational Coordinates Ridged objects require six numbers to describe their position and orientation: 3 coordinates 3 axes of rotation Rotational Coordinates Use an angle θ to describe
Rotational Kinematics Rotational Coordinates Ridged objects require six numbers to describe their position and orientation: 3 coordinates 3 axes of rotation Rotational Coordinates Use an angle θ to describe
Problem 1 Problem 2 Problem 3 Problem 4 Total
 Name Section THE PENNSYLVANIA STATE UNIVERSITY Department of Engineering Science and Mechanics Engineering Mechanics 12 Final Exam May 5, 2003 8:00 9:50 am (110 minutes) Problem 1 Problem 2 Problem 3 Problem
Name Section THE PENNSYLVANIA STATE UNIVERSITY Department of Engineering Science and Mechanics Engineering Mechanics 12 Final Exam May 5, 2003 8:00 9:50 am (110 minutes) Problem 1 Problem 2 Problem 3 Problem
PhysicsAndMathsTutor.com
 M Work and energy - Conservation of energy 1. A particle P of mass 0.6 kg is released from rest and slides down a line of greatest slope of a rough plane. The plane is inclined at 30 to the horizontal.
M Work and energy - Conservation of energy 1. A particle P of mass 0.6 kg is released from rest and slides down a line of greatest slope of a rough plane. The plane is inclined at 30 to the horizontal.
10 Paper discussion + terradynamics 4/25/2018
 10 Paper discussion + terradynamics 4/25/2018 Paper discussion Paper for next Wednesday Next Wednesday we will discuss this paper out in Science last week http://science.sciencemag.org/content/360/6387/eaao1082
10 Paper discussion + terradynamics 4/25/2018 Paper discussion Paper for next Wednesday Next Wednesday we will discuss this paper out in Science last week http://science.sciencemag.org/content/360/6387/eaao1082
Physics 121, Final Exam Do not turn the pages of the exam until you are instructed to do so.
 , Final Exam Do not turn the pages of the exam until you are instructed to do so. You are responsible for reading the following rules carefully before beginning. Exam rules: You may use only a writing
, Final Exam Do not turn the pages of the exam until you are instructed to do so. You are responsible for reading the following rules carefully before beginning. Exam rules: You may use only a writing
(i) JUL 3. June May 10, Certified by: Dr. Karl Iagnemma Principle Research Scientist, LMP Thesis Supervisor
 JUL 3. June May 10, Certified by: Dr. Karl Iagnemma Principle Research Scientist, LMP Thesis Supervisor") Terramechanical Analysis of Rover Wheel Mobility over Simulated Martian Terrain at Various Slip Conditions and Vertical Loads by Gregory D. Puszko MASSACHUES WIN OF TECHNOLYY JUL 3 E Submitted to the Department
Terramechanical Analysis of Rover Wheel Mobility over Simulated Martian Terrain at Various Slip Conditions and Vertical Loads by Gregory D. Puszko MASSACHUES WIN OF TECHNOLYY JUL 3 E Submitted to the Department
PHYS 111 HOMEWORK #11
 PHYS 111 HOMEWORK #11 Due date: You have a choice here. You can submit this assignment on Tuesday, December and receive a 0 % bonus, or you can submit this for normal credit on Thursday, 4 December. If
PHYS 111 HOMEWORK #11 Due date: You have a choice here. You can submit this assignment on Tuesday, December and receive a 0 % bonus, or you can submit this for normal credit on Thursday, 4 December. If
Control of Mobile Robots Prof. Luca Bascetta
 Control of Mobile Robots Prof. Luca Bascetta EXERCISE 1 1. Consider a wheel rolling without slipping on the horizontal plane, keeping the sagittal plane in the vertical direction. Write the expression
Control of Mobile Robots Prof. Luca Bascetta EXERCISE 1 1. Consider a wheel rolling without slipping on the horizontal plane, keeping the sagittal plane in the vertical direction. Write the expression
PHYSICS 221, FALL 2011 EXAM #2 SOLUTIONS WEDNESDAY, NOVEMBER 2, 2011
 PHYSICS 1, FALL 011 EXAM SOLUTIONS WEDNESDAY, NOVEMBER, 011 Note: The unit vectors in the +x, +y, and +z directions of a right-handed Cartesian coordinate system are î, ĵ, and ˆk, respectively. In this
PHYSICS 1, FALL 011 EXAM SOLUTIONS WEDNESDAY, NOVEMBER, 011 Note: The unit vectors in the +x, +y, and +z directions of a right-handed Cartesian coordinate system are î, ĵ, and ˆk, respectively. In this
(b) The period T and the angular frequency ω of uniform rotation are related to the cyclic frequency f as. , ω = 2πf =
 The period T and the angular frequency ω of uniform rotation are related to the cyclic frequency f as. , ω = 2πf =") PHY 302 K. Solutions for problem set #9. Non-textbook problem #1: (a) Rotation frequency of 1 Hz means one revolution per second, or 60 revolutions per minute (RPM). The pre-lp vinyl disks rotated at 78
PHY 302 K. Solutions for problem set #9. Non-textbook problem #1: (a) Rotation frequency of 1 Hz means one revolution per second, or 60 revolutions per minute (RPM). The pre-lp vinyl disks rotated at 78
Physics 53 Exam 3 November 3, 2010 Dr. Alward
 1. When the speed of a rear-drive car (a car that's driven forward by the rear wheels alone) is increasing on a horizontal road the direction of the frictional force on the tires is: A) forward for all
1. When the speed of a rear-drive car (a car that's driven forward by the rear wheels alone) is increasing on a horizontal road the direction of the frictional force on the tires is: A) forward for all
Analysis of Shear Bands in Sand Under Reduced Gravity Conditions
 Analysis of Shear Bands in Sand Under Reduced Gravity Conditions Jason P. Marshall, Ryan C. Hurley, Dan Arthur, Ivan Vlahinic, Carmine Senatore, Karl Iagnemma, Brian Trease, and José E. Andrade Abstract
Analysis of Shear Bands in Sand Under Reduced Gravity Conditions Jason P. Marshall, Ryan C. Hurley, Dan Arthur, Ivan Vlahinic, Carmine Senatore, Karl Iagnemma, Brian Trease, and José E. Andrade Abstract
Trajectory Planning of Planar Tracked Vehicles
 Trajectory Planning of Planar Tracked Vehicles Zvi Shiller and William Serate Department of Mechanical, Aerospace and Nuclear Engineering University of California Los Angeles Los Angeles, California 924
Trajectory Planning of Planar Tracked Vehicles Zvi Shiller and William Serate Department of Mechanical, Aerospace and Nuclear Engineering University of California Los Angeles Los Angeles, California 924
Lecture 10. Example: Friction and Motion
 Lecture 10 Goals: Exploit Newton s 3 rd Law in problems with friction Employ Newton s Laws in 2D problems with circular motion Assignment: HW5, (Chapter 7, due 2/24, Wednesday) For Tuesday: Finish reading
Lecture 10 Goals: Exploit Newton s 3 rd Law in problems with friction Employ Newton s Laws in 2D problems with circular motion Assignment: HW5, (Chapter 7, due 2/24, Wednesday) For Tuesday: Finish reading
Lecture 7. Forces. Important note: First Exam is next Tuesday, Feb. 6, 8:15-9:45 pm (see link on Canvas for locations)
") Lecture 7 Forces Important note: First Exam is next Tuesday, Feb. 6, 8:15-9:45 pm (see link on Canvas for locations) Today s Topics: Forces The gravitational force The normal force Frictional Forces Next
Lecture 7 Forces Important note: First Exam is next Tuesday, Feb. 6, 8:15-9:45 pm (see link on Canvas for locations) Today s Topics: Forces The gravitational force The normal force Frictional Forces Next
Assignment 9. to roll without slipping, how large must F be? Ans: F = R d mgsinθ.
 Assignment 9 1. A heavy cylindrical container is being rolled up an incline as shown, by applying a force parallel to the incline. The static friction coefficient is µ s. The cylinder has radius R, mass
Assignment 9 1. A heavy cylindrical container is being rolled up an incline as shown, by applying a force parallel to the incline. The static friction coefficient is µ s. The cylinder has radius R, mass
Chapter 12. Static Equilibrium and Elasticity
 Chapter 12 Static Equilibrium and Elasticity Static Equilibrium Equilibrium implies that the object moves with both constant velocity and constant angular velocity relative to an observer in an inertial
Chapter 12 Static Equilibrium and Elasticity Static Equilibrium Equilibrium implies that the object moves with both constant velocity and constant angular velocity relative to an observer in an inertial
. d. v A v B. e. none of these.
 General Physics I Exam 3 - Chs. 7,8,9 - Momentum, Rotation, Equilibrium Oct. 28, 2009 Name Rec. Instr. Rec. Time For full credit, make your work clear to the grader. Show the formulas you use, the essential
General Physics I Exam 3 - Chs. 7,8,9 - Momentum, Rotation, Equilibrium Oct. 28, 2009 Name Rec. Instr. Rec. Time For full credit, make your work clear to the grader. Show the formulas you use, the essential
CHAPTER 12 STATIC EQUILIBRIUM AND ELASTICITY. Conditions for static equilibrium Center of gravity (weight) Examples of static equilibrium
 Examples of static equilibrium") CHAPTER 12 STATIC EQUILIBRIUM AND ELASTICITY As previously defined, an object is in equilibrium when it is at rest or moving with constant velocity, i.e., with no net force acting on it. The following
CHAPTER 12 STATIC EQUILIBRIUM AND ELASTICITY As previously defined, an object is in equilibrium when it is at rest or moving with constant velocity, i.e., with no net force acting on it. The following
Physics 351, Spring 2017, Homework #2. Due at start of class, Friday, January 27, 2017
 Physics 351, Spring 2017, Homework #2. Due at start of class, Friday, January 27, 2017 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page at
Physics 351, Spring 2017, Homework #2. Due at start of class, Friday, January 27, 2017 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page at
Lecture 13 REVIEW. Physics 106 Spring What should we know? What should we know? Newton s Laws
 Lecture 13 REVIEW Physics 106 Spring 2006 http://web.njit.edu/~sirenko/ What should we know? Vectors addition, subtraction, scalar and vector multiplication Trigonometric functions sinθ, cos θ, tan θ,
Lecture 13 REVIEW Physics 106 Spring 2006 http://web.njit.edu/~sirenko/ What should we know? Vectors addition, subtraction, scalar and vector multiplication Trigonometric functions sinθ, cos θ, tan θ,
PHY131 Summer 2011 Class 5 Notes
 PHY131 Summer 2011 Class 5 Notes 5/31/11 PHY131H1F Summer Class 5 Today: Equilibrium Mass, Weight, Gravity Friction, Drag Rolling without slipping Examples of Newton s Second Law Pre-class Reading Quiz.
PHY131 Summer 2011 Class 5 Notes 5/31/11 PHY131H1F Summer Class 5 Today: Equilibrium Mass, Weight, Gravity Friction, Drag Rolling without slipping Examples of Newton s Second Law Pre-class Reading Quiz.
Chapter 8. Centripetal Force and The Law of Gravity
 Chapter 8 Centripetal Force and The Law of Gravity Centripetal Acceleration An object traveling in a circle, even though it moves with a constant speed, will have an acceleration The centripetal acceleration
Chapter 8 Centripetal Force and The Law of Gravity Centripetal Acceleration An object traveling in a circle, even though it moves with a constant speed, will have an acceleration The centripetal acceleration
CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5
 1 / 36 CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Date: 2 / 36 EQUATIONS OF MOTION: ROTATION
1 / 36 CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Date: 2 / 36 EQUATIONS OF MOTION: ROTATION
Closed-form Method to Evaluate Bike Braking Performance
 Human Power ejournal, April 4, 13 Closed-form Method to Evaluate Bike Braking Performance Junghsen Lieh, PhD Professor, Mechanical & Materials Engineering Wright State University, Dayton Ohio 45435 USA
Human Power ejournal, April 4, 13 Closed-form Method to Evaluate Bike Braking Performance Junghsen Lieh, PhD Professor, Mechanical & Materials Engineering Wright State University, Dayton Ohio 45435 USA
Phys101 Second Major-152 Zero Version Coordinator: Dr. W. Basheer Monday, March 07, 2016 Page: 1
 Phys101 Second Major-15 Zero Version Coordinator: Dr. W. Basheer Monday, March 07, 016 Page: 1 Q1. Figure 1 shows two masses; m 1 = 4.0 and m = 6.0 which are connected by a massless rope passing over a
Phys101 Second Major-15 Zero Version Coordinator: Dr. W. Basheer Monday, March 07, 016 Page: 1 Q1. Figure 1 shows two masses; m 1 = 4.0 and m = 6.0 which are connected by a massless rope passing over a
Physics 201 Exam 3 (Monday, November 5) Fall 2012 (Saslow)
 Fall 2012 (Saslow)") Physics 201 Exam 3 (Monday, November 5) Fall 2012 (Saslow) Name (printed) Lab Section(+2 pts) Name (signed as on ID) Multiple choice Section. Circle the correct answer. No work need be shown and no partial
Physics 201 Exam 3 (Monday, November 5) Fall 2012 (Saslow) Name (printed) Lab Section(+2 pts) Name (signed as on ID) Multiple choice Section. Circle the correct answer. No work need be shown and no partial
4.4. Friction and Inclines
 4.4. Friction and Inclines Frictional Forces Friction has its basis in surfaces that are not completely smooth. This roughness causes resistance to horizontal motion. Even smooth surfaces have a certain
4.4. Friction and Inclines Frictional Forces Friction has its basis in surfaces that are not completely smooth. This roughness causes resistance to horizontal motion. Even smooth surfaces have a certain
Torque and Rotation Lecture 7
 Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Physics 201 Lecture 16
 Physics 01 Lecture 16 Agenda: l Review for exam Lecture 16 Newton s Laws Three blocks are connected on the table as shown. The table has a coefficient of kinetic friction of 0.350, the masses are m 1 =
Physics 01 Lecture 16 Agenda: l Review for exam Lecture 16 Newton s Laws Three blocks are connected on the table as shown. The table has a coefficient of kinetic friction of 0.350, the masses are m 1 =
Exam I, Physics 117-Spring 2003, Mon. 3/10/2003
 General Instructions Exam I, Physics 117-Spring 2003, Mon. 3/10/2003 Instructor: Dr. S. Liberati There are a total of five problems in this exam. All problems carry equal weights. Do all the five problems
General Instructions Exam I, Physics 117-Spring 2003, Mon. 3/10/2003 Instructor: Dr. S. Liberati There are a total of five problems in this exam. All problems carry equal weights. Do all the five problems
Physics 1 Second Midterm Exam (AM) 2/25/2010
 2/25/2010") Physics Second Midterm Eam (AM) /5/00. (This problem is worth 40 points.) A roller coaster car of m travels around a vertical loop of radius R. There is no friction and no air resistance. At the top of
Physics Second Midterm Eam (AM) /5/00. (This problem is worth 40 points.) A roller coaster car of m travels around a vertical loop of radius R. There is no friction and no air resistance. At the top of
Chapter 6 Dynamics I: Motion Along a Line
 Chapter 6 Dynamics I: Motion Along a Line Chapter Goal: To learn how to solve linear force-and-motion problems. Slide 6-2 Chapter 6 Preview Slide 6-3 Chapter 6 Preview Slide 6-4 Chapter 6 Preview Slide
Chapter 6 Dynamics I: Motion Along a Line Chapter Goal: To learn how to solve linear force-and-motion problems. Slide 6-2 Chapter 6 Preview Slide 6-3 Chapter 6 Preview Slide 6-4 Chapter 6 Preview Slide
Basic ground vehicle dynamics 1. Prof. R.G. Longoria Spring 2015
 Basic ground vehicle dynamics 1 Prof. R.G. Longoria Spring 2015 Overview We will be studying wheeled vehicle systems in this course and in the lab, so we ll let that work drive our discussion. Before thinking
Basic ground vehicle dynamics 1 Prof. R.G. Longoria Spring 2015 Overview We will be studying wheeled vehicle systems in this course and in the lab, so we ll let that work drive our discussion. Before thinking
EQUATIONS OF MOTION: GENERAL PLANE MOTION (Section 17.5) Today s Objectives: Students will be able to analyze the planar kinetics of a rigid body
 Today s Objectives: Students will be able to analyze the planar kinetics of a rigid body") EQUATIONS OF MOTION: GENERAL PLANE MOTION (Section 17.5) Today s Objectives: Students will be able to analyze the planar kinetics of a rigid body undergoing general plane motion. APPLICATIONS As the soil
EQUATIONS OF MOTION: GENERAL PLANE MOTION (Section 17.5) Today s Objectives: Students will be able to analyze the planar kinetics of a rigid body undergoing general plane motion. APPLICATIONS As the soil
Physics 2211 ABC Quiz #3 Solutions Spring 2017
 Physics 2211 ABC Quiz #3 Solutions Spring 2017 I. (16 points) A block of mass m b is suspended vertically on a ideal cord that then passes through a frictionless hole and is attached to a sphere of mass
Physics 2211 ABC Quiz #3 Solutions Spring 2017 I. (16 points) A block of mass m b is suspended vertically on a ideal cord that then passes through a frictionless hole and is attached to a sphere of mass
7.6 Journal Bearings
 7.6 Journal Bearings 7.6 Journal Bearings Procedures and Strategies, page 1 of 2 Procedures and Strategies for Solving Problems Involving Frictional Forces on Journal Bearings For problems involving a
7.6 Journal Bearings 7.6 Journal Bearings Procedures and Strategies, page 1 of 2 Procedures and Strategies for Solving Problems Involving Frictional Forces on Journal Bearings For problems involving a
Name: M1 - Dynamics. Date: Time: Total marks available: Total marks achieved:
 Name: M1 - Dynamics Date: Time: Total marks available: Total marks achieved: Questions Q1. A railway truck P, of mass m kg, is moving along a straight horizontal track with speed 15 ms 1. Truck P collides
Name: M1 - Dynamics Date: Time: Total marks available: Total marks achieved: Questions Q1. A railway truck P, of mass m kg, is moving along a straight horizontal track with speed 15 ms 1. Truck P collides
P211 Spring 2004 Form A
 1. A 2 kg block A traveling with a speed of 5 m/s as shown collides with a stationary 4 kg block B. After the collision, A is observed to travel at right angles with respect to the initial direction with
1. A 2 kg block A traveling with a speed of 5 m/s as shown collides with a stationary 4 kg block B. After the collision, A is observed to travel at right angles with respect to the initial direction with
ω avg [between t 1 and t 2 ] = ω(t 1) + ω(t 2 ) 2
![ω avg [between t 1 and t 2 ] = ω(t 1) + ω(t 2 ) 2](/thumbs/94/120561024.jpg "ω avg [between t 1 and t 2 ] = ω(t 1) + ω(t 2 ) 2") PHY 302 K. Solutions for problem set #9. Textbook problem 7.10: For linear motion at constant acceleration a, average velocity during some time interval from t 1 to t 2 is the average of the velocities
PHY 302 K. Solutions for problem set #9. Textbook problem 7.10: For linear motion at constant acceleration a, average velocity during some time interval from t 1 to t 2 is the average of the velocities
PHYSICS 218 EXAM 2 Tuesday, October 26, 2010
 PHYSICS 218 EXAM 2 Tuesday, October 26, 2010 NAME: SECTION: 513 514 515 516 Note: 513 Recitation & lab Wed 8:00-10:50 am 514 Recitation & lab Wed 11:30 am - 2:20 pm 515 Recitation & lab Wed 3:00-5:50 pm
PHYSICS 218 EXAM 2 Tuesday, October 26, 2010 NAME: SECTION: 513 514 515 516 Note: 513 Recitation & lab Wed 8:00-10:50 am 514 Recitation & lab Wed 11:30 am - 2:20 pm 515 Recitation & lab Wed 3:00-5:50 pm
PORTMORE COMMUNITY COLLEGE
 PORTMORE COMMUNITY COLLEGE ASSOCIATE DEGREE IN ENGINEERING TECHNOLOGY RESIT EXAMINATIONS SEMESTER 2 July 2012 COURSE NAME: Mechanical Engineering Science CODE: GROUP: ADET 1 DATE: July 3, 2012 TIME: DURATION:
PORTMORE COMMUNITY COLLEGE ASSOCIATE DEGREE IN ENGINEERING TECHNOLOGY RESIT EXAMINATIONS SEMESTER 2 July 2012 COURSE NAME: Mechanical Engineering Science CODE: GROUP: ADET 1 DATE: July 3, 2012 TIME: DURATION:
Chapter 4 Dynamics: Newton s Laws of Motion
 Chapter 4 Dynamics: Newton s Laws of Motion Force Newton s First Law of Motion Mass Newton s Second Law of Motion Newton s Third Law of Motion Weight the Force of Gravity; and the Normal Force Applications
Chapter 4 Dynamics: Newton s Laws of Motion Force Newton s First Law of Motion Mass Newton s Second Law of Motion Newton s Third Law of Motion Weight the Force of Gravity; and the Normal Force Applications
A PHYSICS 201 Final Exam
 PHYSICS 201 Final Exam Fall 2014 Last Name: First Name: Section: UIN: You have 120 minutes to complete the exam. Formulae are provided. You may NOT use any other formula sheet. You may use a calculator
PHYSICS 201 Final Exam Fall 2014 Last Name: First Name: Section: UIN: You have 120 minutes to complete the exam. Formulae are provided. You may NOT use any other formula sheet. You may use a calculator