An Introduction to Numerical Continuation Methods. with Applications. Eusebius Doedel IIMAS-UNAM
|
|
|
- Hilda Sherman
- 5 years ago
- Views:
Transcription
1 An Introduction to Numerical Continuation Methods with Applications Eusebius Doedel IIMAS-UNAM July 28 - August 1, 2014
2 1 Persistence of Solutions Newton s method for solving a nonlinear equation [B83] 1 G(u) = 0, G( ), u R n, may not converge if the initial guess is not close to a solution. However, one can put a homotopy parameter in the equation. Actually, most equations already have parameters. We will discuss persistence of solutions to such equations. 1 See Page 83 + of the Background Notes on Elementary Numerical Methods.
3 2 The Implicit Function Theorem Let G : R n R R n satisfy (i) G(u 0, λ 0 ) = 0, u 0 R n, λ 0 R. (ii) G u (u 0, λ 0 ) is nonsingular (i.e., u 0 is an isolated solution), (iii) G and G u are smooth near u 0. Then there exists a unique, smooth solution family u(λ) such that G(u(λ), λ) = 0, for all λ near λ 0, u(λ 0 ) = u 0. NOTE : The IFT also holds in more general spaces
4 3 EXAMPLE : A Simple Homotopy. ( Course demo : Simple-Homotopy 2 ) Let g(u, λ) = (u 2 1) (u 2 4) + λ u 2 e 1 10 u. When λ = 0 the equation has four solutions, namely, g(u, 0) = 0, u = ± 1, and u = ± 2. We have g u (u, λ) λ=0 d du (u, λ) λ=0 = 4u 3 10u. 2 doedel/
5 4 Since we have g u (u, 0) = 4u 3 10u, g u ( 1, 0) = 6, g u ( 1, 0) = 6, g u ( 2, 0) = 12, g u ( 2, 0) = 12, which are all nonzero. Thus each of the four solutions when λ = 0 is isolated. Hence each of these solutions persists as λ becomes nonzero, ( at least for small values of λ ).
6 Solution families of g(u, λ) = 0. Note the fold. 5
7 6 NOTE : Each of the four solutions at λ = 0 is isolated. Thus each of these solutions persists as λ becomes nonzero. Only two of the four homotopies reach λ = 1. The other two homotopies meet at a fold. IFT condition (ii) is not satisfied at the fold. (Why not? )
8 7 In the equation let G(u, λ) = 0, u, G(, ) R n, λ R, x ( ) u λ. Then the equation can be written G(x) = 0, G : R n+1 R n. DEFINITION : A solution x 0 of G(x) = 0 is regular if the matrix G 0 x G x (x 0 ), (with n rows and n + 1 columns) has maximal rank, i.e., if Rank(G 0 x) = n.
9 8 In the parameter formulation, G(u, λ) = 0, we have Rank(G 0 x) = Rank(G 0 u G 0 λ) = n (i) G 0 u is nonsingular, or (ii) dim N (G 0 u) = 1, and G 0 λ R(G0 u). Here N (G 0 u) denotes the null space of G 0 u, and R(G 0 u) denotes the range of G 0 u, i.e., R(G 0 u) is the linear space spanned by the n columns of G 0 u.
10 9 COROLLARY (to the IFT) : Let x 0 ( u 0, λ 0 ) be a regular solution of G(x) = 0. Then, near x 0, there exists a unique one-dimensional solution family x(s) with x(0) = x 0. PROOF : Since Rank( G 0 x ) = Rank( G 0 u G 0 λ ) = n, we have that (i) either G 0 u is nonsingular and by the IFT we have u = u(λ) near x 0, (ii) or else we can interchange colums in the Jacobian G 0 x to see that the solution can locally be parametrized by one of the components of u. Thus a (locally) unique solution family passes through x 0. QED!
11 10 NOTE : Such a solution family is sometimes called a solution branch. Case (i) is where the IFT applies directly. Case (ii) is that of a simple fold. Thus even near a simple fold there is a unique solution family. However, near such a fold, the family cannot be parametrized by λ.
12 11 More Examples of IFT Application We give examples where the IFT shows that a given solution persists (at least locally ) when a problem parameter is changed. We also consider cases where the conditions of the IFT are not satisfied.
13 12 EXAMPLE : The A B C Reaction. ( Course demo : Chemical-Reactions/ABC-Reaction/Stationary ) u 1 = u 1 + D(1 u 1 )e u 3, u 2 = u 2 + D(1 u 1 )e u 3 Dσu 2 e u 3, u 3 = u 3 βu 3 + DB(1 u 1 )e u 3 + DBασu 2 e u 3, where 1 u 1 is the concentration of A, u 2 is the concentration of B, u 3 is the temperature, α = 1, σ = 0.04, B = 8, D is the Damkohler number, β > 0 is the heat transfer coefficient. NOTE : The zero stationary solution at D = 0 persists (locally), because the Jacobian is nonsingular there, having eigenvalues 1, 1, and (1 + β).
14 13 Families of stationary solutions of the A B C reaction. (From left to right : β = 1.1, 1.3, 1.5, 1.6, 1.7, 1.8. )
15 14 NOTE : In the preceding bifurcation diagram: u = u u u 2 3. Solid/dashed curves denote stable/unstable solutions. The red squares are Hopf bifurcations. From the basic theory of ODEs: u 0 is a stationary solution of u (t) = f(u(t)) if f(u 0 ) = 0. u 0 is stable if all eigenvalues of f u (u 0 ) are in the negative half-plane. u 0 is unstable if one or more eigenvalues are in the positive half-plane. At a fold there is zero eigenvalue. At a Hopf bifurcation there is a pair of purely imaginary eigenvalues.
16 15 EXAMPLE (of IFT application) : The Gelfand-Bratu Problem. ( Course demo : Gelfand-Bratu/Original ) The boundary value problem u (x) + λ e u(x) = 0, x [0, 1], u(0) = u(1) = 0, defines the stationary states of a solid fuel ignition model. If λ = 0 then u(x) 0 is a solution. This problem can be thought of as an operator equation G(u; λ) = 0. We can use (a generalized) IFT to prove that there is a solution family u = u(λ), for λ small.
17 16 The linearization of G(u; λ) acting on v, i.e., G u (u; λ)v, leads to the homogeneous equation v (x) + λ e u(x) v = 0, v(0) = v(1) = 0, which for the solution u(x) 0 at λ = 0 becomes v (x) = 0, v(0) = v(1) = 0. Since this equation only has the zero solution v(x) 0, the IFT applies. Thus (locally) a unique solution family passes through u(x) 0, λ = 0.
18 17 In Course demo : Gelfand-Bratu/Original the BVP is implemented as a first order system : u 1(t) = u 2 (t), u 2(t) = λ e u1(t), with boundary conditions u 1 (0) = 0, u 1 (1) = 0. A convenient solution measure in the bifurcation diagram is the value of 1 0 u 1 (x) dx.
19 Bifurcation diagram of the Gelfand-Bratu equation. 18
.")
20 Some solutions of the Gelfand-Bratu equation. (The solution at the fold is colored red ). 19
21 20 EXAMPLE : A Boundary Value Problem with Bifurcations. ( Course demo : Basic-BVP/Nonlinear-Eigenvalue ) u + ˆλ u(1 u) = 0, has u(x) 0 as a solution for all ˆλ. u(0) = u(1) = 0, QUESTION : Are there more solutions? Again, this problem corresponds to an operator equation G(u; ˆλ) = 0. Its linearization acting on v leads to the equation G u (u; ˆλ)v = 0, i.e., v + ˆλ (1 2u)v = 0, v(0) = v(1) = 0.
22 21 In particular, the linearization about the zero solution family u 0 is v + ˆλ v = 0, v(0) = v(1) = 0, which for most values of ˆλ only has the zero solution v(x) 0. However, when ˆλ = ˆλ k k 2 π 2, then there are nonzero solutions, namely, v(x) = sin(kπx), Thus the IFT does not apply at ˆλ k = k 2 π 2. (We will see that these solutions are bifurcation points.)
23 22 In the implementation we write the BVP as a first order system. We also use a scaled version of λ. The equations are then u 1 = u 2, u 2 = λ 2 π 2 u 1 (1 u 1 ), with ˆλ = λ 2 π 2. A convenient solution measure in the bifurcation diagram is γ u 2 (0) = u 1(0).
24 Solution families to the nonlinear eigenvalue problem. 23
25 Some solutions to the nonlinear eigenvalue problem. 24
26 25 Hopf Bifurcation THEOREM : Suppose that along a stationary solution family (u(λ), λ), of u = f(u, λ), a complex conjugate pair of eigenvalues α(λ) ± i β(λ), of f u (u(λ), λ) crosses the imaginary axis transversally, i.e., for some λ 0, α(λ 0 ) = 0, β(λ 0 ) 0, and α(λ 0 ) 0. Also assume that there are no other eigenvalues on the imaginary axis. Then there is a Hopf bifurcation, that is, a family of periodic solutions bifurcates from the stationary solution at (u 0, λ 0 ). NOTE : The assumptions imply that fu 0 is nonsingular, so that the stationary solution family is indeed (locally) a function of λ.
27 26 EXAMPLE : The A B C reaction. ( Course demo : Chemical-Reactions/ABC-Reaction/Homoclinic ) A stationary (blue) and a periodic (red) family of the A B C reaction for β = 1.2. The periodic orbits are stable and terminate in a homoclinic orbit.
28 The periodic family orbit family approaching a homoclinic orbit (black). The red dot is the Hopf point; the blue dot is the saddle point on the homoclinic. 27
29 28 Course demo : Chemical-Reactions/ABC-Reaction/Periodic Bifurcation diagram for β = 1.1, 1.3, 1.5, 1.6, 1.7, 1.8. (For periodic solutions u = 1 T T 0 u u u 2 3 dt, where T is the period.)
30 29 EXAMPLE : A Predator-Prey Model. ( Course demo : Predator-Prey/ODE/2D ) u 1 = 3u 1 (1 u 1 ) u 1 u 2 λ(1 e 5u 1 ), u 2 = u 2 + 3u 1 u 2. Here u 1 may be thought of as fish and u 2 as sharks, while the term λ (1 e 5u 1 ), represents fishing, with fishing-quota λ. When λ = 0 the stationary solutions are 3u 1 (1 u 1 ) u 1 u 2 = 0 u 2 + 3u 1 u 2 = 0 (u 1, u 2 ) = (0, 0), (1, 0), ( 1 3, 2).
31 30 The Jacobian matrix is G u (u 1, u 2 ; λ) = ( 3 6u1 u 2 5λe 5u 1 u 1 3u u 1 ) so that G u (0, 0 ; 0) = G u (1, 0 ; 0) = ( ( ) ; real eigenvalues 3, -1 (unstable) ) ; real eigenvalues -3, 2 (unstable) G u ( 1 3, 2 ; 0) = ( ) ; complex eigenvalues 1 2 ± i (stable) All three Jacobians at λ = 0 are nonsingular. Thus, by the IFT, all three stationary points persist for (small) λ 0.
32 31 In this problem we can explicitly find all solutions: Family 1 : (u 1, u 2 ) = (0, 0) Family 2 : u 2 = 0, λ = 3u 1(1 u 1 ) 1 e 5u 1 ( Note that lim u 1 0 λ = lim 3(1 2u 1 ) u 1 0 5e 5u 1 = 3 5 ) Family 3 : u 1 = 1 3, u 2 λ(1 e 5/3 ) = 0 u 2 = 2 3λ(1 e 5/3 ) These solution families intersect at two bifurcation points, one of which is (u 1, u 2, λ) = (0, 0, 3/5).
33 32 fish sharks quota Stationary solution families of the predator-prey model. Solid/dashed curves denote stable/unstable solutions. Note the bifurcations and Hopf bifurcation (red square).
34 fish quota Stationary solution families, showing fish versus quota. Solid/dashed curves denote stable/unstable solutions.
35 34 Stability of Family 1 : ( 3 5λ 0 G u (0, 0 ; λ) = 0 1 ) ; eigenvalues 3 5λ, 1. Hence the zero solution is : and unstable if λ < 3/5, stable if λ > 3/5. Stability of Family 2 : This family has no stable positive solutions.
36 35 Stability of Family 3 : At λ H 0.67 the complex eigenvalues cross the imaginary axis: This crossing is a Hopf bifurcation, Beyond λ H there are stable periodic solutions. Their period T increases as λ increases. The period becomes infinite at λ = λ This final orbit is a heteroclinic cycle.
37 min fish, max fish quota Stationary (blue) and periodic (red) solution families of the predator-prey model. ( For the periodic solution family both the maximum and minimum are shown. )

38 Periodic solutions of the predator-prey model. The largest orbits are close to a heteroclinic cycle. 37
39 38 The bifurcation diagram shows the solution behavior for (slowly) increasing λ : Family 3 is followed until λ H Periodic solutions of increasing period until λ = λ Collapse to trivial solution (Family 1).
40 39 Continuation of Solutions Parameter Continuation Suppose we have a solution (u 0, λ 0 ) of as well as the derivative u 0. G(u, λ) = 0, Here u du dλ. We want to compute the solution u 1 at λ 1 λ 0 + λ.
41 40 "u" u 0 u (0) u 1 u (= du d λ at λ 0 ) λ λ λ 0 1 λ Graphical interpretation of parameter-continuation.
42 41 To solve the equation G(u 1, λ 1 ) = 0, for u 1 (with λ = λ 1 fixed) we use Newton s method G u (u (ν) 1, λ 1 ) u (ν) 1 = G(u (ν) 1, λ 1 ), u (ν+1) 1 = u (ν) 1 + u (ν) 1. ν = 0, 1, 2,. As initial approximation use u (0) 1 = u 0 + λ u 0. If G u (u 1, λ 1 ) is nonsingular, and λ sufficiently small then this iteration will converge [B55].
43 42 After convergence, the new derivative u 1 is computed by solving G u (u 1, λ 1 ) u 1 = G λ (u 1, λ 1 ). This equation is obtained by differentiating with respect to λ at λ = λ 1. G(u(λ), λ) = 0, Repeat the procedure to find u 2, u 3,. NOTE : u 1 can be computed without another LU-factorization of G u (u 1, λ 1 ). Thus the extra work to compute u 1 is negligible.
44 43 EXAMPLE : The Gelfand-Bratu Problem. u (x) + λ e u(x) = 0 for x [0, 1], u(0) = 0, u(1) = 0. We know that if λ = 0 then u(x) 0 is an isolated solution. Discretize by introducing a mesh, 0 = x 0 < x 1 < < x N = 1, x j x j 1 = h, (1 j N), h = 1/N. The discrete equations are : u j+1 2u j + u j 1 h 2 + λ e u j = 0, j = 1,, N 1, with u 0 = u N = 0.
45 44 Let u u 1 u 2 u N 1. Then we can write the discrete equations as G( u, λ ) = 0, where G : R N 1 R R N 1.
46 45 Parameter-continuation : Suppose we have λ 0, u 0, and u 0. Set λ 1 = λ 0 + λ. Newton s method : for ν = 0, 1, 2,, with G u (u (ν) 1, λ 1 ) u (ν) 1 = G(u (ν) 1, λ 1 ), u (ν+1) 1 = u (ν) 1 + u (ν) 1, u (0) 1 = u 0 + λ u 0. After convergence compute u 1 from G u (u 1, λ 1 ) u 1 = G λ (u 1, λ 1 ). Repeat the procedure to find u 2, u 3,.
47 46 Here G u ( u, λ ) = 2 h 2 + λe u 1 1 h λe u h 2 h h h 2 2 h 2 + λe u N 1. Thus we must solve a tridiagonal system for each Newton iteration. NOTE : The solution family has a fold where parameter-continuation fails! A better continuation method is pseudo-arclength continuation. There are also better discretizations, namely collocation, as used in AUTO.
48 47 Pseudo-Arclength Continuation This method allows continuation of a solution family past a fold. It was introduced by H. B. Keller ( ) in Suppose we have a solution (u 0, λ 0 ) of G( u, λ ) = 0, as well as the normalized direction vector ( u 0, λ 0 ) of the solution family. Pseudo-arclength continuation consists of solving these equations for (u 1, λ 1 ) : G(u 1, λ 1 ) = 0, u 1 u 0, u 0 + (λ 1 λ 0 ) λ 0 s = 0.
49 48 "u" u 0 u 1 u 0 s 01 λ ( u, ) 0 λ 0 λ 0 λ 1 λ Graphical interpretation of pseudo-arclength continuation.
50 49 Solve the equations G(u 1, λ 1 ) = 0, u 1 u 0, u 0 + (λ 1 λ 0 ) λ 0 s = 0. for (u 1, λ 1 ) by Newton s method : (G1 u) (ν) u 0 (G 1 λ )(ν) λ 0 ( (ν) ) u 1 λ (ν) 1 = G(u (ν) 1, λ (ν) 1 ) u (ν) 1 u 0, u 0 + (λ (ν) 1 λ 0 ) λ 0 s. Compute the next direction vector by solving and normalize it. G1 u u 0 G 1 λ λ 0 ( u1 λ 1 ) = 0, 1
51 50 NOTE : We can compute ( u 1, λ 1 ) with only one extra backsubstitution. The orientation of the family is preserved if s is sufficiently small. Rescale the direction vector so that indeed u λ 2 1 = 1.
52 51 FACT : The Jacobian is nonsingular at a regular solution. ( ) u PROOF : Let x R λ n+1. Then pseudo-arclength continuation can be simply written as G(x 1 ) = 0, x 1 x 0, ẋ 0 s = 0, ( ẋ 0 = 1 ). x 0 s x 1 x 0 Pseudo-arclength continuation.
53 52 The pseudo-arclength equations are G(x 1 ) = 0, x 1 x 0, ẋ 0 s = 0, ( ẋ 0 = 1 ). The Jacobian matrix in Newton s method at s = 0 is ( ) G 0 x. ẋ 0 At a regular solution N (G 0 x) = Span{ẋ 0 }. We must show that ( ) G 0 x ẋ 0 is nonsingular at a regular solution.
54 53 If on the contrary ( ) G 0 x ẋ 0 is singular then for some vector z 0 we have : G 0 x z = 0, ẋ 0, z = 0, Since by assumption N (G 0 x) = Span{ẋ 0 }, we have z = c ẋ 0, for some constant c. But then 0 = ẋ 0, z = c ẋ 0, ẋ 0 = c ẋ 0 2 = c, so that z = 0, which is a contradiction. QED!
55 54 EXAMPLE : The Gelfand-Bratu Problem. Use pseudo-arclength continuation for the discretized Gelfand-Bratu problem. Then the matrix ( ) Gx ẋ = ( ) Gu G λ u λ, in Newton s method is a bordered tridiagonal matrix :. which can be decomposed very efficiently.
56 55 Following Folds and Hopf Bifurcations At a fold the the behavior of a system can change drastically. How does the fold location change when a second parameter varies? Thus we want the compute a locus of folds in 2 parameters. We also want to compute loci of Hopf bifurcations in 2 parameters.
57 56 Following Folds Treat both parameters λ and µ as unknowns, and compute a solution family X(s) ( u(s), φ(s), λ(s), µ(s) ), to F(X) G(u, λ, µ) = 0, G u (u, λ, µ) φ = 0, φ, φ 0 1 = 0, and the added continuation equation u u 0, u 0 + φ φ 0, φ0 + (λ λ 0 ) λ 0 + (µ µ 0 ) µ 0 s = 0. As before, ( u 0, φ0, λ0, µ 0 ), is the direction of the family at the current solution point ( u 0, φ 0, λ 0, µ 0 ).
58 57 EXAMPLE : The A B C Reaction. ( Course demo : Chemical-Reactions/ABC-Reaction/Folds-SS ) The equations are u 1 = u 1 + D(1 u 1 )e u 3, u 2 = u 2 + D(1 u 1 )e u 3 Dσu 2 e u 3, u 3 = u 3 βu 3 + DB(1 u 1 )e u 3 + DBασu 2 e u 3, where 1 u 1 is the concentration of A, u 2 is the concentration of B, u 3 is the temperature, α = 1, σ = 0.04, B = 8, D is the Damkohler number, β is the heat transfer coefficient.
59 58 A stationary solution family for β = Note the two folds and the Hopf bifurcation.
60 β β D D A locus of folds (with blow-up) for the A B C reaction. Notice the two cusp singularities along the 2-parameter locus. ( There is a swallowtail singularity in nearby 3-parameter space. )
61 u D Stationary solution families for β = 1.20, 1.21,, ( Open diamonds mark folds, solid red squares mark Hopf points. )
62 61 Following Hopf Bifurcations The extended system is f(u, λ, µ) = 0, F(u, φ, β, λ; µ) f u (u, λ, µ) φ i β φ = 0, φ, φ 0 1 = 0, where F : R n C n R 2 R R n C n C, and to which we want to compute a solution family ( u, φ, β, λ, µ ), with u R n, φ C n, β, λ, µ R. Above φ 0 belongs to a reference solution ( u 0, φ 0, β 0, λ 0, µ 0 ), which normally is the latest computed solution along a family.
63 62 EXAMPLE : The A B C Reaction. ( Course demo : Chemical-Reactions/ABC-Reaction/Hopf ) The stationary family with Hopf bifurcation for β = 1.20.
64 β D The locus of Hopf bifurcations for the A B C reaction.
65 u D Stationary solution families for β = 1.20, 1.20, 1.25, 1.30,, 2.30, with Hopf bifurcations (the red squares).
66 65 Boundary Value Problems Consider the first order system of ordinary differential equations u (t) f( u(t), µ, λ ) = 0, t [0, 1], where u( ), f( ) R n, λ R, µ R nµ, subject to boundary conditions b( u(0), u(1), µ, λ ) = 0, b( ) R n b, and integral constraints 1 0 q( u(s), µ, λ ) ds = 0, q( ) R nq.
67 66 This boundary value problem (BVP) is of the form where F( X ) = 0, X = ( u, µ, λ ), to which we add the continuation equation X X 0, Ẋ 0 s = 0, where X 0 represents the latest solution computed along the family. In detail, the continuation equation is 1 0 u(t) u 0 (t), u 0 (t) dt + µ µ 0, µ 0 + (λ λ 0 ) λ 0 s = 0.
68 67 NOTE : In the context of continuation we solve this BVP for (u( ), λ, µ). In order for problem to be formally well-posed we must have n µ = n b + n q n 0. A simple case is n q = 0, n b = n, for which n µ = 0.
69 68 Discretization: Orthogonal Collocation Introduce a mesh { 0 = t 0 < t 1 < < t N = 1 }, where h j t j t j 1, (1 j N), Define the space of (vector) piecewise polynomials P m h as P m h { p h C[0, 1] : p h [tj 1,t j ] P m }, where P m is the space of (vector) polynomials of degree m.
70 69 The collocation method consists of finding p h P m h, µ R nµ, such that the following collocation equations are satisfied : p h(z j,i ) = f( p h (z j,i ), µ, λ ), j = 1,, N, i = 1,, m, and such that p h satisfies the boundary and integral conditions. The collocation points z j,i in each subinterval [ t j 1, t j ], are the (scaled) roots of the mth-degree orthogonal polynomial (Gauss points 3 ). 3 See Pages 261, 287 of the Background Notes on Elementary Numerical Methods.
71 t t t t N t j-1 t j z j,1 z j,2 z j,3 t j-1 t j t j-2/3 t j-1/3 lj,3(t) lj,1(t) The mesh {0 = t 0 < t 1 < < t N = 1}, with collocation points and extended-mesh points shown for m = 3. Also shown are two of the four local Lagrange basis polynomials.
72 71 Since each local polynomial is determined by (m + 1) n, coefficients, the total number of unknowns (considering λ as fixed) is (m + 1) n N + n µ. This is matched by the total number of equations : collocation : m n N, continuity : (N 1) n, constraints : n b + n q ( = n + n µ ).
73 72 Assume that the solution u(t) of the BVP is sufficiently smooth. Then the order of accuracy of the orthogonal collocation method is m, i.e., p h u = O(h m ). At the main meshpoints t j we have superconvergence : max j p h (t j ) u(t j ) = O(h 2m ). The scalar variables λ and µ are also superconvergent.
74 73 Implementation For each subinterval [ t j 1, t j ], introduce the Lagrange basis polynomials { l j,i (t) }, j = 1,, N, i = 0, 1,, m, defined by where l j,i (t) = t j i m m k=0,k i t j i m t t j k m t j i m h j. t j k m The local polynomials can then be written m p j (t) = l j,i (t) u j i. m With the above choice of basis i=0, u j u(t j ) and u j i m where u(t) is the solution of the continuous problem. u(t j i ), m
75 74 The collocation equations are p j(z j,i ) = f( p j (z j,i ), µ, λ ), i = 1,, m, j = 1,, N. The boundary conditions are b i ( u 0, u N, µ, λ ) = 0, i = 1,, n b. The integral constraints can be discretized as N m j=1 i=0 ω j,i q k ( u j i m, µ, λ) = 0, k = 1,, n q, where the ω j,i are the Lagrange quadrature weights.
76 75 The continuation equation is 1 0 u(t) u 0 (t), u 0 (t) dt + µ µ 0, µ 0 + (λ λ 0 ) λ 0 s = 0, where ( u 0, µ 0, λ 0 ), is the previous solution along the solution family, and ( u 0, µ 0, λ0 ), is the normalized direction of the family at the previous solution. The discretized continuation equation is of the form N j=1 m i=0 ω j,i u j i m (u 0 ) j i m, ( u 0 ) j i m + µ µ 0, µ 0 + (λ λ 0 ) λ 0 s = 0.
77 76 Numerical Linear Algebra The complete discretization consists of m n N + n b + n q + 1, nonlinear equations, with unknowns {u j i } R mnn+n, µ R nµ, λ R. m These equations are solved by a Newton-Chord iteration.
78 77 We illustrate the numerical linear algebra for the case n = 2 ODEs, N = 4 mesh intervals, m = 3 collocation points, n b = 2 boundary conditions, n q = 1 integral constraint, and the continuation equation. The operations are also done on the right hand side, which is not shown. Entries marked have been eliminated by Gauss elimination. Entries marked denote fill-in due to pivoting. Most of the operations can be done in parallel.
79 78 u 0 u 1 3 u 2 3 u 1 u 2 u 3 u N µ λ The structure of the Jacobian.
80 79 u 0 u 1 3 u 2 3 u 1 u 2 u 3 u N µ λ The system after condensation of parameters, which can be done in parallel.
81 80 u 0 u 1 3 u 2 3 u 1 u 2 u 3 u N µ λ The preceding matrix, showing the decoupled subsystem.
82 81 u 0 u 1 3 u 2 3 u 1 u 2 u 3 u N µ λ Stage 1 of the nested dissection to solve the decoupled subsystem.
83 82 u 0 u 1 3 u 2 3 u 1 u 2 u 3 u N µ λ Stage 2 of the nested dissection to solve the decoupled subsystem.
84 83 u 0 u 1 3 u 2 3 u 1 u 2 u 3 u N µ λ The preceding matrix showing the final decoupled subsystem.
85 84 u 0 u 1 3 u 2 3 u 1 u 2 u 3 u N µ λ A A B B A A B B The approximate Floquet multipliers are the eigenvalues of M B 1 A.
86 85 Accuracy Test The Table shows the location of the fold in the Gelfand-Bratu problem, for 4 Gauss collocation points per mesh interval, and N mesh intervals. N Fold location
87 86 Periodic Solutions Periodic solutions can be computed efficiently using a BVP approach. This method also determines the period very accurately. Moreover, the technique can compute unstable periodic orbits.
88 87 Consider u (t) = f( u(t), λ ), u( ), f( ) R n, λ R. Fix the interval of periodicity by the transformation t t T. Then the equation becomes u (t) = T f( u(t), λ ), u( ), f( ) R n, T, λ R. and we seek solutions of period 1, i.e., u(0) = u(1). Note that the period T is one of the unknowns.
89 88 The above equations do not uniquely specify u and T : Assume that we have computed ( u k 1 ( ), T k 1, λ k 1 ), and we want to compute the next solution ( u k ( ), T k, λ k ). Then u k (t) can be translated freely in time : If u k (t) is a periodic solution, then so is u k (t + σ), for any σ. Thus, a phase condition is needed.
90 89 An example is the Poincaré phase condition u k (0) u k 1 (0), u k 1(0) = 0. ( But we will derive a numerically more suitable integral phase condition. ) u k-1 (0) u k-1 (0) u (0) k Graphical interpretation of the Poincaré phase condition.
91 90 An Integral Phase Condition If ũ k (t) is a solution then so is for any σ. ũ k (t + σ), We want the solution that minimizes D(σ) 1 0 ũ k (t + σ) u k 1 (t) 2 2 dt. The optimal solution ũ k (t + ˆσ), must satisfy the necessary condition D (ˆσ) = 0.
92 91 Differentiation gives the necessary condition Writing 1 0 ũ k (t + ˆσ) u k 1 (t), ũ k(t + ˆσ dt = 0. u k (t) ũ k (t + ˆσ), gives 1 0 u k (t) u k 1 (t), u k(t) dt = 0. Integration by parts, using periodicity, gives 1 u 0 k (t), u k 1 (t) dt = 0. This is the integral phase condition.
93 92 Continuation of Periodic Solutions Pseudo-arclength continuation is used to follow periodic solutions. It allows computation past folds along a family of periodic solutions. It also allows calculation of a vertical family of periodic solutions. For periodic solutions the continuation equation is 1 0 u k (t) u k 1 (t), u k 1 (t) dt + (T k T k 1 ) T k 1 + (λ k λ k 1 ) λ k 1 = s.
94 93 SUMMARY : We have the following equations for periodic solutions : u k(t) = T f( u k (t), λ k ), u k (0) = u k (1), 1 0 u k (t), u k 1(t) dt = 0, with continuation equation 1 0 u k (t) u k 1 (t), u k 1 (t) dt + (T k T k 1 ) T k 1 + (λ k λ k 1 ) λ k 1 = s, where u( ), f( ) R n, λ, T R.
95 94 Stability of Periodic Solutions In our continuation context, a periodic solution of period T satisfies u (t) = T f( u(t)), for t [0, 1], u(0) = u(1), (for given value of the continuation parameter λ). A small perturbation in the initial condition u(0) + ɛ v(0), ɛ small, leads to the linearized equation v (t) = T f u ( u(t) ) v(t), for t [0, 1], which induces a linear map v(0) v(1), represented by v(1) = M v(0).
96 95 v(1) = M v(0) The eigenvalues of M are the Floquet multipliers that determine stability. M always has a multiplier µ = 1, since differentiating u (t) = T f( u(t)), gives where v (t) = T f u ( u(t) ) v(t), v(t) = u (t), with v(0) = v(1).
97 96 v(1) = M v(0) If M has a Floquet multiplier µ with µ > 1 then u(t) is unstable. If all multipliers (other than µ = 1) satisfy µ < 1 then u(t) is stable. At folds and branch points there are two multipliers µ = 1. At a period-doubling bifurcation there is a real multiplier µ = 1. At a torus bifurcation there is a complex pair on the unit circle.
98 97 EXAMPLE : The Lorenz Equations. ( Course demo : Lorenz ) These equations were introduced in 1963 by Edward Lorenz ( ) as a simple model of atmospheric convection : x = σ (y x), y = ρ x y x z, z = x y β z, where (often) σ = 10, β = 8/3, ρ = 28.
99 98 Course demo : Lorenz/Basic Bifurcation diagram of the Lorenz equations for σ = 10 and β = 8/3.

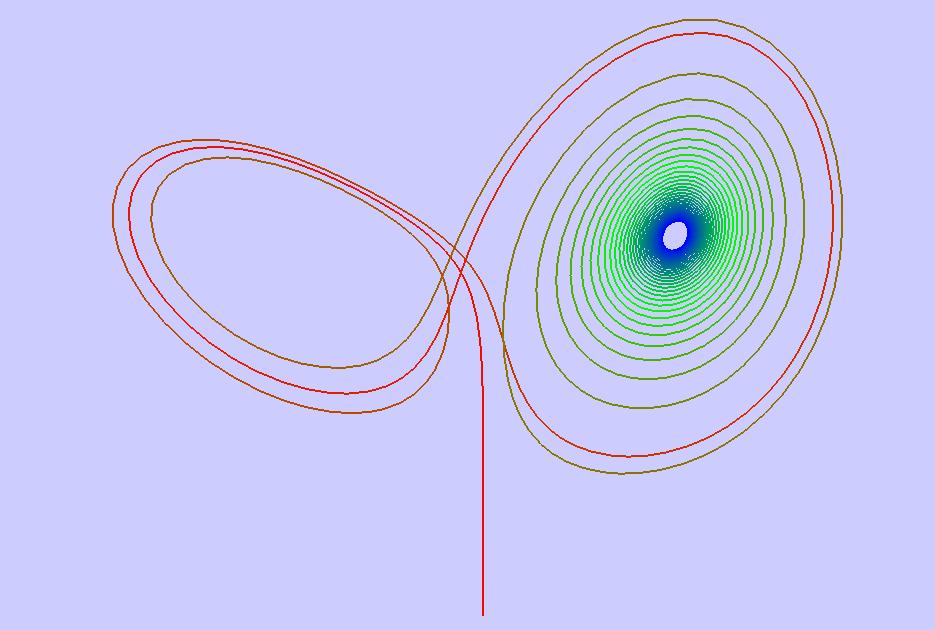
100 99 Course demo : Lorenz/Basic Unstable periodic orbits of the Lorenz equations.
101 100 In the Lorenz Equations : The zero stationary solution is unstable for ρ > 1. Two nonzero stationary families bifurcate at ρ = 1. The nonzero stationary solutions are unstable for ρ > ρ H. At ρ H 24.7 there are Hopf bifurcations. Unstable periodic solution families emanate from the Hopf bifurcations. These families end in homoclinic orbits (infinite period) at ρ At ρ = 28 (and a range of other values) there is the Lorenz attractor.
102 101 EXAMPLE : The A B C Reaction. ( Course demo : Chemical-Reactions/ABC-Reaction/Periodic ) Stationary and periodic solution families of the A B C reaction: β = Note the coexistence of stable solutions, for example, solutions 1 and 2.
103 max u3 6 5 max u D D max u3 6 5 max u D D Top left: β = 1.55, right: β = 1.56, Bottom left: β = 1.57, right: β = ( QUESTION : Is something missing somewhere? )
104 103 Following Folds for Periodic Solutions Recall that periodic orbits families can be computed using the equations u (t) T f( u(t), λ ) = 0, u(0) u(1) = 0, 1 0 u(t), u 0(t) dt = 0, where u 0 is a reference orbit, typically the latest computed orbit. The above boundary value problem is of the form where F( X, λ ) = 0, X = ( u, T ).
105 104 At a fold with respect to λ we have F X ( X, λ ) Φ = 0, where Φ, Φ = 1, X = ( u, T ), Φ = ( v, S ), i.e., the linearized equations about X have a nonzero solution Φ. In detail : v (t) T f u ( u(t), λ ) v S f( u(t), λ ) = 0, v(0) v(1) = 0, 1 0 v(t), u 0(t) dt = 0, 1 0 v(t), v(t) dt + S 2 = 1.
106 105 The complete extended system to follow a fold is F( X, λ, µ ) = 0, F X ( X, λ, µ ) Φ = 0, Φ, Φ 1 = 0, with two free problem parameters λ and µ. To the above we add the continuation equation X X 0, Ẋ 0 + Φ Φ 0, Φ0 + (λ λ 0 ) λ 0 + (µ µ 0 ) µ 0 s = 0.
107 106 In detail : u (t) T f( u(t), λ, µ ) = 0, 1 0 u(0) u(1) = 0, u(t), u 0(t) dt = 0, v (t) T f u ( u(t), λ, µ ) v S f( u(t), λ, µ ) = 0, with normalization v(0) v(1) = 0, v(t), u 0(t) dt = 0, 0 v(t), v(t) dt + S 2 1 = 0, and continuation equation 1 0 u(t) u 0 (t), u 0 (t) dt v(t) v 0 (t), v 0 (t) dt + + (T 0 T ) T 0 + (S 0 S)Ṡ0 + (λ λ 0 ) λ 0 + (µ µ 0 ) µ 0 s = 0.
108 107 EXAMPLE : The A B C Reaction. ( Course demo : Chemical-Reactions/ABC-Reaction/Folds-PS ) Stationary and periodic solution families of the A B C reaction. (with blow-up) for β = Note the three folds, labeled 1, 2, 3.
109 β D Loci of folds along periodic solution families for the A B C reaction.
110 Stationary and periodic solution families of the A B C reaction: β =
111 max u D Stationary and periodic solution families of the A B C reaction: β = 1.57.
112 Stationary and periodic solution families of the A B C reaction: β =
113 Stationary and periodic solution families of the A B C reaction: β =
114 Stationary and periodic solution families of the A B C reaction: β =

115 Periodic solutions along the isola for β = (Stable solutions are blue, unstable solutions are red.) 114
116 115 Following Period-doubling Bifurcations Let ( u(t), T ) be a periodic solution, i.e., a solution of u (t) T f( u(t), λ ) = 0, 1 where u 0 is a reference orbit. 0 u(0) u(1) = 0, u(t), u 0(t) dt = 0, A necessary condition for a period-doubling bifurcation is that the following linearized system have a nonzero solution v(t) : v (t) T f u ( u(t), λ ) v(t) = 0, 1 0 v(0) + v(1) = 0, v(t), v(t) dt = 1.
117 116 The complete extended system to follow a period-doubling bifurcation is u (t) T f( u(t), λ, µ ) = 0, 1 0 u(0) u(1) = 0, u(t), u 0(t) dt = 0, v (t) T f u ( u(t), λ ) v(t) = 0, 1 and continuation equation 1 0 u(t) u 0 (t), u 0 (t) dt + 0 v(0) + v(1) = 0, v(t), v(t) dt 1 = 0, 1 0 v(t) v 0 (t), v 0 (t) dt + + (T 0 T ) T 0 + (λ λ 0 ) λ 0 + (µ µ 0 ) µ 0 s = 0.
118 117 EXAMPLE : Period-Doubling Bifurcations in the Lorenz Equations. ( Course demo : Lorenz/Period-Doubling ) The Lorenz equations also have period-doubling bifurcations. In fact, there is a period-doubling cascade for large ρ. We start from numerical data. (Such data may be from simulation, i.e., initial value integration.) We also want to compute loci of period-doubling bifurcations.
119 118 ( Course demo : Lorenz/Period-Doubling ) Left panel : Solution families of the Lorenz equations. The open diamonds denote period-doubling bifurcations. Right panel : Solution 1 was found by initial value integration.
120 119 ( Course demo : Lorenz/Period-Doubling ) Left panel : Right panel : A primary period-doubled solution. A secondary period-doubled solution.
121 120 ( Course demo : Lorenz/Period-Doubling ) Loci of period-doubling bifurcations for the Lorenz equations (with blow-up). Black: primary, Red: secondary, Blue: tertiary period-doublings.
122 121 Periodic Solutions of Conservative Systems EXAMPLE : A Model Conservative System. ( Course demo : Vertical-HB ) u 1 = u 2, u 2 = u 1 (1 u 1 ). PROBLEM : This system has a family of periodic solutions, but no parameter! The system has a constant of motion, namely the Hamiltonian H(u 1, u 2 ) = 1 2 u u u3 1.
123 122 REMEDY : Introduce an unfolding term with unfolding parameter λ : u 1 = λ u 1 u 2, u 2 = u 1 (1 u 1 ). Then there is a vertical Hopf bifurcation from the trivial solution at λ = 0.
124 Bifurcation diagram of the vertical Hopf bifurcation problem. ( Course demo : Vertical-HB ) 123
125 124 NOTE : The family of periodic solutions is vertical. The parameter λ is solved for in each continuation step. Upon solving, λ is found to be zero, up to numerical precision. One can use standard BVP continuation and bifurcation algorithms.
126 A phase plot of some periodic solutions. 125
127 126 EXAMPLE : The Circular Restricted 3-Body Problem (CR3BP). ( Course demo : Restricted-3Body/Earth-Moon/Orbits ) x = 2y + x y = 2x + y z (1 µ) z = r1 3 (1 µ) (x + µ) r 3 1 (1 µ) y r 3 1 µ z r 3 2, µ y r 3 2 µ (x 1 + µ) r 3 2,, where r 1 = (x + µ) 2 + y 2 + z 2, r 2 = (x 1 + µ) 2 + y 2 + z 2. and ( x, y, z ) denotes the position of the zero-mass body. NOTE : For the Earth-Moon system µ
128 127 The CR3BP has one integral of motion, namely, the Jacobi-constant : J = x 2 + y 2 + z 2 2 U(x, y, z) µ 1 µ 2, where and U = 1 2 (x2 + y 2 ) + 1 µ r 1 + µ r 2, r 1 = (x + µ) 2 + y 2 + z 2, r 2 = (x 1 + µ) 2 + y 2 + z 2.
129 128 Boundary value formulation : x = T v x y = T v y z = T v z v x = T [ 2v y + x (1 µ)(x + µ)r1 3 µ(x 1 + µ)r2 3 + λ v x ] v y = T [ 2v x + y (1 µ)yr1 3 µyr2 3 + λ v y ] v z = T [ (1 µ)zr1 3 µzr2 3 + λ v z ] with periodicity boundary conditions x(1) = x(0), y(1) = y(0), z(1) = z(0), v x (1) = v x (0), v y (1) = v y (0), v z (1) = v z (0), + phase constraint + continuation equation. Here T is the period of the orbit.
130 129 NOTE : One can use BVP continuation and bifurcation algorithms. The unfolding term λ v regularizes the continuation. λ will be zero, once solved for. Other unfolding terms are possible.

131 Schematic bifurcation diagram of periodic solution families of the Earth-Moon system. 130

132 The planar Lyapunov family L1. 131

133 The Halo family H1. 132

134 The Halo family H1. 133

135 The Vertical family V1. 134

136 The Axial family A1. 135
137 136 Stable and Unstable Manifolds EXAMPLE : Phase-plane orbits: Fixed length. These can be computed by orbit continuation. Model equations are x = ɛx y 3, where ɛ > 0 is small. y = y + x 3. There is only one equilibrium, namely, (x, y) = (0, 0). This equilibrium has eigenvalues ɛ and 1 ; it is a source.
138 137 For the computations : The time variable t is scaled to [0, 1]. The actual integration time T is then an explicit parameter : x = T ( ɛx y 3 ), y = T ( y + x 3 ).
139 138 These constraints are used : To put the initial point on a small circle around the origin : x(0) r cos(2πθ) = 0, y(0) r sin(2πθ) = 0. To keep track of the end points : x(1) x 1 = 0, y(1) y 1 = 0. To keep track of the length of the orbits 1 0 x (t) 2 + y (t) 2 dt L = 0.
140 139 The computations are done in 3 stages : In the first run an orbit is grown by continuation : - The free parameters are T, L, x 1, y 1. - The starting point is on the small circle of radius r. - The starting point is in the strongly unstable direction. - The value of ɛ is 0.5 in the first run. In the second run the value of ɛ is decreased to 0.01 : - The free parameters are ɛ, T, x 1, y 1. In the third run the initial point is free to move around the circle : - The free parameters are θ, T, x 1, y 1.
")

141 140 ( Course demo : Basic-Manifolds/2D-ODE/Fixed-Length ) Unstable Manifolds in the Plane: Orbits of Fixed Length. (The right-hand panel is a blow-up, and also shows fewer orbits.)
142 141 EXAMPLE : Phase-plane orbits: Variable length. These can also be computed by orbit continuation. Model equations are x = ɛx y 2, y = y + x 2. The origin (x, y) = (0, 0) is an equilibrium. The origin has eigenvalues ɛ and 1 ; it is a source. Thus the origin has a 2-dimensional unstable manifold. We compute this stable manifold using continuation. (The equations are 2D; so we actually compute a phase portrait.)
143 142 For the computations : The time variable t is scaled to [0, 1]. The actual integration time T is then an explicit parameter : x = T (ɛx y 2 ), y = T (y + x 2 ). NOTE : There is also a nonzero equilibrium (x, y) = (ɛ 1 3, ɛ 2 3 ). It is a saddle (1 positive, 1 negative eigenvalue).
144 143 These constraints are used : To put the initial point on a small circle at the origin : x(0) r cos(2πθ) = 0, y(0) r sin(2πθ) = 0. To keep track of the end points : x(1) x 1 = 0, y(1) y 1 = 0. To keep track of the length of the orbits we add an integral constraint : 1 0 x (t) 2 + y (t) 2 dt L = 0. To allow the length L to contract : (T max T )(L max L) c = 0.
145 144 Again the computations are done in 3 stages : In the first run an orbit is grown by continuation : - The free parameters are T, L, x 1, y 1, c. - The starting point is on a small circle of radius r. - The starting point is in the strongly unstable direction. - In this first run ɛ = 0.5. In the second run the value of ɛ is decreased to 0.05 : - The free parameters are ɛ, T, L, x 1, y 1. In the third run the initial point is free to move around the circle : - The free parameters are θ, T, L, x 1, y 1.


146 145 ( Course demo : Basic-Manifolds/2D-ODE/Variable-Length ) Unstable Manifolds in the Plane: Orbits of Variable Length.


147 146 ( Course demo : Basic-Manifolds/2D-ODE/Variable-Length ) Unstable Manifolds in the Plane: Orbits of Variable Length (Blow-up).
148 147 EXAMPLE : A 2D unstable manifold in R 3. This can also be computed by orbit continuation. The model equations are x = ɛx z 3, y = y x 3, z = z + x 2 + y 2. We take ɛ = The origin is a saddle with eigenvalues ɛ, 1, and 1. Thus the origin has a 2-dimensional unstable manifold. The initial point moves around a circle in the 2D unstable eigenspace. The equations are 3D; so we will compute a 2D manifold in R 3. There is also a nonzero saddle, so we use retraction. The set-up is similar to the 2D phase-portrait example.


149 148 ( Course demo : Basic-Manifolds/3D-ODE/Variable-Length ) Unstable Manifolds in R 3 : Orbits of Variable Length.
150 149 EXAMPLE : Another 2D unstable manifold in R 3. The model equations are x = ɛx y 3 + z 3, y = y + x 3 + z 3, z = z x 2 + y 2. We take ɛ = The origin is a saddle with eigenvalues ɛ, 1, and 1. Thus the origin has a 2-dimensional unstable manifold. The initial point moves around a circle in the 2D unstable eigenspace. The equations are 3D; so we will compute a 2D manifold in R 3. No retraction is needed, so we choose to compute orbits of fixed length. The set-up is similar to the 2D phase-portrait example.


151 150 ( Course demo : Basic-Manifolds/3D-ODE/Fixed-Length ) Unstable Manifolds in R 3 : Orbits of Fixed Length.
152 151 The Lorenz Manifold For ρ > 1 the origin is a saddle point. The Jacobian has two negative and one positive eigenvalue. The two negative eigenvalues give rise to a 2D stable manifold. This manifold is known as as the Lorenz Manifold. The set-up is as for the earlier 3D model, using fixed length.


153 152 Course demo : Lorenz/Manifolds/Origin/Fixed-Length Part of the Lorenz Manifold (with blow-up). Orbits have fixed length L = 60.

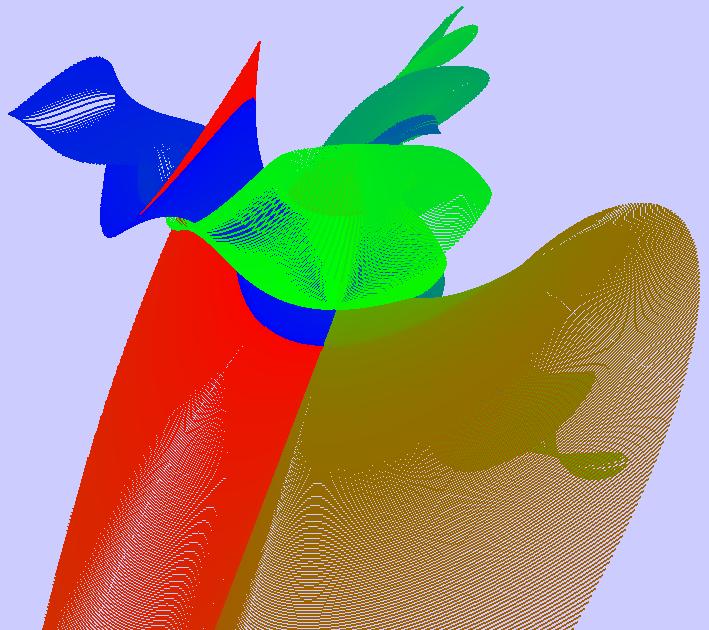
154 153 Course demo : Lorenz/Manifolds/Origin/Fixed-Length Part of the Lorenz Manifold. Orbits have fixed length L = 200.
155 154 Heteroclinic Connections. The Lorenz Manifold helps understand the Lorenz attractor. Many orbits in the manifold depend sensitively on initial conditions. During the manifold computation one can locate heteroclinic orbits. These are also in the 2D unstable manifold of the nonzero equilibria. The heteroclinic orbits have a combinatorial structure 4. One can also continue heteroclinic orbits as ρ varies. 4 Nonlinearity 19, 2006,


156 155 Course demo : Lorenz/Heteroclinics Four heteroclinic orbits with very close initial conditions
157 156 One can also determine the intersection of the Lorenz manifold with a sphere. The set-up is as follows : x = T σ (y x), y = T (ρ x y x z), z = T (x y β z), which is of the form u (t) = T f( u(t) ), for 0 t 1, where T is the actual integration time, which is negative! To this we add boundary and integral constraints.
158 157 The complete set-up consists of the ODE u (t) = T f( u(t) ), for 0 t 1, subject to the following constraints : u(0) ɛ (cos(θ) v 1 sin(θ) v 2 ) = 0 u(0) is on a small circle u(1) u 1 = 0 to keep track of the end point u(1) u 1 R = 0 distance of u 1 to the origin u 1 / u 1, f(u 1 )/ f(u 1 ) τ = 0 to locate tangencies, where τ = 0 T 1 0 f(u) ds L = 0 to keep track of the orbit length (T T n ) (L L n ) c = 0. allows retraction into the sphere
159 158 The continuation system has the form F(X k ) = 0, where X = ( u( ), Λ ). with continuation equation X k X k 1, Ẋ k 1 s = 0, ( Ẋk 1 = 1 ). The computations are done in 2 stages : In the first run an orbit is grown by continuation : - The starting point is on the small circle of radius ɛ. - The starting point is in the strongly stable direction. - The free parameters are Λ = (T, L, c, τ, R, u 1 ). In the second run the orbit sweeps the stable manifold. - The initial point is free to move around the circle : - The free parameters are Λ = (T, L, θ, τ, R, u 1 ).

160 159 Course demo : Lorenz/Manifolds/Origin/Sphere Intersection of the Lorenz Manifold with a sphere
161 160 NOTE : We do not just change the initial point (i.e., θ) and integrate! Every continuation step requires solving a boundary value problem. The continuation stepsize s controls the change in X. X can only change a little in any continuation step. This way the entire manifold (up to a given length L) is computed. The retraction constraint allows the orbits to retract into the sphere. This is necessary when heteroclinic connections are encountered.
162 161 EXAMPLE : Unstable Manifolds of a Periodic Orbit. ( Course demo : Lorenz/Manifolds/Orbits/Rho24.3 ) Left: Bifurcation diagram of the Lorenz equations. Right: Labeled solutions.




163 Both sides of the unstable manifold of periodic orbit 3 at ρ =
164 163 EXAMPLE : Unstable Manifolds in the CR3BP. ( Course demo : Restricted-3Body/Earth-Moon/Manifolds/H1 ) Small Halo orbits have one real Floquet multiplier outside the unit circle. Such Halo orbits are unstable. They have a 2D unstable manifold. The unstable manifold can be computed by continuation. First compute a starting orbit in the manifold. Then continue the orbit keeping, for example, x(1) fixed.



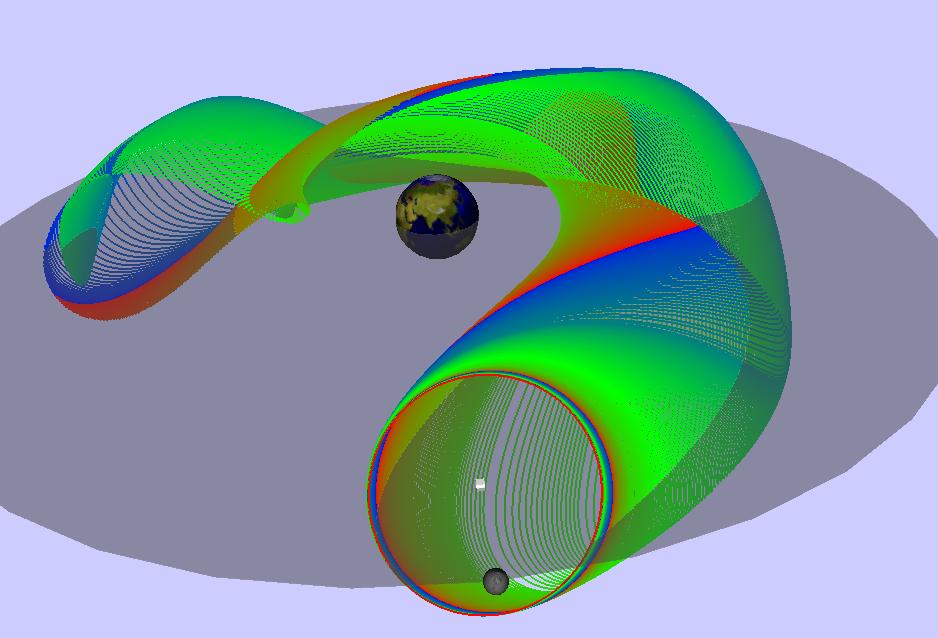
165 Part of the unstable manifold of three Earth-Moon L1-Halo orbits. 164
166 165 The initial orbit can be taken to be much longer Continuation with x(1) fixed can lead to a Halo-to-torus connection!
167 166 The Halo-to-torus connection can be continued as a solution to F( X k ) = 0, < X k X k 1, Ẋ k 1 > s = 0. where X = ( Halo orbit, Floquet function, connecting orbit).
168 167 In detail, the continuation system is du dτ T uf(u(τ), µ, l) = 0, 1 0 u(1) u(0) = 0, u(τ), u 0 (τ) dτ = 0, dv dτ T ud u f(u(τ), µ, l)v(τ) + λ u v(τ) = 0, v(1) sv(0) = 0 (s = ±1), v(0), v(0) 1 = 0, dw dτ T wf(w(τ), µ, 0) = 0, w(0) (u(0) + εv(0)) = 0, w(1) x x Σ = 0.
169 168 The system has 18 ODEs, 20 boundary conditions, 1 integral constraint. We need = 4 free parameters. Parameters : An orbit in the unstable manifold: T w, l, T u, x Σ Compute the unstable manifold: T w, l, T u, ε Follow a connecting orbit: λ u, l, T u, ε


170 169


171 170

172 171
173 172 The Solar Sail Equations The equations in Course demo : Solar-Sail/Equations/equations.f90 : where x = 2y + x (1 µ)(x + µ) d 3 S y = 2x + y z = (1 µ)z d 3 S (1 µ)y d 3 S µz d 3 P µ(x 1 + µ) d 3 P µy d 3 P + β(1 µ)d2 N x d 2 S + β(1 µ)d2 N y d 2 S + β(1 µ)d2 N z d 2 S d S = (x + µ) 2 + y 2 + z 2, d P = (x 1 + µ) 2 + y 2 + z 2, r = (x + µ) 2 + y 2 N x = [cos(α)(x + µ) sin(α)y] [cos(δ) sin(δ)z ]/d S r N y = [cos(α)y + sin(α)(x + µ)] [cos(δ) sin(δ)z ]/d S r N z = [cos(δ)z + sin(δ)r]/d S, D = x + µ N x + y N y + z N z d S d S d S

174 173 Course demo : Solar-Sail/Sun-Jupiter/Libration/Points Sun-Jupiter libration points, for β = 0, α = 0, δ = 0.
175 174 Course demo : Solar-Sail/Sun-Jupiter/Libration/Points Sun-Jupiter libration points, for β = 0.02, α = 0.02, δ = 0.

176 175 Course demo : Solar-Sail/Sun-Jupiter/Libration/Loci Sun-Jupiter libration points, with δ [ π, π ], for various β, with α =
177 176 Course demo : Solar-Sail/Sun-Jupiter/Libration/Loci Sun-Jupiter libration points, with δ [ π, π ], for various α, with β =

178 177 Course demo : Solar-Sail/Sun-Jupiter/Libration/Homoclinic Sun-Jupiter: detection of a homoclinic orbit at β = , with α = 0, δ = 0.

179 178 Course demo : Solar-Sail/Sun-Jupiter/Libration/Manifolds Sun-Jupiter: unstable manifold orbits for δ [ π, π ], with β = 0.05, α =
180 179 Course demo : Solar-Sail/Sun-Jupiter/Libration/Manifolds z z(t ) x The libration points y(t ) The end points



181 180 Course demo : Solar-Sail/Sun-Jupiter/Libration/Manifolds Some connecting orbits for α = 0.07 and varying β and δ.

182 181 Course demo : Solar-Sail/Sun-Jupiter/Orbits V 1 -orbits with β = 0.15, T = , δ [0, ].
An Introduction to Numerical Continuation Methods. with Application to some Problems from Physics. Eusebius Doedel. Cuzco, Peru, May 2013
 An Introduction to Numerical Continuation Methods with Application to some Problems from Physics Eusebius Doedel Cuzco, Peru, May 2013 Persistence of Solutions Newton s method for solving a nonlinear equation
An Introduction to Numerical Continuation Methods with Application to some Problems from Physics Eusebius Doedel Cuzco, Peru, May 2013 Persistence of Solutions Newton s method for solving a nonlinear equation
Computational Methods in Dynamical Systems and Advanced Examples
 and Advanced Examples Obverse and reverse of the same coin [head and tails] Jorge Galán Vioque and Emilio Freire Macías Universidad de Sevilla July 2015 Outline Lecture 1. Simulation vs Continuation. How
and Advanced Examples Obverse and reverse of the same coin [head and tails] Jorge Galán Vioque and Emilio Freire Macías Universidad de Sevilla July 2015 Outline Lecture 1. Simulation vs Continuation. How
Lecture Notes on Numerical Analysis of Nonlinear Equations
 Lecture Notes on Numerical Analysis of Nonlinear Equations Eusebius J Doedel Department of Computer Science, Concordia University, Montreal, Canada Numerical integrators can provide valuable insight into
Lecture Notes on Numerical Analysis of Nonlinear Equations Eusebius J Doedel Department of Computer Science, Concordia University, Montreal, Canada Numerical integrators can provide valuable insight into
Numerical Continuation of Bifurcations - An Introduction, Part I
 Numerical Continuation of Bifurcations - An Introduction, Part I given at the London Dynamical Systems Group Graduate School 2005 Thomas Wagenknecht, Jan Sieber Bristol Centre for Applied Nonlinear Mathematics
Numerical Continuation of Bifurcations - An Introduction, Part I given at the London Dynamical Systems Group Graduate School 2005 Thomas Wagenknecht, Jan Sieber Bristol Centre for Applied Nonlinear Mathematics
LECTURE NOTES ELEMENTARY NUMERICAL METHODS. Eusebius Doedel
 LECTURE NOTES on ELEMENTARY NUMERICAL METHODS Eusebius Doedel TABLE OF CONTENTS Vector and Matrix Norms 1 Banach Lemma 20 The Numerical Solution of Linear Systems 25 Gauss Elimination 25 Operation Count
LECTURE NOTES on ELEMENTARY NUMERICAL METHODS Eusebius Doedel TABLE OF CONTENTS Vector and Matrix Norms 1 Banach Lemma 20 The Numerical Solution of Linear Systems 25 Gauss Elimination 25 Operation Count
Lecture 5. Numerical continuation of connecting orbits of iterated maps and ODEs. Yu.A. Kuznetsov (Utrecht University, NL)
") Lecture 5 Numerical continuation of connecting orbits of iterated maps and ODEs Yu.A. Kuznetsov (Utrecht University, NL) May 26, 2009 1 Contents 1. Point-to-point connections. 2. Continuation of homoclinic
Lecture 5 Numerical continuation of connecting orbits of iterated maps and ODEs Yu.A. Kuznetsov (Utrecht University, NL) May 26, 2009 1 Contents 1. Point-to-point connections. 2. Continuation of homoclinic
An introduction to numerical continuation with AUTO
 An introduction to numerical continuation with AUTO Jennifer L. Creaser EPSRC Centre for Predictive Modelling in Healthcare University of Exeter j.creaser@exeter.ac.uk Internal 20 October 2017 AUTO Software
An introduction to numerical continuation with AUTO Jennifer L. Creaser EPSRC Centre for Predictive Modelling in Healthcare University of Exeter j.creaser@exeter.ac.uk Internal 20 October 2017 AUTO Software
NBA Lecture 1. Simplest bifurcations in n-dimensional ODEs. Yu.A. Kuznetsov (Utrecht University, NL) March 14, 2011
 March 14, 2011") NBA Lecture 1 Simplest bifurcations in n-dimensional ODEs Yu.A. Kuznetsov (Utrecht University, NL) March 14, 2011 Contents 1. Solutions and orbits: equilibria cycles connecting orbits other invariant sets
NBA Lecture 1 Simplest bifurcations in n-dimensional ODEs Yu.A. Kuznetsov (Utrecht University, NL) March 14, 2011 Contents 1. Solutions and orbits: equilibria cycles connecting orbits other invariant sets
8.1 Bifurcations of Equilibria
 1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
Half of Final Exam Name: Practice Problems October 28, 2014
 Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
The Computation of Periodic Solutions of the 3-Body Problem Using the Numerical Continuation Software AUTO
 The Computation of Periodic Solutions of the 3-Body Problem Using the Numerical Continuation Software AUTO Donald Dichmann Eusebius Doedel Randy Paffenroth Astrodynamics Consultant Computer Science Applied
The Computation of Periodic Solutions of the 3-Body Problem Using the Numerical Continuation Software AUTO Donald Dichmann Eusebius Doedel Randy Paffenroth Astrodynamics Consultant Computer Science Applied
Numerical Continuation and Normal Form Analysis of Limit Cycle Bifurcations without Computing Poincaré Maps
 Numerical Continuation and Normal Form Analysis of Limit Cycle Bifurcations without Computing Poincaré Maps Yuri A. Kuznetsov joint work with W. Govaerts, A. Dhooge(Gent), and E. Doedel (Montreal) LCBIF
Numerical Continuation and Normal Form Analysis of Limit Cycle Bifurcations without Computing Poincaré Maps Yuri A. Kuznetsov joint work with W. Govaerts, A. Dhooge(Gent), and E. Doedel (Montreal) LCBIF
BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs
 BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits. 2. Equilibria. 3. Periodic orbits and limit cycles. 4. Homoclinic orbits.
BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits. 2. Equilibria. 3. Periodic orbits and limit cycles. 4. Homoclinic orbits.
Stability of Feedback Solutions for Infinite Horizon Noncooperative Differential Games
 Stability of Feedback Solutions for Infinite Horizon Noncooperative Differential Games Alberto Bressan ) and Khai T. Nguyen ) *) Department of Mathematics, Penn State University **) Department of Mathematics,
Stability of Feedback Solutions for Infinite Horizon Noncooperative Differential Games Alberto Bressan ) and Khai T. Nguyen ) *) Department of Mathematics, Penn State University **) Department of Mathematics,
5.2.2 Planar Andronov-Hopf bifurcation
 138 CHAPTER 5. LOCAL BIFURCATION THEORY 5.. Planar Andronov-Hopf bifurcation What happens if a planar system has an equilibrium x = x 0 at some parameter value α = α 0 with eigenvalues λ 1, = ±iω 0, ω
138 CHAPTER 5. LOCAL BIFURCATION THEORY 5.. Planar Andronov-Hopf bifurcation What happens if a planar system has an equilibrium x = x 0 at some parameter value α = α 0 with eigenvalues λ 1, = ±iω 0, ω
1 2 predators competing for 1 prey
 1 2 predators competing for 1 prey I consider here the equations for two predator species competing for 1 prey species The equations of the system are H (t) = rh(1 H K ) a1hp1 1+a a 2HP 2 1T 1H 1 + a 2
1 2 predators competing for 1 prey I consider here the equations for two predator species competing for 1 prey species The equations of the system are H (t) = rh(1 H K ) a1hp1 1+a a 2HP 2 1T 1H 1 + a 2
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II.
 Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
Numerical techniques: Deterministic Dynamical Systems
 Numerical techniques: Deterministic Dynamical Systems Henk Dijkstra Institute for Marine and Atmospheric research Utrecht, Department of Physics and Astronomy, Utrecht, The Netherlands Transition behavior
Numerical techniques: Deterministic Dynamical Systems Henk Dijkstra Institute for Marine and Atmospheric research Utrecht, Department of Physics and Astronomy, Utrecht, The Netherlands Transition behavior
Continuation of cycle-to-cycle connections in 3D ODEs
 HET p. 1/2 Continuation of cycle-to-cycle connections in 3D ODEs Yuri A. Kuznetsov joint work with E.J. Doedel, B.W. Kooi, and G.A.K. van Voorn HET p. 2/2 Contents Previous works Truncated BVP s with projection
HET p. 1/2 Continuation of cycle-to-cycle connections in 3D ODEs Yuri A. Kuznetsov joint work with E.J. Doedel, B.W. Kooi, and G.A.K. van Voorn HET p. 2/2 Contents Previous works Truncated BVP s with projection
AIMS Exercise Set # 1
 AIMS Exercise Set #. Determine the form of the single precision floating point arithmetic used in the computers at AIMS. What is the largest number that can be accurately represented? What is the smallest
AIMS Exercise Set #. Determine the form of the single precision floating point arithmetic used in the computers at AIMS. What is the largest number that can be accurately represented? What is the smallest
Numerical Algorithms as Dynamical Systems
 A Study on Numerical Algorithms as Dynamical Systems Moody Chu North Carolina State University What This Study Is About? To recast many numerical algorithms as special dynamical systems, whence to derive
A Study on Numerical Algorithms as Dynamical Systems Moody Chu North Carolina State University What This Study Is About? To recast many numerical algorithms as special dynamical systems, whence to derive
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
Evolution of the L 1 halo family in the radial solar sail CRTBP
 Celestial Mechanics and Dynamical Astronomy manuscript No. (will be inserted by the editor) Evolution of the L 1 halo family in the radial solar sail CRTBP Patricia Verrier Thomas Waters Jan Sieber Received:
Celestial Mechanics and Dynamical Astronomy manuscript No. (will be inserted by the editor) Evolution of the L 1 halo family in the radial solar sail CRTBP Patricia Verrier Thomas Waters Jan Sieber Received:
Chapter 2 Hopf Bifurcation and Normal Form Computation
 Chapter 2 Hopf Bifurcation and Normal Form Computation In this chapter, we discuss the computation of normal forms. First we present a general approach which combines center manifold theory with computation
Chapter 2 Hopf Bifurcation and Normal Form Computation In this chapter, we discuss the computation of normal forms. First we present a general approach which combines center manifold theory with computation
Spike-adding canard explosion of bursting oscillations
 Spike-adding canard explosion of bursting oscillations Paul Carter Mathematical Institute Leiden University Abstract This paper examines a spike-adding bifurcation phenomenon whereby small amplitude canard
Spike-adding canard explosion of bursting oscillations Paul Carter Mathematical Institute Leiden University Abstract This paper examines a spike-adding bifurcation phenomenon whereby small amplitude canard
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10)
 Fake Past Exam (TT 10)") Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Alberto Bressan. Department of Mathematics, Penn State University
 Non-cooperative Differential Games A Homotopy Approach Alberto Bressan Department of Mathematics, Penn State University 1 Differential Games d dt x(t) = G(x(t), u 1(t), u 2 (t)), x(0) = y, u i (t) U i
Non-cooperative Differential Games A Homotopy Approach Alberto Bressan Department of Mathematics, Penn State University 1 Differential Games d dt x(t) = G(x(t), u 1(t), u 2 (t)), x(0) = y, u i (t) U i
(8.51) ẋ = A(λ)x + F(x, λ), where λ lr, the matrix A(λ) and function F(x, λ) are C k -functions with k 1,
 ẋ = A(λ)x + F(x, λ), where λ lr, the matrix A(λ) and function F(x, λ) are C k -functions with k 1,") 2.8.7. Poincaré-Andronov-Hopf Bifurcation. In the previous section, we have given a rather detailed method for determining the periodic orbits of a two dimensional system which is the perturbation of a
2.8.7. Poincaré-Andronov-Hopf Bifurcation. In the previous section, we have given a rather detailed method for determining the periodic orbits of a two dimensional system which is the perturbation of a
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: August 22, 2018, at 08 30 12 30 Johanneberg Jan Meibohm,
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: August 22, 2018, at 08 30 12 30 Johanneberg Jan Meibohm,
1. < 0: the eigenvalues are real and have opposite signs; the fixed point is a saddle point
 Solving a Linear System τ = trace(a) = a + d = λ 1 + λ 2 λ 1,2 = τ± = det(a) = ad bc = λ 1 λ 2 Classification of Fixed Points τ 2 4 1. < 0: the eigenvalues are real and have opposite signs; the fixed point
Solving a Linear System τ = trace(a) = a + d = λ 1 + λ 2 λ 1,2 = τ± = det(a) = ad bc = λ 1 λ 2 Classification of Fixed Points τ 2 4 1. < 0: the eigenvalues are real and have opposite signs; the fixed point
One Dimensional Dynamical Systems
 16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
3 Applications of partial differentiation
 Advanced Calculus Chapter 3 Applications of partial differentiation 37 3 Applications of partial differentiation 3.1 Stationary points Higher derivatives Let U R 2 and f : U R. The partial derivatives
Advanced Calculus Chapter 3 Applications of partial differentiation 37 3 Applications of partial differentiation 3.1 Stationary points Higher derivatives Let U R 2 and f : U R. The partial derivatives
BIFURCATION PHENOMENA Lecture 4: Bifurcations in n-dimensional ODEs
 BIFURCATION PHENOMENA Lecture 4: Bifurcations in n-dimensional ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits: equilibria cycles connecting orbits compact invariant manifolds strange
BIFURCATION PHENOMENA Lecture 4: Bifurcations in n-dimensional ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits: equilibria cycles connecting orbits compact invariant manifolds strange
STABILITY. Phase portraits and local stability
 MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
Continuous Threshold Policy Harvesting in Predator-Prey Models
 Continuous Threshold Policy Harvesting in Predator-Prey Models Jon Bohn and Kaitlin Speer Department of Mathematics, University of Wisconsin - Madison Department of Mathematics, Baylor University July
Continuous Threshold Policy Harvesting in Predator-Prey Models Jon Bohn and Kaitlin Speer Department of Mathematics, University of Wisconsin - Madison Department of Mathematics, Baylor University July
On dynamical properties of multidimensional diffeomorphisms from Newhouse regions: I
 IOP PUBLISHING Nonlinearity 2 (28) 923 972 NONLINEARITY doi:.88/95-775/2/5/3 On dynamical properties of multidimensional diffeomorphisms from Newhouse regions: I S V Gonchenko, L P Shilnikov and D V Turaev
IOP PUBLISHING Nonlinearity 2 (28) 923 972 NONLINEARITY doi:.88/95-775/2/5/3 On dynamical properties of multidimensional diffeomorphisms from Newhouse regions: I S V Gonchenko, L P Shilnikov and D V Turaev
Allen Cahn Equation in Two Spatial Dimension
 Allen Cahn Equation in Two Spatial Dimension Yoichiro Mori April 25, 216 Consider the Allen Cahn equation in two spatial dimension: ɛ u = ɛ2 u + fu) 1) where ɛ > is a small parameter and fu) is of cubic
Allen Cahn Equation in Two Spatial Dimension Yoichiro Mori April 25, 216 Consider the Allen Cahn equation in two spatial dimension: ɛ u = ɛ2 u + fu) 1) where ɛ > is a small parameter and fu) is of cubic
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: January 08, 2018, at 08 30 12 30 Johanneberg Kristian
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: January 08, 2018, at 08 30 12 30 Johanneberg Kristian
Differential equations, comprehensive exam topics and sample questions
 Differential equations, comprehensive exam topics and sample questions Topics covered ODE s: Chapters -5, 7, from Elementary Differential Equations by Edwards and Penney, 6th edition.. Exact solutions
Differential equations, comprehensive exam topics and sample questions Topics covered ODE s: Chapters -5, 7, from Elementary Differential Equations by Edwards and Penney, 6th edition.. Exact solutions
7 Planar systems of linear ODE
 7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
Math Ordinary Differential Equations
 Math 411 - Ordinary Differential Equations Review Notes - 1 1 - Basic Theory A first order ordinary differential equation has the form x = f(t, x) (11) Here x = dx/dt Given an initial data x(t 0 ) = x
Math 411 - Ordinary Differential Equations Review Notes - 1 1 - Basic Theory A first order ordinary differential equation has the form x = f(t, x) (11) Here x = dx/dt Given an initial data x(t 0 ) = x
WIDELY SEPARATED FREQUENCIES IN COUPLED OSCILLATORS WITH ENERGY-PRESERVING QUADRATIC NONLINEARITY
 WIDELY SEPARATED FREQUENCIES IN COUPLED OSCILLATORS WITH ENERGY-PRESERVING QUADRATIC NONLINEARITY J.M. TUWANKOTTA Abstract. In this paper we present an analysis of a system of coupled oscillators suggested
WIDELY SEPARATED FREQUENCIES IN COUPLED OSCILLATORS WITH ENERGY-PRESERVING QUADRATIC NONLINEARITY J.M. TUWANKOTTA Abstract. In this paper we present an analysis of a system of coupled oscillators suggested
Clearly the passage of an eigenvalue through to the positive real half plane leads to a qualitative change in the phase portrait, i.e.
 Bifurcations We have already seen how the loss of stiffness in a linear oscillator leads to instability. In a practical situation the stiffness may not degrade in a linear fashion, and instability may
Bifurcations We have already seen how the loss of stiffness in a linear oscillator leads to instability. In a practical situation the stiffness may not degrade in a linear fashion, and instability may
TWELVE LIMIT CYCLES IN A CUBIC ORDER PLANAR SYSTEM WITH Z 2 -SYMMETRY. P. Yu 1,2 and M. Han 1
 COMMUNICATIONS ON Website: http://aimsciences.org PURE AND APPLIED ANALYSIS Volume 3, Number 3, September 2004 pp. 515 526 TWELVE LIMIT CYCLES IN A CUBIC ORDER PLANAR SYSTEM WITH Z 2 -SYMMETRY P. Yu 1,2
COMMUNICATIONS ON Website: http://aimsciences.org PURE AND APPLIED ANALYSIS Volume 3, Number 3, September 2004 pp. 515 526 TWELVE LIMIT CYCLES IN A CUBIC ORDER PLANAR SYSTEM WITH Z 2 -SYMMETRY P. Yu 1,2
Computing Periodic Orbits and their Bifurcations with Automatic Differentiation
 Computing Periodic Orbits and their Bifurcations with Automatic Differentiation John Guckenheimer and Brian Meloon Mathematics Department, Ithaca, NY 14853 September 29, 1999 1 Introduction This paper
Computing Periodic Orbits and their Bifurcations with Automatic Differentiation John Guckenheimer and Brian Meloon Mathematics Department, Ithaca, NY 14853 September 29, 1999 1 Introduction This paper
Math 302 Outcome Statements Winter 2013
 Math 302 Outcome Statements Winter 2013 1 Rectangular Space Coordinates; Vectors in the Three-Dimensional Space (a) Cartesian coordinates of a point (b) sphere (c) symmetry about a point, a line, and a
Math 302 Outcome Statements Winter 2013 1 Rectangular Space Coordinates; Vectors in the Three-Dimensional Space (a) Cartesian coordinates of a point (b) sphere (c) symmetry about a point, a line, and a
Course Summary Math 211
 Course Summary Math 211 table of contents I. Functions of several variables. II. R n. III. Derivatives. IV. Taylor s Theorem. V. Differential Geometry. VI. Applications. 1. Best affine approximations.
Course Summary Math 211 table of contents I. Functions of several variables. II. R n. III. Derivatives. IV. Taylor s Theorem. V. Differential Geometry. VI. Applications. 1. Best affine approximations.
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: January 14, 2019, at 08 30 12 30 Johanneberg Kristian
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: January 14, 2019, at 08 30 12 30 Johanneberg Kristian
1 Introduction Definitons Markov... 2
 Compact course notes Dynamic systems Fall 2011 Professor: Y. Kudryashov transcribed by: J. Lazovskis Independent University of Moscow December 23, 2011 Contents 1 Introduction 2 1.1 Definitons...............................................
Compact course notes Dynamic systems Fall 2011 Professor: Y. Kudryashov transcribed by: J. Lazovskis Independent University of Moscow December 23, 2011 Contents 1 Introduction 2 1.1 Definitons...............................................
The Hopf-van der Pol System: Failure of a Homotopy Method
 DOI.7/s259--9-5 ORIGINAL RESEARCH The Hopf-van der Pol System: Failure of a Homotopy Method H. G. E. Meijer T. Kalmár-Nagy Foundation for Scientific Research and Technological Innovation 2 Abstract The
DOI.7/s259--9-5 ORIGINAL RESEARCH The Hopf-van der Pol System: Failure of a Homotopy Method H. G. E. Meijer T. Kalmár-Nagy Foundation for Scientific Research and Technological Innovation 2 Abstract The
7 Two-dimensional bifurcations
 7 Two-dimensional bifurcations As in one-dimensional systems: fixed points may be created, destroyed, or change stability as parameters are varied (change of topological equivalence ). In addition closed
7 Two-dimensional bifurcations As in one-dimensional systems: fixed points may be created, destroyed, or change stability as parameters are varied (change of topological equivalence ). In addition closed
tutorial ii: One-parameter bifurcation analysis of equilibria with matcont
 tutorial ii: One-parameter bifurcation analysis of equilibria with matcont Yu.A. Kuznetsov Department of Mathematics Utrecht University Budapestlaan 6 3508 TA, Utrecht February 13, 2018 1 This session
tutorial ii: One-parameter bifurcation analysis of equilibria with matcont Yu.A. Kuznetsov Department of Mathematics Utrecht University Budapestlaan 6 3508 TA, Utrecht February 13, 2018 1 This session
MCE693/793: Analysis and Control of Nonlinear Systems
 MCE693/793: Analysis and Control of Nonlinear Systems Systems of Differential Equations Phase Plane Analysis Hanz Richter Mechanical Engineering Department Cleveland State University Systems of Nonlinear
MCE693/793: Analysis and Control of Nonlinear Systems Systems of Differential Equations Phase Plane Analysis Hanz Richter Mechanical Engineering Department Cleveland State University Systems of Nonlinear
In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation.
 1 2 Linear Systems In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation 21 Matrix ODEs Let and is a scalar A linear function satisfies Linear superposition ) Linear
1 2 Linear Systems In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation 21 Matrix ODEs Let and is a scalar A linear function satisfies Linear superposition ) Linear
u xx + u yy = 0. (5.1)
") Chapter 5 Laplace Equation The following equation is called Laplace equation in two independent variables x, y: The non-homogeneous problem u xx + u yy =. (5.1) u xx + u yy = F, (5.) where F is a function
Chapter 5 Laplace Equation The following equation is called Laplace equation in two independent variables x, y: The non-homogeneous problem u xx + u yy =. (5.1) u xx + u yy = F, (5.) where F is a function
DYNAMICAL SYSTEMS WITH A CODIMENSION-ONE INVARIANT MANIFOLD: THE UNFOLDINGS AND ITS BIFURCATIONS
 International Journal of Bifurcation and Chaos c World Scientific Publishing Company DYNAMICAL SYSTEMS WITH A CODIMENSION-ONE INVARIANT MANIFOLD: THE UNFOLDINGS AND ITS BIFURCATIONS KIE VAN IVANKY SAPUTRA
International Journal of Bifurcation and Chaos c World Scientific Publishing Company DYNAMICAL SYSTEMS WITH A CODIMENSION-ONE INVARIANT MANIFOLD: THE UNFOLDINGS AND ITS BIFURCATIONS KIE VAN IVANKY SAPUTRA
Problem set 7 Math 207A, Fall 2011 Solutions
 Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Computation of homoclinic and heteroclinic orbits for flows
 Computation of homoclinic and heteroclinic orbits for flows Jean-Philippe Lessard BCAM BCAM Mini-symposium on Computational Math February 1st, 2011 Rigorous Computations Connecting Orbits Compute a set
Computation of homoclinic and heteroclinic orbits for flows Jean-Philippe Lessard BCAM BCAM Mini-symposium on Computational Math February 1st, 2011 Rigorous Computations Connecting Orbits Compute a set
Lectures on Dynamical Systems. Anatoly Neishtadt
 Lectures on Dynamical Systems Anatoly Neishtadt Lectures for Mathematics Access Grid Instruction and Collaboration (MAGIC) consortium, Loughborough University, 2007 Part 3 LECTURE 14 NORMAL FORMS Resonances
Lectures on Dynamical Systems Anatoly Neishtadt Lectures for Mathematics Access Grid Instruction and Collaboration (MAGIC) consortium, Loughborough University, 2007 Part 3 LECTURE 14 NORMAL FORMS Resonances
A review of stability and dynamical behaviors of differential equations:
 A review of stability and dynamical behaviors of differential equations: scalar ODE: u t = f(u), system of ODEs: u t = f(u, v), v t = g(u, v), reaction-diffusion equation: u t = D u + f(u), x Ω, with boundary
A review of stability and dynamical behaviors of differential equations: scalar ODE: u t = f(u), system of ODEs: u t = f(u, v), v t = g(u, v), reaction-diffusion equation: u t = D u + f(u), x Ω, with boundary
x R d, λ R, f smooth enough. Goal: compute ( follow ) equilibrium solutions as λ varies, i.e. compute solutions (x, λ) to 0 = f(x, λ).
 equilibrium solutions as λ varies, i.e. compute solutions (x, λ) to 0 = f(x, λ).") Continuation of equilibria Problem Parameter-dependent ODE ẋ = f(x, λ), x R d, λ R, f smooth enough. Goal: compute ( follow ) equilibrium solutions as λ varies, i.e. compute solutions (x, λ) to 0 = f(x,
Continuation of equilibria Problem Parameter-dependent ODE ẋ = f(x, λ), x R d, λ R, f smooth enough. Goal: compute ( follow ) equilibrium solutions as λ varies, i.e. compute solutions (x, λ) to 0 = f(x,
Sufficient conditions for a period incrementing big bang bifurcation in one-dimensional maps.
 Sufficient conditions for a period incrementing big bang bifurcation in one-dimensional maps. V. Avrutin, A. Granados and M. Schanz Abstract Typically, big bang bifurcation occur for one (or higher)-dimensional
Sufficient conditions for a period incrementing big bang bifurcation in one-dimensional maps. V. Avrutin, A. Granados and M. Schanz Abstract Typically, big bang bifurcation occur for one (or higher)-dimensional
FROM EQUILIBRIUM TO CHAOS
 FROM EQUILIBRIUM TO CHAOS Practica! Bifurcation and Stability Analysis RÜDIGER SEYDEL Institut für Angewandte Mathematik und Statistik University of Würzburg Würzburg, Federal Republic of Germany ELSEVIER
FROM EQUILIBRIUM TO CHAOS Practica! Bifurcation and Stability Analysis RÜDIGER SEYDEL Institut für Angewandte Mathematik und Statistik University of Würzburg Würzburg, Federal Republic of Germany ELSEVIER
Towards a Global Theory of Singularly Perturbed Dynamical Systems John Guckenheimer Cornell University
 Towards a Global Theory of Singularly Perturbed Dynamical Systems John Guckenheimer Cornell University Dynamical systems with multiple time scales arise naturally in many domains. Models of neural systems
Towards a Global Theory of Singularly Perturbed Dynamical Systems John Guckenheimer Cornell University Dynamical systems with multiple time scales arise naturally in many domains. Models of neural systems
Shilnikov bifurcations in the Hopf-zero singularity
 Shilnikov bifurcations in the Hopf-zero singularity Geometry and Dynamics in interaction Inma Baldomá, Oriol Castejón, Santiago Ibáñez, Tere M-Seara Observatoire de Paris, 15-17 December 2017, Paris Tere
Shilnikov bifurcations in the Hopf-zero singularity Geometry and Dynamics in interaction Inma Baldomá, Oriol Castejón, Santiago Ibáñez, Tere M-Seara Observatoire de Paris, 15-17 December 2017, Paris Tere
Preliminary/Qualifying Exam in Numerical Analysis (Math 502a) Spring 2012
 Spring 2012") Instructions Preliminary/Qualifying Exam in Numerical Analysis (Math 502a) Spring 2012 The exam consists of four problems, each having multiple parts. You should attempt to solve all four problems. 1.
Instructions Preliminary/Qualifying Exam in Numerical Analysis (Math 502a) Spring 2012 The exam consists of four problems, each having multiple parts. You should attempt to solve all four problems. 1.
On low speed travelling waves of the Kuramoto-Sivashinsky equation.
 On low speed travelling waves of the Kuramoto-Sivashinsky equation. Jeroen S.W. Lamb Joint with Jürgen Knobloch (Ilmenau, Germany) Marco-Antonio Teixeira (Campinas, Brazil) Kevin Webster (Imperial College
On low speed travelling waves of the Kuramoto-Sivashinsky equation. Jeroen S.W. Lamb Joint with Jürgen Knobloch (Ilmenau, Germany) Marco-Antonio Teixeira (Campinas, Brazil) Kevin Webster (Imperial College
Invariant Manifolds of Dynamical Systems and an application to Space Exploration
 Invariant Manifolds of Dynamical Systems and an application to Space Exploration Mateo Wirth January 13, 2014 1 Abstract In this paper we go over the basics of stable and unstable manifolds associated
Invariant Manifolds of Dynamical Systems and an application to Space Exploration Mateo Wirth January 13, 2014 1 Abstract In this paper we go over the basics of stable and unstable manifolds associated
FFTs in Graphics and Vision. The Laplace Operator
 FFTs in Graphics and Vision The Laplace Operator 1 Outline Math Stuff Symmetric/Hermitian Matrices Lagrange Multipliers Diagonalizing Symmetric Matrices The Laplacian Operator 2 Linear Operators Definition:
FFTs in Graphics and Vision The Laplace Operator 1 Outline Math Stuff Symmetric/Hermitian Matrices Lagrange Multipliers Diagonalizing Symmetric Matrices The Laplacian Operator 2 Linear Operators Definition:
Entrance Exam, Differential Equations April, (Solve exactly 6 out of the 8 problems) y + 2y + y cos(x 2 y) = 0, y(0) = 2, y (0) = 4.
 y + 2y + y cos(x 2 y) = 0, y(0) = 2, y (0) = 4.") Entrance Exam, Differential Equations April, 7 (Solve exactly 6 out of the 8 problems). Consider the following initial value problem: { y + y + y cos(x y) =, y() = y. Find all the values y such that the
Entrance Exam, Differential Equations April, 7 (Solve exactly 6 out of the 8 problems). Consider the following initial value problem: { y + y + y cos(x y) =, y() = y. Find all the values y such that the
Applied Dynamical Systems
 Applied Dynamical Systems Recommended Reading: (1) Morris W. Hirsch, Stephen Smale, and Robert L. Devaney. Differential equations, dynamical systems, and an introduction to chaos. Elsevier/Academic Press,
Applied Dynamical Systems Recommended Reading: (1) Morris W. Hirsch, Stephen Smale, and Robert L. Devaney. Differential equations, dynamical systems, and an introduction to chaos. Elsevier/Academic Press,
1. (i) Determine how many periodic orbits and equilibria can be born at the bifurcations of the zero equilibrium of the following system:
 Determine how many periodic orbits and equilibria can be born at the bifurcations of the zero equilibrium of the following system:") 1. (i) Determine how many periodic orbits and equilibria can be born at the bifurcations of the zero equilibrium of the following system: ẋ = y x 2, ẏ = z + xy, ż = y z + x 2 xy + y 2 + z 2 x 4. (ii) Determine
1. (i) Determine how many periodic orbits and equilibria can be born at the bifurcations of the zero equilibrium of the following system: ẋ = y x 2, ẏ = z + xy, ż = y z + x 2 xy + y 2 + z 2 x 4. (ii) Determine
Bifurcations thresholds of halo orbits
 10 th AstroNet-II Final Meeting, 15 th -19 th June 2015, Tossa Del Mar 1/23 spazio Bifurcations thresholds of halo orbits Dr. Ceccaroni Marta ceccaron@mat.uniroma2.it University of Roma Tor Vergata Work
10 th AstroNet-II Final Meeting, 15 th -19 th June 2015, Tossa Del Mar 1/23 spazio Bifurcations thresholds of halo orbits Dr. Ceccaroni Marta ceccaron@mat.uniroma2.it University of Roma Tor Vergata Work
Hyperbolicity singularities in rarefaction waves
 Hyperbolicity singularities in rarefaction waves Alexei A. Mailybaev and Dan Marchesin Abstract For mixed-type systems of conservation laws, rarefaction waves may contain states at the boundary of the
Hyperbolicity singularities in rarefaction waves Alexei A. Mailybaev and Dan Marchesin Abstract For mixed-type systems of conservation laws, rarefaction waves may contain states at the boundary of the
ẋ = f(x, y), ẏ = g(x, y), (x, y) D, can only have periodic solutions if (f,g) changes sign in D or if (f,g)=0in D.
, ẏ = g(x, y), (x, y) D, can only have periodic solutions if (f,g) changes sign in D or if (f,g)=0in D.") 4 Periodic Solutions We have shown that in the case of an autonomous equation the periodic solutions correspond with closed orbits in phase-space. Autonomous two-dimensional systems with phase-space R
4 Periodic Solutions We have shown that in the case of an autonomous equation the periodic solutions correspond with closed orbits in phase-space. Autonomous two-dimensional systems with phase-space R
27. Topological classification of complex linear foliations
 27. Topological classification of complex linear foliations 545 H. Find the expression of the corresponding element [Γ ε ] H 1 (L ε, Z) through [Γ 1 ε], [Γ 2 ε], [δ ε ]. Problem 26.24. Prove that for any
27. Topological classification of complex linear foliations 545 H. Find the expression of the corresponding element [Γ ε ] H 1 (L ε, Z) through [Γ 1 ε], [Γ 2 ε], [δ ε ]. Problem 26.24. Prove that for any
Introduction to numerical simulations for Stochastic ODEs
 Introduction to numerical simulations for Stochastic ODEs Xingye Kan Illinois Institute of Technology Department of Applied Mathematics Chicago, IL 60616 August 9, 2010 Outline 1 Preliminaries 2 Numerical
Introduction to numerical simulations for Stochastic ODEs Xingye Kan Illinois Institute of Technology Department of Applied Mathematics Chicago, IL 60616 August 9, 2010 Outline 1 Preliminaries 2 Numerical
Connecting orbits and invariant manifolds in the spatial three-body problem
 C C Dynamical A L T E C S H Connecting orbits and invariant manifolds in the spatial three-body problem Shane D. Ross Control and Dynamical Systems, Caltech Work with G. Gómez, W. Koon, M. Lo, J. Marsden,
C C Dynamical A L T E C S H Connecting orbits and invariant manifolds in the spatial three-body problem Shane D. Ross Control and Dynamical Systems, Caltech Work with G. Gómez, W. Koon, M. Lo, J. Marsden,
Math 1553, Introduction to Linear Algebra
 Learning goals articulate what students are expected to be able to do in a course that can be measured. This course has course-level learning goals that pertain to the entire course, and section-level
Learning goals articulate what students are expected to be able to do in a course that can be measured. This course has course-level learning goals that pertain to the entire course, and section-level
n 1 f n 1 c 1 n+1 = c 1 n $ c 1 n 1. After taking logs, this becomes
 Root finding: 1 a The points {x n+1, }, {x n, f n }, {x n 1, f n 1 } should be co-linear Say they lie on the line x + y = This gives the relations x n+1 + = x n +f n = x n 1 +f n 1 = Eliminating α and
Root finding: 1 a The points {x n+1, }, {x n, f n }, {x n 1, f n 1 } should be co-linear Say they lie on the line x + y = This gives the relations x n+1 + = x n +f n = x n 1 +f n 1 = Eliminating α and
One dimensional Maps
 Chapter 4 One dimensional Maps The ordinary differential equation studied in chapters 1-3 provide a close link to actual physical systems it is easy to believe these equations provide at least an approximate
Chapter 4 One dimensional Maps The ordinary differential equation studied in chapters 1-3 provide a close link to actual physical systems it is easy to believe these equations provide at least an approximate
Understand the existence and uniqueness theorems and what they tell you about solutions to initial value problems.
 Review Outline To review for the final, look over the following outline and look at problems from the book and on the old exam s and exam reviews to find problems about each of the following topics.. Basics
Review Outline To review for the final, look over the following outline and look at problems from the book and on the old exam s and exam reviews to find problems about each of the following topics.. Basics
Linear Algebra March 16, 2019
 Linear Algebra March 16, 2019 2 Contents 0.1 Notation................................ 4 1 Systems of linear equations, and matrices 5 1.1 Systems of linear equations..................... 5 1.2 Augmented
Linear Algebra March 16, 2019 2 Contents 0.1 Notation................................ 4 1 Systems of linear equations, and matrices 5 1.1 Systems of linear equations..................... 5 1.2 Augmented
1 Assignment 1: Nonlinear dynamics (due September
 Assignment : Nonlinear dynamics (due September 4, 28). Consider the ordinary differential equation du/dt = cos(u). Sketch the equilibria and indicate by arrows the increase or decrease of the solutions.
Assignment : Nonlinear dynamics (due September 4, 28). Consider the ordinary differential equation du/dt = cos(u). Sketch the equilibria and indicate by arrows the increase or decrease of the solutions.
Chapter 6 Nonlinear Systems and Phenomena. Friday, November 2, 12
 Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
Chapter 23. Predicting Chaos The Shift Map and Symbolic Dynamics
 Chapter 23 Predicting Chaos We have discussed methods for diagnosing chaos, but what about predicting the existence of chaos in a dynamical system. This is a much harder problem, and it seems that the
Chapter 23 Predicting Chaos We have discussed methods for diagnosing chaos, but what about predicting the existence of chaos in a dynamical system. This is a much harder problem, and it seems that the
Math 4A Notes. Written by Victoria Kala Last updated June 11, 2017
 Math 4A Notes Written by Victoria Kala vtkala@math.ucsb.edu Last updated June 11, 2017 Systems of Linear Equations A linear equation is an equation that can be written in the form a 1 x 1 + a 2 x 2 +...
Math 4A Notes Written by Victoria Kala vtkala@math.ucsb.edu Last updated June 11, 2017 Systems of Linear Equations A linear equation is an equation that can be written in the form a 1 x 1 + a 2 x 2 +...
Math 273 (51) - Final
 - Final") Name: Id #: Math 273 (5) - Final Autumn Quarter 26 Thursday, December 8, 26-6: to 8: Instructions: Prob. Points Score possible 25 2 25 3 25 TOTAL 75 Read each problem carefully. Write legibly. Show all
Name: Id #: Math 273 (5) - Final Autumn Quarter 26 Thursday, December 8, 26-6: to 8: Instructions: Prob. Points Score possible 25 2 25 3 25 TOTAL 75 Read each problem carefully. Write legibly. Show all
arxiv: v1 [math.ap] 20 Dec 2018
![arxiv: v1 [math.ap] 20 Dec 2018](/thumbs/92/109324287.jpg "arxiv: v1 [math.ap] 20 Dec 2018") arxiv:181.8418v1 [math.ap] Dec 18 Radial solutions of scaling invariant nonlinear elliptic equations with mixed reaction terms arie-françoise Bidaut-Véron, arta Garcia-Huidobro Laurent Véron Abstract We
arxiv:181.8418v1 [math.ap] Dec 18 Radial solutions of scaling invariant nonlinear elliptic equations with mixed reaction terms arie-françoise Bidaut-Véron, arta Garcia-Huidobro Laurent Véron Abstract We
Solutions Chapter 9. u. (c) u(t) = 1 e t + c 2 e 3 t! c 1 e t 3c 2 e 3 t. (v) (a) u(t) = c 1 e t cos 3t + c 2 e t sin 3t. (b) du
 u(t) = 1 e t + c 2 e 3 t! c 1 e t 3c 2 e 3 t. (v) (a) u(t) = c 1 e t cos 3t + c 2 e t sin 3t. (b) du") Solutions hapter 9 dode 9 asic Solution Techniques 9 hoose one or more of the following differential equations, and then: (a) Solve the equation directly (b) Write down its phase plane equivalent, and
Solutions hapter 9 dode 9 asic Solution Techniques 9 hoose one or more of the following differential equations, and then: (a) Solve the equation directly (b) Write down its phase plane equivalent, and
Defining Equations for Bifurcations and Singularities
 Defining Equations for Bifurcations and Singularities John Guckenheimer and Yongjian Xiang Mathematics Department, Ithaca, NY 14853 For Vladimir Arnold on the occasion of his 65th birthday July 1, 2002
Defining Equations for Bifurcations and Singularities John Guckenheimer and Yongjian Xiang Mathematics Department, Ithaca, NY 14853 For Vladimir Arnold on the occasion of his 65th birthday July 1, 2002
Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients. Takayuki Yamaguchi
 Hokkaido Mathematical Journal Vol. 44 (2015) p. 277 312 Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients Takayuki Yamaguchi (Received March 13,
Hokkaido Mathematical Journal Vol. 44 (2015) p. 277 312 Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients Takayuki Yamaguchi (Received March 13,
On the Stability of the Best Reply Map for Noncooperative Differential Games
 On the Stability of the Best Reply Map for Noncooperative Differential Games Alberto Bressan and Zipeng Wang Department of Mathematics, Penn State University, University Park, PA, 68, USA DPMMS, University
On the Stability of the Best Reply Map for Noncooperative Differential Games Alberto Bressan and Zipeng Wang Department of Mathematics, Penn State University, University Park, PA, 68, USA DPMMS, University
Chapter 6 - Ordinary Differential Equations
 Chapter 6 - Ordinary Differential Equations 7.1 Solving Initial-Value Problems In this chapter, we will be interested in the solution of ordinary differential equations. Ordinary differential equations
Chapter 6 - Ordinary Differential Equations 7.1 Solving Initial-Value Problems In this chapter, we will be interested in the solution of ordinary differential equations. Ordinary differential equations
Models Involving Interactions between Predator and Prey Populations
 Models Involving Interactions between Predator and Prey Populations Matthew Mitchell Georgia College and State University December 30, 2015 Abstract Predator-prey models are used to show the intricate
Models Involving Interactions between Predator and Prey Populations Matthew Mitchell Georgia College and State University December 30, 2015 Abstract Predator-prey models are used to show the intricate
Analysis of Bifurcations in a Power System Model with Excitation Limits
 Analysis of Bifurcations in a Power System Model with Excitation Limits Rajesh G. Kavasseri and K. R. Padiyar Department of Electrical Engineering Indian Institute of Science, Bangalore, India Abstract
Analysis of Bifurcations in a Power System Model with Excitation Limits Rajesh G. Kavasseri and K. R. Padiyar Department of Electrical Engineering Indian Institute of Science, Bangalore, India Abstract
Torus Maps from Weak Coupling of Strong Resonances
 Torus Maps from Weak Coupling of Strong Resonances John Guckenheimer Alexander I. Khibnik October 5, 1999 Abstract This paper investigates a family of diffeomorphisms of the two dimensional torus derived
Torus Maps from Weak Coupling of Strong Resonances John Guckenheimer Alexander I. Khibnik October 5, 1999 Abstract This paper investigates a family of diffeomorphisms of the two dimensional torus derived
Numerical Methods - Numerical Linear Algebra
 Numerical Methods - Numerical Linear Algebra Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Numerical Linear Algebra I 2013 1 / 62 Outline 1 Motivation 2 Solving Linear
Numerical Methods - Numerical Linear Algebra Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Numerical Linear Algebra I 2013 1 / 62 Outline 1 Motivation 2 Solving Linear
Some solutions of the written exam of January 27th, 2014
 TEORIA DEI SISTEMI Systems Theory) Prof. C. Manes, Prof. A. Germani Some solutions of the written exam of January 7th, 0 Problem. Consider a feedback control system with unit feedback gain, with the following
TEORIA DEI SISTEMI Systems Theory) Prof. C. Manes, Prof. A. Germani Some solutions of the written exam of January 7th, 0 Problem. Consider a feedback control system with unit feedback gain, with the following