7 Two-dimensional bifurcations
|
|
|
- Hugo Wiggins
- 5 years ago
- Views:
Transcription


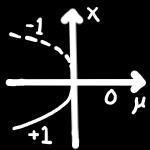
1 7 Two-dimensional bifurcations As in one-dimensional systems: fixed points may be created, destroyed, or change stability as parameters are varied (change of topological equivalence ). In addition closed orbits may undergo these changes. 7.1 Saddle-node, transcritical, and pitchfork bifurcations Assume that a saddle point and an attracting node collide as a parameter µ is varied. The mechanism of why the collision occurs at all (instead of the fixed points moving past each other): Fixed points are formed at intersections of nullclines. As µ is varied, the nullclines deform continuously. If they slip through each other the fixed points collide: Change coordinates to the local eigenframe of the saddle point. Let the unstable direction of the saddle be ˆv u = (1, 0) and the stable direction ˆv s = (0, 1). When the node comes closeby, it must merge along the unstable manifold of the saddle [otherwise trajectories could not remain continuous and linear as the fixed points merge]. 1
: ẋ = µ x 2 (same as 1D) ẏ = y Along the interconnecting manifold, the eigenvalues have opposite signs at bifurcation (at least) one eigenvalue")
 [before bifurcation t pass = (along interconnecting manifold), this time is reduced smoothly after bifurcation: T pass 1/ µ] (Strogatz")
2 The bifurcation is essentially one-dimensional (in any dimension). Normal form (in unstable/stable directions of saddle): ẋ = µ x 2 (same as 1D) ẏ = y Along the interconnecting manifold, the eigenvalues have opposite signs at bifurcation (at least) one eigenvalue must vanish. After bifurcation a slow region remains (ghost of fixed points) [before bifurcation t pass = (along interconnecting manifold), this time is reduced smoothly after bifurcation: T pass 1/ µ] (Strogatz Sec. 4.3 and Lecture 2). Repelling node? reverse the arrows! The sum of all indices of the fixed points involved in a twodimensional bifurcation in a smooth flow must be conserved (assuming that no value of the bifurcation parameter gives rise to a line of fixed points). After the saddle-node bifurcation no fixed points remain and the index must be zero. only fixed-points with opposite signs may annihilate. Nodes, degenerate nodes, spirals, centers, stars: I = +1, Saddles: I = 1 bifurcations where two fixed points merge and annihilate consist of one saddle and one fixed point with I = +1. Moreover, since one of the eigenvalues smoothly crosses zero at the bifurcation ( crosses zero) the second fixed point is typically a node (unless also τ passes zero), hence the name saddle-node bifurcation. 2

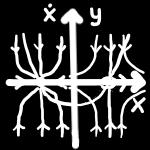
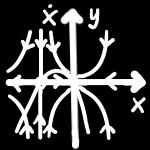
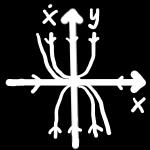
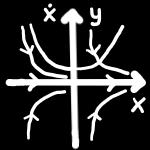
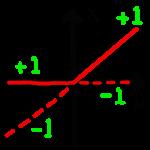
3 Similarly, the other bifurcations discussed in Lecture 2 (transcritical, subcritical pitchfork, supercritical pitchfork), occur in one-dimensional subspaces in higher-dimensional systems. Transversal directions are simply attracting or repelling. The bifurcations are summarized in the Table on the last page. The dynamics along the x-axis is that of 1D flows (x-component of flow plotted as black) and blue shows flow in 2D. The bifurcation diagrams show that the index is preserved. 7.2 Hopf bifurcation A stable fixed point has Re[λ 1,2 ] < 0. A bifurcation to an unstable fixed point occurs if the maximal eigenvalue crosses zero. Consider the three possible bifurcations from stable to unstable in a linear system: a b c b c a Cases a and b have Im[λ 1,2 ] = 0, while case c has Im[λ 1,2 ] 0. Case a corresponds to saddle-node, transcritical, and pitchfork bifurcations above. Case b is marginal and therefore not so interesting. Case c is a Hopf bifurcation: a new type of bifurcation that does not exist in 1D systems. Consider the transition with Im[λ 1,2 ] 0: 3

4 Hopf bifurcations often lead to the formation of limit cycles. bifurcation can be either supercritical or subcritical. The Supercritical Hopf bifurcation If a small-amplitude limit cycle is formed to catch the unstable trajectories after the bifurcation, the bifurcation is supercritical. Example ṙ = r(µ r 2 ) θ = ω Radial equation is on the form of a supercritical pitchfork. When µ < 0 the radial equation has a stable fixed point at r = 0 (stable spiral in x,y-space). When µ > 0 the origin becomes unstable spiral, but trajectories are caught at r = µ, i.e. limit cycle of radius r = µ. stable small-amplitude oscillations. 4
![To verify that the eigenvalues cross Re[λ i ] = 0 with nonzero Im[λ i ] we need to convert to cartesian coordinates x = r cos θ, y = r sin θ.](/docs-images/94/119445630/images/5-0.jpg "Some algebra gives ẋ = µx ωy + cubic terms ẏ = ωx + µy + cubic terms. Stability matrix at fixed point in origin ( ) µ ω J = ω µ Eigenvalues λ = µ ± iω, become unstable as µ becomes positive. 7.2.")
. Example ṙ = µr + r 3 r 5 θ = ω (1) Non-negative zeroes at r 0 = 0 for all µ, [r ±] 2 = (1 ± 1 + 4µ)/2 if 1/4 µ 0.")
5 To verify that the eigenvalues cross Re[λ i ] = 0 with nonzero Im[λ i ] we need to convert to cartesian coordinates x = r cos θ, y = r sin θ. Some algebra gives ẋ = µx ωy + cubic terms ẏ = ωx + µy + cubic terms. Stability matrix at fixed point in origin ( ) µ ω J = ω µ Eigenvalues λ = µ ± iω, become unstable as µ becomes positive Subcritical Hopf bifurcation If no stable limit cycle is formed when the fixed point becomes unstable, trajectories must run away to a distant attractor: fixed point, limit cycle, infinity (or strange attractor for d > 2). Example ṙ = µr + r 3 r 5 θ = ω (1) Non-negative zeroes at r 0 = 0 for all µ, [r ±] 2 = (1 ± 1 + 4µ)/2 if 1/4 µ 0. When µ passes 0: r 0, r and r merge in a subcritical pitchfork bifurcation. System settles in the distant limit 5

6 cycle at r = r +. This jump is similar to the catastrophes in lecture 3. The system exhibits hysteresis, when µ becomes positive, the system jumps to the distant attractor r = r+. To go back to the original stable spiral, it is not enough to reduce µ below zero, it must be reduced below the saddle-node bifurcation at µ = 1/4. The bifurcation at µ = 1/4 is an example of a global bifurcation, to be discussed in Section Whether one obtains a stable limit cycle after a subcritical Hopf bifurcation depends on the global properties of the flow. Before the bifurcation the system always has an unstable limit cycle. 7.3 Global bifurcations The bifurcations mentioned above are local, they happen locally as fixed points collide or change stability. It is also possible to create/destroy limit cycles in non-local regions of flow Bifurcations of cycles Consider once again Eq. (1) ṙ = µr + r 3 r 5 θ = ω This time, consider the bifurcation as µ passes µ c = 1/4. The one-dimensional system for r undergoes a saddle-node bifurcation at a non-zero value of r limit cycles in the two-dimensional system 6
 at θ = π/2.")
7 bifurcate: Infinite-period bifurcation Example: Saddle-node bifurcation on existing limit cycle. ṙ = r(1 r 2 ) θ = µ sin θ Uncoupled equations. r-equation usual equation for attracting limit cycle at r = 1. When µ > 1 we have a stable limit cycle with a bottleneck (slow velocity) at θ = π/2. When µ = 1 a half-stable fixed point appears at (r, θ) = (1, π/2) it takes an infinite time to pass θ = π/2 along the homoclinic orbit (former limit cycle). At θ = π/2 the flow must be vertical towards r = 1. 7
.")
8 When µ < 1 a saddle-node pair is formed, joined by heteroclinic trajectories. As shown in lecture 2 the dynamics is slow close to the saddle-node bifurcation (the time scale along the limit cycles scales as 1/ µ 1 for both sides of the bifurcation). The scaling of the period with the control parameter µ is important in order to investigate oscillating systems in numerical or real-life experiments. Observing amplitude and period time as µ is varied allows to identify or rule out what kind of system we have. Another infinite-time bifurcation (with another scaling in period time, T ln µ, see Problem set 2) is the Homoclinic bifurcation Bifurcation of heteroclinic trajectory Consider the dynamical system ẋ = µ + x 2 xy ẏ = y 2 x 2 1 This system has two saddle points (det J = 2(x y) 2 < 0) at: (x ±, y±) = ±(µ, 1 µ)/ 1 2µ. When µ = 0, they lie on the y- axis, (x ±, y±) = (0, ±1), and since ẋ = 0 along the y-axis, they must 8

9 be connected by a heteroclinic trajectory. When µ is small but non-zero, the fixed points move to either side of the y-axis, (x ±, y±) ±(µ, 1). Since ẋ = µ along the y-axis, the connection between the stable and unstable manifolds must be broken as seen in the following phase portrait: Purple trajectories shows that for µ < 0 there ar solutions in x from + to, while after the bifurcation the system has solutions in x from to Bifurcation of homoclinic orbit Similar to the heteroclinic trajectory above, one may obtain a bifurcation for the homoclinic orbit of a single saddle point. For example, a symmetric system (as considered in Lecture 6) with a homoclinic orbit at the bifurcation point µ c. A small deviation from µ c may break the symmetry and the homoclinic orbit breaks differently depending on the sign of the deviation. Another example is the collision between a limit cycle and a saddle point to form a homoclinic orbit. ẋ = y ẏ = µy + x x 2 + xy Non-local bifurcation need to use computer! The result for some values of µ: 9

.")
10 For µ < µ rmc a saddle point and a limit cycle are isolated. As µ is increased, the limit cycle expands until it eventually collides with the saddle point at µ = µ c, forming a homoclinic orbit. When µ > µ rmc the homoclinic orbit breaks. An example is a Josephson junction which is equivalent to a forced pendulum with friction (Lecture 9). The homoclinic bifurcation is another example of an infinite-period bifurcation (the homoclinic orbit has an infinite period time). The upper right unstable manifold lies inside of stable manifold when µ < µ c and lies outside when µ > µ c. 10





11 Type saddle-node transcritical supercrit. pitchfork subcrit. pitchfork Normal ẋ = µ + x 2 ẋ = µx x 2 ẋ = µx x 3 ẋ = µx + x 3 form ẏ = y ẏ = y ẏ = y ẏ = y µ < 0 Similar to super crit. µ = 0 µ > 0 Diagram Index 11
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: January 14, 2019, at 08 30 12 30 Johanneberg Kristian
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: January 14, 2019, at 08 30 12 30 Johanneberg Kristian
TWO DIMENSIONAL FLOWS. Lecture 5: Limit Cycles and Bifurcations
 TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: August 22, 2018, at 08 30 12 30 Johanneberg Jan Meibohm,
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: August 22, 2018, at 08 30 12 30 Johanneberg Jan Meibohm,
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: January 08, 2018, at 08 30 12 30 Johanneberg Kristian
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: January 08, 2018, at 08 30 12 30 Johanneberg Kristian
1. < 0: the eigenvalues are real and have opposite signs; the fixed point is a saddle point
 Solving a Linear System τ = trace(a) = a + d = λ 1 + λ 2 λ 1,2 = τ± = det(a) = ad bc = λ 1 λ 2 Classification of Fixed Points τ 2 4 1. < 0: the eigenvalues are real and have opposite signs; the fixed point
Solving a Linear System τ = trace(a) = a + d = λ 1 + λ 2 λ 1,2 = τ± = det(a) = ad bc = λ 1 λ 2 Classification of Fixed Points τ 2 4 1. < 0: the eigenvalues are real and have opposite signs; the fixed point
Nonlinear dynamics & chaos BECS
 Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: April 06, 2018, at 14 00 18 00 Johanneberg Kristian
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: April 06, 2018, at 14 00 18 00 Johanneberg Kristian
8 Example 1: The van der Pol oscillator (Strogatz Chapter 7)
") 8 Example 1: The van der Pol oscillator (Strogatz Chapter 7) So far we have seen some different possibilities of what can happen in two-dimensional systems (local and global attractors and bifurcations)
8 Example 1: The van der Pol oscillator (Strogatz Chapter 7) So far we have seen some different possibilities of what can happen in two-dimensional systems (local and global attractors and bifurcations)
Mathematical Modeling I
 Mathematical Modeling I Dr. Zachariah Sinkala Department of Mathematical Sciences Middle Tennessee State University Murfreesboro Tennessee 37132, USA November 5, 2011 1d systems To understand more complex
Mathematical Modeling I Dr. Zachariah Sinkala Department of Mathematical Sciences Middle Tennessee State University Murfreesboro Tennessee 37132, USA November 5, 2011 1d systems To understand more complex
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II.
 Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
= F ( x; µ) (1) where x is a 2-dimensional vector, µ is a parameter, and F :
 (1) where x is a 2-dimensional vector, µ is a parameter, and F :") 1 Bifurcations Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 A bifurcation is a qualitative change
1 Bifurcations Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 A bifurcation is a qualitative change
Example of a Blue Sky Catastrophe
 PUB:[SXG.TEMP]TRANS2913EL.PS 16-OCT-2001 11:08:53.21 SXG Page: 99 (1) Amer. Math. Soc. Transl. (2) Vol. 200, 2000 Example of a Blue Sky Catastrophe Nikolaĭ Gavrilov and Andrey Shilnikov To the memory of
PUB:[SXG.TEMP]TRANS2913EL.PS 16-OCT-2001 11:08:53.21 SXG Page: 99 (1) Amer. Math. Soc. Transl. (2) Vol. 200, 2000 Example of a Blue Sky Catastrophe Nikolaĭ Gavrilov and Andrey Shilnikov To the memory of
2 Discrete growth models, logistic map (Murray, Chapter 2)
") 2 Discrete growth models, logistic map (Murray, Chapter 2) As argued in Lecture 1 the population of non-overlapping generations can be modelled as a discrete dynamical system. This is an example of an
2 Discrete growth models, logistic map (Murray, Chapter 2) As argued in Lecture 1 the population of non-overlapping generations can be modelled as a discrete dynamical system. This is an example of an
Models Involving Interactions between Predator and Prey Populations
 Models Involving Interactions between Predator and Prey Populations Matthew Mitchell Georgia College and State University December 30, 2015 Abstract Predator-prey models are used to show the intricate
Models Involving Interactions between Predator and Prey Populations Matthew Mitchell Georgia College and State University December 30, 2015 Abstract Predator-prey models are used to show the intricate
Bifurcation of Fixed Points
 Bifurcation of Fixed Points CDS140B Lecturer: Wang Sang Koon Winter, 2005 1 Introduction ẏ = g(y, λ). where y R n, λ R p. Suppose it has a fixed point at (y 0, λ 0 ), i.e., g(y 0, λ 0 ) = 0. Two Questions:
Bifurcation of Fixed Points CDS140B Lecturer: Wang Sang Koon Winter, 2005 1 Introduction ẏ = g(y, λ). where y R n, λ R p. Suppose it has a fixed point at (y 0, λ 0 ), i.e., g(y 0, λ 0 ) = 0. Two Questions:
Boulder School for Condensed Matter and Materials Physics. Laurette Tuckerman PMMH-ESPCI-CNRS
 Boulder School for Condensed Matter and Materials Physics Laurette Tuckerman PMMH-ESPCI-CNRS laurette@pmmh.espci.fr Dynamical Systems: A Basic Primer 1 1 Basic bifurcations 1.1 Fixed points and linear
Boulder School for Condensed Matter and Materials Physics Laurette Tuckerman PMMH-ESPCI-CNRS laurette@pmmh.espci.fr Dynamical Systems: A Basic Primer 1 1 Basic bifurcations 1.1 Fixed points and linear
MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation
 MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation 1 Bifurcations in Multiple Dimensions When we were considering one-dimensional systems, we saw that subtle changes in parameter
MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation 1 Bifurcations in Multiple Dimensions When we were considering one-dimensional systems, we saw that subtle changes in parameter
4 Second-Order Systems
 4 Second-Order Systems Second-order autonomous systems occupy an important place in the study of nonlinear systems because solution trajectories can be represented in the plane. This allows for easy visualization
4 Second-Order Systems Second-order autonomous systems occupy an important place in the study of nonlinear systems because solution trajectories can be represented in the plane. This allows for easy visualization
Practice Problems for Final Exam
 Math 1280 Spring 2016 Practice Problems for Final Exam Part 2 (Sections 6.6, 6.7, 6.8, and chapter 7) S o l u t i o n s 1. Show that the given system has a nonlinear center at the origin. ẋ = 9y 5y 5,
Math 1280 Spring 2016 Practice Problems for Final Exam Part 2 (Sections 6.6, 6.7, 6.8, and chapter 7) S o l u t i o n s 1. Show that the given system has a nonlinear center at the origin. ẋ = 9y 5y 5,
One Dimensional Dynamical Systems
 16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
NBA Lecture 1. Simplest bifurcations in n-dimensional ODEs. Yu.A. Kuznetsov (Utrecht University, NL) March 14, 2011
 March 14, 2011") NBA Lecture 1 Simplest bifurcations in n-dimensional ODEs Yu.A. Kuznetsov (Utrecht University, NL) March 14, 2011 Contents 1. Solutions and orbits: equilibria cycles connecting orbits other invariant sets
NBA Lecture 1 Simplest bifurcations in n-dimensional ODEs Yu.A. Kuznetsov (Utrecht University, NL) March 14, 2011 Contents 1. Solutions and orbits: equilibria cycles connecting orbits other invariant sets
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
Lecture 5. Outline: Limit Cycles. Definition and examples How to rule out limit cycles. Poincare-Bendixson theorem Hopf bifurcations Poincare maps
 Lecture 5 Outline: Limit Cycles Definition and examples How to rule out limit cycles Gradient systems Liapunov functions Dulacs criterion Poincare-Bendixson theorem Hopf bifurcations Poincare maps Limit
Lecture 5 Outline: Limit Cycles Definition and examples How to rule out limit cycles Gradient systems Liapunov functions Dulacs criterion Poincare-Bendixson theorem Hopf bifurcations Poincare maps Limit
Lecture 3 : Bifurcation Analysis
 Lecture 3 : Bifurcation Analysis D. Sumpter & S.C. Nicolis October - December 2008 D. Sumpter & S.C. Nicolis General settings 4 basic bifurcations (as long as there is only one unstable mode!) steady state
Lecture 3 : Bifurcation Analysis D. Sumpter & S.C. Nicolis October - December 2008 D. Sumpter & S.C. Nicolis General settings 4 basic bifurcations (as long as there is only one unstable mode!) steady state
Complex Dynamic Systems: Qualitative vs Quantitative analysis
 Complex Dynamic Systems: Qualitative vs Quantitative analysis Complex Dynamic Systems Chiara Mocenni Department of Information Engineering and Mathematics University of Siena (mocenni@diism.unisi.it) Dynamic
Complex Dynamic Systems: Qualitative vs Quantitative analysis Complex Dynamic Systems Chiara Mocenni Department of Information Engineering and Mathematics University of Siena (mocenni@diism.unisi.it) Dynamic
Chapter 1 Bifurcations and Chaos in Dynamical Systems
 Chapter 1 Bifurcations and Chaos in Dynamical Systems Complex system theory deals with dynamical systems containing often a large number of variables. It extends dynamical system theory, which deals with
Chapter 1 Bifurcations and Chaos in Dynamical Systems Complex system theory deals with dynamical systems containing often a large number of variables. It extends dynamical system theory, which deals with
Non-Linear Dynamics Homework Solutions Week 6
 Non-Linear Dynamics Homework Solutions Week 6 Chris Small March 6, 2007 Please email me at smachr09@evergreen.edu with any questions or concerns reguarding these solutions. 6.8.3 Locate annd find the index
Non-Linear Dynamics Homework Solutions Week 6 Chris Small March 6, 2007 Please email me at smachr09@evergreen.edu with any questions or concerns reguarding these solutions. 6.8.3 Locate annd find the index
Chaos. Lendert Gelens. KU Leuven - Vrije Universiteit Brussel Nonlinear dynamics course - VUB
 Chaos Lendert Gelens KU Leuven - Vrije Universiteit Brussel www.gelenslab.org Nonlinear dynamics course - VUB Examples of chaotic systems: the double pendulum? θ 1 θ θ 2 Examples of chaotic systems: the
Chaos Lendert Gelens KU Leuven - Vrije Universiteit Brussel www.gelenslab.org Nonlinear dynamics course - VUB Examples of chaotic systems: the double pendulum? θ 1 θ θ 2 Examples of chaotic systems: the
Problem Set Number 2, j/2.036j MIT (Fall 2014)
") Problem Set Number 2, 18.385j/2.036j MIT (Fall 2014) Rodolfo R. Rosales (MIT, Math. Dept.,Cambridge, MA 02139) Due Mon., September 29, 2014. 1 Inverse function problem #01. Statement: Inverse function
Problem Set Number 2, 18.385j/2.036j MIT (Fall 2014) Rodolfo R. Rosales (MIT, Math. Dept.,Cambridge, MA 02139) Due Mon., September 29, 2014. 1 Inverse function problem #01. Statement: Inverse function
Part II. Dynamical Systems. Year
 Part II Year 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2017 34 Paper 1, Section II 30A Consider the dynamical system where β > 1 is a constant. ẋ = x + x 3 + βxy 2, ẏ = y + βx 2
Part II Year 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2017 34 Paper 1, Section II 30A Consider the dynamical system where β > 1 is a constant. ẋ = x + x 3 + βxy 2, ẏ = y + βx 2
11 Chaos in Continuous Dynamical Systems.
 11 CHAOS IN CONTINUOUS DYNAMICAL SYSTEMS. 47 11 Chaos in Continuous Dynamical Systems. Let s consider a system of differential equations given by where x(t) : R R and f : R R. ẋ = f(x), The linearization
11 CHAOS IN CONTINUOUS DYNAMICAL SYSTEMS. 47 11 Chaos in Continuous Dynamical Systems. Let s consider a system of differential equations given by where x(t) : R R and f : R R. ẋ = f(x), The linearization
THREE DIMENSIONAL SYSTEMS. Lecture 6: The Lorenz Equations
 THREE DIMENSIONAL SYSTEMS Lecture 6: The Lorenz Equations 6. The Lorenz (1963) Equations The Lorenz equations were originally derived by Saltzman (1962) as a minimalist model of thermal convection in a
THREE DIMENSIONAL SYSTEMS Lecture 6: The Lorenz Equations 6. The Lorenz (1963) Equations The Lorenz equations were originally derived by Saltzman (1962) as a minimalist model of thermal convection in a
A plane autonomous system is a pair of simultaneous first-order differential equations,
 Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Dynamical systems tutorial. Gregor Schöner, INI, RUB
 Dynamical systems tutorial Gregor Schöner, INI, RUB Dynamical systems: Tutorial the word dynamics time-varying measures range of a quantity forces causing/accounting for movement => dynamical systems dynamical
Dynamical systems tutorial Gregor Schöner, INI, RUB Dynamical systems: Tutorial the word dynamics time-varying measures range of a quantity forces causing/accounting for movement => dynamical systems dynamical
arxiv: v1 [physics.class-ph] 5 Jan 2012
![arxiv: v1 [physics.class-ph] 5 Jan 2012](/thumbs/82/84800191.jpg "arxiv: v1 [physics.class-ph] 5 Jan 2012") Damped bead on a rotating circular hoop - a bifurcation zoo Shovan Dutta Department of Electronics and Telecommunication Engineering, Jadavpur University, Calcutta 700 032, India. Subhankar Ray Department
Damped bead on a rotating circular hoop - a bifurcation zoo Shovan Dutta Department of Electronics and Telecommunication Engineering, Jadavpur University, Calcutta 700 032, India. Subhankar Ray Department
DYNAMICS OF THREE COUPLED VAN DER POL OSCILLATORS WITH APPLICATION TO CIRCADIAN RHYTHMS
 Proceedings of IDETC/CIE 2005 ASME 2005 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference September 24-28, 2005, Long Beach, California USA DETC2005-84017
Proceedings of IDETC/CIE 2005 ASME 2005 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference September 24-28, 2005, Long Beach, California USA DETC2005-84017
ME 680- Spring Geometrical Analysis of 1-D Dynamical Systems
 ME 680- Spring 2014 Geometrical Analysis of 1-D Dynamical Systems 1 Geometrical Analysis of 1-D Dynamical Systems Logistic equation: n = rn(1 n) velocity function Equilibria or fied points : initial conditions
ME 680- Spring 2014 Geometrical Analysis of 1-D Dynamical Systems 1 Geometrical Analysis of 1-D Dynamical Systems Logistic equation: n = rn(1 n) velocity function Equilibria or fied points : initial conditions
MATH 614 Dynamical Systems and Chaos Lecture 24: Bifurcation theory in higher dimensions. The Hopf bifurcation.
 MATH 614 Dynamical Systems and Chaos Lecture 24: Bifurcation theory in higher dimensions. The Hopf bifurcation. Bifurcation theory The object of bifurcation theory is to study changes that maps undergo
MATH 614 Dynamical Systems and Chaos Lecture 24: Bifurcation theory in higher dimensions. The Hopf bifurcation. Bifurcation theory The object of bifurcation theory is to study changes that maps undergo
Stability of Dynamical systems
 Stability of Dynamical systems Stability Isolated equilibria Classification of Isolated Equilibria Attractor and Repeller Almost linear systems Jacobian Matrix Stability Consider an autonomous system u
Stability of Dynamical systems Stability Isolated equilibria Classification of Isolated Equilibria Attractor and Repeller Almost linear systems Jacobian Matrix Stability Consider an autonomous system u
Chapter 7. Nonlinear Systems. 7.1 Introduction
 Nonlinear Systems Chapter 7 The scientist does not study nature because it is useful; he studies it because he delights in it, and he delights in it because it is beautiful. - Jules Henri Poincaré (1854-1912)
Nonlinear Systems Chapter 7 The scientist does not study nature because it is useful; he studies it because he delights in it, and he delights in it because it is beautiful. - Jules Henri Poincaré (1854-1912)
BIFURCATION PHENOMENA Lecture 4: Bifurcations in n-dimensional ODEs
 BIFURCATION PHENOMENA Lecture 4: Bifurcations in n-dimensional ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits: equilibria cycles connecting orbits compact invariant manifolds strange
BIFURCATION PHENOMENA Lecture 4: Bifurcations in n-dimensional ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits: equilibria cycles connecting orbits compact invariant manifolds strange
Lecture 6. Lorenz equations and Malkus' waterwheel Some properties of the Lorenz Eq.'s Lorenz Map Towards definitions of:
 Lecture 6 Chaos Lorenz equations and Malkus' waterwheel Some properties of the Lorenz Eq.'s Lorenz Map Towards definitions of: Chaos, Attractors and strange attractors Transient chaos Lorenz Equations
Lecture 6 Chaos Lorenz equations and Malkus' waterwheel Some properties of the Lorenz Eq.'s Lorenz Map Towards definitions of: Chaos, Attractors and strange attractors Transient chaos Lorenz Equations
Nonlinear Dynamics and Chaos
 Ian Eisenman eisenman@fas.harvard.edu Geological Museum 101, 6-6352 Nonlinear Dynamics and Chaos Review of some of the topics covered in homework problems, based on section notes. December, 2005 Contents
Ian Eisenman eisenman@fas.harvard.edu Geological Museum 101, 6-6352 Nonlinear Dynamics and Chaos Review of some of the topics covered in homework problems, based on section notes. December, 2005 Contents
APPPHYS217 Tuesday 25 May 2010
 APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
Towards a Global Theory of Singularly Perturbed Dynamical Systems John Guckenheimer Cornell University
 Towards a Global Theory of Singularly Perturbed Dynamical Systems John Guckenheimer Cornell University Dynamical systems with multiple time scales arise naturally in many domains. Models of neural systems
Towards a Global Theory of Singularly Perturbed Dynamical Systems John Guckenheimer Cornell University Dynamical systems with multiple time scales arise naturally in many domains. Models of neural systems
PHY411 Lecture notes Part 4
 PHY411 Lecture notes Part 4 Alice Quillen February 1, 2016 Contents 0.1 Introduction.................................... 2 1 Bifurcations of one-dimensional dynamical systems 2 1.1 Saddle-node bifurcation.............................
PHY411 Lecture notes Part 4 Alice Quillen February 1, 2016 Contents 0.1 Introduction.................................... 2 1 Bifurcations of one-dimensional dynamical systems 2 1.1 Saddle-node bifurcation.............................
Problem Set 5 Solutions
 Problem Set 5 Solutions Dorian Abbot APM47 0/8/04. (a) We consider π θ π. The pendulum pointin down corresponds to θ=0 and the pendulum pointin up corresponds to θ π. Define ν θ. The system can be rewritten:
Problem Set 5 Solutions Dorian Abbot APM47 0/8/04. (a) We consider π θ π. The pendulum pointin down corresponds to θ=0 and the pendulum pointin up corresponds to θ π. Define ν θ. The system can be rewritten:
STABILITY. Phase portraits and local stability
 MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
ONE DIMENSIONAL FLOWS. Lecture 3: Bifurcations
 ONE DIMENSIONAL FLOWS Lecture 3: Bifurcations 3. Bifurcations Here we show that, although the dynamics of one-dimensional systems is very limited [all solutions either settle down to a steady equilibrium
ONE DIMENSIONAL FLOWS Lecture 3: Bifurcations 3. Bifurcations Here we show that, although the dynamics of one-dimensional systems is very limited [all solutions either settle down to a steady equilibrium
5.2.2 Planar Andronov-Hopf bifurcation
 138 CHAPTER 5. LOCAL BIFURCATION THEORY 5.. Planar Andronov-Hopf bifurcation What happens if a planar system has an equilibrium x = x 0 at some parameter value α = α 0 with eigenvalues λ 1, = ±iω 0, ω
138 CHAPTER 5. LOCAL BIFURCATION THEORY 5.. Planar Andronov-Hopf bifurcation What happens if a planar system has an equilibrium x = x 0 at some parameter value α = α 0 with eigenvalues λ 1, = ±iω 0, ω
WIDELY SEPARATED FREQUENCIES IN COUPLED OSCILLATORS WITH ENERGY-PRESERVING QUADRATIC NONLINEARITY
 WIDELY SEPARATED FREQUENCIES IN COUPLED OSCILLATORS WITH ENERGY-PRESERVING QUADRATIC NONLINEARITY J.M. TUWANKOTTA Abstract. In this paper we present an analysis of a system of coupled oscillators suggested
WIDELY SEPARATED FREQUENCIES IN COUPLED OSCILLATORS WITH ENERGY-PRESERVING QUADRATIC NONLINEARITY J.M. TUWANKOTTA Abstract. In this paper we present an analysis of a system of coupled oscillators suggested
Calculus and Differential Equations II
 MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
Dynamical Systems in Neuroscience: Elementary Bifurcations
 Dynamical Systems in Neuroscience: Elementary Bifurcations Foris Kuang May 2017 1 Contents 1 Introduction 3 2 Definitions 3 3 Hodgkin-Huxley Model 3 4 Morris-Lecar Model 4 5 Stability 5 5.1 Linear ODE..............................................
Dynamical Systems in Neuroscience: Elementary Bifurcations Foris Kuang May 2017 1 Contents 1 Introduction 3 2 Definitions 3 3 Hodgkin-Huxley Model 3 4 Morris-Lecar Model 4 5 Stability 5 5.1 Linear ODE..............................................
Hopf bifurcation with zero frequency and imperfect SO(2) symmetry
 symmetry") Hopf bifurcation with zero frequency and imperfect SO(2) symmetry F. Marques a,, A. Meseguer a, J. M. Lopez b, J. R. Pacheco b,c a Departament de Física Aplicada, Universitat Politècnica de Catalunya,
Hopf bifurcation with zero frequency and imperfect SO(2) symmetry F. Marques a,, A. Meseguer a, J. M. Lopez b, J. R. Pacheco b,c a Departament de Física Aplicada, Universitat Politècnica de Catalunya,
10 Back to planar nonlinear systems
 10 Back to planar nonlinear sstems 10.1 Near the equilibria Recall that I started talking about the Lotka Volterra model as a motivation to stud sstems of two first order autonomous equations of the form
10 Back to planar nonlinear sstems 10.1 Near the equilibria Recall that I started talking about the Lotka Volterra model as a motivation to stud sstems of two first order autonomous equations of the form
2.10 Saddles, Nodes, Foci and Centers
 2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
MIXED-MODE OSCILLATIONS WITH MULTIPLE TIME SCALES
 MIXED-MODE OSCILLATIONS WITH MULTIPLE TIME SCALES MATHIEU DESROCHES, JOHN GUCKENHEIMER, BERND KRAUSKOPF, CHRISTIAN KUEHN, HINKE M OSINGA, MARTIN WECHSELBERGER Abstract Mixed-mode oscillations (MMOs) are
MIXED-MODE OSCILLATIONS WITH MULTIPLE TIME SCALES MATHIEU DESROCHES, JOHN GUCKENHEIMER, BERND KRAUSKOPF, CHRISTIAN KUEHN, HINKE M OSINGA, MARTIN WECHSELBERGER Abstract Mixed-mode oscillations (MMOs) are
LECTURE 8: DYNAMICAL SYSTEMS 7
 15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
Spike-adding canard explosion of bursting oscillations
 Spike-adding canard explosion of bursting oscillations Paul Carter Mathematical Institute Leiden University Abstract This paper examines a spike-adding bifurcation phenomenon whereby small amplitude canard
Spike-adding canard explosion of bursting oscillations Paul Carter Mathematical Institute Leiden University Abstract This paper examines a spike-adding bifurcation phenomenon whereby small amplitude canard
Nonlinear Control Lecture 2:Phase Plane Analysis
 Nonlinear Control Lecture 2:Phase Plane Analysis Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2010 r. Farzaneh Abdollahi Nonlinear Control Lecture 2 1/53
Nonlinear Control Lecture 2:Phase Plane Analysis Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2010 r. Farzaneh Abdollahi Nonlinear Control Lecture 2 1/53
DYNAMICAL SYSTEMS WITH A CODIMENSION-ONE INVARIANT MANIFOLD: THE UNFOLDINGS AND ITS BIFURCATIONS
 International Journal of Bifurcation and Chaos c World Scientific Publishing Company DYNAMICAL SYSTEMS WITH A CODIMENSION-ONE INVARIANT MANIFOLD: THE UNFOLDINGS AND ITS BIFURCATIONS KIE VAN IVANKY SAPUTRA
International Journal of Bifurcation and Chaos c World Scientific Publishing Company DYNAMICAL SYSTEMS WITH A CODIMENSION-ONE INVARIANT MANIFOLD: THE UNFOLDINGS AND ITS BIFURCATIONS KIE VAN IVANKY SAPUTRA
Clearly the passage of an eigenvalue through to the positive real half plane leads to a qualitative change in the phase portrait, i.e.
 Bifurcations We have already seen how the loss of stiffness in a linear oscillator leads to instability. In a practical situation the stiffness may not degrade in a linear fashion, and instability may
Bifurcations We have already seen how the loss of stiffness in a linear oscillator leads to instability. In a practical situation the stiffness may not degrade in a linear fashion, and instability may
Limit Cycles II. Prof. Ned Wingreen MOL 410/510. How to prove a closed orbit exists?
 Limit Cycles II Prof. Ned Wingreen MOL 410/510 How to prove a closed orbit eists? numerically Poincaré-Bendison Theorem: If 1. R is a closed, bounded subset of the plane. = f( ) is a continuously differentiable
Limit Cycles II Prof. Ned Wingreen MOL 410/510 How to prove a closed orbit eists? numerically Poincaré-Bendison Theorem: If 1. R is a closed, bounded subset of the plane. = f( ) is a continuously differentiable
On a Codimension Three Bifurcation Arising in a Simple Dynamo Model
 On a Codimension Three Bifurcation Arising in a Simple Dynamo Model Anne C. Skeldon a,1 and Irene M. Moroz b a Department of Mathematics, City University, Northampton Square, London EC1V 0HB, England b
On a Codimension Three Bifurcation Arising in a Simple Dynamo Model Anne C. Skeldon a,1 and Irene M. Moroz b a Department of Mathematics, City University, Northampton Square, London EC1V 0HB, England b
Computational Neuroscience. Session 4-2
 Computational Neuroscience. Session 4-2 Dr. Marco A Roque Sol 06/21/2018 Two-Dimensional Two-Dimensional System In this section we will introduce methods of phase plane analysis of two-dimensional systems.
Computational Neuroscience. Session 4-2 Dr. Marco A Roque Sol 06/21/2018 Two-Dimensional Two-Dimensional System In this section we will introduce methods of phase plane analysis of two-dimensional systems.
The Higgins-Selkov oscillator
 The Higgins-Selkov oscillator May 14, 2014 Here I analyse the long-time behaviour of the Higgins-Selkov oscillator. The system is ẋ = k 0 k 1 xy 2, (1 ẏ = k 1 xy 2 k 2 y. (2 The unknowns x and y, being
The Higgins-Selkov oscillator May 14, 2014 Here I analyse the long-time behaviour of the Higgins-Selkov oscillator. The system is ẋ = k 0 k 1 xy 2, (1 ẏ = k 1 xy 2 k 2 y. (2 The unknowns x and y, being
The Hopf-van der Pol System: Failure of a Homotopy Method
 DOI.7/s259--9-5 ORIGINAL RESEARCH The Hopf-van der Pol System: Failure of a Homotopy Method H. G. E. Meijer T. Kalmár-Nagy Foundation for Scientific Research and Technological Innovation 2 Abstract The
DOI.7/s259--9-5 ORIGINAL RESEARCH The Hopf-van der Pol System: Failure of a Homotopy Method H. G. E. Meijer T. Kalmár-Nagy Foundation for Scientific Research and Technological Innovation 2 Abstract The
Introduction to Applied Nonlinear Dynamical Systems and Chaos
 Stephen Wiggins Introduction to Applied Nonlinear Dynamical Systems and Chaos Second Edition With 250 Figures 4jj Springer I Series Preface v L I Preface to the Second Edition vii Introduction 1 1 Equilibrium
Stephen Wiggins Introduction to Applied Nonlinear Dynamical Systems and Chaos Second Edition With 250 Figures 4jj Springer I Series Preface v L I Preface to the Second Edition vii Introduction 1 1 Equilibrium
Phase portraits in two dimensions
 Phase portraits in two dimensions 8.3, Spring, 999 It [ is convenient to represent the solutions to an autonomous system x = f( x) (where x x = ) by means of a phase portrait. The x, y plane is called
Phase portraits in two dimensions 8.3, Spring, 999 It [ is convenient to represent the solutions to an autonomous system x = f( x) (where x x = ) by means of a phase portrait. The x, y plane is called
Elsevier Editorial System(tm) for Physica D: Nonlinear Phenomena Manuscript Draft
 for Physica D: Nonlinear Phenomena Manuscript Draft") Elsevier Editorial System(tm) for Physica D: Nonlinear Phenomena Manuscript Draft Manuscript Number: Title: Hopf bifurcation with zero frequency and imperfect SO(2) symmetry Article Type: Full Length Article
Elsevier Editorial System(tm) for Physica D: Nonlinear Phenomena Manuscript Draft Manuscript Number: Title: Hopf bifurcation with zero frequency and imperfect SO(2) symmetry Article Type: Full Length Article
A Study of the Van der Pol Equation
 A Study of the Van der Pol Equation Kai Zhe Tan, s1465711 September 16, 2016 Abstract The Van der Pol equation is famous for modelling biological systems as well as being a good model to study its multiple
A Study of the Van der Pol Equation Kai Zhe Tan, s1465711 September 16, 2016 Abstract The Van der Pol equation is famous for modelling biological systems as well as being a good model to study its multiple
Complex Behavior in Coupled Nonlinear Waveguides. Roy Goodman, New Jersey Institute of Technology
 Complex Behavior in Coupled Nonlinear Waveguides Roy Goodman, New Jersey Institute of Technology Nonlinear Schrödinger/Gross-Pitaevskii Equation i t = r + V (r) ± Two contexts for today: Propagation of
Complex Behavior in Coupled Nonlinear Waveguides Roy Goodman, New Jersey Institute of Technology Nonlinear Schrödinger/Gross-Pitaevskii Equation i t = r + V (r) ± Two contexts for today: Propagation of
2 Lecture 2: Amplitude equations and Hopf bifurcations
 Lecture : Amplitude equations and Hopf bifurcations This lecture completes the brief discussion of steady-state bifurcations by discussing vector fields that describe the dynamics near a bifurcation. From
Lecture : Amplitude equations and Hopf bifurcations This lecture completes the brief discussion of steady-state bifurcations by discussing vector fields that describe the dynamics near a bifurcation. From
CONTROLLING IN BETWEEN THE LORENZ AND THE CHEN SYSTEMS
 International Journal of Bifurcation and Chaos, Vol. 12, No. 6 (22) 1417 1422 c World Scientific Publishing Company CONTROLLING IN BETWEEN THE LORENZ AND THE CHEN SYSTEMS JINHU LÜ Institute of Systems
International Journal of Bifurcation and Chaos, Vol. 12, No. 6 (22) 1417 1422 c World Scientific Publishing Company CONTROLLING IN BETWEEN THE LORENZ AND THE CHEN SYSTEMS JINHU LÜ Institute of Systems
Chapter 24 BIFURCATIONS
 Chapter 24 BIFURCATIONS Abstract Keywords: Phase Portrait Fixed Point Saddle-Node Bifurcation Diagram Codimension-1 Hysteresis Hopf Bifurcation SNIC Page 1 24.1 Introduction In linear systems, responses
Chapter 24 BIFURCATIONS Abstract Keywords: Phase Portrait Fixed Point Saddle-Node Bifurcation Diagram Codimension-1 Hysteresis Hopf Bifurcation SNIC Page 1 24.1 Introduction In linear systems, responses
Edward Lorenz. Professor of Meteorology at the Massachusetts Institute of Technology
 The Lorenz system Edward Lorenz Professor of Meteorology at the Massachusetts Institute of Technology In 1963 derived a three dimensional system in efforts to model long range predictions for the weather
The Lorenz system Edward Lorenz Professor of Meteorology at the Massachusetts Institute of Technology In 1963 derived a three dimensional system in efforts to model long range predictions for the weather
Shilnikov bifurcations in the Hopf-zero singularity
 Shilnikov bifurcations in the Hopf-zero singularity Geometry and Dynamics in interaction Inma Baldomá, Oriol Castejón, Santiago Ibáñez, Tere M-Seara Observatoire de Paris, 15-17 December 2017, Paris Tere
Shilnikov bifurcations in the Hopf-zero singularity Geometry and Dynamics in interaction Inma Baldomá, Oriol Castejón, Santiago Ibáñez, Tere M-Seara Observatoire de Paris, 15-17 December 2017, Paris Tere
arxiv: v1 [nlin.cd] 28 Sep 2017
![arxiv: v1 [nlin.cd] 28 Sep 2017](/thumbs/85/92622252.jpg "arxiv: v1 [nlin.cd] 28 Sep 2017") Bifurcations of a Van der Pol oscillator in a double well Satadal Datta Harish-Chandra research Institute, HBNI, Chhatnag Road, Jhunsi, Allahabad-09, INDIA satadaldatta@gmail.com arxiv:709.06v [nlin.cd]
Bifurcations of a Van der Pol oscillator in a double well Satadal Datta Harish-Chandra research Institute, HBNI, Chhatnag Road, Jhunsi, Allahabad-09, INDIA satadaldatta@gmail.com arxiv:709.06v [nlin.cd]
Math 4200, Problem set 3
 Math, Problem set 3 Solutions September, 13 Problem 1. ẍ = ω x. Solution. Following the general theory of conservative systems with one degree of freedom let us define the kinetic energy T and potential
Math, Problem set 3 Solutions September, 13 Problem 1. ẍ = ω x. Solution. Following the general theory of conservative systems with one degree of freedom let us define the kinetic energy T and potential
Nonlinear Control Lecture 2:Phase Plane Analysis
 Nonlinear Control Lecture 2:Phase Plane Analysis Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2009 Farzaneh Abdollahi Nonlinear Control Lecture 2 1/68
Nonlinear Control Lecture 2:Phase Plane Analysis Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2009 Farzaneh Abdollahi Nonlinear Control Lecture 2 1/68
EE222 - Spring 16 - Lecture 2 Notes 1
 EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
8.1 Bifurcations of Equilibria
 1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
Bifurcation Analysis of Non-linear Differential Equations
 Bifurcation Analysis of Non-linear Differential Equations Caitlin McCann 0064570 Supervisor: Dr. Vasiev September 01 - May 013 Contents 1 Introduction 3 Definitions 4 3 Ordinary Differential Equations
Bifurcation Analysis of Non-linear Differential Equations Caitlin McCann 0064570 Supervisor: Dr. Vasiev September 01 - May 013 Contents 1 Introduction 3 Definitions 4 3 Ordinary Differential Equations
Chimera States in Nonlocal Phase-coupled Oscillators. Jianbo Xie. A dissertation submitted in partial satisfaction of the
 Chimera States in Nonlocal Phase-coupled Oscillators by Jianbo Xie A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Physics in the Graduate
Chimera States in Nonlocal Phase-coupled Oscillators by Jianbo Xie A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Physics in the Graduate
UNIVERSITY of LIMERICK
 UNIVERSITY of LIMERICK OLLSCOIL LUIMNIGH Faculty of Science and Engineering Department of Mathematics & Statistics END OF SEMESTER ASSESSMENT PAPER MODULE CODE: MS08 SEMESTER: Spring 0 MODULE TITLE: Dynamical
UNIVERSITY of LIMERICK OLLSCOIL LUIMNIGH Faculty of Science and Engineering Department of Mathematics & Statistics END OF SEMESTER ASSESSMENT PAPER MODULE CODE: MS08 SEMESTER: Spring 0 MODULE TITLE: Dynamical
Solution to Homework #4 Roy Malka
 1. Show that the map: Solution to Homework #4 Roy Malka F µ : x n+1 = x n + µ x 2 n x n R (1) undergoes a saddle-node bifurcation at (x, µ) = (0, 0); show that for µ < 0 it has no fixed points whereas
1. Show that the map: Solution to Homework #4 Roy Malka F µ : x n+1 = x n + µ x 2 n x n R (1) undergoes a saddle-node bifurcation at (x, µ) = (0, 0); show that for µ < 0 it has no fixed points whereas
Numerical techniques: Deterministic Dynamical Systems
 Numerical techniques: Deterministic Dynamical Systems Henk Dijkstra Institute for Marine and Atmospheric research Utrecht, Department of Physics and Astronomy, Utrecht, The Netherlands Transition behavior
Numerical techniques: Deterministic Dynamical Systems Henk Dijkstra Institute for Marine and Atmospheric research Utrecht, Department of Physics and Astronomy, Utrecht, The Netherlands Transition behavior
Lectures on Dynamical Systems. Anatoly Neishtadt
 Lectures on Dynamical Systems Anatoly Neishtadt Lectures for Mathematics Access Grid Instruction and Collaboration (MAGIC) consortium, Loughborough University, 2007 Part 3 LECTURE 14 NORMAL FORMS Resonances
Lectures on Dynamical Systems Anatoly Neishtadt Lectures for Mathematics Access Grid Instruction and Collaboration (MAGIC) consortium, Loughborough University, 2007 Part 3 LECTURE 14 NORMAL FORMS Resonances
Problem Set Number 5, j/2.036j MIT (Fall 2014)
") Problem Set Number 5, 18.385j/2.036j MIT (Fall 2014) Rodolfo R. Rosales (MIT, Math. Dept.,Cambridge, MA 02139) Due Fri., October 24, 2014. October 17, 2014 1 Large µ limit for Liénard system #03 Statement:
Problem Set Number 5, 18.385j/2.036j MIT (Fall 2014) Rodolfo R. Rosales (MIT, Math. Dept.,Cambridge, MA 02139) Due Fri., October 24, 2014. October 17, 2014 1 Large µ limit for Liénard system #03 Statement:
Half of Final Exam Name: Practice Problems October 28, 2014
 Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
Introduction to bifurcations
 Introduction to bifurcations Marc R. Roussel September 6, Introduction Most dynamical systems contain parameters in addition to variables. A general system of ordinary differential equations (ODEs) could
Introduction to bifurcations Marc R. Roussel September 6, Introduction Most dynamical systems contain parameters in addition to variables. A general system of ordinary differential equations (ODEs) could
On dynamical properties of multidimensional diffeomorphisms from Newhouse regions: I
 IOP PUBLISHING Nonlinearity 2 (28) 923 972 NONLINEARITY doi:.88/95-775/2/5/3 On dynamical properties of multidimensional diffeomorphisms from Newhouse regions: I S V Gonchenko, L P Shilnikov and D V Turaev
IOP PUBLISHING Nonlinearity 2 (28) 923 972 NONLINEARITY doi:.88/95-775/2/5/3 On dynamical properties of multidimensional diffeomorphisms from Newhouse regions: I S V Gonchenko, L P Shilnikov and D V Turaev
A Producer-Consumer Model With Stoichiometry
 A Producer-Consumer Model With Stoichiometry Plan B project toward the completion of the Master of Science degree in Mathematics at University of Minnesota Duluth Respectfully submitted by Laura Joan Zimmermann
A Producer-Consumer Model With Stoichiometry Plan B project toward the completion of the Master of Science degree in Mathematics at University of Minnesota Duluth Respectfully submitted by Laura Joan Zimmermann
ẋ = f(x, y), ẏ = g(x, y), (x, y) D, can only have periodic solutions if (f,g) changes sign in D or if (f,g)=0in D.
, ẏ = g(x, y), (x, y) D, can only have periodic solutions if (f,g) changes sign in D or if (f,g)=0in D.") 4 Periodic Solutions We have shown that in the case of an autonomous equation the periodic solutions correspond with closed orbits in phase-space. Autonomous two-dimensional systems with phase-space R
4 Periodic Solutions We have shown that in the case of an autonomous equation the periodic solutions correspond with closed orbits in phase-space. Autonomous two-dimensional systems with phase-space R
Problem Set Number 02, j/2.036j MIT (Fall 2018)
") Problem Set Number 0, 18.385j/.036j MIT (Fall 018) Rodolfo R. Rosales (MIT, Math. Dept., room -337, Cambridge, MA 0139) September 6, 018 Due October 4, 018. Turn it in (by 3PM) at the Math. Problem Set
Problem Set Number 0, 18.385j/.036j MIT (Fall 018) Rodolfo R. Rosales (MIT, Math. Dept., room -337, Cambridge, MA 0139) September 6, 018 Due October 4, 018. Turn it in (by 3PM) at the Math. Problem Set
Solution to Homework #5 Roy Malka 1. Questions 2,3,4 of Homework #5 of M. Cross class. dv (x) dx
 dx") Solution to Homework #5 Roy Malka. Questions 2,,4 of Homework #5 of M. Cross class. Bifurcations: (M. Cross) Consider the bifurcations of the stationary solutions of a particle undergoing damped one dimensional
Solution to Homework #5 Roy Malka. Questions 2,,4 of Homework #5 of M. Cross class. Bifurcations: (M. Cross) Consider the bifurcations of the stationary solutions of a particle undergoing damped one dimensional
ENGI Duffing s Equation Page 4.65
 ENGI 940 4. - Duffing s Equation Page 4.65 4. Duffing s Equation Among the simplest models of damped non-linear forced oscillations of a mechanical or electrical system with a cubic stiffness term is Duffing
ENGI 940 4. - Duffing s Equation Page 4.65 4. Duffing s Equation Among the simplest models of damped non-linear forced oscillations of a mechanical or electrical system with a cubic stiffness term is Duffing
Vector Field Topology. Ronald Peikert SciVis Vector Field Topology 8-1
 Vector Field Topology Ronald Peikert SciVis 2007 - Vector Field Topology 8-1 Vector fields as ODEs What are conditions for existence and uniqueness of streamlines? For the initial value problem i x ( t)
Vector Field Topology Ronald Peikert SciVis 2007 - Vector Field Topology 8-1 Vector fields as ODEs What are conditions for existence and uniqueness of streamlines? For the initial value problem i x ( t)
BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs
 BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits. 2. Equilibria. 3. Periodic orbits and limit cycles. 4. Homoclinic orbits.
BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits. 2. Equilibria. 3. Periodic orbits and limit cycles. 4. Homoclinic orbits.