Flow in Pipes Simulation Using Successive Substitution Method
|
|
|
- Abel George
- 5 years ago
- Views:
Transcription
1 Flow in Pipes Simulation Using Successive Substitution Method Dr. Ismail Al-Rawi Arab Open University, (Kuwait Branch), P.O 830 Al Ardia, P.C 92400, Kuwait Abstract The aim of this paper is to present the implementation of mathematical model to simulate the flow of fluid and gas in pipes network consisted of a number of horizontal pipes of specified diameters and length, joined at a number of nodes, and to compute the pressure, the flow rate, and the direction of flow at each node. Such simulation allows predicting the behavior of the fluid network system under different conditions. Such prediction can be effectively used to give decisions regarding the design and the operation of the real system. This model adopt the successive substitution method as a numerical technique to solve non-linear equation using a fixed-point iteration. Keywords: Flow in Pipes Network, Successive Substitution Method, Numerical Methods, Fixed Point Iterations. 1. Introduction Fluid flow in pipes is much encountered in our daily life and industry. The hot and cold water that we use in our homes is pumped through pipes. Water in a city is distributed by extensive piping networks. Oil and natural gas are transported hundreds long distance by large pipelines. In our body, blood is carried out by arteries and veins. The cooling water in an engine is transported by pipes in the radiator where it is cooled as it flows. Thermal energy is transferred to the desired locations through pipes. [1] There are many good modules around to simulate the flow in pipes, but our aims here is to find a module, which depends on a simple and efficient mathematical concepts that can be programmed and computed easily. The modules has to counts for time-dependent change in the state of the system and counts all parameters in a continuous manner. [2]. choosing the iterative technique is the key point of the solution methods, and always should answer two basic questions: first, does the iteration converge?. Second, if so, how fast does it converge?. The first question is more important to be answered, in one sense it can be answered easily, and in another too hard to be answered. It is easy to be answered simply because there is a little difficulty in showing that if the initial approximation(s) α of F(x) = 0 are sufficiently close to the root, the iteration will converge to α. In few cases, the iteration will converge to the root independent of the initial approximation. The hard part of answering the question comes from the phrase sufficiently close or how close to the root that is generally depends on the derivative value of f(x) at some unknown points on the interval spanned by the initial approximations [3]. In practice, to ensure the convergence, enough priori knowledge of the desired root is needed. When the prior knowledge is poor, it is recommended to use a method, which converges independent of the starting value until a good approximation is obtained and then switch over to a more rapidly converging method. Solving a system of nonlinear equations is a problem that is avoided when possible, customarily by approximating the nonlinear system by a system of linear equations. When this is unsatisfactory, the problem must be tackled directly. The most straightforward approaches to adapt the methods, which approximate the solutions of a single nonlinear equation in one variable, to apply when the single-variable problem is replaced by a vector problem that incorporates all the variables. [4]. The principal tool to solve the non-linear equations was found in many methods mainly Newton-Raphson method, a technique that is quadratically convergent. This technique has a number of drawbacks. It is quite costly to apply. Poor convergence characteristics when division by zero occurs for some values of the roots. Divergence at inflection points, the method may start to diverge away from the root and it may start converging again to the root. In some case where the function f (x) is oscillating and has a number of roots, one may choose an initial guess close to a root. However, the guesses may jump and converge to some other root. (5). The Other well-known method to solve the non-linear equation is the bisection method, which is One of the first numerical methods developed to find the root of a nonlinear equation (also called binary-search method). It is based on finding the root between two points; therefore, the method falls under the category of bracketing methods. The advantage of this method is always convergent. Since the method brackets the root, the method is guaranteed to converge. As iterations are conducted, the interval gets halved, so one can guarantee the error in the solution of the equation. A number of drawbacks are also found. The convergence of the method is slow as it is simply based on halving the interval. If one of the initial guesses is closer to the root, it will take larger number of iterations to reach the root. [6]. Other methods like false-position and secant method are also used as alternate methods to solve a nonlinear equation, but also a number of drawbacks are exist. [7][8]. 2. Method of solution Our engineering principles are simulated by solving a non-linear functional equation consisted of n real functions 7
2 with n unknown real variables such as: f 1 (x 1, x 2, x 3 x n) = 0 f 2 (x 1, x 2, x 3 x n) = 0... f n (x 1, x 2, x 3 x n) = 0 If we say x = [x 1, x 2, x 3 x n] t then we shall write f i (x) = fi (x 1, x 2, x 3 x n) when 1 i n. This will lead to solve equation in the form of x i = F i (x) such that x = g(x). The method of solving x = g(x) which we shall investigate is that of SUCCSSIVE SUBSTITUTING or Fixed point Iteration Method [9]. Iteration is a fundamental principle in computer science. A process is repeated until an answer is reached. Iterative techniques are used to find roots of equations, solutions of linear and nonlinear systems of equations, and solutions of differential equations. To start the iteration, a function g (x) for computing successive terms is needed, together with a starting value P 0. Then a sequence of values {p k} is obtained using the iterative rule p k+1 = g (p k). The sequence has the pattern of the following: P 0 (starting value) p 1 = g (p 0) p 2 = g (p 1) p k = g (p k-1) What can we learn from an unending sequence of numbers? If the numbers tend to a limit, we suspect that it is the answer [10]. A fixed point of a function g (x) is a number p such that p = g (p), so it is not a root of the equation x = g (x), it is a solution of the equation x = g (x). Figure-1 show the fixed points of the function g (x) as the intersection of the curve y = g(x) and the line y = x. Figure-1 Figure-2 Figure-2 shows how the Fixed Point Iteration works. Let p 0 approximate a solution for the equation x = g (x). Generate the sequence {p n} recursively by the relation p n = g (p n-1), n= 1, 2, 3....that may converge to the root α, and may be shown by Figure-3. We also notice that the root of x = F(x) can be expressed by lim x n = x. Figure-3 8
3 3. Problem statement A network consists of a number of horizontal pipes, of specified diameters and lengths, that are joined at n nodes, numbered I = 1, 2, n. The pressure is specified at some of these nodes. There is at most a single pipe connected directly between any two nodes. We wrote a C program that will accept the above information, and will proceed to compute: (a) the pressures at all remaining nodes, and (b) the flow rate (and direction) in each pipe. 4. Simulation Principles For flow of a liquid from point, I to point j in a horizontal pipe the pressure drop is given by the Fanning equation: Here f M is the dimensionless Moody friction factor, P is the liquid density, u m is the mean velocity, and Land D are the length and diameter of the pipe, respectively. Since the volumetric flow rate is Q = (πd 2 /4)u m, equation (1) becomes: Here, all quantities are in consistent units. However, if P i and P j expressed in psi (Ib f / sq in.), p in (Ib m / cu ft), Q in (gallons / min), L in ft, and D in inches, we obtain: Where If C ij = CL ij l D ij5, where the subscripts ij now emphasize that we are concerned with the pipe joining nodes i and j. The flow rate Q ij between nodes i and j is then given by: in which Q ij is plus or minus for flow from i to j or vice versa, respectively. In the following version, Q ij will automatically have the correct sign: At any free node j, where the pressure is not specified, the sum of the flows from neighboring nodes i must be zero: When applied at all free nodes, equation (5) yields a system of nonlinear simultaneous equations in the unknown pressures. We shall solve this system by the method of successive - substitution. First, we note that ( p i - p j ) is more sensitive than ( p i - p j ) 1/2 to variations in p j. Thus an appropriate version, analogous to equation x i = F(x) is: 9
4 In which Equation (6) is applied repeatedly at all free nodes until either each computed pressure p j does not change by more than a small amount ϵ from one iteration to the next, or a preassigned number of iterations, itmax, has been exceeded. The most recently estimated values of p i will always be used in the right-hand side of equation (6). In order to implement the above, we also introduce the following: (a) A vector of logical values, p 1, p 2.. p n ( PGIVEN in the program ), such that p j is true (T) if the pressure is specified at node j and false (F) if it is not. (b) A matrix of logical values, I I nn (the incidence matrix INCID in the program), such that I ij is true if there is a pipe directly joining nodes i and j, and false if not. Since the incidence, diameter, and length matrices are symmetric (for example D ij = D jj) we need to supply only the lower triangular portions of such matrices as data. The input data will also include a complete set of pressures, p 1, p 2,... p n; some of these will be the known pressures, and the remainder will be the starting guesses at the free nodes. 5. Simulation Methods and Programming Notes Figure-5 represents the flowchart that show the simulation process that are implemented in C-Program which reads a description of the topology of an arbitrary n node pipe network with pressures specified at particular nodes, and then computes the pressures at the remaining nodes and the inter-nodal flow rates using a method of SUCCESSIVE SUBSTITUTIONS. List of used variables and Program Symbol Definition A Matrix, whose elements a ij are defined by equation (7). C Matrix, whose elements c ij relate the flow rate to the pressure drop in the pipe joining nodes i and j. CONV Logical variable used in testing for convergence, conv. D. L Matrices, whose elements D ij and L ij give the diameter (in.) and length (ft) of the pipe joining nodes i and j. DENOM Storage for the denominator of equation (6), den. NUMER Storage for the numerator of equation (6), num. EPS Tolerance, ϵ, used in testing for convergence. F Moody friction factor, f m (assumed constant). FACTOR The constant, c, in equation (3). I.J Indices for representing the nodes i and j. INCID Matrix of logical values, I; if I ij is T, there is a pipe joining nodes i and j; if F, there is not. ITER Counter on the number of iterations, iter. IPRINT Logical variable, which must have the value T if intermediate approximations to the pressures are to be printed. ITMAX Upper limit on the number of iterations, itmax. N Total number of nodes, n. P Vector of pressures, p i (psi), at each node. PGIVEN Vector of logical values, p i at each node. If P i is T, the pressure is specified at node i; if F, it is not. Q Matrix, whose elements Q ij give the flow rate (gpm) from node i to node j. RHO Density of the liquid in the pipes, p (lb m / cu ft). SAVEP Temporary storage for old pressure p, during convergence testing, p. If INCID(I, J) is true, then nodes I and J are connected by a pipe segment of diameter D(I,J) inches and length L(I,J) feet. If PGIVEN(I) is true, the pressure at node I, P(I) psi, is fixed. Otherwise, P (I) assumes successive estimates of the pressure at node I. rho is the fluid density in lb/cu ft and f is the pipe friction factor, assumed identical for all pipe segments. ITER is the iteration counter. Iteration is stopped when ITER exceeds ITMAX or 10
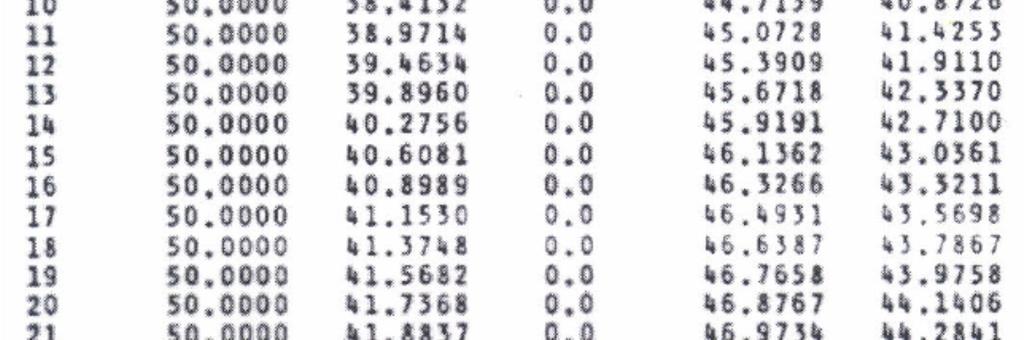
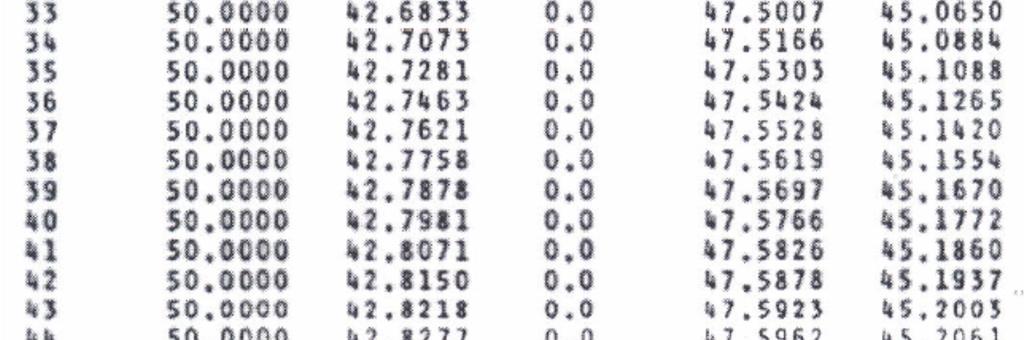
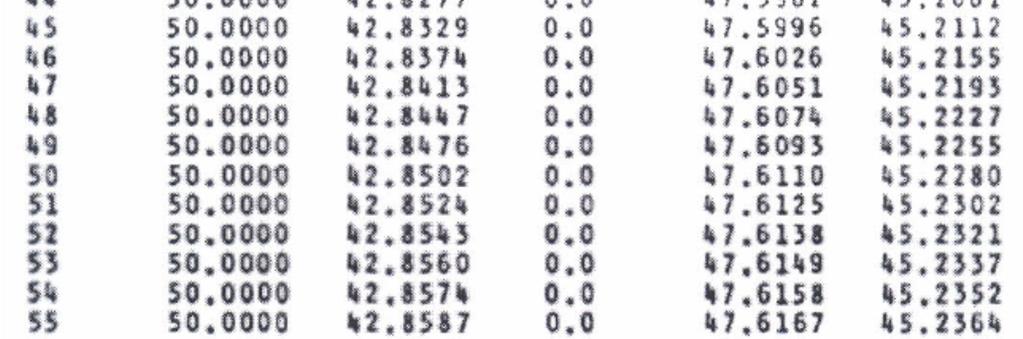
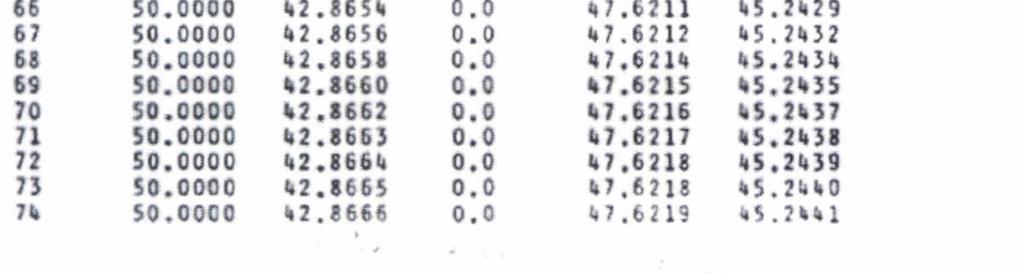
5 when no nodal pressure changes by an amount greater than EPS psi between two successive iterations. Q(I,J) is the flow rate in gal/min between nodes I and J. when Q(I,J) is positive, fluid flows from node I to node J. When IPRINT is true, intermediate approximations of the nodal pressures are printed. 6. Discussion of Results The initial data used in the simulation is shown in Figure-6 and relate to the network that shown in the Figure-7, with f m = 0.056, p=50 Ib m / cu ft, and two pressures fixed p1 = 50, p3 = 0 psi. Results of simulation Figure-8 show that, although the method is computationally straight forward, it needs many iterations to give a reasonable degree of convergence. In addition, referring to equation (7), we can see that a starting guess of p i = p j for any two nodes that are directly connected would be unfortunate. We also note that most of the pressure drop occurs in the pipe 2-3, and that the flow in the branch is appreciably greater than that in the pipe 1-2, even though the latter is much shorter Figure-8. Both these observations can be reconciled by noting that pressure drop is proportional to Q 2 / D 5, and that pipe 2-3 must take the combined flows along and Conclusions The difficulty of using successive substitution method in solving a non-linear equations depend on the nature of the problem, there is no general recognized best method of solution. In our simulation, the method proved to be a powerful method for solution if the approximate locations of the root is known. The success of the method depends on arranging matters so that large errors in an unknown tend to produce smaller ones in the next cycle of iteration. Thus, the successive substitution method is more suitable only when the situations carefully analyzed and details should be easily worked out for any particular situation. The method can be extended to more complex situations, in which we could allow for (a) f m being a function of Reynolds number and pipe roughness, instead of being treated as a constant, and (b) pumps and valves in some of the branches, etc. In addition, the logical arrays used above could find a similar application in solving for the currents in a network of resistors, with known voltages applied at some of the nodes (although this would lead to a set of simultaneous linear equations). References [1] Flow in Pipes. Cen72367-ch08.qxd, Page 321. [2] Bader. E.A.: An Introduction to Mathematical Modeling. N.Y. Dover. ISBN X [3] Anthony Ralston: A first Course in Numerical Analysis. Dover Publication INC, 2001 (Second Edition). [4] J. D. Faris, R. Burden: Numerical Methods. 4 th Edition, ISBN [5] A. Kaw: Newton-Raphson Method of Solving Nonlinear Equation. Text Book, December www. numericalmethods.eng.usf.edu. [6] A. Kaw: Bisection Method of Solving Nonlinear Equation. Text Book, January www. numericalmethods.eng.usf.edu. [7] D. Nguyen: FALSE-Position Method of Solving Nonlinear Equation. Text Book, September www. numericalmethods.eng.usf.edu. [8] A. Kaw: Secant Method of Solving Nonlinear Equation. Text Book, December www. numericalmethods.eng.usf.edu. [9] Al-Rawi: Finding the flow of fluid in pipes Network. Al-Mansour University College Baghdad-Iraq, May [10] Mathews: Module for Fixed Point Iteration. California State University Fullerton. Mathfaculity.fullerton.edu/Mathews/n2003/fixedpointmod.html. [11] Brice C., H.A. Luther: Applied Numerical Methods. Krieger Publishing Company, Malabar, Florida,
6 Figure-5 12
7 INITIAL INFORMATION ABOUT NETWORK TOTAL NUMBER OF NODES=5 THE NUMBER OF ITIRATIONS=100 DENSITY OF THE LIQUID= TOLARANCE= MOODY FRICTION FACTOR= PRESS ANY KEY TO CONTINUE... Figure-6 Figure-7 13


8 Computer output (continued) 14

9 Figure-8 15
Chapter 3: Root Finding. September 26, 2005
 Chapter 3: Root Finding September 26, 2005 Outline 1 Root Finding 2 3.1 The Bisection Method 3 3.2 Newton s Method: Derivation and Examples 4 3.3 How To Stop Newton s Method 5 3.4 Application: Division
Chapter 3: Root Finding September 26, 2005 Outline 1 Root Finding 2 3.1 The Bisection Method 3 3.2 Newton s Method: Derivation and Examples 4 3.3 How To Stop Newton s Method 5 3.4 Application: Division
Chapter 1. Root Finding Methods. 1.1 Bisection method
 Chapter 1 Root Finding Methods We begin by considering numerical solutions to the problem f(x) = 0 (1.1) Although the problem above is simple to state it is not always easy to solve analytically. This
Chapter 1 Root Finding Methods We begin by considering numerical solutions to the problem f(x) = 0 (1.1) Although the problem above is simple to state it is not always easy to solve analytically. This
Scientific Computing. Roots of Equations
 ECE257 Numerical Methods and Scientific Computing Roots of Equations Today s s class: Roots of Equations Polynomials Polynomials A polynomial is of the form: ( x) = a 0 + a 1 x + a 2 x 2 +L+ a n x n f
ECE257 Numerical Methods and Scientific Computing Roots of Equations Today s s class: Roots of Equations Polynomials Polynomials A polynomial is of the form: ( x) = a 0 + a 1 x + a 2 x 2 +L+ a n x n f
Queens College, CUNY, Department of Computer Science Numerical Methods CSCI 361 / 761 Spring 2018 Instructor: Dr. Sateesh Mane.
 Queens College, CUNY, Department of Computer Science Numerical Methods CSCI 361 / 761 Spring 2018 Instructor: Dr. Sateesh Mane c Sateesh R. Mane 2018 3 Lecture 3 3.1 General remarks March 4, 2018 This
Queens College, CUNY, Department of Computer Science Numerical Methods CSCI 361 / 761 Spring 2018 Instructor: Dr. Sateesh Mane c Sateesh R. Mane 2018 3 Lecture 3 3.1 General remarks March 4, 2018 This
Exact and Approximate Numbers:
 Eact and Approimate Numbers: The numbers that arise in technical applications are better described as eact numbers because there is not the sort of uncertainty in their values that was described above.
Eact and Approimate Numbers: The numbers that arise in technical applications are better described as eact numbers because there is not the sort of uncertainty in their values that was described above.
SOLUTION OF ALGEBRAIC AND TRANSCENDENTAL EQUATIONS BISECTION METHOD
 BISECTION METHOD If a function f(x) is continuous between a and b, and f(a) and f(b) are of opposite signs, then there exists at least one root between a and b. It is shown graphically as, Let f a be negative
BISECTION METHOD If a function f(x) is continuous between a and b, and f(a) and f(b) are of opposite signs, then there exists at least one root between a and b. It is shown graphically as, Let f a be negative
p 1 p 0 (p 1, f(p 1 )) (p 0, f(p 0 )) The geometric construction of p 2 for the se- cant method.
) (p 0, f(p 0 )) The geometric construction of p 2 for the se- cant method.") 80 CHAP. 2 SOLUTION OF NONLINEAR EQUATIONS f (x) = 0 y y = f(x) (p, 0) p 2 p 1 p 0 x (p 1, f(p 1 )) (p 0, f(p 0 )) The geometric construction of p 2 for the se- Figure 2.16 cant method. Secant Method The
80 CHAP. 2 SOLUTION OF NONLINEAR EQUATIONS f (x) = 0 y y = f(x) (p, 0) p 2 p 1 p 0 x (p 1, f(p 1 )) (p 0, f(p 0 )) The geometric construction of p 2 for the se- Figure 2.16 cant method. Secant Method The
Numerical Methods Lecture 3
 Numerical Methods Lecture 3 Nonlinear Equations by Pavel Ludvík Introduction Definition (Root or zero of a function) A root (or a zero) of a function f is a solution of an equation f (x) = 0. We learn
Numerical Methods Lecture 3 Nonlinear Equations by Pavel Ludvík Introduction Definition (Root or zero of a function) A root (or a zero) of a function f is a solution of an equation f (x) = 0. We learn
PART I Lecture Notes on Numerical Solution of Root Finding Problems MATH 435
 PART I Lecture Notes on Numerical Solution of Root Finding Problems MATH 435 Professor Biswa Nath Datta Department of Mathematical Sciences Northern Illinois University DeKalb, IL. 60115 USA E mail: dattab@math.niu.edu
PART I Lecture Notes on Numerical Solution of Root Finding Problems MATH 435 Professor Biswa Nath Datta Department of Mathematical Sciences Northern Illinois University DeKalb, IL. 60115 USA E mail: dattab@math.niu.edu
Numerical Methods Dr. Sanjeev Kumar Department of Mathematics Indian Institute of Technology Roorkee Lecture No 7 Regula Falsi and Secant Methods
 Numerical Methods Dr. Sanjeev Kumar Department of Mathematics Indian Institute of Technology Roorkee Lecture No 7 Regula Falsi and Secant Methods So welcome to the next lecture of the 2 nd unit of this
Numerical Methods Dr. Sanjeev Kumar Department of Mathematics Indian Institute of Technology Roorkee Lecture No 7 Regula Falsi and Secant Methods So welcome to the next lecture of the 2 nd unit of this
Numerical Methods. Root Finding
 Numerical Methods Solving Non Linear 1-Dimensional Equations Root Finding Given a real valued function f of one variable (say ), the idea is to find an such that: f() 0 1 Root Finding Eamples Find real
Numerical Methods Solving Non Linear 1-Dimensional Equations Root Finding Given a real valued function f of one variable (say ), the idea is to find an such that: f() 0 1 Root Finding Eamples Find real
Solution of Nonlinear Equations
 Solution of Nonlinear Equations (Com S 477/577 Notes) Yan-Bin Jia Sep 14, 017 One of the most frequently occurring problems in scientific work is to find the roots of equations of the form f(x) = 0. (1)
Solution of Nonlinear Equations (Com S 477/577 Notes) Yan-Bin Jia Sep 14, 017 One of the most frequently occurring problems in scientific work is to find the roots of equations of the form f(x) = 0. (1)
2.29 Numerical Fluid Mechanics Spring 2015 Lecture 4
 2.29 Spring 2015 Lecture 4 Review Lecture 3 Truncation Errors, Taylor Series and Error Analysis Taylor series: 2 3 n n i1 i i i i i n f( ) f( ) f '( ) f ''( ) f '''( )... f ( ) R 2! 3! n! n1 ( n1) Rn f
2.29 Spring 2015 Lecture 4 Review Lecture 3 Truncation Errors, Taylor Series and Error Analysis Taylor series: 2 3 n n i1 i i i i i n f( ) f( ) f '( ) f ''( ) f '''( )... f ( ) R 2! 3! n! n1 ( n1) Rn f
Fluid Flow Analysis Penn State Chemical Engineering
 Fluid Flow Analysis Penn State Chemical Engineering Revised Spring 2015 Table of Contents LEARNING OBJECTIVES... 1 EXPERIMENTAL OBJECTIVES AND OVERVIEW... 1 PRE-LAB STUDY... 2 EXPERIMENTS IN THE LAB...
Fluid Flow Analysis Penn State Chemical Engineering Revised Spring 2015 Table of Contents LEARNING OBJECTIVES... 1 EXPERIMENTAL OBJECTIVES AND OVERVIEW... 1 PRE-LAB STUDY... 2 EXPERIMENTS IN THE LAB...
Fluids Engineering. Pipeline Systems 2. Course teacher Dr. M. Mahbubur Razzaque Professor Department of Mechanical Engineering BUET
 COURSE NUMBER: ME 423 Fluids Engineering Pipeline Systems 2 Course teacher Dr. M. Mahbubur Razzaque Professor Department of Mechanical Engineering BUET 1 SERIES PIPE FLOW WITH PUMP(S) 2 3 4 Colebrook-
COURSE NUMBER: ME 423 Fluids Engineering Pipeline Systems 2 Course teacher Dr. M. Mahbubur Razzaque Professor Department of Mechanical Engineering BUET 1 SERIES PIPE FLOW WITH PUMP(S) 2 3 4 Colebrook-
Hydraulics Prof Dr Arup Kumar Sarma Department of Civil Engineering Indian Institute of Technology, Guwahati
 Hydraulics Prof Dr Arup Kumar Sarma Department of Civil Engineering Indian Institute of Technology, Guwahati Module No # 08 Pipe Flow Lecture No # 04 Pipe Network Analysis Friends, today we will be starting
Hydraulics Prof Dr Arup Kumar Sarma Department of Civil Engineering Indian Institute of Technology, Guwahati Module No # 08 Pipe Flow Lecture No # 04 Pipe Network Analysis Friends, today we will be starting
CHAPTER-II ROOTS OF EQUATIONS
 CHAPTER-II ROOTS OF EQUATIONS 2.1 Introduction The roots or zeros of equations can be simply defined as the values of x that makes f(x) =0. There are many ways to solve for roots of equations. For some
CHAPTER-II ROOTS OF EQUATIONS 2.1 Introduction The roots or zeros of equations can be simply defined as the values of x that makes f(x) =0. There are many ways to solve for roots of equations. For some
Today s class. Numerical differentiation Roots of equation Bracketing methods. Numerical Methods, Fall 2011 Lecture 4. Prof. Jinbo Bi CSE, UConn
 Today s class Numerical differentiation Roots of equation Bracketing methods 1 Numerical Differentiation Finite divided difference First forward difference First backward difference Lecture 3 2 Numerical
Today s class Numerical differentiation Roots of equation Bracketing methods 1 Numerical Differentiation Finite divided difference First forward difference First backward difference Lecture 3 2 Numerical
CHAPTER 4 ROOTS OF EQUATIONS
 CHAPTER 4 ROOTS OF EQUATIONS Chapter 3 : TOPIC COVERS (ROOTS OF EQUATIONS) Definition of Root of Equations Bracketing Method Graphical Method Bisection Method False Position Method Open Method One-Point
CHAPTER 4 ROOTS OF EQUATIONS Chapter 3 : TOPIC COVERS (ROOTS OF EQUATIONS) Definition of Root of Equations Bracketing Method Graphical Method Bisection Method False Position Method Open Method One-Point
Computational Methods CMSC/AMSC/MAPL 460. Solving nonlinear equations and zero finding. Finding zeroes of functions
 Computational Methods CMSC/AMSC/MAPL 460 Solving nonlinear equations and zero finding Ramani Duraiswami, Dept. of Computer Science Where does it arise? Finding zeroes of functions Solving functional equations
Computational Methods CMSC/AMSC/MAPL 460 Solving nonlinear equations and zero finding Ramani Duraiswami, Dept. of Computer Science Where does it arise? Finding zeroes of functions Solving functional equations
GENG2140, S2, 2012 Week 7: Curve fitting
 GENG2140, S2, 2012 Week 7: Curve fitting Curve fitting is the process of constructing a curve, or mathematical function, f(x) that has the best fit to a series of data points Involves fitting lines and
GENG2140, S2, 2012 Week 7: Curve fitting Curve fitting is the process of constructing a curve, or mathematical function, f(x) that has the best fit to a series of data points Involves fitting lines and
COURSE Iterative methods for solving linear systems
 COURSE 0 4.3. Iterative methods for solving linear systems Because of round-off errors, direct methods become less efficient than iterative methods for large systems (>00 000 variables). An iterative scheme
COURSE 0 4.3. Iterative methods for solving linear systems Because of round-off errors, direct methods become less efficient than iterative methods for large systems (>00 000 variables). An iterative scheme
Bisection and False Position Dr. Marco A. Arocha Aug, 2014
 Bisection and False Position Dr. Marco A. Arocha Aug, 2014 1 Given function f, we seek x values for which f(x)=0 Solution x is the root of the equation or zero of the function f Problem is known as root
Bisection and False Position Dr. Marco A. Arocha Aug, 2014 1 Given function f, we seek x values for which f(x)=0 Solution x is the root of the equation or zero of the function f Problem is known as root
ECE133A Applied Numerical Computing Additional Lecture Notes
 Winter Quarter 2018 ECE133A Applied Numerical Computing Additional Lecture Notes L. Vandenberghe ii Contents 1 LU factorization 1 1.1 Definition................................. 1 1.2 Nonsingular sets
Winter Quarter 2018 ECE133A Applied Numerical Computing Additional Lecture Notes L. Vandenberghe ii Contents 1 LU factorization 1 1.1 Definition................................. 1 1.2 Nonsingular sets
Calculus concepts and applications
 Calculus concepts and applications This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/,
Calculus concepts and applications This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/,
cha1873x_p02.qxd 3/21/05 1:01 PM Page 104 PART TWO
 cha1873x_p02.qxd 3/21/05 1:01 PM Page 104 PART TWO ROOTS OF EQUATIONS PT2.1 MOTIVATION Years ago, you learned to use the quadratic formula x = b ± b 2 4ac 2a to solve f(x) = ax 2 + bx + c = 0 (PT2.1) (PT2.2)
cha1873x_p02.qxd 3/21/05 1:01 PM Page 104 PART TWO ROOTS OF EQUATIONS PT2.1 MOTIVATION Years ago, you learned to use the quadratic formula x = b ± b 2 4ac 2a to solve f(x) = ax 2 + bx + c = 0 (PT2.1) (PT2.2)
Computational Methods. Solving Equations
 Computational Methods Solving Equations Manfred Huber 2010 1 Solving Equations Solving scalar equations is an elemental task that arises in a wide range of applications Corresponds to finding parameters
Computational Methods Solving Equations Manfred Huber 2010 1 Solving Equations Solving scalar equations is an elemental task that arises in a wide range of applications Corresponds to finding parameters
SECTION 1 - WHAT IS A BTU METER? BTU's = Flow x ΔT Any ISTEC BTU Meter System consists of the following main components:
 SECTION 1 - WHAT IS A BTU METER? ISTEC BTU Meters measure energy usage by multiplying flow rate and temperature difference. As the water (or other liquid) passes through these lines, the multi-wing turbine
SECTION 1 - WHAT IS A BTU METER? ISTEC BTU Meters measure energy usage by multiplying flow rate and temperature difference. As the water (or other liquid) passes through these lines, the multi-wing turbine
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation
Lecture Notes to Accompany. Scientific Computing An Introductory Survey. by Michael T. Heath. Chapter 5. Nonlinear Equations
 Lecture Notes to Accompany Scientific Computing An Introductory Survey Second Edition by Michael T Heath Chapter 5 Nonlinear Equations Copyright c 2001 Reproduction permitted only for noncommercial, educational
Lecture Notes to Accompany Scientific Computing An Introductory Survey Second Edition by Michael T Heath Chapter 5 Nonlinear Equations Copyright c 2001 Reproduction permitted only for noncommercial, educational
Enhancing Computer-Based Problem Solving Skills with a Combination of Software Packages
 3420 Enhancing Computer-Based Problem Solving Sills with a Combination of Software Pacages Mordechai Shacham Dept. of Chemical Engineering, Ben Gurion University of the Negev Beer-Sheva 84105, Israel e-mail:
3420 Enhancing Computer-Based Problem Solving Sills with a Combination of Software Pacages Mordechai Shacham Dept. of Chemical Engineering, Ben Gurion University of the Negev Beer-Sheva 84105, Israel e-mail:
Applied Fluid Mechanics
 Applied Fluid Mechanics 1. The Nature of Fluid and the Study of Fluid Mechanics 2. Viscosity of Fluid 3. Pressure Measurement 4. Forces Due to Static Fluid 5. Buoyancy and Stability 6. Flow of Fluid and
Applied Fluid Mechanics 1. The Nature of Fluid and the Study of Fluid Mechanics 2. Viscosity of Fluid 3. Pressure Measurement 4. Forces Due to Static Fluid 5. Buoyancy and Stability 6. Flow of Fluid and
1. Method 1: bisection. The bisection methods starts from two points a 0 and b 0 such that
 Chapter 4 Nonlinear equations 4.1 Root finding Consider the problem of solving any nonlinear relation g(x) = h(x) in the real variable x. We rephrase this problem as one of finding the zero (root) of a
Chapter 4 Nonlinear equations 4.1 Root finding Consider the problem of solving any nonlinear relation g(x) = h(x) in the real variable x. We rephrase this problem as one of finding the zero (root) of a
Chemical Engineering 374
 Chemical Engineering 374 Fluid Mechanics Single Pipelines 1 Fluids Roadmap Where are we going? 3 Imagine you just started a new job You are a process engineer at a plant Your boss comes to you and says:
Chemical Engineering 374 Fluid Mechanics Single Pipelines 1 Fluids Roadmap Where are we going? 3 Imagine you just started a new job You are a process engineer at a plant Your boss comes to you and says:
3.1 Introduction. Solve non-linear real equation f(x) = 0 for real root or zero x. E.g. x x 1.5 =0, tan x x =0.
 = 0 for real root or zero x. E.g. x x 1.5 =0, tan x x =0.") 3.1 Introduction Solve non-linear real equation f(x) = 0 for real root or zero x. E.g. x 3 +1.5x 1.5 =0, tan x x =0. Practical existence test for roots: by intermediate value theorem, f C[a, b] & f(a)f(b)
3.1 Introduction Solve non-linear real equation f(x) = 0 for real root or zero x. E.g. x 3 +1.5x 1.5 =0, tan x x =0. Practical existence test for roots: by intermediate value theorem, f C[a, b] & f(a)f(b)
Guidelines for the Installation of SYGEF Pipes, Fittings and Valves
 Guidelines for the Installation of SYGEF Pipes, Fittings and Valves Calculation of Length Changes Length changes which occur in SYGEF can be calculated in the usual manner, taking into consideration the
Guidelines for the Installation of SYGEF Pipes, Fittings and Valves Calculation of Length Changes Length changes which occur in SYGEF can be calculated in the usual manner, taking into consideration the
CLASS NOTES Models, Algorithms and Data: Introduction to computing 2018
 CLASS NOTES Models, Algorithms and Data: Introduction to computing 2018 Petros Koumoutsakos, Jens Honore Walther (Last update: April 16, 2018) IMPORTANT DISCLAIMERS 1. REFERENCES: Much of the material
CLASS NOTES Models, Algorithms and Data: Introduction to computing 2018 Petros Koumoutsakos, Jens Honore Walther (Last update: April 16, 2018) IMPORTANT DISCLAIMERS 1. REFERENCES: Much of the material
Department of Energy Fundamentals Handbook. THERMODYNAMICS, HEAT TRANSFER, AND FLUID FLOW, Module 3 Fluid Flow
 Department of Energy Fundamentals Handbook THERMODYNAMICS, HEAT TRANSFER, AND FLUID FLOW, Module 3 REFERENCES REFERENCES Streeter, Victor L., Fluid Mechanics, 5th Edition, McGraw-Hill, New York, ISBN 07-062191-9.
Department of Energy Fundamentals Handbook THERMODYNAMICS, HEAT TRANSFER, AND FLUID FLOW, Module 3 REFERENCES REFERENCES Streeter, Victor L., Fluid Mechanics, 5th Edition, McGraw-Hill, New York, ISBN 07-062191-9.
Numerical Methods. Roots of Equations
 Roots of Equations by Norhayati Rosli & Nadirah Mohd Nasir Faculty of Industrial Sciences & Technology norhayati@ump.edu.my, nadirah@ump.edu.my Description AIMS This chapter is aimed to compute the root(s)
Roots of Equations by Norhayati Rosli & Nadirah Mohd Nasir Faculty of Industrial Sciences & Technology norhayati@ump.edu.my, nadirah@ump.edu.my Description AIMS This chapter is aimed to compute the root(s)
Non Newtonian Fluid Dynamics
 PDHonline Course M417 (3 PDH) Non Newtonian Fluid Dynamics Instructor: Paul G. Conley, PE 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org
PDHonline Course M417 (3 PDH) Non Newtonian Fluid Dynamics Instructor: Paul G. Conley, PE 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org
Chapter 2 Solutions of Equations of One Variable
 Chapter 2 Solutions of Equations of One Variable 2.1 Bisection Method In this chapter we consider one of the most basic problems of numerical approximation, the root-finding problem. This process involves
Chapter 2 Solutions of Equations of One Variable 2.1 Bisection Method In this chapter we consider one of the most basic problems of numerical approximation, the root-finding problem. This process involves
Pipe Flow/Friction Factor Calculations using Excel Spreadsheets
 Pipe Flow/Friction Factor Calculations using Excel Spreadsheets Harlan H. Bengtson, PE, PhD Emeritus Professor of Civil Engineering Southern Illinois University Edwardsville Table of Contents Introduction
Pipe Flow/Friction Factor Calculations using Excel Spreadsheets Harlan H. Bengtson, PE, PhD Emeritus Professor of Civil Engineering Southern Illinois University Edwardsville Table of Contents Introduction
Numerical mathematics with GeoGebra in high school
 Herceg 2009/2/18 23:36 page 363 #1 6/2 (2008), 363 378 tmcs@inf.unideb.hu http://tmcs.math.klte.hu Numerical mathematics with GeoGebra in high school Dragoslav Herceg and Ðorđe Herceg Abstract. We have
Herceg 2009/2/18 23:36 page 363 #1 6/2 (2008), 363 378 tmcs@inf.unideb.hu http://tmcs.math.klte.hu Numerical mathematics with GeoGebra in high school Dragoslav Herceg and Ðorđe Herceg Abstract. We have
Root Finding: Close Methods. Bisection and False Position Dr. Marco A. Arocha Aug, 2014
 Root Finding: Close Methods Bisection and False Position Dr. Marco A. Arocha Aug, 2014 1 Roots Given function f(x), we seek x values for which f(x)=0 Solution x is the root of the equation or zero of the
Root Finding: Close Methods Bisection and False Position Dr. Marco A. Arocha Aug, 2014 1 Roots Given function f(x), we seek x values for which f(x)=0 Solution x is the root of the equation or zero of the
Lecture 7: Numerical Tools
 Lecture 7: Numerical Tools Fatih Guvenen January 10, 2016 Fatih Guvenen Lecture 7: Numerical Tools January 10, 2016 1 / 18 Overview Three Steps: V (k, z) =max c,k 0 apple u(c)+ Z c + k 0 =(1 + r)k + z
Lecture 7: Numerical Tools Fatih Guvenen January 10, 2016 Fatih Guvenen Lecture 7: Numerical Tools January 10, 2016 1 / 18 Overview Three Steps: V (k, z) =max c,k 0 apple u(c)+ Z c + k 0 =(1 + r)k + z
Solution of Algebric & Transcendental Equations
 Page15 Solution of Algebric & Transcendental Equations Contents: o Introduction o Evaluation of Polynomials by Horner s Method o Methods of solving non linear equations o Bracketing Methods o Bisection
Page15 Solution of Algebric & Transcendental Equations Contents: o Introduction o Evaluation of Polynomials by Horner s Method o Methods of solving non linear equations o Bracketing Methods o Bisection
Principles of Convection
 Principles of Convection Point Conduction & convection are similar both require the presence of a material medium. But convection requires the presence of fluid motion. Heat transfer through the: Solid
Principles of Convection Point Conduction & convection are similar both require the presence of a material medium. But convection requires the presence of fluid motion. Heat transfer through the: Solid
Chapter 3: The Derivative in Graphing and Applications
 Chapter 3: The Derivative in Graphing and Applications Summary: The main purpose of this chapter is to use the derivative as a tool to assist in the graphing of functions and for solving optimization problems.
Chapter 3: The Derivative in Graphing and Applications Summary: The main purpose of this chapter is to use the derivative as a tool to assist in the graphing of functions and for solving optimization problems.
Bernoulli and Pipe Flow
 Civil Engineering Hydraulics Mechanics of Fluids Head Loss Calculations Bernoulli and The Bernoulli equation that we worked with was a bit simplistic in the way it looked at a fluid system All real systems
Civil Engineering Hydraulics Mechanics of Fluids Head Loss Calculations Bernoulli and The Bernoulli equation that we worked with was a bit simplistic in the way it looked at a fluid system All real systems
ACCOUNTING FOR FRICTION IN THE BERNOULLI EQUATION FOR FLOW THROUGH PIPES
 ACCOUNTING FOR FRICTION IN THE BERNOULLI EQUATION FOR FLOW THROUGH PIPES Some background information first: We have seen that a major limitation of the Bernoulli equation is that it does not account for
ACCOUNTING FOR FRICTION IN THE BERNOULLI EQUATION FOR FLOW THROUGH PIPES Some background information first: We have seen that a major limitation of the Bernoulli equation is that it does not account for
Using Derivatives To Measure Rates of Change
 Using Derivatives To Measure Rates of Change A rate of change is associated with a variable f(x) that changes by the same amount when the independent variable x increases by one unit. Here are two examples:
Using Derivatives To Measure Rates of Change A rate of change is associated with a variable f(x) that changes by the same amount when the independent variable x increases by one unit. Here are two examples:
Lecture 8. Root finding II
 1 Introduction Lecture 8 Root finding II In the previous lecture we considered the bisection root-bracketing algorithm. It requires only that the function be continuous and that we have a root bracketed
1 Introduction Lecture 8 Root finding II In the previous lecture we considered the bisection root-bracketing algorithm. It requires only that the function be continuous and that we have a root bracketed
Figure 1: Graph of y = x cos(x)
") Chapter The Solution of Nonlinear Equations f(x) = 0 In this chapter we will study methods for find the solutions of functions of single variables, ie values of x such that f(x) = 0 For example, f(x) =
Chapter The Solution of Nonlinear Equations f(x) = 0 In this chapter we will study methods for find the solutions of functions of single variables, ie values of x such that f(x) = 0 For example, f(x) =
Numerical Analysis Fall. Roots: Open Methods
 Numerical Analysis 2015 Fall Roots: Open Methods Open Methods Open methods differ from bracketing methods, in that they require only a single starting value or two starting values that do not necessarily
Numerical Analysis 2015 Fall Roots: Open Methods Open Methods Open methods differ from bracketing methods, in that they require only a single starting value or two starting values that do not necessarily
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 5 Nonlinear Equations Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction
Scientific Computing: An Introductory Survey Chapter 5 Nonlinear Equations Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction
1 Basic Combinatorics
 1 Basic Combinatorics 1.1 Sets and sequences Sets. A set is an unordered collection of distinct objects. The objects are called elements of the set. We use braces to denote a set, for example, the set
1 Basic Combinatorics 1.1 Sets and sequences Sets. A set is an unordered collection of distinct objects. The objects are called elements of the set. We use braces to denote a set, for example, the set
Frictional Losses in Straight Pipe
 2/2/206 CM325 Fundamentals of Chemical Engineering Laboratory Prelab Preparation for Frictional Losses in Straight Pipe Professor Faith Morrison Department of Chemical Engineering Michigan Technological
2/2/206 CM325 Fundamentals of Chemical Engineering Laboratory Prelab Preparation for Frictional Losses in Straight Pipe Professor Faith Morrison Department of Chemical Engineering Michigan Technological
Notes for course EE1.1 Circuit Analysis TOPIC 4 NODAL ANALYSIS
 Notes for course EE1.1 Circuit Analysis 2004-05 TOPIC 4 NODAL ANALYSIS OBJECTIVES 1) To develop Nodal Analysis of Circuits without Voltage Sources 2) To develop Nodal Analysis of Circuits with Voltage
Notes for course EE1.1 Circuit Analysis 2004-05 TOPIC 4 NODAL ANALYSIS OBJECTIVES 1) To develop Nodal Analysis of Circuits without Voltage Sources 2) To develop Nodal Analysis of Circuits with Voltage
Line Search Methods. Shefali Kulkarni-Thaker
 1 BISECTION METHOD Line Search Methods Shefali Kulkarni-Thaker Consider the following unconstrained optimization problem min f(x) x R Any optimization algorithm starts by an initial point x 0 and performs
1 BISECTION METHOD Line Search Methods Shefali Kulkarni-Thaker Consider the following unconstrained optimization problem min f(x) x R Any optimization algorithm starts by an initial point x 0 and performs
Scientific Computing. Roots of Equations
 ECE257 Numerical Methods and Scientific Computing Roots of Equations Today s s class: Roots of Equations Bracketing Methods Roots of Equations Given a function f(x), the roots are those values of x that
ECE257 Numerical Methods and Scientific Computing Roots of Equations Today s s class: Roots of Equations Bracketing Methods Roots of Equations Given a function f(x), the roots are those values of x that
We are going to discuss what it means for a sequence to converge in three stages: First, we define what it means for a sequence to converge to zero
 Chapter Limits of Sequences Calculus Student: lim s n = 0 means the s n are getting closer and closer to zero but never gets there. Instructor: ARGHHHHH! Exercise. Think of a better response for the instructor.
Chapter Limits of Sequences Calculus Student: lim s n = 0 means the s n are getting closer and closer to zero but never gets there. Instructor: ARGHHHHH! Exercise. Think of a better response for the instructor.
Solving Linear Systems
 Solving Linear Systems Iterative Solutions Methods Philippe B. Laval KSU Fall 207 Philippe B. Laval (KSU) Linear Systems Fall 207 / 2 Introduction We continue looking how to solve linear systems of the
Solving Linear Systems Iterative Solutions Methods Philippe B. Laval KSU Fall 207 Philippe B. Laval (KSU) Linear Systems Fall 207 / 2 Introduction We continue looking how to solve linear systems of the
Numerical Solution of f(x) = 0
 = 0") Numerical Solution of f(x) = 0 Gerald W. Recktenwald Department of Mechanical Engineering Portland State University gerry@pdx.edu ME 350: Finding roots of f(x) = 0 Overview Topics covered in these slides
Numerical Solution of f(x) = 0 Gerald W. Recktenwald Department of Mechanical Engineering Portland State University gerry@pdx.edu ME 350: Finding roots of f(x) = 0 Overview Topics covered in these slides
Solving Non-Linear Equations (Root Finding)
") Solving Non-Linear Equations (Root Finding) Root finding Methods What are root finding methods? Methods for determining a solution of an equation. Essentially finding a root of a function, that is, a zero
Solving Non-Linear Equations (Root Finding) Root finding Methods What are root finding methods? Methods for determining a solution of an equation. Essentially finding a root of a function, that is, a zero
Applied Fluid Mechanics
 Applied Fluid Mechanics 1. The Nature of Fluid and the Study of Fluid Mechanics 2. Viscosity of Fluid 3. Pressure Measurement 4. Forces Due to Static Fluid 5. Buoyancy and Stability 6. Flow of Fluid and
Applied Fluid Mechanics 1. The Nature of Fluid and the Study of Fluid Mechanics 2. Viscosity of Fluid 3. Pressure Measurement 4. Forces Due to Static Fluid 5. Buoyancy and Stability 6. Flow of Fluid and
CS 450 Numerical Analysis. Chapter 5: Nonlinear Equations
 Lecture slides based on the textbook Scientific Computing: An Introductory Survey by Michael T. Heath, copyright c 2018 by the Society for Industrial and Applied Mathematics. http://www.siam.org/books/cl80
Lecture slides based on the textbook Scientific Computing: An Introductory Survey by Michael T. Heath, copyright c 2018 by the Society for Industrial and Applied Mathematics. http://www.siam.org/books/cl80
Hydraulics Prof. Dr. Arup Kumar Sarma Department of Civil Engineering Indian Institute of Technology, Guwahati
 Hydraulics Prof. Dr. Arup Kumar Sarma Department of Civil Engineering Indian Institute of Technology, Guwahati Module No. # 08 Pipe Flow Lecture No. # 05 Water Hammer and Surge Tank Energy cannot be consumed
Hydraulics Prof. Dr. Arup Kumar Sarma Department of Civil Engineering Indian Institute of Technology, Guwahati Module No. # 08 Pipe Flow Lecture No. # 05 Water Hammer and Surge Tank Energy cannot be consumed
ROOT FINDING REVIEW MICHELLE FENG
 ROOT FINDING REVIEW MICHELLE FENG 1.1. Bisection Method. 1. Root Finding Methods (1) Very naive approach based on the Intermediate Value Theorem (2) You need to be looking in an interval with only one
ROOT FINDING REVIEW MICHELLE FENG 1.1. Bisection Method. 1. Root Finding Methods (1) Very naive approach based on the Intermediate Value Theorem (2) You need to be looking in an interval with only one
A three point formula for finding roots of equations by the method of least squares
 Journal of Applied Mathematics and Bioinformatics, vol.2, no. 3, 2012, 213-233 ISSN: 1792-6602(print), 1792-6939(online) Scienpress Ltd, 2012 A three point formula for finding roots of equations by the
Journal of Applied Mathematics and Bioinformatics, vol.2, no. 3, 2012, 213-233 ISSN: 1792-6602(print), 1792-6939(online) Scienpress Ltd, 2012 A three point formula for finding roots of equations by the
Outline. Scientific Computing: An Introductory Survey. Nonlinear Equations. Nonlinear Equations. Examples: Nonlinear Equations
 Methods for Systems of Methods for Systems of Outline Scientific Computing: An Introductory Survey Chapter 5 1 Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign
Methods for Systems of Methods for Systems of Outline Scientific Computing: An Introductory Survey Chapter 5 1 Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign
MAE 107 Homework 8 Solutions
 MAE 107 Homework 8 Solutions 1. Newton s method to solve 3exp( x) = 2x starting at x 0 = 11. With chosen f(x), indicate x n, f(x n ), and f (x n ) at each step stopping at the first n such that f(x n )
MAE 107 Homework 8 Solutions 1. Newton s method to solve 3exp( x) = 2x starting at x 0 = 11. With chosen f(x), indicate x n, f(x n ), and f (x n ) at each step stopping at the first n such that f(x n )
Learning Objectives. Lesson 6: Mathematical Models of Fluid Flow Components. ET 438a Automatic Control Systems Technology 8/27/2015
 Lesson 6: Mathematical Models of Fluid Flow Components ET 438a Automatic Control Systems Technology lesson6et438a.pptx 1 Learning Objectives After this presentation you will be able to: Define the characteristics
Lesson 6: Mathematical Models of Fluid Flow Components ET 438a Automatic Control Systems Technology lesson6et438a.pptx 1 Learning Objectives After this presentation you will be able to: Define the characteristics
SECTION 5: POWER FLOW. ESE 470 Energy Distribution Systems
 SECTION 5: POWER FLOW ESE 470 Energy Distribution Systems 2 Introduction Nodal Analysis 3 Consider the following circuit Three voltage sources VV sss, VV sss, VV sss Generic branch impedances Could be
SECTION 5: POWER FLOW ESE 470 Energy Distribution Systems 2 Introduction Nodal Analysis 3 Consider the following circuit Three voltage sources VV sss, VV sss, VV sss Generic branch impedances Could be
Chapter 6. Nonlinear Equations. 6.1 The Problem of Nonlinear Root-finding. 6.2 Rate of Convergence
 Chapter 6 Nonlinear Equations 6. The Problem of Nonlinear Root-finding In this module we consider the problem of using numerical techniques to find the roots of nonlinear equations, f () =. Initially we
Chapter 6 Nonlinear Equations 6. The Problem of Nonlinear Root-finding In this module we consider the problem of using numerical techniques to find the roots of nonlinear equations, f () =. Initially we
English 4 th Grade A-L Vocabulary Cards and Word Walls Revised: 2/10/14
 English 4 th Grade A-L Vocabulary Cards and Word Walls Revised: 2/10/14 Important Notes for Teachers: The vocabulary cards in this file match the Common Core, the math curriculum adopted by the Utah State
English 4 th Grade A-L Vocabulary Cards and Word Walls Revised: 2/10/14 Important Notes for Teachers: The vocabulary cards in this file match the Common Core, the math curriculum adopted by the Utah State
Nonlinear Equations. Not guaranteed to have any real solutions, but generally do for astrophysical problems.
 Nonlinear Equations Often (most of the time??) the relevant system of equations is not linear in the unknowns. Then, cannot decompose as Ax = b. Oh well. Instead write as: (1) f(x) = 0 function of one
Nonlinear Equations Often (most of the time??) the relevant system of equations is not linear in the unknowns. Then, cannot decompose as Ax = b. Oh well. Instead write as: (1) f(x) = 0 function of one
NUMERICAL AND STATISTICAL COMPUTING (MCA-202-CR)
") NUMERICAL AND STATISTICAL COMPUTING (MCA-202-CR) Autumn Session UNIT 1 Numerical analysis is the study of algorithms that uses, creates and implements algorithms for obtaining numerical solutions to problems
NUMERICAL AND STATISTICAL COMPUTING (MCA-202-CR) Autumn Session UNIT 1 Numerical analysis is the study of algorithms that uses, creates and implements algorithms for obtaining numerical solutions to problems
8.6 Partial Fraction Decomposition
 628 Systems of Equations and Matrices 8.6 Partial Fraction Decomposition This section uses systems of linear equations to rewrite rational functions in a form more palatable to Calculus students. In College
628 Systems of Equations and Matrices 8.6 Partial Fraction Decomposition This section uses systems of linear equations to rewrite rational functions in a form more palatable to Calculus students. In College
A New Approach to Find Roots of Nonlinear Equations by Hybrid Algorithm to Bisection and Newton-Raphson Algorithms
 A New Approach to Find Roots of Nonlinear Equations by Hybrid Algorithm to Bisection and Newton-Raphson Algorithms Abed Ali H. Altaee 1, Haider K. Hoomod 2, Khalid Ali Hussein 3 1(Department of Mathematics/
A New Approach to Find Roots of Nonlinear Equations by Hybrid Algorithm to Bisection and Newton-Raphson Algorithms Abed Ali H. Altaee 1, Haider K. Hoomod 2, Khalid Ali Hussein 3 1(Department of Mathematics/
SYSTEMS OF NONLINEAR EQUATIONS
 SYSTEMS OF NONLINEAR EQUATIONS Widely used in the mathematical modeling of real world phenomena. We introduce some numerical methods for their solution. For better intuition, we examine systems of two
SYSTEMS OF NONLINEAR EQUATIONS Widely used in the mathematical modeling of real world phenomena. We introduce some numerical methods for their solution. For better intuition, we examine systems of two
ME 305 Fluid Mechanics I. Chapter 8 Viscous Flow in Pipes and Ducts
 ME 305 Fluid Mechanics I Chapter 8 Viscous Flow in Pipes and Ducts These presentations are prepared by Dr. Cüneyt Sert Department of Mechanical Engineering Middle East Technical University Ankara, Turkey
ME 305 Fluid Mechanics I Chapter 8 Viscous Flow in Pipes and Ducts These presentations are prepared by Dr. Cüneyt Sert Department of Mechanical Engineering Middle East Technical University Ankara, Turkey
Finding the Roots of f(x) = 0. Gerald W. Recktenwald Department of Mechanical Engineering Portland State University
 = 0. Gerald W. Recktenwald Department of Mechanical Engineering Portland State University") Finding the Roots of f(x) = 0 Gerald W. Recktenwald Department of Mechanical Engineering Portland State University gerry@me.pdx.edu These slides are a supplement to the book Numerical Methods with Matlab:
Finding the Roots of f(x) = 0 Gerald W. Recktenwald Department of Mechanical Engineering Portland State University gerry@me.pdx.edu These slides are a supplement to the book Numerical Methods with Matlab:
Finding the Roots of f(x) = 0
 = 0") Finding the Roots of f(x) = 0 Gerald W. Recktenwald Department of Mechanical Engineering Portland State University gerry@me.pdx.edu These slides are a supplement to the book Numerical Methods with Matlab:
Finding the Roots of f(x) = 0 Gerald W. Recktenwald Department of Mechanical Engineering Portland State University gerry@me.pdx.edu These slides are a supplement to the book Numerical Methods with Matlab:
Unit 2: Solving Scalar Equations. Notes prepared by: Amos Ron, Yunpeng Li, Mark Cowlishaw, Steve Wright Instructor: Steve Wright
 cs416: introduction to scientific computing 01/9/07 Unit : Solving Scalar Equations Notes prepared by: Amos Ron, Yunpeng Li, Mark Cowlishaw, Steve Wright Instructor: Steve Wright 1 Introduction We now
cs416: introduction to scientific computing 01/9/07 Unit : Solving Scalar Equations Notes prepared by: Amos Ron, Yunpeng Li, Mark Cowlishaw, Steve Wright Instructor: Steve Wright 1 Introduction We now
INSTRUCTOR: PM DR MAZLAN ABDUL WAHID
 SMJ 4463: HEAT TRANSFER INSTRUCTOR: PM DR MAZLAN ABDUL WAHID http://www.fkm.utm.my/~mazlan TEXT: Introduction to Heat Transfer by Incropera, DeWitt, Bergman, Lavine 5 th Edition, John Wiley and Sons DR
SMJ 4463: HEAT TRANSFER INSTRUCTOR: PM DR MAZLAN ABDUL WAHID http://www.fkm.utm.my/~mazlan TEXT: Introduction to Heat Transfer by Incropera, DeWitt, Bergman, Lavine 5 th Edition, John Wiley and Sons DR
DIFFERENTIATION RULES
 3 DIFFERENTIATION RULES DIFFERENTIATION RULES 3. The Product and Quotient Rules In this section, we will learn about: Formulas that enable us to differentiate new functions formed from old functions by
3 DIFFERENTIATION RULES DIFFERENTIATION RULES 3. The Product and Quotient Rules In this section, we will learn about: Formulas that enable us to differentiate new functions formed from old functions by
Nonlinear Equations. Chapter The Bisection Method
 Chapter 6 Nonlinear Equations Given a nonlinear function f(), a value r such that f(r) = 0, is called a root or a zero of f() For eample, for f() = e 016064, Fig?? gives the set of points satisfying y
Chapter 6 Nonlinear Equations Given a nonlinear function f(), a value r such that f(r) = 0, is called a root or a zero of f() For eample, for f() = e 016064, Fig?? gives the set of points satisfying y
Numerical Methods in Informatics
 Numerical Methods in Informatics Lecture 2, 30.09.2016: Nonlinear Equations in One Variable http://www.math.uzh.ch/binf4232 Tulin Kaman Institute of Mathematics, University of Zurich E-mail: tulin.kaman@math.uzh.ch
Numerical Methods in Informatics Lecture 2, 30.09.2016: Nonlinear Equations in One Variable http://www.math.uzh.ch/binf4232 Tulin Kaman Institute of Mathematics, University of Zurich E-mail: tulin.kaman@math.uzh.ch
US ARMY INTELLIGENCE CENTER CIRCUITS
 SUBCOURSE IT 0334 EDITION C US ARMY INTELLIGENCE CENTER CIRCUITS CIRCUITS Subcourse Number IT0334 EDITION C US ARMY INTELLIGENCE CENTER FORT HUACHUCA, AZ 85613-6000 4 Credit Hours Edition Date: December
SUBCOURSE IT 0334 EDITION C US ARMY INTELLIGENCE CENTER CIRCUITS CIRCUITS Subcourse Number IT0334 EDITION C US ARMY INTELLIGENCE CENTER FORT HUACHUCA, AZ 85613-6000 4 Credit Hours Edition Date: December
Variable. Peter W. White Fall 2018 / Numerical Analysis. Department of Mathematics Tarleton State University
 Newton s Iterative s Peter W. White white@tarleton.edu Department of Mathematics Tarleton State University Fall 2018 / Numerical Analysis Overview Newton s Iterative s Newton s Iterative s Newton s Iterative
Newton s Iterative s Peter W. White white@tarleton.edu Department of Mathematics Tarleton State University Fall 2018 / Numerical Analysis Overview Newton s Iterative s Newton s Iterative s Newton s Iterative
5 Finding roots of equations
 Lecture notes for Numerical Analysis 5 Finding roots of equations Topics:. Problem statement. Bisection Method 3. Newton s Method 4. Fixed Point Iterations 5. Systems of equations 6. Notes and further
Lecture notes for Numerical Analysis 5 Finding roots of equations Topics:. Problem statement. Bisection Method 3. Newton s Method 4. Fixed Point Iterations 5. Systems of equations 6. Notes and further
Introduction. An Introduction to Algorithms and Data Structures
 Introduction An Introduction to Algorithms and Data Structures Overview Aims This course is an introduction to the design, analysis and wide variety of algorithms (a topic often called Algorithmics ).
Introduction An Introduction to Algorithms and Data Structures Overview Aims This course is an introduction to the design, analysis and wide variety of algorithms (a topic often called Algorithmics ).
Root Finding Convergence Analysis
 Root Finding Convergence Analysis Justin Ross & Matthew Kwitowski November 5, 2012 There are many different ways to calculate the root of a function. Some methods are direct and can be done by simply solving
Root Finding Convergence Analysis Justin Ross & Matthew Kwitowski November 5, 2012 There are many different ways to calculate the root of a function. Some methods are direct and can be done by simply solving
/$ IEEE
 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS II: EXPRESS BRIEFS, VOL. 55, NO. 9, SEPTEMBER 2008 937 Analytical Stability Condition of the Latency Insertion Method for Nonuniform GLC Circuits Subramanian N.
IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS II: EXPRESS BRIEFS, VOL. 55, NO. 9, SEPTEMBER 2008 937 Analytical Stability Condition of the Latency Insertion Method for Nonuniform GLC Circuits Subramanian N.
CHAPTER 2 EXTRACTION OF THE QUADRATICS FROM REAL ALGEBRAIC POLYNOMIAL
 24 CHAPTER 2 EXTRACTION OF THE QUADRATICS FROM REAL ALGEBRAIC POLYNOMIAL 2.1 INTRODUCTION Polynomial factorization is a mathematical problem, which is often encountered in applied sciences and many of
24 CHAPTER 2 EXTRACTION OF THE QUADRATICS FROM REAL ALGEBRAIC POLYNOMIAL 2.1 INTRODUCTION Polynomial factorization is a mathematical problem, which is often encountered in applied sciences and many of
CLASS NOTES Computational Methods for Engineering Applications I Spring 2015
 CLASS NOTES Computational Methods for Engineering Applications I Spring 2015 Petros Koumoutsakos Gerardo Tauriello (Last update: July 2, 2015) IMPORTANT DISCLAIMERS 1. REFERENCES: Much of the material
CLASS NOTES Computational Methods for Engineering Applications I Spring 2015 Petros Koumoutsakos Gerardo Tauriello (Last update: July 2, 2015) IMPORTANT DISCLAIMERS 1. REFERENCES: Much of the material
Solution of Nonlinear Equations
 Solution of Nonlinear Equations In many engineering applications, there are cases when one needs to solve nonlinear algebraic or trigonometric equations or set of equations. These are also common in Civil
Solution of Nonlinear Equations In many engineering applications, there are cases when one needs to solve nonlinear algebraic or trigonometric equations or set of equations. These are also common in Civil
MATH 100 and MATH 180 Learning Objectives Session 2010W Term 1 (Sep Dec 2010)
") Course Prerequisites MATH 100 and MATH 180 Learning Objectives Session 2010W Term 1 (Sep Dec 2010) As a prerequisite to this course, students are required to have a reasonable mastery of precalculus mathematics
Course Prerequisites MATH 100 and MATH 180 Learning Objectives Session 2010W Term 1 (Sep Dec 2010) As a prerequisite to this course, students are required to have a reasonable mastery of precalculus mathematics
Roots of Equations. ITCS 4133/5133: Introduction to Numerical Methods 1 Roots of Equations
 Roots of Equations Direct Search, Bisection Methods Regula Falsi, Secant Methods Newton-Raphson Method Zeros of Polynomials (Horner s, Muller s methods) EigenValue Analysis ITCS 4133/5133: Introduction
Roots of Equations Direct Search, Bisection Methods Regula Falsi, Secant Methods Newton-Raphson Method Zeros of Polynomials (Horner s, Muller s methods) EigenValue Analysis ITCS 4133/5133: Introduction
TOTAL HEAD, N.P.S.H. AND OTHER CALCULATION EXAMPLES Jacques Chaurette p. eng., June 2003
 TOTAL HEAD, N.P.S.H. AND OTHER CALCULATION EXAMPLES Jacques Chaurette p. eng., www.lightmypump.com June 2003 Figure 1 Calculation example flow schematic. Situation Water at 150 F is to be pumped from a
TOTAL HEAD, N.P.S.H. AND OTHER CALCULATION EXAMPLES Jacques Chaurette p. eng., www.lightmypump.com June 2003 Figure 1 Calculation example flow schematic. Situation Water at 150 F is to be pumped from a