Model of Motor Neural Circuit of C. elegans
|
|
|
- Matthew Hoover
- 5 years ago
- Views:
Transcription
1 Model of Motor Neural Circuit of C. elegans Different models for oscillators There are several different models to generate oscillations. Among these models, some have different values for the same parameters, while some other have totally different parameters, or even totally different dynamic equation. It seems necessary to review the three main models of oscillators: Sherman s model in 199, Manor s model in 1997, and the model in the textbook Dynamical Systems in Neuroscience (referred as dsn from now on). The dsn model has two classes of firing. Class 1 can transfer input current to firing frequency continuously, and has a relatively low threshold of firing. Class has a discontinuous f-i relationship, and the threshold of firing is higher. Dsn model Specifically, this model is the model given in chapter 4 of dsn, but not the one in chapter 10. As for Class 1 firing, oscillators composed of two neurons always fire in phase, no matter how strong the gap junction (quantified as gc) is. On the contrary, Class firing can generate oscillators with a particular phase difference, whose value is dependent on gc, I (input current). In order to generate anti-phase oscillators, other parameters also need to be fine-tuned. Shown below are firing pattern and the phase trajectory of Class 1 of dsn model. The threshold input current in Class is between 10 and 0. Given other parameters, the phase difference in the steady oscillating state is dependent on I and gc, as shown in figures below. It is noteworthy that when I=50, the phase difference can be fixed, but neither in-phase nor anti-phase, which is not observed before, and not mentioned in chapter 10 of dsn.

2 When I=50, the two neurons first fire synchronically, but out of phase after a small perturbation of 0.3mV at 50ms to one of the neurons. This process can be verified by the phase trajectory below. Obviously, in this case, synchronically oscillation is not stable. The Sherman model in 199 can generate anti-phase oscillation, we will show later that Sherman model and dsn model are actually equivalent, except for different parameter values.
3 Manor s Model in 1997 This model cannot generate unsynchronized oscillator. Compared to dsn model, this model has three main difference: The two neurons are not the same. Before coupling, one of them is steady and the other one is firing. The ion channels, or specifically, the possibility of opening of the ion channel, is expressed in a different way. The time constant of the parameter of ion channel (for example, the n in dsn model) is not a constant any more, but dependent on V instead. In this model, when gc is small, the two neurons will not fire. And larger gc will lead to synchronized firing only. Sherman s Model in 199 This model can generate anti-phase oscillator if gc is chosen appropriately, as shown in the figure below. In fact, this model can be transformed into dsn model, based on the corresponding relationship listed below. Dsn model Sherman model τ(v) τ/λ n n m C g L g Na g K E Na E K, E L I n n m τ g S S g Ca g K V Ca V K I
4 Linear model for the motor neural network of C. elegans We developed a linear model for the motor neural network. And below we list the conclusions we draw from the model. The effect of c (gap junctions) Small c will lead to decrease of amplitude, and excessively large c will also lead to that, as shown in the figure below. The phase differences between adjacent segments are shown in the figure below. We find that in the region that c<0.3, or namely the amplitude increases with c, the phase difference does not vary much. But when c goes over 0.3, the critical value that the amplitude begins to decrease as c continues to increase, the phase differences drop a lot. This is intuitive because larger c represents stronger coupling between segments, which synchronizes the activity of adjacent segments. However, it is counter intuitive that the phase differences almost do not increase, or even rise a little, for some segments. It is noteworthy that the phase difference between segment 1 and segment (blue curve) is very different from other segments. This should not be account for boundary effect, since the other boundary, segment 6, does not present this phenomenon. This is probably due to the different dynamics of segment 1, compared to other segments.
5 The effect of k (proprioception) Compared with c, k has a similar influence on the damping of the amplitude, as shown in the figure below. This is intuitive because both k and c can be seen as the extent that a segment is correlated with adjacent segments. However, the relationship between k and the phase differences is not clear. This point is not totally consistent to the analytical model in supplementary materials of Wen et al 010, in which k has no effect on phase differences.
6 The effect of τ c (time constant of the dynamics of the neurons) As τ c increases, the damping of amplitude becomes more and more obvious. Here is an interesting phenomenon that larger τ c results in larger phase differences. Previously, we have shown that smaller phase differences due to larger c emerges together with drastic attenuation of amplitude. Based on these two results, we can have two likely hypothesis: (1) the phase difference is not a key factor that determine the amplitude () only if the phase difference lies in a narrow region can the wave propagate from head to tail well.
7 The effect ofη(viscosity of the medium) When η is too large, the amplitude will be attenuated greatly. Unlike the analytical model in which phase difference increases with η, the phase difference in this model has no clear relationship with η, especially when c is large. From one aspect, gap junction, or namely direct coupling between two adjacent segments is introduced, which is different from the analytical model. From another aspect, there are some differences in basic assumptions in this model compared to the analytical model. In fact, even when c=0, which is the condition of our analytical model in Wen et al 010, the phase difference, does not necessarily increase with η. And what s more, even if the phase difference of segment, 3, 4, 5 increases, the
8 relationship is not linear, which is inconsistent with the result of the analytical model. The linear relationship must base on the assumption that ω is a constant. However, here λ is a constant, while ω varies with η. Comparing the cases that c=0 and c=0.3. We find that c=0 exhibit a greater increase of phase difference as η increases. On the contrary, c=0.3 shows a kind of saturation in η-phase relationship. This may be attributed to the synchronizing effect of coupling, or namely, larger value of c, which may set an upper limit for phase difference. Although phase differences do not increase linearly with η, the formula of phase difference between segments, φ = arctan(ωτ c ) + arctan (ωτ η ), is still valid except for the segment 1, which has a different dynamics with other segments.
9 The total phase difference, which means the phase difference between segment and segment 6 (segment 1 is not taken into consideration because of its different dynamic property), also follows similar relationship with η. Phase and frequency It is predicted in Wen et al 010 that phase follows a linear relationship with the frequency of head oscillator, ω. Here we change some parameters in the dynamics that determine the oscillation, and determine the relationship between φ and ω. First, we vary τ m. The result is shown in the figure below. Then we vary τ h. We find that the frequency ω is not sensitive to τ h. We also varied τ s. The relationship between total phase difference and ω is linear in these cases. These simulation is done with c=0., k=0.5 and η = However, when we vary a, something strange happens. The total phase difference no more follows the analytical results. It may become nonlinear, and does not equal to the analytical value φ = arctan(ωτ c ) + arctan(ωτ η ).
10
11 By varying these three parameters, we managed to see the relationship between total phase difference and ω in a wide regime of ω. It is obvious that larger ω leads to larger discrepancy between simulation and analytical result. We observed the v-t relationship when the discrepancy between the analytical and the simulative results is large, in order to find the reason of the discrepancy. We find that it mainly occurs when the amplitude decreases too much. This should be an outcome of coupling between segments, or namely c. Analytical explanation for above phenomena We change the equations for each segment into a continuous form: v τ c { t = v + g c v x k τ η = k + uv. t + ck(x l). 0 < x < L l v = v 0 exp (i ( πx λ ωt)). k = k 0 exp (i ( πx l < x < 0 ωt + φ)). { λ We postulate that the solution can be expressed as: So we have v t v = V(x) exp (i ( πx λ ωt)). k = K(x) exp (i ( πx 0 < x < L l { λ ωt)). = iωv(x) exp (i (πx λ ωt)), k t = iωk(x) exp (i (πx λ v x = (V (x) + +i ( π ) V(x)) exp (i (πx λ λ ωt)). ωt)). v x = (V (x) + i ( 4π λ ) V (x) ( π λ ) V(x)) exp (i ( πx λ ωt)). Substitute into the original equation, we have iωτ c V(x) = V(x) + g c (V (x) + i ( 4π λ ) V (x) ( π λ ) V(x)) + cexp( i πl )K(x l). λ iωτ η K(x) = K(x) + uv(x).
12 Replace K(x l) with K(x) K (x)l + K (x)l /, iωτ c V(x) = V(x) + g c (V (x) + i ( 4π λ ) V (x) ( π λ ) V(x)) Then we replace K(x) with + cexp( i πl λ )(K(x) K (x)l + K (x)l ). uv(x) 1 iωτ η, cul πl (g c + exp ( i )) V (x) + (1 iωτ η ) λ (i ( 4π λ ) g c cul exp ( i πl 1 iωτ η λ )) V (x) + (iωτ c 1 g c ( π λ ) cu + exp ( i πl )) V(x) = 0. 1 iωτ η λ It is impossible for us to move forward with such a complex equation. For simplicity, we drop off the terms from K (x). g c V (x) + (i ( 4π λ ) g c cul exp ( i πl 1 iωτ η λ )) V (x) + (iωτ c 1 g c ( π λ ) cu + exp ( i πl )) V(x) = 0. 1 iωτ η λ Denote A = i ( 4π λ ) g c. cul exp ( i πl 1 iωτ η λ ). B = iωτ c 1 ( π λ ) g c + cu exp ( i πl 1 iωτ η λ ). We then write the equation in a simple form: g c V (x) + AV (x) + BV(x) = 0, Whose solution is V(x) = C 0 exp ( A A 4g c B g c x) + C 1 exp ( A + A 4g c B x). g c Because Re(A)<0, we can find that the first term of V(x) is a quickly diverging term. We have seen no quick divergence in our simulation and experiments, so we set C 0 = 0. And we can define the rate of attenuation as A+ A 4g c B g c. Because v(x) should be continuous,
13 So V(0) = v 0. C 0 = 0, C 1 = v 0. We then simplify the result we have so far, using some limiting conditions, in order to see the effect of g c and c more clearly. In our simulation, v is expressed as c*(y(i+1)+y(i-1)-*y(i)). Due to the phase difference between segments, y(i)-y(i-1), y(i+1)+y(i-1)-*y(i) are definite quantities. Since c=o(1) in our simulation, we have g c = o(λ ). Note that the c here has different meaning with c in the simulation. And c is not a small quantity. Besides g c = o(λ ), we also stipulate l λ. Just like we did before (in supplementary materials of Wen et al 010), and based on the result with respect to phase difference, we assume that the phase difference, Then A~ cul, B~ 1 + cu. ωτ η + ωτ c = o(1). g c V (x) + (i ( 4π λ ) g c cul) V (x) + ( 1 g c ( π λ ) + cu) V(x) = 0 Using a series of approximations, we have Re ( B A + B A 3 g c + B3 A 5 g c ) A + A 4g c B g c = A ( 1 g c (4g cb A ) (4g cb A ) = 1 + g c ( π λ ) cu cul = A (1 (1 4g 1 cb g c A ) ). = B A + B A 3 g c + B3 A 5 g c. x (4g cb A ) 3 ). (1 + g c ( π λ ) cu) (cul) 3 = 1 cu (1 1 cu cul (cul) g (1 cu) c + (cul) 4 g c ). (Since l λ, terms with respect to λ has been neglected.) (1 cu)3 g c + (cul) 5 g c. So there must be c<1/u, or the wave will diverge as propagating from head to tail, which does not match our simulation and our experiments. There was one figure

14 depicting the attenuation s reliance on k, which is equivalent to c here. In that figure, we do not observe divergence when k is large. This difference should be attributed to the non-linear term, tanh in our previous simulation. With tanh changed to a linear term, we can observe the diverging phenomenon, as shown in the figure below. In fact, tanh is artificially introduced into the simulation, ensuring that the active torque of a single segment of the worm will not be too large. This set of equation, gives the conclusion that as gc increases, attenuation firstly becomes weaker then stronger. When c increases, attenuation becomes weaker monotonously. This is consistence with our results of simulation at least in the region that we care about. As for larger value of c, it will cause divergence, which is not practical, but only a by-product of the model. We should not stick to the odd properties that the simulation and analytical calculation reveal about excessively large c. When g c = 0, The attenuating rate becomes 1 cu. In supplementary materials of Wen et al 010, given ωτ η + ωτ c is small, we have k i = cu k i 1. So the attenuating rate is k i 1 k i = 1 cu. k i l cul So these two analytical model meets together. However, one can also calculate the attenuating rate in supplementary materials of Wen et al 010 as k i 1 k i = 1 cu, k i 1 l l which is different from our conclusion above. This discrepancy, should be attributed to the approximation that replace K(x l) with K(x) K (x)l. Comparing the cul
15 results from the two methods of calculating attenuating rate, it is revealed that our model fits the real situation best when cu 1, which means the attenuation is slight. Phase Starting from what we have already derived, we can derive the phase difference between two adjacent segments. The rate of attenuation A+ A 4g c B, is a complex g c number, of which real part means the attenuation while the imaginary part tells the rate of phase change. Differing from our derivation before, the phase difference itself is a small quantity. According to supplementary materials of Wen et al 010, it equals to ωτ η + ωτ c. For this reason, we cannot neglect ωτ η and ωτ c here. But terms containing high power of ωτ η and ωτ c, are still neglected. A = i ( 4π λ ) g c A + A 4g c B g c = B A + B A 3 g c + B3 A 5 g c. cul exp ( i πl 1 iωτ η λ ) i (4π λ ) g c cul 1 iωτ η = i ( 4π λ ) g c cul(1 + iωτ η ) B = iωτ c 1 g c ( π λ ) + cu exp ( i πl 1 iωτ η λ ) iωτ c 1 g c ( π λ ) + cu(1 + iωτ η ). For simplicity, we denote A = x A + iy A and B = x B + iy B. For our derivation from now on. We can easily find that y A x A, y B x B. B A = x B (1 + i y B ) (1 i y A y A x A x B x A x ). A
16 Im B A = x B ( y B (1 y A x A x B x ) y A ) A x A = 1 cu + g c ( π λ ) cul + ( g c ( π λ ) 1 cu ) ) ( ω(τ c + cuτ η ) cu 1 ( 1 g c ( π λ ) 1 cu (1 (4π λ ) g c ( 8π λ ) g cculωτ η (cul) ) + ( 4π λ ) g c cul ωτ η ) + g c ( ( π λ ) ω(τ c + τ η ) cul cu 1 = ω(τ c + τ η ) cul + g c ( (π λ ) ( ω(τ c + cuτ η ) cul (1 cu) ( π λ ) + (4π λ ) cul ) + 1 cu ( ω(τ c + cuτ η ) cul (1 cu) ( π λ ) + (4π λ ) cul ) ) + (4π λ ) ω(τ c + cuτ η ) (cul) 3 ω(τ 4 c + cuτ η ) (1 cu) cul (π λ ) ) = ω(τ c + τ η ) cul + g c ( (π λ ) 4π(1 cu) ωτ cul η + (cul) λ ) 3 + g c ( (π λ ) (cul) + ( 4π λ ) ω(τ c + cuτ η ) (cul) 3 ). Im ( B A 3) = x B 3 x (y B A x B 3y A x A ). (Here we do not need to expand y A x A by g c. to higher order since Im ( B 3) will be multiplied A
17 Im ( B A 3) = x B 3 x (y B A x B (1 cu) = (cul) 3 (1 + g π c ( λ ) 1 cu ) ( 3y A x A ) ω(τ c + cuτ η ) cu 1 (1 g c ( π λ ) 1 cu ) 3 (( 4π λ ) g c culωτ η ) + cul ) = (1 cu)ω(τ c + (3 cu)τ η ) (cul) 3 + g c ( (π λ ) ω(τ c + (3 cu)τ η ) (cul) 3 ( π λ ) ω(τ c + cuτ η ) (cul) 3 1π(1 cu) (cul) 4 ) λ = (1 cu)ω(τ c + (3 cu)τ η ) (cul) 3 + g c ( (π λ ) ω(τ c + (3 cu)τ η ) (cul) 3 1π(1 cu) (cul) 4 ). λ Im ( B3 A 5) = x 3 B 5 x (3y B A (1 cu) 3 (cul) 5 (1 + 3g π c ( λ ) 1 cu ) ( x B 5y A x A ) 3 ω(τ c + cuτ η ) cu 1 (1 g c ( π λ ) 1 cu ) 5 (( 4π λ ) g c culωτ η ) + cul = (1 cu) (cul) 5 ω(3τ c + (5 cu)τ η ). )
18 Combining the three terms together, we finally have Im ( A + A 4g c B g c ) = ω(τ c + τ η ) cul + g c ( (π λ ) 4π(1 cu) ωτ cul η + (cul) λ + (1 cu)ω(τ c + (3 cu)τ η ) (cul) 3 ) 3 + g c ( (π λ ) (cul) + 6 ( π λ ) ω(τ c + τ η ) 1π(1 cu) (cul) 3 (cul) 4 λ (1 cu) (cul) 5 ω(3τ c + (5 cu)τ η )). This result is too complex for us to draw a conclusion. Since our model mainly discuss the region that cu 1 (out of this regime it will be imprecise), we neglected all the terms which have a factor (1-cu), then the result becomes dφ dx = ω(τ c + τ η ) cu Im ( A + A 4g c B g c ) ( π + g λ ) c = ω(τ c + τ η ) cul ( π g λ ) c ωτ cul η 3 + g c ( (π λ ) (cul) + 6 ( π λ ) ω(τ c + τ η ) (cul) 3 ). 3 cu ωτ η g c ( ( π λ ) (cu) l + 6 ( π λ ) ω(τ c + τ η ) (cu) 3 l ) Then we can make some explanation to the phase-gc relationship in the simulation (the first figure in this document) using this analytical result. When gc is small, the firstorder term and the second-order term basically balance each other. Even though the first-order term is dominant, because g c = o(λ ), we will observe no obvious change of the phase difference. As gc continues to increase, the second-order terms begin to dominate. Note that there s a term without ωτ η or ωτ c in the factor, so the term is quite large and can reduce the phase difference a lot.
19 If cu is very close to 1, to the extent that (1 cu)~ ω(τ c + τ η ), the derivation above is no more valid because the approximation would be wrong. In this case, it is appropriate to assume cu=1. Then we use the similar method to derive the imaginary part of A+ A 4g c B, we have g c dφ dx = ω(τ c + τ η ) + g c ( π λ ) ωτ η g c ( 3 l (π λ ) + 6 l (π λ ) ω(τ c + τ η )). The conclusion is the same. Two hypotheses about the relationship between the phase differences were proposed before. Here we have shown that, phase differences cannot determine the amplitude. On the contrary, they are independently determined by other essential parameters, such as g c and c. Intuitively, one may think g c will reduce the phase difference because it represents the extent that different segments are coupled together. However, we have shown, when g c is small, it is not necessarily that case. The effect of τ c (analytical derivation) In order to see the effect of τ c, we expand A+ A 4g c B g c simplicity, we neglect terms containing g c. Re ( A + A 4g c B ) = Re ( B g c A + B A 3 g c) into power series of τ c. For = 1 cu (1 1 cu cul (cul) g c) + 4πωτ cg c (cul) λ + g c cul (π λ ). Im ( A + A 4g c B ) = Im ( B g c A + B A 3 g c) = ω(τ c + τ η ) cul + (1 cu)ωτ c (cul) 3 g c + g c ( ( π λ ) ωτ cul η + 4π(1 cu) (cul) λ + (1 cu)(3 cu)τ η (cul) 3 ).
20 Obviously, as τ c increases, ω will not change, so Re ( A+ A 4g c B ) will increase, g c resulting in more drastic attenuation. And in the other aspect, Im ( A+ A 4g c B ) will g c decrease, leading to a linearly increasing phase difference between segments. This two conclusions, both fits the simulation before very well. Mid-Oscillator It is observed in the experiments that there will be an oscillator at the middle of the body when the worm s head is repressed. And the frequency of this mid-oscillator, is independent on the viscosity of the environment in a large regime. So we insert another oscillator into the model. Since the curvature of a segment is dependent on the viscosity of the environment, the local curvature should not be involve in the dynamics of the mid-oscillator. Thus the mid-oscillator will have an independent intrinsic frequency. However, because proprioceptive coupling still exists, the curvature of the prior segment, can still control the dynamics of the oscillator. It is already shown in the experiments that when the head part is not repressed, the mid-oscillator does not appear due to the forced oscillation based on proprioception. The dynamics of the mid-oscillator is written in the form: dv τ c dt = v v3 + bk i 1 au + I du τ h = u + v dt { (τ η + τ m ) dk = k + tanh(v). dt where k i 1 denotes the curvature of the prior segment. τ m plays a role of mediating the amplitude of this oscillator. It is observed in the experiments that the amplitude of this mid-oscillator is never larger than the head oscillator. So we should control the amplitude here. I is the external current, which can repress the oscillator. b is the strength of the proprioceptive coupling. a is a critical parameter which can control the frequency of this oscillator. In experiment, the frequency is about 1.5Hz, which is the frequency of the whole worm when η = 100. According to this standard, we fine tune a and finally set a = 1. Then we simulate the worm s properties after the introduction of this mid-oscillator. We find that compared to the case that there is only one oscillator, the amplitude is enhanced for all c from 0 to 0.5. So we postulate that the mid-oscillator can relay the wave and thus prevent it from attenuation. From another aspect, mid-oscillator improves the robustness of the network. We find that the wave can still propagate well
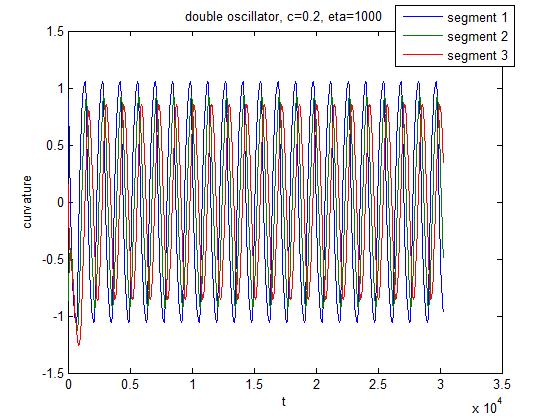
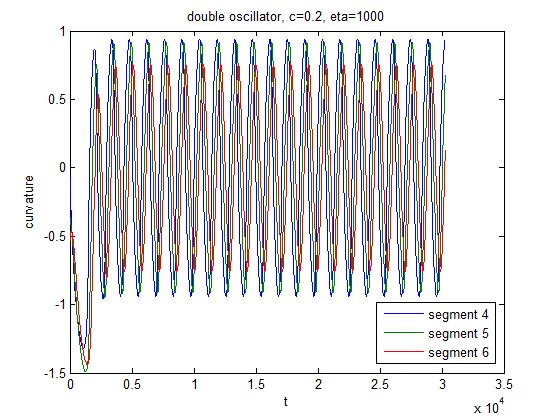
21 when c=0.5, which is too large for the wave to propagate when there is only one oscillator. The phase difference between segments, seems to be insensitive to c. This coincide with the case of one single oscillator. Other parameters: η = 1000, k=0.5. As an example, we simulate the detailed dynamics when c=0. and η = 1000.
22

23 We also simulate the case that the head is repressed by blocking the stimulation from y(4) to y(5), and from y(6) to y(7). This means the muscle of segment and segment 3 cannot provide any torque at all. In this case we find that the rear part of the worm oscillate in an independent and fast frequency. Since all the head oscillator can dominate over the middle oscillator, we do not need to develop a new analytical explanation especially for worms containing two oscillators. The basic mechanism behind all these phenomenon can be attributed to forced oscillation, which is only a simple physical concept. Attempt to introduce gap junction to oscillators We have not introduced any gap junction to oscillators so far. This is because that excessively strong gap junction could be detrimental to the oscillators. However, this is not very reasonable because it is observed in the experiments that when the middle part of the worm is repressed, the head will also be still, which indicates that the motion in the middle can affect the motion of the head. Since proprioception can only propagate wave form head to the tail, it must be gap junctions that affect the head oscillator. Here we fix c=0. and η = 1000, and we vary the strength of the gap junction linked to the oscillators, which we denote as c 1 below, to see how we should solve this problem in the model. As an attempt, we first allow the gap junction to be not balanced, which means the two segments can influence each other in different extent, but with the same gap junction. This is still not very reasonable, we may modify this later. We find that the maximal strength of the gap junction is about Beyond this value, the whole worm will paralyze. Within the small regime from 0 to 0.04, the minimal
24 amplitude is increasing. We also find that the frequency decreases as c 1 increases. Theoretically, after introducing gap junctions to the oscillators, the mid-oscillator can affect and adjust the frequency of the head oscillator. However, we have not found this phenomenon. On the contrary, the frequency of the mid oscillator is always determined by head. This may be because introduced gap junction is much weaker then proprioception. Then we change the assumption of the gap junction. We stipulate that the mutual influence via gap junction is equal for both adjacent segments. We find that the strength here, denoted as c, has similar effect on the network as c 1. Since the proprioceptive coupling is already sufficiently strong, weak gap junction of
25 oscillators will not lead to severe attenuation. So this can be a good way of incorporate gap junction into the oscillators in our model.
26 There can be another way to understand the dynamics of the oscillators. We can postulate that the intrinsic dynamics of oscillator is very robust, which can be hardly affected by the gap junctions. We can write the dynamic equation in the form: (Mτ) dv dt = M(f(v) + g(u)) + c(v i 1 + v i+1 ). M can be seen as the robustness of the intrinsic dynamics of the oscillator. If M > 1, c can also be larger, and approximate the c of other segments.
A More Complicated Model of Motor Neural Circuit of C. elegans
 A More Complicated Model of Motor Neural Circuit of C. elegans Overview Locomotion of C. elegans follows a nonlinear dynamics proposed in Fang-Yen et al. 2010. The dynamic equation is written as y C N
A More Complicated Model of Motor Neural Circuit of C. elegans Overview Locomotion of C. elegans follows a nonlinear dynamics proposed in Fang-Yen et al. 2010. The dynamic equation is written as y C N
Supplementary information for:
 Supplementary information for: Synaptic polarity of the interneuron circuit controlling C. elegans locomotion Franciszek Rakowski a, Jagan Srinivasan b, Paul W. Sternberg b, and Jan Karbowski c,d a Interdisciplinary
Supplementary information for: Synaptic polarity of the interneuron circuit controlling C. elegans locomotion Franciszek Rakowski a, Jagan Srinivasan b, Paul W. Sternberg b, and Jan Karbowski c,d a Interdisciplinary
Suppression of the primary resonance vibrations of a forced nonlinear system using a dynamic vibration absorber
 Suppression of the primary resonance vibrations of a forced nonlinear system using a dynamic vibration absorber J.C. Ji, N. Zhang Faculty of Engineering, University of Technology, Sydney PO Box, Broadway,
Suppression of the primary resonance vibrations of a forced nonlinear system using a dynamic vibration absorber J.C. Ji, N. Zhang Faculty of Engineering, University of Technology, Sydney PO Box, Broadway,
Supporting Information. Methods. Equations for four regimes
 Supporting Information A Methods All analytical expressions were obtained starting from quation 3, the tqssa approximation of the cycle, the derivation of which is discussed in Appendix C. The full mass
Supporting Information A Methods All analytical expressions were obtained starting from quation 3, the tqssa approximation of the cycle, the derivation of which is discussed in Appendix C. The full mass
Saturation of Information Exchange in Locally Connected Pulse-Coupled Oscillators
 Saturation of Information Exchange in Locally Connected Pulse-Coupled Oscillators Will Wagstaff School of Computer Science, Georgia Institute of Technology, Atlanta, Georgia 30332, USA (Dated: 13 December
Saturation of Information Exchange in Locally Connected Pulse-Coupled Oscillators Will Wagstaff School of Computer Science, Georgia Institute of Technology, Atlanta, Georgia 30332, USA (Dated: 13 December
x(t+ δt) - x(t) = slope δt t+δt
 - x(t) = slope δt t+δt") Techniques of Physics Worksheet 2 Classical Vibrations and Waves Introduction You will have encountered many different examples of wave phenomena in your courses and should be familiar with most of the
Techniques of Physics Worksheet 2 Classical Vibrations and Waves Introduction You will have encountered many different examples of wave phenomena in your courses and should be familiar with most of the
Waves in a Shock Tube
 Waves in a Shock Tube Ivan Christov c February 5, 005 Abstract. This paper discusses linear-wave solutions and simple-wave solutions to the Navier Stokes equations for an inviscid and compressible fluid
Waves in a Shock Tube Ivan Christov c February 5, 005 Abstract. This paper discusses linear-wave solutions and simple-wave solutions to the Navier Stokes equations for an inviscid and compressible fluid
Effects of Interactive Function Forms in a Self-Organized Critical Model Based on Neural Networks
 Commun. Theor. Phys. (Beijing, China) 40 (2003) pp. 607 613 c International Academic Publishers Vol. 40, No. 5, November 15, 2003 Effects of Interactive Function Forms in a Self-Organized Critical Model
Commun. Theor. Phys. (Beijing, China) 40 (2003) pp. 607 613 c International Academic Publishers Vol. 40, No. 5, November 15, 2003 Effects of Interactive Function Forms in a Self-Organized Critical Model
Lab 1: Damped, Driven Harmonic Oscillator
 1 Introduction Lab 1: Damped, Driven Harmonic Oscillator The purpose of this experiment is to study the resonant properties of a driven, damped harmonic oscillator. This type of motion is characteristic
1 Introduction Lab 1: Damped, Driven Harmonic Oscillator The purpose of this experiment is to study the resonant properties of a driven, damped harmonic oscillator. This type of motion is characteristic
Dimensions. 1 gt. y(t) = 2
 = 2") 3 3 1 Dimensions Dimensions, often called units, are familiar creatures in physics and engineering. They are also helpful in mathematics, as I hope to show you with examples from differentiation, integration,
3 3 1 Dimensions Dimensions, often called units, are familiar creatures in physics and engineering. They are also helpful in mathematics, as I hope to show you with examples from differentiation, integration,
The Maximally-Flat Current Transformer 1 By David W Knight
 1 The Maximally-Flat Current Transformer 1 By David W Knight In the design of current transformers for broadband RF applications, good performance at the lowfrequency end of the operating range requires
1 The Maximally-Flat Current Transformer 1 By David W Knight In the design of current transformers for broadband RF applications, good performance at the lowfrequency end of the operating range requires
Lab 1: damped, driven harmonic oscillator
 Lab 1: damped, driven harmonic oscillator 1 Introduction The purpose of this experiment is to study the resonant properties of a driven, damped harmonic oscillator. This type of motion is characteristic
Lab 1: damped, driven harmonic oscillator 1 Introduction The purpose of this experiment is to study the resonant properties of a driven, damped harmonic oscillator. This type of motion is characteristic
2. As we shall see, we choose to write in terms of σ x because ( X ) 2 = σ 2 x.
 2 = σ 2 x.") Section 5.1 Simple One-Dimensional Problems: The Free Particle Page 9 The Free Particle Gaussian Wave Packets The Gaussian wave packet initial state is one of the few states for which both the { x } and
Section 5.1 Simple One-Dimensional Problems: The Free Particle Page 9 The Free Particle Gaussian Wave Packets The Gaussian wave packet initial state is one of the few states for which both the { x } and
Lecture 1: sine-gordon equation and solutions
 Lecture 1: sine-gordon equation and solutions Equivalent circuit Derivation of sine-gordon equation The most important solutions plasma waves a soliton! chain of solitons resistive state breather and friends
Lecture 1: sine-gordon equation and solutions Equivalent circuit Derivation of sine-gordon equation The most important solutions plasma waves a soliton! chain of solitons resistive state breather and friends
Topics in Neurophysics
 Topics in Neurophysics Alex Loebel, Martin Stemmler and Anderas Herz Exercise 2 Solution (1) The Hodgkin Huxley Model The goal of this exercise is to simulate the action potential according to the model
Topics in Neurophysics Alex Loebel, Martin Stemmler and Anderas Herz Exercise 2 Solution (1) The Hodgkin Huxley Model The goal of this exercise is to simulate the action potential according to the model
Electrophysiology of the neuron
 School of Mathematical Sciences G4TNS Theoretical Neuroscience Electrophysiology of the neuron Electrophysiology is the study of ionic currents and electrical activity in cells and tissues. The work of
School of Mathematical Sciences G4TNS Theoretical Neuroscience Electrophysiology of the neuron Electrophysiology is the study of ionic currents and electrical activity in cells and tissues. The work of
+ + ( + ) = Linear recurrent networks. Simpler, much more amenable to analytic treatment E.g. by choosing
 = Linear recurrent networks. Simpler, much more amenable to analytic treatment E.g. by choosing") Linear recurrent networks Simpler, much more amenable to analytic treatment E.g. by choosing + ( + ) = Firing rates can be negative Approximates dynamics around fixed point Approximation often reasonable
Linear recurrent networks Simpler, much more amenable to analytic treatment E.g. by choosing + ( + ) = Firing rates can be negative Approximates dynamics around fixed point Approximation often reasonable
2.1 The Ether and the Michelson-Morley Experiment
 Chapter. Special Relativity Notes: Some material presented in this chapter is taken The Feynman Lectures on Physics, Vol. I by R. P. Feynman, R. B. Leighton, and M. Sands, Chap. 15 (1963, Addison-Wesley)..1
Chapter. Special Relativity Notes: Some material presented in this chapter is taken The Feynman Lectures on Physics, Vol. I by R. P. Feynman, R. B. Leighton, and M. Sands, Chap. 15 (1963, Addison-Wesley)..1
This is the 15th lecture of this course in which we begin a new topic, Excess Carriers. This topic will be covered in two lectures.
 Solid State Devices Dr. S. Karmalkar Department of Electronics and Communication Engineering Indian Institute of Technology, Madras Lecture - 15 Excess Carriers This is the 15th lecture of this course
Solid State Devices Dr. S. Karmalkar Department of Electronics and Communication Engineering Indian Institute of Technology, Madras Lecture - 15 Excess Carriers This is the 15th lecture of this course
Robotics. Dynamics. Marc Toussaint U Stuttgart
 Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler recursion, general robot dynamics, joint space control, reference trajectory
Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler recursion, general robot dynamics, joint space control, reference trajectory
kg meter ii) Note the dimensions of ρ τ are kg 2 velocity 2 meter = 1 sec 2 We will interpret this velocity in upcoming slides.
 Note the dimensions of ρ τ are kg 2 velocity 2 meter = 1 sec 2 We will interpret this velocity in upcoming slides.") II. Generalizing the 1-dimensional wave equation First generalize the notation. i) "q" has meant transverse deflection of the string. Replace q Ψ, where Ψ may indicate other properties of the medium that
II. Generalizing the 1-dimensional wave equation First generalize the notation. i) "q" has meant transverse deflection of the string. Replace q Ψ, where Ψ may indicate other properties of the medium that
Pulsed Lasers Revised: 2/12/14 15: , Henry Zmuda Set 5a Pulsed Lasers
 Pulsed Lasers Revised: 2/12/14 15:27 2014, Henry Zmuda Set 5a Pulsed Lasers 1 Laser Dynamics Puled Lasers More efficient pulsing schemes are based on turning the laser itself on and off by means of an
Pulsed Lasers Revised: 2/12/14 15:27 2014, Henry Zmuda Set 5a Pulsed Lasers 1 Laser Dynamics Puled Lasers More efficient pulsing schemes are based on turning the laser itself on and off by means of an
6.3.4 Action potential
 I ion C m C m dφ dt Figure 6.8: Electrical circuit model of the cell membrane. Normally, cells are net negative inside the cell which results in a non-zero resting membrane potential. The membrane potential
I ion C m C m dφ dt Figure 6.8: Electrical circuit model of the cell membrane. Normally, cells are net negative inside the cell which results in a non-zero resting membrane potential. The membrane potential
Mathematical Foundations of Neuroscience - Lecture 3. Electrophysiology of neurons - continued
 Mathematical Foundations of Neuroscience - Lecture 3. Electrophysiology of neurons - continued Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland
Mathematical Foundations of Neuroscience - Lecture 3. Electrophysiology of neurons - continued Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland
Resonance and response
 Chapter 2 Resonance and response Last updated September 20, 2008 In this section of the course we begin with a very simple system a mass hanging from a spring and see how some remarkable ideas emerge.
Chapter 2 Resonance and response Last updated September 20, 2008 In this section of the course we begin with a very simple system a mass hanging from a spring and see how some remarkable ideas emerge.
How many initial conditions are required to fully determine the general solution to a 2nd order linear differential equation?
 How many initial conditions are required to fully determine the general solution to a 2nd order linear differential equation? (A) 0 (B) 1 (C) 2 (D) more than 2 (E) it depends or don t know How many of
How many initial conditions are required to fully determine the general solution to a 2nd order linear differential equation? (A) 0 (B) 1 (C) 2 (D) more than 2 (E) it depends or don t know How many of
Effects of Betaxolol on Hodgkin-Huxley Model of Tiger Salamander Retinal Ganglion Cell
 Effects of Betaxolol on Hodgkin-Huxley Model of Tiger Salamander Retinal Ganglion Cell 1. Abstract Matthew Dunlevie Clement Lee Indrani Mikkilineni mdunlevi@ucsd.edu cll008@ucsd.edu imikkili@ucsd.edu Isolated
Effects of Betaxolol on Hodgkin-Huxley Model of Tiger Salamander Retinal Ganglion Cell 1. Abstract Matthew Dunlevie Clement Lee Indrani Mikkilineni mdunlevi@ucsd.edu cll008@ucsd.edu imikkili@ucsd.edu Isolated
Nearly Free Electron Gas model - II
 Nearly Free Electron Gas model - II Contents 1 Lattice scattering 1 1.1 Bloch waves............................ 2 1.2 Band gap formation........................ 3 1.3 Electron group velocity and effective
Nearly Free Electron Gas model - II Contents 1 Lattice scattering 1 1.1 Bloch waves............................ 2 1.2 Band gap formation........................ 3 1.3 Electron group velocity and effective
Dynamical Systems in Neuroscience: Elementary Bifurcations
 Dynamical Systems in Neuroscience: Elementary Bifurcations Foris Kuang May 2017 1 Contents 1 Introduction 3 2 Definitions 3 3 Hodgkin-Huxley Model 3 4 Morris-Lecar Model 4 5 Stability 5 5.1 Linear ODE..............................................
Dynamical Systems in Neuroscience: Elementary Bifurcations Foris Kuang May 2017 1 Contents 1 Introduction 3 2 Definitions 3 3 Hodgkin-Huxley Model 3 4 Morris-Lecar Model 4 5 Stability 5 5.1 Linear ODE..............................................
Application of Viscous Vortex Domains Method for Solving Flow-Structure Problems
 Application of Viscous Vortex Domains Method for Solving Flow-Structure Problems Yaroslav Dynnikov 1, Galina Dynnikova 1 1 Institute of Mechanics of Lomonosov Moscow State University, Michurinskiy pr.
Application of Viscous Vortex Domains Method for Solving Flow-Structure Problems Yaroslav Dynnikov 1, Galina Dynnikova 1 1 Institute of Mechanics of Lomonosov Moscow State University, Michurinskiy pr.
Spontaneous Speed Reversals in Stepper Motors
 Spontaneous Speed Reversals in Stepper Motors Marc Bodson University of Utah Electrical & Computer Engineering 50 S Central Campus Dr Rm 3280 Salt Lake City, UT 84112, U.S.A. Jeffrey S. Sato & Stephen
Spontaneous Speed Reversals in Stepper Motors Marc Bodson University of Utah Electrical & Computer Engineering 50 S Central Campus Dr Rm 3280 Salt Lake City, UT 84112, U.S.A. Jeffrey S. Sato & Stephen
Linear and Nonlinear Oscillators (Lecture 2)
") Linear and Nonlinear Oscillators (Lecture 2) January 25, 2016 7/441 Lecture outline A simple model of a linear oscillator lies in the foundation of many physical phenomena in accelerator dynamics. A typical
Linear and Nonlinear Oscillators (Lecture 2) January 25, 2016 7/441 Lecture outline A simple model of a linear oscillator lies in the foundation of many physical phenomena in accelerator dynamics. A typical
Introduction to Physiology V - Coupling and Propagation
 Introduction to Physiology V - Coupling and Propagation J. P. Keener Mathematics Department Coupling and Propagation p./33 Spatially Extended Excitable Media Neurons and axons Coupling and Propagation
Introduction to Physiology V - Coupling and Propagation J. P. Keener Mathematics Department Coupling and Propagation p./33 Spatially Extended Excitable Media Neurons and axons Coupling and Propagation
Analysis and Design of Control Systems in the Time Domain
 Chapter 6 Analysis and Design of Control Systems in the Time Domain 6. Concepts of feedback control Given a system, we can classify it as an open loop or a closed loop depends on the usage of the feedback.
Chapter 6 Analysis and Design of Control Systems in the Time Domain 6. Concepts of feedback control Given a system, we can classify it as an open loop or a closed loop depends on the usage of the feedback.
Plasma Physics Prof. V. K. Tripathi Department of Physics Indian Institute of Technology, Delhi
 Plasma Physics Prof. V. K. Tripathi Department of Physics Indian Institute of Technology, Delhi Lecture No. # 09 Electromagnetic Wave Propagation Inhomogeneous Plasma (Refer Slide Time: 00:33) Today, I
Plasma Physics Prof. V. K. Tripathi Department of Physics Indian Institute of Technology, Delhi Lecture No. # 09 Electromagnetic Wave Propagation Inhomogeneous Plasma (Refer Slide Time: 00:33) Today, I
The Harmonic Oscillator
 The Harmonic Oscillator Math 4: Ordinary Differential Equations Chris Meyer May 3, 008 Introduction The harmonic oscillator is a common model used in physics because of the wide range of problems it can
The Harmonic Oscillator Math 4: Ordinary Differential Equations Chris Meyer May 3, 008 Introduction The harmonic oscillator is a common model used in physics because of the wide range of problems it can
AT2 Neuromodeling: Problem set #3 SPIKE TRAINS
 AT2 Neuromodeling: Problem set #3 SPIKE TRAINS Younesse Kaddar PROBLEM 1: Poisson spike trains Link of the ipython notebook for the code Brain neuron emit spikes seemingly randomly: we will aim to model
AT2 Neuromodeling: Problem set #3 SPIKE TRAINS Younesse Kaddar PROBLEM 1: Poisson spike trains Link of the ipython notebook for the code Brain neuron emit spikes seemingly randomly: we will aim to model
Observations on the ponderomotive force
 Observations on the ponderomotive force D.A. Burton a, R.A. Cairns b, B. Ersfeld c, A. Noble c, S. Yoffe c, and D.A. Jaroszynski c a University of Lancaster, Physics Department, Lancaster LA1 4YB, UK b
Observations on the ponderomotive force D.A. Burton a, R.A. Cairns b, B. Ersfeld c, A. Noble c, S. Yoffe c, and D.A. Jaroszynski c a University of Lancaster, Physics Department, Lancaster LA1 4YB, UK b
Alternating Current. Symbol for A.C. source. A.C.
 Alternating Current Kirchoff s rules for loops and junctions may be used to analyze complicated circuits such as the one below, powered by an alternating current (A.C.) source. But the analysis can quickly
Alternating Current Kirchoff s rules for loops and junctions may be used to analyze complicated circuits such as the one below, powered by an alternating current (A.C.) source. But the analysis can quickly
Phys460.nb Back to our example. on the same quantum state. i.e., if we have initial condition (5.241) ψ(t = 0) = χ n (t = 0)
 ψ(t = 0) = χ n (t = 0)") Phys46.nb 89 on the same quantum state. i.e., if we have initial condition ψ(t ) χ n (t ) (5.41) then at later time ψ(t) e i ϕ(t) χ n (t) (5.4) This phase ϕ contains two parts ϕ(t) - E n(t) t + ϕ B (t)
Phys46.nb 89 on the same quantum state. i.e., if we have initial condition ψ(t ) χ n (t ) (5.41) then at later time ψ(t) e i ϕ(t) χ n (t) (5.4) This phase ϕ contains two parts ϕ(t) - E n(t) t + ϕ B (t)
The Effects of Voltage Gated Gap. Networks
 The Effects of Voltage Gated Gap Junctions on Phase Locking in Neuronal Networks Tim Lewis Department of Mathematics, Graduate Group in Applied Mathematics (GGAM) University of California, Davis with Donald
The Effects of Voltage Gated Gap Junctions on Phase Locking in Neuronal Networks Tim Lewis Department of Mathematics, Graduate Group in Applied Mathematics (GGAM) University of California, Davis with Donald
UNDERSTANDING BOLTZMANN S ANALYSIS VIA. Contents SOLVABLE MODELS
 UNDERSTANDING BOLTZMANN S ANALYSIS VIA Contents SOLVABLE MODELS 1 Kac ring model 2 1.1 Microstates............................ 3 1.2 Macrostates............................ 6 1.3 Boltzmann s entropy.......................
UNDERSTANDING BOLTZMANN S ANALYSIS VIA Contents SOLVABLE MODELS 1 Kac ring model 2 1.1 Microstates............................ 3 1.2 Macrostates............................ 6 1.3 Boltzmann s entropy.......................
Light as a Transverse Wave.
 Waves and Superposition (Keating Chapter 21) The ray model for light (i.e. light travels in straight lines) can be used to explain a lot of phenomena (like basic object and image formation and even aberrations)
Waves and Superposition (Keating Chapter 21) The ray model for light (i.e. light travels in straight lines) can be used to explain a lot of phenomena (like basic object and image formation and even aberrations)
Maxwell s equations and EM waves. From previous Lecture Time dependent fields and Faraday s Law
 Maxwell s equations and EM waves This Lecture More on Motional EMF and Faraday s law Displacement currents Maxwell s equations EM Waves From previous Lecture Time dependent fields and Faraday s Law 1 Radar
Maxwell s equations and EM waves This Lecture More on Motional EMF and Faraday s law Displacement currents Maxwell s equations EM Waves From previous Lecture Time dependent fields and Faraday s Law 1 Radar
Synchronization and Phase Oscillators
 1 Synchronization and Phase Oscillators Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 Synchronization
1 Synchronization and Phase Oscillators Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 Synchronization
Traffic Flow Theory & Simulation
 Traffic Flow Theory & Simulation S.P. Hoogendoorn Lecture 7 Introduction to Phenomena Introduction to phenomena And some possible explanations... 2/5/2011, Prof. Dr. Serge Hoogendoorn, Delft University
Traffic Flow Theory & Simulation S.P. Hoogendoorn Lecture 7 Introduction to Phenomena Introduction to phenomena And some possible explanations... 2/5/2011, Prof. Dr. Serge Hoogendoorn, Delft University
Chapter 30 Examples : Inductance (sections 1 through 6) Key concepts: (See chapter 29 also.)
 Key concepts: (See chapter 29 also.)") Chapter 30 Examples : Inductance (sections 1 through 6) Key concepts: (See chapter 29 also.) ξ 2 = MdI 1 /dt : A changing current in a coil of wire (1) will induce an EMF in a second coil (2) placed nearby.
Chapter 30 Examples : Inductance (sections 1 through 6) Key concepts: (See chapter 29 also.) ξ 2 = MdI 1 /dt : A changing current in a coil of wire (1) will induce an EMF in a second coil (2) placed nearby.
Dynamical Systems and Chaos Part I: Theoretical Techniques. Lecture 4: Discrete systems + Chaos. Ilya Potapov Mathematics Department, TUT Room TD325
 Dynamical Systems and Chaos Part I: Theoretical Techniques Lecture 4: Discrete systems + Chaos Ilya Potapov Mathematics Department, TUT Room TD325 Discrete maps x n+1 = f(x n ) Discrete time steps. x 0
Dynamical Systems and Chaos Part I: Theoretical Techniques Lecture 4: Discrete systems + Chaos Ilya Potapov Mathematics Department, TUT Room TD325 Discrete maps x n+1 = f(x n ) Discrete time steps. x 0
LINEAR RESPONSE THEORY
 MIT Department of Chemistry 5.74, Spring 5: Introductory Quantum Mechanics II Instructor: Professor Andrei Tokmakoff p. 8 LINEAR RESPONSE THEORY We have statistically described the time-dependent behavior
MIT Department of Chemistry 5.74, Spring 5: Introductory Quantum Mechanics II Instructor: Professor Andrei Tokmakoff p. 8 LINEAR RESPONSE THEORY We have statistically described the time-dependent behavior
Wave Phenomena Physics 15c. Lecture 11 Dispersion
 Wave Phenomena Physics 15c Lecture 11 Dispersion What We Did Last Time Defined Fourier transform f (t) = F(ω)e iωt dω F(ω) = 1 2π f(t) and F(w) represent a function in time and frequency domains Analyzed
Wave Phenomena Physics 15c Lecture 11 Dispersion What We Did Last Time Defined Fourier transform f (t) = F(ω)e iωt dω F(ω) = 1 2π f(t) and F(w) represent a function in time and frequency domains Analyzed
εx 2 + x 1 = 0. (2) Suppose we try a regular perturbation expansion on it. Setting ε = 0 gives x 1 = 0,
 Suppose we try a regular perturbation expansion on it. Setting ε = 0 gives x 1 = 0,") 4 Rescaling In this section we ll look at one of the reasons that our ε = 0 system might not have enough solutions, and introduce a tool that is fundamental to all perturbation systems. We ll start with
4 Rescaling In this section we ll look at one of the reasons that our ε = 0 system might not have enough solutions, and introduce a tool that is fundamental to all perturbation systems. We ll start with
Uniform Plane Waves. Ranga Rodrigo. University of Moratuwa. November 7, 2008
 Uniform Plane Waves Ranga Rodrigo University of Moratuwa November 7, 2008 Ranga Rodrigo (University of Moratuwa) Uniform Plane Waves November 7, 2008 1 / 51 Summary of Last Week s Lecture Basic Relations
Uniform Plane Waves Ranga Rodrigo University of Moratuwa November 7, 2008 Ranga Rodrigo (University of Moratuwa) Uniform Plane Waves November 7, 2008 1 / 51 Summary of Last Week s Lecture Basic Relations
Stability of Shear Flow
 Stability of Shear Flow notes by Zhan Wang and Sam Potter Revised by FW WHOI GFD Lecture 3 June, 011 A look at energy stability, valid for all amplitudes, and linear stability for shear flows. 1 Nonlinear
Stability of Shear Flow notes by Zhan Wang and Sam Potter Revised by FW WHOI GFD Lecture 3 June, 011 A look at energy stability, valid for all amplitudes, and linear stability for shear flows. 1 Nonlinear
Dust acoustic solitary and shock waves in strongly coupled dusty plasmas with nonthermal ions
 PRAMANA c Indian Academy of Sciences Vol. 73, No. 5 journal of November 2009 physics pp. 913 926 Dust acoustic solitary and shock waves in strongly coupled dusty plasmas with nonthermal ions HAMID REZA
PRAMANA c Indian Academy of Sciences Vol. 73, No. 5 journal of November 2009 physics pp. 913 926 Dust acoustic solitary and shock waves in strongly coupled dusty plasmas with nonthermal ions HAMID REZA
Relevant sections from AMATH 351 Course Notes (Wainwright): 1.3 Relevant sections from AMATH 351 Course Notes (Poulin and Ingalls): 1.1.
: 1.3 Relevant sections from AMATH 351 Course Notes (Poulin and Ingalls): 1.1.") Lecture 8 Qualitative Behaviour of Solutions to ODEs Relevant sections from AMATH 351 Course Notes (Wainwright): 1.3 Relevant sections from AMATH 351 Course Notes (Poulin and Ingalls): 1.1.1 The last few
Lecture 8 Qualitative Behaviour of Solutions to ODEs Relevant sections from AMATH 351 Course Notes (Wainwright): 1.3 Relevant sections from AMATH 351 Course Notes (Poulin and Ingalls): 1.1.1 The last few
Harmonic Oscillator with raising and lowering operators. We write the Schrödinger equation for the harmonic oscillator in one dimension as follows:
 We write the Schrödinger equation for the harmonic oscillator in one dimension as follows: H ˆ! = "!2 d 2! + 1 2µ dx 2 2 kx 2! = E! T ˆ = "! 2 2µ d 2 dx 2 V ˆ = 1 2 kx 2 H ˆ = ˆ T + ˆ V (1) where µ is
We write the Schrödinger equation for the harmonic oscillator in one dimension as follows: H ˆ! = "!2 d 2! + 1 2µ dx 2 2 kx 2! = E! T ˆ = "! 2 2µ d 2 dx 2 V ˆ = 1 2 kx 2 H ˆ = ˆ T + ˆ V (1) where µ is
(Refer Slide Time: 1:49)
") Analog Electronic Circuits Professor S. C. Dutta Roy Department of Electrical Engineering Indian Institute of Technology Delhi Lecture no 14 Module no 01 Midband analysis of FET Amplifiers (Refer Slide
Analog Electronic Circuits Professor S. C. Dutta Roy Department of Electrical Engineering Indian Institute of Technology Delhi Lecture no 14 Module no 01 Midband analysis of FET Amplifiers (Refer Slide
0.1 Infinite Limits 2 = (2 1) =. Finally, we conclude that
 =. Finally, we conclude that") 0. Infinite Limits The concept of infinity (or symbolically, ) plays an important role in calculus. This concept is related to the boundedness of a function. Definition 0.. (Bounded Function). A function
0. Infinite Limits The concept of infinity (or symbolically, ) plays an important role in calculus. This concept is related to the boundedness of a function. Definition 0.. (Bounded Function). A function
NON LINEAR ANOMALOUS SKIN EFFECT IN METALS
 www.arpapress.com/volumes/vol7issue3/ijrras_7_3_14.pdf NON LINEAR ANOMALOUS SKIN EFFECT IN METALS Arthur Ekpekpo Department of Physics, Delta State University, Abraka, Nigeria E-mail: arthurekpekpo@yahoo.com
www.arpapress.com/volumes/vol7issue3/ijrras_7_3_14.pdf NON LINEAR ANOMALOUS SKIN EFFECT IN METALS Arthur Ekpekpo Department of Physics, Delta State University, Abraka, Nigeria E-mail: arthurekpekpo@yahoo.com
ODEs. September 7, Consider the following system of two coupled first-order ordinary differential equations (ODEs): A =
: A =") ODEs September 7, 2017 In [1]: using Interact, PyPlot 1 Exponential growth and decay Consider the following system of two coupled first-order ordinary differential equations (ODEs): d x/dt = A x for the
ODEs September 7, 2017 In [1]: using Interact, PyPlot 1 Exponential growth and decay Consider the following system of two coupled first-order ordinary differential equations (ODEs): d x/dt = A x for the
Workshop on Heterogeneous Computing, 16-20, July No Monte Carlo is safe Monte Carlo - more so parallel Monte Carlo
 Workshop on Heterogeneous Computing, 16-20, July 2012 No Monte Carlo is safe Monte Carlo - more so parallel Monte Carlo K. P. N. Murthy School of Physics, University of Hyderabad July 19, 2012 K P N Murthy
Workshop on Heterogeneous Computing, 16-20, July 2012 No Monte Carlo is safe Monte Carlo - more so parallel Monte Carlo K. P. N. Murthy School of Physics, University of Hyderabad July 19, 2012 K P N Murthy
Damped harmonic motion
 Damped harmonic motion March 3, 016 Harmonic motion is studied in the presence of a damping force proportional to the velocity. The complex method is introduced, and the different cases of under-damping,
Damped harmonic motion March 3, 016 Harmonic motion is studied in the presence of a damping force proportional to the velocity. The complex method is introduced, and the different cases of under-damping,
7 Rate-Based Recurrent Networks of Threshold Neurons: Basis for Associative Memory
 Physics 178/278 - David Kleinfeld - Fall 2005; Revised for Winter 2017 7 Rate-Based Recurrent etworks of Threshold eurons: Basis for Associative Memory 7.1 A recurrent network with threshold elements The
Physics 178/278 - David Kleinfeld - Fall 2005; Revised for Winter 2017 7 Rate-Based Recurrent etworks of Threshold eurons: Basis for Associative Memory 7.1 A recurrent network with threshold elements The
CHAPTER 32: ELECTROMAGNETIC WAVES
 CHAPTER 32: ELECTROMAGNETIC WAVES For those of you who are interested, below are the differential, or point, form of the four Maxwell s equations we studied this semester. The version of Maxwell s equations
CHAPTER 32: ELECTROMAGNETIC WAVES For those of you who are interested, below are the differential, or point, form of the four Maxwell s equations we studied this semester. The version of Maxwell s equations
Introduction to Design of Experiments
 Introduction to Design of Experiments Jean-Marc Vincent and Arnaud Legrand Laboratory ID-IMAG MESCAL Project Universities of Grenoble {Jean-Marc.Vincent,Arnaud.Legrand}@imag.fr November 20, 2011 J.-M.
Introduction to Design of Experiments Jean-Marc Vincent and Arnaud Legrand Laboratory ID-IMAG MESCAL Project Universities of Grenoble {Jean-Marc.Vincent,Arnaud.Legrand}@imag.fr November 20, 2011 J.-M.
Mean-Motion Resonance and Formation of Kirkwood Gaps
 Yan Wang Project 1 PHYS 527 October 13, 2008 Mean-Motion Resonance and Formation of Kirkwood Gaps Introduction A histogram of the number of asteroids versus their distance from the Sun shows some distinct
Yan Wang Project 1 PHYS 527 October 13, 2008 Mean-Motion Resonance and Formation of Kirkwood Gaps Introduction A histogram of the number of asteroids versus their distance from the Sun shows some distinct
Chapter 11 - Sequences and Series
 Calculus and Analytic Geometry II Chapter - Sequences and Series. Sequences Definition. A sequence is a list of numbers written in a definite order, We call a n the general term of the sequence. {a, a
Calculus and Analytic Geometry II Chapter - Sequences and Series. Sequences Definition. A sequence is a list of numbers written in a definite order, We call a n the general term of the sequence. {a, a
Control Systems I. Lecture 4: Diagonalization, Modal Analysis, Intro to Feedback. Readings: Emilio Frazzoli
 Control Systems I Lecture 4: Diagonalization, Modal Analysis, Intro to Feedback Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 13, 2017 E. Frazzoli (ETH)
Control Systems I Lecture 4: Diagonalization, Modal Analysis, Intro to Feedback Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 13, 2017 E. Frazzoli (ETH)
September Math Course: First Order Derivative
 September Math Course: First Order Derivative Arina Nikandrova Functions Function y = f (x), where x is either be a scalar or a vector of several variables (x,..., x n ), can be thought of as a rule which
September Math Course: First Order Derivative Arina Nikandrova Functions Function y = f (x), where x is either be a scalar or a vector of several variables (x,..., x n ), can be thought of as a rule which
10 Shallow Water Models
 10 Shallow Water Models So far, we have studied the effects due to rotation and stratification in isolation. We then looked at the effects of rotation in a barotropic model, but what about if we add stratification
10 Shallow Water Models So far, we have studied the effects due to rotation and stratification in isolation. We then looked at the effects of rotation in a barotropic model, but what about if we add stratification
MTH101 Calculus And Analytical Geometry Lecture Wise Questions and Answers For Final Term Exam Preparation
 MTH101 Calculus And Analytical Geometry Lecture Wise Questions and Answers For Final Term Exam Preparation Lecture No 23 to 45 Complete and Important Question and answer 1. What is the difference between
MTH101 Calculus And Analytical Geometry Lecture Wise Questions and Answers For Final Term Exam Preparation Lecture No 23 to 45 Complete and Important Question and answer 1. What is the difference between
Chapter 6 Nonlinear Systems and Phenomena. Friday, November 2, 12
 Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
Final 09/14/2017. Notes and electronic aids are not allowed. You must be seated in your assigned row for your exam to be valid.
 Final 09/4/207 Name: Problems -5 are each worth 8 points. Problem 6 is a bonus for up to 4 points. So a full score is 40 points and the max score is 44 points. The exam has 6 pages; make sure you have
Final 09/4/207 Name: Problems -5 are each worth 8 points. Problem 6 is a bonus for up to 4 points. So a full score is 40 points and the max score is 44 points. The exam has 6 pages; make sure you have
September 16, 2004 The NEURON Book: Chapter 2
 Chapter 2 The ing perspective This and the following chapter deal with concepts that are not NEURON-specific but instead pertain equally well to any tools used for neural ing. Why? In order to achieve
Chapter 2 The ing perspective This and the following chapter deal with concepts that are not NEURON-specific but instead pertain equally well to any tools used for neural ing. Why? In order to achieve
What is Q? Interpretation 1: Suppose A 0 represents wave amplitudes, then
 What is Q? Interpretation 1: Suppose A 0 represents wave amplitudes, then A = A 0 e bt = A 0 e ω 0 t /(2Q ) ln(a) ln(a) = ln(a 0 ) ω0 t 2Q intercept slope t Interpretation 2: Suppose u represents displacement,
What is Q? Interpretation 1: Suppose A 0 represents wave amplitudes, then A = A 0 e bt = A 0 e ω 0 t /(2Q ) ln(a) ln(a) = ln(a 0 ) ω0 t 2Q intercept slope t Interpretation 2: Suppose u represents displacement,
Consider the following spike trains from two different neurons N1 and N2:
 About synchrony and oscillations So far, our discussions have assumed that we are either observing a single neuron at a, or that neurons fire independent of each other. This assumption may be correct in
About synchrony and oscillations So far, our discussions have assumed that we are either observing a single neuron at a, or that neurons fire independent of each other. This assumption may be correct in
Chapter 9: The Perceptron
 Chapter 9: The Perceptron 9.1 INTRODUCTION At this point in the book, we have completed all of the exercises that we are going to do with the James program. These exercises have shown that distributed
Chapter 9: The Perceptron 9.1 INTRODUCTION At this point in the book, we have completed all of the exercises that we are going to do with the James program. These exercises have shown that distributed
Lecture - 30 Stationary Processes
 Probability and Random Variables Prof. M. Chakraborty Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur Lecture - 30 Stationary Processes So,
Probability and Random Variables Prof. M. Chakraborty Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur Lecture - 30 Stationary Processes So,
8 Example 1: The van der Pol oscillator (Strogatz Chapter 7)
") 8 Example 1: The van der Pol oscillator (Strogatz Chapter 7) So far we have seen some different possibilities of what can happen in two-dimensional systems (local and global attractors and bifurcations)
8 Example 1: The van der Pol oscillator (Strogatz Chapter 7) So far we have seen some different possibilities of what can happen in two-dimensional systems (local and global attractors and bifurcations)
Study on Nonlinear Perpendicular Flux Observer for Direct-torque-controlled Induction Motor
 ISSN 1749-3889 (print), 1749-3897 (online) International Journal of Nonlinear Science Vol.6(2008) No.1,pp.73-78 Study on Nonlinear Perpendicular Flux Observer for Direct-torque-controlled Induction Motor
ISSN 1749-3889 (print), 1749-3897 (online) International Journal of Nonlinear Science Vol.6(2008) No.1,pp.73-78 Study on Nonlinear Perpendicular Flux Observer for Direct-torque-controlled Induction Motor
Special Theory of Relativity. PH101 Lec-2
 Special Theory of Relativity PH101 Lec-2 Newtonian Relativity! The transformation laws are essential if we are to compare the mathematical statements of the laws of physics in different inertial reference
Special Theory of Relativity PH101 Lec-2 Newtonian Relativity! The transformation laws are essential if we are to compare the mathematical statements of the laws of physics in different inertial reference
Lecture 6: Control Problems and Solutions. CS 344R: Robotics Benjamin Kuipers
 Lecture 6: Control Problems and Solutions CS 344R: Robotics Benjamin Kuipers But First, Assignment 1: Followers A follower is a control law where the robot moves forward while keeping some error term small.
Lecture 6: Control Problems and Solutions CS 344R: Robotics Benjamin Kuipers But First, Assignment 1: Followers A follower is a control law where the robot moves forward while keeping some error term small.
Vectors a vector is a quantity that has both a magnitude (size) and a direction
 and a direction") Vectors In physics, a vector is a quantity that has both a magnitude (size) and a direction. Familiar examples of vectors include velocity, force, and electric field. For any applications beyond one dimension,
Vectors In physics, a vector is a quantity that has both a magnitude (size) and a direction. Familiar examples of vectors include velocity, force, and electric field. For any applications beyond one dimension,
SUPPLEMENTARY INFORMATION
 Mechanism of phototaxis in marine zooplankton: Description of the model 1 Mathematical Model We describe here a model of a swimming Platynereis larva. The larva is selfpropelled by ciliated cells located
Mechanism of phototaxis in marine zooplankton: Description of the model 1 Mathematical Model We describe here a model of a swimming Platynereis larva. The larva is selfpropelled by ciliated cells located
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for COMPUTATIONAL BIOLOGY A. COURSE CODES: FFR 110, FIM740GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for COMPUTATIONAL BIOLOGY A COURSE CODES: FFR 110, FIM740GU, PhD Time: Place: Teachers: Allowed material: Not allowed: June 8, 2018, at 08 30 12 30 Johanneberg Kristian
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for COMPUTATIONAL BIOLOGY A COURSE CODES: FFR 110, FIM740GU, PhD Time: Place: Teachers: Allowed material: Not allowed: June 8, 2018, at 08 30 12 30 Johanneberg Kristian
DON T PANIC! If you get stuck, take a deep breath and go on to the next question. Come back to the question you left if you have time at the end.
 Math 307, Midterm 2 Winter 2013 Name: Instructions. DON T PANIC! If you get stuck, take a deep breath and go on to the next question. Come back to the question you left if you have time at the end. There
Math 307, Midterm 2 Winter 2013 Name: Instructions. DON T PANIC! If you get stuck, take a deep breath and go on to the next question. Come back to the question you left if you have time at the end. There
Exercises. Chapter 1. of τ approx that produces the most accurate estimate for this firing pattern.
 1 Exercises Chapter 1 1. Generate spike sequences with a constant firing rate r 0 using a Poisson spike generator. Then, add a refractory period to the model by allowing the firing rate r(t) to depend
1 Exercises Chapter 1 1. Generate spike sequences with a constant firing rate r 0 using a Poisson spike generator. Then, add a refractory period to the model by allowing the firing rate r(t) to depend
(Refer Slide Time: 0:35)
") Fluid Dynamics And Turbo Machines. Professor Dr Shamit Bakshi. Department Of Mechanical Engineering. Indian Institute Of Technology Madras. Part A. Module-1. Lecture-4. Tutorial. (Refer Slide Time: 0:35)
Fluid Dynamics And Turbo Machines. Professor Dr Shamit Bakshi. Department Of Mechanical Engineering. Indian Institute Of Technology Madras. Part A. Module-1. Lecture-4. Tutorial. (Refer Slide Time: 0:35)
Nonlinear Observer Design and Synchronization Analysis for Classical Models of Neural Oscillators
 Nonlinear Observer Design and Synchronization Analysis for Classical Models of Neural Oscillators Ranjeetha Bharath and Jean-Jacques Slotine Massachusetts Institute of Technology ABSTRACT This work explores
Nonlinear Observer Design and Synchronization Analysis for Classical Models of Neural Oscillators Ranjeetha Bharath and Jean-Jacques Slotine Massachusetts Institute of Technology ABSTRACT This work explores
MATH 241 Practice Second Midterm Exam - Fall 2012
 MATH 41 Practice Second Midterm Exam - Fall 1 1. Let f(x = { 1 x for x 1 for 1 x (a Compute the Fourier sine series of f(x. The Fourier sine series is b n sin where b n = f(x sin dx = 1 = (1 x cos = 4
MATH 41 Practice Second Midterm Exam - Fall 1 1. Let f(x = { 1 x for x 1 for 1 x (a Compute the Fourier sine series of f(x. The Fourier sine series is b n sin where b n = f(x sin dx = 1 = (1 x cos = 4
APPENDIX: TRANSMISSION LINE MODELLING AND PORT-BASED CIRCUITS
 APPENDIX: TRANSMISSION LINE MODELLING AND PORT-BASED CIRCUITS A. MODELLING TRANSMISSION LINES THROUGH CIRCUITS In Chapter 5 we introduced the so-called basic rule for modelling circuital systems through
APPENDIX: TRANSMISSION LINE MODELLING AND PORT-BASED CIRCUITS A. MODELLING TRANSMISSION LINES THROUGH CIRCUITS In Chapter 5 we introduced the so-called basic rule for modelling circuital systems through
Discrete and Indiscrete Models of Biological Networks
 Discrete and Indiscrete Models of Biological Networks Winfried Just Ohio University November 17, 2010 Who are we? What are we doing here? Who are we? What are we doing here? A population of interacting
Discrete and Indiscrete Models of Biological Networks Winfried Just Ohio University November 17, 2010 Who are we? What are we doing here? Who are we? What are we doing here? A population of interacting
Drude theory & linear response
 DRAFT: run through L A TEX on 9 May 16 at 13:51 Drude theory & linear response 1 Static conductivity According to classical mechanics, the motion of a free electron in a constant E field obeys the Newton
DRAFT: run through L A TEX on 9 May 16 at 13:51 Drude theory & linear response 1 Static conductivity According to classical mechanics, the motion of a free electron in a constant E field obeys the Newton
Design and Optimization of Energy Systems Prof. C. Balaji Department of Mechanical Engineering Indian Institute of Technology, Madras
 Design and Optimization of Energy Systems Prof. C. Balaji Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 09 Newton-Raphson Method Contd We will continue with our
Design and Optimization of Energy Systems Prof. C. Balaji Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 09 Newton-Raphson Method Contd We will continue with our
Neocortical Pyramidal Cells Can Control Signals to Post-Synaptic Cells Without Firing:
 Neocortical Pyramidal Cells Can Control Signals to Post-Synaptic Cells Without Firing: a model of the axonal plexus Erin Munro Department of Mathematics Boston University 4/14/2011 Gap junctions on pyramidal
Neocortical Pyramidal Cells Can Control Signals to Post-Synaptic Cells Without Firing: a model of the axonal plexus Erin Munro Department of Mathematics Boston University 4/14/2011 Gap junctions on pyramidal
Probability and Statistics
 Probability and Statistics Kristel Van Steen, PhD 2 Montefiore Institute - Systems and Modeling GIGA - Bioinformatics ULg kristel.vansteen@ulg.ac.be CHAPTER 4: IT IS ALL ABOUT DATA 4a - 1 CHAPTER 4: IT
Probability and Statistics Kristel Van Steen, PhD 2 Montefiore Institute - Systems and Modeling GIGA - Bioinformatics ULg kristel.vansteen@ulg.ac.be CHAPTER 4: IT IS ALL ABOUT DATA 4a - 1 CHAPTER 4: IT
3 Action Potentials - Brutal Approximations
 Physics 172/278 - David Kleinfeld - Fall 2004; Revised Winter 2015 3 Action Potentials - Brutal Approximations The Hodgkin-Huxley equations for the behavior of the action potential in squid, and similar
Physics 172/278 - David Kleinfeld - Fall 2004; Revised Winter 2015 3 Action Potentials - Brutal Approximations The Hodgkin-Huxley equations for the behavior of the action potential in squid, and similar
Where k = 1. The electric field produced by a point charge is given by
 Ch 21 review: 1. Electric charge: Electric charge is a property of a matter. There are two kinds of charges, positive and negative. Charges of the same sign repel each other. Charges of opposite sign attract.
Ch 21 review: 1. Electric charge: Electric charge is a property of a matter. There are two kinds of charges, positive and negative. Charges of the same sign repel each other. Charges of opposite sign attract.
7 Recurrent Networks of Threshold (Binary) Neurons: Basis for Associative Memory
 Neurons: Basis for Associative Memory") Physics 178/278 - David Kleinfeld - Winter 2019 7 Recurrent etworks of Threshold (Binary) eurons: Basis for Associative Memory 7.1 The network The basic challenge in associative networks, also referred
Physics 178/278 - David Kleinfeld - Winter 2019 7 Recurrent etworks of Threshold (Binary) eurons: Basis for Associative Memory 7.1 The network The basic challenge in associative networks, also referred
Supporting Online Material for
 www.sciencemag.org/cgi/content/full/319/5869/1543/dc1 Supporting Online Material for Synaptic Theory of Working Memory Gianluigi Mongillo, Omri Barak, Misha Tsodyks* *To whom correspondence should be addressed.
www.sciencemag.org/cgi/content/full/319/5869/1543/dc1 Supporting Online Material for Synaptic Theory of Working Memory Gianluigi Mongillo, Omri Barak, Misha Tsodyks* *To whom correspondence should be addressed.