Chris Elliott Flight Controls / Quantum Computing. Copyright 2015, Lockheed Martin Corporation. All rights reserved.
|
|
|
- Annice McDonald
- 5 years ago
- Views:
Transcription
1 On Example Models and Challenges Ahead for the Evaluation of Complex Cyber-Physical Systems with State of the Art Formal Methods V&V Research in Quantum Enabled V&V Technology June 9-11, 2015 Chris Elliott Flight Controls / Quantum Computing
2 Not Observable Late Defects Improved V&V Path Challenge to Quantify Savings wrt Non-Observable 2

3 Our Timeline to Optimize 3

 P9 P1 P8 P2 P7")
4 Motivation for New Tools Consider 9 Phases of Development (SSS, SRS, SDD, OFP, FT, etc) P9 P1 P8 P2 P7 P3 P6 P4 P5 4
5 Engineering Time [Hrs] Motivation for New Tools Assume a Crude Model for Level of Effort for Design Team Engineering Attention: Exponential as a function of Phase, p Attention ~ 2 p 1 expert focuses for a couple hours on given design at phase 1 Releases Design for Team Review Attention On Problem Increases) Phase III ~ 4 Phase IV ~ 8 Phase IX ~ 512 hours Designer Focuses on a Prelim Design for an Hour # Design Phase Total Iterations Flight Test Team 25 experts validate ~2 days of sorties 5
6 Engineering Time [Hrs] Motivation for New Tools Assume Anomaly Detection at Any Phase Reinitiates Process Back to the Preliminary Drawing Board Phase 1 Engineering Time Continues to Accumulate Through Anomaly Burndown Model Anomaly Detections at Each Phase to Understand Impact Nominal P1 SPAR P2 SPAR P3 SPAR P4 SPAR P5 SPAR P6 SPAR P7 SPAR P8 SPAR P9 SPAR # Design Phase Total Iterations 6
7 Engineering Time [Hrs] Product Delayed [Weeks] Engineering Time [Hrs] Engineering Time [Hrs] Engineering Time [Hrs] Motivation for New Tools Perfect P1 P2 P # Design Phase Total Iterations Finding SPARS in the final Design phases may nearly Double Costs! P4 P5 P6 P # Design Phase Total Iterations 500 P8 P9 FT SPAR Discovered! Anamoly Discovered at Phase # Notional time delay assuming quadratic growth in phase durations # Design Phase Total Iterations Anamoly Discovered at Phase # We Must Avoid Doc Brown s Alternate

8 Motivation for New Tools Advanced Systems: On Board Intelligence Real Time Adaptation New Sensor Technology Emerging Complexity Driving Need for Novel V&V Practice T-50 F-22 Prog-D JSF ISR Combat UAV Inter-System Communication & Dependencies UAV - Projected F-35 Est F-16 IDF YF-22 F-22 JSF CDA Block 60 System Complexity Exceeding Advancement of V&V Practice 8
9 Discussion Layout Quantum Enabled V&V Overview A Few Challenge Problems of Interest A Nonlinear Guidance Example Neural Networks Emergent Closed Loop Behavior Path Forward 9
10 Quantum Enabled V&V What is it? QVTrace*: This technology is a method for Software Verification & Validation using Quantum Computer Assisted Formal Methods. Requirements And Implementation (Software Code) Quantum V&V Classical Computation Defects (Bugs) Req/Code Inconsistency Report to Designer D-Wave Adiabatic Quantum Computer Who will use it? Target Users are System/Software Design Teams interested in: - Reducing development costs - Improving final product quality *Product Developed by Quantum Research Analytics 10


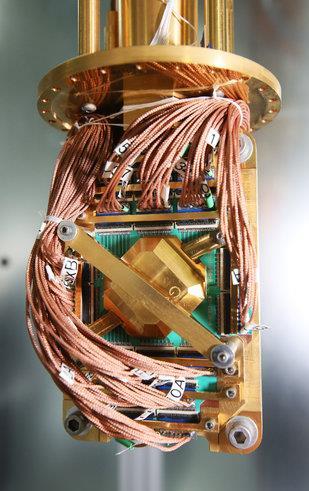
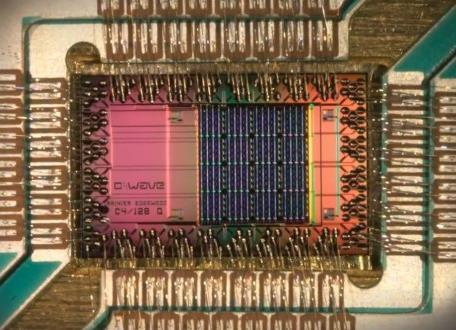
11 D-Wave Adiabatic Quantum Computer Current State-of-the-Art DW-2: 512-qubit Vesuvius Processor 11
12 Quantum Enabled V&V Overview Implementation Requirements SMT Instance False = Defect Space Satisfiability (All-SAT) Modulo Theory (Number Domain) Quantum Computer Ising (Binary Optimization) No Feasible? Consistent Yes Reqs/Implementation Defect Detected Inconsistency in Reqs/Implementation 12
13 Nonlinear Guidance Example Tangent Aim Point #1 Relative Position Vector to Tangent Aim Point #1 Standoff 1 UAV UAV Velocity Vector Relative Position Vector Relative Position Vector to Tangent Aim Point #2 Target Standoff 2 Target Velocity Vector Eta Plane Containing Relative Position and UAV Velocity Vector Tangent Aim Point #2 Derived from a 3D Collision Cone Approach used in a Reactive Obstacle Avoidance Paper, Reference [1] AIAA Chawla and Padhi Goal: Compute Aim Points as a function of Observed Positions and Velocities 13
14 Nonlinear Guidance Example X ap1 r 1 d u 1 V X TARGET X V X R r 2 X ap2 d u 2 Eta Plane Containing X R and V Ref [1] 14
15 Nonlinear Guidance Example Note Substituting into (1) Expanding (1) Writing Unit Vector in components of UAV Velocity and Relative Position Vector (2) (3) Ref [1] 15
16 Nonlinear Guidance Example Using (1) and (2), find Beta (1) (2) Recalling (3) Ref [1] 16

17 Nonlinear Guidance Example Continue to Solve for Beta, Ref [1] 17
18 Nonlinear Guidance Example Finally, unit vector and relative position vectors are found which allows computation of Aim Points Recall Ref [1] 18
19 Nonlinear Guidance Example Two Aim Points were Computed Which one is selected? Chawla and Padhi paper resolves UAV Velocity Vector into relative position components to choose more efficient collision avoidance. e.g. We desire a Counter Clockwise Loiter Interception for Surveillance off the Port Wing (CCW when viewing Ground Plane from above) Sign of k th component in cross product inspected for CCW rotation Ref [1] 19
20 Nonlinear Guidance Example Estimate UAV Velocity Vector and Magnitude Target Velocity Vector and Magnitude Compute Relative Position Standoff 1 and Standoff 2 Relative Position Vectors from Target Location Relative Position Vector to Tangent Aim Point #1 and Tangent Aim Point #2 Aim Point Resulting in CCW Standoff Loiter Rotation One Factor at a Time Approach ODE Solver Scope A Dynamic Target Reveals Abhorrent Behavior 20
 Iterate V")


 Formal Methods Powerful for Early")
21 Nonlinear Guidance Example Theory Model Experiment Derive Build Understand (OFAT, Formal Methods) Iterate V Max DRIVE2 LAT DRIVE2 LON Target Inertial Position TARGET Inner Loop, 1 st Order Airframe Approx MATLAB FUNCTION UNDER TEST Nonlinear Geometric Guidance FLY2 LAT FLY2 LON V Constant Outer Loop Psi Inner Loop, 1 st Order Airframe Approx UAV Inertial Position Air Vehicle Winds (Disturbance) Formal Methods Powerful for Early Designer s Arsenal 21
 Counter- Example Formal Methods Property")
22 Nonlinear Guidance Example Notional Requirement Theory Experiment Assess Mature Requirement Design Test Certify (Repeat) Counter- Example Formal Methods Property 22
 2-y Counter- Example Inputs Layer 1 Layer2 Output Formal Methods Property 23")
23 Neural Network Example Inputs Exhaustive Input Sweep 1-x ODE Solver Network Topology Positive Negative Scope Inspecting Output for Forward Analysis Not Always Trivial, Especially for Higher Order Systems e.g. (2D case depicted) 2-y Counter- Example Inputs Layer 1 Layer2 Output Formal Methods Property 23


24 Neural Network Example Is the NN output correctly bounded? Counter- Example Formal Methods Property Property Proving Exceeds Time Limit (5 mins) 24

25 Neural Network Example QVTRACE 25

26 Neural Network Example QVTRACE 26



27 Emergent Closed Loop Behaviors Wing Leveler Controller Φ Can Formal Methods Identify this Preliminary Design Flaw? 27
28 Path Forward LM Aero Developing Set of Examples to Evaluate and Improve Formal Methods Toolsets for Early-Design Phase Algorithms of Interest Involve: - Nonlinear Arithmetic - Real Number Data Types and Transcendental Functions - Vector and Matrix Operations - Complex State Machines - Heterogeneous Discrete Systems Goal is to Transition Formal Methods to Early-Design Teams CHRIS ELLIOTT, christopher.m.elliott@lmco.com,
29 29





30 State Machine Example 30
Quantum Computing Approach to V&V of Complex Systems Overview
 Quantum Computing Approach to V&V of Complex Systems Overview Summary of Quantum Enabled V&V Technology June, 04 Todd Belote Chris Elliott Flight Controls / VMS Integration Discussion Layout I. Quantum
Quantum Computing Approach to V&V of Complex Systems Overview Summary of Quantum Enabled V&V Technology June, 04 Todd Belote Chris Elliott Flight Controls / VMS Integration Discussion Layout I. Quantum
Cyber-Physical V&V Challenges for the Evaluation of State of the Art Model Checkers
 Cyber-Physical V&V Challenges for the Evaluation of State of the Art Model Checkers Research in Quantum Enabled V&V Technology July 12-14, 2016 Chris Elliott Flight Controls / Quantum Computing Overview
Cyber-Physical V&V Challenges for the Evaluation of State of the Art Model Checkers Research in Quantum Enabled V&V Technology July 12-14, 2016 Chris Elliott Flight Controls / Quantum Computing Overview
A Quantum Computing Approach to the Verification and Validation of Complex Cyber-Physical Systems
 A Quantum Computing Approach to the Verification and Validation of Complex Cyber-Physical Systems Achieving Quality and Cost Control in the Development of Enormous Systems Safe and Secure Systems and Software
A Quantum Computing Approach to the Verification and Validation of Complex Cyber-Physical Systems Achieving Quality and Cost Control in the Development of Enormous Systems Safe and Secure Systems and Software
LOCKHEED MARTIN SITE UPDATE
 LOCKHEED MARTIN SITE UPDATE 25 SEPTEMBER 2018 Julia Kwok Software Engineer Quantum Applications THE USC-LM QUANTUM COMPUTING CENTER Dr. Edward H. Ned Allen Chief Scientist and LM Senior Fellow Lockheed
LOCKHEED MARTIN SITE UPDATE 25 SEPTEMBER 2018 Julia Kwok Software Engineer Quantum Applications THE USC-LM QUANTUM COMPUTING CENTER Dr. Edward H. Ned Allen Chief Scientist and LM Senior Fellow Lockheed
Technology and Network Design Issues. Anna Nagurney Isenberg School of Management University of Massachusetts Amherst, MA 01003
 Technology and Network Design Issues Anna Nagurney Isenberg School of Management University of Massachusetts Amherst, MA 01003 c 2002 Introduction In this lecture, I explore technology and network design
Technology and Network Design Issues Anna Nagurney Isenberg School of Management University of Massachusetts Amherst, MA 01003 c 2002 Introduction In this lecture, I explore technology and network design
V&V of Complex Systems
 V&V of Complex Systems Bill Lanz and Hussein Youssef S5 Symposium- Beavercreek, OH June 14-16, 2011 1 Introduction Current methods of V&V, which certify that the software is fit for use, require a significant
V&V of Complex Systems Bill Lanz and Hussein Youssef S5 Symposium- Beavercreek, OH June 14-16, 2011 1 Introduction Current methods of V&V, which certify that the software is fit for use, require a significant
Formally Analyzing Adaptive Flight Control
 Formally Analyzing Adaptive Flight Control Ashish Tiwari SRI International 333 Ravenswood Ave Menlo Park, CA 94025 Supported in part by NASA IRAC NRA grant number: NNX08AB95A Ashish Tiwari Symbolic Verification
Formally Analyzing Adaptive Flight Control Ashish Tiwari SRI International 333 Ravenswood Ave Menlo Park, CA 94025 Supported in part by NASA IRAC NRA grant number: NNX08AB95A Ashish Tiwari Symbolic Verification
LOCKHEED MARTIN SITE UPDATE 11 APRIL 2018 MUNICH, GERMANY Kristen Pudenz Senior Quantum Applications Engineer
 LOCKHEED MARTIN SITE UPDATE 11 APRIL 2018 MUNICH, GERMANY Kristen Pudenz Senior Quantum Applications Engineer THE USC-LM QUANTUM COMPUTING CENTER Dr. Edward H. Ned Allen Chief Scientist and LM Senior Fellow
LOCKHEED MARTIN SITE UPDATE 11 APRIL 2018 MUNICH, GERMANY Kristen Pudenz Senior Quantum Applications Engineer THE USC-LM QUANTUM COMPUTING CENTER Dr. Edward H. Ned Allen Chief Scientist and LM Senior Fellow
Chapter 11. Path Manager. Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 2012,
 Chapter 11 Path Manager Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 212, Chapter 11, Slide 1 Control Architecture destination, obstacles map path planner waypoints status path
Chapter 11 Path Manager Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 212, Chapter 11, Slide 1 Control Architecture destination, obstacles map path planner waypoints status path
Autopilot design for small fixed wing aerial vehicles. Randy Beard Brigham Young University
 Autopilot design for small fixed wing aerial vehicles Randy Beard Brigham Young University Outline Control architecture Low level autopilot loops Path following Dubins airplane paths and path management
Autopilot design for small fixed wing aerial vehicles Randy Beard Brigham Young University Outline Control architecture Low level autopilot loops Path following Dubins airplane paths and path management
Topic 17. Analysis of Algorithms
 Topic 17 Analysis of Algorithms Analysis of Algorithms- Review Efficiency of an algorithm can be measured in terms of : Time complexity: a measure of the amount of time required to execute an algorithm
Topic 17 Analysis of Algorithms Analysis of Algorithms- Review Efficiency of an algorithm can be measured in terms of : Time complexity: a measure of the amount of time required to execute an algorithm
ANALYZING REAL TIME LINEAR CONTROL SYSTEMS USING SOFTWARE VERIFICATION. Parasara Sridhar Duggirala UConn Mahesh Viswanathan UIUC
 ANALYZING REAL TIME LINEAR CONTROL SYSTEMS USING SOFTWARE VERIFICATION Parasara Sridhar Duggirala UConn Mahesh Viswanathan UIUC Real-Time Systems Linear Control Systems Verification Verification Control
ANALYZING REAL TIME LINEAR CONTROL SYSTEMS USING SOFTWARE VERIFICATION Parasara Sridhar Duggirala UConn Mahesh Viswanathan UIUC Real-Time Systems Linear Control Systems Verification Verification Control
Formal Verification Techniques. Riccardo Sisto, Politecnico di Torino
 Formal Verification Techniques Riccardo Sisto, Politecnico di Torino State exploration State Exploration and Theorem Proving Exhaustive exploration => result is certain (correctness or noncorrectness proof)
Formal Verification Techniques Riccardo Sisto, Politecnico di Torino State exploration State Exploration and Theorem Proving Exhaustive exploration => result is certain (correctness or noncorrectness proof)
Aerodynamics and Flight Mechanics
 Aerodynamics and Flight Mechanics Principal Investigator: Mike Bragg Eric Loth Post Doc s: Graduate Students: Undergraduate Students: Sam Lee Jason Merret Kishwar Hossain Edward Whalen Chris Lamarre Leia
Aerodynamics and Flight Mechanics Principal Investigator: Mike Bragg Eric Loth Post Doc s: Graduate Students: Undergraduate Students: Sam Lee Jason Merret Kishwar Hossain Edward Whalen Chris Lamarre Leia
Trajectory tracking & Path-following control
 Cooperative Control of Multiple Robotic Vehicles: Theory and Practice Trajectory tracking & Path-following control EECI Graduate School on Control Supélec, Feb. 21-25, 2011 A word about T Tracking and
Cooperative Control of Multiple Robotic Vehicles: Theory and Practice Trajectory tracking & Path-following control EECI Graduate School on Control Supélec, Feb. 21-25, 2011 A word about T Tracking and
STAT T&E COE-Report Reliability Test Planning for Mean Time Between Failures. Best Practice. Authored by: Jennifer Kensler, PhD STAT T&E COE
 Reliability est Planning for Mean ime Between Failures Best Practice Authored by: Jennifer Kensler, PhD SA &E COE March 21, 2014 he goal of the SA &E COE is to assist in developing rigorous, defensible
Reliability est Planning for Mean ime Between Failures Best Practice Authored by: Jennifer Kensler, PhD SA &E COE March 21, 2014 he goal of the SA &E COE is to assist in developing rigorous, defensible
Biologically inspired sensor fusion for real-time wind gust estimation in autonomous UAV navigation
 Biologically inspired sensor fusion for real-time wind gust estimation in autonomous UAV navigation Reliability and accuracy of navigation in flying drones are one of the key challenges that must be solved
Biologically inspired sensor fusion for real-time wind gust estimation in autonomous UAV navigation Reliability and accuracy of navigation in flying drones are one of the key challenges that must be solved
Full Scale Structural Durability Test Spectrum Reduction by Truncation Coupon Testing
 Full Scale Structural Durability Test Spectrum Reduction by Truncation Coupon Testing Ogewu C. Agbese F-16/F-22 IFG Service Life Analysis Lockheed Martin Aeronautics Fort Worth, TX, USA ogewu.c.agbese@lmco.com
Full Scale Structural Durability Test Spectrum Reduction by Truncation Coupon Testing Ogewu C. Agbese F-16/F-22 IFG Service Life Analysis Lockheed Martin Aeronautics Fort Worth, TX, USA ogewu.c.agbese@lmco.com
Overview. Discrete Event Systems Verification of Finite Automata. What can finite automata be used for? What can finite automata be used for?
 Computer Engineering and Networks Overview Discrete Event Systems Verification of Finite Automata Lothar Thiele Introduction Binary Decision Diagrams Representation of Boolean Functions Comparing two circuits
Computer Engineering and Networks Overview Discrete Event Systems Verification of Finite Automata Lothar Thiele Introduction Binary Decision Diagrams Representation of Boolean Functions Comparing two circuits
Measures of relative complexity
 Measures of relative complexity George Barmpalias Institute of Software Chinese Academy of Sciences and Visiting Fellow at the Isaac Newton Institute for the Mathematical Sciences Newton Institute, January
Measures of relative complexity George Barmpalias Institute of Software Chinese Academy of Sciences and Visiting Fellow at the Isaac Newton Institute for the Mathematical Sciences Newton Institute, January
Delayed and Higher-Order Transfer Entropy
 Delayed and Higher-Order Transfer Entropy Michael Hansen (April 23, 2011) Background Transfer entropy (TE) is an information-theoretic measure of directed information flow introduced by Thomas Schreiber
Delayed and Higher-Order Transfer Entropy Michael Hansen (April 23, 2011) Background Transfer entropy (TE) is an information-theoretic measure of directed information flow introduced by Thomas Schreiber
Aircraft Flight Dynamics Robert Stengel MAE 331, Princeton University, 2018
 Aircraft Flight Dynamics Robert Stengel MAE 331, Princeton University, 2018 Course Overview Introduction to Flight Dynamics Math Preliminaries Copyright 2018 by Robert Stengel. All rights reserved. For
Aircraft Flight Dynamics Robert Stengel MAE 331, Princeton University, 2018 Course Overview Introduction to Flight Dynamics Math Preliminaries Copyright 2018 by Robert Stengel. All rights reserved. For
Stability and Stabilization of polynomial dynamical systems. Hadi Ravanbakhsh Sriram Sankaranarayanan University of Colorado, Boulder
 Stability and Stabilization of polynomial dynamical systems Hadi Ravanbakhsh Sriram Sankaranarayanan University of Colorado, Boulder Proving Asymptotic Stability: Lyapunov Functions Lyapunov Function:
Stability and Stabilization of polynomial dynamical systems Hadi Ravanbakhsh Sriram Sankaranarayanan University of Colorado, Boulder Proving Asymptotic Stability: Lyapunov Functions Lyapunov Function:
Scalable and Accurate Verification of Data Flow Systems. Cesare Tinelli The University of Iowa
 Scalable and Accurate Verification of Data Flow Systems Cesare Tinelli The University of Iowa Overview AFOSR Supported Research Collaborations NYU (project partner) Chalmers University (research collaborator)
Scalable and Accurate Verification of Data Flow Systems Cesare Tinelli The University of Iowa Overview AFOSR Supported Research Collaborations NYU (project partner) Chalmers University (research collaborator)
Space Surveillance with Star Trackers. Part II: Orbit Estimation
 AAS -3 Space Surveillance with Star Trackers. Part II: Orbit Estimation Ossama Abdelkhalik, Daniele Mortari, and John L. Junkins Texas A&M University, College Station, Texas 7783-3 Abstract The problem
AAS -3 Space Surveillance with Star Trackers. Part II: Orbit Estimation Ossama Abdelkhalik, Daniele Mortari, and John L. Junkins Texas A&M University, College Station, Texas 7783-3 Abstract The problem
Estimation of Wind Velocity on Flexible Unmanned Aerial Vehicle Without Aircraft Parameters
 McNair Scholars Research Journal Volume 5 Article 3 2018 Estimation of Wind Velocity on Flexible Unmanned Aerial Vehicle Without Aircraft Parameters Noel J. Mangual Embry-Riddle Aeronautical University
McNair Scholars Research Journal Volume 5 Article 3 2018 Estimation of Wind Velocity on Flexible Unmanned Aerial Vehicle Without Aircraft Parameters Noel J. Mangual Embry-Riddle Aeronautical University
Route-Planning for Real-Time Safety-Assured Autonomous Aircraft (RTS3A)
") Route-Planning for Real-Time Safety-Assured Autonomous Aircraft (RTS3A) Raghvendra V. Cowlagi 1 Jeffrey T. Chambers 2 Nikola Baltadjiev 2 1 Worcester Polytechnic Institute, Worcester, MA. 2 Aurora Flight
Route-Planning for Real-Time Safety-Assured Autonomous Aircraft (RTS3A) Raghvendra V. Cowlagi 1 Jeffrey T. Chambers 2 Nikola Baltadjiev 2 1 Worcester Polytechnic Institute, Worcester, MA. 2 Aurora Flight
ONR MURI AIRFOILS: Animal Inspired Robust Flight with Outer and Inner Loop Strategies. Calin Belta
 ONR MURI AIRFOILS: Animal Inspired Robust Flight with Outer and Inner Loop Strategies Provable safety for animal inspired agile flight Calin Belta Hybrid and Networked Systems (HyNeSs) Lab Department of
ONR MURI AIRFOILS: Animal Inspired Robust Flight with Outer and Inner Loop Strategies Provable safety for animal inspired agile flight Calin Belta Hybrid and Networked Systems (HyNeSs) Lab Department of
An analysis of how coupling parameters influence nonlinear oscillator synchronization
 An analysis of how coupling parameters influence nonlinear oscillator synchronization Morris Huang, 1 Ben McInroe, 2 Mark Kingsbury, 2 and Will Wagstaff 3 1) School of Mechanical Engineering, Georgia Institute
An analysis of how coupling parameters influence nonlinear oscillator synchronization Morris Huang, 1 Ben McInroe, 2 Mark Kingsbury, 2 and Will Wagstaff 3 1) School of Mechanical Engineering, Georgia Institute
Qubits qop Tools Directions
 Qubits qop Tools Directions Steve Reinhardt Director of Software Tools D-Wave Systems The qop goals are to establish key abstractions that are valuable for applications and higherlevel tools and effectively
Qubits qop Tools Directions Steve Reinhardt Director of Software Tools D-Wave Systems The qop goals are to establish key abstractions that are valuable for applications and higherlevel tools and effectively
Bounded Model Checking with SAT/SMT. Edmund M. Clarke School of Computer Science Carnegie Mellon University 1/39
 Bounded Model Checking with SAT/SMT Edmund M. Clarke School of Computer Science Carnegie Mellon University 1/39 Recap: Symbolic Model Checking with BDDs Method used by most industrial strength model checkers:
Bounded Model Checking with SAT/SMT Edmund M. Clarke School of Computer Science Carnegie Mellon University 1/39 Recap: Symbolic Model Checking with BDDs Method used by most industrial strength model checkers:
Sample questions for Fundamentals of Machine Learning 2018
 Sample questions for Fundamentals of Machine Learning 2018 Teacher: Mohammad Emtiyaz Khan A few important informations: In the final exam, no electronic devices are allowed except a calculator. Make sure
Sample questions for Fundamentals of Machine Learning 2018 Teacher: Mohammad Emtiyaz Khan A few important informations: In the final exam, no electronic devices are allowed except a calculator. Make sure
Compressible Potential Flow: The Full Potential Equation. Copyright 2009 Narayanan Komerath
 Compressible Potential Flow: The Full Potential Equation 1 Introduction Recall that for incompressible flow conditions, velocity is not large enough to cause density changes, so density is known. Thus
Compressible Potential Flow: The Full Potential Equation 1 Introduction Recall that for incompressible flow conditions, velocity is not large enough to cause density changes, so density is known. Thus
Aerodynamics and Flight Mechanics
 Aerodynamics and Flight Mechanics Principal Investigator: Mike Bragg, Eric Loth Post Doc s: Andy Broeren, Sam Lee Graduate Students: Holly Gurbachi(CRI), Tim Hutchison, Devesh Pokhariyal, Ryan Oltman,
Aerodynamics and Flight Mechanics Principal Investigator: Mike Bragg, Eric Loth Post Doc s: Andy Broeren, Sam Lee Graduate Students: Holly Gurbachi(CRI), Tim Hutchison, Devesh Pokhariyal, Ryan Oltman,
Computation. Some history...
 Computation Motivating questions: What does computation mean? What are the similarities and differences between computation in computers and in natural systems? What are the limits of computation? Are
Computation Motivating questions: What does computation mean? What are the similarities and differences between computation in computers and in natural systems? What are the limits of computation? Are
Advanced Adaptive Control for Unintended System Behavior
 Advanced Adaptive Control for Unintended System Behavior Dr. Chengyu Cao Mechanical Engineering University of Connecticut ccao@engr.uconn.edu jtang@engr.uconn.edu Outline Part I: Challenges: Unintended
Advanced Adaptive Control for Unintended System Behavior Dr. Chengyu Cao Mechanical Engineering University of Connecticut ccao@engr.uconn.edu jtang@engr.uconn.edu Outline Part I: Challenges: Unintended
Quantum Annealing with continuous variables: Low-Rank Matrix Factorization. Daniele Ottaviani CINECA. Alfonso Amendola ENI
 Quantum Annealing with continuous variables: Low-Rank Matrix Factorization Daniele Ottaviani CINECA Alfonso Amendola ENI Qubits Europe 2019 Milan, 25-27/03/2019 QUBO Problems with real variables We define
Quantum Annealing with continuous variables: Low-Rank Matrix Factorization Daniele Ottaviani CINECA Alfonso Amendola ENI Qubits Europe 2019 Milan, 25-27/03/2019 QUBO Problems with real variables We define
Hoare Logic I. Introduction to Deductive Program Verification. Simple Imperative Programming Language. Hoare Logic. Meaning of Hoare Triples
 Hoare Logic I Introduction to Deductive Program Verification Işıl Dillig Program Spec Deductive verifier FOL formula Theorem prover valid contingent Example specs: safety (no crashes), absence of arithmetic
Hoare Logic I Introduction to Deductive Program Verification Işıl Dillig Program Spec Deductive verifier FOL formula Theorem prover valid contingent Example specs: safety (no crashes), absence of arithmetic
Robust Model Predictive Control for Autonomous Vehicle/Self-Driving Cars
 Robust Model Predictive Control for Autonomous Vehicle/Self-Driving Cars Che Kun Law, Darshit Dalal, Stephen Shearrow A robust Model Predictive Control (MPC) approach for controlling front steering of
Robust Model Predictive Control for Autonomous Vehicle/Self-Driving Cars Che Kun Law, Darshit Dalal, Stephen Shearrow A robust Model Predictive Control (MPC) approach for controlling front steering of
Numerical Weather prediction at the European Centre for Medium-Range Weather Forecasts
 Numerical Weather prediction at the European Centre for Medium-Range Weather Forecasts Time series curves 500hPa geopotential Correlation coefficent of forecast anomaly N Hemisphere Lat 20.0 to 90.0 Lon
Numerical Weather prediction at the European Centre for Medium-Range Weather Forecasts Time series curves 500hPa geopotential Correlation coefficent of forecast anomaly N Hemisphere Lat 20.0 to 90.0 Lon
Determining the Existence of DC Operating Points in Circuits
 Determining the Existence of DC Operating Points in Circuits Mohamed Zaki Department of Computer Science, University of British Columbia Joint work with Ian Mitchell and Mark Greenstreet Nov 23 nd, 2009
Determining the Existence of DC Operating Points in Circuits Mohamed Zaki Department of Computer Science, University of British Columbia Joint work with Ian Mitchell and Mark Greenstreet Nov 23 nd, 2009
AN INTRODUCTION TO NEURAL NETWORKS. Scott Kuindersma November 12, 2009
 AN INTRODUCTION TO NEURAL NETWORKS Scott Kuindersma November 12, 2009 SUPERVISED LEARNING We are given some training data: We must learn a function If y is discrete, we call it classification If it is
AN INTRODUCTION TO NEURAL NETWORKS Scott Kuindersma November 12, 2009 SUPERVISED LEARNING We are given some training data: We must learn a function If y is discrete, we call it classification If it is
Nonlinear Wind Estimator Based on Lyapunov
 Nonlinear Based on Lyapunov Techniques Pedro Serra ISR/DSOR July 7, 2010 Pedro Serra Nonlinear 1/22 Outline 1 Motivation Problem 2 Aircraft Dynamics Guidance Control and Navigation structure Guidance Dynamics
Nonlinear Based on Lyapunov Techniques Pedro Serra ISR/DSOR July 7, 2010 Pedro Serra Nonlinear 1/22 Outline 1 Motivation Problem 2 Aircraft Dynamics Guidance Control and Navigation structure Guidance Dynamics
CS 700: Quantitative Methods & Experimental Design in Computer Science
 CS 700: Quantitative Methods & Experimental Design in Computer Science Sanjeev Setia Dept of Computer Science George Mason University Logistics Grade: 35% project, 25% Homework assignments 20% midterm,
CS 700: Quantitative Methods & Experimental Design in Computer Science Sanjeev Setia Dept of Computer Science George Mason University Logistics Grade: 35% project, 25% Homework assignments 20% midterm,
KENDRIYA VIDYALAYA SANGATHAN, HYDERABAD REGION
 KENDRIYA VIDYALAYA SANGATHAN, HYDERABAD REGION SAMPLE PAPER 07 (017-18) SUBJECT: MATHEMATICS(041) BLUE PRINT : CLASS X Unit Chapter VSA (1 mark) SA I ( marks) SA II (3 marks) LA (4 marks) Total Unit Total
KENDRIYA VIDYALAYA SANGATHAN, HYDERABAD REGION SAMPLE PAPER 07 (017-18) SUBJECT: MATHEMATICS(041) BLUE PRINT : CLASS X Unit Chapter VSA (1 mark) SA I ( marks) SA II (3 marks) LA (4 marks) Total Unit Total
arxiv: v1 [quant-ph] 29 Apr 2010
![arxiv: v1 [quant-ph] 29 Apr 2010](/thumbs/73/68632646.jpg "arxiv: v1 [quant-ph] 29 Apr 2010") Minimal memory requirements for pearl necklace encoders of quantum convolutional codes arxiv:004.579v [quant-ph] 29 Apr 200 Monireh Houshmand and Saied Hosseini-Khayat Department of Electrical Engineering,
Minimal memory requirements for pearl necklace encoders of quantum convolutional codes arxiv:004.579v [quant-ph] 29 Apr 200 Monireh Houshmand and Saied Hosseini-Khayat Department of Electrical Engineering,
LOGIC PROPOSITIONAL REASONING
 LOGIC PROPOSITIONAL REASONING WS 2017/2018 (342.208) Armin Biere Martina Seidl biere@jku.at martina.seidl@jku.at Institute for Formal Models and Verification Johannes Kepler Universität Linz Version 2018.1
LOGIC PROPOSITIONAL REASONING WS 2017/2018 (342.208) Armin Biere Martina Seidl biere@jku.at martina.seidl@jku.at Institute for Formal Models and Verification Johannes Kepler Universität Linz Version 2018.1
Lecture 6. Notes on Linear Algebra. Perceptron
 Lecture 6. Notes on Linear Algebra. Perceptron COMP90051 Statistical Machine Learning Semester 2, 2017 Lecturer: Andrey Kan Copyright: University of Melbourne This lecture Notes on linear algebra Vectors
Lecture 6. Notes on Linear Algebra. Perceptron COMP90051 Statistical Machine Learning Semester 2, 2017 Lecturer: Andrey Kan Copyright: University of Melbourne This lecture Notes on linear algebra Vectors
Propositional Logic: Evaluating the Formulas
 Institute for Formal Models and Verification Johannes Kepler University Linz VL Logik (LVA-Nr. 342208) Winter Semester 2015/2016 Propositional Logic: Evaluating the Formulas Version 2015.2 Armin Biere
Institute for Formal Models and Verification Johannes Kepler University Linz VL Logik (LVA-Nr. 342208) Winter Semester 2015/2016 Propositional Logic: Evaluating the Formulas Version 2015.2 Armin Biere
Machine Learning for Software Engineering
 Machine Learning for Software Engineering Dimensionality Reduction Prof. Dr.-Ing. Norbert Siegmund Intelligent Software Systems 1 2 Exam Info Scheduled for Tuesday 25 th of July 11-13h (same time as the
Machine Learning for Software Engineering Dimensionality Reduction Prof. Dr.-Ing. Norbert Siegmund Intelligent Software Systems 1 2 Exam Info Scheduled for Tuesday 25 th of July 11-13h (same time as the
TDT4173 Machine Learning
 TDT4173 Machine Learning Lecture 3 Bagging & Boosting + SVMs Norwegian University of Science and Technology Helge Langseth IT-VEST 310 helgel@idi.ntnu.no 1 TDT4173 Machine Learning Outline 1 Ensemble-methods
TDT4173 Machine Learning Lecture 3 Bagging & Boosting + SVMs Norwegian University of Science and Technology Helge Langseth IT-VEST 310 helgel@idi.ntnu.no 1 TDT4173 Machine Learning Outline 1 Ensemble-methods
Module 7. Software Engineering Issues. Version 2 EE IIT, Kharagpur 1
 Module 7 Software Engineering Issues Version 2 EE IIT, Kharagpur 1 Lesson 35 Modelling Timing Constraints Version 2 EE IIT, Kharagpur 2 Specific Instructional Objectives At the end of this lesson, the
Module 7 Software Engineering Issues Version 2 EE IIT, Kharagpur 1 Lesson 35 Modelling Timing Constraints Version 2 EE IIT, Kharagpur 2 Specific Instructional Objectives At the end of this lesson, the
Aircraft Flight Dynamics!
 Aircraft Flight Dynamics Robert Stengel MAE 331, Princeton University, 2016 Course Overview Introduction to Flight Dynamics Math Preliminaries Copyright 2016 by Robert Stengel. All rights reserved. For
Aircraft Flight Dynamics Robert Stengel MAE 331, Princeton University, 2016 Course Overview Introduction to Flight Dynamics Math Preliminaries Copyright 2016 by Robert Stengel. All rights reserved. For
Lesson Rigid Body Dynamics
 Lesson 8 Rigid Body Dynamics Lesson 8 Outline Problem definition and motivations Dynamics of rigid bodies The equation of unconstrained motion (ODE) User and time control Demos / tools / libs Rigid Body
Lesson 8 Rigid Body Dynamics Lesson 8 Outline Problem definition and motivations Dynamics of rigid bodies The equation of unconstrained motion (ODE) User and time control Demos / tools / libs Rigid Body
Testing System Conformance for Cyber-Physical Systems
 Testing System Conformance for Cyber-Physical Systems Testing systems by walking the dog Rupak Majumdar Max Planck Institute for Software Systems Joint work with Vinayak Prabhu (MPI-SWS) and Jyo Deshmukh
Testing System Conformance for Cyber-Physical Systems Testing systems by walking the dog Rupak Majumdar Max Planck Institute for Software Systems Joint work with Vinayak Prabhu (MPI-SWS) and Jyo Deshmukh
Q 1. Richland School District Two 8th Grade Mathematics Pacing Guide. Last Edit: 1/17/17
 Overview of Units Pacing Guide Standards and Indicators Suggested Days Q 1 1-2 Unit 1: Geometry and Measurement: Transformations in the Plane Congruence: - Translations - Reflections - Rotations - Congruent
Overview of Units Pacing Guide Standards and Indicators Suggested Days Q 1 1-2 Unit 1: Geometry and Measurement: Transformations in the Plane Congruence: - Translations - Reflections - Rotations - Congruent
Exercises Stochastic Performance Modelling. Hamilton Institute, Summer 2010
 Exercises Stochastic Performance Modelling Hamilton Institute, Summer Instruction Exercise Let X be a non-negative random variable with E[X ]
Exercises Stochastic Performance Modelling Hamilton Institute, Summer Instruction Exercise Let X be a non-negative random variable with E[X ]
Synthesizing from Components: Building from Blocks
 Synthesizing from Components: Building from Blocks Ashish Tiwari SRI International 333 Ravenswood Ave Menlo Park, CA 94025 Joint work with Sumit Gulwani (MSR), Vijay Anand Korthikanti (UIUC), Susmit Jha
Synthesizing from Components: Building from Blocks Ashish Tiwari SRI International 333 Ravenswood Ave Menlo Park, CA 94025 Joint work with Sumit Gulwani (MSR), Vijay Anand Korthikanti (UIUC), Susmit Jha
Adaptive Trim and Trajectory Following for a Tilt-Rotor Tricopter Ahmad Ansari, Anna Prach, and Dennis S. Bernstein
 7 American Control Conference Sheraton Seattle Hotel May 4 6, 7, Seattle, USA Adaptive Trim and Trajectory Following for a Tilt-Rotor Tricopter Ahmad Ansari, Anna Prach, and Dennis S. Bernstein Abstract
7 American Control Conference Sheraton Seattle Hotel May 4 6, 7, Seattle, USA Adaptive Trim and Trajectory Following for a Tilt-Rotor Tricopter Ahmad Ansari, Anna Prach, and Dennis S. Bernstein Abstract
Nonlinear Landing Control for Quadrotor UAVs
 Nonlinear Landing Control for Quadrotor UAVs Holger Voos University of Applied Sciences Ravensburg-Weingarten, Mobile Robotics Lab, D-88241 Weingarten Abstract. Quadrotor UAVs are one of the most preferred
Nonlinear Landing Control for Quadrotor UAVs Holger Voos University of Applied Sciences Ravensburg-Weingarten, Mobile Robotics Lab, D-88241 Weingarten Abstract. Quadrotor UAVs are one of the most preferred
cha1873x_p02.qxd 3/21/05 1:01 PM Page 104 PART TWO
 cha1873x_p02.qxd 3/21/05 1:01 PM Page 104 PART TWO ROOTS OF EQUATIONS PT2.1 MOTIVATION Years ago, you learned to use the quadratic formula x = b ± b 2 4ac 2a to solve f(x) = ax 2 + bx + c = 0 (PT2.1) (PT2.2)
cha1873x_p02.qxd 3/21/05 1:01 PM Page 104 PART TWO ROOTS OF EQUATIONS PT2.1 MOTIVATION Years ago, you learned to use the quadratic formula x = b ± b 2 4ac 2a to solve f(x) = ax 2 + bx + c = 0 (PT2.1) (PT2.2)
Abstract Interpretation with Higher-Dimensional Ellipsoids and Conic Extrapolation
 Abstract Interpretation with Higher-Dimensional Ellipsoids and Conic Extrapolation or potatoes & ice cream cones Mendes Oulamara, Arnaud Venet Computer Aided Verification, 2015 July 22, 2015 ÉCOLE NORMALE
Abstract Interpretation with Higher-Dimensional Ellipsoids and Conic Extrapolation or potatoes & ice cream cones Mendes Oulamara, Arnaud Venet Computer Aided Verification, 2015 July 22, 2015 ÉCOLE NORMALE
Using Theorem Provers to Guarantee Closed-Loop Properties
 Using Theorem Provers to Guarantee Closed-Loop Properties Nikos Aréchiga Sarah Loos André Platzer Bruce Krogh Carnegie Mellon University April 27, 2012 Aréchiga, Loos, Platzer, Krogh (CMU) Theorem Provers
Using Theorem Provers to Guarantee Closed-Loop Properties Nikos Aréchiga Sarah Loos André Platzer Bruce Krogh Carnegie Mellon University April 27, 2012 Aréchiga, Loos, Platzer, Krogh (CMU) Theorem Provers
APPENDIX TLE TWO-LINE ELEMENT TRACKING
 APPENDIX TLE TWO-LINE ELEMENT TRACKING Last Revised: 2 August 2012 This appendix is provided as a supplement to the baseline RC4000 manual and the inclined orbit tracking option appendix (Appendix TRK).
APPENDIX TLE TWO-LINE ELEMENT TRACKING Last Revised: 2 August 2012 This appendix is provided as a supplement to the baseline RC4000 manual and the inclined orbit tracking option appendix (Appendix TRK).
MathCheck2: Combining SAT and CAS Presentation at Applications of Computer Algebra 2016 Kassel, Germany
 MathCheck2: Combining SAT and CAS Presentation at Applications of Computer Algebra 2016 Kassel, Germany Curtis Bright, Vijay Ganesh, Albert Heinle, Ilias Kotsireas, Saeed Nejati, Krzysztof Czarnecki University
MathCheck2: Combining SAT and CAS Presentation at Applications of Computer Algebra 2016 Kassel, Germany Curtis Bright, Vijay Ganesh, Albert Heinle, Ilias Kotsireas, Saeed Nejati, Krzysztof Czarnecki University
1. Solutions to Systems of Linear Equations. Determine whether the ordered pairs are solutions to the system. x y 6. 3x y 2
 78 Chapter Sstems of Linear Equations Section. Concepts. Solutions to Sstems of Linear Equations. Dependent and Inconsistent Sstems of Linear Equations. Solving Sstems of Linear Equations b Graphing Solving
78 Chapter Sstems of Linear Equations Section. Concepts. Solutions to Sstems of Linear Equations. Dependent and Inconsistent Sstems of Linear Equations. Solving Sstems of Linear Equations b Graphing Solving
Pre-Algebra (8) Mathematics
 Mathematics") Scope And Sequence Timeframe Unit Instructional Topics 26 Day(s) 55 Day(s) 45 Day(s) 44 Day(s) Materials and Resources Glencoe McGraw-Hill Math Connects Course 3 Unit 1: Rational numbers, percent, real
Scope And Sequence Timeframe Unit Instructional Topics 26 Day(s) 55 Day(s) 45 Day(s) 44 Day(s) Materials and Resources Glencoe McGraw-Hill Math Connects Course 3 Unit 1: Rational numbers, percent, real
Combining SMT with Theorem Proving for AMS Verification
 1 / 21 Combining SMT with Theorem Proving for AMS Verification The best of both worlds Yan Peng & Mark Greenstreet University of British Columbia Vancouver, BC NASA Formal Methods Symposium, April 29,
1 / 21 Combining SMT with Theorem Proving for AMS Verification The best of both worlds Yan Peng & Mark Greenstreet University of British Columbia Vancouver, BC NASA Formal Methods Symposium, April 29,
Algorithmic verification
 Algorithmic verification Ahmed Rezine IDA, Linköpings Universitet Hösttermin 2018 Outline Overview Model checking Symbolic execution Outline Overview Model checking Symbolic execution Program verification
Algorithmic verification Ahmed Rezine IDA, Linköpings Universitet Hösttermin 2018 Outline Overview Model checking Symbolic execution Outline Overview Model checking Symbolic execution Program verification
AUTOMATIC CONTROL. Andrea M. Zanchettin, PhD Spring Semester, Introduction to Automatic Control & Linear systems (time domain)
") 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Spring Semester, 2018 Introduction to Automatic Control & Linear systems (time domain) 2 What is automatic control? From Wikipedia Control theory is an interdisciplinary
1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Spring Semester, 2018 Introduction to Automatic Control & Linear systems (time domain) 2 What is automatic control? From Wikipedia Control theory is an interdisciplinary
Lower bounds on the size of semidefinite relaxations. David Steurer Cornell
 Lower bounds on the size of semidefinite relaxations David Steurer Cornell James R. Lee Washington Prasad Raghavendra Berkeley Institute for Advanced Study, November 2015 overview of results unconditional
Lower bounds on the size of semidefinite relaxations David Steurer Cornell James R. Lee Washington Prasad Raghavendra Berkeley Institute for Advanced Study, November 2015 overview of results unconditional
Student Guide: Chapter 1
 Student Guide: Chapter 1 1.1 1.1.1 I can solve puzzles in teams 1-4 to 1-8 1.1 1.1.2 1.1 1.1.3 I can investigate the growth of patterns 1-13 to 1-17 1-18 to 1-22 I can investigate the graphs of quadratic
Student Guide: Chapter 1 1.1 1.1.1 I can solve puzzles in teams 1-4 to 1-8 1.1 1.1.2 1.1 1.1.3 I can investigate the growth of patterns 1-13 to 1-17 1-18 to 1-22 I can investigate the graphs of quadratic
Model Checking: An Introduction
 Model Checking: An Introduction Meeting 3, CSCI 5535, Spring 2013 Announcements Homework 0 ( Preliminaries ) out, due Friday Saturday This Week Dive into research motivating CSCI 5535 Next Week Begin foundations
Model Checking: An Introduction Meeting 3, CSCI 5535, Spring 2013 Announcements Homework 0 ( Preliminaries ) out, due Friday Saturday This Week Dive into research motivating CSCI 5535 Next Week Begin foundations
Is My CFD Mesh Adequate? A Quantitative Answer
 Is My CFD Mesh Adequate? A Quantitative Answer Krzysztof J. Fidkowski Gas Dynamics Research Colloqium Aerospace Engineering Department University of Michigan January 26, 2011 K.J. Fidkowski (UM) GDRC 2011
Is My CFD Mesh Adequate? A Quantitative Answer Krzysztof J. Fidkowski Gas Dynamics Research Colloqium Aerospace Engineering Department University of Michigan January 26, 2011 K.J. Fidkowski (UM) GDRC 2011
Quantum Annealing and the Satisfiability Problem
 arxiv:1612.7258v1 [quant-ph] 21 Dec 216 Quantum Annealing and the Satisfiability Problem 1. Introduction Kristen L PUDENZ 1, Gregory S TALLANT, Todd R BELOTE, and Steven H ADACHI Lockheed Martin, United
arxiv:1612.7258v1 [quant-ph] 21 Dec 216 Quantum Annealing and the Satisfiability Problem 1. Introduction Kristen L PUDENZ 1, Gregory S TALLANT, Todd R BELOTE, and Steven H ADACHI Lockheed Martin, United
CEC 450 Real-Time Systems
 E 450 Real-ime Systems Lecture 4 Rate Monotonic heory Part September 7, 08 Sam Siewert Quiz Results 93% Average, 75 low, 00 high Goal is to learn what you re not learning yet Motivation to keep up with
E 450 Real-ime Systems Lecture 4 Rate Monotonic heory Part September 7, 08 Sam Siewert Quiz Results 93% Average, 75 low, 00 high Goal is to learn what you re not learning yet Motivation to keep up with
VN-100 Velocity Compensation
 VN-100 Velocity Compensation Velocity / Airspeed Aiding for AHRS Applications Application Note Abstract This application note describes how the VN-100 can be used in non-stationary applications which require
VN-100 Velocity Compensation Velocity / Airspeed Aiding for AHRS Applications Application Note Abstract This application note describes how the VN-100 can be used in non-stationary applications which require
COMS 4771 Introduction to Machine Learning. Nakul Verma
 COMS 4771 Introduction to Machine Learning Nakul Verma Announcements HW1 due next lecture Project details are available decide on the group and topic by Thursday Last time Generative vs. Discriminative
COMS 4771 Introduction to Machine Learning Nakul Verma Announcements HW1 due next lecture Project details are available decide on the group and topic by Thursday Last time Generative vs. Discriminative
Online Model Predictive Torque Control for Permanent Magnet Synchronous Motors
 Online Model Predictive Torque Control for Permanent Magnet Synchronous Motors Gionata Cimini, Daniele Bernardini, Alberto Bemporad and Stephen Levijoki ODYS Srl General Motors Company 2015 IEEE International
Online Model Predictive Torque Control for Permanent Magnet Synchronous Motors Gionata Cimini, Daniele Bernardini, Alberto Bemporad and Stephen Levijoki ODYS Srl General Motors Company 2015 IEEE International
Information Flow Analysis via Path Condition Refinement
 Information Flow Analysis via Path Condition Refinement Mana Taghdiri, Gregor Snelting, Carsten Sinz Karlsruhe Institute of Technology, Germany FAST September 16, 2010 KIT University of the State of Baden-Wuerttemberg
Information Flow Analysis via Path Condition Refinement Mana Taghdiri, Gregor Snelting, Carsten Sinz Karlsruhe Institute of Technology, Germany FAST September 16, 2010 KIT University of the State of Baden-Wuerttemberg
Introduction to System Optimization: Part 1
 Introduction to System Optimization: Part 1 James Allison ME 555 March 7, 2007 System Optimization Subsystem optimization results optimal system? Objective: provide tools for developing system optimization
Introduction to System Optimization: Part 1 James Allison ME 555 March 7, 2007 System Optimization Subsystem optimization results optimal system? Objective: provide tools for developing system optimization
DISTURBANCES MONITORING FROM CONTROLLER STATES
 DISTURBANCES MONITORING FROM CONTROLLER STATES Daniel Alazard Pierre Apkarian SUPAERO, av. Edouard Belin, 3 Toulouse, France - Email : alazard@supaero.fr Mathmatiques pour l Industrie et la Physique, Université
DISTURBANCES MONITORING FROM CONTROLLER STATES Daniel Alazard Pierre Apkarian SUPAERO, av. Edouard Belin, 3 Toulouse, France - Email : alazard@supaero.fr Mathmatiques pour l Industrie et la Physique, Université
Motion planning applications of Satisfiability Modulo Convex Optimization
 Motion planning applications of Satisfiability Modulo Convex Optimization Yasser Shoukry (1) and Paulo Tabuada (2) (1) Department of Electrical and Computer Engineering, UMD (2) Electrical and Computer
Motion planning applications of Satisfiability Modulo Convex Optimization Yasser Shoukry (1) and Paulo Tabuada (2) (1) Department of Electrical and Computer Engineering, UMD (2) Electrical and Computer
Gyrokinetic Turbulence in Tokamaks and Stellarators
 Gyrokinetic Turbulence in Tokamaks and Stellarators Frank Jenko IPP, Germany Acknowledgements: P. Xanthopoulos, F. Merz, T. Görler, M. Pueschel, D. Told; A. Boozer, G. Hammett, D. Mikkelsen, M. Zarnstorff,
Gyrokinetic Turbulence in Tokamaks and Stellarators Frank Jenko IPP, Germany Acknowledgements: P. Xanthopoulos, F. Merz, T. Görler, M. Pueschel, D. Told; A. Boozer, G. Hammett, D. Mikkelsen, M. Zarnstorff,
OPTIMISATION COMPETITION
 1 ST ACT GLOBAL TRAJECTORY OPTIMISATION COMPETITION Carlos Corral Van Damme Raul Cadenas Gorgojo Jesus Gil Fernandez (GMV, S.A.) ESTEC, 2 nd February, 2006 GMV S.A., 2006 Property of GMV S.A. All rights
1 ST ACT GLOBAL TRAJECTORY OPTIMISATION COMPETITION Carlos Corral Van Damme Raul Cadenas Gorgojo Jesus Gil Fernandez (GMV, S.A.) ESTEC, 2 nd February, 2006 GMV S.A., 2006 Property of GMV S.A. All rights
Decentralized Stabilization of Heterogeneous Linear Multi-Agent Systems
 1 Decentralized Stabilization of Heterogeneous Linear Multi-Agent Systems Mauro Franceschelli, Andrea Gasparri, Alessandro Giua, and Giovanni Ulivi Abstract In this paper the formation stabilization problem
1 Decentralized Stabilization of Heterogeneous Linear Multi-Agent Systems Mauro Franceschelli, Andrea Gasparri, Alessandro Giua, and Giovanni Ulivi Abstract In this paper the formation stabilization problem
Interpolation. Seminar Slides. Betim Musa. 27 th June Albert-Ludwigs-Universität Freiburg
 Interpolation Seminar Slides Albert-Ludwigs-Universität Freiburg Betim Musa 27 th June 2015 Motivation program add(int a, int b) { var x,i : int; l 0 assume(b 0); l 1 x := a; l 2 i := 0; while(i < b) {
Interpolation Seminar Slides Albert-Ludwigs-Universität Freiburg Betim Musa 27 th June 2015 Motivation program add(int a, int b) { var x,i : int; l 0 assume(b 0); l 1 x := a; l 2 i := 0; while(i < b) {
Outline. Complexity Theory. Example. Sketch of a log-space TM for palindromes. Log-space computations. Example VU , SS 2018
 Complexity Theory Complexity Theory Outline Complexity Theory VU 181.142, SS 2018 3. Logarithmic Space Reinhard Pichler Institute of Logic and Computation DBAI Group TU Wien 3. Logarithmic Space 3.1 Computational
Complexity Theory Complexity Theory Outline Complexity Theory VU 181.142, SS 2018 3. Logarithmic Space Reinhard Pichler Institute of Logic and Computation DBAI Group TU Wien 3. Logarithmic Space 3.1 Computational
Online generation via offline selection - Low dimensional linear cuts from QP SDP relaxation -
 Online generation via offline selection - Low dimensional linear cuts from QP SDP relaxation - Radu Baltean-Lugojan Ruth Misener Computational Optimisation Group Department of Computing Pierre Bonami Andrea
Online generation via offline selection - Low dimensional linear cuts from QP SDP relaxation - Radu Baltean-Lugojan Ruth Misener Computational Optimisation Group Department of Computing Pierre Bonami Andrea
Integrated Math 3 Math 3 Course Description:
 Course Description: Integrated Math 3 Math 3 Course Description: Integrated strands include algebra, functions, geometry, trigonometry, statistics, probability and discrete math. Scope and sequence includes
Course Description: Integrated Math 3 Math 3 Course Description: Integrated strands include algebra, functions, geometry, trigonometry, statistics, probability and discrete math. Scope and sequence includes
Configuration Aerodynamics
 Configuration Aerodynamics William H. Mason Virginia Tech Blacksburg, VA The front cover of the brochure describing the French Exhibit at the Montreal Expo, 1967. January 2018 W.H. Mason CONTENTS i CONTENTS
Configuration Aerodynamics William H. Mason Virginia Tech Blacksburg, VA The front cover of the brochure describing the French Exhibit at the Montreal Expo, 1967. January 2018 W.H. Mason CONTENTS i CONTENTS
Localizer Hold Autopilot
 Localizer Hold Autopilot Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Localizer hold autopilot is one of the important
Localizer Hold Autopilot Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Localizer hold autopilot is one of the important
Project Planning & Control Prof. Koshy Varghese Department of Civil Engineering Indian Institute of Technology, Madras
 Project Planning & Control Prof. Koshy Varghese Department of Civil Engineering Indian Institute of Technology, Madras (Refer Slide Time: 00:16) Lecture - 52 PERT Background and Assumptions, Step wise
Project Planning & Control Prof. Koshy Varghese Department of Civil Engineering Indian Institute of Technology, Madras (Refer Slide Time: 00:16) Lecture - 52 PERT Background and Assumptions, Step wise
Validation Chain for ATM Concepts
 EURONONTROL Agency Research Team Workshop Validation/Measuring ATM Performance Validation Chain for ATM Concepts Michael Roeder, May 2015, Bretigny Validation chain for ATM Concepts (example A-SMGCS projects)
EURONONTROL Agency Research Team Workshop Validation/Measuring ATM Performance Validation Chain for ATM Concepts Michael Roeder, May 2015, Bretigny Validation chain for ATM Concepts (example A-SMGCS projects)
Hypersonic Vehicle (HSV) Modeling
 Modeling") Hypersonic Vehicle (HSV) Modeling Carlos E. S. Cesnik Associate Professor of Aerospace Engineering University of Michigan, Ann Arbor HSV Concentration MA Kickoff Meeting Ann Arbor, 29 August 2007 Team
Hypersonic Vehicle (HSV) Modeling Carlos E. S. Cesnik Associate Professor of Aerospace Engineering University of Michigan, Ann Arbor HSV Concentration MA Kickoff Meeting Ann Arbor, 29 August 2007 Team
Chapter 2. Reductions and NP. 2.1 Reductions Continued The Satisfiability Problem (SAT) SAT 3SAT. CS 573: Algorithms, Fall 2013 August 29, 2013
 SAT 3SAT. CS 573: Algorithms, Fall 2013 August 29, 2013") Chapter 2 Reductions and NP CS 573: Algorithms, Fall 2013 August 29, 2013 2.1 Reductions Continued 2.1.1 The Satisfiability Problem SAT 2.1.1.1 Propositional Formulas Definition 2.1.1. Consider a set of
Chapter 2 Reductions and NP CS 573: Algorithms, Fall 2013 August 29, 2013 2.1 Reductions Continued 2.1.1 The Satisfiability Problem SAT 2.1.1.1 Propositional Formulas Definition 2.1.1. Consider a set of
An introduction to parallel algorithms
 An introduction to parallel algorithms Knut Mørken Department of Informatics Centre of Mathematics for Applications University of Oslo Winter School on Parallel Computing Geilo January 20 25, 2008 1/26
An introduction to parallel algorithms Knut Mørken Department of Informatics Centre of Mathematics for Applications University of Oslo Winter School on Parallel Computing Geilo January 20 25, 2008 1/26
Algebraic Methods. Motivation: Systems like this: v 1 v 2 v 3 v 4 = 1 v 1 v 2 v 3 v 4 = 0 v 2 v 4 = 0
 Motivation: Systems like this: v v 2 v 3 v 4 = v v 2 v 3 v 4 = 0 v 2 v 4 = 0 are very difficult for CNF SAT solvers although they can be solved using simple algebraic manipulations Let c 0, c,...,c 2 n
Motivation: Systems like this: v v 2 v 3 v 4 = v v 2 v 3 v 4 = 0 v 2 v 4 = 0 are very difficult for CNF SAT solvers although they can be solved using simple algebraic manipulations Let c 0, c,...,c 2 n
Oley Valley School District Planned Course of Instruction. Algebra 3/Trigonometry. Submitted by: Gary J. McManus June 13, 2016
 Oley Valley School District Planned Course of Instruction Algebra 3/Trigonometry Submitted by: Gary J. McManus June 13, 2016 1 Oley Valley School District - Planned Course Instruction Cover Page Title
Oley Valley School District Planned Course of Instruction Algebra 3/Trigonometry Submitted by: Gary J. McManus June 13, 2016 1 Oley Valley School District - Planned Course Instruction Cover Page Title
Benefits of Applying Predictive Intelligence to the Space Situational Awareness (SSA) Mission
 Mission") Benefits of Applying Predictive Intelligence to the Space Situational Awareness (SSA) Mission Abstract Ben Lane and Brian Mann Military Civil Space and Ground (MCS&G) Northrop Grumman Electronic Systems
Benefits of Applying Predictive Intelligence to the Space Situational Awareness (SSA) Mission Abstract Ben Lane and Brian Mann Military Civil Space and Ground (MCS&G) Northrop Grumman Electronic Systems