Predspracovanie obrazu
|
|
|
- Rudolph Booth
- 5 years ago
- Views:
Transcription
1 Predspracovanie obrazu Sonka, Hlavac, Boyle: Image Processing, Analysis and Machine vision, kapitola: Image pre-processing Szeliski: Computer Vision: Algorithms and Applications kapitola: Image processing
2 Predspracovanie obrazu operácie s obrazmi na najnižšej úrovni abstrakcie aj vstup aj výstup sú ikonické dáta
3 Cieľom predspracovania je zlepšenie kvality obrazových dát, ktorá potlačí neželané deformácie a skreslenia alebo zlepší niektoré črty obrazu, ktoré sú dôležité z hľadiska ďalšieho spracovania. Niekedy vylepšovanie (enhancement) a rekonštrukcia (restoration) obrazu
4 Existujú 4 základné typy metód predspracovania: Jasové transformácie transformácia závisí od vlastností pixla samotného Geometrické transformácie Lokálne predspracovanie transformácie závisí od samotného pixla a jeho okolia Rekonštrukcia obrazu niekedy nepatrí, rieši chyby pri snímaní
5 Lokálne predspracovanie Metódy lokálneho predspracovania používajú malé okolie obrazového bodu (obyčajne štvorcové) zo vstupného obrazu vytvoríme novú jasovú hodnotu obrazového bodu vo výstupnom obraze. Také operácie sa nazývajú filtrácie.
6 Predspracovanie môže sledovať dva ciele: vyhladzovanie a detekciu (zvýraznenie) hrán. vyhladzovanie rozostruje hrany, lebo potláča vyššie frekvencie detekcia hrán zvýrazňuje vyššie frekvencie, zvýrazňuje aj šum to je protichodné, ale niektoré techniky robia oboje Iná klasifikácie metód lokálneho predspracovania rozlišuje lineárne a nelineárne transformácie.
7 Filtrovanie obrazu Lineárne filtre Výsledná hodnota pixla je vážený súčet okolitých pixlov Nelineárne filtre Median filtering Bilaterálny filtering Morfológia na nasledujúcej prednáške
8 Vyhladzovanie založené na priemerovaní a jeho modifikáciách, alebo na usporiadaných filtroch (ako medián) Ekvivalentne diskrétnej konvolúcii s kernelom h

9

10 Gaussov filter Gaussian Vyhladenie obrazu Vhodný pri odstraňovaní Gaussovho šumu

11 Riešenie okrajov Nula Konštanta pevne daná farba okrajov Clamp - Opakovanie okrajových pixelov Wrap Opakovanie cyklicky Zrkadlovo

12 Separabilné filtre Konvolúcia maskou kxk stojí k operácií pre každý pixel Niektoré masky môžu byť rozložené na D masky horizontálne a vertikálne cena sa zníži na k operácií pre každý pixel

13 Separabilné filtre
14 Ako zistíme či je kernel separabilný? Použitím SVD singulárny rozklad matice Ak iba. singulárna hodnota je nenulová kernel je separabilný vertikálny kernel horizontálny kernel
 Alfa trimmed mean Odstránim najmenšiu a najväčšiu")
15 Nelineárne filtre Median filtering Pri filtrovaní snímacieho šumu (shot noise) Alfa trimmed mean Odstránim najmenšiu a najväčšiu hodnotu
16 Bilateral filtering Hodnota výsledného pixla závisí od váženej kombinácie okolitých pixlov váhový koeficient w závisí od domain kernela (Gaussian) a na dátach závislom range kernely Prenásobením dostaneme na dátach závislú bilaterálnu váženú funkciu

17

18 Detekciu hrán robíme cez gradientné operátory Veľkosť gradientu a smer Ak sa intenzity v danom okoli bodu príliš nelíšia - pravdepodobne tam nie je hrana Ak sa líšia - bod môže patriť hrane
19 Sú tri druhy gradientných operátorov. aproximujúce prvú deriváciu obrazovej funkcie, ktoré sú založené na diferenciách obvykle majú viacero masiek, okrem Laplaciánu, orientácia sa určuje ako najlepšia zhoda viacerých vzorov. založené na zero-crossing druhej derivácie obrazovej funkcie (Marr-Hildrethovej operátor, Cannyho operátor) 3. založené na predstave obrazovej funkcie mapovanej parametrickým modelom hrán

20 Typy hrán schod rampa skutočné hrany - šum čiara hrebeň strecha

21 Typy hrán

22
23 Metódy hľadania hrán konvolučné masky diskrétna aproximácia diferenciálnych operátorov (miera zmeny intenzity) Informácia o: existencia orientácia?
24 x y x f y x f x y x f m n m n,,, x y x f y x f y y x f m n m n,,, ), ( ), ( ), ( ), ( ), ( ), ( y x I y x I y y x I y x I y x I x y x I 0 * 0 * I y I I x I Diferencovanie D

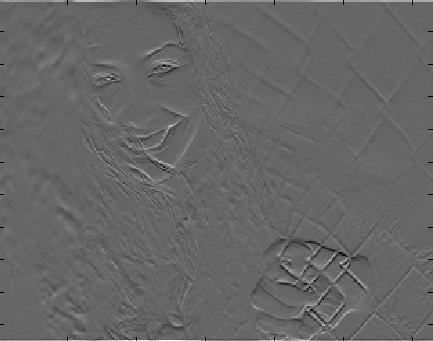
25 Diferencovanie I x I * I I y I * Ktorý obrázok je I x?
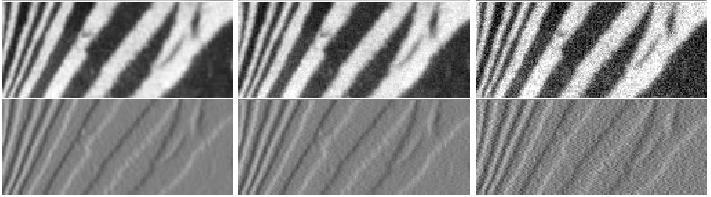
26 Diferencovanie a šum


27 Vyhladenie prah 0 prah 50 originál Gaussovské vyhladenie

28 Následky šumu
29 Vyhladenie
30 Gradient Gradient: Smer najväčšia zmena intenzity Smer gradientu: Veľkosť gradientu: f G x Gy



31 Gradient / hrany f e Sila (dôležitosť) hrany = veľkosť gradientu Smer hrany = smer gradientu 90
32 Diferenčné gradientné operátory možno vyjadriť pomocou konvolučných masiek; dostaneme Robertsov, Prewittov, Sobelov, Robinsonov a Kirschov operátor. Hlavnou nevýhodou konvolučných hranových detektorov je ich závislosť na škálovaní a citlivosť na šum. Väčšinou existuje málo rozumných dôvodov pre výber konkrétnej veľkosti okolia operátora.

33 Gradient
34 Najjednoduchšie masky Roberts Len body hrán Nie orientácia Vhodné pre binárne obrazy Nevýhody: Veľká citlivosť na šum Nepresná lokalizácia Málo bodov na aproximáciu gradientu 0-0
35 Sobel Hľadá horizontálne a vertikálne hrany Konvolučné masky: 0 y x 0 0
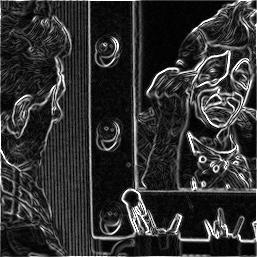
36 Sobel d dx I I d dx I d dy I d dy I prahovanie hrany


37 Sobel d dx I I d dy I



38 Sobel E d dx I d dy I I E Threshold 00
39 Prewitt Podobne ako Sobel Masky: 0 y x 0 0


40 Prewitt d dx I I d dy I

41 Prewitt E d dx I d dy I I E 00
42 Kirsch - kompas operátor Rotujúca maska Smery: 0, 45, 90, 35,... Sila hrany maximum cez jednotlivé masky Smer hrany maska dávajúca maximum f e f e
43 Robinson
44 Robinson Kirsch Prewitt Sobel
45 Zisťovanie prechodu nulou (Zero-crossing) druhej derivácie je robustnejšia metóda ako gradientné operátory malej veľkosti počíta sa ako Laplacián z Gaussiánov (LoG) alebo ako diferencia Gaussiánov (DoG). prečo druhá derivácia lebo prechod nulou sa zisťuje ľahšie ako extrém pri prvej derivácii ako môžeme počítať druhú deriváciu robustne - postup je: najprv obraz vyhladiť (na vyhladenie sa použije Gaussovský filter) a potom urobiť druhú deriváciu
46 vzorce Gaussián alebo Gaussovský filter G(x,y) je daný ako kde x a y sú obrazové súradnice a σ je štandardná odchýlka súvisiaceho rozdelenia pravdepodobnosti. Parameter σ je jediným parametrom filtra a je úmerný veľkosti okolia, v ktorom filter pôsobí. rozmer konvolučných masiek narastá s rastúcim σ (väčšie σ znamená, že len výraznejšie zmeny budú zachytené) Obrazové body, ktoré sú vzdialenejšie od centra filtra majú menší vplyv, tie, čo sú vzdialené viac ako 3σ majú zanedbateľný vplyv.

47 Druhá derivácia
48 Laplacián ), ( ), ( ), ( j i f j i f j i f x f ), ( ), ( ), ( j i f j i f j i f y f Konvolúcia [, -, ] - je izotropný operátor, na všetky zmeny reaguje rovnako y f x f f
49 Laplacián Nevýhody: Veľmi citlivý na šum -8 Produkuje dvojité hrany Neurčuje smer hrany






50 Laplacián

51 Laplacián Gaussiánu Marr Hildreth operátor, LoG operátor Vyhladenie pomocou D Gaussiánu S G I Následná aplikácia Laplaciánu G e x y S S x y S

52 Laplacián Gaussiánu E ( I G) L I ( G L) S G * I G * I Gaussian Laplacian of Gaussian
53 deriváciu Gaussovho filtra v hranatej zátvorke si môžeme predvypočítať analyticky, pretože nezávisí na obrazovej funkcii. substitúciou r =x +y prevedieme Gaussián na D prípad, vypočítame. deriváciu a po spätnom využití substitúcie dostaneme konvolučnú masku Marr-Hildrethovej operátora

54
55 príklad diskrétnej aproximácie na 7x7
56 Rozdiel Gaussiánov Aproximácia LoG operátora DoG Rozdiel Gaussiánov s dostatočne rozdielnymi σ σ / σ =.6 LoG (σ =.35) DoG (σ = 0, σ = 6)





57 3 6
58 Škálovanie v spracovaní obrazu nie je jednoduché nájsť vhodnú škálu, treba hľadať a skúšať, žiadna nemusí byť úplne najlepšia Marrova téza ak sa hrana vyskytuje v obrazoch s rôznou škálou, tak zodpovedá reálnej hrane Špecifickým prístupom k optimálnej škále je Cannyho operátor
59 Cannyho hranový operátor je optimálny pre ostré hrany zašumené bielym šumom. Kritérium optimality je založené na 3 požiadavkách:. detekovať každú hranu, ale vynechať zdanlivé hrany,. minimálna lokalizačná chyba medzi skutočnou a detekovanou hranou 3. na potlačení viacnásobných odoziev na jednu hranu.
60 Canny ) Vyhladenie Gaussiánom ) Gradientný operátor Veľkosť gradientu Smer gradientu 3) Výber maxím v danom smere 4) Prahovanie dvoma prahmi
61 Original Canny
62 Canny Vyhladenie Gaussiánom S G * I Gradientný operátor (Sobel) S S S x y T S x S y T G e x y Veľkosť gradientu S S x S y Smer gradientu tan S S y x
63 Nasleduje hysterézne prahovanie - prahovanie odoziev hrany s dvoma prahmi silná odozva vracia hranu, nízka odozva spojená s blízkosťou vysokej odozvy môže vrátiť hranu) syntézu príznakov - zistí sa také sigma Gaussiánu, ktoré dáva odozvu väčšiu ako prahovú, a potom sa zväčšuje sigma a agreguje sa získaná informácia Na rozdiel od Marr-Hildrethovej operátora, ktorý je založený na Laplaciáne a teda nemá orientáciu, tu sa dá robiť aj orientácia.


64 Canny S G * I G * I G G x G y T G G S * I * I x y T

65 Canny M = S
66 Canny T T
67 Canny príklady Gauss 5x5, T=55, T=
68 Canny príklady Gauss 5x5, T=55, T=0

69 Canny príklady Gauss 5x5, T=8, T=

70 Canny príklady Gauss 9x9, T=8, T=
71 Parametrické modely hrán diskrétnu funkciu intenzity obrazu možno považovať za vzorkovanú a zašumenú aproximáciu určitej spojitej alebo po častiach spojitej funkcie intenzity obrazu. Keďže jej priebeh nie je známy, odhaduje sa zo známej diskrétnej funkcie a jej vlastností. Používajú sa po častiach spojité funkcie, ktoré sa nazývajú fazety (alebo plôšky) a model sa nazýva fazetový (plôškový) model.
72 Najjednoduchší plochý fazetový model, používa konštantné funkcie a okolie pixla je reprezentované funkciami konštantnej intenzity. lineárne modely, kvadratické a bikubické modely Príklad: bikubický fazetový model c i sa odhadujú z okolia obrazového bodu, pomocou metódy najmenších štvorcov, alebo priamo z okolia rozmeru 5 x 5.
73 Keď už máme fazetové parametre pre každý obrazový bod hrany určíme pomocou extrému.derivácie alebo ako prechod nulou druhej derivácie lokálne spojitej fazetovej funkcie. Určenie hrán je potom presnejšie ako pri diferenčných hranových operátoroch, ale platíme za to náročnosťou výpočtu.
Kľúčové slová: SAR, šum spekl noise, evolučná PDR, lineárna difúzia, Perona-Malikova rovnica, štatistickéfiltre, Leeho filter
 Kľúčové slová: SAR, šum spekl noise, evolučná PDR, lineárna difúzia, Perona-Malikova rovnica, štatistickéfiltre, Leeho filter Tvorba šumu spekl radarový senzor vysiela elektromagneticlý pulz a meria odraz
Kľúčové slová: SAR, šum spekl noise, evolučná PDR, lineárna difúzia, Perona-Malikova rovnica, štatistickéfiltre, Leeho filter Tvorba šumu spekl radarový senzor vysiela elektromagneticlý pulz a meria odraz
Kapitola S5. Skrutkovica na rotačnej ploche
 Kapitola S5 Skrutkovica na rotačnej ploche Nech je rotačná plocha určená osou rotácie o a meridiánom m. Skrutkový pohyb je pohyb zložený z rovnomerného rotačného pohybu okolo osi o a z rovnomerného translačného
Kapitola S5 Skrutkovica na rotačnej ploche Nech je rotačná plocha určená osou rotácie o a meridiánom m. Skrutkový pohyb je pohyb zložený z rovnomerného rotačného pohybu okolo osi o a z rovnomerného translačného
Edge Detection. CS 650: Computer Vision
 CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
Image Gradients and Gradient Filtering Computer Vision
 Image Gradients and Gradient Filtering 16-385 Computer Vision What is an image edge? Recall that an image is a 2D function f(x) edge edge How would you detect an edge? What kinds of filter would you use?
Image Gradients and Gradient Filtering 16-385 Computer Vision What is an image edge? Recall that an image is a 2D function f(x) edge edge How would you detect an edge? What kinds of filter would you use?
Jádrové odhady gradientu regresní funkce
 Monika Kroupová Ivana Horová Jan Koláček Ústav matematiky a statistiky, Masarykova univerzita, Brno ROBUST 2018 Osnova Regresní model a odhad gradientu Metody pro odhad vyhlazovací matice Simulace Závěr
Monika Kroupová Ivana Horová Jan Koláček Ústav matematiky a statistiky, Masarykova univerzita, Brno ROBUST 2018 Osnova Regresní model a odhad gradientu Metody pro odhad vyhlazovací matice Simulace Závěr
Edge Detection. Introduction to Computer Vision. Useful Mathematics Funcs. The bad news
 Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Lecture 7: Edge Detection
 #1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
#1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
Filtering and Edge Detection
 Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Roadmap. Introduction to image analysis (computer vision) Theory of edge detection. Applications
 Theory of edge detection. Applications") Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Edge Detection. Image Processing - Computer Vision
 Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Matematická analýza II.
 V. Diferenciálny počet (prezentácia k prednáške MANb/10) doc. RNDr., PhD. 1 1 ondrej.hutnik@upjs.sk umv.science.upjs.sk/analyza Prednáška 8 6. marca 2018 It has apparently not yet been observed, that...
V. Diferenciálny počet (prezentácia k prednáške MANb/10) doc. RNDr., PhD. 1 1 ondrej.hutnik@upjs.sk umv.science.upjs.sk/analyza Prednáška 8 6. marca 2018 It has apparently not yet been observed, that...
Metódy vol nej optimalizácie
 Matematické programovanie Metódy vol nej optimalizácie p. 1/35 Informácie o predmete Informácie o predmete p. 2/35 Informácie o predmete METÓDY VOL NEJ OPTIMALIZÁCIE Prednášajúca: M. Trnovská (M 267) Cvičiaci:
Matematické programovanie Metódy vol nej optimalizácie p. 1/35 Informácie o predmete Informácie o predmete p. 2/35 Informácie o predmete METÓDY VOL NEJ OPTIMALIZÁCIE Prednášajúca: M. Trnovská (M 267) Cvičiaci:
MULTIPARAMETRICKÁ SEGMENTACE MR OBRAZŮ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV TELEKOMUNIKACÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF TELECOMMUNICATIONS
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV TELEKOMUNIKACÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF TELECOMMUNICATIONS
Teória grafov. RNDr. Milan Stacho, PhD.
 Teória grafov RNDr. Milan Stacho, PhD. Literatúra Plesník: Grafové algoritmy, Veda Bratislava 1983 Sedláček: Úvod do teórie grafů, Academia Praha 1981 Bosák: Grafy a ich aplikácie, Alfa Bratislava 1980
Teória grafov RNDr. Milan Stacho, PhD. Literatúra Plesník: Grafové algoritmy, Veda Bratislava 1983 Sedláček: Úvod do teórie grafů, Academia Praha 1981 Bosák: Grafy a ich aplikácie, Alfa Bratislava 1980
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection
 Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Reading. 3. Image processing. Pixel movement. Image processing Y R I G Q
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Lecture 04 Image Filtering
 Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Ing. Tomasz Kanik. doc. RNDr. Štefan Peško, CSc.
 Ing. Tomasz Kanik Školiteľ: doc. RNDr. Štefan Peško, CSc. Pracovisko: Študijný program: KMMOA, FRI, ŽU 9.2.9 Aplikovaná informatika 1 identifikácia problémovej skupiny pacientov, zlepšenie kvality rozhodovacích
Ing. Tomasz Kanik Školiteľ: doc. RNDr. Štefan Peško, CSc. Pracovisko: Študijný program: KMMOA, FRI, ŽU 9.2.9 Aplikovaná informatika 1 identifikácia problémovej skupiny pacientov, zlepšenie kvality rozhodovacích
Radka Sabolová Znaménkový test
 Univerzita Karlova v Praze Matematicko-fyzikální fakulta BAKALÁŘSKÁ PRÁCE Radka Sabolová Znaménkový test Katedra pravděpodobnosti a matematické statistiky Vedoucí bakalářské práce: Mgr. Martin Schindler
Univerzita Karlova v Praze Matematicko-fyzikální fakulta BAKALÁŘSKÁ PRÁCE Radka Sabolová Znaménkový test Katedra pravděpodobnosti a matematické statistiky Vedoucí bakalářské práce: Mgr. Martin Schindler
Segmentace textury. Jan Kybic
 Segmentace textury Případová studie Jan Kybic Zadání Mikroskopický obrázek segmentujte do tříd: Příčná vlákna Podélná vlákna Matrice Trhliny Zvolená metoda Deskriptorový popis Učení s učitelem ML klasifikátor
Segmentace textury Případová studie Jan Kybic Zadání Mikroskopický obrázek segmentujte do tříd: Příčná vlákna Podélná vlákna Matrice Trhliny Zvolená metoda Deskriptorový popis Učení s učitelem ML klasifikátor
PROGRAM VZDELÁVACEJ ČINNOSTI. Anotácia predmetu
 PROGRAM VZDELÁVACEJ ČINNOSTI Číslo predmetu : 3I0107 Názov predmetu : Štatistické a numerické metódy Typ predmetu : Povinný Študijný odbor: EF Zameranie: Ročník : 1. Ing. Semester : zimný Počet hodín týždenne
PROGRAM VZDELÁVACEJ ČINNOSTI Číslo predmetu : 3I0107 Názov predmetu : Štatistické a numerické metódy Typ predmetu : Povinný Študijný odbor: EF Zameranie: Ročník : 1. Ing. Semester : zimný Počet hodín týždenne
METRICKÉ ÚLOHY V PRIESTORE
 1. ÚVOD METRICKÉ ÚLOHY V PRIESTORE Monika ĎURIKOVIČOVÁ 1 Katedra Matematiky, Strojnícka fakulta STU, Abstrakt: Popisujeme možnosti použitia programového systému Mathematica pri riešení špeciálnych metrických
1. ÚVOD METRICKÉ ÚLOHY V PRIESTORE Monika ĎURIKOVIČOVÁ 1 Katedra Matematiky, Strojnícka fakulta STU, Abstrakt: Popisujeme možnosti použitia programového systému Mathematica pri riešení špeciálnych metrických
Edge Detection. Computer Vision P. Schrater Spring 2003
 Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
NAVIGÁCIA MOBILNÉHO ROBOTA VIZUÁLNYM SYSTÉMOM
 Slovenská technická univerzita v Bratislave Fakulta elektrotechniky a informatiky Ing. Peter Pásztó Autoreferát dizertačnej práce NAVIGÁCIA MOBILNÉHO ROBOTA VIZUÁLNYM SYSTÉMOM Na získanie akademického
Slovenská technická univerzita v Bratislave Fakulta elektrotechniky a informatiky Ing. Peter Pásztó Autoreferát dizertačnej práce NAVIGÁCIA MOBILNÉHO ROBOTA VIZUÁLNYM SYSTÉMOM Na získanie akademického
Laplacian Filters. Sobel Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters
 Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
PROGRAMY NA SPRACOVANIE A VIZUALIZÁCIU EXPERIMENTÁLNYCH DÁT
 PROGRAMY NA SPRACOVANIE A VIZUALIZÁCIU EXPERIMENTÁLNYCH DÁT Ladislav ŠEVČOVIČ http://people.tuke.sk/ladislav.sevcovic Strana 1 z 20 Strana 2 z 20 V prezentácii sú použité názvy programových produktov,
PROGRAMY NA SPRACOVANIE A VIZUALIZÁCIU EXPERIMENTÁLNYCH DÁT Ladislav ŠEVČOVIČ http://people.tuke.sk/ladislav.sevcovic Strana 1 z 20 Strana 2 z 20 V prezentácii sú použité názvy programových produktov,
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005
 Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Univerzita Karlova v Praze. Matematicko-fyzikální fakulta. Ústav teorie informace a automatizace AV ČR Šroubek PhD.
 Univerzita Karlova v Praze Matematicko-fyzikální fakulta DIPLOMOVÁ PRÁCA František Brantál Vícekanálová slepá dokonvoluce vektorových obrazů Ústav teorie informace a automatizace AV ČR Vedúci diplomovej
Univerzita Karlova v Praze Matematicko-fyzikální fakulta DIPLOMOVÁ PRÁCA František Brantál Vícekanálová slepá dokonvoluce vektorových obrazů Ústav teorie informace a automatizace AV ČR Vedúci diplomovej
Lecture 6: Edge Detection. CAP 5415: Computer Vision Fall 2008
 Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
CAP 5415 Computer Vision
 CAP 545 Computer Vision Dr. Mubarak Sa Univ. o Central Florida Filtering Lecture-2 Contents Filtering/Smooting/Removing Noise Convolution/Correlation Image Derivatives Histogram Some Matlab Functions General
CAP 545 Computer Vision Dr. Mubarak Sa Univ. o Central Florida Filtering Lecture-2 Contents Filtering/Smooting/Removing Noise Convolution/Correlation Image Derivatives Histogram Some Matlab Functions General
Klasifikácia. Obchodný dom = oddelenia (typ/druh tovaru) alternatívne kritériá výberu príznakov vedú k rôznemu výsledku klasifikácie
 alternatívne kritériá výberu príznakov vedú k rôznemu výsledku klasifikácie") Klasifikácia Obchodný dom = oddelenia (typ/druh tovaru) alternatívne kritériá výberu príznakov vedú k rôznemu výsledku klasifikácie určenie triedy objektu na základe príznakov získaných z objektu Rozhodovacie
Klasifikácia Obchodný dom = oddelenia (typ/druh tovaru) alternatívne kritériá výberu príznakov vedú k rôznemu výsledku klasifikácie určenie triedy objektu na základe príznakov získaných z objektu Rozhodovacie
Jádrové odhady regresní funkce pro korelovaná data
 Jádrové odhady regresní funkce pro korelovaná data Ústav matematiky a statistiky MÚ Brno Finanční matematika v praxi III., Podlesí 3.9.-4.9. 2013 Obsah Motivace Motivace Motivace Co se snažíme získat?
Jádrové odhady regresní funkce pro korelovaná data Ústav matematiky a statistiky MÚ Brno Finanční matematika v praxi III., Podlesí 3.9.-4.9. 2013 Obsah Motivace Motivace Motivace Co se snažíme získat?
Od zmiešavacieho kalorimetra k ultra citlivej modulovanej kalorimetrii. Jozef Kačmarčík
 Od zmiešavacieho kalorimetra k ultra citlivej modulovanej kalorimetrii CENTRUM FYZIKY VEĽMI NÍZKYCH TEPLÔT Ústavu experimentálnej fyziky SAV a Univerzity P.J.Šafárika Centrum excelentnosti SAV Jozef Kačmarčík
Od zmiešavacieho kalorimetra k ultra citlivej modulovanej kalorimetrii CENTRUM FYZIKY VEĽMI NÍZKYCH TEPLÔT Ústavu experimentálnej fyziky SAV a Univerzity P.J.Šafárika Centrum excelentnosti SAV Jozef Kačmarčík
Prednáška 3. Optimalizačné metódy pre funkcie n-premenných. Študujme reálnu funkciu n-premenných. f: R R
 Prednáška 3 Optimalizačné metódy pre funkcie n-premenných Študujme reálnu funkciu n-premenných n f: R R Našou úlohou bude nájsť také x opt R n, pre ktoré má funkcia f minimum x opt = arg min ( f x) Túto
Prednáška 3 Optimalizačné metódy pre funkcie n-premenných Študujme reálnu funkciu n-premenných n f: R R Našou úlohou bude nájsť také x opt R n, pre ktoré má funkcia f minimum x opt = arg min ( f x) Túto
}w!"#$%&'()+,-./012345<ya
+,-./012345<ya") Masarykova univerzita Fakulta informatiky }w!"#$%&'()+,-./012345
Masarykova univerzita Fakulta informatiky }w!"#$%&'()+,-./012345
Obsah. 2 Určenie objemu valčeka Teoretický úvod Postup merania a spracovanie výsledkov... 10
 Obsah 1 Chyby merania 1 1.1 áhodné a systematické chyby.................... 1 1.2 Aritmetický priemer a stredná kvadratická chyba......... 1 1.3 Rozdelenie nameraných dát..................... 3 1.4 Limitné
Obsah 1 Chyby merania 1 1.1 áhodné a systematické chyby.................... 1 1.2 Aritmetický priemer a stredná kvadratická chyba......... 1 1.3 Rozdelenie nameraných dát..................... 3 1.4 Limitné
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Sept 2009 Lecture 8: Pyramids and image derivatives Goals Images as functions Derivatives of images Edges and gradients Laplacian pyramids Code for lecture
Introduction to Computer Vision Michael J. Black Sept 2009 Lecture 8: Pyramids and image derivatives Goals Images as functions Derivatives of images Edges and gradients Laplacian pyramids Code for lecture
ADM a logika. 4. prednáška. Výroková logika II, logický a sémantický dôsledok, teória a model, korektnosť a úplnosť
 ADM a logika 4. prednáška Výroková logika II, logický a sémantický dôsledok, teória a model, korektnosť a úplnosť 1 Odvodzovanie formúl výrokovej logiky, logický dôsledok, syntaktický prístup Logický dôsledok
ADM a logika 4. prednáška Výroková logika II, logický a sémantický dôsledok, teória a model, korektnosť a úplnosť 1 Odvodzovanie formúl výrokovej logiky, logický dôsledok, syntaktický prístup Logický dôsledok
UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY PREČO CHODÍ ČLOVEK V KRUHU JÁN DZÚRIK
 UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY PREČO CHODÍ ČLOVEK V KRUHU 2011 JÁN DZÚRIK UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY 45a87a64-1ec1-4718-a32f-6ba49c57d795
UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY PREČO CHODÍ ČLOVEK V KRUHU 2011 JÁN DZÚRIK UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY 45a87a64-1ec1-4718-a32f-6ba49c57d795
REKONŠTRUKCIA OBJEKTOV S VYUŽITÍM VIACNÁSOBNÝCH POHĽADOV
 UNIVERZITY KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY REKONŠTRUKCIA OBJEKTOV S VYUŽITÍM VIACNÁSOBNÝCH POHĽADOV Porovnávanie škálovo a afinne invariantných metód na hľadanie čŕt 21
UNIVERZITY KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY REKONŠTRUKCIA OBJEKTOV S VYUŽITÍM VIACNÁSOBNÝCH POHĽADOV Porovnávanie škálovo a afinne invariantných metód na hľadanie čŕt 21
Local enhancement. Local Enhancement. Local histogram equalized. Histogram equalized. Local Contrast Enhancement. Fig 3.23: Another example
 Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Maticové algoritmy I maticová algebra operácie nad maticami súčin matíc
 Maticové algoritmy I maticová algebra operácie nad maticami súčin matíc priesvitka Maurits Cornelis Escher (898-97) Ascending and Descending, 960, Lithograph priesvitka Matice V mnohých prípadoch dáta
Maticové algoritmy I maticová algebra operácie nad maticami súčin matíc priesvitka Maurits Cornelis Escher (898-97) Ascending and Descending, 960, Lithograph priesvitka Matice V mnohých prípadoch dáta
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CAP 5415 Computer Vision Fall 2011
 CAP 545 Computer Vision Fall 2 Dr. Mubarak Sa Univ. o Central Florida www.cs.uc.edu/~vision/courses/cap545/all22 Oice 247-F HEC Filtering Lecture-2 General Binary Gray Scale Color Binary Images Y Row X
CAP 545 Computer Vision Fall 2 Dr. Mubarak Sa Univ. o Central Florida www.cs.uc.edu/~vision/courses/cap545/all22 Oice 247-F HEC Filtering Lecture-2 General Binary Gray Scale Color Binary Images Y Row X
Objavovanie znalostí v databázach. Ján Paralič
 Objavovanie znalostí v databázach Ján Paralič Košice 2003 Ing. Ján Paralič, PhD. Katedra kybernetiky a umelej inteligencie Fakulta elektrotechniky a informatiky Technická univerzita v Košiciach Jan.Paralic@tuke.sk
Objavovanie znalostí v databázach Ján Paralič Košice 2003 Ing. Ján Paralič, PhD. Katedra kybernetiky a umelej inteligencie Fakulta elektrotechniky a informatiky Technická univerzita v Košiciach Jan.Paralic@tuke.sk
ŠTEFAN GUBO. Riešenie úloh nelineárnej regresie pomocou tabuľkového kalkulátora. Solution of nonlinear regression tasks using spredsheet application
 Wydawnictwo UR 2016 ISSN 2080-9069 ISSN 2450-9221 online Edukacja Technika Informatyka nr 1/15/2016 www.eti.rzeszow.pl DOI: 10.15584/eti.2016.1.27 ŠTEFAN GUBO Riešenie úloh nelineárnej regresie pomocou
Wydawnictwo UR 2016 ISSN 2080-9069 ISSN 2450-9221 online Edukacja Technika Informatyka nr 1/15/2016 www.eti.rzeszow.pl DOI: 10.15584/eti.2016.1.27 ŠTEFAN GUBO Riešenie úloh nelineárnej regresie pomocou
PSEUDOINVERZNÁ MATICA
 PSEUDOINVERZNÁ MATICA Jozef Fecenko, Michal Páleš Abstrakt Cieľom príspevku je podať základnú informácie o pseudoinverznej matici k danej matici. Ukázať, že bázický rozklad matice na súčin matíc je skeletným
PSEUDOINVERZNÁ MATICA Jozef Fecenko, Michal Páleš Abstrakt Cieľom príspevku je podať základnú informácie o pseudoinverznej matici k danej matici. Ukázať, že bázický rozklad matice na súčin matíc je skeletným
Review Smoothing Spatial Filters Sharpening Spatial Filters. Spatial Filtering. Dr. Praveen Sankaran. Department of ECE NIT Calicut.
 Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
11. prednáška ( ) Greedy algoritmy. Programovanie, algoritmy, zložitosť (Ústav informatiky, PF UPJŠ v Košiciach)
 Greedy algoritmy. Programovanie, algoritmy, zložitosť (Ústav informatiky, PF UPJŠ v Košiciach)") 11. prednáška (15. 5. 2012) Greedy algoritmy 1 Obsah Greedy stratégia, greedy algoritmus Minimálna kostra grafu Úloha o zastávkach autobusu Problém plnenia batoha Jednoduchý rozvrhový problém 2 Motivácia
11. prednáška (15. 5. 2012) Greedy algoritmy 1 Obsah Greedy stratégia, greedy algoritmus Minimálna kostra grafu Úloha o zastávkach autobusu Problém plnenia batoha Jednoduchý rozvrhový problém 2 Motivácia
Errors-in-variables models
 Univerzita Karlova v Praze Matematicko-fyzikální fakulta BAKALÁŘSKÁ PRÁCE Ida Fürjesová Errors-in-variables models Katedra pravděpodobnosti a matematické statistiky Vedoucí bakalářské práce: RNDr. Michal
Univerzita Karlova v Praze Matematicko-fyzikální fakulta BAKALÁŘSKÁ PRÁCE Ida Fürjesová Errors-in-variables models Katedra pravděpodobnosti a matematické statistiky Vedoucí bakalářské práce: RNDr. Michal
Neurónové siete v C# Neural networks in C# Michal Pavlech
 Neurónové siete v C# Neural networks in C# Michal Pavlech Diplomová práce 2009 ABSTRAKT Hlavným cieľom tejto práce je vytvoriť knižnicu na vytváranie a prácu s umelými neurónovými sieťami v jazyku C#.
Neurónové siete v C# Neural networks in C# Michal Pavlech Diplomová práce 2009 ABSTRAKT Hlavným cieľom tejto práce je vytvoriť knižnicu na vytváranie a prácu s umelými neurónovými sieťami v jazyku C#.
Kapitola P2. Rozvinuteľné priamkové plochy
 Kapitola P2 Rozvinuteľné priamkové plochy 1 Priamková plocha je rozvinuteľná, ak na nej ležia iba torzálne priamky. Rozvinuteľné priamkové plochy rozdeľujeme na: rovinu, valcové plochy, kužeľové plochy,
Kapitola P2 Rozvinuteľné priamkové plochy 1 Priamková plocha je rozvinuteľná, ak na nej ležia iba torzálne priamky. Rozvinuteľné priamkové plochy rozdeľujeme na: rovinu, valcové plochy, kužeľové plochy,
ENTROPIA. Claude Elwood Shannon ( ), USA A Mathematical Theory of Communication, 1948 LOGARITMUS
, USA A Mathematical Theory of Communication, 1948 LOGARITMUS") LOGARITMUS ENTROPIA Claude Elwood Shao (96-00), USA A Mathematcal Theory of Commucato, 948 7. storoče Naer, Brggs, orovae číselých ostuostí: artmetcká ostuosť 3 0 3 4 5 6 geometrcká ostuosť /8 /4 / 4 8
LOGARITMUS ENTROPIA Claude Elwood Shao (96-00), USA A Mathematcal Theory of Commucato, 948 7. storoče Naer, Brggs, orovae číselých ostuostí: artmetcká ostuosť 3 0 3 4 5 6 geometrcká ostuosť /8 /4 / 4 8
SURF Features. Jacky Baltes Dept. of Computer Science University of Manitoba WWW:
 SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
Advanced Edge Detection 1
 Advanced Edge Detection 1 Lecture 4 See Sections 2.4 and 1.2.5 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 27 Agenda 1 LoG
Advanced Edge Detection 1 Lecture 4 See Sections 2.4 and 1.2.5 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 27 Agenda 1 LoG
Appendix. Title. Petr Lachout MFF UK, ÚTIA AV ČR
 Title ROBUST - Kráĺıky - únor, 2010 Definice Budeme se zabývat optimalizačními úlohami. Uvažujme metrický prostor X a funkci f : X R = [, + ]. Zajímá nás minimální hodnota funkce f na X ϕ (f ) = inf {f
Title ROBUST - Kráĺıky - únor, 2010 Definice Budeme se zabývat optimalizačními úlohami. Uvažujme metrický prostor X a funkci f : X R = [, + ]. Zajímá nás minimální hodnota funkce f na X ϕ (f ) = inf {f
1 Matice a ich vlastnosti
 Pojem sústavy a jej riešenie 1 Matice a ich vlastnosti 11 Sústavy lineárnych rovníc a matice Príklad 11 V množine reálnych čísel riešte sústavu rovníc x - 2y + 4z + t = -6 2x + 3y - z + 2t = 13 2x + 5y
Pojem sústavy a jej riešenie 1 Matice a ich vlastnosti 11 Sústavy lineárnych rovníc a matice Príklad 11 V množine reálnych čísel riešte sústavu rovníc x - 2y + 4z + t = -6 2x + 3y - z + 2t = 13 2x + 5y
Taking derivative by convolution
 Taking derivative by convolution Partial derivatives with convolution For 2D function f(x,y), the partial derivative is: For discrete data, we can approximate using finite differences: To implement above
Taking derivative by convolution Partial derivatives with convolution For 2D function f(x,y), the partial derivative is: For discrete data, we can approximate using finite differences: To implement above
Lucia Fuchsová Charakteristiky pravděpodobnostních
 Univerzita Karlova v Praze Matematicko-fyzikální fakulta BAKALÁŘSKÁ PRÁCE Lucia Fuchsová Charakteristiky pravděpodobnostních předpovědí Katedra pravděpodobnosti a matematické statistiky Vedoucí bakalářské
Univerzita Karlova v Praze Matematicko-fyzikální fakulta BAKALÁŘSKÁ PRÁCE Lucia Fuchsová Charakteristiky pravděpodobnostních předpovědí Katedra pravděpodobnosti a matematické statistiky Vedoucí bakalářské
České vysoké učení technické v Praze
 České vysoké učení technické v Praze Fakulta elektrotechnická Katedra řídicí techniky Odhad kovariančných matíc šumu lineárneho stochastického systému Diplomová práca Vypracoval: Peter Matisko Školiteľ:
České vysoké učení technické v Praze Fakulta elektrotechnická Katedra řídicí techniky Odhad kovariančných matíc šumu lineárneho stochastického systému Diplomová práca Vypracoval: Peter Matisko Školiteľ:
CS4495/6495 Introduction to Computer Vision. 2A-L6 Edge detection: 2D operators
 CS4495/6495 Introduction to Computer Vision 2A-L6 Edge detection: 2D operators Derivative theorem of convolution - 1D This saves us one operation: ( ) ( ) x h f h f x f h h x h x ( ) f Derivative of Gaussian
CS4495/6495 Introduction to Computer Vision 2A-L6 Edge detection: 2D operators Derivative theorem of convolution - 1D This saves us one operation: ( ) ( ) x h f h f x f h h x h x ( ) f Derivative of Gaussian
Feature Extraction and Image Processing
 Feature Extraction and Image Processing Second edition Mark S. Nixon Alberto S. Aguado :*авш JBK IIP AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Feature Extraction and Image Processing Second edition Mark S. Nixon Alberto S. Aguado :*авш JBK IIP AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Analýza multispektrálnych dát z konfokálnej mikroskopie. DIPLOMOVÁ PRÁCA
 Analýza multispektrálnych dát z konfokálnej mikroskopie. DIPLOMOVÁ PRÁCA Kamil Paulíny UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY FYZIKY A INFORMATIKY KATEDRA APLIKOVANEJ INFORMATIKY Študijný
Analýza multispektrálnych dát z konfokálnej mikroskopie. DIPLOMOVÁ PRÁCA Kamil Paulíny UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY FYZIKY A INFORMATIKY KATEDRA APLIKOVANEJ INFORMATIKY Študijný
Matematická analýza II.
 V. Diferenciálny počet (prezentácia k prednáške MANb/10) doc. RNDr., PhD. 1 1 ondrej.hutnik@upjs.sk umv.science.upjs.sk/analyza Prezentácie k prednáškam čast II 21. februára 2018 The extent of this calculus
V. Diferenciálny počet (prezentácia k prednáške MANb/10) doc. RNDr., PhD. 1 1 ondrej.hutnik@upjs.sk umv.science.upjs.sk/analyza Prezentácie k prednáškam čast II 21. februára 2018 The extent of this calculus
UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY DETEKOVANIE KOMUNÍT V SOCIÁLNYCH SIEŤACH Patricia SVITKOVÁ
 UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY DETEKOVANIE KOMUNÍT V SOCIÁLNYCH SIEŤACH BAKALÁRSKA PRÁCA 2017 Patricia SVITKOVÁ UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY,
UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY DETEKOVANIE KOMUNÍT V SOCIÁLNYCH SIEŤACH BAKALÁRSKA PRÁCA 2017 Patricia SVITKOVÁ UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY,
Matematika 17. a 18. storočia
 Matematika 17. a 18. storočia René Descartes Narodený : 31 Marec 1596 v La Haye (teraz Descartes),Touraine, France Zomrel : 11 Feb 1650 v Stockholm, Sweden Riešenie kvadratických rovníc podľa Descarta
Matematika 17. a 18. storočia René Descartes Narodený : 31 Marec 1596 v La Haye (teraz Descartes),Touraine, France Zomrel : 11 Feb 1650 v Stockholm, Sweden Riešenie kvadratických rovníc podľa Descarta
VÝUČBA DIFFERENCIÁLNEHO POČTU FUNKCIE VIAC PREMENNÝCH POMOCOU PG. SYST. MATHEMATICA
 VÝUČBA DIFFERENCIÁLNEHO POČTU FUNKCIE VIAC PREMENNÝCH POMOCOU PG. SYST. MATHEMATICA Monika Kováčová Katedra Matematiky SjF STU Bratislava kovacova_v@dekan.sjf.stuba.sk Abstrakt. V článku popisujeme možnosti
VÝUČBA DIFFERENCIÁLNEHO POČTU FUNKCIE VIAC PREMENNÝCH POMOCOU PG. SYST. MATHEMATICA Monika Kováčová Katedra Matematiky SjF STU Bratislava kovacova_v@dekan.sjf.stuba.sk Abstrakt. V článku popisujeme možnosti
Fakulta matematiky, fyziky a informatiky Univerzity Komenského BRATISLAVA. Diplomová práca. Martin Plesch
 Fakulta matematiky fyziky a informatiky Univerzity Komenského BRATISLAVA Diplomová práca Martin Plesch BRATISLAVA 001 Fakulta matematiky fyziky a informatiky Univerzity Komenského BRATISLAVA Katedra teoretickej
Fakulta matematiky fyziky a informatiky Univerzity Komenského BRATISLAVA Diplomová práca Martin Plesch BRATISLAVA 001 Fakulta matematiky fyziky a informatiky Univerzity Komenského BRATISLAVA Katedra teoretickej
Aplikace matematiky. Recense. Terms of use: Aplikace matematiky, Vol. 2 (1957), No. 5, Persistent URL:
, No. 5, Persistent URL:") Aplikace matematiky Recense Aplikace matematiky, Vol. 2 (1957), No. 5, 398 407 Persistent URL: http://dml.cz/dmlcz/102589 Terms of use: Institute of Mathematics AS CR, 1957 Institute of Mathematics of
Aplikace matematiky Recense Aplikace matematiky, Vol. 2 (1957), No. 5, 398 407 Persistent URL: http://dml.cz/dmlcz/102589 Terms of use: Institute of Mathematics AS CR, 1957 Institute of Mathematics of
Ján Pribiš. Edícia vysokoškolských učebníc. Fakulta elektrotechniky a informatiky. Technická univerzita v Košiciach SCILAB
 Edícia vysokoškolských učebníc Fakulta elektrotechniky a informatiky Technická univerzita v Košiciach SCILAB Ján Pribiš SCILAB c Ján Pribiš Edícia vysokoškolských učebníc FEI TU v Košiciach Prvé vydanie
Edícia vysokoškolských učebníc Fakulta elektrotechniky a informatiky Technická univerzita v Košiciach SCILAB Ján Pribiš SCILAB c Ján Pribiš Edícia vysokoškolských učebníc FEI TU v Košiciach Prvé vydanie
UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY
 UIVERZITA KOMESKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY A IFORMATIKY VÝPOČET FOURIEROVÝCH RADOV POMOCOU DISKRÉTEJ FOURIEROVEJ TRASFORMÁCIE BAKALÁRSKA PRÁCA 2013 Andrej ZUBAL UIVERZITA KOMESKÉHO V BRATISLAVE
UIVERZITA KOMESKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY A IFORMATIKY VÝPOČET FOURIEROVÝCH RADOV POMOCOU DISKRÉTEJ FOURIEROVEJ TRASFORMÁCIE BAKALÁRSKA PRÁCA 2013 Andrej ZUBAL UIVERZITA KOMESKÉHO V BRATISLAVE
GRAFICKÉ ZOBRAZENIE MATEMATICKÝCH FUNKCIÍ DRAWING OF MATHEMATICS FUNCTIONS GRAPHS
 GRAFICKÉ ZOBRAZENIE MATEMATICKÝCH FUNKCIÍ DRAWING OF MATHEMATICS FUNCTIONS GRAPHS Dana ORSZÁGHOVÁ (SR) ABSTRACT Graphs of functions are the topic that is the part of mathematics study. The graphics software
GRAFICKÉ ZOBRAZENIE MATEMATICKÝCH FUNKCIÍ DRAWING OF MATHEMATICS FUNCTIONS GRAPHS Dana ORSZÁGHOVÁ (SR) ABSTRACT Graphs of functions are the topic that is the part of mathematics study. The graphics software
FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY UNIVERZITY KOMENSKÉHO V BRATISLAVE
 FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY UNIVERZITY KOMENSKÉHO V BRATISLAVE PÍSOMNÁ PRÁCA K DIZERTAČNEJ SKÚŠKE 2005 Zuzana Holeščáková FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY UNIVERZITY KOMENSKÉHO V BRATISLAVE
FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY UNIVERZITY KOMENSKÉHO V BRATISLAVE PÍSOMNÁ PRÁCA K DIZERTAČNEJ SKÚŠKE 2005 Zuzana Holeščáková FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY UNIVERZITY KOMENSKÉHO V BRATISLAVE
NEISTOTY. Základné pojmy a definície z oblasti neistôt meraní
 NEISTOTY Základné pojmy a definície z oblasti neistôt meraní Ladislav Ševčovič Košice 23. septembra 2007 OBSAH 1 Základné pojmy a definície z oblasti neistôt meraní 3 2 Chyby elektrických meracích prístrojov
NEISTOTY Základné pojmy a definície z oblasti neistôt meraní Ladislav Ševčovič Košice 23. septembra 2007 OBSAH 1 Základné pojmy a definície z oblasti neistôt meraní 3 2 Chyby elektrických meracích prístrojov
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Low-level Image Processing
 Low-level Image Processing In-Place Covariance Operators for Computer Vision Terry Caelli and Mark Ollila School of Computing, Curtin University of Technology, Perth, Western Australia, Box U 1987, Emaihtmc@cs.mu.oz.au
Low-level Image Processing In-Place Covariance Operators for Computer Vision Terry Caelli and Mark Ollila School of Computing, Curtin University of Technology, Perth, Western Australia, Box U 1987, Emaihtmc@cs.mu.oz.au
Today s lecture. Local neighbourhood processing. The convolution. Removing uncorrelated noise from an image The Fourier transform
 Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems
![Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems](/thumbs/74/71250091.jpg "Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems") Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems 1 Image as a sum of basic images What if every person s portrait photo could be expressed
Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems 1 Image as a sum of basic images What if every person s portrait photo could be expressed
Image procesing. Počítačové videnie
 Počítačové videnie Počítačové videnie je disciplína, ktorá sa snaží počítačovými prostriedkami napodobniť ľudské videnie: vizuálny (vnemový, zrakový) kognitívny (poznávací) systém. Predmetom PV je obrazová
Počítačové videnie Počítačové videnie je disciplína, ktorá sa snaží počítačovými prostriedkami napodobniť ľudské videnie: vizuálny (vnemový, zrakový) kognitívny (poznávací) systém. Predmetom PV je obrazová
DIPLOMOVÁ PRÁCE. Peter Baník Metody optimalizace ve financích
 Univerzita Karlova v Praze Matematicko-fyzikální fakulta DIPLOMOVÁ PRÁCE Peter Baník Metody optimalizace ve financích Katedra pravděpodobnosti a matematické statistiky Vedoucí diplomové práce: Doc. RNDr.
Univerzita Karlova v Praze Matematicko-fyzikální fakulta DIPLOMOVÁ PRÁCE Peter Baník Metody optimalizace ve financích Katedra pravděpodobnosti a matematické statistiky Vedoucí diplomové práce: Doc. RNDr.
UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY
 UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY MOCNINOVÉ RADY A ICH VYUšITIE BAKALÁRSKA PRÁCA 04 Sára MINÁROVÁ UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY
UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY MOCNINOVÉ RADY A ICH VYUšITIE BAKALÁRSKA PRÁCA 04 Sára MINÁROVÁ UNIVERZITA KOMENSKÉHO V BRATISLAVE FAKULTA MATEMATIKY, FYZIKY
Digital Image Processing. Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 2009
 Bu-Ali Sina University Computer Engineering Dep. Fall 2009") Digital Image Processing Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 009 Outline Image Enhancement in Spatial Domain Spatial Filtering Smoothing Filters Median Filter
Digital Image Processing Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 009 Outline Image Enhancement in Spatial Domain Spatial Filtering Smoothing Filters Median Filter
Image Segmentation: Definition Importance. Digital Image Processing, 2nd ed. Chapter 10 Image Segmentation.
 : Definition Importance Detection of Discontinuities: 9 R = wi z i= 1 i Point Detection: 1. A Mask 2. Thresholding R T Line Detection: A Suitable Mask in desired direction Thresholding Line i : R R, j
: Definition Importance Detection of Discontinuities: 9 R = wi z i= 1 i Point Detection: 1. A Mask 2. Thresholding R T Line Detection: A Suitable Mask in desired direction Thresholding Line i : R R, j
Local Enhancement. Local enhancement
 Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
GENEROVANIE STABILNÝCH MODELOV VYUŽÍVANÍM CUDA TECHNOLÓGIE
 UNIVERZITA KOMENSKÉHO FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY KATEDRA INFORMATIKY GENEROVANIE STABILNÝCH MODELOV VYUŽÍVANÍM CUDA TECHNOLÓGIE BAKALÁRSKA PRÁCA PETER CIEKER Štúdijný odbor : Vedúci : 9.2.1
UNIVERZITA KOMENSKÉHO FAKULTA MATEMATIKY, FYZIKY A INFORMATIKY KATEDRA INFORMATIKY GENEROVANIE STABILNÝCH MODELOV VYUŽÍVANÍM CUDA TECHNOLÓGIE BAKALÁRSKA PRÁCA PETER CIEKER Štúdijný odbor : Vedúci : 9.2.1
Platforma průmyslové spolupráce
 Platforma průmyslové spolupráce CZ.1.07/2.4.00/17.0041 Název Operátory pro zpracování proudů dat Popis a využití práce s operátory v jazyce Esper pro Java Benchmarking výuka: pokročilá Java Jazyk textu
Platforma průmyslové spolupráce CZ.1.07/2.4.00/17.0041 Název Operátory pro zpracování proudů dat Popis a využití práce s operátory v jazyce Esper pro Java Benchmarking výuka: pokročilá Java Jazyk textu
Kybernetika. Peter Hudzovič Súčasná kontrola stability a kvality impulznej regulácie. Terms of use:
 Kybernetika Peter Hudzovič Súčasná kontrola stability a kvality impulznej regulácie Kybernetika, Vol. 3 (1967), No. 2, (175)--194 Persistent URL: http://dml.cz/dmlcz/125051 Terms of use: Institute of Information
Kybernetika Peter Hudzovič Súčasná kontrola stability a kvality impulznej regulácie Kybernetika, Vol. 3 (1967), No. 2, (175)--194 Persistent URL: http://dml.cz/dmlcz/125051 Terms of use: Institute of Information
ELEKTRÓNOVÁ ŠTRUKTÚRA A TRANSPORTNÉ VLASTNOSTI ULTRATENKÝCH ROZHRANÍ NA BÁZE Al/AlO x
 FAKULTA ELEKTROTECHNIKY A INFORMATIKY STU V BRATISLAVE Ing. Miroslava Zemanová Diešková ELEKTRÓNOVÁ ŠTRUKTÚRA A TRANSPORTNÉ VLASTNOSTI ULTRATENKÝCH ROZHRANÍ NA BÁZE Al/AlO x Dizertačná práca Vedúci dizertačnej
FAKULTA ELEKTROTECHNIKY A INFORMATIKY STU V BRATISLAVE Ing. Miroslava Zemanová Diešková ELEKTRÓNOVÁ ŠTRUKTÚRA A TRANSPORTNÉ VLASTNOSTI ULTRATENKÝCH ROZHRANÍ NA BÁZE Al/AlO x Dizertačná práca Vedúci dizertačnej
Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ]
![Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ]](/thumbs/77/75889528.jpg "Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ]") CEE 615: Digital Image Processing Spatial Enhancements 1 Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ] Template (Windowing) Operations Template (window, box, kernel)
CEE 615: Digital Image Processing Spatial Enhancements 1 Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ] Template (Windowing) Operations Template (window, box, kernel)
Suppose we have a one-dimensional discrete signal f(x). The convolution of f with a kernel g is defined as h(x) = f(x)*g(x) = w 1. f(i)g(x i), (3.
. The convolution of f with a kernel g is defined as h(x) = f(x)*g(x) = w 1. f(i)g(x i), (3.") Chapter 3 Image filtering Filtering an image involves transforming the values of the pixels by taking into account the values of the neighboring pixels. Filtering is a basic concept of signal and image
Chapter 3 Image filtering Filtering an image involves transforming the values of the pixels by taking into account the values of the neighboring pixels. Filtering is a basic concept of signal and image
Fakulta Matematiky, Fyziky a Informatiky Univerzita Komenského, Bratislava THEILOVA REGRESIA
 Fakulta Matematiky, Fyziky a Informatiky Univerzita Komenského, Bratislava THEILOVA REGRESIA Róbert Tóth Bratislava 2013 Fakulta Matematiky, Fyziky a Informatiky Univerzita Komenského, Bratislava THEILOVA
Fakulta Matematiky, Fyziky a Informatiky Univerzita Komenského, Bratislava THEILOVA REGRESIA Róbert Tóth Bratislava 2013 Fakulta Matematiky, Fyziky a Informatiky Univerzita Komenského, Bratislava THEILOVA
Dokonalé a spriatelené čísla
 Dokonalé a spriatelené čísla 1. kapitola. Niektoré poznatky z teorie čísel In: Tibor Šalát (author): Dokonalé a spriatelené čísla. (Slovak). Praha: Mladá fronta, 1969. pp. 5 17. Persistent URL: http://dml.cz/dmlcz/403668
Dokonalé a spriatelené čísla 1. kapitola. Niektoré poznatky z teorie čísel In: Tibor Šalát (author): Dokonalé a spriatelené čísla. (Slovak). Praha: Mladá fronta, 1969. pp. 5 17. Persistent URL: http://dml.cz/dmlcz/403668
Kompresia dát a jej použitie
 Kompresia dát a jej použitie alebo Veľa muziky na malom diskovom priestore Záverečná práca Peter Vook Univerzita Karlova v Praze Matematicko-fyzikální fakulta 0 1 Reálna situácia alebo Zo života Anička
Kompresia dát a jej použitie alebo Veľa muziky na malom diskovom priestore Záverečná práca Peter Vook Univerzita Karlova v Praze Matematicko-fyzikální fakulta 0 1 Reálna situácia alebo Zo života Anička
NÁVOD NA VYJADROVANIE NEISTOTY V KVANTITATÍVNYCH SKÚŠKACH (EA - 4/16: 2003)
") SLOVENSKÁ NÁRODNÁ AKREDITAČNÁ SLUŽBA METODICKÁ SMERNICA NA AKREDITÁCIU METHODICAL GUIDELINE FOR ACCREDITATION NÁVOD NA VYJADROVANIE NEISTOTY V KVANTITATÍVNYCH SKÚŠKACH (EA - 4/16: 2003) GUIDELINES ON THE
SLOVENSKÁ NÁRODNÁ AKREDITAČNÁ SLUŽBA METODICKÁ SMERNICA NA AKREDITÁCIU METHODICAL GUIDELINE FOR ACCREDITATION NÁVOD NA VYJADROVANIE NEISTOTY V KVANTITATÍVNYCH SKÚŠKACH (EA - 4/16: 2003) GUIDELINES ON THE
Feature detection.
 Feature detection Kim Steenstrup Pedersen kimstp@itu.dk The IT University of Copenhagen Feature detection, The IT University of Copenhagen p.1/20 What is a feature? Features can be thought of as symbolic
Feature detection Kim Steenstrup Pedersen kimstp@itu.dk The IT University of Copenhagen Feature detection, The IT University of Copenhagen p.1/20 What is a feature? Features can be thought of as symbolic
Optimálne riadenie. Viacetapové rozhodovacie procesy v ekonómii a financiách. Margaréta Halická Pavel Brunovský Pavol Jurča
 Optimálne riadenie Viacetapové rozhodovacie procesy v ekonómii a financiách Margaréta Halická Pavel Brunovský Pavol Jurča EPOS Bratislava 2009 Kniha predstavuje komplexný výklad teórie optimálneho rozhodovania
Optimálne riadenie Viacetapové rozhodovacie procesy v ekonómii a financiách Margaréta Halická Pavel Brunovský Pavol Jurča EPOS Bratislava 2009 Kniha predstavuje komplexný výklad teórie optimálneho rozhodovania