- Marine Hydrodynamics. Lecture 14. F, M = [linear function of m ij ] [function of instantaneous U, U, Ω] not of motion history.
|
|
|
- Gloria Briggs
- 6 years ago
- Views:
Transcription
1 Marine Hydrodynamics, Spring 2005 ecture Marine Hydrodynamics ecture Some Properties of Added-Mass Coefficients 1. m ij = ρ [function of geometry only] F, M = [linear function of m ij ] [function of instantaneous U, U, Ω] not of motion history 2. Relationship to fluid momentum. F(t) where we define Φ to denote the velocity potential that corresponds to unit velocity U = 1. In this case the velocity potential φ for an arbitrary velocity U is φ = UΦ. The linear momentum in the fluid is given by = ρ vdv = ρ φdv = + ρφˆ nds V V Green s B theorem x (t = T ) = ρuφn x ds = U ρφn x ds }{{} φ 0 at B B The force exerted on the fluid from the body is F (t) = ( m A U )= m A U. 1
2 T T Newton s aw T dt [ F (t)] = m A Udt = m A U] }{{ 0 = x (t = T ) x (t = 0)= U ρφn x ds } 0 0 m A U B Therefore, m A = total fluid momentum for a body moving at U = 1 (regardless of how we get there from rest) = fluid momentum per unit velocity of body. K.B.C. φ = φ nˆ =(U, 0, 0) nˆ = Un x, φ = Un x UΦ = Un x n n n n Φ m A = ρ Φ ds n B Φ = n x For general 6 DOF: Φ j m ji = ρ Φ i n j ds = ρ Φ i ds = j fluid momentum due to }{{}}{{} n i body motion j force/moment B potential due to body B i direction of motion moving with U i =1 3. Symmetry of added mass matrix m ij = m ji. ( ) Φ j m ji = ρ Φ i ds = ρ Φ i ( Φ j nˆ)ds = ρ (Φ i Φ j ) dv n B = ρ Φ i Φ j +Φ i 2 Φ }{{} j dv V =0 B Divergence Theorem V Therefore, m ji = ρ V Φ i Φ j dv = m ij 2
3 4. Relationship to the kinetic energy of the fluid. For a general 6 DoF body motion U i =(U 1,U 2,...,U 6 ), φ = U }{{} i Φ i ;Φ i = potential for U i =1 notation 1 1 K.E. = ρ φ φdv = 2 ρ U i Φ i U j Φ j dv 2 V V 1 = ρu i U j Φ i Φ j dv = 1m 2 2 iju i U j K.E. depends only on m ij and instantaneous U i. V 5. Symmetry simplifies m ij. From 36 21?. Choose such coordinate system symmetry that some m ij = 0 by symmetry. Example 1 Port-starboard symmetry. m11 m m 16 F x m m 26 F y m 33 m 34 m 0 F m 35 z ij = m 44 m 45 0 M x m 55 0 M y m 66 M z 12 independent coefficients U 1 U 2 U 3 Ω 1 Ω 2 Ω 3 3
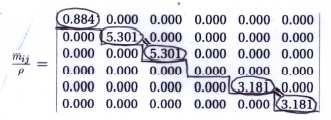
4 Example 2 Rotational or axi-symmetry with respect to x 1 axis. m ij = m m m 35 m 22 0 m m 55 0 m 55 where m 22 = m 33,m 55 = m 66 and m 26 = m 35, so 4 different coefficients Exercise How about 3 planes of symmetry (e.g. a cuboid); a cube; a sphere?? Work out the details. 4
5 3.21 Slender Body Approximation Definitions (a) Slender Body = a body whose characteristic length in the longitudinal direction is considerably larger than the body s characteristic length in the other two directions. (b) m ij = the 3D added mass coefficient in the i th direction due to a unit acceleration in the j th direction. The subscripts i, j run from 1 to 6. (c) M kl = the 2D added mass coefficient in the k th direction due to a unit acceleration in the l th direction. The subscripts k, l take the values 2,3 and 4. x 2 x 5 x 2 O x x 1 x x 3 4 x 4 x 6 x 3 Goal To estimate the added mass coefficients m ij fora3d slender body. Idea Estimate m ij of a slender 3D body using the 2D sectional added mass coefficients (strip-wise M kl ). In particular, for simple shapes like long cylinders, we will use known 2D coefficients to find unknown 3D coefficients. m ij = [M kl (x) contributions] 3D 2D Discussion If the 1-axis is the longitudinal axis of the slender body, then the 3D added mass coefficients m ij are calculated by summing the added mass coefficients of all the thin slices which are perpendicular to the 1-axis, M kl. This means that forces in 1-direction cannot be obtained by slender body theory. 5
6 Procedure In order to calculate the 3D added mass coefficients m ij we need to: 1. Determine the 2D acceleration of each crossection for a unit acceleration in the i th direction, 2. Multiply the 2D acceleration by the appropriate 2D added mass coefficient to get the force on that section in the j th direction, and 3. Integrate these forces over the length of the body. Examples Sway force due to sway acceleration Assume a unit sway acceleration u 3 = 1 and all other u j,u j = 0, with j = 1, 2, 4, 5, 6. It then follows from the expressions for the generalized forces and moments (ecture 12, JNN 4.13) that the sway force on the body is given by f 3 = m 33 u 3 = m 33 m 33 = f 3 = F 3 (x)dx A unit 3 acceleration in 3D results to a unit acceleration in the 3 direction of each 2D slice (U 3 = u 3 = 1). The hydrodynamic force on each slice is then given by F 3 (x) = M 33 (x)u 3 = M 33 (x) Putting everything together, we obtain m 33 = M 33 (x)dx = M 33 (x)dx Sway force due to yaw acceleration Assume a unit yaw acceleration u 5 = 1 and all other u j,u j = 0, with j = 1, 2, 3, 4, 6. It then follows from the expressions for the generalized forces and moments that the sway force on the body is given by f 3 = m 35 u 5 = m 35 m 35 = f 3 = F 3 (x)dx For each 2D slice, a distance x from the origin, a unit 5 acceleration in 3D, results to a unit acceleration in the -3 direction times the moment arm x (U 3 = xu 5 = x). The hydrodynamic force on each slice is then given by F 3 (x) = M 33 (x)u 3 = xm 33 (x) 6
7 Putting everything together, we obtain m 35 = xm 33 (x)dx Yaw moment due to yaw acceleration Assume a unit yaw acceleration u 5 = 1 and all other u j,u j = 0, with j = 1, 2, 3, 4, 6. It then follows from the expressions for the generalized forces and moments that the yaw force on the body is given by f 5 = m 55 u 5 = m 55 m 55 = f 5 = F 5 (x)dx For each 2D slice, a distance x from the origin, a unit 5 acceleration in 3D, results to a unit acceleration in the -3 direction times the moment arm x (U 3 = xu 5 = x). The hydrodynamic force on each slice is then given by F 3 (x) = M 33 (x)u 3 = xm 33 (x) However, each force F 3 (x) produces a negative moment at the origin about the 5 axis F 5 (x) = xf 3 (x) Putting everything together, we obtain m 55 = x 2 M 33 (x)dx In the same manner we can estimate the remaining added mass coefficients m ij - noting that added mass coefficients related to the 1-axis cannot be obtained by slender body theory. 7
8 In summary, the 3D added mass coefficients are shown in the following table. The empty boxes may be filled in by symmetry. m 22 = M 22 dx m 23 = M 23 dx m 24 = M 24 dx m 25 = xm 23 dx m 26 = xm 22 dx m 33 = M 33 dx m 34 = M 34 dx m 35 = xm 33 dx m 36 = xm 32 dx m 44 = M 44 dx m 45 = xm 34 dx m 46 = xm 24 dx m 55 = x 2 M 33 dx m 56 = x 2 M 32 dx m 66 = x 2 M 22 dx 8
9 3.22 Buoyancy Effects Due to Accelerating Flow Example Force on a stationary sphere in a fluid that is accelerated against it. Then, 3 a φ (r, θ, t) = U (t) r + cos θ }{{} 2r 2 dipole for sphere φ = U 3a cos θ t r=a 2 ( ) 3 φ r=a = 0, U sin θ, φ 2 = U 2 sin 2 θ 2 r=a 8 π [ ] F x =( ρ) ( 2πr ) 2 dθ sin θ ( cos θ) U 3a cos θ + 9 U 2 sin 2 θ 2 8 π π = U 3πρa 3 dθ sin θ cos 2 θ +ρu 2 9π a 2 dθ cos θ sin 3 θ }{{}}{{} ( ) F x = U ρ 2πa 3 }{{} 0 4 πa 3 ρ + 2 πa 3 ρ 3 3 =ρ =2/3 =0 9
10 Part of F x is due to the pressure gradient which must be present to cause the fluid to accelerate: U U U U 1 p x-momentum, noting U = U (t) : + U + v + w = (ignore gravity) t }{{} x y z ρ x }{{}}{{} dp = ρu for uniform (1D) accelerated flow dx Force on the body due to the pressure field F = pnds ˆ = pdv ; F x = B V B V B p dv = ρ U x Buoyancy force due to pressure gradient = ρ U 10
11 Analogue: Buoyancy force due to hydrostatic pressure gradient. Gravitational acceleration g U = fluid acceleration. p s = ρgy Summary: Total force on a fixed sphere in an accelerated flow ( ) F x = U ρ + m (1) = U 3 2 ρ = 3 Um }{{} (1) }{{} p s = ρgĵ F s = ρg ĵ Buoyancy added mass 1 ρ 2 In general, for any body in an accelerated flow: F x = F buoyany + Um (1), Archimedes principle where m (1) is the added mass in still water (from now on, m) F x Added mass coefficient = Um for body acceleration with U m c m = ρ in the presence of accelerated flow C m =1+c m 11

 12")

 7")
12 Appendix A: More examples on symmetry of added mass tensor Symmetry with respect to Y (= X-Z plane symmetry) 12 non-zero, independent coefficients Symmetry with respect to X and Y (= Y-Z and X-Z plane symmetry) 7 non-zero, independent coefficients 12


 3")
13 Axisymmetric with respect to X-axis 4 non-zero, independent coefficients Axisymmetric with respect to X axis and X (= Y-Z plane symmetry) 3 non-zero, independent coefficients 13
3.5 Vorticity Equation
 .0 - Marine Hydrodynamics, Spring 005 Lecture 9.0 - Marine Hydrodynamics Lecture 9 Lecture 9 is structured as follows: In paragraph 3.5 we return to the full Navier-Stokes equations (unsteady, viscous
.0 - Marine Hydrodynamics, Spring 005 Lecture 9.0 - Marine Hydrodynamics Lecture 9 Lecture 9 is structured as follows: In paragraph 3.5 we return to the full Navier-Stokes equations (unsteady, viscous
Vorticity Equation Marine Hydrodynamics Lecture 9. Return to viscous incompressible flow. N-S equation: v. Now: v = v + = 0 incompressible
 13.01 Marine Hydrodynamics, Fall 004 Lecture 9 Copyright c 004 MIT - Department of Ocean Engineering, All rights reserved. Vorticity Equation 13.01 - Marine Hydrodynamics Lecture 9 Return to viscous incompressible
13.01 Marine Hydrodynamics, Fall 004 Lecture 9 Copyright c 004 MIT - Department of Ocean Engineering, All rights reserved. Vorticity Equation 13.01 - Marine Hydrodynamics Lecture 9 Return to viscous incompressible
Integration is the reverse of the process of differentiation. In the usual notation. k dx = kx + c. kx dx = 1 2 kx2 + c.
 PHYS122 - Electricity and Magnetism Integration Reminder Integration is the reverse of the process of differentiation. In the usual notation f (x)dx = f(x) + constant The derivative of the RHS gives you
PHYS122 - Electricity and Magnetism Integration Reminder Integration is the reverse of the process of differentiation. In the usual notation f (x)dx = f(x) + constant The derivative of the RHS gives you
On the evaluation quadratic forces on stationary bodies
 On the evaluation quadratic forces on stationary bodies Chang-Ho Lee AMIT Inc., Chestnut Hill MA, USA June 9, 006 Abstract. Conservation of momentum is applied to finite fluid volume surrounding a body
On the evaluation quadratic forces on stationary bodies Chang-Ho Lee AMIT Inc., Chestnut Hill MA, USA June 9, 006 Abstract. Conservation of momentum is applied to finite fluid volume surrounding a body
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2)
") PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
Models of ocean circulation are all based on the equations of motion.
 Equations of motion Models of ocean circulation are all based on the equations of motion. Only in simple cases the equations of motion can be solved analytically, usually they must be solved numerically.
Equations of motion Models of ocean circulation are all based on the equations of motion. Only in simple cases the equations of motion can be solved analytically, usually they must be solved numerically.
Solutions to PS 2 Physics 201
 Solutions to PS Physics 1 1. ke dq E = i (1) r = i = i k eλ = i k eλ = i k eλ k e λ xdx () (x x) (x x )dx (x x ) + x dx () (x x ) x ln + x x + x x (4) x + x ln + x (5) x + x To find the field for x, we
Solutions to PS Physics 1 1. ke dq E = i (1) r = i = i k eλ = i k eλ = i k eλ k e λ xdx () (x x) (x x )dx (x x ) + x dx () (x x ) x ln + x x + x x (4) x + x ln + x (5) x + x To find the field for x, we
φ(r, θ, t) = a 2 U(t) cos θ. (7.1)
 = a 2 U(t) cos θ. (7.1)") BioFluids Lectures 7-8: Slender Fish Added Mass for Lateral Motion At high Reynolds number, most of the effort required in swimming is pushing water out of the way, that is our energy goes in providing
BioFluids Lectures 7-8: Slender Fish Added Mass for Lateral Motion At high Reynolds number, most of the effort required in swimming is pushing water out of the way, that is our energy goes in providing
Single Particle Motion
 Single Particle Motion C ontents Uniform E and B E = - guiding centers Definition of guiding center E gravitation Non Uniform B 'grad B' drift, B B Curvature drift Grad -B drift, B B invariance of µ. Magnetic
Single Particle Motion C ontents Uniform E and B E = - guiding centers Definition of guiding center E gravitation Non Uniform B 'grad B' drift, B B Curvature drift Grad -B drift, B B invariance of µ. Magnetic
Problem 1 Problem 2 Problem 3 Problem 4 Total
 Name Section THE PENNSYLVANIA STATE UNIVERSITY Department of Engineering Science and Mechanics Engineering Mechanics 12 Final Exam May 5, 2003 8:00 9:50 am (110 minutes) Problem 1 Problem 2 Problem 3 Problem
Name Section THE PENNSYLVANIA STATE UNIVERSITY Department of Engineering Science and Mechanics Engineering Mechanics 12 Final Exam May 5, 2003 8:00 9:50 am (110 minutes) Problem 1 Problem 2 Problem 3 Problem
x+ y = 50 Dividing both sides by 2 : ( ) dx By (7.2), x = 25m gives maximum area. Substituting this value into (*):
 dx By (7.2), x = 25m gives maximum area. Substituting this value into (*):") Solutions 7(b 1 Complete solutions to Exercise 7(b 1. Since the perimeter 100 we have x+ y 100 [ ] ( x+ y 50 ividing both sides by : y 50 x * The area A xy, substituting y 50 x gives: A x( 50 x A 50x x
Solutions 7(b 1 Complete solutions to Exercise 7(b 1. Since the perimeter 100 we have x+ y 100 [ ] ( x+ y 50 ividing both sides by : y 50 x * The area A xy, substituting y 50 x gives: A x( 50 x A 50x x
Method of Images
 . - Marine Hdrodnamics, Spring 5 Lecture 11. - Marine Hdrodnamics Lecture 11 3.11 - Method of Images m Potential for single source: φ = ln + π m ( ) Potential for source near a wall: φ = m ln +( ) +ln
. - Marine Hdrodnamics, Spring 5 Lecture 11. - Marine Hdrodnamics Lecture 11 3.11 - Method of Images m Potential for single source: φ = ln + π m ( ) Potential for source near a wall: φ = m ln +( ) +ln
Rational derivation of the Boussinesq approximation
 Rational derivation of the Boussinesq approximation Kiyoshi Maruyama Department of Earth and Ocean Sciences, National Defense Academy, Yokosuka, Kanagawa 239-8686, Japan February 22, 2019 Abstract This
Rational derivation of the Boussinesq approximation Kiyoshi Maruyama Department of Earth and Ocean Sciences, National Defense Academy, Yokosuka, Kanagawa 239-8686, Japan February 22, 2019 Abstract This
Sample Final Questions: Solutions Math 21B, Winter y ( y 1)(1 + y)) = A y + B
(1 + y)) = A y + B") Sample Final Questions: Solutions Math 2B, Winter 23. Evaluate the following integrals: tan a) y y dy; b) x dx; c) 3 x 2 + x dx. a) We use partial fractions: y y 3 = y y ) + y)) = A y + B y + C y +. Putting
Sample Final Questions: Solutions Math 2B, Winter 23. Evaluate the following integrals: tan a) y y dy; b) x dx; c) 3 x 2 + x dx. a) We use partial fractions: y y 3 = y y ) + y)) = A y + B y + C y +. Putting
Symmetries 2 - Rotations in Space
 Symmetries 2 - Rotations in Space This symmetry is about the isotropy of space, i.e. space is the same in all orientations. Thus, if we continuously rotated an entire system in space, we expect the system
Symmetries 2 - Rotations in Space This symmetry is about the isotropy of space, i.e. space is the same in all orientations. Thus, if we continuously rotated an entire system in space, we expect the system
Handout 6: Rotational motion and moment of inertia. Angular velocity and angular acceleration
 1 Handout 6: Rotational motion and moment of inertia Angular velocity and angular acceleration In Figure 1, a particle b is rotating about an axis along a circular path with radius r. The radius sweeps
1 Handout 6: Rotational motion and moment of inertia Angular velocity and angular acceleration In Figure 1, a particle b is rotating about an axis along a circular path with radius r. The radius sweeps
Dynamics. Dynamics of mechanical particle and particle systems (many body systems)
") Dynamics Dynamics of mechanical particle and particle systems (many body systems) Newton`s first law: If no net force acts on a body, it will move on a straight line at constant velocity or will stay at
Dynamics Dynamics of mechanical particle and particle systems (many body systems) Newton`s first law: If no net force acts on a body, it will move on a straight line at constant velocity or will stay at
Chapter 12: Rotation of Rigid Bodies. Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics
 Chapter 1: Rotation of Rigid Bodies Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics Translational vs Rotational / / 1/ m x v dx dt a dv dt F ma p mv KE mv Work Fd P Fv / / 1/ I
Chapter 1: Rotation of Rigid Bodies Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics Translational vs Rotational / / 1/ m x v dx dt a dv dt F ma p mv KE mv Work Fd P Fv / / 1/ I
Calculus Math 21B, Winter 2009 Final Exam: Solutions
 Calculus Math B, Winter 9 Final Exam: Solutions. (a) Express the area of the region enclosed between the x-axis and the curve y = x 4 x for x as a definite integral. (b) Find the area by evaluating the
Calculus Math B, Winter 9 Final Exam: Solutions. (a) Express the area of the region enclosed between the x-axis and the curve y = x 4 x for x as a definite integral. (b) Find the area by evaluating the
Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture No. # 02 Conservation of Mass and Momentum: Continuity and
Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture No. # 02 Conservation of Mass and Momentum: Continuity and
6.2 Governing Equations for Natural Convection
 6. Governing Equations for Natural Convection 6..1 Generalized Governing Equations The governing equations for natural convection are special cases of the generalized governing equations that were discussed
6. Governing Equations for Natural Convection 6..1 Generalized Governing Equations The governing equations for natural convection are special cases of the generalized governing equations that were discussed
Shell Balances in Fluid Mechanics
 Shell Balances in Fluid Mechanics R. Shankar Subramanian Department of Chemical and Biomolecular Engineering Clarkson University When fluid flow occurs in a single direction everywhere in a system, shell
Shell Balances in Fluid Mechanics R. Shankar Subramanian Department of Chemical and Biomolecular Engineering Clarkson University When fluid flow occurs in a single direction everywhere in a system, shell
Chapter 1. Governing Equations of GFD. 1.1 Mass continuity
 Chapter 1 Governing Equations of GFD The fluid dynamical governing equations consist of an equation for mass continuity, one for the momentum budget, and one or more additional equations to account for
Chapter 1 Governing Equations of GFD The fluid dynamical governing equations consist of an equation for mass continuity, one for the momentum budget, and one or more additional equations to account for
Electromagnetic Field Theory (EMT)
") Electromagnetic Field Theory (EMT) Lecture # 9 1) Coulomb s Law and Field Intensity 2) Electric Fields Due to Continuous Charge Distributions Line Charge Surface Charge Volume Charge Coulomb's Law Coulomb's
Electromagnetic Field Theory (EMT) Lecture # 9 1) Coulomb s Law and Field Intensity 2) Electric Fields Due to Continuous Charge Distributions Line Charge Surface Charge Volume Charge Coulomb's Law Coulomb's
1 POTENTIAL FLOW THEORY Formulation of the seakeeping problem
 1 POTENTIAL FLOW THEORY Formulation of the seakeeping problem Objective of the Chapter: Formulation of the potential flow around the hull of a ship advancing and oscillationg in waves Results of the Chapter:
1 POTENTIAL FLOW THEORY Formulation of the seakeeping problem Objective of the Chapter: Formulation of the potential flow around the hull of a ship advancing and oscillationg in waves Results of the Chapter:
Note: Each problem is worth 14 points except numbers 5 and 6 which are 15 points. = 3 2
 Math Prelim II Solutions Spring Note: Each problem is worth points except numbers 5 and 6 which are 5 points. x. Compute x da where is the region in the second quadrant between the + y circles x + y and
Math Prelim II Solutions Spring Note: Each problem is worth points except numbers 5 and 6 which are 5 points. x. Compute x da where is the region in the second quadrant between the + y circles x + y and
From the last time, we ended with an expression for the energy equation. u = ρg u + (τ u) q (9.1)
 q (9.1)") Lecture 9 9. Administration None. 9. Continuation of energy equation From the last time, we ended with an expression for the energy equation ρ D (e + ) u = ρg u + (τ u) q (9.) Where ρg u changes in potential
Lecture 9 9. Administration None. 9. Continuation of energy equation From the last time, we ended with an expression for the energy equation ρ D (e + ) u = ρg u + (τ u) q (9.) Where ρg u changes in potential
Kinetic Energy and Work
 Kinetic Energy and Work 8.01 W06D1 Today s Readings: Chapter 13 The Concept of Energy and Conservation of Energy, Sections 13.1-13.8 Announcements Problem Set 4 due Week 6 Tuesday at 9 pm in box outside
Kinetic Energy and Work 8.01 W06D1 Today s Readings: Chapter 13 The Concept of Energy and Conservation of Energy, Sections 13.1-13.8 Announcements Problem Set 4 due Week 6 Tuesday at 9 pm in box outside
Lecture 21 Gravitational and Central Forces
 Lecture 21 Gravitational and Central Forces 21.1 Newton s Law of Universal Gravitation According to Newton s Law of Universal Graviation, the force on a particle i of mass m i exerted by a particle j of
Lecture 21 Gravitational and Central Forces 21.1 Newton s Law of Universal Gravitation According to Newton s Law of Universal Graviation, the force on a particle i of mass m i exerted by a particle j of
Lecture 3: 1. Lecture 3.
 Lecture 3: 1 Lecture 3. Lecture 3: 2 Plan for today Summary of the key points of the last lecture. Review of vector and tensor products : the dot product (or inner product ) and the cross product (or vector
Lecture 3: 1 Lecture 3. Lecture 3: 2 Plan for today Summary of the key points of the last lecture. Review of vector and tensor products : the dot product (or inner product ) and the cross product (or vector
Chapter 11. Angular Momentum
 Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
Department of Physics
 Department of Physics PHYS101-051 FINAL EXAM Test Code: 100 Tuesday, 4 January 006 in Building 54 Exam Duration: 3 hrs (from 1:30pm to 3:30pm) Name: Student Number: Section Number: Page 1 1. A car starts
Department of Physics PHYS101-051 FINAL EXAM Test Code: 100 Tuesday, 4 January 006 in Building 54 Exam Duration: 3 hrs (from 1:30pm to 3:30pm) Name: Student Number: Section Number: Page 1 1. A car starts
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik. Robot Dynamics. Dr.-Ing. John Nassour J.
 Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Physics 451/551 Theoretical Mechanics. G. A. Krafft Old Dominion University Jefferson Lab Lecture 18
 Physics 451/551 Theoretical Mechanics G. A. Krafft Old Dominion University Jefferson Lab Lecture 18 Theoretical Mechanics Fall 018 Properties of Sound Sound Waves Requires medium for propagation Mainly
Physics 451/551 Theoretical Mechanics G. A. Krafft Old Dominion University Jefferson Lab Lecture 18 Theoretical Mechanics Fall 018 Properties of Sound Sound Waves Requires medium for propagation Mainly
General Definition of Torque, final. Lever Arm. General Definition of Torque 7/29/2010. Units of Chapter 10
 Units of Chapter 10 Determining Moments of Inertia Rotational Kinetic Energy Rotational Plus Translational Motion; Rolling Why Does a Rolling Sphere Slow Down? General Definition of Torque, final Taking
Units of Chapter 10 Determining Moments of Inertia Rotational Kinetic Energy Rotational Plus Translational Motion; Rolling Why Does a Rolling Sphere Slow Down? General Definition of Torque, final Taking
5.1 Fluid momentum equation Hydrostatics Archimedes theorem The vorticity equation... 42
 Chapter 5 Euler s equation Contents 5.1 Fluid momentum equation........................ 39 5. Hydrostatics................................ 40 5.3 Archimedes theorem........................... 41 5.4 The
Chapter 5 Euler s equation Contents 5.1 Fluid momentum equation........................ 39 5. Hydrostatics................................ 40 5.3 Archimedes theorem........................... 41 5.4 The
Meteorology 6150 Cloud System Modeling
 Meteorology 6150 Cloud System Modeling Steve Krueger Spring 2009 1 Fundamental Equations 1.1 The Basic Equations 1.1.1 Equation of motion The movement of air in the atmosphere is governed by Newton s Second
Meteorology 6150 Cloud System Modeling Steve Krueger Spring 2009 1 Fundamental Equations 1.1 The Basic Equations 1.1.1 Equation of motion The movement of air in the atmosphere is governed by Newton s Second
Translational vs Rotational. m x. Connection Δ = = = = = = Δ = = = = = = Δ =Δ = = = = = 2 / 1/2. Work
 Translational vs Rotational / / 1/ Δ m x v dx dt a dv dt F ma p mv KE mv Work Fd / / 1/ θ ω θ α ω τ α ω ω τθ Δ I d dt d dt I L I KE I Work / θ ω α τ Δ Δ c t s r v r a v r a r Fr L pr Connection Translational
Translational vs Rotational / / 1/ Δ m x v dx dt a dv dt F ma p mv KE mv Work Fd / / 1/ θ ω θ α ω τ α ω ω τθ Δ I d dt d dt I L I KE I Work / θ ω α τ Δ Δ c t s r v r a v r a r Fr L pr Connection Translational
Consider a volume Ω enclosing a mass M and bounded by a surface δω. d dt. q n ds. The Work done by the body on the surroundings is
 The Energy Balance Consider a volume enclosing a mass M and bounded by a surface δ. δ At a point x, the density is ρ, the local velocity is v, and the local Energy density is U. U v The rate of change
The Energy Balance Consider a volume enclosing a mass M and bounded by a surface δ. δ At a point x, the density is ρ, the local velocity is v, and the local Energy density is U. U v The rate of change
Maxwell s equations for electrostatics
 Maxwell s equations for electrostatics October 6, 5 The differential form of Gauss s law Starting from the integral form of Gauss s law, we treat the charge as a continuous distribution, ρ x. Then, letting
Maxwell s equations for electrostatics October 6, 5 The differential form of Gauss s law Starting from the integral form of Gauss s law, we treat the charge as a continuous distribution, ρ x. Then, letting
- Marine Hydrodynamics. Lecture 4. Knowns Equations # Unknowns # (conservation of mass) (conservation of momentum)
 (conservation of momentum)") 2.20 - Marine Hydrodynamics, Spring 2005 Lecture 4 2.20 - Marine Hydrodynamics Lecture 4 Introduction Governing Equations so far: Knowns Equations # Unknowns # density ρ( x, t) Continuity 1 velocities
2.20 - Marine Hydrodynamics, Spring 2005 Lecture 4 2.20 - Marine Hydrodynamics Lecture 4 Introduction Governing Equations so far: Knowns Equations # Unknowns # density ρ( x, t) Continuity 1 velocities
JUST THE MATHS UNIT NUMBER INTEGRATION APPLICATIONS 13 (Second moments of a volume (A)) A.J.Hobson
) A.J.Hobson") JUST THE MATHS UNIT NUMBER 13.13 INTEGRATION APPLICATIONS 13 (Second moments of a volume (A)) by A.J.Hobson 13.13.1 Introduction 13.13. The second moment of a volume of revolution about the y-axis 13.13.3
JUST THE MATHS UNIT NUMBER 13.13 INTEGRATION APPLICATIONS 13 (Second moments of a volume (A)) by A.J.Hobson 13.13.1 Introduction 13.13. The second moment of a volume of revolution about the y-axis 13.13.3
ω = 0 a = 0 = α P = constant L = constant dt = 0 = d Equilibrium when: τ i = 0 τ net τ i Static Equilibrium when: F z = 0 F net = F i = ma = d P
 Equilibrium when: F net = F i τ net = τ i a = 0 = α dp = 0 = d L = ma = d P = 0 = I α = d L = 0 P = constant L = constant F x = 0 τ i = 0 F y = 0 F z = 0 Static Equilibrium when: P = 0 L = 0 v com = 0
Equilibrium when: F net = F i τ net = τ i a = 0 = α dp = 0 = d L = ma = d P = 0 = I α = d L = 0 P = constant L = constant F x = 0 τ i = 0 F y = 0 F z = 0 Static Equilibrium when: P = 0 L = 0 v com = 0
Physics Exam 1 Formulas
 INSTRUCTIONS: Write your NAME on the front of the blue exam booklet. The exam is closed book, and you may have only pens/pencils and a calculator (no stored equations or programs and no graphing). Show
INSTRUCTIONS: Write your NAME on the front of the blue exam booklet. The exam is closed book, and you may have only pens/pencils and a calculator (no stored equations or programs and no graphing). Show
Fluid Mechanics Chapter 1 Effects of pressure
 Fluid Mechanics Chapter 1 Effects of pressure last edited eptember 10, 2017 1.1 Motivation 29 1.2 Concept of pressure 29 1.2.1 The direction of pressure 29 1.2.2 Pressure on an infinitesimal volume 30
Fluid Mechanics Chapter 1 Effects of pressure last edited eptember 10, 2017 1.1 Motivation 29 1.2 Concept of pressure 29 1.2.1 The direction of pressure 29 1.2.2 Pressure on an infinitesimal volume 30
CONSERVATION OF MASS AND BALANCE OF LINEAR MOMENTUM
 CONSERVATION OF MASS AND BALANCE OF LINEAR MOMENTUM Summary of integral theorems Material time derivative Reynolds transport theorem Principle of conservation of mass Principle of balance of linear momentum
CONSERVATION OF MASS AND BALANCE OF LINEAR MOMENTUM Summary of integral theorems Material time derivative Reynolds transport theorem Principle of conservation of mass Principle of balance of linear momentum
1.2 - Stress Tensor Marine Hydrodynamics Lecture 3
 13.021 Marine Hyroynamics, Fall 2004 Lecture 3 Copyright c 2004 MIT - Department of Ocean Engineering, All rights reserve. 1.2 - Stress Tensor 13.021 Marine Hyroynamics Lecture 3 Stress Tensor τ ij:. The
13.021 Marine Hyroynamics, Fall 2004 Lecture 3 Copyright c 2004 MIT - Department of Ocean Engineering, All rights reserve. 1.2 - Stress Tensor 13.021 Marine Hyroynamics Lecture 3 Stress Tensor τ ij:. The
1 Introduction to Governing Equations 2 1a Methodology... 2
 Contents 1 Introduction to Governing Equations 2 1a Methodology............................ 2 2 Equation of State 2 2a Mean and Turbulent Parts...................... 3 2b Reynolds Averaging.........................
Contents 1 Introduction to Governing Equations 2 1a Methodology............................ 2 2 Equation of State 2 2a Mean and Turbulent Parts...................... 3 2b Reynolds Averaging.........................
Instructions: (62 points) Answer the following questions. SHOW ALL OF YOUR WORK. A B = A x B x + A y B y + A z B z = ( 1) + ( 1) ( 4) = 5
 Answer the following questions. SHOW ALL OF YOUR WORK. A B = A x B x + A y B y + A z B z = ( 1) + ( 1) ( 4) = 5") AP Physics C Fall, 2016 Work-Energy Mock Exam Name: Answer Key Mr. Leonard Instructions: (62 points) Answer the following questions. SHOW ALL OF YOUR WORK. (12 pts ) 1. Consider the vectors A = 2 î + 3
AP Physics C Fall, 2016 Work-Energy Mock Exam Name: Answer Key Mr. Leonard Instructions: (62 points) Answer the following questions. SHOW ALL OF YOUR WORK. (12 pts ) 1. Consider the vectors A = 2 î + 3
Basic concepts in viscous flow
 Élisabeth Guazzelli and Jeffrey F. Morris with illustrations by Sylvie Pic Adapted from Chapter 1 of Cambridge Texts in Applied Mathematics 1 The fluid dynamic equations Navier-Stokes equations Dimensionless
Élisabeth Guazzelli and Jeffrey F. Morris with illustrations by Sylvie Pic Adapted from Chapter 1 of Cambridge Texts in Applied Mathematics 1 The fluid dynamic equations Navier-Stokes equations Dimensionless
Rigid Body Kinetics :: Virtual Work
 Rigid Body Kinetics :: Virtual Work Work-energy relation for an infinitesimal displacement: du = dt + dv (du :: total work done by all active forces) For interconnected systems, differential change in
Rigid Body Kinetics :: Virtual Work Work-energy relation for an infinitesimal displacement: du = dt + dv (du :: total work done by all active forces) For interconnected systems, differential change in
EOS 352 Continuum Dynamics Conservation of angular momentum
 EOS 352 Continuum Dynamics Conservation of angular momentum c Christian Schoof. Not to be copied, used, or revised without explicit written permission from the copyright owner The copyright owner explicitly
EOS 352 Continuum Dynamics Conservation of angular momentum c Christian Schoof. Not to be copied, used, or revised without explicit written permission from the copyright owner The copyright owner explicitly
The... of a particle is defined as its change in position in some time interval.
 Distance is the. of a path followed by a particle. Distance is a quantity. The... of a particle is defined as its change in position in some time interval. Displacement is a.. quantity. The... of a particle
Distance is the. of a path followed by a particle. Distance is a quantity. The... of a particle is defined as its change in position in some time interval. Displacement is a.. quantity. The... of a particle
Einstein Toolkit Workshop. Joshua Faber Apr
 Einstein Toolkit Workshop Joshua Faber Apr 05 2012 Outline Space, time, and special relativity The metric tensor and geometry Curvature Geodesics Einstein s equations The Stress-energy tensor 3+1 formalisms
Einstein Toolkit Workshop Joshua Faber Apr 05 2012 Outline Space, time, and special relativity The metric tensor and geometry Curvature Geodesics Einstein s equations The Stress-energy tensor 3+1 formalisms
Rotation. Rotational Variables
 Rotation Rigid Bodies Rotation variables Constant angular acceleration Rotational KE Rotational Inertia Rotational Variables Rotation of a rigid body About a fixed rotation axis. Rigid Body an object that
Rotation Rigid Bodies Rotation variables Constant angular acceleration Rotational KE Rotational Inertia Rotational Variables Rotation of a rigid body About a fixed rotation axis. Rigid Body an object that
Consider a particle in 1D at position x(t), subject to a force F (x), so that mẍ = F (x). Define the kinetic energy to be.
, subject to a force F (x), so that mẍ = F (x). Define the kinetic energy to be.") Chapter 4 Energy and Stability 4.1 Energy in 1D Consider a particle in 1D at position x(t), subject to a force F (x), so that mẍ = F (x). Define the kinetic energy to be T = 1 2 mẋ2 and the potential energy
Chapter 4 Energy and Stability 4.1 Energy in 1D Consider a particle in 1D at position x(t), subject to a force F (x), so that mẍ = F (x). Define the kinetic energy to be T = 1 2 mẋ2 and the potential energy
Chapter 6: Vector Analysis
 Chapter 6: Vector Analysis We use derivatives and various products of vectors in all areas of physics. For example, Newton s 2nd law is F = m d2 r. In electricity dt 2 and magnetism, we need surface and
Chapter 6: Vector Analysis We use derivatives and various products of vectors in all areas of physics. For example, Newton s 2nd law is F = m d2 r. In electricity dt 2 and magnetism, we need surface and
Chapter 10. Rotation of a Rigid Object about a Fixed Axis
 Chapter 10 Rotation of a Rigid Object about a Fixed Axis Angular Position Axis of rotation is the center of the disc Choose a fixed reference line. Point P is at a fixed distance r from the origin. A small
Chapter 10 Rotation of a Rigid Object about a Fixed Axis Angular Position Axis of rotation is the center of the disc Choose a fixed reference line. Point P is at a fixed distance r from the origin. A small
BSL Transport Phenomena 2e Revised: Chapter 2 - Problem 2B.11 Page 1 of 5
 BS Transport Phenomena 2e Revised: Chapter 2 - Problem 2B11 Page 1 of 5 Problem 2B11 The cone-and-plate viscometer (see Fig 2B11 A cone-and-plate viscometer consists of a flat plate and an inverted cone,
BS Transport Phenomena 2e Revised: Chapter 2 - Problem 2B11 Page 1 of 5 Problem 2B11 The cone-and-plate viscometer (see Fig 2B11 A cone-and-plate viscometer consists of a flat plate and an inverted cone,
Fundamentals of Fluid Dynamics: Elementary Viscous Flow
 Fundamentals of Fluid Dynamics: Elementary Viscous Flow Introductory Course on Multiphysics Modelling TOMASZ G. ZIELIŃSKI bluebox.ippt.pan.pl/ tzielins/ Institute of Fundamental Technological Research
Fundamentals of Fluid Dynamics: Elementary Viscous Flow Introductory Course on Multiphysics Modelling TOMASZ G. ZIELIŃSKI bluebox.ippt.pan.pl/ tzielins/ Institute of Fundamental Technological Research
1.1. Rotational Kinematics Description Of Motion Of A Rotating Body
 PHY 19- PHYSICS III 1. Moment Of Inertia 1.1. Rotational Kinematics Description Of Motion Of A Rotating Body 1.1.1. Linear Kinematics Consider the case of linear kinematics; it concerns the description
PHY 19- PHYSICS III 1. Moment Of Inertia 1.1. Rotational Kinematics Description Of Motion Of A Rotating Body 1.1.1. Linear Kinematics Consider the case of linear kinematics; it concerns the description
2.20 Fall 2018 Math Review
 2.20 Fall 2018 Math Review September 10, 2018 These notes are to help you through the math used in this class. This is just a refresher, so if you never learned one of these topics you should look more
2.20 Fall 2018 Math Review September 10, 2018 These notes are to help you through the math used in this class. This is just a refresher, so if you never learned one of these topics you should look more
Aerodynamics. Basic Aerodynamics. Continuity equation (mass conserved) Some thermodynamics. Energy equation (energy conserved)
 Some thermodynamics. Energy equation (energy conserved)") Flow with no friction (inviscid) Aerodynamics Basic Aerodynamics Continuity equation (mass conserved) Flow with friction (viscous) Momentum equation (F = ma) 1. Euler s equation 2. Bernoulli s equation
Flow with no friction (inviscid) Aerodynamics Basic Aerodynamics Continuity equation (mass conserved) Flow with friction (viscous) Momentum equation (F = ma) 1. Euler s equation 2. Bernoulli s equation
Moment of inertia. Contents. 1 Introduction and simple cases. January 15, Introduction. 1.2 Examples
 Moment of inertia January 15, 016 A systematic account is given of the concept and the properties of the moment of inertia. Contents 1 Introduction and simple cases 1 1.1 Introduction.............. 1 1.
Moment of inertia January 15, 016 A systematic account is given of the concept and the properties of the moment of inertia. Contents 1 Introduction and simple cases 1 1.1 Introduction.............. 1 1.
PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION
 PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION I. Moment of Inertia: Since a body has a definite size and shape, an applied nonconcurrent force system may cause the body to both translate and rotate.
PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION I. Moment of Inertia: Since a body has a definite size and shape, an applied nonconcurrent force system may cause the body to both translate and rotate.
The Equations of Motion in a Rotating Coordinate System. Chapter 3
 The Equations of Motion in a Rotating Coordinate System Chapter 3 Since the earth is rotating about its axis and since it is convenient to adopt a frame of reference fixed in the earth, we need to study
The Equations of Motion in a Rotating Coordinate System Chapter 3 Since the earth is rotating about its axis and since it is convenient to adopt a frame of reference fixed in the earth, we need to study
Chapter 22. Dr. Armen Kocharian. Gauss s Law Lecture 4
 Chapter 22 Dr. Armen Kocharian Gauss s Law Lecture 4 Field Due to a Plane of Charge E must be perpendicular to the plane and must have the same magnitude at all points equidistant from the plane Choose
Chapter 22 Dr. Armen Kocharian Gauss s Law Lecture 4 Field Due to a Plane of Charge E must be perpendicular to the plane and must have the same magnitude at all points equidistant from the plane Choose
Kinematics (special case) Dynamics gravity, tension, elastic, normal, friction. Energy: kinetic, potential gravity, spring + work (friction)
 Dynamics gravity, tension, elastic, normal, friction. Energy: kinetic, potential gravity, spring + work (friction)") Kinematics (special case) a = constant 1D motion 2D projectile Uniform circular Dynamics gravity, tension, elastic, normal, friction Motion with a = constant Newton s Laws F = m a F 12 = F 21 Time & Position
Kinematics (special case) a = constant 1D motion 2D projectile Uniform circular Dynamics gravity, tension, elastic, normal, friction Motion with a = constant Newton s Laws F = m a F 12 = F 21 Time & Position
14. Rotational Kinematics and Moment of Inertia
 14. Rotational Kinematics and Moment of nertia A) Overview n this unit we will introduce rotational motion. n particular, we will introduce the angular kinematic variables that are used to describe the
14. Rotational Kinematics and Moment of nertia A) Overview n this unit we will introduce rotational motion. n particular, we will introduce the angular kinematic variables that are used to describe the
Moments of Inertia (7 pages; 23/3/18)
") Moments of Inertia (7 pages; 3/3/8) () Suppose that an object rotates about a fixed axis AB with angular velocity θ. Considering the object to be made up of particles, suppose that particle i (with mass
Moments of Inertia (7 pages; 3/3/8) () Suppose that an object rotates about a fixed axis AB with angular velocity θ. Considering the object to be made up of particles, suppose that particle i (with mass
5.8 Laminar Boundary Layers
 2.2 Marine Hydrodynamics, Fall 218 ecture 19 Copyright c 218 MIT - Department of Mechanical Engineering, All rights reserved. 2.2 - Marine Hydrodynamics ecture 19 5.8 aminar Boundary ayers δ y U potential
2.2 Marine Hydrodynamics, Fall 218 ecture 19 Copyright c 218 MIT - Department of Mechanical Engineering, All rights reserved. 2.2 - Marine Hydrodynamics ecture 19 5.8 aminar Boundary ayers δ y U potential
18.02 Multivariable Calculus Fall 2007
 MIT OpenourseWare http://ocw.mit.edu 18.02 Multivariable alculus Fall 2007 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 18.02 Lecture 21. Test for
MIT OpenourseWare http://ocw.mit.edu 18.02 Multivariable alculus Fall 2007 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 18.02 Lecture 21. Test for
MEI STRUCTURED MATHEMATICS 4763
 OXFORD CAMBRIDGE AND RSA EXAMINATIONS Advanced Subsidiary General Certificate of Education Advanced General Certificate of Education MEI STRUCTURED MATHEMATICS 76 Mechanics Monday MAY 006 Morning hour
OXFORD CAMBRIDGE AND RSA EXAMINATIONS Advanced Subsidiary General Certificate of Education Advanced General Certificate of Education MEI STRUCTURED MATHEMATICS 76 Mechanics Monday MAY 006 Morning hour
Lecture: Wave-induced Momentum Fluxes: Radiation Stresses
 Chapter 4 Lecture: Wave-induced Momentum Fluxes: Radiation Stresses Here we derive the wave-induced depth-integrated momentum fluxes, otherwise known as the radiation stress tensor S. These are the 2nd-order
Chapter 4 Lecture: Wave-induced Momentum Fluxes: Radiation Stresses Here we derive the wave-induced depth-integrated momentum fluxes, otherwise known as the radiation stress tensor S. These are the 2nd-order
SEAKEEPING AND MANEUVERING Prof. Dr. S. Beji 2
 SEAKEEPING AND MANEUVERING Prof. Dr. S. Beji 2 Ship Motions Ship motions in a seaway are very complicated but can be broken down into 6-degrees of freedom motions relative to 3 mutually perpendicular axes
SEAKEEPING AND MANEUVERING Prof. Dr. S. Beji 2 Ship Motions Ship motions in a seaway are very complicated but can be broken down into 6-degrees of freedom motions relative to 3 mutually perpendicular axes
Review of Engineering Dynamics
 Review of Engineering Dynamics Part 1: Kinematics of Particles and Rigid Bodies by James Doane, PhD, PE Contents 1.0 Course Overview... 4.0 Basic Introductory Concepts... 4.1 Introduction... 4.1.1 Vectors
Review of Engineering Dynamics Part 1: Kinematics of Particles and Rigid Bodies by James Doane, PhD, PE Contents 1.0 Course Overview... 4.0 Basic Introductory Concepts... 4.1 Introduction... 4.1.1 Vectors
In this section, mathematical description of the motion of fluid elements moving in a flow field is
 Jun. 05, 015 Chapter 6. Differential Analysis of Fluid Flow 6.1 Fluid Element Kinematics In this section, mathematical description of the motion of fluid elements moving in a flow field is given. A small
Jun. 05, 015 Chapter 6. Differential Analysis of Fluid Flow 6.1 Fluid Element Kinematics In this section, mathematical description of the motion of fluid elements moving in a flow field is given. A small
Constrained motion and generalized coordinates
 Constrained motion and generalized coordinates based on FW-13 Often, the motion of particles is restricted by constraints, and we want to: work only with independent degrees of freedom (coordinates) k
Constrained motion and generalized coordinates based on FW-13 Often, the motion of particles is restricted by constraints, and we want to: work only with independent degrees of freedom (coordinates) k
(You may need to make a sin / cos-type trigonometric substitution.) Solution.
 Solution.") MTHE 7 Problem Set Solutions. As a reminder, a torus with radii a and b is the surface of revolution of the circle (x b) + z = a in the xz-plane about the z-axis (a and b are positive real numbers, with
MTHE 7 Problem Set Solutions. As a reminder, a torus with radii a and b is the surface of revolution of the circle (x b) + z = a in the xz-plane about the z-axis (a and b are positive real numbers, with
Math Review Night: Work and the Dot Product
 Math Review Night: Work and the Dot Product Dot Product A scalar quantity Magnitude: A B = A B cosθ The dot product can be positive, zero, or negative Two types of projections: the dot product is the parallel
Math Review Night: Work and the Dot Product Dot Product A scalar quantity Magnitude: A B = A B cosθ The dot product can be positive, zero, or negative Two types of projections: the dot product is the parallel
One side of each sheet is blank and may be used as scratch paper.
 Math 244 Spring 2017 (Practice) Final 5/11/2017 Time Limit: 2 hours Name: No calculators or notes are allowed. One side of each sheet is blank and may be used as scratch paper. heck your answers whenever
Math 244 Spring 2017 (Practice) Final 5/11/2017 Time Limit: 2 hours Name: No calculators or notes are allowed. One side of each sheet is blank and may be used as scratch paper. heck your answers whenever
FLUID MECHANICS. Based on CHEM_ENG 421 at Northwestern University
 FLUID MECHANICS Based on CHEM_ENG 421 at Northwestern University NEWTON S LAWS 1 TABLE OF CONTENTS 1 Newton s Laws... 3 1.1 Inertial Frames... 3 1.2 Newton s Laws... 3 1.3 Galilean Invariance... 3 2 Mathematical
FLUID MECHANICS Based on CHEM_ENG 421 at Northwestern University NEWTON S LAWS 1 TABLE OF CONTENTS 1 Newton s Laws... 3 1.1 Inertial Frames... 3 1.2 Newton s Laws... 3 1.3 Galilean Invariance... 3 2 Mathematical
V (r,t) = i ˆ u( x, y,z,t) + ˆ j v( x, y,z,t) + k ˆ w( x, y, z,t)
 = i ˆ u( x, y,z,t) + ˆ j v( x, y,z,t) + k ˆ w( x, y, z,t)") IV. DIFFERENTIAL RELATIONS FOR A FLUID PARTICLE This chapter presents the development and application of the basic differential equations of fluid motion. Simplifications in the general equations and common
IV. DIFFERENTIAL RELATIONS FOR A FLUID PARTICLE This chapter presents the development and application of the basic differential equations of fluid motion. Simplifications in the general equations and common
PC 1141 : AY 2012 /13
 NUS Physics Society Past Year Paper Solutions PC 1141 : AY 2012 /13 Compiled by: NUS Physics Society Past Year Solution Team Yeo Zhen Yuan Ryan Goh Published on: November 17, 2015 1. An egg of mass 0.050
NUS Physics Society Past Year Paper Solutions PC 1141 : AY 2012 /13 Compiled by: NUS Physics Society Past Year Solution Team Yeo Zhen Yuan Ryan Goh Published on: November 17, 2015 1. An egg of mass 0.050
Offshore Hydromechanics Module 1
 Offshore Hydromechanics Module 1 Dr. ir. Pepijn de Jong 4. Potential Flows part 2 Introduction Topics of Module 1 Problems of interest Chapter 1 Hydrostatics Chapter 2 Floating stability Chapter 2 Constant
Offshore Hydromechanics Module 1 Dr. ir. Pepijn de Jong 4. Potential Flows part 2 Introduction Topics of Module 1 Problems of interest Chapter 1 Hydrostatics Chapter 2 Floating stability Chapter 2 Constant
Lecture 9: Eigenvalues and Eigenvectors in Classical Mechanics (See Section 3.12 in Boas)
") Lecture 9: Eigenvalues and Eigenvectors in Classical Mechanics (See Section 3 in Boas) As suggested in Lecture 8 the formalism of eigenvalues/eigenvectors has many applications in physics, especially in
Lecture 9: Eigenvalues and Eigenvectors in Classical Mechanics (See Section 3 in Boas) As suggested in Lecture 8 the formalism of eigenvalues/eigenvectors has many applications in physics, especially in
Modern Physics. Unit 6: Hydrogen Atom - Radiation Lecture 6.3: Vector Model of Angular Momentum
 Modern Physics Unit 6: Hydrogen Atom - Radiation ecture 6.3: Vector Model of Angular Momentum Ron Reifenberger Professor of Physics Purdue University 1 Summary of Important Points from ast ecture The magnitude
Modern Physics Unit 6: Hydrogen Atom - Radiation ecture 6.3: Vector Model of Angular Momentum Ron Reifenberger Professor of Physics Purdue University 1 Summary of Important Points from ast ecture The magnitude
Hydrodynamic Forces on Floating Bodies
 Hydrodynamic Forces on Floating Bodies 13.42 Lecture Notes; c A.H. Techet 1. Forces on Large Structures For discussion in this section we will be considering bodies that are quite large compared to the
Hydrodynamic Forces on Floating Bodies 13.42 Lecture Notes; c A.H. Techet 1. Forces on Large Structures For discussion in this section we will be considering bodies that are quite large compared to the
18.02 Multivariable Calculus Fall 2007
 MIT OpenourseWare http://ocw.mit.edu 18.02 Multivariable alculus Fall 2007 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 18.02 Lecture 30. Tue, Nov
MIT OpenourseWare http://ocw.mit.edu 18.02 Multivariable alculus Fall 2007 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 18.02 Lecture 30. Tue, Nov
Chapter 2: Fluid Dynamics Review
 7 Chapter 2: Fluid Dynamics Review This chapter serves as a short review of basic fluid mechanics. We derive the relevant transport equations (or conservation equations), state Newton s viscosity law leading
7 Chapter 2: Fluid Dynamics Review This chapter serves as a short review of basic fluid mechanics. We derive the relevant transport equations (or conservation equations), state Newton s viscosity law leading
Lecture notes on fluid mechanics. Greifswald University 2007
 Lecture notes on fluid mechanics Greifswald University 2007 Per Helander and Thomas Klinger Max-Planck-Institut für Plasmaphysik per.helander@ipp.mpg.de thomas.klinger@ipp.mpg.de 1 1 The equations of fluid
Lecture notes on fluid mechanics Greifswald University 2007 Per Helander and Thomas Klinger Max-Planck-Institut für Plasmaphysik per.helander@ipp.mpg.de thomas.klinger@ipp.mpg.de 1 1 The equations of fluid
Solutions: Homework 5
 Ex. 5.1: Capacitor Solutions: Homework 5 (a) Consider a parallel plate capacitor with large circular plates, radius a, a distance d apart, with a d. Choose cylindrical coordinates (r,φ,z) and let the z
Ex. 5.1: Capacitor Solutions: Homework 5 (a) Consider a parallel plate capacitor with large circular plates, radius a, a distance d apart, with a d. Choose cylindrical coordinates (r,φ,z) and let the z
Navier-Stokes Equation: Principle of Conservation of Momentum
 Navier-tokes Equation: Principle of Conservation of Momentum R. hankar ubramanian Department of Chemical and Biomolecular Engineering Clarkson University Newton formulated the principle of conservation
Navier-tokes Equation: Principle of Conservation of Momentum R. hankar ubramanian Department of Chemical and Biomolecular Engineering Clarkson University Newton formulated the principle of conservation
2.20 Marine Hydrodynamics Lecture 3
 2.20 Marine Hyroynamics, Fall 2018 Lecture 3 Copyright c 2018 MIT - Department of Mechanical Engineering, All rights reserve. 1.7 Stress Tensor 2.20 Marine Hyroynamics Lecture 3 1.7.1 Stress Tensor τ ij
2.20 Marine Hyroynamics, Fall 2018 Lecture 3 Copyright c 2018 MIT - Department of Mechanical Engineering, All rights reserve. 1.7 Stress Tensor 2.20 Marine Hyroynamics Lecture 3 1.7.1 Stress Tensor τ ij
General Physics I. Lecture 10: Rolling Motion and Angular Momentum.
 General Physics I Lecture 10: Rolling Motion and Angular Momentum Prof. WAN, Xin (万歆) 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Rolling motion of a rigid object: center-of-mass motion
General Physics I Lecture 10: Rolling Motion and Angular Momentum Prof. WAN, Xin (万歆) 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Rolling motion of a rigid object: center-of-mass motion
Laplace equation in polar coordinates
 Laplace equation in polar coordinates The Laplace equation is given by 2 F 2 + 2 F 2 = 0 We have x = r cos θ, y = r sin θ, and also r 2 = x 2 + y 2, tan θ = y/x We have for the partials with respect to
Laplace equation in polar coordinates The Laplace equation is given by 2 F 2 + 2 F 2 = 0 We have x = r cos θ, y = r sin θ, and also r 2 = x 2 + y 2, tan θ = y/x We have for the partials with respect to
{ } is an asymptotic sequence.
 AMS B Perturbation Methods Lecture 3 Copyright by Hongyun Wang, UCSC Recap Iterative method for finding asymptotic series requirement on the iteration formula to make it work Singular perturbation use
AMS B Perturbation Methods Lecture 3 Copyright by Hongyun Wang, UCSC Recap Iterative method for finding asymptotic series requirement on the iteration formula to make it work Singular perturbation use
Rotational Kinetic Energy
 Lecture 17, Chapter 10: Rotational Energy and Angular Momentum 1 Rotational Kinetic Energy Consider a rigid body rotating with an angular velocity ω about an axis. Clearly every point in the rigid body
Lecture 17, Chapter 10: Rotational Energy and Angular Momentum 1 Rotational Kinetic Energy Consider a rigid body rotating with an angular velocity ω about an axis. Clearly every point in the rigid body
Chapter 3: Newtonian Fluids
 Chapter 3: Newtonian Fluids CM4650 Michigan Tech Navier-Stokes Equation v vv p t 2 v g 1 Chapter 3: Newtonian Fluid TWO GOALS Derive governing equations (mass and momentum balances Solve governing equations
Chapter 3: Newtonian Fluids CM4650 Michigan Tech Navier-Stokes Equation v vv p t 2 v g 1 Chapter 3: Newtonian Fluid TWO GOALS Derive governing equations (mass and momentum balances Solve governing equations
Solutions Ph 236b Week 1
 Solutions Ph 236b Week 1 Page 1 of 7 Solutions Ph 236b Week 1 Kevin Barkett and Mark Scheel January 19, 216 Contents Problem 1................................... 2 Part (a...................................
Solutions Ph 236b Week 1 Page 1 of 7 Solutions Ph 236b Week 1 Kevin Barkett and Mark Scheel January 19, 216 Contents Problem 1................................... 2 Part (a...................................