14. Rotational Kinematics and Moment of Inertia
|
|
|
- Briana Webb
- 5 years ago
- Views:
Transcription


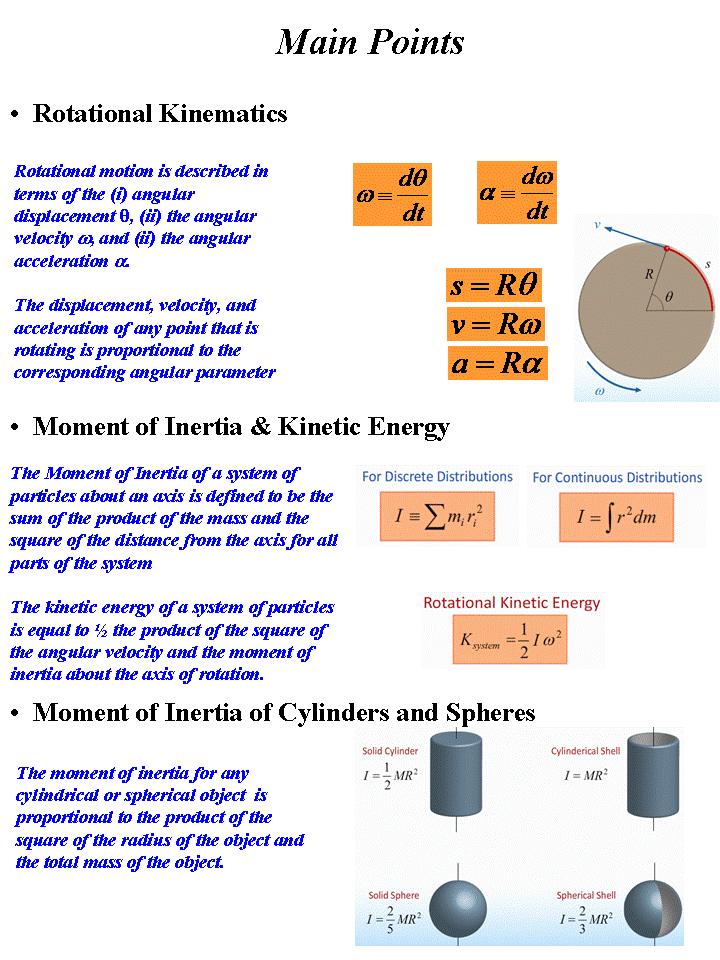
1 14. Rotational Kinematics and Moment of nertia A) Overview n this unit we will introduce rotational motion. n particular, we will introduce the angular kinematic variables that are used to describe the motion and will relate them to our usual one dimensional kinematic variables. We will also define the moment of inertia, the parameter in rotational motion that is analogous to the mass in translational motion. We will evaluate the moment of inertia for a collection of discrete particles as well as for symmetric solid objects. B) Rotational Kinematics Until now our studies of dynamics have been restricted to linear motion of objects described in a Cartesian coordinate system (x, y, and z). n our recent discussions of systems of particles, though, we have discovered that the motion can be described as having two components: (1) the motion of the center of mass and () the motion relative to the center of mass. As an illustration of the motion relative to the center of mass, we will look at the rotation of an object about an axis through the center of mass. Our first step is to develop a coordinate system in which these rotations can be described naturally. Figure 14.1 shows a disk rotating about an axis though its center. The orientation of the disk at any time can be described by a single parameter: the angle θ through which the disk has rotated relative to its initial orientation. We call this angle the angular displacement. The time rate of change of the angular displacement is called the angular velocity ω, and the time rate of change of the angular velocity is called the angular acceleration α. dθ ω dt dω α dt These equations look strikingly similar to those we have used to describe one dimensional kinematics. dx dv v a Figure 14.1 The rotation of a disk about an axis through its center is described by an angular displacement θ. dt dt The reason for this similarity is simply that this rotational motion can be described by a single angular displacement, θ, just as linear motion can be described by a single spatial displacement, x. f we now consider the special case of a constant angular acceleration α, we can derive the equations for ω and θ for this motion by integrating the defining equations. The resulting equations for ω and θ are absolutely identical in form to those describing
 Relating Linear and Rotational Parameters We can now make another useful connection between rotation and one dimensional kinematics by obtaining the")


2 one dimensional motion at constant acceleration with the substitutions α for a, ω for v, and θ for x. θ θ t 1 t o + ωo + α ω ω o + αt ω ω α ( θ o θ o C) Relating Linear and Rotational Parameters We can now make another useful connection between rotation and one dimensional kinematics by obtaining the relationships between the angular and linear kinematic parameters used to describe the motion of a point that is a fixed distance R from the rotational axis. n the case of one dimensional motion along the x axis we needed to specify which direction we choose to be positive so that the signs of displacement and velocity and acceleration have meaning. n exactly the same way, we need to specify which direction of rotation we choose to be positive so that the signs of angular displacement and angular velocity and angular acceleration have meaning. Although we are always free to choose either direction of rotation to be positive, it is customary to pick the counterclockwise as the positive direction. With this choice, the angular displacement θ agrees with that usually used in trigonometry. Since all points on the disk are rotating together, we can determine the linear displacement, speed and acceleration of any point on the disk in terms of the corresponding angular parameters. Figure 14. shows a disk turned through an angular displacement θ. We can see that a point located a distance R from the rotation axis moves through a distance s along a circular path of radius R. This distance s is determined from geometry to be just equal to the product of the radius and the angular displacement, measured in radians. s Rθ Taking the derivative of this linear distance with respect to time, we find a simple relationship between the speed of the point and the angular velocity of the disk. ds dt dθ R v Rω dt ) Figure 14. A disk rotates with angular velocity ω through an angular displacement θ.
3 Taking the derivative of this linear speed with respect to time, we find a simple relationship between the tangential acceleration of the point along its circular path and the angular acceleration of the disk. dv dω R a Rα dt dt D) Kinetic Energy in Rotations We will now expand our discussion of rotations by considering the motion of a rigid object made up of a set of point particles connected by massless rods as shown in Figure 14.. This object rotates about the fixed axis with a constant angular velocity ω. We will assume we know the masses of each particle (m i ) and also the distances of each particle from the axis of rotation (r i ). The total kinetic energy of this object is defined to be the sum of the kinetic energies of each of its parts. We found in the last section that the speed of a rotating object relative to the axis of rotation is just the product of its angular velocity and its distance from the axis. Therefore, we can rewrite the expression for the total kinetic energy of the object in terms of its angular velocity. 1 K m ( rω) system i i Figure 14. A rigid object consisting of five point particles connected by massless rods rotates with angular velocity ω. Since this angular velocity is a constant, we can take it, and the common factor of ½, outside the sum. 1 K ( ) ω system miri We will define the remaining sum, namely, the sum of the product of each mass with the square of its distance from the axis, to be the moment of inertia of the object about this axis and will denote it with the symbol. m i r i Note that the resulting expression for the kinetic energy of this object has the same form as the kinetic energy of a point particle. 1 K system ω We have just replaced the velocity by the angular velocity, and mass by the moment of inertia.
4 n other words, in the same way that the mass of an object tells us how its kinetic energy is related to the square of its velocity, the moment of inertia of a rotating object tells us how its kinetic energy is related to the square of its angular velocity. n a sense, the moment of inertia plays the same role in rotational motion that the mass plays in the simpler motions we have studied up to this point. As we learn more about rotations, we will see this conceptual connection between mass and the moment of inertia appear again and again. E) Moment of nertia We will spend the remainder of this unit exploring the properties of the moment of inertia in more detail. The most obvious difference between mass and the moment of inertia is that the moment of inertial depends not just on the total mass, but also on exactly where that mass is located. ndeed, the moment of inertia even depends on our choice of the rotation axis, since we are measuring all distances relative to this axis. We will now do a simple example to illustrate these points. Figure 14.4 shows an object made up of four point particles of equal mass M arranged in a square of side L centered on the origin. The x and y axes are as shown and the z axis points out of the page. We will first calculate the moment of inertia of this object if it is rotated around the x axis. Since the distance of each mass from the x axis is just equal to L, the sum we need to make to determine the moment of inertia is simple. m r 4ML x i i Clearly, if we were to calculate the moment of inertia for rotations around the y axis, we would find it to be identical to the moment of inertia for rotations about the x axis What about rotations around the z axis? The distance of each particle from the z axis is clearly larger than L. ndeed, using the Pythagorean theorem, we see that the square of the distance to each mass is twice as big as before. m r 8ML z i i Figure 14.4 A rigid object consists of four point particles, each of mass M, located at the corners of a square of side L. Therefore, the moment of inertia for rotations about the z axis is twice as big as the moment of inertia for rotations about the x or y axes. We ve seen from this example exactly how to calculate the moment of inertia of an object made up of discrete point particles about any axis. We ve learned that the moment of inertia does depend on the choice of the rotation axis. n the next section, we will generalize this calculation to the case of a continuous solid object, rather than a small collection of points.
5 F) Moment of nertia of a Solid Object Figure 14.5 shows a thin rod of mass M and length L centered along the x-axis. How do we go about calculating its moment of inertia for rotations about the z axis? Once again, as we have done so often, we will need to replace the discrete sum we used in the last section with an appropriate integral. We will call the mass per unit length of the rod λ. Each infinitesimal piece of the rod has a length dx and a mass equal to the product of this length and the mass per unit length. dm λdx The contribution to the moment of inertia from such an infinitesimal piece of the rod located a distance x from the origin is just equal to the product of its mass and the square of its distance from the axis.. d z dmx To find the total moment of inertia, we integrate over the length of the rod. z + L / L / x λ dx λ + L / x L / dx The mass density can be taken outside the integral and we are left with the integral of x which is just x /. Evaluating this expression between the limits, we obtain: L / 1 λ x 1 z λ L L / 1 We can replace the mass density by the total mass divided by the length of the rod to obtain an expression that is proportional to the product of the total mass and the square of the length of the rod, as expected. 1 ML z 1 We know the moment of inertia depends on the choice of the axis. Suppose we want to calculate the moment of inertia about an axis that is parallel to the z axis, but passes through the end of the rod rather than its middle. How does the calculation change? To determine the moment of inertia we just do the integral again, this time shifting the location of the rod to the right so that its left end is at the origin. L 1 z λ x dx λl 0 Figure 14.5 A thin rod of mass M and length L is aligned with the x-axis. 1 ML Evaluating the integral, we see that the moment of inertia about the end of the rod is four times as big as the moment of inertia about its center. This result is reasonable, since more of the mass is further from the axis when it is located at the end of the rod rather than at its center.

 rather than Cartesian coordinates. Figure 14.")


6 F) Moment of nertia of a Solid Cylinder We will now do one more example that will illustrate some general features of moments of inertia of solid objects. Figure 14.6 shows a solid cylinder or mass M and radius R. The axis of the cylinder coincides with the z axis and its end surfaces are located at z 0 and z L. Figure 14.6 A solid cylinder of radius R, length L and mass M. Since this object has cylindrical symmetry, our integral will be simplified if we use cylindrical coordinates (namely, r, φ and z) rather than Cartesian coordinates. Figure 14.7 shows the volume element illustrated as the product of dr, dz and rdφ. To integrate over the mass of the cylinder, we use the mass element dm which is just equal to the product of this volume element and ρ, the mass per unit volume of the cylinder. dm ρrdrdzdφ To evaluate the moment of inertia about the axis of symmetry, the z axis, we just need to integrate r dm over the entire cylinder. z r dm ρ r drdzdφ ρ dz Figure 14.7 A volume element in cylindrical coordinates for the cylinder in Fig 14.6 L 0 π 0 R dφ r The z and φ integrals are trivial, just being equal to πl. We are left then with just the integral of r. Evaluating this integral and simplifying, we see that the moment of inertia of the cylinder about its axis is just equal to ½ MR. 4 M R 1 z πl MR πr L 4 Note that this result does not depend explicitly on the length of the cylinder, only on its mass and radius. For example, if we were to cut the cylinder in half through a plane perpendicular to the z axis, we would have two cylinders, each with half the mass of the 0 dr
7 original cylinder. Therefore the moment of inertia of each new cylinder is just half of the moment of inertia of the original cylinder. Total i i Consequently, we see that if a system is made of two or more parts, and we know the moment of inertia of each part about some axis, then the total moment of inertia about that axis is just the sum of the moments of inertia of the parts. This result may seem somewhat trivial, but it will prove useful later. G) Moment of nertia for Solid Objects We have just determined that the moment of inertia of a solid cylinder about its axis is proportional to the product of its mass and the square of its radius. We can determine the moment of inertia of any other object with cylindrical or spherical symmetry in exactly the same way. We will always find this same result, that the moment of inertia will be proportional to the product of its mass and the square of its radius. Total MR The constant of proportionality will be different, of course, for each different shape. The larger this constant, the more mass is located far from the axis. For example, it is easy to see that for a cylindrical shell, this constant of proportionality is just equal to one, since all of the mass is located at the radius of the shell. Consider a solid sphere and a solid cylinder. We expect the constant of proportionality for the sphere to be smaller than that for the cylinder since more of its mass is concentrated near the axis. When we do the calculation, we see that this constant for the sphere is /5 which is indeed smaller than the factor of ½ we have calculated for the solid cylinder. Similarly, we expect that the constant for a spherical shell is smaller than that for a cylindrical shell. 1 solidcylin der MR solidcsphe re MR 5 cylindrica lshell MR sphericals hell MR
8
Handout 6: Rotational motion and moment of inertia. Angular velocity and angular acceleration
 1 Handout 6: Rotational motion and moment of inertia Angular velocity and angular acceleration In Figure 1, a particle b is rotating about an axis along a circular path with radius r. The radius sweeps
1 Handout 6: Rotational motion and moment of inertia Angular velocity and angular acceleration In Figure 1, a particle b is rotating about an axis along a circular path with radius r. The radius sweeps
Two-Dimensional Rotational Kinematics
 Two-Dimensional Rotational Kinematics Rigid Bodies A rigid body is an extended object in which the distance between any two points in the object is constant in time. Springs or human bodies are non-rigid
Two-Dimensional Rotational Kinematics Rigid Bodies A rigid body is an extended object in which the distance between any two points in the object is constant in time. Springs or human bodies are non-rigid
Chapter 9 Rotation of Rigid Bodies
 Chapter 9 Rotation of Rigid Bodies 1 Angular Velocity and Acceleration θ = s r (angular displacement) The natural units of θ is radians. Angular Velocity 1 rad = 360o 2π = 57.3o Usually we pick the z-axis
Chapter 9 Rotation of Rigid Bodies 1 Angular Velocity and Acceleration θ = s r (angular displacement) The natural units of θ is radians. Angular Velocity 1 rad = 360o 2π = 57.3o Usually we pick the z-axis
PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION
 PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION I. Moment of Inertia: Since a body has a definite size and shape, an applied nonconcurrent force system may cause the body to both translate and rotate.
PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION I. Moment of Inertia: Since a body has a definite size and shape, an applied nonconcurrent force system may cause the body to both translate and rotate.
Physics 121. March 18, Physics 121. March 18, Course Announcements. Course Information. Topics to be discussed today:
 Physics 121. March 18, 2008. Physics 121. March 18, 2008. Course Information Topics to be discussed today: Variables used to describe rotational motion The equations of motion for rotational motion Course
Physics 121. March 18, 2008. Physics 121. March 18, 2008. Course Information Topics to be discussed today: Variables used to describe rotational motion The equations of motion for rotational motion Course
Chapter 10. Rotation of a Rigid Object about a Fixed Axis
 Chapter 10 Rotation of a Rigid Object about a Fixed Axis Angular Position Axis of rotation is the center of the disc Choose a fixed reference line. Point P is at a fixed distance r from the origin. A small
Chapter 10 Rotation of a Rigid Object about a Fixed Axis Angular Position Axis of rotation is the center of the disc Choose a fixed reference line. Point P is at a fixed distance r from the origin. A small
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2)
") PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
1.1. Rotational Kinematics Description Of Motion Of A Rotating Body
 PHY 19- PHYSICS III 1. Moment Of Inertia 1.1. Rotational Kinematics Description Of Motion Of A Rotating Body 1.1.1. Linear Kinematics Consider the case of linear kinematics; it concerns the description
PHY 19- PHYSICS III 1. Moment Of Inertia 1.1. Rotational Kinematics Description Of Motion Of A Rotating Body 1.1.1. Linear Kinematics Consider the case of linear kinematics; it concerns the description
CIRCULAR MOTION AND ROTATION
 1. UNIFORM CIRCULAR MOTION So far we have learned a great deal about linear motion. This section addresses rotational motion. The simplest kind of rotational motion is an object moving in a perfect circle
1. UNIFORM CIRCULAR MOTION So far we have learned a great deal about linear motion. This section addresses rotational motion. The simplest kind of rotational motion is an object moving in a perfect circle
Rotational Motion and Torque
 Rotational Motion and Torque Introduction to Angular Quantities Sections 8- to 8-2 Introduction Rotational motion deals with spinning objects, or objects rotating around some point. Rotational motion is
Rotational Motion and Torque Introduction to Angular Quantities Sections 8- to 8-2 Introduction Rotational motion deals with spinning objects, or objects rotating around some point. Rotational motion is
Relating Translational and Rotational Variables
 Relating Translational and Rotational Variables Rotational position and distance moved s = θ r (only radian units) Rotational and translational speed d s v = dt v = ω r = ds dt = d θ dt r Relating period
Relating Translational and Rotational Variables Rotational position and distance moved s = θ r (only radian units) Rotational and translational speed d s v = dt v = ω r = ds dt = d θ dt r Relating period
Angular Motion, General Notes
 Angular Motion, General Notes! When a rigid object rotates about a fixed axis in a given time interval, every portion on the object rotates through the same angle in a given time interval and has the same
Angular Motion, General Notes! When a rigid object rotates about a fixed axis in a given time interval, every portion on the object rotates through the same angle in a given time interval and has the same
Lecture 10 - Moment of Inertia
 Lecture 10 - oment of Inertia A Puzzle... Question For any object, there are typically many ways to calculate the moment of inertia I = r 2 dm, usually by doing the integration by considering different
Lecture 10 - oment of Inertia A Puzzle... Question For any object, there are typically many ways to calculate the moment of inertia I = r 2 dm, usually by doing the integration by considering different
Chapter 8 Lecture Notes
 Chapter 8 Lecture Notes Physics 2414 - Strauss Formulas: v = l / t = r θ / t = rω a T = v / t = r ω / t =rα a C = v 2 /r = ω 2 r ω = ω 0 + αt θ = ω 0 t +(1/2)αt 2 θ = (1/2)(ω 0 +ω)t ω 2 = ω 0 2 +2αθ τ
Chapter 8 Lecture Notes Physics 2414 - Strauss Formulas: v = l / t = r θ / t = rω a T = v / t = r ω / t =rα a C = v 2 /r = ω 2 r ω = ω 0 + αt θ = ω 0 t +(1/2)αt 2 θ = (1/2)(ω 0 +ω)t ω 2 = ω 0 2 +2αθ τ
Rotation. Rotational Variables
 Rotation Rigid Bodies Rotation variables Constant angular acceleration Rotational KE Rotational Inertia Rotational Variables Rotation of a rigid body About a fixed rotation axis. Rigid Body an object that
Rotation Rigid Bodies Rotation variables Constant angular acceleration Rotational KE Rotational Inertia Rotational Variables Rotation of a rigid body About a fixed rotation axis. Rigid Body an object that
Moment of inertia. Contents. 1 Introduction and simple cases. January 15, Introduction. 1.2 Examples
 Moment of inertia January 15, 016 A systematic account is given of the concept and the properties of the moment of inertia. Contents 1 Introduction and simple cases 1 1.1 Introduction.............. 1 1.
Moment of inertia January 15, 016 A systematic account is given of the concept and the properties of the moment of inertia. Contents 1 Introduction and simple cases 1 1.1 Introduction.............. 1 1.
Moments of Inertia (7 pages; 23/3/18)
") Moments of Inertia (7 pages; 3/3/8) () Suppose that an object rotates about a fixed axis AB with angular velocity θ. Considering the object to be made up of particles, suppose that particle i (with mass
Moments of Inertia (7 pages; 3/3/8) () Suppose that an object rotates about a fixed axis AB with angular velocity θ. Considering the object to be made up of particles, suppose that particle i (with mass
Rotation. EMU Physics Department. Ali ÖVGÜN.
 Rotation Ali ÖVGÜN EMU Physics Department www.aovgun.com Rotational Motion Angular Position and Radians Angular Velocity Angular Acceleration Rigid Object under Constant Angular Acceleration Angular and
Rotation Ali ÖVGÜN EMU Physics Department www.aovgun.com Rotational Motion Angular Position and Radians Angular Velocity Angular Acceleration Rigid Object under Constant Angular Acceleration Angular and
Motion Of An Extended Object. Physics 201, Lecture 17. Translational Motion And Rotational Motion. Motion of Rigid Object: Translation + Rotation
 Physics 01, Lecture 17 Today s Topics q Rotation of Rigid Object About A Fixed Axis (Chap. 10.1-10.4) n Motion of Extend Object n Rotational Kinematics: n Angular Velocity n Angular Acceleration q Kinetic
Physics 01, Lecture 17 Today s Topics q Rotation of Rigid Object About A Fixed Axis (Chap. 10.1-10.4) n Motion of Extend Object n Rotational Kinematics: n Angular Velocity n Angular Acceleration q Kinetic
Physics 201. Professor P. Q. Hung. 311B, Physics Building. Physics 201 p. 1/1
 Physics 201 p. 1/1 Physics 201 Professor P. Q. Hung 311B, Physics Building Physics 201 p. 2/1 Rotational Kinematics and Energy Rotational Kinetic Energy, Moment of Inertia All elements inside the rigid
Physics 201 p. 1/1 Physics 201 Professor P. Q. Hung 311B, Physics Building Physics 201 p. 2/1 Rotational Kinematics and Energy Rotational Kinetic Energy, Moment of Inertia All elements inside the rigid
Angular Displacement. θ i. 1rev = 360 = 2π rads. = "angular displacement" Δθ = θ f. π = circumference. diameter
 Rotational Motion Angular Displacement π = circumference diameter π = circumference 2 radius circumference = 2πr Arc length s = rθ, (where θ in radians) θ 1rev = 360 = 2π rads Δθ = θ f θ i = "angular displacement"
Rotational Motion Angular Displacement π = circumference diameter π = circumference 2 radius circumference = 2πr Arc length s = rθ, (where θ in radians) θ 1rev = 360 = 2π rads Δθ = θ f θ i = "angular displacement"
Rotation Moment of Inertia and Applications
 Rotation Moment of Inertia and Applications Lana Sheridan De Anza College Nov 20, 2016 Last time net torque Newton s second law for rotation moments of inertia calculating moments of inertia Overview calculating
Rotation Moment of Inertia and Applications Lana Sheridan De Anza College Nov 20, 2016 Last time net torque Newton s second law for rotation moments of inertia calculating moments of inertia Overview calculating
PH 221-3A Fall 2009 ROTATION. Lectures Chapter 10 (Halliday/Resnick/Walker, Fundamentals of Physics 8 th edition)
") PH 1-3A Fall 009 ROTATION Lectures 16-17 Chapter 10 (Halliday/Resnick/Walker, Fundamentals of Physics 8 th edition) 1 Chapter 10 Rotation In this chapter we will study the rotational motion of rigid bodies
PH 1-3A Fall 009 ROTATION Lectures 16-17 Chapter 10 (Halliday/Resnick/Walker, Fundamentals of Physics 8 th edition) 1 Chapter 10 Rotation In this chapter we will study the rotational motion of rigid bodies
Chapter 15 Appendix Moment of Inertia of a Spherical Shell
 Chapter 1 Appendix Moment of nertia of a Spherical Shell t is common to regard the rotation of a rigid object with spherical symmetry; we live on one such object (not entirely uniform and not entirely
Chapter 1 Appendix Moment of nertia of a Spherical Shell t is common to regard the rotation of a rigid object with spherical symmetry; we live on one such object (not entirely uniform and not entirely
Rotational Kinematics and Dynamics. UCVTS AIT Physics
 Rotational Kinematics and Dynamics UCVTS AIT Physics Angular Position Axis of rotation is the center of the disc Choose a fixed reference line Point P is at a fixed distance r from the origin Angular Position,
Rotational Kinematics and Dynamics UCVTS AIT Physics Angular Position Axis of rotation is the center of the disc Choose a fixed reference line Point P is at a fixed distance r from the origin Angular Position,
Lecture II: Rigid-Body Physics
 Rigid-Body Motion Previously: Point dimensionless objects moving through a trajectory. Today: Objects with dimensions, moving as one piece. 2 Rigid-Body Kinematics Objects as sets of points. Relative distances
Rigid-Body Motion Previously: Point dimensionless objects moving through a trajectory. Today: Objects with dimensions, moving as one piece. 2 Rigid-Body Kinematics Objects as sets of points. Relative distances
Rotational kinematics
 Rotational kinematics Suppose you cut a circle out of a piece of paper and then several pieces of string which are just as long as the radius of the paper circle. If you then begin to lay these pieces
Rotational kinematics Suppose you cut a circle out of a piece of paper and then several pieces of string which are just as long as the radius of the paper circle. If you then begin to lay these pieces
Rotational & Rigid-Body Mechanics. Lectures 3+4
 Rotational & Rigid-Body Mechanics Lectures 3+4 Rotational Motion So far: point objects moving through a trajectory. Next: moving actual dimensional objects and rotating them. 2 Circular Motion - Definitions
Rotational & Rigid-Body Mechanics Lectures 3+4 Rotational Motion So far: point objects moving through a trajectory. Next: moving actual dimensional objects and rotating them. 2 Circular Motion - Definitions
Chapter 10 Rotational Kinematics and Energy. Copyright 2010 Pearson Education, Inc.
 Chapter 10 Rotational Kinematics and Energy Copyright 010 Pearson Education, Inc. 10-1 Angular Position, Velocity, and Acceleration Copyright 010 Pearson Education, Inc. 10-1 Angular Position, Velocity,
Chapter 10 Rotational Kinematics and Energy Copyright 010 Pearson Education, Inc. 10-1 Angular Position, Velocity, and Acceleration Copyright 010 Pearson Education, Inc. 10-1 Angular Position, Velocity,
Translational vs Rotational. m x. Connection Δ = = = = = = Δ = = = = = = Δ =Δ = = = = = 2 / 1/2. Work
 Translational vs Rotational / / 1/ Δ m x v dx dt a dv dt F ma p mv KE mv Work Fd / / 1/ θ ω θ α ω τ α ω ω τθ Δ I d dt d dt I L I KE I Work / θ ω α τ Δ Δ c t s r v r a v r a r Fr L pr Connection Translational
Translational vs Rotational / / 1/ Δ m x v dx dt a dv dt F ma p mv KE mv Work Fd / / 1/ θ ω θ α ω τ α ω ω τθ Δ I d dt d dt I L I KE I Work / θ ω α τ Δ Δ c t s r v r a v r a r Fr L pr Connection Translational
Chapter 10.A. Rotation of Rigid Bodies
 Chapter 10.A Rotation of Rigid Bodies P. Lam 7_23_2018 Learning Goals for Chapter 10.1 Understand the equations govern rotational kinematics, and know how to apply them. Understand the physical meanings
Chapter 10.A Rotation of Rigid Bodies P. Lam 7_23_2018 Learning Goals for Chapter 10.1 Understand the equations govern rotational kinematics, and know how to apply them. Understand the physical meanings
Two Dimensional Rotational Kinematics Challenge Problem Solutions
 Two Dimensional Rotational Kinematics Challenge Problem Solutions Problem 1: Moment of Inertia: Uniform Disc A thin uniform disc of mass M and radius R is mounted on an axis passing through the center
Two Dimensional Rotational Kinematics Challenge Problem Solutions Problem 1: Moment of Inertia: Uniform Disc A thin uniform disc of mass M and radius R is mounted on an axis passing through the center
Rotational Kinematics
 Rotational Kinematics Rotational Coordinates Ridged objects require six numbers to describe their position and orientation: 3 coordinates 3 axes of rotation Rotational Coordinates Use an angle θ to describe
Rotational Kinematics Rotational Coordinates Ridged objects require six numbers to describe their position and orientation: 3 coordinates 3 axes of rotation Rotational Coordinates Use an angle θ to describe
16. Rotational Dynamics
 6. Rotational Dynamics A Overview In this unit we will address examples that combine both translational and rotational motion. We will find that we will need both Newton s second law and the rotational
6. Rotational Dynamics A Overview In this unit we will address examples that combine both translational and rotational motion. We will find that we will need both Newton s second law and the rotational
MULTIVARIABLE INTEGRATION
 MULTIVARIABLE INTEGRATION (SPHERICAL POLAR COORDINATES) Question 1 a) Determine with the aid of a diagram an expression for the volume element in r, θ, ϕ. spherical polar coordinates, ( ) [You may not
MULTIVARIABLE INTEGRATION (SPHERICAL POLAR COORDINATES) Question 1 a) Determine with the aid of a diagram an expression for the volume element in r, θ, ϕ. spherical polar coordinates, ( ) [You may not
Torque and Rotation Lecture 7
 Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Rotational Motion, Torque, Angular Acceleration, and Moment of Inertia. 8.01t Nov 3, 2004
 Rotational Motion, Torque, Angular Acceleration, and Moment of Inertia 8.01t Nov 3, 2004 Rotation and Translation of Rigid Body Motion of a thrown object Translational Motion of the Center of Mass Total
Rotational Motion, Torque, Angular Acceleration, and Moment of Inertia 8.01t Nov 3, 2004 Rotation and Translation of Rigid Body Motion of a thrown object Translational Motion of the Center of Mass Total
Chap10. Rotation of a Rigid Object about a Fixed Axis
 Chap10. Rotation of a Rigid Object about a Fixed Axis Level : AP Physics Teacher : Kim 10.1 Angular Displacement, Velocity, and Acceleration - A rigid object rotating about a fixed axis through O perpendicular
Chap10. Rotation of a Rigid Object about a Fixed Axis Level : AP Physics Teacher : Kim 10.1 Angular Displacement, Velocity, and Acceleration - A rigid object rotating about a fixed axis through O perpendicular
Rotational Kinetic Energy
 Lecture 17, Chapter 10: Rotational Energy and Angular Momentum 1 Rotational Kinetic Energy Consider a rigid body rotating with an angular velocity ω about an axis. Clearly every point in the rigid body
Lecture 17, Chapter 10: Rotational Energy and Angular Momentum 1 Rotational Kinetic Energy Consider a rigid body rotating with an angular velocity ω about an axis. Clearly every point in the rigid body
General Physics I. Lecture 8: Rotation of a Rigid Object About a Fixed Axis. Prof. WAN, Xin ( 万歆 )
") General Physics I Lecture 8: Rotation of a Rigid Object About a Fixed Axis Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ New Territory Object In the past, point particle (no rotation,
General Physics I Lecture 8: Rotation of a Rigid Object About a Fixed Axis Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ New Territory Object In the past, point particle (no rotation,
Angular Displacement (θ)
") Rotational Motion Angular Displacement, Velocity, Acceleration Rotation w/constant angular acceleration Linear vs. Angular Kinematics Rotational Energy Parallel Axis Thm. Angular Displacement (θ) Angular
Rotational Motion Angular Displacement, Velocity, Acceleration Rotation w/constant angular acceleration Linear vs. Angular Kinematics Rotational Energy Parallel Axis Thm. Angular Displacement (θ) Angular
Calculating Moments of Inertia
 Calculating Moments of Inertia Lana Sheridan 1 Definitions The moment of inertia, I of an object for a particular axis is the constant that links the applied torque τ about that axis to the angular acceleration
Calculating Moments of Inertia Lana Sheridan 1 Definitions The moment of inertia, I of an object for a particular axis is the constant that links the applied torque τ about that axis to the angular acceleration
particle p = m v F ext = d P = M d v cm dt
 Lecture 11: Momentum and Collisions; Introduction to Rotation 1 REVIEW: (Chapter 8) LINEAR MOMENTUM and COLLISIONS The first new physical quantity introduced in Chapter 8 is Linear Momentum Linear Momentum
Lecture 11: Momentum and Collisions; Introduction to Rotation 1 REVIEW: (Chapter 8) LINEAR MOMENTUM and COLLISIONS The first new physical quantity introduced in Chapter 8 is Linear Momentum Linear Momentum
8 Rotational motion of solid objects
 8 Rotational motion of solid objects Kinematics of rotations PHY166 Fall 005 In this Lecture we call solid objects such extended objects that are rigid (nondeformable) and thus retain their shape. In contrast
8 Rotational motion of solid objects Kinematics of rotations PHY166 Fall 005 In this Lecture we call solid objects such extended objects that are rigid (nondeformable) and thus retain their shape. In contrast
Dynamics 12e. Copyright 2010 Pearson Education South Asia Pte Ltd. Chapter 20 3D Kinematics of a Rigid Body
 Engineering Mechanics: Dynamics 12e Chapter 20 3D Kinematics of a Rigid Body Chapter Objectives Kinematics of a body subjected to rotation about a fixed axis and general plane motion. Relative-motion analysis
Engineering Mechanics: Dynamics 12e Chapter 20 3D Kinematics of a Rigid Body Chapter Objectives Kinematics of a body subjected to rotation about a fixed axis and general plane motion. Relative-motion analysis
Notes on Torque. We ve seen that if we define torque as rfsinθ, and the N 2. i i
 Notes on Torque We ve seen that if we define torque as rfsinθ, and the moment of inertia as N, we end up with an equation mr i= 1 that looks just like Newton s Second Law There is a crucial difference,
Notes on Torque We ve seen that if we define torque as rfsinθ, and the moment of inertia as N, we end up with an equation mr i= 1 that looks just like Newton s Second Law There is a crucial difference,
PHYS 211 Lecture 21 - Moments of inertia 21-1
 PHYS 211 Lecture 21 - Moments of inertia 21-1 Lecture 21 - Moments of inertia Text: similar to Fowles and Cassiday, Chap. 8 As discussed previously, the moment of inertia I f a single mass m executing
PHYS 211 Lecture 21 - Moments of inertia 21-1 Lecture 21 - Moments of inertia Text: similar to Fowles and Cassiday, Chap. 8 As discussed previously, the moment of inertia I f a single mass m executing
CHAPTER 10 ROTATION OF A RIGID OBJECT ABOUT A FIXED AXIS WEN-BIN JIAN ( 簡紋濱 ) DEPARTMENT OF ELECTROPHYSICS NATIONAL CHIAO TUNG UNIVERSITY
 DEPARTMENT OF ELECTROPHYSICS NATIONAL CHIAO TUNG UNIVERSITY") CHAPTER 10 ROTATION OF A RIGID OBJECT ABOUT A FIXED AXIS WEN-BIN JIAN ( 簡紋濱 ) DEPARTMENT OF ELECTROPHYSICS NATIONAL CHIAO TUNG UNIVERSITY OUTLINE 1. Angular Position, Velocity, and Acceleration 2. Rotational
CHAPTER 10 ROTATION OF A RIGID OBJECT ABOUT A FIXED AXIS WEN-BIN JIAN ( 簡紋濱 ) DEPARTMENT OF ELECTROPHYSICS NATIONAL CHIAO TUNG UNIVERSITY OUTLINE 1. Angular Position, Velocity, and Acceleration 2. Rotational
CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS. Prof. N. Harnew University of Oxford TT 2017
 CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS Prof. N. Harnew University of Oxford TT 2017 1 OUTLINE : CP1 REVISION LECTURE 3 : INTRODUCTION TO CLASSICAL MECHANICS 1. Angular velocity and
CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS Prof. N. Harnew University of Oxford TT 2017 1 OUTLINE : CP1 REVISION LECTURE 3 : INTRODUCTION TO CLASSICAL MECHANICS 1. Angular velocity and
Lecture Outline Chapter 10. Physics, 4 th Edition James S. Walker. Copyright 2010 Pearson Education, Inc.
 Lecture Outline Chapter 10 Physics, 4 th Edition James S. Walker Chapter 10 Rotational Kinematics and Energy Units of Chapter 10 Angular Position, Velocity, and Acceleration Rotational Kinematics Connections
Lecture Outline Chapter 10 Physics, 4 th Edition James S. Walker Chapter 10 Rotational Kinematics and Energy Units of Chapter 10 Angular Position, Velocity, and Acceleration Rotational Kinematics Connections
Fundamentals Physics. Chapter 10 Rotation
 Fundamentals Physics Tenth Edition Halliday Chapter 10 Rotation 10-1 Rotational Variables (1 of 15) Learning Objectives 10.01 Identify that if all parts of a body rotate around a fixed axis locked together,
Fundamentals Physics Tenth Edition Halliday Chapter 10 Rotation 10-1 Rotational Variables (1 of 15) Learning Objectives 10.01 Identify that if all parts of a body rotate around a fixed axis locked together,
APM1612. Tutorial letter 203/1/2018. Mechanics 2. Semester 1. Department of Mathematical Sciences APM1612/203/1/2018
 APM6/03//08 Tutorial letter 03//08 Mechanics APM6 Semester Department of Mathematical Sciences IMPORTANT INFORMATION: This tutorial letter contains solutions to assignment 3, Sem. BARCODE Define tomorrow.
APM6/03//08 Tutorial letter 03//08 Mechanics APM6 Semester Department of Mathematical Sciences IMPORTANT INFORMATION: This tutorial letter contains solutions to assignment 3, Sem. BARCODE Define tomorrow.
Chapter 10. Rotation
 Chapter 10 Rotation Rotation Rotational Kinematics: Angular velocity and Angular Acceleration Rotational Kinetic Energy Moment of Inertia Newton s nd Law for Rotation Applications MFMcGraw-PHY 45 Chap_10Ha-Rotation-Revised
Chapter 10 Rotation Rotation Rotational Kinematics: Angular velocity and Angular Acceleration Rotational Kinetic Energy Moment of Inertia Newton s nd Law for Rotation Applications MFMcGraw-PHY 45 Chap_10Ha-Rotation-Revised
Rotation Basics. I. Angular Position A. Background
 Rotation Basics I. Angular Position A. Background Consider a student who is riding on a merry-go-round. We can represent the student s location by using either Cartesian coordinates or by using cylindrical
Rotation Basics I. Angular Position A. Background Consider a student who is riding on a merry-go-round. We can represent the student s location by using either Cartesian coordinates or by using cylindrical
31 ROTATIONAL KINEMATICS
 31 ROTATIONAL KINEMATICS 1. Compare and contrast circular motion and rotation? Address the following Which involves an object and which involves a system? Does an object/system in circular motion have
31 ROTATIONAL KINEMATICS 1. Compare and contrast circular motion and rotation? Address the following Which involves an object and which involves a system? Does an object/system in circular motion have
Rotation. PHYS 101 Previous Exam Problems CHAPTER
 PHYS 101 Previous Exam Problems CHAPTER 10 Rotation Rotational kinematics Rotational inertia (moment of inertia) Kinetic energy Torque Newton s 2 nd law Work, power & energy conservation 1. Assume that
PHYS 101 Previous Exam Problems CHAPTER 10 Rotation Rotational kinematics Rotational inertia (moment of inertia) Kinetic energy Torque Newton s 2 nd law Work, power & energy conservation 1. Assume that
Chapters 10 & 11: Rotational Dynamics Thursday March 8 th
 Chapters 10 & 11: Rotational Dynamics Thursday March 8 th Review of rotational kinematics equations Review and more on rotational inertia Rolling motion as rotation and translation Rotational kinetic energy
Chapters 10 & 11: Rotational Dynamics Thursday March 8 th Review of rotational kinematics equations Review and more on rotational inertia Rolling motion as rotation and translation Rotational kinetic energy
Handout 7: Torque, angular momentum, rotational kinetic energy and rolling motion. Torque and angular momentum
 Handout 7: Torque, angular momentum, rotational kinetic energy and rolling motion Torque and angular momentum In Figure, in order to turn a rod about a fixed hinge at one end, a force F is applied at a
Handout 7: Torque, angular momentum, rotational kinetic energy and rolling motion Torque and angular momentum In Figure, in order to turn a rod about a fixed hinge at one end, a force F is applied at a
Circular Motion, Pt 2: Angular Dynamics. Mr. Velazquez AP/Honors Physics
 Circular Motion, Pt 2: Angular Dynamics Mr. Velazquez AP/Honors Physics Formulas: Angular Kinematics (θ must be in radians): s = rθ Arc Length 360 = 2π rads = 1 rev ω = θ t = v t r Angular Velocity α av
Circular Motion, Pt 2: Angular Dynamics Mr. Velazquez AP/Honors Physics Formulas: Angular Kinematics (θ must be in radians): s = rθ Arc Length 360 = 2π rads = 1 rev ω = θ t = v t r Angular Velocity α av
Rotation. Kinematics Rigid Bodies Kinetic Energy. Torque Rolling. featuring moments of Inertia
 Rotation Kinematics Rigid Bodies Kinetic Energy featuring moments of Inertia Torque Rolling Angular Motion We think about rotation in the same basic way we do about linear motion How far does it go? How
Rotation Kinematics Rigid Bodies Kinetic Energy featuring moments of Inertia Torque Rolling Angular Motion We think about rotation in the same basic way we do about linear motion How far does it go? How
General Physics I. Lecture 8: Rotation of a Rigid Object About a Fixed Axis. Prof. WAN, Xin ( 万歆 )
") General Physics I Lecture 8: Rotation of a Rigid Object About a Fixed Axis Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ New Territory Object In the past, point particle (no rotation,
General Physics I Lecture 8: Rotation of a Rigid Object About a Fixed Axis Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ New Territory Object In the past, point particle (no rotation,
Physics 2A Chapter 10 - Rotational Motion Fall 2018
 Physics A Chapter 10 - Rotational Motion Fall 018 These notes are five pages. A quick summary: The concepts of rotational motion are a direct mirror image of the same concepts in linear motion. Follow
Physics A Chapter 10 - Rotational Motion Fall 018 These notes are five pages. A quick summary: The concepts of rotational motion are a direct mirror image of the same concepts in linear motion. Follow
Chapter 12: Rotation of Rigid Bodies. Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics
 Chapter 1: Rotation of Rigid Bodies Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics Translational vs Rotational / / 1/ m x v dx dt a dv dt F ma p mv KE mv Work Fd P Fv / / 1/ I
Chapter 1: Rotation of Rigid Bodies Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics Translational vs Rotational / / 1/ m x v dx dt a dv dt F ma p mv KE mv Work Fd P Fv / / 1/ I
Calculating Moments of Inertia
 OpenStax-CNX module: m58330 1 Calculating Moments of Inertia OpenStax This work is produced by OpenStax-CNX and licensed under the Creative Commons Attribution License 4.0 By the end of this section, you
OpenStax-CNX module: m58330 1 Calculating Moments of Inertia OpenStax This work is produced by OpenStax-CNX and licensed under the Creative Commons Attribution License 4.0 By the end of this section, you
Physics 2210 Fall smartphysics 14 Rotational kinematics 15 Parallel Axis Theorem and Torque 11/09/2015
 Physics 2210 Fall 2015 smartphysics 14 Rotational kinematics 15 Parallel Axis Theorem and Torque 11/09/2015 Exam 3 Results Unit 14 Main Points 2/2 This table will be provided on the front page of exam
Physics 2210 Fall 2015 smartphysics 14 Rotational kinematics 15 Parallel Axis Theorem and Torque 11/09/2015 Exam 3 Results Unit 14 Main Points 2/2 This table will be provided on the front page of exam
Angular velocity and angular acceleration CHAPTER 9 ROTATION. Angular velocity and angular acceleration. ! equations of rotational motion
 Angular velocity and angular acceleration CHAPTER 9 ROTATION! r i ds i dθ θ i Angular velocity and angular acceleration! equations of rotational motion Torque and Moment of Inertia! Newton s nd Law for
Angular velocity and angular acceleration CHAPTER 9 ROTATION! r i ds i dθ θ i Angular velocity and angular acceleration! equations of rotational motion Torque and Moment of Inertia! Newton s nd Law for
Classical Mechanics Lecture 15
 Classical Mechanics Lecture 5 Today s Concepts: a) Parallel Axis Theorem b) Torque & Angular Acceleration Mechanics Lecture 5, Slide Unit 4 Main Points Mechanics Lecture 4, Slide Unit 4 Main Points Mechanics
Classical Mechanics Lecture 5 Today s Concepts: a) Parallel Axis Theorem b) Torque & Angular Acceleration Mechanics Lecture 5, Slide Unit 4 Main Points Mechanics Lecture 4, Slide Unit 4 Main Points Mechanics
General Physics I. Lecture 10: Rolling Motion and Angular Momentum.
 General Physics I Lecture 10: Rolling Motion and Angular Momentum Prof. WAN, Xin (万歆) 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Rolling motion of a rigid object: center-of-mass motion
General Physics I Lecture 10: Rolling Motion and Angular Momentum Prof. WAN, Xin (万歆) 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Rolling motion of a rigid object: center-of-mass motion
MATH 280 Multivariate Calculus Fall Integration over a curve
 dr dr y MATH 28 Multivariate Calculus Fall 211 Integration over a curve Given a curve C in the plane or in space, we can (conceptually) break it into small pieces each of which has a length ds. In some
dr dr y MATH 28 Multivariate Calculus Fall 211 Integration over a curve Given a curve C in the plane or in space, we can (conceptually) break it into small pieces each of which has a length ds. In some
MATH 280 Multivariate Calculus Fall Integration over a surface. da. A =
 MATH 28 Multivariate Calculus Fall 212 Integration over a surface Given a surface S in space, we can (conceptually) break it into small pieces each of which has area da. In me cases, we will add up these
MATH 28 Multivariate Calculus Fall 212 Integration over a surface Given a surface S in space, we can (conceptually) break it into small pieces each of which has area da. In me cases, we will add up these
Physics 4A Solutions to Chapter 10 Homework
 Physics 4A Solutions to Chapter 0 Homework Chapter 0 Questions: 4, 6, 8 Exercises & Problems 6, 3, 6, 4, 45, 5, 5, 7, 8 Answers to Questions: Q 0-4 (a) positive (b) zero (c) negative (d) negative Q 0-6
Physics 4A Solutions to Chapter 0 Homework Chapter 0 Questions: 4, 6, 8 Exercises & Problems 6, 3, 6, 4, 45, 5, 5, 7, 8 Answers to Questions: Q 0-4 (a) positive (b) zero (c) negative (d) negative Q 0-6
Physics 141 Rotational Motion 1 Page 1. Rotational Motion 1. We're going to turn this team around 360 degrees.! Jason Kidd
 Physics 141 Rotational Motion 1 Page 1 Rotational Motion 1 We're going to turn this team around 360 degrees.! Jason Kidd Rigid bodies To a good approximation, a solid object behaves like a perfectly rigid
Physics 141 Rotational Motion 1 Page 1 Rotational Motion 1 We're going to turn this team around 360 degrees.! Jason Kidd Rigid bodies To a good approximation, a solid object behaves like a perfectly rigid
Physics of Rotation. Physics 109, Introduction To Physics Fall 2017
 Physics of Rotation Physics 109, Introduction To Physics Fall 017 Outline Next two lab periods Rolling without slipping Angular Momentum Comparison with Translation New Rotational Terms Rotational and
Physics of Rotation Physics 109, Introduction To Physics Fall 017 Outline Next two lab periods Rolling without slipping Angular Momentum Comparison with Translation New Rotational Terms Rotational and
14.1. Multiple Integration. Iterated Integrals and Area in the Plane. Iterated Integrals. Iterated Integrals. MAC2313 Calculus III - Chapter 14
 14 Multiple Integration 14.1 Iterated Integrals and Area in the Plane Objectives Evaluate an iterated integral. Use an iterated integral to find the area of a plane region. Copyright Cengage Learning.
14 Multiple Integration 14.1 Iterated Integrals and Area in the Plane Objectives Evaluate an iterated integral. Use an iterated integral to find the area of a plane region. Copyright Cengage Learning.
In-Class Problems 30-32: Moment of Inertia, Torque, and Pendulum: Solutions
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Physics Physics 8.01 TEAL Fall Term 004 In-Class Problems 30-3: Moment of Inertia, Torque, and Pendulum: Solutions Problem 30 Moment of Inertia of a
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Physics Physics 8.01 TEAL Fall Term 004 In-Class Problems 30-3: Moment of Inertia, Torque, and Pendulum: Solutions Problem 30 Moment of Inertia of a
Figure 21:The polar and Cartesian coordinate systems.
 Figure 21:The polar and Cartesian coordinate systems. Coordinate systems in R There are three standard coordinate systems which are used to describe points in -dimensional space. These coordinate systems
Figure 21:The polar and Cartesian coordinate systems. Coordinate systems in R There are three standard coordinate systems which are used to describe points in -dimensional space. These coordinate systems
Conservation of Angular Momentum
 Physics 101 Section 3 March 3 rd : Ch. 10 Announcements: Monday s Review Posted (in Plummer s section (4) Today start Ch. 10. Next Quiz will be next week Test# (Ch. 7-9) will be at 6 PM, March 3, Lockett-6
Physics 101 Section 3 March 3 rd : Ch. 10 Announcements: Monday s Review Posted (in Plummer s section (4) Today start Ch. 10. Next Quiz will be next week Test# (Ch. 7-9) will be at 6 PM, March 3, Lockett-6
Lab 9 - Rotational Dynamics
 145 Name Date Partners Lab 9 - Rotational Dynamics OBJECTIVES To study angular motion including angular velocity and angular acceleration. To relate rotational inertia to angular motion. To determine kinetic
145 Name Date Partners Lab 9 - Rotational Dynamics OBJECTIVES To study angular motion including angular velocity and angular acceleration. To relate rotational inertia to angular motion. To determine kinetic
15.3. Moment of inertia. Introduction. Prerequisites. Learning Outcomes
 Moment of inertia 15.3 Introduction In this section we show how integration is used to calculate moments of inertia. These are essential for an understanding of the dynamics of rotating bodies such as
Moment of inertia 15.3 Introduction In this section we show how integration is used to calculate moments of inertia. These are essential for an understanding of the dynamics of rotating bodies such as
Rotation of Rigid Objects
 Notes 12 Rotation and Extended Objects Page 1 Rotation of Rigid Objects Real objects have "extent". The mass is spread out over discrete or continuous positions. THERE IS A DISTRIBUTION OF MASS TO "AN
Notes 12 Rotation and Extended Objects Page 1 Rotation of Rigid Objects Real objects have "extent". The mass is spread out over discrete or continuous positions. THERE IS A DISTRIBUTION OF MASS TO "AN
Motion Part 4: Projectile Motion
 Motion Part 4: Projectile Motion Last modified: 28/03/2017 CONTENTS Projectile Motion Uniform Motion Equations Projectile Motion Equations Trajectory How to Approach Problems Example 1 Example 2 Example
Motion Part 4: Projectile Motion Last modified: 28/03/2017 CONTENTS Projectile Motion Uniform Motion Equations Projectile Motion Equations Trajectory How to Approach Problems Example 1 Example 2 Example
ω = 0 a = 0 = α P = constant L = constant dt = 0 = d Equilibrium when: τ i = 0 τ net τ i Static Equilibrium when: F z = 0 F net = F i = ma = d P
 Equilibrium when: F net = F i τ net = τ i a = 0 = α dp = 0 = d L = ma = d P = 0 = I α = d L = 0 P = constant L = constant F x = 0 τ i = 0 F y = 0 F z = 0 Static Equilibrium when: P = 0 L = 0 v com = 0
Equilibrium when: F net = F i τ net = τ i a = 0 = α dp = 0 = d L = ma = d P = 0 = I α = d L = 0 P = constant L = constant F x = 0 τ i = 0 F y = 0 F z = 0 Static Equilibrium when: P = 0 L = 0 v com = 0
EQUATIONS OF MOTION: ROTATION ABOUT A FIXED AXIS (Section 17.4) Today s Objectives: Students will be able to analyze the planar kinetics of a rigid
 Today s Objectives: Students will be able to analyze the planar kinetics of a rigid") EQUATIONS OF MOTION: ROTATION ABOUT A FIXED AXIS (Section 17.4) Today s Objectives: Students will be able to analyze the planar kinetics of a rigid body undergoing rotational motion. APPLICATIONS The crank
EQUATIONS OF MOTION: ROTATION ABOUT A FIXED AXIS (Section 17.4) Today s Objectives: Students will be able to analyze the planar kinetics of a rigid body undergoing rotational motion. APPLICATIONS The crank
AP Physics QUIZ Chapters 10
 Name: 1. Torque is the rotational analogue of (A) Kinetic Energy (B) Linear Momentum (C) Acceleration (D) Force (E) Mass A 5-kilogram sphere is connected to a 10-kilogram sphere by a rigid rod of negligible
Name: 1. Torque is the rotational analogue of (A) Kinetic Energy (B) Linear Momentum (C) Acceleration (D) Force (E) Mass A 5-kilogram sphere is connected to a 10-kilogram sphere by a rigid rod of negligible
DYNAMICS OF RIGID BODIES
 DYNAMICS OF RIGID BODIES Measuring angles in radian Define the value of an angle θ in radian as θ = s r, or arc length s = rθ a pure number, without dimension independent of radius r of the circle one
DYNAMICS OF RIGID BODIES Measuring angles in radian Define the value of an angle θ in radian as θ = s r, or arc length s = rθ a pure number, without dimension independent of radius r of the circle one
Uniform Circular Motion:-Circular motion is said to the uniform if the speed of the particle (along the circular path) remains constant.
 remains constant.") Circular Motion:- Uniform Circular Motion:-Circular motion is said to the uniform if the speed of the particle (along the circular path) remains constant. Angular Displacement:- Scalar form:-?s = r?θ Vector
Circular Motion:- Uniform Circular Motion:-Circular motion is said to the uniform if the speed of the particle (along the circular path) remains constant. Angular Displacement:- Scalar form:-?s = r?θ Vector
Two small balls, each of mass m, with perpendicular bisector of the line joining the two balls as the axis of rotation:
 PHYSCS LOCUS 17 summation in mi ri becomes an integration. We imagine the body to be subdivided into infinitesimal elements, each of mass dm, as shown in figure 7.17. Let r be the distance from such an
PHYSCS LOCUS 17 summation in mi ri becomes an integration. We imagine the body to be subdivided into infinitesimal elements, each of mass dm, as shown in figure 7.17. Let r be the distance from such an
Oscillatory Motion. Solutions of Selected Problems
 Chapter 15 Oscillatory Motion. Solutions of Selected Problems 15.1 Problem 15.18 (In the text book) A block-spring system oscillates with an amplitude of 3.50 cm. If the spring constant is 250 N/m and
Chapter 15 Oscillatory Motion. Solutions of Selected Problems 15.1 Problem 15.18 (In the text book) A block-spring system oscillates with an amplitude of 3.50 cm. If the spring constant is 250 N/m and
Connection between angular and linear speed
 Connection between angular and linear speed If a point-like object is in motion on a circular path of radius R at an instantaneous speed v, then its instantaneous angular speed ω is v = ω R Example: A
Connection between angular and linear speed If a point-like object is in motion on a circular path of radius R at an instantaneous speed v, then its instantaneous angular speed ω is v = ω R Example: A
 第 1 頁, 共 7 頁 Chap10 1. Test Bank, Question 3 One revolution per minute is about: 0.0524 rad/s 0.105 rad/s 0.95 rad/s 1.57 rad/s 6.28 rad/s 2. *Chapter 10, Problem 8 The angular acceleration of a wheel
第 1 頁, 共 7 頁 Chap10 1. Test Bank, Question 3 One revolution per minute is about: 0.0524 rad/s 0.105 rad/s 0.95 rad/s 1.57 rad/s 6.28 rad/s 2. *Chapter 10, Problem 8 The angular acceleration of a wheel
Physics Fall Mechanics, Thermodynamics, Waves, Fluids. Lecture 20: Rotational Motion. Slide 20-1
 Physics 1501 Fall 2008 Mechanics, Thermodynamics, Waves, Fluids Lecture 20: Rotational Motion Slide 20-1 Recap: center of mass, linear momentum A composite system behaves as though its mass is concentrated
Physics 1501 Fall 2008 Mechanics, Thermodynamics, Waves, Fluids Lecture 20: Rotational Motion Slide 20-1 Recap: center of mass, linear momentum A composite system behaves as though its mass is concentrated
Rotation. I. Kinematics - Angular analogs
 Rotation I. Kinematics - Angular analogs II. III. IV. Dynamics - Torque and Rotational Inertia Work and Energy Angular Momentum - Bodies and particles V. Elliptical Orbits The student will be able to:
Rotation I. Kinematics - Angular analogs II. III. IV. Dynamics - Torque and Rotational Inertia Work and Energy Angular Momentum - Bodies and particles V. Elliptical Orbits The student will be able to:
Chapter 10 Rotational Kinematics and Energy. Copyright 2010 Pearson Education, Inc.
 Chapter 10 Rotational Kinematics and Energy 10-1 Angular Position, Velocity, and Acceleration 10-1 Angular Position, Velocity, and Acceleration Degrees and revolutions: 10-1 Angular Position, Velocity,
Chapter 10 Rotational Kinematics and Energy 10-1 Angular Position, Velocity, and Acceleration 10-1 Angular Position, Velocity, and Acceleration Degrees and revolutions: 10-1 Angular Position, Velocity,
E = K + U. p mv. p i = p f. F dt = p. J t 1. a r = v2. F c = m v2. s = rθ. a t = rα. r 2 dm i. m i r 2 i. I ring = MR 2.
 v = v i + at x = x i + v i t + 1 2 at2 E = K + U p mv p i = p f L r p = Iω τ r F = rf sin θ v 2 = v 2 i + 2a x F = ma = dp dt = U v dx dt a dv dt = d2 x dt 2 A circle = πr 2 A sphere = 4πr 2 V sphere =
v = v i + at x = x i + v i t + 1 2 at2 E = K + U p mv p i = p f L r p = Iω τ r F = rf sin θ v 2 = v 2 i + 2a x F = ma = dp dt = U v dx dt a dv dt = d2 x dt 2 A circle = πr 2 A sphere = 4πr 2 V sphere =
Winter Midterm Review Questions
 Winter Midterm Review Questions PHYS106 February 24, 2008 PHYS106 () Winter Midterm Review Questions February 24, 2008 1 / 12 MassCenter003 Calculate the position of the mass center of the rigid system
Winter Midterm Review Questions PHYS106 February 24, 2008 PHYS106 () Winter Midterm Review Questions February 24, 2008 1 / 12 MassCenter003 Calculate the position of the mass center of the rigid system
Chapter 8 Lecture. Pearson Physics. Rotational Motion and Equilibrium. Prepared by Chris Chiaverina Pearson Education, Inc.
 Chapter 8 Lecture Pearson Physics Rotational Motion and Equilibrium Prepared by Chris Chiaverina Chapter Contents Describing Angular Motion Rolling Motion and the Moment of Inertia Torque Static Equilibrium
Chapter 8 Lecture Pearson Physics Rotational Motion and Equilibrium Prepared by Chris Chiaverina Chapter Contents Describing Angular Motion Rolling Motion and the Moment of Inertia Torque Static Equilibrium
Chapter 8. Rotational Kinematics
 Chapter 8 Rotational Kinematics 8.3 The Equations of Rotational Kinematics 8.4 Angular Variables and Tangential Variables The relationship between the (tangential) arc length, s, at some radius, r, and
Chapter 8 Rotational Kinematics 8.3 The Equations of Rotational Kinematics 8.4 Angular Variables and Tangential Variables The relationship between the (tangential) arc length, s, at some radius, r, and
Circular motion. Aug. 22, 2017
 Circular motion Aug. 22, 2017 Until now, we have been observers to Newtonian physics through inertial reference frames. From our discussion of Newton s laws, these are frames which obey Newton s first
Circular motion Aug. 22, 2017 Until now, we have been observers to Newtonian physics through inertial reference frames. From our discussion of Newton s laws, these are frames which obey Newton s first
Department of Physics
 Department of Physics PHYS101-051 FINAL EXAM Test Code: 100 Tuesday, 4 January 006 in Building 54 Exam Duration: 3 hrs (from 1:30pm to 3:30pm) Name: Student Number: Section Number: Page 1 1. A car starts
Department of Physics PHYS101-051 FINAL EXAM Test Code: 100 Tuesday, 4 January 006 in Building 54 Exam Duration: 3 hrs (from 1:30pm to 3:30pm) Name: Student Number: Section Number: Page 1 1. A car starts
We define angular displacement, θ, and angular velocity, ω. What's a radian?
 We define angular displacement, θ, and angular velocity, ω Units: θ = rad ω = rad/s What's a radian? Radian is the ratio between the length of an arc and its radius note: counterclockwise is + clockwise
We define angular displacement, θ, and angular velocity, ω Units: θ = rad ω = rad/s What's a radian? Radian is the ratio between the length of an arc and its radius note: counterclockwise is + clockwise