Articulated body dynamics
|
|
|
- Thomasina Skinner
- 6 years ago
- Views:
Transcription






1 Articulated rigid bodies Articulated body dynamics Beyond human models How would you represent a pose? Quadraped animals Wavy hair Animal fur Plants
2 Maximal vs. reduced coordinates How are things connected? Maximal coordinates (x 1, R 1 ) (x 0, R 0 ) Reduced coordinates θ 0, φ 0, ψ 0 θ 1, φ 1 Maximal coordinate Treat each body part as a separate rigid body Use explicit constraints to connect body parts Reduced coordinate (x 2, R 2 ) state variables: 6m Assuming there are m links and n DOFs in the articulated body, how many constraints do we need to keep links connected correctly in maximal coordinates? θ 2 state variables: n Use joint angles directly as state variables Hard to derive the equation of motion for articulated bodies Maximal coordinates Reduced coordinates Direct extension of well understood rigid body dynamics; easy to understand and implement Operate in Cartesian space; hard to evaluate joint angles and velocities enforce joint limits apply internal joint torques Joint space is more intuitive when dealing with complex multi-body structures Fewer DOFs and fewer constraints Well suited for character motion and motion control Inaccuracy in numeric integration can cause body parts to drift apart
3 Forward simulation Featherstone s algorithm Given current state, current velocity, external forces, and joint torques, compute the current acceleration of the articulated body Featherstone s algorithm Use reduced coordinates to represent motion Given the current joint q, current joint velocity q, external forces F E and joint torque G, compute the joint acceleration q in linear time q = f(q, q, F E, G) Lagrangian method link λ(i) joint i connects link i and its parent link i Spatial notation Spatial velocity of each link Spatial notation combines linear and angular quantities Two ordinary 3-dimensional vectors are replaced by a single 6-dimensional spatial vector v i If we let be the velocity of link i, and vi J be the velocity across joint i then v J i = v i v λ(i) [ ωẋ v = [ ωẍ a = ] ] angular velocity of the body linear velocity of the body The joint velocity can also be described in the form v J i = h i q i where h i is a 6 by d i matrix, q is a d i by 1 vector and d i is the degree of freedom of joint i
4 Spatial acceleration of each link Newton-Euler equations Velocity of link i: Equation of motion for link i: v i = v λ(i) + h i q i f i + f E i = I i a i + v i I i v i Acceleration of link i: net force applied to link i through the joints sum of all other forces actin on link i a i = a λ(i) + ḣi q i + h i q i f i = f J i j µ(i) f J j fi J is the force transmitted from link λ(i) µ(i) is the set of children of link i f J i = I i a i + v i I i v i f E i + j µ(i) f J j Acceleration-force relation Featherstone s algorithm The acceleration of bodies are always linear functions of the applied forces a = Φf + b The equation can be inverted to f = I A a + p A where I A = Φ 1 p A = I A b proc ABM_accelerations( q, q, F E, G) /* first outbound loop */ v 0 = 0 for i = 1 to N - 1 v i = v λ(i) + h i q i /* inbound loop */ Compute_Inertia_Bias(); I A p A articulated body inertia bias force, the force required to bring the body s acceleration to zero /* second outbound loop */ Compute_joint_accel();
5 Inbound loop Second outbound loop Starting at the terminal links, calculate the inertia and bias force for each link in turn I A i p A i = I i + (I A j I A j h j (h T j I A j h j ) 1 h T j I A j ) j µ(i) = p i + (p α j + I A j h j (h T j I A j h j ) 1 (G i h T j p α j )) j µ(i) Compute joint acceleration from the root to the terminal link τ 0 = 0 a λ(0) = 0 for i = 0 to N-1 q i = (h T i I A i h i ) 1 (τ i h T i (I A i a λ(i) + p α i )) a i = a λ(i) + ḣi q i + h i q i where p i = v i I i v i f E i p α j = p A j + I A j ḣj q j f J i = I i a i + v i I i v i f E i + j µ(i) f J j f J i = I A i a i + p A i τ i = h T i f J i Lagrangian method Generalized coordinates d T T Q j = 0 dt q j q j T denotes the kinetic energy Q j is the generalized force associated with coordinate j The configuration of a multi-body system is identify by a set of variables called generalized coordinates These generalized coordinates are independent and completely determine the location and orientation of each body in the system one particle: x, y, z j is the index for DOFs in generalized coordinates one rigid body: x, y, z, θ, φ, ψ articulated bodies: θ 1, φ 1 x, y, z, θ 0, φ 0, ψ 0 θ 2

6 Peaucellier mechanism Generalized forces The purpose of this mechanism is to generate a straight-line motion This mechanism has eight bodies and yet the number of degrees of freedom is one Represent a point r i on the articulated body system by a set of generalized coordinates: r i = r i (q 1, q 2,..., q n ) The virtual displacement of r i can be written in terms of generalized coordinates δr i = r i q 1 δq 1 + r i q 2 δq r i q n δq n The virtual work of force F i acting on r i is r i F i δr i = F i δq j = q j j j Q j = F i r i q j = j Q j δq j Define generalized force associated with coordinate q j r i q j δq j Kinetic energy Lagrangian method T i = 1 ṙ T ṙτ i dx dy dz 2 T i = 1 r T 0 2 ẆT i Ẇ i r 0 τ i dx dy dz T i = 1 tr (Ẇi r 0 r T 0 2 ẆT i T i = 1 ( [ 2 tr Ẇ i T i = 1 2 tr (Ẇi M i Ẇ T i ) τ i dx dy dz ] ) r 0 r T 0 τ i dx dy dz Ẇi T ) r = Wr 0 M i = r 0 r T 0 τ i dx dy dz Put it all together d T i T ( i Wi = tr M i Ẅi T dt q j q j q j ) = Q j Represent external forces f k in terms of generalized coordinates ( ) Wi tr M i Ẅi T = q j k f k p k q j d T Compute i T and i by yourself dt q j q j where f k is acting at the point p k on the articulated body system
7 Acceleration of transformation Constraints Represent Ẅ(q) in terms of q, q and q Compute Ẅ(q) recursively W i = W i 1 R i Ẇ i = Ẇi 1R i + W i 1 Ṙ i Ẅ i = Ẅi 1R i + 2Ẇi 1ṘiW i 1 Ri R(q) = Penalty methods Use proportional derivative (PD) controllers Analytical methods Solve a linear system Acceleration constraints Multiple constraints Given a desired joint acceleration q c, what is the torque that gives rise to it? Force - Acceleration relationship a f = kf + a 0 1. Use test torque g t to compute k q t = kg t + q 0 k = qt q 0 2. Use k to compute the desired joint torque g c = g t qc q 0 q t q 0 h( q f ) h( q 0 ) = kf g t g c Compute the force magnitudes f that satisfy all the acceleration constraints simultaneously h 1 ( q) h 1 ( q 0 ) = k 11 f 1 + k 12 f k 1m f m h 2 ( q) h 2 ( q 0 ) = k 21 f 1 + k 22 f k 2m f m. h m ( q) h m ( q 0 ) = k m1 f 1 + k m2 f k mm f m h h 0 = Kf k ji = 1 fi t (h j ( q t i) h j ( q 0 ))
8 Impact constraints Impact constraints Use impulse to instantaneously change the body s velocities Compute desired acceleration on the body point a p = (v + p v p )/δt v p v + p p Compute the current joint velocities, q! that changes the velocity of body point p instantaneously from to v p v + p Find the appropriate constraint magnitude that satisfy the acceleration constraint f p h( q) = a( q) a p Evaluate the default joint acceleration, q 0,and the acceleration, q p, after f p is applied Compute the joint velocity after the impulse q + = q + ( q p q 0 )δt The simulation step Collision response UpdateConstraintSet(): Collision detection ResolveImpact(): Instantaneously change the relative velocity at the contact point ComputeConstraintForces(): Use constraint forces to prevent interpenetration
9 Joint limits Summary UpdateConstraintSet(): Compare current joints against joint limits ResolveImpact(): Neutralize the joint velocity that violates the joint limit ComputeConstraintForces(): Use constraint torque to set joint acceleration to zero Define phase space a set of coordinates that fully determine the motion Write down the equation of motion Deal with constraints penalty methods vs. analytical methods Particle system Rigid body system phase space: [ x v ] phase space: x R P L equation of motion: f = mẍ constraints: compute the constraint forces equation of motion: f = mẍ τ = I ω + İω constraints: compute impulse and impulsive torque compute contact forces
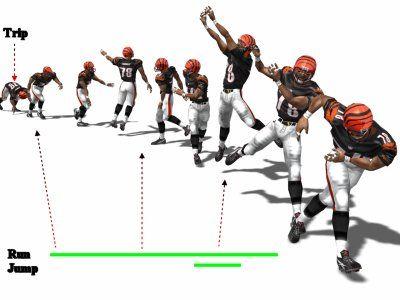
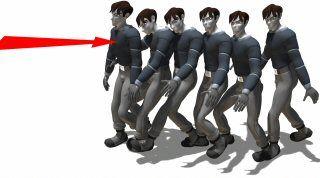
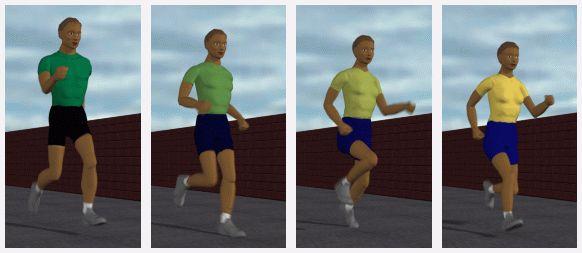
10 Articulated body system What s next? phase space: [ q q ] Is this enough to simulate animal s natural motion? equation of motion: constraints: f i + f E i = I i a i + v i I i v i or d T T Q j = 0 dt q j q j use force - acceleration relationship to compute the constraint torques How do animals use muscles to generate locomotion? We will have our first guest lecture on Thursday Prof. Petros Faloutsos from UCLA
Multibody simulation
 Multibody simulation Dynamics of a multibody system (Euler-Lagrange formulation) Dimitar Dimitrov Örebro University June 16, 2012 Main points covered Euler-Lagrange formulation manipulator inertia matrix
Multibody simulation Dynamics of a multibody system (Euler-Lagrange formulation) Dimitar Dimitrov Örebro University June 16, 2012 Main points covered Euler-Lagrange formulation manipulator inertia matrix
Physics Fall Mechanics, Thermodynamics, Waves, Fluids. Lecture 20: Rotational Motion. Slide 20-1
 Physics 1501 Fall 2008 Mechanics, Thermodynamics, Waves, Fluids Lecture 20: Rotational Motion Slide 20-1 Recap: center of mass, linear momentum A composite system behaves as though its mass is concentrated
Physics 1501 Fall 2008 Mechanics, Thermodynamics, Waves, Fluids Lecture 20: Rotational Motion Slide 20-1 Recap: center of mass, linear momentum A composite system behaves as though its mass is concentrated
Game Physics. Game and Media Technology Master Program - Utrecht University. Dr. Nicolas Pronost
 Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Rigid body physics Particle system Most simple instance of a physics system Each object (body) is a particle Each particle
Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Rigid body physics Particle system Most simple instance of a physics system Each object (body) is a particle Each particle
MSMS Basilio Bona DAUIN PoliTo
 MSMS 214-215 Basilio Bona DAUIN PoliTo Problem 2 The planar system illustrated in Figure 1 consists of a bar B and a wheel W moving (no friction, no sliding) along the bar; the bar can rotate around an
MSMS 214-215 Basilio Bona DAUIN PoliTo Problem 2 The planar system illustrated in Figure 1 consists of a bar B and a wheel W moving (no friction, no sliding) along the bar; the bar can rotate around an
Multibody simulation
 Multibody simulation Dynamics of a multibody system (Newton-Euler formulation) Dimitar Dimitrov Örebro University June 8, 2012 Main points covered Newton-Euler formulation forward dynamics inverse dynamics
Multibody simulation Dynamics of a multibody system (Newton-Euler formulation) Dimitar Dimitrov Örebro University June 8, 2012 Main points covered Newton-Euler formulation forward dynamics inverse dynamics
Announcements. 1. Do not bring the yellow equation sheets to the miderm. Idential sheets will be attached to the problems.
 Announcements 1. Do not bring the yellow equation sheets to the miderm. Idential sheets will be attached to the problems. 2. Some PRS transmitters are missing. Please, bring them back! 1 Kinematics Displacement
Announcements 1. Do not bring the yellow equation sheets to the miderm. Idential sheets will be attached to the problems. 2. Some PRS transmitters are missing. Please, bring them back! 1 Kinematics Displacement
Robotics. Dynamics. Marc Toussaint U Stuttgart
 Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler recursion, general robot dynamics, joint space control, reference trajectory
Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler recursion, general robot dynamics, joint space control, reference trajectory
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
Differential Kinematics
 Differential Kinematics Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space (e.g., Cartesian space) Instantaneous velocity mappings can be obtained through
Differential Kinematics Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space (e.g., Cartesian space) Instantaneous velocity mappings can be obtained through
In most robotic applications the goal is to find a multi-body dynamics description formulated
 Chapter 3 Dynamics Mathematical models of a robot s dynamics provide a description of why things move when forces are generated in and applied on the system. They play an important role for both simulation
Chapter 3 Dynamics Mathematical models of a robot s dynamics provide a description of why things move when forces are generated in and applied on the system. They play an important role for both simulation
Robotics. Dynamics. University of Stuttgart Winter 2018/19
 Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler, joint space control, reference trajectory following, optimal operational
Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler, joint space control, reference trajectory following, optimal operational
Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202)
") J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
Kinematics (special case) Dynamics gravity, tension, elastic, normal, friction. Energy: kinetic, potential gravity, spring + work (friction)
 Dynamics gravity, tension, elastic, normal, friction. Energy: kinetic, potential gravity, spring + work (friction)") Kinematics (special case) a = constant 1D motion 2D projectile Uniform circular Dynamics gravity, tension, elastic, normal, friction Motion with a = constant Newton s Laws F = m a F 12 = F 21 Time & Position
Kinematics (special case) a = constant 1D motion 2D projectile Uniform circular Dynamics gravity, tension, elastic, normal, friction Motion with a = constant Newton s Laws F = m a F 12 = F 21 Time & Position
CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS. Prof. N. Harnew University of Oxford TT 2017
 CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS Prof. N. Harnew University of Oxford TT 2017 1 OUTLINE : CP1 REVISION LECTURE 3 : INTRODUCTION TO CLASSICAL MECHANICS 1. Angular velocity and
CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS Prof. N. Harnew University of Oxford TT 2017 1 OUTLINE : CP1 REVISION LECTURE 3 : INTRODUCTION TO CLASSICAL MECHANICS 1. Angular velocity and
Robot Dynamics II: Trajectories & Motion
 Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
III. Work and Energy
 Rotation I. Kinematics - Angular analogs II. III. IV. Dynamics - Torque and Rotational Inertia Work and Energy Angular Momentum - Bodies and particles V. Elliptical Orbits The student will be able to:
Rotation I. Kinematics - Angular analogs II. III. IV. Dynamics - Torque and Rotational Inertia Work and Energy Angular Momentum - Bodies and particles V. Elliptical Orbits The student will be able to:
Rigid Body Dynamics and Beyond
 Rigid Body Dynamics and Beyond 1 Rigid Bodies 3 A rigid body Collection of particles Distance between any two particles is always constant What types of motions preserve these constraints? Translation,
Rigid Body Dynamics and Beyond 1 Rigid Bodies 3 A rigid body Collection of particles Distance between any two particles is always constant What types of motions preserve these constraints? Translation,
Introduction to Robotics
 J. Zhang, L. Einig 277 / 307 MIN Faculty Department of Informatics Lecture 8 Jianwei Zhang, Lasse Einig [zhang, einig]@informatik.uni-hamburg.de University of Hamburg Faculty of Mathematics, Informatics
J. Zhang, L. Einig 277 / 307 MIN Faculty Department of Informatics Lecture 8 Jianwei Zhang, Lasse Einig [zhang, einig]@informatik.uni-hamburg.de University of Hamburg Faculty of Mathematics, Informatics
Lesson Rigid Body Dynamics
 Lesson 8 Rigid Body Dynamics Lesson 8 Outline Problem definition and motivations Dynamics of rigid bodies The equation of unconstrained motion (ODE) User and time control Demos / tools / libs Rigid Body
Lesson 8 Rigid Body Dynamics Lesson 8 Outline Problem definition and motivations Dynamics of rigid bodies The equation of unconstrained motion (ODE) User and time control Demos / tools / libs Rigid Body
Spatial Vector Algebra
 A Short Course on The Easy Way to do Rigid Body Dynamics Roy Featherstone Dept. Inormation Engineering, RSISE The Australian National University Spatial vector algebra is a concise vector notation or describing
A Short Course on The Easy Way to do Rigid Body Dynamics Roy Featherstone Dept. Inormation Engineering, RSISE The Australian National University Spatial vector algebra is a concise vector notation or describing
Phys 7221 Homework # 8
 Phys 71 Homework # 8 Gabriela González November 15, 6 Derivation 5-6: Torque free symmetric top In a torque free, symmetric top, with I x = I y = I, the angular velocity vector ω in body coordinates with
Phys 71 Homework # 8 Gabriela González November 15, 6 Derivation 5-6: Torque free symmetric top In a torque free, symmetric top, with I x = I y = I, the angular velocity vector ω in body coordinates with
Rotational & Rigid-Body Mechanics. Lectures 3+4
 Rotational & Rigid-Body Mechanics Lectures 3+4 Rotational Motion So far: point objects moving through a trajectory. Next: moving actual dimensional objects and rotating them. 2 Circular Motion - Definitions
Rotational & Rigid-Body Mechanics Lectures 3+4 Rotational Motion So far: point objects moving through a trajectory. Next: moving actual dimensional objects and rotating them. 2 Circular Motion - Definitions
Chapter 10: Rotation. Chapter 10: Rotation
 Chapter 10: Rotation Change in Syllabus: Only Chapter 10 problems (CH10: 04, 27, 67) are due on Thursday, Oct. 14. The Chapter 11 problems (Ch11: 06, 37, 50) will be due on Thursday, Oct. 21 in addition
Chapter 10: Rotation Change in Syllabus: Only Chapter 10 problems (CH10: 04, 27, 67) are due on Thursday, Oct. 14. The Chapter 11 problems (Ch11: 06, 37, 50) will be due on Thursday, Oct. 21 in addition
Thursday Simulation & Unity
 Rigid Bodies Simulation Homework Build a particle system based either on F=ma or procedural simulation Examples: Smoke, Fire, Water, Wind, Leaves, Cloth, Magnets, Flocks, Fish, Insects, Crowds, etc. Simulate
Rigid Bodies Simulation Homework Build a particle system based either on F=ma or procedural simulation Examples: Smoke, Fire, Water, Wind, Leaves, Cloth, Magnets, Flocks, Fish, Insects, Crowds, etc. Simulate
Lagrange s Equations of Motion and the Generalized Inertia
 Lagrange s Equations of Motion and the Generalized Inertia The Generalized Inertia Consider the kinetic energy for a n degree of freedom mechanical system with coordinates q, q 2,... q n. If the system
Lagrange s Equations of Motion and the Generalized Inertia The Generalized Inertia Consider the kinetic energy for a n degree of freedom mechanical system with coordinates q, q 2,... q n. If the system
The Principle of Least Action
 The Principle of Least Action Anders Svensson Abstract In this paper, the principle of least action in classical mechanics is studied. The term is used in several different contexts, mainly for Hamilton
The Principle of Least Action Anders Svensson Abstract In this paper, the principle of least action in classical mechanics is studied. The term is used in several different contexts, mainly for Hamilton
Physics 121. March 18, Physics 121. March 18, Course Announcements. Course Information. Topics to be discussed today:
 Physics 121. March 18, 2008. Physics 121. March 18, 2008. Course Information Topics to be discussed today: Variables used to describe rotational motion The equations of motion for rotational motion Course
Physics 121. March 18, 2008. Physics 121. March 18, 2008. Course Information Topics to be discussed today: Variables used to describe rotational motion The equations of motion for rotational motion Course
Physics 4A Solutions to Chapter 10 Homework
 Physics 4A Solutions to Chapter 0 Homework Chapter 0 Questions: 4, 6, 8 Exercises & Problems 6, 3, 6, 4, 45, 5, 5, 7, 8 Answers to Questions: Q 0-4 (a) positive (b) zero (c) negative (d) negative Q 0-6
Physics 4A Solutions to Chapter 0 Homework Chapter 0 Questions: 4, 6, 8 Exercises & Problems 6, 3, 6, 4, 45, 5, 5, 7, 8 Answers to Questions: Q 0-4 (a) positive (b) zero (c) negative (d) negative Q 0-6
General Physics I. Lecture 8: Rotation of a Rigid Object About a Fixed Axis. Prof. WAN, Xin ( 万歆 )
") General Physics I Lecture 8: Rotation of a Rigid Object About a Fixed Axis Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ New Territory Object In the past, point particle (no rotation,
General Physics I Lecture 8: Rotation of a Rigid Object About a Fixed Axis Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ New Territory Object In the past, point particle (no rotation,
Physics 2A Chapter 10 - Rotational Motion Fall 2018
 Physics A Chapter 10 - Rotational Motion Fall 018 These notes are five pages. A quick summary: The concepts of rotational motion are a direct mirror image of the same concepts in linear motion. Follow
Physics A Chapter 10 - Rotational Motion Fall 018 These notes are five pages. A quick summary: The concepts of rotational motion are a direct mirror image of the same concepts in linear motion. Follow
Rigid body simulation. Once we consider an object with spatial extent, particle system simulation is no longer sufficient
 Rigid body dynamics Rigid body simulation Once we consider an object with spatial extent, particle system simulation is no longer sufficient Rigid body simulation Unconstrained system no contact Constrained
Rigid body dynamics Rigid body simulation Once we consider an object with spatial extent, particle system simulation is no longer sufficient Rigid body simulation Unconstrained system no contact Constrained
Video 3.1 Vijay Kumar and Ani Hsieh
 Video 3.1 Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Dynamics of Robot Arms Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Lagrange s Equation of Motion Lagrangian Kinetic Energy Potential
Video 3.1 Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Dynamics of Robot Arms Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Lagrange s Equation of Motion Lagrangian Kinetic Energy Potential
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik. Robot Dynamics. Dr.-Ing. John Nassour J.
 Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Dynamics. Dynamics of mechanical particle and particle systems (many body systems)
") Dynamics Dynamics of mechanical particle and particle systems (many body systems) Newton`s first law: If no net force acts on a body, it will move on a straight line at constant velocity or will stay at
Dynamics Dynamics of mechanical particle and particle systems (many body systems) Newton`s first law: If no net force acts on a body, it will move on a straight line at constant velocity or will stay at
particle p = m v F ext = d P = M d v cm dt
 Lecture 11: Momentum and Collisions; Introduction to Rotation 1 REVIEW: (Chapter 8) LINEAR MOMENTUM and COLLISIONS The first new physical quantity introduced in Chapter 8 is Linear Momentum Linear Momentum
Lecture 11: Momentum and Collisions; Introduction to Rotation 1 REVIEW: (Chapter 8) LINEAR MOMENTUM and COLLISIONS The first new physical quantity introduced in Chapter 8 is Linear Momentum Linear Momentum
Computer Animation. Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics. Slides courtesy of Leonard McMillan and Jovan Popovic
 Computer Animation Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Slides courtesy of Leonard McMillan and Jovan Popovic Lecture 13 6.837 Fall 2002 Office hours Administrative
Computer Animation Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Slides courtesy of Leonard McMillan and Jovan Popovic Lecture 13 6.837 Fall 2002 Office hours Administrative
Advanced Dynamics. - Lecture 4 Lagrange Equations. Paolo Tiso Spring Semester 2017 ETH Zürich
 Advanced Dynamics - Lecture 4 Lagrange Equations Paolo Tiso Spring Semester 2017 ETH Zürich LECTURE OBJECTIVES 1. Derive the Lagrange equations of a system of particles; 2. Show that the equation of motion
Advanced Dynamics - Lecture 4 Lagrange Equations Paolo Tiso Spring Semester 2017 ETH Zürich LECTURE OBJECTIVES 1. Derive the Lagrange equations of a system of particles; 2. Show that the equation of motion
Dynamics of Rotational Motion
 Chapter 10 Dynamics of Rotational Motion To understand the concept of torque. To relate angular acceleration and torque. To work and power in rotational motion. To understand angular momentum. To understand
Chapter 10 Dynamics of Rotational Motion To understand the concept of torque. To relate angular acceleration and torque. To work and power in rotational motion. To understand angular momentum. To understand
z F 3 = = = m 1 F 1 m 2 F 2 m 3 - Linear Momentum dp dt F net = d P net = d p 1 dt d p n dt - Conservation of Linear Momentum Δ P = 0
 F 1 m 2 F 2 x m 1 O z F 3 m 3 y Ma com = F net F F F net, x net, y net, z = = = Ma Ma Ma com, x com, y com, z p = mv - Linear Momentum F net = dp dt F net = d P dt = d p 1 dt +...+ d p n dt Δ P = 0 - Conservation
F 1 m 2 F 2 x m 1 O z F 3 m 3 y Ma com = F net F F F net, x net, y net, z = = = Ma Ma Ma com, x com, y com, z p = mv - Linear Momentum F net = dp dt F net = d P dt = d p 1 dt +...+ d p n dt Δ P = 0 - Conservation
The Jacobian. Jesse van den Kieboom
 The Jacobian Jesse van den Kieboom jesse.vandenkieboom@epfl.ch 1 Introduction 1 1 Introduction The Jacobian is an important concept in robotics. Although the general concept of the Jacobian in robotics
The Jacobian Jesse van den Kieboom jesse.vandenkieboom@epfl.ch 1 Introduction 1 1 Introduction The Jacobian is an important concept in robotics. Although the general concept of the Jacobian in robotics
DYNAMICS OF SERIAL ROBOTIC MANIPULATORS
 DYNAMICS OF SERIAL ROBOTIC MANIPULATORS NOMENCLATURE AND BASIC DEFINITION We consider here a mechanical system composed of r rigid bodies and denote: M i 6x6 inertia dyads of the ith body. Wi 6 x 6 angular-velocity
DYNAMICS OF SERIAL ROBOTIC MANIPULATORS NOMENCLATURE AND BASIC DEFINITION We consider here a mechanical system composed of r rigid bodies and denote: M i 6x6 inertia dyads of the ith body. Wi 6 x 6 angular-velocity
Analytical Dynamics: Lagrange s Equation and its Application A Brief Introduction
 Analytical Dynamics: Lagrange s Equation and its Application A Brief Introduction D. S. Stutts, Ph.D. Associate Professor of Mechanical Engineering Missouri University of Science and Technology Rolla,
Analytical Dynamics: Lagrange s Equation and its Application A Brief Introduction D. S. Stutts, Ph.D. Associate Professor of Mechanical Engineering Missouri University of Science and Technology Rolla,
Generalized coordinates and constraints
 Generalized coordinates and constraints Basilio Bona DAUIN Politecnico di Torino Semester 1, 2014-15 B. Bona (DAUIN) Generalized coordinates and constraints Semester 1, 2014-15 1 / 25 Coordinates A rigid
Generalized coordinates and constraints Basilio Bona DAUIN Politecnico di Torino Semester 1, 2014-15 B. Bona (DAUIN) Generalized coordinates and constraints Semester 1, 2014-15 1 / 25 Coordinates A rigid
Northwestern CT Community College Course Syllabus. Course Title: CALCULUS-BASED PHYSICS I with Lab Course #: PHY 221
 Northwestern CT Community College Course Syllabus Course Title: CALCULUS-BASED PHYSICS I with Lab Course #: PHY 221 Course Description: 4 credits (3 class hours and 3 laboratory hours per week) Physics
Northwestern CT Community College Course Syllabus Course Title: CALCULUS-BASED PHYSICS I with Lab Course #: PHY 221 Course Description: 4 credits (3 class hours and 3 laboratory hours per week) Physics
DYNAMICS OF PARALLEL MANIPULATOR
 DYNAMICS OF PARALLEL MANIPULATOR The 6nx6n matrices of manipulator mass M and manipulator angular velocity W are introduced below: M = diag M 1, M 2,, M n W = diag (W 1, W 2,, W n ) From this definitions
DYNAMICS OF PARALLEL MANIPULATOR The 6nx6n matrices of manipulator mass M and manipulator angular velocity W are introduced below: M = diag M 1, M 2,, M n W = diag (W 1, W 2,, W n ) From this definitions
CIRCULAR MOTION AND ROTATION
 1. UNIFORM CIRCULAR MOTION So far we have learned a great deal about linear motion. This section addresses rotational motion. The simplest kind of rotational motion is an object moving in a perfect circle
1. UNIFORM CIRCULAR MOTION So far we have learned a great deal about linear motion. This section addresses rotational motion. The simplest kind of rotational motion is an object moving in a perfect circle
Dynamics. Basilio Bona. Semester 1, DAUIN Politecnico di Torino. B. Bona (DAUIN) Dynamics Semester 1, / 18
 Dynamics Semester 1, / 18") Dynamics Basilio Bona DAUIN Politecnico di Torino Semester 1, 2016-17 B. Bona (DAUIN) Dynamics Semester 1, 2016-17 1 / 18 Dynamics Dynamics studies the relations between the 3D space generalized forces
Dynamics Basilio Bona DAUIN Politecnico di Torino Semester 1, 2016-17 B. Bona (DAUIN) Dynamics Semester 1, 2016-17 1 / 18 Dynamics Dynamics studies the relations between the 3D space generalized forces
Constrained motion and generalized coordinates
 Constrained motion and generalized coordinates based on FW-13 Often, the motion of particles is restricted by constraints, and we want to: work only with independent degrees of freedom (coordinates) k
Constrained motion and generalized coordinates based on FW-13 Often, the motion of particles is restricted by constraints, and we want to: work only with independent degrees of freedom (coordinates) k
Physics 141. Lecture 18. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1
 Physics 141. Lecture 18. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1 Physics 141. Lecture 18. Course Information. Topics to be discussed today: A
Physics 141. Lecture 18. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1 Physics 141. Lecture 18. Course Information. Topics to be discussed today: A
Chapter 8 Lecture. Pearson Physics. Rotational Motion and Equilibrium. Prepared by Chris Chiaverina Pearson Education, Inc.
 Chapter 8 Lecture Pearson Physics Rotational Motion and Equilibrium Prepared by Chris Chiaverina Chapter Contents Describing Angular Motion Rolling Motion and the Moment of Inertia Torque Static Equilibrium
Chapter 8 Lecture Pearson Physics Rotational Motion and Equilibrium Prepared by Chris Chiaverina Chapter Contents Describing Angular Motion Rolling Motion and the Moment of Inertia Torque Static Equilibrium
Chapter 11. Angular Momentum
 Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
General Physics I. Lecture 8: Rotation of a Rigid Object About a Fixed Axis. Prof. WAN, Xin ( 万歆 )
") General Physics I Lecture 8: Rotation of a Rigid Object About a Fixed Axis Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ New Territory Object In the past, point particle (no rotation,
General Physics I Lecture 8: Rotation of a Rigid Object About a Fixed Axis Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ New Territory Object In the past, point particle (no rotation,
Dynamics Algorithms for Multibody Systems
 International Conference on Multi Body Dynamics 2011 Vijayawada, India. pp. 351 365 Dynamics Algorithms for Multibody Systems S. V. Shah, S. K. Saha and J. K. Dutt Department of Mechanical Engineering,
International Conference on Multi Body Dynamics 2011 Vijayawada, India. pp. 351 365 Dynamics Algorithms for Multibody Systems S. V. Shah, S. K. Saha and J. K. Dutt Department of Mechanical Engineering,
Chapter 8- Rotational Motion
 Chapter 8- Rotational Motion Assignment 8 Textbook (Giancoli, 6 th edition), Chapter 7-8: Due on Thursday, November 13, 2008 - Problem 28 - page 189 of the textbook - Problem 40 - page 190 of the textbook
Chapter 8- Rotational Motion Assignment 8 Textbook (Giancoli, 6 th edition), Chapter 7-8: Due on Thursday, November 13, 2008 - Problem 28 - page 189 of the textbook - Problem 40 - page 190 of the textbook
Rotation Angular Momentum
 Rotation Angular Momentum Lana Sheridan De Anza College Nov 28, 2017 Last time rolling motion Overview Definition of angular momentum relation to Newton s 2nd law angular impulse angular momentum of rigid
Rotation Angular Momentum Lana Sheridan De Anza College Nov 28, 2017 Last time rolling motion Overview Definition of angular momentum relation to Newton s 2nd law angular impulse angular momentum of rigid
Chapter 10: Rotation
 Chapter 10: Rotation Review of translational motion (motion along a straight line) Position x Displacement x Velocity v = dx/dt Acceleration a = dv/dt Mass m Newton s second law F = ma Work W = Fdcosφ
Chapter 10: Rotation Review of translational motion (motion along a straight line) Position x Displacement x Velocity v = dx/dt Acceleration a = dv/dt Mass m Newton s second law F = ma Work W = Fdcosφ
Northwestern Connecticut Community College Course Syllabus
 Northwestern Connecticut Community College Course Syllabus Course Title: Introductory Physics Course #: PHY 110 Course Description: 4 credits (3 class hours and 3 laboratory hours per week) Physics 110
Northwestern Connecticut Community College Course Syllabus Course Title: Introductory Physics Course #: PHY 110 Course Description: 4 credits (3 class hours and 3 laboratory hours per week) Physics 110
Generalized Coordinates, Lagrangians
 Generalized Coordinates, Lagrangians Sourendu Gupta TIFR, Mumbai, India Classical Mechanics 2012 August 10, 2012 Generalized coordinates Consider again the motion of a simple pendulum. Since it is one
Generalized Coordinates, Lagrangians Sourendu Gupta TIFR, Mumbai, India Classical Mechanics 2012 August 10, 2012 Generalized coordinates Consider again the motion of a simple pendulum. Since it is one
06. Lagrangian Mechanics II
 University of Rhode Island DigitalCommons@URI Classical Dynamics Physics Course Materials 2015 06. Lagrangian Mechanics II Gerhard Müller University of Rhode Island, gmuller@uri.edu Creative Commons License
University of Rhode Island DigitalCommons@URI Classical Dynamics Physics Course Materials 2015 06. Lagrangian Mechanics II Gerhard Müller University of Rhode Island, gmuller@uri.edu Creative Commons License
Physics 121, March 25, Rotational Motion and Angular Momentum. Department of Physics and Astronomy, University of Rochester
 Physics 121, March 25, 2008. Rotational Motion and Angular Momentum. Physics 121. March 25, 2008. Course Information Topics to be discussed today: Review of Rotational Motion Rolling Motion Angular Momentum
Physics 121, March 25, 2008. Rotational Motion and Angular Momentum. Physics 121. March 25, 2008. Course Information Topics to be discussed today: Review of Rotational Motion Rolling Motion Angular Momentum
Lecture Note 12: Dynamics of Open Chains: Lagrangian Formulation
 ECE5463: Introduction to Robotics Lecture Note 12: Dynamics of Open Chains: Lagrangian Formulation Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio,
ECE5463: Introduction to Robotics Lecture Note 12: Dynamics of Open Chains: Lagrangian Formulation Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio,
Angular Momentum. Objectives CONSERVATION OF ANGULAR MOMENTUM
 Angular Momentum CONSERVATION OF ANGULAR MOMENTUM Objectives Calculate the angular momentum vector for a moving particle Calculate the angular momentum vector for a rotating rigid object where angular
Angular Momentum CONSERVATION OF ANGULAR MOMENTUM Objectives Calculate the angular momentum vector for a moving particle Calculate the angular momentum vector for a rotating rigid object where angular
Lecture V: The game-engine loop & Time Integration
 Lecture V: The game-engine loop & Time Integration The Basic Game-Engine Loop Previous state: " #, %(#) ( #, )(#) Forces -(#) Integrate velocities and positions Resolve Interpenetrations Per-body change
Lecture V: The game-engine loop & Time Integration The Basic Game-Engine Loop Previous state: " #, %(#) ( #, )(#) Forces -(#) Integrate velocities and positions Resolve Interpenetrations Per-body change
Central force motion/kepler problem. 1 Reducing 2-body motion to effective 1-body, that too with 2 d.o.f and 1st order differential equations
 Central force motion/kepler problem This short note summarizes our discussion in the lectures of various aspects of the motion under central force, in particular, the Kepler problem of inverse square-law
Central force motion/kepler problem This short note summarizes our discussion in the lectures of various aspects of the motion under central force, in particular, the Kepler problem of inverse square-law
Lagrangian Dynamics: Derivations of Lagrange s Equations
 Constraints and Degrees of Freedom 1.003J/1.053J Dynamics and Control I, Spring 007 Professor Thomas Peacock 4/9/007 Lecture 15 Lagrangian Dynamics: Derivations of Lagrange s Equations Constraints and
Constraints and Degrees of Freedom 1.003J/1.053J Dynamics and Control I, Spring 007 Professor Thomas Peacock 4/9/007 Lecture 15 Lagrangian Dynamics: Derivations of Lagrange s Equations Constraints and
Position and orientation of rigid bodies
 Robotics 1 Position and orientation of rigid bodies Prof. Alessandro De Luca Robotics 1 1 Position and orientation right-handed orthogonal Reference Frames RF A A p AB B RF B rigid body position: A p AB
Robotics 1 Position and orientation of rigid bodies Prof. Alessandro De Luca Robotics 1 1 Position and orientation right-handed orthogonal Reference Frames RF A A p AB B RF B rigid body position: A p AB
CS277 - Experimental Haptics Lecture 13. Six-DOF Haptic Rendering I
 CS277 - Experimental Haptics Lecture 13 Six-DOF Haptic Rendering I Outline Motivation Direct rendering Proxy-based rendering - Theory - Taxonomy Motivation 3-DOF avatar The Holy Grail? Tool-Mediated Interaction
CS277 - Experimental Haptics Lecture 13 Six-DOF Haptic Rendering I Outline Motivation Direct rendering Proxy-based rendering - Theory - Taxonomy Motivation 3-DOF avatar The Holy Grail? Tool-Mediated Interaction
The... of a particle is defined as its change in position in some time interval.
 Distance is the. of a path followed by a particle. Distance is a quantity. The... of a particle is defined as its change in position in some time interval. Displacement is a.. quantity. The... of a particle
Distance is the. of a path followed by a particle. Distance is a quantity. The... of a particle is defined as its change in position in some time interval. Displacement is a.. quantity. The... of a particle
Dynamics. 1 Copyright c 2015 Roderic Grupen
 Dynamics The branch of physics that treats the action of force on bodies in motion or at rest; kinetics, kinematics, and statics, collectively. Websters dictionary Outline Conservation of Momentum Inertia
Dynamics The branch of physics that treats the action of force on bodies in motion or at rest; kinetics, kinematics, and statics, collectively. Websters dictionary Outline Conservation of Momentum Inertia
Deriving 1 DOF Equations of Motion Worked-Out Examples. MCE371: Vibrations. Prof. Richter. Department of Mechanical Engineering. Handout 3 Fall 2017
 MCE371: Vibrations Prof. Richter Department of Mechanical Engineering Handout 3 Fall 2017 Masses with Rectilinear Motion Follow Palm, p.63, 67-72 and Sect.2.6. Refine your skill in drawing correct free
MCE371: Vibrations Prof. Richter Department of Mechanical Engineering Handout 3 Fall 2017 Masses with Rectilinear Motion Follow Palm, p.63, 67-72 and Sect.2.6. Refine your skill in drawing correct free
Lab 9 - Rotational Dynamics
 145 Name Date Partners Lab 9 - Rotational Dynamics OBJECTIVES To study angular motion including angular velocity and angular acceleration. To relate rotational inertia to angular motion. To determine kinetic
145 Name Date Partners Lab 9 - Rotational Dynamics OBJECTIVES To study angular motion including angular velocity and angular acceleration. To relate rotational inertia to angular motion. To determine kinetic
Classical Mechanics. FIG. 1. Figure for (a), (b) and (c). FIG. 2. Figure for (d) and (e).
, (b) and (c). FIG. 2. Figure for (d) and (e).") Classical Mechanics 1. Consider a cylindrically symmetric object with a total mass M and a finite radius R from the axis of symmetry as in the FIG. 1. FIG. 1. Figure for (a), (b) and (c). (a) Show that
Classical Mechanics 1. Consider a cylindrically symmetric object with a total mass M and a finite radius R from the axis of symmetry as in the FIG. 1. FIG. 1. Figure for (a), (b) and (c). (a) Show that
Rolling without slipping Angular Momentum Conservation of Angular Momentum. Physics 201: Lecture 19, Pg 1
 Physics 131: Lecture Today s Agenda Rolling without slipping Angular Momentum Conservation o Angular Momentum Physics 01: Lecture 19, Pg 1 Rolling Without Slipping Rolling is a combination o rotation and
Physics 131: Lecture Today s Agenda Rolling without slipping Angular Momentum Conservation o Angular Momentum Physics 01: Lecture 19, Pg 1 Rolling Without Slipping Rolling is a combination o rotation and
Lecture 38: Equations of Rigid-Body Motion
 Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
Rotation. Kinematics Rigid Bodies Kinetic Energy. Torque Rolling. featuring moments of Inertia
 Rotation Kinematics Rigid Bodies Kinetic Energy featuring moments of Inertia Torque Rolling Angular Motion We think about rotation in the same basic way we do about linear motion How far does it go? How
Rotation Kinematics Rigid Bodies Kinetic Energy featuring moments of Inertia Torque Rolling Angular Motion We think about rotation in the same basic way we do about linear motion How far does it go? How
Chapter 10. Rotation of a Rigid Object about a Fixed Axis
 Chapter 10 Rotation of a Rigid Object about a Fixed Axis Angular Position Axis of rotation is the center of the disc Choose a fixed reference line. Point P is at a fixed distance r from the origin. A small
Chapter 10 Rotation of a Rigid Object about a Fixed Axis Angular Position Axis of rotation is the center of the disc Choose a fixed reference line. Point P is at a fixed distance r from the origin. A small
Chapter 8: Momentum, Impulse, & Collisions. Newton s second law in terms of momentum:
 linear momentum: Chapter 8: Momentum, Impulse, & Collisions Newton s second law in terms of momentum: impulse: Under what SPECIFIC condition is linear momentum conserved? (The answer does not involve collisions.)
linear momentum: Chapter 8: Momentum, Impulse, & Collisions Newton s second law in terms of momentum: impulse: Under what SPECIFIC condition is linear momentum conserved? (The answer does not involve collisions.)
In this section of notes, we look at the calculation of forces and torques for a manipulator in two settings:
 Introduction Up to this point we have considered only the kinematics of a manipulator. That is, only the specification of motion without regard to the forces and torques required to cause motion In this
Introduction Up to this point we have considered only the kinematics of a manipulator. That is, only the specification of motion without regard to the forces and torques required to cause motion In this
DIFFERENTIAL KINEMATICS. Geometric Jacobian. Analytical Jacobian. Kinematic singularities. Kinematic redundancy. Inverse differential kinematics
 DIFFERENTIAL KINEMATICS relationship between joint velocities and end-effector velocities Geometric Jacobian Analytical Jacobian Kinematic singularities Kinematic redundancy Inverse differential kinematics
DIFFERENTIAL KINEMATICS relationship between joint velocities and end-effector velocities Geometric Jacobian Analytical Jacobian Kinematic singularities Kinematic redundancy Inverse differential kinematics
Advanced Robotic Manipulation
 Advanced Robotic Manipulation Handout CS37A (Spring 017 Solution Set # Problem 1 - Redundant robot control The goal of this problem is to familiarize you with the control of a robot that is redundant with
Advanced Robotic Manipulation Handout CS37A (Spring 017 Solution Set # Problem 1 - Redundant robot control The goal of this problem is to familiarize you with the control of a robot that is redundant with
Review of Linear Momentum And Rotational Motion
 Physics 7B-1 (A/B) Professor Cebra Winter 2010 Lecture 7 Review of Linear Momentum And Rotational Motion Slide 1 of 29 Physics 7B Lecture 7 17-Feb-2010 Slide 2 of 29 The Definition of Impulse Recall that
Physics 7B-1 (A/B) Professor Cebra Winter 2010 Lecture 7 Review of Linear Momentum And Rotational Motion Slide 1 of 29 Physics 7B Lecture 7 17-Feb-2010 Slide 2 of 29 The Definition of Impulse Recall that
1/30. Rigid Body Rotations. Dave Frank
 . 1/3 Rigid Body Rotations Dave Frank A Point Particle and Fundamental Quantities z 2/3 m v ω r y x Angular Velocity v = dr dt = ω r Kinetic Energy K = 1 2 mv2 Momentum p = mv Rigid Bodies We treat a rigid
. 1/3 Rigid Body Rotations Dave Frank A Point Particle and Fundamental Quantities z 2/3 m v ω r y x Angular Velocity v = dr dt = ω r Kinetic Energy K = 1 2 mv2 Momentum p = mv Rigid Bodies We treat a rigid
Manipulator Dynamics 2. Instructor: Jacob Rosen Advanced Robotic - MAE 263D - Department of Mechanical & Aerospace Engineering - UCLA
 Manipulator Dynamics 2 Forward Dynamics Problem Given: Joint torques and links geometry, mass, inertia, friction Compute: Angular acceleration of the links (solve differential equations) Solution Dynamic
Manipulator Dynamics 2 Forward Dynamics Problem Given: Joint torques and links geometry, mass, inertia, friction Compute: Angular acceleration of the links (solve differential equations) Solution Dynamic
Kinematic representation! Iterative methods! Optimization methods
 Human Kinematics Kinematic representation! Iterative methods! Optimization methods Kinematics Forward kinematics! given a joint configuration, what is the position of an end point on the structure?! Inverse
Human Kinematics Kinematic representation! Iterative methods! Optimization methods Kinematics Forward kinematics! given a joint configuration, what is the position of an end point on the structure?! Inverse
Dynamic Model of a Badminton Stroke
 ISEA 28 CONFERENCE Dynamic Model of a Badminton Stroke M. Kwan* and J. Rasmussen Department of Mechanical Engineering, Aalborg University, 922 Aalborg East, Denmark Phone: +45 994 9317 / Fax: +45 9815
ISEA 28 CONFERENCE Dynamic Model of a Badminton Stroke M. Kwan* and J. Rasmussen Department of Mechanical Engineering, Aalborg University, 922 Aalborg East, Denmark Phone: +45 994 9317 / Fax: +45 9815
Video 2.1a Vijay Kumar and Ani Hsieh
 Video 2.1a Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Introduction to Lagrangian Mechanics Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Analytical Mechanics Aristotle Galileo Bernoulli
Video 2.1a Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Introduction to Lagrangian Mechanics Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Analytical Mechanics Aristotle Galileo Bernoulli
Rotational Kinetic Energy
 Lecture 17, Chapter 10: Rotational Energy and Angular Momentum 1 Rotational Kinetic Energy Consider a rigid body rotating with an angular velocity ω about an axis. Clearly every point in the rigid body
Lecture 17, Chapter 10: Rotational Energy and Angular Momentum 1 Rotational Kinetic Energy Consider a rigid body rotating with an angular velocity ω about an axis. Clearly every point in the rigid body
We define angular displacement, θ, and angular velocity, ω. What's a radian?
 We define angular displacement, θ, and angular velocity, ω Units: θ = rad ω = rad/s What's a radian? Radian is the ratio between the length of an arc and its radius note: counterclockwise is + clockwise
We define angular displacement, θ, and angular velocity, ω Units: θ = rad ω = rad/s What's a radian? Radian is the ratio between the length of an arc and its radius note: counterclockwise is + clockwise
Chapter 8- Rotational Kinematics Angular Variables Kinematic Equations
 Chapter 8- Rotational Kinematics Angular Variables Kinematic Equations Chapter 9- Rotational Dynamics Torque Center of Gravity Newton s 2 nd Law- Angular Rotational Work & Energy Angular Momentum Angular
Chapter 8- Rotational Kinematics Angular Variables Kinematic Equations Chapter 9- Rotational Dynamics Torque Center of Gravity Newton s 2 nd Law- Angular Rotational Work & Energy Angular Momentum Angular
PSE Game Physics. Session (6) Angular momentum, microcollisions, damping. Oliver Meister, Roland Wittmann
 Angular momentum, microcollisions, damping. Oliver Meister, Roland Wittmann") PSE Game Physics Session (6) Angular momentum, microcollisions, damping Oliver Meister, Roland Wittmann 23.05.2014 Session (6)Angular momentum, microcollisions, damping, 23.05.2014 1 Outline Angular momentum
PSE Game Physics Session (6) Angular momentum, microcollisions, damping Oliver Meister, Roland Wittmann 23.05.2014 Session (6)Angular momentum, microcollisions, damping, 23.05.2014 1 Outline Angular momentum
Get Discount Coupons for your Coaching institute and FREE Study Material at Force System
 Get Discount Coupons for your Coaching institute and FEE Study Material at www.pickmycoaching.com Mechanics Force System When a member of forces simultaneously acting on the body, it is known as force
Get Discount Coupons for your Coaching institute and FEE Study Material at www.pickmycoaching.com Mechanics Force System When a member of forces simultaneously acting on the body, it is known as force
Review of Linear Momentum And Rotational Motion
 Physics 7B-1 (C/D) Professor Cebra (Guest Lecturer) Winter 2010 Lecture 7 Review of Linear Momentum And Rotational Motion Slide 1 of 36 Slides 3-19 were discussed in the 7:30 Lecture Slides 6-27 were discussed
Physics 7B-1 (C/D) Professor Cebra (Guest Lecturer) Winter 2010 Lecture 7 Review of Linear Momentum And Rotational Motion Slide 1 of 36 Slides 3-19 were discussed in the 7:30 Lecture Slides 6-27 were discussed
Lecture PowerPoints. Chapter 8 Physics: Principles with Applications, 6 th edition Giancoli
 Lecture PowerPoints Chapter 8 Physics: Principles with Applications, 6 th edition Giancoli 2005 Pearson Prentice Hall This work is protected by United States copyright laws and is provided solely for the
Lecture PowerPoints Chapter 8 Physics: Principles with Applications, 6 th edition Giancoli 2005 Pearson Prentice Hall This work is protected by United States copyright laws and is provided solely for the
27. Impact Mechanics of Manipulation
 27. Impact Mechanics of Manipulation Matt Mason matt.mason@cs.cmu.edu http://www.cs.cmu.edu/~mason Carnegie Mellon Lecture 27. Mechanics of Manipulation p.1 Lecture 27. Impact Chapter 1 Manipulation 1
27. Impact Mechanics of Manipulation Matt Mason matt.mason@cs.cmu.edu http://www.cs.cmu.edu/~mason Carnegie Mellon Lecture 27. Mechanics of Manipulation p.1 Lecture 27. Impact Chapter 1 Manipulation 1
Lecture-XII. Angular momentum and Fixed axis rotation
 Lecture-XII Angular momentum and Fixed axis rotation Angular Momentum of a System of Particles Consider a collection of N discrete particles. The total angular momentum of the system is The force acting
Lecture-XII Angular momentum and Fixed axis rotation Angular Momentum of a System of Particles Consider a collection of N discrete particles. The total angular momentum of the system is The force acting
Lecture 9 - Rotational Dynamics
 Lecture 9 - Rotational Dynamics A Puzzle... Angular momentum is a 3D vector, and changing its direction produces a torque τ = dl. An important application in our daily lives is that bicycles don t fall
Lecture 9 - Rotational Dynamics A Puzzle... Angular momentum is a 3D vector, and changing its direction produces a torque τ = dl. An important application in our daily lives is that bicycles don t fall
Chapter 9. Rotational Dynamics
 Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Lecture 38: Equations of Rigid-Body Motion
 Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
Worksheet for Exploration 10.1: Constant Angular Velocity Equation
 Worksheet for Exploration 10.1: Constant Angular Velocity Equation By now you have seen the equation: θ = θ 0 + ω 0 *t. Perhaps you have even derived it for yourself. But what does it really mean for the
Worksheet for Exploration 10.1: Constant Angular Velocity Equation By now you have seen the equation: θ = θ 0 + ω 0 *t. Perhaps you have even derived it for yourself. But what does it really mean for the
Chapter 3 Numerical Methods
 Chapter 3 Numerical Methods Part 3 3.4 Differential Algebraic Systems 3.5 Integration of Differential Equations 1 Outline 3.4 Differential Algebraic Systems 3.4.1 Constrained Dynamics 3.4.2 First and Second
Chapter 3 Numerical Methods Part 3 3.4 Differential Algebraic Systems 3.5 Integration of Differential Equations 1 Outline 3.4 Differential Algebraic Systems 3.4.1 Constrained Dynamics 3.4.2 First and Second