Video 3.1 Vijay Kumar and Ani Hsieh
|
|
|
- Scarlett Evans
- 6 years ago
- Views:
Transcription

1 Video 3.1 Vijay Kumar and Ani Hsieh Robo3x-1.3 1
2 Dynamics of Robot Arms Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2

3 Lagrange s Equation of Motion Lagrangian Kinetic Energy Potential Energy 1-DOF n-dof Generalized Coordinates Generalized Forces Robo3x-1.3 3


4 Motion of Systems of Particles Center of Mass a 2 O P i m i r OPi a 1 f i a 3 Newton s 2 nd Law Robo3x-1.3 4
5 Rigid Body as a System of Particles F i P Constraints P i Pj F j r OPi r OPj Holonomic Constraints Constraints on position O Robo3x-1.3 5

6 Holonomic Constraints Given a system with k particles and l holonomic constraints Ø DOF = k l Ø n = k l generalized coordinates Ø Ø are independent Robo3x-1.3 6
")
7 Types of Displacements f i P Actual P i Pj f j Possible r OPi O r OPj Virtual (or Admissible) Robo3x-1.3 7
8 Video 3.2 Vijay Kumar and Ani Hsieh Robo3x-1.3 8

9 Classification of Forces Newtonian Lagrangian Internal vs External Constraint vs Applied Applied Forces: Any forces that are not constraint forces Robo3x-1.3 9
10 D Alembert s Principle The totality of the constraint forces may be disregarded in the dynamics problem for a system of particles Robo3x


11 D Alembert s & Virtual Displacements C i Constraint Surface TC i q TC i Tangent space of C i C i Virtual Displacements satisfy: Eqn of Motion Robo3x

 From")

12 Intuition for D Alembert s (1) From Newton s 2 nd Law Robo3x

13 Intuition for D Alembert s (2) By definition and And, b/c motion is constrained and Robo3x

14 D Alembert s Principle Alternative Form: 1. Tangent component of are the only ones to contribute to the particle s acceleration 2. Normal components of are in equilibrium w/ Robo3x
15 Video 3.3 Vijay Kumar and Ani Hsieh Robo3x

16 Principle of Virtual Work The totality of the constraint forces does no virtual work. Virtual Work By D Alembert s Principle Robo3x



17 Lagrange s EOM for Systems of Particles (1) System w/ k particles, l constraints, n = k-l DOF Virtual Work j th generalized force Robo3x


 Note:")

18 Lagrange s EOM for Systems of Particles (2) Note: 1) 2) Robo3x
 Kinetic Energy")
19 Lagrange s EOM for Systems of Particles (3) Kinetic Energy Robo3x

")


20 Lagrange s EOM for Systems of Particles (4) And if - Potential Energy - Generalized Applied Forces Robo3x



21 Summary - vector in 3D Virtual work - component in the direction of DO virtual work vs. DO NOT Robo3x
22 Video 3.4 Vijay Kumar and Ani Hsieh Robo3x

23 Potential Energy Robo3x


24 Kinetic Energy Kinetic energy of a rigid body consists of two parts Translational Rotational Inertia Tensor Robo3x




25 Inertia Tensor Principal Cross Moments Products of Inertia 3x3 matrix Symmetric matrix Robo3x


26 Let denote the mass density Principal Moments of Inertia Cross Products of Inertia Robo3x
27 Remarks Inertia tensor depends on reference point coordinate frame VS Robo3x
28 Example Compute the inertia tensor of the block with the given dimensions. Assume is constant. Robo3x
29 Video 3.5 Vijay Kumar and Ani Hsieh Robo3x


30 Potential Energy for n-link Robot 1-Link Robot n-link Robot Robo3x

31 Kinetic Energy for n-link Robot (1) 1-Link Robot n-link Robot Robo3x
32 Review of the Jacobian q R $ f(q) R & f: R $ R & J = f q. δf q $ = f. f. q. q $ f & f & q. q $ J ij = f 5 q 6 Robo3x
")
33 Kinetic Energy of n-link Robot (2) Robo3x



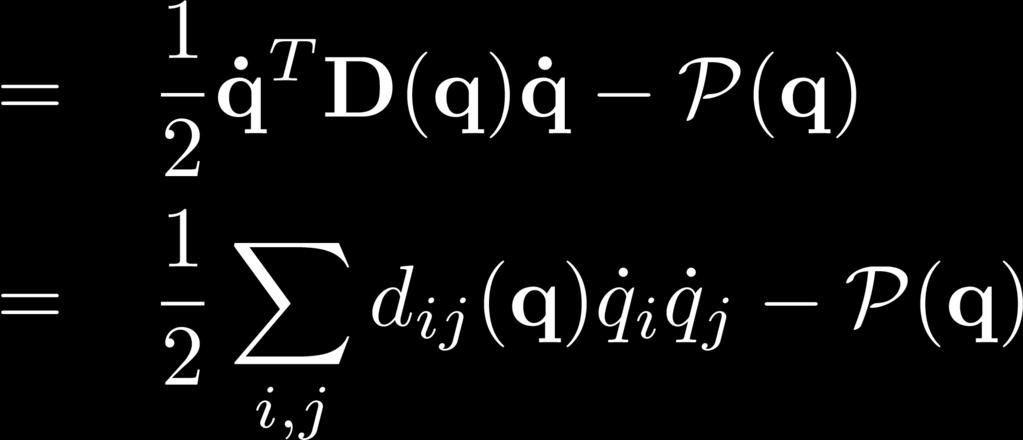
34 Euler-Lagrange EOM for n-link Robot (1) Assumptions: is quadratic function of and independent of Robo3x
35 Euler-Lagrange EOM for n-link Robot (2) Robo3x
 Robo3x-1.")
36 Euler-Lagrange EOM for n-link Robot (3) Robo3x
")

37 Euler-Lagrange EOM for n-link Robot (4) Christoffel Symbols In matrix form Robo3x


38 Skew Symmetry Robo3x

39 Passivity Power = Force x Velocity Energy dissipated over finite time is bounded Important for Controls Robo3x
 -")


40 Bounds on D(q) - eigenvalue of Robo3x
41 Linearity in the Parameters System Parameters: Mass, moments of inertia, lengths, etc. Robo3x
 q 2 q 1 y 0 x 0 Robo3x-1.")
42 2-Link Cartesian Manipulator (1) q 2 q 1 y 0 x 0 Robo3x
43 2-Link Cartesian Manipulator (2) q 2 q 1 y 0 x 0 Robo3x
44 2-Link Cartesian Manipulator (3) q 2 q 1 x 0 y 0 Robo3x
45 2-Link Cartesian Manipulator (4) q 2 q 1 y 0 x 0 Robo3x
46 Video 3.6 Vijay Kumar and Ani Hsieh Robo3x
")




47 2-Link Planar Manipulator (1) System parameters: Link lengths Link center of mass location Link masses y 0 q 2 y 1 P x 1 y 2 Q O q 1 x 0 x 2 Robo3x
48 2-Link Planar Manipulator (2) Recall y 0 q 2 y 1 P x 1 y 2 Q O q 1 x 0 x 2 Robo3x
49 2-Link Planar Manipulator (3) y 1 x 1 y 0 q 2 P y 2 Q O q 1 x 0 x 2 Robo3x
50 2-Link Planar Manipulator (4) Kinetic Energy = Translational + Rotational Translational y 1 x 1 y 0 q 2 P y 2 Q O q 1 x 0 x 2 Robo3x
51 2-Link Planar Manipulator (5) Kinetic Energy = Translational + Rotational Rotational y 1 x 1 y 0 q 2 P y 2 Q O q 1 x 0 x 2 Robo3x
52 2-Link Planar Manipulator (6) Kinetic Energy = Translational + Rotational Rotational y 1 x 1 y 0 q 2 P y 2 Q O q 1 x 0 x 2 Robo3x
53 2-Link Planar Manipulator (7) Kinetic Energy = Translational + Rotational Rotational y 1 x 1 y 0 q 2 P y 2 Q O q 1 x 0 x 2 Robo3x
54 Video 3.7 Vijay Kumar and Ani Hsieh Robo3x
55 2-Link Planar Manipulator (8) Kinetic Energy = Translational + Rotational Rotational y 1 x 1 y 0 q 2 P y 2 Q O q 1 x 0 x 2 Robo3x

56 2-Link Planar Manipulator (6) y 1 x 1 y 0 q 2 P y 2 Q O q 1 x 0 x 2 Robo3x
")

57 2-Link Planar Manipulator (7) Christoffel Symbols Robo3x
58 2-Link Planar Manipulator (8) Potential Energy y 1 x 1 y 0 q 2 P y 2 Q O q 1 x 0 x 2 Robo3x

59 2-Link Planar Manipulator (9) Putting it all together y 1 x 1 1 y 0 q 2 P y 2 Q O q 1 x 0 x 2 Robo3x
60 Newton-Euler vs. Euler-Lagrange Ø N-E: Newton s Laws of Motion Ø N-E: Explicit accounting for constraints Ø N-E: Explicit accounting of the reference frame Ø E-L: D Alembert s Principle + Principle of Virtual Work Ø E-L: Invariant under point transformations Robo3x
61 Summary Lagrangian D Alembert s Principle + Principle of Virtual Work Euler-Lagrange EOM Properties of the E-L EOM Examples: 2 Link Planar Manipulators Robo3x
Video 2.1a Vijay Kumar and Ani Hsieh
 Video 2.1a Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Introduction to Lagrangian Mechanics Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Analytical Mechanics Aristotle Galileo Bernoulli
Video 2.1a Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Introduction to Lagrangian Mechanics Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Analytical Mechanics Aristotle Galileo Bernoulli
Video 1.1 Vijay Kumar and Ani Hsieh
 Video 1.1 Vijay Kumar and Ani Hsieh 1 Robotics: Dynamics and Control Vijay Kumar and Ani Hsieh University of Pennsylvania 2 Why? Robots live in a physical world The physical world is governed by the laws
Video 1.1 Vijay Kumar and Ani Hsieh 1 Robotics: Dynamics and Control Vijay Kumar and Ani Hsieh University of Pennsylvania 2 Why? Robots live in a physical world The physical world is governed by the laws
Physical Dynamics (PHY-304)
") Physical Dynamics (PHY-304) Gabriele Travaglini March 31, 2012 1 Review of Newtonian Mechanics 1.1 One particle Lectures 1-2. Frame, velocity, acceleration, number of degrees of freedom, generalised coordinates.
Physical Dynamics (PHY-304) Gabriele Travaglini March 31, 2012 1 Review of Newtonian Mechanics 1.1 One particle Lectures 1-2. Frame, velocity, acceleration, number of degrees of freedom, generalised coordinates.
Video 6.1 Vijay Kumar and Ani Hsieh
 Video 6.1 Vijay Kumar and Ani Hsieh Robo3x-1.6 1 In General Disturbance Input + - Input Controller + + System Output Robo3x-1.6 2 Learning Objectives for this Week State Space Notation Modeling in the
Video 6.1 Vijay Kumar and Ani Hsieh Robo3x-1.6 1 In General Disturbance Input + - Input Controller + + System Output Robo3x-1.6 2 Learning Objectives for this Week State Space Notation Modeling in the
Dynamics. describe the relationship between the joint actuator torques and the motion of the structure important role for
 Dynamics describe the relationship between the joint actuator torques and the motion of the structure important role for simulation of motion (test control strategies) analysis of manipulator structures
Dynamics describe the relationship between the joint actuator torques and the motion of the structure important role for simulation of motion (test control strategies) analysis of manipulator structures
In most robotic applications the goal is to find a multi-body dynamics description formulated
 Chapter 3 Dynamics Mathematical models of a robot s dynamics provide a description of why things move when forces are generated in and applied on the system. They play an important role for both simulation
Chapter 3 Dynamics Mathematical models of a robot s dynamics provide a description of why things move when forces are generated in and applied on the system. They play an important role for both simulation
Physical Dynamics (SPA5304) Lecture Plan 2018
 Lecture Plan 2018") Physical Dynamics (SPA5304) Lecture Plan 2018 The numbers on the left margin are approximate lecture numbers. Items in gray are not covered this year 1 Advanced Review of Newtonian Mechanics 1.1 One Particle
Physical Dynamics (SPA5304) Lecture Plan 2018 The numbers on the left margin are approximate lecture numbers. Items in gray are not covered this year 1 Advanced Review of Newtonian Mechanics 1.1 One Particle
Structural Dynamics Lecture 4. Outline of Lecture 4. Multi-Degree-of-Freedom Systems. Formulation of Equations of Motions. Undamped Eigenvibrations.
 Outline of Multi-Degree-of-Freedom Systems Formulation of Equations of Motions. Newton s 2 nd Law Applied to Free Masses. D Alembert s Principle. Basic Equations of Motion for Forced Vibrations of Linear
Outline of Multi-Degree-of-Freedom Systems Formulation of Equations of Motions. Newton s 2 nd Law Applied to Free Masses. D Alembert s Principle. Basic Equations of Motion for Forced Vibrations of Linear
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik. Robot Dynamics. Dr.-Ing. John Nassour J.
 Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Advanced Dynamics. - Lecture 4 Lagrange Equations. Paolo Tiso Spring Semester 2017 ETH Zürich
 Advanced Dynamics - Lecture 4 Lagrange Equations Paolo Tiso Spring Semester 2017 ETH Zürich LECTURE OBJECTIVES 1. Derive the Lagrange equations of a system of particles; 2. Show that the equation of motion
Advanced Dynamics - Lecture 4 Lagrange Equations Paolo Tiso Spring Semester 2017 ETH Zürich LECTURE OBJECTIVES 1. Derive the Lagrange equations of a system of particles; 2. Show that the equation of motion
REVIEW. Hamilton s principle. based on FW-18. Variational statement of mechanics: (for conservative forces) action Equivalent to Newton s laws!
 action Equivalent to Newton s laws!") Hamilton s principle Variational statement of mechanics: (for conservative forces) action Equivalent to Newton s laws! based on FW-18 REVIEW the particle takes the path that minimizes the integrated difference
Hamilton s principle Variational statement of mechanics: (for conservative forces) action Equivalent to Newton s laws! based on FW-18 REVIEW the particle takes the path that minimizes the integrated difference
Manipulator Dynamics 2. Instructor: Jacob Rosen Advanced Robotic - MAE 263D - Department of Mechanical & Aerospace Engineering - UCLA
 Manipulator Dynamics 2 Forward Dynamics Problem Given: Joint torques and links geometry, mass, inertia, friction Compute: Angular acceleration of the links (solve differential equations) Solution Dynamic
Manipulator Dynamics 2 Forward Dynamics Problem Given: Joint torques and links geometry, mass, inertia, friction Compute: Angular acceleration of the links (solve differential equations) Solution Dynamic
ANALYTICAL MECHANICS. LOUIS N. HAND and JANET D. FINCH CAMBRIDGE UNIVERSITY PRESS
 ANALYTICAL MECHANICS LOUIS N. HAND and JANET D. FINCH CAMBRIDGE UNIVERSITY PRESS Preface xi 1 LAGRANGIAN MECHANICS l 1.1 Example and Review of Newton's Mechanics: A Block Sliding on an Inclined Plane 1
ANALYTICAL MECHANICS LOUIS N. HAND and JANET D. FINCH CAMBRIDGE UNIVERSITY PRESS Preface xi 1 LAGRANGIAN MECHANICS l 1.1 Example and Review of Newton's Mechanics: A Block Sliding on an Inclined Plane 1
Introduction MEAM 535. What is MEAM 535? Audience. Advanced topics in dynamics
 What is MEAM 535? Advanced topics in dynamics Audience Review of Newtonian mechanics MEAM 535 Introduction Analytical mechanics: Lagrangian and Hamiltonian Special topics: Stability of dynamical systems,
What is MEAM 535? Advanced topics in dynamics Audience Review of Newtonian mechanics MEAM 535 Introduction Analytical mechanics: Lagrangian and Hamiltonian Special topics: Stability of dynamical systems,
41514 Dynamics of Machinery
 41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar Ferreira Santos 1. Recapitulation Mathematical Modeling & Steps 2. Example System of Particle 3. Example
41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar Ferreira Santos 1. Recapitulation Mathematical Modeling & Steps 2. Example System of Particle 3. Example
FINAL EXAM GROUND RULES
 PHYSICS 507 Fall 2011 FINAL EXAM Room: ARC-108 Time: Wednesday, December 21, 10am-1pm GROUND RULES There are four problems based on the above-listed material. Closed book Closed notes Partial credit will
PHYSICS 507 Fall 2011 FINAL EXAM Room: ARC-108 Time: Wednesday, December 21, 10am-1pm GROUND RULES There are four problems based on the above-listed material. Closed book Closed notes Partial credit will
Chapter 3 Numerical Methods
 Chapter 3 Numerical Methods Part 3 3.4 Differential Algebraic Systems 3.5 Integration of Differential Equations 1 Outline 3.4 Differential Algebraic Systems 3.4.1 Constrained Dynamics 3.4.2 First and Second
Chapter 3 Numerical Methods Part 3 3.4 Differential Algebraic Systems 3.5 Integration of Differential Equations 1 Outline 3.4 Differential Algebraic Systems 3.4.1 Constrained Dynamics 3.4.2 First and Second
Lecture Note 12: Dynamics of Open Chains: Lagrangian Formulation
 ECE5463: Introduction to Robotics Lecture Note 12: Dynamics of Open Chains: Lagrangian Formulation Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio,
ECE5463: Introduction to Robotics Lecture Note 12: Dynamics of Open Chains: Lagrangian Formulation Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio,
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
In this section of notes, we look at the calculation of forces and torques for a manipulator in two settings:
 Introduction Up to this point we have considered only the kinematics of a manipulator. That is, only the specification of motion without regard to the forces and torques required to cause motion In this
Introduction Up to this point we have considered only the kinematics of a manipulator. That is, only the specification of motion without regard to the forces and torques required to cause motion In this
Multibody simulation
 Multibody simulation Dynamics of a multibody system (Euler-Lagrange formulation) Dimitar Dimitrov Örebro University June 16, 2012 Main points covered Euler-Lagrange formulation manipulator inertia matrix
Multibody simulation Dynamics of a multibody system (Euler-Lagrange formulation) Dimitar Dimitrov Örebro University June 16, 2012 Main points covered Euler-Lagrange formulation manipulator inertia matrix
Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202)
") J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
Constrained motion and generalized coordinates
 Constrained motion and generalized coordinates based on FW-13 Often, the motion of particles is restricted by constraints, and we want to: work only with independent degrees of freedom (coordinates) k
Constrained motion and generalized coordinates based on FW-13 Often, the motion of particles is restricted by constraints, and we want to: work only with independent degrees of freedom (coordinates) k
DYNAMICS OF SERIAL ROBOTIC MANIPULATORS
 DYNAMICS OF SERIAL ROBOTIC MANIPULATORS NOMENCLATURE AND BASIC DEFINITION We consider here a mechanical system composed of r rigid bodies and denote: M i 6x6 inertia dyads of the ith body. Wi 6 x 6 angular-velocity
DYNAMICS OF SERIAL ROBOTIC MANIPULATORS NOMENCLATURE AND BASIC DEFINITION We consider here a mechanical system composed of r rigid bodies and denote: M i 6x6 inertia dyads of the ith body. Wi 6 x 6 angular-velocity
B.Sc. (Semester - 5) Subject: Physics Course: US05CPHY01 Classical Mechanics
 Subject: Physics Course: US05CPHY01 Classical Mechanics") 1 B.Sc. (Semester - 5) Subject: Physics Course: US05CPHY01 Classical Mechanics Question Bank UNIT: I Multiple choice questions: (1) The gravitational force between two masses is (a) Repulsive (b) Attractive
1 B.Sc. (Semester - 5) Subject: Physics Course: US05CPHY01 Classical Mechanics Question Bank UNIT: I Multiple choice questions: (1) The gravitational force between two masses is (a) Repulsive (b) Attractive
INDEX 363. Cartesian coordinates 19,20,42, 67, 83 Cartesian tensors 84, 87, 226
 INDEX 363 A Absolute differentiation 120 Absolute scalar field 43 Absolute tensor 45,46,47,48 Acceleration 121, 190, 192 Action integral 198 Addition of systems 6, 51 Addition of tensors 6, 51 Adherence
INDEX 363 A Absolute differentiation 120 Absolute scalar field 43 Absolute tensor 45,46,47,48 Acceleration 121, 190, 192 Action integral 198 Addition of systems 6, 51 Addition of tensors 6, 51 Adherence
Differential Kinematics
 Differential Kinematics Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space (e.g., Cartesian space) Instantaneous velocity mappings can be obtained through
Differential Kinematics Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space (e.g., Cartesian space) Instantaneous velocity mappings can be obtained through
Euler-Lagrange's equations in several variables
 Euler-Lagrange's equations in several variables So far we have studied one variable and its derivative Let us now consider L2:1 More:1 Taylor: 226-227 (This proof is slightly more general than Taylor's.)
Euler-Lagrange's equations in several variables So far we have studied one variable and its derivative Let us now consider L2:1 More:1 Taylor: 226-227 (This proof is slightly more general than Taylor's.)
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 11, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Noise makes little good; good
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 11, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Noise makes little good; good
. D CR Nomenclature D 1
 . D CR Nomenclature D 1 Appendix D: CR NOMENCLATURE D 2 The notation used by different investigators working in CR formulations has not coalesced, since the topic is in flux. This Appendix identifies the
. D CR Nomenclature D 1 Appendix D: CR NOMENCLATURE D 2 The notation used by different investigators working in CR formulations has not coalesced, since the topic is in flux. This Appendix identifies the
Physics 106a, Caltech 4 December, Lecture 18: Examples on Rigid Body Dynamics. Rotating rectangle. Heavy symmetric top
 Physics 106a, Caltech 4 December, 2018 Lecture 18: Examples on Rigid Body Dynamics I go through a number of examples illustrating the methods of solving rigid body dynamics. In most cases, the problem
Physics 106a, Caltech 4 December, 2018 Lecture 18: Examples on Rigid Body Dynamics I go through a number of examples illustrating the methods of solving rigid body dynamics. In most cases, the problem
Fundamental principles
 Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Approach based on Cartesian coordinates
 GraSMech course 2005-2006 Computer-aided analysis of rigid and flexible multibody systems Approach based on Cartesian coordinates Prof. O. Verlinden Faculté polytechnique de Mons Olivier.Verlinden@fpms.ac.be
GraSMech course 2005-2006 Computer-aided analysis of rigid and flexible multibody systems Approach based on Cartesian coordinates Prof. O. Verlinden Faculté polytechnique de Mons Olivier.Verlinden@fpms.ac.be
Inverse differential kinematics Statics and force transformations
 Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
Contents. Dynamics and control of mechanical systems. Focus on
 Dynamics and control of mechanical systems Date Day 1 (01/08) Day 2 (03/08) Day 3 (05/08) Day 4 (07/08) Day 5 (09/08) Day 6 (11/08) Content Review of the basics of mechanics. Kinematics of rigid bodies
Dynamics and control of mechanical systems Date Day 1 (01/08) Day 2 (03/08) Day 3 (05/08) Day 4 (07/08) Day 5 (09/08) Day 6 (11/08) Content Review of the basics of mechanics. Kinematics of rigid bodies
Robot Dynamics II: Trajectories & Motion
 Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
AN INTRODUCTION TO LAGRANGE EQUATIONS. Professor J. Kim Vandiver October 28, 2016
 AN INTRODUCTION TO LAGRANGE EQUATIONS Professor J. Kim Vandiver October 28, 2016 kimv@mit.edu 1.0 INTRODUCTION This paper is intended as a minimal introduction to the application of Lagrange equations
AN INTRODUCTION TO LAGRANGE EQUATIONS Professor J. Kim Vandiver October 28, 2016 kimv@mit.edu 1.0 INTRODUCTION This paper is intended as a minimal introduction to the application of Lagrange equations
112 Dynamics. Example 5-3
 112 Dynamics Gravity Joint 1 Figure 6-7: Remotely driven two d.o.r. planar manipulator. Note that, since no external force acts on the endpoint, the generalized forces coincide with the joint torques,
112 Dynamics Gravity Joint 1 Figure 6-7: Remotely driven two d.o.r. planar manipulator. Note that, since no external force acts on the endpoint, the generalized forces coincide with the joint torques,
Dynamics. Basilio Bona. Semester 1, DAUIN Politecnico di Torino. B. Bona (DAUIN) Dynamics Semester 1, / 18
 Dynamics Semester 1, / 18") Dynamics Basilio Bona DAUIN Politecnico di Torino Semester 1, 2016-17 B. Bona (DAUIN) Dynamics Semester 1, 2016-17 1 / 18 Dynamics Dynamics studies the relations between the 3D space generalized forces
Dynamics Basilio Bona DAUIN Politecnico di Torino Semester 1, 2016-17 B. Bona (DAUIN) Dynamics Semester 1, 2016-17 1 / 18 Dynamics Dynamics studies the relations between the 3D space generalized forces
Chapter 4 Statics and dynamics of rigid bodies
 Chapter 4 Statics and dynamics of rigid bodies Bachelor Program in AUTOMATION ENGINEERING Prof. Rong-yong Zhao (zhaorongyong@tongji.edu.cn) First Semester,2014-2015 Content of chapter 4 4.1 Static equilibrium
Chapter 4 Statics and dynamics of rigid bodies Bachelor Program in AUTOMATION ENGINEERING Prof. Rong-yong Zhao (zhaorongyong@tongji.edu.cn) First Semester,2014-2015 Content of chapter 4 4.1 Static equilibrium
Torque and Rotation Lecture 7
 Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Dynamics and control of mechanical systems
 Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
D Alembert s principle of virtual work
 PH101 Lecture 9 Review of Lagrange s equations from D Alembert s Principle, Examples of Generalized Forces a way to deal with friction, and other non-conservative forces D Alembert s principle of virtual
PH101 Lecture 9 Review of Lagrange s equations from D Alembert s Principle, Examples of Generalized Forces a way to deal with friction, and other non-conservative forces D Alembert s principle of virtual
Classical Mechanics and Electrodynamics
 Classical Mechanics and Electrodynamics Lecture notes FYS 3120 Jon Magne Leinaas Department of Physics, University of Oslo 2 Preface FYS 3120 is a course in classical theoretical physics, which covers
Classical Mechanics and Electrodynamics Lecture notes FYS 3120 Jon Magne Leinaas Department of Physics, University of Oslo 2 Preface FYS 3120 is a course in classical theoretical physics, which covers
Nonholonomic Constraints Examples
 Nonholonomic Constraints Examples Basilio Bona DAUIN Politecnico di Torino July 2009 B. Bona (DAUIN) Examples July 2009 1 / 34 Example 1 Given q T = [ x y ] T check that the constraint φ(q) = (2x + siny
Nonholonomic Constraints Examples Basilio Bona DAUIN Politecnico di Torino July 2009 B. Bona (DAUIN) Examples July 2009 1 / 34 Example 1 Given q T = [ x y ] T check that the constraint φ(q) = (2x + siny
STATICS Chapter 1 Introductory Concepts
 Contents Preface to Adapted Edition... (v) Preface to Third Edition... (vii) List of Symbols and Abbreviations... (xi) PART - I STATICS Chapter 1 Introductory Concepts 1-1 Scope of Mechanics... 1 1-2 Preview
Contents Preface to Adapted Edition... (v) Preface to Third Edition... (vii) List of Symbols and Abbreviations... (xi) PART - I STATICS Chapter 1 Introductory Concepts 1-1 Scope of Mechanics... 1 1-2 Preview
Classical Mechanics and Electrodynamics
 Classical Mechanics and Electrodynamics Lecture notes FYS 3120 Jon Magne Leinaas Department of Physics, University of Oslo December 2009 2 Preface These notes are prepared for the physics course FYS 3120,
Classical Mechanics and Electrodynamics Lecture notes FYS 3120 Jon Magne Leinaas Department of Physics, University of Oslo December 2009 2 Preface These notes are prepared for the physics course FYS 3120,
Lecture 37: Principal Axes, Translations, and Eulerian Angles
 Lecture 37: Principal Axes, Translations, and Eulerian Angles When Can We Find Principal Axes? We can always write down the cubic equation that one must solve to determine the principal moments But if
Lecture 37: Principal Axes, Translations, and Eulerian Angles When Can We Find Principal Axes? We can always write down the cubic equation that one must solve to determine the principal moments But if
PHYS 705: Classical Mechanics. Euler s Equations
 1 PHYS 705: Classical Mechanics Euler s Equations 2 Euler s Equations (set up) We have seen how to describe the kinematic properties of a rigid body. Now, we would like to get equations of motion for it.
1 PHYS 705: Classical Mechanics Euler s Equations 2 Euler s Equations (set up) We have seen how to describe the kinematic properties of a rigid body. Now, we would like to get equations of motion for it.
Rigid bodies - general theory
 Rigid bodies - general theory Kinetic Energy: based on FW-26 Consider a system on N particles with all their relative separations fixed: it has 3 translational and 3 rotational degrees of freedom. Motion
Rigid bodies - general theory Kinetic Energy: based on FW-26 Consider a system on N particles with all their relative separations fixed: it has 3 translational and 3 rotational degrees of freedom. Motion
Chapter 5. . Dynamics. 5.1 Introduction
 Chapter 5. Dynamics 5.1 Introduction The study of manipulator dynamics is essential for both the analysis of performance and the design of robot control. A manipulator is a multilink, highly nonlinear
Chapter 5. Dynamics 5.1 Introduction The study of manipulator dynamics is essential for both the analysis of performance and the design of robot control. A manipulator is a multilink, highly nonlinear
Case Study: The Pelican Prototype Robot
 5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
Analytical Dynamics: Lagrange s Equation and its Application A Brief Introduction
 Analytical Dynamics: Lagrange s Equation and its Application A Brief Introduction D. S. Stutts, Ph.D. Associate Professor of Mechanical Engineering Missouri University of Science and Technology Rolla,
Analytical Dynamics: Lagrange s Equation and its Application A Brief Introduction D. S. Stutts, Ph.D. Associate Professor of Mechanical Engineering Missouri University of Science and Technology Rolla,
General Theoretical Concepts Related to Multibody Dynamics
 General Theoretical Concepts Related to Multibody Dynamics Before Getting Started Material draws on two main sources Ed Haug s book, available online: http://sbel.wisc.edu/courses/me751/2010/bookhaugpointers.htm
General Theoretical Concepts Related to Multibody Dynamics Before Getting Started Material draws on two main sources Ed Haug s book, available online: http://sbel.wisc.edu/courses/me751/2010/bookhaugpointers.htm
Control of Robotic Manipulators
 Control of Robotic Manipulators Set Point Control Technique 1: Joint PD Control Joint torque Joint position error Joint velocity error Why 0? Equivalent to adding a virtual spring and damper to the joints
Control of Robotic Manipulators Set Point Control Technique 1: Joint PD Control Joint torque Joint position error Joint velocity error Why 0? Equivalent to adding a virtual spring and damper to the joints
Generalized Coordinates, Lagrangians
 Generalized Coordinates, Lagrangians Sourendu Gupta TIFR, Mumbai, India Classical Mechanics 2012 August 10, 2012 Generalized coordinates Consider again the motion of a simple pendulum. Since it is one
Generalized Coordinates, Lagrangians Sourendu Gupta TIFR, Mumbai, India Classical Mechanics 2012 August 10, 2012 Generalized coordinates Consider again the motion of a simple pendulum. Since it is one
Multibody simulation
 Multibody simulation Dynamics of a multibody system (Newton-Euler formulation) Dimitar Dimitrov Örebro University June 8, 2012 Main points covered Newton-Euler formulation forward dynamics inverse dynamics
Multibody simulation Dynamics of a multibody system (Newton-Euler formulation) Dimitar Dimitrov Örebro University June 8, 2012 Main points covered Newton-Euler formulation forward dynamics inverse dynamics
q 1 F m d p q 2 Figure 1: An automated crane with the relevant kinematic and dynamic definitions.
 Robotics II March 7, 018 Exercise 1 An automated crane can be seen as a mechanical system with two degrees of freedom that moves along a horizontal rail subject to the actuation force F, and that transports
Robotics II March 7, 018 Exercise 1 An automated crane can be seen as a mechanical system with two degrees of freedom that moves along a horizontal rail subject to the actuation force F, and that transports
Problem Goldstein 2-12
 Problem Goldstein -1 The Rolling Constraint: A small circular hoop of radius r and mass m hoop rolls without slipping on a stationary cylinder of radius R. The only external force is that of gravity. Let
Problem Goldstein -1 The Rolling Constraint: A small circular hoop of radius r and mass m hoop rolls without slipping on a stationary cylinder of radius R. The only external force is that of gravity. Let
Generalized coordinates and constraints
 Generalized coordinates and constraints Basilio Bona DAUIN Politecnico di Torino Semester 1, 2014-15 B. Bona (DAUIN) Generalized coordinates and constraints Semester 1, 2014-15 1 / 25 Coordinates A rigid
Generalized coordinates and constraints Basilio Bona DAUIN Politecnico di Torino Semester 1, 2014-15 B. Bona (DAUIN) Generalized coordinates and constraints Semester 1, 2014-15 1 / 25 Coordinates A rigid
Tensor Analysis in Euclidean Space
 Tensor Analysis in Euclidean Space James Emery Edited: 8/5/2016 Contents 1 Classical Tensor Notation 2 2 Multilinear Functionals 4 3 Operations With Tensors 5 4 The Directional Derivative 5 5 Curvilinear
Tensor Analysis in Euclidean Space James Emery Edited: 8/5/2016 Contents 1 Classical Tensor Notation 2 2 Multilinear Functionals 4 3 Operations With Tensors 5 4 The Directional Derivative 5 5 Curvilinear
Exercise 1b: Differential Kinematics of the ABB IRB 120
 Exercise 1b: Differential Kinematics of the ABB IRB 120 Marco Hutter, Michael Blösch, Dario Bellicoso, Samuel Bachmann October 5, 2016 Abstract The aim of this exercise is to calculate the differential
Exercise 1b: Differential Kinematics of the ABB IRB 120 Marco Hutter, Michael Blösch, Dario Bellicoso, Samuel Bachmann October 5, 2016 Abstract The aim of this exercise is to calculate the differential
Advanced Vibrations. Elements of Analytical Dynamics. By: H. Ahmadian Lecture One
 Advanced Vibrations Lecture One Elements of Analytical Dynamics By: H. Ahmadian ahmadian@iust.ac.ir Elements of Analytical Dynamics Newton's laws were formulated for a single particle Can be extended to
Advanced Vibrations Lecture One Elements of Analytical Dynamics By: H. Ahmadian ahmadian@iust.ac.ir Elements of Analytical Dynamics Newton's laws were formulated for a single particle Can be extended to
Introduction to Robotics
 J. Zhang, L. Einig 277 / 307 MIN Faculty Department of Informatics Lecture 8 Jianwei Zhang, Lasse Einig [zhang, einig]@informatik.uni-hamburg.de University of Hamburg Faculty of Mathematics, Informatics
J. Zhang, L. Einig 277 / 307 MIN Faculty Department of Informatics Lecture 8 Jianwei Zhang, Lasse Einig [zhang, einig]@informatik.uni-hamburg.de University of Hamburg Faculty of Mathematics, Informatics
202 Index. failure, 26 field equation, 122 force, 1
 Index acceleration, 12, 161 admissible function, 155 admissible stress, 32 Airy's stress function, 122, 124 d'alembert's principle, 165, 167, 177 amplitude, 171 analogy, 76 anisotropic material, 20 aperiodic
Index acceleration, 12, 161 admissible function, 155 admissible stress, 32 Airy's stress function, 122, 124 d'alembert's principle, 165, 167, 177 amplitude, 171 analogy, 76 anisotropic material, 20 aperiodic
Part of the advantage : Constraint forces do no virtual. work under a set of virtual displacements compatible
 FORCES OF CONSTRAINT Lagrangian formalism : Generalized coordinate Minimum set of Eqns Part of the advantage : Constraint forces do no virtual work under a set of virtual displacements compatible with
FORCES OF CONSTRAINT Lagrangian formalism : Generalized coordinate Minimum set of Eqns Part of the advantage : Constraint forces do no virtual work under a set of virtual displacements compatible with
Vectors in Three Dimensions and Transformations
 Vectors in Three Dimensions and Transformations University of Pennsylvania 1 Scalar and Vector Functions φ(q 1, q 2,...,q n ) is a scalar function of n variables φ(q 1, q 2,...,q n ) is independent of
Vectors in Three Dimensions and Transformations University of Pennsylvania 1 Scalar and Vector Functions φ(q 1, q 2,...,q n ) is a scalar function of n variables φ(q 1, q 2,...,q n ) is independent of
06. Lagrangian Mechanics II
 University of Rhode Island DigitalCommons@URI Classical Dynamics Physics Course Materials 2015 06. Lagrangian Mechanics II Gerhard Müller University of Rhode Island, gmuller@uri.edu Creative Commons License
University of Rhode Island DigitalCommons@URI Classical Dynamics Physics Course Materials 2015 06. Lagrangian Mechanics II Gerhard Müller University of Rhode Island, gmuller@uri.edu Creative Commons License
Advanced mechanics. Physics 302
 Advanced mechanics Physics 302 Instructor: Dr. Alexey Belyanin http://faculty.physics.tamu.edu/belyanin/ Office: MIST 426 Office Phone: (979) 845-7785 Email: belyanin@tamu.edu Office Hours: any time when
Advanced mechanics Physics 302 Instructor: Dr. Alexey Belyanin http://faculty.physics.tamu.edu/belyanin/ Office: MIST 426 Office Phone: (979) 845-7785 Email: belyanin@tamu.edu Office Hours: any time when
AB-267 DYNAMICS & CONTROL OF FLEXIBLE AIRCRAFT
 FLÁIO SILESTRE DYNAMICS & CONTROL OF FLEXIBLE AIRCRAFT LECTURE NOTES LAGRANGIAN MECHANICS APPLIED TO RIGID-BODY DYNAMICS IMAGE CREDITS: BOEING FLÁIO SILESTRE Introduction Lagrangian Mechanics shall be
FLÁIO SILESTRE DYNAMICS & CONTROL OF FLEXIBLE AIRCRAFT LECTURE NOTES LAGRANGIAN MECHANICS APPLIED TO RIGID-BODY DYNAMICS IMAGE CREDITS: BOEING FLÁIO SILESTRE Introduction Lagrangian Mechanics shall be
inertia of a body, principal axes of inertia, invariants of an inertia tensor, and inertia triangle inequalities are illustrated and discussed.
 Preface This book belongs to a series of three books written simultaneously (the remaining two are titled Classical Mechanics: Dynamics and Classical Mechanics: Applied MechanicsandMechatronics). This
Preface This book belongs to a series of three books written simultaneously (the remaining two are titled Classical Mechanics: Dynamics and Classical Mechanics: Applied MechanicsandMechatronics). This
Choice of Riemannian Metrics for Rigid Body Kinematics
 Choice of Riemannian Metrics for Rigid Body Kinematics Miloš Žefran1, Vijay Kumar 1 and Christopher Croke 2 1 General Robotics and Active Sensory Perception (GRASP) Laboratory 2 Department of Mathematics
Choice of Riemannian Metrics for Rigid Body Kinematics Miloš Žefran1, Vijay Kumar 1 and Christopher Croke 2 1 General Robotics and Active Sensory Perception (GRASP) Laboratory 2 Department of Mathematics
ME101: Engineering Mechanics ( )
") ME101: Engineering Mechanics (3 1 0 8) 2016-2017 (II Semester); Division IV Budhaditya Hazra Room N-307 Department of Civil Engineering budhaditya.hazra@iitg.ernet.in Phone: 258 3334/5334 Web: www.iitg.ernet.in/budhaditya.hazra
ME101: Engineering Mechanics (3 1 0 8) 2016-2017 (II Semester); Division IV Budhaditya Hazra Room N-307 Department of Civil Engineering budhaditya.hazra@iitg.ernet.in Phone: 258 3334/5334 Web: www.iitg.ernet.in/budhaditya.hazra
4.1 Introduction Issues of applied dynamics CHAPTER 4. DYNAMICS 191
 Chapter 4 Dynamics Dynamics is the branch of mechanics that is concerned with the study of motion and the relation between the forces and motion. The central focus of our study is the dynamics of systems
Chapter 4 Dynamics Dynamics is the branch of mechanics that is concerned with the study of motion and the relation between the forces and motion. The central focus of our study is the dynamics of systems
Review for Final. elementary mechanics. Lagrangian and Hamiltonian Dynamics. oscillations
 Review for Final elementary mechanics Newtonian mechanics gravitation dynamics of systems of particles Lagrangian and Hamiltonian Dynamics Lagrangian mechanics Variational dynamics Hamiltonian dynamics
Review for Final elementary mechanics Newtonian mechanics gravitation dynamics of systems of particles Lagrangian and Hamiltonian Dynamics Lagrangian mechanics Variational dynamics Hamiltonian dynamics
Elastic Multibody Dynamics
 H. Bremer Elastic Multibody Dynamics A Direct Ritz Approach Springer TABLE OF CONTENTS 1. INTRODUCTION 1 1.1 Background 1 1.2 Contents 5 2. AXIOMS AND PRINCIPLES 7 2.1 Axioms 7 2.2 Principles - the "Differential"
H. Bremer Elastic Multibody Dynamics A Direct Ritz Approach Springer TABLE OF CONTENTS 1. INTRODUCTION 1 1.1 Background 1 1.2 Contents 5 2. AXIOMS AND PRINCIPLES 7 2.1 Axioms 7 2.2 Principles - the "Differential"
Structural Dynamics A Graduate Course in Aerospace Engineering
 Structural Dynamics A Graduate Course in Aerospace Engineering By: H. Ahmadian ahmadian@iust.ac.ir The Science and Art of Structural Dynamics What do all the followings have in common? > A sport-utility
Structural Dynamics A Graduate Course in Aerospace Engineering By: H. Ahmadian ahmadian@iust.ac.ir The Science and Art of Structural Dynamics What do all the followings have in common? > A sport-utility
Free Vibration of Single-Degree-of-Freedom (SDOF) Systems
 Systems") Free Vibration of Single-Degree-of-Freedom (SDOF) Systems Procedure in solving structural dynamics problems 1. Abstraction/modeling Idealize the actual structure to a simplified version, depending on the
Free Vibration of Single-Degree-of-Freedom (SDOF) Systems Procedure in solving structural dynamics problems 1. Abstraction/modeling Idealize the actual structure to a simplified version, depending on the
LAGRANGIAN AND HAMILTONIAN
 LAGRANGIAN AND HAMILTONIAN A. Constraints and Degrees of Freedom. A constraint is a restriction on the freedom of motion of a system of particles in the form of a condition. The number of independent ways
LAGRANGIAN AND HAMILTONIAN A. Constraints and Degrees of Freedom. A constraint is a restriction on the freedom of motion of a system of particles in the form of a condition. The number of independent ways
3-D Kinetics of Rigid Bodies
 3-D Kinetics of Rigid Bodies Angular Momentum Generalized Newton s second law for the motion for a 3-D mass system Moment eqn for 3-D motion will be different than that obtained for plane motion Consider
3-D Kinetics of Rigid Bodies Angular Momentum Generalized Newton s second law for the motion for a 3-D mass system Moment eqn for 3-D motion will be different than that obtained for plane motion Consider
COMPLETE ALL ROUGH WORKINGS IN THE ANSWER BOOK AND CROSS THROUGH ANY WORK WHICH IS NOT TO BE ASSESSED.
 BSc/MSci EXAMINATION PHY-304 Time Allowed: Physical Dynamics 2 hours 30 minutes Date: 28 th May 2009 Time: 10:00 Instructions: Answer ALL questions in section A. Answer ONLY TWO questions from section
BSc/MSci EXAMINATION PHY-304 Time Allowed: Physical Dynamics 2 hours 30 minutes Date: 28 th May 2009 Time: 10:00 Instructions: Answer ALL questions in section A. Answer ONLY TWO questions from section
Video 8.1 Vijay Kumar. Property of University of Pennsylvania, Vijay Kumar
 Video 8.1 Vijay Kumar 1 Definitions State State equations Equilibrium 2 Stability Stable Unstable Neutrally (Critically) Stable 3 Stability Translate the origin to x e x(t) =0 is stable (Lyapunov stable)
Video 8.1 Vijay Kumar 1 Definitions State State equations Equilibrium 2 Stability Stable Unstable Neutrally (Critically) Stable 3 Stability Translate the origin to x e x(t) =0 is stable (Lyapunov stable)
Lecture 41: Highlights
 Lecture 41: Highlights The goal of this lecture is to remind you of some of the key points that we ve covered this semester Note that this is not the complete set of topics that may appear on the final
Lecture 41: Highlights The goal of this lecture is to remind you of some of the key points that we ve covered this semester Note that this is not the complete set of topics that may appear on the final
MSMS Basilio Bona DAUIN PoliTo
 MSMS 214-215 Basilio Bona DAUIN PoliTo Problem 2 The planar system illustrated in Figure 1 consists of a bar B and a wheel W moving (no friction, no sliding) along the bar; the bar can rotate around an
MSMS 214-215 Basilio Bona DAUIN PoliTo Problem 2 The planar system illustrated in Figure 1 consists of a bar B and a wheel W moving (no friction, no sliding) along the bar; the bar can rotate around an
Translational and Rotational Dynamics!
 Translational and Rotational Dynamics Robert Stengel Robotics and Intelligent Systems MAE 345, Princeton University, 217 Copyright 217 by Robert Stengel. All rights reserved. For educational use only.
Translational and Rotational Dynamics Robert Stengel Robotics and Intelligent Systems MAE 345, Princeton University, 217 Copyright 217 by Robert Stengel. All rights reserved. For educational use only.
Physics 5153 Classical Mechanics. Canonical Transformations-1
 1 Introduction Physics 5153 Classical Mechanics Canonical Transformations The choice of generalized coordinates used to describe a physical system is completely arbitrary, but the Lagrangian is invariant
1 Introduction Physics 5153 Classical Mechanics Canonical Transformations The choice of generalized coordinates used to describe a physical system is completely arbitrary, but the Lagrangian is invariant
Final Exam Solution Dynamics :45 12:15. Problem 1 Bateau
 Final Exam Solution Dynamics 2 191157140 31-01-2013 8:45 12:15 Problem 1 Bateau Bateau is a trapeze act by Cirque du Soleil in which artists perform aerial maneuvers on a boat shaped structure. The boat
Final Exam Solution Dynamics 2 191157140 31-01-2013 8:45 12:15 Problem 1 Bateau Bateau is a trapeze act by Cirque du Soleil in which artists perform aerial maneuvers on a boat shaped structure. The boat
Solving high order nonholonomic systems using Gibbs-Appell method
 Solving high order nonholonomic systems using Gibbs-Appell method Mohsen Emami, Hassan Zohoor and Saeed Sohrabpour Abstract. In this paper we present a new formulation, based on Gibbs- Appell method, for
Solving high order nonholonomic systems using Gibbs-Appell method Mohsen Emami, Hassan Zohoor and Saeed Sohrabpour Abstract. In this paper we present a new formulation, based on Gibbs- Appell method, for
PHYSICS 110A : CLASSICAL MECHANICS
 PHYSICS 110A : CLASSICAL MECHANICS 1. Introduction to Dynamics motion of a mechanical system equations of motion : Newton s second law ordinary differential equations (ODEs) dynamical systems simple 2.
PHYSICS 110A : CLASSICAL MECHANICS 1. Introduction to Dynamics motion of a mechanical system equations of motion : Newton s second law ordinary differential equations (ODEs) dynamical systems simple 2.
Analytical Mechanics for Relativity and Quantum Mechanics
 Analytical Mechanics for Relativity and Quantum Mechanics Oliver Davis Johns San Francisco State University OXPORD UNIVERSITY PRESS CONTENTS Dedication Preface Acknowledgments v vii ix PART I INTRODUCTION:
Analytical Mechanics for Relativity and Quantum Mechanics Oliver Davis Johns San Francisco State University OXPORD UNIVERSITY PRESS CONTENTS Dedication Preface Acknowledgments v vii ix PART I INTRODUCTION:
Manipulator Dynamics (1) Read Chapter 6
 Read Chapter 6") Manipulator Dynamics (1) Read Capter 6 Wat is dynamics? Study te force (torque) required to cause te motion of robots just like engine power required to drive a automobile Most familiar formula: f = ma
Manipulator Dynamics (1) Read Capter 6 Wat is dynamics? Study te force (torque) required to cause te motion of robots just like engine power required to drive a automobile Most familiar formula: f = ma
Dynamics and control of mechanical systems
 Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
September 21, :43pm Holm Vol 2 WSPC/Book Trim Size for 9in by 6in
 1 GALILEO Contents 1.1 Principle of Galilean relativity 2 1.2 Galilean transformations 3 1.2.1 Admissible force laws for an N-particle system 6 1.3 Subgroups of the Galilean transformations 8 1.3.1 Matrix
1 GALILEO Contents 1.1 Principle of Galilean relativity 2 1.2 Galilean transformations 3 1.2.1 Admissible force laws for an N-particle system 6 1.3 Subgroups of the Galilean transformations 8 1.3.1 Matrix
Dynamics. Dynamics of mechanical particle and particle systems (many body systems)
") Dynamics Dynamics of mechanical particle and particle systems (many body systems) Newton`s first law: If no net force acts on a body, it will move on a straight line at constant velocity or will stay at
Dynamics Dynamics of mechanical particle and particle systems (many body systems) Newton`s first law: If no net force acts on a body, it will move on a straight line at constant velocity or will stay at
4.1 Important Notes on Notation
 Chapter 4. Lagrangian Dynamics (Most of the material presented in this chapter is taken from Thornton and Marion, Chap. 7) 4.1 Important Notes on Notation In this chapter, unless otherwise stated, the
Chapter 4. Lagrangian Dynamics (Most of the material presented in this chapter is taken from Thornton and Marion, Chap. 7) 4.1 Important Notes on Notation In this chapter, unless otherwise stated, the
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics Inverse Dynamics Equilibrium Analysis Various Odd Ends March 18, 2010 Dan Negrut, 2010 ME751, UW-Madison Action speaks louder than words but not nearly as
ME751 Advanced Computational Multibody Dynamics Inverse Dynamics Equilibrium Analysis Various Odd Ends March 18, 2010 Dan Negrut, 2010 ME751, UW-Madison Action speaks louder than words but not nearly as
1 Hamiltonian formalism
 1 Hamiltonian formalism 1.1 Hamilton s principle of stationary action A dynamical system with a finite number n degrees of freedom can be described by real functions of time q i (t) (i =1, 2,..., n) which,
1 Hamiltonian formalism 1.1 Hamilton s principle of stationary action A dynamical system with a finite number n degrees of freedom can be described by real functions of time q i (t) (i =1, 2,..., n) which,
Lecture 9: Eigenvalues and Eigenvectors in Classical Mechanics (See Section 3.12 in Boas)
") Lecture 9: Eigenvalues and Eigenvectors in Classical Mechanics (See Section 3 in Boas) As suggested in Lecture 8 the formalism of eigenvalues/eigenvectors has many applications in physics, especially in
Lecture 9: Eigenvalues and Eigenvectors in Classical Mechanics (See Section 3 in Boas) As suggested in Lecture 8 the formalism of eigenvalues/eigenvectors has many applications in physics, especially in
Physics 6010, Fall 2016 Constraints and Lagrange Multipliers. Relevant Sections in Text:
 Physics 6010, Fall 2016 Constraints and Lagrange Multipliers. Relevant Sections in Text: 1.3 1.6 Constraints Often times we consider dynamical systems which are defined using some kind of restrictions
Physics 6010, Fall 2016 Constraints and Lagrange Multipliers. Relevant Sections in Text: 1.3 1.6 Constraints Often times we consider dynamical systems which are defined using some kind of restrictions
Generalized Forces. Hamilton Principle. Lagrange s Equations
 Chapter 5 Virtual Work and Lagrangian Dynamics Overview: Virtual work can be used to derive the dynamic and static equations without considering the constraint forces as was done in the Newtonian Mechanics,
Chapter 5 Virtual Work and Lagrangian Dynamics Overview: Virtual work can be used to derive the dynamic and static equations without considering the constraint forces as was done in the Newtonian Mechanics,