STATISTICAL ORBIT DETERMINATION
|
|
|
- Emil Hampton
- 6 years ago
- Views:
Transcription
1 STATISTICAL ORBIT DETERMINATION Satellite Tracking Example of SNC and DMC ASEN 5070 LECTURE
2 We will develop a simple state noise compensation (SNC) algorithm. This algorithm adds process noise to the acceleration equations of the system. Process-noise is added to the differential equation of motion given by Eq. (4..1), i.e., t F, t Bt t where u is white Gaussian process noise with where ij is the kronicker delta. X X u (1) T t 0, ti t j u Qti ij u u () The matrix, B, maps the process noise into the state derivatives.
3 Expanding Eq. (1) in a Taylor series about a reference trajectory, X * t, yields t t F X X X X X u X * * * t t t t B t t (3) define * t t t and At x X X F X X t t * (4) Thus the state deviation propagation equation including process noise for a linear system is given by (see Eq. (4.9.1)) t t t t t x x u (5) 3
4 We will further assume that process noise is only being added to the acceleration components of the state; hence, x y z u X 3x3 x, u u, Y x (6) 3x3 u Z y z The time update for the estimation error covariance matrix is given by Eq. (4.9.44). t k1,,, ( ) ( ), t t t t t B QB t d (7) k1 k1 k k k1 k k1 k1 t k 4
5 In this case is a constant given by Eq. (6) and t r r tk tk r tk tk 1 1 tk 1, r 1 r 1 r r r is given by, k1. (8) Each element of is a 3x3 matrix, so for simplicity define. (9) 1 t k 1, 3 4 Then 1 t k 1, (10) 5
6 One could substitute values of and 4 into Eq. (7) and carry out the integration as a quadrature. Alternatively one can approximate the values of and 4 and carry out the integration analytically. We will do the latter. From Eq. (8) we see that X t X t X t X Y Z r t Y t Y t Y t k1 k1 k1 k 1 k 1 k 1 k 1 r X Y Z Z t Z t Z t X Y Z k1 k1 k1. (11) 6
7 Because we are generally dealing with dense tracking data, the time between observations is usually 10 seconds or less. Therefore, we can assume that X () is constant over this interval X t by and approximate and k 1 X t X t (1) k1 k1 X t X k1 t k1. (13) 7
8 X t will be negligibly affected by Z. The same arguments apply to Yt and, hence Here we have assumed that for t k1 small, k 1 k 1 Z tk 1 Y and Also, tk k 1 0. (14) 0 0 tk 1 4 tk 1, r tk1 r. (15) Again the off diagonal terms are small and the diagonal terms are Aproximately=1. We assume that the velocity is constant over the interval so (, ) 1 4 t k 1 8
9 Substituting Eqs. (14) and (16) into Eq. (7) and assuming that Q is given by Define Q 0 0 X 0 Y Z k1 t t t (18) k (17) 9
10 then the process noise contribution to the estimation error covariance matrix time update at tk 1 is given by t k1 t k, ( ) ( ), t B QB t d k1 k1 3 t t X X 3 3 t t Y Y 3 t t t 0 0 t 0 0 X X t t 0 Y Y t t 3 Z z Z Z. (19) 10
11 Eq. (19) represents the contribution to the estimation error covariance matrix from uncertainty in the accelerations acting on the system. The values chosen for, and should X Y Z correspond to the magnitude of the uncertainty of the acceleration acting on the system. For example, if we were trying to compensate for atmospheric drag uncertainty this would primarily be along track. In the RTN frame one might assume that R N 0 and T corresponds to the uncertainty in the drag acceleration. A transformation to the X,Y,Z frame, which is generally ECI, would be made at each observation time so that (see Eq. ( )) Q ECI T QRTN (0) where is the transformation matrix from ECI to RTN (see Eq. (4.16.)). Note that Q ECI is not diagonal nor is it constant and Eq. (19) must be reevaluated with the proper value of Q ECI at each observation time. 11
12 The J 3 Example An ephemeris was generated for a satellite in an orbit similar to that of the Quikscat spacecraft (sun sync, 800 km, circular orbit). The propagator used in the ephemeris generation used a gravitational potential that included J and J 3 as well as atmospheric drag. Observations of range and range rate from three tracking spacecraft in Geostationary orbit were generated for a five hour data arc. Using the simulated observations containing Gaussian noise in a Kalman Filter, the position and velocity were estimated for the satellite and compared with the true values. 1
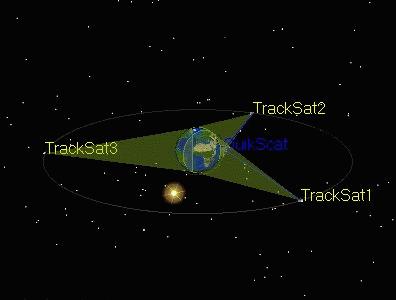
13 Tracking Configuration 13
14 The J 3 Problem Gravitational Potential Function for the J 3 Model U r 1 J R r 3sin 1 J 3 R r 3 5sin 3 3sin where sin 1 z r r x y z 14
15 J 3 Equations of Motion Taking the partials of the Gravitational Potential to get x,y,z accelerations 3 3 U x 3 Re z 5 Re z z x 1 J J x r r r r r r 3 3 U y 3 Re z 5 Re z z y 1 J J y r r r r r r 3 3 U z 3 Re z 3 Re z 35 z r z 1 J J z r r r r r 3 r z 15
16 Conventional Kalman Filter (CKF) y hxˆ y hx 16
17 Conventional Kalman Filter (CKF) RSS=4.18 m/s Velocity RSS = x 10 - m/s Position RSS = m RSS errors are based on X T (X * + ) at each stage ˆx 17
18 Extended Kalman Filter (EKF) No State Noise Added EKF implemented after 154 minutes y Hxˆ y Hx Note that pre-fit residuals for the CKF are much larger that the EKF but post-fit residuals are identical indicating that the reference trajectory for the CKF is in the linear range 18
19 Extended Kalman Filter (EKF) Velocity RSS = 4.33 x 10 - m/s Position RSS = m RSS position and velocity errors for CKF and EKF are nearly identical 19
20 Band Diagonal State Noise Matrix 3 t t X X 3 3 t t Y Y 3 t t T Q 3 t 0 0 t 0 0 X X t t 0 Y Y t t 3 Z Z Z Z See web page handouts or previous slides for derivation 0
21 Conventional Kalman Filter with SNC Band Diagonal State Noise Matrix results for optimum value: = y Hxˆ y hx y hx 1
22 Conventional Kalman Filter with SNC Band Diagonal State Noise Matrix results for optimum value: = Velocity RSS = 1.6 x 10 - m/s Position RSS = 8.43 m
23 Conventional Kalman Filter with SNC Band Diagonal State Noise Matrix results for optimum value: = Kalman gain is so large that data is fit almost perfectly well below noise levels of 1cm and 1mm/s This is what happens if an input error inject a huge amount of process noise i.e. = instead of
24 Conventional Kalman Filter with input error Band Diagonal State Noise Matrix results for optimum value: = standard deviations of estimation error covariance are red lines Velocity RSS = 1. x 10 - m/s Position RSS = m Small residuals do not a good orbit Make RSS errors are larger than Previous results 4
25 Extended Kalman Filter with State Noise (SNC) Band Diagonal State Noise Matrix 3 t t X X 3 3 t t Y Y 3 t t T Q 3 t 0 0 t 0 0 X X t t 0 Y Y t t 3 Z Z Z Z 5
26 Extended Kalman Filter with State Noise (SNC) Band Diagonal State Noise Matrix Looked for optimum values of by analyzing residuals and errors Optimum value to minimize position errors: =
27 Extended Kalman Filter with State Noise (SNC) Band Diagonal State Noise Matrix results for optimum value: = y Hxˆ y Hx y ( recall that x 0) 7
28 Extended Kalman Filter with State Noise (SNC) Band Diagonal State Noise Matrix results for optimum value: = Velocity RSS = x 10 - m/s Position RSS = 8.50 m Position RSS = 8.50 m The CKF and EKF results are Nearly identical indicating that Initial conditions are in the linear range 8
29 Extended Kalman Filter with Fading Adds a fading term to the time update this downweights earlier data by Keeping the Kalman gain elevated P i s(t i,t i1 )P i1 T (t i,t i1 ) where t s e >1 t = time between measurements = 0 seconds = age-weighting time constant 9
30 Extended Kalman Filter with Fading Looked for optimum value of s to minimize the residuals and errors Optimum value of s ~ This corresponds to a of 10 minutes 30
31 Extended Kalman Filter with Fading Optimum values of s to minimize position and velocity errors : s = y Hxˆ x y 31
32 Extended Kalman Filter with Fading Optimum values of s to minimize position and velocity errors : s = Velocity RSS = x 10 - m/s Position RSS = m Position RSS=8.688 m 3
33 Kalman Filter Results Comparison Conventional Kalman Extended Kalman Filter State Noise Matrix State Noise Matri Fading N/A N/A N/A Ra nge Residual (m) Ra nge Rate Residua l (m) E E E-03 X Position Erro r (m) Y Position Erro r (m) Z Position Erro r (m) Position RSS (m) X Velocity Error (m/s) 1.41E E E-0 5.7E E-03 Y Velocity Error (m/s) 3.0E E E E E-03 Z Velocity Error (m/s).66e-0 1.1E-0.58E E-0 1.1E-0 Velocity RSS (m/s) 4.394E-0 1.6E E E E-0 Conclusions: The CKF and EKF produce comparable results indicating that the reference orbit for the CKF is in the linear range for this example. Fading produces comparable results to SNC 33
34 Dynamic Model Compensation (DMC) DMC accounts for unmodeled or inaccurately modeled accelerations acting on the spacecraft - J 3 in this problem. The state vector was augmented to the following: X x, y, z, x, y, z, x, y, z where x, y, and z are the accelerations A Gauss-Markov process is used to account for these accelerations: ( t) ( t) u( t) where u(t) is white Gaussian noise with E(u) 0 Eu(t)u() (t ) and 1 Where is a time constant 34
35 Dynamic Model Compensation and were optimized to give the lowest position and velocity errors: 10 orbital period =
36 Dynamic Model Compensation Optimized Results Velocity RSS = 1.49 x 10 - m/s Position RSS = m 36

37 Dynamic Model Compensation Optimized Results Actual vs estimated accelerations Errors in acceleration estimates in x,y, And z directions Note: the DMC did a poor job of recovering accelerations. More work is needed on optimizing and.we should do a better job of recovering accelerations and the state while reducing tracking residuals. 37
38 Filter Comparisons Conventional Kalman Extended Kalman Filter DMC State Noise Matrix State Noise Matri Fading N/A N/A N/A Ra nge Residual (m) Ra nge Rate Residual (m) E E E E-03 X Position Error (m) Y Position Error (m) Z Position Error (m) Position RSS (m) X Velocity Error (m/s) 1.41E E E-0 5.7E E E-03 Y Velocity Error (m/s) 3.0E E E E E E-03 Z Velocity Error (m/s).66e-0 1.1E-0.58E E-0 1.1E E-0 Velocity RSS (m/s) 4.394E-0 1.6E E E E E-0 All filters achieved comparable results; however we should do better with the DMC 38
39 Added deviations to the initial conditions so that they are outside linear range to show Convergence for EKF with SNC Divergence for CKF with SNC Original Initial Conditions [ , , , , , ] m and m/s Deviation [8, 5, 5, 8, 5, 5] m and m/s Perturbed Initial Conditions [ , , , , , ] m and m/s 39
40 Conventional Kalman Filter Band Diagonal State Noise Matrix results for optimum value: = Deviated Initial Conditions y hxˆ y Hx y hx 40
41 Conventional Kalman Filter Band Diagonal State Noise Matrix results for optimum value: = Deviated Initial Conditions Velocity RSS =.88 m/s Position RSS = m 41
42 Extended Kalman Filter Band Diagonal State Noise Matrix results for optimum value: = Deviated Initial Conditions y Hxˆ y Hx y 4
43 Extended Kalman Filter Band Diagonal State Noise Matrix results for optimum value: = Deviated Initial Conditions Velocity RSS =.53 x 10 - m/s Position RSS = m 43
44 Filter Comparisons CKF EKF Initial Co nditions Linear R ange Nonlinear R ange Linear R ange Nonlinear R ange Ra nge Residual (m) Ra nge Rate Residual (m) 6.64E E E E-0 X Position Erro r (m) Y Position Erro r (m) Z Position Erro r (m) Position RSS (m) X Velocity Error (m/s) 6.19E E E E-03 Y Velocity Error (m/s) 8.89E E E-0 Z Velocity Error (m/s) 1.1E E E-0 3D Velocity RSS (m/s) 1.6E E-0.58E-0 While the CKF does not diverge, its solution is significantly In error 44
45 Added deviations to the initial conditions to show Convergence for EKF with SNC Divergence for the Batch Processor Original Initial Conditions [ , , , , , ] m, m/s Deviation [1000, 1000, 1000, 500, 500, 500] m,m/s Perturbed Initial Conditions [ , , , , , ] m, m/s 45
46 Batch Processor Pass 1 Range RMS = km Range rate RMS = km/s Pass 3 Range RMS = km Range rate RMS = km/s Note that the batch processor is not converging and successive Iterations show divergence 46
47 Extended Kalman Filter Band Diagonal State Noise Matrix results for various values of Deviated Initial Conditions Trajectory updated after 30 minutes Note: Values of from 10-5 to 10-0 were tested. However, the residuals and errors were orders of magnitude higher for value of between 10-5 to Therefore, those values are not shown on the plots. Note that the optimal value for is the same as for small initial condition errors. 47
48 Extended Kalman Filter Band Diagonal State Noise Matrix results for = Deviated Initial Conditions Trajectory updated after 30 minutes y Hxˆ y y 48
49 Extended Kalman Filter Band Diagonal State Noise Matrix results for = Deviated Initial Conditions Position Errors after 50 minutes Position Errors Position RSS = m 49
50 Extended Kalman Filter Band Diagonal State Noise Matrix results for = Deviated Initial Conditions Velocity Errors after 50 minutes Velocity Errors Velocity RSS = 1.58 x 10 - m/s Note that position and velocity RSS are comparable to those on slide 40. If IC errors are large it may be Colorado Center Advantageous for Astrodynamics to use the Research EKF to The University Obtain of Colorado ICs for the batch 50
51 Transformation of State and Covariance Matrix to Alternate Frames Sometimes it is desirable to transform the state vector and the estimation error covariance into alternate coordinate systems. It may be of interest to view these quantities in a radial, transverse, and normal (RTN) system. The general transformation between any two coordinate frames (say prime to unprimed) for a position vector is given by r r a, ( ) where is an orthogonal transformation matrix. r is the vector in the unprimed frame, and a is the vector offset of the origin of the two systems. 51
52 Transformation of State and Covariance Matrix to Alternate Frames The velocity transforms according to r rr ( ) Generally will be zero unless we are transforming from a rotating to a nonrotating frame or vice versa; for example, ECEF to ECI. It can be shown that r r, where is the angular velocity of the rotating frame. The transformation we want is ECI to RTN. We assume that the RTN frame is fixed to the osculating orbit at each point in time; hence 0 and r 0 r 0 v v RTN ECI. ( ) 5
53 Transformation of State and Covariance Matrix to Alternate Frames The covariance of the estimation error is transformed as follows: xˆ x xˆ x, RTN ECI where 0 0 rˆ r 0 0 and ˆ ˆ x x v v, ( ) 0 0 I ˆ and r, v, and represent the true values of the position, velocity, and all other quantities in the state vector, respectively. It is assumed that none of the elements of are affected by the coordinate transformation. 53
54 Transformation of State and Covariance Matrix to Alternate Frames The desired covariance is given by P RTN xˆ xxˆ x E x xx x RTN T T E ˆ ˆ. T ECI ( ) The elements of for the ECI to RTN transformation are given by R T N r * u i j k r * r* v* u i j k, r* v* X Y Z u u u i j k N R X Y Z X Y Z (4.16.0) where ur, ut, u N are unit vectors in the RTN frame, i, j, and k are unit vectors in the ECI frame, and r* and v* are the position and velocity vectors of the reference orbit. 54
55 Transformation of State and Covariance Matrix to Alternate Frames Equation (4.16.0) may be written ur X Y Z i u j. (4.16.1) T X Y Z u N X Y Z k Hence, the transformation matrix relating the RTN and ECI frame is X Y Z X Y Z. (4.16.) X Y Z The transformation relating the covariance matrix in two different frames is P P. B B A A B A T 55
56 Transformation of State and Covariance Matrix to Alternate Frames Assume we wish to transform Φ(t i, t j ) from the A frame to the B frame r t i x( ti ) v ti Let Recall that and x( ti ) ( ti, t j ) x( t j ) A A A A B x( t ) x( t ) i B T 0 T 0 A B x( t ) A B i A i A 56
57 Transformation of State and Covariance Matrix to Alternate Frames But Hence, x( ti ) B ti, t j ( t j ) B x A A B B ti, t j A x( t j ) x( ti ) ( ti, t j ) x( t j ) B B B t, t A t, t B i j B B i j A A A A A B where B A A B T 57
Space Surveillance with Star Trackers. Part II: Orbit Estimation
 AAS -3 Space Surveillance with Star Trackers. Part II: Orbit Estimation Ossama Abdelkhalik, Daniele Mortari, and John L. Junkins Texas A&M University, College Station, Texas 7783-3 Abstract The problem
AAS -3 Space Surveillance with Star Trackers. Part II: Orbit Estimation Ossama Abdelkhalik, Daniele Mortari, and John L. Junkins Texas A&M University, College Station, Texas 7783-3 Abstract The problem
Principles of the Global Positioning System Lecture 11
 12.540 Principles of the Global Positioning System Lecture 11 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 Statistical approach to estimation Summary Look at estimation from statistical point
12.540 Principles of the Global Positioning System Lecture 11 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 Statistical approach to estimation Summary Look at estimation from statistical point
RELATIVE NAVIGATION FOR SATELLITES IN CLOSE PROXIMITY USING ANGLES-ONLY OBSERVATIONS
 (Preprint) AAS 12-202 RELATIVE NAVIGATION FOR SATELLITES IN CLOSE PROXIMITY USING ANGLES-ONLY OBSERVATIONS Hemanshu Patel 1, T. Alan Lovell 2, Ryan Russell 3, Andrew Sinclair 4 "Relative navigation using
(Preprint) AAS 12-202 RELATIVE NAVIGATION FOR SATELLITES IN CLOSE PROXIMITY USING ANGLES-ONLY OBSERVATIONS Hemanshu Patel 1, T. Alan Lovell 2, Ryan Russell 3, Andrew Sinclair 4 "Relative navigation using
Nonlinear State Estimation! Particle, Sigma-Points Filters!
 Nonlinear State Estimation! Particle, Sigma-Points Filters! Robert Stengel! Optimal Control and Estimation, MAE 546! Princeton University, 2017!! Particle filter!! Sigma-Points Unscented Kalman ) filter!!
Nonlinear State Estimation! Particle, Sigma-Points Filters! Robert Stengel! Optimal Control and Estimation, MAE 546! Princeton University, 2017!! Particle filter!! Sigma-Points Unscented Kalman ) filter!!
1 Kalman Filter Introduction
 1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
Benefits of a Geosynchronous Orbit (GEO) Observation Point for Orbit Determination
 Observation Point for Orbit Determination") Benefits of a Geosynchronous Orbit (GEO) Observation Point for Orbit Determination Ray Byrne, Michael Griesmeyer, Ron Schmidt, Jeff Shaddix, and Dave Bodette Sandia National Laboratories ABSTRACT Determining
Benefits of a Geosynchronous Orbit (GEO) Observation Point for Orbit Determination Ray Byrne, Michael Griesmeyer, Ron Schmidt, Jeff Shaddix, and Dave Bodette Sandia National Laboratories ABSTRACT Determining
Tampere University of Technology Tampere Finland
 IGNSS 2013 Surfer s Paradise, Queensland, Australia 16-18.7.2013 Estimation of initial state and model parameters for autonomous GNSS orbit prediction Juha Ala-Luhtala, Mari Seppänen, Simo Ali-Löytty,
IGNSS 2013 Surfer s Paradise, Queensland, Australia 16-18.7.2013 Estimation of initial state and model parameters for autonomous GNSS orbit prediction Juha Ala-Luhtala, Mari Seppänen, Simo Ali-Löytty,
Kalman Filter. Predict: Update: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q
 Kalman Filter Kalman Filter Predict: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q Update: K = P k k 1 Hk T (H k P k k 1 Hk T + R) 1 x k k = x k k 1 + K(z k H k x k k 1 ) P k k =(I
Kalman Filter Kalman Filter Predict: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q Update: K = P k k 1 Hk T (H k P k k 1 Hk T + R) 1 x k k = x k k 1 + K(z k H k x k k 1 ) P k k =(I
Principles of the Global Positioning System Lecture 14
 12.540 Principles of the Global Positioning System Lecture 14 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 Propagation Medium Propagation: Signal propagation from satellite to receiver Light-time
12.540 Principles of the Global Positioning System Lecture 14 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 Propagation Medium Propagation: Signal propagation from satellite to receiver Light-time
Spacecraft Orbit Anomaly Representation Using Thrust-Fourier-Coefficients with Orbit Determination Toolbox
 Spacecraft Orbit Anomaly Representation Using Thrust-Fourier-Coefficients with Orbit Determination Toolbox Hyun Chul Ko and Daniel J. Scheeres University of Colorado - Boulder, Boulder, CO, USA ABSTRACT
Spacecraft Orbit Anomaly Representation Using Thrust-Fourier-Coefficients with Orbit Determination Toolbox Hyun Chul Ko and Daniel J. Scheeres University of Colorado - Boulder, Boulder, CO, USA ABSTRACT
COVARIANCE DETERMINATION, PROPAGATION AND INTERPOLATION TECHNIQUES FOR SPACE SURVEILLANCE. European Space Surveillance Conference 7-9 June 2011
 COVARIANCE DETERMINATION, PROPAGATION AND INTERPOLATION TECHNIQUES FOR SPACE SURVEILLANCE European Space Surveillance Conference 7-9 June 2011 Pablo García (1), Diego Escobar (1), Alberto Águeda (1), Francisco
COVARIANCE DETERMINATION, PROPAGATION AND INTERPOLATION TECHNIQUES FOR SPACE SURVEILLANCE European Space Surveillance Conference 7-9 June 2011 Pablo García (1), Diego Escobar (1), Alberto Águeda (1), Francisco
Linked, Autonomous, Interplanetary Satellite Orbit Navigation (LiAISON) Why Do We Need Autonomy?
 Why Do We Need Autonomy?") Linked, Autonomous, Interplanetary Satellite Orbit Navigation (LiAISON) Presentation by Keric Hill For ASEN 5070 Statistical Orbit Determination Fall 2006 1 Why Do We Need Autonomy? New Lunar Missions:
Linked, Autonomous, Interplanetary Satellite Orbit Navigation (LiAISON) Presentation by Keric Hill For ASEN 5070 Statistical Orbit Determination Fall 2006 1 Why Do We Need Autonomy? New Lunar Missions:
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Tactical Ballistic Missile Tracking using the Interacting Multiple Model Algorithm
 Tactical Ballistic Missile Tracking using the Interacting Multiple Model Algorithm Robert L Cooperman Raytheon Co C 3 S Division St Petersburg, FL Robert_L_Cooperman@raytheoncom Abstract The problem of
Tactical Ballistic Missile Tracking using the Interacting Multiple Model Algorithm Robert L Cooperman Raytheon Co C 3 S Division St Petersburg, FL Robert_L_Cooperman@raytheoncom Abstract The problem of
Robot Localization and Kalman Filters
 Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Cubature Particle filter applied in a tightly-coupled GPS/INS navigation system
 Cubature Particle filter applied in a tightly-coupled GPS/INS navigation system Yingwei Zhao & David Becker Physical and Satellite Geodesy Institute of Geodesy TU Darmstadt 1 Yingwei Zhao & David Becker
Cubature Particle filter applied in a tightly-coupled GPS/INS navigation system Yingwei Zhao & David Becker Physical and Satellite Geodesy Institute of Geodesy TU Darmstadt 1 Yingwei Zhao & David Becker
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING
 FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING Elias F. Solorzano University of Toronto (Space Flight Laboratory) Toronto, ON (Canada) August 10 th, 2016 30 th AIAA/USU
FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING Elias F. Solorzano University of Toronto (Space Flight Laboratory) Toronto, ON (Canada) August 10 th, 2016 30 th AIAA/USU
Investigation of CSAC Driven One-Way Ranging Performance for CubeSat Navigation
 SSC18-X-06 Investigation of CSAC Driven One-Way Ranging Performance for CubeSat Navigation Margaret Rybak, Penina Axelrad University of Colorado, Boulder Boulder, Colorado, 80309, USA; 303.570.5002 Margaret.Rybak@colorado.edu,
SSC18-X-06 Investigation of CSAC Driven One-Way Ranging Performance for CubeSat Navigation Margaret Rybak, Penina Axelrad University of Colorado, Boulder Boulder, Colorado, 80309, USA; 303.570.5002 Margaret.Rybak@colorado.edu,
Principles of the Global Positioning System Lecture 18" Mathematical models in GPS" Mathematical models used in GPS"
 12.540 Principles of the Global Positioning System Lecture 18" Prof. Thomas Herring" Room 54-820A; 253-5941" tah@mit.edu" http://geoweb.mit.edu/~tah/12.540 " Mathematical models in GPS" Review assignment
12.540 Principles of the Global Positioning System Lecture 18" Prof. Thomas Herring" Room 54-820A; 253-5941" tah@mit.edu" http://geoweb.mit.edu/~tah/12.540 " Mathematical models in GPS" Review assignment
AM205: Assignment 3 (due 5 PM, October 20)
") AM25: Assignment 3 (due 5 PM, October 2) For this assignment, first complete problems 1, 2, 3, and 4, and then complete either problem 5 (on theory) or problem 6 (on an application). If you submit answers
AM25: Assignment 3 (due 5 PM, October 2) For this assignment, first complete problems 1, 2, 3, and 4, and then complete either problem 5 (on theory) or problem 6 (on an application). If you submit answers
A NONLINEARITY MEASURE FOR ESTIMATION SYSTEMS
 AAS 6-135 A NONLINEARITY MEASURE FOR ESTIMATION SYSTEMS Andrew J. Sinclair,JohnE.Hurtado, and John L. Junkins The concept of nonlinearity measures for dynamical systems is extended to estimation systems,
AAS 6-135 A NONLINEARITY MEASURE FOR ESTIMATION SYSTEMS Andrew J. Sinclair,JohnE.Hurtado, and John L. Junkins The concept of nonlinearity measures for dynamical systems is extended to estimation systems,
Robotics 2 Target Tracking. Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard
 Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Performance of a Dynamic Algorithm For Processing Uncorrelated Tracks
 Performance of a Dynamic Algorithm For Processing Uncorrelated Tracs Kyle T. Alfriend Jong-Il Lim Texas A&M University Tracs of space objects, which do not correlate, to a nown space object are called
Performance of a Dynamic Algorithm For Processing Uncorrelated Tracs Kyle T. Alfriend Jong-Il Lim Texas A&M University Tracs of space objects, which do not correlate, to a nown space object are called
Homework 2; due on Thursday, October 4 PY 502, Computational Physics, Fall 2018
 Homework 2; due on Thursday, October 4 PY 502, Computational Physics, Fall 2018 Department of Physics, Boston University Instructor: Anders Sandvik PERTURBATION OF A GEO-STATIONARY ORBIT Here you will
Homework 2; due on Thursday, October 4 PY 502, Computational Physics, Fall 2018 Department of Physics, Boston University Instructor: Anders Sandvik PERTURBATION OF A GEO-STATIONARY ORBIT Here you will
Nonlinear Filtering. With Polynomial Chaos. Raktim Bhattacharya. Aerospace Engineering, Texas A&M University uq.tamu.edu
 Nonlinear Filtering With Polynomial Chaos Raktim Bhattacharya Aerospace Engineering, Texas A&M University uq.tamu.edu Nonlinear Filtering with PC Problem Setup. Dynamics: ẋ = f(x, ) Sensor Model: ỹ = h(x)
Nonlinear Filtering With Polynomial Chaos Raktim Bhattacharya Aerospace Engineering, Texas A&M University uq.tamu.edu Nonlinear Filtering with PC Problem Setup. Dynamics: ẋ = f(x, ) Sensor Model: ỹ = h(x)
2D Image Processing (Extended) Kalman and particle filter
 Kalman and particle filter") 2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
Accuracy Assessment of SGP4 Orbit Information Conversion into Osculating Elements
 Accuracy Assessment of SGP4 Orbit Information Conversion into Osculating Elements Saika Aida (1), Michael Kirschner (2) (1) DLR German Space Operations Center (GSOC), Oberpfaffenhofen, 82234 Weßling, Germany,
Accuracy Assessment of SGP4 Orbit Information Conversion into Osculating Elements Saika Aida (1), Michael Kirschner (2) (1) DLR German Space Operations Center (GSOC), Oberpfaffenhofen, 82234 Weßling, Germany,
Sequential State Estimation (Crassidas and Junkins, Chapter 5)
") Sequential State Estimation (Crassidas and Junkins, Chapter 5) Please read: 5.1, 5.3-5.6 5.3 The Discrete-Time Kalman Filter The discrete-time Kalman filter is used when the dynamics and measurements are
Sequential State Estimation (Crassidas and Junkins, Chapter 5) Please read: 5.1, 5.3-5.6 5.3 The Discrete-Time Kalman Filter The discrete-time Kalman filter is used when the dynamics and measurements are
Sensor Fusion, 2014 Lecture 1: 1 Lectures
 Sensor Fusion, 2014 Lecture 1: 1 Lectures Lecture Content 1 Course overview. Estimation theory for linear models. 2 Estimation theory for nonlinear models 3 Sensor networks and detection theory 4 Nonlinear
Sensor Fusion, 2014 Lecture 1: 1 Lectures Lecture Content 1 Course overview. Estimation theory for linear models. 2 Estimation theory for nonlinear models 3 Sensor networks and detection theory 4 Nonlinear
Kalman Filters. Derivation of Kalman Filter equations
 Kalman Filters Derivation of Kalman Filter equations Mar Fiala CRV 10 Tutorial Day May 29/2010 Kalman Filters Predict x ˆ + = F xˆ 1 1 1 B u P F + 1 = F P 1 1 T Q Update S H + K ~ y P = H P 1 T T 1 = P
Kalman Filters Derivation of Kalman Filter equations Mar Fiala CRV 10 Tutorial Day May 29/2010 Kalman Filters Predict x ˆ + = F xˆ 1 1 1 B u P F + 1 = F P 1 1 T Q Update S H + K ~ y P = H P 1 T T 1 = P
REAL TIME MULTISATELLITE ORBIT DETERMINATION FOR CONSTELLATION MAINTENANCE
 Proceedings of OBEM 7 opyright 7 by ABM 9th International ongress of Mechanical Engineering November 5-9, 7, Brasília, DF REAL IME MULISAELLIE ORBI DEERMINAION FOR ONSELLAION MAINENANE Jairo avalcanti
Proceedings of OBEM 7 opyright 7 by ABM 9th International ongress of Mechanical Engineering November 5-9, 7, Brasília, DF REAL IME MULISAELLIE ORBI DEERMINAION FOR ONSELLAION MAINENANE Jairo avalcanti
Understanding the Differences between LS Algorithms and Sequential Filters
 Understanding the Differences between LS Algorithms and Sequential Filters In order to perform meaningful comparisons between outputs from a least squares (LS) orbit determination algorithm and orbit determination
Understanding the Differences between LS Algorithms and Sequential Filters In order to perform meaningful comparisons between outputs from a least squares (LS) orbit determination algorithm and orbit determination
Autonomous Orbit Determination via Kalman Filtering of Gravity Gradients
 TAES-15387-R1 1 Autonomous Orbit Determination via Kalman Filtering of Gravity Gradients Xiucong Sun, Pei Chen, Christophe Macabiau, and Chao Han Abstract Spaceborne gravity gradients are proposed in this
TAES-15387-R1 1 Autonomous Orbit Determination via Kalman Filtering of Gravity Gradients Xiucong Sun, Pei Chen, Christophe Macabiau, and Chao Han Abstract Spaceborne gravity gradients are proposed in this
NONLINEAR BAYESIAN FILTERING FOR STATE AND PARAMETER ESTIMATION
 NONLINEAR BAYESIAN FILTERING FOR STATE AND PARAMETER ESTIMATION Kyle T. Alfriend and Deok-Jin Lee Texas A&M University, College Station, TX, 77843-3141 This paper provides efficient filtering algorithms
NONLINEAR BAYESIAN FILTERING FOR STATE AND PARAMETER ESTIMATION Kyle T. Alfriend and Deok-Jin Lee Texas A&M University, College Station, TX, 77843-3141 This paper provides efficient filtering algorithms
Kalman Filter Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Lecture 7: Optimal Smoothing
 Department of Biomedical Engineering and Computational Science Aalto University March 17, 2011 Contents 1 What is Optimal Smoothing? 2 Bayesian Optimal Smoothing Equations 3 Rauch-Tung-Striebel Smoother
Department of Biomedical Engineering and Computational Science Aalto University March 17, 2011 Contents 1 What is Optimal Smoothing? 2 Bayesian Optimal Smoothing Equations 3 Rauch-Tung-Striebel Smoother
ECE531 Lecture 11: Dynamic Parameter Estimation: Kalman-Bucy Filter
 ECE531 Lecture 11: Dynamic Parameter Estimation: Kalman-Bucy Filter D. Richard Brown III Worcester Polytechnic Institute 09-Apr-2009 Worcester Polytechnic Institute D. Richard Brown III 09-Apr-2009 1 /
ECE531 Lecture 11: Dynamic Parameter Estimation: Kalman-Bucy Filter D. Richard Brown III Worcester Polytechnic Institute 09-Apr-2009 Worcester Polytechnic Institute D. Richard Brown III 09-Apr-2009 1 /
Local Ensemble Transform Kalman Filter
 Local Ensemble Transform Kalman Filter Brian Hunt 11 June 2013 Review of Notation Forecast model: a known function M on a vector space of model states. Truth: an unknown sequence {x n } of model states
Local Ensemble Transform Kalman Filter Brian Hunt 11 June 2013 Review of Notation Forecast model: a known function M on a vector space of model states. Truth: an unknown sequence {x n } of model states
TSRT14: Sensor Fusion Lecture 8
 TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
An Analysis of N-Body Trajectory Propagation. Senior Project. In Partial Fulfillment. of the Requirements for the Degree
 An Analysis of N-Body Trajectory Propagation Senior Project In Partial Fulfillment of the Requirements for the Degree Bachelor of Science in Aerospace Engineering by Emerson Frees June, 2011 An Analysis
An Analysis of N-Body Trajectory Propagation Senior Project In Partial Fulfillment of the Requirements for the Degree Bachelor of Science in Aerospace Engineering by Emerson Frees June, 2011 An Analysis
On Sun-Synchronous Orbits and Associated Constellations
 On Sun-Synchronous Orbits and Associated Constellations Daniele Mortari, Matthew P. Wilkins, and Christian Bruccoleri Department of Aerospace Engineering, Texas A&M University, College Station, TX 77843,
On Sun-Synchronous Orbits and Associated Constellations Daniele Mortari, Matthew P. Wilkins, and Christian Bruccoleri Department of Aerospace Engineering, Texas A&M University, College Station, TX 77843,
9 Multi-Model State Estimation
 Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
New Control Methodology for Nonlinear Systems and Its Application to Astrodynamics
 New Control Methodology for Nonlinear Systems and Its Application to Astrodynamics Hancheol Cho, Ph.D. Marie-Curie COFUND Postdoctoral Fellow Space Structures and Systems Laboratory (S3L) Department of
New Control Methodology for Nonlinear Systems and Its Application to Astrodynamics Hancheol Cho, Ph.D. Marie-Curie COFUND Postdoctoral Fellow Space Structures and Systems Laboratory (S3L) Department of
EKF and SLAM. McGill COMP 765 Sept 18 th, 2017
 EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
A space probe to Jupiter
 Problem 3 Page 1 Problem 3 A space probe to Jupiter We consider in this problem a method frequently used to accelerate space probes in the desired direction. The space probe flies by a planet, and can
Problem 3 Page 1 Problem 3 A space probe to Jupiter We consider in this problem a method frequently used to accelerate space probes in the desired direction. The space probe flies by a planet, and can
RADAR-OPTICAL OBSERVATION MIX
 RADAR-OPTICAL OBSERVATION MIX Felix R. Hoots + Deep space satellites, having a period greater than or equal to 225 minutes, can be tracked by either radar or optical sensors. However, in the US Space Surveillance
RADAR-OPTICAL OBSERVATION MIX Felix R. Hoots + Deep space satellites, having a period greater than or equal to 225 minutes, can be tracked by either radar or optical sensors. However, in the US Space Surveillance
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Lecture 6: Bayesian Inference in SDE Models
 Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
Greg Welch and Gary Bishop. University of North Carolina at Chapel Hill Department of Computer Science.
 STC Lecture Series An Introduction to the Kalman Filter Greg Welch and Gary Bishop University of North Carolina at Chapel Hill Department of Computer Science http://www.cs.unc.edu/~welch/kalmanlinks.html
STC Lecture Series An Introduction to the Kalman Filter Greg Welch and Gary Bishop University of North Carolina at Chapel Hill Department of Computer Science http://www.cs.unc.edu/~welch/kalmanlinks.html
Data assimilation in high dimensions
 Data assimilation in high dimensions David Kelly Courant Institute New York University New York NY www.dtbkelly.com February 12, 2015 Graduate seminar, CIMS David Kelly (CIMS) Data assimilation February
Data assimilation in high dimensions David Kelly Courant Institute New York University New York NY www.dtbkelly.com February 12, 2015 Graduate seminar, CIMS David Kelly (CIMS) Data assimilation February
A SELF-TUNING KALMAN FILTER FOR AUTONOMOUS SPACECRAFT NAVIGATION
 A SELF-TUNING KALMAN FILTER FOR AUTONOMOUS SPACECRAFT NAVIGATION Son H. Truong National Aeronautics and Space Administration (NASA) Goddard Space Flight Center (GSFC) Greenbelt, Maryland, USA 2771 E-mail:
A SELF-TUNING KALMAN FILTER FOR AUTONOMOUS SPACECRAFT NAVIGATION Son H. Truong National Aeronautics and Space Administration (NASA) Goddard Space Flight Center (GSFC) Greenbelt, Maryland, USA 2771 E-mail:
CDGPS-Based Relative Navigation for Multiple Spacecraft. Megan Leigh Mitchell
 CDGPS-Based Relative Navigation for Multiple Spacecraft by Megan Leigh Mitchell Bachelor of Science Aerospace Engineering University of Texas at Austin, 2000 Submitted to the Department of Aeronautics
CDGPS-Based Relative Navigation for Multiple Spacecraft by Megan Leigh Mitchell Bachelor of Science Aerospace Engineering University of Texas at Austin, 2000 Submitted to the Department of Aeronautics
Satellite Navigation error sources and position estimation
 Satellite Navigation error sources and position estimation Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 6 1 Today s topics Recap: GPS measurements and error sources Signal propagation
Satellite Navigation error sources and position estimation Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 6 1 Today s topics Recap: GPS measurements and error sources Signal propagation
Nonlinear State Estimation! Extended Kalman Filters!
 Nonlinear State Estimation! Extended Kalman Filters! Robert Stengel! Optimal Control and Estimation, MAE 546! Princeton University, 2017!! Deformation of the probability distribution!! Neighboring-optimal
Nonlinear State Estimation! Extended Kalman Filters! Robert Stengel! Optimal Control and Estimation, MAE 546! Princeton University, 2017!! Deformation of the probability distribution!! Neighboring-optimal
v are uncorrelated, zero-mean, white
 6.0 EXENDED KALMAN FILER 6.1 Introduction One of the underlying assumptions of the Kalman filter is that it is designed to estimate the states of a linear system based on measurements that are a linear
6.0 EXENDED KALMAN FILER 6.1 Introduction One of the underlying assumptions of the Kalman filter is that it is designed to estimate the states of a linear system based on measurements that are a linear
Tampere University of Technology. Ala-Luhtala, Juha; Seppänen, Mari; Ali-Löytty, Simo; Piché, Robert; Nurminen, Henri
 Tampere University of Technology Author(s) Title Ala-Luhtala, Juha; Seppänen, Mari; Ali-Löytty, Simo; Piché, Robert; Nurminen, Henri Estimation of initial state and model parameters for autonomous GNSS
Tampere University of Technology Author(s) Title Ala-Luhtala, Juha; Seppänen, Mari; Ali-Löytty, Simo; Piché, Robert; Nurminen, Henri Estimation of initial state and model parameters for autonomous GNSS
ASEN 5050 SPACEFLIGHT DYNAMICS Prox Ops, Lambert
 ASEN 5050 SPACEFLIGHT DYNAMICS Prox Ops, Lambert Prof. Jeffrey S. Parker University of Colorado Boulder Lecture 15: ProxOps, Lambert 1 Announcements Homework #5 is due next Friday 10/10 CAETE by Friday
ASEN 5050 SPACEFLIGHT DYNAMICS Prox Ops, Lambert Prof. Jeffrey S. Parker University of Colorado Boulder Lecture 15: ProxOps, Lambert 1 Announcements Homework #5 is due next Friday 10/10 CAETE by Friday
Gauss s Law & Potential
 Gauss s Law & Potential Lecture 7: Electromagnetic Theory Professor D. K. Ghosh, Physics Department, I.I.T., Bombay Flux of an Electric Field : In this lecture we introduce Gauss s law which happens to
Gauss s Law & Potential Lecture 7: Electromagnetic Theory Professor D. K. Ghosh, Physics Department, I.I.T., Bombay Flux of an Electric Field : In this lecture we introduce Gauss s law which happens to
Dealing with Rotating Coordinate Systems Physics 321. (Eq.1)
") Dealing with Rotating Coordinate Systems Physics 321 The treatment of rotating coordinate frames can be very confusing because there are two different sets of aes, and one set of aes is not constant in
Dealing with Rotating Coordinate Systems Physics 321 The treatment of rotating coordinate frames can be very confusing because there are two different sets of aes, and one set of aes is not constant in
Data assimilation with and without a model
 Data assimilation with and without a model Tyrus Berry George Mason University NJIT Feb. 28, 2017 Postdoc supported by NSF This work is in collaboration with: Tim Sauer, GMU Franz Hamilton, Postdoc, NCSU
Data assimilation with and without a model Tyrus Berry George Mason University NJIT Feb. 28, 2017 Postdoc supported by NSF This work is in collaboration with: Tim Sauer, GMU Franz Hamilton, Postdoc, NCSU
Modern Navigation. Thomas Herring
 12.215 Modern Navigation Thomas Herring Basic Statistics Summary of last class Statistical description and parameters Probability distributions Descriptions: expectations, variances, moments Covariances
12.215 Modern Navigation Thomas Herring Basic Statistics Summary of last class Statistical description and parameters Probability distributions Descriptions: expectations, variances, moments Covariances
The Unscented Particle Filter
 The Unscented Particle Filter Rudolph van der Merwe (OGI) Nando de Freitas (UC Bereley) Arnaud Doucet (Cambridge University) Eric Wan (OGI) Outline Optimal Estimation & Filtering Optimal Recursive Bayesian
The Unscented Particle Filter Rudolph van der Merwe (OGI) Nando de Freitas (UC Bereley) Arnaud Doucet (Cambridge University) Eric Wan (OGI) Outline Optimal Estimation & Filtering Optimal Recursive Bayesian
Adaptive ensemble Kalman filtering of nonlinear systems
 Adaptive ensemble Kalman filtering of nonlinear systems Tyrus Berry George Mason University June 12, 213 : Problem Setup We consider a system of the form: x k+1 = f (x k ) + ω k+1 ω N (, Q) y k+1 = h(x
Adaptive ensemble Kalman filtering of nonlinear systems Tyrus Berry George Mason University June 12, 213 : Problem Setup We consider a system of the form: x k+1 = f (x k ) + ω k+1 ω N (, Q) y k+1 = h(x
DESIGN AND IMPLEMENTATION OF SENSORLESS SPEED CONTROL FOR INDUCTION MOTOR DRIVE USING AN OPTIMIZED EXTENDED KALMAN FILTER
 INTERNATIONAL JOURNAL OF ELECTRONICS AND COMMUNICATION ENGINEERING & TECHNOLOGY (IJECET) International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 ISSN 0976 6464(Print)
INTERNATIONAL JOURNAL OF ELECTRONICS AND COMMUNICATION ENGINEERING & TECHNOLOGY (IJECET) International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 ISSN 0976 6464(Print)
MEETING ORBIT DETERMINATION REQUIREMENTS FOR A SMALL SATELLITE MISSION
 MEETING ORBIT DETERMINATION REQUIREMENTS FOR A SMALL SATELLITE MISSION Adonis Pimienta-Peñalver, Richard Linares, and John L. Crassidis University at Buffalo, State University of New York, Amherst, NY,
MEETING ORBIT DETERMINATION REQUIREMENTS FOR A SMALL SATELLITE MISSION Adonis Pimienta-Peñalver, Richard Linares, and John L. Crassidis University at Buffalo, State University of New York, Amherst, NY,
imin...
 Pulsar Timing For a detailed look at pulsar timing and other pulsar observing techniques, see the Handbook of Pulsar Astronomy by Duncan Lorimer and Michael Kramer. Pulsars are intrinsically interesting
Pulsar Timing For a detailed look at pulsar timing and other pulsar observing techniques, see the Handbook of Pulsar Astronomy by Duncan Lorimer and Michael Kramer. Pulsars are intrinsically interesting
Extension of Farrenkopf Steady-State Solutions with Estimated Angular Rate
 Extension of Farrenopf Steady-State Solutions with Estimated Angular Rate Andrew D. Dianetti and John L. Crassidis University at Buffalo, State University of New Yor, Amherst, NY 46-44 Steady-state solutions
Extension of Farrenopf Steady-State Solutions with Estimated Angular Rate Andrew D. Dianetti and John L. Crassidis University at Buffalo, State University of New Yor, Amherst, NY 46-44 Steady-state solutions
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
AS3010: Introduction to Space Technology
 AS3010: Introduction to Space Technology L E C T U R E S 8-9 Part B, Lectures 8-9 23 March, 2017 C O N T E N T S In this lecture, we will look at factors that cause an orbit to change over time orbital
AS3010: Introduction to Space Technology L E C T U R E S 8-9 Part B, Lectures 8-9 23 March, 2017 C O N T E N T S In this lecture, we will look at factors that cause an orbit to change over time orbital
Data assimilation with and without a model
 Data assimilation with and without a model Tim Sauer George Mason University Parameter estimation and UQ U. Pittsburgh Mar. 5, 2017 Partially supported by NSF Most of this work is due to: Tyrus Berry,
Data assimilation with and without a model Tim Sauer George Mason University Parameter estimation and UQ U. Pittsburgh Mar. 5, 2017 Partially supported by NSF Most of this work is due to: Tyrus Berry,
Introduction to Global Navigation Satellite System (GNSS) Module: 2
 Module: 2") Introduction to Global Navigation Satellite System (GNSS) Module: 2 Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide :
Introduction to Global Navigation Satellite System (GNSS) Module: 2 Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide :
LINEARIZED ORBIT COVARIANCE GENERATION AND PROPAGATION ANALYSIS VIA SIMPLE MONTE CARLO SIMULATIONS
 LINEARIZED ORBIT COVARIANCE GENERATION AND PROPAGATION ANALYSIS VIA SIMPLE MONTE CARLO SIMULATIONS Chris Sabol, Paul Schumacher AFRL Thomas Sukut USAFA Terry Alfriend Texas A&M Keric Hill PDS Brendan Wright
LINEARIZED ORBIT COVARIANCE GENERATION AND PROPAGATION ANALYSIS VIA SIMPLE MONTE CARLO SIMULATIONS Chris Sabol, Paul Schumacher AFRL Thomas Sukut USAFA Terry Alfriend Texas A&M Keric Hill PDS Brendan Wright
Introduction to Unscented Kalman Filter
 Introduction to Unscented Kalman Filter 1 Introdution In many scientific fields, we use certain models to describe the dynamics of system, such as mobile robot, vision tracking and so on. The word dynamics
Introduction to Unscented Kalman Filter 1 Introdution In many scientific fields, we use certain models to describe the dynamics of system, such as mobile robot, vision tracking and so on. The word dynamics
SPACECRAFT NAVIGATION AND MISSION SIMULATION
 TianQin Space-borne gravitational wave detector SPACECRAFT NAVIGATION AND MISSION SIMULATION December 9, 2015 - Prepared by Viktor T. Toth A PERSPECTIVE Precision navigation End-to-end mission simulation
TianQin Space-borne gravitational wave detector SPACECRAFT NAVIGATION AND MISSION SIMULATION December 9, 2015 - Prepared by Viktor T. Toth A PERSPECTIVE Precision navigation End-to-end mission simulation
Effect of Coordinate Switching on Translunar Trajectory Simulation Accuracy
 Effect of Coordinate Switching on Translunar Trajectory Simulation Accuracy Mana P. Vautier Auburn University, Auburn, AL, 36849, USA This paper focuses on the affect of round-off error in the accurate
Effect of Coordinate Switching on Translunar Trajectory Simulation Accuracy Mana P. Vautier Auburn University, Auburn, AL, 36849, USA This paper focuses on the affect of round-off error in the accurate
E190Q Lecture 11 Autonomous Robot Navigation
 E190Q Lecture 11 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 013 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
E190Q Lecture 11 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 013 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
Orekit at the U.S. Naval Research Laboratory. Evan Ward
 Orekit at the U.S. Naval Research Laboratory Evan Ward U.S. Naval Research Laboratory Astrodynamics and Navigation Section, Washington DC November 16, 2017 Outline Introduction Geolocation with Orekit
Orekit at the U.S. Naval Research Laboratory Evan Ward U.S. Naval Research Laboratory Astrodynamics and Navigation Section, Washington DC November 16, 2017 Outline Introduction Geolocation with Orekit
DATA FUSION III: Estimation Theory
 DATA FUSION III: Estimation Theory Date: March 30, 2006 Time: 5:00 7:30 PM Location: B-300-2-3 (AAR-400) (Main Building, 2nd floor, near freight elevators) Instructor: Dr. James K Beard Credits: 1 Course
DATA FUSION III: Estimation Theory Date: March 30, 2006 Time: 5:00 7:30 PM Location: B-300-2-3 (AAR-400) (Main Building, 2nd floor, near freight elevators) Instructor: Dr. James K Beard Credits: 1 Course
MODELLING OF PERTURBATIONS FOR PRECISE ORBIT DETERMINATION
 MODELLING OF PERTURBATIONS FOR PRECISE ORBIT DETERMINATION 1 SHEN YU JUN, 2 TAN YAN QUAN, 3 TAN GUOXIAN 1,2,3 Raffles Science Institute, Raffles Institution, 1 Raffles Institution Lane, Singapore E-mail:
MODELLING OF PERTURBATIONS FOR PRECISE ORBIT DETERMINATION 1 SHEN YU JUN, 2 TAN YAN QUAN, 3 TAN GUOXIAN 1,2,3 Raffles Science Institute, Raffles Institution, 1 Raffles Institution Lane, Singapore E-mail:
AIM RS: Radio Science Investigation with AIM
 Prepared by: University of Bologna Ref. number: ALMARS012016 Version: 1.0 Date: 08/03/2017 PROPOSAL TO ESA FOR AIM RS Radio Science Investigation with AIM ITT Reference: Partners: Radio Science and Planetary
Prepared by: University of Bologna Ref. number: ALMARS012016 Version: 1.0 Date: 08/03/2017 PROPOSAL TO ESA FOR AIM RS Radio Science Investigation with AIM ITT Reference: Partners: Radio Science and Planetary
Sequential Orbit Determination with the. Cubed-Sphere Gravity Model
 Sequential Orbit Determination with the Cubed-Sphere Gravity Model Brandon A. Jones 1, George H. Born 2, and Gregory Beylkin 3 University of Colorado, Boulder, CO, 80309, USA The cubed-sphere model provides
Sequential Orbit Determination with the Cubed-Sphere Gravity Model Brandon A. Jones 1, George H. Born 2, and Gregory Beylkin 3 University of Colorado, Boulder, CO, 80309, USA The cubed-sphere model provides
Stochastic Models, Estimation and Control Peter S. Maybeck Volumes 1, 2 & 3 Tables of Contents
 Navtech Part #s Volume 1 #1277 Volume 2 #1278 Volume 3 #1279 3 Volume Set #1280 Stochastic Models, Estimation and Control Peter S. Maybeck Volumes 1, 2 & 3 Tables of Contents Volume 1 Preface Contents
Navtech Part #s Volume 1 #1277 Volume 2 #1278 Volume 3 #1279 3 Volume Set #1280 Stochastic Models, Estimation and Control Peter S. Maybeck Volumes 1, 2 & 3 Tables of Contents Volume 1 Preface Contents
The Use of Short-Arc Angle and Angle Rate Data for Deep-Space Initial Orbit Determination and Track Association
 The Use of Short-Arc Angle and Angle Rate Data for Deep-Space Initial Orbit Determination and Track Association Dr. Moriba Jah (AFRL) Mr. Kyle DeMars (UT-Austin) Dr. Paul Schumacher Jr. (AFRL) Background/Motivation
The Use of Short-Arc Angle and Angle Rate Data for Deep-Space Initial Orbit Determination and Track Association Dr. Moriba Jah (AFRL) Mr. Kyle DeMars (UT-Austin) Dr. Paul Schumacher Jr. (AFRL) Background/Motivation
A Mission to Planet Mars Gravity Field Determination
 A Mission to Planet Mars Gravity Field Determination Department for Theoretical Geodesy Graz University of Technology and Space Research Institute Austrian Academy of Sciences Gravity field CHAMP GRACE
A Mission to Planet Mars Gravity Field Determination Department for Theoretical Geodesy Graz University of Technology and Space Research Institute Austrian Academy of Sciences Gravity field CHAMP GRACE
Vector and Matrix Norms. Vector and Matrix Norms
 Vector and Matrix Norms Vector Space Algebra Matrix Algebra: We let x x and A A, where, if x is an element of an abstract vector space n, and A = A: n m, then x is a complex column vector of length n whose
Vector and Matrix Norms Vector Space Algebra Matrix Algebra: We let x x and A A, where, if x is an element of an abstract vector space n, and A = A: n m, then x is a complex column vector of length n whose
Gaussian Filtering Strategies for Nonlinear Systems
 Gaussian Filtering Strategies for Nonlinear Systems Canonical Nonlinear Filtering Problem ~u m+1 = ~ f (~u m )+~ m+1 ~v m+1 = ~g(~u m+1 )+~ o m+1 I ~ f and ~g are nonlinear & deterministic I Noise/Errors
Gaussian Filtering Strategies for Nonlinear Systems Canonical Nonlinear Filtering Problem ~u m+1 = ~ f (~u m )+~ m+1 ~v m+1 = ~g(~u m+1 )+~ o m+1 I ~ f and ~g are nonlinear & deterministic I Noise/Errors
AN ANALYTICAL SOLUTION TO QUICK-RESPONSE COLLISION AVOIDANCE MANEUVERS IN LOW EARTH ORBIT
 AAS 16-366 AN ANALYTICAL SOLUTION TO QUICK-RESPONSE COLLISION AVOIDANCE MANEUVERS IN LOW EARTH ORBIT Jason A. Reiter * and David B. Spencer INTRODUCTION Collision avoidance maneuvers to prevent orbital
AAS 16-366 AN ANALYTICAL SOLUTION TO QUICK-RESPONSE COLLISION AVOIDANCE MANEUVERS IN LOW EARTH ORBIT Jason A. Reiter * and David B. Spencer INTRODUCTION Collision avoidance maneuvers to prevent orbital
L06. LINEAR KALMAN FILTERS. NA568 Mobile Robotics: Methods & Algorithms
 L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
PHYSICS. Chapter 8 Lecture FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E RANDALL D. KNIGHT Pearson Education, Inc.
 PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 8 Lecture RANDALL D. KNIGHT Chapter 8. Dynamics II: Motion in a Plane IN THIS CHAPTER, you will learn to solve problems about motion
PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 8 Lecture RANDALL D. KNIGHT Chapter 8. Dynamics II: Motion in a Plane IN THIS CHAPTER, you will learn to solve problems about motion
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
SIMPLIFIED ORBIT DETERMINATION ALGORITHM FOR LOW EARTH ORBIT SATELLITES USING SPACEBORNE GPS NAVIGATION SENSOR
 ARTIFICIAL SATELLITES, Vol. 49, No. 2 2014 DOI: 10.2478/arsa-2014-0007 SIMPLIFIED ORBIT DETERMINATION ALGORITHM FOR LOW EARTH ORBIT SATELLITES USING SPACEBORNE GPS NAVIGATION SENSOR ABSTRACT Sandip Tukaram
ARTIFICIAL SATELLITES, Vol. 49, No. 2 2014 DOI: 10.2478/arsa-2014-0007 SIMPLIFIED ORBIT DETERMINATION ALGORITHM FOR LOW EARTH ORBIT SATELLITES USING SPACEBORNE GPS NAVIGATION SENSOR ABSTRACT Sandip Tukaram
Modeling, Dynamics and Control of Spacecraft Relative Motion in a Perturbed Keplerian Orbit
 Paper Int l J. of Aeronautical & Space Sci. 16(1), 77 88 (2015) http://dx.doi.org/10.5139/ijass.2015.16.1.77 Modeling, Dynamics and Control of Spacecraft Relative Motion in a Perturbed Keplerian Orbit
Paper Int l J. of Aeronautical & Space Sci. 16(1), 77 88 (2015) http://dx.doi.org/10.5139/ijass.2015.16.1.77 Modeling, Dynamics and Control of Spacecraft Relative Motion in a Perturbed Keplerian Orbit
Chapter 3 Numerical Methods
 Chapter 3 Numerical Methods Part 2 3.2 Systems of Equations 3.3 Nonlinear and Constrained Optimization 1 Outline 3.2 Systems of Equations 3.3 Nonlinear and Constrained Optimization Summary 2 Outline 3.2
Chapter 3 Numerical Methods Part 2 3.2 Systems of Equations 3.3 Nonlinear and Constrained Optimization 1 Outline 3.2 Systems of Equations 3.3 Nonlinear and Constrained Optimization Summary 2 Outline 3.2
The Effect of Stale Ranging Data on Indoor 2-D Passive Localization
 The Effect of Stale Ranging Data on Indoor 2-D Passive Localization Chen Xia and Lance C. Pérez Department of Electrical Engineering University of Nebraska-Lincoln, USA chenxia@mariner.unl.edu lperez@unl.edu
The Effect of Stale Ranging Data on Indoor 2-D Passive Localization Chen Xia and Lance C. Pérez Department of Electrical Engineering University of Nebraska-Lincoln, USA chenxia@mariner.unl.edu lperez@unl.edu
Midterm for Introduction to Numerical Analysis I, AMSC/CMSC 466, on 10/29/2015
 Midterm for Introduction to Numerical Analysis I, AMSC/CMSC 466, on 10/29/2015 The test lasts 1 hour and 15 minutes. No documents are allowed. The use of a calculator, cell phone or other equivalent electronic
Midterm for Introduction to Numerical Analysis I, AMSC/CMSC 466, on 10/29/2015 The test lasts 1 hour and 15 minutes. No documents are allowed. The use of a calculator, cell phone or other equivalent electronic
Fundamentals of Astrodynamics and Applications
 Fundamentals of Astrodynamics and Applications Third Edition David A. Vallado with technical contributions by Wayne D. McClain Space Technology Library Published Jointly by Microcosm Press Hawthorne, CA
Fundamentals of Astrodynamics and Applications Third Edition David A. Vallado with technical contributions by Wayne D. McClain Space Technology Library Published Jointly by Microcosm Press Hawthorne, CA
Extending the Patched-Conic Approximation to the Restricted Four-Body Problem
 Monografías de la Real Academia de Ciencias de Zaragoza 3, 133 146, (6). Extending the Patched-Conic Approximation to the Restricted Four-Body Problem Thomas R. Reppert Department of Aerospace and Ocean
Monografías de la Real Academia de Ciencias de Zaragoza 3, 133 146, (6). Extending the Patched-Conic Approximation to the Restricted Four-Body Problem Thomas R. Reppert Department of Aerospace and Ocean
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
CELESTIAL MECHANICS. Part I. Mathematical Preambles
 Chapter 1. Numerical Methods CELESTIAL MECHANICS Part I. Mathematical Preambles 1.1 Introduction 1.2 Numerical Integration 1.3 Quadratic Equations 1.4 The Solution of f(x) = 0 1.5 The Solution of Polynomial
Chapter 1. Numerical Methods CELESTIAL MECHANICS Part I. Mathematical Preambles 1.1 Introduction 1.2 Numerical Integration 1.3 Quadratic Equations 1.4 The Solution of f(x) = 0 1.5 The Solution of Polynomial