Stanford Exploration Project, Report 105, September 5, 2000, pages 41 53
|
|
|
- Ann Wells
- 5 years ago
- Views:
Transcription
1 Stanford Exploration Project, Report 105, September 5, 2000, pages
2 Stanford Exploration Project, Report 105, September 5, 2000, pages Short Note Multiple realizations using standard inversion techniques Robert G. Clapp 1 INTRODUCTION When solving a missing data problem, geophysicists and geostatisticians have very similar strategies. Each use the known data to characterize the model s covariance. At SEP we often characterize the covariance through Prediction Error Filters (PEFs) (Claerbout, 1999). Geostatisticians build variograms from the known data to represent the model s covariance (Isaaks and Srivastava, 1989). Once each has some measure of the model covariance they attempt to fill in the missing data. Here their goals slightly diverge. The geophysicist solves a global estimation problem and attempts to create a model whose covariance is equivalent to the covariance of the known data. The geostatistician performs kriging, solving a series of local estimation problem. Each model estimate is the linear combination of nearby data points that best fits their predetermined covariance estimate. Both of these approaches are in some ways exactly what we want: given a problem give me the answer. The single solution approach however has a couple significant drawbacks. First, the solution tends to have low spatial frequency. Second, it does not provide information on model variability or provide error bars on our model estimate. Geostatisticians have these abilities in their repertoire through what they refer to as multiple realizations or stochastic simulations. They introduce a random component, based on properties (such as variance) of the data, to their estimation procedure. Each realization s frequency content is more accurate and by comparing and contrasting the equiprobable realizations, model variability can be assessed. In this paper I present a method to achieve the same goal using a formulation that better fits into geophysical techniques. I modify the model styling goal, replacing the zero vector with a random vector. I show how the resulting models have a more pleasing texture and can provide information on variability. 1 bob@sep.stanford.edu 41
3 42 Clapp SEP 105 MOTIVATION Regularized linear least squares estimation problems can be written as minimizing the quadratic function Q(m) d Lm 2 2 Am 2 (1) where d is our data, L is our modeling operator, A is our regularization operator and we are inverting for a model m. Alternately, we can write them in terms of fitting goals, d Lm (2) 0 Am, For the purpose of this paper I will refer to the first goal as the data fitting goal and the second as the model styling goal. Normally we think of data fitting goal as describing the physics of the problem. The model styling goal is suppose to provide information about the model character. Ideally A should be the inverse model covariance. In practice we don t have the model covariance so we attempt to approximate it through another operator. At SEP the regularization operator is typically one of the following: Laplacian or gradient a simple operator that assumes nothing about the model Prediction Error Filter (PEF) a stationary operator estimated from known portions of the model or some field with the same properties as the model (Claerbout, 1999) steering filter a non-stationary operator built from minimal information about the model (Clapp et al., 1997) non-stationary PEF a non-stationary operator built from a field with the same properties as the model (Crawley, 2000). A problem with the first three operators is that while they approximate the model covariance, they have little concept of model variance. As a result our model estimates tend to have the wrong statistical properties. MISSING DATA The missing data problem is probably the simplest to understand and interpret results. We begin by binning our data onto a regular mesh. For L in fitting goals (2) we will use a selector matrix J, which is 1 at locations where we have data and 0 at unknown locations. As an example, let s try to interpolate a day s worth of data collected by SeaBeam (Figure 1), which measures water depth under and to the side of a ship (Claerbout, 1999). Figure 2 shows the result of estimating a PEF from the known data locations and then using it to interpolate the entire mesh. Note how the solution has a lower spatial frequency as we move away from the recorded data. In addition, the original tracks of the ship are still clearly visible.
.")
4 SEP 105 Multiple realizations 43 Figure 1: Depth of the ocean under ship tracks. bob3-sea.init [ER] Figure 2: Result of using a PEF to interpolate Figure 1, taken from GEE (Claerbout, 1999). bob3-sea.pef [ER,M]
5 44 Clapp SEP 105 If we look at a histograms of the known data and our estimated data we can see the effect of the PEF. The histogram of the known data has a nice Gaussian shape. The predicted data is much less Gaussian with a much lower variance. We want estimated data to have the same statistical properties as the known data (for a Gaussian distribution this means matching the mean and variance). Figure 3: Histogram for the known data (solid lines) and the estimated data ( * ). Note the dissimilar shapes. bob3-pef.histo [ER,M] Geostatisticians are confronted with the same problem. They can produce smooth, low frequency models through kriging, but must add a little twist to get model with the statistical properties as the data. To understand how, a brief review of kriging is necessary. Kriging estimates each model point by a linear combination of nearby data points. For simplicity lets assume that the data has a standard normal distribution. The geostatistician find all of the points m 1...m n around the point they are trying to estimate m 0. The vector distance between all data points d ij and each data point and the estimation point d i0 are then computed. Using the predefined covariance function estimate C, a covariance value is then extracted between all known point pairs C i j and between known points and estimation point C i0 at the given distances d ij and d i0 (Figure 4). They compute the weights ( 1... n) by solving the set of equations implied by C C 1n C n1... C nn n C C n0 1. (3) Estimating m 0 is then simply, m 0 n i 1 im i. (4)
6 SEP 105 Multiple realizations 45 To guarantee that the matrix in equation (3) is invertible geostatisticians approximate the covariance function through a linear combination of a limited set of functions that guarantee that the matrix in equation (3) is positive-definite and therefore invertible. The smooth models Covariance 1, ,2 1,2 0,1 2,2 0,3 2,3 Figure 4: Definition of the terms in equation (3). A vector is drawn between two points. The covariance at the angle and distance describing the vector is then selected. bob3-covar-def [NR] provided by kriging often prove to be poor representations of earth properties. A classic example is fluid flow where kriged models tend to give inaccurate predictions. The geostatistical solution is to perform Gaussian stochastic simulation, rather than kriging, to estimate the field (Deutsch and Journel, 1992). There are two major differences between kriging and simulation. The primary difference is that a random component is introduced into the estimation process. Stochastic simulation, or sequential Gaussian simulation, begins with a random point being selected in the model space. They then perform kriging, obtaining a kriged value m 0 and a kriging variance k. Instead of using m 0 for the model value we select a random number from a normal distribution. We use as our model point estimate m i, m i m 0 k. (5) We then select a new point in the model space and repeat the procedure. To preserve spatial variability, a second change is made: all the previously estimated points are treated as data when estimating new points guaranteeing that the model matches the covariance estimate. By selecting different random numbers (and/or visiting model points in a different order) we will get a different, equiprobable model estimate. The advantage of the models estimated through simulation is that they have not only the covariance of they data, but also the variance. As a result the models estimated by simulation give more realistic fluid flow measurements compared to a kriged model. In addition, by trying different realizations fluid flow variability can be assessed.
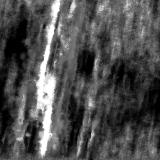
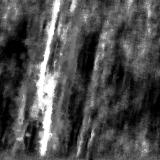
7 46 Clapp SEP 105 The difference between kriging and simulation has a corollary in our least squares estimation problem. To see how let s write our fitting goals in a slightly different format, r d d Jm r m Am, (6) where r d is our data residual and r m is our model residual. The model residual is the result of applying our covariance estimate A to our model estimate. The larger the value of a given r m, the less that model point makes sense with its surrounding points, given our idea of covariance. This is similar to kriging variance. It follows that we might be able to obtain something similar to the geostatistician s simulations by rewriting our fitting goals as d Jm v Am, (7) where v is a vector of random normal numbers and is a measure of our estimation uncertainty 2. By adjusting we can change the distribution of m. For example, let s return to the SeaBeam example. Figure 5 shows four different model estimations using a normal distribution and various values for the variance. Note how the texture of the model changes significantly. If we look at a histogram of the various realizations (Figure 6), we see that the correct distribution is somewhere between our second and third realization. We can get an estimate of, or in the case of the missing data problem, by applying fitting goals (6). If we look at the variance of the model residual (m r ) and (d) we can get a good estimate of, (r m ) (d). (8) Figure 7 shows eight different realizations with a random noise level calculated through equation (8). Note how we have done a good job emulating the distribution of the known data. Each image shows some similar features but also significant differences (especially note within the V portion of the known data). A potentially attractive feature of setting up the problem in this manner is that it easy to have both a space-varying covariance function (a steering filter or non-stationary PEF) along with a non-stationary variance. Figure 8 shows the SeaBeam example again with the variance increasing from left to right. SUPER DIX In general the operator L in fitting goals (7) is much more complex than the simple masking operator used in the missing data problem. One of the most attractive potential uses for a 2 For the missing data problem could be used exclusively. As our data fitting goal becomes more complex, having a separate and becomes useful.
 and the four different realizations of Figure 5.")
8 SEP 105 Multiple realizations 47 Figure 5: Four different realizations with increasing in fitting goals (7). bob3-distrib [ER,M] Figure 6: Histogram of the known data (solid line) and the four different realizations of Figure 5. bob3-movie.distir [ER,M]



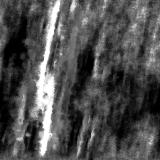

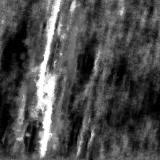
9 48 Clapp SEP 105 Figure 7: Eight different realizations of the SeaBeam interpolation problem and their histograms. Note how the realizations vary away from the known data points. bob3-sea.movie [ER,M]
10 SEP 105 Multiple realizations 49 Figure 8: Realization where the variance added to the image increases from left to right. bob3-non-stat [ER,M] range of equiprobable models is in velocity estimation. As a result I decided to next test the methodology on one of the simplest velocity estimation operators, the Dix equation (Dix, 1955). Following the methodology of Clapp et al. (1998), I start from a CMP gather q(t, i) moveout corrected with velocity. A good starting guess for our RMS velocity function is the maximum instantaneous stack energy, stack(t, ) n i 0 NMO v (q(t,i)). (9) Not all times have reflections so we don t weight each rms (t) equivalently. Instead we introduce a diagonal weighting matrix, W, found from stack energy at each selected rms (t). Our data fitting goal becomes 0 W[Cu d]. (10) We are multiplying our RMS function by our time so must make a slight change in our weighting function. To give early times approximately the same priority as later times, we need to multiply our weighting function by the inverse, W W. (11) Next we need to add in regularization. I define a steering filter operator A that influences the model to introduce velocity changes that follow structural dip. I replace the zero vector with a random vector and precondition the problem (Fomel et al., 1997) to get 0 W (CA 1 p d) v p. (12) To test the methodology I took a 2-D line from a 3-D North Sea dataset provided by Unocal. Figure 9 shows four different realizations with varying levels of. I then chose
 with increasing levels of Gaussian noise in v. bob3-scale.10.")
11 50 Clapp SEP 105 Figure 9: Four different realization of fitting goals (12) with increasing levels of Gaussian noise in v. bob3-scale.10.x2 [ER,M]
12 SEP 105 Multiple realizations 51 what I considered a reasonable variability level, and constructed ten equiprobable models (Figure 10). Note that the general shapes of the models are very similar. What we see are smaller structural changes. For example, look at the range between.7s and 1.1s. Generally each realization tries to put a high velocity layer in this region, but thickness and magnitude varies in the different realizations. Figure 10: Four of the ten different realization of fitting goals (12) with constant Gaussian noise in v. bob3-dix-real [ER,M] FUTURE WORK In this paper I glossed over several problems. First, should be a space-varying function rather than the constant I proposed. A bootstrap approach (using the model residual at one non-linear iteration as our guess at a space-varying ) might prove effective but hasn t been tested. How to calculate for the non-missing data problem is an open question. In the
13 52 Clapp SEP 105 generic geophysical operator L, we often don t know which model components are estimated through the data fitting goal and which are estimated by the model styling goal. Finally, I made the assumption that I was dealing with models with a normal distribution. Whether replacing v with another distribution or using something similar to the geostatistician s normal-score transform would be effective in correctly modeling these distributions is unknown. CONCLUSIONS I have demonstrated a new method for creating equiprobable realizations using standard geophysical inversion techniques. The character of resulting models is much more consistent than models derived by standard techniques. REFERENCES Claerbout, J., 1999, Geophysical estimation by example: Environmental soundings image enhancement: Stanford Exploration Project, Clapp, R. G., Fomel, S., and Claerbout, J., 1997, Solution steering with space-variant filters: SEP 95, Clapp, R. G., Sava, P., and Claerbout, J. F., 1998, Interval velocity estimation with a nullspace: SEP 97, Crawley, S., 2000, Seismic trace interpolation with nonstationary prediction-error filters: SEP 104. Deutsch, C. V., and Journel, A., 1992, GSLIB: Geostatistical software library and user s guide: Oxford University Press. Dix, C. H., 1955, Seismic velocities from surface measurements: Geophysics, 20, no. 1, Fomel, S., Clapp, R., and Claerbout, J., 1997, Missing data interpolation by recursive filter preconditioning: SEP 95, Isaaks, E. H., and Srivastava, R. M., 1989, An Introduction to Applied Geostatistics: Oxford University Press.
14 200 SEP 105
Multiple realizations using standard inversion techniques a
 Multiple realizations using standard inversion techniques a a Published in SEP report, 105, 67-78, (2000) Robert G Clapp 1 INTRODUCTION When solving a missing data problem, geophysicists and geostatisticians
Multiple realizations using standard inversion techniques a a Published in SEP report, 105, 67-78, (2000) Robert G Clapp 1 INTRODUCTION When solving a missing data problem, geophysicists and geostatisticians
Multiple realizations: Model variance and data uncertainty
 Stanford Exploration Project, Report 108, April 29, 2001, pages 1?? Multiple realizations: Model variance and data uncertainty Robert G. Clapp 1 ABSTRACT Geophysicists typically produce a single model,
Stanford Exploration Project, Report 108, April 29, 2001, pages 1?? Multiple realizations: Model variance and data uncertainty Robert G. Clapp 1 ABSTRACT Geophysicists typically produce a single model,
Effect of velocity uncertainty on amplitude information
 Stanford Exploration Project, Report 111, June 9, 2002, pages 253 267 Short Note Effect of velocity uncertainty on amplitude information Robert G. Clapp 1 INTRODUCTION Risk assessment is a key component
Stanford Exploration Project, Report 111, June 9, 2002, pages 253 267 Short Note Effect of velocity uncertainty on amplitude information Robert G. Clapp 1 INTRODUCTION Risk assessment is a key component
Smoothing along geologic dip
 Chapter 1 Smoothing along geologic dip INTRODUCTION AND SUMMARY Velocity estimation is generally under-determined. To obtain a pleasing result we impose some type of regularization criteria such as preconditioning(harlan,
Chapter 1 Smoothing along geologic dip INTRODUCTION AND SUMMARY Velocity estimation is generally under-determined. To obtain a pleasing result we impose some type of regularization criteria such as preconditioning(harlan,
Incorporating geologic information into reflection tomography
 GEOPHYSICS, VOL. 69, NO. 2 (MARCH-APRIL 2004); P. 533 546, 27 FIGS. 10.1190/1.1707073 Incorporating geologic information into reflection tomography Robert G. Clapp, Biondo Biondi, and Jon F. Claerbout
GEOPHYSICS, VOL. 69, NO. 2 (MARCH-APRIL 2004); P. 533 546, 27 FIGS. 10.1190/1.1707073 Incorporating geologic information into reflection tomography Robert G. Clapp, Biondo Biondi, and Jon F. Claerbout
Regularizing seismic inverse problems by model reparameterization using plane-wave construction
 GEOPHYSICS, VOL. 71, NO. 5 SEPTEMBER-OCTOBER 2006 ; P. A43 A47, 6 FIGS. 10.1190/1.2335609 Regularizing seismic inverse problems by model reparameterization using plane-wave construction Sergey Fomel 1
GEOPHYSICS, VOL. 71, NO. 5 SEPTEMBER-OCTOBER 2006 ; P. A43 A47, 6 FIGS. 10.1190/1.2335609 Regularizing seismic inverse problems by model reparameterization using plane-wave construction Sergey Fomel 1
A Short Note on the Proportional Effect and Direct Sequential Simulation
 A Short Note on the Proportional Effect and Direct Sequential Simulation Abstract B. Oz (boz@ualberta.ca) and C. V. Deutsch (cdeutsch@ualberta.ca) University of Alberta, Edmonton, Alberta, CANADA Direct
A Short Note on the Proportional Effect and Direct Sequential Simulation Abstract B. Oz (boz@ualberta.ca) and C. V. Deutsch (cdeutsch@ualberta.ca) University of Alberta, Edmonton, Alberta, CANADA Direct
4th HR-HU and 15th HU geomathematical congress Geomathematics as Geoscience Reliability enhancement of groundwater estimations
 Reliability enhancement of groundwater estimations Zoltán Zsolt Fehér 1,2, János Rakonczai 1, 1 Institute of Geoscience, University of Szeged, H-6722 Szeged, Hungary, 2 e-mail: zzfeher@geo.u-szeged.hu
Reliability enhancement of groundwater estimations Zoltán Zsolt Fehér 1,2, János Rakonczai 1, 1 Institute of Geoscience, University of Szeged, H-6722 Szeged, Hungary, 2 e-mail: zzfeher@geo.u-szeged.hu
Short Note. Plane wave prediction in 3-D. Sergey Fomel 1 INTRODUCTION
 Stanford Exploration Project, Report SERGEY, November 9, 2000, pages 291?? Short Note Plane wave prediction in 3-D Sergey Fomel 1 INTRODUCTION The theory of plane-wave prediction in three dimensions is
Stanford Exploration Project, Report SERGEY, November 9, 2000, pages 291?? Short Note Plane wave prediction in 3-D Sergey Fomel 1 INTRODUCTION The theory of plane-wave prediction in three dimensions is
On non-stationary convolution and inverse convolution
 Stanford Exploration Project, Report 102, October 25, 1999, pages 1 137 On non-stationary convolution and inverse convolution James Rickett 1 keywords: helix, linear filtering, non-stationary deconvolution
Stanford Exploration Project, Report 102, October 25, 1999, pages 1 137 On non-stationary convolution and inverse convolution James Rickett 1 keywords: helix, linear filtering, non-stationary deconvolution
An example of inverse interpolation accelerated by preconditioning
 Stanford Exploration Project, Report 84, May 9, 2001, pages 1 290 Short Note An example of inverse interpolation accelerated by preconditioning Sean Crawley 1 INTRODUCTION Prediction error filters can
Stanford Exploration Project, Report 84, May 9, 2001, pages 1 290 Short Note An example of inverse interpolation accelerated by preconditioning Sean Crawley 1 INTRODUCTION Prediction error filters can
Modeling of Atmospheric Effects on InSAR Measurements With the Method of Stochastic Simulation
 Modeling of Atmospheric Effects on InSAR Measurements With the Method of Stochastic Simulation Z. W. LI, X. L. DING Department of Land Surveying and Geo-Informatics, Hong Kong Polytechnic University, Hung
Modeling of Atmospheric Effects on InSAR Measurements With the Method of Stochastic Simulation Z. W. LI, X. L. DING Department of Land Surveying and Geo-Informatics, Hong Kong Polytechnic University, Hung
Combining geological surface data and geostatistical model for Enhanced Subsurface geological model
 Combining geological surface data and geostatistical model for Enhanced Subsurface geological model M. Kurniawan Alfadli, Nanda Natasia, Iyan Haryanto Faculty of Geological Engineering Jalan Raya Bandung
Combining geological surface data and geostatistical model for Enhanced Subsurface geological model M. Kurniawan Alfadli, Nanda Natasia, Iyan Haryanto Faculty of Geological Engineering Jalan Raya Bandung
Advances in Locally Varying Anisotropy With MDS
 Paper 102, CCG Annual Report 11, 2009 ( 2009) Advances in Locally Varying Anisotropy With MDS J.B. Boisvert and C. V. Deutsch Often, geology displays non-linear features such as veins, channels or folds/faults
Paper 102, CCG Annual Report 11, 2009 ( 2009) Advances in Locally Varying Anisotropy With MDS J.B. Boisvert and C. V. Deutsch Often, geology displays non-linear features such as veins, channels or folds/faults
A MultiGaussian Approach to Assess Block Grade Uncertainty
 A MultiGaussian Approach to Assess Block Grade Uncertainty Julián M. Ortiz 1, Oy Leuangthong 2, and Clayton V. Deutsch 2 1 Department of Mining Engineering, University of Chile 2 Department of Civil &
A MultiGaussian Approach to Assess Block Grade Uncertainty Julián M. Ortiz 1, Oy Leuangthong 2, and Clayton V. Deutsch 2 1 Department of Mining Engineering, University of Chile 2 Department of Civil &
Large Scale Modeling by Bayesian Updating Techniques
 Large Scale Modeling by Bayesian Updating Techniques Weishan Ren Centre for Computational Geostatistics Department of Civil and Environmental Engineering University of Alberta Large scale models are useful
Large Scale Modeling by Bayesian Updating Techniques Weishan Ren Centre for Computational Geostatistics Department of Civil and Environmental Engineering University of Alberta Large scale models are useful
Entropy of Gaussian Random Functions and Consequences in Geostatistics
 Entropy of Gaussian Random Functions and Consequences in Geostatistics Paula Larrondo (larrondo@ualberta.ca) Department of Civil & Environmental Engineering University of Alberta Abstract Sequential Gaussian
Entropy of Gaussian Random Functions and Consequences in Geostatistics Paula Larrondo (larrondo@ualberta.ca) Department of Civil & Environmental Engineering University of Alberta Abstract Sequential Gaussian
Advanced analysis and modelling tools for spatial environmental data. Case study: indoor radon data in Switzerland
 EnviroInfo 2004 (Geneva) Sh@ring EnviroInfo 2004 Advanced analysis and modelling tools for spatial environmental data. Case study: indoor radon data in Switzerland Mikhail Kanevski 1, Michel Maignan 1
EnviroInfo 2004 (Geneva) Sh@ring EnviroInfo 2004 Advanced analysis and modelling tools for spatial environmental data. Case study: indoor radon data in Switzerland Mikhail Kanevski 1, Michel Maignan 1
Stanford Exploration Project, Report 115, May 22, 2004, pages
 Stanford Exploration Project, Report 115, May 22, 2004, pages 249 264 248 Stanford Exploration Project, Report 115, May 22, 2004, pages 249 264 First-order lateral interval velocity estimates without picking
Stanford Exploration Project, Report 115, May 22, 2004, pages 249 264 248 Stanford Exploration Project, Report 115, May 22, 2004, pages 249 264 First-order lateral interval velocity estimates without picking
Conditional Distribution Fitting of High Dimensional Stationary Data
 Conditional Distribution Fitting of High Dimensional Stationary Data Miguel Cuba and Oy Leuangthong The second order stationary assumption implies the spatial variability defined by the variogram is constant
Conditional Distribution Fitting of High Dimensional Stationary Data Miguel Cuba and Oy Leuangthong The second order stationary assumption implies the spatial variability defined by the variogram is constant
Estimating a pseudounitary operator for velocity-stack inversion
 Stanford Exploration Project, Report 82, May 11, 2001, pages 1 77 Estimating a pseudounitary operator for velocity-stack inversion David E. Lumley 1 ABSTRACT I estimate a pseudounitary operator for enhancing
Stanford Exploration Project, Report 82, May 11, 2001, pages 1 77 Estimating a pseudounitary operator for velocity-stack inversion David E. Lumley 1 ABSTRACT I estimate a pseudounitary operator for enhancing
Linear inverse Gaussian theory and geostatistics a tomography example København Ø,
 Linear inverse Gaussian theory and geostatistics a tomography example Thomas Mejer Hansen 1, ndre Journel 2, lbert Tarantola 3 and Klaus Mosegaard 1 1 Niels Bohr Institute, University of Copenhagen, Juliane
Linear inverse Gaussian theory and geostatistics a tomography example Thomas Mejer Hansen 1, ndre Journel 2, lbert Tarantola 3 and Klaus Mosegaard 1 1 Niels Bohr Institute, University of Copenhagen, Juliane
Seismic tomography with co-located soft data
 Seismic tomography with co-located soft data Mohammad Maysami and Robert G. Clapp ABSTRACT There is a wide range of uncertainties present in seismic data. Limited subsurface illumination is also common,
Seismic tomography with co-located soft data Mohammad Maysami and Robert G. Clapp ABSTRACT There is a wide range of uncertainties present in seismic data. Limited subsurface illumination is also common,
Correcting Variogram Reproduction of P-Field Simulation
 Correcting Variogram Reproduction of P-Field Simulation Julián M. Ortiz (jmo1@ualberta.ca) Department of Civil & Environmental Engineering University of Alberta Abstract Probability field simulation is
Correcting Variogram Reproduction of P-Field Simulation Julián M. Ortiz (jmo1@ualberta.ca) Department of Civil & Environmental Engineering University of Alberta Abstract Probability field simulation is
Reservoir Uncertainty Calculation by Large Scale Modeling
 Reservoir Uncertainty Calculation by Large Scale Modeling Naeem Alshehri and Clayton V. Deutsch It is important to have a good estimate of the amount of oil or gas in a reservoir. The uncertainty in reserve
Reservoir Uncertainty Calculation by Large Scale Modeling Naeem Alshehri and Clayton V. Deutsch It is important to have a good estimate of the amount of oil or gas in a reservoir. The uncertainty in reserve
Trace balancing with PEF plane annihilators
 Stanford Exploration Project, Report 84, May 9, 2001, pages 1 333 Short Note Trace balancing with PEF plane annihilators Sean Crawley 1 INTRODUCTION Land seismic data often shows large variations in energy
Stanford Exploration Project, Report 84, May 9, 2001, pages 1 333 Short Note Trace balancing with PEF plane annihilators Sean Crawley 1 INTRODUCTION Land seismic data often shows large variations in energy
Porosity prediction using cokriging with multiple secondary datasets
 Cokriging with Multiple Attributes Porosity prediction using cokriging with multiple secondary datasets Hong Xu, Jian Sun, Brian Russell, Kris Innanen ABSTRACT The prediction of porosity is essential for
Cokriging with Multiple Attributes Porosity prediction using cokriging with multiple secondary datasets Hong Xu, Jian Sun, Brian Russell, Kris Innanen ABSTRACT The prediction of porosity is essential for
ENGRG Introduction to GIS
 ENGRG 59910 Introduction to GIS Michael Piasecki October 13, 2017 Lecture 06: Spatial Analysis Outline Today Concepts What is spatial interpolation Why is necessary Sample of interpolation (size and pattern)
ENGRG 59910 Introduction to GIS Michael Piasecki October 13, 2017 Lecture 06: Spatial Analysis Outline Today Concepts What is spatial interpolation Why is necessary Sample of interpolation (size and pattern)
Stolt residual migration for converted waves
 Stanford Exploration Project, Report 11, September 18, 1, pages 1 6 Stolt residual migration for converted waves Daniel Rosales, Paul Sava, and Biondo Biondi 1 ABSTRACT P S velocity analysis is a new frontier
Stanford Exploration Project, Report 11, September 18, 1, pages 1 6 Stolt residual migration for converted waves Daniel Rosales, Paul Sava, and Biondo Biondi 1 ABSTRACT P S velocity analysis is a new frontier
Building Blocks for Direct Sequential Simulation on Unstructured Grids
 Building Blocks for Direct Sequential Simulation on Unstructured Grids Abstract M. J. Pyrcz (mpyrcz@ualberta.ca) and C. V. Deutsch (cdeutsch@ualberta.ca) University of Alberta, Edmonton, Alberta, CANADA
Building Blocks for Direct Sequential Simulation on Unstructured Grids Abstract M. J. Pyrcz (mpyrcz@ualberta.ca) and C. V. Deutsch (cdeutsch@ualberta.ca) University of Alberta, Edmonton, Alberta, CANADA
Optimizing Thresholds in Truncated Pluri-Gaussian Simulation
 Optimizing Thresholds in Truncated Pluri-Gaussian Simulation Samaneh Sadeghi and Jeff B. Boisvert Truncated pluri-gaussian simulation (TPGS) is an extension of truncated Gaussian simulation. This method
Optimizing Thresholds in Truncated Pluri-Gaussian Simulation Samaneh Sadeghi and Jeff B. Boisvert Truncated pluri-gaussian simulation (TPGS) is an extension of truncated Gaussian simulation. This method
Implicit 3-D depth migration by wavefield extrapolation with helical boundary conditions
 Stanford Exploration Project, Report 97, July 8, 1998, pages 1 13 Implicit 3-D depth migration by wavefield extrapolation with helical boundary conditions James Rickett, Jon Claerbout, and Sergey Fomel
Stanford Exploration Project, Report 97, July 8, 1998, pages 1 13 Implicit 3-D depth migration by wavefield extrapolation with helical boundary conditions James Rickett, Jon Claerbout, and Sergey Fomel
Adaptive multiple subtraction using regularized nonstationary regression
 GEOPHSICS, VOL. 74, NO. 1 JANUAR-FEBRUAR 29 ; P. V25 V33, 17 FIGS. 1.119/1.343447 Adaptive multiple subtraction using regularized nonstationary regression Sergey Fomel 1 ABSTRACT Stationary regression
GEOPHSICS, VOL. 74, NO. 1 JANUAR-FEBRUAR 29 ; P. V25 V33, 17 FIGS. 1.119/1.343447 Adaptive multiple subtraction using regularized nonstationary regression Sergey Fomel 1 ABSTRACT Stationary regression
P S-wave polarity reversal in angle domain common-image gathers
 Stanford Exploration Project, Report 108, April 29, 2001, pages 1?? P S-wave polarity reversal in angle domain common-image gathers Daniel Rosales and James Rickett 1 ABSTRACT The change in the reflection
Stanford Exploration Project, Report 108, April 29, 2001, pages 1?? P S-wave polarity reversal in angle domain common-image gathers Daniel Rosales and James Rickett 1 ABSTRACT The change in the reflection
Automatic Determination of Uncertainty versus Data Density
 Automatic Determination of Uncertainty versus Data Density Brandon Wilde and Clayton V. Deutsch It is useful to know how various measures of uncertainty respond to changes in data density. Calculating
Automatic Determination of Uncertainty versus Data Density Brandon Wilde and Clayton V. Deutsch It is useful to know how various measures of uncertainty respond to changes in data density. Calculating
Data examples of logarithm Fourier domain bidirectional deconvolution
 Data examples of logarithm Fourier domain bidirectional deconvolution Qiang Fu and Yi Shen and Jon Claerbout ABSTRACT Time domain bidirectional deconvolution methods show a very promising perspective on
Data examples of logarithm Fourier domain bidirectional deconvolution Qiang Fu and Yi Shen and Jon Claerbout ABSTRACT Time domain bidirectional deconvolution methods show a very promising perspective on
Stanford Exploration Project, Report 111, June 9, 2002, pages INTRODUCTION FROM THE FILTERING TO THE SUBTRACTION OF NOISE
 Stanford Exploration Project, Report 111, June 9, 2002, pages 199 204 Short Note Theoretical aspects of noise attenuation Antoine Guitton 1 INTRODUCTION In Guitton (2001) I presented an efficient algorithm
Stanford Exploration Project, Report 111, June 9, 2002, pages 199 204 Short Note Theoretical aspects of noise attenuation Antoine Guitton 1 INTRODUCTION In Guitton (2001) I presented an efficient algorithm
PRODUCING PROBABILITY MAPS TO ASSESS RISK OF EXCEEDING CRITICAL THRESHOLD VALUE OF SOIL EC USING GEOSTATISTICAL APPROACH
 PRODUCING PROBABILITY MAPS TO ASSESS RISK OF EXCEEDING CRITICAL THRESHOLD VALUE OF SOIL EC USING GEOSTATISTICAL APPROACH SURESH TRIPATHI Geostatistical Society of India Assumptions and Geostatistical Variogram
PRODUCING PROBABILITY MAPS TO ASSESS RISK OF EXCEEDING CRITICAL THRESHOLD VALUE OF SOIL EC USING GEOSTATISTICAL APPROACH SURESH TRIPATHI Geostatistical Society of India Assumptions and Geostatistical Variogram
7 Geostatistics. Figure 7.1 Focus of geostatistics
 7 Geostatistics 7.1 Introduction Geostatistics is the part of statistics that is concerned with geo-referenced data, i.e. data that are linked to spatial coordinates. To describe the spatial variation
7 Geostatistics 7.1 Introduction Geostatistics is the part of statistics that is concerned with geo-referenced data, i.e. data that are linked to spatial coordinates. To describe the spatial variation
Multiple horizons mapping: A better approach for maximizing the value of seismic data
 Multiple horizons mapping: A better approach for maximizing the value of seismic data Das Ujjal Kumar *, SG(S) ONGC Ltd., New Delhi, Deputed in Ministry of Petroleum and Natural Gas, Govt. of India Email:
Multiple horizons mapping: A better approach for maximizing the value of seismic data Das Ujjal Kumar *, SG(S) ONGC Ltd., New Delhi, Deputed in Ministry of Petroleum and Natural Gas, Govt. of India Email:
B008 COMPARISON OF METHODS FOR DOWNSCALING OF COARSE SCALE PERMEABILITY ESTIMATES
 1 B8 COMPARISON OF METHODS FOR DOWNSCALING OF COARSE SCALE PERMEABILITY ESTIMATES Alv-Arne Grimstad 1 and Trond Mannseth 1,2 1 RF-Rogaland Research 2 Now with CIPR - Centre for Integrated Petroleum Research,
1 B8 COMPARISON OF METHODS FOR DOWNSCALING OF COARSE SCALE PERMEABILITY ESTIMATES Alv-Arne Grimstad 1 and Trond Mannseth 1,2 1 RF-Rogaland Research 2 Now with CIPR - Centre for Integrated Petroleum Research,
Adaptive linear prediction filtering for random noise attenuation Mauricio D. Sacchi* and Mostafa Naghizadeh, University of Alberta
 Adaptive linear prediction filtering for random noise attenuation Mauricio D. Sacchi* and Mostafa Naghizadeh, University of Alberta SUMMARY We propose an algorithm to compute time and space variant prediction
Adaptive linear prediction filtering for random noise attenuation Mauricio D. Sacchi* and Mostafa Naghizadeh, University of Alberta SUMMARY We propose an algorithm to compute time and space variant prediction
Soil Moisture Modeling using Geostatistical Techniques at the O Neal Ecological Reserve, Idaho
 Final Report: Forecasting Rangeland Condition with GIS in Southeastern Idaho Soil Moisture Modeling using Geostatistical Techniques at the O Neal Ecological Reserve, Idaho Jacob T. Tibbitts, Idaho State
Final Report: Forecasting Rangeland Condition with GIS in Southeastern Idaho Soil Moisture Modeling using Geostatistical Techniques at the O Neal Ecological Reserve, Idaho Jacob T. Tibbitts, Idaho State
Stepwise Conditional Transformation in Estimation Mode. Clayton V. Deutsch
 Stepwise Conditional Transformation in Estimation Mode Clayton V. Deutsch Centre for Computational Geostatistics (CCG) Department of Civil and Environmental Engineering University of Alberta Stepwise Conditional
Stepwise Conditional Transformation in Estimation Mode Clayton V. Deutsch Centre for Computational Geostatistics (CCG) Department of Civil and Environmental Engineering University of Alberta Stepwise Conditional
Kriging in the Presence of LVA Using Dijkstra's Algorithm
 Kriging in the Presence of LVA Using Dijkstra's Algorithm Jeff Boisvert and Clayton V. Deutsch One concern with current geostatistical practice is the use of a stationary variogram to describe spatial
Kriging in the Presence of LVA Using Dijkstra's Algorithm Jeff Boisvert and Clayton V. Deutsch One concern with current geostatistical practice is the use of a stationary variogram to describe spatial
Iterative Methods for Solving A x = b
 Iterative Methods for Solving A x = b A good (free) online source for iterative methods for solving A x = b is given in the description of a set of iterative solvers called templates found at netlib: http
Iterative Methods for Solving A x = b A good (free) online source for iterative methods for solving A x = b is given in the description of a set of iterative solvers called templates found at netlib: http
Geostatistics for Seismic Data Integration in Earth Models
 2003 Distinguished Instructor Short Course Distinguished Instructor Series, No. 6 sponsored by the Society of Exploration Geophysicists European Association of Geoscientists & Engineers SUB Gottingen 7
2003 Distinguished Instructor Short Course Distinguished Instructor Series, No. 6 sponsored by the Society of Exploration Geophysicists European Association of Geoscientists & Engineers SUB Gottingen 7
A008 THE PROBABILITY PERTURBATION METHOD AN ALTERNATIVE TO A TRADITIONAL BAYESIAN APPROACH FOR SOLVING INVERSE PROBLEMS
 A008 THE PROAILITY PERTURATION METHOD AN ALTERNATIVE TO A TRADITIONAL AYESIAN APPROAH FOR SOLVING INVERSE PROLEMS Jef AERS Stanford University, Petroleum Engineering, Stanford A 94305-2220 USA Abstract
A008 THE PROAILITY PERTURATION METHOD AN ALTERNATIVE TO A TRADITIONAL AYESIAN APPROAH FOR SOLVING INVERSE PROLEMS Jef AERS Stanford University, Petroleum Engineering, Stanford A 94305-2220 USA Abstract
SPATIAL-TEMPORAL TECHNIQUES FOR PREDICTION AND COMPRESSION OF SOIL FERTILITY DATA
 SPATIAL-TEMPORAL TECHNIQUES FOR PREDICTION AND COMPRESSION OF SOIL FERTILITY DATA D. Pokrajac Center for Information Science and Technology Temple University Philadelphia, Pennsylvania A. Lazarevic Computer
SPATIAL-TEMPORAL TECHNIQUES FOR PREDICTION AND COMPRESSION OF SOIL FERTILITY DATA D. Pokrajac Center for Information Science and Technology Temple University Philadelphia, Pennsylvania A. Lazarevic Computer
arxiv: v1 [physics.geo-ph] 23 Dec 2017
![arxiv: v1 [physics.geo-ph] 23 Dec 2017](/thumbs/84/89718089.jpg "arxiv: v1 [physics.geo-ph] 23 Dec 2017") Statics Preserving Sparse Radon Transform Nasser Kazemi, Department of Physics, University of Alberta, kazemino@ualberta.ca Summary arxiv:7.087v [physics.geo-ph] 3 Dec 07 This paper develops a Statics
Statics Preserving Sparse Radon Transform Nasser Kazemi, Department of Physics, University of Alberta, kazemino@ualberta.ca Summary arxiv:7.087v [physics.geo-ph] 3 Dec 07 This paper develops a Statics
Lecture 9: Introduction to Kriging
 Lecture 9: Introduction to Kriging Math 586 Beginning remarks Kriging is a commonly used method of interpolation (prediction) for spatial data. The data are a set of observations of some variable(s) of
Lecture 9: Introduction to Kriging Math 586 Beginning remarks Kriging is a commonly used method of interpolation (prediction) for spatial data. The data are a set of observations of some variable(s) of
Acceptable Ergodic Fluctuations and Simulation of Skewed Distributions
 Acceptable Ergodic Fluctuations and Simulation of Skewed Distributions Oy Leuangthong, Jason McLennan and Clayton V. Deutsch Centre for Computational Geostatistics Department of Civil & Environmental Engineering
Acceptable Ergodic Fluctuations and Simulation of Skewed Distributions Oy Leuangthong, Jason McLennan and Clayton V. Deutsch Centre for Computational Geostatistics Department of Civil & Environmental Engineering
Interval anisotropic parameters estimation in a least squares sense Case histories from West Africa
 P-263 Summary Interval anisotropic parameters estimation in a least squares sense Patrizia Cibin*, Maurizio Ferla Eni E&P Division (Milano, Italy), Emmanuel Spadavecchia - Politecnico di Milano (Milano,
P-263 Summary Interval anisotropic parameters estimation in a least squares sense Patrizia Cibin*, Maurizio Ferla Eni E&P Division (Milano, Italy), Emmanuel Spadavecchia - Politecnico di Milano (Milano,
23855 Rock Physics Constraints on Seismic Inversion
 23855 Rock Physics Constraints on Seismic Inversion M. Sams* (Ikon Science Ltd) & D. Saussus (Ikon Science) SUMMARY Seismic data are bandlimited, offset limited and noisy. Consequently interpretation of
23855 Rock Physics Constraints on Seismic Inversion M. Sams* (Ikon Science Ltd) & D. Saussus (Ikon Science) SUMMARY Seismic data are bandlimited, offset limited and noisy. Consequently interpretation of
Quantifying uncertainty of geological 3D layer models, constructed with a-priori
 Quantifying uncertainty of geological 3D layer models, constructed with a-priori geological expertise Jan Gunnink, Denise Maljers 2 and Jan Hummelman 2, TNO Built Environment and Geosciences Geological
Quantifying uncertainty of geological 3D layer models, constructed with a-priori geological expertise Jan Gunnink, Denise Maljers 2 and Jan Hummelman 2, TNO Built Environment and Geosciences Geological
Conditional Standardization: A Multivariate Transformation for the Removal of Non-linear and Heteroscedastic Features
 Conditional Standardization: A Multivariate Transformation for the Removal of Non-linear and Heteroscedastic Features Ryan M. Barnett Reproduction of complex multivariate features, such as non-linearity,
Conditional Standardization: A Multivariate Transformation for the Removal of Non-linear and Heteroscedastic Features Ryan M. Barnett Reproduction of complex multivariate features, such as non-linearity,
IJMGE Int. J. Min. & Geo-Eng. Vol.49, No.1, June 2015, pp
 IJMGE Int. J. Min. & Geo-Eng. Vol.49, No.1, June 2015, pp.131-142 Joint Bayesian Stochastic Inversion of Well Logs and Seismic Data for Volumetric Uncertainty Analysis Moslem Moradi 1, Omid Asghari 1,
IJMGE Int. J. Min. & Geo-Eng. Vol.49, No.1, June 2015, pp.131-142 Joint Bayesian Stochastic Inversion of Well Logs and Seismic Data for Volumetric Uncertainty Analysis Moslem Moradi 1, Omid Asghari 1,
Transiogram: A spatial relationship measure for categorical data
 International Journal of Geographical Information Science Vol. 20, No. 6, July 2006, 693 699 Technical Note Transiogram: A spatial relationship measure for categorical data WEIDONG LI* Department of Geography,
International Journal of Geographical Information Science Vol. 20, No. 6, July 2006, 693 699 Technical Note Transiogram: A spatial relationship measure for categorical data WEIDONG LI* Department of Geography,
Time to Depth Conversion and Uncertainty Characterization for SAGD Base of Pay in the McMurray Formation, Alberta, Canada*
 Time to Depth Conversion and Uncertainty Characterization for SAGD Base of Pay in the McMurray Formation, Alberta, Canada* Amir H. Hosseini 1, Hong Feng 1, Abu Yousuf 1, and Tony Kay 1 Search and Discovery
Time to Depth Conversion and Uncertainty Characterization for SAGD Base of Pay in the McMurray Formation, Alberta, Canada* Amir H. Hosseini 1, Hong Feng 1, Abu Yousuf 1, and Tony Kay 1 Search and Discovery
SUMMARY ANGLE DECOMPOSITION INTRODUCTION. A conventional cross-correlation imaging condition for wave-equation migration is (Claerbout, 1985)
") Comparison of angle decomposition methods for wave-equation migration Natalya Patrikeeva and Paul Sava, Center for Wave Phenomena, Colorado School of Mines SUMMARY Angle domain common image gathers offer
Comparison of angle decomposition methods for wave-equation migration Natalya Patrikeeva and Paul Sava, Center for Wave Phenomena, Colorado School of Mines SUMMARY Angle domain common image gathers offer
Time-lapse filtering and improved repeatability with automatic factorial co-kriging. Thierry Coléou CGG Reservoir Services Massy
 Time-lapse filtering and improved repeatability with automatic factorial co-kriging. Thierry Coléou CGG Reservoir Services Massy 1 Outline Introduction Variogram and Autocorrelation Factorial Kriging Factorial
Time-lapse filtering and improved repeatability with automatic factorial co-kriging. Thierry Coléou CGG Reservoir Services Massy 1 Outline Introduction Variogram and Autocorrelation Factorial Kriging Factorial
Latin Hypercube Sampling with Multidimensional Uniformity
 Latin Hypercube Sampling with Multidimensional Uniformity Jared L. Deutsch and Clayton V. Deutsch Complex geostatistical models can only be realized a limited number of times due to large computational
Latin Hypercube Sampling with Multidimensional Uniformity Jared L. Deutsch and Clayton V. Deutsch Complex geostatistical models can only be realized a limited number of times due to large computational
What is Non-Linear Estimation?
 What is Non-Linear Estimation? You may have heard the terms Linear Estimation and Non-Linear Estimation used in relation to spatial estimation of a resource variable and perhaps wondered exactly what they
What is Non-Linear Estimation? You may have heard the terms Linear Estimation and Non-Linear Estimation used in relation to spatial estimation of a resource variable and perhaps wondered exactly what they
Improving the quality of Velocity Models and Seismic Images. Alice Chanvin-Laaouissi
 Improving the quality of Velocity Models and Seismic Images Alice Chanvin-Laaouissi 2015, 2015, PARADIGM. PARADIGM. ALL RIGHTS ALL RIGHTS RESERVED. RESERVED. Velocity Volumes Challenges 1. Define sealed
Improving the quality of Velocity Models and Seismic Images Alice Chanvin-Laaouissi 2015, 2015, PARADIGM. PARADIGM. ALL RIGHTS ALL RIGHTS RESERVED. RESERVED. Velocity Volumes Challenges 1. Define sealed
Applications of Randomized Methods for Decomposing and Simulating from Large Covariance Matrices
 Applications of Randomized Methods for Decomposing and Simulating from Large Covariance Matrices Vahid Dehdari and Clayton V. Deutsch Geostatistical modeling involves many variables and many locations.
Applications of Randomized Methods for Decomposing and Simulating from Large Covariance Matrices Vahid Dehdari and Clayton V. Deutsch Geostatistical modeling involves many variables and many locations.
Missing Data Interpolation with Gaussian Pyramids
 Stanford Exploration Project, Report 124, April 4, 2006, pages 33?? Missing Data Interpolation with Gaussian Pyramids Satyakee Sen ABSTRACT I describe a technique for interpolation of missing data in which
Stanford Exploration Project, Report 124, April 4, 2006, pages 33?? Missing Data Interpolation with Gaussian Pyramids Satyakee Sen ABSTRACT I describe a technique for interpolation of missing data in which
Subsalt imaging by common-azimuth migration
 Stanford Exploration Project, Report 100, April 20, 1999, pages 113 125 Subsalt imaging by common-azimuth migration Biondo Biondi 1 keywords: migration, common-azimuth, wave-equation ABSTRACT The comparison
Stanford Exploration Project, Report 100, April 20, 1999, pages 113 125 Subsalt imaging by common-azimuth migration Biondo Biondi 1 keywords: migration, common-azimuth, wave-equation ABSTRACT The comparison
Lecture 3. Linear Regression II Bastian Leibe RWTH Aachen
 Advanced Machine Learning Lecture 3 Linear Regression II 02.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de This Lecture: Advanced Machine Learning Regression
Advanced Machine Learning Lecture 3 Linear Regression II 02.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de This Lecture: Advanced Machine Learning Regression
Residual Statics using CSP gathers
 Residual Statics using CSP gathers Xinxiang Li and John C. Bancroft ABSTRACT All the conventional methods for residual statics analysis require normal moveout (NMO) correction applied on the seismic data.
Residual Statics using CSP gathers Xinxiang Li and John C. Bancroft ABSTRACT All the conventional methods for residual statics analysis require normal moveout (NMO) correction applied on the seismic data.
Content. A new algorithm combining geostatistics with the surrogate data approach. Problem. Motivation. Cloud structure - nonlinear
 A new algorithm combining geostatistics with the surrogate data approach Victor Venema, Ralf Lindau, Tamas Varnai and Clemens Simmer Motivation Content Constrained simulation Combing surrogate and kriging
A new algorithm combining geostatistics with the surrogate data approach Victor Venema, Ralf Lindau, Tamas Varnai and Clemens Simmer Motivation Content Constrained simulation Combing surrogate and kriging
GSLIB Geostatistical Software Library and User's Guide
 GSLIB Geostatistical Software Library and User's Guide Second Edition Clayton V. Deutsch Department of Petroleum Engineering Stanford University Andre G. Journel Department of Geological and Environmental
GSLIB Geostatistical Software Library and User's Guide Second Edition Clayton V. Deutsch Department of Petroleum Engineering Stanford University Andre G. Journel Department of Geological and Environmental
Sequential Simulations of Mixed Discrete-Continuous Properties: Sequential Gaussian Mixture Simulation
 Sequential Simulations of Mixed Discrete-Continuous Properties: Sequential Gaussian Mixture Simulation Dario Grana, Tapan Mukerji, Laura Dovera, and Ernesto Della Rossa Abstract We present here a method
Sequential Simulations of Mixed Discrete-Continuous Properties: Sequential Gaussian Mixture Simulation Dario Grana, Tapan Mukerji, Laura Dovera, and Ernesto Della Rossa Abstract We present here a method
3D geostatistical porosity modelling: A case study at the Saint-Flavien CO 2 storage project
 3D geostatistical porosity modelling: A case study at the Saint-Flavien CO 2 storage project Maxime Claprood Institut national de la recherche scientifique, Québec, Canada Earth Modelling 2013 October
3D geostatistical porosity modelling: A case study at the Saint-Flavien CO 2 storage project Maxime Claprood Institut national de la recherche scientifique, Québec, Canada Earth Modelling 2013 October
Multiple-Point Geostatistics: from Theory to Practice Sebastien Strebelle 1
 Multiple-Point Geostatistics: from Theory to Practice Sebastien Strebelle 1 Abstract The limitations of variogram-based simulation programs to model complex, yet fairly common, geological elements, e.g.
Multiple-Point Geostatistics: from Theory to Practice Sebastien Strebelle 1 Abstract The limitations of variogram-based simulation programs to model complex, yet fairly common, geological elements, e.g.
A Southern North Sea Multi-Survey presdm using Hybrid Gridded Tomography
 A Southern North Sea Multi-Survey presdm using Hybrid Gridded Tomography Ian Jones* GX Technology, Egham, United Kingdom ijones@gxt.com Emma Evans and Darren Judd GX Technology, Egham, United Kingdom and
A Southern North Sea Multi-Survey presdm using Hybrid Gridded Tomography Ian Jones* GX Technology, Egham, United Kingdom ijones@gxt.com Emma Evans and Darren Judd GX Technology, Egham, United Kingdom and
Amplitude preserving AMO from true amplitude DMO and inverse DMO
 Stanford Exploration Project, Report 84, May 9, 001, pages 1 167 Amplitude preserving AMO from true amplitude DMO and inverse DMO Nizar Chemingui and Biondo Biondi 1 ABSTRACT Starting from the definition
Stanford Exploration Project, Report 84, May 9, 001, pages 1 167 Amplitude preserving AMO from true amplitude DMO and inverse DMO Nizar Chemingui and Biondo Biondi 1 ABSTRACT Starting from the definition
Investigating fault shadows in a normally faulted geology
 Investigating fault shadows in a normally faulted geology Sitamai Ajiduah* and Gary Margrave CREWES, University of Calgary, sajiduah@ucalgary.ca Summary Fault shadow poses a potential development risk
Investigating fault shadows in a normally faulted geology Sitamai Ajiduah* and Gary Margrave CREWES, University of Calgary, sajiduah@ucalgary.ca Summary Fault shadow poses a potential development risk
Regularizing inverse problems. Damping and smoothing and choosing...
 Regularizing inverse problems Damping and smoothing and choosing... 141 Regularization The idea behind SVD is to limit the degree of freedom in the model and fit the data to an acceptable level. Retain
Regularizing inverse problems Damping and smoothing and choosing... 141 Regularization The idea behind SVD is to limit the degree of freedom in the model and fit the data to an acceptable level. Retain
3.4 Linear Least-Squares Filter
 X(n) = [x(1), x(2),..., x(n)] T 1 3.4 Linear Least-Squares Filter Two characteristics of linear least-squares filter: 1. The filter is built around a single linear neuron. 2. The cost function is the sum
X(n) = [x(1), x(2),..., x(n)] T 1 3.4 Linear Least-Squares Filter Two characteristics of linear least-squares filter: 1. The filter is built around a single linear neuron. 2. The cost function is the sum
Comparison between least-squares reverse time migration and full-waveform inversion
 Comparison between least-squares reverse time migration and full-waveform inversion Lei Yang, Daniel O. Trad and Wenyong Pan Summary The inverse problem in exploration geophysics usually consists of two
Comparison between least-squares reverse time migration and full-waveform inversion Lei Yang, Daniel O. Trad and Wenyong Pan Summary The inverse problem in exploration geophysics usually consists of two
We LHR3 04 Realistic Uncertainty Quantification in Geostatistical Seismic Reservoir Characterization
 We LHR3 04 Realistic Uncertainty Quantification in Geostatistical Seismic Reservoir Characterization A. Moradi Tehrani* (CGG), A. Stallone (Roma Tre University), R. Bornard (CGG) & S. Boudon (CGG) SUMMARY
We LHR3 04 Realistic Uncertainty Quantification in Geostatistical Seismic Reservoir Characterization A. Moradi Tehrani* (CGG), A. Stallone (Roma Tre University), R. Bornard (CGG) & S. Boudon (CGG) SUMMARY
The Proportional Effect of Spatial Variables
 The Proportional Effect of Spatial Variables J. G. Manchuk, O. Leuangthong and C. V. Deutsch Centre for Computational Geostatistics, Department of Civil and Environmental Engineering University of Alberta
The Proportional Effect of Spatial Variables J. G. Manchuk, O. Leuangthong and C. V. Deutsch Centre for Computational Geostatistics, Department of Civil and Environmental Engineering University of Alberta
Spatiotemporal Analysis of Environmental Radiation in Korea
 WM 0 Conference, February 25 - March, 200, Tucson, AZ Spatiotemporal Analysis of Environmental Radiation in Korea J.Y. Kim, B.C. Lee FNC Technology Co., Ltd. Main Bldg. 56, Seoul National University Research
WM 0 Conference, February 25 - March, 200, Tucson, AZ Spatiotemporal Analysis of Environmental Radiation in Korea J.Y. Kim, B.C. Lee FNC Technology Co., Ltd. Main Bldg. 56, Seoul National University Research
Chapter 7. Seismic imaging. 7.1 Assumptions and vocabulary
 Chapter 7 Seismic imaging Much of the imaging procedure was already described in the previous chapters. An image, or a gradient update, is formed from the imaging condition by means of the incident and
Chapter 7 Seismic imaging Much of the imaging procedure was already described in the previous chapters. An image, or a gradient update, is formed from the imaging condition by means of the incident and
COLLOCATED CO-SIMULATION USING PROBABILITY AGGREGATION
 COLLOCATED CO-SIMULATION USING PROBABILITY AGGREGATION G. MARIETHOZ, PH. RENARD, R. FROIDEVAUX 2. CHYN, University of Neuchâtel, rue Emile Argand, CH - 2009 Neuchâtel, Switzerland 2 FSS Consultants, 9,
COLLOCATED CO-SIMULATION USING PROBABILITY AGGREGATION G. MARIETHOZ, PH. RENARD, R. FROIDEVAUX 2. CHYN, University of Neuchâtel, rue Emile Argand, CH - 2009 Neuchâtel, Switzerland 2 FSS Consultants, 9,
Consistent Downscaling of Seismic Inversions to Cornerpoint Flow Models SPE
 Consistent Downscaling of Seismic Inversions to Cornerpoint Flow Models SPE 103268 Subhash Kalla LSU Christopher D. White LSU James S. Gunning CSIRO Michael E. Glinsky BHP-Billiton Contents Method overview
Consistent Downscaling of Seismic Inversions to Cornerpoint Flow Models SPE 103268 Subhash Kalla LSU Christopher D. White LSU James S. Gunning CSIRO Michael E. Glinsky BHP-Billiton Contents Method overview
Statistical Rock Physics
 Statistical - Introduction Book review 3.1-3.3 Min Sun March. 13, 2009 Outline. What is Statistical. Why we need Statistical. How Statistical works Statistical Rock physics Information theory Statistics
Statistical - Introduction Book review 3.1-3.3 Min Sun March. 13, 2009 Outline. What is Statistical. Why we need Statistical. How Statistical works Statistical Rock physics Information theory Statistics
Is there still room for new developments in geostatistics?
 Is there still room for new developments in geostatistics? Jean-Paul Chilès MINES ParisTech, Fontainebleau, France, IAMG 34th IGC, Brisbane, 8 August 2012 Matheron: books and monographs 1962-1963: Treatise
Is there still room for new developments in geostatistics? Jean-Paul Chilès MINES ParisTech, Fontainebleau, France, IAMG 34th IGC, Brisbane, 8 August 2012 Matheron: books and monographs 1962-1963: Treatise
Bindel, Fall 2011 Intro to Scientific Computing (CS 3220) Week 6: Monday, Mar 7. e k+1 = 1 f (ξ k ) 2 f (x k ) e2 k.
 Week 6: Monday, Mar 7. e k+1 = 1 f (ξ k ) 2 f (x k ) e2 k.") Problem du jour Week 6: Monday, Mar 7 Show that for any initial guess x 0 > 0, Newton iteration on f(x) = x 2 a produces a decreasing sequence x 1 x 2... x n a. What is the rate of convergence if a = 0?
Problem du jour Week 6: Monday, Mar 7 Show that for any initial guess x 0 > 0, Newton iteration on f(x) = x 2 a produces a decreasing sequence x 1 x 2... x n a. What is the rate of convergence if a = 0?
Concepts and Applications of Kriging. Eric Krause
 Concepts and Applications of Kriging Eric Krause Sessions of note Tuesday ArcGIS Geostatistical Analyst - An Introduction 8:30-9:45 Room 14 A Concepts and Applications of Kriging 10:15-11:30 Room 15 A
Concepts and Applications of Kriging Eric Krause Sessions of note Tuesday ArcGIS Geostatistical Analyst - An Introduction 8:30-9:45 Room 14 A Concepts and Applications of Kriging 10:15-11:30 Room 15 A
Stochastic vs Deterministic Pre-stack Inversion Methods. Brian Russell
 Stochastic vs Deterministic Pre-stack Inversion Methods Brian Russell Introduction Seismic reservoir analysis techniques utilize the fact that seismic amplitudes contain information about the geological
Stochastic vs Deterministic Pre-stack Inversion Methods Brian Russell Introduction Seismic reservoir analysis techniques utilize the fact that seismic amplitudes contain information about the geological
COLLOCATED CO-SIMULATION USING PROBABILITY AGGREGATION
 COLLOCATED CO-SIMULATION USING PROBABILITY AGGREGATION G. MARIETHOZ, PH. RENARD, R. FROIDEVAUX 2. CHYN, University of Neuchâtel, rue Emile Argand, CH - 2009 Neuchâtel, Switzerland 2 FSS Consultants, 9,
COLLOCATED CO-SIMULATION USING PROBABILITY AGGREGATION G. MARIETHOZ, PH. RENARD, R. FROIDEVAUX 2. CHYN, University of Neuchâtel, rue Emile Argand, CH - 2009 Neuchâtel, Switzerland 2 FSS Consultants, 9,
 5.1 2D example 59 Figure 5.1: Parabolic velocity field in a straight two-dimensional pipe. Figure 5.2: Concentration on the input boundary of the pipe. The vertical axis corresponds to r 2 -coordinate,
5.1 2D example 59 Figure 5.1: Parabolic velocity field in a straight two-dimensional pipe. Figure 5.2: Concentration on the input boundary of the pipe. The vertical axis corresponds to r 2 -coordinate,
Lecture: Adaptive Filtering
 ECE 830 Spring 2013 Statistical Signal Processing instructors: K. Jamieson and R. Nowak Lecture: Adaptive Filtering Adaptive filters are commonly used for online filtering of signals. The goal is to estimate
ECE 830 Spring 2013 Statistical Signal Processing instructors: K. Jamieson and R. Nowak Lecture: Adaptive Filtering Adaptive filters are commonly used for online filtering of signals. The goal is to estimate
Linear smoother. ŷ = S y. where s ij = s ij (x) e.g. s ij = diag(l i (x))
 e.g. s ij = diag(l i (x))") Linear smoother ŷ = S y where s ij = s ij (x) e.g. s ij = diag(l i (x)) 2 Online Learning: LMS and Perceptrons Partially adapted from slides by Ryan Gabbard and Mitch Marcus (and lots original slides by
Linear smoother ŷ = S y where s ij = s ij (x) e.g. s ij = diag(l i (x)) 2 Online Learning: LMS and Perceptrons Partially adapted from slides by Ryan Gabbard and Mitch Marcus (and lots original slides by
Mapping Precipitation in Switzerland with Ordinary and Indicator Kriging
 Journal of Geographic Information and Decision Analysis, vol. 2, no. 2, pp. 65-76, 1998 Mapping Precipitation in Switzerland with Ordinary and Indicator Kriging Peter M. Atkinson Department of Geography,
Journal of Geographic Information and Decision Analysis, vol. 2, no. 2, pp. 65-76, 1998 Mapping Precipitation in Switzerland with Ordinary and Indicator Kriging Peter M. Atkinson Department of Geography,
Getting Started with Communications Engineering
 1 Linear algebra is the algebra of linear equations: the term linear being used in the same sense as in linear functions, such as: which is the equation of a straight line. y ax c (0.1) Of course, if we
1 Linear algebra is the algebra of linear equations: the term linear being used in the same sense as in linear functions, such as: which is the equation of a straight line. y ax c (0.1) Of course, if we
SeisLink Velocity. Key Technologies. Time-to-Depth Conversion
 Velocity Calibrated Seismic Imaging and Interpretation Accurate Solution for Prospect Depth, Size & Geometry Accurate Time-to-Depth Conversion was founded to provide geologically feasible solutions for
Velocity Calibrated Seismic Imaging and Interpretation Accurate Solution for Prospect Depth, Size & Geometry Accurate Time-to-Depth Conversion was founded to provide geologically feasible solutions for
Comparison of Methods for Deriving a Digital Elevation Model from Contours and Modelling of the Associated Uncertainty
 Comparison of Methods for Deriving a Digital Elevation Model from Contours and Modelling of the Associated Uncertainty Anicet Sindayihebura 1, Marc Van Meirvenne 1 and Stanislas Nsabimana 2 1 Department
Comparison of Methods for Deriving a Digital Elevation Model from Contours and Modelling of the Associated Uncertainty Anicet Sindayihebura 1, Marc Van Meirvenne 1 and Stanislas Nsabimana 2 1 Department
Exploring the World of Ordinary Kriging. Dennis J. J. Walvoort. Wageningen University & Research Center Wageningen, The Netherlands
 Exploring the World of Ordinary Kriging Wageningen University & Research Center Wageningen, The Netherlands July 2004 (version 0.2) What is? What is it about? Potential Users a computer program for exploring
Exploring the World of Ordinary Kriging Wageningen University & Research Center Wageningen, The Netherlands July 2004 (version 0.2) What is? What is it about? Potential Users a computer program for exploring