Prestress stability. Lecture VI. Session on Granular Matter Institut Henri Poincaré. R. Connelly Cornell University Department of Mathematics
|
|
|
- Bernadette Singleton
- 5 years ago
- Views:
Transcription
1 Prestress stability Lecture VI Session on Granular Matter Institut Henri Poincaré R. Connelly Cornell University Department of Mathematics 1
2 Potential functions How is the stability of a structure determined when it is statically indeterminant or even not statically rigid? 2
3 Potential functions How is the stability of a structure determined when it is statically indeterminant or even not statically rigid? Think of each member as a spring at rest (a bar), in tension (a cable), or in compression (a strut). In the spirit of Hooke s Law define an energy function as follows: 3
4 Member potentials For each member {i,j} define (or determine) E ij (x) its potential at length x 1/2. So the total energy for any configuration q=(q 1, q 2, q n ) in E d is E(q)=S i<j E ij ( q i -q j 2 ). The E ij functions are chosen (or computed) with respect to a fixed configuration p as follows. 4
5 The individual energy functions E ( p - p 2 ) ij i j 2 E ( p - p ) ij i j E ( p - p 2 ) ij i j 2 p - p i j A cable: Monotone increasing, concave up p - p i j 2 p - p i j 2 A bar: A local minimum, concave up A strut: Monotone decreasing, concave up 5
6 The critical calculation Define w ij = E ij ( p i -p j 2 ) the first derivative of E ij at x= p i -p j 2. Then a calculation shows that p is a critical point for the energy functional E if and only if w = (, w ij, ) is a proper self stress for the tensegrity G(p). Our goal is to determine when the configuration p is a local minimum for E, up to congruences. So we calculate the second derivative. 6
7 Stiffness For each member {i,j}, define c ij = E ij ( p i -p j 2 ) > 0, the second derivative of E ij at p i -p j 2 as the stiffness coefficient of member {i,j}. We assume that these coefficients are all positive. Define C as the e-by-e diagonal matrix whose ij, ij diagonal entry is c ij, where e is the number of members in the tensegrity. 7
8 Hessian Let p = (p 1, p 2, p n ) be a set of directions, where each p i is in E d. So E(p + tp ), for 0 t, has derivative 0 when t = 0, for all p. A calculation shows that the second derivative in this direction p is given by the sum of the following two quadratic forms: 4 S i j c ij [(p i - p j )(p i - p j )] S i j w ij (p i - p j ) 2. The matrix S = 4 R(p) T CR(p) is what we call the stiffness matrix, where R(p) is our old friend the rigidity matrix. Note that S is always positive semidefinite, and 4 (p ) T S p is the term on the left. 8
9 Stress matrix The matrix of the form on the right is 2 W, where each non-zero off-diagonal entry of W is defined to be -w ij corresponding to each coordinate, and such that the row and column sums are 0. The matrix W is called the stress matrix and is very interesting. It can provide a lot of global information about the tensegrity, although it can have negative eigenvalues. Define the matrix H = 4 S + 2 W. So 2 (p ) T Wp is the term on the right for the second derivative above. 9
10 Prestress stability Corresponding to given stress coefficients w, and stiffness coefficients, we say that G(p) is prestress stable if H is positive semidefinite with only the trivial infinitesimal flexes in its kernel. The following is in Connelly- Whiteley Theorem: If a tensegrity G(p) is prestress stable in E d, then it is rigid in E d. 10
11 Examples of prestress stable tensegrities The pattern of tensions and compressions is on the right. Neither of these structures is infinitesimally rigid. 11
12 Displacements and forces Given a prestress stable tensegrity structure G(p) and an equilibrium force F applied to the configuration p, how does p deform to accommodate F, and how is the force resolved? 12
13 Displacements and forces Given a prestress stable tensegrity framework G(p) and an equilibrium force F applied to the configuration p, how does p deform to accommodate F, and how is the force resolved? As a first approximation to the displacement Dp, solve F + 2HDp = 0, which is possible since H has maximal rank, and 2H is the gradient of the approximation to the energy form. Then the resolving stress can itself be determined from the edge lengths and the energy formulas. 13
14 Example of a displacement When the equilibrium force above is applied to this tensegrity it cannot resolve the force as is, but... it deforms into a configuration that does resolve the force. 14
15 An application to packings What sort of model of rigidity is appropriate for packings of ellipses in the plane or ellipsoids in space? Even for a single ellipse in a triangle, what does a maximal ellipse with a fixed axis ratio look like? (Joint work with A. Donev, S. Torquato, F. Stillinger, Chaiken, et. al.) 15
16 An ellipse in a triangle If the lines through the points of contact do not intersect in a point, then a rotation (counterclockwise here) about the triangle enclosed moves the ellipse into the triangle. 16

17 The critical case When the 3 lines meet at a point there is an "infinitesimal flex" of the ellipse inside the triangle. So there is no occasion when the ellipse is "infinitesimally rigid" inside the triangle. 17
18 Modeling ellipses At each point of contact between ellipses place a circle whose curvature is the same at the curvature of the ellipse at that point. Join these centers in each ellipse with a statically rigid bar framework. Join the centers of touching circles with a strut. 18
19 Consequences of the model The tensegrity paradigm applies to irregularly shaped particles. The notion of being infinitesimally rigid applies, BUT, unlike the case when all the particles are circles (or spheres in space), being rigid does not always imply infinitesimal rigidity. (The canonical push does not work in general.) If the structure is infinitesimally rigid, then there is a minimum number of contacts that are necessary. We calculate that next. 19
20 Contacts for ellipses Suppose a packing of ellipses in the plane is such that all are pinned except for n which are allowed to move, and the system is infinitesimally rigid. Each ellipse has 3 degrees of freedom and each contact corresponds to 2 ellipses, except for the boundary. So if n is large enough so that the boundary effects are negligible, and if Z is the average degree of a jammed ellipse packing, then Z 6 - O(n -1/2 ), which seems unlikely for congruent ellipses. 20
21 Contact numbers for ellipsoids Doing the same calculation in 3-space, where each ellipsoid has 3 distinct axis lengths, the degrees of freedom of each ellipsoid is 6. Then the average degree is Z 12 - O(n -2/3 ), which seems almost impossible for congruent ellipsoids unless they are a small perturbation of one of the standard most dense packings of congruent spheres. 21
22 Almost spherical ellipsoids There was a famous argument between Newton and Gregory about how many spheres can touch a single sphere, all with the same radius in a packing. Newton said 12, Gregory 13. Newton was right as shown in the 1950 s. This must also be true for ellipsoids if the axis ratios are close enough to 1. So the coordination number for such ellipsoids cannot be greater than 12 either. So if any sort of random packing of such packings is jammed, its coordination number should be closer to 6 than 12 and it cannot be statically rigid. 22
23 Contact numbers for spheroids When the ellipsoid has one degree of rotational symmetry, i.e. when two of the three axes are the same length, that subtracts from the degrees of freedom of the ellipsoids. In that case, for infinitesimal rigidity, one needs Z 10 -O(n -2/3 ) for the coordination number. 23
24 Experimental results In the 8 author joint paper in Science, it is shown that in dimension 3 with congruent (monodispersed) ellipsoids with an axis ratio chosen in the range close to 1, but not equal to, have coordination number less than 12 in the case when all axes are different and less than 10 (about 9.5 for some) when two of the axes are the same. 24
25 The moral of the story Random, even mildly random, packings of ellipsoids must not be infinitesimally rigid. They must be prestress stable. Random packings of monodispersed ellipsoids with the appropriately chosen axis ratios tend to have surprisingly high packing densities. 25
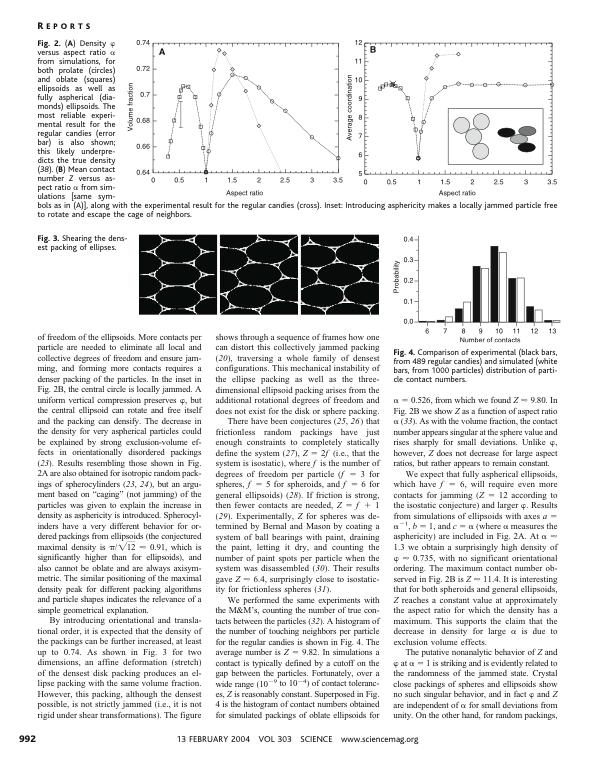
26 Packing densities and coordination numbers Axis ratios Packing density Coordination number 1 : 1 : : 1 : : 1.3 : : 1 : 0.6 (m&m s)
27 27

28 The m&m container and simulation 28
29 Remarks Theorem (L. Fejes Toth 1940 s): The most dense packing of any centrally symmetric convex body in the plane is achieved with a lattice packing. In particular, for any ellipse, it has maximum packing density p/ 12= , the same as the most dense packing of congruent circles, and for a periodic packing it is achieved by a one parameter family of ellipses obtained by some rotation of the standard circle packing dilated in one direction only. 29
30 An ellipse packing with max density 30
31 An ellipse packing with max density 31
32 An ellipse packing with max density 32
33 Packing congruent ellipsoids A. Bezdek and W. Kuperberg showed that there are packings of congruent ellipsoids whose packing density exceeds p/ 18=0.7408, the most dense packing of congruent spheres in 3-space. This was improved by Donev, Chaiken, Stillinger, Torquato to

34 The first layer 34
35 The ellipsoid packing Each layer is as in the previous slide. But each layer is turned 90º and laid down onto the next layer. It then fits better than laying them down in a parallel manner. The axis ratio of the ellipsoids in each layer is 3. The length in the third direction is arbitrary. So this 77% density can be achieved when any of the 3 axis ratios is 3. Each ellipsoid is in contact with 14 others. Note that the most dense random arrangement of ellipsoids was one where one of the axis ratios way 1.68, where as 3=
36 Question Is there an upper bound a < 1 for the best packing density of congruent ellipsoids, independent of the axis ratios? 36
HIGHER ORDER RIGIDITY - WHAT IS THE PROPER DEFINITION?
 HIGHER ORDER RIGIDITY - WHAT IS THE PROPER DEFINITION? ROBERT CONNELLY AND HERMAN SERVATIUS Abstract. We show that there is a bar and joint framework G(p) which has a configuration p in the plane such
HIGHER ORDER RIGIDITY - WHAT IS THE PROPER DEFINITION? ROBERT CONNELLY AND HERMAN SERVATIUS Abstract. We show that there is a bar and joint framework G(p) which has a configuration p in the plane such
Simon D. GUEST Reader University of Cambridge Cambridge, UK.
 Multi-stable Star-shaped Tensegrity Structures Jingyao ZHANG Lecturer Ritsumeikan University Kusatsu, Shiga, JAPAN zhang@fc.ritsumei.ac.jp Robert CONNELLY Professor Cornell University Ithaca, NY, USA rc46@cornell.edu
Multi-stable Star-shaped Tensegrity Structures Jingyao ZHANG Lecturer Ritsumeikan University Kusatsu, Shiga, JAPAN zhang@fc.ritsumei.ac.jp Robert CONNELLY Professor Cornell University Ithaca, NY, USA rc46@cornell.edu
Flavors of Rigidity Flavor III - Universal Rigidity and Tensegrities
 Flavors of Rigidity Flavor III - Universal Rigidity and Tensegrities Discrete Networks University of Pittsburgh Bob Connelly Cornell University October 2014 1 / 22 Stress-Energy Form Recall that a tensegrity
Flavors of Rigidity Flavor III - Universal Rigidity and Tensegrities Discrete Networks University of Pittsburgh Bob Connelly Cornell University October 2014 1 / 22 Stress-Energy Form Recall that a tensegrity
collisions inelastic, energy is dissipated and not conserved
 LECTURE 1 - Introduction to Granular Materials Jamming, Random Close Packing, The Isostatic State Granular materials particles only interact when they touch hard cores: rigid, incompressible, particles
LECTURE 1 - Introduction to Granular Materials Jamming, Random Close Packing, The Isostatic State Granular materials particles only interact when they touch hard cores: rigid, incompressible, particles
Underconstrained jammed packings of nonspherical hard particles: Ellipses and ellipsoids
 Underconstrained jammed packings of nonspherical hard particles: Ellipses and ellipsoids Aleksandar Donev, 1,2 Robert Connelly, 3 Frank H. Stillinger, 4 and Salvatore Torquato 1,2,4,5, * 1 Program in Applied
Underconstrained jammed packings of nonspherical hard particles: Ellipses and ellipsoids Aleksandar Donev, 1,2 Robert Connelly, 3 Frank H. Stillinger, 4 and Salvatore Torquato 1,2,4,5, * 1 Program in Applied
Mathematical Properties of Stiffness Matrices
 Mathematical Properties of Stiffness Matrices CEE 4L. Matrix Structural Analysis Department of Civil and Environmental Engineering Duke University Henri P. Gavin Fall, 0 These notes describe some of the
Mathematical Properties of Stiffness Matrices CEE 4L. Matrix Structural Analysis Department of Civil and Environmental Engineering Duke University Henri P. Gavin Fall, 0 These notes describe some of the
Hypoconstrained Jammed Packings of Nonspherical Hard Particles: Ellipses and Ellipsoids
 Hypoconstrained Jammed Packings of Nonspherical Hard Particles: Ellipses and Ellipsoids Aleksandar Donev, 1, 2 Robert Connelly, 3 Frank H. Stillinger, 4 1, 2, 4, 5, and Salvatore Torquato 1 Program in
Hypoconstrained Jammed Packings of Nonspherical Hard Particles: Ellipses and Ellipsoids Aleksandar Donev, 1, 2 Robert Connelly, 3 Frank H. Stillinger, 4 1, 2, 4, 5, and Salvatore Torquato 1 Program in
Frameworks and Tensegrities
 Frameworks and Tensegrities A Thesis Presented to The Division of Mathematics and Natural Sciences Reed College In Partial Fulfillment of the Requirements for the Degree Bachelor of Arts Ananda D. Floyd
Frameworks and Tensegrities A Thesis Presented to The Division of Mathematics and Natural Sciences Reed College In Partial Fulfillment of the Requirements for the Degree Bachelor of Arts Ananda D. Floyd
MEE224: Engineering Mechanics Lecture 4
 Lecture 4: Structural Analysis Part 1: Trusses So far we have only analysed forces and moments on a single rigid body, i.e. bars. Remember that a structure is a formed by and this lecture will investigate
Lecture 4: Structural Analysis Part 1: Trusses So far we have only analysed forces and moments on a single rigid body, i.e. bars. Remember that a structure is a formed by and this lecture will investigate
Optimization Methods for Force and Shape Design of Tensegrity Structures. J.Y. Zhang and M. Ohsaki Kyoto University, Japan
 Optimization Methods for Force and Shape Design of Tensegrity Structures J.Y. Zhang and M. Ohsaki Kyoto University, Japan Contents Purpose Optimization techniques are effective for shape and force design
Optimization Methods for Force and Shape Design of Tensegrity Structures J.Y. Zhang and M. Ohsaki Kyoto University, Japan Contents Purpose Optimization techniques are effective for shape and force design
******************************************************************************
 ****************************************************************************** INFORMAL ANALYSIS SEMINAR/Lecture Series in Analysis Saturday and Sunday, February 24-28, 2018 ******************************************************************************
****************************************************************************** INFORMAL ANALYSIS SEMINAR/Lecture Series in Analysis Saturday and Sunday, February 24-28, 2018 ******************************************************************************
OHSx XM521 Multivariable Differential Calculus: Homework Solutions 13.1
 OHSx XM521 Multivariable Differential Calculus: Homework Solutions 13.1 (37) If a bug walks on the sphere x 2 + y 2 + z 2 + 2x 2y 4z 3 = 0 how close and how far can it get from the origin? Solution: Complete
OHSx XM521 Multivariable Differential Calculus: Homework Solutions 13.1 (37) If a bug walks on the sphere x 2 + y 2 + z 2 + 2x 2y 4z 3 = 0 how close and how far can it get from the origin? Solution: Complete
Functions of Several Variables
 Functions of Several Variables The Unconstrained Minimization Problem where In n dimensions the unconstrained problem is stated as f() x variables. minimize f()x x, is a scalar objective function of vector
Functions of Several Variables The Unconstrained Minimization Problem where In n dimensions the unconstrained problem is stated as f() x variables. minimize f()x x, is a scalar objective function of vector
Lecture Presentation Chapter 8 Equilibrium and Elasticity
 Lecture Presentation Chapter 8 Equilibrium and Elasticity Suggested Videos for Chapter 8 Prelecture Videos Static Equilibrium Elasticity Video Tutor Solutions Equilibrium and Elasticity Class Videos Center
Lecture Presentation Chapter 8 Equilibrium and Elasticity Suggested Videos for Chapter 8 Prelecture Videos Static Equilibrium Elasticity Video Tutor Solutions Equilibrium and Elasticity Class Videos Center
LECTURE 14: DEVELOPING THE EQUATIONS OF MOTION FOR TWO-MASS VIBRATION EXAMPLES
 LECTURE 14: DEVELOPING THE EQUATIONS OF MOTION FOR TWO-MASS VIBRATION EXAMPLES Figure 3.47 a. Two-mass, linear vibration system with spring connections. b. Free-body diagrams. c. Alternative free-body
LECTURE 14: DEVELOPING THE EQUATIONS OF MOTION FOR TWO-MASS VIBRATION EXAMPLES Figure 3.47 a. Two-mass, linear vibration system with spring connections. b. Free-body diagrams. c. Alternative free-body
ME 274 Spring 2017 Examination No. 2 PROBLEM No. 2 (20 pts.) Given:
 Given:") PROBLEM No. 2 (20 pts.) Given: Blocks A and B (having masses of 2m and m, respectively) are connected by an inextensible cable, with the cable being pulled over a small pulley of negligible mass. Block
PROBLEM No. 2 (20 pts.) Given: Blocks A and B (having masses of 2m and m, respectively) are connected by an inextensible cable, with the cable being pulled over a small pulley of negligible mass. Block
Brigitte Servatius and Herman Servatius. Department of Mathematics Syracuse University Syracuse NY,
 GENERIC AND ABSTRACT RIGIDITY Brigitte Servatius and Herman Servatius Department of Mathematics Syracuse University Syracuse NY, 13244-1150 Rigidity We are all familiar with frameworks of rods attached
GENERIC AND ABSTRACT RIGIDITY Brigitte Servatius and Herman Servatius Department of Mathematics Syracuse University Syracuse NY, 13244-1150 Rigidity We are all familiar with frameworks of rods attached
OPTIMUM PRE-STRESS DESIGN FOR FREQUENCY REQUIREMENT OF TENSEGRITY STRUCTURES
 Blucher Mechanical Engineering Proceedings May 2014, vol. 1, num. 1 www.proceedings.blucher.com.br/evento/10wccm OPTIMUM PRE-STRESS DESIGN FOR FREQUENCY REQUIREMENT OF TENSEGRITY STRUCTURES Seif Dalil
Blucher Mechanical Engineering Proceedings May 2014, vol. 1, num. 1 www.proceedings.blucher.com.br/evento/10wccm OPTIMUM PRE-STRESS DESIGN FOR FREQUENCY REQUIREMENT OF TENSEGRITY STRUCTURES Seif Dalil
Theory of structure I 2006/2013. Chapter one DETERMINACY & INDETERMINACY OF STRUCTURES
 Chapter one DETERMINACY & INDETERMINACY OF STRUCTURES Introduction A structure refers to a system of connected parts used to support a load. Important examples related to civil engineering include buildings,
Chapter one DETERMINACY & INDETERMINACY OF STRUCTURES Introduction A structure refers to a system of connected parts used to support a load. Important examples related to civil engineering include buildings,
three Equilibrium 1 and planar trusses ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2015 lecture ARCH 614
 ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2015 lecture three equilibrium and planar trusses Equilibrium 1 Equilibrium balanced steady resultant of forces
ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2015 lecture three equilibrium and planar trusses Equilibrium 1 Equilibrium balanced steady resultant of forces
Packing and Minkowski Covering of Congruent Spherical Caps on a Sphere for N = 2,..., 9
 Original Paper Forma, 1, 197 5, 006 Packing and Minkowski Covering of Congruent Spherical Caps on a Sphere for N =,..., 9 Teruhisa SUGIMOTO 1 * and Masaharu TANEMURA 1, 1 The Institute of Statistical Mathematics,
Original Paper Forma, 1, 197 5, 006 Packing and Minkowski Covering of Congruent Spherical Caps on a Sphere for N =,..., 9 Teruhisa SUGIMOTO 1 * and Masaharu TANEMURA 1, 1 The Institute of Statistical Mathematics,
Review of Strain Energy Methods and Introduction to Stiffness Matrix Methods of Structural Analysis
 uke University epartment of Civil and Environmental Engineering CEE 42L. Matrix Structural Analysis Henri P. Gavin Fall, 22 Review of Strain Energy Methods and Introduction to Stiffness Matrix Methods
uke University epartment of Civil and Environmental Engineering CEE 42L. Matrix Structural Analysis Henri P. Gavin Fall, 22 Review of Strain Energy Methods and Introduction to Stiffness Matrix Methods
Problem 1: Find the Equation of Motion from the static equilibrium position for the following systems: 1) Assumptions
 Assumptions") Problem 1: Find the Equation of Motion from the static equilibrium position for the following systems: 1) Assumptions k 2 Wheels roll without friction k 1 Motion will not cause block to hit the supports
Problem 1: Find the Equation of Motion from the static equilibrium position for the following systems: 1) Assumptions k 2 Wheels roll without friction k 1 Motion will not cause block to hit the supports
Lecture Outline Chapter 6. Physics, 4 th Edition James S. Walker. Copyright 2010 Pearson Education, Inc.
 Lecture Outline Chapter 6 Physics, 4 th Edition James S. Walker Chapter 6 Applications of Newton s Laws Units of Chapter 6 Frictional Forces Strings and Springs Translational Equilibrium Connected Objects
Lecture Outline Chapter 6 Physics, 4 th Edition James S. Walker Chapter 6 Applications of Newton s Laws Units of Chapter 6 Frictional Forces Strings and Springs Translational Equilibrium Connected Objects
Figure Two. Then the two vector equations of equilibrium are equivalent to three scalar equations:
 2004- v 10/16 2. The resultant external torque (the vector sum of all external torques) acting on the body must be zero about any origin. These conditions can be written as equations: F = 0 = 0 where the
2004- v 10/16 2. The resultant external torque (the vector sum of all external torques) acting on the body must be zero about any origin. These conditions can be written as equations: F = 0 = 0 where the
Methods of Analysis. Force or Flexibility Method
 INTRODUCTION: The structural analysis is a mathematical process by which the response of a structure to specified loads is determined. This response is measured by determining the internal forces or stresses
INTRODUCTION: The structural analysis is a mathematical process by which the response of a structure to specified loads is determined. This response is measured by determining the internal forces or stresses
three Point Equilibrium 1 and planar trusses ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SUMMER 2014 lecture
 ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SUMMER 2014 lecture three point equilibrium http:// nisee.berkeley.edu/godden and planar trusses Point Equilibrium 1 Equilibrium balanced
ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SUMMER 2014 lecture three point equilibrium http:// nisee.berkeley.edu/godden and planar trusses Point Equilibrium 1 Equilibrium balanced
Linear Equations in Linear Algebra
 Linear Equations in Linear Algebra.7 LINEAR INDEPENDENCE LINEAR INDEPENDENCE Definition: An indexed set of vectors {v,, v p } in n is said to be linearly independent if the vector equation x x x 2 2 p
Linear Equations in Linear Algebra.7 LINEAR INDEPENDENCE LINEAR INDEPENDENCE Definition: An indexed set of vectors {v,, v p } in n is said to be linearly independent if the vector equation x x x 2 2 p
For problems on statics:
 Statics For problems on statics: - Write down the condition of force balance for the x-, y-, and z- components - The condition of torque balance must be added Idea 1 - Statics: We have to write down the
Statics For problems on statics: - Write down the condition of force balance for the x-, y-, and z- components - The condition of torque balance must be added Idea 1 - Statics: We have to write down the
ENGINEERING MECHANICS STATIC
 Trusses Simple trusses The basic element of a truss is the triangle, three bars joined by pins at their ends, fig. a below, constitutes a rigid frame. The term rigid is used to mean noncollapsible and
Trusses Simple trusses The basic element of a truss is the triangle, three bars joined by pins at their ends, fig. a below, constitutes a rigid frame. The term rigid is used to mean noncollapsible and
A physical interpretation of the rigidity matrix
 A physical interpretation of the rigidity matrix Hyo-Sung Ahn 1 (Collaborations with Minh Hoang Trinh, Zhiyong Sun, Brian D. O. Anderson, and Viet Hoang Pham) 1 Distributed Control & Autonomous Systems
A physical interpretation of the rigidity matrix Hyo-Sung Ahn 1 (Collaborations with Minh Hoang Trinh, Zhiyong Sun, Brian D. O. Anderson, and Viet Hoang Pham) 1 Distributed Control & Autonomous Systems
USAC Colloquium. Bending Polyhedra. Andrejs Treibergs. September 4, Figure 1: A Rigid Polyhedron. University of Utah
 USAC Colloquium Bending Polyhedra Andrejs Treibergs University of Utah September 4, 2013 Figure 1: A Rigid Polyhedron. 2. USAC Lecture: Bending Polyhedra The URL for these Beamer Slides: BendingPolyhedra
USAC Colloquium Bending Polyhedra Andrejs Treibergs University of Utah September 4, 2013 Figure 1: A Rigid Polyhedron. 2. USAC Lecture: Bending Polyhedra The URL for these Beamer Slides: BendingPolyhedra
Rigidity of Skeletal Structures
 CHAPTER 3 Rigidity of Skeletal Structures 3. INTRODUCTION The rigidity of structures has been studied by pioneering structural engineers such as Henneberg [79] and Müller-Breslau [76]. The methods they
CHAPTER 3 Rigidity of Skeletal Structures 3. INTRODUCTION The rigidity of structures has been studied by pioneering structural engineers such as Henneberg [79] and Müller-Breslau [76]. The methods they
A Linear Programming Algorithm to Test for Jamming in Hard-Sphere Packings
 J. Computational Physics Manuscript A Linear Programming Algorithm to Test for Jamming in Hard-Sphere Packings Aleksandar Donev, 1, 2 Salvatore Torquato, 2, 3, Frank H. Stillinger, 3 and Robert Connelly
J. Computational Physics Manuscript A Linear Programming Algorithm to Test for Jamming in Hard-Sphere Packings Aleksandar Donev, 1, 2 Salvatore Torquato, 2, 3, Frank H. Stillinger, 3 and Robert Connelly
MATHEMATICS 132 Applied Mathematics 1A (Engineering) EXAMINATION
 EXAMINATION") MATHEMATICS 132 Applied Mathematics 1A (Engineering) EXAMINATION DURATION: 3 HOURS 26TH MAY 2011 MAXIMUM MARKS: 100 LECTURERS: PROF J. VAN DEN BERG AND DR J. M. T. NGNOTCHOUYE EXTERNAL EXAMINER: DR K.
MATHEMATICS 132 Applied Mathematics 1A (Engineering) EXAMINATION DURATION: 3 HOURS 26TH MAY 2011 MAXIMUM MARKS: 100 LECTURERS: PROF J. VAN DEN BERG AND DR J. M. T. NGNOTCHOUYE EXTERNAL EXAMINER: DR K.
Equilibrium Conditions of a Tensegrity Structure
 Proceedings of the Third World Conference on Structural Control (3WCSC) Como, Italy, April 7-12, 2002 Equilibrium Conditions of a Tensegrity Structure Darrell Williamson, Robert E. Skelton, and JeongHeon
Proceedings of the Third World Conference on Structural Control (3WCSC) Como, Italy, April 7-12, 2002 Equilibrium Conditions of a Tensegrity Structure Darrell Williamson, Robert E. Skelton, and JeongHeon
Unit Workbook 1 Level 4 ENG U8 Mechanical Principles 2018 UniCourse Ltd. All Rights Reserved. Sample
 Pearson BTEC Levels 4 Higher Nationals in Engineering (RQF) Unit 8: Mechanical Principles Unit Workbook 1 in a series of 4 for this unit Learning Outcome 1 Static Mechanical Systems Page 1 of 23 1.1 Shafts
Pearson BTEC Levels 4 Higher Nationals in Engineering (RQF) Unit 8: Mechanical Principles Unit Workbook 1 in a series of 4 for this unit Learning Outcome 1 Static Mechanical Systems Page 1 of 23 1.1 Shafts
Vector Mechanics: Statics
 PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
Positive Semidefinite Matrix Completion, Universal Rigidity and the Strong Arnold Property
 Positive Semidefinite Matrix Completion, Universal Rigidity and the Strong Arnold Property M. Laurent a,b, A. Varvitsiotis a, a Centrum Wiskunde & Informatica (CWI), Science Park 123, 1098 XG Amsterdam,
Positive Semidefinite Matrix Completion, Universal Rigidity and the Strong Arnold Property M. Laurent a,b, A. Varvitsiotis a, a Centrum Wiskunde & Informatica (CWI), Science Park 123, 1098 XG Amsterdam,
(ii) find ways of generating rigid frameworks; (i) provide methods for recognizing when a given framework is rigid;
 find ways of generating rigid frameworks; (i) provide methods for recognizing when a given framework is rigid;") SIAM J. DISCRETE MATH. Vol. 9, No. 3, pp. 453-491, August 1996 () 1996 Society for Industrial and Applied Mathematics 008 SECOND-ORDER RIGIDITY AND PRESTRESS STABILITY FOR TENSEGRITY FRAMEWORKS* ROBERT
SIAM J. DISCRETE MATH. Vol. 9, No. 3, pp. 453-491, August 1996 () 1996 Society for Industrial and Applied Mathematics 008 SECOND-ORDER RIGIDITY AND PRESTRESS STABILITY FOR TENSEGRITY FRAMEWORKS* ROBERT
Equilibrium Conditions of Class 1 Tensegrity Structures
 Revue francaise de genie civil, July, 2003 Equilibrium Conditions of Class 1 Tensegrity Structures Darrell Williamson, Robert E. Skelton, JeongHeon Han University of Wollongong, Faculty of Informatics,
Revue francaise de genie civil, July, 2003 Equilibrium Conditions of Class 1 Tensegrity Structures Darrell Williamson, Robert E. Skelton, JeongHeon Han University of Wollongong, Faculty of Informatics,
Chapter 6 Some Applications of the Integral
 Chapter 6 Some Applications of the Integral Section 6.1 More on Area a. Representative Rectangle b. Vertical Separation c. Example d. Integration with Respect to y e. Example Section 6.2 Volume by Parallel
Chapter 6 Some Applications of the Integral Section 6.1 More on Area a. Representative Rectangle b. Vertical Separation c. Example d. Integration with Respect to y e. Example Section 6.2 Volume by Parallel
1 Kernel methods & optimization
 Machine Learning Class Notes 9-26-13 Prof. David Sontag 1 Kernel methods & optimization One eample of a kernel that is frequently used in practice and which allows for highly non-linear discriminant functions
Machine Learning Class Notes 9-26-13 Prof. David Sontag 1 Kernel methods & optimization One eample of a kernel that is frequently used in practice and which allows for highly non-linear discriminant functions
Statics Chapter II Fall 2018 Exercises Corresponding to Sections 2.1, 2.2, and 2.3
 Statics Chapter II Fall 2018 Exercises Corresponding to Sections 2.1, 2.2, and 2.3 2 3 Determine the magnitude of the resultant force FR = F1 + F2 and its direction, measured counterclockwise from the
Statics Chapter II Fall 2018 Exercises Corresponding to Sections 2.1, 2.2, and 2.3 2 3 Determine the magnitude of the resultant force FR = F1 + F2 and its direction, measured counterclockwise from the
Engineering Mechanics: Statics in SI Units, 12e
 Engineering Mechanics: Statics in SI Units, 12e 3 Equilibrium of a Particle 1 Chapter Objectives Concept of the free-body diagram for a particle Solve particle equilibrium problems using the equations
Engineering Mechanics: Statics in SI Units, 12e 3 Equilibrium of a Particle 1 Chapter Objectives Concept of the free-body diagram for a particle Solve particle equilibrium problems using the equations
Lecture 15 Strain and stress in beams
 Spring, 2019 ME 323 Mechanics of Materials Lecture 15 Strain and stress in beams Reading assignment: 6.1 6.2 News: Instructor: Prof. Marcial Gonzalez Last modified: 1/6/19 9:42:38 PM Beam theory (@ ME
Spring, 2019 ME 323 Mechanics of Materials Lecture 15 Strain and stress in beams Reading assignment: 6.1 6.2 News: Instructor: Prof. Marcial Gonzalez Last modified: 1/6/19 9:42:38 PM Beam theory (@ ME
Mechanical Design in Optical Engineering
 OPTI Buckling Buckling and Stability: As we learned in the previous lectures, structures may fail in a variety of ways, depending on the materials, load and support conditions. We had two primary concerns:
OPTI Buckling Buckling and Stability: As we learned in the previous lectures, structures may fail in a variety of ways, depending on the materials, load and support conditions. We had two primary concerns:
7. Symmetric Matrices and Quadratic Forms
 Linear Algebra 7. Symmetric Matrices and Quadratic Forms CSIE NCU 1 7. Symmetric Matrices and Quadratic Forms 7.1 Diagonalization of symmetric matrices 2 7.2 Quadratic forms.. 9 7.4 The singular value
Linear Algebra 7. Symmetric Matrices and Quadratic Forms CSIE NCU 1 7. Symmetric Matrices and Quadratic Forms 7.1 Diagonalization of symmetric matrices 2 7.2 Quadratic forms.. 9 7.4 The singular value
EQUILIBRIUM and ELASTICITY
 PH 221-1D Spring 2013 EQUILIBRIUM and ELASTICITY Lectures 30-32 Chapter 12 (Halliday/Resnick/Walker, Fundamentals of Physics 9 th edition) 1 Chapter 12 Equilibrium and Elasticity In this chapter we will
PH 221-1D Spring 2013 EQUILIBRIUM and ELASTICITY Lectures 30-32 Chapter 12 (Halliday/Resnick/Walker, Fundamentals of Physics 9 th edition) 1 Chapter 12 Equilibrium and Elasticity In this chapter we will
Math (P)refresher Lecture 8: Unconstrained Optimization
refresher Lecture 8: Unconstrained Optimization") Math (P)refresher Lecture 8: Unconstrained Optimization September 2006 Today s Topics : Quadratic Forms Definiteness of Quadratic Forms Maxima and Minima in R n First Order Conditions Second Order Conditions
Math (P)refresher Lecture 8: Unconstrained Optimization September 2006 Today s Topics : Quadratic Forms Definiteness of Quadratic Forms Maxima and Minima in R n First Order Conditions Second Order Conditions
Linear Algebra Massoud Malek
 CSUEB Linear Algebra Massoud Malek Inner Product and Normed Space In all that follows, the n n identity matrix is denoted by I n, the n n zero matrix by Z n, and the zero vector by θ n An inner product
CSUEB Linear Algebra Massoud Malek Inner Product and Normed Space In all that follows, the n n identity matrix is denoted by I n, the n n zero matrix by Z n, and the zero vector by θ n An inner product
Equilibrium & Elasticity
 PHYS 101 Previous Exam Problems CHAPTER 12 Equilibrium & Elasticity Static equilibrium Elasticity 1. A uniform steel bar of length 3.0 m and weight 20 N rests on two supports (A and B) at its ends. A block
PHYS 101 Previous Exam Problems CHAPTER 12 Equilibrium & Elasticity Static equilibrium Elasticity 1. A uniform steel bar of length 3.0 m and weight 20 N rests on two supports (A and B) at its ends. A block
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA MECHANICAL PRINCIPLES AND APPLICATIONS NQF LEVEL 3 OUTCOME 1 - LOADING SYSTEMS TUTORIAL 3 LOADED COMPONENTS
 EDEXCEL NATIONAL CERTIICATE/DIPLOMA MECHANICAL PRINCIPLES AND APPLICATIONS NQ LEVEL 3 OUTCOME 1 - LOADING SYSTEMS TUTORIAL 3 LOADED COMPONENTS 1. Be able to determine the effects of loading in static engineering
EDEXCEL NATIONAL CERTIICATE/DIPLOMA MECHANICAL PRINCIPLES AND APPLICATIONS NQ LEVEL 3 OUTCOME 1 - LOADING SYSTEMS TUTORIAL 3 LOADED COMPONENTS 1. Be able to determine the effects of loading in static engineering
Rotational motion of a rigid body spinning around a rotational axis ˆn;
 Physics 106a, Caltech 15 November, 2018 Lecture 14: Rotations The motion of solid bodies So far, we have been studying the motion of point particles, which are essentially just translational. Bodies with
Physics 106a, Caltech 15 November, 2018 Lecture 14: Rotations The motion of solid bodies So far, we have been studying the motion of point particles, which are essentially just translational. Bodies with
Lecture 8: Flexibility Method. Example
 ecture 8: lexibility Method Example The plane frame shown at the left has fixed supports at A and C. The frame is acted upon by the vertical load P as shown. In the analysis account for both flexural and
ecture 8: lexibility Method Example The plane frame shown at the left has fixed supports at A and C. The frame is acted upon by the vertical load P as shown. In the analysis account for both flexural and
Rigid Geometric Transformations
 Rigid Geometric Transformations Carlo Tomasi This note is a quick refresher of the geometry of rigid transformations in three-dimensional space, expressed in Cartesian coordinates. 1 Cartesian Coordinates
Rigid Geometric Transformations Carlo Tomasi This note is a quick refresher of the geometry of rigid transformations in three-dimensional space, expressed in Cartesian coordinates. 1 Cartesian Coordinates
STRESS STRAIN AND DEFORMATION OF SOLIDS, STATES OF STRESS
 1 UNIT I STRESS STRAIN AND DEFORMATION OF SOLIDS, STATES OF STRESS 1. Define: Stress When an external force acts on a body, it undergoes deformation. At the same time the body resists deformation. The
1 UNIT I STRESS STRAIN AND DEFORMATION OF SOLIDS, STATES OF STRESS 1. Define: Stress When an external force acts on a body, it undergoes deformation. At the same time the body resists deformation. The
AP Physics C Mechanics Objectives
 AP Physics C Mechanics Objectives I. KINEMATICS A. Motion in One Dimension 1. The relationships among position, velocity and acceleration a. Given a graph of position vs. time, identify or sketch a graph
AP Physics C Mechanics Objectives I. KINEMATICS A. Motion in One Dimension 1. The relationships among position, velocity and acceleration a. Given a graph of position vs. time, identify or sketch a graph
CS168: The Modern Algorithmic Toolbox Lecture #7: Understanding Principal Component Analysis (PCA)
") CS68: The Modern Algorithmic Toolbox Lecture #7: Understanding Principal Component Analysis (PCA) Tim Roughgarden & Gregory Valiant April 0, 05 Introduction. Lecture Goal Principal components analysis
CS68: The Modern Algorithmic Toolbox Lecture #7: Understanding Principal Component Analysis (PCA) Tim Roughgarden & Gregory Valiant April 0, 05 Introduction. Lecture Goal Principal components analysis
When is a symmetric pin-jointed framework isostatic? arxiv: v1 [math.mg] 15 Mar 2008
![When is a symmetric pin-jointed framework isostatic? arxiv: v1 [math.mg] 15 Mar 2008](/thumbs/72/66757068.jpg "When is a symmetric pin-jointed framework isostatic? arxiv: v1 [math.mg] 15 Mar 2008") When is a symmetric pin-jointed framework isostatic? arxiv:0803.2325v1 [math.mg] 15 Mar 2008 R. Connelly Department of Mathematics, Cornell University, Ithaca, NY 14853, USA P.W. Fowler Department of Chemistry,
When is a symmetric pin-jointed framework isostatic? arxiv:0803.2325v1 [math.mg] 15 Mar 2008 R. Connelly Department of Mathematics, Cornell University, Ithaca, NY 14853, USA P.W. Fowler Department of Chemistry,
arxiv: v1 [cond-mat.stat-mech] 4 Jan 2010
![arxiv: v1 [cond-mat.stat-mech] 4 Jan 2010](/thumbs/72/66958707.jpg "arxiv: v1 [cond-mat.stat-mech] 4 Jan 2010") Novel Features Arising in Maximally Random Jammed Packings of Superballs Y. Jiao 1, F. H. Stillinger 2 and S. Torquato 2,3,4,5 arxiv:1001.0423v1 [cond-mat.stat-mech] 4 Jan 2010 1 Department of Mechanical
Novel Features Arising in Maximally Random Jammed Packings of Superballs Y. Jiao 1, F. H. Stillinger 2 and S. Torquato 2,3,4,5 arxiv:1001.0423v1 [cond-mat.stat-mech] 4 Jan 2010 1 Department of Mechanical
Scientific Computing: Optimization
 Scientific Computing: Optimization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 March 8th, 2011 A. Donev (Courant Institute) Lecture
Scientific Computing: Optimization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 March 8th, 2011 A. Donev (Courant Institute) Lecture
Smooth Structure. lies on the boundary, then it is determined up to the identifications it 1 2
 132 3. Smooth Structure lies on the boundary, then it is determined up to the identifications 1 2 + it 1 2 + it on the vertical boundary and z 1/z on the circular part. Notice that since z z + 1 and z
132 3. Smooth Structure lies on the boundary, then it is determined up to the identifications 1 2 + it 1 2 + it on the vertical boundary and z 1/z on the circular part. Notice that since z z + 1 and z
Lecture Slides. Chapter 4. Deflection and Stiffness. The McGraw-Hill Companies 2012
 Lecture Slides Chapter 4 Deflection and Stiffness The McGraw-Hill Companies 2012 Chapter Outline Force vs Deflection Elasticity property of a material that enables it to regain its original configuration
Lecture Slides Chapter 4 Deflection and Stiffness The McGraw-Hill Companies 2012 Chapter Outline Force vs Deflection Elasticity property of a material that enables it to regain its original configuration
Statics deal with the condition of equilibrium of bodies acted upon by forces.
 Mechanics It is defined as that branch of science, which describes and predicts the conditions of rest or motion of bodies under the action of forces. Engineering mechanics applies the principle of mechanics
Mechanics It is defined as that branch of science, which describes and predicts the conditions of rest or motion of bodies under the action of forces. Engineering mechanics applies the principle of mechanics
Coning, Symmetry and Spherical Frameworks
 Discrete Comput Geom (2012) 48:622 657 DOI 101007/s00454-012-9427-3 Coning, Symmetry and Spherical Frameworks Bernd Schulze Walter Whiteley Received: 12 August 2011 / Revised: 1 April 2012 / Accepted:
Discrete Comput Geom (2012) 48:622 657 DOI 101007/s00454-012-9427-3 Coning, Symmetry and Spherical Frameworks Bernd Schulze Walter Whiteley Received: 12 August 2011 / Revised: 1 April 2012 / Accepted:
Static Equilibrium. University of Arizona J. H. Burge
 Static Equilibrium Static Equilibrium Definition: When forces acting on an object which is at rest are balanced, then the object is in a state of static equilibrium. - No translations - No rotations In
Static Equilibrium Static Equilibrium Definition: When forces acting on an object which is at rest are balanced, then the object is in a state of static equilibrium. - No translations - No rotations In
arxiv:submit/ [cond-mat.soft] 26 Nov 2017
![arxiv:submit/ [cond-mat.soft] 26 Nov 2017](/thumbs/92/110497682.jpg "arxiv:submit/ [cond-mat.soft] 26 Nov 2017") Hypostatic jammed packings of frictionless nonspherical particles arxiv:submit/2082856 [cond-mat.soft] 26 Nov 2017 Kyle VanderWerf 1 Weiwei Jin 34 Mark D. Shattuck 2 Corey S. O Hern 4156 1 Department of
Hypostatic jammed packings of frictionless nonspherical particles arxiv:submit/2082856 [cond-mat.soft] 26 Nov 2017 Kyle VanderWerf 1 Weiwei Jin 34 Mark D. Shattuck 2 Corey S. O Hern 4156 1 Department of
F R. + F 3x. + F 2y. = (F 1x. j + F 3x. i + F 2y. i F 3y. i + F 1y. j F 2x. ) i + (F 1y. ) j. F 2x. F 3y. = (F ) i + (F ) j. ) j
 i + (F 1y. ) j. F 2x. F 3y. = (F ) i + (F ) j. ) j") General comments: closed book and notes but optional one page crib sheet allowed. STUDY: old exams, homework and power point lectures! Key: make sure you can solve your homework problems and exam problems.
General comments: closed book and notes but optional one page crib sheet allowed. STUDY: old exams, homework and power point lectures! Key: make sure you can solve your homework problems and exam problems.
ENGR-1100 Introduction to Engineering Analysis. Lecture 13
 ENGR-1100 Introduction to Engineering Analysis Lecture 13 EQUILIBRIUM OF A RIGID BODY & FREE-BODY DIAGRAMS Today s Objectives: Students will be able to: a) Identify support reactions, and, b) Draw a free-body
ENGR-1100 Introduction to Engineering Analysis Lecture 13 EQUILIBRIUM OF A RIGID BODY & FREE-BODY DIAGRAMS Today s Objectives: Students will be able to: a) Identify support reactions, and, b) Draw a free-body
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA SCIENCE FOR TECHNICIANS OUTCOME 1 - STATIC AND DYNAMIC FORCES TUTORIAL 3 STRESS AND STRAIN
 EDEXCEL NATIONAL CERTIFICATE/DIPLOMA SCIENCE FOR TECHNICIANS OUTCOME 1 - STATIC AND DYNAMIC FORCES TUTORIAL 3 STRESS AND STRAIN 1 Static and dynamic forces Forces: definitions of: matter, mass, weight,
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA SCIENCE FOR TECHNICIANS OUTCOME 1 - STATIC AND DYNAMIC FORCES TUTORIAL 3 STRESS AND STRAIN 1 Static and dynamic forces Forces: definitions of: matter, mass, weight,
arxiv: v1 [math.mg] 4 Jun 2010
![arxiv: v1 [math.mg] 4 Jun 2010](/thumbs/95/126342819.jpg "arxiv: v1 [math.mg] 4 Jun 2010") The orbit rigidity matrix of a symmetric framework arxiv:1006.0788v1 [math.mg] 4 Jun 2010 Bernd Schulze Institute of Mathematics, MA 6-2 TU Berlin Strasse des 17. Juni 136, D-10623 Berlin, Germany and
The orbit rigidity matrix of a symmetric framework arxiv:1006.0788v1 [math.mg] 4 Jun 2010 Bernd Schulze Institute of Mathematics, MA 6-2 TU Berlin Strasse des 17. Juni 136, D-10623 Berlin, Germany and
Introduction to Determinants
 Introduction to Determinants For any square matrix of order 2, we have found a necessary and sufficient condition for invertibility. Indeed, consider the matrix The matrix A is invertible if and only if.
Introduction to Determinants For any square matrix of order 2, we have found a necessary and sufficient condition for invertibility. Indeed, consider the matrix The matrix A is invertible if and only if.
LECTURE 22: SWARM INTELLIGENCE 3 / CLASSICAL OPTIMIZATION
 15-382 COLLECTIVE INTELLIGENCE - S19 LECTURE 22: SWARM INTELLIGENCE 3 / CLASSICAL OPTIMIZATION TEACHER: GIANNI A. DI CARO WHAT IF WE HAVE ONE SINGLE AGENT PSO leverages the presence of a swarm: the outcome
15-382 COLLECTIVE INTELLIGENCE - S19 LECTURE 22: SWARM INTELLIGENCE 3 / CLASSICAL OPTIMIZATION TEACHER: GIANNI A. DI CARO WHAT IF WE HAVE ONE SINGLE AGENT PSO leverages the presence of a swarm: the outcome
Chapter 4 Deflection and Stiffness
 Chapter 4 Deflection and Stiffness Asst. Prof. Dr. Supakit Rooppakhun Chapter Outline Deflection and Stiffness 4-1 Spring Rates 4-2 Tension, Compression, and Torsion 4-3 Deflection Due to Bending 4-4 Beam
Chapter 4 Deflection and Stiffness Asst. Prof. Dr. Supakit Rooppakhun Chapter Outline Deflection and Stiffness 4-1 Spring Rates 4-2 Tension, Compression, and Torsion 4-3 Deflection Due to Bending 4-4 Beam
Course Overview. Statics (Freshman Fall) Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force
 Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force") Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures
Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures
Equilibrium of a Particle
 ME 108 - Statics Equilibrium of a Particle Chapter 3 Applications For a spool of given weight, what are the forces in cables AB and AC? Applications For a given weight of the lights, what are the forces
ME 108 - Statics Equilibrium of a Particle Chapter 3 Applications For a spool of given weight, what are the forces in cables AB and AC? Applications For a given weight of the lights, what are the forces
Advanced Vibrations. Elements of Analytical Dynamics. By: H. Ahmadian Lecture One
 Advanced Vibrations Lecture One Elements of Analytical Dynamics By: H. Ahmadian ahmadian@iust.ac.ir Elements of Analytical Dynamics Newton's laws were formulated for a single particle Can be extended to
Advanced Vibrations Lecture One Elements of Analytical Dynamics By: H. Ahmadian ahmadian@iust.ac.ir Elements of Analytical Dynamics Newton's laws were formulated for a single particle Can be extended to
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS
 EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and b) Recognize two-force members. In-Class
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and b) Recognize two-force members. In-Class
CS168: The Modern Algorithmic Toolbox Lecture #8: How PCA Works
 CS68: The Modern Algorithmic Toolbox Lecture #8: How PCA Works Tim Roughgarden & Gregory Valiant April 20, 206 Introduction Last lecture introduced the idea of principal components analysis (PCA). The
CS68: The Modern Algorithmic Toolbox Lecture #8: How PCA Works Tim Roughgarden & Gregory Valiant April 20, 206 Introduction Last lecture introduced the idea of principal components analysis (PCA). The
If the number of unknown reaction components are equal to the number of equations, the structure is known as statically determinate.
 1 of 6 EQUILIBRIUM OF A RIGID BODY AND ANALYSIS OF ETRUCTURAS II 9.1 reactions in supports and joints of a two-dimensional structure and statically indeterminate reactions: Statically indeterminate structures
1 of 6 EQUILIBRIUM OF A RIGID BODY AND ANALYSIS OF ETRUCTURAS II 9.1 reactions in supports and joints of a two-dimensional structure and statically indeterminate reactions: Statically indeterminate structures
Structural Dynamics Lecture Eleven: Dynamic Response of MDOF Systems: (Chapter 11) By: H. Ahmadian
 By: H. Ahmadian") Structural Dynamics Lecture Eleven: Dynamic Response of MDOF Systems: (Chapter 11) By: H. Ahmadian ahmadian@iust.ac.ir Dynamic Response of MDOF Systems: Mode-Superposition Method Mode-Superposition Method:
Structural Dynamics Lecture Eleven: Dynamic Response of MDOF Systems: (Chapter 11) By: H. Ahmadian ahmadian@iust.ac.ir Dynamic Response of MDOF Systems: Mode-Superposition Method Mode-Superposition Method:
Topology Optimization of Tensegrity Structures Based on Nonsmooth Mechanics. Yoshihiro Kanno. November 14, 2011 ACOMEN 2011
 Topology Optimization of Tensegrity Structures Based on Nonsmooth Mechanics Yoshihiro Kanno November 14, 2011 ACOMEN 2011 tensegrity definition tension + integrity [Fuller 75] [Emmerich], [Snelson] pin-jointed
Topology Optimization of Tensegrity Structures Based on Nonsmooth Mechanics Yoshihiro Kanno November 14, 2011 ACOMEN 2011 tensegrity definition tension + integrity [Fuller 75] [Emmerich], [Snelson] pin-jointed
, b = 0. (2) 1 2 The eigenvectors of A corresponding to the eigenvalues λ 1 = 1, λ 2 = 3 are
 1 2 The eigenvectors of A corresponding to the eigenvalues λ 1 = 1, λ 2 = 3 are") Quadratic forms We consider the quadratic function f : R 2 R defined by f(x) = 2 xt Ax b T x with x = (x, x 2 ) T, () where A R 2 2 is symmetric and b R 2. We will see that, depending on the eigenvalues
Quadratic forms We consider the quadratic function f : R 2 R defined by f(x) = 2 xt Ax b T x with x = (x, x 2 ) T, () where A R 2 2 is symmetric and b R 2. We will see that, depending on the eigenvalues
Chapter 2: Rigid Bar Supported by Two Buckled Struts under Axial, Harmonic, Displacement Excitation..14
 Table of Contents Chapter 1: Research Objectives and Literature Review..1 1.1 Introduction...1 1.2 Literature Review......3 1.2.1 Describing Vibration......3 1.2.2 Vibration Isolation.....6 1.2.2.1 Overview.
Table of Contents Chapter 1: Research Objectives and Literature Review..1 1.1 Introduction...1 1.2 Literature Review......3 1.2.1 Describing Vibration......3 1.2.2 Vibration Isolation.....6 1.2.2.1 Overview.
On the determinacy of repetitive structures
 Journal of the Mechanics and Physics of Solids 51 (2003) 383 391 www.elsevier.com/locate/jmps On the determinacy of repetitive structures S.D. Guest a;, J.W. Hutchinson b a Department of Engineering, University
Journal of the Mechanics and Physics of Solids 51 (2003) 383 391 www.elsevier.com/locate/jmps On the determinacy of repetitive structures S.D. Guest a;, J.W. Hutchinson b a Department of Engineering, University
UNIT IV FLEXIBILTY AND STIFFNESS METHOD
 SIDDHARTH GROUP OF INSTITUTIONS :: PUTTUR Siddharth Nagar, Narayanavanam Road 517583 QUESTION BANK (DESCRIPTIVE) Subject with Code : SA-II (13A01505) Year & Sem: III-B.Tech & I-Sem Course & Branch: B.Tech
SIDDHARTH GROUP OF INSTITUTIONS :: PUTTUR Siddharth Nagar, Narayanavanam Road 517583 QUESTION BANK (DESCRIPTIVE) Subject with Code : SA-II (13A01505) Year & Sem: III-B.Tech & I-Sem Course & Branch: B.Tech
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati
 Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Lecture 4: PRELIMINARY CONCEPTS OF STRUCTURAL ANALYSIS. Introduction
 Introduction In this class we will focus on the structural analysis of framed structures. We will learn about the flexibility method first, and then learn how to use the primary analytical tools associated
Introduction In this class we will focus on the structural analysis of framed structures. We will learn about the flexibility method first, and then learn how to use the primary analytical tools associated
Lecture 11: Differential Geometry
 Lecture 11: Differential Geometry c Bryan S. Morse, Brigham Young University, 1998 2000 Last modified on February 28, 2000 at 8:45 PM Contents 11.1 Introduction..............................................
Lecture 11: Differential Geometry c Bryan S. Morse, Brigham Young University, 1998 2000 Last modified on February 28, 2000 at 8:45 PM Contents 11.1 Introduction..............................................
AS and A level Further mathematics contents lists
 AS and A level Further mathematics contents lists Contents Core Pure Mathematics Book 1/AS... 2 Core Pure Mathematics Book 2... 4 Further Pure Mathematics 1... 6 Further Pure Mathematics 2... 8 Further
AS and A level Further mathematics contents lists Contents Core Pure Mathematics Book 1/AS... 2 Core Pure Mathematics Book 2... 4 Further Pure Mathematics 1... 6 Further Pure Mathematics 2... 8 Further
Lecture 0. Statics. Module 1. Overview of Mechanics Analysis. IDeALab. Prof. Y.Y.KIM. Solid Mechanics
 Lecture 0. Statics Module 1. Overview of Mechanics Analysis Overview of Mechanics Analysis Procedure of Solving Mechanics Problems Objective : Estimate the force required in the flexor muscle Crandall,
Lecture 0. Statics Module 1. Overview of Mechanics Analysis Overview of Mechanics Analysis Procedure of Solving Mechanics Problems Objective : Estimate the force required in the flexor muscle Crandall,
Unit M1.5 Statically Indeterminate Systems
 Unit M1.5 Statically Indeterminate Systems Readings: CDL 2.1, 2.3, 2.4, 2.7 16.001/002 -- Unified Engineering Department of Aeronautics and Astronautics Massachusetts Institute of Technology LEARNING OBJECTIVES
Unit M1.5 Statically Indeterminate Systems Readings: CDL 2.1, 2.3, 2.4, 2.7 16.001/002 -- Unified Engineering Department of Aeronautics and Astronautics Massachusetts Institute of Technology LEARNING OBJECTIVES
Structural Dynamics Lecture 4. Outline of Lecture 4. Multi-Degree-of-Freedom Systems. Formulation of Equations of Motions. Undamped Eigenvibrations.
 Outline of Multi-Degree-of-Freedom Systems Formulation of Equations of Motions. Newton s 2 nd Law Applied to Free Masses. D Alembert s Principle. Basic Equations of Motion for Forced Vibrations of Linear
Outline of Multi-Degree-of-Freedom Systems Formulation of Equations of Motions. Newton s 2 nd Law Applied to Free Masses. D Alembert s Principle. Basic Equations of Motion for Forced Vibrations of Linear
Rigidity of Graphs and Frameworks
 School of Mathematical Sciences Queen Mary, University of London England DIMACS, 26-29 July, 2016 Bar-and-Joint Frameworks A d-dimensional bar-and-joint framework is a pair (G, p), where G = (V, E) is
School of Mathematical Sciences Queen Mary, University of London England DIMACS, 26-29 July, 2016 Bar-and-Joint Frameworks A d-dimensional bar-and-joint framework is a pair (G, p), where G = (V, E) is
Rigid Geometric Transformations
 Rigid Geometric Transformations Carlo Tomasi This note is a quick refresher of the geometry of rigid transformations in three-dimensional space, expressed in Cartesian coordinates. 1 Cartesian Coordinates
Rigid Geometric Transformations Carlo Tomasi This note is a quick refresher of the geometry of rigid transformations in three-dimensional space, expressed in Cartesian coordinates. 1 Cartesian Coordinates
Chapter 6: Structural Analysis
 Chapter 6: Structural Analysis Chapter Objectives To show how to determine the forces in the members of a truss using the method of joints and the method of sections. To analyze the forces acting on the
Chapter 6: Structural Analysis Chapter Objectives To show how to determine the forces in the members of a truss using the method of joints and the method of sections. To analyze the forces acting on the
Forces. Name and Surname: Class: L E A R N I N G O U T C O M E S. What is a force? How are forces measured? What do forces do?
 F O R C E S P A G E 1 L E A R N I N G O U T C O M E S Forces What is a force? Y E A R 9, C H A P T E R 2 G J Z A H R A B. E D ( H O N S ) How are forces measured? What do forces do? Why do we need to think
F O R C E S P A G E 1 L E A R N I N G O U T C O M E S Forces What is a force? Y E A R 9, C H A P T E R 2 G J Z A H R A B. E D ( H O N S ) How are forces measured? What do forces do? Why do we need to think
Functions of Several Variables
 Jim Lambers MAT 419/519 Summer Session 2011-12 Lecture 2 Notes These notes correspond to Section 1.2 in the text. Functions of Several Variables We now generalize the results from the previous section,
Jim Lambers MAT 419/519 Summer Session 2011-12 Lecture 2 Notes These notes correspond to Section 1.2 in the text. Functions of Several Variables We now generalize the results from the previous section,
three point equilibrium and planar trusses Equilibrium Equilibrium on a Point Equilibrium on a Point
 RHITETURL STRUTURES: FORM, EHVIOR, N ESIGN R. NNE NIHOLS SUMMER 2014 lecture three Equilibrium balanced steady resultant of forces on a particle is 0 X point equilibrium and planar trusses http:// nisee.berkeley.edu/godden
RHITETURL STRUTURES: FORM, EHVIOR, N ESIGN R. NNE NIHOLS SUMMER 2014 lecture three Equilibrium balanced steady resultant of forces on a particle is 0 X point equilibrium and planar trusses http:// nisee.berkeley.edu/godden