Dynamics and Hydrodynamics of High Speed Craft
|
|
|
- Anabel Wilkinson
- 5 years ago
- Views:
Transcription
1 PASI 2010 in Dynamics and Control of Manned and Unmanned Marine Vehicles , Naval Architecture and Marine Engineering
2 OUTLINE Planing Hull Hydrodynamics and Dynamics Selected experiments and theories with practical applications Nonlinear Dynamics Analysis Applied to Planing Hulls Stochastic Vibro-Impact Model for Extreme Planing Craft Acceleration Estimation
3 With a little help from friends: Recently Active UM Graduates: Dr. Lixin Xu Dr. Carolyn Frank Judge Wayne Arguin (USCG) Timothy Conners (USCG) Dr. Richard Royce Tony Daniels Dr. Kevin Maki Dr. Brant Savander Oscar Tuscan (Dr. to-be) Fredy Zarate And many more.
4 Planing and Impact Research at UM Kang, K.G. (1988) Non-linear Impact Hydrodynamics. Ph.D. Thesis. Talmor, A. (1991) Non-linear Slender-Body Approach for Predicting Planing Performance, Ph.D. Thesis. Hicks, J.D. (1993) Analysis Method for Planing Hull Vertical Motions. Professional Degree Thesis. Lai, C. (1994) Hydrodynamic and Dynamic Analysis of High Speed Planing, Ph.D. Thesis. Akers, R.H. (1995) Planing Hull Design Environment. Professional Degree Thesis. Wang, M. (1995) A Study on Non-linear Free Surface Flows. Ph.D. Thesis. Savander, B.R. (1997) Planing Hull Steady Hydrodynamics. Ph.D. Thesis. Xu, L. (1998) A Theory for Asymmetric Vessel Impact and Steady Planing. Ph.D. Thesis. Judge, C.F. (2000) Impact of Wedges with Horizontal and Vertical Velocities. Ph.D. Thesis. Arguin, W. (2001) Simulation of Planing Hull Dynamics in the Transverse Plane. MSE Thesis. Conners, T. (2001) Coupled Surge, Sway, Roll, and Yaw Hydrodynamic Coefficients for High Speed Planing Craft. MSE Thesis. Royce, R.A. (2001) Impact Theory Extended to Planing Craft with Experimental Comparisons. Ph.D. Thesis. Daniels, A.S. (2002) Design and Construction of the Stepped Planing Hull Dynamometer. Professional Degree Thesis. Maki, K. (2005) Transom Stern Hydrodynamics, Ph.D. Thesis. Tascon, O. (2010) Numerical Computation of the Hydrodynamic Forces Acting on a Maneuvering Planing Hull via Slender Body Theory - SBT and 2-D CFD Impact Theory. Ph.D. Thesis Rose, C. J. (2010) Marine Systems Application of Extreme Value Prediction of a Vibro-Impact System Subject to Stochastic Excitation, MSE Thesis Zarate, F. (2010) CFD Modeling of Yawed and Heeled High Speed Planing Hulls, MSE Thesis
5 Selected References Troesch, A.W. and Kang, C.-G. (1986) "Hydrodynamic Impact Loads on Three Dimensional Bodies," Proceedings of the 16th Symposium on Naval Hydrodynamics, Berkeley, July. Troesch, A. and Falzarano, J. (1993) "Modern Nonlinear Dynamical Analysis of Vertical Plane Motion of Planing Hulls," Journal of Ship Research, September, pp Troesch, A. and Hicks, J.D. (1994) "The Efficient Use of Simulation in Planing Hull Motion Analysis," Naval Engineers Journal, January, pp Lai, Canhai and Troesch, A.W. (1995) "Modelling Issues Related to the Hydrodynamics of Three Dimensional Steady Planing," Journal of Ship Research, Vol. 39, No. 1 March. Hicks, J.D., Troesch, A.W. and Jiang, C. (1995) "Simulation and Nonlinear Dynamics of Planing Hulls," Journal of Offshore Mechanics and Arctic Engineering, Vol. 117, No. 1, February. Vorus, W.S. (1996) A flat cylinder impact theory for analysis of vessel impact loading and steady planing resistance. Journal of Ship Research, Vol. 40, No. 2, pp Kim, D. J., Vorus, W. S., Troesch, A.W., and Gollwitzer, R. M. (1996) "Coupled Hydrodynamic Impact and Elastic Response," Proceedings of the 21th Symposium on Naval Hydrodynamics, Norway, June. Lai, Canhai and Troesch, A.W. (1996) "A Vortex Lattice Method for High Speed Planing," International Journal for Numerical Methods in Fluids, Vol. 22,, pp Xu, L., Troesch, A. W., and Vorus, W. S. (1998) "Asymmetric Vessel Impact and Planing Hydrodynamics," Journal of Ship Research, Vol.42, 5. September. Akers, R.H., Hoeckley, S. A. Peterson, R. S., and Troesch, A. W. (1999) "Predicted vs Measured Vertical-Plane Dynamics of a Planing Boat, " Proceedings of FAST 99, Seattle, WA. Sept.. Savander, B.R., Scorpio, S.M., and Taylor, R.K. (2002) "Steady Hydrodynamic Analysis of Planing Surfaces. " Journal of Ship Research, Vol. 46, No. 4. Judge, C., Troesch, A. W., and Perlin, M. (2003 ) "Initial Water Impact of a Wedge at Vertical and Oblique Angles." Invited contribution for a Special Issue on Water Impact in the Journal of Engineering Mathematics. Maki, K. J., Troesch, A. W. and Beck, R. F. "Experiments of Two-Dimensional Transom Stern Flow," Journal of Ship Research, Vol. 52, No.4, Dec. 2008, pp Hamza, Karim, Troesch A.W., Saitou, K., "Design of an Instrument Shock Isolator for a High Speed Marine Vehicle via a Multi-Objective Genetic Algorithm, " IEEE World Congress on Computational Intelligence (Special Session on Evolutionary Computation for Expensive Optimization Problems), July 16-21, 2006, Vancouver, BC, Canada Savander, B. and Troesch, A., "Mission Configurable Modular Craft Concept Study", Proceedings of 1st International Conference on Ship Design and Naval Engineering, March 2009, Cartagena de Indias, Colombia. Tascon, O., Troesch, A., Maki, K., "Numerical Computation of the Hydrodynamics Forces Acting on a Maneuvering Planing Hull via Slender Body Theory SBT and 2-D Impact Theory," 10th International Conference on Fast Sea Transportation, FAST 2009, Athens, Greece, October, 2009
6 Planing Craft Resistance and Dynamics


7 Planing Craft Resistance and Dynamics Steps

8 Design & Analysis Process Overview Steady (?) Hydrodynamic Analysis Total Pressure Coefficient Defines global geometry 9.0 Defines weight distribution Defines operating parameters Seakeeping/ Maneuvering Analysis y/z ch x/z ch Y X Z C p Defines structural loading z/z ch Defines operability boundaries Structures Quasi-Static & Transient Primary, Secondary, Tertiary Fatigue Life (Endurance Limit) Fracture Mechanics (Module Dis-assembly)
 Propulsion")

9 Planing Hull Design given Hull Particulars (target) Propulsion Characteristics Environment? Analysis Steady Performance? Unsteady Performance Prototype
 Spray Area")

10 Underwater Photograph of a Planing Hull David Taylor Model Basin: Model 4434 Pressure Area (solid water) Spray Area Saunders, H.E. Hydrodynamics in Ship Design. Vol. 1. The Society of Naval Architects and Marine Engi neers, New York, 1957.




11 Physics of Planing - Some Definitions Jet Jet head Calm waterline Jet edge Wetted chine Dry chine


12 Physics of Planing - Some definitions and idealizations Slender, low aspect ratio, prismatic hulls: Wagner (1931, 1932), von Karman (1929)


13 Physics of Planing - Some definitions and idealizations High aspect ratio, flat hulls: Green (1936)



14 Physics of Planing - Some definitions and idealizations Slender, low aspect ratio, flat hulls: Tulin (1957)
15 Physics of Planing - Force and moment balance Ref: Experiments of prismatic planing hulls, Savitsky (1964)
16 Relationship between planing and impact hydrodynamics Low order approximation Coordinate transformation between time and longitudinal coordinate X = U t Transverse plane is equivalent to 2-D impact or strip theory approximation of planing

")
17 Seminal Work in Impact Hydrodynamics, Wagner (1932) Model:
 y wl ( x) z V( x) z b ( x) Approximation Planing surface passing through earth-fixed plane v = φ y w = φ z y v n body, = v n fluid, C p ( z) = 0 vz ( ) z Slender Body Theory Planing")
18 Reduction of physical model to 2-D impact solution space y Z ch ( x) Hull Cross Section Geometry β( xz, ) hxz (, ) h o ( xz, ) y wl ( x) z y Flow Physics v w z c ( x ) v n ( z) C p ( z) v s ( z) v jet v s ( z) y wl ( x) z V( x) z b ( x) Approximation Planing surface passing through earth-fixed plane v = φ y w = φ z y v n body, = v n fluid, C p ( z) = 0 vz ( ) z Slender Body Theory Planing Model, Savander, et al. (2002) γ( z) = 2w( z) 0 γ = w = 0
19 The Boundary Value Problem Nonlinear dynamic free surface boundary condition ( V s z cτ ζ) V s ζ + z dv s c dτ = 0 Body kinematic boundary condition γ c ( ζ, τ) = 2cosβ ( ζ,τ)ζκ ( ζ, τ ) 1 ζ 2 V()+ τ 1 π + ζ2 1 π b( τ) s=1 γ s ( s,τ)ds κ( s, τ) s ζ b() τ b( τ) s=1 ( )( s 2 ζ 2 ) γ s ( s,τ)ds ( ) κ( s, τ) s z z c ( τ)
20 The Boundary Value Problem, con t. Velocity continuity condition (i.e. Kutta condition) V()+ τ 1 π b γ s ( s,τ)ds at z = zc(z = 1) s=1 κ( s, τ) s 2 = 0 1 ( ) Total Pressure Coefficient Displacement continuity condition Y wl ( τ)= 2 π 1 s=0 cos β ( s,τ)h c ( s, τ)ds κ( s, τ) 1 s y/z ch Y x/z ch X Z 7.0 C p z/z ch
 0.091 C L (USAERO) 0.053 o θ 0 (z=0) 23.29 o θ (USAERO) 29.")

21 3-D Pressure Distribution and Spray Sheet Brown&Martin Vorus&Lai Usaero z=0 Spray Root Keel C L (Savitsky) C L (USAERO) o θ 0 (z=0) o θ (USAERO) o θ (Vorus&Lai) o θ (Brown&Martin) λ = 0.913, τ = 9, β = 20 o o Variable deadrise 40 mph ski boat Calculations based on 3-D boundary integral method (Savander, 1997)
 Analysis: Straight Line Running Bass Boat Down Angle")

 20 15 10 5 0-5 0 5 10 15 20 25 30 35")

22 FLUENT 6.1 (CFD) Analysis: Straight Line Running Bass Boat Down Angle Lifting Strake Included FLUENT 6.0 2d, Segregated, VOF Lam, Unsteady 30 Time = sec U=50mph τ =1.74deg x=11.0ft 25 Transverse Transom: 50 mph Engine Trim ¼ Out Straight Line y (inches) x (inches) Starboard Transom of Bass Boat Section Bottom Pressure Comparison Ideal Flow Solution Pressure (psi) 0.5 β = 12 deg 0.0 FLUENT x (inches)
23 Conclusions of planing modeling analysis (the more significant ones?) Modeling the jet separation point (line) is critical to accurate planing predictions. Prediction of the correct wetted surface is critical to accurate planing predictions. There may be significant non-slender effects for large θ. The reduction to the z=0 plane works well in the chines dry regime but less so in the chines wet regime. Both slender body theory and 3-D Models have the potential to predict steady lift and drag accurately enough for design purposes.
 Low pressure region in chines wet impact Calculated variation of deadrise to achieve maximum lift to drag ratio Plan View high pressure low")
24 Validation and Application of Technology Extension of 2-D Planing Theory to Innovative Hull Form Design (a) High pressure region in chines dry impact (b) Low pressure region in chines wet impact Calculated variation of deadrise to achieve maximum lift to drag ratio Plan View high pressure low pressure

25 Validation and Application of Technology SOLAR SPLASH: Intercollegiate Solar/Electric Boat Regatta featuring The s Inverted V Planing Hull
26 OUTLINE Planing Hull Hydrodynamics and Dynamics Selected experiments and theories with practical applications Nonlinear Dynamics Analysis Applied to Planing Hulls Stochastic Vibro-Impact Model for Extreme Planing Craft Acceleration Estimation
27 RATIONALE FOR DYNAMIC ANALYSIS: Identification of design parameters that are critical to performance. Title Example: A Case Study of Dynamic Instability in a Planing Hull, Codega and Lewis. Marine Tech., April, 1987
28 Problem Definition : Steady Symmetric Planing attached chines dry pressure distribution separated chines wet
29 Problem Definition : Steady Asymmetric Planing - Type A attached chines dry separated chines dry/wet
30 Problem Definition : Steady Asymmetric Planing - Type B keel separation/attached keel separation/chines dry


31 Transition to Steady Asymmetric Planing - Type B
32 Steady Transverse Planing Modeling: Asymmetric Impact Theory U ( t) V 2D W ( t) W 2D ( x) ( x) Type B (U/W = 0.4) Type A (U/W = 0.4) Critical angle β2 versus the corresponding β1 at which ventilation occurs off the keel for different ratios of impact velocities (Judge et al, 1999 Xu et al, 1998, 1999)


33 Steady Transition to asymmetric planing - Type B 35 deg deadrise heeled 20 deg 35 deg deadrise heeled 29 deg



34 Jet Root Keel Jet Root Jet Root Keel Jet Root V/U = 0.52 V/U = 1.30 V/U = 2.08 Jet Root Keel Jet Root Onset of Separation Due to Transverse Velocity Direction of V
35 Steady Asymmetric planing due to horizontal velocity W Estimate of the horizontal velocity required for separation: V j V V W V j W sinβ j tanβ 1 cosβ j tanβ 1 β j β 1 β 1 V/W 20 o o Ref: Xu, Troesch, 1999 and Judge, et al. 2002
36 The Synergy of Experiments and Theory Experiments with prismatic hull forms Steady planing Unsteady planing - vertical plane motions For example: Savitsky (1964), Altman (1968), Fridsma (1969, 1971), De Zwaan (1976), Savitsky & Brown (1976), Troesch (1992), and others.








37 On the Hydrodynamics of Vertically Oscillating Planing Hulls
38 Z = m η 3 (t) M = I 55 η 5 (t) May be Modeled as [ m + A(η;ω) ]{ η (t)}+ B(η;ω) [ ] [ ] η(t) { η (t)}+ C(η) { }= { F(t) }
39 Geometry: Dynamic wetted length L(t) = lcg + ( ) ( z wl +η 3 (t)) sin( τ η 5 (t)) vcg tan τ η 5 (t) λ ave = ( λ k +λ c ) λ ˆ k = λ ˆ ave + 0.5( β) ( tan β (2 tan(τ η 5 )) 0.006β) 0.03 λ ˆ c = λ ˆ k ( β )( tanβ (2tan(τ η 5 )) 0.006β) for λ ˆ c 1 Steady mean wetted length from Savitsky (1964)and Savitsky & Brown (1976) modified for motions (Troesch 1992)

40 Geometry: Dynamic wetted length in heave Wetted keel Wetted chine Top of stroke Wetted keel Bottom of stroke


41 Geometry: Dynamic wetted length in heave Top of stroke Bottom of stroke
42 Geometry: Dynamic wetted length Wetted length Forced static heave Forced static pitch x x x x x x x η 3 B Wetted length x x x x x x x η 5 (deg) Wetted length versus constant heave and pitch displacement. - -, λave; - - -, Eq. (5); - -, λk;, Eq. (6); - -, λc ; - - -, Eq. (7).
43 Geometry Dynamic wetted length Forced heave Forced pitch Wetted length Wetted length 2π tt 2π tt Wetted length during one cycle of heave and pitch oscillation. ξ 3 /B = 0.036, ω Bg= , λ c ; - - -, Eq. (4);, λ k ;, Eq. (4).
44 Geometry: Dynamic wetted length Forced heave 4 6 Chine Wetted length x x x x x x ζ 3 B x Keel Wetted length x x x x x x ζ 3 B x Wetted maximum and minimum chine and keel lengths as a function of heave amplitude. - -, λ max;, Eq. (4); - -, λ min; - - -, Eq. (4); - -, λave
45 Geometry: Dynamic wetted length Forced pitch 4 7 Chine Wetted length x x x x x x x x x x Keel Wetted length x x x x x x x x ζ 5 (deg) ζ 5 (deg) Wetted maximum and minimum chine and keel lengths as a function of pitch amplitude. - -, λ max;, Eq. (4); - -, λ min; - - -, Eq. (4); - -, λave.
46 Hydrodynamic stiffness, C 55 and C 33 Forced pitch Forced heave F 5 ρ V 2 B η 5 (deg) F 3 ρ V 2 B η 3 B : Total vertical force and moment versus constant linear heave and pitch displacement. L/B = 3.0, τ = 4.0 deg. Cv = 1.5; - -, exp; ; Savitsky [14]. Cv = 2.5; - -, exp; - - -, Savitsky [14].
47 Hydrodynamic stiffness, C 35 and C 53 Forced pitch Forced heave F 3 ρ V 2 B F 5 ρ V 2 B η 5 (deg) η 3 B : Total vertical force and moment versus constant linear heave and pitch displacement. L/B = 3.0, τ = 4.0 deg. Cv = 1.5; - -, exp; ; Savitsky [14]. Cv = 2.5; - -, exp; - - -, Savitsky [14].
48 Added mass and damping, A 33 and B 33 ω 2 ( m + A 33 )+ iωb 33 + C 33 = f 1 + f 2 ( ) ζ 3 => F = m ω 2 ( mx cg + A 53 )+ iωb 53 + C 53 = ( f 1 f 2 )L ζ 3 => M = 0 ζ 3 Which reduce to A 33 = ( ) 1 mag f 1 + f 2 ω 2 mag( ζ 3 ) cos( arg( f 1 + f 2 ) arg( ζ 3 )) C 33 m B 33 = 1 ω ( ) mag f 1 + f 2 mag( ζ 3 ) ( ( )) sin arg( f 1 + f 2 ) arg ζ 3
49 Added mass and damping, A 33 and B 33 Heave Damping due to Heave Heave Added Mass due to Heave ω B g ω B g Added mass and damping coefficients in heave versus frequency L/B = 4.0; τ = 6 deg. - -, Cv = 1.5; - -, Cv = 2.0; - -, Cv = 2.5.
50 Conclusions of forced motion experiments Wetted length: The wetted length and equivalently the wetted surface of an oscillating planing hull is strongly time dependent. For low to moderate amplitudes of motion, the keel wetted length can be treated kinematically as the intersection between the keel and a stationary free surface. The chine wetted length is influenced by spray jet dynamics.
51 Conclusions of forced motion experiments (con t.) Restoring force matrix, C. The restoring force matrix is amplitude dependent. A good approximation for prismatic hulls can be found by applying the results of Savitsky [14] with the mean wetted, λ, and effective trim expressed as functions of the heave and pitch motions.
52 Conclusions of forced motion experiments (con t.) Added mass and damping matrices, A and B. For low to moderate planing speeds, Cv= , the added mass coefficient, and to a lesser extent the damping coefficient, can be frequency dependent. When the experimental results were analyzed using a constant restoring force matrix, the added mass and damping in heave, Aj3 and Bj3, j=3,5 showed relatively little amplitude dependency compared to the added mass and damping in pitch, Aj5 and Bj5, j=3,5.
53 Planing Hull Design given Hull Particulars (target) Propulsion Characteristics Environment? Analysis Steady Performance? Unsteady Performance Prototype

54 RATIONALE FOR DYNAMIC ANALYSIS: Identification of design parameters that are critical to performance. Title Example: A Case Study of Dynamic Instability in a Planing Hull, Codega and Lewis. Marine Tech., April, 1987
55 THE ROLE OF SIMULATION IN DESIGN With regards to the new computer simulators... "If you choose the right parameters, your simulated experiment will normally work just like the corresponding real-world experiment. (However,) there are some edges to this simulated world, and if you step over the simulation breaks down badly..." (Swaine, 1992)
56 Analysis and Simulation of Nonlinear Planing Hull Dynamics General description of methods of modern nonlinear systems analysis Examples of analysis Ref: Troesch and Falzarano (1993), Troesch and Hicks (1994) Hicks, Troesch and Jiang (1995)
57 Analysis and Simulation of Nonlinear Planing Hull Dynamics Simple Model - Complex Dynamics Ref: Savitsky (1964) Guckenheimer and Holmes (1983) Thompson and Stewart (1986) Seydel (1988) Troesch (1992) Troesch and Falzarano (1993)
58 Analysis and Simulation of Nonlinear Planing Hull Dynamics Complex Model - Complex Dynamics Ref: Zarnick (1978) Guckenheimer and Holmes (1983) Seydel (1988) Akers et al. (1999, etc.) Hicks et al. (1994, 1995)
59 VERTICAL PLANE EQUATIONS OF MOTION Linear (unforced) (Martin, 1978) [ A] { η (t)}+ B Equivalent nonlinear model (unforced) (Hicks et al, 1994) [ A] { η (t)}+ B [ ] [ ] Equivalent nonlinear model (forced) (Hicks et al, 1994) [ A] { η (t)}+ B { η (t)}+ C { η (t)}+ C (η (t)) [ ] [ ] η (t) { }= 0 [ ] η (t) { η (t)}+ C (η (t)) { }= 0 [ ] η (t) { }= F(t) { } Fully nonlinear simulation (forced) (Zarnick, 1978, Akers, 1994) [ M] { η (t)}= F(t) { } {} {}






60
 2.03 (c) 1.98 C v = 4.")
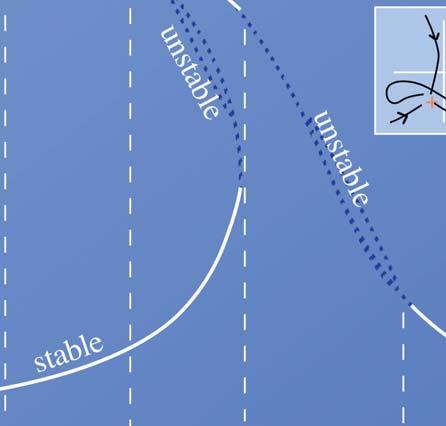
61 SIMULATION: TRANSITION TO PORPOISING lcg/b (a) 2.09 (b) 2.03 (c) 1.98 C v = 4.5 (Troesch and Hicks, 1994)






62
63 EQUATIONS OF MOTION Linear (unforced) (Martin, 1978) [ A] { η (t)}+ B Equivalent nonlinear model (unforced) (Hicks et al, 1994) [ A] { η (t)}+ B [ ] [ ] Equivalent nonlinear model (forced) (Hicks et al, 1994) [ A] { η (t)}+ B { η (t)}+ C { η (t)}+ C (η (t)) [ ] [ ] η (t) { }= 0 [ ] η (t) { η (t)}+ C (η (t)) { }= 0 [ ] η (t) { }= F(t) { } Fully nonlinear simulation (forced) (Zarnick, 1978, and Akers, 1999, etc.) [ M] { η (t)}= F(t) { } {} {}




64
 t T")

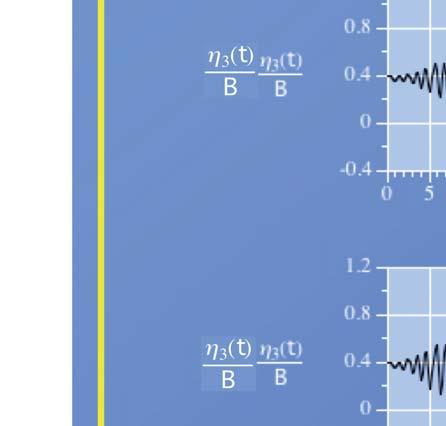
65 η 3 (t) B SIMULATED FORCED RESPONSE 2T e (Troesch and Hicks, 1994) t T e η 5 (t) (deg) 2T e C v =4.5 ς o B =0.15 λ L =2.40 ω e B g =2.29 t T e
66 OUTLINE Planing Hull Hydrodynamics and Dynamics Selected experiments and theories with practical applications Nonlinear Dynamics Analysis Applied to Planing Hulls Stochastic Vibro-Impact Model for Extreme Planing Craft Acceleration Estimation
67 Full Scale MARK V Acceleration Time Histories MARK V deck & seat frame acceleration data collected January 10, 2003 by NSWC-PC. Sea Trial conditions: 3.0 ft significant wave height, 8.3 second wave period
68 Extreme Responses in Stochastic Design Environments Statistics of Impact Simulated Mark V Acceleration at Bow and Bending Moment (Sea State 2) 2 Bow Acceleration(G) E+06-2 Bending Mo ment (PowerSEA) Bending Mo ment: Calm Water (SHIPMO) Bending Mo ment: Calm Water + RMS (SHIPMO) Bending M oment (lbs- ft) 1E Time (sec) 0-1E
69 Stochastic Vibro-Impact Model for Extreme Planing Craft Acceleration Estimation


70 Stochastic Vibro-Impact Model Parametric Hardening Spring



71 Ensemble of Band-limited Forcing
 Q x = log 10 (ξ) ( ) Q y = log 10")
72 Extreme Value Statistics Background Elevation PDF Maxima PDF Quantile-Quantile Plot (Weibull Space) Q x = log 10 (ξ) ( ) Q y = log 10 log 10 ( 1 P(ξ) )
73 Stochastic Vibro-Impact Model ζ=0.5, η=0.5, γ=1.0, ε=0.5 Quantile-Quantile Plot (Weibull Space) ζ=0.5 (damping ratio), η=0.5(central forcing freq.), γ=1.0(wall stiffness)


74 Stochastic Vibro-Impact Model for Extreme Planing Craft Acceleration Estimation - Application
75 Stochastic Vibro-Impact Model for Extreme Planing Craft Acceleration Estimation Quantile-Quantile Plot (Weibull Space) Extreme Acceleration Estimates H 1/ g 50 g ft yr 2.1 g 4.9 g 4 ft g 52 g 6 ft g 254 g
76 Summary Planing Hull Hydrodynamics and Dynamics Selected experiments and theories with practical applications - Complex coupled hydrodynamics and dynamics - Appendages play large role in assessing performance - Steady hydrodynamics relatively mature. Big challenge is resolving jet kinematics and geometry - Linear theory can be of use in assessing stability boundaries
77 Summary Nonlinear Dynamics Analysis Applied to Planing Hulls - Problem is rich in interesting dynamics and hydrodynamics - Reduced order nonlinear modeling required to understand global dynamics - Need to understand underlying physics to support brute force Monte Carlo simulations - Role that high fidelity simulators play in design and design optimization is not clear
78 Summary Stochastic Vibro-Impact Model for Extreme Planing Craft Acceleration Estimation - Traditional stochastic analysis assumptions for planing dynamics may be invalid - Extreme values of planing dynamics are the result of highly nonlinear, non-gaussian processes - Reduced order models have important place in understanding extreme values





79 QUESTIONS???
PARAMETRICALLY EXCITED TRANSVERSE PLANE INSTABILITIES ON HIGH SPEED PLANING HULLS
 PARAMETRICALLY EXCITED TRANSVERSE PLANE INSTABILITIES ON HIGH SPEED PLANING HULLS by Oscar Darío Tascón Muñoz A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor
PARAMETRICALLY EXCITED TRANSVERSE PLANE INSTABILITIES ON HIGH SPEED PLANING HULLS by Oscar Darío Tascón Muñoz A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor
Research and application of 2-D water entry simulation (constant velocity)
") Research and application of 2-D water entry simulation (constant velocity) College of Shipbuilding and Engineering Harbin Engineering University ------------- Zhu Xin Supervisor: Prof. Duan Wen-yang 1
Research and application of 2-D water entry simulation (constant velocity) College of Shipbuilding and Engineering Harbin Engineering University ------------- Zhu Xin Supervisor: Prof. Duan Wen-yang 1
Hydrodynamic Modeling of Planing Boats with Asymmetry and Steady Condition.
 Hydrodynamic Modeling of Planing Boats with Asymmetry and Steady ondition. R. Algarín. & O. Tascón otecmar, artagena, olombia ABSTRAT: This paper shows a hydrodynamic study of planing crafts, monohull
Hydrodynamic Modeling of Planing Boats with Asymmetry and Steady ondition. R. Algarín. & O. Tascón otecmar, artagena, olombia ABSTRAT: This paper shows a hydrodynamic study of planing crafts, monohull
Nonlinear Feedback Stabilization of High-Speed Planing Vessels by A Controllable Transom Flap
 2 American Control Conference June 8-1, 2. Portland, OR, USA FrB11.2 Nonlinear Feedback Stabilization of High-Speed Planing Vessels by A Controllable Transom Flap Handa Xi and Jing Sun Department of Naval
2 American Control Conference June 8-1, 2. Portland, OR, USA FrB11.2 Nonlinear Feedback Stabilization of High-Speed Planing Vessels by A Controllable Transom Flap Handa Xi and Jing Sun Department of Naval
A UNIFIED MATHEMATICAL MODEL FOR HIGH SPEED HYBRID (AIR AND WATER-BORNE) VEHICLES
 VEHICLES") A UNIFIED MATHEMATICAL MODEL FOR HIGH SPEED HYBRID (AIR AND WATER-BORNE VEHICLES Maurizio Collu, Minoo H Patel, Florent Trarieux, Cranfield University, United Kingdom SUMMARY During the last two decades,
A UNIFIED MATHEMATICAL MODEL FOR HIGH SPEED HYBRID (AIR AND WATER-BORNE VEHICLES Maurizio Collu, Minoo H Patel, Florent Trarieux, Cranfield University, United Kingdom SUMMARY During the last two decades,
Seakeeping Models in the Frequency Domain
 Seakeeping Models in the Frequency Domain (Module 6) Dr Tristan Perez Centre for Complex Dynamic Systems and Control (CDSC) Prof. Thor I Fossen Department of Engineering Cybernetics 18/09/2007 One-day
Seakeeping Models in the Frequency Domain (Module 6) Dr Tristan Perez Centre for Complex Dynamic Systems and Control (CDSC) Prof. Thor I Fossen Department of Engineering Cybernetics 18/09/2007 One-day
1 POTENTIAL FLOW THEORY Formulation of the seakeeping problem
 1 POTENTIAL FLOW THEORY Formulation of the seakeeping problem Objective of the Chapter: Formulation of the potential flow around the hull of a ship advancing and oscillationg in waves Results of the Chapter:
1 POTENTIAL FLOW THEORY Formulation of the seakeeping problem Objective of the Chapter: Formulation of the potential flow around the hull of a ship advancing and oscillationg in waves Results of the Chapter:
Trajectory Tracking of a Near-Surface Torpedo using Numerical Methods
 ISSN (Print) : 2347-671 An ISO 3297: 27 Certified Organization Vol.4, Special Issue 12, September 215 Trajectory Tracking of a Near-Surface Torpedo using Numerical Methods Anties K. Martin, Anubhav C.A.,
ISSN (Print) : 2347-671 An ISO 3297: 27 Certified Organization Vol.4, Special Issue 12, September 215 Trajectory Tracking of a Near-Surface Torpedo using Numerical Methods Anties K. Martin, Anubhav C.A.,
ROLL MOTION OF A RORO-SHIP IN IRREGULAR FOLLOWING WAVES
 38 Journal of Marine Science and Technology, Vol. 9, o. 1, pp. 38-44 (2001) ROLL MOTIO OF A RORO-SHIP I IRREGULAR FOLLOWIG WAVES Jianbo Hua* and Wei-Hui Wang** Keywords: roll motion, parametric excitation,
38 Journal of Marine Science and Technology, Vol. 9, o. 1, pp. 38-44 (2001) ROLL MOTIO OF A RORO-SHIP I IRREGULAR FOLLOWIG WAVES Jianbo Hua* and Wei-Hui Wang** Keywords: roll motion, parametric excitation,
SCALE MODEL TESTS OF A FISHING VESSEL IN ROLL MOTION PARAMETRIC RESONANCE
 N. Perez Síntesis Tecnológica. V.3 Nº 1 (26) 33-37 SCALE MODEL TESTS OF A FISHING VESSEL IN ROLL MOTION PARAMETRIC RESONANCE NELSON A. PEREZ M. Instituto de Ciencias Navales y Marítimas, M.Sc, nperez@uach.cl,
N. Perez Síntesis Tecnológica. V.3 Nº 1 (26) 33-37 SCALE MODEL TESTS OF A FISHING VESSEL IN ROLL MOTION PARAMETRIC RESONANCE NELSON A. PEREZ M. Instituto de Ciencias Navales y Marítimas, M.Sc, nperez@uach.cl,
Fluid-structure interaction during ship slamming
 Fluid-structure interaction during ship slamming Kevin Maki Dominic J. Piro Donghee Lee Department of Naval Architecture and Marine Engineering University of Michigan Fifth OpenFOAM Workshop June 21-24
Fluid-structure interaction during ship slamming Kevin Maki Dominic J. Piro Donghee Lee Department of Naval Architecture and Marine Engineering University of Michigan Fifth OpenFOAM Workshop June 21-24
Development of formulas allowing to predict hydrodynamic responses of inland vessels operated within the range of navigation 0.6 Hs 2.
 Gian Carlo Matheus Torres 6 th EMship cycle: October 2015 February 2017 Master Thesis Development of formulas allowing to predict hydrodynamic responses of inland vessels operated within the range of navigation
Gian Carlo Matheus Torres 6 th EMship cycle: October 2015 February 2017 Master Thesis Development of formulas allowing to predict hydrodynamic responses of inland vessels operated within the range of navigation
Mooring Model for Barge Tows in Lock Chamber
 Mooring Model for Barge Tows in Lock Chamber by Richard L. Stockstill BACKGROUND: Extensive research has been conducted in the area of modeling mooring systems in sea environments where the forcing function
Mooring Model for Barge Tows in Lock Chamber by Richard L. Stockstill BACKGROUND: Extensive research has been conducted in the area of modeling mooring systems in sea environments where the forcing function
Optimal Design of FPSO Vessels
 November 2, 201 Optimal Design of FPSO Vessels Ezebuchi Akandu PhD, MTech, BTech, COREN, RINA, MNSE Department of Marine Engineering, Rivers State University, Port Harcourt, Nigeria akandu.ezebuchi@ust.edu.ng
November 2, 201 Optimal Design of FPSO Vessels Ezebuchi Akandu PhD, MTech, BTech, COREN, RINA, MNSE Department of Marine Engineering, Rivers State University, Port Harcourt, Nigeria akandu.ezebuchi@ust.edu.ng
Estimating Maneuvering and Seakeeping Characteristics with Neural Networks
 070131-071 1 Estimating Maneuvering and Seakeeping Characteristics with Neural Networks Paulo Triunfante Martins 1, Victor Lobo 2, Member, IEEE Maneuvering and seakeeping are two very important naval architecture
070131-071 1 Estimating Maneuvering and Seakeeping Characteristics with Neural Networks Paulo Triunfante Martins 1, Victor Lobo 2, Member, IEEE Maneuvering and seakeeping are two very important naval architecture
Department of Aerospace and Ocean Engineering Graduate Study Specialization in Ocean Engineering. Written Preliminary Examination Information
 Department of Aerospace and Ocean Engineering Graduate Study Specialization in Ocean Engineering Written Preliminary Examination Information Faculty: Professors W. Neu, O. Hughes, A. Brown, M. Allen Test
Department of Aerospace and Ocean Engineering Graduate Study Specialization in Ocean Engineering Written Preliminary Examination Information Faculty: Professors W. Neu, O. Hughes, A. Brown, M. Allen Test
A Boundary Element Method Applied to Strongly Nonlinear Wave-Body Interaction Problems
 Hui Sun A Boundary Element Method Applied to Strongly Nonlinear Wave-Body Interaction Problems Thesis for the degree of philosophiae doctor Trondheim, May 7 Norwegian University of Science and Technology
Hui Sun A Boundary Element Method Applied to Strongly Nonlinear Wave-Body Interaction Problems Thesis for the degree of philosophiae doctor Trondheim, May 7 Norwegian University of Science and Technology
SEAKEEPING AND MANEUVERING Prof. Dr. S. Beji 2
 SEAKEEPING AND MANEUVERING Prof. Dr. S. Beji 2 Ship Motions Ship motions in a seaway are very complicated but can be broken down into 6-degrees of freedom motions relative to 3 mutually perpendicular axes
SEAKEEPING AND MANEUVERING Prof. Dr. S. Beji 2 Ship Motions Ship motions in a seaway are very complicated but can be broken down into 6-degrees of freedom motions relative to 3 mutually perpendicular axes
DYNAMIC CHARACTERISTICS OF OFFSHORE TENSION LEG PLATFORMS UNDER HYDRODYNAMIC FORCES
 International Journal of Civil Engineering (IJCE) ISSN(P): 2278-9987; ISSN(E): 2278-9995 Vol. 3, Issue 1, Jan 214, 7-16 IASET DYNAMIC CHARACTERISTICS OF OFFSHORE TENSION LEG PLATFORMS UNDER HYDRODYNAMIC
International Journal of Civil Engineering (IJCE) ISSN(P): 2278-9987; ISSN(E): 2278-9995 Vol. 3, Issue 1, Jan 214, 7-16 IASET DYNAMIC CHARACTERISTICS OF OFFSHORE TENSION LEG PLATFORMS UNDER HYDRODYNAMIC
Requirements for Computational Methods to be sed for the IMO Second Generation Intact Stability Criteria
 Proceedings of the 1 th International Conference on the Stability of Ships and Ocean Vehicles, 14-19 June 15, Glasgow, UK Requirements for Computational Methods to be sed for the IMO Second Generation
Proceedings of the 1 th International Conference on the Stability of Ships and Ocean Vehicles, 14-19 June 15, Glasgow, UK Requirements for Computational Methods to be sed for the IMO Second Generation
Aeroelastic Gust Response
 Aeroelastic Gust Response Civil Transport Aircraft - xxx Presented By: Fausto Gill Di Vincenzo 04-06-2012 What is Aeroelasticity? Aeroelasticity studies the effect of aerodynamic loads on flexible structures,
Aeroelastic Gust Response Civil Transport Aircraft - xxx Presented By: Fausto Gill Di Vincenzo 04-06-2012 What is Aeroelasticity? Aeroelasticity studies the effect of aerodynamic loads on flexible structures,
Motions and Resistance of a Ship in Regular Following Waves
 Reprinted: 01-11-2000 Revised: 03-10-2007 Website: www.shipmotions.nl Report 440, September 1976, Delft University of Technology, Ship Hydromechanics Laboratory, Mekelweg 2, 2628 CD Delft, The Netherlands.
Reprinted: 01-11-2000 Revised: 03-10-2007 Website: www.shipmotions.nl Report 440, September 1976, Delft University of Technology, Ship Hydromechanics Laboratory, Mekelweg 2, 2628 CD Delft, The Netherlands.
INVESTIGATION OF SEAKEEPING CHARACTERISTICS OF HIGH-SPEED CATAMARANS IN WAVES
 Journal of Marine Science and Technology, Vol. 12, No. 1, pp. 7-15 (2004) 7 INVESTIGATION OF SEAKEEPING CHARACTERISTICS OF HIGH-SPEED CATAMARANS IN WAVES Chih-Chung Fang* and Hoi-Sang Chan** Key words:
Journal of Marine Science and Technology, Vol. 12, No. 1, pp. 7-15 (2004) 7 INVESTIGATION OF SEAKEEPING CHARACTERISTICS OF HIGH-SPEED CATAMARANS IN WAVES Chih-Chung Fang* and Hoi-Sang Chan** Key words:
A simplified method for calculating propeller thrust decrease for a ship sailing on a given shipping lane
 POLISH MARITIME RESEARCH 2(82) 2014 Vol 21; pp. 27-33 10.2478/pomr-2014-0015 A simplified method for calculating propeller thrust decrease for a ship sailing on a given shipping lane Katarzyna Zelazny,
POLISH MARITIME RESEARCH 2(82) 2014 Vol 21; pp. 27-33 10.2478/pomr-2014-0015 A simplified method for calculating propeller thrust decrease for a ship sailing on a given shipping lane Katarzyna Zelazny,
Design and modelling of an airship station holding controller for low cost satellite operations
 AIAA Guidance, Navigation, and Control Conference and Exhibit 15-18 August 25, San Francisco, California AIAA 25-62 Design and modelling of an airship station holding controller for low cost satellite
AIAA Guidance, Navigation, and Control Conference and Exhibit 15-18 August 25, San Francisco, California AIAA 25-62 Design and modelling of an airship station holding controller for low cost satellite
THE LINEAR NUMERICAL ANALYSIS OF DISPLACEMENT RESPONSE AMPLITUDE OPERATOR, BASED ON THE HYDROELASTICITY THEORY, FOR A BARGE TEST SHIP
 APPIED PHYSICS MECHANICS THE INEAR NUMERICA ANAYSIS OF DISPACEMENT RESPONSE AMPITUDE OPERATOR, BASED ON THE HYDROEASTICITY THEORY, FOR A BARGE TEST SHIP EONARD DOMNIªORU 1, IVIU STOICESCU 1, DANIEA DOMNIªORU
APPIED PHYSICS MECHANICS THE INEAR NUMERICA ANAYSIS OF DISPACEMENT RESPONSE AMPITUDE OPERATOR, BASED ON THE HYDROEASTICITY THEORY, FOR A BARGE TEST SHIP EONARD DOMNIªORU 1, IVIU STOICESCU 1, DANIEA DOMNIªORU
A Discussion About Seakeeping and Manoeuvring Models For Surface Vessels
 A Discussion About Seakeeping and Manoeuvring Models For Surface Vessels Tristan Perez, Thor I. Fossen and Asgeir Sørensen Technical Report (MSS-TR-001) Marine System Simulator (MSS) Group (http://www.cesos.ntnu.no/mss/)
A Discussion About Seakeeping and Manoeuvring Models For Surface Vessels Tristan Perez, Thor I. Fossen and Asgeir Sørensen Technical Report (MSS-TR-001) Marine System Simulator (MSS) Group (http://www.cesos.ntnu.no/mss/)
WAMIT-MOSES Hydrodynamic Analysis Comparison Study. JRME, July 2000
 - Hydrodynamic Analysis Comparison Study - Hydrodynamic Analysis Comparison Study JRME, Prepared by Hull Engineering Department J. Ray McDermott Engineering, LLC 1 - Hydrodynamic Analysis Comparison Study
- Hydrodynamic Analysis Comparison Study - Hydrodynamic Analysis Comparison Study JRME, Prepared by Hull Engineering Department J. Ray McDermott Engineering, LLC 1 - Hydrodynamic Analysis Comparison Study
Hull loads and response, hydroelasticity
 Transactions on the Built Environment vol 1, 1993 WIT Press, www.witpress.com, ISSN 1743-3509 Hull loads and response, hydroelasticity effects on fast monohulls E. Jullumstr0 & J.V. Aarsnes Division of
Transactions on the Built Environment vol 1, 1993 WIT Press, www.witpress.com, ISSN 1743-3509 Hull loads and response, hydroelasticity effects on fast monohulls E. Jullumstr0 & J.V. Aarsnes Division of
Numerical Analysis of Unsteady Open Water Characteristics of Surface Piercing Propeller
 Third International Symposium on Marine Propulsors smp 13, Launceston, Tasmania, Australia, May 2013 Numerical Analysis of Unsteady Open Water Characteristics of Surface Piercing Propeller Kohei Himei
Third International Symposium on Marine Propulsors smp 13, Launceston, Tasmania, Australia, May 2013 Numerical Analysis of Unsteady Open Water Characteristics of Surface Piercing Propeller Kohei Himei
Seakeeping characteristics of intact and damaged ship in the Adriatic Sea
 Towards Green Marine Technology and Transport Guedes Soares, Dejhalla & Pavleti (Eds) 2015 Taylor & Francis Group, London, ISBN 978-1-138-02887-6 Seakeeping characteristics of intact and damaged ship in
Towards Green Marine Technology and Transport Guedes Soares, Dejhalla & Pavleti (Eds) 2015 Taylor & Francis Group, London, ISBN 978-1-138-02887-6 Seakeeping characteristics of intact and damaged ship in
Measurement of speed loss due to waves
 Third International Symposium on Marine Propulsors smp 13, Launceston, Tasmania, Australia, May 213 Measurement of speed loss due to waves Sverre Steen 1 and Zhenju Chuang 1 1 Department of Marine Technology,
Third International Symposium on Marine Propulsors smp 13, Launceston, Tasmania, Australia, May 213 Measurement of speed loss due to waves Sverre Steen 1 and Zhenju Chuang 1 1 Department of Marine Technology,
CFD Based Hull Hydrodynamic Forces for Simulation of Ship Manoeuvres
 International Journal on Marine avigation and Safety of Sea Transportation Volume 3 umber 1 March 9 Based Hull Hydrodynamic Forces for Simulation of Ship Manoeuvres T. Tabaczek, T. Gornicz & J. Kulczyk
International Journal on Marine avigation and Safety of Sea Transportation Volume 3 umber 1 March 9 Based Hull Hydrodynamic Forces for Simulation of Ship Manoeuvres T. Tabaczek, T. Gornicz & J. Kulczyk
Review on Vortex-Induced Vibration for Wave Propagation Class
 Review on Vortex-Induced Vibration for Wave Propagation Class By Zhibiao Rao What s Vortex-Induced Vibration? In fluid dynamics, vortex-induced vibrations (VIV) are motions induced on bodies interacting
Review on Vortex-Induced Vibration for Wave Propagation Class By Zhibiao Rao What s Vortex-Induced Vibration? In fluid dynamics, vortex-induced vibrations (VIV) are motions induced on bodies interacting
ID-1307 DYNAMIC RESPONSE OF MARINE COMPOSITES TO SLAMMING LOADS
 ID-1307 DYNAMIC RESPONSE OF MARINE COMPOSITES TO SLAMMING LOADS Mark Battley and Dan Svensson Engineering Dynamics Department, Industrial Research Limited PO Box 2225, Auckland, New Zealand SUMMARY: Marine
ID-1307 DYNAMIC RESPONSE OF MARINE COMPOSITES TO SLAMMING LOADS Mark Battley and Dan Svensson Engineering Dynamics Department, Industrial Research Limited PO Box 2225, Auckland, New Zealand SUMMARY: Marine
INFLUENCE OF TETHER LENGTH IN THE RESPONSE BEHAVIOR OF SQUARE TENSION LEG PLATFORM IN REGULAR WAVES
 INFLUENCE OF TETHER LENGTH IN THE RESPONSE BEHAVIOR OF SQUARE TENSION LEG PLATFOR IN REGULAR WAVES 1 Amr R. El-gamal, 2 Ashraf Essa, 1 Faculty of Engineering, Benha Univ., Egypt, 2 Associated prof., National
INFLUENCE OF TETHER LENGTH IN THE RESPONSE BEHAVIOR OF SQUARE TENSION LEG PLATFOR IN REGULAR WAVES 1 Amr R. El-gamal, 2 Ashraf Essa, 1 Faculty of Engineering, Benha Univ., Egypt, 2 Associated prof., National
CFD modeling of 2D asymmetric entry impact along with horizontal velocity
 CFD modeling of D asymmetric entry impact along with horizontal velocity Modelado del impacto en dos dimensiones de secciones típicas de botes de planeo con entrada asimétrica y velocidad horizontal Roberto
CFD modeling of D asymmetric entry impact along with horizontal velocity Modelado del impacto en dos dimensiones de secciones típicas de botes de planeo con entrada asimétrica y velocidad horizontal Roberto
Design, Construction & Operation of LNG/LPG Ships, November, Glasgow, UK
 Design, Construction & Operation of LNG/LPG Ships, 29-3 November, Glasgow, UK SLOSHING AND SWIRLING IN MEMBRANE LNG TANKS AND THEIR COUPLING EFFECTS WITH SHIP MOTION M Arai and G M Karuka, Yokohama National
Design, Construction & Operation of LNG/LPG Ships, 29-3 November, Glasgow, UK SLOSHING AND SWIRLING IN MEMBRANE LNG TANKS AND THEIR COUPLING EFFECTS WITH SHIP MOTION M Arai and G M Karuka, Yokohama National
&7+/)18/ Roberto Algarín 1 Antonio Bula 2 Oscar Tascón 3
18/ Roberto Algarín 1 Antonio Bula 2 Oscar Tascón 3") &7+/)/ Roberto Algarín Antonio Bula Oscar Tascón The D impact phenomenon in calm water, considering symmetric entry with vertical velocity is studied. The analysis was performed by using commercial STAR-CCM+
&7+/)/ Roberto Algarín Antonio Bula Oscar Tascón The D impact phenomenon in calm water, considering symmetric entry with vertical velocity is studied. The analysis was performed by using commercial STAR-CCM+
RESPONSE ANALYSIS OF SHIP STRUCTURES SUBJECTED TO A CLUSTER OF IMPULSIVE EXCITATIONS. Elena Ciappi 1, Daniele Dessi 1
 ICSV14 Cairns Australia 9-12 July, 2007 RESPONSE ANALYSIS OF SHIP STRUCTURES SUBJECTED TO A CLUSTER OF IMPULSIVE EXCITATIONS Abstract Elena Ciappi 1, Daniele Dessi 1 1 INSEAN-Istituto Nazionale per Studi
ICSV14 Cairns Australia 9-12 July, 2007 RESPONSE ANALYSIS OF SHIP STRUCTURES SUBJECTED TO A CLUSTER OF IMPULSIVE EXCITATIONS Abstract Elena Ciappi 1, Daniele Dessi 1 1 INSEAN-Istituto Nazionale per Studi
Student name: This is a closed book examination. You are allowed 1 sheet of 8.5 x 11 paper with notes.
 13.012 Marine Hydrodynamics for Ocean Engineers Fall 2004 Quiz #2 Student name: This is a closed book examination. You are allowed 1 sheet of 8.5 x 11 paper with notes. For the problems in Section A, fill
13.012 Marine Hydrodynamics for Ocean Engineers Fall 2004 Quiz #2 Student name: This is a closed book examination. You are allowed 1 sheet of 8.5 x 11 paper with notes. For the problems in Section A, fill
Effect of Tethers Tension Force in the Behavior of a Tension Leg Platform Subjected to Hydrodynamic Force Amr R. El-Gamal, Ashraf Essa, Ayman Ismail
 Vol:7, No:1, 13 Effect of Tethers Tension Force in the Behavior of a Tension Leg Platform Subjected to Hydrodynamic Force Amr R. El-Gamal, Ashraf Essa, Ayman Ismail International Science Index, Bioengineering
Vol:7, No:1, 13 Effect of Tethers Tension Force in the Behavior of a Tension Leg Platform Subjected to Hydrodynamic Force Amr R. El-Gamal, Ashraf Essa, Ayman Ismail International Science Index, Bioengineering
Proceedings of the ASME th International Conference on Ocean, Offshore and Arctic Engineering OMAE2013 June 9-14, 2013, Nantes, France
 Proceedings of the ASME 2011 32th International Conference on Ocean, Offshore and Arctic Engineering OMAE2013 June 9-14, 2013, Nantes, France OMAE2013-10124 APPLYING STRIP THEORY BASED LINEAR SEAKEEPING
Proceedings of the ASME 2011 32th International Conference on Ocean, Offshore and Arctic Engineering OMAE2013 June 9-14, 2013, Nantes, France OMAE2013-10124 APPLYING STRIP THEORY BASED LINEAR SEAKEEPING
Methodology for sloshing induced slamming loads and response. Olav Rognebakke Det Norske Veritas AS
 Methodology for sloshing induced slamming loads and response Olav Rognebakke Det Norske Veritas AS Post doc. CeSOS 2005-2006 1 Presentation overview Physics of sloshing and motivation Sloshing in rectangular
Methodology for sloshing induced slamming loads and response Olav Rognebakke Det Norske Veritas AS Post doc. CeSOS 2005-2006 1 Presentation overview Physics of sloshing and motivation Sloshing in rectangular
OTG-13. Prediction of air gap for column stabilised units. Won Ho Lee 01 February Ungraded. 01 February 2017 SAFER, SMARTER, GREENER
 OTG-13 Prediction of air gap for column stabilised units Won Ho Lee 1 SAFER, SMARTER, GREENER Contents Air gap design requirements Purpose of OTG-13 OTG-13 vs. OTG-14 Contributions to air gap Linear analysis
OTG-13 Prediction of air gap for column stabilised units Won Ho Lee 1 SAFER, SMARTER, GREENER Contents Air gap design requirements Purpose of OTG-13 OTG-13 vs. OTG-14 Contributions to air gap Linear analysis
developed at "Dunarea de Jos" University of Galati Presented by: BENZOHRA Abdelmalek
 Master Thesis presented in partial fulfillment of the requirements for the double degree: Advanced Master in Naval Architecture conferred by University of Liege "Master of Sciences in Applied Mechanics,
Master Thesis presented in partial fulfillment of the requirements for the double degree: Advanced Master in Naval Architecture conferred by University of Liege "Master of Sciences in Applied Mechanics,
Professor T.S. Jang. Naval Architecture and Ocean Engineering Naval Architecture and Ocean Engineering
 Professor T.S. Jang E-mail: taek@pusan.ac.kr Homepage: http://home.pusan.ac.kr/~wave Laboratory: Ocean Engineering Laboratory (http://jang.pusan.ac.kr/) Affiliation: Naval Architecture and Ocean Engineering,
Professor T.S. Jang E-mail: taek@pusan.ac.kr Homepage: http://home.pusan.ac.kr/~wave Laboratory: Ocean Engineering Laboratory (http://jang.pusan.ac.kr/) Affiliation: Naval Architecture and Ocean Engineering,
TTK4190 Guidance and Control Exam Suggested Solution Spring 2011
 TTK4190 Guidance and Control Exam Suggested Solution Spring 011 Problem 1 A) The weight and buoyancy of the vehicle can be found as follows: W = mg = 15 9.81 = 16.3 N (1) B = 106 4 ( ) 0.6 3 3 π 9.81 =
TTK4190 Guidance and Control Exam Suggested Solution Spring 011 Problem 1 A) The weight and buoyancy of the vehicle can be found as follows: W = mg = 15 9.81 = 16.3 N (1) B = 106 4 ( ) 0.6 3 3 π 9.81 =
Aero-Propulsive-Elastic Modeling Using OpenVSP
 Aero-Propulsive-Elastic Modeling Using OpenVSP August 8, 213 Kevin W. Reynolds Intelligent Systems Division, Code TI NASA Ames Research Center Our Introduction To OpenVSP Overview! Motivation and Background!
Aero-Propulsive-Elastic Modeling Using OpenVSP August 8, 213 Kevin W. Reynolds Intelligent Systems Division, Code TI NASA Ames Research Center Our Introduction To OpenVSP Overview! Motivation and Background!
Simple Estimation of Wave Added Resistance from Experiments in Transient and Irregular Water Waves
 Simple Estimation of Wave Added Resistance from Experiments in Transient and Irregular Water Waves by Tsugukiyo Hirayama*, Member Xuefeng Wang*, Member Summary Experiments in transient water waves are
Simple Estimation of Wave Added Resistance from Experiments in Transient and Irregular Water Waves by Tsugukiyo Hirayama*, Member Xuefeng Wang*, Member Summary Experiments in transient water waves are
Aalto University School of Engineering
 Aalto University School of Engineering Kul-24.4120 Ship Structural Design (P) Lecture 8 - Local and Global Vibratory Response Kul-24.4120 Ship Structures Response Lecture 5: Tertiary Response: Bending
Aalto University School of Engineering Kul-24.4120 Ship Structural Design (P) Lecture 8 - Local and Global Vibratory Response Kul-24.4120 Ship Structures Response Lecture 5: Tertiary Response: Bending
One Good Turn. For vehicle navigation and tracking this simulation accounts for the dynamics of the dynamic control loop. DR.
 One Good Turn Azarsina, Bose and Seif describe a numerical simulation of an underwater vehicle maneuvering under the action of its dynamic control systems in deep calm water. Who should read this paper?
One Good Turn Azarsina, Bose and Seif describe a numerical simulation of an underwater vehicle maneuvering under the action of its dynamic control systems in deep calm water. Who should read this paper?
Model Reference Adaptive Control of Underwater Robotic Vehicle in Plane Motion
 Proceedings of the 11th WSEAS International Conference on SSTEMS Agios ikolaos Crete Island Greece July 23-25 27 38 Model Reference Adaptive Control of Underwater Robotic Vehicle in Plane Motion j.garus@amw.gdynia.pl
Proceedings of the 11th WSEAS International Conference on SSTEMS Agios ikolaos Crete Island Greece July 23-25 27 38 Model Reference Adaptive Control of Underwater Robotic Vehicle in Plane Motion j.garus@amw.gdynia.pl
Experimental studies of springing and whipping of container vessels
 Experimental studies of springing and whipping of container vessels Ole Andreas Hermundstad CeSOS Highlights and AMOS Visions Conference 27-29th May 2013 in Trondheim Outline Background and motivation
Experimental studies of springing and whipping of container vessels Ole Andreas Hermundstad CeSOS Highlights and AMOS Visions Conference 27-29th May 2013 in Trondheim Outline Background and motivation
PARAMETRIC EXCITATION OF A DWSC. A Thesis CHANDAN LAKHOTIA
 PARAMETRIC EXCITATION OF A DWSC A Thesis by CHANDAN LAKHOTIA Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE
PARAMETRIC EXCITATION OF A DWSC A Thesis by CHANDAN LAKHOTIA Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE
IJEScA. Motions Analysis of a Phinisi Ship Hull with New Strip Method. F. Mahmuddin 1, A. Fitriadhy 2 and S. Dewa 1 ABSTRACT 1.
 Motions Analysis of a Phinisi Ship Hull with New Strip Method ABSTRACT F. Mahmuddin 1, A. Fitriadhy 2 and S. Dewa 1 1 Naval Architecture Department, Engineering Faculty, Hasanuddin University, Indonesia
Motions Analysis of a Phinisi Ship Hull with New Strip Method ABSTRACT F. Mahmuddin 1, A. Fitriadhy 2 and S. Dewa 1 1 Naval Architecture Department, Engineering Faculty, Hasanuddin University, Indonesia
DYNAMIC POSITIONING CONFERENCE. October 13-14, Thrusters. Voith Schneider Propeller - An Efficient Propulsion System for DP Controlled Vessels
 Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 2009 Thrusters Voith Schneider Propeller - An Efficient Propulsion System for DP Controlled Vessels Dirk Jürgens, Michael Palm
Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 2009 Thrusters Voith Schneider Propeller - An Efficient Propulsion System for DP Controlled Vessels Dirk Jürgens, Michael Palm
SPECIAL CONDITION. Water Load Conditions. SPECIAL CONDITION Water Load Conditions
 Doc. No. : SC-CVLA.051-01 Issue : 1d Date : 04-Aug-009 Page : 1 of 13 SUBJECT : CERTIFICATION SPECIFICATION : VLA.51 PRIMARY GROUP / PANEL : 03 (Structure) SECONDARY GROUPE / PANEL : -- NATURE : SCN VLA.51
Doc. No. : SC-CVLA.051-01 Issue : 1d Date : 04-Aug-009 Page : 1 of 13 SUBJECT : CERTIFICATION SPECIFICATION : VLA.51 PRIMARY GROUP / PANEL : 03 (Structure) SECONDARY GROUPE / PANEL : -- NATURE : SCN VLA.51
Dessi, D., D Orazio, D.
 CORRELATION OF MODEL-SCALE AND FULL-SCALE DATA: SENSOR VALIDATION AND ELASTIC SCALING EVALUATION Dessi, D., D Orazio, D. INSEAN-CNR Rome - Italy 1 Project structure hydroelastic side This work was funded
CORRELATION OF MODEL-SCALE AND FULL-SCALE DATA: SENSOR VALIDATION AND ELASTIC SCALING EVALUATION Dessi, D., D Orazio, D. INSEAN-CNR Rome - Italy 1 Project structure hydroelastic side This work was funded
SIMPLIFICATION BY MATHEMATIC MODEL TO SOLVE THE EXPERIMENTAL OF SLOSHING EFFECT ON THE FPSO VESSEL
 European International Journal of Science and Technology Vol. 3 No. 5 June, 2014 SIMPLIFICATION BY MATHEMATIC MODEL TO SOLVE THE EXPERIMENTAL OF SLOSHING EFFECT ON THE FPSO VESSEL LuhutTumpalParulianSinaga
European International Journal of Science and Technology Vol. 3 No. 5 June, 2014 SIMPLIFICATION BY MATHEMATIC MODEL TO SOLVE THE EXPERIMENTAL OF SLOSHING EFFECT ON THE FPSO VESSEL LuhutTumpalParulianSinaga
/ m U) β - r dr/dt=(n β / C) β+ (N r /C) r [8+8] (c) Effective angle of attack. [4+6+6]
![/ m U) β - r dr/dt=(n β / C) β+ (N r /C) r [8+8] (c) Effective angle of attack. [4+6+6]](/thumbs/91/105418625.jpg "/ m U) β - r dr/dt=(n β / C) β+ (N r /C) r [8+8] (c) Effective angle of attack. [4+6+6]") Code No: R05322101 Set No. 1 1. (a) Explain the following terms with examples i. Stability ii. Equilibrium. (b) Comment upon the requirements of stability of a i. Military fighter aircraft ii. Commercial
Code No: R05322101 Set No. 1 1. (a) Explain the following terms with examples i. Stability ii. Equilibrium. (b) Comment upon the requirements of stability of a i. Military fighter aircraft ii. Commercial
A Probabilistic Design Approach for Riser Collision based on Time- Domain Response Analysis
 A Probabilistic Design Approach for Riser Collision based on Time- Domain Response Analysis B.J. Leira NTNU, Dept. Marine Structures,Trondheim, Norway T. Holmås MARINTEK, Div. of Structural Engineering,,
A Probabilistic Design Approach for Riser Collision based on Time- Domain Response Analysis B.J. Leira NTNU, Dept. Marine Structures,Trondheim, Norway T. Holmås MARINTEK, Div. of Structural Engineering,,
Numerical Study of the Roll Decay of Intact and Damaged Ships by Q. Gao and D. Vassalos
 Session 7 Stability of Damaged Ships Numerical Simulation of Progressive Flooding and Capsize Numerical Study of the Roll Decay of Intact and Damaged Ships by Q. Gao and D. Vassalos Qiuxin Gao and Dracos
Session 7 Stability of Damaged Ships Numerical Simulation of Progressive Flooding and Capsize Numerical Study of the Roll Decay of Intact and Damaged Ships by Q. Gao and D. Vassalos Qiuxin Gao and Dracos
13.42 LECTURE 13: FLUID FORCES ON BODIES. Using a two dimensional cylinder within a two-dimensional flow we can demonstrate some of the principles
 13.42 LECTURE 13: FLUID FORCES ON BODIES SPRING 2003 c A. H. TECHET & M.S. TRIANTAFYLLOU 1. Morrison s Equation Using a two dimensional cylinder within a two-dimensional flow we can demonstrate some of
13.42 LECTURE 13: FLUID FORCES ON BODIES SPRING 2003 c A. H. TECHET & M.S. TRIANTAFYLLOU 1. Morrison s Equation Using a two dimensional cylinder within a two-dimensional flow we can demonstrate some of
Prediction of Propeller Performance Using Quasi-Continuous Method
 Prediction of Propeller Performance Using Quasi-Continuous Method Hao Rui, a,* and Jaswar Koto, b a) Aeronautics, Automotive and Ocean Engineering, Universiti Teknologi Malaysia, Malaysia b) Ocean and
Prediction of Propeller Performance Using Quasi-Continuous Method Hao Rui, a,* and Jaswar Koto, b a) Aeronautics, Automotive and Ocean Engineering, Universiti Teknologi Malaysia, Malaysia b) Ocean and
Breu, Frequency Detuning of Parametric Roll
 Frequency Detuning of Parametric Roll Conference on CeSOS Highlights and AMOS Visions, May 29, 2013 Dominik Breu Department of Engineering Cybernetics, NTNU, Trondheim, Norway Centre for Ships and Ocean
Frequency Detuning of Parametric Roll Conference on CeSOS Highlights and AMOS Visions, May 29, 2013 Dominik Breu Department of Engineering Cybernetics, NTNU, Trondheim, Norway Centre for Ships and Ocean
Overview of BV R&D activities in Marine Hydrodynamics
 Overview of BV R&D activities in Marine Hydrodynamics Special attention to hydro-structure interactions Šime Malenica Bureau Veritas Marine & Offshore Division Research Department Harbin, 29th of June
Overview of BV R&D activities in Marine Hydrodynamics Special attention to hydro-structure interactions Šime Malenica Bureau Veritas Marine & Offshore Division Research Department Harbin, 29th of June
Offshore Hydromechanics Module 1
 Offshore Hydromechanics Module 1 Dr. ir. Pepijn de Jong 6. Real Flows part 2 Introduction Topics of Module 1 Problems of interest Chapter 1 Hydrostatics Chapter 2 Floating stability Chapter 2 Constant
Offshore Hydromechanics Module 1 Dr. ir. Pepijn de Jong 6. Real Flows part 2 Introduction Topics of Module 1 Problems of interest Chapter 1 Hydrostatics Chapter 2 Floating stability Chapter 2 Constant
Structural Dynamics. Spring mass system. The spring force is given by and F(t) is the driving force. Start by applying Newton s second law (F=ma).
 is the driving force. Start by applying Newton s second law (F=ma).") Structural Dynamics Spring mass system. The spring force is given by and F(t) is the driving force. Start by applying Newton s second law (F=ma). We will now look at free vibrations. Considering the free
Structural Dynamics Spring mass system. The spring force is given by and F(t) is the driving force. Start by applying Newton s second law (F=ma). We will now look at free vibrations. Considering the free
- Marine Hydrodynamics. Lecture 14. F, M = [linear function of m ij ] [function of instantaneous U, U, Ω] not of motion history.
![- Marine Hydrodynamics. Lecture 14. F, M = [linear function of m ij ] [function of instantaneous U, U, Ω] not of motion history.](/thumbs/79/78889363.jpg "- Marine Hydrodynamics. Lecture 14. F, M = [linear function of m ij ] [function of instantaneous U, U, Ω] not of motion history.") 2.20 - Marine Hydrodynamics, Spring 2005 ecture 14 2.20 - Marine Hydrodynamics ecture 14 3.20 Some Properties of Added-Mass Coefficients 1. m ij = ρ [function of geometry only] F, M = [linear function
2.20 - Marine Hydrodynamics, Spring 2005 ecture 14 2.20 - Marine Hydrodynamics ecture 14 3.20 Some Properties of Added-Mass Coefficients 1. m ij = ρ [function of geometry only] F, M = [linear function
Exam - TTK 4190 Guidance & Control Eksamen - TTK 4190 Fartøysstyring
 Page 1 of 6 Norges teknisk- naturvitenskapelige universitet Institutt for teknisk kybernetikk Faglig kontakt / contact person: Navn: Morten Pedersen, Universitetslektor Tlf.: 41602135 Exam - TTK 4190 Guidance
Page 1 of 6 Norges teknisk- naturvitenskapelige universitet Institutt for teknisk kybernetikk Faglig kontakt / contact person: Navn: Morten Pedersen, Universitetslektor Tlf.: 41602135 Exam - TTK 4190 Guidance
Proceedings of OMAE'02 21 st International Conference on Offshore Mechanics and Arctic Engineering June 23-27, 2002, Oslo, Norway
 Proceedings of OMAE'02 21 st International Conference on Offshore Mechanics and Arctic Engineering June 23-27, 2002, Oslo, Norway OMAE 2002-28435 ESTIMATION OF EXTREME RESPONSE AND FATIGUE DAMAGE FOR COLLIDING
Proceedings of OMAE'02 21 st International Conference on Offshore Mechanics and Arctic Engineering June 23-27, 2002, Oslo, Norway OMAE 2002-28435 ESTIMATION OF EXTREME RESPONSE AND FATIGUE DAMAGE FOR COLLIDING
Effects of hull form parameters on seakeeping for YTU gulet series with cruiser stern
 csnk, 04 Int. J. Nav. rchit. Ocean Eng. (04) 6:700~74 http://dx.doi.org/0.478/ijnoe-03-006 pissn: 09-678, eissn: 09-6790 Effects of hull form parameters on seakeeping for YTU gulet series with cruiser
csnk, 04 Int. J. Nav. rchit. Ocean Eng. (04) 6:700~74 http://dx.doi.org/0.478/ijnoe-03-006 pissn: 09-678, eissn: 09-6790 Effects of hull form parameters on seakeeping for YTU gulet series with cruiser
Chapter IV. (Ship Hydro-Statics & Dynamics) Floatation & Stability
 Floatation & Stability") Chapter V (Ship Hydro-Statics & Dynamics) Floatation & Stability 4.1 mportant Hydro-Static Curves or Relations (see Fig. 4.11 at p44 & handout) Displacement Curves (displacement [molded, total] vs. draft,
Chapter V (Ship Hydro-Statics & Dynamics) Floatation & Stability 4.1 mportant Hydro-Static Curves or Relations (see Fig. 4.11 at p44 & handout) Displacement Curves (displacement [molded, total] vs. draft,
FLOW SEPARATION. Aerodynamics Bridge-Pier Design Combustion Chambers Human Blood Flow Building Design Etc.
 FLOW SEPARATION Aerodynamics Bridge-Pier Design Combustion Chambers Human Blood Flow Building Design Etc. (Form Drag, Pressure Distribution, Forces and Moments, Heat And Mass Transfer, Vortex Shedding)
FLOW SEPARATION Aerodynamics Bridge-Pier Design Combustion Chambers Human Blood Flow Building Design Etc. (Form Drag, Pressure Distribution, Forces and Moments, Heat And Mass Transfer, Vortex Shedding)
Hydrodynamic Forces on Floating Bodies
 Hydrodynamic Forces on Floating Bodies 13.42 Lecture Notes; c A.H. Techet 1. Forces on Large Structures For discussion in this section we will be considering bodies that are quite large compared to the
Hydrodynamic Forces on Floating Bodies 13.42 Lecture Notes; c A.H. Techet 1. Forces on Large Structures For discussion in this section we will be considering bodies that are quite large compared to the
Evaluation of Hydrodynamic Performance of a Damaged Ship in Waves
 Evaluation of Hydrodynamic Performance of a Damaged Ship in Waves Sa Young Hong, Seok-Kyu Cho, Byoung Wan Kim, Gyeong Jung Lee, Ki-Sup Kim Maritime and Ocean Engineering Research Institute/KORDI, Daejeon,
Evaluation of Hydrodynamic Performance of a Damaged Ship in Waves Sa Young Hong, Seok-Kyu Cho, Byoung Wan Kim, Gyeong Jung Lee, Ki-Sup Kim Maritime and Ocean Engineering Research Institute/KORDI, Daejeon,
SLAMMING LOADS AND STRENGTH ASSESSMENT FOR VESSELS
 Guide for Slamming Loads and Strength Assessment for Vessels GUIDE FOR SLAMMING LOADS AND STRENGTH ASSESSMENT FOR VESSELS MARCH 2011 (Updated February 2016 see next page) American Bureau of Shipping Incorporated
Guide for Slamming Loads and Strength Assessment for Vessels GUIDE FOR SLAMMING LOADS AND STRENGTH ASSESSMENT FOR VESSELS MARCH 2011 (Updated February 2016 see next page) American Bureau of Shipping Incorporated
Experimental and Numerical Analysis of the Roll Decay Motion for a Patrol Boat
 Experimental and Numerical Analysis of the Roll Decay Motion for a Patrol Boat R. Broglia, B. Bouscasse, A. Di Mascio and C. Lugni INSEAN Italian Ship Model Basin Rome, Italy P. Atsavapranee NSWCCD Naval
Experimental and Numerical Analysis of the Roll Decay Motion for a Patrol Boat R. Broglia, B. Bouscasse, A. Di Mascio and C. Lugni INSEAN Italian Ship Model Basin Rome, Italy P. Atsavapranee NSWCCD Naval
Self-Excited Vibration in Hydraulic Ball Check Valve
 Self-Excited Vibration in Hydraulic Ball Check Valve L. Grinis, V. Haslavsky, U. Tzadka Abstract This paper describes an experimental, theoretical model and numerical study of concentrated vortex flow
Self-Excited Vibration in Hydraulic Ball Check Valve L. Grinis, V. Haslavsky, U. Tzadka Abstract This paper describes an experimental, theoretical model and numerical study of concentrated vortex flow
Numerical Predictions of Global and Local Ice Loads on Ships and Comparison with Field Measurements
 1 Numerical Predictions of Global and Local Ice Loads on Ships and Comparison with Field Measurements Biao Su Department of Marine Technology, NTNU January 7 th, 2013 Author CeSOS Centre for Ships and
1 Numerical Predictions of Global and Local Ice Loads on Ships and Comparison with Field Measurements Biao Su Department of Marine Technology, NTNU January 7 th, 2013 Author CeSOS Centre for Ships and
Vibrations Qualifying Exam Study Material
 Vibrations Qualifying Exam Study Material The candidate is expected to have a thorough understanding of engineering vibrations topics. These topics are listed below for clarification. Not all instructors
Vibrations Qualifying Exam Study Material The candidate is expected to have a thorough understanding of engineering vibrations topics. These topics are listed below for clarification. Not all instructors
Study on Motions of a Floating Body under Composite External Loads
 137 Study on Motions of a Floating Body under Composite External Loads by Kunihiro Ikegami*, Member Masami Matsuura*, Member Summary In the field of marine engineering, various types of floating bodies
137 Study on Motions of a Floating Body under Composite External Loads by Kunihiro Ikegami*, Member Masami Matsuura*, Member Summary In the field of marine engineering, various types of floating bodies
OpenFOAM simulations of irregular waves and free surface effects around a monopile offshore wind turbine
 OpenFOAM simulations of irregular waves and free surface effects around a monopile offshore wind turbine Ariel J. Edesess 1 4 th Year PhD Candidate Supervisors: Dr. Denis Kelliher 1, Dr. Gareth Thomas
OpenFOAM simulations of irregular waves and free surface effects around a monopile offshore wind turbine Ariel J. Edesess 1 4 th Year PhD Candidate Supervisors: Dr. Denis Kelliher 1, Dr. Gareth Thomas
Sailing Performance and Maneuverability of a Traditional Ryukyuan Tribute Ship
 sia Navigation Conference 009 ailing Performance and Maneuverability of a Traditional Ryukyuan Tribute hip by Yutaka MUYM (Kanazawa Institute of Technology) Hikaru YGI (Tokai University ) Yutaka TERO (Tokai
sia Navigation Conference 009 ailing Performance and Maneuverability of a Traditional Ryukyuan Tribute hip by Yutaka MUYM (Kanazawa Institute of Technology) Hikaru YGI (Tokai University ) Yutaka TERO (Tokai
Nonlinear Time Domain Simulation Technology for Seakeeping and Wave-Load Analysis for Modern Ship Design
 ABS TECHNICAL PAPERS 23 Nonlinear Time Domain Simulation Technology for Seakeeping and Wave-Load Analysis for Modern Ship Design Y.S. Shin, Associate Member, American Bureau of Shipping, V.L. Belenky,
ABS TECHNICAL PAPERS 23 Nonlinear Time Domain Simulation Technology for Seakeeping and Wave-Load Analysis for Modern Ship Design Y.S. Shin, Associate Member, American Bureau of Shipping, V.L. Belenky,
Chapter 1 INTRODUCTION
 Chapter 1 INTRODUCTION 1-1 The Fluid. 1-2 Dimensions. 1-3 Units. 1-4 Fluid Properties. 1 1-1 The Fluid: It is the substance that deforms continuously when subjected to a shear stress. Matter Solid Fluid
Chapter 1 INTRODUCTION 1-1 The Fluid. 1-2 Dimensions. 1-3 Units. 1-4 Fluid Properties. 1 1-1 The Fluid: It is the substance that deforms continuously when subjected to a shear stress. Matter Solid Fluid
Master Thesis. Investigation of inland ship resistance, propulsion and manoeuvring using literature study and potential flow calculations
 Master Thesis Investigation of inland ship resistance, propulsion and manoeuvring using literature study and potential flow calculations Author: Erik Rotteveel Supervisor: Frans Quadvlieg Graduation report
Master Thesis Investigation of inland ship resistance, propulsion and manoeuvring using literature study and potential flow calculations Author: Erik Rotteveel Supervisor: Frans Quadvlieg Graduation report
Hydrodynamic analysis and modelling of ships
 Hydrodynamic analysis and modelling of ships Wave loading Harry B. Bingham Section for Coastal, Maritime & Structural Eng. Department of Mechanical Engineering Technical University of Denmark DANSIS møde
Hydrodynamic analysis and modelling of ships Wave loading Harry B. Bingham Section for Coastal, Maritime & Structural Eng. Department of Mechanical Engineering Technical University of Denmark DANSIS møde
FLUID STRUCTURE INTERACTIONS PREAMBLE. There are two types of vibrations: resonance and instability.
 FLUID STRUCTURE INTERACTIONS PREAMBLE There are two types of vibrations: resonance and instability. Resonance occurs when a structure is excited at a natural frequency. When damping is low, the structure
FLUID STRUCTURE INTERACTIONS PREAMBLE There are two types of vibrations: resonance and instability. Resonance occurs when a structure is excited at a natural frequency. When damping is low, the structure
Some effects of large blade deflections on aeroelastic stability
 47th AIAA Aerospace Sciences Meeting Including The New Horizons Forum and Aerospace Exposition 5-8 January 29, Orlando, Florida AIAA 29-839 Some effects of large blade deflections on aeroelastic stability
47th AIAA Aerospace Sciences Meeting Including The New Horizons Forum and Aerospace Exposition 5-8 January 29, Orlando, Florida AIAA 29-839 Some effects of large blade deflections on aeroelastic stability
NONLINEAR BEHAVIOR OF A SINGLE- POINT MOORING SYSTEM FOR FLOATING OFFSHORE WIND TURBINE
 NONLINEAR BEHAVIOR OF A SINGLE- POINT MOORING SYSTEM FOR FLOATING OFFSHORE WIND TURBINE Ma Chong, Iijima Kazuhiro, Masahiko Fujikubo Dept. of Naval Architecture and Ocean Engineering OSAKA UNIVERSITY RESEARCH
NONLINEAR BEHAVIOR OF A SINGLE- POINT MOORING SYSTEM FOR FLOATING OFFSHORE WIND TURBINE Ma Chong, Iijima Kazuhiro, Masahiko Fujikubo Dept. of Naval Architecture and Ocean Engineering OSAKA UNIVERSITY RESEARCH
DESIGN OPTIMIZATION STUDY ON A CONTAINERSHIP PROPULSION SYSTEM
 DESIGN OPTIMIZATION STUDY ON A CONTAINERSHIP PROPULSION SYSTEM Brian Cuneo Thomas McKenney Morgan Parker ME 555 Final Report April 19, 2010 ABSTRACT This study develops an optimization algorithm to explore
DESIGN OPTIMIZATION STUDY ON A CONTAINERSHIP PROPULSION SYSTEM Brian Cuneo Thomas McKenney Morgan Parker ME 555 Final Report April 19, 2010 ABSTRACT This study develops an optimization algorithm to explore
Experimental and numerical investigation of 2D sloshing: scenarios near the critical filling depth
 Experimental and numerical investigation of 2D sloshing: scenarios near the critical filling depth A. Colagrossi F. Palladino M. Greco a.colagrossi@insean.it f.palladino@insean.it m.greco@insean.it C.
Experimental and numerical investigation of 2D sloshing: scenarios near the critical filling depth A. Colagrossi F. Palladino M. Greco a.colagrossi@insean.it f.palladino@insean.it m.greco@insean.it C.
A NUMERICAL IDENTIFICATION OF EXCITATION FORCE AND NONLINEAR RESTORING CHARACTERISTICS OF SHIP ROLL MOTION
 ournal of Marine Science and Technology Vol. 5 No. 4 pp. 475-481 (017 475 DOI: 10.6119/MST-017-0418-1 A NUMERICAL IDENTIFICATION OF EXCITATION FORCE AND NONNEAR RESTORING CHARACTERISTICS OF SHIP ROLL MOTION
ournal of Marine Science and Technology Vol. 5 No. 4 pp. 475-481 (017 475 DOI: 10.6119/MST-017-0418-1 A NUMERICAL IDENTIFICATION OF EXCITATION FORCE AND NONNEAR RESTORING CHARACTERISTICS OF SHIP ROLL MOTION
A Quadratic, Time-Domain Strip Theory Method for Predicting Global Ship Structure Response in Waves
 University of New Orleans ScholarWorks@UNO Senior Honors Theses Undergraduate Showcase 5-217 A Quadratic, Time-Domain Strip Theory Method for Predicting Global Ship Structure Response in Waves Kyle Elias
University of New Orleans ScholarWorks@UNO Senior Honors Theses Undergraduate Showcase 5-217 A Quadratic, Time-Domain Strip Theory Method for Predicting Global Ship Structure Response in Waves Kyle Elias
DREDGING DYNAMICS AND VIBRATION MEASURES
 DREDGING DYNAMICS AND VIBRATION MEASURES C R Barik, K Vijayan, Department of Ocean Engineering and Naval Architecture, IIT Kharagpur, India ABSTRACT The demands for dredging have found a profound increase
DREDGING DYNAMICS AND VIBRATION MEASURES C R Barik, K Vijayan, Department of Ocean Engineering and Naval Architecture, IIT Kharagpur, India ABSTRACT The demands for dredging have found a profound increase
Numerical Study on Performance of Innovative Wind Turbine Blade for Load Reduction
 Numerical Study on Performance of Innovative Wind Turbine Blade for Load Reduction T. Maggio F. Grasso D.P. Coiro This paper has been presented at the EWEA 011, Brussels, Belgium, 14-17 March 011 ECN-M-11-036
Numerical Study on Performance of Innovative Wind Turbine Blade for Load Reduction T. Maggio F. Grasso D.P. Coiro This paper has been presented at the EWEA 011, Brussels, Belgium, 14-17 March 011 ECN-M-11-036
Problem 1: Ship Path-Following Control System (35%)
") Problem 1: Ship Path-Following Control System (35%) Consider the kinematic equations: Figure 1: NTNU s research vessel, R/V Gunnerus, and Nomoto model: T ṙ + r = Kδ (1) with T = 22.0 s and K = 0.1 s 1.
Problem 1: Ship Path-Following Control System (35%) Consider the kinematic equations: Figure 1: NTNU s research vessel, R/V Gunnerus, and Nomoto model: T ṙ + r = Kδ (1) with T = 22.0 s and K = 0.1 s 1.
Seakeeping of Ships. { ζ + a } 3 ζ 3, ζ = ξ + i η (1)
") Seakeeping of Ships By Professor Masashi KASHIWAGI Problem Set: No. Date: 27 January 2010 Due: 28 February 2010 By using the computer program (iem2d.f) for the boundary-element (Green function) method
Seakeeping of Ships By Professor Masashi KASHIWAGI Problem Set: No. Date: 27 January 2010 Due: 28 February 2010 By using the computer program (iem2d.f) for the boundary-element (Green function) method