Numerical Integration and Numerical Differentiation. Hsiao-Lung Chan Dept Electrical Engineering Chang Gung University, Taiwan
|
|
|
- Merryl Richardson
- 5 years ago
- Views:
Transcription
1 Numerical Integration and Numerical Differentiation Hsiao-Lung Chan Dept Electrical Engineering Chang Gung University, Taiwan
2 Integration 2

3 Mean for discrete and continuous data Discrete data Continuous data 3

4 Numerical integration, also referred to as quadrature The integral may be evaluated over a line, an area, or a volume Determine the net force due to a non-uniform wind blowing against the side of a skyscraper Areal integral: Compute the total rate of energy transfer across a plane where the flux is a function of position Volume integral: the total mass of chemical contained in a reactor is given as the product of the concentration of chemical and the reactor volume. 4

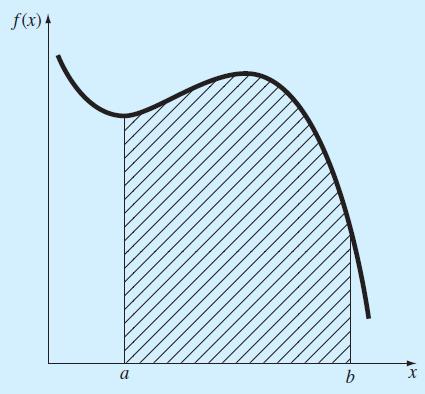
5 Newton-Cotes formulas The strategy of replacing a complicated function or tabulated data with a polynomial that is easy to integrate I b f x dx f n x dx a b a The approximation of an integral by the area under a straight line and a parabola 5
 f b f a x a dx a b a I b a f a f b")
6 Trapezoidal rule The first of the Newton-Cotes closed integration formulas b I f n x dx I a b f (a) f b f a x a dx a b a I b a f a f b 2 6

7 Composite trapezoidal rule x n x 1 x 2 x n I f n x dx f n x dx f n x dx f n x dx x 0 I x 1 x 0 f x 0 f x 1 2 I h n 1 2 f x 0 2 f x i f x n i 1 x 0 x 1 x 2 x 1 f x 1 f x 2 2 x n 1 x n x n 1 f x n 1 f x n 2 7
8 M-file to implement the composite trapezoidal rule function I = trap(func,a,b,n,varargin) % a, b = integration limits, n = number of segments if nargin<3, error('at least 3 input arguments required'), end if ~(b>a), error('upper bound must be greater than lower'), end if nargin<4 isempty(n), n=100; end x = a; h = (b - a)/n; s=func(a,varargin{:}); for i = 1 : n-1 x = x + h; s = s + 2*func(x,varargin{:}); end s = s + func(b,varargin{:}); I = (b - a) * s/(2*n); 8
 sqrt(9.81*68.1/0.25)*tanh(sqrt(9.81*0.25/68.")
9 Example: Determine the distance fallen by the free-falling bungee jumper Falling velocity v t gm c d tanh gc m d t If g = 9.81 m/s2,m = 68.1 kg, cd = 0.25 kg/m, determine falling distance in the first 3 s v=@(t) sqrt(9.81*68.1/0.25)*tanh(sqrt(9.81*0.25/68.1)*t) falldist=trap(v,0,3,5); 9
10 Simpson s rules A more accurate estimate of an integral Apply the trapezoidal rule with finer segmentation Use higher-order polynomials to connect the points Simpson s 1/3 Rule using a 2 nd -order Lagrange polynomial 10

11 Composite Simpson s 1/3 rule 11

12 Simpson s 3/8 rule A third-order Lagrange polynomial is fit to four points and integrated to yield Simpson s 1/3 rule Simpson s 3/8 rule 12
13 Higher-order newton-cotes formulas 13
14 Integration with unequal segments Apply the trapezoidal rule M-file for implementing the trapezoidal rule for unequally spaced data x = [ ]; y = *x-200*x.^2+675*x.^3-900*x.^4+400*x.^5; z= trapuneq(x,y); 14
15 M-file to implement the trapezoidal rule for unequally spaced data function I = trapuneq(x,y) if nargin<2, error('at least 2 input arguments required'),end if any(diff(x)<0), error('x not monotonically ascending'),end n = length(x); if length(y)~=n, error('x and y must be same length'); end s = 0; for k = 1:n-1 s = s + (x(k+l)-x(k))*(y(k)+y(k+l))/2; end I = s; 15
![MATLAB s built-in function for evaluating integrals z = trapz(x, y) x = [0.12.22.32.36.4.44.54.64.7.8]; y = 0.2+25*x-200*x.^2+675*x.^3-900*x.^4+400*x.](/docs-images/90/102183868/images/16-0.jpg "^5; z = trapz(x,y); z = cumtrapz(x, y) Computes the cumulative integral z = a vector whose elements z(k) hold the integral from x(1) to x(k) Cumulative")
16 MATLAB s built-in function for evaluating integrals z = trapz(x, y) x = [ ]; y = *x-200*x.^2+675*x.^3-900*x.^4+400*x.^5; z = trapz(x,y); z = cumtrapz(x, y) Computes the cumulative integral z = a vector whose elements z(k) hold the integral from x(1) to x(k) Cumulative integral 16

17 Multiple integrals Double integral 17
18 MATLAB s built-in function of multiple integral Double (dblquad) and triple (triplequad) integration q = dblquad(fun, xmin, xmax, ymin, ymax, tol); tol: a default tolerance of is used Example: the temperature of a rectangular heated plate is described by the following function q = dblquad(@(x,y) 2*x*y+2*x-x.^2-2*y.^2+72,0,8,0,6); 18

19 Definition of a derivative Difference approximation Derivative x approaches zero 19



20 High-accuracy differentiation formulas Taylor series expansion can be used to generate highaccuracy formulas for derivatives Forward finite-difference Backward finite-difference Centered finite-difference 20
21 High-accuracy differentiation formulas (cont.) Forward Taylor series expansion Substitute into the above equation Improve the accuracy to O(h 2 ). 21
 Forward finite-difference formulas Backward finite-difference formulas")
22 High-accuracy differentiation formulas (cont.) Forward finite-difference formulas Backward finite-difference formulas Centered finite-difference formulas 22
23 MATLAB built-in function of derivative: diff *x-200*x.^2+675*x.^3-900*x.^4+400*x.^5; x=0:0.1:0.8; y=f(x); % generate a series of equally spaced values of variables % numerical estimate of differentiation d=diff(y)./diff(x); d=diff(f(x))/0.1; % because of equally spaced values % analytical estimate of differentiation xa=0:.01:.8; ya=25-400*xa+3*675*xa.^2-4*900*xa.^3+5*400*xa.^4; n=length(x); xm=(x(1:n-1)+x(2:n))./2; plot(xm,d,'o',xa,ya) 23
24 MATLAB built-in function diff (cont.) 24
25 MATLAB built-in function of derivative: gradient *x-200*x.^2+675*x.^3-900*x.^4+400*x.^5; x=0:0.1:0.8; y=f(x); % generate a series of equally spaced values of variables % numerical estimate of differentiation dy=gradient(y,0.1); % because of equally spaced values % analytical estimate of differentiation xa=0:.01:.8; ya=25-400*xa+3*675*xa.^2-4*900*xa.^3+5*400*xa.^4; n=length(x); xm=(x(1:n-1)+x(2:n))./2; plot(xm,d,'o',xa,ya) 25
26 MATLAB built-in function gradient (cont.) centered differences for intermediate values forward and backward differences at the ends 26
27 Partial derivatives Partial first derivatives can be approximated with centered differences 27

28 Example: gradient of mountain elevation z = f (x, y) where z = elevation, x = distance measured along the eastwest axis, y = distance measured along the north-south axis. The gradient of f(x,y) which represents the steepest Slope with a magnitude and direction 28
![Gradient of mountain elevation (cont.) f=@(x,y) y-x-2*x.^2-2.*x.*y-y.^2; [x,y]=meshgrid(-2:.25:0, 1:.25:3); z=f(x,y); [fx,fy]=gradient(z,0.](/docs-images/90/102183868/images/29-0.jpg "25); cs=contour(x,y,z); clabel(cs); hold on % Resultant of partial derivatives is % superimposed as vectors on contour plot quiver(x,y,-fx,-fy);")
29 Gradient of mountain elevation (cont.) y-x-2*x.^2-2.*x.*y-y.^2; [x,y]=meshgrid(-2:.25:0, 1:.25:3); z=f(x,y); [fx,fy]=gradient(z,0.25); cs=contour(x,y,z); clabel(cs); hold on % Resultant of partial derivatives is % superimposed as vectors on contour plot quiver(x,y,-fx,-fy); hold off 29
30 Reference Steven C. Chapra "Applied Numerical Methods with MATLA B", 3rd ed., McGraw Hill,
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 5 Chapter 17 Numerical Integration Formulas PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 5 Chapter 17 Numerical Integration Formulas PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 5 Chapter 19 Numerical Differentiation PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 5 Chapter 19 Numerical Differentiation PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Numerical Methods School of Mechanical Engineering Chung-Ang University
 Part 5 Chapter 19 Numerical Differentiation Prof. Hae-Jin Choi hjchoi@cau.ac.kr 1 Chapter Objectives l Understanding the application of high-accuracy numerical differentiation formulas for equispaced data.
Part 5 Chapter 19 Numerical Differentiation Prof. Hae-Jin Choi hjchoi@cau.ac.kr 1 Chapter Objectives l Understanding the application of high-accuracy numerical differentiation formulas for equispaced data.
Chapter 5: Numerical Integration and Differentiation
 Chapter 5: Numerical Integration and Differentiation PART I: Numerical Integration Newton-Cotes Integration Formulas The idea of Newton-Cotes formulas is to replace a complicated function or tabulated
Chapter 5: Numerical Integration and Differentiation PART I: Numerical Integration Newton-Cotes Integration Formulas The idea of Newton-Cotes formulas is to replace a complicated function or tabulated
Chap. 19: Numerical Differentiation
 Chap. 19: Numerical Differentiation Differentiation Definition of difference: y x f x x i x f x i As x is approaching zero, the difference becomes a derivative: dy dx lim x 0 f x i x f x i x 2 High-Accuracy
Chap. 19: Numerical Differentiation Differentiation Definition of difference: y x f x x i x f x i As x is approaching zero, the difference becomes a derivative: dy dx lim x 0 f x i x f x i x 2 High-Accuracy
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 5 Chapter 21 Numerical Differentiation PowerPoints organized by Dr. Michael R. Gustafson II, Duke University 1 All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 5 Chapter 21 Numerical Differentiation PowerPoints organized by Dr. Michael R. Gustafson II, Duke University 1 All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Gauss Elimination. Hsiao-Lung Chan Dept Electrical Engineering Chang Gung University, Taiwan
 Gauss Elimination Hsiao-Lung Chan Dept Electrical Engineering Chang Gung University, Taiwan chanhl@mail.cgu.edu.tw Solving small numbers of equations by graphical method The location of the intercept provides
Gauss Elimination Hsiao-Lung Chan Dept Electrical Engineering Chang Gung University, Taiwan chanhl@mail.cgu.edu.tw Solving small numbers of equations by graphical method The location of the intercept provides
Integration. Topic: Trapezoidal Rule. Major: General Engineering. Author: Autar Kaw, Charlie Barker.
 Integration Topic: Trapezoidal Rule Major: General Engineering Author: Autar Kaw, Charlie Barker 1 What is Integration Integration: The process of measuring the area under a function plotted on a graph.
Integration Topic: Trapezoidal Rule Major: General Engineering Author: Autar Kaw, Charlie Barker 1 What is Integration Integration: The process of measuring the area under a function plotted on a graph.
What are Numerical Methods? (1/3)
") What are Numerical Methods? (1/3) Numerical methods are techniques by which mathematical problems are formulated so that they can be solved by arithmetic and logic operations Because computers excel at
What are Numerical Methods? (1/3) Numerical methods are techniques by which mathematical problems are formulated so that they can be solved by arithmetic and logic operations Because computers excel at
Numerical Integra/on
 Numerical Integra/on The Trapezoidal Rule is a technique to approximate the definite integral where For 1 st order: f(a) f(b) a b Error Es/mate of Trapezoidal Rule Truncation error: From Newton-Gregory
Numerical Integra/on The Trapezoidal Rule is a technique to approximate the definite integral where For 1 st order: f(a) f(b) a b Error Es/mate of Trapezoidal Rule Truncation error: From Newton-Gregory
Then, Lagrange s interpolation formula is. 2. What is the Lagrange s interpolation formula to find, if three sets of values. are given.
 SRI RAMAKRISHNA INSTITUTE OF TECHNOLOGY, COIMBATORE- 10 DEPARTMENT OF SCIENCE AND HUMANITIES SUBJECT NUMERICAL METHODS & LINEAR PROGRAMMING ( SEMESTER IV ) IV- INTERPOLATION, NUMERICAL DIFFERENTIATION
SRI RAMAKRISHNA INSTITUTE OF TECHNOLOGY, COIMBATORE- 10 DEPARTMENT OF SCIENCE AND HUMANITIES SUBJECT NUMERICAL METHODS & LINEAR PROGRAMMING ( SEMESTER IV ) IV- INTERPOLATION, NUMERICAL DIFFERENTIATION
n = 4: 0 2( ) (4 0) ( t 2.67%) 8
 (4 0) ( t 2.67%) 8") 1 CHAPTER 19 19.1 A table of integrals can be consulted to determine 1 tanh dx ln cosh ax a Therefore, t gm gc gm gc d gm m gc d tanh t dt ln cosh t c d m cd gcd m d ln cosh gc d t ln cosh() m Since cosh()
1 CHAPTER 19 19.1 A table of integrals can be consulted to determine 1 tanh dx ln cosh ax a Therefore, t gm gc gm gc d gm m gc d tanh t dt ln cosh t c d m cd gcd m d ln cosh gc d t ln cosh() m Since cosh()
Numerical Methods School of Mechanical Engineering Chung-Ang University
 Part 2 Chapter 5 Roots: Bracketing Methods Prof. Hae-Jin Choi hjchoi@cau.ac.kr 1 Overview of Part 2 l To find the roots of general second order polynomial, the quadratic formula is used b b 2 2 - ± - 4ac
Part 2 Chapter 5 Roots: Bracketing Methods Prof. Hae-Jin Choi hjchoi@cau.ac.kr 1 Overview of Part 2 l To find the roots of general second order polynomial, the quadratic formula is used b b 2 2 - ± - 4ac
Numerical Methods. King Saud University
 Numerical Methods King Saud University Aims In this lecture, we will... find the approximate solutions of derivative (first- and second-order) and antiderivative (definite integral only). Numerical Differentiation
Numerical Methods King Saud University Aims In this lecture, we will... find the approximate solutions of derivative (first- and second-order) and antiderivative (definite integral only). Numerical Differentiation
Engg. Math. II (Unit-IV) Numerical Analysis
 Numerical Analysis") Dr. Satish Shukla of 33 Engg. Math. II (Unit-IV) Numerical Analysis Syllabus. Interpolation and Curve Fitting: Introduction to Interpolation; Calculus of Finite Differences; Finite Difference and Divided
Dr. Satish Shukla of 33 Engg. Math. II (Unit-IV) Numerical Analysis Syllabus. Interpolation and Curve Fitting: Introduction to Interpolation; Calculus of Finite Differences; Finite Difference and Divided
Numerical Methods School of Mechanical Engineering Chung-Ang University
 Part 2 Chapter 7 Optimization Prof. Hae-Jin Choi hjchoi@cau.ac.kr 1 Chapter Objectives l Understanding why and where optimization occurs in engineering and scientific problem solving. l Recognizing the
Part 2 Chapter 7 Optimization Prof. Hae-Jin Choi hjchoi@cau.ac.kr 1 Chapter Objectives l Understanding why and where optimization occurs in engineering and scientific problem solving. l Recognizing the
Lecture 8: Calculus and Differential Equations
 Lecture 8: Calculus and Differential Equations Dr. Mohammed Hawa Electrical Engineering Department University of Jordan EE201: Computer Applications. See Textbook Chapter 9. Numerical Methods MATLAB provides
Lecture 8: Calculus and Differential Equations Dr. Mohammed Hawa Electrical Engineering Department University of Jordan EE201: Computer Applications. See Textbook Chapter 9. Numerical Methods MATLAB provides
Lecture 8: Calculus and Differential Equations
 Lecture 8: Calculus and Differential Equations Dr. Mohammed Hawa Electrical Engineering Department University of Jordan EE21: Computer Applications. See Textbook Chapter 9. Numerical Methods MATLAB provides
Lecture 8: Calculus and Differential Equations Dr. Mohammed Hawa Electrical Engineering Department University of Jordan EE21: Computer Applications. See Textbook Chapter 9. Numerical Methods MATLAB provides
Numerical Integration of Functions
 Numerical Integration of Functions Berlin Chen Department of Computer Science & Information Engineering National Taiwan Normal University Reference: 1. Applied Numerical Methods with MATLAB for Engineers,
Numerical Integration of Functions Berlin Chen Department of Computer Science & Information Engineering National Taiwan Normal University Reference: 1. Applied Numerical Methods with MATLAB for Engineers,
SKMM 3023 Applied Numerical Methods
 UNIVERSITI TEKNOLOGI MALAYSIA SKMM 3023 Applied Numerical Methods Numerical Differentiation ibn Abdullah Faculty of Mechanical Engineering Òº ÙÐÐ ÚºÒÙÐÐ ¾¼½ SKMM 3023 Applied Numerical Methods Numerical
UNIVERSITI TEKNOLOGI MALAYSIA SKMM 3023 Applied Numerical Methods Numerical Differentiation ibn Abdullah Faculty of Mechanical Engineering Òº ÙÐÐ ÚºÒÙÐÐ ¾¼½ SKMM 3023 Applied Numerical Methods Numerical
GENG2140, S2, 2012 Week 7: Curve fitting
 GENG2140, S2, 2012 Week 7: Curve fitting Curve fitting is the process of constructing a curve, or mathematical function, f(x) that has the best fit to a series of data points Involves fitting lines and
GENG2140, S2, 2012 Week 7: Curve fitting Curve fitting is the process of constructing a curve, or mathematical function, f(x) that has the best fit to a series of data points Involves fitting lines and
ECE257 Numerical Methods and Scientific Computing. Ordinary Differential Equations
 ECE257 Numerical Methods and Scientific Computing Ordinary Differential Equations Today s s class: Stiffness Multistep Methods Stiff Equations Stiffness occurs in a problem where two or more independent
ECE257 Numerical Methods and Scientific Computing Ordinary Differential Equations Today s s class: Stiffness Multistep Methods Stiff Equations Stiffness occurs in a problem where two or more independent
Bindel, Spring 2012 Intro to Scientific Computing (CS 3220) Week 12: Monday, Apr 16. f(x) dx,
 Week 12: Monday, Apr 16. f(x) dx,") Panel integration Week 12: Monday, Apr 16 Suppose we want to compute the integral b a f(x) dx In estimating a derivative, it makes sense to use a locally accurate approximation to the function around the
Panel integration Week 12: Monday, Apr 16 Suppose we want to compute the integral b a f(x) dx In estimating a derivative, it makes sense to use a locally accurate approximation to the function around the
2D Plotting with Matlab
 GEEN 1300 Introduction to Engineering Computing Class Meeting #22 Monday, Nov. 9 th Engineering Computing and Problem Solving with Matlab 2-D plotting with Matlab Script files User-defined functions Matlab
GEEN 1300 Introduction to Engineering Computing Class Meeting #22 Monday, Nov. 9 th Engineering Computing and Problem Solving with Matlab 2-D plotting with Matlab Script files User-defined functions Matlab
Chapter 5 Roots of Equations: Bracketing Models. Gab-Byung Chae
 Chapter 5 Roots of Equations: Bracketing Models Gab-Byung Chae 2008 4 17 2 Chapter Objectives Studying Bracketing Methods Understanding what roots problems are and where they occur in engineering and science.
Chapter 5 Roots of Equations: Bracketing Models Gab-Byung Chae 2008 4 17 2 Chapter Objectives Studying Bracketing Methods Understanding what roots problems are and where they occur in engineering and science.
Numerical integration and differentiation. Unit IV. Numerical Integration and Differentiation. Plan of attack. Numerical integration.
 Unit IV Numerical Integration and Differentiation Numerical integration and differentiation quadrature classical formulas for equally spaced nodes improper integrals Gaussian quadrature and orthogonal
Unit IV Numerical Integration and Differentiation Numerical integration and differentiation quadrature classical formulas for equally spaced nodes improper integrals Gaussian quadrature and orthogonal
Numerical Integration
 Numerical Integration Sanzheng Qiao Department of Computing and Software McMaster University February, 2014 Outline 1 Introduction 2 Rectangle Rule 3 Trapezoid Rule 4 Error Estimates 5 Simpson s Rule 6
Numerical Integration Sanzheng Qiao Department of Computing and Software McMaster University February, 2014 Outline 1 Introduction 2 Rectangle Rule 3 Trapezoid Rule 4 Error Estimates 5 Simpson s Rule 6
Integration, differentiation, and root finding. Phys 420/580 Lecture 7
 Integration, differentiation, and root finding Phys 420/580 Lecture 7 Numerical integration Compute an approximation to the definite integral I = b Find area under the curve in the interval Trapezoid Rule:
Integration, differentiation, and root finding Phys 420/580 Lecture 7 Numerical integration Compute an approximation to the definite integral I = b Find area under the curve in the interval Trapezoid Rule:
USHA RAMA COLLEGE OF ENGINEERING & TECHNOLOGY
 Code No: R007/R0 Set No. I B.Tech I Semester Supplementary Examinations, Feb/Mar 04 MATHEMATICAL METHODS ( Common to Civil Engineering, Electrical & Electronics Engineering, Computer Science & Engineering,
Code No: R007/R0 Set No. I B.Tech I Semester Supplementary Examinations, Feb/Mar 04 MATHEMATICAL METHODS ( Common to Civil Engineering, Electrical & Electronics Engineering, Computer Science & Engineering,
MA6452 STATISTICS AND NUMERICAL METHODS UNIT IV NUMERICAL DIFFERENTIATION AND INTEGRATION
 MA6452 STATISTICS AND NUMERICAL METHODS UNIT IV NUMERICAL DIFFERENTIATION AND INTEGRATION By Ms. K. Vijayalakshmi Assistant Professor Department of Applied Mathematics SVCE NUMERICAL DIFFERENCE: 1.NEWTON
MA6452 STATISTICS AND NUMERICAL METHODS UNIT IV NUMERICAL DIFFERENTIATION AND INTEGRATION By Ms. K. Vijayalakshmi Assistant Professor Department of Applied Mathematics SVCE NUMERICAL DIFFERENCE: 1.NEWTON
Jim Lambers MAT 460/560 Fall Semester Practice Final Exam
 Jim Lambers MAT 460/560 Fall Semester 2009-10 Practice Final Exam 1. Let f(x) = sin 2x + cos 2x. (a) Write down the 2nd Taylor polynomial P 2 (x) of f(x) centered around x 0 = 0. (b) Write down the corresponding
Jim Lambers MAT 460/560 Fall Semester 2009-10 Practice Final Exam 1. Let f(x) = sin 2x + cos 2x. (a) Write down the 2nd Taylor polynomial P 2 (x) of f(x) centered around x 0 = 0. (b) Write down the corresponding
MA 3021: Numerical Analysis I Numerical Differentiation and Integration
 MA 3021: Numerical Analysis I Numerical Differentiation and Integration Suh-Yuh Yang ( 楊肅煜 ) Department of Mathematics, National Central University Jhongli District, Taoyuan City 32001, Taiwan syyang@math.ncu.edu.tw
MA 3021: Numerical Analysis I Numerical Differentiation and Integration Suh-Yuh Yang ( 楊肅煜 ) Department of Mathematics, National Central University Jhongli District, Taoyuan City 32001, Taiwan syyang@math.ncu.edu.tw
Numerical Integra/on
 Numerical Integra/on Applica/ons The Trapezoidal Rule is a technique to approximate the definite integral where For 1 st order: f(a) f(b) a b Error Es/mate of Trapezoidal Rule Truncation error: From Newton-Gregory
Numerical Integra/on Applica/ons The Trapezoidal Rule is a technique to approximate the definite integral where For 1 st order: f(a) f(b) a b Error Es/mate of Trapezoidal Rule Truncation error: From Newton-Gregory
ENGINEERING MATHEMATICS 4 (BDA34003)
") ENGINEERING MATHEMATICS 4 (BDA34003) Lecture Module 6: Numerical Integration Waluyo Adi Siswanto Universiti Tun Hussein Onn Malaysia This work is licensed under a Creative Commons Attribution 3.0 License.
ENGINEERING MATHEMATICS 4 (BDA34003) Lecture Module 6: Numerical Integration Waluyo Adi Siswanto Universiti Tun Hussein Onn Malaysia This work is licensed under a Creative Commons Attribution 3.0 License.
Extrapolation in Numerical Integration. Romberg Integration
 Extrapolation in Numerical Integration Romberg Integration Matthew Battaglia Joshua Berge Sara Case Yoobin Ji Jimu Ryoo Noah Wichrowski Introduction Extrapolation: the process of estimating beyond the
Extrapolation in Numerical Integration Romberg Integration Matthew Battaglia Joshua Berge Sara Case Yoobin Ji Jimu Ryoo Noah Wichrowski Introduction Extrapolation: the process of estimating beyond the
Numerical Analysis Solution of Algebraic Equation (non-linear equation) 1- Trial and Error. 2- Fixed point
 1- Trial and Error. 2- Fixed point") Numerical Analysis Solution of Algebraic Equation (non-linear equation) 1- Trial and Error In this method we assume initial value of x, and substitute in the equation. Then modify x and continue till we
Numerical Analysis Solution of Algebraic Equation (non-linear equation) 1- Trial and Error In this method we assume initial value of x, and substitute in the equation. Then modify x and continue till we
Rectilinear Motion. Velocity
 Rectilinear Motion Motion along a line Needed three things. Zero. Positive 3. Units This was our coordinate system Motion was a vector since it had magnitude and direction Average velocity Instantaneous
Rectilinear Motion Motion along a line Needed three things. Zero. Positive 3. Units This was our coordinate system Motion was a vector since it had magnitude and direction Average velocity Instantaneous
Engineering Mathematics through Applications
 89 80 Engineering Mathematics through Applications Finite Differences, Numerical Differentiations and Integrations 8 8 Engineering Mathematics through Applications Finite Differences, Numerical Differentiations
89 80 Engineering Mathematics through Applications Finite Differences, Numerical Differentiations and Integrations 8 8 Engineering Mathematics through Applications Finite Differences, Numerical Differentiations
Numerical and Statistical Methods
 F.Y. B.Sc.(IT) : Sem. II Numerical and Statistical Methods Time : ½ Hrs.] Prelim Question Paper Solution [Marks : 75 Q. Attempt any THREE of the following : [5] Q.(a) What is a mathematical model? With
F.Y. B.Sc.(IT) : Sem. II Numerical and Statistical Methods Time : ½ Hrs.] Prelim Question Paper Solution [Marks : 75 Q. Attempt any THREE of the following : [5] Q.(a) What is a mathematical model? With
Second Order ODEs. CSCC51H- Numerical Approx, Int and ODEs p.130/177
 Second Order ODEs Often physical or biological systems are best described by second or higher-order ODEs. That is, second or higher order derivatives appear in the mathematical model of the system. For
Second Order ODEs Often physical or biological systems are best described by second or higher-order ODEs. That is, second or higher order derivatives appear in the mathematical model of the system. For
At right: Closeups of the graphs of. with WINDOW settings Xmin=-1, Xmax=1, Xscl=0.1, Ymin=-1, Ymax=1, Yscl=0.1
 Know the graphs of f(x) = x n for n = odd, positive: 1, 3, 5, The Domain is All Real Numbers, (, ), or R. The Range is All Real Numbers, (, ), or R. It is an Odd function because f( x) = f(x). It is symmetric
Know the graphs of f(x) = x n for n = odd, positive: 1, 3, 5, The Domain is All Real Numbers, (, ), or R. The Range is All Real Numbers, (, ), or R. It is an Odd function because f( x) = f(x). It is symmetric
Numerical and Statistical Methods
 F.Y. B.Sc.(IT) : Sem. II Numerical and Statistical Methods Time : ½ Hrs.] Prelim Question Paper Solution [Marks : 75 Q. Attempt any THREE of the following : [5] Q.(a) What is a mathematical model? With
F.Y. B.Sc.(IT) : Sem. II Numerical and Statistical Methods Time : ½ Hrs.] Prelim Question Paper Solution [Marks : 75 Q. Attempt any THREE of the following : [5] Q.(a) What is a mathematical model? With
SOLUTIONS to Exercises from Optimization
 SOLUTIONS to Exercises from Optimization. Use the bisection method to find the root correct to 6 decimal places: 3x 3 + x 2 = x + 5 SOLUTION: For the root finding algorithm, we need to rewrite the equation
SOLUTIONS to Exercises from Optimization. Use the bisection method to find the root correct to 6 decimal places: 3x 3 + x 2 = x + 5 SOLUTION: For the root finding algorithm, we need to rewrite the equation
Review. Numerical Methods Lecture 22. Prof. Jinbo Bi CSE, UConn
 Review Taylor Series and Error Analysis Roots of Equations Linear Algebraic Equations Optimization Numerical Differentiation and Integration Ordinary Differential Equations Partial Differential Equations
Review Taylor Series and Error Analysis Roots of Equations Linear Algebraic Equations Optimization Numerical Differentiation and Integration Ordinary Differential Equations Partial Differential Equations
Numerical Integration (Quadrature) Another application for our interpolation tools!
 Another application for our interpolation tools!") Numerical Integration (Quadrature) Another application for our interpolation tools! Integration: Area under a curve Curve = data or function Integrating data Finite number of data points spacing specified
Numerical Integration (Quadrature) Another application for our interpolation tools! Integration: Area under a curve Curve = data or function Integrating data Finite number of data points spacing specified
Variational Methods & Optimal Control
 Variational Methods & Optimal Control lecture 12 Matthew Roughan Discipline of Applied Mathematics School of Mathematical Sciences University of Adelaide April 14, 216
Variational Methods & Optimal Control lecture 12 Matthew Roughan Discipline of Applied Mathematics School of Mathematical Sciences University of Adelaide April 14, 216
BSM510 Numerical Analysis
 BSM510 Numerical Analysis Polynomial Interpolation Prof. Manar Mohaisen Department of EEC Engineering Review of Precedent Lecture Polynomial Regression Multiple Linear Regression Nonlinear Regression Lecture
BSM510 Numerical Analysis Polynomial Interpolation Prof. Manar Mohaisen Department of EEC Engineering Review of Precedent Lecture Polynomial Regression Multiple Linear Regression Nonlinear Regression Lecture
Virtual University of Pakistan
 Virtual University of Pakistan File Version v.0.0 Prepared For: Final Term Note: Use Table Of Content to view the Topics, In PDF(Portable Document Format) format, you can check Bookmarks menu Disclaimer:
Virtual University of Pakistan File Version v.0.0 Prepared For: Final Term Note: Use Table Of Content to view the Topics, In PDF(Portable Document Format) format, you can check Bookmarks menu Disclaimer:
Numerical Solution of f(x) = 0
 = 0") Numerical Solution of f(x) = 0 Gerald W. Recktenwald Department of Mechanical Engineering Portland State University gerry@pdx.edu ME 350: Finding roots of f(x) = 0 Overview Topics covered in these slides
Numerical Solution of f(x) = 0 Gerald W. Recktenwald Department of Mechanical Engineering Portland State University gerry@pdx.edu ME 350: Finding roots of f(x) = 0 Overview Topics covered in these slides
Input: A set (x i -yy i ) data. Output: Function value at arbitrary point x. What for x = 1.2?
 data. Output: Function value at arbitrary point x. What for x = 1.2?") Applied Numerical Analysis Interpolation Lecturer: Emad Fatemizadeh Interpolation Input: A set (x i -yy i ) data. Output: Function value at arbitrary point x. 0 1 4 1-3 3 9 What for x = 1.? Interpolation
Applied Numerical Analysis Interpolation Lecturer: Emad Fatemizadeh Interpolation Input: A set (x i -yy i ) data. Output: Function value at arbitrary point x. 0 1 4 1-3 3 9 What for x = 1.? Interpolation
TABLE OF CONTENTS INTRODUCTION, APPROXIMATION & ERRORS 1. Chapter Introduction to numerical methods 1 Multiple-choice test 7 Problem set 9
 TABLE OF CONTENTS INTRODUCTION, APPROXIMATION & ERRORS 1 Chapter 01.01 Introduction to numerical methods 1 Multiple-choice test 7 Problem set 9 Chapter 01.02 Measuring errors 11 True error 11 Relative
TABLE OF CONTENTS INTRODUCTION, APPROXIMATION & ERRORS 1 Chapter 01.01 Introduction to numerical methods 1 Multiple-choice test 7 Problem set 9 Chapter 01.02 Measuring errors 11 True error 11 Relative
Notation Nodes are data points at which functional values are available or at which you wish to compute functional values At the nodes fx i
 LECTURE 6 NUMERICAL DIFFERENTIATION To find discrete approximations to differentiation (since computers can only deal with functional values at discrete points) Uses of numerical differentiation To represent
LECTURE 6 NUMERICAL DIFFERENTIATION To find discrete approximations to differentiation (since computers can only deal with functional values at discrete points) Uses of numerical differentiation To represent
Week 10 TENTATIVE SCHEDULE NUMERICAL APPROXIMATION LECTURE # 10
 TENTATIVE SCHEDULE INTRODUCTION TO SCIENTIFIC & ENG. COMPUTING BIL 108E, CRN 44448 Week.9_ Polynomials Examples Week.10_ Application of curve fitting : Approximation & Inregration Dr. Feyzi HAZNEDAROĞLU
TENTATIVE SCHEDULE INTRODUCTION TO SCIENTIFIC & ENG. COMPUTING BIL 108E, CRN 44448 Week.9_ Polynomials Examples Week.10_ Application of curve fitting : Approximation & Inregration Dr. Feyzi HAZNEDAROĞLU
INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad
 Dundigal, Hyderabad") 1 P a g e INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad - 500 04 Name : Mathematics-II Code : A0006 Class : II B. Tech I Semester Branch : CIVIL Year : 016 017 FRESHMAN ENGINEERING
1 P a g e INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad - 500 04 Name : Mathematics-II Code : A0006 Class : II B. Tech I Semester Branch : CIVIL Year : 016 017 FRESHMAN ENGINEERING
INSTITUTE OF AERONAUTICAL ENGINEERING Dundigal, Hyderabad MECHANICAL ENGINEERING TUTORIAL QUESTION BANK
 Course Name Course Code Class Branch INSTITUTE OF AERONAUTICAL ENGINEERING Dundigal, Hyderabad - 500 043 Mathematics-II A30006 II-I B. Tech Freshman Engineering Year 016 017 Course Faculty MECHANICAL ENGINEERING
Course Name Course Code Class Branch INSTITUTE OF AERONAUTICAL ENGINEERING Dundigal, Hyderabad - 500 043 Mathematics-II A30006 II-I B. Tech Freshman Engineering Year 016 017 Course Faculty MECHANICAL ENGINEERING
SBAME CALCULUS OF FINITE DIFFERENCES AND NUMERICAL ANLAYSIS-I Units : I-V
 SBAME CALCULUS OF FINITE DIFFERENCES AND NUMERICAL ANLAYSIS-I Units : I-V Unit I-Syllabus Solutions of Algebraic and Transcendental equations, Bisection method, Iteration Method, Regula Falsi method, Newton
SBAME CALCULUS OF FINITE DIFFERENCES AND NUMERICAL ANLAYSIS-I Units : I-V Unit I-Syllabus Solutions of Algebraic and Transcendental equations, Bisection method, Iteration Method, Regula Falsi method, Newton
FINITE DIFFERENCES. Lecture 1: (a) Operators (b) Forward Differences and their calculations. (c) Backward Differences and their calculations.
 Operators (b) Forward Differences and their calculations. (c) Backward Differences and their calculations.") FINITE DIFFERENCES Lecture 1: (a) Operators (b) Forward Differences and their calculations. (c) Backward Differences and their calculations. 1. Introduction When a function is known explicitly, it is easy
FINITE DIFFERENCES Lecture 1: (a) Operators (b) Forward Differences and their calculations. (c) Backward Differences and their calculations. 1. Introduction When a function is known explicitly, it is easy
Section 6.6 Gaussian Quadrature
 Section 6.6 Gaussian Quadrature Key Terms: Method of undetermined coefficients Nonlinear systems Gaussian quadrature Error Legendre polynomials Inner product Adapted from http://pathfinder.scar.utoronto.ca/~dyer/csca57/book_p/node44.html
Section 6.6 Gaussian Quadrature Key Terms: Method of undetermined coefficients Nonlinear systems Gaussian quadrature Error Legendre polynomials Inner product Adapted from http://pathfinder.scar.utoronto.ca/~dyer/csca57/book_p/node44.html
Digital Elevation Models. Using elevation data in raster format in a GIS
 Digital Elevation Models Using elevation data in raster format in a GIS What is a Digital Elevation Model (DEM)? Digital representation of topography Model based on scale of original data Commonly a raster
Digital Elevation Models Using elevation data in raster format in a GIS What is a Digital Elevation Model (DEM)? Digital representation of topography Model based on scale of original data Commonly a raster
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 1 Chapter 4 Roundoff and Truncation Errors PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 1 Chapter 4 Roundoff and Truncation Errors PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
MATH 10550, EXAM 2 SOLUTIONS. 1. Find an equation for the tangent line to. f(x) = sin x cos x. 2 which is the slope of the tangent line at
 = sin x cos x. 2 which is the slope of the tangent line at") MATH 100, EXAM SOLUTIONS 1. Find an equation for the tangent line to at the point ( π 4, 0). f(x) = sin x cos x f (x) = cos(x) + sin(x) Thus, f ( π 4 ) = which is the slope of the tangent line at ( π 4,
MATH 100, EXAM SOLUTIONS 1. Find an equation for the tangent line to at the point ( π 4, 0). f(x) = sin x cos x f (x) = cos(x) + sin(x) Thus, f ( π 4 ) = which is the slope of the tangent line at ( π 4,
Research Computing with Python, Lecture 7, Numerical Integration and Solving Ordinary Differential Equations
 Research Computing with Python, Lecture 7, Numerical Integration and Solving Ordinary Differential Equations Ramses van Zon SciNet HPC Consortium November 25, 2014 Ramses van Zon (SciNet HPC Consortium)Research
Research Computing with Python, Lecture 7, Numerical Integration and Solving Ordinary Differential Equations Ramses van Zon SciNet HPC Consortium November 25, 2014 Ramses van Zon (SciNet HPC Consortium)Research
SOLUTION OF EQUATION AND EIGENVALUE PROBLEMS PART A( 2 MARKS)
") CHENDU COLLEGE OF ENGINEERING AND TECHNOLOGY (Approved by AICTE New Delhi, Affiliated to Anna University Chennai. Zamin Endathur Village, Madurntakam Taluk, Kancheepuram Dist.-603311.) MA6459 - NUMERICAL
CHENDU COLLEGE OF ENGINEERING AND TECHNOLOGY (Approved by AICTE New Delhi, Affiliated to Anna University Chennai. Zamin Endathur Village, Madurntakam Taluk, Kancheepuram Dist.-603311.) MA6459 - NUMERICAL
8.3 Numerical Quadrature, Continued
 8.3 Numerical Quadrature, Continued Ulrich Hoensch Friday, October 31, 008 Newton-Cotes Quadrature General Idea: to approximate the integral I (f ) of a function f : [a, b] R, use equally spaced nodes
8.3 Numerical Quadrature, Continued Ulrich Hoensch Friday, October 31, 008 Newton-Cotes Quadrature General Idea: to approximate the integral I (f ) of a function f : [a, b] R, use equally spaced nodes
Topic 6a Numerical Integration
 Course Instructor Dr. Raymond C. Rumpf Office: A 337 Phone: (915) 747 6958 E Mail: rcrumpf@utep.edu Topic 6a umerical Integration EE 4386/5301 Computational Methods in EE Outline Introduction Discrete
Course Instructor Dr. Raymond C. Rumpf Office: A 337 Phone: (915) 747 6958 E Mail: rcrumpf@utep.edu Topic 6a umerical Integration EE 4386/5301 Computational Methods in EE Outline Introduction Discrete
Differential Lengths, Surfaces and Volumes
 Differential Lengths, Surfaces and Volumes When integrating along lines, over surfaces, or throughout volumes, the ranges of the respective variables define the limits of the respective integrations. In
Differential Lengths, Surfaces and Volumes When integrating along lines, over surfaces, or throughout volumes, the ranges of the respective variables define the limits of the respective integrations. In
Ch. 03 Numerical Quadrature. Andrea Mignone Physics Department, University of Torino AA
 Ch. 03 Numerical Quadrature Andrea Mignone Physics Department, University of Torino AA 2017-2018 Numerical Quadrature In numerical analysis quadrature refers to the computation of definite integrals. y
Ch. 03 Numerical Quadrature Andrea Mignone Physics Department, University of Torino AA 2017-2018 Numerical Quadrature In numerical analysis quadrature refers to the computation of definite integrals. y
I II III IV V VI VII VIII IX X Total
 1 of 16 HAND IN Answers recorded on exam paper. DEPARTMENT OF MATHEMATICS AND STATISTICS QUEEN S UNIVERSITY AT KINGSTON MATH 121 - APR 2017 Section 700 - CDS Students ONLY Instructor: A. Ableson INSTRUCTIONS:
1 of 16 HAND IN Answers recorded on exam paper. DEPARTMENT OF MATHEMATICS AND STATISTICS QUEEN S UNIVERSITY AT KINGSTON MATH 121 - APR 2017 Section 700 - CDS Students ONLY Instructor: A. Ableson INSTRUCTIONS:
2.29 Numerical Fluid Mechanics Spring 2015 Lecture 9
 Spring 2015 Lecture 9 REVIEW Lecture 8: Direct Methods for solving (linear) algebraic equations Gauss Elimination LU decomposition/factorization Error Analysis for Linear Systems and Condition Numbers
Spring 2015 Lecture 9 REVIEW Lecture 8: Direct Methods for solving (linear) algebraic equations Gauss Elimination LU decomposition/factorization Error Analysis for Linear Systems and Condition Numbers
Computational Methods for Engineers Programming in Engineering Problem Solving
 Computational Methods for Engineers Programming in Engineering Problem Solving Abu Hasan Abdullah January 6, 2009 Abu Hasan Abdullah 2009 An Engineering Problem Problem Statement: The length of a belt
Computational Methods for Engineers Programming in Engineering Problem Solving Abu Hasan Abdullah January 6, 2009 Abu Hasan Abdullah 2009 An Engineering Problem Problem Statement: The length of a belt
Integration of Ordinary Differential Equations
 Integration of Ordinary Differential Equations Com S 477/577 Nov 7, 00 1 Introduction The solution of differential equations is an important problem that arises in a host of areas. Many differential equations
Integration of Ordinary Differential Equations Com S 477/577 Nov 7, 00 1 Introduction The solution of differential equations is an important problem that arises in a host of areas. Many differential equations
Interpolation Theory
 Numerical Analysis Massoud Malek Interpolation Theory The concept of interpolation is to select a function P (x) from a given class of functions in such a way that the graph of y P (x) passes through the
Numerical Analysis Massoud Malek Interpolation Theory The concept of interpolation is to select a function P (x) from a given class of functions in such a way that the graph of y P (x) passes through the
Curve Fitting and Interpolation
 Chapter 5 Curve Fitting and Interpolation 5.1 Basic Concepts Consider a set of (x, y) data pairs (points) collected during an experiment, Curve fitting: is a procedure to develop or evaluate mathematical
Chapter 5 Curve Fitting and Interpolation 5.1 Basic Concepts Consider a set of (x, y) data pairs (points) collected during an experiment, Curve fitting: is a procedure to develop or evaluate mathematical
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF MATHEMATICS ACADEMIC YEAR / EVEN SEMESTER QUESTION BANK
 KINGS COLLEGE OF ENGINEERING MA5-NUMERICAL METHODS DEPARTMENT OF MATHEMATICS ACADEMIC YEAR 00-0 / EVEN SEMESTER QUESTION BANK SUBJECT NAME: NUMERICAL METHODS YEAR/SEM: II / IV UNIT - I SOLUTION OF EQUATIONS
KINGS COLLEGE OF ENGINEERING MA5-NUMERICAL METHODS DEPARTMENT OF MATHEMATICS ACADEMIC YEAR 00-0 / EVEN SEMESTER QUESTION BANK SUBJECT NAME: NUMERICAL METHODS YEAR/SEM: II / IV UNIT - I SOLUTION OF EQUATIONS
Review for Exam 2 Ben Wang and Mark Styczynski
 Review for Exam Ben Wang and Mark Styczynski This is a rough approximation of what we went over in the review session. This is actually more detailed in portions than what we went over. Also, please note
Review for Exam Ben Wang and Mark Styczynski This is a rough approximation of what we went over in the review session. This is actually more detailed in portions than what we went over. Also, please note
(0, 0), (1, ), (2, ), (3, ), (4, ), (5, ), (6, ).
, (1, ), (2, ), (3, ), (4, ), (5, ), (6, ).") 1 Interpolation: The method of constructing new data points within the range of a finite set of known data points That is if (x i, y i ), i = 1, N are known, with y i the dependent variable and x i [x
1 Interpolation: The method of constructing new data points within the range of a finite set of known data points That is if (x i, y i ), i = 1, N are known, with y i the dependent variable and x i [x
AM205: Assignment 3 (due 5 PM, October 20)
") AM25: Assignment 3 (due 5 PM, October 2) For this assignment, first complete problems 1, 2, 3, and 4, and then complete either problem 5 (on theory) or problem 6 (on an application). If you submit answers
AM25: Assignment 3 (due 5 PM, October 2) For this assignment, first complete problems 1, 2, 3, and 4, and then complete either problem 5 (on theory) or problem 6 (on an application). If you submit answers
SECTION 7: CURVE FITTING. MAE 4020/5020 Numerical Methods with MATLAB
 SECTION 7: CURVE FITTING MAE 4020/5020 Numerical Methods with MATLAB 2 Introduction Curve Fitting 3 Often have data,, that is a function of some independent variable,, but the underlying relationship is
SECTION 7: CURVE FITTING MAE 4020/5020 Numerical Methods with MATLAB 2 Introduction Curve Fitting 3 Often have data,, that is a function of some independent variable,, but the underlying relationship is
Scientific Computing. Roots of Equations
 ECE257 Numerical Methods and Scientific Computing Roots of Equations Today s s class: Roots of Equations Polynomials Polynomials A polynomial is of the form: ( x) = a 0 + a 1 x + a 2 x 2 +L+ a n x n f
ECE257 Numerical Methods and Scientific Computing Roots of Equations Today s s class: Roots of Equations Polynomials Polynomials A polynomial is of the form: ( x) = a 0 + a 1 x + a 2 x 2 +L+ a n x n f
Numerical Methods for Engineers
 Numerical Methods for Engineers SEVENTH EDITION Steven C Chopra Berger Chair in Computing and Engineering Tufts University Raymond P. Canal Professor Emeritus of Civil Engineering of Michiaan University
Numerical Methods for Engineers SEVENTH EDITION Steven C Chopra Berger Chair in Computing and Engineering Tufts University Raymond P. Canal Professor Emeritus of Civil Engineering of Michiaan University
MA 8019: Numerical Analysis I Solution of Nonlinear Equations
 MA 8019: Numerical Analysis I Solution of Nonlinear Equations Suh-Yuh Yang ( 楊肅煜 ) Department of Mathematics, National Central University Jhongli District, Taoyuan City 32001, Taiwan syyang@math.ncu.edu.tw
MA 8019: Numerical Analysis I Solution of Nonlinear Equations Suh-Yuh Yang ( 楊肅煜 ) Department of Mathematics, National Central University Jhongli District, Taoyuan City 32001, Taiwan syyang@math.ncu.edu.tw
BACHELOR OF COMPUTER APPLICATIONS (BCA) (Revised) Term-End Examination December, 2015 BCS-054 : COMPUTER ORIENTED NUMERICAL TECHNIQUES
 (Revised) Term-End Examination December, 2015 BCS-054 : COMPUTER ORIENTED NUMERICAL TECHNIQUES") No. of Printed Pages : 5 BCS-054 BACHELOR OF COMPUTER APPLICATIONS (BCA) (Revised) Term-End Examination December, 2015 058b9 BCS-054 : COMPUTER ORIENTED NUMERICAL TECHNIQUES Time : 3 hours Maximum Marks
No. of Printed Pages : 5 BCS-054 BACHELOR OF COMPUTER APPLICATIONS (BCA) (Revised) Term-End Examination December, 2015 058b9 BCS-054 : COMPUTER ORIENTED NUMERICAL TECHNIQUES Time : 3 hours Maximum Marks
M.SC. PHYSICS - II YEAR
 MANONMANIAM SUNDARANAR UNIVERSITY DIRECTORATE OF DISTANCE & CONTINUING EDUCATION TIRUNELVELI 627012, TAMIL NADU M.SC. PHYSICS - II YEAR DKP26 - NUMERICAL METHODS (From the academic year 2016-17) Most Student
MANONMANIAM SUNDARANAR UNIVERSITY DIRECTORATE OF DISTANCE & CONTINUING EDUCATION TIRUNELVELI 627012, TAMIL NADU M.SC. PHYSICS - II YEAR DKP26 - NUMERICAL METHODS (From the academic year 2016-17) Most Student
Optimization using Calculus. Optimization of Functions of Multiple Variables subject to Equality Constraints
 Optimization using Calculus Optimization of Functions of Multiple Variables subject to Equality Constraints 1 Objectives Optimization of functions of multiple variables subjected to equality constraints
Optimization using Calculus Optimization of Functions of Multiple Variables subject to Equality Constraints 1 Objectives Optimization of functions of multiple variables subjected to equality constraints
MA 114 Worksheet # 17: Integration by trig substitution
 MA Worksheet # 7: Integration by trig substitution. Conceptual Understanding: Given identity sin θ + cos θ =, prove that: sec θ = tan θ +. Given x = a sin(θ) with a > and π θ π, show that a x = a cos θ.
MA Worksheet # 7: Integration by trig substitution. Conceptual Understanding: Given identity sin θ + cos θ =, prove that: sec θ = tan θ +. Given x = a sin(θ) with a > and π θ π, show that a x = a cos θ.
MATH 200 WEEK 5 - WEDNESDAY DIRECTIONAL DERIVATIVE
 WEEK 5 - WEDNESDAY DIRECTIONAL DERIVATIVE GOALS Be able to compute a gradient vector, and use it to compute a directional derivative of a given function in a given direction. Be able to use the fact that
WEEK 5 - WEDNESDAY DIRECTIONAL DERIVATIVE GOALS Be able to compute a gradient vector, and use it to compute a directional derivative of a given function in a given direction. Be able to use the fact that
Interpolation and Approximation
 Interpolation and Approximation The Basic Problem: Approximate a continuous function f(x), by a polynomial p(x), over [a, b]. f(x) may only be known in tabular form. f(x) may be expensive to compute. Definition:
Interpolation and Approximation The Basic Problem: Approximate a continuous function f(x), by a polynomial p(x), over [a, b]. f(x) may only be known in tabular form. f(x) may be expensive to compute. Definition:
INTERPOLATION Background Polynomial Approximation Problem:
 INTERPOLATION Background Polynomial Approximation Problem: given f(x) C[a, b], find P n (x) = a 0 + a 1 x + a 2 x 2 + + a n x n with P n (x) close to f(x) for x [a, b]. Motivations: f(x) might be difficult
INTERPOLATION Background Polynomial Approximation Problem: given f(x) C[a, b], find P n (x) = a 0 + a 1 x + a 2 x 2 + + a n x n with P n (x) close to f(x) for x [a, b]. Motivations: f(x) might be difficult
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
Simulation on Magnetic Field Characteristics of Permanent-Magnet Seed-Metering Device
 Simulation on Magnetic Field Characteristics of Permanent-Magnet Seed-Metering Device Jing Wang, Jianping Hu, Qirui Wang, and Xun Wang ey Laboratory of Modern Agricultural Equipment and Technology, Ministry
Simulation on Magnetic Field Characteristics of Permanent-Magnet Seed-Metering Device Jing Wang, Jianping Hu, Qirui Wang, and Xun Wang ey Laboratory of Modern Agricultural Equipment and Technology, Ministry
INTERPOLATION. and y i = cos x i, i = 0, 1, 2 This gives us the three points. Now find a quadratic polynomial. p(x) = a 0 + a 1 x + a 2 x 2.
 = a 0 + a 1 x + a 2 x 2.") INTERPOLATION Interpolation is a process of finding a formula (often a polynomial) whose graph will pass through a given set of points (x, y). As an example, consider defining and x 0 = 0, x 1 = π/4, x
INTERPOLATION Interpolation is a process of finding a formula (often a polynomial) whose graph will pass through a given set of points (x, y). As an example, consider defining and x 0 = 0, x 1 = π/4, x
Lecture 8. Root finding II
 1 Introduction Lecture 8 Root finding II In the previous lecture we considered the bisection root-bracketing algorithm. It requires only that the function be continuous and that we have a root bracketed
1 Introduction Lecture 8 Root finding II In the previous lecture we considered the bisection root-bracketing algorithm. It requires only that the function be continuous and that we have a root bracketed
Solution of Nonlinear Equations
 Solution of Nonlinear Equations In many engineering applications, there are cases when one needs to solve nonlinear algebraic or trigonometric equations or set of equations. These are also common in Civil
Solution of Nonlinear Equations In many engineering applications, there are cases when one needs to solve nonlinear algebraic or trigonometric equations or set of equations. These are also common in Civil
CS 450 Numerical Analysis. Chapter 8: Numerical Integration and Differentiation
 Lecture slides based on the textbook Scientific Computing: An Introductory Survey by Michael T. Heath, copyright c 2018 by the Society for Industrial and Applied Mathematics. http://www.siam.org/books/cl80
Lecture slides based on the textbook Scientific Computing: An Introductory Survey by Michael T. Heath, copyright c 2018 by the Society for Industrial and Applied Mathematics. http://www.siam.org/books/cl80
MA1023-Methods of Mathematics-15S2 Tutorial 1
 Tutorial 1 the week starting from 19/09/2016. Q1. Consider the function = 1. Write down the nth degree Taylor Polynomial near > 0. 2. Show that the remainder satisfies, < if > > 0 if > > 0 3. Show that
Tutorial 1 the week starting from 19/09/2016. Q1. Consider the function = 1. Write down the nth degree Taylor Polynomial near > 0. 2. Show that the remainder satisfies, < if > > 0 if > > 0 3. Show that
The polar coordinates
 The polar coordinates 1 2 3 4 Graphing in polar coordinates 5 6 7 8 Area and length in polar coordinates 9 10 11 Partial deravitive 12 13 14 15 16 17 18 19 20 Double Integral 21 22 23 24 25 26 27 Triple
The polar coordinates 1 2 3 4 Graphing in polar coordinates 5 6 7 8 Area and length in polar coordinates 9 10 11 Partial deravitive 12 13 14 15 16 17 18 19 20 Double Integral 21 22 23 24 25 26 27 Triple
Finding Roots of Equations
 Finding Roots of Equations Solution Methods Overview Bisection/Half-interval Search Method of false position/regula Falsi Secant Method Newton Raphson Iteration Method Many more. Open Methods Bracketing
Finding Roots of Equations Solution Methods Overview Bisection/Half-interval Search Method of false position/regula Falsi Secant Method Newton Raphson Iteration Method Many more. Open Methods Bracketing
UNIT-II INTERPOLATION & APPROXIMATION
 UNIT-II INTERPOLATION & APPROXIMATION LAGRANGE POLYNAMIAL 1. Find the polynomial by using Lagrange s formula and hence find for : 0 1 2 5 : 2 3 12 147 : 0 1 2 5 : 0 3 12 147 Lagrange s interpolation formula,
UNIT-II INTERPOLATION & APPROXIMATION LAGRANGE POLYNAMIAL 1. Find the polynomial by using Lagrange s formula and hence find for : 0 1 2 5 : 2 3 12 147 : 0 1 2 5 : 0 3 12 147 Lagrange s interpolation formula,
MTH4101 CALCULUS II REVISION NOTES. 1. COMPLEX NUMBERS (Thomas Appendix 7 + lecture notes) ax 2 + bx + c = 0. x = b ± b 2 4ac 2a. i = 1.
 ax 2 + bx + c = 0. x = b ± b 2 4ac 2a. i = 1.") MTH4101 CALCULUS II REVISION NOTES 1. COMPLEX NUMBERS (Thomas Appendix 7 + lecture notes) 1.1 Introduction Types of numbers (natural, integers, rationals, reals) The need to solve quadratic equations:
MTH4101 CALCULUS II REVISION NOTES 1. COMPLEX NUMBERS (Thomas Appendix 7 + lecture notes) 1.1 Introduction Types of numbers (natural, integers, rationals, reals) The need to solve quadratic equations:
Finding the Roots of f(x) = 0. Gerald W. Recktenwald Department of Mechanical Engineering Portland State University
 = 0. Gerald W. Recktenwald Department of Mechanical Engineering Portland State University") Finding the Roots of f(x) = 0 Gerald W. Recktenwald Department of Mechanical Engineering Portland State University gerry@me.pdx.edu These slides are a supplement to the book Numerical Methods with Matlab:
Finding the Roots of f(x) = 0 Gerald W. Recktenwald Department of Mechanical Engineering Portland State University gerry@me.pdx.edu These slides are a supplement to the book Numerical Methods with Matlab: