EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
|
|
|
- Peter Perkins
- 6 years ago
- Views:
Transcription
1 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science
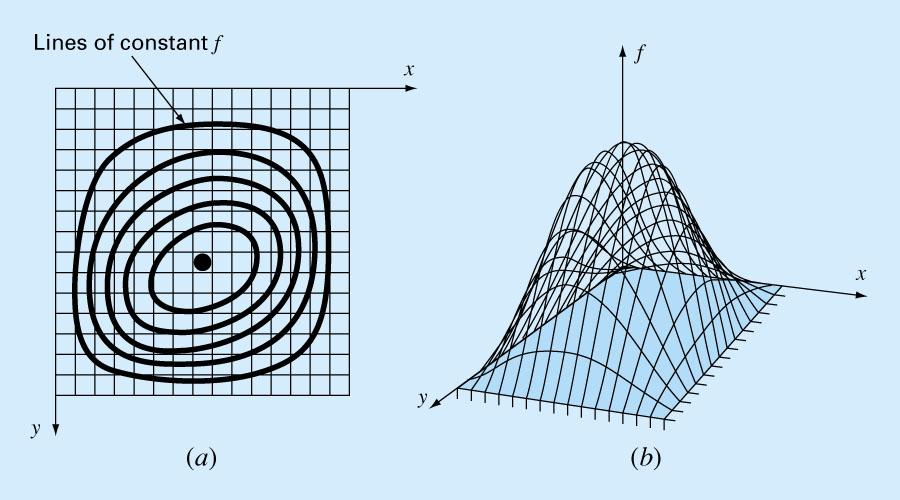
2 Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one variable f(x 1, x 2,, x n ) We want to find the values of x 1, x 2,, x n that give f() the largest (or smallest) possible value Graphical solution is not possible, but a graphical picture helps understanding Hilltops and contour maps
3
4 Methods of solution Direct or non-gradient methods do not require derivatives Grid search Random search One variable at a time Line searches and Powell s method Simplex optimization
5 Gradient methods use first and possibly second derivatives Gradient is the vector of first partials Hessian is the matrix of second partials Steepest ascent/descent Conjugate gradient Newton s method Quasi-Newton methods
6 Grid and Random Search Given a function and limits on each variable, generate a set of random points in the domain, and eventually choose the one with the largest function value Alternatively, divide the interval on each variable into small segments and check the function for all possible combinations
7 Features of Random and Grid Slow and inefficient Search Requires knowledge of domain Works even for discontinuous functions Poor in high dimension Grid search can be used iteratively, with progressively narrowing domains
8 Line searches Given a starting point and a direction, search for the maximum, or for a good next point, in that direction. Equivalent to one dimensional optimization, so can use Newton s method or another method from previous chapter Different methods use different directions
9 x v ( x, x,, x ) 1 2 ( v, v,, v ) 1 2 n n f( x) f( x, x,, x ) 1 2 gλ( ) f ( x λ v) n
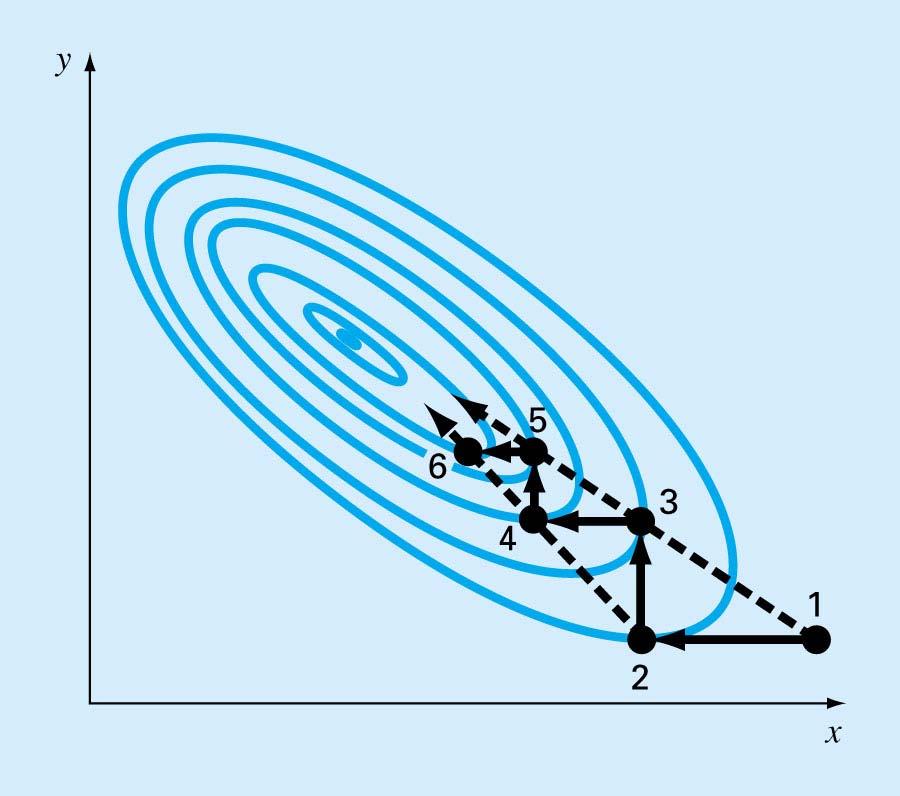
10 One-Variable-at-a Time Search Given a function f() of n variables, search in the direction in which only variable 1, changes Then search in the direction from that point in which only variable 2 changes, etc. Slow and inefficient in general Can speed up by searching in a direction after n changes (pattern direction)
11
12 Powell s Method If f() is quadratic, and if two points are found by line searches in the same direction from two different starting points, then the line joining the two ending points (a conjugate direction) heads toward the optimum Since many functions we encounter are approximately quadratic near the optimum, this can be effective
13
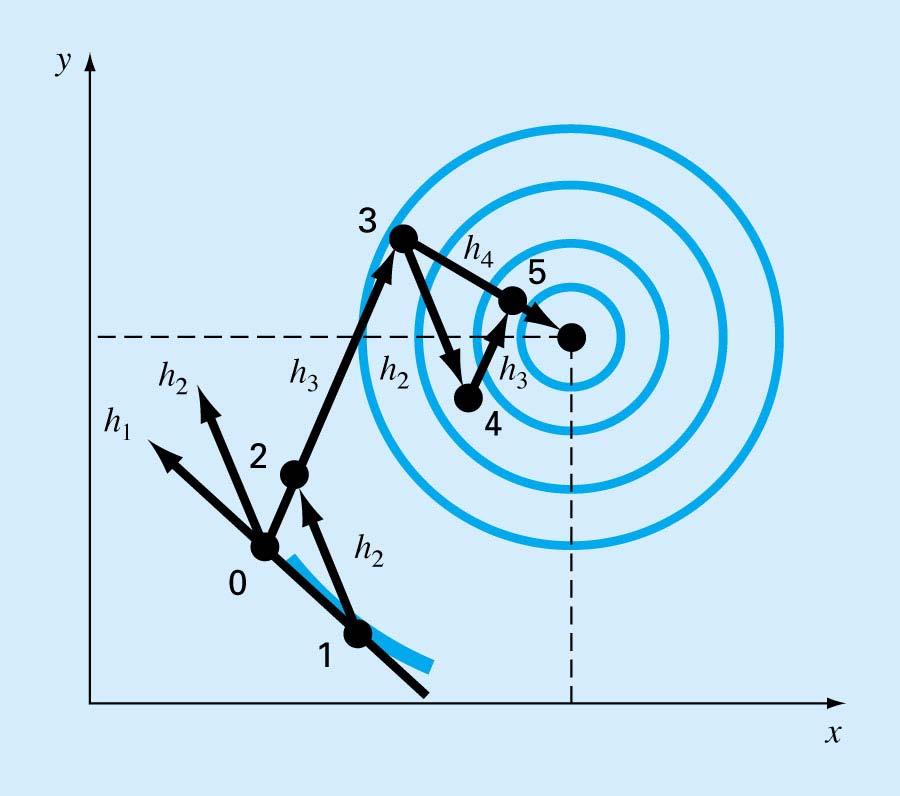
14 Start with a point x 0 and two random directions h 1 and h 2 Search in the direction of h 1 from x 0 to find a new point x 1 Search in the direction of h 2 from x 1 to find a new point x 2. Let h 3 be the direction joining x 0 to x 2 Search in the direction of h 3 from x 2 to find a new point x 3 Search in the direction of h 2 from x 3 to find a new point x 4 Search in the direction of h 3 from x 4 to find a new point x 5
15 Points x 3 and x 5 have been found by searching in the direction of h 3 from two starting points x 2 and x 4 Call the direction joining x 3 and x 5 h 4 Search in the direction of h 4 from x 5 to find a new point x 6 The new point x 6 will be exactly the optimum if f() is quadratic The iterations can then be repeated Errors estimated by change in x or in f()
16
17 Nelder-Mead Simplex Algorithm Direct search method that uses simplices, which are triangles in dimension 2, pyramids in dimension 3, etc. At each iteration a new point is added usually in the direction of the face of the simplex with largest function values
18
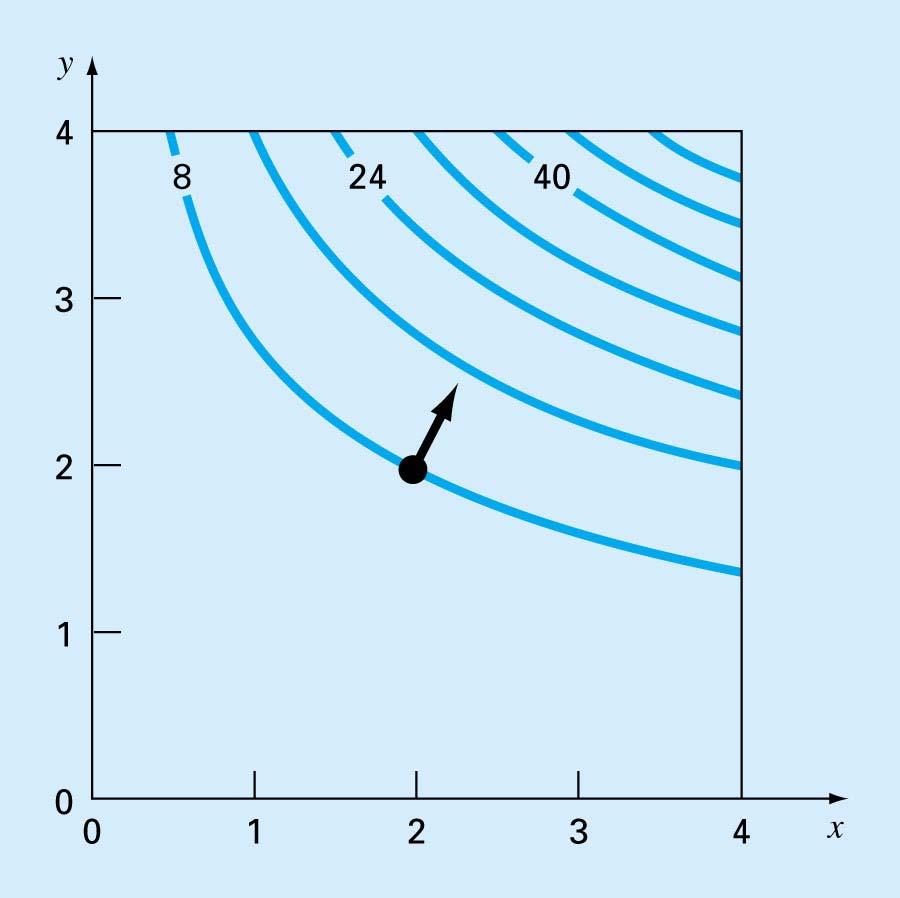
19 Gradient Methods The gradient of f() at a point x is the vector of partial derivatives of the function f() at x For smooth functions, the gradient is zero at an optimum, but may also be zero at a non-optimum The gradient points uphill The gradient is orthogonal to the contour lines of a function at a point
20 Directional Derivatives Given a point x in R n, a unit direction v, and a function f() of n variables, we can define a new function g() of one variable by g(λ)=f(x+λv) The derivative g (λ) is the directional derivative of f() at x in the direction of v This is greatest when v is in the gradient direction
21 x v ( x, x,, x ) 1 2 ( v, v,, v ) T 1 vv 1 2 i 1 2 i f( x) f( x, x,, x ) 1 2 f f f f,,, x x x 1 2 gλ( ) f ( x λ v) n v n n n T f f f g'(0) ( f) v v, v,, vn x x x n n
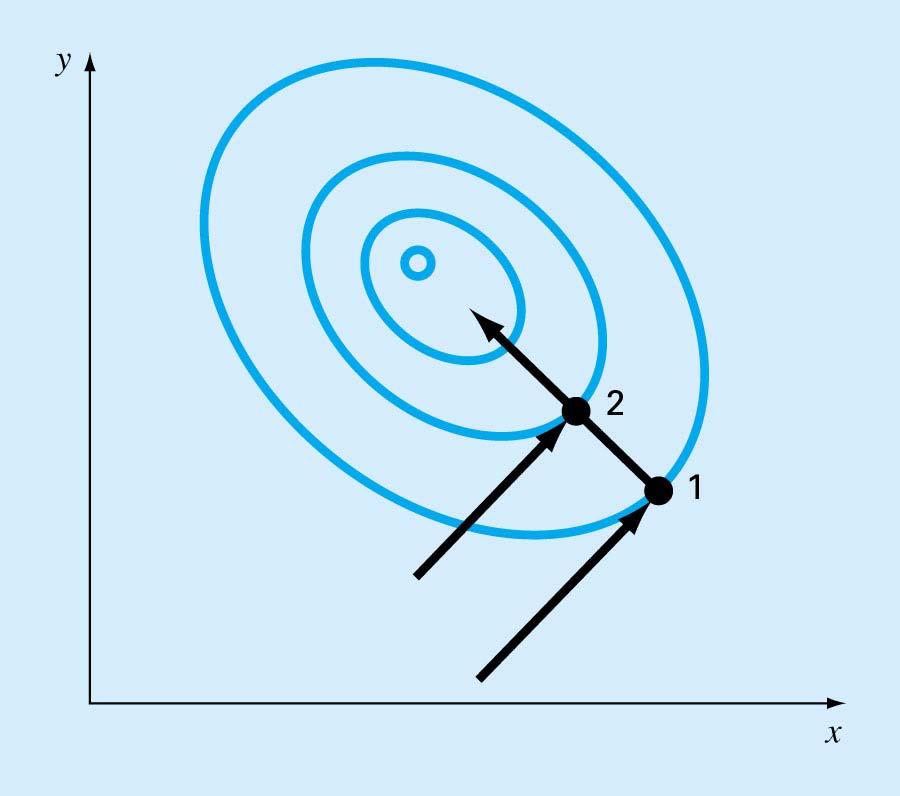
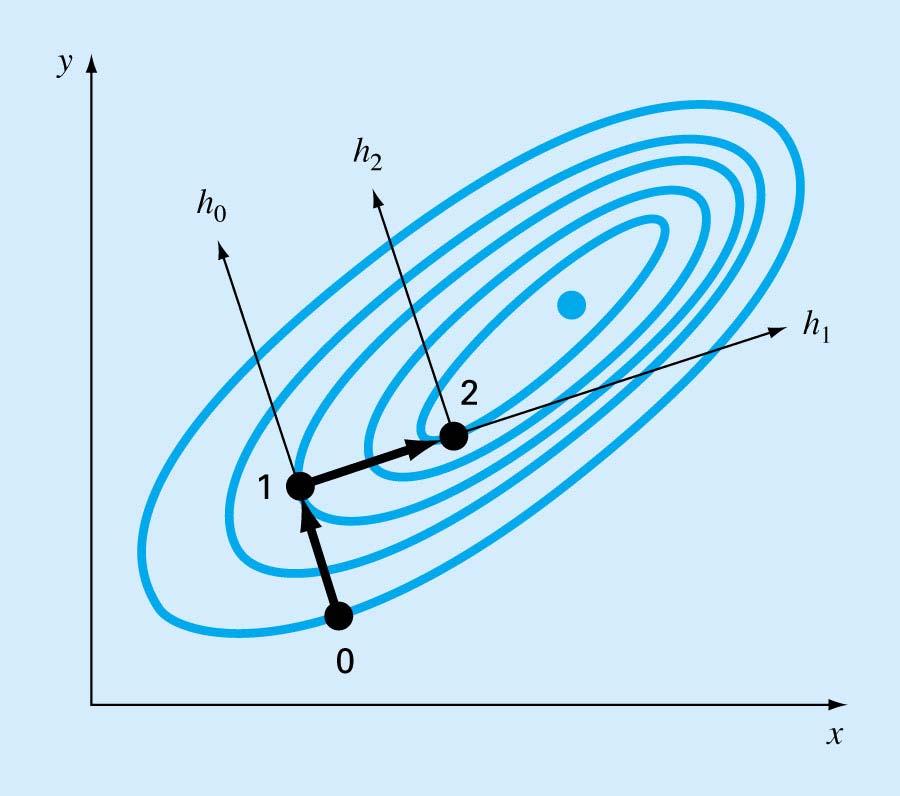
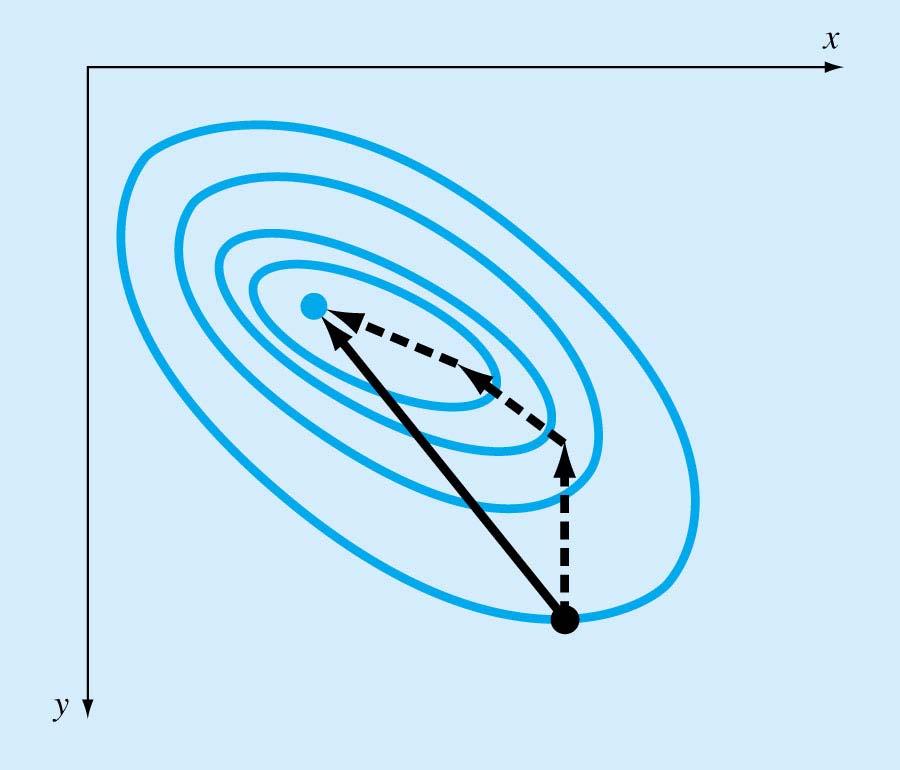
22 Steepest Ascent The gradient direction is the direction of steepest ascent, but not necessarily the direction leading directly to the summit We can search along the direction of steepest ascent until a maximum is reached Then we can search again from a new steepest ascent direction
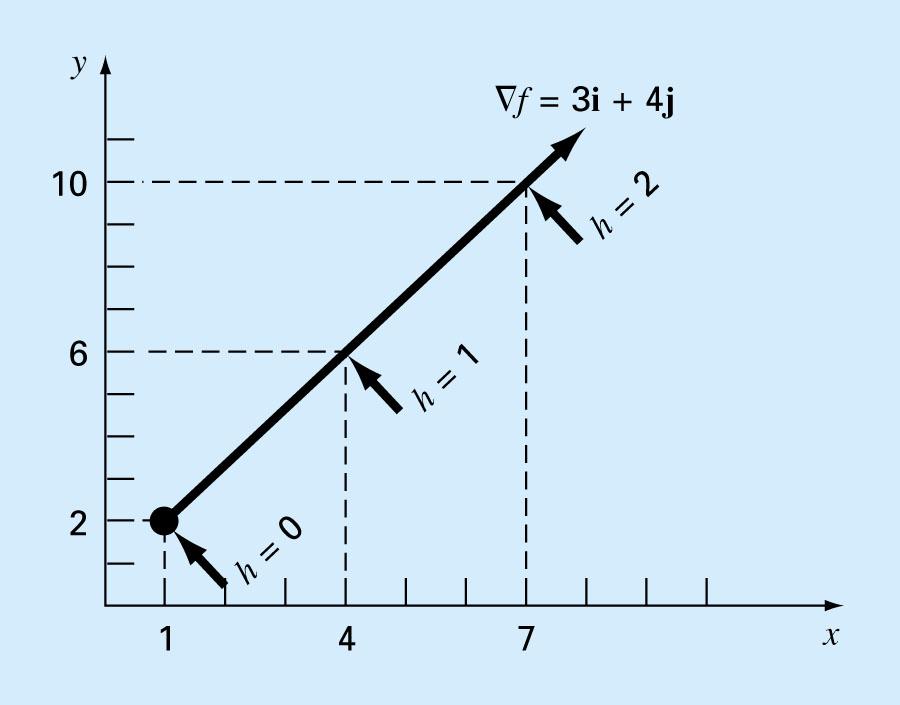
23 xx f( x, x) at (2,2) f (2,2) f ( x, x ) x f (2,2) 4 f ( x, x) 2 xx f (2,2) f (2,2) (4,8) (2 4 λ,2 8 λ) is the gradient line gλ( ) f (2 4 λ,2 8 λ ) (2 4 λ )(2 8 λ ) 2
24
25
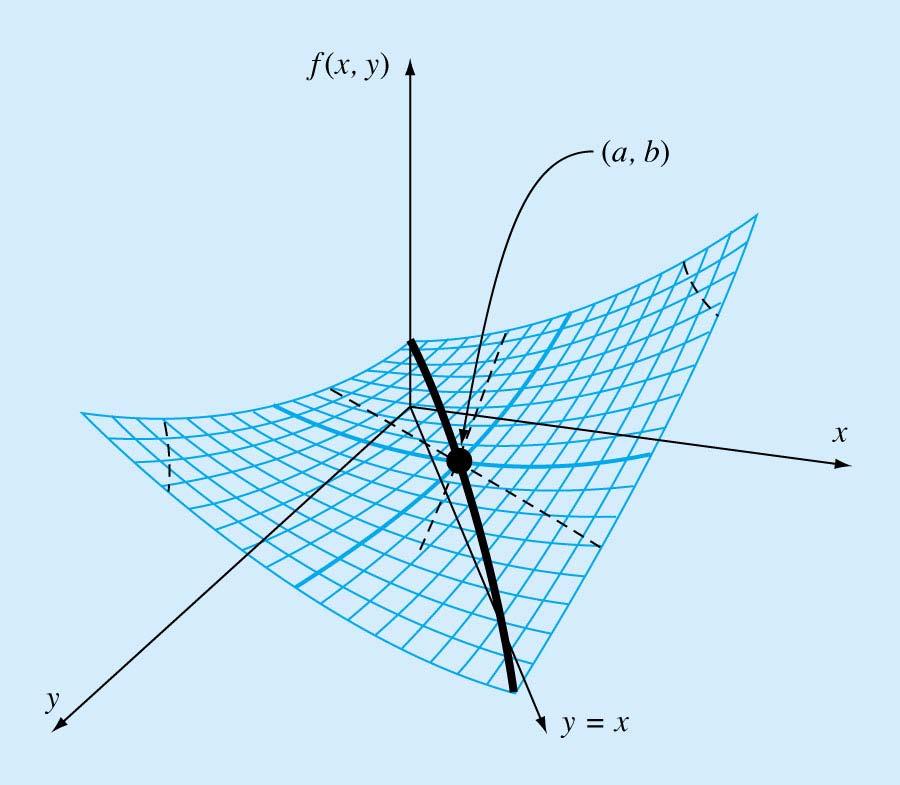
26 The Hessian The Hessian of a function f() is the matrix of second partial derivatives The gradient is always 0 at a maximum (for smooth functions) The gradient is also 0 at a minimum The gradient is also 0 at a saddle point, which is neither a maximum nor a minimum A saddle point is a max in at least one direction and a min in at least one direction
27
28 Max, Min, and Saddle Point For one-variable functions, the second derivative is negative at a maximum and positive at a minimum For functions of more than one variable, a zero of the gradient is a max if the second directional derivative is negative for every direction and is a min if the second directional derivative is positive for every direction
29 Positive Definiteness A matrix H is positive definite if x T Hx > 0 for every vector x Equivalently, every eigenvalue of H is positive λ is an eigenvalue of H with eigenvector x if Hx = λx -H is positive definite if every eigenvalue of H is negative
30 Max, Min, and Saddle Point If the gradient f of a function f is zero at a point x and the Hessian H is positive definite at that point, then x is a local min If f is zero at a point x and -H is positive definite at that point, then x is a local max If f is zero at a point x and neither H nor -H is positive definite at that point, then x is a saddle point The determinant H helps only in dimension 1 or 2
31 Steepest Ascent/Descent This is the simplest of the gradient-based methods From the current guess, compute the gradient Search along the gradient direction until a local max is reached of this onedimensional function Repeat until convergence
32
33 Eigenvalues Suppose the gradient is 0 and H is the Hessian H is positive definite if and only if all the eigenvalues of H are positive (minimum). -H is positive definite if and only if all the eigenvalues of H are negative (maximum). If the eigenvalues of H are not all of the same sign then we have a saddle point.
34 Practical Steepest Ascent In real examples, the maximum in the gradient direction cannot be calculated analytically Problem reduces to one dimensional optimization as a line search One can also use more primitive line searches that are fast but do not try to find the absolute optimum
35 Newton s Method Steepest ascent can be quite slow Newton s method is faster, though it requires evaluation of the Hessian Function is modeled by a quadratic at a point using first and second derivatives The quadratic is solved exactly This is used as the next iterate
36 A second-order multivariate Taylor series expansion at the current iterate is T T f( x) = f( x ) + f ( x )( x x ) + 0.5( x x ) H ( x x ) i i i i i i At the optimum, the gradient is 0, so f( x) = f( x ) + H ( x x ) = 0 i i i If H is invertible,then 1 x = i+ 1 x i H i f( xi) In practice, solve the linear problem, H x= H x f( x ) i i i i
37
38 Curve Fitting Given a set of n points (x i, y i ), find a fitted curve that provides a fitted value y = f(x) for each value of x in a range. The curve may interpolate the points (go through each one), either linearly or nonlinearly, or may approximate the points without going through each one, as in least-squares regression.
39
40
41 Simple Linear Regression We have a set of n data points, each of which has a measured predictor x and a measured response y. We wish to develop a prediction function f(x) for y. In the simplest case, we take f(x) to be a linear function of x, as in f(x) = a 0 + a 1 x
42 Criteria and Estimation If we have one point, way (1,1), then many lines fit perfectly: f(x) = x, f(x) = 2x-1 f(x) = -x+2 If there are two points, say (1,1) and (2,3), then in general there is exactly one line going through the points: f(x) = 2x-1.
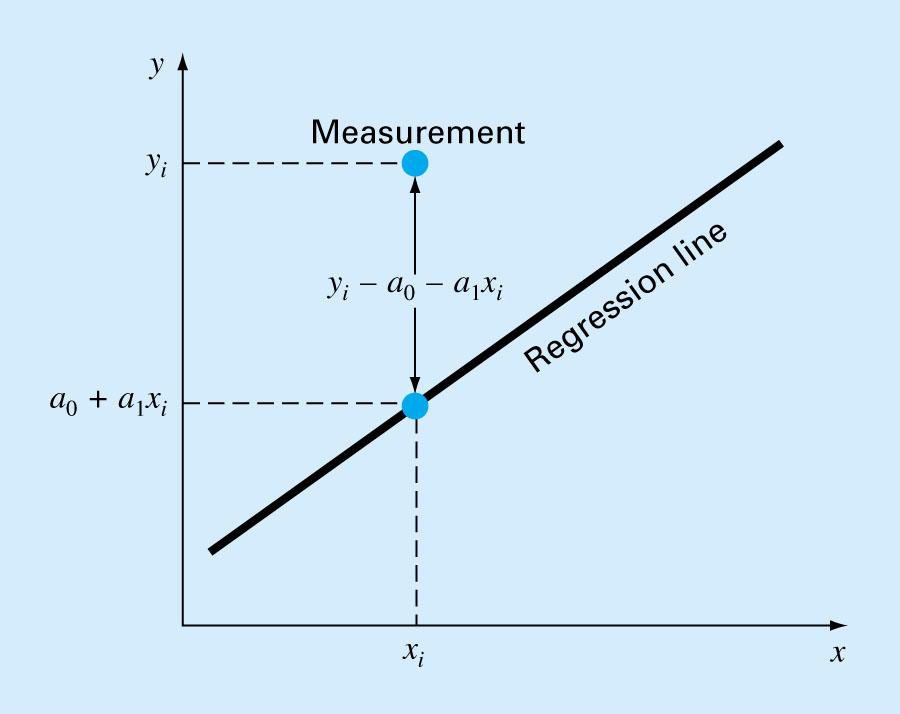
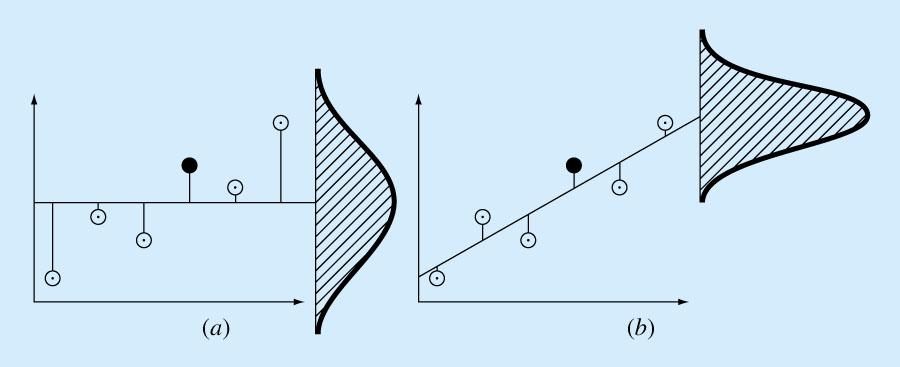
43 If there are more than two points, then in general there is no straight line through all of them. These problems are, respectively, underdetermined, determined, and overdetermined. Reasonable criteria for choosing the coefficients a and b in f(x) = a 0 + a 1 x lie in minimizing the size of the residuals: r i = y i f(x i ) = y i (a 0 + a 1 x i ), but how to combine different residuals?
44
45 The least-squares criterion minimizes n n 2 i i i i= 1 i= 1 = = ( ( )) 2 SS r y f x There are many other possible criteria. Use of the least-squares criterion does not imply any beliefs about the data Use of the linear form for f(x) assumes that this straight-line relationship is reasonable Assumptions are needed for inference about the predictions or about the relationship itself

46 Mininimize Sum of Residuals Minimize Sum of Absolute Values of Residuals Minimize Max Residual
47 Computing the Least-Squares Solution We wish to minimize the sum of squares of deviations from the regression line by choosing the coefficients a 0 and a 1 accordingly Since this is a continuous, quadratic function of the coefficients, one can simply set the partial derivatives equal to zero
48 n n n 2 ( ( )) = i = i i = ( i 0 1 i) i= 1 i= 1 i= 1 SS( a, a ) r y f x y a a x SS( a, a ) n n n n 0 1 0= = 2 ( yi a0 ax 1 i) = 2 yi a0 ax 1 i a 0 i= 1 i= 1 i= 1 i= 1 SS( a, a ) n n n n = = 2 ( yi a0 ax 1 i) xi = 2 xy i i ax 0 i ax 1 i a 1 i= 1 i= 1 i= 1 i= 1 na + a x 0 1 n i= 1 i = i= 1 n n n 2 0 i 1 i = i i i= 1 i= 1 i= 1 a x a x xy n y i
49 These normal equations have a unique solution as two equations in two unknowns The straight line that is calculated in this way is used in practice to see if there is a relationship between x and y It is also used to predict y from x It can also be used to predict x from y by inverting the equation We now look at some practical uses of least squares
50 Quantitative Prediction Regression analysis is the statistical name for the prediction of one quantitative variable (fasting blood glucose level) from another (body mass index) Items of interest include whether there is in fact a relationship and what the expected change is in one variable when the other changes
51 Assumptions Inference about whether there is a real relationship or not is dependent on a number of assumptions, many of which can be checked When these assumptions are substantially incorrect, alterations in method can rescue the analysis No assumption is ever exactly correct
52 Linearity This is the most important assumption If x is the predictor, and y is the response, then we assume that the average response for a given value of x is a linear function of x E(y) = a + bx y = a + bx + ε ε is the error or variability
53
54
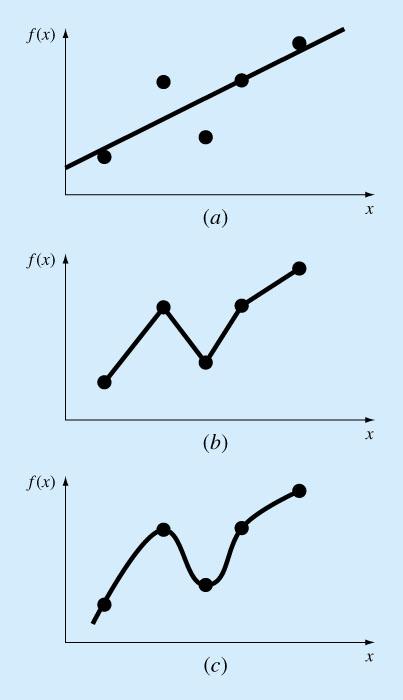
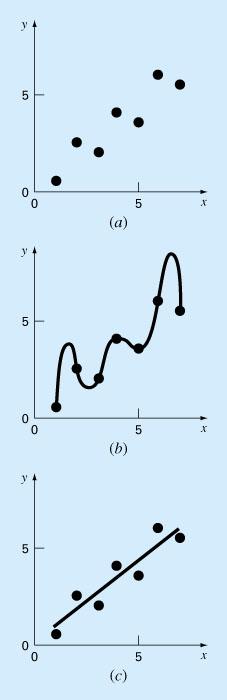
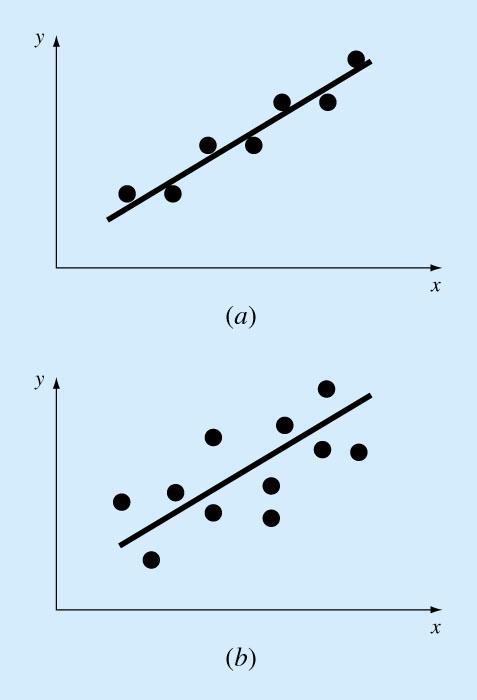
55 In general, it is important to get the model right, and the most important of these issues is that the mean function looks like it is specified If a linear function does not fit, various types of curves can be used, but what is used should fit the data Otherwise predictions are biased
56 Independence It is assumed that different observations are statistically independent If this is not the case inference and prediction can be completely wrong There may appear to be a relationship even though there is not Randomization and control prevents this in general
57
58
59 Note no relationship between x and y These data were generated as follows: x y x y 0.95x i 1 i i 0.95y ε η i 1 i i
60 Constant Variance Constant variance, or homoscedacticity, means that the variability is the same in all parts of the prediction function If this is not the case, the predictions may be on the average correct, but the uncertainties associated with the predictions will be wrong Heteroscedacticity is non-constant variance
61
62
63 Consequences of Heteroscedacticity Predictions may be unbiased (correct on the average) Prediction uncertainties are not correct; too small sometimes, too large others Inferences are incorrect (is there any relationship or is it random)
64 Normality of Errors Mostly this is not particularly important Very large outliers can be problematic Graphing data often helps If in a gene expression array experiment, we do 40,000 regressions, graphical analysis is not possible Significant relationships should be examined in detail
65
66 Example Analysis Standard aqueous solutions of fluorescein (in pg/ml) are examined in a fluorescence spectrometer and the intensity (arbitrary units) is recorded What is the relationship of intensity to concentration? Use later to infer concentration of labeled analyte
67 concen~n intens~y
68 intensity concentration
69 . regress intensity concentration Source SS df MS Number of obs = F( 1, 5) = Model Prob > F = Residual R-squared = Adj R-squared = Total Root MSE = intensity Coef. Std. Err. t P> t [95% Conf. Interval] concentrat~n _cons
70 . regress intensity concentration Source SS df MS Number of obs = F( 1, 5) = Model Prob > F = Residual R-squared = Adj R-squared = Total Root MSE = intensity Coef. Std. Err. t P> t [95% Conf. Interval] concentrat~n _cons Slope
71 . regress intensity concentration Source SS df MS Number of obs = F( 1, 5) = Model Prob > F = Residual R-squared = Adj R-squared = Total Root MSE = intensity Coef. Std. Err. t P> t [95% Conf. Interval] concentrat~n _cons Intercept = intensity at zero concentration
72 . regress intensity concentration Source SS df MS Number of obs = F( 1, 5) = Model Prob ANOVA > F = Residual R-squared = Adj Table R-squared = Total Root MSE = intensity Coef. Std. Err. t P> t [95% Conf. Interval] concentrat~n _cons
73 . regress intensity concentration Source SS df MS Number of obs = F( 1, 5) = Model Prob > F = Residual R-squared = Adj R-squared = Total Root MSE = intensity Coef. Std. Err. t P> t [95% Conf. Interval] concentrat~n Test of overall model _cons
74 . regress intensity concentration Source SS df MS Number of obs = F( 1, 5) = Model Prob > F = Residual R-squared = Adj R-squared = Total Root MSE = intensity Coef. Std. Err. t P> t [95% Conf. Interval] concentrat~n Variability around the regression line _cons
75 concentration intensity Fitted values
76 Residuals Fitted values
77 Use of the calibration curve yˆ x yˆ is the predicted average intensity x is the true concentration y 1.52 xˆ 1.93 y is the observed intensity xˆ is the estimated concentration
78
79 Measurement and Calibration Essentially all things we measure are indirect The thing we wish to measure produces an observed transduced value that is related to the quantity of interest but is not itself directly the quantity of interest Calibration takes known quantities, observes the transduced values, and uses the inferred relationship to quantitate unknowns
80 Measurement Examples Weight is observed via deflection of a spring (calibrated) Concentration of an analyte in mass spec is observed through the electrical current integrated over a peak (possibly calibrated) Gene expression is observed via fluorescence of a spot to which the analyte has bound (usually not calibrated)
81 Measuring Variation If we do not use any predictor, the variability of y is its variance, or mean square difference between y and the mean of all the y s. If we use a predictor, then the variability is the mean square difference between y and its prediction
82
83
84 n 1 2 MST = n 1 y y ( ) ( ) i= 1 ( ) ( ) ( ) i 0 1 i ( ) ( ) ( ) n 1 2 MSE = n 2 y yˆ 1 i= 1 n = n 2 y a ax i= 1 MSR = SST SSE i i /1 i 2
85 concentration intensity Fitted values
86 Source SS df MS Model Residual Total
87 Multiple Regression If we have more than one predictor, we can still fit the least-squares equations so long as we don t have more coefficients than data points This involves solving the normal equations as a matrix equation
88 y = xb + ε Y = XB + E n = number of data points p = number of predictors including constant y is 1 1 x is 1 p B is p 1 ε is 1 1 Y is n 1 X is n p E is n 1
89 Y = XB + E n = number of data points p = number of predictors including constant B is p 1 Y is n 1 X is n p E is n 1 ( Y XBˆ ) is n 1 ( Y XBˆ) ( Y XBˆ) is 1 1, the SSE
90 ( Y XBˆ) ( Y XBˆ) is 1 1, the SSE To minimize this over choices of B, solve ( XX ) Bˆ = ( XY ) ˆ 1 = ( ) ( ) B XX XY
91 Linearization of Nonlinear Relationships We can fit a curved relationship with a polynomial The relationship f(x) = a 0 + a 1 x + a 2 x 2 can be treated as a problem with two predictors This can then be dealt with as any multiple regression problem
92 Sometimes a nonlinear relationship can be linearized by a transformation of the response and the predictor Often this involves logarithms, but there are many possibilities
93 y ln y y = αe β x = lnα + βx d a = a+ 1 + / d a = 1 + / y a d y b = ( x/ c) y a ( x c) ( x c) d y ln = bln c+ bln x y a b b
94
95 Intrinsic nonlinearity We can still solve the least-squares problem even if f(x) is not linear in the parameters We do this by approximate linearization at each step = Gauss-Newton There are other, more effective methods, but this is beyond our scope
96 y = f( x; a, a, a ) + ε i i 0 1 n ( a x ) 1, j 1, j ( ax) 1 ( ) ( ) 0( j) + 0( j) 0 0, j + 1( ( ) j) a1 a1, j ( ) y = f( x; a, a, a ) + f ( x; a, a, a ) a a + i i 0, j 1, j n, j 0 i 0, j 1, j n, j 0 0, j 0 + f ( x; a, a, a ) a a + ε 1 j 0, j j n i 0, j 1, j n, j n n, j y = f( x) + ε = a 1 e + ε f ( x ) = 1 e j f( x) = a xe 0 a y f x f x a a f x y f ( x ) f ( x ) a + f ( x ) a j x j 0 j 0 j 0 1 j 1 Solve for a and a by linear least squares. 0 1 Repeat until convergence.
97 Interpolation Given a set of points (x i, y i ), an interpolating function is one which is defined for all x in the range of the x i, and which satisfies f(x i ) = y i. Polynomials are a convenient class of functions to use for this purpose, though others such as splines are also used. There are different ways to express the same polynomial. Given n points, we can in general determine an n-1 degree polynomial that interpolates them.

98 Linear function Two points Degree one Quadratic function Three points Degree Two Cubic function Four points Degree three
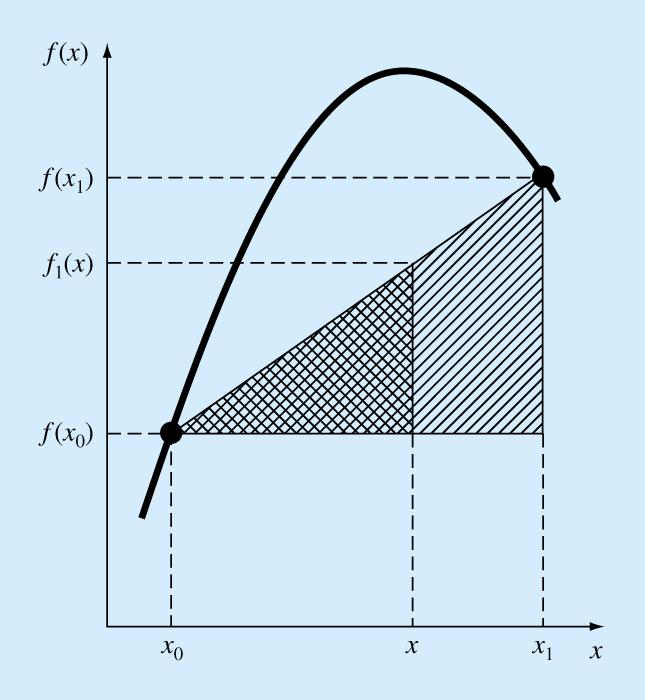
99 Linear Interpolation
100 f x f x f x f x = x x x x ( ) ( ) ( ) ( ) ( ) ( ) f x f x f x = f x + x x ( ) ( ) 1 0 ( ) x1 x0 ln(1) = 0 ln(4) = ln( x) f1( x) = 0 + ( x 1) ln(2) f1(2) = (2 1) = ln(2) =
101
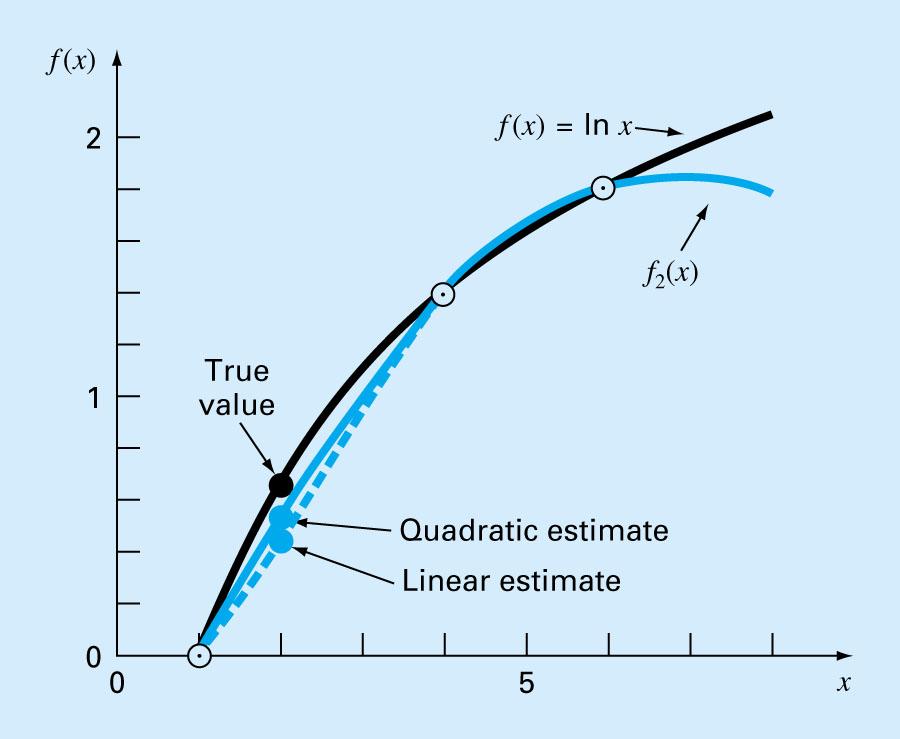
102 Quadratic Interpolation Three points determine a quadratic This should fit many functions better than linear interpolation We derive a general form for quadratic interpolation We then derive a method to estimate the three unknowns (coefficients) that determine a quadratic function
103
104 f ( x) = b + b( x x ) + b ( x x )( x x ) = b + bx bx + bx + bxx bxx bxx which is of the form = a + ax+ ax with a = b bx + bx x a = b bx bx a = b which shows either form is general
105 f ( x) = b + b( x x ) + b ( x x )( x x ) f( x ) b b f( x ) f( x ) = b + b( x x ) f( x ) = f( x ) + b( x x ) b = = = f( x1) f( x0) ( x x ) 1 0
106 f ( x) = b + b( x x ) + b ( x x )( x x ) b b f( x ) f( x1) f( x0) ( x x ) 1 0 f( x ) f( x ) f( x ) = f( x ) + ( x x ) + b ( x x )( x x ) ( x1 x0) f( x2) f( x0) f( x1) f( x0) ( x2 x0) = + b ( x x )( x x ) ( x x ) ( x x )( x x ) b = = f( x ) f( x ) f( x ) f( x ) ( x x )( x x ) ( x x )( x x ) =
107 b b b b b b f( x2) f( x0) f( x1) f( x0) = ( x x )( x x ) ( x x )( x x ) f( x2) f( x1) f( x1) f( x0) f( x1) f( x0) = + ( x x )( x x ) ( x x )( x x ) ( x x )( x x ) = + [ f( x ) f( x )][( x x ) ( x x )] f( x ) f( x ) ( x2 x0)( x2 x1) ( x2 x0)( x2 x 1 )( x 1 x 0 ) f( x2) f( x1) f( x1) f( x0) = ( x x )( x x ) ( x x )( x x ) = = f( x2) f( x1) f( x1) f( x0) ( x2 x1) ( x1 x0) ( x x ) 2 0 f( x2) f( x1) f( x1) f( x0) ( x2 x1) ( x1 x0) ( x x )
108 f ( x) = b + b( x x ) + b ( x x )( x x ) b b f( x ) f( x1) f( x0) ( x x ) 1 0 looks like a finite first divided difference b = = = f( x2) f( x1) f( x1) f( x0) ( x2 x1) ( x1 x0) ( x x ) 2 0 looks like a finite second divided difference
109 Approximate ln(2) = by interpolating (1, 0) (4, ) (6, ) b b b = f( x ) = 0 = f( x1) f( x0) = = ( x x ) ( 2) f( x1) f( x1) f( x0) x2 x1 x1 x0 f x ( ) ( ) = ( x x ) = f ( x) = b + b( x x ) + b ( x x )( x x ) f (2) = (2 0) (2 0)(2 4) = =
110 General Form of Newton s Divided Difference Interpolating Polynomials The order n polynomial interpolates n+1 points The coefficients are finite divided differences They can be calculated recursively
111 f ( x) = b + b( x x ) + b( x x )( x x ) + + b ( x x )( x x ) ( x x ) b b n n 0 1 n = f( x ) 0 0 = f[ x, x ] b = f[ x, x, x ] b = f[ x, x,, x, x ] n n n f[ x, x,, x, x ] = i i f[ xi, xi 1,, x2, x1] f[ xi 1, xi 2,, x1, x0] x x i 0
112
113 xi f(xi) 1st dd 2nd dd 3rd dd 4th dd
114 Lagrange Interpolating Polynomial Given n+1 points and function values, there is only one degree-n polynomial going through the points The Lagrange formulation is thus equivalent, leading to the same interpolating polynomial It is easier to calculate
115 f ( x) = L( x) f( x ) n i i i= 0 L( x) i n n j= 0 i j j i This passes through each of the points because when x = x, all of the L( x) are 0 except for L k = k x x x ( x), which is equal to 1. x j i
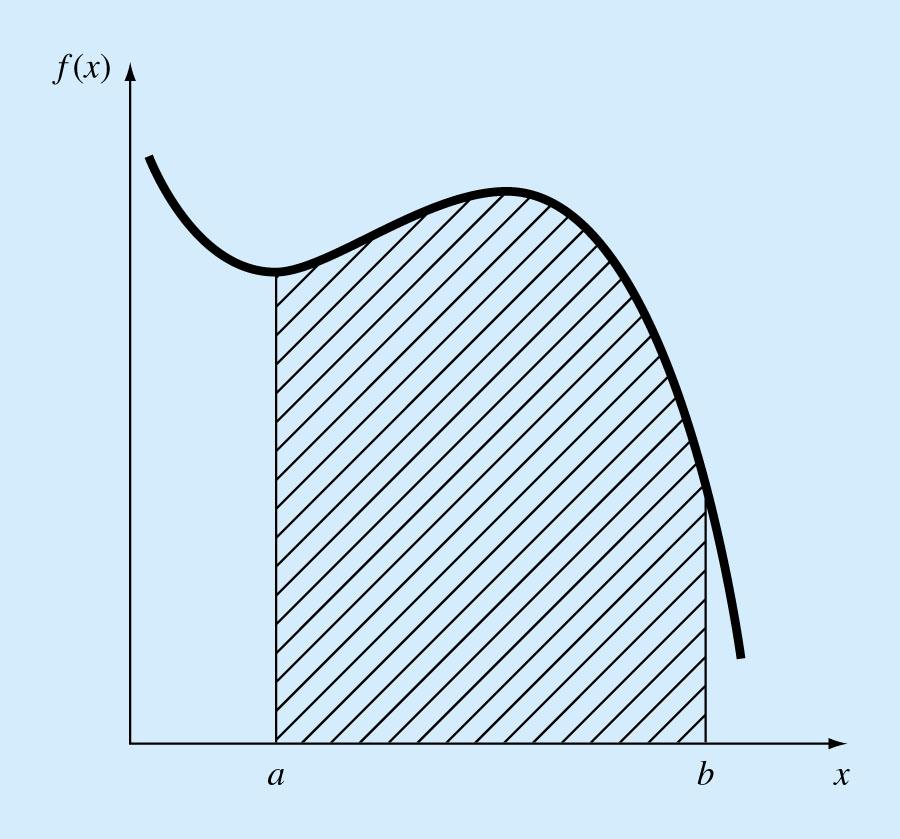
116 Numerical Integration Some functions of known form can be integrated analytically Others require numerical estimates because the form of the integrand yields no closed form solution Sometimes the function may not even be defined by an equation, but rather by a computer program
117 0 π x dx /2 π /2 4 2 x = = = sin( x) dx = cos( x) 1 0 = cos( π / 2) + cos(0) = 0+ 1= e x 2 dx =?
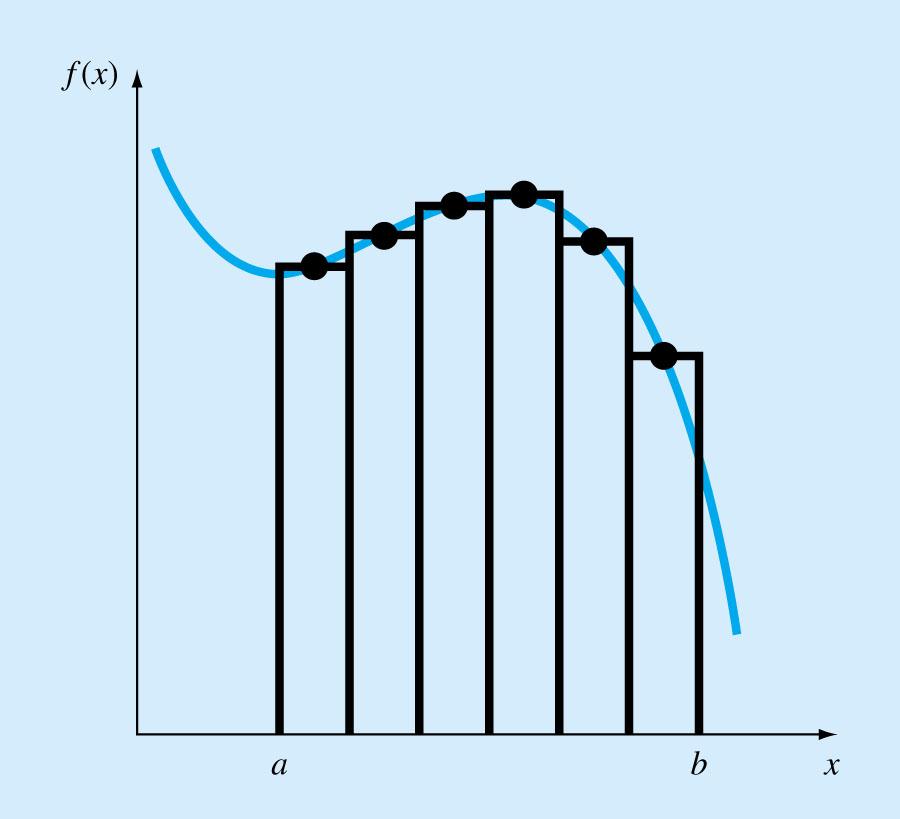
118 Left and right Riemann sums, and the midpoint rule give definition, not a good computational method. Exact only for constant functions (LR and RR) or linear functions (MR). The Definite Integral b a b a b a n 1 b a f ( x) dx = lim f ( a + i[ b a]/ n) n i = 0 n n b a f ( x) dx = lim f ( a + i[ b a]/ n) n i = 1 n n 1 b a f( x) dx = lim f( a+ i[ b a]/ n+ [ b a]/ 2 n) n i = 0 n
119
120
121
122 Example f(x) = exp(-x 2 ) Use left Riemann sum Integrate from 0 to 2 Exact value is N Sum
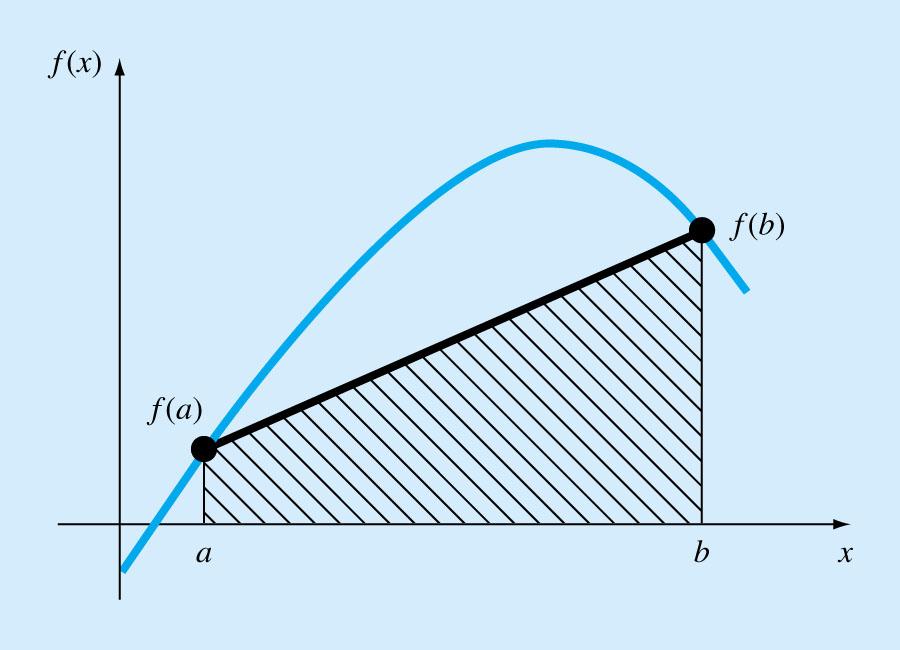
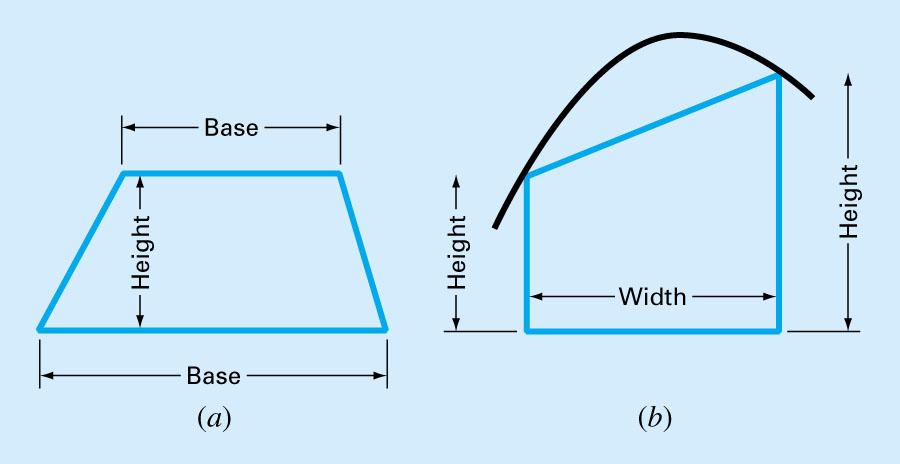
123 Trapezoidal Rule Simple Riemann sum approximates the function over each interval by a constant function We can use linear, quadratic, etc. instead for more accuracy Using a linear approximation over each interval results in the trapezoidal rule

124 Linear and Quadratic Approximations
125 Linear Approximations over Short Intervals

126 Closed and Open Rules
127 Trapezoidal Rule for an Interval b a ( a, f( a)) ( b, f( b)) f( b) f( a) f1( x) = f( a) + ( x a) b a f( b) f( a) f1( x) dx = f ( a) x + ( x a) 2( b a) f( b) f( a) 2 = f( a) b+ ( b a) f( a) a 2( b a) f( b) f( a) = f( a)( b a) + ( b a) 2 f( b) + f( a) = ( b a) 2 2 b a
128
129
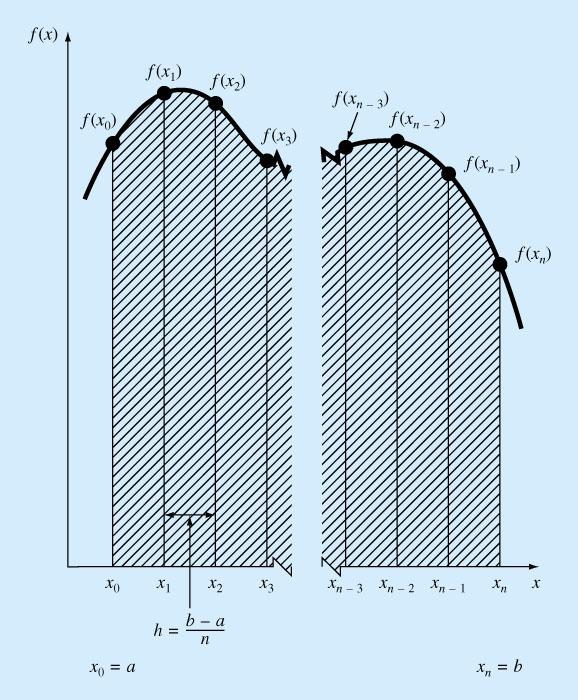
130 Trapezoidal Rule for a Subdivided Interval Divide the interval [a, b] into n equal segments, each of width (b-a)/n Apply the trapezoidal rule to each segment Add up all the results This is much more accurate than the simple Riemann sum
131 h = ( b a)/ n x = a + ih i = 0,1, 2,, n f i i = f( x ) i 0.5 h( f + f ) h( f + f ) h( f + f ) h( f + f ) n 2 n 1 n 1 n n 1 0 i n i= 1 0 i n i= 1 2n = 0.5h f + 2 f + f = nh n 1 f + 2 f + f = 2n = n 1 f + 2 f + f 0 i n i 1 ( b a) = (width)(average he ight)
132
133
134
135 Example f(x) = exp(-x 2 ) Use trapezoidal rule Integrate from 0 to 2 Exact value is N Sum
136

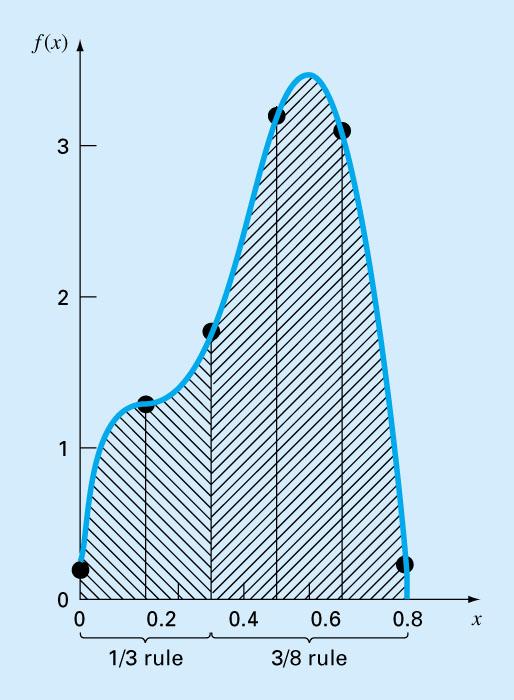
137 Simpson s Rules
138 Simpson s Rules Simpson s rules generalize the trapezoidal rule to use more than two points per interval, so we can use quadratic or cubic models instead of linear We will mainly cover the quadratic model, or Simpson s 1/3 rule
139 Quadratic Interpolation For a single interval, we will derive Simpson s 1/3 rule We will need to find the quadratic equation that goes through three points (x 1, f(x 1 )), (x 2, f(x 2 )), (x 3, f(x 3 )) We will then integrate the quadratic to obtain the estimate of the integral This also integrates cubics exactly
140 f = f( x ) f = f( x ) f = f( x ) h= x2 x1 = x1 x0 ( x x )( x x ) ( x x )( x x ) ( x x )( x x ) f( x) = f + f + f ( x x )( x x ) ( x x )( x x ) ( x x )( x x ) h f x x x x x f x x x x f x x x x f x 2 1 2h f( x) dx= ( )( 2 ) ( 2 ) 1 ( ) y h y h f y y h f + y y h f dy x h 0 h f0 + 4 f1+ f2 = ( f f 1+ f 2) = 2 h = width/average height ( ) = ( 1)( 2) 0 2( 0)( 2) 1+ ( 0)( 1) 2 2h 0 2h 0 2h y( y h) dy = y hy = h 2h = h h ( y h)( y 2 h) dy = y hy + 2h y = h 6h + 4h = h h 2 yy ( 0 2h h) dy = y + 2hy = h + 8h = h
141 Simpson s 1/3 Rule for a Subdivided Interval Divide the interval [a, b] into n equal segments, each of width (b-a)/n Apply the Simpson s 1/3 rule to each pair of segments Add up all the results This is more accurate than the trapezoidal rule
142 h f 4 f f f 4 f f f 4 f f f 4 f f 3 h f 0 4 f 1 2 f 2 4 f 3 2 f 4 2 f n 4 4 f n 3 2 f n 2 4 f n 1 f n 3 n 2 m is even n 4 n 3 n 2 n 2 n 1 n
143 Example f(x) = exp(-x 2 ) Use Simpson s rule Integrate from 0 to 2 Exact value is N Sum
144 Simpson s 3/8 Rule Uses four points to fit a cubic polynomial Is not theoretically more accurate than the 1/3 rule, but can use an odd number of segments We can combine this with Simpson s 1/3 rule if the number of segments is odd With 15 intervals (16 points), this is 6 Simpson s 1/3 rule plus 1 of Simpson s 3/8 rule
145 3h = [ f ] f 1+ 3 f 2 + f 3 8 f + 3f + 3f + f = ( b a) 8 = (width)(average height)
146
147
148 Theoretical Errors of Newton-Cotes Methods Left and right Riemann integral formulas have errors of O(h). In the case of a linear function, y = c+dx for example, integrated over the interval [a, b], each approximating rectangle is missing a triangular portion whose base is h and whose height is dh, and there are n such triangles (h is the length of the interval divided by n), so the total error is ndh 2 /2 = d(b-a)h/2, which is proportional to h
149 Improving Left and Right Riemann Sums We can eliminate these triangles in two ways We can use a central Riemann sum that uses points in the middle of the intervals (open rule). This fits straight lines exactly We can use the trapezoidal rule, which also fits straight lines exactly Both these have O(h 2 ) errors
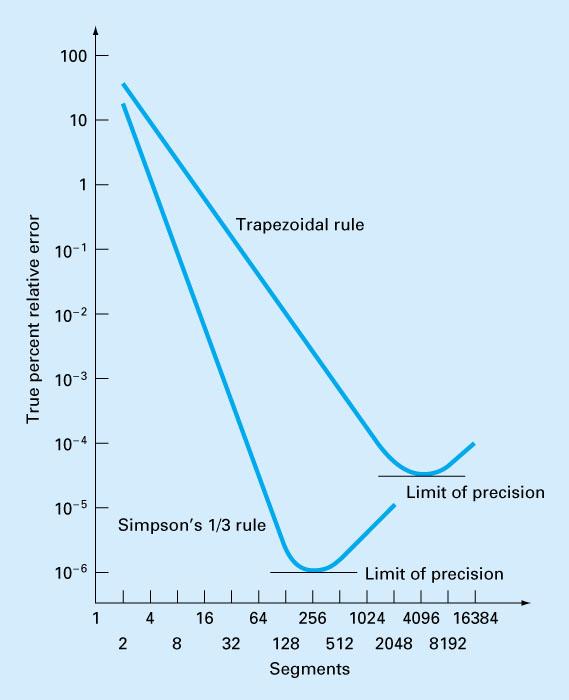
150 Error in Simpson s Rule The error in Simpson s 1/3 rule is is O(h 4 ) Compare this to left and right Riemann sums with errors at O(h) and the central Riemann sum and trapezoidal rule with errors at O(h 2 ) This means that in general Simpson s rule is more accurate at a given value of n It also gives information about changes of errors with n
151 Absolute Errors of Three Integration Methods f(x) = exp(-x 2 ), Integrate from 0 to 2, Exact value is N R L Trap Simp
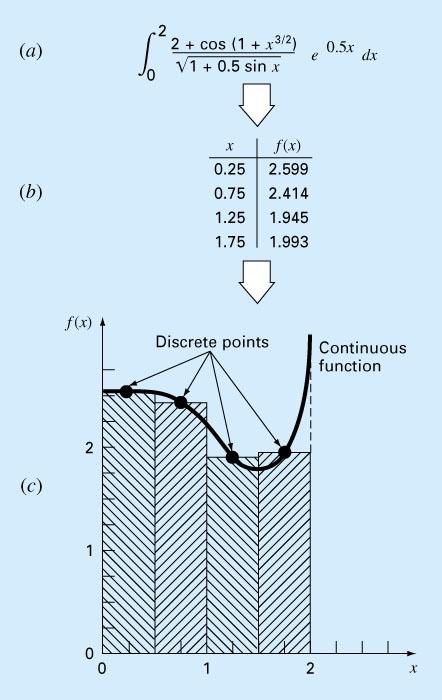
152 Is the function available? The Newton-Cotes rules we have been looking at need a vector of function values The programs seen previously do not explicitly call a function; rather use a provided grid of values These methods can also be used in the form where a function is called In the case that any value can be called, other methods are available
153
154 Fixed Interval vs. Functional Integration The Newton-Cotes methods we have been describing all begin with a set of equally spaced function values. Sometimes this is all that is available, but we may be able to do better with some variation in the x s.
155 Richardson Extrapolation Given two estimates of an integral with known error properties, it is possible to derive a third estimate that is more accurate We will illustrate this with the trapezoidal rule, though the idea applies to any integration method with an error estimate
156 b f ( x ) dx = I = I ( h ) + E ( h ) a For the subdivided interval trapezoidal rule b a Eh = Oh = h f ξ 12 I= Ih ( ) + Eh ( ) = Ih ( ) + Eh ( ) 2 2 ( ) ( ) ''( ) for some in [a, b] Eh ( ) h f''( ξ ) h Eh ( ) h f''( ) h = ξ2 2 h Eh ( ) ( ) Eh 2 2 h2 h Ih ( 1) + h Eh ( ) Eh ( ) Ih ( ) + Eh ( ) h1 / h Ih ( ) Ih ( ) Ih ( ) Ih ( ) I= Ih + Eh = Ih + Oh ( 2) ( 2) ( 2) which has error ( ) 2 2 h1 / h2 1 ξ
157 For the special case where h = h / 2 I= Ih ( ) + Eh ( ) = Ih ( ) Ih ( ) Ih ( ) h1 / h2 1 Ih ( 2) Ih ( 1) Ih ( 2) Ih ( 1) = Ih ( 2) + = Ih ( 2) = Ih ( 2) Ih ( 1) e x 2 dx = I(0.2) = (n=10) I(0.1) = (n=20) 4 1 I(0.1) I(0.2) = comparable to Simpson's rule with n = 20
158 Repeated Richardson Extrapolation With two separate O(h 2 ) estimates, we can combine them to make an O(h 4 ) estimate With two separate O(h 4 ) estimates, we can combine them to make an O(h 6 ) estimate, etc. The weights will be different for these repeated extrapolations
159 I, I, I I = I I / I = I I / I = I I / 20 /10 40 / / = I I + I
160 Errors for Richardson Extrapolation from Trapezoidal Rule Estimates n T R1 R
161 Romberg Integration Let I j,k represent an array of estimates of integrals k = 1 represents trapezoid rules O(h 2 ) k = 2 represents Richardson extrapolation from pairs of trapezoid rules O(h 4 ) k = 3 represents Richardson extrapolation from pairs of the previous step at O(h 6 ), etc.
162 If we double the number of points (halve the interval) at each step, then we only need to evaluate the function at the new points For example, if the first step uses four intervals, it would involve evaluation at five points, the second one would use eight intervals, evaluated at nine points, only four of which are new I 4 k 1 I I = j+ 1, k 1 jk, 1 jk, k 1 4 1
163
164 Romberg starting with 2 intervals = 3 points True value is , requires 17 function evaluations to achieve 7-digit accuracy. Simpson s rule requires 36 function evaluations, and the trapezoid rule requires 775!
165 Exact Integration The trapezoidal rule integrates a linear function exactly using two points Simpson s 1/3 rule integrates a quadratic (and cubics also) exactly using three points It is possible to take n+1 evenly spaced points and choose the weights so that the rule integrates polynomials for degree n exactly (e.g., Simpson s 3/8 rule)
166 Gaussian Integration Consider a function f() on a closed interval [a, b] We assume f() is continuous We wish to choose n points in [a, b] and weights, so that the weighted sum of the function values at the n points is optimal Can be chosen to integrate polynomials of degree 2n-1 exactly

167 Two interior points can integrate more exactly than two end points

168 Two integrals that should be integrated exactly by the trapezoid rule Method of undetermined coefficients
169 b f( a) + f( b) f ( x) dx ( b a) =c0f(a)+c1f(b) Trapezoid Rule a 2 f ( x) = 1 and f ( x) = x should be integrated exactly 0 1 b a 1dx = c 1+ c b- a = h = c + c b b a 0 1 xdx = c a + c b 0 1 a = ca 0 + cb 1 = ca 0 + ( b a c0) b = 2 ( ) b a b ab c0 a b = c 2 ( a b) 2 c0( a b) b a = = c 2 0 1
170 0 2 1 b a b a f ( x) dx =c f +c f +c f dx = b a = c + c + c b b a xdx = = c0a + c1( a + b)/2+ c2b a 2 b b a x dx c a c a b c b a 3 c = c = ( b a)/ = = 0 + 1( + ) /4+ 2 c = 4( b a) / 6 Simpson's rule
171 Gauss-Legendre Find n points in [-1, 1] and n weights so that the sum of the weighted function values at the chosen points integrates as high a degree polynomial as possible n points and n weights means 2n coefficients, which is the number in polynomials of degree 2n 1 We find the two-point Gauss-Legendre points and weights for [-1, 1]; other intervals follow by substitution
172 c x x f( x) dx c f( x ) + c f( x ) 1dx = 2= c + c xdx = 0 = c x + c x x dx = = c x + c x x dx = 0 = c x + c x = c = 1 = =
173 Gaussian Quadrature Gauss Legendre is highly accurate with a small number of points Suitable for continuous functions on closed intervals Gaussian quadrature also comes in other forms: Laguerre, Hermite, Chebychev, etc. for functions with infinite limits of integration, or which are not finite in the interval
174 With n points, Gauss-Laguerre integrates functions exactly that are multiples of w(x) = e -x by polynomials of degree 2n-1 exactly. w(x) is called the weight function. The weight function for Gauss-Legendre is w(x) = 1.
175 2 2 1/2 wx ( ) = (1 x) Chebyshev, first kind 2 1/2 wx ( ) = (1 x) Chebyshev, second kind x wx ( ) = e Laguerre α x wx ( ) = xe Generalized Laguerre x wx ( ) = e Hermite
176
177
178
179 Numerical Differentiation Previously we learned the forward, backward, and centered difference methods for numerical differentiation These use the first-order Taylor-series expansion These can be made more accurate by using higher order Taylor series expansions
180 First-Order Forward Difference f ''( x ) f x+ h = f x + f x h+ h + O h 2 f ''( x ) f x h f x h f x h O h 2 f( x+ h) f( x) f ''( x ) f x h Oh h 2 f( x+ h) f( x) f'( x) = + Oh ( ) h ( ) ( ) '( ) ( ) '( ) = ( + ) ( ) + ( ) 0 2 '( ) = + ( )
181 First-Order Second Forward Difference x x = h j+ 1 j x, x,, x, x, x, 0 1 i i+ 1 i+ 2 f ''( xi ) 2 3 f( x) = f( xi) + f '( xi) h+ h + O( h ) 2 f ''( xi ) 2 f( xi+ 2) 2 f( xi+ 1) + f( xi) = f( xi) + f '( xi)2h+ 4h 2 f ''( xi ) 2 2 f( xi) + f '( xi) h+ h + f( xi) + O( h ''( i ) ( ) = f x h + Oh f( xi+ 2) 2 f( xi+ 1) + f( xi) f''( xi ) = + Oh ( ) 2 h 3 )
182 Second-Order Forward Difference f( xi+ 1) f( xi) f ''( xi) 2 f'( xi ) = h+ Oh ( ) h 2 f( xi+ 2) 2 f( xi+ 1) + f( xi) f''( xi ) = + Oh ( ) 2 h f( x ) f( x ) f( x ) 2 f( x ) + f( x ) f x Oh h 2h f( xi+ 2) + 4 f( xi+ 1) 3 f( xi) 2 f'( x) = + Oh ( ) 2h f( x+ h) f( x) + Oh ( ) h i+ 1 i i+ 2 i+ 1 i 2 '( i ) = + ( )
183 f( x) = e x 2 x = 2 h =.2 f (2.0) = f (2.2) = f (2.4) = f(2.2) f(2.0) = f(2.4) + 4 f(2.2) 3 f(2.0) = f '( x) = 2xe x f '(2.0) =
184 Numerical error as a function of step size and method h E1 O(h) E2 O(h 2 )
185 Factors affecting approximation accuracy First or second order method Forward or centered difference Step size All these affect the accuracy of the method
186 h Forward 1 O(h) Forward 2 O(h 2 ) Center 1 O(h 2 ) Center 2 O(h 4 ) E E E E E E E E E E E E E E E E E E E E-10
187 Richardson Extrapolation Just as with numerical integration, estimates with different errors can be combined to reduce the error Can be applied iteratively to further reduce the error as in Romberg integration
188 D= Dh ( ) + Eh ( ) k Eh ( ) = Oh ( ) D= Dh ( ) + Eh ( ) = Dh ( ) + Eh ( ) E( h) kh h Eh ( ) kh h k k = k k h Eh ( ) ( ) k 1 1 Eh k 2 h2 h Dh ( ) Eh ( ) Dh ( ) Eh ( ) k k h2 2 Eh ( ) 2 Dh ( ) Dh ( ) h 2 1 k k 1 / h2 1 D= Dh + Eh Dh + Dh ( ) Dh ( ) Oh 2 1 k + 2 ( 2) ( 2) ( 2) which has error ( ) k k h1 / h2 1
189 h h = 2 1 /2 / h = 2 k k k 1 2 Dh ( ) Dh ( ) 2 Dh ( ) Dh ( ) Dh ( 2) + = h k = 2 h k k k k 1 / h Dh ( ) Dh ( ) 4 Dh ( ) Dh ( ) Dh ( 2) + = h k k 1 / h2 1 3
190 Ordinary Differential Equations ODE: solve for functions of one variable Possibly multiple equations and multiple functions, but usually one equation in one variable Functions of more than one variable can appear in partial differential equations (PDE s) Some ODE s can be solved analytically, but most cannot
191 Initial/Boundary Value Problem An initial value problem is an ODE in which the specifications that make the solution unique occur at a single value of the independent variable x or t A boundary value problem specifies the conditions at a number of different x or t values
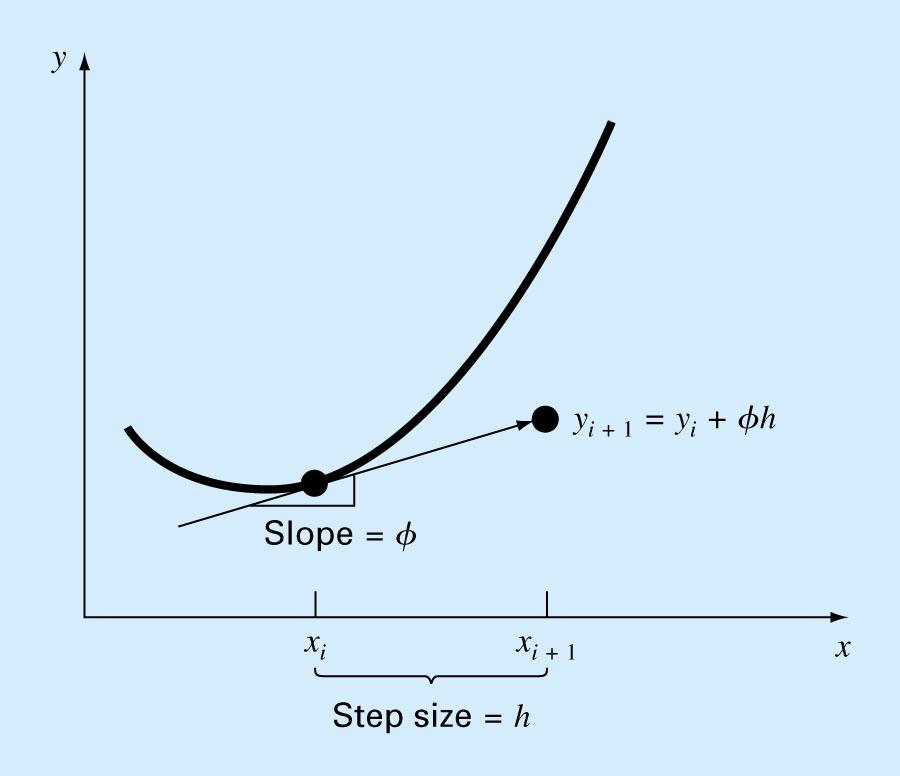
192 Consider an ODE of the form dy = f( xy, ) with initial conditions dx We can trace out a solution starting at ( x, y ) y = y + φh i+ 1 where x x = h i+ 1 dy φ = dx i i 0 0
193
194
195 Runge-Kutta methods Euler s method is the simplest of these one-step methods Improved slope estimates can improve the result These methods are called in general Runge-Kutta or RK methods
196 dy = f( xy, ) dx y = y + φh i+ 1 i dy φ = = dx ( x, y ) Euler's method i i f( x, y ) i i
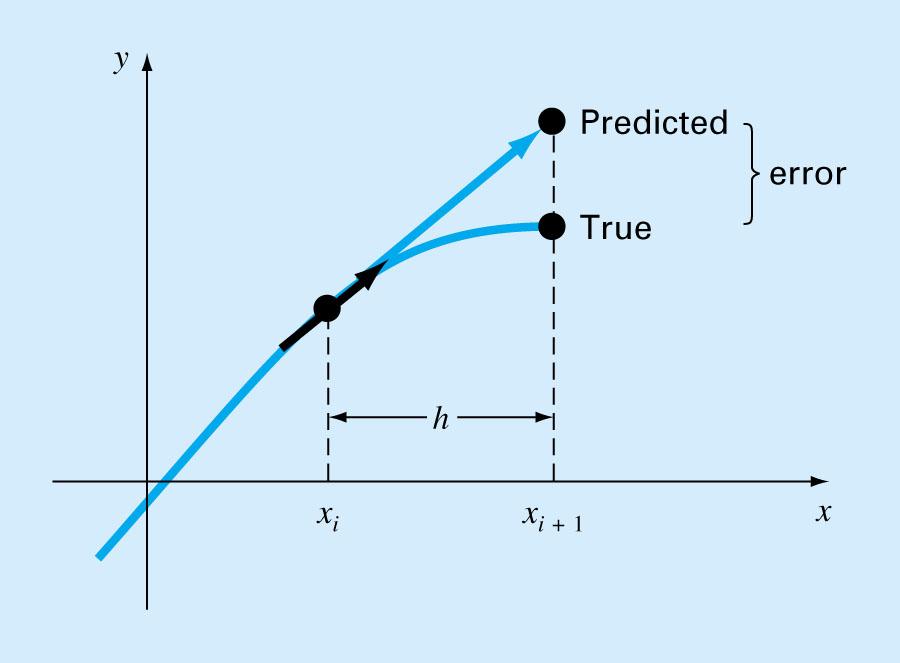
197 Errors in Euler s Method Errors are local to each step global or accumulated Errors are caused by truncation (when h is large) roundoff (when h is small and number of steps is large)
198 Euler s Method Is simple to implement Can be sufficiently accurate for many practical tasks if the step size is small enough No step size will result in a highly accurate result Higher order methods are needed
199 Improvements in Euler s Method We could use a higher order Taylor expansion at the current iterate to reduce truncation error This results in more analytical complexity due to the need for more derivatives Mostly, alternative methods are used to make the extrapolation more accurate Extrapolation is a hazardous business!
200 Heun s Method One problem with Euler s method is that it uses the derivative at the beginning of the interval to predict the change within the interval Heun s method uses a better estimate of the change, which is closer to the average derivative in the interval, rather than the initial derivative It is one of a class of predictor-corrector methods
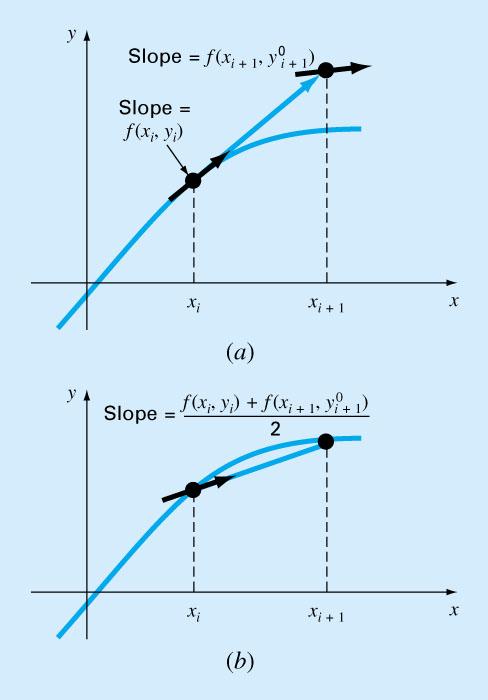
201
202 y = f( x, y ) i i i y y + f( x, y ) h Euler Step Predictor Equation 0 i+ 1 i i i y = f( x, y ) 0 i+ 1 i+ 1 i+ 1 y = i f( x, y ) + f( x, y ) 0 i i i+ 1 i f( xi, yi) + f( xi 1, yi 1) + + yi+ 1 = yi + h Corrector Equation 2 Can be iterated
203 a Integrate y = e y x = x = 0.8x from 0 to 4 with stepsize = 1 x = 0 then y = 2 Analytical y = ae + be 0.8x 0.5x y = 0.8ae 0.5be 0.8x 0.5x ( 0.8a ) ( ) ( ) 0 = y 4e + 0.5y = 0.8ae 0.5be 4e + 0.5ae + 0.5be a = + b= = + 4 / x 0.8x 0.5x 0.8x 0.8x 0.5x a e 0.8x 4 y = ( e e ) + 2e x 0.5x 0.5x
204 y = e y x = x = 0.8x from 0 to 4 with stepsize = 1 x = 0 then y = 2 x = 0 y = 2 y = 4-1 = y1 = 2 + 3(1) = 5 (true value at x = 1 is ) ε = / = t e = 0.8 y 1=4 0.5(5) y = ( ) / 2 = y 1 1 t = 2 + (4.7011)(1) = ε = / = 0.082
205 y = e y x = x = 0.8x from 0 to 4 with stepsize = 1 x = 0 then y = 2 x = 0 y = 2 y = 4-1 = 3 y y = 2 + 3(1) = 5 (true value at x = 1 is ) = 2 + (4.7011)(1) = = 0.8 y 1=4e 0.5(6.7010) y = ( ) / 2 = y 2 1 t = 2 + (4.2758)(1) = ε = / = 0.013
206
207 This will not, in general converge upon iteration to the true value of y i+1 This is because we are at best estimating the actual slope of the secant by the average of the slopes at the two ends, and even were the slopes at the two ends exact, this is not an identity
208 Integrate between 0 and 4, with y = 1 at x = 0 dy dx = x + x x x = 0 y = 1 h= Euler's Method x = 0.5 y = 8.5 y = 1 + (8.5)(0.5) = Heun's Method y = 1.25 y = y = 1+ (4.875)(0.5) = No iteration needed (True value is 3.00)
209 Midpoint Method Euler s method approximates the slope of the secant between two points by the slope at the left end of the interval Heun s method approximates it by the average of the estimated slopes at the endpoints The midpoint method approximates it by the estimated slope at the average of the endpoints
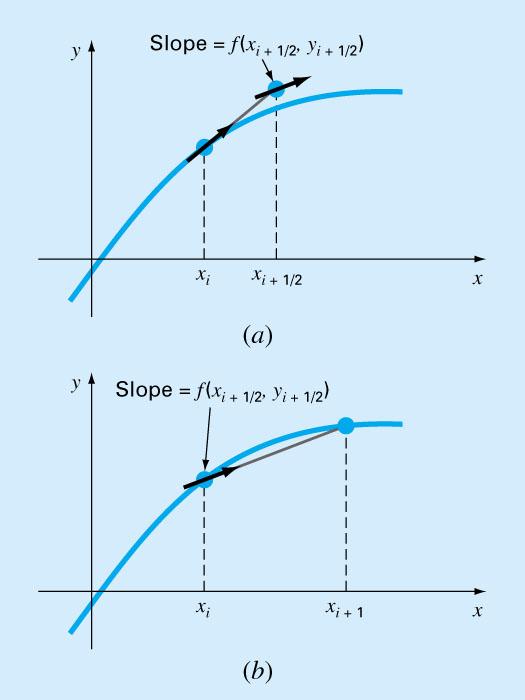
210
211 y 1/2 Integrate by midpoint method y = e y x= x= 0.8x from 0 to 4 with stepsize = 1 x= 0 then y = 2 x = 0 y = 2 y = 4-1= = 2 + 3(1/ 2) = 3.5 (true value at x= 1/ 2 is ) = 0.8/ 2 y 1/2 =4e 0.5(3.5) 1 t y = 2 + (4.2173)(1) = ε = / = / =
212 y = i f( x ) y y + f( x ) h Euler 0 i+ 1 i i y = f( x ) i+ 1 i+ 1 i f( xi) + f( xi+ 1) y i = 2 f( x ) + f( x ) = + 2 i i+ 1 yi+ 1 yi h f( x ) + f( x ) = 2 Trapezoid Rule i i+ 1 yi+ 1 yi h Heun
213 y = i f( x ) 0 + i+ 1 i i y y f( x ) h Euler = Riemann left y = f( x ) i+ 1/2 i+ 1/2 y = y + f( x ) h i+ 1 i i+ 1/2 Midpoint = Riemann midpoint y y = f( x ) h i+ 1 i i+ 1/2 i
214 Integrate between 0 and 4, with y = 1 at x = 0 dy = x + x x+ dx x = 0 y = 1 h= Euler's Method x = 0.5 y = 8.5 y = 1 + (8.5)(0.5) = Heun's Method y = 1.25 y = y = 1+ (4.875)(0.5) = Midpoint Method y = y = 1 + ( )(.5) = /2 1 (True value is 3.00)
215 Error Analysis Euler s method integrates exactly over an interval so long as the derivative at the beginning is the same as the slope of the secant line. This requires the derivative to be constant. y = f(x) = ax + b fulfills this requirement. The function must be linear. If f(x) is quadratic, then Heun s method and the midpoint method are exact
216 2 f x ax bx c ( ) f ( x ) f ( x ) = ( ax + bx + c) ( ax + bx + c) f( x ) f( x ) x x = + + = ax ( x) + bx ( x) [ ] = ( x x) ax ( + x) + b = ax ( + x) + b 1 0 f ( x1) + f ( x0) 2ax1+ b + 2ax0 + b = = ax ( 1+ x0) + b 2 2 f (( x + x )/2) = 2 a( x + x )/2 + b= a( x + x ) + b
217 Error Analysis If the function f(x) is approximated by a Taylor series, then Euler s method is exact on the first-order term, so the local error is O(h 2 ) Heun s method and the midpoint method are exact on the second-order approximation, so the local error is O(h 3 ) Since we are integrating O(h) intervals, the global error is O(h) for Euler and O(h 2 ) for Heun and the midpoint method
218 General Runge-Kutta Methods Achieve accuracy of higher order Taylor series expansions without having to compute additional terms explicitly Use the same general formulation as Euler s method, Heun s method, and the midpoint method in which the next point is the previous point plus the stepsize times an estimate of the slope.
219 y = f( xy, ) y i+ 1 i i i 1 φx = yy+ hh (,, ) φ= ak + ak + + ak k f( x, y ) i i k = f( x + ph, y + q kh) 2 i 1 i 11 1 k = f( x + ph, y + q kh+ q kh) 3 i 2 i n k = f( x + p h, y + q kh+ + q k h) n i n 1 i n 11 1 n 1n 1 n 1 n = 1 Euler's method n = 2 Heun/Midpoint method p = = 1 q = 1 a = 1/ 2 a = 1/ p = 1/ 2 q = 1/ 2 a = 0 a = n
220 Second-Order Runge-Kutta y = f( xy, ) yi+ φx 1 = yiy+ hh ( i, i, ) φ= ak 1 1+ ak 2 2 k1 = f( xi, yi) k2 = f( xi + ph 1, yi + q11kh 1 ) yi+ 1= yi + ( ak 1 1+ ak 2 2) h 1 d yi+ 1 yi + f( xi, yi) h+ f( xi, yi) h 2 dx d f( xy, ) f( xy, ) dy f( xy, ) = + dx x y dx y y + f( x, y ) h+ i+ 1 i i i 1 2 f + x 2 f dy h y dx 2
221 y = y + ( ak + ak ) h i+ 1 i f f dy yi+ 1 yi + f( xi, yi) h+ + h 2 x y dx k = f( x, y ) 1 i i f k2 = f( xi + ph 1, yi + q11kh 1 ) f( xi, yi) + ph 1 + q11kh 1 x 2 f 2 yi+ 1 = yi + ahf 1 ( xi, yi) + ahf 2 ( xi, yi) + ah 2 p1 + ahq 2 11 f( xi, yi) x = y+ af( x, y) + a i 1 i i 2 2 [ f( x, y )] h+ a p + a q f( x, y ) h 1= a+ a = 2a p = 2aq a = 1 a p = q = 1/2a f x f y 2 i i i i f y f y
222 y = y + ( ak + ak ) h i+ 1 i k 1 = f( x, y ) i k = f( x + ph, y + q kh) 2 i 1 i 11 1 a = 1 a p = q = 1/2a a = 1/2 a = 1/2 p = q = y = y + h( f( x, y ) + f( x + h, y + f( x, y ) h))/2 i+ 1 i i i i i i i Heun's Method i
223 y = y + ( ak + ak ) h i+ 1 i k 1 = f( x, y ) i i k = f( x + ph, y + q kh) 2 i 1 i 11 1 a = 1 a p = q = 1/2a a = 1 a = 0 p = q = 1/ y = y + hf( x + h/2, y + f( x, y ) h/2) i+ 1 i i i i i Midpoint Method
224 y = y + ( ak + ak ) h i+ 1 i k 1 = f( x, y ) i i k = f( x + ph, y + q kh) 2 i 1 i 11 1 a = 1 a p = q = 1/2a a = 2/3 a = 1/3 p = q = 3/ y = y + h( f( x, y ) + 2 f( x + 3 h/4, y + 3 f( x, y ) h/4))/3 i+ 1 i i i i i i i Ralston's Method
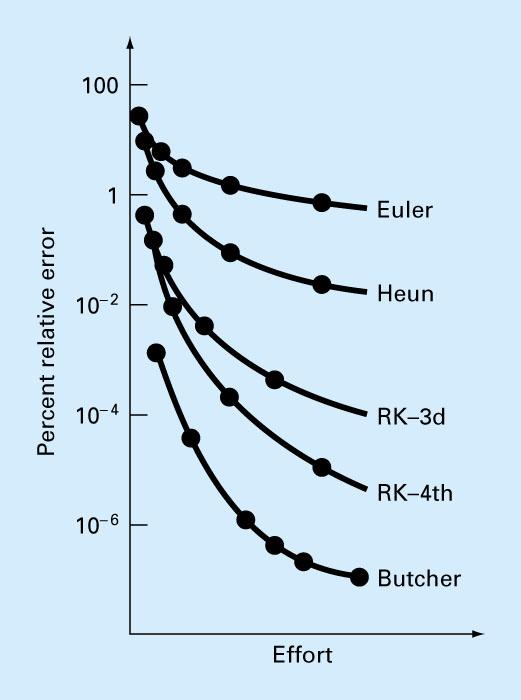
225 Higher-Order Methods Euler s method is RK order 1 and has global error O(h) Second-order RK methods (Heun, Midpoint, Ralston) have global error O(h 2 ) Third-order RK methods have global error O(h 3 ) Fourth-order RK methods have global error O(h 4 )
226 Derivation of RK Methods Second-order RK methods have four constants, and three equations from comparing the Taylor series expansion to the iteration. There is one undetermined constant Third-order methods have six equations with eight undetermined constants, so two are arbitrary.
227 y Third-Order Runge-Kutta y = f( xy, ) φx = yy+ hh (,, ) i+ 1 i i i φ= ak + ak + ak k 1 = f( x, y ) i i k = f( x + ph, y + q kh) 2 i 1 i 11 1 k = f( x + ph, y + q kh+ q kh) 3 i 2 i y = y + ( ak + ak + ak ) h i+ 1 i d 2 1 d yi+ 1 yi + f( xi, yi) h+ f( xi, yi) h + f( x, 2 i 2 dx 6 dx d f( xy, ) f( xy, ) dy f( xy, ) = + dx x y dx y ) h f( xy, ) f( xy, ) dy f( xy, ) dy f( xy, ) dy f( xy, ) = x x x y dx y dx y dx i 3
228 k 1 Common Third-Order Method = f( x, y ) i k = f( x + h/2, y + kh/2) 2 i i 1 k = f( x + h, y k h+ 2 k h) 3 i i 1 2 y = y + ( k + 4 k + k ) h/6 i+ 1 i i Reduces to Simpson's Rule
229 k 1 Standard Fourth-Order Method = f( x, y ) i k = f( x + h/2, y + kh/2) 2 i i 1 k = f( x+ h/2, y+ kh/2) 3 i i 2 k = f( x+ h, y+ kh) 4 i i 3 i y = y + ( k + 2k + 2 k + k ) h/6 i+ 1 i Reduces to Simpson's Rule
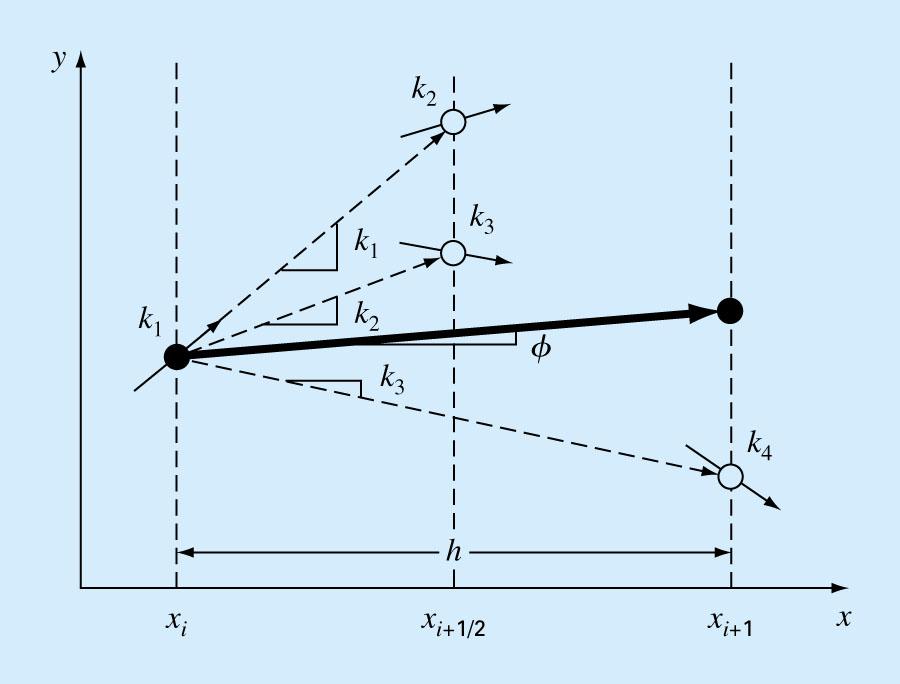
230
231 Comparing RK Methods Accuracy depends on the step size and the order Computational effort is usually measured in function evaluations Up to order 4, an order-m RK method requires m(b-a)/h function evaluations Butcher s order 5 method requires 6(b-a)/h
232
233 Systems of ODE s We track multiple responses y 1, y 2,, y n, each of which depends on a single variable x and on possibly all of the other responses We also need n initial conditions at x = x 0
234 dy dx dy dx 1 2 = = f( xy,, y,, y) f( xy,, y,, y) dyn = fn( xy, 1, y2,, yn) dx Euler's Method y = y + f( xy,, y,, y ) h ( i+ 1) () i () i () i () i j j j 1 2 n n n
235 dy dy = 0.5 y = 4 0.3y 0.1y dx dx Integrate x= 0 to x= with initial values y = 4y = 6, h= x y 1 y 2 y 1 y
236 RK Methods for ODE Systems We describe the common order 4 method. First determine slopes at initial value for all variables, this gives a set of n k 1 values. Then use these to estimate a set of functional values at the midpoint and slopes Use these to get improved midpoint values and slopes Use these to get estimate of value and slope at end Combine for final projection
237 dy dy = 0.5 y = 4 0.3y 0.1y dx dx Integrate x= 0 to x= with initial values y = 4y = 6, h= 0.5 k = f( x, y ) i 2 i i 1 3 i i 2 4 i i k = f( x + h/2, y + kh/2) k = f( x+ h/2, y+ kh/2) k = f( x+ h, y+ kh) i y = y + ( k + 2k + 2 k + k ) h/6 i+ 1 i
238 dy dy = 0.5 y = 4 0.3y 0.1 y dx dx x= 0, 2 y = 4y = 6, h= 0.5 k k k k ,1 1 1,2 2 2, , = f (0, 4,6) = 2 = f (0, 4, 6) = 4 0.3(6) 0.1(4) = 1.8 = f (0.25, 4 + ( 2)(0.5) / 2,6 + (1.8)(0.5) / 2) = f (0.25,3.5, 6.45) = 1.75 = f (0.25,3.5, 6.45) =
239 dy dy = 0.5 y = 4 0.3y 0.1 y dx dx x= 0, 2 y = 4y = 6, h= k = 2 k = 1.8 k = 1.75 k = k k k k 1,1 1,2 2,1 2,2 = f (0.25, 4 + ( 1.75)(0.5) / 2, 6 + (1.715)(0.5) / 2) 3,1 1 = f (0.25,3.5625, ) = = f 1 3,2 2 4, ,2 2 (0.25,3.5625, ) = = f (0.5, 4 + ( )(0.5), 6 + ( )(0.5)) = f (0.5, , ) = = f (0.5, , ) =
240 y y 1 2 dy dy = 0.5 y = 4 0.3y 0.1 y dx dx x= 0, 2 y = 4y = 6, h= k = 2 k = 1.8 k = 1.75 k = k k 1,1 1,2 2,1 2,2 = k = ,1 3,2 = k = ,1 4,2 (0.5) = 4 + ( 2 + 2( 1.75) + 2( ) + ( ))(0.5) / 6 = (0.5) = 6 + ( (1.715) + 2( ) )(0.5) / 6 =
241 Adaptive RK Methods A fixed step size may be overkill for some regions of a function and may be too large to be accurate for others Adaptive methods use different step sizes for different regions of the function Several methods for accomplishing this Use different step sizes but same order Use different orders
242
243 Adaptive RK or Step-Halving Predict over step with order 4 RK, obtain prediction y 1 Predict with two steps of half step size to obtain prediction y 2 Difference Δ = y 2 y 1 is an estimate of the error that can be used to control step size adjustment y 2* = y 2 + Δ/15 is fifth order accurate
244 0.8x y 4e 0.5y x = 0 to 2, h = 2 y(0) = 2 True value at 2 is Full step prediction k = f( x, y ) = f(0,2) = 3 1 = i i k = f( x + h/ 2, y + kh/ 2) = f(1,5) = i i 1 k = f( x+ h/ 2, y+ kh/ 2) = f(1, )= i i 2 k4 = f( xi + hy, i + k 3 h) = f(2, )= y = y + ( k + 2k + 2 k + k ) h/ 6 = i+ 1 i
245 y y 0.8x y = 4e 0.5y x = 0 to 2, h = 2 y(0) = 2 True value at 2 is Full step prediction is Half-step predictions are i+ 1 i+ 2 E E y E a t * t = 2 + (3 + 2( ) )1/ 6 = = ( ( ) )1/ 6 = = ( ) /15 = = = = ( ) = = =
246 Fehlberg/Cash-Karp RK Instead of using two different step sizes, we can use two different orders This may use too many function evaluations unless the two orders are coordinated Fehlberg RK uses a fifth order method using the same function evaluations as a fourth order method Coefficients due to Cash and Karp
247 (4) yi+ 1 = yi + k1+ k3+ k4 + k6 h (5) yi+ 1 = yi + k1+ k3+ k4 + k5 + k6 h k = f( x, y ) 1 i i 1 1 k2 = f( xi + h, yi + kh 1 ) k3 = f( xi + h, yi + kh 1 + kh 2 ) k4 = f( xi + hy, i + kh 1 kh 2 + kh 3 ) k5 = f( xi + h, yi kh 1 + kh 2 kh 3 + kh 4 ) k6 = f( xi + h, yi + kh 1 + kh 2 + kh 3 + kh 4 + kh 5 )
248 Values needed for RK Fehlberg for the example. x y f(x,y) k k k k k k
249 y (4) i = h = (5) yi+ 1 = yi h = E a = =
250 Step Size Control First we specify desired accuracy Relative error can be a problem if the function is near 0 Absolute error takes no account of the scale of the function One method is to let the desired accuracy depend on a multiple of both the function and its derivative
251 = ε y y new scale = y scale dy yscale = y + h dx h new = h present new present α α =.2 when the step size is increased α =.25 when the step size is decreased This is one scheme of many for adaptive step size
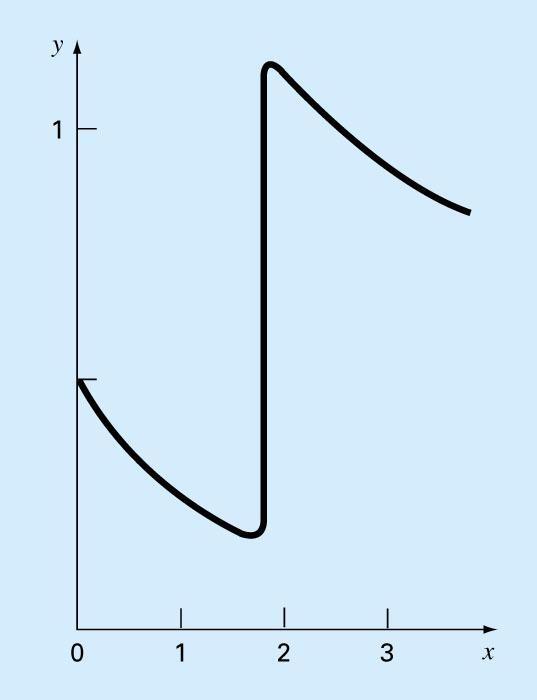
252 Example: 2 dy ( x 2) + 0.6y = 10exp dx 2(0.075) y(0) = 0.5 General Solution y = 0.5exp( 0.6 x) 2
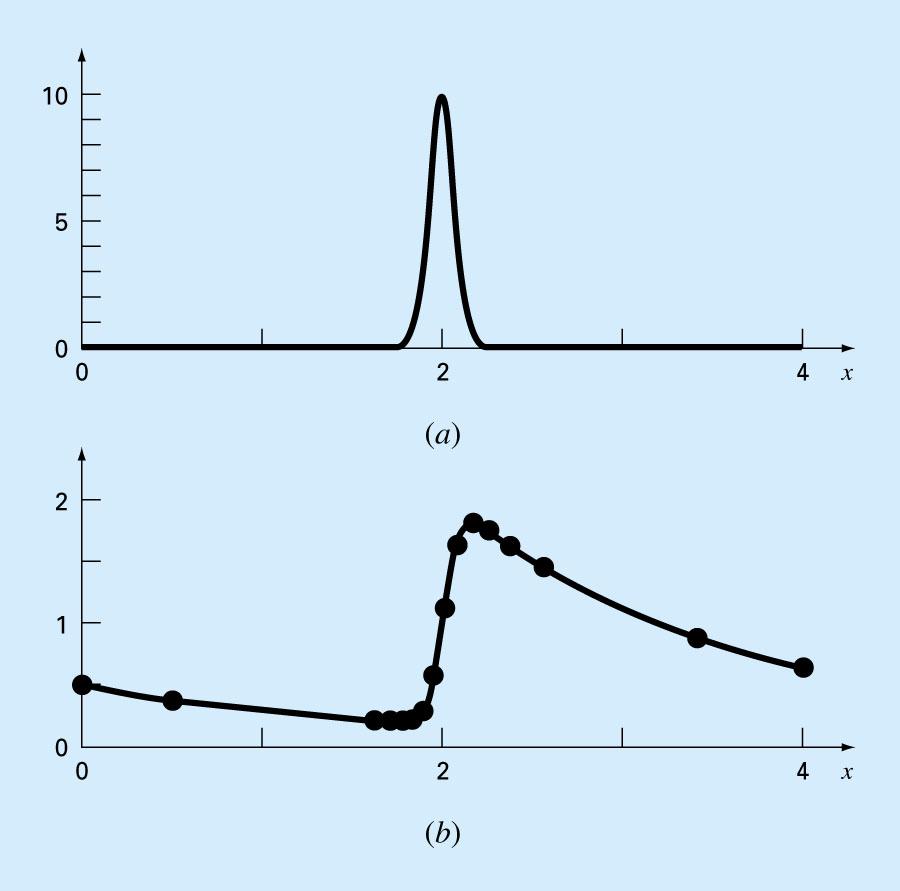
253
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation
Review. Numerical Methods Lecture 22. Prof. Jinbo Bi CSE, UConn
 Review Taylor Series and Error Analysis Roots of Equations Linear Algebraic Equations Optimization Numerical Differentiation and Integration Ordinary Differential Equations Partial Differential Equations
Review Taylor Series and Error Analysis Roots of Equations Linear Algebraic Equations Optimization Numerical Differentiation and Integration Ordinary Differential Equations Partial Differential Equations
Integration, differentiation, and root finding. Phys 420/580 Lecture 7
 Integration, differentiation, and root finding Phys 420/580 Lecture 7 Numerical integration Compute an approximation to the definite integral I = b Find area under the curve in the interval Trapezoid Rule:
Integration, differentiation, and root finding Phys 420/580 Lecture 7 Numerical integration Compute an approximation to the definite integral I = b Find area under the curve in the interval Trapezoid Rule:
Numerical Methods. King Saud University
 Numerical Methods King Saud University Aims In this lecture, we will... find the approximate solutions of derivative (first- and second-order) and antiderivative (definite integral only). Numerical Differentiation
Numerical Methods King Saud University Aims In this lecture, we will... find the approximate solutions of derivative (first- and second-order) and antiderivative (definite integral only). Numerical Differentiation
(f(x) P 3 (x)) dx. (a) The Lagrange formula for the error is given by
 P 3 (x)) dx. (a) The Lagrange formula for the error is given by") 1. QUESTION (a) Given a nth degree Taylor polynomial P n (x) of a function f(x), expanded about x = x 0, write down the Lagrange formula for the truncation error, carefully defining all its elements. How
1. QUESTION (a) Given a nth degree Taylor polynomial P n (x) of a function f(x), expanded about x = x 0, write down the Lagrange formula for the truncation error, carefully defining all its elements. How
CS 450 Numerical Analysis. Chapter 8: Numerical Integration and Differentiation
 Lecture slides based on the textbook Scientific Computing: An Introductory Survey by Michael T. Heath, copyright c 2018 by the Society for Industrial and Applied Mathematics. http://www.siam.org/books/cl80
Lecture slides based on the textbook Scientific Computing: An Introductory Survey by Michael T. Heath, copyright c 2018 by the Society for Industrial and Applied Mathematics. http://www.siam.org/books/cl80
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 5 Chapter 21 Numerical Differentiation PowerPoints organized by Dr. Michael R. Gustafson II, Duke University 1 All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 5 Chapter 21 Numerical Differentiation PowerPoints organized by Dr. Michael R. Gustafson II, Duke University 1 All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
NUMERICAL MATHEMATICS AND COMPUTING
 NUMERICAL MATHEMATICS AND COMPUTING Fourth Edition Ward Cheney David Kincaid The University of Texas at Austin 9 Brooks/Cole Publishing Company I(T)P An International Thomson Publishing Company Pacific
NUMERICAL MATHEMATICS AND COMPUTING Fourth Edition Ward Cheney David Kincaid The University of Texas at Austin 9 Brooks/Cole Publishing Company I(T)P An International Thomson Publishing Company Pacific
ECE257 Numerical Methods and Scientific Computing. Ordinary Differential Equations
 ECE257 Numerical Methods and Scientific Computing Ordinary Differential Equations Today s s class: Stiffness Multistep Methods Stiff Equations Stiffness occurs in a problem where two or more independent
ECE257 Numerical Methods and Scientific Computing Ordinary Differential Equations Today s s class: Stiffness Multistep Methods Stiff Equations Stiffness occurs in a problem where two or more independent
Applied Numerical Analysis
 Applied Numerical Analysis Using MATLAB Second Edition Laurene V. Fausett Texas A&M University-Commerce PEARSON Prentice Hall Upper Saddle River, NJ 07458 Contents Preface xi 1 Foundations 1 1.1 Introductory
Applied Numerical Analysis Using MATLAB Second Edition Laurene V. Fausett Texas A&M University-Commerce PEARSON Prentice Hall Upper Saddle River, NJ 07458 Contents Preface xi 1 Foundations 1 1.1 Introductory
Numerical Integration (Quadrature) Another application for our interpolation tools!
 Another application for our interpolation tools!") Numerical Integration (Quadrature) Another application for our interpolation tools! Integration: Area under a curve Curve = data or function Integrating data Finite number of data points spacing specified
Numerical Integration (Quadrature) Another application for our interpolation tools! Integration: Area under a curve Curve = data or function Integrating data Finite number of data points spacing specified
Jim Lambers MAT 460/560 Fall Semester Practice Final Exam
 Jim Lambers MAT 460/560 Fall Semester 2009-10 Practice Final Exam 1. Let f(x) = sin 2x + cos 2x. (a) Write down the 2nd Taylor polynomial P 2 (x) of f(x) centered around x 0 = 0. (b) Write down the corresponding
Jim Lambers MAT 460/560 Fall Semester 2009-10 Practice Final Exam 1. Let f(x) = sin 2x + cos 2x. (a) Write down the 2nd Taylor polynomial P 2 (x) of f(x) centered around x 0 = 0. (b) Write down the corresponding
TABLE OF CONTENTS INTRODUCTION, APPROXIMATION & ERRORS 1. Chapter Introduction to numerical methods 1 Multiple-choice test 7 Problem set 9
 TABLE OF CONTENTS INTRODUCTION, APPROXIMATION & ERRORS 1 Chapter 01.01 Introduction to numerical methods 1 Multiple-choice test 7 Problem set 9 Chapter 01.02 Measuring errors 11 True error 11 Relative
TABLE OF CONTENTS INTRODUCTION, APPROXIMATION & ERRORS 1 Chapter 01.01 Introduction to numerical methods 1 Multiple-choice test 7 Problem set 9 Chapter 01.02 Measuring errors 11 True error 11 Relative
Differentiation and Integration
 Differentiation and Integration (Lectures on Numerical Analysis for Economists II) Jesús Fernández-Villaverde 1 and Pablo Guerrón 2 February 12, 2018 1 University of Pennsylvania 2 Boston College Motivation
Differentiation and Integration (Lectures on Numerical Analysis for Economists II) Jesús Fernández-Villaverde 1 and Pablo Guerrón 2 February 12, 2018 1 University of Pennsylvania 2 Boston College Motivation
Preface. 2 Linear Equations and Eigenvalue Problem 22
 Contents Preface xv 1 Errors in Computation 1 1.1 Introduction 1 1.2 Floating Point Representation of Number 1 1.3 Binary Numbers 2 1.3.1 Binary number representation in computer 3 1.4 Significant Digits
Contents Preface xv 1 Errors in Computation 1 1.1 Introduction 1 1.2 Floating Point Representation of Number 1 1.3 Binary Numbers 2 1.3.1 Binary number representation in computer 3 1.4 Significant Digits
Computational Methods
 Numerical Computational Methods Revised Edition P. B. Patil U. P. Verma Alpha Science International Ltd. Oxford, U.K. CONTENTS Preface List ofprograms v vii 1. NUMER1CAL METHOD, ERROR AND ALGORITHM 1 1.1
Numerical Computational Methods Revised Edition P. B. Patil U. P. Verma Alpha Science International Ltd. Oxford, U.K. CONTENTS Preface List ofprograms v vii 1. NUMER1CAL METHOD, ERROR AND ALGORITHM 1 1.1
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF MATHEMATICS ACADEMIC YEAR / EVEN SEMESTER QUESTION BANK
 KINGS COLLEGE OF ENGINEERING MA5-NUMERICAL METHODS DEPARTMENT OF MATHEMATICS ACADEMIC YEAR 00-0 / EVEN SEMESTER QUESTION BANK SUBJECT NAME: NUMERICAL METHODS YEAR/SEM: II / IV UNIT - I SOLUTION OF EQUATIONS
KINGS COLLEGE OF ENGINEERING MA5-NUMERICAL METHODS DEPARTMENT OF MATHEMATICS ACADEMIC YEAR 00-0 / EVEN SEMESTER QUESTION BANK SUBJECT NAME: NUMERICAL METHODS YEAR/SEM: II / IV UNIT - I SOLUTION OF EQUATIONS
AM205: Assignment 3 (due 5 PM, October 20)
") AM25: Assignment 3 (due 5 PM, October 2) For this assignment, first complete problems 1, 2, 3, and 4, and then complete either problem 5 (on theory) or problem 6 (on an application). If you submit answers
AM25: Assignment 3 (due 5 PM, October 2) For this assignment, first complete problems 1, 2, 3, and 4, and then complete either problem 5 (on theory) or problem 6 (on an application). If you submit answers
GENG2140, S2, 2012 Week 7: Curve fitting
 GENG2140, S2, 2012 Week 7: Curve fitting Curve fitting is the process of constructing a curve, or mathematical function, f(x) that has the best fit to a series of data points Involves fitting lines and
GENG2140, S2, 2012 Week 7: Curve fitting Curve fitting is the process of constructing a curve, or mathematical function, f(x) that has the best fit to a series of data points Involves fitting lines and
Section Least Squares Regression
 Section 2.3 - Least Squares Regression Statistics 104 Autumn 2004 Copyright c 2004 by Mark E. Irwin Regression Correlation gives us a strength of a linear relationship is, but it doesn t tell us what it
Section 2.3 - Least Squares Regression Statistics 104 Autumn 2004 Copyright c 2004 by Mark E. Irwin Regression Correlation gives us a strength of a linear relationship is, but it doesn t tell us what it
Introductory Numerical Analysis
 Introductory Numerical Analysis Lecture Notes December 16, 017 Contents 1 Introduction to 1 11 Floating Point Numbers 1 1 Computational Errors 13 Algorithm 3 14 Calculus Review 3 Root Finding 5 1 Bisection
Introductory Numerical Analysis Lecture Notes December 16, 017 Contents 1 Introduction to 1 11 Floating Point Numbers 1 1 Computational Errors 13 Algorithm 3 14 Calculus Review 3 Root Finding 5 1 Bisection
Virtual University of Pakistan
 Virtual University of Pakistan File Version v.0.0 Prepared For: Final Term Note: Use Table Of Content to view the Topics, In PDF(Portable Document Format) format, you can check Bookmarks menu Disclaimer:
Virtual University of Pakistan File Version v.0.0 Prepared For: Final Term Note: Use Table Of Content to view the Topics, In PDF(Portable Document Format) format, you can check Bookmarks menu Disclaimer:
you expect to encounter difficulties when trying to solve A x = b? 4. A composite quadrature rule has error associated with it in the following form
 Qualifying exam for numerical analysis (Spring 2017) Show your work for full credit. If you are unable to solve some part, attempt the subsequent parts. 1. Consider the following finite difference: f (0)
Qualifying exam for numerical analysis (Spring 2017) Show your work for full credit. If you are unable to solve some part, attempt the subsequent parts. 1. Consider the following finite difference: f (0)
Numerical Methods in Physics and Astrophysics
 Kostas Kokkotas 2 October 17, 2017 2 http://www.tat.physik.uni-tuebingen.de/ kokkotas Kostas Kokkotas 3 TOPICS 1. Solving nonlinear equations 2. Solving linear systems of equations 3. Interpolation, approximation
Kostas Kokkotas 2 October 17, 2017 2 http://www.tat.physik.uni-tuebingen.de/ kokkotas Kostas Kokkotas 3 TOPICS 1. Solving nonlinear equations 2. Solving linear systems of equations 3. Interpolation, approximation
Chapter 5: Numerical Integration and Differentiation
 Chapter 5: Numerical Integration and Differentiation PART I: Numerical Integration Newton-Cotes Integration Formulas The idea of Newton-Cotes formulas is to replace a complicated function or tabulated
Chapter 5: Numerical Integration and Differentiation PART I: Numerical Integration Newton-Cotes Integration Formulas The idea of Newton-Cotes formulas is to replace a complicated function or tabulated
In numerical analysis quadrature refers to the computation of definite integrals.
 Numerical Quadrature In numerical analysis quadrature refers to the computation of definite integrals. f(x) a x i x i+1 x i+2 b x A traditional way to perform numerical integration is to take a piece of
Numerical Quadrature In numerical analysis quadrature refers to the computation of definite integrals. f(x) a x i x i+1 x i+2 b x A traditional way to perform numerical integration is to take a piece of
x x2 2 + x3 3 x4 3. Use the divided-difference method to find a polynomial of least degree that fits the values shown: (b)
") Numerical Methods - PROBLEMS. The Taylor series, about the origin, for log( + x) is x x2 2 + x3 3 x4 4 + Find an upper bound on the magnitude of the truncation error on the interval x.5 when log( + x)
Numerical Methods - PROBLEMS. The Taylor series, about the origin, for log( + x) is x x2 2 + x3 3 x4 4 + Find an upper bound on the magnitude of the truncation error on the interval x.5 when log( + x)
Numerical Methods in Physics and Astrophysics
 Kostas Kokkotas 2 October 20, 2014 2 http://www.tat.physik.uni-tuebingen.de/ kokkotas Kostas Kokkotas 3 TOPICS 1. Solving nonlinear equations 2. Solving linear systems of equations 3. Interpolation, approximation
Kostas Kokkotas 2 October 20, 2014 2 http://www.tat.physik.uni-tuebingen.de/ kokkotas Kostas Kokkotas 3 TOPICS 1. Solving nonlinear equations 2. Solving linear systems of equations 3. Interpolation, approximation
Applied Numerical Analysis (AE2220-I) R. Klees and R.P. Dwight
 R. Klees and R.P. Dwight") Applied Numerical Analysis (AE0-I) R. Klees and R.P. Dwight February 018 Contents 1 Preliminaries: Motivation, Computer arithmetic, Taylor series 1 1.1 Numerical Analysis Motivation..........................
Applied Numerical Analysis (AE0-I) R. Klees and R.P. Dwight February 018 Contents 1 Preliminaries: Motivation, Computer arithmetic, Taylor series 1 1.1 Numerical Analysis Motivation..........................
Engg. Math. II (Unit-IV) Numerical Analysis
 Numerical Analysis") Dr. Satish Shukla of 33 Engg. Math. II (Unit-IV) Numerical Analysis Syllabus. Interpolation and Curve Fitting: Introduction to Interpolation; Calculus of Finite Differences; Finite Difference and Divided
Dr. Satish Shukla of 33 Engg. Math. II (Unit-IV) Numerical Analysis Syllabus. Interpolation and Curve Fitting: Introduction to Interpolation; Calculus of Finite Differences; Finite Difference and Divided
Chapter 11 ORDINARY DIFFERENTIAL EQUATIONS
 Chapter 11 ORDINARY DIFFERENTIAL EQUATIONS The general form of a first order differential equations is = f(x, y) with initial condition y(a) = y a We seek the solution y = y(x) for x > a This is shown
Chapter 11 ORDINARY DIFFERENTIAL EQUATIONS The general form of a first order differential equations is = f(x, y) with initial condition y(a) = y a We seek the solution y = y(x) for x > a This is shown
Numerical integration and differentiation. Unit IV. Numerical Integration and Differentiation. Plan of attack. Numerical integration.
 Unit IV Numerical Integration and Differentiation Numerical integration and differentiation quadrature classical formulas for equally spaced nodes improper integrals Gaussian quadrature and orthogonal
Unit IV Numerical Integration and Differentiation Numerical integration and differentiation quadrature classical formulas for equally spaced nodes improper integrals Gaussian quadrature and orthogonal
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 6 Chapter 20 Initial-Value Problems PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 6 Chapter 20 Initial-Value Problems PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Scientific Computing: Numerical Integration
 Scientific Computing: Numerical Integration Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Fall 2015 Nov 5th, 2015 A. Donev (Courant Institute) Lecture
Scientific Computing: Numerical Integration Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Fall 2015 Nov 5th, 2015 A. Donev (Courant Institute) Lecture
Exact and Approximate Numbers:
 Eact and Approimate Numbers: The numbers that arise in technical applications are better described as eact numbers because there is not the sort of uncertainty in their values that was described above.
Eact and Approimate Numbers: The numbers that arise in technical applications are better described as eact numbers because there is not the sort of uncertainty in their values that was described above.
MA1023-Methods of Mathematics-15S2 Tutorial 1
 Tutorial 1 the week starting from 19/09/2016. Q1. Consider the function = 1. Write down the nth degree Taylor Polynomial near > 0. 2. Show that the remainder satisfies, < if > > 0 if > > 0 3. Show that
Tutorial 1 the week starting from 19/09/2016. Q1. Consider the function = 1. Write down the nth degree Taylor Polynomial near > 0. 2. Show that the remainder satisfies, < if > > 0 if > > 0 3. Show that
(0, 0), (1, ), (2, ), (3, ), (4, ), (5, ), (6, ).
, (1, ), (2, ), (3, ), (4, ), (5, ), (6, ).") 1 Interpolation: The method of constructing new data points within the range of a finite set of known data points That is if (x i, y i ), i = 1, N are known, with y i the dependent variable and x i [x
1 Interpolation: The method of constructing new data points within the range of a finite set of known data points That is if (x i, y i ), i = 1, N are known, with y i the dependent variable and x i [x
Numerical Analysis. A Comprehensive Introduction. H. R. Schwarz University of Zürich Switzerland. with a contribution by
 Numerical Analysis A Comprehensive Introduction H. R. Schwarz University of Zürich Switzerland with a contribution by J. Waldvogel Swiss Federal Institute of Technology, Zürich JOHN WILEY & SONS Chichester
Numerical Analysis A Comprehensive Introduction H. R. Schwarz University of Zürich Switzerland with a contribution by J. Waldvogel Swiss Federal Institute of Technology, Zürich JOHN WILEY & SONS Chichester
Numerical Optimization
 Numerical Optimization Unit 2: Multivariable optimization problems Che-Rung Lee Scribe: February 28, 2011 (UNIT 2) Numerical Optimization February 28, 2011 1 / 17 Partial derivative of a two variable function
Numerical Optimization Unit 2: Multivariable optimization problems Che-Rung Lee Scribe: February 28, 2011 (UNIT 2) Numerical Optimization February 28, 2011 1 / 17 Partial derivative of a two variable function
Name of the Student: Unit I (Solution of Equations and Eigenvalue Problems)
") Engineering Mathematics 8 SUBJECT NAME : Numerical Methods SUBJECT CODE : MA6459 MATERIAL NAME : University Questions REGULATION : R3 UPDATED ON : November 7 (Upto N/D 7 Q.P) (Scan the above Q.R code for
Engineering Mathematics 8 SUBJECT NAME : Numerical Methods SUBJECT CODE : MA6459 MATERIAL NAME : University Questions REGULATION : R3 UPDATED ON : November 7 (Upto N/D 7 Q.P) (Scan the above Q.R code for
Section 6.6 Gaussian Quadrature
 Section 6.6 Gaussian Quadrature Key Terms: Method of undetermined coefficients Nonlinear systems Gaussian quadrature Error Legendre polynomials Inner product Adapted from http://pathfinder.scar.utoronto.ca/~dyer/csca57/book_p/node44.html
Section 6.6 Gaussian Quadrature Key Terms: Method of undetermined coefficients Nonlinear systems Gaussian quadrature Error Legendre polynomials Inner product Adapted from http://pathfinder.scar.utoronto.ca/~dyer/csca57/book_p/node44.html
CS 257: Numerical Methods
 CS 57: Numerical Methods Final Exam Study Guide Version 1.00 Created by Charles Feng http://www.fenguin.net CS 57: Numerical Methods Final Exam Study Guide 1 Contents 1 Introductory Matter 3 1.1 Calculus
CS 57: Numerical Methods Final Exam Study Guide Version 1.00 Created by Charles Feng http://www.fenguin.net CS 57: Numerical Methods Final Exam Study Guide 1 Contents 1 Introductory Matter 3 1.1 Calculus
Preliminary Examination in Numerical Analysis
 Department of Applied Mathematics Preliminary Examination in Numerical Analysis August 7, 06, 0 am pm. Submit solutions to four (and no more) of the following six problems. Show all your work, and justify
Department of Applied Mathematics Preliminary Examination in Numerical Analysis August 7, 06, 0 am pm. Submit solutions to four (and no more) of the following six problems. Show all your work, and justify
COURSE Numerical integration of functions (continuation) 3.3. The Romberg s iterative generation method
 3.3. The Romberg s iterative generation method") COURSE 7 3. Numerical integration of functions (continuation) 3.3. The Romberg s iterative generation method The presence of derivatives in the remainder difficulties in applicability to practical problems
COURSE 7 3. Numerical integration of functions (continuation) 3.3. The Romberg s iterative generation method The presence of derivatives in the remainder difficulties in applicability to practical problems
Applied Math for Engineers
 Applied Math for Engineers Ming Zhong Lecture 15 March 28, 2018 Ming Zhong (JHU) AMS Spring 2018 1 / 28 Recap Table of Contents 1 Recap 2 Numerical ODEs: Single Step Methods 3 Multistep Methods 4 Method
Applied Math for Engineers Ming Zhong Lecture 15 March 28, 2018 Ming Zhong (JHU) AMS Spring 2018 1 / 28 Recap Table of Contents 1 Recap 2 Numerical ODEs: Single Step Methods 3 Multistep Methods 4 Method
MATHEMATICAL METHODS INTERPOLATION
 MATHEMATICAL METHODS INTERPOLATION I YEAR BTech By Mr Y Prabhaker Reddy Asst Professor of Mathematics Guru Nanak Engineering College Ibrahimpatnam, Hyderabad SYLLABUS OF MATHEMATICAL METHODS (as per JNTU
MATHEMATICAL METHODS INTERPOLATION I YEAR BTech By Mr Y Prabhaker Reddy Asst Professor of Mathematics Guru Nanak Engineering College Ibrahimpatnam, Hyderabad SYLLABUS OF MATHEMATICAL METHODS (as per JNTU
Numerical Analysis Preliminary Exam 10 am to 1 pm, August 20, 2018
 Numerical Analysis Preliminary Exam 1 am to 1 pm, August 2, 218 Instructions. You have three hours to complete this exam. Submit solutions to four (and no more) of the following six problems. Please start
Numerical Analysis Preliminary Exam 1 am to 1 pm, August 2, 218 Instructions. You have three hours to complete this exam. Submit solutions to four (and no more) of the following six problems. Please start
Review for Exam 2 Ben Wang and Mark Styczynski
 Review for Exam Ben Wang and Mark Styczynski This is a rough approximation of what we went over in the review session. This is actually more detailed in portions than what we went over. Also, please note
Review for Exam Ben Wang and Mark Styczynski This is a rough approximation of what we went over in the review session. This is actually more detailed in portions than what we went over. Also, please note
Fundamental Numerical Methods for Electrical Engineering
 Stanislaw Rosloniec Fundamental Numerical Methods for Electrical Engineering 4y Springei Contents Introduction xi 1 Methods for Numerical Solution of Linear Equations 1 1.1 Direct Methods 5 1.1.1 The Gauss
Stanislaw Rosloniec Fundamental Numerical Methods for Electrical Engineering 4y Springei Contents Introduction xi 1 Methods for Numerical Solution of Linear Equations 1 1.1 Direct Methods 5 1.1.1 The Gauss
FIRST-ORDER ORDINARY DIFFERENTIAL EQUATIONS II: Graphical and Numerical Methods David Levermore Department of Mathematics University of Maryland
 FIRST-ORDER ORDINARY DIFFERENTIAL EQUATIONS II: Graphical and Numerical Methods David Levermore Department of Mathematics University of Maryland 9 January 0 Because the presentation of this material in
FIRST-ORDER ORDINARY DIFFERENTIAL EQUATIONS II: Graphical and Numerical Methods David Levermore Department of Mathematics University of Maryland 9 January 0 Because the presentation of this material in
Numerical Methods for Engineers. and Scientists. Applications using MATLAB. An Introduction with. Vish- Subramaniam. Third Edition. Amos Gilat.
 Numerical Methods for Engineers An Introduction with and Scientists Applications using MATLAB Third Edition Amos Gilat Vish- Subramaniam Department of Mechanical Engineering The Ohio State University Wiley
Numerical Methods for Engineers An Introduction with and Scientists Applications using MATLAB Third Edition Amos Gilat Vish- Subramaniam Department of Mechanical Engineering The Ohio State University Wiley
Math 411 Preliminaries
 Math 411 Preliminaries Provide a list of preliminary vocabulary and concepts Preliminary Basic Netwon's method, Taylor series expansion (for single and multiple variables), Eigenvalue, Eigenvector, Vector
Math 411 Preliminaries Provide a list of preliminary vocabulary and concepts Preliminary Basic Netwon's method, Taylor series expansion (for single and multiple variables), Eigenvalue, Eigenvector, Vector
Differential Equations
 Differential Equations Definitions Finite Differences Taylor Series based Methods: Euler Method Runge-Kutta Methods Improved Euler, Midpoint methods Runge Kutta (2nd, 4th order) methods Predictor-Corrector
Differential Equations Definitions Finite Differences Taylor Series based Methods: Euler Method Runge-Kutta Methods Improved Euler, Midpoint methods Runge Kutta (2nd, 4th order) methods Predictor-Corrector
Principles of Scientific Computing Local Analysis
 Principles of Scientific Computing Local Analysis David Bindel and Jonathan Goodman last revised January 2009, printed February 25, 2009 1 Among the most common computational tasks are differentiation,
Principles of Scientific Computing Local Analysis David Bindel and Jonathan Goodman last revised January 2009, printed February 25, 2009 1 Among the most common computational tasks are differentiation,
Department of Applied Mathematics and Theoretical Physics. AMA 204 Numerical analysis. Exam Winter 2004
 Department of Applied Mathematics and Theoretical Physics AMA 204 Numerical analysis Exam Winter 2004 The best six answers will be credited All questions carry equal marks Answer all parts of each question
Department of Applied Mathematics and Theoretical Physics AMA 204 Numerical analysis Exam Winter 2004 The best six answers will be credited All questions carry equal marks Answer all parts of each question
Numerical Mathematics
 Alfio Quarteroni Riccardo Sacco Fausto Saleri Numerical Mathematics Second Edition With 135 Figures and 45 Tables 421 Springer Contents Part I Getting Started 1 Foundations of Matrix Analysis 3 1.1 Vector
Alfio Quarteroni Riccardo Sacco Fausto Saleri Numerical Mathematics Second Edition With 135 Figures and 45 Tables 421 Springer Contents Part I Getting Started 1 Foundations of Matrix Analysis 3 1.1 Vector
2tdt 1 y = t2 + C y = which implies C = 1 and the solution is y = 1
 Lectures - Week 11 General First Order ODEs & Numerical Methods for IVPs In general, nonlinear problems are much more difficult to solve than linear ones. Unfortunately many phenomena exhibit nonlinear
Lectures - Week 11 General First Order ODEs & Numerical Methods for IVPs In general, nonlinear problems are much more difficult to solve than linear ones. Unfortunately many phenomena exhibit nonlinear
Consistency and Convergence
 Jim Lambers MAT 77 Fall Semester 010-11 Lecture 0 Notes These notes correspond to Sections 1.3, 1.4 and 1.5 in the text. Consistency and Convergence We have learned that the numerical solution obtained
Jim Lambers MAT 77 Fall Semester 010-11 Lecture 0 Notes These notes correspond to Sections 1.3, 1.4 and 1.5 in the text. Consistency and Convergence We have learned that the numerical solution obtained
Lösning: Tenta Numerical Analysis för D, L. FMN011,
 Lösning: Tenta Numerical Analysis för D, L. FMN011, 090527 This exam starts at 8:00 and ends at 12:00. To get a passing grade for the course you need 35 points in this exam and an accumulated total (this
Lösning: Tenta Numerical Analysis för D, L. FMN011, 090527 This exam starts at 8:00 and ends at 12:00. To get a passing grade for the course you need 35 points in this exam and an accumulated total (this
PARTIAL DIFFERENTIAL EQUATIONS
 MATHEMATICAL METHODS PARTIAL DIFFERENTIAL EQUATIONS I YEAR B.Tech By Mr. Y. Prabhaker Reddy Asst. Professor of Mathematics Guru Nanak Engineering College Ibrahimpatnam, Hyderabad. SYLLABUS OF MATHEMATICAL
MATHEMATICAL METHODS PARTIAL DIFFERENTIAL EQUATIONS I YEAR B.Tech By Mr. Y. Prabhaker Reddy Asst. Professor of Mathematics Guru Nanak Engineering College Ibrahimpatnam, Hyderabad. SYLLABUS OF MATHEMATICAL
7. Response Surface Methodology (Ch.10. Regression Modeling Ch. 11. Response Surface Methodology)
") 7. Response Surface Methodology (Ch.10. Regression Modeling Ch. 11. Response Surface Methodology) Hae-Jin Choi School of Mechanical Engineering, Chung-Ang University 1 Introduction Response surface methodology,
7. Response Surface Methodology (Ch.10. Regression Modeling Ch. 11. Response Surface Methodology) Hae-Jin Choi School of Mechanical Engineering, Chung-Ang University 1 Introduction Response surface methodology,
Chap. 20: Initial-Value Problems
 Chap. 20: Initial-Value Problems Ordinary Differential Equations Goal: to solve differential equations of the form: dy dt f t, y The methods in this chapter are all one-step methods and have the general
Chap. 20: Initial-Value Problems Ordinary Differential Equations Goal: to solve differential equations of the form: dy dt f t, y The methods in this chapter are all one-step methods and have the general
Multistage Methods I: Runge-Kutta Methods
 Multistage Methods I: Runge-Kutta Methods Varun Shankar January, 0 Introduction Previously, we saw that explicit multistep methods (AB methods) have shrinking stability regions as their orders are increased.
Multistage Methods I: Runge-Kutta Methods Varun Shankar January, 0 Introduction Previously, we saw that explicit multistep methods (AB methods) have shrinking stability regions as their orders are increased.
NUMERICAL METHODS FOR ENGINEERING APPLICATION
 NUMERICAL METHODS FOR ENGINEERING APPLICATION Second Edition JOEL H. FERZIGER A Wiley-Interscience Publication JOHN WILEY & SONS, INC. New York / Chichester / Weinheim / Brisbane / Singapore / Toronto
NUMERICAL METHODS FOR ENGINEERING APPLICATION Second Edition JOEL H. FERZIGER A Wiley-Interscience Publication JOHN WILEY & SONS, INC. New York / Chichester / Weinheim / Brisbane / Singapore / Toronto
An Overly Simplified and Brief Review of Differential Equation Solution Methods. 1. Some Common Exact Solution Methods for Differential Equations
 An Overly Simplified and Brief Review of Differential Equation Solution Methods We will be dealing with initial or boundary value problems. A typical initial value problem has the form y y 0 y(0) 1 A typical
An Overly Simplified and Brief Review of Differential Equation Solution Methods We will be dealing with initial or boundary value problems. A typical initial value problem has the form y y 0 y(0) 1 A typical
Numerical Analysis. Introduction to. Rostam K. Saeed Karwan H.F. Jwamer Faraidun K. Hamasalh
 Iraq Kurdistan Region Ministry of Higher Education and Scientific Research University of Sulaimani Faculty of Science and Science Education School of Science Education-Mathematics Department Introduction
Iraq Kurdistan Region Ministry of Higher Education and Scientific Research University of Sulaimani Faculty of Science and Science Education School of Science Education-Mathematics Department Introduction
M.SC. PHYSICS - II YEAR
 MANONMANIAM SUNDARANAR UNIVERSITY DIRECTORATE OF DISTANCE & CONTINUING EDUCATION TIRUNELVELI 627012, TAMIL NADU M.SC. PHYSICS - II YEAR DKP26 - NUMERICAL METHODS (From the academic year 2016-17) Most Student
MANONMANIAM SUNDARANAR UNIVERSITY DIRECTORATE OF DISTANCE & CONTINUING EDUCATION TIRUNELVELI 627012, TAMIL NADU M.SC. PHYSICS - II YEAR DKP26 - NUMERICAL METHODS (From the academic year 2016-17) Most Student
Introduction to Numerical Analysis
 Introduction to Numerical Analysis S. Baskar and S. Sivaji Ganesh Department of Mathematics Indian Institute of Technology Bombay Powai, Mumbai 400 076. Introduction to Numerical Analysis Lecture Notes
Introduction to Numerical Analysis S. Baskar and S. Sivaji Ganesh Department of Mathematics Indian Institute of Technology Bombay Powai, Mumbai 400 076. Introduction to Numerical Analysis Lecture Notes
Chapter 4: Interpolation and Approximation. October 28, 2005
 Chapter 4: Interpolation and Approximation October 28, 2005 Outline 1 2.4 Linear Interpolation 2 4.1 Lagrange Interpolation 3 4.2 Newton Interpolation and Divided Differences 4 4.3 Interpolation Error
Chapter 4: Interpolation and Approximation October 28, 2005 Outline 1 2.4 Linear Interpolation 2 4.1 Lagrange Interpolation 3 4.2 Newton Interpolation and Divided Differences 4 4.3 Interpolation Error
EXAMPLE OF ONE-STEP METHOD
 EXAMPLE OF ONE-STEP METHOD Consider solving y = y cos x, y(0) = 1 Imagine writing a Taylor series for the solution Y (x), say initially about x = 0. Then Y (h) = Y (0) + hy (0) + h2 2 Y (0) + h3 6 Y (0)
EXAMPLE OF ONE-STEP METHOD Consider solving y = y cos x, y(0) = 1 Imagine writing a Taylor series for the solution Y (x), say initially about x = 0. Then Y (h) = Y (0) + hy (0) + h2 2 Y (0) + h3 6 Y (0)
Ch. 03 Numerical Quadrature. Andrea Mignone Physics Department, University of Torino AA
 Ch. 03 Numerical Quadrature Andrea Mignone Physics Department, University of Torino AA 2017-2018 Numerical Quadrature In numerical analysis quadrature refers to the computation of definite integrals. y
Ch. 03 Numerical Quadrature Andrea Mignone Physics Department, University of Torino AA 2017-2018 Numerical Quadrature In numerical analysis quadrature refers to the computation of definite integrals. y
Bindel, Spring 2012 Intro to Scientific Computing (CS 3220) Week 12: Monday, Apr 16. f(x) dx,
 Week 12: Monday, Apr 16. f(x) dx,") Panel integration Week 12: Monday, Apr 16 Suppose we want to compute the integral b a f(x) dx In estimating a derivative, it makes sense to use a locally accurate approximation to the function around the
Panel integration Week 12: Monday, Apr 16 Suppose we want to compute the integral b a f(x) dx In estimating a derivative, it makes sense to use a locally accurate approximation to the function around the
Examination paper for TMA4215 Numerical Mathematics
 Department of Mathematical Sciences Examination paper for TMA425 Numerical Mathematics Academic contact during examination: Trond Kvamsdal Phone: 93058702 Examination date: 6th of December 207 Examination
Department of Mathematical Sciences Examination paper for TMA425 Numerical Mathematics Academic contact during examination: Trond Kvamsdal Phone: 93058702 Examination date: 6th of December 207 Examination
A THEORETICAL INTRODUCTION TO NUMERICAL ANALYSIS
 A THEORETICAL INTRODUCTION TO NUMERICAL ANALYSIS Victor S. Ryaben'kii Semyon V. Tsynkov Chapman &. Hall/CRC Taylor & Francis Group Boca Raton London New York Chapman & Hall/CRC is an imprint of the Taylor
A THEORETICAL INTRODUCTION TO NUMERICAL ANALYSIS Victor S. Ryaben'kii Semyon V. Tsynkov Chapman &. Hall/CRC Taylor & Francis Group Boca Raton London New York Chapman & Hall/CRC is an imprint of the Taylor
INTERPOLATION. and y i = cos x i, i = 0, 1, 2 This gives us the three points. Now find a quadratic polynomial. p(x) = a 0 + a 1 x + a 2 x 2.
 = a 0 + a 1 x + a 2 x 2.") INTERPOLATION Interpolation is a process of finding a formula (often a polynomial) whose graph will pass through a given set of points (x, y). As an example, consider defining and x 0 = 0, x 1 = π/4, x
INTERPOLATION Interpolation is a process of finding a formula (often a polynomial) whose graph will pass through a given set of points (x, y). As an example, consider defining and x 0 = 0, x 1 = π/4, x
Integration of Ordinary Differential Equations
 Integration of Ordinary Differential Equations Com S 477/577 Nov 7, 00 1 Introduction The solution of differential equations is an important problem that arises in a host of areas. Many differential equations
Integration of Ordinary Differential Equations Com S 477/577 Nov 7, 00 1 Introduction The solution of differential equations is an important problem that arises in a host of areas. Many differential equations
Correlation Analysis
 Simple Regression Correlation Analysis Correlation analysis is used to measure strength of the association (linear relationship) between two variables Correlation is only concerned with strength of the
Simple Regression Correlation Analysis Correlation analysis is used to measure strength of the association (linear relationship) between two variables Correlation is only concerned with strength of the
Exam in TMA4215 December 7th 2012
 Norwegian University of Science and Technology Department of Mathematical Sciences Page of 9 Contact during the exam: Elena Celledoni, tlf. 7359354, cell phone 48238584 Exam in TMA425 December 7th 22 Allowed
Norwegian University of Science and Technology Department of Mathematical Sciences Page of 9 Contact during the exam: Elena Celledoni, tlf. 7359354, cell phone 48238584 Exam in TMA425 December 7th 22 Allowed
CS 450 Numerical Analysis. Chapter 9: Initial Value Problems for Ordinary Differential Equations
 Lecture slides based on the textbook Scientific Computing: An Introductory Survey by Michael T. Heath, copyright c 2018 by the Society for Industrial and Applied Mathematics. http://www.siam.org/books/cl80
Lecture slides based on the textbook Scientific Computing: An Introductory Survey by Michael T. Heath, copyright c 2018 by the Society for Industrial and Applied Mathematics. http://www.siam.org/books/cl80
Chap. 19: Numerical Differentiation
 Chap. 19: Numerical Differentiation Differentiation Definition of difference: y x f x x i x f x i As x is approaching zero, the difference becomes a derivative: dy dx lim x 0 f x i x f x i x 2 High-Accuracy
Chap. 19: Numerical Differentiation Differentiation Definition of difference: y x f x x i x f x i As x is approaching zero, the difference becomes a derivative: dy dx lim x 0 f x i x f x i x 2 High-Accuracy
Optimization. Escuela de Ingeniería Informática de Oviedo. (Dpto. de Matemáticas-UniOvi) Numerical Computation Optimization 1 / 30
 Numerical Computation Optimization 1 / 30") Optimization Escuela de Ingeniería Informática de Oviedo (Dpto. de Matemáticas-UniOvi) Numerical Computation Optimization 1 / 30 Unconstrained optimization Outline 1 Unconstrained optimization 2 Constrained
Optimization Escuela de Ingeniería Informática de Oviedo (Dpto. de Matemáticas-UniOvi) Numerical Computation Optimization 1 / 30 Unconstrained optimization Outline 1 Unconstrained optimization 2 Constrained
The Definition and Numerical Method of Final Value Problem and Arbitrary Value Problem Shixiong Wang 1*, Jianhua He 1, Chen Wang 2, Xitong Li 1
 The Definition and Numerical Method of Final Value Problem and Arbitrary Value Problem Shixiong Wang 1*, Jianhua He 1, Chen Wang 2, Xitong Li 1 1 School of Electronics and Information, Northwestern Polytechnical
The Definition and Numerical Method of Final Value Problem and Arbitrary Value Problem Shixiong Wang 1*, Jianhua He 1, Chen Wang 2, Xitong Li 1 1 School of Electronics and Information, Northwestern Polytechnical
SOLUTION OF EQUATION AND EIGENVALUE PROBLEMS PART A( 2 MARKS)
") CHENDU COLLEGE OF ENGINEERING AND TECHNOLOGY (Approved by AICTE New Delhi, Affiliated to Anna University Chennai. Zamin Endathur Village, Madurntakam Taluk, Kancheepuram Dist.-603311.) MA6459 - NUMERICAL
CHENDU COLLEGE OF ENGINEERING AND TECHNOLOGY (Approved by AICTE New Delhi, Affiliated to Anna University Chennai. Zamin Endathur Village, Madurntakam Taluk, Kancheepuram Dist.-603311.) MA6459 - NUMERICAL
Numerical Methods. Scientists. Engineers
 Third Edition Numerical Methods for Scientists and Engineers K. Sankara Rao Numerical Methods for Scientists and Engineers Numerical Methods for Scientists and Engineers Third Edition K. SANKARA RAO Formerly,
Third Edition Numerical Methods for Scientists and Engineers K. Sankara Rao Numerical Methods for Scientists and Engineers Numerical Methods for Scientists and Engineers Third Edition K. SANKARA RAO Formerly,
Romberg Integration and Gaussian Quadrature
 Romberg Integration and Gaussian Quadrature P. Sam Johnson October 17, 014 P. Sam Johnson (NITK) Romberg Integration and Gaussian Quadrature October 17, 014 1 / 19 Overview We discuss two methods for integration.
Romberg Integration and Gaussian Quadrature P. Sam Johnson October 17, 014 P. Sam Johnson (NITK) Romberg Integration and Gaussian Quadrature October 17, 014 1 / 19 Overview We discuss two methods for integration.
Ordinary Differential Equations
 CHAPTER 8 Ordinary Differential Equations 8.1. Introduction My section 8.1 will cover the material in sections 8.1 and 8.2 in the book. Read the book sections on your own. I don t like the order of things
CHAPTER 8 Ordinary Differential Equations 8.1. Introduction My section 8.1 will cover the material in sections 8.1 and 8.2 in the book. Read the book sections on your own. I don t like the order of things
Final Year M.Sc., Degree Examinations
 QP CODE 569 Page No Final Year MSc, Degree Examinations September / October 5 (Directorate of Distance Education) MATHEMATICS Paper PM 5: DPB 5: COMPLEX ANALYSIS Time: 3hrs] [Max Marks: 7/8 Instructions
QP CODE 569 Page No Final Year MSc, Degree Examinations September / October 5 (Directorate of Distance Education) MATHEMATICS Paper PM 5: DPB 5: COMPLEX ANALYSIS Time: 3hrs] [Max Marks: 7/8 Instructions
Ordinary differential equation II
 Ordinary Differential Equations ISC-5315 1 Ordinary differential equation II 1 Some Basic Methods 1.1 Backward Euler method (implicit method) The algorithm looks like this: y n = y n 1 + hf n (1) In contrast
Ordinary Differential Equations ISC-5315 1 Ordinary differential equation II 1 Some Basic Methods 1.1 Backward Euler method (implicit method) The algorithm looks like this: y n = y n 1 + hf n (1) In contrast
Numerical Methods for Engineers
 Numerical Methods for Engineers SEVENTH EDITION Steven C Chopra Berger Chair in Computing and Engineering Tufts University Raymond P. Canal Professor Emeritus of Civil Engineering of Michiaan University
Numerical Methods for Engineers SEVENTH EDITION Steven C Chopra Berger Chair in Computing and Engineering Tufts University Raymond P. Canal Professor Emeritus of Civil Engineering of Michiaan University
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 6 Chapter 20 Initial-Value Problems PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 6 Chapter 20 Initial-Value Problems PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
INSTITUTE OF AERONAUTICAL ENGINEERING Dundigal, Hyderabad MECHANICAL ENGINEERING TUTORIAL QUESTION BANK
 Course Name Course Code Class Branch INSTITUTE OF AERONAUTICAL ENGINEERING Dundigal, Hyderabad - 500 043 Mathematics-II A30006 II-I B. Tech Freshman Engineering Year 016 017 Course Faculty MECHANICAL ENGINEERING
Course Name Course Code Class Branch INSTITUTE OF AERONAUTICAL ENGINEERING Dundigal, Hyderabad - 500 043 Mathematics-II A30006 II-I B. Tech Freshman Engineering Year 016 017 Course Faculty MECHANICAL ENGINEERING
INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad
 Dundigal, Hyderabad") 1 P a g e INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad - 500 04 Name : Mathematics-II Code : A0006 Class : II B. Tech I Semester Branch : CIVIL Year : 016 017 FRESHMAN ENGINEERING
1 P a g e INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad - 500 04 Name : Mathematics-II Code : A0006 Class : II B. Tech I Semester Branch : CIVIL Year : 016 017 FRESHMAN ENGINEERING
8.1 Introduction. Consider the initial value problem (IVP):
:") 8.1 Introduction Consider the initial value problem (IVP): y dy dt = f(t, y), y(t 0)=y 0, t 0 t T. Geometrically: solutions are a one parameter family of curves y = y(t) in(t, y)-plane. Assume solution
8.1 Introduction Consider the initial value problem (IVP): y dy dt = f(t, y), y(t 0)=y 0, t 0 t T. Geometrically: solutions are a one parameter family of curves y = y(t) in(t, y)-plane. Assume solution
Fourth Order RK-Method
 Fourth Order RK-Method The most commonly used method is Runge-Kutta fourth order method. The fourth order RK-method is y i+1 = y i + 1 6 (k 1 + 2k 2 + 2k 3 + k 4 ), Ordinary Differential Equations (ODE)
Fourth Order RK-Method The most commonly used method is Runge-Kutta fourth order method. The fourth order RK-method is y i+1 = y i + 1 6 (k 1 + 2k 2 + 2k 3 + k 4 ), Ordinary Differential Equations (ODE)
Mathematics for Engineers. Numerical mathematics
 Mathematics for Engineers Numerical mathematics Integers Determine the largest representable integer with the intmax command. intmax ans = int32 2147483647 2147483647+1 ans = 2.1475e+09 Remark The set
Mathematics for Engineers Numerical mathematics Integers Determine the largest representable integer with the intmax command. intmax ans = int32 2147483647 2147483647+1 ans = 2.1475e+09 Remark The set
8 Numerical methods for unconstrained problems
 8 Numerical methods for unconstrained problems Optimization is one of the important fields in numerical computation, beside solving differential equations and linear systems. We can see that these fields
8 Numerical methods for unconstrained problems Optimization is one of the important fields in numerical computation, beside solving differential equations and linear systems. We can see that these fields
Scientific Computing
 2301678 Scientific Computing Chapter 2 Interpolation and Approximation Paisan Nakmahachalasint Paisan.N@chula.ac.th Chapter 2 Interpolation and Approximation p. 1/66 Contents 1. Polynomial interpolation
2301678 Scientific Computing Chapter 2 Interpolation and Approximation Paisan Nakmahachalasint Paisan.N@chula.ac.th Chapter 2 Interpolation and Approximation p. 1/66 Contents 1. Polynomial interpolation
USHA RAMA COLLEGE OF ENGINEERING & TECHNOLOGY
 Code No: R007/R0 Set No. I B.Tech I Semester Supplementary Examinations, Feb/Mar 04 MATHEMATICAL METHODS ( Common to Civil Engineering, Electrical & Electronics Engineering, Computer Science & Engineering,
Code No: R007/R0 Set No. I B.Tech I Semester Supplementary Examinations, Feb/Mar 04 MATHEMATICAL METHODS ( Common to Civil Engineering, Electrical & Electronics Engineering, Computer Science & Engineering,
AIMS Exercise Set # 1
 AIMS Exercise Set #. Determine the form of the single precision floating point arithmetic used in the computers at AIMS. What is the largest number that can be accurately represented? What is the smallest
AIMS Exercise Set #. Determine the form of the single precision floating point arithmetic used in the computers at AIMS. What is the largest number that can be accurately represented? What is the smallest