Chapter 5 Roots of Equations: Bracketing Models. Gab-Byung Chae
|
|
|
- Holly Stone
- 5 years ago
- Views:
Transcription
1 Chapter 5 Roots of Equations: Bracketing Models Gab-Byung Chae
2 2 Chapter Objectives Studying Bracketing Methods Understanding what roots problems are and where they occur in engineering and science. Knowing how to determine a root graphically. Understanding the incremental search method and its shortcoming. Knowing how to solve a roots problem with the bisection method. Knowing how to estimate the error of bisection Understanding false position and how it differs from bisection. You ve got a problem A bungee jumper s chances of sustaining a significant vertebrae injury increase significantly if the free-fall velocity exceeds 36m/s after 4 s of free fall. ( ) gm gcd v(t) = tanh m t Can you solve this equation when c d = 0.25kg/m for the mass? c d An alternative way of looking at the problem involves subtracting v(t) from both sides to give a new function: gm f(m) = c d (1) ( ) gcd tanh m t v(t) (2) Now we can see that the answer to the problem is the value of m that makes the function equal to zero. Hence we call this a roots problem. 5.1 INTRODUCTION AND BACKGROUND What Are Roots? Quadratic formula x = b ± b 2 4ac 2a (3)
3 3 to solve f(x) = ax 2 + bx + c = 0 (4) Roots of Equations and Engineering Practice Eq.(1) can be used to predict the jumper s velocity. Such computations can be performed directly because v is expressed explicitly as a function of the model parameters. Suppose we had to determine the mass for a jumper with a given drag coefficient to attain a prescribed velocity in a set time period. Eq.(1) cannot be solved explicitly for mass. In such cases, m is said to be implicit. The solution to the implicit equations is provided by numerical methods for roots of equations as in Eq.(2) 5.2 GRAPHICAL METHODS Example 0.1 The Graphical Approach Use the graphical approach to determine the mass of the bungee jumper with a drag coefficient of 0.25kg/m to have a velocity of 36m/s after 4 s of free fall. The acceleration of gravity is 9.81m/s 2. Solution >> cd = 0.25; g = 9.81; v = 36; t = 4; >> mp = linspace(50,200);
 to yield >> sqrt(g*145/cd).*tanh(sqrt(g*cd./145)*t) ans = 36.")
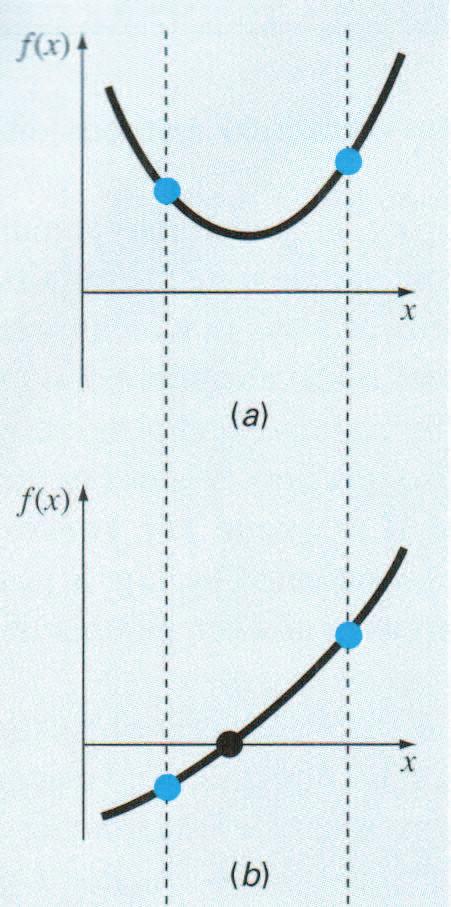
4 4 >> fp = sqrt(g*mp/cd).*tanh(sqrt(g*cd./mp)*t)-v; >> plot(mp,fp),grid The function crosses the m axis between 140 and 150kg. The validity of the graphical estimate can be checked by substituting it into Eq.(2) to yield >> sqrt(g*145/cd).*tanh(sqrt(g*cd./145)*t) ans = which is close to the desired fall velocity of 36m/s. Graphical methods can be utilized to obtain rough estimates of roots. These estimates can be employed as starting guesses for numerical methods discussed in this chapter. Figure 5.1 shows a number of ways in which roots can occur (or absent ) in an interval. 5.3 BRACKETING METHODS AND INITIAL GUESSES Trial and Error : You should repeatedly make guesses until the function is sufficiently close to zero.


5 5
6 6 The two major classes of methods available are distinguished by the type of initial guess. Bracketing methods. As the name implies, these are based on two initial guesses that bracket the root-that is, are on either side of the root. Open methods. These methods can involve one or more initial guesses, but there is no need for them to bracket the root. The bracketing methods work but converge slowly. The open methods do not always work, but when they do they usually converge quicker. In both cases, initial guesses are required. How to make a good initial guess? The following section describes one such approach, the incremental search Incremental Search You observed that f(x) changed sign on opposite sides of the root. In general, f(x) is real and continuous in the interval from x l to x u and f(x l ) and f(x u ) have opposite signs, that is, f(x l )f(x u ) < 0 then there is at least one real root between x l and x u. Incremental search methods capitalize on this observation by locating an interval where the function changes sign. An M-file can be developed that implements an incremental search to locate the roots of a function func within the range from xmin to xmax. ns : the number of intervals within the range. (default is 50) function xb = incsearch(func, xmin, xmax,ns ) % incsearch(func, xmin, xmax,ns ): % find brackets of x that contain sign changes of % a function on an interval % input: % func = name of function
7 7 % xmin, xmax = endpoints of interval % ns = (optional) number of subintervals along x % used to search for brackets %output: % xb(k,1) is the lower bound of the kth sign change % xb(k,2) is the upper bound of the kth sign change % If no brackets found, xb = []. if nargin < 4, ns = 50 ; end % if ns blank set to 50 % Incremental search x = linspace(xmin,xmax,ns); f = feval(func,x); nb = 0; xb=[ ]; %xb is null unless sign change detected for k =1 : length(x) -1 if sign(f(k)) ~= sign(f(k+1)) % check for sign change nb = nb + 1; xb(nb,1) = x(k); xb(nb,2) = x(k+1); end end if isempty(xb) % display that no brackets were found disp( no brackets found ) disp( check interval or increase ns ) else disp( number of brackets: ) % display number of brackets disp(nb) end Example 0.2 Use the M-file incsearch to identify brackets within the inter-
![8 val [3, 6] for the function: f(x) = sin(10x) + cos(3x) Solution >> incsearch( inline( sin(10*x) +cos(3*x) ),3,6) number of brackets: 5 ans =](/docs-images/87/95044865/images/8-0.jpg "3.2449 3.3061 3.3061 3.3673 3.7347 3.7959 4.6531 4.7143 5.6327 5.6939 >> incsearch( inline( sin(10*x) +cos(3*x) ),3,6,100) number of brackets:")
8 8 val [3, 6] for the function: f(x) = sin(10x) + cos(3x) Solution >> incsearch( inline( sin(10*x) +cos(3*x) ),3,6) number of brackets: 5 ans = >> incsearch( inline( sin(10*x) +cos(3*x) ),3,6,100) number of brackets:

9 9 9 ans = BISECTION The bisection method is a variation of the incremental search method in which the interval in the ith iteration is always divided in half in (i + 1)th iteration.
.")
10 10 Example 0.3 The Bisection Method Use bisection to solve the same problem approached graphically in Example 5.1 Solution From the graphical solution in Example 5.1, we can see that the function changes sign between values of 50 and 200(Let s assume). Therefore, the initial estimate of the root x r lies at the midpoint of the interval x r = = 125 Next we compute the product of the function value at the lower bound and at the midpoint : f(50)f(125) = 4.579( 0.409) = > 0 which means that the root must be located in the upper interval between 125 and 200. The new interval extends from x l = 125 to x u = 200. x r = = And f(125)f(162.5) = 0.409(0.359) = < 0
11 11 Therefore, the root is now in the lower interval between 125 and The upper bound is redefined as and the root estimate for the third iteration is calculated as x r = = which represent a percent relative error of ε t = % = 0.709% The method can be repeated until the result is accurate enough to satisfy your needs. But how? We do not know the true value!! So we use an approximate percent relative error as in Eq.(4.5) ε a = where x new r previous iteration. Example 0.4 x new r x old r x new r is the root for the present iteration and x old r Error Estimate for Bisection 100% (5) is the root from the Continue Example 5.3 until the approximate error falls below a stopping criterion of ε s = 0.5%. Use Eq.(5) to compute the errors. Solution The results for the first two iterations for Example 5.3 were 125 and By Eq.(5) ε a = % = 23.08% After eight iterations ε a finally falls below ε s = 0.5%, and the computation can be terminated. The Fig.5.6 exhibits the extremely attractive characteristic that ε a is always greater than ε t (generally this is true for bisection, Why?). Thus, when ε a falls

12 12 below ε s, the computation could be terminated with confidence that the root is known to be at least as accurate as the prespecified acceptable level. This is the one benefit of the bisection. Another benefit of the bisection : The number of iterations required to attain an absolute error can be computed a priori MATLAB M-file : bisection function root = bisection(func, xl, xu, es, maxit ) % bisection(func, xl, xu, es, maxit ): % use bisection method to find the root of a function % input: % func = name of function % xl, xu = lower and upper guesses % es = (optional) stopping criterion (%) % maxit = (optional) maximum allowable iterations %output: % rooot = real root if func(xl)*func(xu) >0 error( no bracket ) %if guesses do not bracket a sign %change, display an error message
13 13 end return %and terminate %if necessary, assign default values if nargin < 5, maxit = 50 ; end %if maxit blank set to 50 if nargin < 4, es = 0.001; end %if es blank set to % bisection iter =0; xr = xl; while (1) xrold = xr; xr = (xl + xu)/2; iter = iter + 1 ; if xr~= 0, ea = abs((xr - xrold)/xr)* 100; end test = func(xl)*func(xr); if test < 0 xu = xr ; elseif test > 0 xl = xr; else ea = 0 ; end if ea <= es iter >= maxit, break, end end root = xr; 5.5 FALSE POSITION False position(also called the linear interpolation method) is another wellknown bracketing method. It uses a different strategy to come up with its new root estimate.
 : f(x u ) = (x r x l ) : (x u x r ) or Therefore x r = f(x l)x u f(x u )x l f(x l ) f(x u ) x r = x u f(x u)(x l x u ) f(x l ) f(x u ) This is the")
14 14 It locates the root by joining f(x l ) and f(x u ) with a straight line(see Figure). The intersection of this line with the x axis represents an improved estimate of the root. Using similar triangles, we have f(x l ) : f(x u ) = (x r x l ) : (x u x r ) or Therefore x r = f(x l)x u f(x u )x l f(x l ) f(x u ) x r = x u f(x u)(x l x u ) f(x l ) f(x u ) This is the false-position formula. The value of x r computed with Eq.(6) then replaces whichever of the two initial guesses, x l or x u, yields a function value with the same sign as f(x r ). (HOMEWORK : implement false-position method using MATLAB) Example 0.5 The False-Position Method Use false position to solve the same problem approached graphically and with bisection in Example 5.1 and 5.3. Solution (6)
15 15 With initial guesses x l = 50 and x u = 200 First iteration : x r = 200 which has a true relative error of 23.5%. Second iteration : x l = 50 f(x l ) = x u = 200 f(x u ) = (50 200) = f(x l )f(x r ) = Therefore, the root lies in the first subinterval, and x r becomes the upper limit for the next iteration, x u = x r = x l = 50 f(x l ) = x u = f(x u ) = ( ) = which has a true and approximate relative errors of 13.76% and 8.56%, respectively. False position method often performs better than bisection, but not always. Example 0.6 A Case Where Bisection Is Preferable to False Position f(x) = x 10 1 between x = 0 and 1.3. Bisection : False position: See Figure 5.9

16 16
Numerical Methods School of Mechanical Engineering Chung-Ang University
 Part 2 Chapter 5 Roots: Bracketing Methods Prof. Hae-Jin Choi hjchoi@cau.ac.kr 1 Overview of Part 2 l To find the roots of general second order polynomial, the quadratic formula is used b b 2 2 - ± - 4ac
Part 2 Chapter 5 Roots: Bracketing Methods Prof. Hae-Jin Choi hjchoi@cau.ac.kr 1 Overview of Part 2 l To find the roots of general second order polynomial, the quadratic formula is used b b 2 2 - ± - 4ac
Q. 의학연구에의하면 4초후에낙하속도가 36 m/s를초과하면척추손상을입을가능성이높다. 항력계수가 kg/m 로주어질때이러한판정기준이초과하는질량을구하시오.
 수치해석 161009 Ch5. Roots: Bracketing Methods 1 앞의낙하속도문제에서 v( t) gm gcd = tanh t c d m Q. 의학연구에의하면 4초후에낙하속도가 36 m/s를초과하면척추손상을입을가능성이높다. 항력계수가 0.25 kg/m 로주어질때이러한판정기준이초과하는질량을구하시오. gm gc d f( m) = tanh t v( t)
수치해석 161009 Ch5. Roots: Bracketing Methods 1 앞의낙하속도문제에서 v( t) gm gcd = tanh t c d m Q. 의학연구에의하면 4초후에낙하속도가 36 m/s를초과하면척추손상을입을가능성이높다. 항력계수가 0.25 kg/m 로주어질때이러한판정기준이초과하는질량을구하시오. gm gc d f( m) = tanh t v( t)
Therefore, the root is in the second interval and the lower guess is redefined as x l = The second iteration is
 1 CHAPTER 5 5.1 The function to evaluate is gm gc d f ( cd ) tanh t v( t) c d m or substituting the given values 9.81(65) 9.81 ( ) tanh cd f c 4.5 d 35 c 65 d The first iteration is. +.3.5 f (.) f (.5)
1 CHAPTER 5 5.1 The function to evaluate is gm gc d f ( cd ) tanh t v( t) c d m or substituting the given values 9.81(65) 9.81 ( ) tanh cd f c 4.5 d 35 c 65 d The first iteration is. +.3.5 f (.) f (.5)
Bisection and False Position Dr. Marco A. Arocha Aug, 2014
 Bisection and False Position Dr. Marco A. Arocha Aug, 2014 1 Given function f, we seek x values for which f(x)=0 Solution x is the root of the equation or zero of the function f Problem is known as root
Bisection and False Position Dr. Marco A. Arocha Aug, 2014 1 Given function f, we seek x values for which f(x)=0 Solution x is the root of the equation or zero of the function f Problem is known as root
Root Finding: Close Methods. Bisection and False Position Dr. Marco A. Arocha Aug, 2014
 Root Finding: Close Methods Bisection and False Position Dr. Marco A. Arocha Aug, 2014 1 Roots Given function f(x), we seek x values for which f(x)=0 Solution x is the root of the equation or zero of the
Root Finding: Close Methods Bisection and False Position Dr. Marco A. Arocha Aug, 2014 1 Roots Given function f(x), we seek x values for which f(x)=0 Solution x is the root of the equation or zero of the
CHAPTER 4 ROOTS OF EQUATIONS
 CHAPTER 4 ROOTS OF EQUATIONS Chapter 3 : TOPIC COVERS (ROOTS OF EQUATIONS) Definition of Root of Equations Bracketing Method Graphical Method Bisection Method False Position Method Open Method One-Point
CHAPTER 4 ROOTS OF EQUATIONS Chapter 3 : TOPIC COVERS (ROOTS OF EQUATIONS) Definition of Root of Equations Bracketing Method Graphical Method Bisection Method False Position Method Open Method One-Point
Scientific Computing. Roots of Equations
 ECE257 Numerical Methods and Scientific Computing Roots of Equations Today s s class: Roots of Equations Bracketing Methods Roots of Equations Given a function f(x), the roots are those values of x that
ECE257 Numerical Methods and Scientific Computing Roots of Equations Today s s class: Roots of Equations Bracketing Methods Roots of Equations Given a function f(x), the roots are those values of x that
Today s class. Numerical differentiation Roots of equation Bracketing methods. Numerical Methods, Fall 2011 Lecture 4. Prof. Jinbo Bi CSE, UConn
 Today s class Numerical differentiation Roots of equation Bracketing methods 1 Numerical Differentiation Finite divided difference First forward difference First backward difference Lecture 3 2 Numerical
Today s class Numerical differentiation Roots of equation Bracketing methods 1 Numerical Differentiation Finite divided difference First forward difference First backward difference Lecture 3 2 Numerical
Numerical Methods. Roots of Equations
 Roots of Equations by Norhayati Rosli & Nadirah Mohd Nasir Faculty of Industrial Sciences & Technology norhayati@ump.edu.my, nadirah@ump.edu.my Description AIMS This chapter is aimed to compute the root(s)
Roots of Equations by Norhayati Rosli & Nadirah Mohd Nasir Faculty of Industrial Sciences & Technology norhayati@ump.edu.my, nadirah@ump.edu.my Description AIMS This chapter is aimed to compute the root(s)
cha1873x_p02.qxd 3/21/05 1:01 PM Page 104 PART TWO
 cha1873x_p02.qxd 3/21/05 1:01 PM Page 104 PART TWO ROOTS OF EQUATIONS PT2.1 MOTIVATION Years ago, you learned to use the quadratic formula x = b ± b 2 4ac 2a to solve f(x) = ax 2 + bx + c = 0 (PT2.1) (PT2.2)
cha1873x_p02.qxd 3/21/05 1:01 PM Page 104 PART TWO ROOTS OF EQUATIONS PT2.1 MOTIVATION Years ago, you learned to use the quadratic formula x = b ± b 2 4ac 2a to solve f(x) = ax 2 + bx + c = 0 (PT2.1) (PT2.2)
Computational Methods for Engineers Programming in Engineering Problem Solving
 Computational Methods for Engineers Programming in Engineering Problem Solving Abu Hasan Abdullah January 6, 2009 Abu Hasan Abdullah 2009 An Engineering Problem Problem Statement: The length of a belt
Computational Methods for Engineers Programming in Engineering Problem Solving Abu Hasan Abdullah January 6, 2009 Abu Hasan Abdullah 2009 An Engineering Problem Problem Statement: The length of a belt
MATH 3795 Lecture 12. Numerical Solution of Nonlinear Equations.
 MATH 3795 Lecture 12. Numerical Solution of Nonlinear Equations. Dmitriy Leykekhman Fall 2008 Goals Learn about different methods for the solution of f(x) = 0, their advantages and disadvantages. Convergence
MATH 3795 Lecture 12. Numerical Solution of Nonlinear Equations. Dmitriy Leykekhman Fall 2008 Goals Learn about different methods for the solution of f(x) = 0, their advantages and disadvantages. Convergence
Numerical Solution of f(x) = 0
 = 0") Numerical Solution of f(x) = 0 Gerald W. Recktenwald Department of Mechanical Engineering Portland State University gerry@pdx.edu ME 350: Finding roots of f(x) = 0 Overview Topics covered in these slides
Numerical Solution of f(x) = 0 Gerald W. Recktenwald Department of Mechanical Engineering Portland State University gerry@pdx.edu ME 350: Finding roots of f(x) = 0 Overview Topics covered in these slides
Numerical Methods Lecture 3
 Numerical Methods Lecture 3 Nonlinear Equations by Pavel Ludvík Introduction Definition (Root or zero of a function) A root (or a zero) of a function f is a solution of an equation f (x) = 0. We learn
Numerical Methods Lecture 3 Nonlinear Equations by Pavel Ludvík Introduction Definition (Root or zero of a function) A root (or a zero) of a function f is a solution of an equation f (x) = 0. We learn
Finding the Roots of f(x) = 0. Gerald W. Recktenwald Department of Mechanical Engineering Portland State University
 = 0. Gerald W. Recktenwald Department of Mechanical Engineering Portland State University") Finding the Roots of f(x) = 0 Gerald W. Recktenwald Department of Mechanical Engineering Portland State University gerry@me.pdx.edu These slides are a supplement to the book Numerical Methods with Matlab:
Finding the Roots of f(x) = 0 Gerald W. Recktenwald Department of Mechanical Engineering Portland State University gerry@me.pdx.edu These slides are a supplement to the book Numerical Methods with Matlab:
Finding the Roots of f(x) = 0
 = 0") Finding the Roots of f(x) = 0 Gerald W. Recktenwald Department of Mechanical Engineering Portland State University gerry@me.pdx.edu These slides are a supplement to the book Numerical Methods with Matlab:
Finding the Roots of f(x) = 0 Gerald W. Recktenwald Department of Mechanical Engineering Portland State University gerry@me.pdx.edu These slides are a supplement to the book Numerical Methods with Matlab:
Math 551 Homework Assignment 3 Page 1 of 6
 Math 551 Homework Assignment 3 Page 1 of 6 Name and section: ID number: E-mail: 1. Consider Newton s method for finding + α with α > 0 by finding the positive root of f(x) = x 2 α = 0. Assuming that x
Math 551 Homework Assignment 3 Page 1 of 6 Name and section: ID number: E-mail: 1. Consider Newton s method for finding + α with α > 0 by finding the positive root of f(x) = x 2 α = 0. Assuming that x
TWO METHODS FOR OF EQUATIONS
 TWO METHODS FOR FINDING ROOTS OF EQUATIONS Closed (Bracketing) Methods Open Methods Motivation: i In engineering applications, it is often necessary to determine the rootofan of equation when a formula
TWO METHODS FOR FINDING ROOTS OF EQUATIONS Closed (Bracketing) Methods Open Methods Motivation: i In engineering applications, it is often necessary to determine the rootofan of equation when a formula
R x n. 2 R We simplify this algebraically, obtaining 2x n x n 1 x n x n
 Math 42 Homework 4. page 3, #9 This is a modification of the bisection method. Write a MATLAB function similar to bisect.m. Here, given the points P a a,f a and P b b,f b with f a f b,we compute the point
Math 42 Homework 4. page 3, #9 This is a modification of the bisection method. Write a MATLAB function similar to bisect.m. Here, given the points P a a,f a and P b b,f b with f a f b,we compute the point
Intro to Scientific Computing: How long does it take to find a needle in a haystack?
 Intro to Scientific Computing: How long does it take to find a needle in a haystack? Dr. David M. Goulet Intro Binary Sorting Suppose that you have a detector that can tell you if a needle is in a haystack,
Intro to Scientific Computing: How long does it take to find a needle in a haystack? Dr. David M. Goulet Intro Binary Sorting Suppose that you have a detector that can tell you if a needle is in a haystack,
Variable. Peter W. White Fall 2018 / Numerical Analysis. Department of Mathematics Tarleton State University
 Newton s Iterative s Peter W. White white@tarleton.edu Department of Mathematics Tarleton State University Fall 2018 / Numerical Analysis Overview Newton s Iterative s Newton s Iterative s Newton s Iterative
Newton s Iterative s Peter W. White white@tarleton.edu Department of Mathematics Tarleton State University Fall 2018 / Numerical Analysis Overview Newton s Iterative s Newton s Iterative s Newton s Iterative
Numerical Methods School of Mechanical Engineering Chung-Ang University
 Part 2 Chapter 7 Optimization Prof. Hae-Jin Choi hjchoi@cau.ac.kr 1 Chapter Objectives l Understanding why and where optimization occurs in engineering and scientific problem solving. l Recognizing the
Part 2 Chapter 7 Optimization Prof. Hae-Jin Choi hjchoi@cau.ac.kr 1 Chapter Objectives l Understanding why and where optimization occurs in engineering and scientific problem solving. l Recognizing the
6.1 The function can be set up for fixed-point iteration by solving it for x
 1 CHAPTER 6 6.1 The function can be set up for fied-point iteration by solving it for 1 sin i i Using an initial guess of 0 = 0.5, the first iteration yields 1 sin 0.5 0.649637 a 0.649637 0.5 100% 3% 0.649637
1 CHAPTER 6 6.1 The function can be set up for fied-point iteration by solving it for 1 sin i i Using an initial guess of 0 = 0.5, the first iteration yields 1 sin 0.5 0.649637 a 0.649637 0.5 100% 3% 0.649637
COURSE Iterative methods for solving linear systems
 COURSE 0 4.3. Iterative methods for solving linear systems Because of round-off errors, direct methods become less efficient than iterative methods for large systems (>00 000 variables). An iterative scheme
COURSE 0 4.3. Iterative methods for solving linear systems Because of round-off errors, direct methods become less efficient than iterative methods for large systems (>00 000 variables). An iterative scheme
CHAPTER-II ROOTS OF EQUATIONS
 CHAPTER-II ROOTS OF EQUATIONS 2.1 Introduction The roots or zeros of equations can be simply defined as the values of x that makes f(x) =0. There are many ways to solve for roots of equations. For some
CHAPTER-II ROOTS OF EQUATIONS 2.1 Introduction The roots or zeros of equations can be simply defined as the values of x that makes f(x) =0. There are many ways to solve for roots of equations. For some
Figure 1: Graph of y = x cos(x)
") Chapter The Solution of Nonlinear Equations f(x) = 0 In this chapter we will study methods for find the solutions of functions of single variables, ie values of x such that f(x) = 0 For example, f(x) =
Chapter The Solution of Nonlinear Equations f(x) = 0 In this chapter we will study methods for find the solutions of functions of single variables, ie values of x such that f(x) = 0 For example, f(x) =
What are Numerical Methods? (1/3)
") What are Numerical Methods? (1/3) Numerical methods are techniques by which mathematical problems are formulated so that they can be solved by arithmetic and logic operations Because computers excel at
What are Numerical Methods? (1/3) Numerical methods are techniques by which mathematical problems are formulated so that they can be solved by arithmetic and logic operations Because computers excel at
Lecture 7. Root finding I. 1 Introduction. 2 Graphical solution
 1 Introduction Lecture 7 Root finding I For our present purposes, root finding is the process of finding a real value of x which solves the equation f (x)=0. Since the equation g x =h x can be rewritten
1 Introduction Lecture 7 Root finding I For our present purposes, root finding is the process of finding a real value of x which solves the equation f (x)=0. Since the equation g x =h x can be rewritten
Curve Fitting. Objectives
 Curve Fitting Objectives Understanding the difference between regression and interpolation. Knowing how to fit curve of discrete with least-squares regression. Knowing how to compute and understand the
Curve Fitting Objectives Understanding the difference between regression and interpolation. Knowing how to fit curve of discrete with least-squares regression. Knowing how to compute and understand the
Numerical Methods. Root Finding
 Numerical Methods Solving Non Linear 1-Dimensional Equations Root Finding Given a real valued function f of one variable (say ), the idea is to find an such that: f() 0 1 Root Finding Eamples Find real
Numerical Methods Solving Non Linear 1-Dimensional Equations Root Finding Given a real valued function f of one variable (say ), the idea is to find an such that: f() 0 1 Root Finding Eamples Find real
Finding Roots of Equations
 Finding Roots of Equations Solution Methods Overview Bisection/Half-interval Search Method of false position/regula Falsi Secant Method Newton Raphson Iteration Method Many more. Open Methods Bracketing
Finding Roots of Equations Solution Methods Overview Bisection/Half-interval Search Method of false position/regula Falsi Secant Method Newton Raphson Iteration Method Many more. Open Methods Bracketing
10.3 Steepest Descent Techniques
 The advantage of the Newton and quasi-newton methods for solving systems of nonlinear equations is their speed of convergence once a sufficiently accurate approximation is known. A weakness of these methods
The advantage of the Newton and quasi-newton methods for solving systems of nonlinear equations is their speed of convergence once a sufficiently accurate approximation is known. A weakness of these methods
Numerical Analysis Fall. Roots: Open Methods
 Numerical Analysis 2015 Fall Roots: Open Methods Open Methods Open methods differ from bracketing methods, in that they require only a single starting value or two starting values that do not necessarily
Numerical Analysis 2015 Fall Roots: Open Methods Open Methods Open methods differ from bracketing methods, in that they require only a single starting value or two starting values that do not necessarily
INTRODUCTION TO NUMERICAL ANALYSIS
 INTRODUCTION TO NUMERICAL ANALYSIS Cho, Hyoung Kyu Department of Nuclear Engineering Seoul National University 3. SOLVING NONLINEAR EQUATIONS 3.1 Background 3.2 Estimation of errors in numerical solutions
INTRODUCTION TO NUMERICAL ANALYSIS Cho, Hyoung Kyu Department of Nuclear Engineering Seoul National University 3. SOLVING NONLINEAR EQUATIONS 3.1 Background 3.2 Estimation of errors in numerical solutions
Chapter 2 Solutions of Equations of One Variable
 Chapter 2 Solutions of Equations of One Variable 2.1 Bisection Method In this chapter we consider one of the most basic problems of numerical approximation, the root-finding problem. This process involves
Chapter 2 Solutions of Equations of One Variable 2.1 Bisection Method In this chapter we consider one of the most basic problems of numerical approximation, the root-finding problem. This process involves
Root finding. Root finding problem. Root finding problem. Root finding problem. Notes. Eugeniy E. Mikhailov. Lecture 05. Notes
 Root finding Eugeniy E. Mikhailov The College of William & Mary Lecture 05 Eugeniy Mikhailov (W&M) Practical Computing Lecture 05 1 / 10 2 sin(x) 1 = 0 2 sin(x) 1 = 0 Often we have a problem which looks
Root finding Eugeniy E. Mikhailov The College of William & Mary Lecture 05 Eugeniy Mikhailov (W&M) Practical Computing Lecture 05 1 / 10 2 sin(x) 1 = 0 2 sin(x) 1 = 0 Often we have a problem which looks
Solution of Algebric & Transcendental Equations
 Page15 Solution of Algebric & Transcendental Equations Contents: o Introduction o Evaluation of Polynomials by Horner s Method o Methods of solving non linear equations o Bracketing Methods o Bisection
Page15 Solution of Algebric & Transcendental Equations Contents: o Introduction o Evaluation of Polynomials by Horner s Method o Methods of solving non linear equations o Bracketing Methods o Bisection
VCE. VCE Maths Methods 1 and 2 Pocket Study Guide
 VCE VCE Maths Methods 1 and 2 Pocket Study Guide Contents Introduction iv 1 Linear functions 1 2 Quadratic functions 10 3 Cubic functions 16 4 Advanced functions and relations 24 5 Probability and simulation
VCE VCE Maths Methods 1 and 2 Pocket Study Guide Contents Introduction iv 1 Linear functions 1 2 Quadratic functions 10 3 Cubic functions 16 4 Advanced functions and relations 24 5 Probability and simulation
Math 4329: Numerical Analysis Chapter 03: Newton s Method. Natasha S. Sharma, PhD
 Mathematical question we are interested in numerically answering How to find the x-intercepts of a function f (x)? These x-intercepts are called the roots of the equation f (x) = 0. Notation: denote the
Mathematical question we are interested in numerically answering How to find the x-intercepts of a function f (x)? These x-intercepts are called the roots of the equation f (x) = 0. Notation: denote the
Lecture 8. Root finding II
 1 Introduction Lecture 8 Root finding II In the previous lecture we considered the bisection root-bracketing algorithm. It requires only that the function be continuous and that we have a root bracketed
1 Introduction Lecture 8 Root finding II In the previous lecture we considered the bisection root-bracketing algorithm. It requires only that the function be continuous and that we have a root bracketed
Root finding. Eugeniy E. Mikhailov. Lecture 05. The College of William & Mary. Eugeniy Mikhailov (W&M) Practical Computing Lecture 05 1 / 10
 Practical Computing Lecture 05 1 / 10") Root finding Eugeniy E. Mikhailov The College of William & Mary Lecture 05 Eugeniy Mikhailov (W&M) Practical Computing Lecture 05 1 / 10 Root finding problem Generally we want to solve the following canonical
Root finding Eugeniy E. Mikhailov The College of William & Mary Lecture 05 Eugeniy Mikhailov (W&M) Practical Computing Lecture 05 1 / 10 Root finding problem Generally we want to solve the following canonical
Goals for This Lecture:
 Goals for This Lecture: Learn the Newton-Raphson method for finding real roots of real functions Learn the Bisection method for finding real roots of a real function Look at efficient implementations of
Goals for This Lecture: Learn the Newton-Raphson method for finding real roots of real functions Learn the Bisection method for finding real roots of a real function Look at efficient implementations of
Root Finding Convergence Analysis
 Root Finding Convergence Analysis Justin Ross & Matthew Kwitowski November 5, 2012 There are many different ways to calculate the root of a function. Some methods are direct and can be done by simply solving
Root Finding Convergence Analysis Justin Ross & Matthew Kwitowski November 5, 2012 There are many different ways to calculate the root of a function. Some methods are direct and can be done by simply solving
Numerical Integration and Numerical Differentiation. Hsiao-Lung Chan Dept Electrical Engineering Chang Gung University, Taiwan
 Numerical Integration and Numerical Differentiation Hsiao-Lung Chan Dept Electrical Engineering Chang Gung University, Taiwan chanhl@mail.cgu.edu.tw Integration 2 Mean for discrete and continuous data
Numerical Integration and Numerical Differentiation Hsiao-Lung Chan Dept Electrical Engineering Chang Gung University, Taiwan chanhl@mail.cgu.edu.tw Integration 2 Mean for discrete and continuous data
Determining the Roots of Non-Linear Equations Part I
 Determining the Roots of Non-Linear Equations Part I Prof. Dr. Florian Rupp German University of Technology in Oman (GUtech) Introduction to Numerical Methods for ENG & CS (Mathematics IV) Spring Term
Determining the Roots of Non-Linear Equations Part I Prof. Dr. Florian Rupp German University of Technology in Oman (GUtech) Introduction to Numerical Methods for ENG & CS (Mathematics IV) Spring Term
CE 205 Numerical Methods. Some of the analysis methods you have used so far.. Algebra Calculus Differential Equations etc.
 CE 205 Numerical Methods Dr. Charisma Choudhury Lecture 1 March 30, 2009 Objective Some of the analysis methods you have used so far.. Algebra Calculus Differential Equations etc. Often not possible to
CE 205 Numerical Methods Dr. Charisma Choudhury Lecture 1 March 30, 2009 Objective Some of the analysis methods you have used so far.. Algebra Calculus Differential Equations etc. Often not possible to
PART I Lecture Notes on Numerical Solution of Root Finding Problems MATH 435
 PART I Lecture Notes on Numerical Solution of Root Finding Problems MATH 435 Professor Biswa Nath Datta Department of Mathematical Sciences Northern Illinois University DeKalb, IL. 60115 USA E mail: dattab@math.niu.edu
PART I Lecture Notes on Numerical Solution of Root Finding Problems MATH 435 Professor Biswa Nath Datta Department of Mathematical Sciences Northern Illinois University DeKalb, IL. 60115 USA E mail: dattab@math.niu.edu
SOLUTION OF ALGEBRAIC AND TRANSCENDENTAL EQUATIONS BISECTION METHOD
 BISECTION METHOD If a function f(x) is continuous between a and b, and f(a) and f(b) are of opposite signs, then there exists at least one root between a and b. It is shown graphically as, Let f a be negative
BISECTION METHOD If a function f(x) is continuous between a and b, and f(a) and f(b) are of opposite signs, then there exists at least one root between a and b. It is shown graphically as, Let f a be negative
Root finding. Eugeniy E. Mikhailov. Lecture 06. The College of William & Mary. Eugeniy Mikhailov (W&M) Practical Computing Lecture 06 1 / 10
 Practical Computing Lecture 06 1 / 10") Root finding Eugeniy E. Mikhailov The College of William & Mary Lecture 06 Eugeniy Mikhailov (W&M) Practical Computing Lecture 06 1 / 10 Root finding problem Generally we want to solve the following canonical
Root finding Eugeniy E. Mikhailov The College of William & Mary Lecture 06 Eugeniy Mikhailov (W&M) Practical Computing Lecture 06 1 / 10 Root finding problem Generally we want to solve the following canonical
Homework 2 - Solutions MA/CS 375, Fall 2005
 Homework 2 - Solutions MA/CS 375, Fall 2005 1. Use the bisection method, Newton s method, and the Matlab R function fzero to compute a positive real number x satisfying: sinh x = cos x. For each of the
Homework 2 - Solutions MA/CS 375, Fall 2005 1. Use the bisection method, Newton s method, and the Matlab R function fzero to compute a positive real number x satisfying: sinh x = cos x. For each of the
SKMM 3023 Applied Numerical Methods
 SKMM 3023 Applied Numerical Methods Solution of Nonlinear Equations ibn Abdullah Faculty of Mechanical Engineering Òº ÙÐÐ ÚºÒÙÐÐ ¾¼½ SKMM 3023 Applied Numerical Methods Solution of Nonlinear Equations
SKMM 3023 Applied Numerical Methods Solution of Nonlinear Equations ibn Abdullah Faculty of Mechanical Engineering Òº ÙÐÐ ÚºÒÙÐÐ ¾¼½ SKMM 3023 Applied Numerical Methods Solution of Nonlinear Equations
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation
x and y, called the coordinates of the point.
 P.1 The Cartesian Plane The Cartesian Plane The Cartesian Plane (also called the rectangular coordinate system) is the plane that allows you to represent ordered pairs of real numbers by points. It is
P.1 The Cartesian Plane The Cartesian Plane The Cartesian Plane (also called the rectangular coordinate system) is the plane that allows you to represent ordered pairs of real numbers by points. It is
January 18, 2008 Steve Gu. Reference: Eta Kappa Nu, UCLA Iota Gamma Chapter, Introduction to MATLAB,
 Introduction to MATLAB January 18, 2008 Steve Gu Reference: Eta Kappa Nu, UCLA Iota Gamma Chapter, Introduction to MATLAB, Part I: Basics MATLAB Environment Getting Help Variables Vectors, Matrices, and
Introduction to MATLAB January 18, 2008 Steve Gu Reference: Eta Kappa Nu, UCLA Iota Gamma Chapter, Introduction to MATLAB, Part I: Basics MATLAB Environment Getting Help Variables Vectors, Matrices, and
Solving Non-Linear Equations (Root Finding)
") Solving Non-Linear Equations (Root Finding) Root finding Methods What are root finding methods? Methods for determining a solution of an equation. Essentially finding a root of a function, that is, a zero
Solving Non-Linear Equations (Root Finding) Root finding Methods What are root finding methods? Methods for determining a solution of an equation. Essentially finding a root of a function, that is, a zero
Lecture 44. Better and successive approximations x2, x3,, xn to the root are obtained from
 Lecture 44 Solution of Non-Linear Equations Regula-Falsi Method Method of iteration Newton - Raphson Method Muller s Method Graeffe s Root Squaring Method Newton -Raphson Method An approximation to the
Lecture 44 Solution of Non-Linear Equations Regula-Falsi Method Method of iteration Newton - Raphson Method Muller s Method Graeffe s Root Squaring Method Newton -Raphson Method An approximation to the
SME 3023 Applied Numerical Methods
 UNIVERSITI TEKNOLOGI MALAYSIA SME 3023 Applied Numerical Methods Solution of Nonlinear Equations Abu Hasan Abdullah Faculty of Mechanical Engineering Sept 2012 Abu Hasan Abdullah (FME) SME 3023 Applied
UNIVERSITI TEKNOLOGI MALAYSIA SME 3023 Applied Numerical Methods Solution of Nonlinear Equations Abu Hasan Abdullah Faculty of Mechanical Engineering Sept 2012 Abu Hasan Abdullah (FME) SME 3023 Applied
Chapter 4. Solution of Non-linear Equation. Module No. 1. Newton s Method to Solve Transcendental Equation
 Numerical Analysis by Dr. Anita Pal Assistant Professor Department of Mathematics National Institute of Technology Durgapur Durgapur-713209 email: anita.buie@gmail.com 1 . Chapter 4 Solution of Non-linear
Numerical Analysis by Dr. Anita Pal Assistant Professor Department of Mathematics National Institute of Technology Durgapur Durgapur-713209 email: anita.buie@gmail.com 1 . Chapter 4 Solution of Non-linear
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 5 Nonlinear Equations Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction
Scientific Computing: An Introductory Survey Chapter 5 Nonlinear Equations Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction
GENG2140, S2, 2012 Week 7: Curve fitting
 GENG2140, S2, 2012 Week 7: Curve fitting Curve fitting is the process of constructing a curve, or mathematical function, f(x) that has the best fit to a series of data points Involves fitting lines and
GENG2140, S2, 2012 Week 7: Curve fitting Curve fitting is the process of constructing a curve, or mathematical function, f(x) that has the best fit to a series of data points Involves fitting lines and
Math 471. Numerical methods Root-finding algorithms for nonlinear equations
 Math 471. Numerical methods Root-finding algorithms for nonlinear equations overlap Section.1.5 of Bradie Our goal in this chapter is to find the root(s) for f(x) = 0..1 Bisection Method Intermediate value
Math 471. Numerical methods Root-finding algorithms for nonlinear equations overlap Section.1.5 of Bradie Our goal in this chapter is to find the root(s) for f(x) = 0..1 Bisection Method Intermediate value
Outline. Math Numerical Analysis. Intermediate Value Theorem. Lecture Notes Zeros and Roots. Joseph M. Mahaffy,
 Outline Math 541 - Numerical Analysis Lecture Notes Zeros and Roots Joseph M. Mahaffy, jmahaffy@mail.sdsu.edu Department of Mathematics and Statistics Dynamical Systems Group Computational Sciences Research
Outline Math 541 - Numerical Analysis Lecture Notes Zeros and Roots Joseph M. Mahaffy, jmahaffy@mail.sdsu.edu Department of Mathematics and Statistics Dynamical Systems Group Computational Sciences Research
Unit 2: Solving Scalar Equations. Notes prepared by: Amos Ron, Yunpeng Li, Mark Cowlishaw, Steve Wright Instructor: Steve Wright
 cs416: introduction to scientific computing 01/9/07 Unit : Solving Scalar Equations Notes prepared by: Amos Ron, Yunpeng Li, Mark Cowlishaw, Steve Wright Instructor: Steve Wright 1 Introduction We now
cs416: introduction to scientific computing 01/9/07 Unit : Solving Scalar Equations Notes prepared by: Amos Ron, Yunpeng Li, Mark Cowlishaw, Steve Wright Instructor: Steve Wright 1 Introduction We now
Solution of Nonlinear Equations: Graphical and Incremental Sea
 Outlines Solution of Nonlinear Equations: Graphical and s September 2, 2004 Outlines Part I: Solution of Nonlinear Equations Solution of Nonlinear Equations Introduction General Form of the Problem Types
Outlines Solution of Nonlinear Equations: Graphical and s September 2, 2004 Outlines Part I: Solution of Nonlinear Equations Solution of Nonlinear Equations Introduction General Form of the Problem Types
BHASVIC MαTHS. (a) The table shows the number of eggs a bird lays per brood cycle. The mean number of eggs is 1.5. Find the value of p
 The table shows the number of eggs a bird lays per brood cycle. The mean number of eggs is 1.5. Find the value of p") 1 (a) The table shows the number of eggs a bird lays per brood cycle. The mean number of eggs is 1.5. Find the value of p Eggs 1 2 3 Frequency 7 p 2 (b) From the large data set, the daily mean visibility,
1 (a) The table shows the number of eggs a bird lays per brood cycle. The mean number of eggs is 1.5. Find the value of p Eggs 1 2 3 Frequency 7 p 2 (b) From the large data set, the daily mean visibility,
ROOT FINDING REVIEW MICHELLE FENG
 ROOT FINDING REVIEW MICHELLE FENG 1.1. Bisection Method. 1. Root Finding Methods (1) Very naive approach based on the Intermediate Value Theorem (2) You need to be looking in an interval with only one
ROOT FINDING REVIEW MICHELLE FENG 1.1. Bisection Method. 1. Root Finding Methods (1) Very naive approach based on the Intermediate Value Theorem (2) You need to be looking in an interval with only one
Midterm Review. Igor Yanovsky (Math 151A TA)
") Midterm Review Igor Yanovsky (Math 5A TA) Root-Finding Methods Rootfinding methods are designed to find a zero of a function f, that is, to find a value of x such that f(x) =0 Bisection Method To apply
Midterm Review Igor Yanovsky (Math 5A TA) Root-Finding Methods Rootfinding methods are designed to find a zero of a function f, that is, to find a value of x such that f(x) =0 Bisection Method To apply
We consider the problem of finding a polynomial that interpolates a given set of values:
 Chapter 5 Interpolation 5. Polynomial Interpolation We consider the problem of finding a polynomial that interpolates a given set of values: x x 0 x... x n y y 0 y... y n where the x i are all distinct.
Chapter 5 Interpolation 5. Polynomial Interpolation We consider the problem of finding a polynomial that interpolates a given set of values: x x 0 x... x n y y 0 y... y n where the x i are all distinct.
Applied Numerical Methods With MATLAB for Engineers and Scientists
 Solutions Manual to accompany Applied Numerical Methods With MATLAB for Engineers and Scientists Steven C. Chapra Tufts University CHAPTER. You are given the following differential equation with the initial
Solutions Manual to accompany Applied Numerical Methods With MATLAB for Engineers and Scientists Steven C. Chapra Tufts University CHAPTER. You are given the following differential equation with the initial
Relation of Pure Minimum Cost Flow Model to Linear Programming
 Appendix A Page 1 Relation of Pure Minimum Cost Flow Model to Linear Programming The Network Model The network pure minimum cost flow model has m nodes. The external flows given by the vector b with m
Appendix A Page 1 Relation of Pure Minimum Cost Flow Model to Linear Programming The Network Model The network pure minimum cost flow model has m nodes. The external flows given by the vector b with m
Numerical Methods I Solving Nonlinear Equations
 Numerical Methods I Solving Nonlinear Equations Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 October 16th, 2014 A. Donev (Courant Institute)
Numerical Methods I Solving Nonlinear Equations Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 October 16th, 2014 A. Donev (Courant Institute)
NUMERICAL AND STATISTICAL COMPUTING (MCA-202-CR)
") NUMERICAL AND STATISTICAL COMPUTING (MCA-202-CR) Autumn Session UNIT 1 Numerical analysis is the study of algorithms that uses, creates and implements algorithms for obtaining numerical solutions to problems
NUMERICAL AND STATISTICAL COMPUTING (MCA-202-CR) Autumn Session UNIT 1 Numerical analysis is the study of algorithms that uses, creates and implements algorithms for obtaining numerical solutions to problems
Chapter 5 - Integration
 Chapter 5 - Integration 5.1 Approximating the Area under a Curve 5.2 Definite Integrals 5.3 Fundamental Theorem of Calculus 5.4 Working with Integrals 5.5 Substitution Rule for Integrals 1 Q. Is the area
Chapter 5 - Integration 5.1 Approximating the Area under a Curve 5.2 Definite Integrals 5.3 Fundamental Theorem of Calculus 5.4 Working with Integrals 5.5 Substitution Rule for Integrals 1 Q. Is the area
Computational Methods CMSC/AMSC/MAPL 460. Solving nonlinear equations and zero finding. Finding zeroes of functions
 Computational Methods CMSC/AMSC/MAPL 460 Solving nonlinear equations and zero finding Ramani Duraiswami, Dept. of Computer Science Where does it arise? Finding zeroes of functions Solving functional equations
Computational Methods CMSC/AMSC/MAPL 460 Solving nonlinear equations and zero finding Ramani Duraiswami, Dept. of Computer Science Where does it arise? Finding zeroes of functions Solving functional equations
Nonlinear Equations. Not guaranteed to have any real solutions, but generally do for astrophysical problems.
 Nonlinear Equations Often (most of the time??) the relevant system of equations is not linear in the unknowns. Then, cannot decompose as Ax = b. Oh well. Instead write as: (1) f(x) = 0 function of one
Nonlinear Equations Often (most of the time??) the relevant system of equations is not linear in the unknowns. Then, cannot decompose as Ax = b. Oh well. Instead write as: (1) f(x) = 0 function of one
CS 221 Lecture 9. Tuesday, 1 November 2011
 CS 221 Lecture 9 Tuesday, 1 November 2011 Some slides in this lecture are from the publisher s slides for Engineering Computation: An Introduction Using MATLAB and Excel 2009 McGraw-Hill Today s Agenda
CS 221 Lecture 9 Tuesday, 1 November 2011 Some slides in this lecture are from the publisher s slides for Engineering Computation: An Introduction Using MATLAB and Excel 2009 McGraw-Hill Today s Agenda
4.1 Areas and Distances. The Area Problem: GOAL: Find the area of the region S that lies under the curve y = f(x) from a to b.
 from a to b.") 4.1 Areas and Distances The Area Problem: GOAL: Find the area of the region S that lies under the curve y = f(x) from a to b. Easier Problems: Find the area of a rectangle with length l and width w. Find
4.1 Areas and Distances The Area Problem: GOAL: Find the area of the region S that lies under the curve y = f(x) from a to b. Easier Problems: Find the area of a rectangle with length l and width w. Find
Introductory Numerical Analysis
 Introductory Numerical Analysis Lecture Notes December 16, 017 Contents 1 Introduction to 1 11 Floating Point Numbers 1 1 Computational Errors 13 Algorithm 3 14 Calculus Review 3 Root Finding 5 1 Bisection
Introductory Numerical Analysis Lecture Notes December 16, 017 Contents 1 Introduction to 1 11 Floating Point Numbers 1 1 Computational Errors 13 Algorithm 3 14 Calculus Review 3 Root Finding 5 1 Bisection
Math 2413 General Review for Calculus Last Updated 02/23/2016
 Math 243 General Review for Calculus Last Updated 02/23/206 Find the average velocity of the function over the given interval.. y = 6x 3-5x 2-8, [-8, ] Find the slope of the curve for the given value of
Math 243 General Review for Calculus Last Updated 02/23/206 Find the average velocity of the function over the given interval.. y = 6x 3-5x 2-8, [-8, ] Find the slope of the curve for the given value of
Math Numerical Analysis
 Math 541 - Numerical Analysis Lecture Notes Zeros and Roots Joseph M. Mahaffy, jmahaffy@mail.sdsu.edu Department of Mathematics and Statistics Dynamical Systems Group Computational Sciences Research Center
Math 541 - Numerical Analysis Lecture Notes Zeros and Roots Joseph M. Mahaffy, jmahaffy@mail.sdsu.edu Department of Mathematics and Statistics Dynamical Systems Group Computational Sciences Research Center
CHAPTER Order points and then develop a divided difference table:
 1 CHAPTER 17 17.1 Order points and then develop a divided difference table: x y First Second Third Fourth Fifth Sixth 5 5.75 -.45 0.75 -.E-17 1.51788E-18 7.54895E-19 -.5719E-19 1.8 16.415 -.075 0.75-1.7E-17
1 CHAPTER 17 17.1 Order points and then develop a divided difference table: x y First Second Third Fourth Fifth Sixth 5 5.75 -.45 0.75 -.E-17 1.51788E-18 7.54895E-19 -.5719E-19 1.8 16.415 -.075 0.75-1.7E-17
5 Finding roots of equations
 Lecture notes for Numerical Analysis 5 Finding roots of equations Topics:. Problem statement. Bisection Method 3. Newton s Method 4. Fixed Point Iterations 5. Systems of equations 6. Notes and further
Lecture notes for Numerical Analysis 5 Finding roots of equations Topics:. Problem statement. Bisection Method 3. Newton s Method 4. Fixed Point Iterations 5. Systems of equations 6. Notes and further
Lecture Notes to Accompany. Scientific Computing An Introductory Survey. by Michael T. Heath. Chapter 5. Nonlinear Equations
 Lecture Notes to Accompany Scientific Computing An Introductory Survey Second Edition by Michael T Heath Chapter 5 Nonlinear Equations Copyright c 2001 Reproduction permitted only for noncommercial, educational
Lecture Notes to Accompany Scientific Computing An Introductory Survey Second Edition by Michael T Heath Chapter 5 Nonlinear Equations Copyright c 2001 Reproduction permitted only for noncommercial, educational
The Islamic University of Gaza Faculty of Engineering Civil Engineering Department. Numerical Analysis ECIV Chapter 5. Bracketing Methods
 The Islami University of Gaza Faulty of Engineering Civil Engineering Department Numerial Analysis ECIV 3306 Chapter 5 Braketing Methods Assoiate Prof. Mazen Abualtayef Civil Engineering Department, The
The Islami University of Gaza Faulty of Engineering Civil Engineering Department Numerial Analysis ECIV 3306 Chapter 5 Braketing Methods Assoiate Prof. Mazen Abualtayef Civil Engineering Department, The
CHAPTER 1 INTRODUCTION TO NUMERICAL METHOD
 CHAPTER 1 INTRODUCTION TO NUMERICAL METHOD Presenter: Dr. Zalilah Sharer 2018 School of Chemical and Energy Engineering Universiti Teknologi Malaysia 16 September 2018 Chemical Engineering, Computer &
CHAPTER 1 INTRODUCTION TO NUMERICAL METHOD Presenter: Dr. Zalilah Sharer 2018 School of Chemical and Energy Engineering Universiti Teknologi Malaysia 16 September 2018 Chemical Engineering, Computer &
Nonlinearity Root-finding Bisection Fixed Point Iteration Newton s Method Secant Method Conclusion. Nonlinear Systems
 Nonlinear Systems CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Nonlinear Systems 1 / 24 Part III: Nonlinear Problems Not all numerical problems
Nonlinear Systems CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Nonlinear Systems 1 / 24 Part III: Nonlinear Problems Not all numerical problems
SOLVING EQUATIONS OF ONE VARIABLE
 1 SOLVING EQUATIONS OF ONE VARIABLE ELM1222 Numerical Analysis Some of the contents are adopted from Laurene V. Fausett, Applied Numerical Analysis using MATLAB. Prentice Hall Inc., 1999 2 Today s lecture
1 SOLVING EQUATIONS OF ONE VARIABLE ELM1222 Numerical Analysis Some of the contents are adopted from Laurene V. Fausett, Applied Numerical Analysis using MATLAB. Prentice Hall Inc., 1999 2 Today s lecture
3.1 Introduction. Solve non-linear real equation f(x) = 0 for real root or zero x. E.g. x x 1.5 =0, tan x x =0.
 = 0 for real root or zero x. E.g. x x 1.5 =0, tan x x =0.") 3.1 Introduction Solve non-linear real equation f(x) = 0 for real root or zero x. E.g. x 3 +1.5x 1.5 =0, tan x x =0. Practical existence test for roots: by intermediate value theorem, f C[a, b] & f(a)f(b)
3.1 Introduction Solve non-linear real equation f(x) = 0 for real root or zero x. E.g. x 3 +1.5x 1.5 =0, tan x x =0. Practical existence test for roots: by intermediate value theorem, f C[a, b] & f(a)f(b)
NATIONAL BOARD FOR HIGHER MATHEMATICS. M. A. and M.Sc. Scholarship Test. September 22, Time Allowed: 150 Minutes Maximum Marks: 30
 NATIONAL BOARD FOR HIGHER MATHEMATICS M. A. and M.Sc. Scholarship Test September 22, 2012 Time Allowed: 150 Minutes Maximum Marks: 30 Please read, carefully, the instructions on the following page 1 INSTRUCTIONS
NATIONAL BOARD FOR HIGHER MATHEMATICS M. A. and M.Sc. Scholarship Test September 22, 2012 Time Allowed: 150 Minutes Maximum Marks: 30 Please read, carefully, the instructions on the following page 1 INSTRUCTIONS
Chapter 3: Root Finding. September 26, 2005
 Chapter 3: Root Finding September 26, 2005 Outline 1 Root Finding 2 3.1 The Bisection Method 3 3.2 Newton s Method: Derivation and Examples 4 3.3 How To Stop Newton s Method 5 3.4 Application: Division
Chapter 3: Root Finding September 26, 2005 Outline 1 Root Finding 2 3.1 The Bisection Method 3 3.2 Newton s Method: Derivation and Examples 4 3.3 How To Stop Newton s Method 5 3.4 Application: Division
Outline. Scientific Computing: An Introductory Survey. Nonlinear Equations. Nonlinear Equations. Examples: Nonlinear Equations
 Methods for Systems of Methods for Systems of Outline Scientific Computing: An Introductory Survey Chapter 5 1 Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign
Methods for Systems of Methods for Systems of Outline Scientific Computing: An Introductory Survey Chapter 5 1 Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign
BHASVIC MαTHS. Convert the below into the form ax m + bx n : (b) (c) (e) (f)
 (c) (e) (f)") Convert the below into the form ax m + bx n : (a) 1+5x 4x 1 (b) 3x 4 x x 3 (c) 4 16x 3 3 27x 3 2x 2 (d) 4 5x 3x 2 (e) (f) 4x 3 1 2x 3 x 4x+ 81x2 9 x 2 Co-ordinate Geometry line The equation of straight
Convert the below into the form ax m + bx n : (a) 1+5x 4x 1 (b) 3x 4 x x 3 (c) 4 16x 3 3 27x 3 2x 2 (d) 4 5x 3x 2 (e) (f) 4x 3 1 2x 3 x 4x+ 81x2 9 x 2 Co-ordinate Geometry line The equation of straight
FIXED POINT ITERATION
 FIXED POINT ITERATION The idea of the fixed point iteration methods is to first reformulate a equation to an equivalent fixed point problem: f (x) = 0 x = g(x) and then to use the iteration: with an initial
FIXED POINT ITERATION The idea of the fixed point iteration methods is to first reformulate a equation to an equivalent fixed point problem: f (x) = 0 x = g(x) and then to use the iteration: with an initial
Numerical Methods Dr. Sanjeev Kumar Department of Mathematics Indian Institute of Technology Roorkee Lecture No 7 Regula Falsi and Secant Methods
 Numerical Methods Dr. Sanjeev Kumar Department of Mathematics Indian Institute of Technology Roorkee Lecture No 7 Regula Falsi and Secant Methods So welcome to the next lecture of the 2 nd unit of this
Numerical Methods Dr. Sanjeev Kumar Department of Mathematics Indian Institute of Technology Roorkee Lecture No 7 Regula Falsi and Secant Methods So welcome to the next lecture of the 2 nd unit of this
1.1: The bisection method. September 2017
 (1/11) 1.1: The bisection method Solving nonlinear equations MA385/530 Numerical Analysis September 2017 3 2 f(x)= x 2 2 x axis 1 0 1 x [0] =a x [2] =1 x [3] =1.5 x [1] =b 2 0.5 0 0.5 1 1.5 2 2.5 1 Solving
(1/11) 1.1: The bisection method Solving nonlinear equations MA385/530 Numerical Analysis September 2017 3 2 f(x)= x 2 2 x axis 1 0 1 x [0] =a x [2] =1 x [3] =1.5 x [1] =b 2 0.5 0 0.5 1 1.5 2 2.5 1 Solving
AQA Level 2 Certificate in FURTHER MATHEMATICS (8365/2)
") SPECIMEN MATERIAL AQA Level 2 Certificate in FURTHER MATHEMATICS (8365/2) Paper 2 Specimen 2020 Time allowed: 1 hour 45 minutes Materials For this paper you must have: mathematical instruments You may
SPECIMEN MATERIAL AQA Level 2 Certificate in FURTHER MATHEMATICS (8365/2) Paper 2 Specimen 2020 Time allowed: 1 hour 45 minutes Materials For this paper you must have: mathematical instruments You may
R1: Sets A set is a collection of objects sets are written using set brackets each object in onset is called an element or member
 Chapter R Review of basic concepts * R1: Sets A set is a collection of objects sets are written using set brackets each object in onset is called an element or member Ex: Write the set of counting numbers
Chapter R Review of basic concepts * R1: Sets A set is a collection of objects sets are written using set brackets each object in onset is called an element or member Ex: Write the set of counting numbers
Numerical solutions of nonlinear systems of equations
 Numerical solutions of nonlinear systems of equations Tsung-Ming Huang Department of Mathematics National Taiwan Normal University, Taiwan E-mail: min@math.ntnu.edu.tw August 28, 2011 Outline 1 Fixed points
Numerical solutions of nonlinear systems of equations Tsung-Ming Huang Department of Mathematics National Taiwan Normal University, Taiwan E-mail: min@math.ntnu.edu.tw August 28, 2011 Outline 1 Fixed points
Math 2142 Homework 5 Part 1 Solutions
 Math 2142 Homework 5 Part 1 Solutions Problem 1. For the following homogeneous second order differential equations, give the general solution and the particular solution satisfying the given initial conditions.
Math 2142 Homework 5 Part 1 Solutions Problem 1. For the following homogeneous second order differential equations, give the general solution and the particular solution satisfying the given initial conditions.
Two hours. To be provided by Examinations Office: Mathematical Formula Tables. THE UNIVERSITY OF MANCHESTER. 29 May :45 11:45
 Two hours MATH20602 To be provided by Examinations Office: Mathematical Formula Tables. THE UNIVERSITY OF MANCHESTER NUMERICAL ANALYSIS 1 29 May 2015 9:45 11:45 Answer THREE of the FOUR questions. If more
Two hours MATH20602 To be provided by Examinations Office: Mathematical Formula Tables. THE UNIVERSITY OF MANCHESTER NUMERICAL ANALYSIS 1 29 May 2015 9:45 11:45 Answer THREE of the FOUR questions. If more