The Pennsylvania State University. The Graduate School. The Harold and Inge Marcus Department of Industrial & Manufacturing Engineering
|
|
|
- Kory Craig
- 6 years ago
- Views:
Transcription
1 The Pennylvn Stte Unvety The Gute Shool The Hol n Inge Mu Deptment of Inutl & Mnuftung Engneeng THE MODELING OF A SIX DEGREE-OF-FREEDOM INDUSTRIAL ROBOT FOR THE PURPOSE OF EFFICIENT PATH PLANNING A The n Inutl Engneeng by Tyle J. Cte Submtte n Ptl Fulfllment of the Requement fo the Degee of Mte of Sene My 9
2 The the of Tyle J. Cte w evewe n ppove* by the followng: Rh A. Wyk Pofeo of Inutl Engneeng n Leonh Ch n Engneeng The Avo Vttl V. Pbhu Pofeo of Inutl Engneeng Rh J. Koubek Pofeo of Inutl Engneeng He of the Hol n Inge Mu Deptment of Inutl & Mnuftung Engneeng *Sgntue e on fle n the Gute Shool
3 ABSTRACT In oe to ompete globlly, mot mnuftue e lookng fo wy to eue ot n, t the me tme, e fng neng emn to beome envonmentlly eponble. One metho to hevng both gol to fn wy to mxmze poe effeny. In th eeh, obot pth of vou geomete e exmne n oe to etemne the pth of lowet enegy onumpton, tvelng tne, n poe tme. The pth e egne to meet the gol of mple hypothetl eno, equng the obot to move fom pef tt poton to n en poton whle umventng n obtle. The vou geomete nlue tngul, que, etngul, em-ul, n fouth egee polynoml. Eh pth geomety tete une two e: one whee the pth move ttly hozontl, whle the othe llow fo vetl movement. Sevel obevton e ue egng the vou pth n pont of nteet egng vble uh toque o enegy onumpton. Fo the obot moele n th wok, t hown tht of ll the pth exmne, the hozontl tngul pth geomety h the hotet tvelng tme, hotet tvelng tne, n onume the let mount of enegy.
4 v TABLE OF CONTENTS LIST OF FIGURES...v LIST OF TABLES...v Chpte INTRODUCTION.... Motvton.... Poblem Sttement....3 Ovevew of The... Chpte LITERATURE REVIEW.... Intouton.... Robot Moelng n Knemt....3 Jobn Mte n Robot Dynm...9. Pth Plnnng... Chpte 3 METHODOLOGY Intouton Moelng the ABB IRB Robot Notton n Mofe Denvt-Htenbug Pmete Aumpton Fow Knemt Invee Knemt Inet Teno The Jobn Mtx Robot Dynm Pth Plnnng Vou Pth Geomete Pogmmng n Smultng the ABB IRB Robot Pogmmng Ung RAPID Smultng Ung RobotStuo Clulton of Conume Enegy...33 Chpte RESULTS...3. Intouton...3. Reult Ce Duon Tngul Pth Geomety Sque Pth Geomety Retngul Pth Geomety...
5 v.3. Sem-Cul Pth Geomety Polynoml Pth Geomety.... Ce Duon..... Tngul Pth Geomety Sque Pth Geomety Retngul Pth Geomety..... Sem-Cul Pth Geomety Polynoml Pth Geomety...8. Tvel Tme Vlton n Sentvty Anly...9. Reommenton....7 Genel Obevton... Chpte CONCLUSIONS AND FUTURE RESEARCH...3. Conluon...3. Futue Reeh... REFERENCES... Appenx A Tnfomton Mte...8 Appenx B Invee Knemt Devton... Appenx D Jobn Mtx Devton... Appenx E Smple RAPID Coe...7 Appenx F Smple MATLAB Coe...9 Appenx G MATLAB Reult...7
6 v LIST OF FIGURES Fgue -: The ABB IRB obot wth lbele pont fo the ebe eno...3 Fgue -: Compoune lnk fme, eh ebe eltve to the pevou one wth the ue of tnfomton mtx. Th onept ue to elte the be fme to the tool fme. (Imge Soue: Cg 3)... Fgue -: Lnk fme n knemt pmete of n bty jont. (Imge Soue: Cg 8)...7 Fgue 3-: Knemt pmete n fme gnment of the ABB IRB mnpulto...8 Fgue 3-: Pojeton of the wt ente onto the xy plne. (Imge Soue: Vente 8)... Fgue 3-3: Pojeton onto the plne fome by lnk n 3. (Imge Soue: Vente 9)... Fgue 3-: Tngul pth fo Ce (hozontl pth) n Ce (vetl pth)....8 Fgue 3-: Sque pth fo Ce (hozontl pth) n Ce (vetl pth)...8 Fgue 3-: Retngul pth fo Ce (hozontl pth) n Ce (vetl pth)....9 Fgue 3-7: Sem-ul pth fo Ce (hozontl pth) n Ce (vetl pth)....9 Fgue 3-8: Polynoml pth fo Ce (hozontl pth) n Ce (vetl pth)....3 Fgue 3-9: MATLAB flowht Fgue -: Powe equement of the hozontl tngul pth lo follow omewht tngul uve...38 Fgue -: Jont toque of the que pth (Ce ) wth pke t hnge n eton Fgue -3: Jont powe equement of the hozontl (Ce ) etngul pth wth pek of powe when the obot ue Jont to move wy n tow the be....
7 v Fgue -: Powe equement of the vetl (Ce ) tngul pth wth pek t the ntl n fnl pont.... Fgue -: Jont toque of the vetl que pth wth pek t the begnnng n en of the pth... Fgue -: Jont toque of the vetl (Ce ) etngul pth wth pke when the obot hnge eton n lge pek of toque ung the ft n lt few pont.... Fgue -7: Jont poton of the vetl (Ce ) em-ul pth, whh vey mooth ne thee e no mjo eton hnge lke othe pth exmne...7 Fgue -8: Cumultve enegy onumpton of the vetl (Ce ) polynoml pth, whh vey typl fo ll of the vetl pth exmne....8 Fgue -9: Enegy onumpton of the tngul (Ce ) pth tvel tme hnge....
8 v LIST OF TABLES Tble 3-: Mofe Denvt-Htenbug Pmete fo the ABB IRB mnpulto...9 Tble -: Summy of tvel tme, tvel tne, n enegy onume fo eh pth....3 Tble -: Peent ffeene ompe to the hozontl tngul pth geomety....3
9 Chpte INTRODUCTION. Motvton Sne the ntl ebut, the ue of nutl obot h ontnue to gn populty. Robot e foun n mny fel, nlung mel, mlty, n pe exploton, n hve beome ommonple n mny lge mnuftung flte, uh utomotve ftoe. In the mnuftung nuty lone, obot e pble of numeou tk when equppe wth the pope hwe, nlung tvte uh welng, pntng, emblng, plletzng, n mtel hnlng. When ompe to humn, they e typlly muh moe elble, ute, n pble of ehng futhe, movng fte, n yng moe weght ll fo muh longe peo of tme. Inutl obot n be pogmme to o tk tht humn o not typlly wh to o, uh job tht e: epettve, known to be mey o hzou to humn, o job tht eque uh peon n tblty tht humn opeto not pble of ompletng. In oe to ompete globlly, mot mnuftue e lookng fo wy to eue ot n, t the me tme, e fng neng emn to beome envonmentlly eponble. Inutl obot oul be pt of the oluton, obot e ot effetve ove the long tem n n nee poutvty whle llowng humn opeto to fou on othe ul tk. If thee me nutl obot e nlyze n pogmme
10 efully, they oul pefom effently n uh wy tht mnmze pouton tme, tvel tne, n/o enegy onume. The nly of obot n the plnne pth oul potentlly help mnuftue poue t the lowet te of enegy onumpton poble n, n tun, ve enegy ot. Pefomne t low enegy onumpton oul lo be ueful n pplton when thee powe upply wth fnte enegy pty, uh bttey o g geneto. Anlyzng pth be on tvel tne n uen eton hnge n etly be elte to movement tht ete we on the moto. When moto nee to be eple, thee e numeou ot ntoue: pe pt ot, mntenne n ep peonnel ot, n lo of le ue to pouton owntme. Lkewe, poe o tvel tme of ptul pth n tte the pouton te. If th poe low the flty pouton pblte, thee money lot n le, o oul even men tht the opeto upevng the poe my nee to be p fo longe hou o n not move to othe pouton e. Depenng on the vou ot n pote of ptul mnuftue, one of the bove poe effeny met my hve moe peeene ove the othe.. Poblem Sttement Cone mnuftung envonment tht utomte wth n nutl obot uh x-x ABB IRB, hown n Fgue - below. The tulte obot m mut pk up pout pene t the pont (, -, ) mm. It mut move the pout to nothe pont to be boxe t (,, ) mm. Howeve, t mut vo
 f t ty n the z = mm plne n pe oun pont (,, ) mm o ) f t ty n the x = mm plne n pe bove pont (,, ) mm.")
11 3 Be fme Z (, -, ) Y X Tool fme (,, ) (,, ) Obtle (,, ) Fgue -: The ABB IRB obot wth lbele pont fo the ebe eno. fety be to pevent woke fom ehng n too loe to the pout pene. The obot m n vo th obtle n two ffeent e: ) f t ty n the z = mm plne n pe oun pont (,, ) mm o ) f t ty n the x = mm plne n pe bove pont (,, ) mm. Effetvely, Ce ttly hozontl movement, whle Ce vetl movement. Mnpulto oentton emn ontnt thoughout the ente pth n the obot follow the me pth bk to the pout pene. Th yle of opeton epete thoun of tme y. Fo fety n ftgue eon, the obot wll not opete t full pee, but t n engnee uggete pee of v, whh lmt the lne veloty of the obot mnpulto to mm/. The mnuftue ompettve fm n fng neng peue fom both envonmentlt n the fnne eptment to nee the poe effeny. Although enegy onumpton the mn
12 pth eleton te, the mngement woul lke pth to be pogmme tht lo oe not tke long tme to omplete o put unneey we on the moto by mkng the obot tvel exevely f. In othe wo, the met fo poe effeny wll nlue poe tme, tvel tne, n enegy onume..3 Ovevew of The The emne of the the ognze follow. In Chpte, elte eeh ue. Genel knemt n ynm e peente to etblh b fo wht often ue n the obot fel. Vou pth plnnng ttege e peente, long wth ltetue utlze to lulte enegy onumpton. Chpte 3 et pplton of muh of the ltetue evew to n ABB IRB obot. The methoology peente n evel geomet pth e ete, eh wth e fo hozontl movement n e fo vetl movement. Sevel type of ompute oftwe e utlze to n the mplementton of metho ntoue n the ltetue evew. Chpte peent elete gphl eult n ompe the vou pth. A entvty nly pefome on the effet of the multe tvel tme on the etmte enegy eult. Fnlly, Chpte pove onlung omment, long wth evel uggeton fo futue eeh.
13 Chpte LITERATURE REVIEW. Intouton Muh of the nfomton n the begnnng of th hpte, uh obot moelng, knemt, n ynm, ommon knowlege n the obot fel. Thee e numeou textbook on the top, uh thoe wtten o ete by Mneu, Kufe, n Cg, mot of whh hve only lght ffeene n methoologe (Mneu; Kufe; Cg). Theefoe, th hpte wll be pmly ue to gve genel ovevew of the tem n notton ue thoughout th ppe. Fo moe etle explnton, plee onult the textbook. The fnl eton n th hpte wll ummze vou wok of ltetue wth epet to pth plnnng n enegy onumpton of obot mnpulto. In Chpte 3, the genel ovevew n onept wll be etly pple to the pef eno.. Robot Moelng n Knemt Robot m ont of lnk n jont. Eh lnk n move wth epet to the peeng lnk wth the ue of ethe ottonl o tnltonl jont. A the nme mply, ottonl jont llow lnk to otte n tnltonl jont llow the lnk to pefom lng moton. A humn m, fo exmple, n be moele wth bone the
14 lnk onnete by numeou ottonl jont, uh the elbow o houle. Some obot hve jont tht nteet t the me pont, llowng wt-lke pblty (oll, pth, n yw). Futhemoe, obot m often hve n en-effeto, uh gppe, tht ml to two fnge tht n pnh n pk objet up. Oftentme, obot m wth evolute jont e efee to tulte m o nutl obot m. The emne of th ppe wll u only th type of obot. In oe to mthemtlly moel obot o tht we n know the loton n oentton of the tp of the m ompe to the be, o ny othe pont, we mut gn oonte fme to the be n tp of the obot n t eh jont. A fme tnlton wth epet to nothe fme n be ebe by the 3 x veto P +. A fme Fgue -: Compoune lnk fme, eh ebe eltve to the pevou one wth the ue of tnfomton mtx. Th onept ue to elte the be fme to the tool fme. (Imge Soue: Cg 3)
15 7 otton wth epet to nothe fme n be ebe by otton mtx R, whh 3 x 3 mtx ompoe of ot pout of unt veto. Fnlly, to ebe the tnlton n otton of fme + wth epet to fme, x homogeneou tnfomton mtx T ue wth the followng tutue: R P T. (.) To e the tnlton n otton poton of equton., ome pef meuement mut be nlue to ebe how obot fme e gne. One ommon metho to gnng the fme (n theefoe lnk epton) popely by ung the Denvt-Htenbeg (DH) notton, whh ue by utho uh Mneu. Fgue -: Lnk fme n knemt pmete of n bty jont. (Imge Soue: Cg 8)
16 8 Howeve, Cg ue mofe veon of DH notton whh wll be ue thoughout th ppe. A hown n Fgue -, the DH pmete mofe by Cg e: = lnk length, the tne fom Ẑ to ˆ Ẑ to ˆ = lnk offet, the tne fom X ˆ to = jont ngle, the ngle fom X ˆ to = lnk twt, the ngle fom Z meue long Xˆ ; Z meue bout Xˆ ; Xˆ meue long Ẑ ; n Xˆ meue bout Ẑ. (-9) The genel fom of the tnfomton mtx ung the mofe DH pmete follow: T (.) whee o( ) n n( ) (Cg 7). A tnfomton mtx lulte fo = to N, whee N the numbe of jont n the obot m. Atonlly, tnfomton mtx fom the be fme to the tp, o T N multplyng ll the tnfomton mte togethe, n oe: N, n be lulte by N T T T... T (.3) The poe known fow knemt ont of omputng the poton n oentton of obot en-effeto when ll the jont vble e known (Mneu 8). Conveely, lultng the jont vble when the poton n oentton e gven known nvee knemt. Th poblem muh moe omplex thn the fow knemt ue to the ft tht thee often ext f moe thn one et of jont ngle tht tfy the poton n oentton. Gong bk to the humn m exmple, f N
17 9 peon w holng n objet n font of themelve, they oul mntn the me poton of the fnge but oul move the houle n elbow to llow poton whee the elbow pontng up o poton whee the elbow pontng own. Regle, ome obot (lke the one ue n th ppe) e ble to be olve n loefom, menng equton n be olve nlytlly to ebe the obot. Cloe-fom oluton n be olve fo wth n lgeb o geomet ppoh..3 Jobn Mte n Robot Dynm In the obot fel, the Jobn mtx of ptl evtve tht elte jont velote to Cten velote of the tp of the m (Cg ). Th mtx ueful beue t llow u to ely lulte the veloty of the tp whle only meung the jont velote wth the ue of enoe, o eno, on the jont moto. One of the metho fo evng the Jobn by etly ffeenttng the knemt equton of the mehnm, whh tghtfow fo lne veloty (Cg ). Befoe the obot ynm o equton of moton e ee, the m tbuton of eh lnk mut be epeente to ount fo netl popete of the obot. A Hollebh eognze, oftentme, the netl popete e not known, even to the mnuftue. Thee e numeou wy to meue o etmte wht known the net teno, mny of whh e not feble fo th ppe. One uh lbo-ntenve metho to emble the obot, wegh the lnk, ounteblne fo the ente of m, n then wng fo moment of net. Anothe omewht ntenve metho nlyzng 3D CAD moel ung mtel popete n geomete. Th eon
18 metho wll be ue n th ppe, n wll be ue n Chpte 3. Fnlly, one oul etmte the netl popete ung toque eno t eh jont n ung n lgothm to olve fo the pmete. It mpotnt to note tht the net teno, enote by, C I, fo eh lnk + mut be lulte wth epet to the ente of m of tht lnk. (Hollebh -) Hvng both the Jobn n netl mte olve fo, thee e evel metho vlble to olve obot ynm equton egng moton, foe, n toque. A Nguk note, thee metho nlue the Newton-Eule (N-E) metho, the Lgnge-Eule(L-E) metho, Kne metho, bon gph moelng, well euve fomulton fo both Newton-Eule n Lgnge-Eule metho (-). The euve, o tetve, Newton-Eule metho h the vntge tht t n be pple to the obot lnk fom one en of the m to the othe povng n effent men to etemne the neey foe n toque (Nguk -). Theefoe, th metho wll be utlze n th ppe. Thee e two mjo teton: n outw teton fom the ft lnk to the lt lnk to etemne the velote n eleton n eon nw teton fom the lt lnk to the ft lnk to ompute the foe n toque tng on the ente of eh lnk. The equton fo eh teton (Cg 7) e hown below: Outw teton: : N- ˆ Z R, (.) ˆ ˆ Z Z R R, (.) ) ) ( ( v P P R v, (.),,, ) ( C C C v P P v, (.7), C v m F, (.8),, C C I I N, (.9)
19 Inw teton: : N F f R f, (.), C f R P F P n R N n, (.) T Z n ˆ. (.) The followng notton ue: : jont ngle veloty, : jont ngle eleton, m : m of lnk, : ngul veloty of lnk + wth epet to fme +, : ngul eleton of lnk + wth epet to fme +, v : lne eleton of lnk + wth epet to fme +,, C v : lne eleton of the ente of m of lnk +, F : foe tng t the ente of m of lnk +, N : toque tng t the ente of m of lnk +, f : foe exete on lnk by lnk -, n : toque exete on lnk by lnk -, : jont toque on lnk. To nlue gvty n the lulton, the mgntue of gvty n be ple n the ntl lne eleton pontng n the oppote eton: g v. (.3) Cg expln: Th fttou upw eleton ue extly the me effet on the lnk gvty woul. So, wth no ext omputtonl expene, the gvty lulte (7). The gvttonl ontnt g equl to 9.8 m/.
20 Afte ompletng the Newton-Eule teton, the jont toque wll hve been lulte fo ll jont. The ynm equton of moton n then be wtten n the fom: M ( ) V (, ) G( ) (.) whee M () the N x N m mtx of the mnpulto, V (, ) n N x veto of entfugl n Cool tem, n G () n N x veto of gvty tem. Eh element omplex funton of, the poton of ll the jont of the mnpulto, whh wll be ue n futhe etl n the followng eton.. Pth Plnnng Pth plnnng, lo efee to tjetoy geneton, the t of ebng the ee moton of mnpulto n multmenonl pe ove peo of tme. Typlly, ue wll mply efne begnnng pont, P = (x, y, z ), n n enng pont, P = (x, y, z ), n Cten pe. Then, ontolle o ompute pogm wll etemne the et of oneutve v pont to onnet the two. Wth the knowlege of the next Cten v pont χ, the ft n eon tme evtve wll epetvely eult n Cten veloty,, n eleton,, of the tp. Of oue, the v pont mut then be onvete to the jont pe poton,, wth the ue of nvee knemt. Jont ngle veloty,, n jont ngle eleton,, n be lulte ung the followng expeon: J (.) J J JJ (.)
21 3 whee J the nvee of the Jobn mtx n J the tme evtve of the Jobn (Dken 789). Plee note tht ne,, n e now known, the equton (.) fo jont toque n now be utlze. Fo ee, eehe hve tue vou metho fo lultng the v pont, nlung ung ub polynoml o plne, hgh oe polynoml, lne funton wth pbol blen, n othe pmet equton (Cg 3-9). A Cg expln, thee e multple poblem tht nee to be ee when genetng pth, nlung ntemete pont tht e unehble ue to the phyl ontnt of the obot o ue to pth tht eque jont to flp when t ehe t jont lmt, eultng n n mpobly hgh jont te (-). Sne thee nfnte numbe of pth fom one pont to nothe, futhe eeh h been one to fn optml pth ompoe of v pont ong to pef objetve. Fo exmple, muh eeh h been one n mnmzng the totl tvel tne o mnmzng the totl tvel tme of pth. In one of the fequently te publton wtten by Bobow, goo gument peente on why mnmum-tne (o length) not lwy the bet teon: In mny e th [mnmum-tne] oluton not ptl, ne mnmumtne pth e tght lne wth hp one ne the obtle ntuon. Robot moton long uh pth woul eque the veloty of the m tp to top o low own onebly t eh one. (3) In ton, mot ptl pplton n the mnuftung nuty nlue mnmzng the tme eque fo pout to be mnuftue o hnle to mxmze poutvty.
22 Hene, Bobow n mny othe exploe vou ppohe to the mnmum-tme teon poblem n the eeh. A ummze by Fel n Stepnenko, the poblem eentlly one menonl optmzton whh eek to mxmze the pee long the pth ubjet to mnpulto ontnt whh my nlue jont veloty, jont eleton, n jont toque (7). Some eehe, uh Contntneu n Coft, even ue othe ontnt uh jont jek, whh foun by tkng the tme evtve of eleton. In the wo of Fel n Stepnenko, The numbe of publton elng wth mnmum enegy pefomne te gnfntly le thn tht fo the mnmum tme poblem (7). Futhemoe, Fel n Stepnenko note tht mny utho, nlung themelve, Vukobtov n Knk, Shn n MKy, n Sngh n Leu, ll ue ynm pogmmng ppohe to olve the mnmum-enegy poblem (7). Regle of the optmzton teon, n mny of the bove e, utho hve expee onen ove the omputtonl tme eque to olve optmzton poblem of even mple obot of one o two jont. Inte of olvng omplex n omputtonlly ntene optmzton poblem, one ppoh tken by Dken to multe mny pth n then nlyze n ompe the enegy onume. Dken ue nuol pth wth vyng mpltue to ebe the mnpulto pth ove mple hmon tme funton, whee pont χ between the ft n lt pont (P n P ) n be expee wth the followng fomul: x x y y z z x x t o( ) y y. (Dken 789) (.7) t f z z
23 Sne the pth e ebe funton of tme, tme t hnge fom to t f, wth T numbe of fnte tme ntevl ong to: t f t t fo = to T. (.8) T The powe equement fo gven jont ung pef tme ntevl gven by: W fo ll = to N jont fo eh tme ntevl. (.9) The totl powe equement fo the mnpulto t gven tme ntevl lulte : N W W ( t) fo ll t = to t f. (.) Fnlly, the enegy onumpton fo the pth the ntegl of the totl powe ove ll tme ntevl: E t f W ( t) t. (Dken 79) (.) In wo, the totl enegy onume the tme ntegl of the um of the bolute vlue of the ontol toque.
24 Chpte 3 METHODOLOGY 3. Intouton A lge poton of th hpte mnly evote to et pplton of the tn obot moelng methoologe ebe n Chpte to n ABB IRB, onventonl tulte m obot. It neey to eve the vou knemt n ynm equton n oe to mthemtlly ebe th ptul obot befoe ny lulton n be pefome. Sne mny of the lulton n beome qute omplex vey qukly, key umpton me n Seton 3.. egng whh jont wll be nlyze n th ppe. Th umpton getly mplfe the lulton n the ubequent Seton 3..3 though 3..7, nvolvng top uh fow n nvee knemt, the Jobn mtx, n the tetve Newton-Eule equton fo fnng jont toque. Seton 3.3 getly efne the poblem by plnnng pth of fve vou geomete, whh wll eh hve two e: hozontl pth n vetl pth. Thee pth ont of evel pont, whh wll be pogmme nto the obot ontolle ung ABB obot lnguge lle RAPID n Seton 3... Ung ABB RobotStuo ebe n Seton 3.., the RAPID pogm n be multe to fn the totl poe tme n vefy jont ngle.

25 7 Fnlly, Seton 3. ummze the MATLAB pogm wtten whh wll ue the equton of the obot eve ele n the hpte, well the multon eult, to pply Dken metho of lultng the enegy onumpton une el onton. 3. Moelng the ABB IRB Robot The ABB IRB -x nutl obot tht ntene to be hghly ptble to mny envonment n pplton. A note n the pout pefton oument, thee e mny optonl fetue, uh Founy poteton fo hh, hgh tempetue envonment, Clen Room lfton fo hgh egee of ooon poteton n the blty to wh, n mny othe fetue fo pplton uh glung n welng. The IRB the mot ompt obot mnuftue by ABB n h hnlng pty of kg. Fgue 3-: The IRB h xe. (Imge Soue: IRB Pout Spefton)

26 8 3.. Notton n Mofe Denvt-Htenbug Pmete A mentone n Chpte, ommon metho to ebe the fme loton n the obot jont n lnk to ue Denvt-Htenbug (DH) pmete. The mofe veon ebe by Cg wll be ue n th ppe. Fgue 3- how the fme gnment loton n obot menon. Tble 3- ply the fou pmete fo eh lnk:,,, n. Fgue 3-: Knemt pmete n fme gnment of the ABB IRB mnpulto.
27 9 Tble 3-: Mofe Denvt-Htenbug Pmete fo the ABB IRB mnpulto. α - - θ θ 9 θ 3 θ 3 9 θ -9 θ 9 θ = 3 mm; = 7 mm; = 3 mm; = 38 mm; = mm 3.. Aumpton A hown n Fgue 3-, jont,, n ll nteet t one pont. Th pont wll be efee to the wt ente, ne t h the blty to oent the mnpulto tp n wt-lke fhon wth oll, pth n yw. It houl be ponte out tht the poton of the wt ente (p xw, p yw, p zw ) n be lulte hvng only the lnk length n the jont ngle of lnk, n 3. The poton of the tp of the mnpulto (p x, p y, p z ) n be lulte vey mply, n wll be ue n Seton Ung the wt ente mplfe the fow n nvee knemt (Seton 3..3 n 3..), but moe mpotntly, getly eue the lulton neee fo the obot ynm, epelly the tetve poe eque fo jont toque (Seton 3..) Jont toque then ue to lulte the enegy onumpton (Seton 3.). Theefoe, th ppe wll only nlyze the ft thee lnk of the obot. Th mplfton jutfe by thee not beng muh movng m pt the wt ente ompe to the ft thee lnk, well the ft tht
28 the emnng m pt the wt ente wll be nlue n the lnk 3 ente of m n netl lulton (Seton 3..) Fow Knemt Fow knemt ue to fn the poton of the mnpulto gven the jont poton, whh eltvely mple poblem one the DH pmete e known. Ung Equton (.) fo eh ow of Tble 3-, one n fn the multple tnfomton mte hown n Appenx A. Next, Equton (.3) n be ue to multply ll of the mte n oe to lulte T, o the tnfomton mtx tht ebe the tnlton n otton fom the be of the obot to the wt ente: zw yw xw p p p T whee:. ] [ ] [ ) ( ] [ ] [ ) ( ] ) ( [ ] [ ] [ ) ( ] ) ( [ p p p zw yw xw (3.)
29 To lfy notton, = o(θ ) n = n(θ + θ 3 ), et. Plee note one gn, tht the equton ebng the poton of the wt ente (p xw, p yw, p zw ) only nlue jont poton fom jont,, n 3. If one whe to etemne the bolute tp of the mnpulto, t mply tnlton of length long the z x of fme wth epet to the be fme : p p p x y z p p p xw yw zw (3.) 3.. Invee Knemt Invee knemt the poe of lultng the jont poton, gven the mnpulto poton. Unlke fow knemt, nvee knemt muh moe hllengng ue to the ft tht multple oluton my ext. If ll x jont wee onee, up to oluton oul ext fo ny gven poton. Fo obot wth egee of feeom wth wt, t ommon to bek the nvee knemt poblem nto two. The ft pt geometl oluton to fn the jont ngle oeponng to the poton of the wt ente, whle the eon n nlytl oluton to fn the ngle oeponng to the wt oentton. A geometl oluton fo the ft thee ngle of the IRB eve by Vente (7-) wll be ummze hee, whle the emnng nlytl oluton n be foun n Appenx B ne t wll not be neee n th ppe.
30 Fgue 3-: Pojeton of the wt ente onto the xy plne. (Imge Soue: Vente 8) To fn the ft jont ngle (θ ), we n exmne top own look t the obot n Fgue 3-. A the ft jont ngle hnge, the whole mnpulto move n hnge the x n y poton of the wt. Theefoe, ung the tngent funton, we n eve two oluton fo θ (one of the oluton beng when both wt poton e negtve): p tn yw tn ( p yw, pxw ) p (3.3) xw OR p yw tn tn ( pyw, pxw) p. (3.) xw To fn the eon n th jont ngle (θ n θ 3 ), we one the plne fome by lnk n 3 (Fgue 3-3). Ung the Lw of Cone whle tkng nto ount θ : o 3 p o( ) p n( ) p xw yw zw D. (3.)
31 We oul olve fo θ3 wth θ3 = o-(d), howeve, to ount fo the two elbow-up n elbow-own oluton: D 3 tn D tn ( D, D) (3.) Smlly, tn p zw, p xw o( ) p yw n( ) tn ( n( 3 ), o( 3 )). (3.7) Fgue 3-3: Pojeton onto the plne fome by lnk n 3. (Imge Soue: Vente 9) The emnng jont ngle n be olve nlytlly ung loe-fom equton whh e eve n Appenx B. Sne wt poton etemne by the ft thee jont ngle, the emnng jont ngle wll not be ue n th ppe.
32 3.. Inet Teno A ue pevouly, the m tbuton neee to lulte the obot equton of moton. The metho ue to obtn the netl t fo th ppe v 3D CAD moel whh pove n etmton ung fto uh geomety. The 3D moelng oftwe ue to nlyze CAD moel of the lnk wll be SolWok. The CAD fle of the ABB IRB n be ownloe fom the mnuftue webte. One the embly of ll the IRB lnk loe, oonte fme e e whh oepon to the oentton n loton of the fme hown n Fgue 3-. Next, the ptul lnk of nteet elete (hghlghte) n the M Popete funton of SolWok un. An output wnow, hown n the eenhot n Appenx C, ply the loton of the ente of m wth epet to the fme equete n the C, net teno mte I fo eh lnk + wth epet to the ente of m of tht lnk. Due to the umpton tht th ppe wll only nlyze the ft thee lnk, the th lnk unque n tht t ount fo the emnng m pt the wt ente. In othe wo, lnk 3,,, n e ll elete n ombne nto lnk 3. They e ll onee to move one lnk whle θ 3 hnge. It houl be tee tht the lulton of the net teno ung CAD moel n etmton.
33 3.. The Jobn Mtx The Jobn mtx neee n oe to elte jont velote n Cten velote. In Seton 3..7, we wll u how Cten pont e elete on pth, whh mut be elte to jont velote o the jont toque n othe vlue n be lulte. One metho to eve the Jobn mtx to etly fn the ptl evtve wth epet to tme of equton tht ebe the Cten poton funton of jont ngle (Equton 3.): 3 ) ( t p xw (3.8) 3 ) ( t p yw (3.9) 3 t p zw (3.) Rewtng thee equton nto mtx fom eult n the Jobn fo lne veloty: 3 3 ) ( ) ( J x. (3.) In ml fhon, by ompletng nothe et of ptl evtve one n etemne the evtve of J, wtten. J
34 3..7 Robot Dynm Ung the tetve Newton-Eule metho (Equton.-.) fo obot wth mny egee of feeom beome omplex vey qukly. The eultng loe-fom equton fo toque hve been eve ung MATLAB, but n ltelly be pge long, n fo th eon they e not nlue. Inte of expeng the toque equton n loe-fom, MATLAB oe (ee Appenx F) h been wtten to olve fo toque numelly n muh moe omputtonlly effent. The tetve Newton-Eule metho mut be pefome numeou tme pe pth, t mut be pefome t eh tme ntevl. Th loop event n flowht of MATLAB oe hown n Seton Pth Plnnng Pth plnnng tl tep n th ppe ne t efne whh pont the obot mnpulto wll p though when movng between the tt n en pont. Often tme th poe wll be lulte utomtlly be on ome mnmzton te whle ung nvee knemt n the Jobn mtx to onvet Cten pth pont to jont ngle. The pogm mut mke ue tht ll pont on the pth e ehble n o not eque unobtnble velote o eleton. Fo eh pont t mut lo hve metho to hooe one of the mny nvee knemt oluton. In th e of th ppe, we woul lke to foe the obot to move long etn pth n, theefoe, pth plnnng wll be pefome mnully n eh pont wll be npete to enue tht ll of the bove mentone onee.
35 Vou Pth Geomete Fve pth geomete e exmne n th ppe: tngul, que, etngul, em-ul, n th egee polynoml. Fo Ce, the me pth geomete e exploe but wll be vetl nte of hozontl. The pth tne, whh e mply lulte ung length fomul o b pemete metho, e the me fo both e of eh geomety. The tt n top pont lo one. In the em-ul n polynoml geomete, the pth efne by funton of the y poton. The emle equton eve fom the equton of le wth u n entee t (h, k), ( x h) ( y k), (3.) whh n be ewtten to be x ( y k) h. (3.3) Ung ethe the + o only eult n em-le. Lkewe, the polynoml of fou egee n be wtten n tn fom uh : x y by 3 y y e, (3.) whee, b,,, n e e ontnt tht n be olve fo wth known oonte. In the emnng geomete, you my note tht the pth oul be efne n f fewe pont ne they e ompoe of lne movement. The eon fo the ext pont to llow equl tme ntevl o tht t eh pont, the poton of the jont ngle n ely be lulte, llowng the jont veloty n ubequent lulton to be pefome fo eh ntevl. All fve pth geomete, well the two e fo eh, e hown n Fgue 3- though Fgue 3-8 below.
36 8 Fgue 3-: Tngul pth fo Ce (hozontl pth) n Ce (vetl pth). Fgue 3-: Sque pth fo Ce (hozontl pth) n Ce (vetl pth).
37 9 Fgue 3-: Retngul pth fo Ce (hozontl pth) n Ce (vetl pth). Fgue 3-7: Sem-ul pth fo Ce (hozontl pth) n Ce (vetl pth).

38 3 Fgue 3-8: Polynoml pth fo Ce (hozontl pth) n Ce (vetl pth). 3. Pogmmng n Smultng the ABB IRB Robot RobotStuo n offlne pogmmng oftwe me by ABB, the me ompny whh mnuftue the IRB obot. The ntent of the oftwe to llow obot ue to pogm n multe the obot on ompute, the thn hvng to pogm n tet un on the tul obot, whh often men obot owntme o lot poutvty. Aong to ABB, RobotStuo bult on n ABB Vtul Contolle tht n ext opy of the el oftwe tht un the ABB obot.
39 3 3.. Pogmmng Ung RAPID Both the ABB Vtul Contolle n the tul obot ontolle opete wth the pogmmng lnguge, known RAPID. RAPID hgh-level pogmmng lnguge whh, lke mny othe lnguge, ue mny Englh wo ommn. Although t pble of mot typl hgh level funtonlte, uh FOR loop n IF/THEN ttement, they wll not be neee n th ppe. Inte, RAPID wll be ue metho to ontol the moton of the obot by pogmmng pef pth pont, veloty, n movement opton. Wthout elvng nto too muh etl, thee e two mn ommn tht e ue n the RAPID pogm fo th ppe: the t type obtget n the funton MoveL( ). Ung obtget llow pef pont, o tget, to be pogmme nto the ontolle memoy n n be elle by nme, uh p. Th t type toe x, y, z oonte, oentton, n othe xe ngle not neee hee. MoveL( ) n then be ue to move the obot n lne moton fom tget to tget. The yntx : MoveL ToPont Spee Zone Tool; whee ToPont pef obtget, Spee one of the peefne velote, Zone efne how loe the mnpulto nee to get to the tget, n Tool ebe whh tool, f ny, on the mnpulto. A typl MoveL( ) ommn mght look lke the followng: MoveL p, v, fne, tool; The gument v peefne mxmum pee of mm/, fne men tht the mnpulto mut extly p though the pont ( oppoe to n gument uh z whh llow the mnpulto to m the tget by mm), n tool the
40 3 efult gument menng tht no tool tthe. Note tht zone of z n lo be ue n the ple of fne, whh n help eult n moothe tnton between tget. Fo moe etle nfomton on thee funton o RAPID, efe to the Intouton to RAPID mnul (ABB Robot AB, Opetng Mnul ). Smple RAPID oe ue n th ppe n be vewe n Appenx E. 3.. Smultng Ung RobotStuo Afte wtng RAPID oe, mnly ontng of the bove mentone ommn numeou tme (llng eh one fo evey pth pont), multon n be un ung RobotStuo. Th multon gve gphl vlton tht the RAPID oe w pogmme oetly to follow the ee pth. In ton, RobotStuo h n opton to lulte the poe tme of pef event ung the multon. Th opton w enble to fn n etmte of the totl tvelng tme of the obot fom the tt to en pont long the pefe pth. Note tht th tvelng tme not neely the mnmum tvel tme fo the pth ne veloty lmte n the RAPID oe. Hvng the totl poe tme, o t f of Equton.8, gve goo wy to ompe n evlute the pefomne of vou pth geomete. Moe mpotntly, t neee to lulte the length of the equl tme ntevl (Equton.8) ne thee known numbe of pont ompong pth n the pont e hoen to ppoxmtely meet th umpton of equl tme ntevl. Knowng the length of the ntevl mke t poble to lulte vble, uh jont veloty, eleton, toque, n enegy onume pe tme ntevl.



41 33 3. Clulton of Conume Enegy Clultng the ext mount of onume enegy vey ffult tk, ne thee e mny tonl vble tht woul nee to be moele, nlung fton n we o ftgue n the moto, eletl popete, n othe nomle. Theefoe, lulton of onume enegy fo el onton e pefome ung Dken ppoh outlne by Equton.8 though.. Thee equton e mplemente n the MATLAB oe whh vlble n Appenx F n ummze n the flowht below. Fgue 3-9: MATLAB flowht.
42 3 Chpte RESULTS. Intouton Th hpte ue the outome of the multon n lulton pefome n th ppe. In Seton., n ovevew gven of the MATLAB gphl eult n tble ummze the numel eult fo ll pth. Seton.3 n. ompe n nlyze pef pth geomete wthn Ce n, epetvely. Sne the tvel tme fo eh pth wee etemne by multon, Seton. vlte n pefom entvty nly on the tvel tme fo ptul pth. Seton. mke pth eommenton be on etn poe effeny met n Seton.7 follow wth genel obevton tht n be ue ttng pont when plnnng pth.. Reult The MATLAB Coe, ebe n the pevou hpte, h been un fo ll pth nlyze. The eult e hown n Tble - n e ompe to the hozontl tngul pth n Tble -. Eh tme the oe un, t ply x gph fo the followng vble veu tme: jont ngle poton, jont veloty, jont eleton, jont toque, jont powe, n umultve enegy onumpton. Due to the ze n numbe of gph, ll e hown n Appenx G wth only elete gph (typlly jont toque o powe) hown wthn th hpte. The gph of jont ngle poton, jont
43 3 veloty, n jont eleton e pmly fo vefton pupoe to mke ue eoneou t pont e not event n to mke ue tht the obot not movng o eletng fte thn the pefton lmt. Fo exmple, the jont onee e not pble of veloty of moe thn /, o 3. n/. The emnng gph e muh moe nteetng! The jont toque gph how whh jont e moe ffete by gvttonl foe, epelly when n poton extene f wy fom the obot ente of gvty. It lo uully vey event when thee uen hnge n the eton of the obot by the pke() n toque. The jont powe gph lo nteetng, ne t how whh pt of the pth eque the mot powe. Muh of the powe gph e petble, howeve, thee e ome pont whee toque hgh but powe muh lowe thn expete. Th typlly ue to the jont movng vey lowly n the ft tht powe lulte the pout of the two (Equton.9), eultng n low powe. Fnlly, the umultve enegy onumpton gph gve goo pepetve of whh egment of the pth emn the mot enegy. Sne the enegy onumpton Tble -: Summy of tvel tme, tvel tne, n enegy onume fo eh pth. Pth Geomety Ce Type Tvel Tme, tf (e) Tvel Dtne(mm) Totl Enegy Conume (J) Tngul Ce - Hozontl Sque Ce - Hozontl..83 Retngul Ce - Hozontl Sem-Cul Ce - Hozontl Polynoml - Ce - Hozontl Tngul Ce - Vetl Sque Ce - Vetl. 8. Retngul Ce - Vetl Sem-Cul Ce - Vetl Polynoml - Ce - Vetl
44 3 Tble -: Peent ffeene ompe to the hozontl tngul pth geomety. % Dffeene Tvel Tme % Dffeene Tvel Dtne % Dffeene Totl Enegy Conume Pth Geomety Ce Type tf Tngul Ce - Hozontl Sque Ce - Hozontl Retngul Ce - Hozontl Sem-Cul Ce - Hozontl...3 Polynoml - Ce - Hozontl Tngul Ce - Vetl.. 9. Sque Ce - Vetl Retngul Ce - Vetl Sem-Cul Ce - Vetl...8 Polynoml - Ce - Vetl... the ntegl, o e une the uve, wth epet to tme, nothe wy one n get ough etmte of the e whee lot of enegy onume by lookng t pek n the powe equement gph. The nly of the emnng poe effeny met muh le omplex. A note pevouly, the tvel tne w etemne by lultng length fo the pth efne by funton n by b pemete lulton fo the emnng pth. The poe tvel tme w etemne by multon of the pth n RobotStuo. All of thee eult e lo hown n Tble - n ompe to the hozontl tngul pth n Tble -. It ppe though thee e ome oelton between ome met, but thee e etnly ome exepton. Moe etl wll be gven n the followng uon.
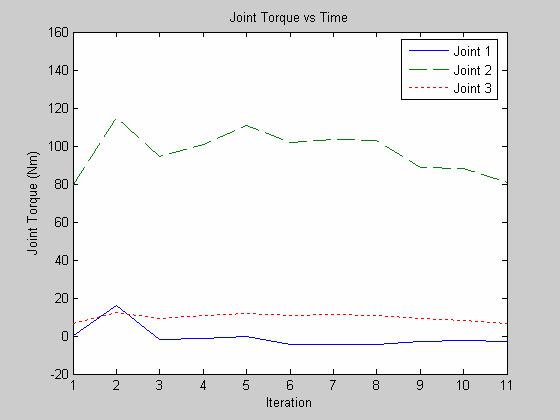
45 37.3 Ce Duon One my note tht fo ll of the hozontl pth n Ce, Jont expeene muh moe toque thn the othe jont. Th logl ne Jont eponble fo mot of the ehng of the obot, n the obot ehe futhe out wy fom the ente of gvty, thee toque ete by gvty n the m of the emnng lnk. It the jont h hgh veloty t thoe me pont of hgh toque, lge mount of powe eque. It houl lo be ponte out tht both the hghet n lowet enegy onumpton of ll pth exmne e foun wthn Ce, uggetng tht hozontl move e not lwy le enegy onumng thn effent vetl pth. Regng the eltonhp between tvel tne o tvel tme n enegy onume, thee ppe to be oelton epelly n Ce but thee e exepton. Fo exmple, the tngul n em-ul pth e mong the pth wth the hotet tvelng tme n tne, whle onumng the let mount of enegy. Howeve, the em-ul pth h longe tvel tne thn the polynoml, but took le tvel tme n le enegy. Nonethele, th eltonhp le to genel obevton expee futhe n the ppe (Seton.7)..3. Tngul Pth Geomety Hvng the hotet tvel tne of 77 mm, t not bg upe tht the tvel tme lo the hotet t. eon. In the hozontl e, the tngul pth lo onume the let enegy of ll pth exmne t 7.9 J. In exmnng the toque
46 38 gph, thee e pke of toque n the begnnng of the pth n ght fte the pek of the tngle, whh mke ene beue of the uen hnge n eton. It woth notng tht the totl powe level fo ll jont (Fgue -) lo h omewht tngul uve (mnly ue to Jont ), uggetng tht the obot onume the mot enegy when the m ehe out the futhet. Fgue -: Powe equement of the hozontl tngul pth lo follow omewht tngul uve..3. Sque Pth Geomety Wth the que pth geomety, t vey le n lmot ll of the gph whee the obot hnge eton. In vble uh jont eleton n jont toque
47 39 (Fgue -), thee e pke when ft ttng the pth, n then tonl pke when the pth hnge t ght ngle. Inteetngly, ung the pth between the two ght ngle, Jont expeene hgh toque but h loe to zeo veloty, eultng n lttle powe eque n the mle of the pth. It when Jont move out n then bk n tht eque hgh pek n powe ne thee hgh toque n non-zeo veloty, whh eult n the pth tht the hghet n enegy onumpton t.83 J. Not only the que pth hghet n enegy onumpton, but t lo eque the longet tvel tne t mm n one of the longet tvel tme t. eon. Hene, th pth not vey eble n ny effeny met. Fgue -: Jont toque of the que pth (Ce ) wth pke t hnge n eton.
48 .3.3 Retngul Pth Geomety In eg to pke n vble, the etngul pth even woe thn the que n tht t h fve pke ue to the ntl tt n fou ght ngle move. The powe equement, expete, e not tebly ffeent thn the hozontl que pth exept tht the pek powe pke e move loe togethe. Aftell, the obot oe not move wy fom the be untl the mle of the pth. Lke the que pth, thee peo of vey lttle powe emne (n theefoe lttle tonl enegy onumpton) when t the futhet pont wy, whee the hghly toque Jont oe not move n Fgue -3: Jont powe equement of the hozontl (Ce ) etngul pth wth pek of powe when the obot ue Jont to move wy n tow the be.
49 Jont mply otte the obot. Th hown n Fgue -3 between teton n. Alo lke the que pth, the tvel tne te t the lget length of mm n eque the longet tvel tme of.3 eon to omplete..3. Sem-Cul Pth Geomety The em-ul geomety genete pth tht vey mooth, not only n poton but n mny othe gph, n h only one mno pke n the gph fo when the obot begn movng. Howeve, ne thee pke n veloty n pke n toque, the eult hgh powe equement n the ft few pont. Regle, the tvel tme, tne tvele, n enegy onume n e ll vey ompble to tht of the bet pth (tngul Ce ) only.%,.%, n.3% lge thn the tngul Ce pth. Theefoe, the em-ul pth len telf to beng goo ltentve to the tngul pth..3. Polynoml Pth Geomety The polynoml geomete pove mooth jont poton, but pogevely get hoppy when tkng ft n eon evtve fo jont veloty n eleton. The powe uve look vey ml to tht of the etngul Ce (Fgue -3), but of lghtly le enegy onume ompe to the etngul pth. It pobble tht pmet equton of poton woul help the moothne of the veloty n eleton uve. In tem of enegy onumpton n tvel tne, the polynoml
50 ompe epetbly to the tngul Ce pth, but the tvel tme % lge t 3. eon. Although the tvel tne lghtly hote thn the em-ul pth, the polynoml pth tll eque lghtly moe tvel tme n enegy.. Ce Duon In Ce, whee vetl pth e exmne, thee of the fve vetl pth eque moe enegy thn the me hozontl pth n Ce, howng tht oveomng the effet of gvty my eque moe powe. The emnng two geomete e que n etngul pth, but n Ce, the pth move long muh loe to the ente of gvty n not n n extene poton n Ce. In genel, pth n Ce hve hgh pek of toque fo Jont n the ft n lt few pont n vey lttle toque n the mle of the pth. Th unlke mot pth n Ce, whee the Jont toque w omewht hgh ove the ente pth. The eon fo th outome ue to the poton n movement of Jont n Ce : ft, thee n upw movement gnt gvty, then the obot n upght poton n the mle of the pth, n fnlly the obot movng ownw wth gvty n mut low own to emn on the pth. When n the mle of the pth, the obot loe to beng bove the ente of gvty n thu le toque exete on the jont. The hgh toque n the ft n lt few pont mke the powe uve pek loe to the ege of the gph ompe to mot of Ce pth. Nonethele, the powe uve look ml n tht they op to ne zeo n the mle, thee not muh jont veloty o toque t tht pont n the pth.
51 3 Regng the eltonhp between tvel tne o tvel tme n enegy onume, t muh moe ffult thn t w fo Ce to y tht thee oelton. It lkely tht ne ll of the vetl pth opete t loe poxmty to the obot be ( oppoe to ehng f out fo ome of the hozontl pth), the hnge n enegy mong the vetl pth e ll le thn %. Pehp fo vetl pth, the loton of the pth my hve moe of n mpt thn the tvel tme o tne of the pth... Tngul Pth Geomety Although the tngul pth onume the let enegy of ll the pth n Ce, t w one of the hghe enegy onumng pth n Ce. The hgh ntl n fnl toque on Jont ete hgh powe equement, ue pevouly. The powe uve hown n Fgue - n qute the oppote of the tngul Ce powe uve (Fgue -). Alo qute the oppote how the tngul pth nke mong the enegy onume fo the vetl pth. Although the pth tll tke only. eon ove 77 mm, the enegy onume 83.9 J, whh the eon hghet mong Ce.
52 Fgue -: Powe equement of the vetl (Ce ) tngul pth wth pek t the ntl n fnl pont... Sque Pth Geomety The que pth geomety n Ce vey ml to Ce n tht lmot ll of the gph lely how whee the obot hnge eton. It lo ml to Ce n tht ung the pth between the two ght ngle, Jont expeene hgh toque (Fgue -) but h loe to zeo veloty, eultng n lttle powe eque n the mle of the pth. It when Jont move up n own tht eque hgh pek n powe ne thee hgh toque n veloty. Th hown n the ft n lt few pont, ne th whee the obot ffete by gvty mot. Thoughout the pth, Ce h muh le
53 Fgue -: Jont toque of the vetl que pth wth pek t the begnnng n en of the pth. toque thn Ce ue to the ft tht the m opete muh loe to the obot be. Lke n Ce, the que pth n Ce h the hghet enegy onumpton of the vetl pth, the longet tvel tne t mm n one of the longet tvel tme t. eon. Hene, th pth lo not vey eble n ny effeny met...3 Retngul Pth Geomety A mentone pevouly, n pth wth mny eton hnge, thee e vey event pke n the vou gph. Whle the powe gph look ml to the hozontl etngul pth, the toque gph (Fgue -) how ml htet
54 Fgue -: Jont toque of the vetl (Ce ) etngul pth wth pke when the obot hnge eton n lge pek of toque ung the ft n lt few pont. mot othe Ce pth o wth Jont ppng n the mle of the pth well evene of pke ue to hnge n eton. Atonlly, ue to the pth geomety, Jont oe not move ung the ft n lt few pont. Th the me e whee Jont hgh n toque, yet ne powe the pout of the veloty n toque, the powe tully mnml t thee tge. Fo th eon, the onume enegy fo th pth the lowet of ll the Ce (vetl) pth t 7.78 J. The ownfll wth th pth tht t h the longet tvel tme of.3 eon n the lget tvel tne of mm. Unle the mnuftue only onene wth mnmzng enegy, th pth not lkely hoe.
55 7.. Sem-Cul Pth Geomety The em-ul geomety, one gn, genete pth tht vey mooth (Fgue -7), not only n poton but n mny othe gph. Due to the hgh toque n the ft n lt few pont, the powe gph h pek tht e pe pt fom eh othe. Depenng on the gol n ot of the mnuftue, the em-ul pth my be moe fvoble ove the etngul Ce, epte the lte beng the vetl pth of lowet onume enegy. Fo exmple, f tvel tme, tne n hnge n eton wee moe mpotnt thn enegy onumpton, the vetl em-ul pth woul Fgue -7: Jont poton of the vetl (Ce ) em-ul pth, whh vey mooth ne thee e no mjo eton hnge lke othe pth exmne.
56 8 pobbly be pefee ove the vetl etngul pth ne the tvel tme gnfntly lowe, the tne hote, thee e no uen hnge n eton, n the enegy onumpton only % lge thn tht of the etngul pth... Polynoml Pth Geomety A n Ce, the polynoml geomety pove mooth jont poton, but pogevely get hoppy when tkng ft n eon evtve fo jont veloty n eleton. Even o, the powe uve look vey ml to mot of thoe n Ce. Fgue -8: Cumultve enegy onumpton of the vetl (Ce ) polynoml pth, whh vey typl fo ll of the vetl pth exmne.
57 9 The umultve enegy uve hown n Fgue -8, theefoe, look vey typl fo the vetl pth, wth lge enegy onumpton n the me e pek powe equement n lttle enegy onumpton n the mle of the pth. Although the pefomne of the polynoml pth goo n tht t h no uen hnge n eton, the pefomne of the pth only meoe n tem of tvel tme, tvel tne, n enegy onumpton.. Tvel Tme Vlton n Sentvty Anly The tvel tme bove wee foun fom unnng multon fo ll of the pth n RobotStuo. Due to the ft tht multon o not lwy ount fo el-wol eno, RAPID pogm wee loe n n on n tul ABB IRB obot to vlte the eult. Futhe nly w pefome on the hozontl tngul pth ne t w the ftet n let enegy onumng pth. When unnng the multon, the tvel tme to be. eon, whee when tme on the tul obot wth topwth, the tvel tme w ppoxmtely. eon. The tul tme w muh hghe thn ntpte, o entvty nly w pefome to ee the effet of uh n eo on the MATLAB eult. Inteetngly, the enegy hnge between tvel tme of. n. bout joule le, o euton of only %. Ineng the tvel tme n the MATLAB oe hnge the length of the tme ntevl, but woul keep the hnge n jont poton the me. Th woul theefoe eult n lowe jont veloty n eleton n the gph. At etn pont, jont toque n totl enegy onumpton e mpte le n le. Fgue -9 how tht fte 3 eon, the
58 enegy uve begn to ppoh wht ppe to be hozontl ymptote. Conveely, the tvel tme ppohe zeo, the enegy lulton e enomouly, t houl, ne vey ft pth woul eque the jont to move n elete muh moe thn the moto pblte. Of oue, thee ome mnmum tvel tme be on phyl ontnt tht wll pevent the tvel tme fom beng extemely ft. Cuton houl be ue when ung the RobotStuo tvel tme, ne t ten to uneetmte the tul tme n, f too low, oul ue the enegy eult to be muh hghe. In th ptul pth, the uneetmte oe not hve gnfnt mpt on the enegy lulton. Fgue -9: Enegy onumpton of the tngul (Ce ) pth tvel tme hnge.
59 . Reommenton If tvel tme h gnfnt mpt on the pouton te o the poe nee to be omplete qukly poble, t mke ene to hooe the pth wth the ftet poe tme. The two pth of lowet tvel tme e the tngul n em-ul pth. If moto lfe n eplement mjo onen o ot, the em-ul pth e eommene ne they hve no uen hnge n eton lke mot othe pth (wth the exepton of the polynoml) n o not tvel unneely f. The emul pth hve ne mnmum tvel tme n tne, n ontently nk t the eon let enegy onume fo both the hozontl n vetl e. If the totl enegy onume the lget ot o nttve, the hozontl tngul e eommene. Although t h one uen hnge n eton, t tll h the mnmum tvel tme, tvel tne, n enegy onume of ll the pth exmne n th ppe..7 Genel Obevton Whle t ffult to ebe evey ngle nomly n the eult of th ppe, thee e evel genel obevton tht oul be gue ung phy n the ten of the eult. A expete, pth of the hotet tne wll genelly eult n pth tht tke the hotet mount of tme to tvel. Th mke ene beue thee n gne n lmte lne veloty tht the obot wll ty to obtn wheneve poble,
60 n fo the me veloty, hote tne wll tke le tme thn longe tne. The hotet tne between two pont tght lne, whh hown by the tngul pth ompoe of two tght lne. The eult the pth whh h the hotet tvelng tne n the hotet tvelng tme. It n lo be gue tht lowe tvel tme wll genelly eult n lowe mount of enegy onume. The eult of Ce eem to emontte th: tvel tme nee, o oe the enegy onumpton. Th n be explne by the ft tht enegy the tme ntegl of powe n f obot moto output omewht ontnt mount of powe (o mxmum powe), hote tvel tme wll eult n le enegy onume. Of oue, the moto e not lwy t ontnt o mxmum powe n long tvel tme of low powe oul eult n le enegy ompe to hot tvel tme of mxmum powe. Pth of numeou uen hnge n moton, uh the etngul pth, houl be voe f poble to eue the we of moto. It vey event n the MATLAB gph whee the hnge ou by the pke n vble uh eleton n toque. On the othe hn, pth uh the em-ul geomety hve no pke exept fo the ntl tt-up movement.
61 3 Chpte CONCLUSIONS AND FUTURE RESEARCH. Conluon Compne e lwy lookng to ve money n e beng peue to beome envonmentlly onou. One uh metho to ehng thee gol to nee poe effeny of mnuftung mhne, uh nutl obot, whle not peventng them fom omplhng wht they wee egne to o. Th tuy h exmne vou pth geomete tht obot mnpulto n move long, fom tt poton to gol poton whle umventng n obtle long the wy. Fo eh of the fve pth geomete, two e wee nlyze: Ce w pth tht move ttly hozontlly whle Ce w the me pth n vetl moton. Eh pth w then evlute n ompe by the mount of enegy onume, the tvel tme n the tne ove the ente pth. Of ll pth exmne, tngul pth movng hozontlly howe to onume the let mount of enegy whle lo equng the let mount of tvel tme n tvel tne. Among only the vetl e, the etngul pth onume the let mount of enegy, but h the longet tvel tme n tne. Howeve, epenng on the gol n ot of the mnuftue, othe pth my be hoen to mnmze etn teon. Fo exmple, f tvel tme, tne n hnge n eton wee onee moe
62 mpotnt thn enegy onumpton, the em-ul pth woul pobbly be pefee ove the etngul pth n the vetl e. Th beue em-ul tvel tme gnfntly lowe, the tne hote, thee e no uen hnge n eton, n the enegy onumpton only % lge thn tht of the etngul pth. The tvel tme, whh w pete by multon n vlte by tmng the tul obot, w nlyze to etemne the effet the eo h on enegy onumpton. It w uggete tht uton houl be exee when ung the RobotStuo pete tvel tme, ne t ten to uneetmte the tul tme. If the tvel tme nlyze t too low of numbe, t oul eult n vey eoneou enegy lulton. Howeve, eonble o low tvel tme eult n n enegy lulton tht not vey entve. In the e of the eommene hozontl tngul pth, the uneetmte not hve gnfnt mpt on the enegy lulton. Whle t ffult to ebe evey ngle nomly n the eult of th ppe, thee wee evel genel obevton tht oul be gue ung phy n the ten event n the eult: ) Pth of the hotet tne wll genelly eult n pth tht tke the hotet mount of tme to tvel; ) Pth of hote tvel tme wll genelly eult n lowe mount of enegy onume; 3) Pth of numeou uen hnge n moton, uh the etngul pth, houl be voe f poble to eue the we of moto. Thee genel obevton o not lwy hol tue, but n ue ttng pont n the pth plnnng tge of pogmmng obot m.
63 . Futue Reeh The wok elte to th the le to numeou eton fo futhe eeh. One obvou extenon woul be to vlte the powe equement o enegy onumpton wth n eletl eve, uh powe o uent pobe, n log the t ove tme the obot move long vou pth. Th w ttempte n th eeh but pove to be qute tehnl n etemnng whh we n the obot ontolle woul nee to be meue. Theefoe, n expeene tehnn n wng gm fo the ontolle woul be neee. Anothe extenon woul be to futhe exmne ome of the pth n th ppe by eplng the hp hnge n eton wth of vou. Th my help eue the pke n the vou gph een n th ppe n my hve gnfnt mpt on ll of the effeny met. Of oue, ue befly n Chpte, mny ophtte pth plnnng tehnque ext tht mnmze etn teon uh tvel tme whle ung vou metho uh pmet equton o ub polynoml. To exten th eeh, one oul ft pply ome of thee vne optmzton tehnque n then, ung ml ppoh to th ppe, etemne whh pth e mot effent n mult-te optmzton poblem.
64 REFERENCES ABB Robot AB. IRB M Pout Spefton. Atle 3HAC 9-, Rev. Sween: ABB Robot AB. ABB Robot AB. Opetng Mnul: Intouton to RAPID. Atle 3HAC93-. Sween: ABB Robot AB. Bobow, Jme E. Optml Robot Pth Plnnng Ung the Mnmum-Tme Cteon. IEEE Jounl of Robot n Automton. (988): 3-. Contntneu, D. n E.A. Coft. Smooth n Tme-Optml Tjetoy Plnnng fo Inutl Mnpulto long Spefe Pth. Jounl of Robot Sytem 7. (): 3-9. Cg, John J. Intouton to Robot: Mehn n Contol. 3 e. New Jeey: Peon Pente,. Dken, Hmz. Enegy Effent Snuol Pth Plnnng of Robot Mnpulto. Meh. Mh. Theoy 9. (99): Fel, Glen n Yuy Stepnenko. Itetve Dynm Pogmmng: An Appoh to Mnmum Enegy Tjetoy Plnnng fo Robot Mnpulto. Poeeng of the 99 IEEE Intentonl Confeene on Robot n Automton. Mnnepol, Hollebh, John M. Knemt n Dynm fo Contol. Robot Sene. E. Mhel By. Cmbge: MIT Pe, Mneu, Rh. Robot Moelng n Knemt. Boton: D Vn,.
65 7 Nguk, Mk L. Newton-Eule Dynm of Robot. Robot n Automton Hnbook. E. Thom R. Kufe. New Yok: CRC Pe,.... Vente, Dv Bo. Moelng n Blnng of Sphel Penulum ung Pllel Knemt Mnpulto. Mte The, Lun Inttute of Tehnology. Sweeen: 7.
66 8 Appenx A Tnfomton Mte T 3 T T T T T The followng e neee fo evng nvee knemt n Jobn equton: T T T ) ( ) ( 3 3 T T T ] [ ] [ 3 3 T T T
67 zw yw xw p p p T whee: ) ( ) ( ) ( ) ( ) ( p p p zw yw xw ) ( ] [ ) ( ) ( ] [ ) ( ) ( T T T 3 3 T T T T
68 Appenx B Invee Knemt Devton ), tn ( tn OR ), tn ( tn xw yw xw yw xw yw xw yw p p p p p p p p Ung the Lw of Cone: D p p p zw yw xw 3 ) n( ) o( o We oul olve fo θ 3 wth θ 3 = o - (D), howeve, to ount fo the elbow-up n elbow-own oluton: ), tn ( tn 3 D D D D Smlly, )) o( ), n( tn ( ) n( ) o(, tn 3 3 p p p yw xw zw ) ( ) ( ) ( p p p T T T T T zw yw xw
69 Equte (,3) n (3,3): ), ( tn ] [ ] [ ) ( p p p T T T T zw yw xw Equte (,3) n (3,3): ), tn( Equte (,) n (,): 3 3 ), tn( 3 3
: The ente of m n the moment of net e output n the oonte ytem of Fme: M = 3.3 gm Volume = 3. ub mllmete Sufe e = 73887.")
70 Appenx C Clulton of Inet Mte n Cente of M Veto Ung the M Popete funton of the 3D CAD oftwe SolWok, long wth CAD fle of the IRB vlble fo ownlo fom the ABB webte, the net C, teno mte I, fo eh lnk +, wee lulte wth epet to the ente of m of tht lnk. Lnk (hghlghte): The ente of m n the moment of net e output n the oonte ytem of Fme: M = 3.3 gm Volume = 3. ub mllmete Sufe e = mllmete^ Cente of m: ( mllmete ) X = 7.87 Y = 3. Z = Moment of net: ( gm * que mllmete ) Tken t the ente of m n lgne wth the output oonte ytem. Ixx = 39.7 Ixy = Ixz = 3.7 Iyx = Iyy = Iyz = 733. Izx = 3.7 Izy = 733. Izz = 7.
 Tken t the ente of m n lgne wth the output oonte ytem. Ixx = 9879. Ixy = -3897.77 Ixz = 37937. Iyx = -3897.77 Iyy = 383. Iyz = -8897.8 Izx = 37937. Izy = -8897.")
71 3 Lnk (hghlghte): The ente of m n the moment of net e output n the oonte ytem of Fme : M = 99.9 gm Volume = ub mllmete Sufe e = mllmete^ Cente of m: ( mllmete ) X = 98.9 Y = 9.73 Z = 9.3 Moment of net: ( gm * que mllmete ) Tken t the ente of m n lgne wth the output oonte ytem. Ixx = Ixy = Ixz = Iyx = Iyy = 383. Iyz = Izx = Izy = Izz =
 X = -. Y = -79.9 Z = -.8 Moment of net: ( gm * que mllmete ) Tken t the ente of m n lgne wth the output oonte ytem. Ixx = 9.9 Ixy = -83.7 Ixz = 9387.78 Iyx = -83.")
72 Lnk 3 (hghlghte, nlung emnng lnk to be ume pt of lnk 3): The ente of m n the moment of net e output n the oonte ytem of Fme 3: M = 8. gm Volume = ub mllmete Sufe e =. mllmete^ Cente of m: ( mllmete ) X = -. Y = Z = -.8 Moment of net: ( gm * que mllmete ) Tken t the ente of m n lgne wth the output oonte ytem. Ixx = 9.9 Ixy = Ixz = Iyx = Iyy = 77.9 Iyz = -3.9 Izx = Izy = -3.9 Izz = 7.3
73 Appenx D Jobn Mtx Devton (Ung nothe metho to vlte, Aumng lookng t only ft 3 jont) A A A L L L x J J J J J J J Clultng the J A : ˆ b J A ˆ b J A ˆ 3 3 b J A Clultng the veto (to be ue to lulte J L ),3,3,,3 ] [ ] [ p p p zw yw xw,3 ] [ ] [ p p p zw yw xw
74 Clultng the J L : ] [ ] [ ] [ ] [ ˆ,3 b J L,3 ] [ ] [ ] [ ] [ ˆ b J L Only oneng lne veloty (J L ) to elte jont te to en-effeto veloty: 3 3 ) ( ) ( J x 3 J L
75 7 Appenx E Smple RAPID Coe MODULE Moule CONST obtget Tget_:=[[.9987,.9993E-,79.],[ ,, ,],[,,,],[9E 9,9E9,9E9,9E9,9E9,9E9]]; CONST obtget Tget_:=[[,-,],[ E- 7,,,],[-,,-3,],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST obtget Tget_3:=[[,-,],[ E- 7,,,],[-,,-3,],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST obtget Tget_:=[[,-7,],[ E- 7,,,],[-,,-3,],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST obtget Tget_:=[[,-,],[ E- 7,,,],[-,,-3,],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST obtget Tget_:=[[,-,],[ E- 7,,,],[-,,-3,],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST obtget Tget_7:=[[9,-,],[ E- 7,,,],[-,,-3,],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST obtget Tget_8:=[[,-,],[ E- 7,,,],[-,,-3,],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST obtget Tget_9:=[[,,],[ E- 7,,,],[,,-3,],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST obtget Tget_:=[[,,],[ E- 7,,,],[,,-,],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST obtget Tget_:=[[9,,],[ E- 7,,,],[,,-,],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST obtget Tget_:=[[,,],[ E- 7,,,],[,,-,],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST obtget Tget_3:=[[,,],[ E- 7,,,],[,,-,],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST obtget Tget_:=[[,7,],[ E- 7,,,],[,,-,],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST obtget Tget_:=[[,,],[ E- 7,,,],[,,-,],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST obtget Tget_:=[[,,],[ E- 7,,,],[,,-,],[9E9,9E9,9E9,9E9,9E9,9E9]]; PROC Pth_() MoveL Tget_,v,fne,tool\WObj:=wobj; MoveL Tget_3,v,fne,tool\WObj:=wobj; MoveL Tget_,v,fne,tool\WObj:=wobj; MoveL Tget_,v,fne,tool\WObj:=wobj; MoveL Tget_,v,fne,tool\WObj:=wobj; MoveL Tget_7,v,fne,tool\WObj:=wobj; MoveL Tget_8,v,fne,tool\WObj:=wobj; MoveL Tget_9,v,fne,tool\WObj:=wobj;
76 8 MoveL Tget_,v,fne,tool\WObj:=wobj; MoveL Tget_,v,fne,tool\WObj:=wobj; MoveL Tget_,v,fne,tool\WObj:=wobj; MoveL Tget_3,v,fne,tool\WObj:=wobj; MoveL Tget_,v,fne,tool\WObj:=wobj; MoveL Tget_,v,fne,tool\WObj:=wobj; MoveL Tget_,v,fne,tool\WObj:=wobj; ENDPROC ENDMODULE
77 9 Appenx F Smple MATLAB Coe N = ; %Numbe of fnte tme ntevl tf=.; %Tme of movement n eon t = tf/n; %Tme of ntevl n eon %DH Pmete & Contnt lph_egee = [,9,,9,-9,9]; lph = lph_egee * p/8; =.7; %m =.3; =.3; =.38; m = 3.3; %kg m =.999; m3 =.8; g= 9.8; %m/^ P C = (/)*[7.87;3.;-89.3]; P C = (/)*[98.9;9.73;9.3]; P_3_C3 = (/)*[-.;-79.9;-.8]; P =(/)*[;;3]; P =(/)*[7;;]; P 3=(/)*[3;;]; %Inet mtx I = (/)*[39.7,333.88,3.7; ,788.9,733.; 3.7,-7.,383.8]; I = (/)*[9879., ,37937.; ,383., ; , ,773.88]; I3 = (/)*[9.9,-83.7, ; -83.7,77.9,-3.9; ,-3.9,7.3]; %y of jont ngle fom RobotStuo q(thet #, teton #) q(:3,)=[-3.;9-3.;-.8]* p/8; q(:3,)=[-.9;9-.;-8.7]* p/8; q(:3,3)=[-.7;9-7.38;-3.]* p/8; q(:3,)=[-.3;9-.;-.73]* p/8; q(:3,)=[-.7;9-.8;3.9]* p/8; q(:3,)=[;9-9.7;.8]* p/8; q(:3,7)=[.7;9-.8;3.9]* p/8; q(:3,8)=[.3;9-.;-.73]* p/8; q(:3,9)=[.7;9-7.38;-3.]* p/8;
78 7 q(:3,)=[.9;9-.;-8.7]* p/8; q(:3,)=[3.;9-3.;-.8]* p/8; %Iteton = tme fo =:(N+) f == qot(:3,)=[;;]; qotot(:3,)=[;;]; ele qot(:3,)= (q(:,) - q(:,-))/t; qotot(:3,)= (qot(:,) - qot(:,-))/t; en %Clulte toque ung tetve poe fo eh tme ntevl R =[o(q(,)), -n(q(,)), ;... n(q(,))*o(lph()),o(q(,))*o(lph()),... -n(lph());... n(q(,))*n(lph()),o(q(,))*n(lph()),... o(lph())]; R =R '; R = [o(q(,)), -n(q(,)), ;...,, -n(lph());... n(q(,))*n(lph()),o(q(,))*n(lph()), ]; R =R '; R 3= [o(q(3,)), -n(q(3,)), ;... n(q(3,))*o(lph(3)),o(q(3,))*o(lph(3)),... -n(lph(3));... n(q(3,))*n(lph(3)),o(q(3,))*n(lph(3)),... o(lph(3))]; R_3_=R 3'; thotz=[;;qot(,)]; thotz=[;;qot(,)]; thot3z=[;;qot(3,)]; thototz=[;;qotot(,)]; thototz=[;;qotot(,)]; thotot3z=[;;qotot(3,)]; w=[;;]; wot=[;;]; vot=[;;g]; vot); vot; %Outw Iteton %= w = R *w + thotz; wot = R *wot + o(r *w,thotz) + thototz; vot = R *(wot + P + o(w,o(w,p )) + votc = o(wot,p C)+ o(w,o(w,p C))+ F = m*votc;
79 7 N= I*wot + o(w,i*w); vot); vot; vot); vot3; %= w = R *w + thotz; wot = R *wot + o(r *w,thotz) + thototz; vot = R *(wot + P + o(w,o(w,p )) + votc = o(wot,p C)+ o(w,o(w,p C))+ F = m*votc; N= I*wot + o(w,i*w); %= w3 = R_3_*w + thot3z; wot3 = R_3_*wot + o(r_3_*w,thot3z) + thotot3z; vot3 = R_3_*(wot + P 3 + o(w,o(w,p 3)) + votc3 = o(wot3,p_3_c3)+ o(w3,o(w3,p_3_c3))+ F3 = m3*votc3; N3= I3*wot3 + o(w3,i3*w3); %Inw Iteton %=3 ff3 = F3; nn3 = N3 + o(p_3_c3, F3); to(3,) = nn3'*[;;]; %= ff = R 3*ff3 + F; nn = N + R 3*nn3 + o(p C, F)+ o(p 3, R 3*ff3); to(,) = nn'*[;;]; %= ff = R *ff + F; nn = N + R *nn + o(p C, F)+ o(p, R *ff); to(,) = nn'*[;;]; %Clulte powe fo eh jont fo eh tme ntevl W(,)=b(to(,)*qot(,)); W(,)=b(to(,)*qot(,)); W(3,)=b(to(3,)*qot(3,)); %Clulte totl powe fo eh tme ntevl Powe()=W(,)+W(,)+W(3,); %Clulte enegy onume f > RunSumEnegy() = RunSumEnegy(-) + Powe()*t; ele RunSumEnegy()= Powe()*t; en
80 7 en %Dply Conume Enegy RunSumEnegy(N+) %Dply vou gph fgue() x_plot=[:n+]; th=q(,:n+); th=q(,:n+); th3=q(3,:n+); plot(x_plot, th,'-', x_plot, th,'--', x_plot, th3,':'); legen('thet','thet','thet3') x([ N+ - ]) xlbel('iteton') ylbel('jont Angle (n)') ttle('jont Angle v Tme') fgue(3) x_plot=[:n+]; thot=qot(,:n+); thot=qot(,:n+); thot3=qot(3,:n+); plot(x_plot, thot,'-', x_plot, thot,'--', x_plot, thot3,':'); legen('thetdot','thetdot','thetdot3') x([ N+ - ]) xlbel('iteton') ylbel('jont Angle Veloty (n/e)') ttle('jont Angle Velote v Tme') fgue() x_plot=[:n+]; thotot=qotot(,:n+); thotot=qotot(,:n+); thotot3=qotot(3,:n+); plot(x_plot, thotot,'-', x_plot, thotot,'--', x_plot, thotot3,':'); legen('thetdotdot','thetdotdot','thetdotdot3') x([ N+ - ]) xlbel('iteton') ylbel('jont Angle Aeleton (n/e^)') ttle('jont Angle Aeleton v Tme') fgue() x_plot=[:n+]; T=to(,:N+); T=to(,:N+); T3=to(3,:N+); plot(x_plot, T,'-', x_plot, T,'--', x_plot, T3,':'); legen('jont ','Jont ','Jont 3') x([ N+ - ]) xlbel('iteton') ylbel('jont Toque (Nm)')
81 73 ttle('jont Toque v Tme') fgue() x_plot=[:n+]; Powe=W(,:N+); Powe=W(,:N+); Powe3=W(3,:N+); TotPowe=Powe(:N+); plot(x_plot, Powe,'-', x_plot, Powe,'--', x_plot, Powe3,':', x_plot, TotPowe,'-.'); legen('jont ','Jont ','Jont 3', 'All Jont') x([ N+ ]) xlbel('iteton') ylbel('powe (W)') ttle('powe v Tme') fgue(7) x_plot=[:n+]; Enegy=RunSumEnegy(:N+); plot(x_plot, Enegy); legen('cumultve Enegy') x([ N+ ]) xlbel('iteton') ylbel('enegy (J)') ttle('enegy Conumpton v Tme')
82 7 Appenx G MATLAB Reult
83 Tngul 7
84 7
85 Enegy onume: 7.9 J 77
86 Sque 78
87 79
88 Enegy onume:.83 J 8
89 Retngul 8
90 8
91 Enegy onume: 93.8 J 83
92 Sem-le 8
93 8
Introduction to Robotics (Fag 3480)
") Intouton to Robot (Fg 8) Vå Robet Woo (Hw Engneeeng n pple Sene-B) Ole Jkob Elle PhD (Mofe fo IFI/UIO) Føtemnuen II Inttutt fo Infomtkk Unvetetet Olo Sekjonlee Teknolog Intevenjonenteet Olo Unvetetkehu
Intouton to Robot (Fg 8) Vå Robet Woo (Hw Engneeeng n pple Sene-B) Ole Jkob Elle PhD (Mofe fo IFI/UIO) Føtemnuen II Inttutt fo Infomtkk Unvetetet Olo Sekjonlee Teknolog Intevenjonenteet Olo Unvetetkehu
Lecture 9-3/8/10-14 Spatial Description and Transformation
 Letue 9-8- tl Deton nd nfomton Homewo No. Due 9. Fme ngement onl. Do not lulte...8..7.8 Otonl et edt hot oof tht = - Homewo No. egned due 9 tud eton.-.. olve oblem:.....7.8. ee lde 6 7. e Mtlb on. f oble.
Letue 9-8- tl Deton nd nfomton Homewo No. Due 9. Fme ngement onl. Do not lulte...8..7.8 Otonl et edt hot oof tht = - Homewo No. egned due 9 tud eton.-.. olve oblem:.....7.8. ee lde 6 7. e Mtlb on. f oble.
Ch. 3: Forward and Inverse Kinematics
 Ch. : Fowa an Invee Knemat Reap: The Denavt-Hatenbeg (DH) Conventon Repeentng eah nvual homogeneou tanfomaton a the pout of fou ba tanfomaton: pout of fou ba tanfomaton: x a x z z a a a Rot Tan Tan Rot
Ch. : Fowa an Invee Knemat Reap: The Denavt-Hatenbeg (DH) Conventon Repeentng eah nvual homogeneou tanfomaton a the pout of fou ba tanfomaton: pout of fou ba tanfomaton: x a x z z a a a Rot Tan Tan Rot
Table of Information and Equation Tables for AP Physics Exams
 le of Infomton n Equton le fo P Phy Em he ompnyng le of Infomton n Equton le wll e pove to tuent when they tke the P Phy Em. heefoe, tuent my NO ng the own ope of thee tle to the em oom, lthough they my
le of Infomton n Equton le fo P Phy Em he ompnyng le of Infomton n Equton le wll e pove to tuent when they tke the P Phy Em. heefoe, tuent my NO ng the own ope of thee tle to the em oom, lthough they my
6.6 The Marquardt Algorithm
 6.6 The Mqudt Algothm lmttons of the gdent nd Tylo expnson methods ecstng the Tylo expnson n tems of ch-sque devtves ecstng the gdent sech nto n tetve mtx fomlsm Mqudt's lgothm utomtclly combnes the gdent
6.6 The Mqudt Algothm lmttons of the gdent nd Tylo expnson methods ecstng the Tylo expnson n tems of ch-sque devtves ecstng the gdent sech nto n tetve mtx fomlsm Mqudt's lgothm utomtclly combnes the gdent
Calculation Method of Dynamic Load Bearing Curve of Double-row Four-point Contact Ball Bearing
 Clulton Metho of Dynm Lo Beng Cuve of Doubleow Foupont Contt Bll Beng Shohun L College of Mehnl Engneeng Tnn Unvesty of Tehnology n Euton Tnn, Chn bstt On the bss of the stt nlyss of oubleow foupont ontt
Clulton Metho of Dynm Lo Beng Cuve of Doubleow Foupont Contt Bll Beng Shohun L College of Mehnl Engneeng Tnn Unvesty of Tehnology n Euton Tnn, Chn bstt On the bss of the stt nlyss of oubleow foupont ontt
8. Two Ion Interactions
 8. Two on ntetons The moels of mgnet oe hve een se on mltonns of the fom on J J zw. Wht s the physl ogn of ths two on ntetons 8. Dpol nteton The ogn of lge moleul fels nnot e the wek mgnet pol nteton CD
8. Two on ntetons The moels of mgnet oe hve een se on mltonns of the fom on J J zw. Wht s the physl ogn of ths two on ntetons 8. Dpol nteton The ogn of lge moleul fels nnot e the wek mgnet pol nteton CD
Empirical equations for electrical parameters of asymmetrical coupled microstrip lines
 Epl equons fo elel petes of syel ouple osp lnes I.M. Bsee Eletons eseh Instute El-h steet, Dokk, o, Egypt Abstt: Epl equons e eve fo the self n utul nutne n ptne fo two syel ouple osp lnes. he obne ptne
Epl equons fo elel petes of syel ouple osp lnes I.M. Bsee Eletons eseh Instute El-h steet, Dokk, o, Egypt Abstt: Epl equons e eve fo the self n utul nutne n ptne fo two syel ouple osp lnes. he obne ptne
E-Companion: Mathematical Proofs
 E-omnon: Mthemtcl Poo Poo o emm : Pt DS Sytem y denton o t ey to vey tht t ncee n wth d ncee n We dene } ] : [ { M whee / We let the ttegy et o ech etle n DS e ]} [ ] [ : { M w whee M lge otve nume oth
E-omnon: Mthemtcl Poo Poo o emm : Pt DS Sytem y denton o t ey to vey tht t ncee n wth d ncee n We dene } ] : [ { M whee / We let the ttegy et o ech etle n DS e ]} [ ] [ : { M w whee M lge otve nume oth
EE 410/510: Electromechanical Systems Chapter 3
 EE 4/5: Eleomehnl Syem hpe 3 hpe 3. Inoon o Powe Eleon Moelng n Applon of Op. Amp. Powe Amplfe Powe onvee Powe Amp n Anlog onolle Swhng onvee Boo onvee onvee Flyb n Fow onvee eonn n Swhng onvee 5// All
EE 4/5: Eleomehnl Syem hpe 3 hpe 3. Inoon o Powe Eleon Moelng n Applon of Op. Amp. Powe Amplfe Powe onvee Powe Amp n Anlog onolle Swhng onvee Boo onvee onvee Flyb n Fow onvee eonn n Swhng onvee 5// All
ME306 Dynamics, Spring HW1 Solution Key. AB, where θ is the angle between the vectors A and B, the proof
 ME6 Dnms, Spng HW Slutn Ke - Pve, gemetll.e. usng wngs sethes n nltll.e. usng equtns n nequltes, tht V then V. Nte: qunttes n l tpee e vets n n egul tpee e sls. Slutn: Let, Then V V V We wnt t pve tht:
ME6 Dnms, Spng HW Slutn Ke - Pve, gemetll.e. usng wngs sethes n nltll.e. usng equtns n nequltes, tht V then V. Nte: qunttes n l tpee e vets n n egul tpee e sls. Slutn: Let, Then V V V We wnt t pve tht:
5 - Determinants. r r. r r. r r. r s r = + det det det
 5 - Detemts Assote wth y sque mtx A thee s ume lle the etemt of A eote A o et A. Oe wy to efe the etemt, ths futo fom the set of ll mtes to the set of el umes, s y the followg thee popetes. All mtes elow
5 - Detemts Assote wth y sque mtx A thee s ume lle the etemt of A eote A o et A. Oe wy to efe the etemt, ths futo fom the set of ll mtes to the set of el umes, s y the followg thee popetes. All mtes elow
A Study on Root Properties of Super Hyperbolic GKM algebra
 Stuy on Root Popetes o Supe Hypebol GKM lgeb G.Uth n M.Pyn Deptment o Mthemts Phypp s College Chenn Tmlnu In. bstt: In ths ppe the Supe hypebol genelze K-Mooy lgebs o nente type s ene n the mly s lso elte.
Stuy on Root Popetes o Supe Hypebol GKM lgeb G.Uth n M.Pyn Deptment o Mthemts Phypp s College Chenn Tmlnu In. bstt: In ths ppe the Supe hypebol genelze K-Mooy lgebs o nente type s ene n the mly s lso elte.
NXO a Spatially High Order Finite Volume Numerical Method for Compressible Flows
 NXO Spty Hgh Ode Fnte Voume Nume Method fo Compebe Fow Jen-Me e Gouez One CFD Deptment Fouth HO CFD Wohop Heon June 4th B of the NXO heme Eue o Nve-Stoe fo pefet g w of tte dof pe e nd pe equton Voume
NXO Spty Hgh Ode Fnte Voume Nume Method fo Compebe Fow Jen-Me e Gouez One CFD Deptment Fouth HO CFD Wohop Heon June 4th B of the NXO heme Eue o Nve-Stoe fo pefet g w of tte dof pe e nd pe equton Voume
Rigid Body Dynamics. CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018
 Rg Bo Dnmcs CSE169: Compute Anmton nstucto: Steve Roteneg UCSD, Wnte 2018 Coss Pouct k j Popetes of the Coss Pouct Coss Pouct c c c 0 0 0 c Coss Pouct c c c c c c 0 0 0 0 0 0 Coss Pouct 0 0 0 ˆ ˆ 0 0 0
Rg Bo Dnmcs CSE169: Compute Anmton nstucto: Steve Roteneg UCSD, Wnte 2018 Coss Pouct k j Popetes of the Coss Pouct Coss Pouct c c c 0 0 0 c Coss Pouct c c c c c c 0 0 0 0 0 0 Coss Pouct 0 0 0 ˆ ˆ 0 0 0
Fuzzy Retrial Queues with Priority using DSW Algorithm
 ISSN e: Volume 6 Iue 9 Septeme 6 Intentonl Jounl of omputtonl Engneeng Reeh IJER Fuzzy Retl Queue wth Poty ung DSW lgothm S Shnmugunm Venkteh Deptment Of MthemtGovenment t ollege Slem-7 In Deptment Of
ISSN e: Volume 6 Iue 9 Septeme 6 Intentonl Jounl of omputtonl Engneeng Reeh IJER Fuzzy Retl Queue wth Poty ung DSW lgothm S Shnmugunm Venkteh Deptment Of MthemtGovenment t ollege Slem-7 In Deptment Of
Two-Input Fuzzy TPE Systems
 Two-Input Fuzzy TPE Sytem Joo P. Cvlho, Joe Tome, Dnel Chng-Yn IST - TU Lon, INESC-ID R. lve Redol, 9, 000-029 Lo, PORTUGL {oo.vlho, oe.tome}@ne-d.pt dnlyn@gml.om tt. Sngle nput Fuzzy TPE ytem, popoed
Two-Input Fuzzy TPE Sytem Joo P. Cvlho, Joe Tome, Dnel Chng-Yn IST - TU Lon, INESC-ID R. lve Redol, 9, 000-029 Lo, PORTUGL {oo.vlho, oe.tome}@ne-d.pt dnlyn@gml.om tt. Sngle nput Fuzzy TPE ytem, popoed
Dynamics of Linked Hierarchies. Constrained dynamics The Featherstone equations
 Dynm o Lnke Herrhe Contrne ynm The Fethertone equton Contrne ynm pply ore to one omponent, other omponent repotone, rom ner to r, to ty tne ontrnt F Contrne Boy Dynm Chpter 4 n: Mrth mpule-be Dynm Smulton
Dynm o Lnke Herrhe Contrne ynm The Fethertone equton Contrne ynm pply ore to one omponent, other omponent repotone, rom ner to r, to ty tne ontrnt F Contrne Boy Dynm Chpter 4 n: Mrth mpule-be Dynm Smulton
Uniform Circular Motion
 Unfom Ccul Moton Unfom ccul Moton An object mong t constnt sped n ccle The ntude of the eloct emns constnt The decton of the eloct chnges contnuousl!!!! Snce cceleton s te of chnge of eloct:!! Δ Δt The
Unfom Ccul Moton Unfom ccul Moton An object mong t constnt sped n ccle The ntude of the eloct emns constnt The decton of the eloct chnges contnuousl!!!! Snce cceleton s te of chnge of eloct:!! Δ Δt The
X-Ray Notes, Part III
 oll 6 X-y oe 3: Pe X-Ry oe, P III oe Deeo Coe oupu o x-y ye h look lke h: We efe ue of que lhly ffee efo h ue y ovk: Co: C ΔS S Sl o oe Ro: SR S Co o oe Ro: CR ΔS C SR Pevouly, we ee he SR fo ye hv pxel
oll 6 X-y oe 3: Pe X-Ry oe, P III oe Deeo Coe oupu o x-y ye h look lke h: We efe ue of que lhly ffee efo h ue y ovk: Co: C ΔS S Sl o oe Ro: SR S Co o oe Ro: CR ΔS C SR Pevouly, we ee he SR fo ye hv pxel
PARAMETERS INFLUENCE ON THE CONTROL OF A PMSM
 ISEF 007 - XIII Intentonl Symposum on Eletomgnet Fels n Mehtons, Eletl n Eleton Engneeng Pgue, Czeh Republ, Septembe 1-15, 007 PARAMETERS INFLUENCE ON THE CONTROL OF A PMSM M. P. Donsón Eletl Engneeng
ISEF 007 - XIII Intentonl Symposum on Eletomgnet Fels n Mehtons, Eletl n Eleton Engneeng Pgue, Czeh Republ, Septembe 1-15, 007 PARAMETERS INFLUENCE ON THE CONTROL OF A PMSM M. P. Donsón Eletl Engneeng
2. Elementary Linear Algebra Problems
 . Eleety e lge Pole. BS: B e lge Suoute (Pog pge wth PCK) Su of veto opoet:. Coputto y f- poe: () () () (3) N 3 4 5 3 6 4 7 8 Full y tee Depth te tep log()n Veto updte the f- poe wth N : ) ( ) ( ) ( )
. Eleety e lge Pole. BS: B e lge Suoute (Pog pge wth PCK) Su of veto opoet:. Coputto y f- poe: () () () (3) N 3 4 5 3 6 4 7 8 Full y tee Depth te tep log()n Veto updte the f- poe wth N : ) ( ) ( ) ( )
COMP 465: Data Mining More on PageRank
 COMP 465: Dt Mnng Moe on PgeRnk Sldes Adpted Fo: www.ds.og (Mnng Mssve Dtsets) Powe Iteton: Set = 1/ 1: = 2: = Goto 1 Exple: d 1/3 1/3 5/12 9/24 6/15 = 1/3 3/6 1/3 11/24 6/15 1/3 1/6 3/12 1/6 3/15 Iteton
COMP 465: Dt Mnng Moe on PgeRnk Sldes Adpted Fo: www.ds.og (Mnng Mssve Dtsets) Powe Iteton: Set = 1/ 1: = 2: = Goto 1 Exple: d 1/3 1/3 5/12 9/24 6/15 = 1/3 3/6 1/3 11/24 6/15 1/3 1/6 3/12 1/6 3/15 Iteton
AP Physics C: Mechanics
 08 AP Phyc C: Mechnc ee-repone Queton 08 The College Bod. College Bod, Advnced Plcement Pogm, AP, AP Centl, nd the con logo e egteed tdemk of the College Bod. Vt the College Bod on the Web: www.collegebod.og.
08 AP Phyc C: Mechnc ee-repone Queton 08 The College Bod. College Bod, Advnced Plcement Pogm, AP, AP Centl, nd the con logo e egteed tdemk of the College Bod. Vt the College Bod on the Web: www.collegebod.og.
The formulae in this booklet have been arranged according to the unit in which they are first
 Fomule Booklet Fomule Booklet The fomule ths ooklet hve ee ge og to the ut whh the e fst toue. Thus te sttg ut m e eque to use the fomule tht wee toue peeg ut e.g. tes sttg C mght e epete to use fomule
Fomule Booklet Fomule Booklet The fomule ths ooklet hve ee ge og to the ut whh the e fst toue. Thus te sttg ut m e eque to use the fomule tht wee toue peeg ut e.g. tes sttg C mght e epete to use fomule
Chapter I Vector Analysis
 . Chpte I Vecto nlss . Vecto lgeb j It s well-nown tht n vecto cn be wtten s Vectos obe the followng lgebc ules: scl s ) ( j v v cos ) ( e Commuttv ) ( ssoctve C C ) ( ) ( v j ) ( ) ( ) ( ) ( (v) he lw
. Chpte I Vecto nlss . Vecto lgeb j It s well-nown tht n vecto cn be wtten s Vectos obe the followng lgebc ules: scl s ) ( j v v cos ) ( e Commuttv ) ( ssoctve C C ) ( ) ( v j ) ( ) ( ) ( ) ( (v) he lw
The Area of a Triangle
 The e of Tingle tkhlid June 1, 015 1 Intodution In this tile we will e disussing the vious methods used fo detemining the e of tingle. Let [X] denote the e of X. Using se nd Height To stt off, the simplest
The e of Tingle tkhlid June 1, 015 1 Intodution In this tile we will e disussing the vious methods used fo detemining the e of tingle. Let [X] denote the e of X. Using se nd Height To stt off, the simplest
Lecture 5 Single factor design and analysis
 Lectue 5 Sngle fcto desgn nd nlss Completel ndomzed desgn (CRD Completel ndomzed desgn In the desgn of expements, completel ndomzed desgns e fo studng the effects of one pm fcto wthout the need to tke
Lectue 5 Sngle fcto desgn nd nlss Completel ndomzed desgn (CRD Completel ndomzed desgn In the desgn of expements, completel ndomzed desgns e fo studng the effects of one pm fcto wthout the need to tke
Performance evaluation and analysis of EV air-conditioning system
 Wol Elet Vele Jounl Vol. 4 - ISSN 2032-3 - 20 WEVA Pge00019 Abstt EVS2 Senzen, Cn, Nov -9, 20 Pefomne evluton n nlyss of EV -ontonng system Po-Hsu Ln GVD Dvson, Automotve Rese n estng Cente, Cngu County,
Wol Elet Vele Jounl Vol. 4 - ISSN 2032-3 - 20 WEVA Pge00019 Abstt EVS2 Senzen, Cn, Nov -9, 20 Pefomne evluton n nlyss of EV -ontonng system Po-Hsu Ln GVD Dvson, Automotve Rese n estng Cente, Cngu County,
Analysis of Variance and Design of Experiments-II
 Anly of Vrne Degn of Experment-II MODULE VI LECTURE - 8 SPLIT-PLOT AND STRIP-PLOT DESIGNS Dr Shlbh Deprtment of Mthemt & Sttt Indn Inttute of Tehnology Knpur Tretment ontrt: Mn effet The uefulne of hvng
Anly of Vrne Degn of Experment-II MODULE VI LECTURE - 8 SPLIT-PLOT AND STRIP-PLOT DESIGNS Dr Shlbh Deprtment of Mthemt & Sttt Indn Inttute of Tehnology Knpur Tretment ontrt: Mn effet The uefulne of hvng
Two kurtosis measures in a simulation study
 Two kuto meue n multon tudy Ann M Fo Deptment o Quntttve Method o Economc nd Bune Scence Unvety o Mlno-Bcocc nn.o@unmb.t CNAM, P COMPSTAT 00 Augut 3, 00 Ovevew The IF (SIF) nd t ole n kuto tude Fom nequlty
Two kuto meue n multon tudy Ann M Fo Deptment o Quntttve Method o Economc nd Bune Scence Unvety o Mlno-Bcocc nn.o@unmb.t CNAM, P COMPSTAT 00 Augut 3, 00 Ovevew The IF (SIF) nd t ole n kuto tude Fom nequlty
8. INVERSE Z-TRANSFORM
 8. INVERSE Z-TRANSFORM The proce by whch Z-trnform of tme ere, nmely X(), returned to the tme domn clled the nvere Z-trnform. The nvere Z-trnform defned by: Computer tudy Z X M-fle trn.m ued to fnd nvere
8. INVERSE Z-TRANSFORM The proce by whch Z-trnform of tme ere, nmely X(), returned to the tme domn clled the nvere Z-trnform. The nvere Z-trnform defned by: Computer tudy Z X M-fle trn.m ued to fnd nvere
This immediately suggests an inverse-square law for a "piece" of current along the line.
 Electomgnetic Theoy (EMT) Pof Rui, UNC Asheville, doctophys on YouTube Chpte T Notes The iot-svt Lw T nvese-sque Lw fo Mgnetism Compe the mgnitude of the electic field t distnce wy fom n infinite line
Electomgnetic Theoy (EMT) Pof Rui, UNC Asheville, doctophys on YouTube Chpte T Notes The iot-svt Lw T nvese-sque Lw fo Mgnetism Compe the mgnitude of the electic field t distnce wy fom n infinite line
Absolutely no collaboration allowed in any form
 Toy Fnl Exm poste toy, ue n one week Tke home, open notes exm Absolutely no collboton llowe n ny fom Instuctos wll not nswe ny uestons elte to exm solutons o soluton ppoches Questons fo clfcton shoul be
Toy Fnl Exm poste toy, ue n one week Tke home, open notes exm Absolutely no collboton llowe n ny fom Instuctos wll not nswe ny uestons elte to exm solutons o soluton ppoches Questons fo clfcton shoul be
On Fractional Operational Calculus pertaining to the product of H- functions
 nenonl eh ounl of Enneen n ehnolo RE e-ssn: 2395-56 Volume: 2 ue: 3 une-25 wwwene -SSN: 2395-72 On Fonl Oeonl Clulu enn o he ou of - funon D VBL Chu, C A 2 Demen of hem, Unve of Rhn, u-3255, n E-ml : vl@hooom
nenonl eh ounl of Enneen n ehnolo RE e-ssn: 2395-56 Volume: 2 ue: 3 une-25 wwwene -SSN: 2395-72 On Fonl Oeonl Clulu enn o he ou of - funon D VBL Chu, C A 2 Demen of hem, Unve of Rhn, u-3255, n E-ml : vl@hooom
Exam 2 Solutions. Jonathan Turner 4/2/2012. CS 542 Advanced Data Structures and Algorithms
 CS 542 Avn Dt Stutu n Alotm Exm 2 Soluton Jontn Tun 4/2/202. (5 ont) Con n oton on t tton t tutu n w t n t 2 no. Wt t mllt num o no tt t tton t tutu oul ontn. Exln you nw. Sn n mut n you o u t n t, t n
CS 542 Avn Dt Stutu n Alotm Exm 2 Soluton Jontn Tun 4/2/202. (5 ont) Con n oton on t tton t tutu n w t n t 2 no. Wt t mllt num o no tt t tton t tutu oul ontn. Exln you nw. Sn n mut n you o u t n t, t n
Chapter 7. Kleene s Theorem. 7.1 Kleene s Theorem. The following theorem is the most important and fundamental result in the theory of FA s:
 Chpte 7 Kleene s Theoem 7.1 Kleene s Theoem The following theoem is the most impotnt nd fundmentl esult in the theoy of FA s: Theoem 6 Any lnguge tht cn e defined y eithe egul expession, o finite utomt,
Chpte 7 Kleene s Theoem 7.1 Kleene s Theoem The following theoem is the most impotnt nd fundmentl esult in the theoy of FA s: Theoem 6 Any lnguge tht cn e defined y eithe egul expession, o finite utomt,
Convolutional Data Transmission System Using Real-Valued Self-Orthogonal Finite-Length Sequences
 Poeengs of the 5th WSEAS Intentonl Confeene on Sgnl Poessng Istnbul Tukey y 7-9 6 (pp73-78 Convolutonl Dt Tnssson Syste Usng Rel-Vlue Self-Othogonl Fnte-Length Sequenes Jong LE n Yoshho TANADA Gute Shool
Poeengs of the 5th WSEAS Intentonl Confeene on Sgnl Poessng Istnbul Tukey y 7-9 6 (pp73-78 Convolutonl Dt Tnssson Syste Usng Rel-Vlue Self-Othogonl Fnte-Length Sequenes Jong LE n Yoshho TANADA Gute Shool
Chapter Linear Regression
 Chpte 6.3 Le Regesso Afte edg ths chpte, ou should be ble to. defe egesso,. use sevel mmzg of esdul cte to choose the ght cteo, 3. deve the costts of le egesso model bsed o lest sques method cteo,. use
Chpte 6.3 Le Regesso Afte edg ths chpte, ou should be ble to. defe egesso,. use sevel mmzg of esdul cte to choose the ght cteo, 3. deve the costts of le egesso model bsed o lest sques method cteo,. use
Illustrating the space-time coordinates of the events associated with the apparent and the actual position of a light source
 Illustting the spe-time oointes of the events ssoite with the ppent n the tul position of light soue Benh Rothenstein ), Stefn Popesu ) n Geoge J. Spi 3) ) Politehni Univesity of Timiso, Physis Deptment,
Illustting the spe-time oointes of the events ssoite with the ppent n the tul position of light soue Benh Rothenstein ), Stefn Popesu ) n Geoge J. Spi 3) ) Politehni Univesity of Timiso, Physis Deptment,
ˆ 2. Chapter 4 The structure of diatomic molecules. 1 Treatment of variation method for the H 2+ ion 1. Shroedinger equation of H 2. e - r b.
 Chpte 4 The stutue of tom moleules Tetment of vton metho fo the on. hoenge equton of Bon-Oppenheme Appoxmton The eletons e muh lghte thn the nule. Nule moton s slow eltve to the eleton moton. A θ e - R
Chpte 4 The stutue of tom moleules Tetment of vton metho fo the on. hoenge equton of Bon-Oppenheme Appoxmton The eletons e muh lghte thn the nule. Nule moton s slow eltve to the eleton moton. A θ e - R
IO Gender and natural history
 LNA HEBNGER Gede d tul hty The tylu f the fele [plt] the v hle the vulv d the Veu epd t the t Thu the uteu v d vulv ke up the ptl the e tht de btt ve t ll the fele pt f plt A f e e e eed quk lk euh f Ppu
LNA HEBNGER Gede d tul hty The tylu f the fele [plt] the v hle the vulv d the Veu epd t the t Thu the uteu v d vulv ke up the ptl the e tht de btt ve t ll the fele pt f plt A f e e e eed quk lk euh f Ppu
Satellite Orbits. Orbital Mechanics. Circular Satellite Orbits
 Obitl Mechnic tellite Obit Let u tt by king the quetion, Wht keep tellite in n obit ound eth?. Why doen t tellite go diectly towd th, nd why doen t it ecpe th? The nwe i tht thee e two min foce tht ct
Obitl Mechnic tellite Obit Let u tt by king the quetion, Wht keep tellite in n obit ound eth?. Why doen t tellite go diectly towd th, nd why doen t it ecpe th? The nwe i tht thee e two min foce tht ct
Stability analysis of delayed system using Bode Integral
 Stblty nlyss of elye system usng Boe Integl Ansh Ahy, Debt Mt. Detment of Instumentton n Eletons Engneeng, Jvu Unvesty, Slt-Lke Cmus, LB-8, Seto 3, Kolkt-798, In.. Detment of Eletons n ommunton Engneeng,
Stblty nlyss of elye system usng Boe Integl Ansh Ahy, Debt Mt. Detment of Instumentton n Eletons Engneeng, Jvu Unvesty, Slt-Lke Cmus, LB-8, Seto 3, Kolkt-798, In.. Detment of Eletons n ommunton Engneeng,
CHAPTER 7 Applications of Integration
 CHAPTER 7 Applitions of Integtion Setion 7. Ae of Region Between Two Cuves.......... Setion 7. Volume: The Disk Method................. Setion 7. Volume: The Shell Method................ Setion 7. A Length
CHAPTER 7 Applitions of Integtion Setion 7. Ae of Region Between Two Cuves.......... Setion 7. Volume: The Disk Method................. Setion 7. Volume: The Shell Method................ Setion 7. A Length
Concept of Activity. Concept of Activity. Thermodynamic Equilibrium Constants [ C] [ D] [ A] [ B]
![Concept of Activity. Concept of Activity. Thermodynamic Equilibrium Constants [ C] [ D] [ A] [ B]](/thumbs/80/81967334.jpg "Concept of Activity. Concept of Activity. Thermodynamic Equilibrium Constants [ C] [ D] [ A] [ B]") Conept of Atvty Equlbrum onstnt s thermodynm property of n equlbrum system. For heml reton t equlbrum; Conept of Atvty Thermodynm Equlbrum Constnts A + bb = C + dd d [C] [D] [A] [B] b Conentrton equlbrum
Conept of Atvty Equlbrum onstnt s thermodynm property of n equlbrum system. For heml reton t equlbrum; Conept of Atvty Thermodynm Equlbrum Constnts A + bb = C + dd d [C] [D] [A] [B] b Conentrton equlbrum
African Journal of Science and Technology (AJST) Science and Engineering Series Vol. 4, No. 2, pp GENERALISED DELETION DESIGNS
 Science and Engineering Series Vol. 4, No. 2, pp GENERALISED DELETION DESIGNS") Af Joul of See Tehology (AJST) See Egeeg See Vol. 4, No.,. 7-79 GENERALISED DELETION DESIGNS Mhel Ku Gh Joh Wylff Ohbo Dee of Mhe, Uvey of Nob, P. O. Bo 3097, Nob, Key ABSTRACT:- I h e yel gle ele fol
Af Joul of See Tehology (AJST) See Egeeg See Vol. 4, No.,. 7-79 GENERALISED DELETION DESIGNS Mhel Ku Gh Joh Wylff Ohbo Dee of Mhe, Uvey of Nob, P. O. Bo 3097, Nob, Key ABSTRACT:- I h e yel gle ele fol
Physics 11b Lecture #11
 Physics 11b Lectue #11 Mgnetic Fields Souces of the Mgnetic Field S&J Chpte 9, 3 Wht We Did Lst Time Mgnetic fields e simil to electic fields Only diffeence: no single mgnetic pole Loentz foce Moving chge
Physics 11b Lectue #11 Mgnetic Fields Souces of the Mgnetic Field S&J Chpte 9, 3 Wht We Did Lst Time Mgnetic fields e simil to electic fields Only diffeence: no single mgnetic pole Loentz foce Moving chge
Abhilasha Classes Class- XII Date: SOLUTION (Chap - 9,10,12) MM 50 Mob no
 MM 50 Mob no") hlsh Clsses Clss- XII Dte: 0- - SOLUTION Chp - 9,0, MM 50 Mo no-996 If nd re poston vets of nd B respetvel, fnd the poston vet of pont C n B produed suh tht C B vet r C B = where = hs length nd dreton
hlsh Clsses Clss- XII Dte: 0- - SOLUTION Chp - 9,0, MM 50 Mo no-996 If nd re poston vets of nd B respetvel, fnd the poston vet of pont C n B produed suh tht C B vet r C B = where = hs length nd dreton
Table of Information and Equation Tables for AP Physics 1 and 2 Exams
 Tle of Infoton nd Equton Tle fo P Py nd E Te opnyng Tle of Infoton nd equton tle wll e povded to tudent wen tey tke te P Py nd E. Teefoe, tudent y NOT ng te own ope of tee tle to te e oo, ltoug tey y ue
Tle of Infoton nd Equton Tle fo P Py nd E Te opnyng Tle of Infoton nd equton tle wll e povded to tudent wen tey tke te P Py nd E. Teefoe, tudent y NOT ng te own ope of tee tle to te e oo, ltoug tey y ue
Class Summary. be functions and f( D) , we define the composition of f with g, denoted g f by
 , we define the composition of f with g, denoted g f by") Clss Summy.5 Eponentil Functions.6 Invese Functions nd Logithms A function f is ule tht ssigns to ech element D ectly one element, clled f( ), in. Fo emple : function not function Given functions f, g:
Clss Summy.5 Eponentil Functions.6 Invese Functions nd Logithms A function f is ule tht ssigns to ech element D ectly one element, clled f( ), in. Fo emple : function not function Given functions f, g:
MATHEMATICS II PUC VECTOR ALGEBRA QUESTIONS & ANSWER
 MATHEMATICS II PUC VECTOR ALGEBRA QUESTIONS & ANSWER I One M Queston Fnd the unt veto n the deton of Let ˆ ˆ 9 Let & If Ae the vetos & equl? But vetos e not equl sne the oespondng omponents e dstnt e detons
MATHEMATICS II PUC VECTOR ALGEBRA QUESTIONS & ANSWER I One M Queston Fnd the unt veto n the deton of Let ˆ ˆ 9 Let & If Ae the vetos & equl? But vetos e not equl sne the oespondng omponents e dstnt e detons
Position and Speed Control. Industrial Electrical Engineering and Automation Lund University, Sweden
 Poton nd Speed Control Lund Unverty, Seden Generc Structure R poer Reference Sh tte Voltge Current Control ytem M Speed Poton Ccde Control * θ Poton * Speed * control control - - he ytem contn to ntegrton.
Poton nd Speed Control Lund Unverty, Seden Generc Structure R poer Reference Sh tte Voltge Current Control ytem M Speed Poton Ccde Control * θ Poton * Speed * control control - - he ytem contn to ntegrton.
Week 8. Topic 2 Properties of Logarithms
 Week 8 Topic 2 Popeties of Logithms 1 Week 8 Topic 2 Popeties of Logithms Intoduction Since the esult of ithm is n eponent, we hve mny popeties of ithms tht e elted to the popeties of eponents. They e
Week 8 Topic 2 Popeties of Logithms 1 Week 8 Topic 2 Popeties of Logithms Intoduction Since the esult of ithm is n eponent, we hve mny popeties of ithms tht e elted to the popeties of eponents. They e
Homework 3 MAE 118C Problems 2, 5, 7, 10, 14, 15, 18, 23, 30, 31 from Chapter 5, Lamarsh & Baratta. The flux for a point source is:
 . Homewok 3 MAE 8C Poblems, 5, 7, 0, 4, 5, 8, 3, 30, 3 fom Chpte 5, msh & Btt Point souces emit nuetons/sec t points,,, n 3 fin the flux cuent hlf wy between one sie of the tingle (blck ot). The flux fo
. Homewok 3 MAE 8C Poblems, 5, 7, 0, 4, 5, 8, 3, 30, 3 fom Chpte 5, msh & Btt Point souces emit nuetons/sec t points,,, n 3 fin the flux cuent hlf wy between one sie of the tingle (blck ot). The flux fo
Matrix Methods in Kinematics
 Mtr Metho n Knemt Fe Mong Frme ' ' Fe n Rottng ' ' ' ' ' ' o n o n n o n o T Fe o n n o R Fe Mtr Metho n Knemt. Rotte bout Z (α o n n o o n n o Rotton mtr Comonent n the fe tem - Referene Mtr Metho n Knemt
Mtr Metho n Knemt Fe Mong Frme ' ' Fe n Rottng ' ' ' ' ' ' o n o n n o n o T Fe o n n o R Fe Mtr Metho n Knemt. Rotte bout Z (α o n n o o n n o Rotton mtr Comonent n the fe tem - Referene Mtr Metho n Knemt
AN ALGEBRAIC APPROACH TO M-BAND WAVELETS CONSTRUCTION
 AN ALGEBRAIC APPROACH TO -BAN WAELETS CONSTRUCTION Toy L Qy S Pewe Ho Ntol Lotoy o e Peeto Pe Uety Be 8 P. R. C Att T e eet le o to ott - otool welet e. A yte of ott eto ote fo - otool flte te olto e o
AN ALGEBRAIC APPROACH TO -BAN WAELETS CONSTRUCTION Toy L Qy S Pewe Ho Ntol Lotoy o e Peeto Pe Uety Be 8 P. R. C Att T e eet le o to ott - otool welet e. A yte of ott eto ote fo - otool flte te olto e o
Prerna Tower, Road No 2, Contractors Area, Bistupur, Jamshedpur , Tel (0657) ,
 ,") R Pen Towe Rod No Conttos Ae Bistupu Jmshedpu 8 Tel (67)89 www.penlsses.om IIT JEE themtis Ppe II PART III ATHEATICS SECTION I (Totl ks : ) (Single Coet Answe Type) This setion ontins 8 multiple hoie questions.
R Pen Towe Rod No Conttos Ae Bistupu Jmshedpu 8 Tel (67)89 www.penlsses.om IIT JEE themtis Ppe II PART III ATHEATICS SECTION I (Totl ks : ) (Single Coet Answe Type) This setion ontins 8 multiple hoie questions.
Properties and Formulas
 Popeties nd Fomuls Cpte 1 Ode of Opetions 1. Pefom ny opetion(s) inside gouping symols. 2. Simplify powes. 3. Multiply nd divide in ode fom left to igt. 4. Add nd sutt in ode fom left to igt. Identity
Popeties nd Fomuls Cpte 1 Ode of Opetions 1. Pefom ny opetion(s) inside gouping symols. 2. Simplify powes. 3. Multiply nd divide in ode fom left to igt. 4. Add nd sutt in ode fom left to igt. Identity
General Physics II. number of field lines/area. for whole surface: for continuous surface is a whole surface
 Genel Physics II Chpte 3: Guss w We now wnt to quickly discuss one of the moe useful tools fo clculting the electic field, nmely Guss lw. In ode to undestnd Guss s lw, it seems we need to know the concept
Genel Physics II Chpte 3: Guss w We now wnt to quickly discuss one of the moe useful tools fo clculting the electic field, nmely Guss lw. In ode to undestnd Guss s lw, it seems we need to know the concept
defined on a domain can be expanded into the Taylor series around a point a except a singular point. Also, f( z)
") 08 Tylo eie nd Mcluin eie A holomophic function f( z) defined on domin cn be expnded into the Tylo eie ound point except ingul point. Alo, f( z) cn be expnded into the Mcluin eie in the open dik with diu
08 Tylo eie nd Mcluin eie A holomophic function f( z) defined on domin cn be expnded into the Tylo eie ound point except ingul point. Alo, f( z) cn be expnded into the Mcluin eie in the open dik with diu
10 Statistical Distributions Solutions
 Communictions Engineeing MSc - Peliminy Reding 1 Sttisticl Distiutions Solutions 1) Pove tht the vince of unifom distiution with minimum vlue nd mximum vlue ( is ) 1. The vince is the men of the sques
Communictions Engineeing MSc - Peliminy Reding 1 Sttisticl Distiutions Solutions 1) Pove tht the vince of unifom distiution with minimum vlue nd mximum vlue ( is ) 1. The vince is the men of the sques
10.3 The Quadratic Formula
 . Te Qudti Fomul We mentioned in te lst setion tt ompleting te sque n e used to solve ny qudti eqution. So we n use it to solve 0. We poeed s follows 0 0 Te lst line of tis we ll te qudti fomul. Te Qudti
. Te Qudti Fomul We mentioned in te lst setion tt ompleting te sque n e used to solve ny qudti eqution. So we n use it to solve 0. We poeed s follows 0 0 Te lst line of tis we ll te qudti fomul. Te Qudti
Trigonometry. Trigonometry. Solutions. Curriculum Ready ACMMG: 223, 224, 245.
 Trgonometry Trgonometry Solutons Currulum Redy CMMG:, 4, 4 www.mthlets.om Trgonometry Solutons Bss Pge questons. Identfy f the followng trngles re rght ngled or not. Trngles,, d, e re rght ngled ndted
Trgonometry Trgonometry Solutons Currulum Redy CMMG:, 4, 4 www.mthlets.om Trgonometry Solutons Bss Pge questons. Identfy f the followng trngles re rght ngled or not. Trngles,, d, e re rght ngled ndted
Lectures # He-like systems. October 31 November 4,6
 Lectue #5-7 7 Octoe 3 oveme 4,6 Self-conitent field Htee-Foc eqution: He-lie ytem Htee-Foc eqution: cloed-hell hell ytem Chpte 3, pge 6-77, Lectue on Atomic Phyic He-lie ytem H (, h ( + h ( + h ( Z Z:
Lectue #5-7 7 Octoe 3 oveme 4,6 Self-conitent field Htee-Foc eqution: He-lie ytem Htee-Foc eqution: cloed-hell hell ytem Chpte 3, pge 6-77, Lectue on Atomic Phyic He-lie ytem H (, h ( + h ( + h ( Z Z:
Math 4318 : Real Analysis II Mid-Term Exam 1 14 February 2013
 Mth 4318 : Rel Anlysis II Mid-Tem Exm 1 14 Febuy 2013 Nme: Definitions: Tue/Flse: Poofs: 1. 2. 3. 4. 5. 6. Totl: Definitions nd Sttements of Theoems 1. (2 points) Fo function f(x) defined on (, b) nd fo
Mth 4318 : Rel Anlysis II Mid-Tem Exm 1 14 Febuy 2013 Nme: Definitions: Tue/Flse: Poofs: 1. 2. 3. 4. 5. 6. Totl: Definitions nd Sttements of Theoems 1. (2 points) Fo function f(x) defined on (, b) nd fo
Kinematics Quantities. Linear Motion. Coordinate System. Kinematics Quantities. Velocity. Position. Don t Forget Units!
 Knemtc Quntte Lner Phyc 11 Eyre Tme Intnt t Fundmentl Tme Interl t Dened Poton Fundmentl Dplcement Dened Aerge g Dened Aerge Accelerton g Dened Knemtc Quntte Scler: Mgntude Tme Intnt, Tme Interl nd Speed
Knemtc Quntte Lner Phyc 11 Eyre Tme Intnt t Fundmentl Tme Interl t Dened Poton Fundmentl Dplcement Dened Aerge g Dened Aerge Accelerton g Dened Knemtc Quntte Scler: Mgntude Tme Intnt, Tme Interl nd Speed
Trigonometry. Trigonometry. Curriculum Ready ACMMG: 223, 224, 245.
 Trgonometry Trgonometry Currulum Rey ACMMG: 223, 22, 2 www.mthlets.om Trgonometry TRIGONOMETRY Bslly, mny stutons n the rel worl n e relte to rght ngle trngle. Trgonometry souns ffult, ut t s relly just
Trgonometry Trgonometry Currulum Rey ACMMG: 223, 22, 2 www.mthlets.om Trgonometry TRIGONOMETRY Bslly, mny stutons n the rel worl n e relte to rght ngle trngle. Trgonometry souns ffult, ut t s relly just
ANOTHER INTEGER NUMBER ALGORITHM TO SOLVE LINEAR EQUATIONS (USING CONGRUENCY)
") ANOTHER INTEGER NUMBER ALGORITHM TO SOLVE LINEAR EQUATIONS (USING CONGRUENCY) Floet Smdche, Ph D Aocte Pofeo Ch of Deptmet of Mth & Scece Uvety of New Mexco 2 College Rod Gllup, NM 873, USA E-ml: md@um.edu
ANOTHER INTEGER NUMBER ALGORITHM TO SOLVE LINEAR EQUATIONS (USING CONGRUENCY) Floet Smdche, Ph D Aocte Pofeo Ch of Deptmet of Mth & Scece Uvety of New Mexco 2 College Rod Gllup, NM 873, USA E-ml: md@um.edu
Electric Potential. and Equipotentials
 Electic Potentil nd Euipotentils U Electicl Potentil Review: W wok done y foce in going fom to long pth. l d E dl F W dl F θ Δ l d E W U U U Δ Δ l d E W U U U U potentil enegy electic potentil Potentil
Electic Potentil nd Euipotentils U Electicl Potentil Review: W wok done y foce in going fom to long pth. l d E dl F W dl F θ Δ l d E W U U U Δ Δ l d E W U U U U potentil enegy electic potentil Potentil
v v at 1 2 d vit at v v 2a d
 SPH3UW Unt. Accelerton n One Denon Pge o 9 Note Phyc Inventory Accelerton the rte o chnge o velocty. Averge ccelerton, ve the chnge n velocty dvded by the te ntervl, v v v ve. t t v dv Intntneou ccelerton
SPH3UW Unt. Accelerton n One Denon Pge o 9 Note Phyc Inventory Accelerton the rte o chnge o velocty. Averge ccelerton, ve the chnge n velocty dvded by the te ntervl, v v v ve. t t v dv Intntneou ccelerton
Lunar Lander Landing Site Decision in Low-Fuel Case
 MATEC Web of Confeenes 54 93 (6) DOI:.5/ mteonf/65493 MIMT 6 Lun Lnde Lndng Ste Deson n Low-Fuel Cse Mn-Guk Seo Seong-Mn Hong nd Mn-Je Thk KAIST Deptment of Aeospe Engneeng Dejeon Koe Abstt. Ths ppe dels
MATEC Web of Confeenes 54 93 (6) DOI:.5/ mteonf/65493 MIMT 6 Lun Lnde Lndng Ste Deson n Low-Fuel Cse Mn-Guk Seo Seong-Mn Hong nd Mn-Je Thk KAIST Deptment of Aeospe Engneeng Dejeon Koe Abstt. Ths ppe dels
Detection and Estimation Theory
 ESE 54 Detecton and Etmaton Theoy Joeph A. O Sullvan Samuel C. Sach Pofeo Electonc Sytem and Sgnal Reeach Laboatoy Electcal and Sytem Engneeng Wahngton Unvety 411 Jolley Hall 314-935-4173 (Lnda anwe) jao@wutl.edu
ESE 54 Detecton and Etmaton Theoy Joeph A. O Sullvan Samuel C. Sach Pofeo Electonc Sytem and Sgnal Reeach Laboatoy Electcal and Sytem Engneeng Wahngton Unvety 411 Jolley Hall 314-935-4173 (Lnda anwe) jao@wutl.edu
2 dependence in the electrostatic force means that it is also
 lectc Potental negy an lectc Potental A scala el, nvolvng magntues only, s oten ease to wo wth when compae to a vecto el. Fo electc els not havng to begn wth vecto ssues woul be nce. To aange ths a scala
lectc Potental negy an lectc Potental A scala el, nvolvng magntues only, s oten ease to wo wth when compae to a vecto el. Fo electc els not havng to begn wth vecto ssues woul be nce. To aange ths a scala
Answers to test yourself questions
 Answes to test youself questions opic Descibing fields Gm Gm Gm Gm he net field t is: g ( d / ) ( 4d / ) d d Gm Gm Gm Gm Gm Gm b he net potentil t is: V d / 4d / d 4d d d V e 4 7 9 49 J kg 7 7 Gm d b E
Answes to test youself questions opic Descibing fields Gm Gm Gm Gm he net field t is: g ( d / ) ( 4d / ) d d Gm Gm Gm Gm Gm Gm b he net potentil t is: V d / 4d / d 4d d d V e 4 7 9 49 J kg 7 7 Gm d b E
The Shape of the Pair Distribution Function.
 The Shpe of the P Dstbuton Functon. Vlentn Levshov nd.f. Thope Deptment of Phscs & stonom nd Cente fo Fundmentl tels Resech chgn Stte Unvest Sgnfcnt pogess n hgh-esoluton dffcton epements on powde smples
The Shpe of the P Dstbuton Functon. Vlentn Levshov nd.f. Thope Deptment of Phscs & stonom nd Cente fo Fundmentl tels Resech chgn Stte Unvest Sgnfcnt pogess n hgh-esoluton dffcton epements on powde smples
Topics for Review for Final Exam in Calculus 16A
 Topics fo Review fo Finl Em in Clculus 16A Instucto: Zvezdelin Stnkov Contents 1. Definitions 1. Theoems nd Poblem Solving Techniques 1 3. Eecises to Review 5 4. Chet Sheet 5 1. Definitions Undestnd the
Topics fo Review fo Finl Em in Clculus 16A Instucto: Zvezdelin Stnkov Contents 1. Definitions 1. Theoems nd Poblem Solving Techniques 1 3. Eecises to Review 5 4. Chet Sheet 5 1. Definitions Undestnd the
x=0 x=0 Positive Negative Positions Positions x=0 Positive Negative Positions Positions
 Knemtc Quntte Lner Moton Phyc 101 Eyre Tme Intnt t Fundmentl Tme Interl Defned Poton x Fundmentl Dplcement Defned Aerge Velocty g Defned Aerge Accelerton g Defned Knemtc Quntte Scler: Mgntude Tme Intnt,
Knemtc Quntte Lner Moton Phyc 101 Eyre Tme Intnt t Fundmentl Tme Interl Defned Poton x Fundmentl Dplcement Defned Aerge Velocty g Defned Aerge Accelerton g Defned Knemtc Quntte Scler: Mgntude Tme Intnt,
PHYS 2421 Fields and Waves
 PHYS 242 Felds nd Wves Instucto: Joge A. López Offce: PSCI 29 A, Phone: 747-7528 Textook: Unvesty Physcs e, Young nd Feedmn 23. Electc potentl enegy 23.2 Electc potentl 23.3 Clcultng electc potentl 23.4
PHYS 242 Felds nd Wves Instucto: Joge A. López Offce: PSCI 29 A, Phone: 747-7528 Textook: Unvesty Physcs e, Young nd Feedmn 23. Electc potentl enegy 23.2 Electc potentl 23.3 Clcultng electc potentl 23.4
(a) Counter-Clockwise (b) Clockwise ()N (c) No rotation (d) Not enough information
 Counter-Clockwise (b) Clockwise ()N (c) No rotation (d) Not enough information") m m m00 kg dult, m0 kg bby. he seesw stts fom est. Which diection will it ottes? ( Counte-Clockwise (b Clockwise ( (c o ottion ti (d ot enough infomtion Effect of Constnt et oque.3 A constnt non-zeo toque
m m m00 kg dult, m0 kg bby. he seesw stts fom est. Which diection will it ottes? ( Counte-Clockwise (b Clockwise ( (c o ottion ti (d ot enough infomtion Effect of Constnt et oque.3 A constnt non-zeo toque
Mark Scheme (Results) January 2008
 January 2008") Mk Scheme (Results) Jnuy 00 GCE GCE Mthemtics (6679/0) Edecel Limited. Registeed in Englnd nd Wles No. 4496750 Registeed Office: One90 High Holbon, London WCV 7BH Jnuy 00 6679 Mechnics M Mk Scheme Question
Mk Scheme (Results) Jnuy 00 GCE GCE Mthemtics (6679/0) Edecel Limited. Registeed in Englnd nd Wles No. 4496750 Registeed Office: One90 High Holbon, London WCV 7BH Jnuy 00 6679 Mechnics M Mk Scheme Question
EECE 260 Electrical Circuits Prof. Mark Fowler
 EECE 60 Electicl Cicuits Pof. Mk Fowle Complex Numbe Review /6 Complex Numbes Complex numbes ise s oots of polynomils. Definition of imginy # nd some esulting popeties: ( ( )( ) )( ) Recll tht the solution
EECE 60 Electicl Cicuits Pof. Mk Fowle Complex Numbe Review /6 Complex Numbes Complex numbes ise s oots of polynomils. Definition of imginy # nd some esulting popeties: ( ( )( ) )( ) Recll tht the solution
Previously. Extensions to backstepping controller designs. Tracking using backstepping Suppose we consider the general system
 436-459 Advnced contol nd utomtion Extensions to bckstepping contolle designs Tcking Obseves (nonline dmping) Peviously Lst lectue we looked t designing nonline contolles using the bckstepping technique
436-459 Advnced contol nd utomtion Extensions to bckstepping contolle designs Tcking Obseves (nonline dmping) Peviously Lst lectue we looked t designing nonline contolles using the bckstepping technique
10 m, so the distance from the Sun to the Moon during a solar eclipse is. The mass of the Sun, Earth, and Moon are = =
 Chpte 1 nivesl Gvittion 11 *P1. () The un-th distnce is 1.4 nd the th-moon 8 distnce is.84, so the distnce fom the un to the Moon duing sol eclipse is 11 8 11 1.4.84 = 1.4 The mss of the un, th, nd Moon
Chpte 1 nivesl Gvittion 11 *P1. () The un-th distnce is 1.4 nd the th-moon 8 distnce is.84, so the distnce fom the un to the Moon duing sol eclipse is 11 8 11 1.4.84 = 1.4 The mss of the un, th, nd Moon
ECONOMETRIC ANALYSIS ON EFFICIENCY OF ESTIMATOR ABSTRACT
 ECOOMETRIC LYSIS O EFFICIECY OF ESTIMTOR M. Khohev, Lectue, Gffth Uvet, School of ccoutg d Fce, utl F. K, tt Pofeo, Mchuett Ittute of Techolog, Deptet of Mechcl Egeeg, US; cuetl t Shf Uvet, I. Houl P.
ECOOMETRIC LYSIS O EFFICIECY OF ESTIMTOR M. Khohev, Lectue, Gffth Uvet, School of ccoutg d Fce, utl F. K, tt Pofeo, Mchuett Ittute of Techolog, Deptet of Mechcl Egeeg, US; cuetl t Shf Uvet, I. Houl P.
( ) D x ( s) if r s (3) ( ) (6) ( r) = d dr D x
 D x ( s) if r s (3) ( ) (6) ( r) = d dr D x") SIO 22B, Rudnick dpted fom Dvis III. Single vile sttistics The next few lectues e intended s eview of fundmentl sttistics. The gol is to hve us ll speking the sme lnguge s we move to moe dvnced topics.
SIO 22B, Rudnick dpted fom Dvis III. Single vile sttistics The next few lectues e intended s eview of fundmentl sttistics. The gol is to hve us ll speking the sme lnguge s we move to moe dvnced topics.
IMA Preprint Series # 2202
 FRIENDY EQUIIBRIUM INTS IN EXTENSIVE GMES WITH CMETE INFRMTIN By Ezo Mch IM epnt Sees # My 8 INSTITUTE FR MTHEMTICS ND ITS ICTINS UNIVERSITY F MINNEST nd Hll 7 Chuch Steet S.E. Mnnepols Mnnesot 5555 6
FRIENDY EQUIIBRIUM INTS IN EXTENSIVE GMES WITH CMETE INFRMTIN By Ezo Mch IM epnt Sees # My 8 INSTITUTE FR MTHEMTICS ND ITS ICTINS UNIVERSITY F MINNEST nd Hll 7 Chuch Steet S.E. Mnnepols Mnnesot 5555 6
SOME REMARKS ON HORIZONTAL, SLANT, PARABOLIC AND POLYNOMIAL ASYMPTOTE
 D I D A C T I C S O F A T H E A T I C S No (4) 3 SOE REARKS ON HORIZONTAL, SLANT, PARABOLIC AND POLYNOIAL ASYPTOTE Tdeusz Jszk Abstct I the techg o clculus, we cosde hozotl d slt symptote I ths ppe the
D I D A C T I C S O F A T H E A T I C S No (4) 3 SOE REARKS ON HORIZONTAL, SLANT, PARABOLIC AND POLYNOIAL ASYPTOTE Tdeusz Jszk Abstct I the techg o clculus, we cosde hozotl d slt symptote I ths ppe the
DEPARTMENT OF CIVIL AND ENVIRONMENTAL ENGINEERING FLUID MECHANICS III Solutions to Problem Sheet 3
 DEPATMENT OF CIVIL AND ENVIONMENTAL ENGINEEING FLID MECHANICS III Solutions to Poblem Sheet 3 1. An tmospheic vote is moelle s combintion of viscous coe otting s soli boy with ngul velocity Ω n n iottionl
DEPATMENT OF CIVIL AND ENVIONMENTAL ENGINEEING FLID MECHANICS III Solutions to Poblem Sheet 3 1. An tmospheic vote is moelle s combintion of viscous coe otting s soli boy with ngul velocity Ω n n iottionl
Representing Curves. Representing Curves. 3D Objects Representation. Objects Representation. General Techniques. Curves Representation
 Reresentng Crves Fole & n Dm, Chter Reresentng Crves otvtons ehnqes for Ojet Reresentton Crves Reresentton Free Form Reresentton Aromton n Interolton Prmetr Polnomls Prmetr n eometr Contnt Polnoml Slnes
Reresentng Crves Fole & n Dm, Chter Reresentng Crves otvtons ehnqes for Ojet Reresentton Crves Reresentton Free Form Reresentton Aromton n Interolton Prmetr Polnomls Prmetr n eometr Contnt Polnoml Slnes
Exam 1. Sept. 22, 8:00-9:30 PM EE 129. Material: Chapters 1-8 Labs 1-3
 Eam ept., 8:00-9:30 PM EE 9 Mateal: Chapte -8 Lab -3 tandadzaton and Calbaton: Ttaton: ue of tandadzed oluton to detemne the concentaton of an unknown. Rele on a eacton of known tochomet, a oluton wth
Eam ept., 8:00-9:30 PM EE 9 Mateal: Chapte -8 Lab -3 tandadzaton and Calbaton: Ttaton: ue of tandadzed oluton to detemne the concentaton of an unknown. Rele on a eacton of known tochomet, a oluton wth
Optimization. x = 22 corresponds to local maximum by second derivative test
 Optimiztion Lectue 17 discussed the exteme vlues of functions. This lectue will pply the lesson fom Lectue 17 to wod poblems. In this section, it is impotnt to emembe we e in Clculus I nd e deling one-vible
Optimiztion Lectue 17 discussed the exteme vlues of functions. This lectue will pply the lesson fom Lectue 17 to wod poblems. In this section, it is impotnt to emembe we e in Clculus I nd e deling one-vible
Energy Dissipation Gravitational Potential Energy Power
 Lectue 4 Chpte 8 Physics I 0.8.03 negy Dissiption Gvittionl Potentil negy Powe Couse wesite: http://fculty.uml.edu/andiy_dnylov/teching/physicsi Lectue Cptue: http://echo360.uml.edu/dnylov03/physicsfll.html
Lectue 4 Chpte 8 Physics I 0.8.03 negy Dissiption Gvittionl Potentil negy Powe Couse wesite: http://fculty.uml.edu/andiy_dnylov/teching/physicsi Lectue Cptue: http://echo360.uml.edu/dnylov03/physicsfll.html
VECTORS VECTORS VECTORS VECTORS. 2. Vector Representation. 1. Definition. 3. Types of Vectors. 5. Vector Operations I. 4. Equal and Opposite Vectors
 1. Defnton A vetor s n entt tht m represent phsl quntt tht hs mgntude nd dreton s opposed to slr tht ls dreton.. Vetor Representton A vetor n e represented grphll n rrow. The length of the rrow s the mgntude
1. Defnton A vetor s n entt tht m represent phsl quntt tht hs mgntude nd dreton s opposed to slr tht ls dreton.. Vetor Representton A vetor n e represented grphll n rrow. The length of the rrow s the mgntude
INATTENTIVE HYPERACTIVE
 REPO RT Th nky ouf o k ngamenc n ADDT ypet e B edonyou n we youm yh ve C ADD Whenmo peop e h nk bouadd hey h nk bou h ype Peop ew hc ADD u u y how ne y ge; he hype v y on nneedf oex emen nd ( ome me )
REPO RT Th nky ouf o k ngamenc n ADDT ypet e B edonyou n we youm yh ve C ADD Whenmo peop e h nk bouadd hey h nk bou h ype Peop ew hc ADD u u y how ne y ge; he hype v y on nneedf oex emen nd ( ome me )
13.5. Torsion of a curve Tangential and Normal Components of Acceleration
 13.5 osion of cuve ngentil nd oml Components of Acceletion Recll: Length of cuve '( t) Ac length function s( t) b t u du '( t) Ac length pmetiztion ( s) with '( s) 1 '( t) Unit tngent vecto '( t) Cuvtue:
13.5 osion of cuve ngentil nd oml Components of Acceletion Recll: Length of cuve '( t) Ac length function s( t) b t u du '( t) Ac length pmetiztion ( s) with '( s) 1 '( t) Unit tngent vecto '( t) Cuvtue:
Condensed Plasmoids The Intermediate State of LENR
 Conense Plsmos The Intemete Stte of ER ut Jtne www.onense-plsmos.om Gemny E-ml: lut.tne@t-one.e Abstt Ths oument esbes new theoy of ER bse on the expementl n theoetl fnngs of othe esehes suh s Ken Shoules
Conense Plsmos The Intemete Stte of ER ut Jtne www.onense-plsmos.om Gemny E-ml: lut.tne@t-one.e Abstt Ths oument esbes new theoy of ER bse on the expementl n theoetl fnngs of othe esehes suh s Ken Shoules
Fluids & Bernoulli s Equation. Group Problems 9
 Goup Poblems 9 Fluids & Benoulli s Eqution Nme This is moe tutoil-like thn poblem nd leds you though conceptul development of Benoulli s eqution using the ides of Newton s 2 nd lw nd enegy. You e going
Goup Poblems 9 Fluids & Benoulli s Eqution Nme This is moe tutoil-like thn poblem nd leds you though conceptul development of Benoulli s eqution using the ides of Newton s 2 nd lw nd enegy. You e going
TWO INTERFACIAL COLLINEAR GRIFFITH CRACKS IN THERMO- ELASTIC COMPOSITE MEDIA
 WO INERFIL OLLINER GRIFFIH RS IN HERMO- ELSI OMOSIE MEDI h m MISHR S DS * Deme o Mheml See I Ie o eholog BHU V-5 I he oee o he le o he e e o eeg o o olle Gh e he ee o he wo ohoo mel e e e emee el. he olem
WO INERFIL OLLINER GRIFFIH RS IN HERMO- ELSI OMOSIE MEDI h m MISHR S DS * Deme o Mheml See I Ie o eholog BHU V-5 I he oee o he le o he e e o eeg o o olle Gh e he ee o he wo ohoo mel e e e emee el. he olem
Data Structures. Element Uniqueness Problem. Hash Tables. Example. Hash Tables. Dana Shapira. 19 x 1. ) h(x 4. ) h(x 2. ) h(x 3. h(x 1. x 4. x 2.
 h(x 4. ) h(x 2. ) h(x 3. h(x 1. x 4. x 2.") Element Uniqueness Poblem Dt Stuctues Let x,..., xn < m Detemine whethe thee exist i j such tht x i =x j Sot Algoithm Bucket Sot Dn Shpi Hsh Tbles fo (i=;i
Element Uniqueness Poblem Dt Stuctues Let x,..., xn < m Detemine whethe thee exist i j such tht x i =x j Sot Algoithm Bucket Sot Dn Shpi Hsh Tbles fo (i=;i