Signals & Systems Chapter3
|
|
|
- Silas Lucas
- 5 years ago
- Views:
Transcription
1 Sigals & Systems Chapter3
2 1.2 Discrete-Time (D-T) Sigals Electroic systems do most of the processig of a sigal usig a computer. A computer ca t directly process a C-T sigal but istead eeds a stream of umbers which is a D-T sigal. Sesor Aalog Electroics ADC DSP Computer Physical C-T Sigal Electrical C-T Sigal Electrical C-T System Electrical C-T Sigal Electrical D-T Sigal Electrical D-T System Electrical D-T Sigal
3 What is a discrete-time (D-T) sigal? A discrete time sigal is a sequece of umbers idexed by itegers Example: x[] =, - 3, -2, -1, 0, 1, 2, 3, Brackets idicate discrete-time sigal. Recall we used paretheses to idicate a C-T sigal. A stem plot emphasizes that the sigal does ot exist i-betwee iteger values x[]
4 D-T systems allow us to process iformatio i much more amazig ways tha C-T systems! Sesor T 2T 3T x(t) C-T system (RLC, etc.) y(t) Aalog to Digital Coverter (ADC) y[] D-T system (computer) z[] samplig is how we typically get D-T sigals I this case the D-T sigal y[] is related to the C-T sigal y(t) by: y[] = y(t) t =T = y(t ) T = time spacig betwee samples (secods) 1/T = samplig rate (F s ) i samples/secod T is samplig iterval F s is samplig rate
5 Major Questio: How fast should we sample a specific sigal? (We ca t aswer that util samplig theory!!) Hit: You may kow that humas ca t hear frequecies above approximately 20kHz. Therefore, audio sigals typically are limited to have o frequecies above 20kHz.
6 Some Commo D-T Sigals Much of what we leared about C-T sigals carries over to D-T sigals The D-T Uit Step is defied i a obviously similar way that the C-T Uit Step was defied. The D-T uit step is just a sampled versio of the C-T uit step The same holds true for the D-T Uit Ramp. However there are a Few Exceptios
7 Uit Pulse: δ[] D-T Impulse or D-T Delta δ[] 1 δ [ ] 1, = 0 = 0, 0 Note: δ[] is ot a sampled versio of δ[t]
![Siftig Property for D-T Delta Fuctio Note: δ[] works](/docs-images/89/98815166/images/8-0.jpg "iside summatios the same way δ(t) works iside")
8 Siftig Property for D-T Delta Fuctio Note: δ[] works iside summatios the same way δ(t) works iside itegrals
9 D-T Uit step fuctio The DT uit impulse is the first differece of the DT uit-step
10 D-T Siusoids Use upper case omega for frequecy of D-T siusoids x[ ] = A cos( Ω + θ ) What is the uit for Ω? Ω i radias Ω is how may radias jump for each sample Ω is i radias/sample Ω = 2π π π π cos( + ) Ω= = 24 sample i oe cycle 24 cycle per sample
11 Size of Discrete-Time Sigal E x = = [ ] x 2 a ecessary coditio for thr eergy to be fiite is that the sigal amplitude must 0 as other wise the sum will ot coverge P x = 1 lim 2 N + 1 N N N [ ] x 2 E p x x fiite fiite eergy sigal power sigal
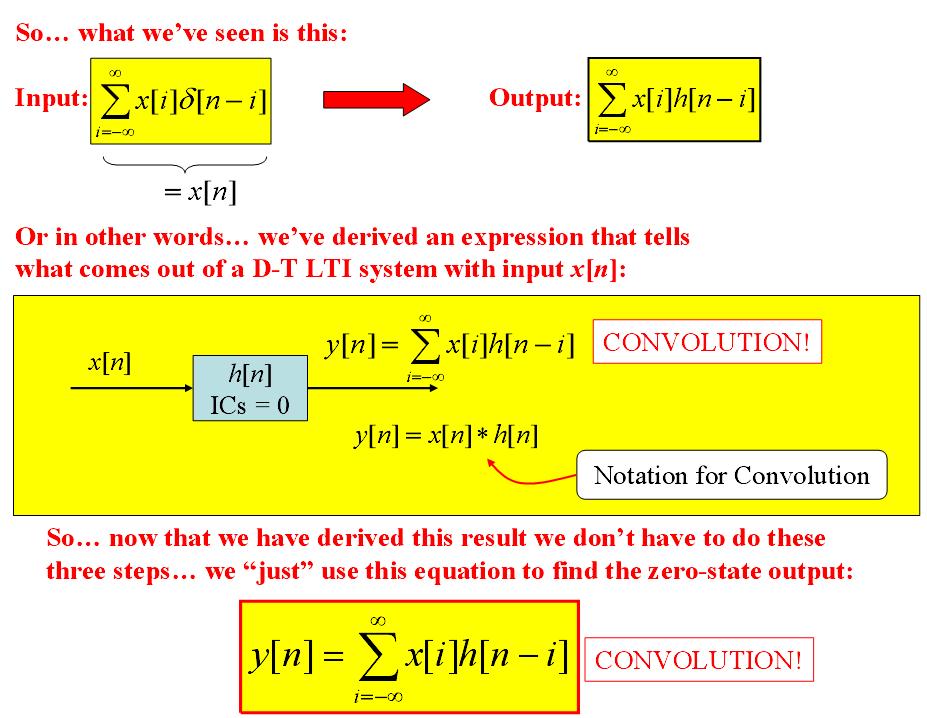
12 D-T Covolutio: The Tool for Fidig the Zero-State Respose

13 Covolutio Our Iterest: Fidig the output of LTI systems (D-T & C-T cases)
14 Covolutio for LTI D-T systems We are tryig to fid y[] so the ICs = 0 i.e. o stored eergy x[] LTI D-T system ICs = 0 y[] Before we ca fid the Z-S outptut we eed somethig first: Impulse Respose ( uit-impulse respose ) The impulse respose h[] is what comes out whe δ[] goes i w/ ICs=0 δ[] h[] δ[] LTI h[] D-T system Note: If system is causal, ICs = 0 the h[] = 0 for < 0
15 The impulse respose h[] uiquely describes the system so we ca idetify the system by specifyig its impulse respose h[]. Thus, we ofte show the system usig a block diagram with the system s impulse respose h[] iside the box represetig the system: x[] LTI D-T system with h[] y[] Because impulse respose is oly defied for LTI systems, if you see a box with the symbol h[] iside it you ca assume that the system is a LTI system. x[] h[] y[]
16 How do we kow/get the impulse respose h[]? May possible ways: 1. Give by the desiger of D-T systems 2. Measured experimetally -Put i sequece See what comes out 3. Mathematically aalyze the D-T system -Give differece equatio -Derive h[] I what form will we kow h[]? 1. h[] kow aalytically as a fuctio ] = 1 []
![Example of aalytically fidig h[] Give a system described by a 1 st order differece equatio: y[] = ay[ 1] + bx[] Recall that h[] is what comes out whe δ [] goes i (with zero ICs).](/docs-images/89/98815166/images/17-0.jpg "So we ca re-write the above differece equatio as follows: h[] = ah[ 1] + bδ [] (a ad b are arbitrary umbers) Here we solve for h[] recursively ad the examie the results to deduce a closedform solutio")
17 Example of aalytically fidig h[] Give a system described by a 1 st order differece equatio: y[] = ay[ 1] + bx[] Recall that h[] is what comes out whe δ [] goes i (with zero ICs). So we ca re-write the above differece equatio as follows: h[] = ah[ 1] + bδ [] (a ad b are arbitrary umbers) Here we solve for h[] recursively ad the examie the results to deduce a closedform solutio (ote: we ca t always use this deductive approach):
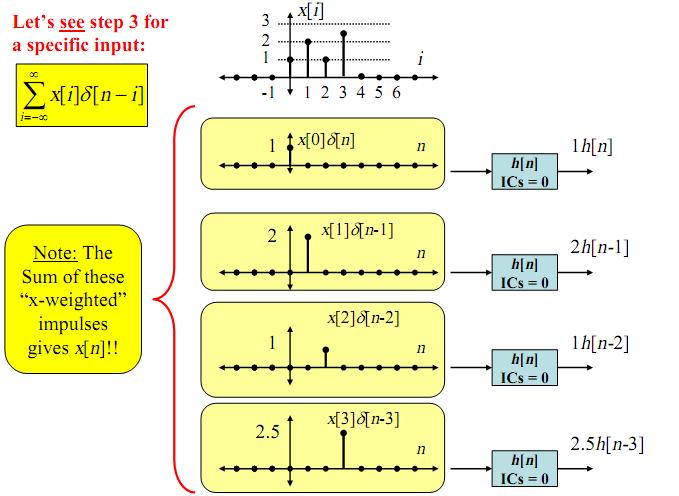
18 Q: How do we use h[] to fid the Zero-State Respose? A: Covolutio We ll go through three aalysis steps that will derive The Geeral Aswer that covolutio is what we eed to do to fid the zerostate respose After that we wo t eed to re-do these steps we ll just Do Covolutio Step 1: Usig time-ivariace we kow: δ[-i] h[] (w/ ICs = 0) h[-i] Shifted iput gives shifted output Step 2: Use homogeeity part of liearity: The iput is a fuctio of so we view x[i] as a fixed umber for a give i x[i]δ[-i] h[] (w/ ICs = 0) So we scale the output by the same fixed umber x[i]h[-i]
19 Step 3: Use additivity part of liearity I Step 2 we looked at iputs like this: x[i]δ[-i] h[] ICs = 0 x[i]h[-i] For each i, a differet iput For each i, a differet respose Now we use the additivity part of liearity: Put the Sum of Those Iputs I Get the Iput: x[i]δ [ i] i = Sum of Their Resposes Output: x[i]h[ i] i = Out But what is this?? O the ext slide we show that it is the desired iput sigal x[]!
20 13/14
21
22
23 2.2 Computig D-T covolutio -We kow about the impulse respose h[] -We foud out that h[] iteracts with x[] through covolutio to give the zero-state respose Two cases, depedig o form of x[]: = y [ ] x [ m] h[ m] m = 1. x[] is kow Uaalytically 2. x[] is kow UumericallyU or Ugraphically UAalytical Covolutio (used for by-had aalysis):u Pretty straightforward coceptually: - put fuctios ito covolutio summatio - exploit math properties to evaluate/simplify
24 Example: x[] = a u[] h[] = b u[] Recall this form from 1 st - order differece equatio example a u[] b u[] y[] =? m m y [ ] = x [ m] h[ m] = a u[ m] b u[ m] m= 1, m 0 ow use u [ m ] = 0, m 0 m m 1, m = a b u[ m] ow use u[ m] = m = 0 0, m = a b m m m= a = b b m= 0 m= 0 m
![[ ] 0 m m a y b b = = If a = b you are addig ( + 1) 1 s ad that gives + 1 If a b,](/docs-images/89/98815166/images/25-0.jpg "the a stadard math relatioship give 1 Geometric Sum, r 1 1 a N N i i a r r r r + =")
25 [ ] 0 m m a y b b = = If a = b you are addig ( + 1) 1 s ad that gives + 1 If a b, the a stadard math relatioship give 1 Geometric Sum, r 1 1 a N N i i a r r r r + = =
26 Graphical Covolutio Steps Ca do covolutio this way whe sigals are kow umerically or by equatio - Covolutio ivolves the sum of a product of two sigals: x[m]h[ m] - At each output idex, the product chages Repeat for each UStep 1U: Write both as fuctios of m: x[m] &h[m] Step 2: Flip h[m] to get h[-m] Step 3: For each output idex value of iterest, shift by to get h[ -m] Step 4: Form product x[m]h[ m] ad sum its elemets to get the umber y[]
27 Example of Graphical Covolutio x[] h[]... Fid y[]=x[]*h[] for all iteger values of Solutio
28 Step 1: Write both as fuctios of m: x[m] & h[m] h[m] m x[m] m Step 2: Flip x[m] to get x[-m] h[m] x[-m] 2 1
29
30 Steps 3&4 for all < 0 Step 3: For < 0, shift by to get x[ - m ]... 3 h[m] x[-1 - m] 2... m Negative gives a left-shift Show here for = Step 4: For < 0, Form the product x[m]h[ m] ad sum its elemets to give y[]... h[m]x[-1 - m] = 0... Sum over m y[] = 0 < m
31
32 Steps 3&4 for = 1 Step 3: For = 1, shift by to get x[ - m] h[m] x[1 - m]... m Positive gives a Right-shift m Step 4: For = 1, Form the product x[m]h[ m] ad sum its elemets to give y[]... x[1 - m] h[m] Sum over m y[1] = = 12 m
33
34 Complete for all So ow we kow the values of y[] for all values of We just eed to put it all together as a fuctio Here it is easiest to just plot it you could also list it as a table y[]
35 So what we have just doe is foud the zero-state output of a system havig a impulse respose give by this h[] whe the iput is give by this x[]: x[] x[]... 3 h[] h[] y[] = x[] * h[] y[]
36
37 Additio Method of Discrete-Time Covolutio Produces the same output as the graphical method Effectively a short cut method Let x[] = 0 for all <N Let h[] = 0 for all <M (sample value N is the first o-zero value of x[] (sample value M is the first o-zero value of h[] y for M [ ] = x[ ] h[ ] = x[ i] h[ i] for M + N i= N 0 < M + N To compute the covolutio, use the followig array
38 Discrete-Time Covolutio Array Sum dow a colum x[n] x[n+1] x[n+2] x[n+3] h[m] h[m+1] h[m+2] h[m+3] x[n]h[m] x[n+1]h[m] x[n+2]h[m] x[n+3]h[m] x[n]h[m+1] x[n+1]h[m+1] x[n_2]h[m+1] x[n]h[m+2] x[n+1]h[m+2] + 1st row values of x[] 2d row values of h[] (1 st row) x (1 st elemet of 2 d row) (1 st row) x (2 d elemet of 2 d row) (1 st row) x (3 rd elemet of 2 d row) y[n+m] y[n+m+1] y[n+m+2] y[n+m+3] The resultig values i the output sequece
39 Discrete-Time Covolutio Example Fid the output of a system if the iput ad impulse respose are give as follows. [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] h x δ δ δ δ δ δ δ = = Solutio The, N = -1 Idex of the first o-zero value of x[] M = -2 Idex of the first o-zero value of h[] Next, write a array
40 Discrete-Time Covolutio Example Coefficiets of x[] Coefficiets of h[] First Row times (-1) First Row times (5) First Row times (3) Summatio of colums y[] = 0 for < N+M = -3 y [ ] = δ [ + 3] + 3δ [ + 3] + 10δ [ + 1] + 17δ [ ] + 29δ [ 1] + 12δ [ 2]
41 D-T Covolutio Examples x[] = ( ) 1 u[] 2 h[i] h[] = u[] u[ 5] x[i] i i Choose to flip ad slide h[] This shows h[-i] for = 0 h[ i] i
42 chagig poit : 0,-4, sth, 0 y [ ] = sth,0 4 sth,4
43
44 Now for = 4, = 5, = 4 case x[i] i h[ i] = 5 case h[ i] = h[5 i] i = 4 i = i i
45 Notice that: for = 4, 5, 6, for 4 [ ] ( 1 ) y = = 2 i = 4 i ( ) 1 ( 1 ) ( ) So 0, = 2 1, ( ) 4 ( ) , [ ] ( 1 ) y
46 . Same Impulse Respose: h[] x[] = cos(π u[] 2 x[m] etc Agai y[] = 0 for < 0: h[ m] i m y [ 0] = 1 y [ 1 ] = = 1 y [ 2] = = 0 y [ 3 ] = = 0 y [4] = = 0 y [ ] 5 = = 0 Notice: y[] = 0 = 2, 3, 4, 5,!
47
EECE 301 Signals & Systems
 EECE 301 Sigals & Systems Prof. Mark Fowler Note Set #8 D-T Covolutio: The Tool for Fidig the Zero-State Respose Readig Assigmet: Sectio 2.1-2.2 of Kame ad Heck 1/14 Course Flow Diagram The arrows here
EECE 301 Sigals & Systems Prof. Mark Fowler Note Set #8 D-T Covolutio: The Tool for Fidig the Zero-State Respose Readig Assigmet: Sectio 2.1-2.2 of Kame ad Heck 1/14 Course Flow Diagram The arrows here
EEO 401 Digital Signal Processing Prof. Mark Fowler
 EEO 40 Digital Sigal Processig Prof. Mark Fowler Note Set #3 Covolutio & Impulse Respose Review Readig Assigmet: Sect. 2.3 of Proakis & Maolakis / Covolutio for LTI D-T systems We are tryig to fid y(t)
EEO 40 Digital Sigal Processig Prof. Mark Fowler Note Set #3 Covolutio & Impulse Respose Review Readig Assigmet: Sect. 2.3 of Proakis & Maolakis / Covolutio for LTI D-T systems We are tryig to fid y(t)
ECE-S352 Introduction to Digital Signal Processing Lecture 3A Direct Solution of Difference Equations
 ECE-S352 Itroductio to Digital Sigal Processig Lecture 3A Direct Solutio of Differece Equatios Discrete Time Systems Described by Differece Equatios Uit impulse (sample) respose h() of a DT system allows
ECE-S352 Itroductio to Digital Sigal Processig Lecture 3A Direct Solutio of Differece Equatios Discrete Time Systems Described by Differece Equatios Uit impulse (sample) respose h() of a DT system allows
EE / EEE SAMPLE STUDY MATERIAL. GATE, IES & PSUs Signal System. Electrical Engineering. Postal Correspondence Course
 Sigal-EE Postal Correspodece Course 1 SAMPLE STUDY MATERIAL Electrical Egieerig EE / EEE Postal Correspodece Course GATE, IES & PSUs Sigal System Sigal-EE Postal Correspodece Course CONTENTS 1. SIGNAL
Sigal-EE Postal Correspodece Course 1 SAMPLE STUDY MATERIAL Electrical Egieerig EE / EEE Postal Correspodece Course GATE, IES & PSUs Sigal System Sigal-EE Postal Correspodece Course CONTENTS 1. SIGNAL
6.3 Testing Series With Positive Terms
 6.3. TESTING SERIES WITH POSITIVE TERMS 307 6.3 Testig Series With Positive Terms 6.3. Review of what is kow up to ow I theory, testig a series a i for covergece amouts to fidig the i= sequece of partial
6.3. TESTING SERIES WITH POSITIVE TERMS 307 6.3 Testig Series With Positive Terms 6.3. Review of what is kow up to ow I theory, testig a series a i for covergece amouts to fidig the i= sequece of partial
Math 113 Exam 3 Practice
 Math Exam Practice Exam will cover.-.9. This sheet has three sectios. The first sectio will remid you about techiques ad formulas that you should kow. The secod gives a umber of practice questios for you
Math Exam Practice Exam will cover.-.9. This sheet has three sectios. The first sectio will remid you about techiques ad formulas that you should kow. The secod gives a umber of practice questios for you
Time-Domain Representations of LTI Systems
 2.1 Itroductio Objectives: 1. Impulse resposes of LTI systems 2. Liear costat-coefficiets differetial or differece equatios of LTI systems 3. Bloc diagram represetatios of LTI systems 4. State-variable
2.1 Itroductio Objectives: 1. Impulse resposes of LTI systems 2. Liear costat-coefficiets differetial or differece equatios of LTI systems 3. Bloc diagram represetatios of LTI systems 4. State-variable
Discrete-Time Systems, LTI Systems, and Discrete-Time Convolution
 EEL5: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we begi our mathematical treatmet of discrete-time s. As show i Figure, a discrete-time operates or trasforms some iput sequece x [
EEL5: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we begi our mathematical treatmet of discrete-time s. As show i Figure, a discrete-time operates or trasforms some iput sequece x [
Mathematical Description of Discrete-Time Signals. 9/10/16 M. J. Roberts - All Rights Reserved 1
 Mathematical Descriptio of Discrete-Time Sigals 9/10/16 M. J. Roberts - All Rights Reserved 1 Samplig ad Discrete Time Samplig is the acquisitio of the values of a cotiuous-time sigal at discrete poits
Mathematical Descriptio of Discrete-Time Sigals 9/10/16 M. J. Roberts - All Rights Reserved 1 Samplig ad Discrete Time Samplig is the acquisitio of the values of a cotiuous-time sigal at discrete poits
Frequency Response of FIR Filters
 EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we itroduce the idea of the frequecy respose of LTI systems, ad focus specifically o the frequecy respose of FIR filters.. Steady-state
EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we itroduce the idea of the frequecy respose of LTI systems, ad focus specifically o the frequecy respose of FIR filters.. Steady-state
Signal Processing. Lecture 02: Discrete Time Signals and Systems. Ahmet Taha Koru, Ph. D. Yildiz Technical University.
 Sigal Processig Lecture 02: Discrete Time Sigals ad Systems Ahmet Taha Koru, Ph. D. Yildiz Techical Uiversity 2017-2018 Fall ATK (YTU) Sigal Processig 2017-2018 Fall 1 / 51 Discrete Time Sigals Discrete
Sigal Processig Lecture 02: Discrete Time Sigals ad Systems Ahmet Taha Koru, Ph. D. Yildiz Techical Uiversity 2017-2018 Fall ATK (YTU) Sigal Processig 2017-2018 Fall 1 / 51 Discrete Time Sigals Discrete
Module 18 Discrete Time Signals and Z-Transforms Objective: Introduction : Description: Discrete Time Signal representation
 Module 8 Discrete Time Sigals ad Z-Trasforms Objective:To uderstad represetig discrete time sigals, apply z trasform for aalyzigdiscrete time sigals ad to uderstad the relatio to Fourier trasform Itroductio
Module 8 Discrete Time Sigals ad Z-Trasforms Objective:To uderstad represetig discrete time sigals, apply z trasform for aalyzigdiscrete time sigals ad to uderstad the relatio to Fourier trasform Itroductio
Z - Transform. It offers the techniques for digital filter design and frequency analysis of digital signals.
 Z - Trasform The -trasform is a very importat tool i describig ad aalyig digital systems. It offers the techiques for digital filter desig ad frequecy aalysis of digital sigals. Defiitio of -trasform:
Z - Trasform The -trasform is a very importat tool i describig ad aalyig digital systems. It offers the techiques for digital filter desig ad frequecy aalysis of digital sigals. Defiitio of -trasform:
Olli Simula T / Chapter 1 3. Olli Simula T / Chapter 1 5
 Sigals ad Systems Sigals ad Systems Sigals are variables that carry iformatio Systemstake sigals as iputs ad produce sigals as outputs The course deals with the passage of sigals through systems T-6.4
Sigals ad Systems Sigals ad Systems Sigals are variables that carry iformatio Systemstake sigals as iputs ad produce sigals as outputs The course deals with the passage of sigals through systems T-6.4
Introduction to Signals and Systems, Part V: Lecture Summary
 EEL33: Discrete-Time Sigals ad Systems Itroductio to Sigals ad Systems, Part V: Lecture Summary Itroductio to Sigals ad Systems, Part V: Lecture Summary So far we have oly looked at examples of o-recursive
EEL33: Discrete-Time Sigals ad Systems Itroductio to Sigals ad Systems, Part V: Lecture Summary Itroductio to Sigals ad Systems, Part V: Lecture Summary So far we have oly looked at examples of o-recursive
SECTION 1.5 : SUMMATION NOTATION + WORK WITH SEQUENCES
 SECTION 1.5 : SUMMATION NOTATION + WORK WITH SEQUENCES Read Sectio 1.5 (pages 5 9) Overview I Sectio 1.5 we lear to work with summatio otatio ad formulas. We will also itroduce a brief overview of sequeces,
SECTION 1.5 : SUMMATION NOTATION + WORK WITH SEQUENCES Read Sectio 1.5 (pages 5 9) Overview I Sectio 1.5 we lear to work with summatio otatio ad formulas. We will also itroduce a brief overview of sequeces,
MAS160: Signals, Systems & Information for Media Technology. Problem Set 5. DUE: November 3, (a) Plot of u[n] (b) Plot of x[n]=(0.
![MAS160: Signals, Systems & Information for Media Technology. Problem Set 5. DUE: November 3, (a) Plot of u[n] (b) Plot of x[n]=(0.](/thumbs/94/122054675.jpg "MAS160: Signals, Systems & Information for Media Technology. Problem Set 5. DUE: November 3, (a) Plot of u[n] (b) Plot of x[n]=(0.") MAS6: Sigals, Systems & Iformatio for Media Techology Problem Set 5 DUE: November 3, 3 Istructors: V. Michael Bove, Jr. ad Rosalid Picard T.A. Jim McBride Problem : Uit-step ad ruig average (DSP First
MAS6: Sigals, Systems & Iformatio for Media Techology Problem Set 5 DUE: November 3, 3 Istructors: V. Michael Bove, Jr. ad Rosalid Picard T.A. Jim McBride Problem : Uit-step ad ruig average (DSP First
The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j
![The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j](/thumbs/82/85448534.jpg "The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j") The -Trasform 7. Itroductio Geeralie the complex siusoidal represetatio offered by DTFT to a represetatio of complex expoetial sigals. Obtai more geeral characteristics for discrete-time LTI systems. 7.
The -Trasform 7. Itroductio Geeralie the complex siusoidal represetatio offered by DTFT to a represetatio of complex expoetial sigals. Obtai more geeral characteristics for discrete-time LTI systems. 7.
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science. BACKGROUND EXAM September 30, 2004.
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Departmet of Electrical Egieerig ad Computer Sciece 6.34 Discrete Time Sigal Processig Fall 24 BACKGROUND EXAM September 3, 24. Full Name: Note: This exam is closed
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Departmet of Electrical Egieerig ad Computer Sciece 6.34 Discrete Time Sigal Processig Fall 24 BACKGROUND EXAM September 3, 24. Full Name: Note: This exam is closed
Signal Processing in Mechatronics. Lecture 3, Convolution, Fourier Series and Fourier Transform
 Sigal Processig i Mechatroics Summer semester, 1 Lecture 3, Covolutio, Fourier Series ad Fourier rasform Dr. Zhu K.P. AIS, UM 1 1. Covolutio Covolutio Descriptio of LI Systems he mai premise is that the
Sigal Processig i Mechatroics Summer semester, 1 Lecture 3, Covolutio, Fourier Series ad Fourier rasform Dr. Zhu K.P. AIS, UM 1 1. Covolutio Covolutio Descriptio of LI Systems he mai premise is that the
DIGITAL SIGNAL PROCESSING LECTURE 3
 DIGITAL SIGNAL PROCESSING LECTURE 3 Fall 2 2K8-5 th Semester Tahir Muhammad tmuhammad_7@yahoo.com Cotet ad Figures are from Discrete-Time Sigal Processig, 2e by Oppeheim, Shafer, ad Buc, 999-2 Pretice
DIGITAL SIGNAL PROCESSING LECTURE 3 Fall 2 2K8-5 th Semester Tahir Muhammad tmuhammad_7@yahoo.com Cotet ad Figures are from Discrete-Time Sigal Processig, 2e by Oppeheim, Shafer, ad Buc, 999-2 Pretice
1 Generating functions for balls in boxes
 Math 566 Fall 05 Some otes o geeratig fuctios Give a sequece a 0, a, a,..., a,..., a geeratig fuctio some way of represetig the sequece as a fuctio. There are may ways to do this, with the most commo ways
Math 566 Fall 05 Some otes o geeratig fuctios Give a sequece a 0, a, a,..., a,..., a geeratig fuctio some way of represetig the sequece as a fuctio. There are may ways to do this, with the most commo ways
FIR Filters. Lecture #7 Chapter 5. BME 310 Biomedical Computing - J.Schesser
 FIR Filters Lecture #7 Chapter 5 8 What Is this Course All About? To Gai a Appreciatio of the Various Types of Sigals ad Systems To Aalyze The Various Types of Systems To Lear the Skills ad Tools eeded
FIR Filters Lecture #7 Chapter 5 8 What Is this Course All About? To Gai a Appreciatio of the Various Types of Sigals ad Systems To Aalyze The Various Types of Systems To Lear the Skills ad Tools eeded
2D DSP Basics: 2D Systems
 - Digital Image Processig ad Compressio D DSP Basics: D Systems D Systems T[ ] y = T [ ] Liearity Additivity: If T y = T [ ] The + T y = y + y Homogeeity: If The T y = T [ ] a T y = ay = at [ ] Liearity
- Digital Image Processig ad Compressio D DSP Basics: D Systems D Systems T[ ] y = T [ ] Liearity Additivity: If T y = T [ ] The + T y = y + y Homogeeity: If The T y = T [ ] a T y = ay = at [ ] Liearity
The Z-Transform. (t-t 0 ) Figure 1: Simplified graph of an impulse function. For an impulse, it can be shown that (1)
 Figure 1: Simplified graph of an impulse function. For an impulse, it can be shown that (1)") The Z-Trasform Sampled Data The geeralied fuctio (t) (also kow as the impulse fuctio) is useful i the defiitio ad aalysis of sampled-data sigals. Figure below shows a simplified graph of a impulse. (t-t
The Z-Trasform Sampled Data The geeralied fuctio (t) (also kow as the impulse fuctio) is useful i the defiitio ad aalysis of sampled-data sigals. Figure below shows a simplified graph of a impulse. (t-t
ELEG 4603/5173L Digital Signal Processing Ch. 1 Discrete-Time Signals and Systems
 Departmet of Electrical Egieerig Uiversity of Arasas ELEG 4603/5173L Digital Sigal Processig Ch. 1 Discrete-Time Sigals ad Systems Dr. Jigxia Wu wuj@uar.edu OUTLINE 2 Classificatios of discrete-time sigals
Departmet of Electrical Egieerig Uiversity of Arasas ELEG 4603/5173L Digital Sigal Processig Ch. 1 Discrete-Time Sigals ad Systems Dr. Jigxia Wu wuj@uar.edu OUTLINE 2 Classificatios of discrete-time sigals
Question1 Multiple choices (circle the most appropriate one):
:") Philadelphia Uiversity Studet Name: Faculty of Egieerig Studet Number: Dept. of Computer Egieerig Fial Exam, First Semester: 2014/2015 Course Title: Digital Sigal Aalysis ad Processig Date: 01/02/2015
Philadelphia Uiversity Studet Name: Faculty of Egieerig Studet Number: Dept. of Computer Egieerig Fial Exam, First Semester: 2014/2015 Course Title: Digital Sigal Aalysis ad Processig Date: 01/02/2015
Generalizing the DTFT. The z Transform. Complex Exponential Excitation. The Transfer Function. Systems Described by Difference Equations
 Geeraliig the DTFT The Trasform M. J. Roberts - All Rights Reserved. Edited by Dr. Robert Akl 1 The forward DTFT is defied by X e jω = x e jω i which = Ω is discrete-time radia frequecy, a real variable.
Geeraliig the DTFT The Trasform M. J. Roberts - All Rights Reserved. Edited by Dr. Robert Akl 1 The forward DTFT is defied by X e jω = x e jω i which = Ω is discrete-time radia frequecy, a real variable.
Math 113 Exam 3 Practice
 Math Exam Practice Exam 4 will cover.-., 0. ad 0.. Note that eve though. was tested i exam, questios from that sectios may also be o this exam. For practice problems o., refer to the last review. This
Math Exam Practice Exam 4 will cover.-., 0. ad 0.. Note that eve though. was tested i exam, questios from that sectios may also be o this exam. For practice problems o., refer to the last review. This
Computing the output response of LTI Systems.
 Computig the output respose of LTI Systems. By breaig or decomposig ad represetig the iput sigal to the LTI system ito terms of a liear combiatio of a set of basic sigals. Usig the superpositio property
Computig the output respose of LTI Systems. By breaig or decomposig ad represetig the iput sigal to the LTI system ito terms of a liear combiatio of a set of basic sigals. Usig the superpositio property
Solution of EECS 315 Final Examination F09
 Solutio of EECS 315 Fial Examiatio F9 1. Fid the umerical value of δ ( t + 4ramp( tdt. δ ( t + 4ramp( tdt. Fid the umerical sigal eergy of x E x = x[ ] = δ 3 = 11 = ( = ramp( ( 4 = ramp( 8 = 8 [ ] = (
Solutio of EECS 315 Fial Examiatio F9 1. Fid the umerical value of δ ( t + 4ramp( tdt. δ ( t + 4ramp( tdt. Fid the umerical sigal eergy of x E x = x[ ] = δ 3 = 11 = ( = ramp( ( 4 = ramp( 8 = 8 [ ] = (
Chapter 10: Power Series
 Chapter : Power Series 57 Chapter Overview: Power Series The reaso series are part of a Calculus course is that there are fuctios which caot be itegrated. All power series, though, ca be itegrated because
Chapter : Power Series 57 Chapter Overview: Power Series The reaso series are part of a Calculus course is that there are fuctios which caot be itegrated. All power series, though, ca be itegrated because
Definition of z-transform.
 - Trasforms Frequecy domai represetatios of discretetime sigals ad LTI discrete-time systems are made possible with the use of DTFT. However ot all discrete-time sigals e.g. uit step sequece are guarateed
- Trasforms Frequecy domai represetatios of discretetime sigals ad LTI discrete-time systems are made possible with the use of DTFT. However ot all discrete-time sigals e.g. uit step sequece are guarateed
is also known as the general term of the sequence
 Lesso : Sequeces ad Series Outlie Objectives: I ca determie whether a sequece has a patter. I ca determie whether a sequece ca be geeralized to fid a formula for the geeral term i the sequece. I ca determie
Lesso : Sequeces ad Series Outlie Objectives: I ca determie whether a sequece has a patter. I ca determie whether a sequece ca be geeralized to fid a formula for the geeral term i the sequece. I ca determie
Solutions. Number of Problems: 4. None. Use only the prepared sheets for your solutions. Additional paper is available from the supervisors.
 Quiz November 4th, 23 Sigals & Systems (5-575-) P. Reist & Prof. R. D Adrea Solutios Exam Duratio: 4 miutes Number of Problems: 4 Permitted aids: Noe. Use oly the prepared sheets for your solutios. Additioal
Quiz November 4th, 23 Sigals & Systems (5-575-) P. Reist & Prof. R. D Adrea Solutios Exam Duratio: 4 miutes Number of Problems: 4 Permitted aids: Noe. Use oly the prepared sheets for your solutios. Additioal
ELEG3503 Introduction to Digital Signal Processing
 ELEG3503 Itroductio to Digital Sigal Processig 1 Itroductio 2 Basics of Sigals ad Systems 3 Fourier aalysis 4 Samplig 5 Liear time-ivariat (LTI) systems 6 z-trasform 7 System Aalysis 8 System Realizatio
ELEG3503 Itroductio to Digital Sigal Processig 1 Itroductio 2 Basics of Sigals ad Systems 3 Fourier aalysis 4 Samplig 5 Liear time-ivariat (LTI) systems 6 z-trasform 7 System Aalysis 8 System Realizatio
Chapter 2 Systems and Signals
 Chapter 2 Systems ad Sigals 1 Itroductio Discrete-Time Sigals: Sequeces Discrete-Time Systems Properties of Liear Time-Ivariat Systems Liear Costat-Coefficiet Differece Equatios Frequecy-Domai Represetatio
Chapter 2 Systems ad Sigals 1 Itroductio Discrete-Time Sigals: Sequeces Discrete-Time Systems Properties of Liear Time-Ivariat Systems Liear Costat-Coefficiet Differece Equatios Frequecy-Domai Represetatio
Chapter 7: The z-transform. Chih-Wei Liu
 Chapter 7: The -Trasform Chih-Wei Liu Outlie Itroductio The -Trasform Properties of the Regio of Covergece Properties of the -Trasform Iversio of the -Trasform The Trasfer Fuctio Causality ad Stability
Chapter 7: The -Trasform Chih-Wei Liu Outlie Itroductio The -Trasform Properties of the Regio of Covergece Properties of the -Trasform Iversio of the -Trasform The Trasfer Fuctio Causality ad Stability
Math 155 (Lecture 3)
") Math 55 (Lecture 3) September 8, I this lecture, we ll cosider the aswer to oe of the most basic coutig problems i combiatorics Questio How may ways are there to choose a -elemet subset of the set {,,,
Math 55 (Lecture 3) September 8, I this lecture, we ll cosider the aswer to oe of the most basic coutig problems i combiatorics Questio How may ways are there to choose a -elemet subset of the set {,,,
Sigma notation. 2.1 Introduction
 Sigma otatio. Itroductio We use sigma otatio to idicate the summatio process whe we have several (or ifiitely may) terms to add up. You may have see sigma otatio i earlier courses. It is used to idicate
Sigma otatio. Itroductio We use sigma otatio to idicate the summatio process whe we have several (or ifiitely may) terms to add up. You may have see sigma otatio i earlier courses. It is used to idicate
1.3 Convergence Theorems of Fourier Series. k k k k. N N k 1. With this in mind, we state (without proof) the convergence of Fourier series.
 the convergence of Fourier series.") .3 Covergece Theorems of Fourier Series I this sectio, we preset the covergece of Fourier series. A ifiite sum is, by defiitio, a limit of partial sums, that is, a cos( kx) b si( kx) lim a cos( kx) b si(
.3 Covergece Theorems of Fourier Series I this sectio, we preset the covergece of Fourier series. A ifiite sum is, by defiitio, a limit of partial sums, that is, a cos( kx) b si( kx) lim a cos( kx) b si(
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL OF ELECTRICAL AND COMPUTER ENGINEERING
 GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL OF ELECTRICAL AND COMPUTER ENGINEERING ECE 06 Summer 07 Problem Set #5 Assiged: Jue 3, 07 Due Date: Jue 30, 07 Readig: Chapter 5 o FIR Filters. PROBLEM 5..* (The
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL OF ELECTRICAL AND COMPUTER ENGINEERING ECE 06 Summer 07 Problem Set #5 Assiged: Jue 3, 07 Due Date: Jue 30, 07 Readig: Chapter 5 o FIR Filters. PROBLEM 5..* (The
Classification of DT signals
 Comlex exoetial A discrete time sigal may be comlex valued I digital commuicatios comlex sigals arise aturally A comlex sigal may be rereseted i two forms: jarg { z( ) } { } z ( ) = Re { z ( )} + jim {
Comlex exoetial A discrete time sigal may be comlex valued I digital commuicatios comlex sigals arise aturally A comlex sigal may be rereseted i two forms: jarg { z( ) } { } z ( ) = Re { z ( )} + jim {
The Growth of Functions. Theoretical Supplement
 The Growth of Fuctios Theoretical Supplemet The Triagle Iequality The triagle iequality is a algebraic tool that is ofte useful i maipulatig absolute values of fuctios. The triagle iequality says that
The Growth of Fuctios Theoretical Supplemet The Triagle Iequality The triagle iequality is a algebraic tool that is ofte useful i maipulatig absolute values of fuctios. The triagle iequality says that
3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,
![3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,](/thumbs/82/85448051.jpg "3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,") 3. Z Trasform Referece: Etire Chapter 3 of text. Recall that the Fourier trasform (FT) of a DT sigal x [ ] is ω ( ) [ ] X e = j jω k = xe I order for the FT to exist i the fiite magitude sese, S = x [
3. Z Trasform Referece: Etire Chapter 3 of text. Recall that the Fourier trasform (FT) of a DT sigal x [ ] is ω ( ) [ ] X e = j jω k = xe I order for the FT to exist i the fiite magitude sese, S = x [
x[0] x[1] x[2] Figure 2.1 Graphical representation of a discrete-time signal.
![x[0] x[1] x[2] Figure 2.1 Graphical representation of a discrete-time signal.](/thumbs/83/88911754.jpg "x[0] x[1] x[2] Figure 2.1 Graphical representation of a discrete-time signal.") x[ ] x[ ] x[] x[] x[] x[] 9 8 7 6 5 4 3 3 4 5 6 7 8 9 Figure. Graphical represetatio of a discrete-time sigal. From Discrete-Time Sigal Processig, e by Oppeheim, Schafer, ad Buck 999- Pretice Hall, Ic.
x[ ] x[ ] x[] x[] x[] x[] 9 8 7 6 5 4 3 3 4 5 6 7 8 9 Figure. Graphical represetatio of a discrete-time sigal. From Discrete-Time Sigal Processig, e by Oppeheim, Schafer, ad Buck 999- Pretice Hall, Ic.
Recursive Algorithms. Recurrences. Recursive Algorithms Analysis
 Recursive Algorithms Recurreces Computer Sciece & Egieerig 35: Discrete Mathematics Christopher M Bourke cbourke@cseuledu A recursive algorithm is oe i which objects are defied i terms of other objects
Recursive Algorithms Recurreces Computer Sciece & Egieerig 35: Discrete Mathematics Christopher M Bourke cbourke@cseuledu A recursive algorithm is oe i which objects are defied i terms of other objects
ECE4270 Fundamentals of DSP. Lecture 2 Discrete-Time Signals and Systems & Difference Equations. Overview of Lecture 2. More Discrete-Time Systems
 ECE4270 Fudametals of DSP Lecture 2 Discrete-Time Sigals ad Systems & Differece Equatios School of ECE Ceter for Sigal ad Iformatio Processig Georgia Istitute of Techology Overview of Lecture 2 Aoucemet
ECE4270 Fudametals of DSP Lecture 2 Discrete-Time Sigals ad Systems & Differece Equatios School of ECE Ceter for Sigal ad Iformatio Processig Georgia Istitute of Techology Overview of Lecture 2 Aoucemet
Lecture 3. Digital Signal Processing. Chapter 3. z-transforms. Mikael Swartling Nedelko Grbic Bengt Mandersson. rev. 2016
 Lecture 3 Digital Sigal Processig Chapter 3 z-trasforms Mikael Swartlig Nedelko Grbic Begt Madersso rev. 06 Departmet of Electrical ad Iformatio Techology Lud Uiversity z-trasforms We defie the z-trasform
Lecture 3 Digital Sigal Processig Chapter 3 z-trasforms Mikael Swartlig Nedelko Grbic Begt Madersso rev. 06 Departmet of Electrical ad Iformatio Techology Lud Uiversity z-trasforms We defie the z-trasform
2.4 - Sequences and Series
 2.4 - Sequeces ad Series Sequeces A sequece is a ordered list of elemets. Defiitio 1 A sequece is a fuctio from a subset of the set of itegers (usually either the set 80, 1, 2, 3,... < or the set 81, 2,
2.4 - Sequeces ad Series Sequeces A sequece is a ordered list of elemets. Defiitio 1 A sequece is a fuctio from a subset of the set of itegers (usually either the set 80, 1, 2, 3,... < or the set 81, 2,
Signals and Systems. Problem Set: From Continuous-Time to Discrete-Time
 Sigals ad Systems Problem Set: From Cotiuous-Time to Discrete-Time Updated: October 5, 2017 Problem Set Problem 1 - Liearity ad Time-Ivariace Cosider the followig systems ad determie whether liearity ad
Sigals ad Systems Problem Set: From Cotiuous-Time to Discrete-Time Updated: October 5, 2017 Problem Set Problem 1 - Liearity ad Time-Ivariace Cosider the followig systems ad determie whether liearity ad
Unit 6: Sequences and Series
 AMHS Hoors Algebra 2 - Uit 6 Uit 6: Sequeces ad Series 26 Sequeces Defiitio: A sequece is a ordered list of umbers ad is formally defied as a fuctio whose domai is the set of positive itegers. It is commo
AMHS Hoors Algebra 2 - Uit 6 Uit 6: Sequeces ad Series 26 Sequeces Defiitio: A sequece is a ordered list of umbers ad is formally defied as a fuctio whose domai is the set of positive itegers. It is commo
FIR Filter Design: Part II
 EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we cosider how we might go about desigig FIR filters with arbitrary frequecy resposes, through compositio of multiple sigle-peak
EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we cosider how we might go about desigig FIR filters with arbitrary frequecy resposes, through compositio of multiple sigle-peak
Infinite Sequences and Series
 Chapter 6 Ifiite Sequeces ad Series 6.1 Ifiite Sequeces 6.1.1 Elemetary Cocepts Simply speakig, a sequece is a ordered list of umbers writte: {a 1, a 2, a 3,...a, a +1,...} where the elemets a i represet
Chapter 6 Ifiite Sequeces ad Series 6.1 Ifiite Sequeces 6.1.1 Elemetary Cocepts Simply speakig, a sequece is a ordered list of umbers writte: {a 1, a 2, a 3,...a, a +1,...} where the elemets a i represet
Mechatronics. Time Response & Frequency Response 2 nd -Order Dynamic System 2-Pole, Low-Pass, Active Filter
 Time Respose & Frequecy Respose d -Order Dyamic System -Pole, Low-Pass, Active Filter R 4 R 7 C 5 e i R 1 C R 3 - + R 6 - + e out Assigmet: Perform a Complete Dyamic System Ivestigatio of the Two-Pole,
Time Respose & Frequecy Respose d -Order Dyamic System -Pole, Low-Pass, Active Filter R 4 R 7 C 5 e i R 1 C R 3 - + R 6 - + e out Assigmet: Perform a Complete Dyamic System Ivestigatio of the Two-Pole,
ADVANCED DIGITAL SIGNAL PROCESSING
 ADVANCED DIGITAL SIGNAL PROCESSING PROF. S. C. CHAN (email : sccha@eee.hku.hk, Rm. CYC-702) DISCRETE-TIME SIGNALS AND SYSTEMS MULTI-DIMENSIONAL SIGNALS AND SYSTEMS RANDOM PROCESSES AND APPLICATIONS ADAPTIVE
ADVANCED DIGITAL SIGNAL PROCESSING PROF. S. C. CHAN (email : sccha@eee.hku.hk, Rm. CYC-702) DISCRETE-TIME SIGNALS AND SYSTEMS MULTI-DIMENSIONAL SIGNALS AND SYSTEMS RANDOM PROCESSES AND APPLICATIONS ADAPTIVE
CHAPTER 10 INFINITE SEQUENCES AND SERIES
 CHAPTER 10 INFINITE SEQUENCES AND SERIES 10.1 Sequeces 10.2 Ifiite Series 10.3 The Itegral Tests 10.4 Compariso Tests 10.5 The Ratio ad Root Tests 10.6 Alteratig Series: Absolute ad Coditioal Covergece
CHAPTER 10 INFINITE SEQUENCES AND SERIES 10.1 Sequeces 10.2 Ifiite Series 10.3 The Itegral Tests 10.4 Compariso Tests 10.5 The Ratio ad Root Tests 10.6 Alteratig Series: Absolute ad Coditioal Covergece
Sequences A sequence of numbers is a function whose domain is the positive integers. We can see that the sequence
 Sequeces A sequece of umbers is a fuctio whose domai is the positive itegers. We ca see that the sequece 1, 1, 2, 2, 3, 3,... is a fuctio from the positive itegers whe we write the first sequece elemet
Sequeces A sequece of umbers is a fuctio whose domai is the positive itegers. We ca see that the sequece 1, 1, 2, 2, 3, 3,... is a fuctio from the positive itegers whe we write the first sequece elemet
Chapter 6 Overview: Sequences and Numerical Series. For the purposes of AP, this topic is broken into four basic subtopics:
 Chapter 6 Overview: Sequeces ad Numerical Series I most texts, the topic of sequeces ad series appears, at first, to be a side topic. There are almost o derivatives or itegrals (which is what most studets
Chapter 6 Overview: Sequeces ad Numerical Series I most texts, the topic of sequeces ad series appears, at first, to be a side topic. There are almost o derivatives or itegrals (which is what most studets
Practical Spectral Anaysis (continue) (from Boaz Porat s book) Frequency Measurement
 (from Boaz Porat s book) Frequency Measurement") Practical Spectral Aaysis (cotiue) (from Boaz Porat s book) Frequecy Measuremet Oe of the most importat applicatios of the DFT is the measuremet of frequecies of periodic sigals (eg., siusoidal sigals),
Practical Spectral Aaysis (cotiue) (from Boaz Porat s book) Frequecy Measuremet Oe of the most importat applicatios of the DFT is the measuremet of frequecies of periodic sigals (eg., siusoidal sigals),
7 Sequences of real numbers
 40 7 Sequeces of real umbers 7. Defiitios ad examples Defiitio 7... A sequece of real umbers is a real fuctio whose domai is the set N of atural umbers. Let s : N R be a sequece. The the values of s are
40 7 Sequeces of real umbers 7. Defiitios ad examples Defiitio 7... A sequece of real umbers is a real fuctio whose domai is the set N of atural umbers. Let s : N R be a sequece. The the values of s are
Chapter 4. Fourier Series
 Chapter 4. Fourier Series At this poit we are ready to ow cosider the caoical equatios. Cosider, for eample the heat equatio u t = u, < (4.) subject to u(, ) = si, u(, t) = u(, t) =. (4.) Here,
Chapter 4. Fourier Series At this poit we are ready to ow cosider the caoical equatios. Cosider, for eample the heat equatio u t = u, < (4.) subject to u(, ) = si, u(, t) = u(, t) =. (4.) Here,
The Ratio Test. THEOREM 9.17 Ratio Test Let a n be a series with nonzero terms. 1. a. n converges absolutely if lim. n 1
 460_0906.qxd //04 :8 PM Page 69 SECTION 9.6 The Ratio ad Root Tests 69 Sectio 9.6 EXPLORATION Writig a Series Oe of the followig coditios guaratees that a series will diverge, two coditios guaratee that
460_0906.qxd //04 :8 PM Page 69 SECTION 9.6 The Ratio ad Root Tests 69 Sectio 9.6 EXPLORATION Writig a Series Oe of the followig coditios guaratees that a series will diverge, two coditios guaratee that
Zeros of Polynomials
 Math 160 www.timetodare.com 4.5 4.6 Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered with fidig the solutios of polyomial equatios of ay degree
Math 160 www.timetodare.com 4.5 4.6 Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered with fidig the solutios of polyomial equatios of ay degree
Discrete-Time Signals and Systems. Signals and Systems. Digital Signals. Discrete-Time Signals. Operations on Sequences: Basic Operations
 -6.3 Digital Sigal Processig ad Filterig..8 Discrete-ime Sigals ad Systems ime-domai Represetatios of Discrete-ime Sigals ad Systems ime-domai represetatio of a discrete-time sigal as a sequece of umbers
-6.3 Digital Sigal Processig ad Filterig..8 Discrete-ime Sigals ad Systems ime-domai Represetatios of Discrete-ime Sigals ad Systems ime-domai represetatio of a discrete-time sigal as a sequece of umbers
RADICAL EXPRESSION. If a and x are real numbers and n is a positive integer, then x is an. n th root theorems: Example 1 Simplify
 Example 1 Simplify 1.2A Radical Operatios a) 4 2 b) 16 1 2 c) 16 d) 2 e) 8 1 f) 8 What is the relatioship betwee a, b, c? What is the relatioship betwee d, e, f? If x = a, the x = = th root theorems: RADICAL
Example 1 Simplify 1.2A Radical Operatios a) 4 2 b) 16 1 2 c) 16 d) 2 e) 8 1 f) 8 What is the relatioship betwee a, b, c? What is the relatioship betwee d, e, f? If x = a, the x = = th root theorems: RADICAL
Sequences. Notation. Convergence of a Sequence
 Sequeces A sequece is essetially just a list. Defiitio (Sequece of Real Numbers). A sequece of real umbers is a fuctio Z (, ) R for some real umber. Do t let the descriptio of the domai cofuse you; it
Sequeces A sequece is essetially just a list. Defiitio (Sequece of Real Numbers). A sequece of real umbers is a fuctio Z (, ) R for some real umber. Do t let the descriptio of the domai cofuse you; it
The picture in figure 1.1 helps us to see that the area represents the distance traveled. Figure 1: Area represents distance travelled
 1 Lecture : Area Area ad distace traveled Approximatig area by rectagles Summatio The area uder a parabola 1.1 Area ad distace Suppose we have the followig iformatio about the velocity of a particle, how
1 Lecture : Area Area ad distace traveled Approximatig area by rectagles Summatio The area uder a parabola 1.1 Area ad distace Suppose we have the followig iformatio about the velocity of a particle, how
Review of Discrete-time Signals. ELEC 635 Prof. Siripong Potisuk
 Review of Discrete-time Sigals ELEC 635 Prof. Siripog Potisuk 1 Discrete-time Sigals Discrete-time, cotiuous-valued amplitude (sampled-data sigal) Discrete-time, discrete-valued amplitude (digital sigal)
Review of Discrete-time Sigals ELEC 635 Prof. Siripog Potisuk 1 Discrete-time Sigals Discrete-time, cotiuous-valued amplitude (sampled-data sigal) Discrete-time, discrete-valued amplitude (digital sigal)
Chapter 7: Numerical Series
 Chapter 7: Numerical Series Chapter 7 Overview: Sequeces ad Numerical Series I most texts, the topic of sequeces ad series appears, at first, to be a side topic. There are almost o derivatives or itegrals
Chapter 7: Numerical Series Chapter 7 Overview: Sequeces ad Numerical Series I most texts, the topic of sequeces ad series appears, at first, to be a side topic. There are almost o derivatives or itegrals
Lecture Chapter 6: Convergence of Random Sequences
 ECE5: Aalysis of Radom Sigals Fall 6 Lecture Chapter 6: Covergece of Radom Sequeces Dr Salim El Rouayheb Scribe: Abhay Ashutosh Doel, Qibo Zhag, Peiwe Tia, Pegzhe Wag, Lu Liu Radom sequece Defiitio A ifiite
ECE5: Aalysis of Radom Sigals Fall 6 Lecture Chapter 6: Covergece of Radom Sequeces Dr Salim El Rouayheb Scribe: Abhay Ashutosh Doel, Qibo Zhag, Peiwe Tia, Pegzhe Wag, Lu Liu Radom sequece Defiitio A ifiite
CS / MCS 401 Homework 3 grader solutions
 CS / MCS 401 Homework 3 grader solutios assigmet due July 6, 016 writte by Jāis Lazovskis maximum poits: 33 Some questios from CLRS. Questios marked with a asterisk were ot graded. 1 Use the defiitio of
CS / MCS 401 Homework 3 grader solutios assigmet due July 6, 016 writte by Jāis Lazovskis maximum poits: 33 Some questios from CLRS. Questios marked with a asterisk were ot graded. 1 Use the defiitio of
An alternating series is a series where the signs alternate. Generally (but not always) there is a factor of the form ( 1) n + 1
 there is a factor of the form ( 1) n + 1") Calculus II - Problem Solvig Drill 20: Alteratig Series, Ratio ad Root Tests Questio No. of 0 Istructios: () Read the problem ad aswer choices carefully (2) Work the problems o paper as eeded (3) Pick
Calculus II - Problem Solvig Drill 20: Alteratig Series, Ratio ad Root Tests Questio No. of 0 Istructios: () Read the problem ad aswer choices carefully (2) Work the problems o paper as eeded (3) Pick
Digital signal processing: Lecture 5. z-transformation - I. Produced by Qiangfu Zhao (Since 1995), All rights reserved
, All rights reserved") Digital sigal processig: Lecture 5 -trasformatio - I Produced by Qiagfu Zhao Sice 995, All rights reserved DSP-Lec5/ Review of last lecture Fourier trasform & iverse Fourier trasform: Time domai & Frequecy
Digital sigal processig: Lecture 5 -trasformatio - I Produced by Qiagfu Zhao Sice 995, All rights reserved DSP-Lec5/ Review of last lecture Fourier trasform & iverse Fourier trasform: Time domai & Frequecy
Kinetics of Complex Reactions
 Kietics of Complex Reactios by Flick Colema Departmet of Chemistry Wellesley College Wellesley MA 28 wcolema@wellesley.edu Copyright Flick Colema 996. All rights reserved. You are welcome to use this documet
Kietics of Complex Reactios by Flick Colema Departmet of Chemistry Wellesley College Wellesley MA 28 wcolema@wellesley.edu Copyright Flick Colema 996. All rights reserved. You are welcome to use this documet
A sequence of numbers is a function whose domain is the positive integers. We can see that the sequence
 Sequeces A sequece of umbers is a fuctio whose domai is the positive itegers. We ca see that the sequece,, 2, 2, 3, 3,... is a fuctio from the positive itegers whe we write the first sequece elemet as
Sequeces A sequece of umbers is a fuctio whose domai is the positive itegers. We ca see that the sequece,, 2, 2, 3, 3,... is a fuctio from the positive itegers whe we write the first sequece elemet as
ENGI Series Page 6-01
 ENGI 3425 6 Series Page 6-01 6. Series Cotets: 6.01 Sequeces; geeral term, limits, covergece 6.02 Series; summatio otatio, covergece, divergece test 6.03 Stadard Series; telescopig series, geometric series,
ENGI 3425 6 Series Page 6-01 6. Series Cotets: 6.01 Sequeces; geeral term, limits, covergece 6.02 Series; summatio otatio, covergece, divergece test 6.03 Stadard Series; telescopig series, geometric series,
SNAP Centre Workshop. Basic Algebraic Manipulation
 SNAP Cetre Workshop Basic Algebraic Maipulatio 8 Simplifyig Algebraic Expressios Whe a expressio is writte i the most compact maer possible, it is cosidered to be simplified. Not Simplified: x(x + 4x)
SNAP Cetre Workshop Basic Algebraic Maipulatio 8 Simplifyig Algebraic Expressios Whe a expressio is writte i the most compact maer possible, it is cosidered to be simplified. Not Simplified: x(x + 4x)
( 1) n (4x + 1) n. n=0
 n (4x + 1) n. n=0") Problem 1 (10.6, #). Fid the radius of covergece for the series: ( 1) (4x + 1). For what values of x does the series coverge absolutely, ad for what values of x does the series coverge coditioally? Solutio.
Problem 1 (10.6, #). Fid the radius of covergece for the series: ( 1) (4x + 1). For what values of x does the series coverge absolutely, ad for what values of x does the series coverge coditioally? Solutio.
x a x a Lecture 2 Series (See Chapter 1 in Boas)
") Lecture Series (See Chapter i Boas) A basic ad very powerful (if pedestria, recall we are lazy AD smart) way to solve ay differetial (or itegral) equatio is via a series expasio of the correspodig solutio
Lecture Series (See Chapter i Boas) A basic ad very powerful (if pedestria, recall we are lazy AD smart) way to solve ay differetial (or itegral) equatio is via a series expasio of the correspodig solutio
62. Power series Definition 16. (Power series) Given a sequence {c n }, the series. c n x n = c 0 + c 1 x + c 2 x 2 + c 3 x 3 +
 Given a sequence {c n }, the series. c n x n = c 0 + c 1 x + c 2 x 2 + c 3 x 3 +") 62. Power series Defiitio 16. (Power series) Give a sequece {c }, the series c x = c 0 + c 1 x + c 2 x 2 + c 3 x 3 + is called a power series i the variable x. The umbers c are called the coefficiets of
62. Power series Defiitio 16. (Power series) Give a sequece {c }, the series c x = c 0 + c 1 x + c 2 x 2 + c 3 x 3 + is called a power series i the variable x. The umbers c are called the coefficiets of
Recurrence Relations
 Recurrece Relatios Aalysis of recursive algorithms, such as: it factorial (it ) { if (==0) retur ; else retur ( * factorial(-)); } Let t be the umber of multiplicatios eeded to calculate factorial(). The
Recurrece Relatios Aalysis of recursive algorithms, such as: it factorial (it ) { if (==0) retur ; else retur ( * factorial(-)); } Let t be the umber of multiplicatios eeded to calculate factorial(). The
Frequency Domain Filtering
 Frequecy Domai Filterig Raga Rodrigo October 19, 2010 Outlie Cotets 1 Itroductio 1 2 Fourier Represetatio of Fiite-Duratio Sequeces: The Discrete Fourier Trasform 1 3 The 2-D Discrete Fourier Trasform
Frequecy Domai Filterig Raga Rodrigo October 19, 2010 Outlie Cotets 1 Itroductio 1 2 Fourier Represetatio of Fiite-Duratio Sequeces: The Discrete Fourier Trasform 1 3 The 2-D Discrete Fourier Trasform
Alternating Series. 1 n 0 2 n n THEOREM 9.14 Alternating Series Test Let a n > 0. The alternating series. 1 n a n.
 0_0905.qxd //0 :7 PM Page SECTION 9.5 Alteratig Series Sectio 9.5 Alteratig Series Use the Alteratig Series Test to determie whether a ifiite series coverges. Use the Alteratig Series Remaider to approximate
0_0905.qxd //0 :7 PM Page SECTION 9.5 Alteratig Series Sectio 9.5 Alteratig Series Use the Alteratig Series Test to determie whether a ifiite series coverges. Use the Alteratig Series Remaider to approximate
NUMERICAL METHODS FOR SOLVING EQUATIONS
 Mathematics Revisio Guides Numerical Methods for Solvig Equatios Page 1 of 11 M.K. HOME TUITION Mathematics Revisio Guides Level: GCSE Higher Tier NUMERICAL METHODS FOR SOLVING EQUATIONS Versio:. Date:
Mathematics Revisio Guides Numerical Methods for Solvig Equatios Page 1 of 11 M.K. HOME TUITION Mathematics Revisio Guides Level: GCSE Higher Tier NUMERICAL METHODS FOR SOLVING EQUATIONS Versio:. Date:
Chapter 3. z-transform
 Chapter 3 -Trasform 3.0 Itroductio The -Trasform has the same role as that played by the Laplace Trasform i the cotiuous-time theorem. It is a liear operator that is useful for aalyig LTI systems such
Chapter 3 -Trasform 3.0 Itroductio The -Trasform has the same role as that played by the Laplace Trasform i the cotiuous-time theorem. It is a liear operator that is useful for aalyig LTI systems such
5.1. Periodic Signals: A signal f(t) is periodic iff for some T 0 > 0,
 is periodic iff for some T 0 > 0,") 5. Periodic Sigals: A sigal f(t) is periodic iff for some >, f () t = f ( t + ) i t he smallest value that satisfies the above coditios is called the period of f(t). Cosider a sigal examied over to 5 secods
5. Periodic Sigals: A sigal f(t) is periodic iff for some >, f () t = f ( t + ) i t he smallest value that satisfies the above coditios is called the period of f(t). Cosider a sigal examied over to 5 secods
3.2 Properties of Division 3.3 Zeros of Polynomials 3.4 Complex and Rational Zeros of Polynomials
 Math 60 www.timetodare.com 3. Properties of Divisio 3.3 Zeros of Polyomials 3.4 Complex ad Ratioal Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered
Math 60 www.timetodare.com 3. Properties of Divisio 3.3 Zeros of Polyomials 3.4 Complex ad Ratioal Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered
Analog and Digital Signals. Introduction to Digital Signal Processing. Discrete-time Sinusoids. Analog and Digital Signals
 Itroductio to Digital Sigal Processig Chapter : Itroductio Aalog ad Digital Sigals aalog = cotiuous-time cotiuous amplitude digital = discrete-time discrete amplitude cotiuous amplitude discrete amplitude
Itroductio to Digital Sigal Processig Chapter : Itroductio Aalog ad Digital Sigals aalog = cotiuous-time cotiuous amplitude digital = discrete-time discrete amplitude cotiuous amplitude discrete amplitude
Appendix: The Laplace Transform
 Appedix: The Laplace Trasform The Laplace trasform is a powerful method that ca be used to solve differetial equatio, ad other mathematical problems. Its stregth lies i the fact that it allows the trasformatio
Appedix: The Laplace Trasform The Laplace trasform is a powerful method that ca be used to solve differetial equatio, ad other mathematical problems. Its stregth lies i the fact that it allows the trasformatio
4.3 Growth Rates of Solutions to Recurrences
 4.3. GROWTH RATES OF SOLUTIONS TO RECURRENCES 81 4.3 Growth Rates of Solutios to Recurreces 4.3.1 Divide ad Coquer Algorithms Oe of the most basic ad powerful algorithmic techiques is divide ad coquer.
4.3. GROWTH RATES OF SOLUTIONS TO RECURRENCES 81 4.3 Growth Rates of Solutios to Recurreces 4.3.1 Divide ad Coquer Algorithms Oe of the most basic ad powerful algorithmic techiques is divide ad coquer.
Math 113 Exam 4 Practice
 Math Exam 4 Practice Exam 4 will cover.-.. This sheet has three sectios. The first sectio will remid you about techiques ad formulas that you should kow. The secod gives a umber of practice questios for
Math Exam 4 Practice Exam 4 will cover.-.. This sheet has three sectios. The first sectio will remid you about techiques ad formulas that you should kow. The secod gives a umber of practice questios for
APPENDIX F Complex Numbers
 APPENDIX F Complex Numbers Operatios with Complex Numbers Complex Solutios of Quadratic Equatios Polar Form of a Complex Number Powers ad Roots of Complex Numbers Operatios with Complex Numbers Some equatios
APPENDIX F Complex Numbers Operatios with Complex Numbers Complex Solutios of Quadratic Equatios Polar Form of a Complex Number Powers ad Roots of Complex Numbers Operatios with Complex Numbers Some equatios
Taylor Series (BC Only)
") Studet Study Sessio Taylor Series (BC Oly) Taylor series provide a way to fid a polyomial look-alike to a o-polyomial fuctio. This is doe by a specific formula show below (which should be memorized): Taylor
Studet Study Sessio Taylor Series (BC Oly) Taylor series provide a way to fid a polyomial look-alike to a o-polyomial fuctio. This is doe by a specific formula show below (which should be memorized): Taylor
Exam. Notes: A single A4 sheet of paper (double sided; hand-written or computer typed)
") Exam February 8th, 8 Sigals & Systems (5-575-) Prof. R. D Adrea Exam Exam Duratio: 5 Mi Number of Problems: 5 Number of Poits: 5 Permitted aids: Importat: Notes: A sigle A sheet of paper (double sided;
Exam February 8th, 8 Sigals & Systems (5-575-) Prof. R. D Adrea Exam Exam Duratio: 5 Mi Number of Problems: 5 Number of Poits: 5 Permitted aids: Importat: Notes: A sigle A sheet of paper (double sided;
Section 1.4. Power Series
 Sectio.4. Power Series De itio. The fuctio de ed by f (x) (x a) () c 0 + c (x a) + c 2 (x a) 2 + c (x a) + ::: is called a power series cetered at x a with coe ciet sequece f g :The domai of this fuctio
Sectio.4. Power Series De itio. The fuctio de ed by f (x) (x a) () c 0 + c (x a) + c 2 (x a) 2 + c (x a) + ::: is called a power series cetered at x a with coe ciet sequece f g :The domai of this fuctio
Discrete-Time Signals and Systems. Discrete-Time Signals and Systems. Signal Symmetry. Elementary Discrete-Time Signals.
 Discrete-ime Sigals ad Systems Discrete-ime Sigals ad Systems Dr. Deepa Kudur Uiversity of oroto Referece: Sectios. -.5 of Joh G. Proakis ad Dimitris G. Maolakis, Digital Sigal Processig: Priciples, Algorithms,
Discrete-ime Sigals ad Systems Discrete-ime Sigals ad Systems Dr. Deepa Kudur Uiversity of oroto Referece: Sectios. -.5 of Joh G. Proakis ad Dimitris G. Maolakis, Digital Sigal Processig: Priciples, Algorithms,
Mathematical Induction
 Mathematical Iductio Itroductio Mathematical iductio, or just iductio, is a proof techique. Suppose that for every atural umber, P() is a statemet. We wish to show that all statemets P() are true. I a
Mathematical Iductio Itroductio Mathematical iductio, or just iductio, is a proof techique. Suppose that for every atural umber, P() is a statemet. We wish to show that all statemets P() are true. I a
September 2012 C1 Note. C1 Notes (Edexcel) Copyright - For AS, A2 notes and IGCSE / GCSE worksheets 1
 Copyright - For AS, A2 notes and IGCSE / GCSE worksheets 1") September 0 s (Edecel) Copyright www.pgmaths.co.uk - For AS, A otes ad IGCSE / GCSE worksheets September 0 Copyright www.pgmaths.co.uk - For AS, A otes ad IGCSE / GCSE worksheets September 0 Copyright
September 0 s (Edecel) Copyright www.pgmaths.co.uk - For AS, A otes ad IGCSE / GCSE worksheets September 0 Copyright www.pgmaths.co.uk - For AS, A otes ad IGCSE / GCSE worksheets September 0 Copyright
Physics 116A Solutions to Homework Set #1 Winter Boas, problem Use equation 1.8 to find a fraction describing
 Physics 6A Solutios to Homework Set # Witer 0. Boas, problem. 8 Use equatio.8 to fid a fractio describig 0.694444444... Start with the formula S = a, ad otice that we ca remove ay umber of r fiite decimals
Physics 6A Solutios to Homework Set # Witer 0. Boas, problem. 8 Use equatio.8 to fid a fractio describig 0.694444444... Start with the formula S = a, ad otice that we ca remove ay umber of r fiite decimals