Definition of z-transform.
|
|
|
- Frederick Price
- 6 years ago
- Views:
Transcription
1 - Trasforms Frequecy domai represetatios of discretetime sigals ad LTI discrete-time systems are made possible with the use of DTFT. However ot all discrete-time sigals e.g. uit step sequece are guarateed to have DTFT because of covergece coditio. As a result for these cases we are ot able to use such frequecy domai characteriatio.
2 Defiitio of -Trasform. DTFT is give by - Ge ω Certai fuctio of g[] will ot allow the above summatio to coverge. Therefore we eed to fid a way of overcomig this o - covergece. Let us modified the sigal g[] to g[]r DTFT of g[]r g[ ] e - ω is Ge. ω g[ ] r - e ω g[ ] re ω. Lettig re ω, therefore G g[ ]... Eq.6.
3 where re Regio of Covergece. Aother way lookig at the trasform G - trasform is the DTFT of modified sigal ω. g[]r g[ ] By choosig the right value of r, we ca make the summatio above to coverge. The values of r that make this covergece possible is kow as Regio of Covergece ROC. ROC are circles or aular rigs i the - plae. -..-
4 Poit i a Complex - plae Imagiary Axis re ω r ω Real Axis Uit Circle
5 Aular rig i a Complex - plae Imagiary Axis r ω re ω ROC Real Axis Uit Circle
6 Example 6. -Trasform of Causal What is X X Expoetial Sequece. Usig eq. 6., the - trasform of x[ ] G The above summatio is a sum of - α oly if The - trasform here is a algebraic expressio but must be accompay with the covergece or else it is -, x[] g[ ] α µ [ ] α ot valid. <. α geometric series coditio of ROC here is outside a circleaular regio > α - α µ [ ]? 0.
7 Amplitude r Time idex α Amplitude x[ ] α µ [ ]. µ [ ] Time idex
8 Imagiary Axis ROC α < Real Axis Uit Circle
9 If α, x[] DTFT of 0 X e oly if Uit step sequece The uit step sequece is hece it DTFT does But - trasform of - α µ [ ] ω - DTFT does - µ [ ] µ [ ]: - µ [ ] e ot coverge. - < i.e. >.ROC., µ [ ]. ω ot exit ot absolutely summable,
10 Imagiary Axis ROC Real Axis Uit Circle Sice uit circle is ot i ROC, DTFT of uit step does ot coverge.
11 Example 6. -Trasform of Aticausal Expoetial Sequece. What is the - trasform of x[] α µ [ ]?{left had sequece} Usig eq. 6., X α - α, m α x[ ] m m 0 α provided that α α µ [ ] m <. m 0 α m α. - α X - α α α The ed algebraic expressio is exactly the same as i example 6., the oly that is differet here is ROC, α <. ROC is iside a circleaular regio < α - provided that α <.
12 Imagiary Axis α < ROC Real Axis Uit Circle
13 -Trasform of Fiite Sequeces G If g[]is fiite e.g.g[] [,-,3,-,0,3,7]. G ROC for this G is the etire - plae except for If g[]is fiite e.g.g[] [-,0,3,7]. G ROC for this G is the etire - plae except for If g[]is fiite e.g.g[] [,-,3,-] G g[ ] g[ ] g[ ] g[ ] ROC for this G is the etire - plae except for ad 0. 3.
14 Ratioal -trasforms - plae. 0origi of poles at N M - there are additiol M, N If - plae. 0origi of eros at N - M there are additiol M, N If. i.e. obtaied by takig H H o - plae. are N poles of 0. i.e. obtaied by takig H o - plae. H are M eros of Factorig above equatios : polyomials i : ratio of Alterate Represetatio as : ad D i P two polyomials Ratio of < > Π Π Π Π l l l N l l M l M N l N l l M l N N N N N M M M M M M N N N N N M M M M Eq d p d p H Eq d d d d d p p p p p H Eq d d d d d p p p p p D P H λ ξ λ ξ λ ξ
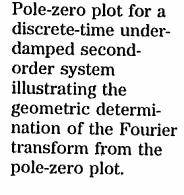
15 Examples of Ratioal -Trasforms - trasform of µ [ ]: µ - havig a ero at 0, ad a pole at. H -, for >.ROC Cougate poles at 0.4 ± 0.698, - Cougate eros at. ±.
16
17
18
19
20
21
22
23
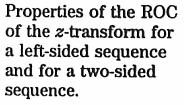
24 ROC for right-sided sequece
25
26
27
28 Methods of computig the Iverse -trasform Usig Cauchy s Residue Theorem Table look-up Partial Fractio Expasio Power Series Expasio or Log Divisio.
29 Iverse -Trasform via Table Example 6.. H H α µ [ ] h[] Look-Up 0.5, > From Table 6.: - ZT 0.5 α α µ [ ], > α..
30 Iverse -Trasform via Partial Fractio Expasio Example H This is a improper fuctio sice M 3 > N. Perform log divisio first by reversig order of both polyomial s - 0.3/ / 0. H to get at the proper fuctio. H
31 Cotiue Example Now from the proper fuctio ad b ± b 4ac quadratic formula, a - 4 ± 6 0 Roots of deomiator of proper fuctio ± Performiig the partial fractio expasio for the proper fuctio :
32 Cotiue Example 6.3 ] [ ] [ ] [.5 ] [ 3.5 h[]., ] [ ad ZT µ µ δ δ α α α µ α >
33
34 Iverse -Trasform Via Power Series Expasio/Log Divisio... 4] [ 0.4 3] [ 0.4 ] [ 0.5 ] [.6 ] [ ] [ H H Example h δ δ δ δ δ
35 Properties of -Trasform Liearity Time Shiftig Scalig i the -domai Time Reversal Time Expasio Cougatio Covolutio Differetiatio i the -domai The iitial-value Theorem.
36 -T Property associated with Liearity T x [ ] X with ROC deoted by R x T [ ] X with ROC deoted by R ax [ ] bx I is LT [ ] ax bx the symbol for itersect with. with ROC cotaiig R I R.
37 -T Properties cotiued T x[ ] X, with ROC R, Time Shiftig : - the x[ 0 T ] 0 X, with ROC R,except for possible additio or deletio of the origi or ifiity. Scalig i the - domai : - T the 0x[ ] X 0, with ROC 0 R. Time Reversal: - T the x[ ] X, with ROC. R Time Expasio : - x k [ ] x[ ] if is a multiple of k k, 0.if is ot a multiple of k. the x k T [ ] X k, with ROC R k Cougatio : - the x * T [ ] X * *, with ROC R.
38 -T Property associated with Covolutio x T [ ] X with ROC deoted by R x T [ ] X with ROC deoted by R x I [ ]* x is T [ ] X X the symbol for itersect with. with ROC cotaiig R I R.
39 T Properties cotiued T x[ ] X, with ROC R, Differetiatio i the - Domai : - T dx the x[ ], with ROC d R. Iitial - value theorem : If x[] 0 for < 0, the x[0] Lim X. -
40 Aalysis & Characteriatio of LTI systems usig -Trasforms. If x[] where, y [ ] is eigefuctio of H is eigevalue of H., LTI system LTI system, x[] X h[] H y[]x[]*h[] YX.H H is kow as System Fuctio or Trasfer Fuctio Frequecy respose H with e ω uit circle i ROC
41 Causality. A LTI system is causal if : - Its impulse respose h[] 0 for < 0 ie. right -sided. or i other words : - ROC of its system fuctio H is the exterior of the circle icludig ifiity. A discrete - time LTI system with ratioal system fuctio H is causal if ad oly if : - a the ROC is the exterior of a circle outside the outermost pole; ad b with H expressed as a ratio of polyomials i, the order of the umerator caot be greater tha the order of the deomiator.
42 Stability. A LTI system is stable if ad oly if:- Its Impulse respose h[] is absolutely summable. Or Fourier Trasform of h[] coverges. Or the ROC of its system fuctio H icludes the uit circle, For causal LTI system, all poles of H must be i the uit circle,
43 Example 6.4 Iverse -trasform, Causality & Stability. H Determie all the possible impulse resposes h[] for the give H above. Associate each oe of Usig Partial - Fractio Expasio : - H.0, Poles are 0. ad -0.6 the above impulse reposes with the ROC, stability, ad causality ROC: - Right had impulse repose h[] µ [ ] µ [ ]. Causal & Stable. ROC : - R.H & L.H impulse respose h[].750. ROC3 : - Left had impulse respose h[] µ [ ] µ [ ] µ [ ]. Not Causal & Not Stable. µ [ ]. Not Causal & Not Stable. ROC :- >0.6 ROC :- 0.< <0.6 ROC 3:- <0. ROC ROC 3 ROC
44 System Fuctio for Itercoectios of LTI Systems H H.H H H H H H H H
45 System Fuctio for Itercoectios of LTI Systems X H Y H Y X H H H H
46 Block Diagram of Causal LTI systems described by Differece Equatios ad Ratioal System Fuctios. Example0.8 A Causal LTIsystem with system fuctio : - H - x[] 4 Y X Y { } X 4 Takig the iverse - trasform of y[ ] 4 y[ ] x[ ] or y[ ] the above equatio, x[ ] 4 4 y[ ] - y[-] y[]
The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j
![The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j](/thumbs/82/85448534.jpg "The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j") The -Trasform 7. Itroductio Geeralie the complex siusoidal represetatio offered by DTFT to a represetatio of complex expoetial sigals. Obtai more geeral characteristics for discrete-time LTI systems. 7.
The -Trasform 7. Itroductio Geeralie the complex siusoidal represetatio offered by DTFT to a represetatio of complex expoetial sigals. Obtai more geeral characteristics for discrete-time LTI systems. 7.
Chapter 7: The z-transform. Chih-Wei Liu
 Chapter 7: The -Trasform Chih-Wei Liu Outlie Itroductio The -Trasform Properties of the Regio of Covergece Properties of the -Trasform Iversio of the -Trasform The Trasfer Fuctio Causality ad Stability
Chapter 7: The -Trasform Chih-Wei Liu Outlie Itroductio The -Trasform Properties of the Regio of Covergece Properties of the -Trasform Iversio of the -Trasform The Trasfer Fuctio Causality ad Stability
Z - Transform. It offers the techniques for digital filter design and frequency analysis of digital signals.
 Z - Trasform The -trasform is a very importat tool i describig ad aalyig digital systems. It offers the techiques for digital filter desig ad frequecy aalysis of digital sigals. Defiitio of -trasform:
Z - Trasform The -trasform is a very importat tool i describig ad aalyig digital systems. It offers the techiques for digital filter desig ad frequecy aalysis of digital sigals. Defiitio of -trasform:
Chapter 7 z-transform
 Chapter 7 -Trasform Itroductio Trasform Uilateral Trasform Properties Uilateral Trasform Iversio of Uilateral Trasform Determiig the Frequecy Respose from Poles ad Zeros Itroductio Role i Discrete-Time
Chapter 7 -Trasform Itroductio Trasform Uilateral Trasform Properties Uilateral Trasform Iversio of Uilateral Trasform Determiig the Frequecy Respose from Poles ad Zeros Itroductio Role i Discrete-Time
Digital Signal Processing
 Digital Sigal Processig Z-trasform dftwave -Trasform Backgroud-Defiitio - Fourier trasform j ω j ω e x e extracts the essece of x but is limited i the sese that it ca hadle stable systems oly. jω e coverges
Digital Sigal Processig Z-trasform dftwave -Trasform Backgroud-Defiitio - Fourier trasform j ω j ω e x e extracts the essece of x but is limited i the sese that it ca hadle stable systems oly. jω e coverges
M2.The Z-Transform and its Properties
 M2.The Z-Trasform ad its Properties Readig Material: Page 94-126 of chapter 3 3/22/2011 I. Discrete-Time Sigals ad Systems 1 What did we talk about i MM1? MM1 - Discrete-Time Sigal ad System 3/22/2011
M2.The Z-Trasform ad its Properties Readig Material: Page 94-126 of chapter 3 3/22/2011 I. Discrete-Time Sigals ad Systems 1 What did we talk about i MM1? MM1 - Discrete-Time Sigal ad System 3/22/2011
from definition we note that for sequences which are zero for n < 0, X[z] involves only negative powers of z.
![from definition we note that for sequences which are zero for n < 0, X[z] involves only negative powers of z.](/thumbs/82/85448167.jpg "from definition we note that for sequences which are zero for n < 0, X[z] involves only negative powers of z.") We ote that for the past four examples we have expressed the -trasform both as a ratio of polyomials i ad as a ratio of polyomials i -. The questio is how does oe kow which oe to use? [] X ] from defiitio
We ote that for the past four examples we have expressed the -trasform both as a ratio of polyomials i ad as a ratio of polyomials i -. The questio is how does oe kow which oe to use? [] X ] from defiitio
Generalizing the DTFT. The z Transform. Complex Exponential Excitation. The Transfer Function. Systems Described by Difference Equations
 Geeraliig the DTFT The Trasform M. J. Roberts - All Rights Reserved. Edited by Dr. Robert Akl 1 The forward DTFT is defied by X e jω = x e jω i which = Ω is discrete-time radia frequecy, a real variable.
Geeraliig the DTFT The Trasform M. J. Roberts - All Rights Reserved. Edited by Dr. Robert Akl 1 The forward DTFT is defied by X e jω = x e jω i which = Ω is discrete-time radia frequecy, a real variable.
3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,
![3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,](/thumbs/82/85448051.jpg "3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,") 3. Z Trasform Referece: Etire Chapter 3 of text. Recall that the Fourier trasform (FT) of a DT sigal x [ ] is ω ( ) [ ] X e = j jω k = xe I order for the FT to exist i the fiite magitude sese, S = x [
3. Z Trasform Referece: Etire Chapter 3 of text. Recall that the Fourier trasform (FT) of a DT sigal x [ ] is ω ( ) [ ] X e = j jω k = xe I order for the FT to exist i the fiite magitude sese, S = x [
Chapter 3. z-transform
 Chapter 3 -Trasform 3.0 Itroductio The -Trasform has the same role as that played by the Laplace Trasform i the cotiuous-time theorem. It is a liear operator that is useful for aalyig LTI systems such
Chapter 3 -Trasform 3.0 Itroductio The -Trasform has the same role as that played by the Laplace Trasform i the cotiuous-time theorem. It is a liear operator that is useful for aalyig LTI systems such
The Z-Transform. Content and Figures are from Discrete-Time Signal Processing, 2e by Oppenheim, Shafer, and Buck, Prentice Hall Inc.
 The Z-Trasform Cotet ad Figures are from Discrete-Time Sigal Processig, e by Oppeheim, Shafer, ad Buck, 999- Pretice Hall Ic. The -Trasform Couterpart of the Laplace trasform for discrete-time sigals Geeraliatio
The Z-Trasform Cotet ad Figures are from Discrete-Time Sigal Processig, e by Oppeheim, Shafer, ad Buck, 999- Pretice Hall Ic. The -Trasform Couterpart of the Laplace trasform for discrete-time sigals Geeraliatio
COMM 602: Digital Signal Processing
 COMM 60: Digital Sigal Processig Lecture 4 -Properties of LTIS Usig Z-Trasform -Iverse Z-Trasform Properties of LTIS Usig Z-Trasform Properties of LTIS Usig Z-Trasform -ve +ve Properties of LTIS Usig Z-Trasform
COMM 60: Digital Sigal Processig Lecture 4 -Properties of LTIS Usig Z-Trasform -Iverse Z-Trasform Properties of LTIS Usig Z-Trasform Properties of LTIS Usig Z-Trasform -ve +ve Properties of LTIS Usig Z-Trasform
EE Midterm Test 1 - Solutions
 EE35 - Midterm Test - Solutios Total Poits: 5+ 6 Bous Poits Time: hour. ( poits) Cosider the parallel itercoectio of the two causal systems, System ad System 2, show below. System x[] + y[] System 2 The
EE35 - Midterm Test - Solutios Total Poits: 5+ 6 Bous Poits Time: hour. ( poits) Cosider the parallel itercoectio of the two causal systems, System ad System 2, show below. System x[] + y[] System 2 The
6.003 Homework #3 Solutions
 6.00 Homework # Solutios Problems. Complex umbers a. Evaluate the real ad imagiary parts of j j. π/ Real part = Imagiary part = 0 e Euler s formula says that j = e jπ/, so jπ/ j π/ j j = e = e. Thus the
6.00 Homework # Solutios Problems. Complex umbers a. Evaluate the real ad imagiary parts of j j. π/ Real part = Imagiary part = 0 e Euler s formula says that j = e jπ/, so jπ/ j π/ j j = e = e. Thus the
Chapter 4 : Laplace Transform
 4. Itroductio Laplace trasform is a alterative to solve the differetial equatio by the complex frequecy domai ( s = σ + jω), istead of the usual time domai. The DE ca be easily trasformed ito a algebraic
4. Itroductio Laplace trasform is a alterative to solve the differetial equatio by the complex frequecy domai ( s = σ + jω), istead of the usual time domai. The DE ca be easily trasformed ito a algebraic
The Z-Transform. (t-t 0 ) Figure 1: Simplified graph of an impulse function. For an impulse, it can be shown that (1)
 Figure 1: Simplified graph of an impulse function. For an impulse, it can be shown that (1)") The Z-Trasform Sampled Data The geeralied fuctio (t) (also kow as the impulse fuctio) is useful i the defiitio ad aalysis of sampled-data sigals. Figure below shows a simplified graph of a impulse. (t-t
The Z-Trasform Sampled Data The geeralied fuctio (t) (also kow as the impulse fuctio) is useful i the defiitio ad aalysis of sampled-data sigals. Figure below shows a simplified graph of a impulse. (t-t
Lecture 3. Digital Signal Processing. Chapter 3. z-transforms. Mikael Swartling Nedelko Grbic Bengt Mandersson. rev. 2016
 Lecture 3 Digital Sigal Processig Chapter 3 z-trasforms Mikael Swartlig Nedelko Grbic Begt Madersso rev. 06 Departmet of Electrical ad Iformatio Techology Lud Uiversity z-trasforms We defie the z-trasform
Lecture 3 Digital Sigal Processig Chapter 3 z-trasforms Mikael Swartlig Nedelko Grbic Begt Madersso rev. 06 Departmet of Electrical ad Iformatio Techology Lud Uiversity z-trasforms We defie the z-trasform
The z transform is the discrete-time counterpart of the Laplace transform. Other description: see page 553, textbook.
 The -Trasform 7. Itroductio The trasform is the discrete-time couterpart of the Laplace trasform. Other descriptio: see page 553, textbook. 7. The -trasform Derivatio of the -trasform: x[] re jω LTI system,
The -Trasform 7. Itroductio The trasform is the discrete-time couterpart of the Laplace trasform. Other descriptio: see page 553, textbook. 7. The -trasform Derivatio of the -trasform: x[] re jω LTI system,
The z-transform can be used to obtain compact transform-domain representations of signals and systems. It
 3 4 5 6 7 8 9 10 CHAPTER 3 11 THE Z-TRANSFORM 31 INTRODUCTION The z-trasform ca be used to obtai compact trasform-domai represetatios of sigals ad systems It provides ituitio particularly i LTI system
3 4 5 6 7 8 9 10 CHAPTER 3 11 THE Z-TRANSFORM 31 INTRODUCTION The z-trasform ca be used to obtai compact trasform-domai represetatios of sigals ad systems It provides ituitio particularly i LTI system
The z Transform. The Discrete LTI System Response to a Complex Exponential
 The Trasform The trasform geeralies the Discrete-time Forier Trasform for the etire complex plae. For the complex variable is sed the otatio: jω x+ j y r e ; x, y Ω arg r x + y {} The Discrete LTI System
The Trasform The trasform geeralies the Discrete-time Forier Trasform for the etire complex plae. For the complex variable is sed the otatio: jω x+ j y r e ; x, y Ω arg r x + y {} The Discrete LTI System
University of California at Berkeley College of Engineering Department of Electrical Engineering and Computer Sciences
 A Uiversity of Califoria at Berkeley College of Egieerig Departmet of Electrical Egieerig ad Computer Scieces U N I V E R S T H E I T Y O F LE T TH E R E B E LI G H T C A L I F O R N 8 6 8 I A EECS : Sigals
A Uiversity of Califoria at Berkeley College of Egieerig Departmet of Electrical Egieerig ad Computer Scieces U N I V E R S T H E I T Y O F LE T TH E R E B E LI G H T C A L I F O R N 8 6 8 I A EECS : Sigals
Web Appendix O - Derivations of the Properties of the z Transform
 M. J. Roberts - 2/18/07 Web Appedix O - Derivatios of the Properties of the z Trasform O.1 Liearity Let z = x + y where ad are costats. The ( z)= ( x + y )z = x z + y z ad the liearity property is O.2
M. J. Roberts - 2/18/07 Web Appedix O - Derivatios of the Properties of the z Trasform O.1 Liearity Let z = x + y where ad are costats. The ( z)= ( x + y )z = x z + y z ad the liearity property is O.2
Digital signal processing: Lecture 5. z-transformation - I. Produced by Qiangfu Zhao (Since 1995), All rights reserved
, All rights reserved") Digital sigal processig: Lecture 5 -trasformatio - I Produced by Qiagfu Zhao Sice 995, All rights reserved DSP-Lec5/ Review of last lecture Fourier trasform & iverse Fourier trasform: Time domai & Frequecy
Digital sigal processig: Lecture 5 -trasformatio - I Produced by Qiagfu Zhao Sice 995, All rights reserved DSP-Lec5/ Review of last lecture Fourier trasform & iverse Fourier trasform: Time domai & Frequecy
Solutions of Chapter 5 Part 1/2
 Page 1 of 8 Solutios of Chapter 5 Part 1/2 Problem 5.1-1 Usig the defiitio, compute the -trasform of x[] ( 1) (u[] u[ 8]). Sketch the poles ad eros of X[] i the plae. Solutio: Accordig to the defiitio,
Page 1 of 8 Solutios of Chapter 5 Part 1/2 Problem 5.1-1 Usig the defiitio, compute the -trasform of x[] ( 1) (u[] u[ 8]). Sketch the poles ad eros of X[] i the plae. Solutio: Accordig to the defiitio,
GATE ELECTRONICS & COMMUNICATION
 Eighth Editio GATE ELECTRONICS & COMMUNICATION Sigals ad Systems Vol 7 of 0 RK Kaodia Ashish Murolia NODIA & COMPANY GATE Electroics & Commuicatio Vol 7, 8e Sigals ad Systems RK Kaodia & Ashish Murolia
Eighth Editio GATE ELECTRONICS & COMMUNICATION Sigals ad Systems Vol 7 of 0 RK Kaodia Ashish Murolia NODIA & COMPANY GATE Electroics & Commuicatio Vol 7, 8e Sigals ad Systems RK Kaodia & Ashish Murolia
Exponential Moving Average Pieter P
 Expoetial Movig Average Pieter P Differece equatio The Differece equatio of a expoetial movig average lter is very simple: y[] x[] + (1 )y[ 1] I this equatio, y[] is the curret output, y[ 1] is the previous
Expoetial Movig Average Pieter P Differece equatio The Differece equatio of a expoetial movig average lter is very simple: y[] x[] + (1 )y[ 1] I this equatio, y[] is the curret output, y[ 1] is the previous
Complex Numbers Solutions
 Complex Numbers Solutios Joseph Zoller February 7, 06 Solutios. (009 AIME I Problem ) There is a complex umber with imagiary part 64 ad a positive iteger such that Fid. [Solutio: 697] 4i + + 4i. 4i 4i
Complex Numbers Solutios Joseph Zoller February 7, 06 Solutios. (009 AIME I Problem ) There is a complex umber with imagiary part 64 ad a positive iteger such that Fid. [Solutio: 697] 4i + + 4i. 4i 4i
Ch3 Discrete Time Fourier Transform
 Ch3 Discrete Time Fourier Trasform 3. Show that the DTFT of [] is give by ( k). e k 3. Determie the DTFT of the two sided sigal y [ ],. 3.3 Determie the DTFT of the causal sequece x[ ] A cos( 0 ) [ ],
Ch3 Discrete Time Fourier Trasform 3. Show that the DTFT of [] is give by ( k). e k 3. Determie the DTFT of the two sided sigal y [ ],. 3.3 Determie the DTFT of the causal sequece x[ ] A cos( 0 ) [ ],
Introduction to Signals and Systems, Part V: Lecture Summary
 EEL33: Discrete-Time Sigals ad Systems Itroductio to Sigals ad Systems, Part V: Lecture Summary Itroductio to Sigals ad Systems, Part V: Lecture Summary So far we have oly looked at examples of o-recursive
EEL33: Discrete-Time Sigals ad Systems Itroductio to Sigals ad Systems, Part V: Lecture Summary Itroductio to Sigals ad Systems, Part V: Lecture Summary So far we have oly looked at examples of o-recursive
EECE 301 Signals & Systems
 EECE 301 Sigals & Systems Prof. Mark Fowler Note Set #8 D-T Covolutio: The Tool for Fidig the Zero-State Respose Readig Assigmet: Sectio 2.1-2.2 of Kame ad Heck 1/14 Course Flow Diagram The arrows here
EECE 301 Sigals & Systems Prof. Mark Fowler Note Set #8 D-T Covolutio: The Tool for Fidig the Zero-State Respose Readig Assigmet: Sectio 2.1-2.2 of Kame ad Heck 1/14 Course Flow Diagram The arrows here
Signal Processing in Mechatronics. Lecture 3, Convolution, Fourier Series and Fourier Transform
 Sigal Processig i Mechatroics Summer semester, 1 Lecture 3, Covolutio, Fourier Series ad Fourier rasform Dr. Zhu K.P. AIS, UM 1 1. Covolutio Covolutio Descriptio of LI Systems he mai premise is that the
Sigal Processig i Mechatroics Summer semester, 1 Lecture 3, Covolutio, Fourier Series ad Fourier rasform Dr. Zhu K.P. AIS, UM 1 1. Covolutio Covolutio Descriptio of LI Systems he mai premise is that the
Appendix: The Laplace Transform
 Appedix: The Laplace Trasform The Laplace trasform is a powerful method that ca be used to solve differetial equatio, ad other mathematical problems. Its stregth lies i the fact that it allows the trasformatio
Appedix: The Laplace Trasform The Laplace trasform is a powerful method that ca be used to solve differetial equatio, ad other mathematical problems. Its stregth lies i the fact that it allows the trasformatio
ENGI Series Page 6-01
 ENGI 3425 6 Series Page 6-01 6. Series Cotets: 6.01 Sequeces; geeral term, limits, covergece 6.02 Series; summatio otatio, covergece, divergece test 6.03 Stadard Series; telescopig series, geometric series,
ENGI 3425 6 Series Page 6-01 6. Series Cotets: 6.01 Sequeces; geeral term, limits, covergece 6.02 Series; summatio otatio, covergece, divergece test 6.03 Stadard Series; telescopig series, geometric series,
Question1 Multiple choices (circle the most appropriate one):
:") Philadelphia Uiversity Studet Name: Faculty of Egieerig Studet Number: Dept. of Computer Egieerig Fial Exam, First Semester: 2014/2015 Course Title: Digital Sigal Aalysis ad Processig Date: 01/02/2015
Philadelphia Uiversity Studet Name: Faculty of Egieerig Studet Number: Dept. of Computer Egieerig Fial Exam, First Semester: 2014/2015 Course Title: Digital Sigal Aalysis ad Processig Date: 01/02/2015
Signals & Systems Chapter3
 Sigals & Systems Chapter3 1.2 Discrete-Time (D-T) Sigals Electroic systems do most of the processig of a sigal usig a computer. A computer ca t directly process a C-T sigal but istead eeds a stream of
Sigals & Systems Chapter3 1.2 Discrete-Time (D-T) Sigals Electroic systems do most of the processig of a sigal usig a computer. A computer ca t directly process a C-T sigal but istead eeds a stream of
Module 2: z-transform and Discrete Systems
 Module : -Trasform ad Discrete Systems Prof. Eliathamy Amikairajah ajah Dr. Tharmarajah Thiruvara School of Electrical Egieerig & Telecommuicatios The Uiversity of New South Wales Australia The -Trasform
Module : -Trasform ad Discrete Systems Prof. Eliathamy Amikairajah ajah Dr. Tharmarajah Thiruvara School of Electrical Egieerig & Telecommuicatios The Uiversity of New South Wales Australia The -Trasform
CEMTool Tutorial. The z-transform
 CEMTool Tutorial The -Trasform Overview This tutorial is part of the CEMWARE series. Each tutorial i this series will teach you a specific topic of commo applicatios by explaiig theoretical cocepts ad
CEMTool Tutorial The -Trasform Overview This tutorial is part of the CEMWARE series. Each tutorial i this series will teach you a specific topic of commo applicatios by explaiig theoretical cocepts ad
Module 18 Discrete Time Signals and Z-Transforms Objective: Introduction : Description: Discrete Time Signal representation
 Module 8 Discrete Time Sigals ad Z-Trasforms Objective:To uderstad represetig discrete time sigals, apply z trasform for aalyzigdiscrete time sigals ad to uderstad the relatio to Fourier trasform Itroductio
Module 8 Discrete Time Sigals ad Z-Trasforms Objective:To uderstad represetig discrete time sigals, apply z trasform for aalyzigdiscrete time sigals ad to uderstad the relatio to Fourier trasform Itroductio
x[0] x[1] x[2] Figure 2.1 Graphical representation of a discrete-time signal.
![x[0] x[1] x[2] Figure 2.1 Graphical representation of a discrete-time signal.](/thumbs/83/88911754.jpg "x[0] x[1] x[2] Figure 2.1 Graphical representation of a discrete-time signal.") x[ ] x[ ] x[] x[] x[] x[] 9 8 7 6 5 4 3 3 4 5 6 7 8 9 Figure. Graphical represetatio of a discrete-time sigal. From Discrete-Time Sigal Processig, e by Oppeheim, Schafer, ad Buck 999- Pretice Hall, Ic.
x[ ] x[ ] x[] x[] x[] x[] 9 8 7 6 5 4 3 3 4 5 6 7 8 9 Figure. Graphical represetatio of a discrete-time sigal. From Discrete-Time Sigal Processig, e by Oppeheim, Schafer, ad Buck 999- Pretice Hall, Ic.
EE / EEE SAMPLE STUDY MATERIAL. GATE, IES & PSUs Signal System. Electrical Engineering. Postal Correspondence Course
 Sigal-EE Postal Correspodece Course 1 SAMPLE STUDY MATERIAL Electrical Egieerig EE / EEE Postal Correspodece Course GATE, IES & PSUs Sigal System Sigal-EE Postal Correspodece Course CONTENTS 1. SIGNAL
Sigal-EE Postal Correspodece Course 1 SAMPLE STUDY MATERIAL Electrical Egieerig EE / EEE Postal Correspodece Course GATE, IES & PSUs Sigal System Sigal-EE Postal Correspodece Course CONTENTS 1. SIGNAL
Frequency Response of FIR Filters
 EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we itroduce the idea of the frequecy respose of LTI systems, ad focus specifically o the frequecy respose of FIR filters.. Steady-state
EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we itroduce the idea of the frequecy respose of LTI systems, ad focus specifically o the frequecy respose of FIR filters.. Steady-state
Solutions. Number of Problems: 4. None. Use only the prepared sheets for your solutions. Additional paper is available from the supervisors.
 Quiz November 4th, 23 Sigals & Systems (5-575-) P. Reist & Prof. R. D Adrea Solutios Exam Duratio: 4 miutes Number of Problems: 4 Permitted aids: Noe. Use oly the prepared sheets for your solutios. Additioal
Quiz November 4th, 23 Sigals & Systems (5-575-) P. Reist & Prof. R. D Adrea Solutios Exam Duratio: 4 miutes Number of Problems: 4 Permitted aids: Noe. Use oly the prepared sheets for your solutios. Additioal
Quiz. Use either the RATIO or ROOT TEST to determine whether the series is convergent or not.
 Quiz. Use either the RATIO or ROOT TEST to determie whether the series is coverget or ot. e .6 POWER SERIES Defiitio. A power series i about is a series of the form c 0 c a c a... c a... a 0 c a where
Quiz. Use either the RATIO or ROOT TEST to determie whether the series is coverget or ot. e .6 POWER SERIES Defiitio. A power series i about is a series of the form c 0 c a c a... c a... a 0 c a where
(A sequence also can be thought of as the list of function values attained for a function f :ℵ X, where f (n) = x n for n 1.) x 1 x N +k x N +4 x 3
 = x n for n 1.) x 1 x N +k x N +4 x 3") MATH 337 Sequeces Dr. Neal, WKU Let X be a metric space with distace fuctio d. We shall defie the geeral cocept of sequece ad limit i a metric space, the apply the results i particular to some special
MATH 337 Sequeces Dr. Neal, WKU Let X be a metric space with distace fuctio d. We shall defie the geeral cocept of sequece ad limit i a metric space, the apply the results i particular to some special
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science. Fall Problem Set 11 Solutions.
 Massachusetts Istitute of Techology Departmet of Electrical Egieerig ad Computer Sciece Issued: Thursday, December 8, 005 6.341: Discrete-Time Sigal Processig Fall 005 Problem Set 11 Solutios Problem 11.1
Massachusetts Istitute of Techology Departmet of Electrical Egieerig ad Computer Sciece Issued: Thursday, December 8, 005 6.341: Discrete-Time Sigal Processig Fall 005 Problem Set 11 Solutios Problem 11.1
Physics 116A Solutions to Homework Set #1 Winter Boas, problem Use equation 1.8 to find a fraction describing
 Physics 6A Solutios to Homework Set # Witer 0. Boas, problem. 8 Use equatio.8 to fid a fractio describig 0.694444444... Start with the formula S = a, ad otice that we ca remove ay umber of r fiite decimals
Physics 6A Solutios to Homework Set # Witer 0. Boas, problem. 8 Use equatio.8 to fid a fractio describig 0.694444444... Start with the formula S = a, ad otice that we ca remove ay umber of r fiite decimals
Solutions to Tutorial 5 (Week 6)
") The Uiversity of Sydey School of Mathematics ad Statistics Solutios to Tutorial 5 (Wee 6 MATH2962: Real ad Complex Aalysis (Advaced Semester, 207 Web Page: http://www.maths.usyd.edu.au/u/ug/im/math2962/
The Uiversity of Sydey School of Mathematics ad Statistics Solutios to Tutorial 5 (Wee 6 MATH2962: Real ad Complex Aalysis (Advaced Semester, 207 Web Page: http://www.maths.usyd.edu.au/u/ug/im/math2962/
Signals and Systems. Problem Set: From Continuous-Time to Discrete-Time
 Sigals ad Systems Problem Set: From Cotiuous-Time to Discrete-Time Updated: October 5, 2017 Problem Set Problem 1 - Liearity ad Time-Ivariace Cosider the followig systems ad determie whether liearity ad
Sigals ad Systems Problem Set: From Cotiuous-Time to Discrete-Time Updated: October 5, 2017 Problem Set Problem 1 - Liearity ad Time-Ivariace Cosider the followig systems ad determie whether liearity ad
PRELIM PROBLEM SOLUTIONS
 PRELIM PROBLEM SOLUTIONS THE GRAD STUDENTS + KEN Cotets. Complex Aalysis Practice Problems 2. 2. Real Aalysis Practice Problems 2. 4 3. Algebra Practice Problems 2. 8. Complex Aalysis Practice Problems
PRELIM PROBLEM SOLUTIONS THE GRAD STUDENTS + KEN Cotets. Complex Aalysis Practice Problems 2. 2. Real Aalysis Practice Problems 2. 4 3. Algebra Practice Problems 2. 8. Complex Aalysis Practice Problems
APPM 4360/5360 Exam #2 Solutions Spring 2015
 APPM 436/536 Exam # Solutios Sprig 5 O the frot of your bluebook, write your ame ad make a gradig table. You re allowed oe sheet (letter-sized, frot ad back of otes. You are ot allowed to use textbooks,
APPM 436/536 Exam # Solutios Sprig 5 O the frot of your bluebook, write your ame ad make a gradig table. You re allowed oe sheet (letter-sized, frot ad back of otes. You are ot allowed to use textbooks,
Sequences. Notation. Convergence of a Sequence
 Sequeces A sequece is essetially just a list. Defiitio (Sequece of Real Numbers). A sequece of real umbers is a fuctio Z (, ) R for some real umber. Do t let the descriptio of the domai cofuse you; it
Sequeces A sequece is essetially just a list. Defiitio (Sequece of Real Numbers). A sequece of real umbers is a fuctio Z (, ) R for some real umber. Do t let the descriptio of the domai cofuse you; it
Fall 2011, EE123 Digital Signal Processing
 Lecture 5 Miki Lustig, UCB September 14, 211 Miki Lustig, UCB Motivatios for Discrete Fourier Trasform Sampled represetatio i time ad frequecy umerical Fourier aalysis requires a Fourier represetatio that
Lecture 5 Miki Lustig, UCB September 14, 211 Miki Lustig, UCB Motivatios for Discrete Fourier Trasform Sampled represetatio i time ad frequecy umerical Fourier aalysis requires a Fourier represetatio that
Describing Function: An Approximate Analysis Method
 Describig Fuctio: A Approximate Aalysis Method his chapter presets a method for approximately aalyzig oliear dyamical systems A closed-form aalytical solutio of a oliear dyamical system (eg, a oliear differetial
Describig Fuctio: A Approximate Aalysis Method his chapter presets a method for approximately aalyzig oliear dyamical systems A closed-form aalytical solutio of a oliear dyamical system (eg, a oliear differetial
Solutions to Homework 1
 Solutios to Homework MATH 36. Describe geometrically the sets of poits z i the complex plae defied by the followig relatios /z = z () Re(az + b) >, where a, b (2) Im(z) = c, with c (3) () = = z z = z 2.
Solutios to Homework MATH 36. Describe geometrically the sets of poits z i the complex plae defied by the followig relatios /z = z () Re(az + b) >, where a, b (2) Im(z) = c, with c (3) () = = z z = z 2.
Infinite Sequences and Series
 Chapter 6 Ifiite Sequeces ad Series 6.1 Ifiite Sequeces 6.1.1 Elemetary Cocepts Simply speakig, a sequece is a ordered list of umbers writte: {a 1, a 2, a 3,...a, a +1,...} where the elemets a i represet
Chapter 6 Ifiite Sequeces ad Series 6.1 Ifiite Sequeces 6.1.1 Elemetary Cocepts Simply speakig, a sequece is a ordered list of umbers writte: {a 1, a 2, a 3,...a, a +1,...} where the elemets a i represet
Rouché s Theorem 7/13/2011
 7/13/211 Rouché s Theorem Prelimiary Iformatio Complex Aalysis I complex aalysis, variables have a real part (x) ad a imagiary part (iy), where i = 1 z = x + iy Fuctios of complex variables also have a
7/13/211 Rouché s Theorem Prelimiary Iformatio Complex Aalysis I complex aalysis, variables have a real part (x) ad a imagiary part (iy), where i = 1 z = x + iy Fuctios of complex variables also have a
Series: Infinite Sums
 Series: Ifiite Sums Series are a way to mae sese of certai types of ifiitely log sums. We will eed to be able to do this if we are to attai our goal of approximatig trascedetal fuctios by usig ifiite degree
Series: Ifiite Sums Series are a way to mae sese of certai types of ifiitely log sums. We will eed to be able to do this if we are to attai our goal of approximatig trascedetal fuctios by usig ifiite degree
Frequency-domain Characteristics of Discrete-time LTI Systems
 requecy-domi Chrcteristics of Discrete-time LTI Systems Prof. Siripog Potisuk LTI System descriptio Previous bsis fuctio: uit smple or DT impulse The iput sequece is represeted s lier combitio of shifted
requecy-domi Chrcteristics of Discrete-time LTI Systems Prof. Siripog Potisuk LTI System descriptio Previous bsis fuctio: uit smple or DT impulse The iput sequece is represeted s lier combitio of shifted
Fall 2013 MTH431/531 Real analysis Section Notes
 Fall 013 MTH431/531 Real aalysis Sectio 8.1-8. Notes Yi Su 013.11.1 1. Defiitio of uiform covergece. We look at a sequece of fuctios f (x) ad study the coverget property. Notice we have two parameters
Fall 013 MTH431/531 Real aalysis Sectio 8.1-8. Notes Yi Su 013.11.1 1. Defiitio of uiform covergece. We look at a sequece of fuctios f (x) ad study the coverget property. Notice we have two parameters
Chapter 10: The Z-Transform Adapted from: Lecture notes from MIT, Binghamton University Dr. Hamid R. Rabiee Fall 2013
 Sigls & Systems Chpter 0: The Z-Trsform Adpted from: Lecture otes from MIT, Bighmto Uiversity Dr. Hmid R. Rbiee Fll 03 Lecture 5 Chpter 0 Lecture 6 Chpter 0 Outlie Itroductio to the -Trsform Properties
Sigls & Systems Chpter 0: The Z-Trsform Adpted from: Lecture otes from MIT, Bighmto Uiversity Dr. Hmid R. Rbiee Fll 03 Lecture 5 Chpter 0 Lecture 6 Chpter 0 Outlie Itroductio to the -Trsform Properties
SOLUTIONS TO EXAM 3. Solution: Note that this defines two convergent geometric series with respective radii r 1 = 2/5 < 1 and r 2 = 1/5 < 1.
 SOLUTIONS TO EXAM 3 Problem Fid the sum of the followig series 2 + ( ) 5 5 2 5 3 25 2 2 This series diverges Solutio: Note that this defies two coverget geometric series with respective radii r 2/5 < ad
SOLUTIONS TO EXAM 3 Problem Fid the sum of the followig series 2 + ( ) 5 5 2 5 3 25 2 2 This series diverges Solutio: Note that this defies two coverget geometric series with respective radii r 2/5 < ad
ECE-S352 Introduction to Digital Signal Processing Lecture 3A Direct Solution of Difference Equations
 ECE-S352 Itroductio to Digital Sigal Processig Lecture 3A Direct Solutio of Differece Equatios Discrete Time Systems Described by Differece Equatios Uit impulse (sample) respose h() of a DT system allows
ECE-S352 Itroductio to Digital Sigal Processig Lecture 3A Direct Solutio of Differece Equatios Discrete Time Systems Described by Differece Equatios Uit impulse (sample) respose h() of a DT system allows
Discrete-Time Systems, LTI Systems, and Discrete-Time Convolution
 EEL5: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we begi our mathematical treatmet of discrete-time s. As show i Figure, a discrete-time operates or trasforms some iput sequece x [
EEL5: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we begi our mathematical treatmet of discrete-time s. As show i Figure, a discrete-time operates or trasforms some iput sequece x [
3 Gauss map and continued fractions
 ICTP, Trieste, July 08 Gauss map ad cotiued fractios I this lecture we will itroduce the Gauss map, which is very importat for its coectio with cotiued fractios i umber theory. The Gauss map G : [0, ]
ICTP, Trieste, July 08 Gauss map ad cotiued fractios I this lecture we will itroduce the Gauss map, which is very importat for its coectio with cotiued fractios i umber theory. The Gauss map G : [0, ]
Math 210A Homework 1
 Math 0A Homework Edward Burkard Exercise. a) State the defiitio of a aalytic fuctio. b) What are the relatioships betwee aalytic fuctios ad the Cauchy-Riema equatios? Solutio. a) A fuctio f : G C is called
Math 0A Homework Edward Burkard Exercise. a) State the defiitio of a aalytic fuctio. b) What are the relatioships betwee aalytic fuctios ad the Cauchy-Riema equatios? Solutio. a) A fuctio f : G C is called
Lesson 10: Limits and Continuity
 www.scimsacademy.com Lesso 10: Limits ad Cotiuity SCIMS Academy 1 Limit of a fuctio The cocept of limit of a fuctio is cetral to all other cocepts i calculus (like cotiuity, derivative, defiite itegrals
www.scimsacademy.com Lesso 10: Limits ad Cotiuity SCIMS Academy 1 Limit of a fuctio The cocept of limit of a fuctio is cetral to all other cocepts i calculus (like cotiuity, derivative, defiite itegrals
FIR Filter Design: Part II
 EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we cosider how we might go about desigig FIR filters with arbitrary frequecy resposes, through compositio of multiple sigle-peak
EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we cosider how we might go about desigig FIR filters with arbitrary frequecy resposes, through compositio of multiple sigle-peak
DIGITAL SIGNAL PROCESSING LECTURE 5
 DIGITAL SIGNAL PROCESSING LECTURE 5 Fll K8-5 th Semester Thir Muhmmd tmuhmmd_7@yhoo.com Cotet d Figures re from Discrete-Time Sigl Processig, e by Oppeheim, Shfer, d Buck, 999- Pretice Hll Ic. The -Trsform
DIGITAL SIGNAL PROCESSING LECTURE 5 Fll K8-5 th Semester Thir Muhmmd tmuhmmd_7@yhoo.com Cotet d Figures re from Discrete-Time Sigl Processig, e by Oppeheim, Shfer, d Buck, 999- Pretice Hll Ic. The -Trsform
f(x) dx as we do. 2x dx x also diverges. Solution: We compute 2x dx lim
 dx as we do. 2x dx x also diverges. Solution: We compute 2x dx lim") Math 3, Sectio 2. (25 poits) Why we defie f(x) dx as we do. (a) Show that the improper itegral diverges. Hece the improper itegral x 2 + x 2 + b also diverges. Solutio: We compute x 2 + = lim b x 2 + =
Math 3, Sectio 2. (25 poits) Why we defie f(x) dx as we do. (a) Show that the improper itegral diverges. Hece the improper itegral x 2 + x 2 + b also diverges. Solutio: We compute x 2 + = lim b x 2 + =
Chapter 10: The Z-Transform Adapted from: Lecture notes from MIT, Binghamton University Hamid R. Rabiee Arman Sepehr Fall 2010
 Sigls & Systems Chpter 0: The Z-Trsform Adpted from: Lecture otes from MIT, Bighmto Uiversity Hmid R. Riee Arm Sepehr Fll 00 Lecture 5 Chpter 0 Outlie Itroductio to the -Trsform Properties of the ROC of
Sigls & Systems Chpter 0: The Z-Trsform Adpted from: Lecture otes from MIT, Bighmto Uiversity Hmid R. Riee Arm Sepehr Fll 00 Lecture 5 Chpter 0 Outlie Itroductio to the -Trsform Properties of the ROC of
Time-Domain Representations of LTI Systems
 2.1 Itroductio Objectives: 1. Impulse resposes of LTI systems 2. Liear costat-coefficiets differetial or differece equatios of LTI systems 3. Bloc diagram represetatios of LTI systems 4. State-variable
2.1 Itroductio Objectives: 1. Impulse resposes of LTI systems 2. Liear costat-coefficiets differetial or differece equatios of LTI systems 3. Bloc diagram represetatios of LTI systems 4. State-variable
Dupuy Complex Analysis Spring 2016 Homework 02
 Dupuy Complex Aalysis Sprig 206 Homework 02. (CUNY, Fall 2005) Let D be the closed uit disc. Let g be a sequece of aalytic fuctios covergig uiformly to f o D. (a) Show that g coverges. Solutio We have
Dupuy Complex Aalysis Sprig 206 Homework 02. (CUNY, Fall 2005) Let D be the closed uit disc. Let g be a sequece of aalytic fuctios covergig uiformly to f o D. (a) Show that g coverges. Solutio We have
Chapter 8. DFT : The Discrete Fourier Transform
 Chapter 8 DFT : The Discrete Fourier Trasform Roots of Uity Defiitio: A th root of uity is a complex umber x such that x The th roots of uity are: ω, ω,, ω - where ω e π /. Proof: (ω ) (e π / ) (e π )
Chapter 8 DFT : The Discrete Fourier Trasform Roots of Uity Defiitio: A th root of uity is a complex umber x such that x The th roots of uity are: ω, ω,, ω - where ω e π /. Proof: (ω ) (e π / ) (e π )
ECE 308 Discrete-Time Signals and Systems
 ECE 38-5 ECE 38 Discrete-Time Sigals ad Systems Z. Aliyazicioglu Electrical ad Computer Egieerig Departmet Cal Poly Pomoa ECE 38-5 1 Additio, Multiplicatio, ad Scalig of Sequeces Amplitude Scalig: (A Costat
ECE 38-5 ECE 38 Discrete-Time Sigals ad Systems Z. Aliyazicioglu Electrical ad Computer Egieerig Departmet Cal Poly Pomoa ECE 38-5 1 Additio, Multiplicatio, ad Scalig of Sequeces Amplitude Scalig: (A Costat
ELEG3503 Introduction to Digital Signal Processing
 ELEG3503 Itroductio to Digital Sigal Processig 1 Itroductio 2 Basics of Sigals ad Systems 3 Fourier aalysis 4 Samplig 5 Liear time-ivariat (LTI) systems 6 z-trasform 7 System Aalysis 8 System Realizatio
ELEG3503 Itroductio to Digital Sigal Processig 1 Itroductio 2 Basics of Sigals ad Systems 3 Fourier aalysis 4 Samplig 5 Liear time-ivariat (LTI) systems 6 z-trasform 7 System Aalysis 8 System Realizatio
AP Calculus Chapter 9: Infinite Series
 AP Calculus Chapter 9: Ifiite Series 9. Sequeces a, a 2, a 3, a 4, a 5,... Sequece: A fuctio whose domai is the set of positive itegers = 2 3 4 a = a a 2 a 3 a 4 terms of the sequece Begi with the patter
AP Calculus Chapter 9: Ifiite Series 9. Sequeces a, a 2, a 3, a 4, a 5,... Sequece: A fuctio whose domai is the set of positive itegers = 2 3 4 a = a a 2 a 3 a 4 terms of the sequece Begi with the patter
9.3 The INTEGRAL TEST; p-series
 Lecture 9.3 & 9.4 Math 0B Nguye of 6 Istructor s Versio 9.3 The INTEGRAL TEST; p-series I this ad the followig sectio, you will study several covergece tests that apply to series with positive terms. Note
Lecture 9.3 & 9.4 Math 0B Nguye of 6 Istructor s Versio 9.3 The INTEGRAL TEST; p-series I this ad the followig sectio, you will study several covergece tests that apply to series with positive terms. Note
6.3 Testing Series With Positive Terms
 6.3. TESTING SERIES WITH POSITIVE TERMS 307 6.3 Testig Series With Positive Terms 6.3. Review of what is kow up to ow I theory, testig a series a i for covergece amouts to fidig the i= sequece of partial
6.3. TESTING SERIES WITH POSITIVE TERMS 307 6.3 Testig Series With Positive Terms 6.3. Review of what is kow up to ow I theory, testig a series a i for covergece amouts to fidig the i= sequece of partial
In this section, we show how to use the integral test to decide whether a series
 Itegral Test Itegral Test Example Itegral Test Example p-series Compariso Test Example Example 2 Example 3 Example 4 Example 5 Exa Itegral Test I this sectio, we show how to use the itegral test to decide
Itegral Test Itegral Test Example Itegral Test Example p-series Compariso Test Example Example 2 Example 3 Example 4 Example 5 Exa Itegral Test I this sectio, we show how to use the itegral test to decide
Analog and Digital Signals. Introduction to Digital Signal Processing. Discrete-time Sinusoids. Analog and Digital Signals
 Itroductio to Digital Sigal Processig Chapter : Itroductio Aalog ad Digital Sigals aalog = cotiuous-time cotiuous amplitude digital = discrete-time discrete amplitude cotiuous amplitude discrete amplitude
Itroductio to Digital Sigal Processig Chapter : Itroductio Aalog ad Digital Sigals aalog = cotiuous-time cotiuous amplitude digital = discrete-time discrete amplitude cotiuous amplitude discrete amplitude
DEPARTMENT OF ELECTRICAL &ELECTRONICS ENGINEERING SIGNALS AND SYSTEMS. Assoc. Prof. Dr. Burak Kelleci. Spring 2018
 DEPARTMENT OF ELECTRICAL &ELECTRONICS ENGINEERING SIGNALS AND SYSTEMS Assoc. Prof. Dr. Bur Kelleci Sprig 8 OUTLINE The Z-Trsform The Regio of covergece for the Z-trsform The Iverse Z-Trsform Geometric
DEPARTMENT OF ELECTRICAL &ELECTRONICS ENGINEERING SIGNALS AND SYSTEMS Assoc. Prof. Dr. Bur Kelleci Sprig 8 OUTLINE The Z-Trsform The Regio of covergece for the Z-trsform The Iverse Z-Trsform Geometric
Finite-length Discrete Transforms. Chapter 5, Sections
 Fiite-legth Discrete Trasforms Chapter 5, Sectios 5.2-50 5.0 Dr. Iyad djafar Outlie The Discrete Fourier Trasform (DFT) Matrix Represetatio of DFT Fiite-legth Sequeces Circular Covolutio DFT Symmetry Properties
Fiite-legth Discrete Trasforms Chapter 5, Sectios 5.2-50 5.0 Dr. Iyad djafar Outlie The Discrete Fourier Trasform (DFT) Matrix Represetatio of DFT Fiite-legth Sequeces Circular Covolutio DFT Symmetry Properties
Curve Sketching Handout #5 Topic Interpretation Rational Functions
 Curve Sketchig Hadout #5 Topic Iterpretatio Ratioal Fuctios A ratioal fuctio is a fuctio f that is a quotiet of two polyomials. I other words, p ( ) ( ) f is a ratioal fuctio if p ( ) ad q ( ) are polyomials
Curve Sketchig Hadout #5 Topic Iterpretatio Ratioal Fuctios A ratioal fuctio is a fuctio f that is a quotiet of two polyomials. I other words, p ( ) ( ) f is a ratioal fuctio if p ( ) ad q ( ) are polyomials
A sequence of numbers is a function whose domain is the positive integers. We can see that the sequence
 Sequeces A sequece of umbers is a fuctio whose domai is the positive itegers. We ca see that the sequece,, 2, 2, 3, 3,... is a fuctio from the positive itegers whe we write the first sequece elemet as
Sequeces A sequece of umbers is a fuctio whose domai is the positive itegers. We ca see that the sequece,, 2, 2, 3, 3,... is a fuctio from the positive itegers whe we write the first sequece elemet as
Sequences A sequence of numbers is a function whose domain is the positive integers. We can see that the sequence
 Sequeces A sequece of umbers is a fuctio whose domai is the positive itegers. We ca see that the sequece 1, 1, 2, 2, 3, 3,... is a fuctio from the positive itegers whe we write the first sequece elemet
Sequeces A sequece of umbers is a fuctio whose domai is the positive itegers. We ca see that the sequece 1, 1, 2, 2, 3, 3,... is a fuctio from the positive itegers whe we write the first sequece elemet
MAT 271 Project: Partial Fractions for certain rational functions
 MAT 7 Project: Partial Fractios for certai ratioal fuctios Prerequisite kowledge: partial fractios from MAT 7, a very good commad of factorig ad complex umbers from Precalculus. To complete this project,
MAT 7 Project: Partial Fractios for certai ratioal fuctios Prerequisite kowledge: partial fractios from MAT 7, a very good commad of factorig ad complex umbers from Precalculus. To complete this project,
Chapter 9: Numerical Differentiation
 178 Chapter 9: Numerical Differetiatio Numerical Differetiatio Formulatio of equatios for physical problems ofte ivolve derivatives (rate-of-chage quatities, such as velocity ad acceleratio). Numerical
178 Chapter 9: Numerical Differetiatio Numerical Differetiatio Formulatio of equatios for physical problems ofte ivolve derivatives (rate-of-chage quatities, such as velocity ad acceleratio). Numerical
Chapter 6 Infinite Series
 Chapter 6 Ifiite Series I the previous chapter we cosidered itegrals which were improper i the sese that the iterval of itegratio was ubouded. I this chapter we are goig to discuss a topic which is somewhat
Chapter 6 Ifiite Series I the previous chapter we cosidered itegrals which were improper i the sese that the iterval of itegratio was ubouded. I this chapter we are goig to discuss a topic which is somewhat
CALCULUS BASIC SUMMER REVIEW
 CALCULUS BASIC SUMMER REVIEW NAME rise y y y Slope of a o vertical lie: m ru Poit Slope Equatio: y y m( ) The slope is m ad a poit o your lie is, ). ( y Slope-Itercept Equatio: y m b slope= m y-itercept=
CALCULUS BASIC SUMMER REVIEW NAME rise y y y Slope of a o vertical lie: m ru Poit Slope Equatio: y y m( ) The slope is m ad a poit o your lie is, ). ( y Slope-Itercept Equatio: y m b slope= m y-itercept=
Chapter 2 Systems and Signals
 Chapter 2 Systems ad Sigals 1 Itroductio Discrete-Time Sigals: Sequeces Discrete-Time Systems Properties of Liear Time-Ivariat Systems Liear Costat-Coefficiet Differece Equatios Frequecy-Domai Represetatio
Chapter 2 Systems ad Sigals 1 Itroductio Discrete-Time Sigals: Sequeces Discrete-Time Systems Properties of Liear Time-Ivariat Systems Liear Costat-Coefficiet Differece Equatios Frequecy-Domai Represetatio
REVIEW 1, MATH n=1 is convergent. (b) Determine whether a n is convergent.
 Determine whether a n is convergent.") REVIEW, MATH 00. Let a = +. a) Determie whether the sequece a ) is coverget. b) Determie whether a is coverget.. Determie whether the series is coverget or diverget. If it is coverget, fid its sum. a)
REVIEW, MATH 00. Let a = +. a) Determie whether the sequece a ) is coverget. b) Determie whether a is coverget.. Determie whether the series is coverget or diverget. If it is coverget, fid its sum. a)
Mathematical Description of Discrete-Time Signals. 9/10/16 M. J. Roberts - All Rights Reserved 1
 Mathematical Descriptio of Discrete-Time Sigals 9/10/16 M. J. Roberts - All Rights Reserved 1 Samplig ad Discrete Time Samplig is the acquisitio of the values of a cotiuous-time sigal at discrete poits
Mathematical Descriptio of Discrete-Time Sigals 9/10/16 M. J. Roberts - All Rights Reserved 1 Samplig ad Discrete Time Samplig is the acquisitio of the values of a cotiuous-time sigal at discrete poits
Solutions to Final Exam Review Problems
 . Let f(x) 4+x. Solutios to Fial Exam Review Problems Math 5C, Witer 2007 (a) Fid the Maclauri series for f(x), ad compute its radius of covergece. Solutio. f(x) 4( ( x/4)) ( x/4) ( ) 4 4 + x. Sice the
. Let f(x) 4+x. Solutios to Fial Exam Review Problems Math 5C, Witer 2007 (a) Fid the Maclauri series for f(x), ad compute its radius of covergece. Solutio. f(x) 4( ( x/4)) ( x/4) ( ) 4 4 + x. Sice the
MA Lesson 26 Notes Graphs of Rational Functions (Asymptotes) Limits at infinity
 Limits at infinity") MA 1910 Lesso 6 Notes Graphs of Ratioal Fuctios (Asymptotes) Limits at ifiity Defiitio of a Ratioal Fuctio: If P() ad Q() are both polyomial fuctios, Q() 0, the the fuctio f below is called a Ratioal Fuctio.
MA 1910 Lesso 6 Notes Graphs of Ratioal Fuctios (Asymptotes) Limits at ifiity Defiitio of a Ratioal Fuctio: If P() ad Q() are both polyomial fuctios, Q() 0, the the fuctio f below is called a Ratioal Fuctio.
Solutions to Tutorial 3 (Week 4)
") The Uiversity of Sydey School of Mathematics ad Statistics Solutios to Tutorial Week 4 MATH2962: Real ad Complex Aalysis Advaced Semester 1, 2017 Web Page: http://www.maths.usyd.edu.au/u/ug/im/math2962/
The Uiversity of Sydey School of Mathematics ad Statistics Solutios to Tutorial Week 4 MATH2962: Real ad Complex Aalysis Advaced Semester 1, 2017 Web Page: http://www.maths.usyd.edu.au/u/ug/im/math2962/
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science. BACKGROUND EXAM September 30, 2004.
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Departmet of Electrical Egieerig ad Computer Sciece 6.34 Discrete Time Sigal Processig Fall 24 BACKGROUND EXAM September 3, 24. Full Name: Note: This exam is closed
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Departmet of Electrical Egieerig ad Computer Sciece 6.34 Discrete Time Sigal Processig Fall 24 BACKGROUND EXAM September 3, 24. Full Name: Note: This exam is closed
We are mainly going to be concerned with power series in x, such as. (x)} converges - that is, lims N n
} converges - that is, lims N n") Review of Power Series, Power Series Solutios A power series i x - a is a ifiite series of the form c (x a) =c +c (x a)+(x a) +... We also call this a power series cetered at a. Ex. (x+) is cetered at
Review of Power Series, Power Series Solutios A power series i x - a is a ifiite series of the form c (x a) =c +c (x a)+(x a) +... We also call this a power series cetered at a. Ex. (x+) is cetered at
Math 299 Supplement: Real Analysis Nov 2013
 Math 299 Supplemet: Real Aalysis Nov 203 Algebra Axioms. I Real Aalysis, we work withi the axiomatic system of real umbers: the set R alog with the additio ad multiplicatio operatios +,, ad the iequality
Math 299 Supplemet: Real Aalysis Nov 203 Algebra Axioms. I Real Aalysis, we work withi the axiomatic system of real umbers: the set R alog with the additio ad multiplicatio operatios +,, ad the iequality
Name Date PRECALCULUS SUMMER PACKET
 Name Date PRECALCULUS SUMMER PACKET This packet covers some of the cocepts that you eed to e familiar with i order to e successful i Precalculus. This summer packet is due o the first day of school! Make
Name Date PRECALCULUS SUMMER PACKET This packet covers some of the cocepts that you eed to e familiar with i order to e successful i Precalculus. This summer packet is due o the first day of school! Make
MAT1026 Calculus II Basic Convergence Tests for Series
 MAT026 Calculus II Basic Covergece Tests for Series Egi MERMUT 202.03.08 Dokuz Eylül Uiversity Faculty of Sciece Departmet of Mathematics İzmir/TURKEY Cotets Mootoe Covergece Theorem 2 2 Series of Real
MAT026 Calculus II Basic Covergece Tests for Series Egi MERMUT 202.03.08 Dokuz Eylül Uiversity Faculty of Sciece Departmet of Mathematics İzmir/TURKEY Cotets Mootoe Covergece Theorem 2 2 Series of Real