Chapter 3. z-transform
|
|
|
- Cornelius Stuart Edwards
- 5 years ago
- Views:
Transcription
1 Chapter 3 -Trasform
2 3.0 Itroductio The -Trasform has the same role as that played by the Laplace Trasform i the cotiuous-time theorem. It is a liear operator that is useful for aalyig LTI systems such as for solvig LCCDE s. Types of -Trasform Oe-sided -trasform (Uilateral -T Two-sided -trasform (Bilateral -T I our textbook, -trasform refers to bilateral -trasform uless specified otherwise.
![Motivatio : Limitatio of DTFT For some importat sigals, DTFTs defied above do ot coverge Example x[] a u[] for a > does ot have a DTFT impulse](/docs-images/82/85448367/images/3-0.jpg "respose of a ustable system For certai cases for which DTFT does ot coverge, we ca relax the covergece requiremets, or allow impulses i DTFT 3")
3 Motivatio : Limitatio of DTFT For some importat sigals, DTFTs defied above do ot coverge Example x[] a u[] for a > does ot have a DTFT impulse respose of a ustable system For certai cases for which DTFT does ot coverge, we ca relax the covergece requiremets, or allow impulses i DTFT 3
4 3. -Trasform The Fourier trasform of a sequece x[] is defied as jω ( X e x[ ] e jω The -trasform of a sequece x[] is defied as The -trasform pair is deoted by Z x[ ] X (. Relatioship with Fourier Trasform (if that exists. jω Z{ x[ ] } X( x[ ] ( re is a complex variable X e jω ( e X ( jω. r 4
5 Sice the -trasform is a fuctio of a complex variable, it ca be iterpreted ad described i the complex -pla. re jω X jω ( e r 0 π uit circle -trasform o uit circle <-> Fourier trasform Liear frequecy axis i Fourier trasform Uit circle i -trasform (periodicity i freq. of Fourier trasform If we plot e jω for ω0 to π we get the uit circle 5
6 Existece of -trasform ad DTFT jω Sice re, the -trasform becomes jω jω jω X( re x[ ]( re x[ ] r e Therefore, -trasform is the DTFT of [x[] multiplied with expoetial sequece r ] For certai sigals for which DTFT does ot coverge, i.e. there may exit a value r which makes the -trasform coverge, i.e. the sum i -trasform becomes fiite I { xr [ ] } x [ ] x [ ] r x[ ] < 6
7 Not all sigals have -trasforms Examples havig o -trasform Example: siω [ ] c x π Does't coverge for ay r. It has fiite eergy. DTFT exists oly i a mea square sese. Example: x [ ] cos( ω o Does't coverge for ay r. It does t have eve fiite eergy. But we defie a useful DTFT usig impulse fuctio.
8 Regio of Covergece (ROC The set of values of for which the -trasform coverges is called regio of covergece (ROC, ROC : x[ ] r x[ ] < Sice the covergece of -trasform depeds oly o r, the regio of covergece will cosist of a rig i the -plae cetered about the origi. Outer boudary, R +, is a circle (may exted to ifiity Ier boudary, R -, is a circle (may exted to iclude the origi If ROC icludes the uit circle, Fourier trasform coverges 8
9 Uilateral -Trasform Uilateral -trasform cosiders oly causal part of the sigal, i.e. 0 { } Z x [ ] X ( x [ ] + + For a causal sigal (bilateral -trasfrom (uilateral -trasfrom ROC types should be the etire -plae or outside of a disk, > r, for some r 0, so the iverse trasform is uique Ay causal sigal that grows o faster tha a expoetial sigal r 0, for some r 0 has uilateral -trasform Iformatio about x[] for < 0 is lost Used to solve LCCDE with arbitrary iitial coditios a.k.a. oe-sided -trasform 0 9
10 Zeros ad Poles (Defiitio oly 0
11 Example 3. Right-sided Expoetial Sequece Cosider the sigal x[ ] a u[ ] ROC ( ( X a a Iside the ROC series coverges to By settig a a < a < > a X( Z{ a u[ ] } a Z { a } Pole-ero plot. Regio outside the circle of radius a is the ROC Foe a right-sided sequece, its ROC exteds outside a circle

12 Example 3. Left-sided Expoetial Sequece Cosider the sigal x[ ] a u[ ] X( a u[ ] ROC a a ( a 0 0 a < a < < a Iside the ROC series coverges to a a a ( X Pole-ero plot Regio iside the circle of radius a is the ROC Foe a left-sided sequece, its ROC exteds iside a circle
![Example 3.5 Sum of Two Expoetials Cosider the sequece x [ ] u [ ] u [ ].](/docs-images/82/85448367/images/13-0.jpg "3 3 Z u[ ] + 3 Z u[ ],, > ; 3 X( +, < < + 3 ( / ( /( + /3 < 3 Pole-ero")
13 Example 3.5 Sum of Two Expoetials Cosider the sequece x [ ] u [ ] u [ ]. 3 3 Z u[ ] + 3 Z u[ ],, > ; 3 X( +, < < + 3 ( / ( /( + /3 < 3 Pole-ero plot 3
14 Example 3.6 Fiite-Legth Sequece Cosider the sigal a, 0 N x [ ] 0, otherwise X ( N 0 a N -( a a (ROC : 0 N 0 N ( a N -a a N Pole-ero plot (N6 Specifically, the N roots of the umerator polyomial (eros are at k j(πk / N ae, k 0,,..., N. 4
15 Some Commo -trasform Pairs
16 3. Properties of The ROC of -Trasform The -trasform X( (a power series does ot coverge for all sequece or for all values of. For ay give sequece, the set of values of for which the - trasform coverges is called the regio of covergece (ROC The ROC is a rig or disk cetered at the origi 0 rr < < rl Im Im Im a a Re Re a b Re Right-sided sigal (e.g. causal Left-sided sigal (e.g. ati-causal Two-sided sigal (o-causal 6
17 Importace of ROC The importace of ROC caot be overemphasied. It is part of the - trasform. I specifyig the -trasform X( of a sigal x[], the ROC must be give - otherwise, the iverse -trasform x[] caot be computed uiquely from X(. Example - Cosider the two sequeces a ; < 0 x[ ] 0; 0 X ( for < a a 0; < 0 y [ ] a ; 0 Y( for > a a Here it is importat to uderstad that X( Y(. The ROC s of these two trasforms do ot eve itersect. Not equal! X ( + ROC uique x[ ] 7
18 Some importat properties of ROC iclude: DTFT of a sequece x[] coverges uiformly if ad oly if the ROC of the -trasform of x[] icludes the uit circle The ROC caot cotai ay poles : o poles i ROC The ROC must be a coected regio
19 Example of ROC Cosider the discrete sigal It has a two-sided -trasform provided that both sums coverge. Thus covergece of this Z- trasform requires that, < 0 ; 0 ; ( b a x 0 0 ( a b a b a b Z X ad < < a b }. : { ROC so b a < < Im Re R + R 9 Two-sided sigal (o-causal
20 Properties of ROC ROC of Differet Types of Sequeces Fiite legth: 0 The ROC for a fiite-legth sequece is the etire -plae ROC { :0 < < } except possibly 0 ad Righted-sided: The ROC for a right-haded sequece exteds outward from the outermost pole possibly icludig R Left-sided: The ROC for a left-haded sequece exteds iward from the iermost pole possibly icludig 0 ROC { : 0 < < R + } Two-sided (ifiite x [ ] 0 for < ad > x [ ] 0 for < x [ ] 0 for > The ROC of a two-sided sequece is a rig bouded by poles ROC { : R < < R + } 0 ROC { : < < } 0
21 3.4 -Trasform Properties
22 Liearity otatio Example:
23 Note that the ROC of combied sequece may be larger tha either ROC This would happe if some pole/ero cacellatio occurs Example: x a u - a u-n [ ] [ ] [ ] Both sequeces are right-sided Both sequeces have a pole a Both have a ROC defied as > a I the combied sequece the pole at a cacels with a ero at a The combied ROC is the etire plae except 0 3
24 Time Shiftig (Bilateral Trasform o > 0 ; right shift o < 0 ; left shift 3.4 The ew trasform may add or remove poles at 0 or Uit delay Z{ x[ ]} x[ ] m x[ ] x[ m] m ( Z{ x[ ]} 4
25 Time Shiftig (Uilateral Right Shift (Delay For a ocausal sigal x[], fid the uilateral -trasform of x(-m i terms of X(, the uilateral -trasform of x[] Let X( Z{ x( u( } : Uilateral -trasform of x[ ] The the uilateral -trasform of x( - m, m> 0 is { } Z x( m u( x( m Let r -m r+ m { } 0 Z x( m u( x( r rm ( r+ m -m We ca pull out i fro -m r -m r -m -m r { } { } { } t of the summatio: Z x ( m xr ( + xr ( Z x ( + xr ( r 0 r m rm -m -m Z x( m X( + x( m 5
26 Left Shift (Advace If xu [ ] [ ] X( m m m the x [ + mu ] [ ] X( x [ ] m > 0 0 6
27 Example: Time Shiftig (Uilateral Example: Fid the -trasform of the followig differece equatio: y ( y ( x ( for 0 ad y( 3 Trasform the differece equatio usig the uilateral Z-trasform: { ( } Y( { } Z y Z y( Y( + y( Y( Y( X( 3 Y( X( + X( 3 Y( + X( 3 Y( + 7
28 Multiplicatio by Expoetial Sequece 3.5. ROC is scaled by o. All pole/ero locatios are scaled 3. If o is a positive real umber: -plae shriks or expads 4. If o is a complex umber with uit magitude -plae rotates 8
29 Differetiatio of X( 3.6 9
30 Proof Fid the trasform of x( : First,write the Z trasform of x ( : { } X( Z x( x( dx ( d dx ( d x( x( dx ( Z{ x( } d Example: x ( au ( X( Z{ a u( } a dx ( d a a d d a a ( a ( a ( a 30
31 Cojugatio of a Complex Sequece Time Reversal 3.8 ROC is iverted 3
32 Proof Fid the -trasform of x[ ]: Z x[ ] x[ ] { } Let m - Z x[ ] x[ m] m { } m m m m Z x x m X { [ ]} [ ] X m ( Poles i X( become eros i X. Zeros i X( move to poles The ROC for X is: where R is the ROC for X(. R i X. 3
33 Covolutio of Sequeces Covolutio i time domai is multiplicatio i -domai 33
34 Proof Z x k x k Z x m x k m m { [ ] [ ]} [ ] [ ] x[ m] x[ km] k m m m [ ] [ ] x m x km k ( r+ m [ ] [ ] x m x r k [ ] [ ] k k m r x[ m ] x[ r] m k X X Covolutio defiitio Take -trasform Z-trasform defiitio Iterchage summatio r k - m Z-trasform defiitio 34
35 Example 3.9 : Evaluatig a Covolutio Let The correspodig -trasform are If a <, the -trasform of the covolutio is the Correspodig sequece is ] [ ] [ ad ] [ ] [ u x u a x,, ( 0 a a a X >,, ( 0 > X. ( ( ( ( ( > a a a a Y ]. [ ] [ ( ] [ u a u a y + 35
36 Iitial Value Theorem x[ ] X ( If the iitial value of x[] ca be computed directly from X(: x[0] lim X ( x[] x[ q] lim lim [ X ( x[0] ] q q q [ X ( x[0] x[]... x[ q ] ] To prove this: 0 for 0 x[ ] 0 for 0 ad applyig the limit left ad right of X ( x[ ]
37 Example : Iitial Value Theorem ( Cosider X ( x[ ] ( u[ ] For the iitial value theorem x[0] lim X ( x[] lim x[ q] lim [ X ( x[0] ] q q q [ X ( x[0] x[]... x[ q ] ] So for the particular case x[0] lim x[] lim lim ( lim 37
38 Fial Value Theorem Suppose that x[] has a limit for approachig ifiity, the lim x[ ] lim( X ( The fial value theorem oly holds if x[] has a limit for approachig ifiity, this coditio holds if the -trasform X( is a ratioal fuctio i ad all its poles are, i magitude, strictly less tha, except oe that may be equal to (ad the is caceled by (- A pole equal to meas a costat term i the discrete-time domai, so a limited term A pole larger tha (e.g. meas a ulimited term i the discrete-time domai ( u[] If these coditios are verified, the [( X ( ] lim x[ ] 38
39 Example : Fial Value Theorem Cosider ( x[ ] ( 0.5 u[ ] X ( lim x[ ] Check if the limit exists if X( is a ratioal fuctio the magitude of all the poles must be strictly less tha, except oe pole oly that may be equal to this is the same as sayig that the locus must belog to the regio of covergece of (-X( the pole i this case is p-0.5 so p -0.5 < there are o other poles The limit exists ad ca be computed as lim x[ ] [( X ( ] ( 0 39
40 40
41 3.3 The Iverse -Trasform X ( x[ ] -Trasform: aalysis equatio time domai x [ ] X( -domai Iverse -Trasform: sythesis equatio x[ ] X( d π j C 4
42 Iverse Z-Trasform X ( + ROC uique x[ ] Formal iverse -trasform is based o a Cauchy itegral I most applicatios, we may take less formal ways for iversio Ispectio method Partial fractio expasio Power series expasio

43 Cauchy Itegral Theorem Augusti Louis Cauchy ( Frech mathematicia a early pioeer of aalysis gave several importat theorems i complex aalysis 43
44 Cauchy Itegral Theorem says that if two differet paths coect the same two poits, ad a fuctio is holomorphic everywhere "i betwee" the two paths, the the two path itegrals of the fuctio will be the same. A complex fuctio is holomorphic if ad oly if it satisfies the Cauchy-Riema equatios. The theorem is usually formulated for closed paths as follows: Let f( be a complex fuctio ad aalytic (holomorphic o a simply coected domai D. The for ay simple closed cotour C i D, f ( d 0 C Cauchy s Itegral Formula Let f( be aalytic o ad iside a simple closed cotour C. The for ay iside C, f ( f ( w dw πi w C 44
45 Cauchy Residue Theorem Let f( be aalytic o ad iside a simple closed cotour C except for a fiite umber of isolated sigularities at,,, N. The i N f ( d Res( f(, π C 45
46 Cauchy-Lauret Series The -trasform is a form of the Cauchy-Lauret series ad is a aalytic fuctio at every poit i the ROC Let f( deote a aalytic (or holomorphic fuctio over a aular regio Ω cetered at o Im( o Ω Re( 46
47 The f ( ca be expressed as the bilateral series f( α( o where ( + α f ( ( o d π j γ γ beig a closed ad couterclockwise itegratio cotour cotaied i Ω 47
48 Iverse Trasform Geeral Expressio: Recall that, for r e, the -trasform X( give by is merely the DTFT of the modified sequece jω j X ( x [ ] x [ ] r e ω x[ r ] Accordigly, the iverse DTFT is thus give by j j xr [ ] π X( re ω e ω dω π π By makig a chage of variable jω r e, the previous equatio ca be coverted ito a cotour itegral give by C [ ] ( π j x X d C where is a couterclockwise cotour of itegratio defied by r 48
49 But the itegral remais uchaged whe it is replaced with ay cotour C ecirclig the poit 0 i the ROC of X( The cotour itegral ca be evaluated usig the Cauchy s residue theorem resultig i x [ ] X( d π i c [residues of X( at all poles iside C] X ( i ( i i Calculatio of residues a simple pole at 0 a s th order pole at 0 Res[ X ( at 0] ψ ( 0 ψ ( where X( 0 s d ψ ( Res[ X( at 0] s ψ ( where X( s ( ( s! d
50 Example of Iverse -Trasform X ( > a a x[ ] d d πi c a πi c a Ψ ( ad Ψ ( Ψ ( a a 0 x [ ] a, 0 50
51 Practical Ways to fid Iverse Trasform Iverse -Trasform is defied: x [ ] X( d π j Yuk! Usig the defiitio requires a cotour itegratio i the complex -plae. Fortuately, we ted to be iterested i oly a few basic sigals (pulse, step, etc. Virtually all of the sigals we ll see ca be built up from these basic sigals. For these commo sigals, the -trasform pairs have bee tabulated, ad we ca fid iverse -trasform by ispectio Two other methods to fid the iverse of -Trasform for more geer al cases: Partial fractio expasio method Power-series method 5
52 Partial Fractio Expasio Method A -trasform X( is said to be ratioal if it is a ratio of polyomials i. For a ratioal fuctio X(, we ca write X( as a sum of simpler terms by partial fractio expasio (PFE After PFE, we ca use kow trasform pairs to get the iverse trasform of each term. Geeral form of a ratioal X( is X ( M M k bk k 0 b0 k N N k a0 ak k 0 k ( c ( d k k eros poles 5
53 Partial fractio expasio If M < N (we say X( is proper If M N (ot proper N k k M k k k N k k k M k k d c a b a b X ( ( (. ( ( where ( 0 k d k k N k k k X d A d A X ( K k k k N M r r r d A B X ca be obtaied by log divisio. B k 53
54 If X( has multiple-order poles of order s at d i, the the formula becomes ( X exists oly if M N MN s A C r k m Br m r 0 d k m ( d i where B r all first order poles A k ( dk X ( ca be obtaied by log divisio. a order s pole sm C d s l ( d sm sm i X ( ( s m!( di d d There will be a similar term for every high-order pole p k. i Third term represets a order s pole There will be a similar term for every high-order pole Each term ca be iverse trasformed by ispectio 54
55 Iversio of each term Simple poles γ u [ ] if ROC > γ γ γ u[ ] if ROC < γ γ Multiple poles + m m ( + ( + m u [ ] if ROC m γ > γ ( m! m γ γ ( + ( + m γ u[ ] if ROC < γ ( m! m ( ( + m m 55
56 Example : Secod-order -Trasform X ( ( a ( b A B + ( a ( b a b ( + ( a b ( a b a ( b Give a > b. > a > b a b x [ ] ( au [ ] + ( bu [ ] (right-sided ab ba a > > b b a ROC x [ ] ( bu [ ] ( au[ ] (double-sided ba ab a > b > a b x [ ] ( au[ ] ( bu[ ] (left-sided ab ba 56


57 Example 3.8 ROC exteds to ifiity Idicates a right-sided sequece 57
58 Note: Sometimes the -trasform X( is give i positive powers of I this case, i order to achieve the PFE form give above, we eed to factor a out of the umerator term F( F( X( G( G( The term i parethesis is used i the partial fractio expasio: X( F( A A A3 A G( p p p3 p F ( A A A 3 X( G ( p p p 3 p A A A A p p p p 3 3 A 58
59 Example Suppose the system trasfer fuctio is: H( ad we wated the fid the step respose of the system: x( u( X( Z{ x( } Y( X( H( F( Y( G ( ( F( Y ( G( ( 59
60 F( Now we do a partial fractio expasio of G( A B + ( ( A B( + ( ( A ( A+ B + B A+ B A B 0 A B Y( ( y [ ] Z Y( { } y [ ] u [ ] 60
61 Example X( F( G ( F( We ca multiply ad divide by without chagig the expressio: G ( F( G( ( The expressio i brackets is the fuctio we wat to write i a partial fractio expasio: F( G( ( Factorig the deomiator: ( ( ( + The partial fractio expasio is A B C + + ( ( + ( ( + 6
62 A ( ( + 0 B ( + 4 C ( 4 X( x [ ] Z { X( } Z { } + Z + Z x [ ] δ[ ] + ( u [ ] + ( u [ ] 4 4 6

63 What about M N?, i.e. X( is ot proper Example 3.9 Cosider a sequece. ( ( ( 3 ( > X 63
64 Sice M N, we have We fid Sice the ROC is >, 0 ( + + A A B X 8 9 ( + + X ]. [ 8 ] [ 9 ] [ ] [ u u x + δ ROC exteds to ifiity Idicates a right-sided sequece
65 X( X( X( ( A A X( B Example: We ca fid the iverse ot proper usig polyomials i - Ratio of polyomials i terms of Divide through by the highest power of Factor deomiator ito firstorder factors Use partial fractio decompositio to get firstorder terms 65
66 Fid B 0 by polyomial divisio Express i terms of B 0 Solve for A ad A ( 5 ( X A A proper 66
67 Express X( i terms of B 0, A, ad A X 9 ( + Use table to obtai iverse - trasform 8 With the uilateral -trasform, or the bilateral -trasform with regio of covergece, the iverse -trasform is uique. γ u [ ] γ γ x [] k δ [] k 9 u[ k] + 8 u[ k] k 67
68 Complex Poles We cosider oly distict complex poles If x[] is real, ad if its -trasform has a complex pole i, the its complex cojugate i* is also a pole It ca be show that their partial fractio coefficiets are also complex cojugates Therefore assumig causal, the cotributio of two complex cojugate poles is of the form * * x [ ] [ A ( p + A ( p ] u[ ] k k k k k If we express the poles ad coefficiets as j k A A e α, p re k k k k jβ k The we ca show that the iverse trasform is x [ ] A r cos( β + α u[ ] k k k k k 68

69 Example 69
70 70
71 7
72 Power Series Expasio Method The -trasform is a power series I expaded form X X ( x[] -trasforms of this form ca geerally be iversed easily Especially useful for fiite-legth series ( + x[ ] + x[ ] + x[ 0] + x[ ] + x[ ] +
73 Example 3.0 : Suppose X( is give i the form ( ( ( ( + X ( + X Otherwise. 0, 0,,, ] [ x 73 [] [ ] [ ] [ ] [ ] δ δ δ δ x
74 Example 3. 74
75 Example Assume a causal x[] X( 0.4 Dividig by ( -0.4: 3 3 ( (0.4 + ( (0.4 X 3 3 ( (0.4 + ( (0.4 3 { } x(,.,(.,(., (. Which we recogie as: x( (0.4 u ( 75
76 Example Assume a causal x[] X( + ( 0.5( Perform the idicated divisio: x [ ] {0,0.5,0.6,0.54, } Note that: the results should be exactly the same as the results obtaied via partial fractio expasio 76

77 NB: For bilateral trasforms, we eed to get a series i or i - depedig o the ROC!!! 77
78 DE Solutio via (oe-sided -Trasform Cosider the LCCDE Assume the iitial coditio y[0] Apply the oe-sided -trasform to both sides: Solve: (by partial fractio expasio Iverse -trasform [ ] ( ( (0 ( U Y y Y + 0 coverget (if ( U [ ] [ ] Y Y Y Y y Y ( ( ( ( ( (0 ( ( ( ( ( ( ( Y 3 3 ( + + Y ] [ ( 3 ] [ 3 ] [ u u y + 78 [ ] [ ] [ ]. y y u + +
79 Example : Cosider a LTI system with iput x[] ad output y[] that satisfies the differece equatio Determie all possible values for the system s impulse respose h[] at 0. ] [ ] [ ] [ ] [ 5 ] [ + x x y y y ( ( 5 ( ( + X Y ( 3 / ( 3 / ( ( ( 5 ( ( ( ( ( + + X Y H 79
80 + > + < < < 3 [0] ] [ ( 3 ] [ 3 ( [0] ] [ ( 3 ] [ 3 ( 3 [0] ] [ ( 3 ] [ 3 ( / 0 [0] ] [ ( 3 ] [ 3 ( / ROC h u u h No h u u h h u u h h u u h ( 3 / ( 3 / ( ( ( 5 ( ( ( ( ( + + X Y H 80
81 3.x. DT LTI System Aalysis usig the - Trasform Liear Costat-Coefficiet Differetial Equatios for CT systems N k M r d y( t d x( t α βr r dt k k k 0 dt r 0 Liear Costat-Coefficiet Differece Equatios for DT systems N a y( k b x( r M k k 0 r 0 N M ak br y ( y ( k + x ( r a a k 0 r 0 0 r 8
82 For a causal system, we require M N (most geeral case MN Without loss of geerality, we set a 0 [ ] [ ] N [ + ] N [ ] + b x[ ] + bx[ ] + + b x[ M + ] + b x[ M] y ay a y N a y N 0 M M Fiite impulsive respose system (FIR: whe all a i 0 except a 0 Ifiite impulsive respose system (IIR: at least oe a i 0 A DT LTI system is defied by Differece equatio + Iitial coditios 8
83 Advaces ad Delays Sometimes differece equatios may be preseted i terms of uit advace operators rather tha uit delay operators y[k+] 5 y[k+] + 6 y[k] 3 x[k+] + 5 x[k] Oe ca make a substitutio that reidexes the equatio so that it is i terms of delays For example, i above equatio, substitute k with k- to yield y[k] 5 y[k-] + 6 y[k-] 3 x[k-] + 5 x[k-] Before takig the -trasform, recogie that we work with time k 0 so u[k] is ofte implied NB: y[k-] y[k-] u[k] y[k-] u[k-] 83
84 - as a Delay Operator Let x[ ] y[ ] x[ ] x[ ] - is somethig like a uit delay operator! Geerally, Let X( x[ ] ad Y( X( The ( [ ] Y x x [ ] ( + xm [ ] m m Z{ x[ ]} Therefore y [ ] x [ ] X( - X( - x[] x[-] 84
85 Liear Differece Equatios Discrete-time LTI systems ca be characteried by differece equatios, e.g. y[k] (/ y[k-] + (/8 y[k-] + x[k] By usig the uit delay operators -, we ca represet the equatio i a sigal flow graph x[k] + + Σ + - y[k] / y[k-] - /8 y[k-] 85
86 Trasform Solutio of Liear Differece Equatios A DT LTI system is defied by Differece equatio + Iitial coditios The uilateral -trasform is well suited to solvig differece equatios with iitial coditios. As i the case of the Laplace trasform with differetial equatios, the -trasform coverts differece equatios ito algebraic equatios 86
87 First-order Differece Equatios Cosider a liear, time-ivariat discrete-time system y [ ] + ay[ ] bx[ ] Applyig the -trasform to the equatio it follows: ( Y ( + y[ ] bx ( Y ( + a Solvig for Y( ad rearragig the terms: ay[ ] b Y ( + X ( + a + a Notice the presece of a term related to the iitial coditio ad a term related to the iput For ero iitial coditio Y ( b + a X ( y [ ] Y ( + y[ ] 87
88 Example As a specific example, cosider y [ ] 0.8 y [ ] x [ ] (0.5 u [ ] y[ ] 0 : ero iitial coditio 0.8 y[ ] Y( + X( but 0.5 Z u[ ] X ( 0.5 The (-trasform of the output is therefore: Y ( y[ ] ( 0.5( (0.8* ( 0.5 ( 0.8 u[ ] 0.5* 0.8 u[ ] / 0.3 ROC >0.8 ero-state respose 88
89 Secod-order Differece Equatios Cosider a liear, time-ivariat discrete-time system y [ ] + a y[ ] + a y[ ] b0 x[ ] + b x[ ] Applyig the -trasform to the equatio it follows: ( ( ( ( ( [ ] Y( + a Y( + y[ ] + a Y( + y[ ] + y[ ] bx + b X + x 0 Solvig for Y( ad rearragig the terms: ( ay[ ] ay[ ] ay[ ] bx[ ] + + Y( + a+ a b + b + a a X( y y [ ] Y ( + y[ ] + y[ ] [ ] Y ( + y[ ] 89
90 Example : As a specific example, cosider the system described by a differece equatio y[k] 5 y[k-] + 6 y[k-] 3 x[k-] + 5 x[k-] y[-] /6, y[-] 37/36 x[k] -k u[k] Y[ ] 5 Y[ ] + y[ ] + 6 Y [ ] + y[ ] + y[ ] 3 X[ ] + x[ ] + 5 X [ ] + x[ ] + x[ ] Y [ ] [ ] Y k k k [ ] ( 0.5 ( + ( 3 uk [ ] yk ( 90
91 Example : Cosider the discrete time step iput sigal u Z [ ] X ( to the secod order differece equatio with ero iitial coditio 6 y [ ] 5 y [ ] + y [ ] x [ ] To calculate the solutio, multiply ad express as partial fractios Y ( (3 ( ( (3 ( ( 0.67 ( / 3 y[ ] (0.67(/ ( / 0.5(/ u[ ] ( ero-state respose 9
92 Zero-State Respose Cosider the ero-state respose Zero iitial coditios: y[-k] 0 for all k > 0 Oly causal iputs: x[-k] 0 for all k > 0 Write geeral th order differece equatio [ ] + [ ] + + [ ] [ ] + [ ] + + [ ] yk ayk a yk N bxk bxk b xk M N 0 yk [ m] uk [ ] Y[ ] + 0 xk [ m] uk [ ] X[ ] + 0 m m N+ N M+ M ( + a + + an + an Y[ ] ( b0 + b + + bm + bm X[ ] [ ] { ero state respose} [ ] X[ ] Z{ iput} [ ] H[ ] X[ ] H Y Y Z b + b + + b + b yk [ ] hk [ ] xk [ ] M+ M 0 M N N+ N + a + + an + an Zero state respose covolutio of iput with impulse respose M 9

93 Zero-Iput ad Zero-State Compoets 93
94 94
95 95
96 96

97 Example 97
98 98
99 99
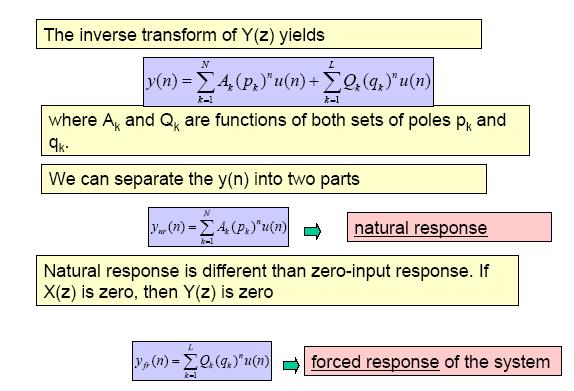
100 Trasfer Fuctios We ca separate the respose of a DT LTI system Zero state respose of the system to a give iput with ero iitial coditios Zero iput respose to iitial coditios oly Cosider the ero-state respose Zero iitial coditios: y[-k] 0 for all k > 0 Oly causal iputs: x[-k] 0 for all k > 0 00
101 Write geeral th order differece equatio [ ] + [ ] + + [ ] [ ] + [ ] + + [ ] yk ayk a yk N bxk bxk b xk M N 0 yk [ m] uk [ ] Y[ ] + 0 xk [ m] uk [ ] X[ ] + 0 m m N N M M ( + a + + an + an Y[ ] ( b0 + b + + bm + bm X[ ] [ ] { ero state respose} [ ] X[ ] Z{ iput} [ ] H[ ] X[ ] H Y Y Z b + b + + b + b ( M M 0 M M ( N N + a + + an + an M 0
102 The trasfer fuctio of the system is defied as H( Y( X( + M k 0 N k b k k a k k a polyomial i (or - H(: may be viewed as a ratioal fuctio of a complex variable ( or -. ero iitial coditios!! 0
103 Relatio betwee h[] ad H [] I the discrete time domai, a system ca be described by the covolutio represetatio, i particular, h[] beig the uit-impulse respose with ero iitial coditio [ ] [ ] [ ] y h x h[ i] x[ i] 0,,,... i 0 Applyig the -trasform: Y ( H ( X ( Notice that H( represets the output whe the iput X(, beig the -trasform of δ[] h [ ] H( 03
104 Either ca be used to describe the system Havig oe is equivalet to havig the other sice they are a - trasform pair By defiitio, the impulse respose, h[k], is y[k] h[k] whe x[k] δ[k] Z{h[k]} H[] Z{δ[k]} H[] H[] h[k] H[] Sice discrete-time sigals ca be built up from uit impulses, kowig the impulse respose completely characteries the LTI system 04
105 Example : Trasfer Fuctio Cosider the system defied by the differece equatio y [ ] y[ ] x[ ] The same system ca be represeted by its uit-pulse respose h[] h [ ] u[ ] H( By takig -trasform of the differece equatio for IC0, we get Y ( X ( We get the trasfer fuctio which is idetical to the -trasform of impulse respose ( H 05
106 Trasfer Fuctio iput sigal x( [ ] X ( Z x( LTI System h ( H ( [ ] H ( Z h( output sigal y ( [ ] Y( Z y( Trasfer fuctio: the ratio of the -trasform of the output sigal ad the -trasform of the iput sigal of the LTI system H( Y( Z[ y( ] X ( Z[ x( ] 06
107 A discrete-time system that has a descriptio i terms of differece equatio ca be described i terms of a ratioal trasfer fuctio The trasfer fuctio carries the iformatio about the dyamics of the system ad it s the -trasform of the uit-impulse respose The poles of the trasfer fuctio tell you the if the step respose is limited (stability Stable: Covergece regio must iclude the uit circle, ad vise versa. Causal: Covergece regio is the exterior of a circle. Stable ad Causal Covergece regio will iclude the uit circle ad the etire -plae outside the uit circle. The output of a system ca be computed (for a give iput ad IC0 i the domai with a simple multiplicatio of the trasfer fuctio times the -trasform of the iput 07
108 Ratioal Trasfer Fuctio Ratioal fuctio is defied as the ratio of polyomials i (or - P( X ( where P( ad Q( are polyomials i Q( Most importat ad useful -trasforms are those for which X( is a ratioal fuctio iside the regio of covergece The trasfer fuctio of a DT LTI system is a ratioal fuctio H( M M k b k k 0 b 0 NM k N N k a0 k k k ( k + a ( p k irreducible or factoried form 08
109 Zeros ad Poles Zeros of H(: values of for which H(0 Poles of H(: values of for which H( For a ratioal trasfer fuctio: The roots of the umerator polyomial (the set { k } are those values of for which H( 0, ad therefore are the eros of H(. The roots of the deomiator polyomial (the set {p k } are those values of for which H(, ad therefore are the poles of H(. Poles may also occur at 0, ad Poles ad regio of covergece No poles of H( ca occur withi the regio of covergece The regio of covergece is bouded by poles 09
110 0 Graphic Represetatio Which coverges Zeros: 0 Poles: a ( ( ( ( ( a u a X u a x a whe a a X > (
111 Discrete Time Eigefuctios Cosider a discrete-time iput sequece ( is a complex umber: x[] The usig discrete-time covolutio for a LTI system: y[ ] k k h[ k] x[ k] h[ k] k H ( h[ k] k k H ( x[ ] Z-trasform of the impulse respose H( h[ k] k But this is just the iput sigal multiplied by H(, the -trasform of the impulse respose, which is a complex fuctio of. Therefore, is a eigefuctio of a DT LTI system, ad H( is correspodig eigevalue k
112 BIBO Stability BIBO stability is exteral stability, ad it depeds o iput-output relatioship The iput-output relatioship is characteried by the impulse respose h[] or trasfer fuctio H[] BIBO stability coditios we have show this before h[] is absolutely summable h [ ] < All the terms i h[] are decayig expoetials All the poles of H[] are withi the uit circle we will show this ow Note that the absolute summability coditio guaratees that the DTFT of h[] will exist. This meas that a discrete-time LTI system is stable if ad oly if the trasfer fuctio has a regio of covergece that icludes the uit circle.
113 Example: a a This is stable if a < k u Z [ k] for > a 3
114 Theorem: A causal LTI system with ratioal trasfer fuctio is BIBO stable if ad oly if all the poles of H( lie iside (ot o the uit circle. Im p max Re ROC uit circle 4
115 Proof Assume all the poles are simple (for multiple poles, we ca make a similar argumet H( ca be expaded i PFE form The (we will show this later whe we discuss iverse trasform Clearly, the -trasform of coverges if ad oly if Therefore, H( coverges for all such that K k k k p A H ( K k K k k k k h u p A h ] [ ] [ ( ] [ <. p k. max max k K k p p > h k [] 5
116 Fact: The ROC of causal H( icludes the uit circle if ad oly if all the poles of H( lie iside the uit circle. Sufficiecy Assume Sice the p k < for k,..., K. h[ ] h[ ] K k K k A ( p k A k p k k u[ ] ad so 0 K K h( Ak pk 0 k A k p k k 0 < sice p k < Hece H( is the trasfer fuctio of a BIBO stable system. 6
117 Necessity: (by cotradictio Suppose there exists a pole p i such that p i >. Clearly, from the Fact the uit circle is ot i the ROC of H(. Therefore, there exists 0 with 0 such that H( 0 does ot absolutely coverge: H ( 0 h( ( 0 0 If there is o such 0 the the uit circle is i the ROC! But the 0 h[ ] h[ ]( h[ ] 0 so H( is ot BIBO stable. H ( 0 0 h[ ] 0 7
118 Commets o the Theorem We say that a system with its impulse respose g[] is ati-causal if g[-] is a causal sequece. Corollary: A ati-causal liear system with ratioal trasfer fuctio G ( Z{ g( } is BIBO stable if ad oly if all the poles of G( lie outside (ot o the uit circle. Theorem (most geeral: A liear system with ratioal trasfer fuctio is BIBO stable if ad oly if the ROC cotais the uit circle. This applies to causal, ati-causal, or otherwise. 8
119 Causal Systems For causal systems, h[] 0 for egative. I this case, the trasfer fuctio sum oly has terms for positive : H( h[ ] 0 So if the ROC of the trasfer fuctio of a causal system cotais a circle of radius r i the complex plae, it must also cotai all circles of radius greater tha r. The ROC of the trasfer fuctio of a causal system always looks like this: Im{} RoC Re{} 9
120 Stability of Causal Systems The places where the trasfer fuctio is ifiite (the poles determie the regio of covergece. As log as all the poles lie strictly iside the uit circle, the regio of covergece will iclude the uit circle ad the system will be stable. This is true oly for causal systems. Im{} x x x x RoC Re{} I the case of a causal LTI system, the stability coditio is equivalet to the requiremet that the trasfer fuctio H( has all of its poles iside the uit circle. 0
121 Example 3.7 : Stability, Causality, ad the ROC Cosider a system with impulse respose h[] The -trasform H( ad the pole-ero plot show below Without ay other iformatio h[] is ot uiquely determied Three possible ROCs are >; or <½; or ½< < (why? If we kow some other iformatio about the system, we may be able to determie the ROC If system stable, the the ROC must iclude uit-circle ROC: ½< < If system is causal, h[] is right sided ROC : > (ot stable
122 LTI System Descriptio: Summary N Time Domai impulse respose y ( bkx ( ( k ak ( y ( k h [ ] M k 0 k Z Domai trasfer fuctio Z h( FT Frequecy Domai: frequecy respose H( N k 0 M bk ( + ak ( k k k Z - FT- j j e ω ω e jω He ( N k 0 M bke ( + ake ( k jω k jω k
123 Appedix I. Geometric Series Formula A basic aalysis tool used i -trasform evaluatio ad iversio is the geometric series formula. If N s[ N ] a[ ] a[0] + a[] a[ N ] 0 where a[ i + ] a[ i] r commo ratio the s[ N ] a[0] N r a[0] 0 r r N ad if r < (covergece criteria s[ ] a[0] r 0 a[0] r 3
124 Appedix II. Iteral Stability All trasiet respose vaishes as t Trasiet respose cosists of atural modes That meas the magitudes of all the atural frequecies are less tha Stable: All the poles of H[] is withi the uit circle Ustable: Oe or both of the followig coditios are met At least oe pole of H[] is outside of the uit circle There are repeated poles o the uit circle Margially stable: No poles outside of the uit circle, ad there are some simple poles o the uit circle Iteral Stability BIBO Stability, but ot ecessarily the other directio 4
125 Examples Example : stable system H( p j p 0.8 < 0.6 p j p 0.8 < Example : ustable system 0.6 H( p j p. > 0.4 p j p. > 5
126 Appedix III. -Trasform ad Laplace Trasform Let x[] be a discrete-time sigal geerated by samplig a aalog sigal x(t We ca cosider a aalog sampled sigal where f x[ ] x( T s ( ( ( x t x t f comb f t x( kt δ ( tkt s δ T s k 0 s s s s k 0 xk [ ] δ ( tkt These two sigals are equivalet i the sese that their stregths, i.e., the heights, are same at correspodig poits. s 6
127 Let s cosider a DT system with its impulse respose, h[], ad a CT system with its impulse respose,. ( [ ] δ ( hδ t h t T If x[] is applied to the DT system ad δ is applied to the CT system, the their resposes will be equivalet i the sese that the stregths (heights are the same. x 0 ( t - s 7
128 The trasfer fuctio of the DT system is H ( [ ] h 0 ad the trasfer fuctio of the CT system is The equivalece betwee them ca be obtaied by, The relatioship betwee s-plae ad -plae 0 Hδ ( s h[ ] e T s ( ( st s H s H δ e s st e s, s l T s 8


129 Mappig of the s-plae to the -plae 9
130 s σ + jω Let, the σts e e jωt s The above relatios show the followig: The imagiary axis of the s-plae betwee mius half the samplig ad plus half the samplig frequecy maps oto the uit circle i the -plae. The portio of the s-plae to the left of the red lie maps to the iterior of the uit circle i the plae. The portio of the s-plae to the right of the red lie maps to the exterior of the uit circle i the plae. The gree lie (lie of costat sigma maps to a circle iside the uit circle i the -plae. Lies of costat frequecy i the s-plae maps to radial lies i the -plae. The origi of the s-plae maps to i the -plae. The egative real axis i the s-plae maps to the uit iterval 0 to i the -plae. 30
131 Differet lie segmets i the s-plae may map ito the same cotour i the -plae. e st s 3




132 The s-plae ca be divided ito horiotal strips of width equal to the samplig frequecy. Each strip maps oto a differet Riema surface of the "plae". Mappig of differet areas of the s plae oto the -plae is show below. 3
133 33
Chapter 7: The z-transform. Chih-Wei Liu
 Chapter 7: The -Trasform Chih-Wei Liu Outlie Itroductio The -Trasform Properties of the Regio of Covergece Properties of the -Trasform Iversio of the -Trasform The Trasfer Fuctio Causality ad Stability
Chapter 7: The -Trasform Chih-Wei Liu Outlie Itroductio The -Trasform Properties of the Regio of Covergece Properties of the -Trasform Iversio of the -Trasform The Trasfer Fuctio Causality ad Stability
The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j
![The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j](/thumbs/82/85448534.jpg "The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j") The -Trasform 7. Itroductio Geeralie the complex siusoidal represetatio offered by DTFT to a represetatio of complex expoetial sigals. Obtai more geeral characteristics for discrete-time LTI systems. 7.
The -Trasform 7. Itroductio Geeralie the complex siusoidal represetatio offered by DTFT to a represetatio of complex expoetial sigals. Obtai more geeral characteristics for discrete-time LTI systems. 7.
Chapter 7 z-transform
 Chapter 7 -Trasform Itroductio Trasform Uilateral Trasform Properties Uilateral Trasform Iversio of Uilateral Trasform Determiig the Frequecy Respose from Poles ad Zeros Itroductio Role i Discrete-Time
Chapter 7 -Trasform Itroductio Trasform Uilateral Trasform Properties Uilateral Trasform Iversio of Uilateral Trasform Determiig the Frequecy Respose from Poles ad Zeros Itroductio Role i Discrete-Time
Definition of z-transform.
 - Trasforms Frequecy domai represetatios of discretetime sigals ad LTI discrete-time systems are made possible with the use of DTFT. However ot all discrete-time sigals e.g. uit step sequece are guarateed
- Trasforms Frequecy domai represetatios of discretetime sigals ad LTI discrete-time systems are made possible with the use of DTFT. However ot all discrete-time sigals e.g. uit step sequece are guarateed
3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,
![3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,](/thumbs/82/85448051.jpg "3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,") 3. Z Trasform Referece: Etire Chapter 3 of text. Recall that the Fourier trasform (FT) of a DT sigal x [ ] is ω ( ) [ ] X e = j jω k = xe I order for the FT to exist i the fiite magitude sese, S = x [
3. Z Trasform Referece: Etire Chapter 3 of text. Recall that the Fourier trasform (FT) of a DT sigal x [ ] is ω ( ) [ ] X e = j jω k = xe I order for the FT to exist i the fiite magitude sese, S = x [
Digital Signal Processing
 Digital Sigal Processig Z-trasform dftwave -Trasform Backgroud-Defiitio - Fourier trasform j ω j ω e x e extracts the essece of x but is limited i the sese that it ca hadle stable systems oly. jω e coverges
Digital Sigal Processig Z-trasform dftwave -Trasform Backgroud-Defiitio - Fourier trasform j ω j ω e x e extracts the essece of x but is limited i the sese that it ca hadle stable systems oly. jω e coverges
M2.The Z-Transform and its Properties
 M2.The Z-Trasform ad its Properties Readig Material: Page 94-126 of chapter 3 3/22/2011 I. Discrete-Time Sigals ad Systems 1 What did we talk about i MM1? MM1 - Discrete-Time Sigal ad System 3/22/2011
M2.The Z-Trasform ad its Properties Readig Material: Page 94-126 of chapter 3 3/22/2011 I. Discrete-Time Sigals ad Systems 1 What did we talk about i MM1? MM1 - Discrete-Time Sigal ad System 3/22/2011
Generalizing the DTFT. The z Transform. Complex Exponential Excitation. The Transfer Function. Systems Described by Difference Equations
 Geeraliig the DTFT The Trasform M. J. Roberts - All Rights Reserved. Edited by Dr. Robert Akl 1 The forward DTFT is defied by X e jω = x e jω i which = Ω is discrete-time radia frequecy, a real variable.
Geeraliig the DTFT The Trasform M. J. Roberts - All Rights Reserved. Edited by Dr. Robert Akl 1 The forward DTFT is defied by X e jω = x e jω i which = Ω is discrete-time radia frequecy, a real variable.
The Z-Transform. Content and Figures are from Discrete-Time Signal Processing, 2e by Oppenheim, Shafer, and Buck, Prentice Hall Inc.
 The Z-Trasform Cotet ad Figures are from Discrete-Time Sigal Processig, e by Oppeheim, Shafer, ad Buck, 999- Pretice Hall Ic. The -Trasform Couterpart of the Laplace trasform for discrete-time sigals Geeraliatio
The Z-Trasform Cotet ad Figures are from Discrete-Time Sigal Processig, e by Oppeheim, Shafer, ad Buck, 999- Pretice Hall Ic. The -Trasform Couterpart of the Laplace trasform for discrete-time sigals Geeraliatio
The z-transform can be used to obtain compact transform-domain representations of signals and systems. It
 3 4 5 6 7 8 9 10 CHAPTER 3 11 THE Z-TRANSFORM 31 INTRODUCTION The z-trasform ca be used to obtai compact trasform-domai represetatios of sigals ad systems It provides ituitio particularly i LTI system
3 4 5 6 7 8 9 10 CHAPTER 3 11 THE Z-TRANSFORM 31 INTRODUCTION The z-trasform ca be used to obtai compact trasform-domai represetatios of sigals ad systems It provides ituitio particularly i LTI system
ECE-S352 Introduction to Digital Signal Processing Lecture 3A Direct Solution of Difference Equations
 ECE-S352 Itroductio to Digital Sigal Processig Lecture 3A Direct Solutio of Differece Equatios Discrete Time Systems Described by Differece Equatios Uit impulse (sample) respose h() of a DT system allows
ECE-S352 Itroductio to Digital Sigal Processig Lecture 3A Direct Solutio of Differece Equatios Discrete Time Systems Described by Differece Equatios Uit impulse (sample) respose h() of a DT system allows
from definition we note that for sequences which are zero for n < 0, X[z] involves only negative powers of z.
![from definition we note that for sequences which are zero for n < 0, X[z] involves only negative powers of z.](/thumbs/82/85448167.jpg "from definition we note that for sequences which are zero for n < 0, X[z] involves only negative powers of z.") We ote that for the past four examples we have expressed the -trasform both as a ratio of polyomials i ad as a ratio of polyomials i -. The questio is how does oe kow which oe to use? [] X ] from defiitio
We ote that for the past four examples we have expressed the -trasform both as a ratio of polyomials i ad as a ratio of polyomials i -. The questio is how does oe kow which oe to use? [] X ] from defiitio
Chapter 4 : Laplace Transform
 4. Itroductio Laplace trasform is a alterative to solve the differetial equatio by the complex frequecy domai ( s = σ + jω), istead of the usual time domai. The DE ca be easily trasformed ito a algebraic
4. Itroductio Laplace trasform is a alterative to solve the differetial equatio by the complex frequecy domai ( s = σ + jω), istead of the usual time domai. The DE ca be easily trasformed ito a algebraic
Z - Transform. It offers the techniques for digital filter design and frequency analysis of digital signals.
 Z - Trasform The -trasform is a very importat tool i describig ad aalyig digital systems. It offers the techiques for digital filter desig ad frequecy aalysis of digital sigals. Defiitio of -trasform:
Z - Trasform The -trasform is a very importat tool i describig ad aalyig digital systems. It offers the techiques for digital filter desig ad frequecy aalysis of digital sigals. Defiitio of -trasform:
Frequency Response of FIR Filters
 EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we itroduce the idea of the frequecy respose of LTI systems, ad focus specifically o the frequecy respose of FIR filters.. Steady-state
EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we itroduce the idea of the frequecy respose of LTI systems, ad focus specifically o the frequecy respose of FIR filters.. Steady-state
6.003 Homework #3 Solutions
 6.00 Homework # Solutios Problems. Complex umbers a. Evaluate the real ad imagiary parts of j j. π/ Real part = Imagiary part = 0 e Euler s formula says that j = e jπ/, so jπ/ j π/ j j = e = e. Thus the
6.00 Homework # Solutios Problems. Complex umbers a. Evaluate the real ad imagiary parts of j j. π/ Real part = Imagiary part = 0 e Euler s formula says that j = e jπ/, so jπ/ j π/ j j = e = e. Thus the
COMM 602: Digital Signal Processing
 COMM 60: Digital Sigal Processig Lecture 4 -Properties of LTIS Usig Z-Trasform -Iverse Z-Trasform Properties of LTIS Usig Z-Trasform Properties of LTIS Usig Z-Trasform -ve +ve Properties of LTIS Usig Z-Trasform
COMM 60: Digital Sigal Processig Lecture 4 -Properties of LTIS Usig Z-Trasform -Iverse Z-Trasform Properties of LTIS Usig Z-Trasform Properties of LTIS Usig Z-Trasform -ve +ve Properties of LTIS Usig Z-Trasform
The z Transform. The Discrete LTI System Response to a Complex Exponential
 The Trasform The trasform geeralies the Discrete-time Forier Trasform for the etire complex plae. For the complex variable is sed the otatio: jω x+ j y r e ; x, y Ω arg r x + y {} The Discrete LTI System
The Trasform The trasform geeralies the Discrete-time Forier Trasform for the etire complex plae. For the complex variable is sed the otatio: jω x+ j y r e ; x, y Ω arg r x + y {} The Discrete LTI System
Discrete-Time Systems, LTI Systems, and Discrete-Time Convolution
 EEL5: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we begi our mathematical treatmet of discrete-time s. As show i Figure, a discrete-time operates or trasforms some iput sequece x [
EEL5: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we begi our mathematical treatmet of discrete-time s. As show i Figure, a discrete-time operates or trasforms some iput sequece x [
Signal Processing in Mechatronics. Lecture 3, Convolution, Fourier Series and Fourier Transform
 Sigal Processig i Mechatroics Summer semester, 1 Lecture 3, Covolutio, Fourier Series ad Fourier rasform Dr. Zhu K.P. AIS, UM 1 1. Covolutio Covolutio Descriptio of LI Systems he mai premise is that the
Sigal Processig i Mechatroics Summer semester, 1 Lecture 3, Covolutio, Fourier Series ad Fourier rasform Dr. Zhu K.P. AIS, UM 1 1. Covolutio Covolutio Descriptio of LI Systems he mai premise is that the
The z transform is the discrete-time counterpart of the Laplace transform. Other description: see page 553, textbook.
 The -Trasform 7. Itroductio The trasform is the discrete-time couterpart of the Laplace trasform. Other descriptio: see page 553, textbook. 7. The -trasform Derivatio of the -trasform: x[] re jω LTI system,
The -Trasform 7. Itroductio The trasform is the discrete-time couterpart of the Laplace trasform. Other descriptio: see page 553, textbook. 7. The -trasform Derivatio of the -trasform: x[] re jω LTI system,
Web Appendix O - Derivations of the Properties of the z Transform
 M. J. Roberts - 2/18/07 Web Appedix O - Derivatios of the Properties of the z Trasform O.1 Liearity Let z = x + y where ad are costats. The ( z)= ( x + y )z = x z + y z ad the liearity property is O.2
M. J. Roberts - 2/18/07 Web Appedix O - Derivatios of the Properties of the z Trasform O.1 Liearity Let z = x + y where ad are costats. The ( z)= ( x + y )z = x z + y z ad the liearity property is O.2
Infinite Sequences and Series
 Chapter 6 Ifiite Sequeces ad Series 6.1 Ifiite Sequeces 6.1.1 Elemetary Cocepts Simply speakig, a sequece is a ordered list of umbers writte: {a 1, a 2, a 3,...a, a +1,...} where the elemets a i represet
Chapter 6 Ifiite Sequeces ad Series 6.1 Ifiite Sequeces 6.1.1 Elemetary Cocepts Simply speakig, a sequece is a ordered list of umbers writte: {a 1, a 2, a 3,...a, a +1,...} where the elemets a i represet
Module 18 Discrete Time Signals and Z-Transforms Objective: Introduction : Description: Discrete Time Signal representation
 Module 8 Discrete Time Sigals ad Z-Trasforms Objective:To uderstad represetig discrete time sigals, apply z trasform for aalyzigdiscrete time sigals ad to uderstad the relatio to Fourier trasform Itroductio
Module 8 Discrete Time Sigals ad Z-Trasforms Objective:To uderstad represetig discrete time sigals, apply z trasform for aalyzigdiscrete time sigals ad to uderstad the relatio to Fourier trasform Itroductio
PRELIM PROBLEM SOLUTIONS
 PRELIM PROBLEM SOLUTIONS THE GRAD STUDENTS + KEN Cotets. Complex Aalysis Practice Problems 2. 2. Real Aalysis Practice Problems 2. 4 3. Algebra Practice Problems 2. 8. Complex Aalysis Practice Problems
PRELIM PROBLEM SOLUTIONS THE GRAD STUDENTS + KEN Cotets. Complex Aalysis Practice Problems 2. 2. Real Aalysis Practice Problems 2. 4 3. Algebra Practice Problems 2. 8. Complex Aalysis Practice Problems
Time-Domain Representations of LTI Systems
 2.1 Itroductio Objectives: 1. Impulse resposes of LTI systems 2. Liear costat-coefficiets differetial or differece equatios of LTI systems 3. Bloc diagram represetatios of LTI systems 4. State-variable
2.1 Itroductio Objectives: 1. Impulse resposes of LTI systems 2. Liear costat-coefficiets differetial or differece equatios of LTI systems 3. Bloc diagram represetatios of LTI systems 4. State-variable
Solutions. Number of Problems: 4. None. Use only the prepared sheets for your solutions. Additional paper is available from the supervisors.
 Quiz November 4th, 23 Sigals & Systems (5-575-) P. Reist & Prof. R. D Adrea Solutios Exam Duratio: 4 miutes Number of Problems: 4 Permitted aids: Noe. Use oly the prepared sheets for your solutios. Additioal
Quiz November 4th, 23 Sigals & Systems (5-575-) P. Reist & Prof. R. D Adrea Solutios Exam Duratio: 4 miutes Number of Problems: 4 Permitted aids: Noe. Use oly the prepared sheets for your solutios. Additioal
EE Midterm Test 1 - Solutions
 EE35 - Midterm Test - Solutios Total Poits: 5+ 6 Bous Poits Time: hour. ( poits) Cosider the parallel itercoectio of the two causal systems, System ad System 2, show below. System x[] + y[] System 2 The
EE35 - Midterm Test - Solutios Total Poits: 5+ 6 Bous Poits Time: hour. ( poits) Cosider the parallel itercoectio of the two causal systems, System ad System 2, show below. System x[] + y[] System 2 The
Appendix: The Laplace Transform
 Appedix: The Laplace Trasform The Laplace trasform is a powerful method that ca be used to solve differetial equatio, ad other mathematical problems. Its stregth lies i the fact that it allows the trasformatio
Appedix: The Laplace Trasform The Laplace trasform is a powerful method that ca be used to solve differetial equatio, ad other mathematical problems. Its stregth lies i the fact that it allows the trasformatio
PAPER : IIT-JAM 2010
 MATHEMATICS-MA (CODE A) Q.-Q.5: Oly oe optio is correct for each questio. Each questio carries (+6) marks for correct aswer ad ( ) marks for icorrect aswer.. Which of the followig coditios does NOT esure
MATHEMATICS-MA (CODE A) Q.-Q.5: Oly oe optio is correct for each questio. Each questio carries (+6) marks for correct aswer ad ( ) marks for icorrect aswer.. Which of the followig coditios does NOT esure
CEMTool Tutorial. The z-transform
 CEMTool Tutorial The -Trasform Overview This tutorial is part of the CEMWARE series. Each tutorial i this series will teach you a specific topic of commo applicatios by explaiig theoretical cocepts ad
CEMTool Tutorial The -Trasform Overview This tutorial is part of the CEMWARE series. Each tutorial i this series will teach you a specific topic of commo applicatios by explaiig theoretical cocepts ad
Exponential Moving Average Pieter P
 Expoetial Movig Average Pieter P Differece equatio The Differece equatio of a expoetial movig average lter is very simple: y[] x[] + (1 )y[ 1] I this equatio, y[] is the curret output, y[ 1] is the previous
Expoetial Movig Average Pieter P Differece equatio The Differece equatio of a expoetial movig average lter is very simple: y[] x[] + (1 )y[ 1] I this equatio, y[] is the curret output, y[ 1] is the previous
Chapter 2 Systems and Signals
 Chapter 2 Systems ad Sigals 1 Itroductio Discrete-Time Sigals: Sequeces Discrete-Time Systems Properties of Liear Time-Ivariat Systems Liear Costat-Coefficiet Differece Equatios Frequecy-Domai Represetatio
Chapter 2 Systems ad Sigals 1 Itroductio Discrete-Time Sigals: Sequeces Discrete-Time Systems Properties of Liear Time-Ivariat Systems Liear Costat-Coefficiet Differece Equatios Frequecy-Domai Represetatio
Lecture 3. Digital Signal Processing. Chapter 3. z-transforms. Mikael Swartling Nedelko Grbic Bengt Mandersson. rev. 2016
 Lecture 3 Digital Sigal Processig Chapter 3 z-trasforms Mikael Swartlig Nedelko Grbic Begt Madersso rev. 06 Departmet of Electrical ad Iformatio Techology Lud Uiversity z-trasforms We defie the z-trasform
Lecture 3 Digital Sigal Processig Chapter 3 z-trasforms Mikael Swartlig Nedelko Grbic Begt Madersso rev. 06 Departmet of Electrical ad Iformatio Techology Lud Uiversity z-trasforms We defie the z-trasform
Signals & Systems Chapter3
 Sigals & Systems Chapter3 1.2 Discrete-Time (D-T) Sigals Electroic systems do most of the processig of a sigal usig a computer. A computer ca t directly process a C-T sigal but istead eeds a stream of
Sigals & Systems Chapter3 1.2 Discrete-Time (D-T) Sigals Electroic systems do most of the processig of a sigal usig a computer. A computer ca t directly process a C-T sigal but istead eeds a stream of
Analog and Digital Signals. Introduction to Digital Signal Processing. Discrete-time Sinusoids. Analog and Digital Signals
 Itroductio to Digital Sigal Processig Chapter : Itroductio Aalog ad Digital Sigals aalog = cotiuous-time cotiuous amplitude digital = discrete-time discrete amplitude cotiuous amplitude discrete amplitude
Itroductio to Digital Sigal Processig Chapter : Itroductio Aalog ad Digital Sigals aalog = cotiuous-time cotiuous amplitude digital = discrete-time discrete amplitude cotiuous amplitude discrete amplitude
Solutions of Chapter 5 Part 1/2
 Page 1 of 8 Solutios of Chapter 5 Part 1/2 Problem 5.1-1 Usig the defiitio, compute the -trasform of x[] ( 1) (u[] u[ 8]). Sketch the poles ad eros of X[] i the plae. Solutio: Accordig to the defiitio,
Page 1 of 8 Solutios of Chapter 5 Part 1/2 Problem 5.1-1 Usig the defiitio, compute the -trasform of x[] ( 1) (u[] u[ 8]). Sketch the poles ad eros of X[] i the plae. Solutio: Accordig to the defiitio,
j=1 dz Res(f, z j ) = 1 d k 1 dz k 1 (z c)k f(z) Res(f, c) = lim z c (k 1)! Res g, c = f(c) g (c)
 = 1 d k 1 dz k 1 (z c)k f(z) Res(f, c) = lim z c (k 1)! Res g, c = f(c) g (c)") Problem. Compute the itegrals C r d for Z, where C r = ad r >. Recall that C r has the couter-clockwise orietatio. Solutio: We will use the idue Theorem to solve this oe. We could istead use other (perhaps
Problem. Compute the itegrals C r d for Z, where C r = ad r >. Recall that C r has the couter-clockwise orietatio. Solutio: We will use the idue Theorem to solve this oe. We could istead use other (perhaps
MAT 271 Project: Partial Fractions for certain rational functions
 MAT 7 Project: Partial Fractios for certai ratioal fuctios Prerequisite kowledge: partial fractios from MAT 7, a very good commad of factorig ad complex umbers from Precalculus. To complete this project,
MAT 7 Project: Partial Fractios for certai ratioal fuctios Prerequisite kowledge: partial fractios from MAT 7, a very good commad of factorig ad complex umbers from Precalculus. To complete this project,
Chapter 6 Infinite Series
 Chapter 6 Ifiite Series I the previous chapter we cosidered itegrals which were improper i the sese that the iterval of itegratio was ubouded. I this chapter we are goig to discuss a topic which is somewhat
Chapter 6 Ifiite Series I the previous chapter we cosidered itegrals which were improper i the sese that the iterval of itegratio was ubouded. I this chapter we are goig to discuss a topic which is somewhat
(A sequence also can be thought of as the list of function values attained for a function f :ℵ X, where f (n) = x n for n 1.) x 1 x N +k x N +4 x 3
 = x n for n 1.) x 1 x N +k x N +4 x 3") MATH 337 Sequeces Dr. Neal, WKU Let X be a metric space with distace fuctio d. We shall defie the geeral cocept of sequece ad limit i a metric space, the apply the results i particular to some special
MATH 337 Sequeces Dr. Neal, WKU Let X be a metric space with distace fuctio d. We shall defie the geeral cocept of sequece ad limit i a metric space, the apply the results i particular to some special
September 2012 C1 Note. C1 Notes (Edexcel) Copyright - For AS, A2 notes and IGCSE / GCSE worksheets 1
 Copyright - For AS, A2 notes and IGCSE / GCSE worksheets 1") September 0 s (Edecel) Copyright www.pgmaths.co.uk - For AS, A otes ad IGCSE / GCSE worksheets September 0 Copyright www.pgmaths.co.uk - For AS, A otes ad IGCSE / GCSE worksheets September 0 Copyright
September 0 s (Edecel) Copyright www.pgmaths.co.uk - For AS, A otes ad IGCSE / GCSE worksheets September 0 Copyright www.pgmaths.co.uk - For AS, A otes ad IGCSE / GCSE worksheets September 0 Copyright
We are mainly going to be concerned with power series in x, such as. (x)} converges - that is, lims N n
} converges - that is, lims N n") Review of Power Series, Power Series Solutios A power series i x - a is a ifiite series of the form c (x a) =c +c (x a)+(x a) +... We also call this a power series cetered at a. Ex. (x+) is cetered at
Review of Power Series, Power Series Solutios A power series i x - a is a ifiite series of the form c (x a) =c +c (x a)+(x a) +... We also call this a power series cetered at a. Ex. (x+) is cetered at
EECE 301 Signals & Systems
 EECE 301 Sigals & Systems Prof. Mark Fowler Note Set #8 D-T Covolutio: The Tool for Fidig the Zero-State Respose Readig Assigmet: Sectio 2.1-2.2 of Kame ad Heck 1/14 Course Flow Diagram The arrows here
EECE 301 Sigals & Systems Prof. Mark Fowler Note Set #8 D-T Covolutio: The Tool for Fidig the Zero-State Respose Readig Assigmet: Sectio 2.1-2.2 of Kame ad Heck 1/14 Course Flow Diagram The arrows here
Analytic Continuation
 Aalytic Cotiuatio The stadard example of this is give by Example Let h (z) = 1 + z + z 2 + z 3 +... kow to coverge oly for z < 1. I fact h (z) = 1/ (1 z) for such z. Yet H (z) = 1/ (1 z) is defied for
Aalytic Cotiuatio The stadard example of this is give by Example Let h (z) = 1 + z + z 2 + z 3 +... kow to coverge oly for z < 1. I fact h (z) = 1/ (1 z) for such z. Yet H (z) = 1/ (1 z) is defied for
62. Power series Definition 16. (Power series) Given a sequence {c n }, the series. c n x n = c 0 + c 1 x + c 2 x 2 + c 3 x 3 +
 Given a sequence {c n }, the series. c n x n = c 0 + c 1 x + c 2 x 2 + c 3 x 3 +") 62. Power series Defiitio 16. (Power series) Give a sequece {c }, the series c x = c 0 + c 1 x + c 2 x 2 + c 3 x 3 + is called a power series i the variable x. The umbers c are called the coefficiets of
62. Power series Defiitio 16. (Power series) Give a sequece {c }, the series c x = c 0 + c 1 x + c 2 x 2 + c 3 x 3 + is called a power series i the variable x. The umbers c are called the coefficiets of
CHAPTER 10 INFINITE SEQUENCES AND SERIES
 CHAPTER 10 INFINITE SEQUENCES AND SERIES 10.1 Sequeces 10.2 Ifiite Series 10.3 The Itegral Tests 10.4 Compariso Tests 10.5 The Ratio ad Root Tests 10.6 Alteratig Series: Absolute ad Coditioal Covergece
CHAPTER 10 INFINITE SEQUENCES AND SERIES 10.1 Sequeces 10.2 Ifiite Series 10.3 The Itegral Tests 10.4 Compariso Tests 10.5 The Ratio ad Root Tests 10.6 Alteratig Series: Absolute ad Coditioal Covergece
Digital signal processing: Lecture 5. z-transformation - I. Produced by Qiangfu Zhao (Since 1995), All rights reserved
, All rights reserved") Digital sigal processig: Lecture 5 -trasformatio - I Produced by Qiagfu Zhao Sice 995, All rights reserved DSP-Lec5/ Review of last lecture Fourier trasform & iverse Fourier trasform: Time domai & Frequecy
Digital sigal processig: Lecture 5 -trasformatio - I Produced by Qiagfu Zhao Sice 995, All rights reserved DSP-Lec5/ Review of last lecture Fourier trasform & iverse Fourier trasform: Time domai & Frequecy
Olli Simula T / Chapter 1 3. Olli Simula T / Chapter 1 5
 Sigals ad Systems Sigals ad Systems Sigals are variables that carry iformatio Systemstake sigals as iputs ad produce sigals as outputs The course deals with the passage of sigals through systems T-6.4
Sigals ad Systems Sigals ad Systems Sigals are variables that carry iformatio Systemstake sigals as iputs ad produce sigals as outputs The course deals with the passage of sigals through systems T-6.4
f(w) w z =R z a 0 a n a nz n Liouville s theorem, we see that Q is constant, which implies that P is constant, which is a contradiction.
 w z =R z a 0 a n a nz n Liouville s theorem, we see that Q is constant, which implies that P is constant, which is a contradiction.") Theorem 3.6.4. [Liouville s Theorem] Every bouded etire fuctio is costat. Proof. Let f be a etire fuctio. Suppose that there is M R such that M for ay z C. The for ay z C ad R > 0 f (z) f(w) 2πi (w z)
Theorem 3.6.4. [Liouville s Theorem] Every bouded etire fuctio is costat. Proof. Let f be a etire fuctio. Suppose that there is M R such that M for ay z C. The for ay z C ad R > 0 f (z) f(w) 2πi (w z)
Lecture 4 Conformal Mapping and Green s Theorem. 1. Let s try to solve the following problem by separation of variables
 Lecture 4 Coformal Mappig ad Gree s Theorem Today s topics. Solvig electrostatic problems cotiued. Why separatio of variables does t always work 3. Coformal mappig 4. Gree s theorem The failure of separatio
Lecture 4 Coformal Mappig ad Gree s Theorem Today s topics. Solvig electrostatic problems cotiued. Why separatio of variables does t always work 3. Coformal mappig 4. Gree s theorem The failure of separatio
EE / EEE SAMPLE STUDY MATERIAL. GATE, IES & PSUs Signal System. Electrical Engineering. Postal Correspondence Course
 Sigal-EE Postal Correspodece Course 1 SAMPLE STUDY MATERIAL Electrical Egieerig EE / EEE Postal Correspodece Course GATE, IES & PSUs Sigal System Sigal-EE Postal Correspodece Course CONTENTS 1. SIGNAL
Sigal-EE Postal Correspodece Course 1 SAMPLE STUDY MATERIAL Electrical Egieerig EE / EEE Postal Correspodece Course GATE, IES & PSUs Sigal System Sigal-EE Postal Correspodece Course CONTENTS 1. SIGNAL
lim za n n = z lim a n n.
 Lecture 6 Sequeces ad Series Defiitio 1 By a sequece i a set A, we mea a mappig f : N A. It is customary to deote a sequece f by {s } where, s := f(). A sequece {z } of (complex) umbers is said to be coverget
Lecture 6 Sequeces ad Series Defiitio 1 By a sequece i a set A, we mea a mappig f : N A. It is customary to deote a sequece f by {s } where, s := f(). A sequece {z } of (complex) umbers is said to be coverget
FIR Filter Design: Part II
 EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we cosider how we might go about desigig FIR filters with arbitrary frequecy resposes, through compositio of multiple sigle-peak
EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we cosider how we might go about desigig FIR filters with arbitrary frequecy resposes, through compositio of multiple sigle-peak
The Z-Transform. (t-t 0 ) Figure 1: Simplified graph of an impulse function. For an impulse, it can be shown that (1)
 Figure 1: Simplified graph of an impulse function. For an impulse, it can be shown that (1)") The Z-Trasform Sampled Data The geeralied fuctio (t) (also kow as the impulse fuctio) is useful i the defiitio ad aalysis of sampled-data sigals. Figure below shows a simplified graph of a impulse. (t-t
The Z-Trasform Sampled Data The geeralied fuctio (t) (also kow as the impulse fuctio) is useful i the defiitio ad aalysis of sampled-data sigals. Figure below shows a simplified graph of a impulse. (t-t
Apply change-of-basis formula to rewrite x as a linear combination of eigenvectors v j.
 Eigevalue-Eigevector Istructor: Nam Su Wag eigemcd Ay vector i real Euclidea space of dimesio ca be uiquely epressed as a liear combiatio of liearly idepedet vectors (ie, basis) g j, j,,, α g α g α g α
Eigevalue-Eigevector Istructor: Nam Su Wag eigemcd Ay vector i real Euclidea space of dimesio ca be uiquely epressed as a liear combiatio of liearly idepedet vectors (ie, basis) g j, j,,, α g α g α g α
Lesson 10: Limits and Continuity
 www.scimsacademy.com Lesso 10: Limits ad Cotiuity SCIMS Academy 1 Limit of a fuctio The cocept of limit of a fuctio is cetral to all other cocepts i calculus (like cotiuity, derivative, defiite itegrals
www.scimsacademy.com Lesso 10: Limits ad Cotiuity SCIMS Academy 1 Limit of a fuctio The cocept of limit of a fuctio is cetral to all other cocepts i calculus (like cotiuity, derivative, defiite itegrals
Mathematical Description of Discrete-Time Signals. 9/10/16 M. J. Roberts - All Rights Reserved 1
 Mathematical Descriptio of Discrete-Time Sigals 9/10/16 M. J. Roberts - All Rights Reserved 1 Samplig ad Discrete Time Samplig is the acquisitio of the values of a cotiuous-time sigal at discrete poits
Mathematical Descriptio of Discrete-Time Sigals 9/10/16 M. J. Roberts - All Rights Reserved 1 Samplig ad Discrete Time Samplig is the acquisitio of the values of a cotiuous-time sigal at discrete poits
GATE ELECTRONICS & COMMUNICATION
 Eighth Editio GATE ELECTRONICS & COMMUNICATION Sigals ad Systems Vol 7 of 0 RK Kaodia Ashish Murolia NODIA & COMPANY GATE Electroics & Commuicatio Vol 7, 8e Sigals ad Systems RK Kaodia & Ashish Murolia
Eighth Editio GATE ELECTRONICS & COMMUNICATION Sigals ad Systems Vol 7 of 0 RK Kaodia Ashish Murolia NODIA & COMPANY GATE Electroics & Commuicatio Vol 7, 8e Sigals ad Systems RK Kaodia & Ashish Murolia
Introduction to Signals and Systems, Part V: Lecture Summary
 EEL33: Discrete-Time Sigals ad Systems Itroductio to Sigals ad Systems, Part V: Lecture Summary Itroductio to Sigals ad Systems, Part V: Lecture Summary So far we have oly looked at examples of o-recursive
EEL33: Discrete-Time Sigals ad Systems Itroductio to Sigals ad Systems, Part V: Lecture Summary Itroductio to Sigals ad Systems, Part V: Lecture Summary So far we have oly looked at examples of o-recursive
Chapter 10: Power Series
 Chapter : Power Series 57 Chapter Overview: Power Series The reaso series are part of a Calculus course is that there are fuctios which caot be itegrated. All power series, though, ca be itegrated because
Chapter : Power Series 57 Chapter Overview: Power Series The reaso series are part of a Calculus course is that there are fuctios which caot be itegrated. All power series, though, ca be itegrated because
Fall 2013 MTH431/531 Real analysis Section Notes
 Fall 013 MTH431/531 Real aalysis Sectio 8.1-8. Notes Yi Su 013.11.1 1. Defiitio of uiform covergece. We look at a sequece of fuctios f (x) ad study the coverget property. Notice we have two parameters
Fall 013 MTH431/531 Real aalysis Sectio 8.1-8. Notes Yi Su 013.11.1 1. Defiitio of uiform covergece. We look at a sequece of fuctios f (x) ad study the coverget property. Notice we have two parameters
TEACHER CERTIFICATION STUDY GUIDE
 COMPETENCY 1. ALGEBRA SKILL 1.1 1.1a. ALGEBRAIC STRUCTURES Kow why the real ad complex umbers are each a field, ad that particular rigs are ot fields (e.g., itegers, polyomial rigs, matrix rigs) Algebra
COMPETENCY 1. ALGEBRA SKILL 1.1 1.1a. ALGEBRAIC STRUCTURES Kow why the real ad complex umbers are each a field, ad that particular rigs are ot fields (e.g., itegers, polyomial rigs, matrix rigs) Algebra
ECE 308 Discrete-Time Signals and Systems
 ECE 38-5 ECE 38 Discrete-Time Sigals ad Systems Z. Aliyazicioglu Electrical ad Computer Egieerig Departmet Cal Poly Pomoa ECE 38-5 1 Additio, Multiplicatio, ad Scalig of Sequeces Amplitude Scalig: (A Costat
ECE 38-5 ECE 38 Discrete-Time Sigals ad Systems Z. Aliyazicioglu Electrical ad Computer Egieerig Departmet Cal Poly Pomoa ECE 38-5 1 Additio, Multiplicatio, ad Scalig of Sequeces Amplitude Scalig: (A Costat
Signal Processing. Lecture 02: Discrete Time Signals and Systems. Ahmet Taha Koru, Ph. D. Yildiz Technical University.
 Sigal Processig Lecture 02: Discrete Time Sigals ad Systems Ahmet Taha Koru, Ph. D. Yildiz Techical Uiversity 2017-2018 Fall ATK (YTU) Sigal Processig 2017-2018 Fall 1 / 51 Discrete Time Sigals Discrete
Sigal Processig Lecture 02: Discrete Time Sigals ad Systems Ahmet Taha Koru, Ph. D. Yildiz Techical Uiversity 2017-2018 Fall ATK (YTU) Sigal Processig 2017-2018 Fall 1 / 51 Discrete Time Sigals Discrete
ENGI Series Page 6-01
 ENGI 3425 6 Series Page 6-01 6. Series Cotets: 6.01 Sequeces; geeral term, limits, covergece 6.02 Series; summatio otatio, covergece, divergece test 6.03 Stadard Series; telescopig series, geometric series,
ENGI 3425 6 Series Page 6-01 6. Series Cotets: 6.01 Sequeces; geeral term, limits, covergece 6.02 Series; summatio otatio, covergece, divergece test 6.03 Stadard Series; telescopig series, geometric series,
Notes 8 Singularities
 ECE 6382 Fall 27 David R. Jackso Notes 8 Sigularities Notes are from D. R. Wilto, Dept. of ECE Sigularity A poit s is a sigularity of the fuctio f () if the fuctio is ot aalytic at s. (The fuctio does
ECE 6382 Fall 27 David R. Jackso Notes 8 Sigularities Notes are from D. R. Wilto, Dept. of ECE Sigularity A poit s is a sigularity of the fuctio f () if the fuctio is ot aalytic at s. (The fuctio does
Math 2784 (or 2794W) University of Connecticut
 University of Connecticut") ORDERS OF GROWTH PAT SMITH Math 2784 (or 2794W) Uiversity of Coecticut Date: Mar. 2, 22. ORDERS OF GROWTH. Itroductio Gaiig a ituitive feel for the relative growth of fuctios is importat if you really
ORDERS OF GROWTH PAT SMITH Math 2784 (or 2794W) Uiversity of Coecticut Date: Mar. 2, 22. ORDERS OF GROWTH. Itroductio Gaiig a ituitive feel for the relative growth of fuctios is importat if you really
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science. BACKGROUND EXAM September 30, 2004.
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Departmet of Electrical Egieerig ad Computer Sciece 6.34 Discrete Time Sigal Processig Fall 24 BACKGROUND EXAM September 3, 24. Full Name: Note: This exam is closed
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Departmet of Electrical Egieerig ad Computer Sciece 6.34 Discrete Time Sigal Processig Fall 24 BACKGROUND EXAM September 3, 24. Full Name: Note: This exam is closed
Complex Analysis Spring 2001 Homework I Solution
 Complex Aalysis Sprig 2001 Homework I Solutio 1. Coway, Chapter 1, sectio 3, problem 3. Describe the set of poits satisfyig the equatio z a z + a = 2c, where c > 0 ad a R. To begi, we see from the triagle
Complex Aalysis Sprig 2001 Homework I Solutio 1. Coway, Chapter 1, sectio 3, problem 3. Describe the set of poits satisfyig the equatio z a z + a = 2c, where c > 0 ad a R. To begi, we see from the triagle
Additional Notes on Power Series
 Additioal Notes o Power Series Mauela Girotti MATH 37-0 Advaced Calculus of oe variable Cotets Quick recall 2 Abel s Theorem 2 3 Differetiatio ad Itegratio of Power series 4 Quick recall We recall here
Additioal Notes o Power Series Mauela Girotti MATH 37-0 Advaced Calculus of oe variable Cotets Quick recall 2 Abel s Theorem 2 3 Differetiatio ad Itegratio of Power series 4 Quick recall We recall here
Question1 Multiple choices (circle the most appropriate one):
:") Philadelphia Uiversity Studet Name: Faculty of Egieerig Studet Number: Dept. of Computer Egieerig Fial Exam, First Semester: 2014/2015 Course Title: Digital Sigal Aalysis ad Processig Date: 01/02/2015
Philadelphia Uiversity Studet Name: Faculty of Egieerig Studet Number: Dept. of Computer Egieerig Fial Exam, First Semester: 2014/2015 Course Title: Digital Sigal Aalysis ad Processig Date: 01/02/2015
6.3 Testing Series With Positive Terms
 6.3. TESTING SERIES WITH POSITIVE TERMS 307 6.3 Testig Series With Positive Terms 6.3. Review of what is kow up to ow I theory, testig a series a i for covergece amouts to fidig the i= sequece of partial
6.3. TESTING SERIES WITH POSITIVE TERMS 307 6.3 Testig Series With Positive Terms 6.3. Review of what is kow up to ow I theory, testig a series a i for covergece amouts to fidig the i= sequece of partial
Discrete-Time Signals and Systems. Signals and Systems. Digital Signals. Discrete-Time Signals. Operations on Sequences: Basic Operations
 -6.3 Digital Sigal Processig ad Filterig..8 Discrete-ime Sigals ad Systems ime-domai Represetatios of Discrete-ime Sigals ad Systems ime-domai represetatio of a discrete-time sigal as a sequece of umbers
-6.3 Digital Sigal Processig ad Filterig..8 Discrete-ime Sigals ad Systems ime-domai Represetatios of Discrete-ime Sigals ad Systems ime-domai represetatio of a discrete-time sigal as a sequece of umbers
x a x a Lecture 2 Series (See Chapter 1 in Boas)
") Lecture Series (See Chapter i Boas) A basic ad very powerful (if pedestria, recall we are lazy AD smart) way to solve ay differetial (or itegral) equatio is via a series expasio of the correspodig solutio
Lecture Series (See Chapter i Boas) A basic ad very powerful (if pedestria, recall we are lazy AD smart) way to solve ay differetial (or itegral) equatio is via a series expasio of the correspodig solutio
Ch3 Discrete Time Fourier Transform
 Ch3 Discrete Time Fourier Trasform 3. Show that the DTFT of [] is give by ( k). e k 3. Determie the DTFT of the two sided sigal y [ ],. 3.3 Determie the DTFT of the causal sequece x[ ] A cos( 0 ) [ ],
Ch3 Discrete Time Fourier Trasform 3. Show that the DTFT of [] is give by ( k). e k 3. Determie the DTFT of the two sided sigal y [ ],. 3.3 Determie the DTFT of the causal sequece x[ ] A cos( 0 ) [ ],
Chapter 1. Complex Numbers. Dr. Pulak Sahoo
 Chapter 1 Complex Numbers BY Dr. Pulak Sahoo Assistat Professor Departmet of Mathematics Uiversity Of Kalyai West Begal, Idia E-mail : sahoopulak1@gmail.com 1 Module-2: Stereographic Projectio 1 Euler
Chapter 1 Complex Numbers BY Dr. Pulak Sahoo Assistat Professor Departmet of Mathematics Uiversity Of Kalyai West Begal, Idia E-mail : sahoopulak1@gmail.com 1 Module-2: Stereographic Projectio 1 Euler
Fall 2011, EE123 Digital Signal Processing
 Lecture 5 Miki Lustig, UCB September 14, 211 Miki Lustig, UCB Motivatios for Discrete Fourier Trasform Sampled represetatio i time ad frequecy umerical Fourier aalysis requires a Fourier represetatio that
Lecture 5 Miki Lustig, UCB September 14, 211 Miki Lustig, UCB Motivatios for Discrete Fourier Trasform Sampled represetatio i time ad frequecy umerical Fourier aalysis requires a Fourier represetatio that
MATH4822E FOURIER ANALYSIS AND ITS APPLICATIONS
 MATH48E FOURIER ANALYSIS AND ITS APPLICATIONS 7.. Cesàro summability. 7. Summability methods Arithmetic meas. The followig idea is due to the Italia geometer Eresto Cesàro (859-96). He shows that eve if
MATH48E FOURIER ANALYSIS AND ITS APPLICATIONS 7.. Cesàro summability. 7. Summability methods Arithmetic meas. The followig idea is due to the Italia geometer Eresto Cesàro (859-96). He shows that eve if
APPENDIX F Complex Numbers
 APPENDIX F Complex Numbers Operatios with Complex Numbers Complex Solutios of Quadratic Equatios Polar Form of a Complex Number Powers ad Roots of Complex Numbers Operatios with Complex Numbers Some equatios
APPENDIX F Complex Numbers Operatios with Complex Numbers Complex Solutios of Quadratic Equatios Polar Form of a Complex Number Powers ad Roots of Complex Numbers Operatios with Complex Numbers Some equatios
Dynamic Response of Linear Systems
 Dyamic Respose of Liear Systems Liear System Respose Superpositio Priciple Resposes to Specific Iputs Dyamic Respose of st Order Systems Characteristic Equatio - Free Respose Stable st Order System Respose
Dyamic Respose of Liear Systems Liear System Respose Superpositio Priciple Resposes to Specific Iputs Dyamic Respose of st Order Systems Characteristic Equatio - Free Respose Stable st Order System Respose
Definition 4.2. (a) A sequence {x n } in a Banach space X is a basis for X if. unique scalars a n (x) such that x = n. a n (x) x n. (4.
 A sequence {x n } in a Banach space X is a basis for X if. unique scalars a n (x) such that x = n. a n (x) x n. (4.") 4. BASES I BAACH SPACES 39 4. BASES I BAACH SPACES Sice a Baach space X is a vector space, it must possess a Hamel, or vector space, basis, i.e., a subset {x γ } γ Γ whose fiite liear spa is all of X ad
4. BASES I BAACH SPACES 39 4. BASES I BAACH SPACES Sice a Baach space X is a vector space, it must possess a Hamel, or vector space, basis, i.e., a subset {x γ } γ Γ whose fiite liear spa is all of X ad
Solutions to Homework 1
 Solutios to Homework MATH 36. Describe geometrically the sets of poits z i the complex plae defied by the followig relatios /z = z () Re(az + b) >, where a, b (2) Im(z) = c, with c (3) () = = z z = z 2.
Solutios to Homework MATH 36. Describe geometrically the sets of poits z i the complex plae defied by the followig relatios /z = z () Re(az + b) >, where a, b (2) Im(z) = c, with c (3) () = = z z = z 2.
Signals and Systems. Problem Set: From Continuous-Time to Discrete-Time
 Sigals ad Systems Problem Set: From Cotiuous-Time to Discrete-Time Updated: October 5, 2017 Problem Set Problem 1 - Liearity ad Time-Ivariace Cosider the followig systems ad determie whether liearity ad
Sigals ad Systems Problem Set: From Cotiuous-Time to Discrete-Time Updated: October 5, 2017 Problem Set Problem 1 - Liearity ad Time-Ivariace Cosider the followig systems ad determie whether liearity ad
Chapter 8. DFT : The Discrete Fourier Transform
 Chapter 8 DFT : The Discrete Fourier Trasform Roots of Uity Defiitio: A th root of uity is a complex umber x such that x The th roots of uity are: ω, ω,, ω - where ω e π /. Proof: (ω ) (e π / ) (e π )
Chapter 8 DFT : The Discrete Fourier Trasform Roots of Uity Defiitio: A th root of uity is a complex umber x such that x The th roots of uity are: ω, ω,, ω - where ω e π /. Proof: (ω ) (e π / ) (e π )
Ma 530 Infinite Series I
 Ma 50 Ifiite Series I Please ote that i additio to the material below this lecture icorporated material from the Visual Calculus web site. The material o sequeces is at Visual Sequeces. (To use this li
Ma 50 Ifiite Series I Please ote that i additio to the material below this lecture icorporated material from the Visual Calculus web site. The material o sequeces is at Visual Sequeces. (To use this li
Lecture Notes for Analysis Class
 Lecture Notes for Aalysis Class Topological Spaces A topology for a set X is a collectio T of subsets of X such that: (a) X ad the empty set are i T (b) Uios of elemets of T are i T (c) Fiite itersectios
Lecture Notes for Aalysis Class Topological Spaces A topology for a set X is a collectio T of subsets of X such that: (a) X ad the empty set are i T (b) Uios of elemets of T are i T (c) Fiite itersectios
Discrete-Time Signals and Systems. Discrete-Time Signals and Systems. Signal Symmetry. Elementary Discrete-Time Signals.
 Discrete-ime Sigals ad Systems Discrete-ime Sigals ad Systems Dr. Deepa Kudur Uiversity of oroto Referece: Sectios. -.5 of Joh G. Proakis ad Dimitris G. Maolakis, Digital Sigal Processig: Priciples, Algorithms,
Discrete-ime Sigals ad Systems Discrete-ime Sigals ad Systems Dr. Deepa Kudur Uiversity of oroto Referece: Sectios. -.5 of Joh G. Proakis ad Dimitris G. Maolakis, Digital Sigal Processig: Priciples, Algorithms,
CALCULUS BASIC SUMMER REVIEW
 CALCULUS BASIC SUMMER REVIEW NAME rise y y y Slope of a o vertical lie: m ru Poit Slope Equatio: y y m( ) The slope is m ad a poit o your lie is, ). ( y Slope-Itercept Equatio: y m b slope= m y-itercept=
CALCULUS BASIC SUMMER REVIEW NAME rise y y y Slope of a o vertical lie: m ru Poit Slope Equatio: y y m( ) The slope is m ad a poit o your lie is, ). ( y Slope-Itercept Equatio: y m b slope= m y-itercept=
Filter banks. Separately, the lowpass and highpass filters are not invertible. removes the highest frequency 1/ 2and
 Filter bas Separately, the lowpass ad highpass filters are ot ivertible T removes the highest frequecy / ad removes the lowest frequecy Together these filters separate the sigal ito low-frequecy ad high-frequecy
Filter bas Separately, the lowpass ad highpass filters are ot ivertible T removes the highest frequecy / ad removes the lowest frequecy Together these filters separate the sigal ito low-frequecy ad high-frequecy
Mathematical Methods for Physics and Engineering
 Mathematical Methods for Physics ad Egieerig Lecture otes Sergei V. Shabaov Departmet of Mathematics, Uiversity of Florida, Gaiesville, FL 326 USA CHAPTER The theory of covergece. Numerical sequeces..
Mathematical Methods for Physics ad Egieerig Lecture otes Sergei V. Shabaov Departmet of Mathematics, Uiversity of Florida, Gaiesville, FL 326 USA CHAPTER The theory of covergece. Numerical sequeces..
Sequences. Notation. Convergence of a Sequence
 Sequeces A sequece is essetially just a list. Defiitio (Sequece of Real Numbers). A sequece of real umbers is a fuctio Z (, ) R for some real umber. Do t let the descriptio of the domai cofuse you; it
Sequeces A sequece is essetially just a list. Defiitio (Sequece of Real Numbers). A sequece of real umbers is a fuctio Z (, ) R for some real umber. Do t let the descriptio of the domai cofuse you; it
Describing Function: An Approximate Analysis Method
 Describig Fuctio: A Approximate Aalysis Method his chapter presets a method for approximately aalyzig oliear dyamical systems A closed-form aalytical solutio of a oliear dyamical system (eg, a oliear differetial
Describig Fuctio: A Approximate Aalysis Method his chapter presets a method for approximately aalyzig oliear dyamical systems A closed-form aalytical solutio of a oliear dyamical system (eg, a oliear differetial
Chapter 6 Overview: Sequences and Numerical Series. For the purposes of AP, this topic is broken into four basic subtopics:
 Chapter 6 Overview: Sequeces ad Numerical Series I most texts, the topic of sequeces ad series appears, at first, to be a side topic. There are almost o derivatives or itegrals (which is what most studets
Chapter 6 Overview: Sequeces ad Numerical Series I most texts, the topic of sequeces ad series appears, at first, to be a side topic. There are almost o derivatives or itegrals (which is what most studets
ADVANCED DIGITAL SIGNAL PROCESSING
 ADVANCED DIGITAL SIGNAL PROCESSING PROF. S. C. CHAN (email : sccha@eee.hku.hk, Rm. CYC-702) DISCRETE-TIME SIGNALS AND SYSTEMS MULTI-DIMENSIONAL SIGNALS AND SYSTEMS RANDOM PROCESSES AND APPLICATIONS ADAPTIVE
ADVANCED DIGITAL SIGNAL PROCESSING PROF. S. C. CHAN (email : sccha@eee.hku.hk, Rm. CYC-702) DISCRETE-TIME SIGNALS AND SYSTEMS MULTI-DIMENSIONAL SIGNALS AND SYSTEMS RANDOM PROCESSES AND APPLICATIONS ADAPTIVE
Ma 530 Introduction to Power Series
 Ma 530 Itroductio to Power Series Please ote that there is material o power series at Visual Calculus. Some of this material was used as part of the presetatio of the topics that follow. What is a Power
Ma 530 Itroductio to Power Series Please ote that there is material o power series at Visual Calculus. Some of this material was used as part of the presetatio of the topics that follow. What is a Power
Chapter 7: Numerical Series
 Chapter 7: Numerical Series Chapter 7 Overview: Sequeces ad Numerical Series I most texts, the topic of sequeces ad series appears, at first, to be a side topic. There are almost o derivatives or itegrals
Chapter 7: Numerical Series Chapter 7 Overview: Sequeces ad Numerical Series I most texts, the topic of sequeces ad series appears, at first, to be a side topic. There are almost o derivatives or itegrals
1 1 2 = show that: over variables x and y. [2 marks] Write down necessary conditions involving first and second-order partial derivatives for ( x0, y
![1 1 2 = show that: over variables x and y. [2 marks] Write down necessary conditions involving first and second-order partial derivatives for ( x0, y](/thumbs/95/125864248.jpg "1 1 2 = show that: over variables x and y. [2 marks] Write down necessary conditions involving first and second-order partial derivatives for ( x0, y") Questio (a) A square matrix A= A is called positive defiite if the quadratic form waw > 0 for every o-zero vector w [Note: Here (.) deotes the traspose of a matrix or a vector]. Let 0 A = 0 = show that:
Questio (a) A square matrix A= A is called positive defiite if the quadratic form waw > 0 for every o-zero vector w [Note: Here (.) deotes the traspose of a matrix or a vector]. Let 0 A = 0 = show that:
MATH 31B: MIDTERM 2 REVIEW
 MATH 3B: MIDTERM REVIEW JOE HUGHES. Evaluate x (x ) (x 3).. Partial Fractios Solutio: The umerator has degree less tha the deomiator, so we ca use partial fractios. Write x (x ) (x 3) = A x + A (x ) +
MATH 3B: MIDTERM REVIEW JOE HUGHES. Evaluate x (x ) (x 3).. Partial Fractios Solutio: The umerator has degree less tha the deomiator, so we ca use partial fractios. Write x (x ) (x 3) = A x + A (x ) +
DIGITAL SIGNAL PROCESSING LECTURE 5
 DIGITAL SIGNAL PROCESSING LECTURE 5 Fll K8-5 th Semester Thir Muhmmd tmuhmmd_7@yhoo.com Cotet d Figures re from Discrete-Time Sigl Processig, e by Oppeheim, Shfer, d Buck, 999- Pretice Hll Ic. The -Trsform
DIGITAL SIGNAL PROCESSING LECTURE 5 Fll K8-5 th Semester Thir Muhmmd tmuhmmd_7@yhoo.com Cotet d Figures re from Discrete-Time Sigl Processig, e by Oppeheim, Shfer, d Buck, 999- Pretice Hll Ic. The -Trsform