COMM 602: Digital Signal Processing
|
|
|
- Darrell Anthony
- 6 years ago
- Views:
Transcription
1 COMM 60: Digital Sigal Processig Lecture 4 -Properties of LTIS Usig Z-Trasform -Iverse Z-Trasform
2 Properties of LTIS Usig Z-Trasform
3 Properties of LTIS Usig Z-Trasform -ve +ve
4 Properties of LTIS Usig Z-Trasform

5 Properties of LTIS Usig Z-Trasform

6 Example: h H h H H

7 Properties of LTIS Usig Z-Trasform
8 Check stability for the followig systems: EAMPLE : 4 4 H is ustable as it has oe pole at = ROC: causal e i respose: Impulse h h h h h h x x y y Y Y Y Y Ustable System Impulse respose icreasig Check from DE: From -domai:
9 H Check stability for the followig systems: EAMPLE : Y y 0.6 Check from DE: Y 0.6 Y 0.6 Impulse 0 h 0 h h 0.6 Y 0.6y respose: From -domai: 0.6 x is stable as it has oe pole at = 0.6 ROC: x 0.6h 0 0.6h0 0.6h i. e 0.6 causal Stable System Impulse respose decreasig
10 Check stability for the followig systems: EAMPLE 3: H y Impulse h Check from DE: 0.7y 0.7h h respose: h 0 h From -domai: 0.7 x 0.7h0 0.7h is stable as it has oe pole at = 0.7 ROC: 0. 7 causal x 0.5x h Stable System Impulse respose decreasig causal 0.84
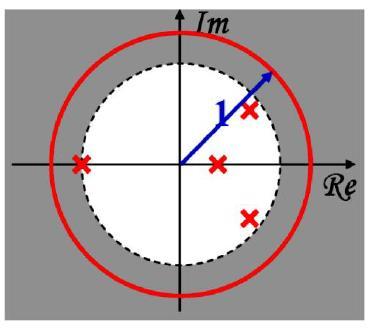
11 EAMPLE 4: A system is described by the differece equatio i the form y 0.5y x a Fid H ad check the causality ad the stability. b - Fid He jw ad the the magitude ad phase respose SOLUTION a Take the -trasform of both sides of the differece equatio Y 0.5 Y Y 0.5
12 EAMPLE 4 Cotd. H Y ROC: 0.5 i. e 0.5 Imagiary Part o Real Part Therefore, the system is causal ad stable
13 EAMPLE 4 Cotd. b To fid He jw from H, replace by e jw H jw H e 0.5 cos w j si w e H jw si jw jw cosw 0.5 j w e e 0.5 cos cos w j siw w j siw 0. 5 cos w si w cosw 0.5 si w H e jw H e jw cos w si w cosw cosw
14 EAMPLE 4 Cotd. cos w j si w e H jw si jw jw e cosw H e cosw 0.5 j w 0.5 jsiw
15 The Iverse Z Trasform Simpler methods to obtai THE INVERSE Z TRANSFORM - POWER SERIES EPANSION METHOD - PARTIAL-FRACTION METHOD
16 . POWER SERIES EPANSION METHOD Express ito a ifiite power series i -. This method is useful whe it is difficult to obtai a closed form expressio for iverse -trasform, the we fid oly the first several terms of x. EAMPLE : Fid x for =0,,, 3, 4, whe is give by : Solutio : First, rewrite as a ratio of polyomial i -, as follows:
17 EAMPLE : Cotd. Dividig the umerator by the deomiator, we have
18 That is: Thus by obtaiig the iverse -trasform, we have: x
19 EAMPLE : Obtai the values of the first 4 samples of x if: Solutio : The trasform is already i the form of power series i -. Sice has a fiite umber of terms. It correspods to a sigal of fiite legth. By ispectio All other xk values are ero x0 x x 3 x3 4
20 . POWER SERIES EPANSION METHOD Cot. Expasio of irratioal fuctios ito power series ca be obtaied from tables. Example : log a, a solutio Usig the power series expasio for : a x 0 x Thus x 0 a 0 The solutio of this problem is i Page 84; Text book
21 Example : Power series of expoetial: e 0!! 3 3!... x 3...! 3!
22 Examples of Power Series Expasio of some Fuctios
23 . PARTIAL FRACTION-EPANSION METHOD Notes: If N is the order of the umerator ad M is the order of the deomiator, the: -If N< M, divide H/, ad make the Partial fractio. -If N>=M, make log divisio ad the make partial fractio
24 . PARTIAL FRACTION-EPANSION METHOD Cotd. Cosider is give by : m a a b b b m m m m, First: Factorie the deomiator of ad fid the poles of m P P P b b b... P a P a P a m m
25 . PARTIAL FRACTION-EPANSION METHOD Cotd. The coefficiet a i are calculated as : P i i i P a For double poles at = P i i P i C P C where Geerally: p i m i r m r p d d r m C! m is max. power of the repeated poles i the problem
26 EAMPLE : Fid xk if is give by : Solutio : 0 0. We first expad / ito partial fractios as follows : The we obtai From tables we fid u, 0. u
27 EAMPLE Cotd. Hece, x u or x ; 0,,,.. I this example, if, rather tha /, is expaded ito partial fractios, The we obtai,
28 EAMPLE Cotd. Note that the iverse trasform of Z.5.5Z However, by use of the shiftig theorem we fid Also, Z Hece, u.5Z.5 x Which ca be rewritte, x u 0.,,3, is ot available from tables 0. u 0,,,... Which is the same as the result obtaied i the same example x 0 0
29 EAMPLE : Give the Z trasform Where a ad T are costats at e at e Determie the iverse Z trasform x by use of partial fractio expasio method Solutio : The partial fractio of / is foud to be Thus, e e at at
30 EAMPLE Cotd. Notig that 0,,,... ; Z 0,,,... e e Z at at The iverse trasform of is foud to be 0, u e x or,..,, e T x at at
31 EAMPLE 3 : Obtai the iverse Z trasform of 4 Solutio : 3 / 64 / / 4 6 / / 4 6 / ad,,, of values Fid the 4 4 u u u x C C B A C C B A
32 EAMPLE 4 : Cosider : Determie the iverse Z trasform x by use of partial fractio expasio method Sice the umerator is of the same degree as the deomiator we may divide the umerator by the deomiator.
33
34 EAMPLE 5 : Give = Determie the iverse Z trasform x by use of partial fractio expasio method
35
36 EAMPLE 6 : a b c 0 Give =, b b a 4ac Determie the iverse Z trasform x by use of partial fractio expasio method
37 0.707
Z - Transform. It offers the techniques for digital filter design and frequency analysis of digital signals.
 Z - Trasform The -trasform is a very importat tool i describig ad aalyig digital systems. It offers the techiques for digital filter desig ad frequecy aalysis of digital sigals. Defiitio of -trasform:
Z - Trasform The -trasform is a very importat tool i describig ad aalyig digital systems. It offers the techiques for digital filter desig ad frequecy aalysis of digital sigals. Defiitio of -trasform:
The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j
![The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j](/thumbs/82/85448534.jpg "The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j") The -Trasform 7. Itroductio Geeralie the complex siusoidal represetatio offered by DTFT to a represetatio of complex expoetial sigals. Obtai more geeral characteristics for discrete-time LTI systems. 7.
The -Trasform 7. Itroductio Geeralie the complex siusoidal represetatio offered by DTFT to a represetatio of complex expoetial sigals. Obtai more geeral characteristics for discrete-time LTI systems. 7.
Curve Sketching Handout #5 Topic Interpretation Rational Functions
 Curve Sketchig Hadout #5 Topic Iterpretatio Ratioal Fuctios A ratioal fuctio is a fuctio f that is a quotiet of two polyomials. I other words, p ( ) ( ) f is a ratioal fuctio if p ( ) ad q ( ) are polyomials
Curve Sketchig Hadout #5 Topic Iterpretatio Ratioal Fuctios A ratioal fuctio is a fuctio f that is a quotiet of two polyomials. I other words, p ( ) ( ) f is a ratioal fuctio if p ( ) ad q ( ) are polyomials
3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,
![3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,](/thumbs/82/85448051.jpg "3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,") 3. Z Trasform Referece: Etire Chapter 3 of text. Recall that the Fourier trasform (FT) of a DT sigal x [ ] is ω ( ) [ ] X e = j jω k = xe I order for the FT to exist i the fiite magitude sese, S = x [
3. Z Trasform Referece: Etire Chapter 3 of text. Recall that the Fourier trasform (FT) of a DT sigal x [ ] is ω ( ) [ ] X e = j jω k = xe I order for the FT to exist i the fiite magitude sese, S = x [
EE Midterm Test 1 - Solutions
 EE35 - Midterm Test - Solutios Total Poits: 5+ 6 Bous Poits Time: hour. ( poits) Cosider the parallel itercoectio of the two causal systems, System ad System 2, show below. System x[] + y[] System 2 The
EE35 - Midterm Test - Solutios Total Poits: 5+ 6 Bous Poits Time: hour. ( poits) Cosider the parallel itercoectio of the two causal systems, System ad System 2, show below. System x[] + y[] System 2 The
Lecture 3. Digital Signal Processing. Chapter 3. z-transforms. Mikael Swartling Nedelko Grbic Bengt Mandersson. rev. 2016
 Lecture 3 Digital Sigal Processig Chapter 3 z-trasforms Mikael Swartlig Nedelko Grbic Begt Madersso rev. 06 Departmet of Electrical ad Iformatio Techology Lud Uiversity z-trasforms We defie the z-trasform
Lecture 3 Digital Sigal Processig Chapter 3 z-trasforms Mikael Swartlig Nedelko Grbic Begt Madersso rev. 06 Departmet of Electrical ad Iformatio Techology Lud Uiversity z-trasforms We defie the z-trasform
6.003 Homework #3 Solutions
 6.00 Homework # Solutios Problems. Complex umbers a. Evaluate the real ad imagiary parts of j j. π/ Real part = Imagiary part = 0 e Euler s formula says that j = e jπ/, so jπ/ j π/ j j = e = e. Thus the
6.00 Homework # Solutios Problems. Complex umbers a. Evaluate the real ad imagiary parts of j j. π/ Real part = Imagiary part = 0 e Euler s formula says that j = e jπ/, so jπ/ j π/ j j = e = e. Thus the
Definition of z-transform.
 - Trasforms Frequecy domai represetatios of discretetime sigals ad LTI discrete-time systems are made possible with the use of DTFT. However ot all discrete-time sigals e.g. uit step sequece are guarateed
- Trasforms Frequecy domai represetatios of discretetime sigals ad LTI discrete-time systems are made possible with the use of DTFT. However ot all discrete-time sigals e.g. uit step sequece are guarateed
Chapter 7: The z-transform. Chih-Wei Liu
 Chapter 7: The -Trasform Chih-Wei Liu Outlie Itroductio The -Trasform Properties of the Regio of Covergece Properties of the -Trasform Iversio of the -Trasform The Trasfer Fuctio Causality ad Stability
Chapter 7: The -Trasform Chih-Wei Liu Outlie Itroductio The -Trasform Properties of the Regio of Covergece Properties of the -Trasform Iversio of the -Trasform The Trasfer Fuctio Causality ad Stability
Chapter 7 z-transform
 Chapter 7 -Trasform Itroductio Trasform Uilateral Trasform Properties Uilateral Trasform Iversio of Uilateral Trasform Determiig the Frequecy Respose from Poles ad Zeros Itroductio Role i Discrete-Time
Chapter 7 -Trasform Itroductio Trasform Uilateral Trasform Properties Uilateral Trasform Iversio of Uilateral Trasform Determiig the Frequecy Respose from Poles ad Zeros Itroductio Role i Discrete-Time
Chapter 3. z-transform
 Chapter 3 -Trasform 3.0 Itroductio The -Trasform has the same role as that played by the Laplace Trasform i the cotiuous-time theorem. It is a liear operator that is useful for aalyig LTI systems such
Chapter 3 -Trasform 3.0 Itroductio The -Trasform has the same role as that played by the Laplace Trasform i the cotiuous-time theorem. It is a liear operator that is useful for aalyig LTI systems such
MA Lesson 26 Notes Graphs of Rational Functions (Asymptotes) Limits at infinity
 Limits at infinity") MA 1910 Lesso 6 Notes Graphs of Ratioal Fuctios (Asymptotes) Limits at ifiity Defiitio of a Ratioal Fuctio: If P() ad Q() are both polyomial fuctios, Q() 0, the the fuctio f below is called a Ratioal Fuctio.
MA 1910 Lesso 6 Notes Graphs of Ratioal Fuctios (Asymptotes) Limits at ifiity Defiitio of a Ratioal Fuctio: If P() ad Q() are both polyomial fuctios, Q() 0, the the fuctio f below is called a Ratioal Fuctio.
Generalizing the DTFT. The z Transform. Complex Exponential Excitation. The Transfer Function. Systems Described by Difference Equations
 Geeraliig the DTFT The Trasform M. J. Roberts - All Rights Reserved. Edited by Dr. Robert Akl 1 The forward DTFT is defied by X e jω = x e jω i which = Ω is discrete-time radia frequecy, a real variable.
Geeraliig the DTFT The Trasform M. J. Roberts - All Rights Reserved. Edited by Dr. Robert Akl 1 The forward DTFT is defied by X e jω = x e jω i which = Ω is discrete-time radia frequecy, a real variable.
ECE-S352 Introduction to Digital Signal Processing Lecture 3A Direct Solution of Difference Equations
 ECE-S352 Itroductio to Digital Sigal Processig Lecture 3A Direct Solutio of Differece Equatios Discrete Time Systems Described by Differece Equatios Uit impulse (sample) respose h() of a DT system allows
ECE-S352 Itroductio to Digital Sigal Processig Lecture 3A Direct Solutio of Differece Equatios Discrete Time Systems Described by Differece Equatios Uit impulse (sample) respose h() of a DT system allows
Ma 530 Introduction to Power Series
 Ma 530 Itroductio to Power Series Please ote that there is material o power series at Visual Calculus. Some of this material was used as part of the presetatio of the topics that follow. What is a Power
Ma 530 Itroductio to Power Series Please ote that there is material o power series at Visual Calculus. Some of this material was used as part of the presetatio of the topics that follow. What is a Power
DIGITAL SIGNAL PROCESSING LECTURE 3
 DIGITAL SIGNAL PROCESSING LECTURE 3 Fall 2 2K8-5 th Semester Tahir Muhammad tmuhammad_7@yahoo.com Cotet ad Figures are from Discrete-Time Sigal Processig, 2e by Oppeheim, Shafer, ad Buc, 999-2 Pretice
DIGITAL SIGNAL PROCESSING LECTURE 3 Fall 2 2K8-5 th Semester Tahir Muhammad tmuhammad_7@yahoo.com Cotet ad Figures are from Discrete-Time Sigal Processig, 2e by Oppeheim, Shafer, ad Buc, 999-2 Pretice
Chapter 4 : Laplace Transform
 4. Itroductio Laplace trasform is a alterative to solve the differetial equatio by the complex frequecy domai ( s = σ + jω), istead of the usual time domai. The DE ca be easily trasformed ito a algebraic
4. Itroductio Laplace trasform is a alterative to solve the differetial equatio by the complex frequecy domai ( s = σ + jω), istead of the usual time domai. The DE ca be easily trasformed ito a algebraic
In algebra one spends much time finding common denominators and thus simplifying rational expressions. For example:
 74 The Method of Partial Fractios I algebra oe speds much time fidig commo deomiators ad thus simplifyig ratioal epressios For eample: + + + 6 5 + = + = = + + + + + ( )( ) 5 It may the seem odd to be watig
74 The Method of Partial Fractios I algebra oe speds much time fidig commo deomiators ad thus simplifyig ratioal epressios For eample: + + + 6 5 + = + = = + + + + + ( )( ) 5 It may the seem odd to be watig
PROBLEM SET 5 SOLUTIONS 126 = , 37 = , 15 = , 7 = 7 1.
 Math 7 Sprig 06 PROBLEM SET 5 SOLUTIONS Notatios. Give a real umber x, we will defie sequeces (a k ), (x k ), (p k ), (q k ) as i lecture.. (a) (5 pts) Fid the simple cotiued fractio represetatios of 6
Math 7 Sprig 06 PROBLEM SET 5 SOLUTIONS Notatios. Give a real umber x, we will defie sequeces (a k ), (x k ), (p k ), (q k ) as i lecture.. (a) (5 pts) Fid the simple cotiued fractio represetatios of 6
Appendix: The Laplace Transform
 Appedix: The Laplace Trasform The Laplace trasform is a powerful method that ca be used to solve differetial equatio, ad other mathematical problems. Its stregth lies i the fact that it allows the trasformatio
Appedix: The Laplace Trasform The Laplace trasform is a powerful method that ca be used to solve differetial equatio, ad other mathematical problems. Its stregth lies i the fact that it allows the trasformatio
The Z-Transform. (t-t 0 ) Figure 1: Simplified graph of an impulse function. For an impulse, it can be shown that (1)
 Figure 1: Simplified graph of an impulse function. For an impulse, it can be shown that (1)") The Z-Trasform Sampled Data The geeralied fuctio (t) (also kow as the impulse fuctio) is useful i the defiitio ad aalysis of sampled-data sigals. Figure below shows a simplified graph of a impulse. (t-t
The Z-Trasform Sampled Data The geeralied fuctio (t) (also kow as the impulse fuctio) is useful i the defiitio ad aalysis of sampled-data sigals. Figure below shows a simplified graph of a impulse. (t-t
Ch3 Discrete Time Fourier Transform
 Ch3 Discrete Time Fourier Trasform 3. Show that the DTFT of [] is give by ( k). e k 3. Determie the DTFT of the two sided sigal y [ ],. 3.3 Determie the DTFT of the causal sequece x[ ] A cos( 0 ) [ ],
Ch3 Discrete Time Fourier Trasform 3. Show that the DTFT of [] is give by ( k). e k 3. Determie the DTFT of the two sided sigal y [ ],. 3.3 Determie the DTFT of the causal sequece x[ ] A cos( 0 ) [ ],
Introduction to Signals and Systems, Part V: Lecture Summary
 EEL33: Discrete-Time Sigals ad Systems Itroductio to Sigals ad Systems, Part V: Lecture Summary Itroductio to Sigals ad Systems, Part V: Lecture Summary So far we have oly looked at examples of o-recursive
EEL33: Discrete-Time Sigals ad Systems Itroductio to Sigals ad Systems, Part V: Lecture Summary Itroductio to Sigals ad Systems, Part V: Lecture Summary So far we have oly looked at examples of o-recursive
The z-transform can be used to obtain compact transform-domain representations of signals and systems. It
 3 4 5 6 7 8 9 10 CHAPTER 3 11 THE Z-TRANSFORM 31 INTRODUCTION The z-trasform ca be used to obtai compact trasform-domai represetatios of sigals ad systems It provides ituitio particularly i LTI system
3 4 5 6 7 8 9 10 CHAPTER 3 11 THE Z-TRANSFORM 31 INTRODUCTION The z-trasform ca be used to obtai compact trasform-domai represetatios of sigals ad systems It provides ituitio particularly i LTI system
MATH 31B: MIDTERM 2 REVIEW
 MATH 3B: MIDTERM REVIEW JOE HUGHES. Evaluate x (x ) (x 3).. Partial Fractios Solutio: The umerator has degree less tha the deomiator, so we ca use partial fractios. Write x (x ) (x 3) = A x + A (x ) +
MATH 3B: MIDTERM REVIEW JOE HUGHES. Evaluate x (x ) (x 3).. Partial Fractios Solutio: The umerator has degree less tha the deomiator, so we ca use partial fractios. Write x (x ) (x 3) = A x + A (x ) +
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science. BACKGROUND EXAM September 30, 2004.
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Departmet of Electrical Egieerig ad Computer Sciece 6.34 Discrete Time Sigal Processig Fall 24 BACKGROUND EXAM September 3, 24. Full Name: Note: This exam is closed
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Departmet of Electrical Egieerig ad Computer Sciece 6.34 Discrete Time Sigal Processig Fall 24 BACKGROUND EXAM September 3, 24. Full Name: Note: This exam is closed
CHAPTER 1 SEQUENCES AND INFINITE SERIES
 CHAPTER SEQUENCES AND INFINITE SERIES SEQUENCES AND INFINITE SERIES (0 meetigs) Sequeces ad limit of a sequece Mootoic ad bouded sequece Ifiite series of costat terms Ifiite series of positive terms Alteratig
CHAPTER SEQUENCES AND INFINITE SERIES SEQUENCES AND INFINITE SERIES (0 meetigs) Sequeces ad limit of a sequece Mootoic ad bouded sequece Ifiite series of costat terms Ifiite series of positive terms Alteratig
University of California at Berkeley College of Engineering Department of Electrical Engineering and Computer Sciences
 A Uiversity of Califoria at Berkeley College of Egieerig Departmet of Electrical Egieerig ad Computer Scieces U N I V E R S T H E I T Y O F LE T TH E R E B E LI G H T C A L I F O R N 8 6 8 I A EECS : Sigals
A Uiversity of Califoria at Berkeley College of Egieerig Departmet of Electrical Egieerig ad Computer Scieces U N I V E R S T H E I T Y O F LE T TH E R E B E LI G H T C A L I F O R N 8 6 8 I A EECS : Sigals
Section 11.8: Power Series
 Sectio 11.8: Power Series 1. Power Series I this sectio, we cosider geeralizig the cocept of a series. Recall that a series is a ifiite sum of umbers a. We ca talk about whether or ot it coverges ad i
Sectio 11.8: Power Series 1. Power Series I this sectio, we cosider geeralizig the cocept of a series. Recall that a series is a ifiite sum of umbers a. We ca talk about whether or ot it coverges ad i
The z transform is the discrete-time counterpart of the Laplace transform. Other description: see page 553, textbook.
 The -Trasform 7. Itroductio The trasform is the discrete-time couterpart of the Laplace trasform. Other descriptio: see page 553, textbook. 7. The -trasform Derivatio of the -trasform: x[] re jω LTI system,
The -Trasform 7. Itroductio The trasform is the discrete-time couterpart of the Laplace trasform. Other descriptio: see page 553, textbook. 7. The -trasform Derivatio of the -trasform: x[] re jω LTI system,
3 Gauss map and continued fractions
 ICTP, Trieste, July 08 Gauss map ad cotiued fractios I this lecture we will itroduce the Gauss map, which is very importat for its coectio with cotiued fractios i umber theory. The Gauss map G : [0, ]
ICTP, Trieste, July 08 Gauss map ad cotiued fractios I this lecture we will itroduce the Gauss map, which is very importat for its coectio with cotiued fractios i umber theory. The Gauss map G : [0, ]
FIR Filter Design: Part II
 EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we cosider how we might go about desigig FIR filters with arbitrary frequecy resposes, through compositio of multiple sigle-peak
EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we cosider how we might go about desigig FIR filters with arbitrary frequecy resposes, through compositio of multiple sigle-peak
Signals and Systems. Problem Set: From Continuous-Time to Discrete-Time
 Sigals ad Systems Problem Set: From Cotiuous-Time to Discrete-Time Updated: October 5, 2017 Problem Set Problem 1 - Liearity ad Time-Ivariace Cosider the followig systems ad determie whether liearity ad
Sigals ad Systems Problem Set: From Cotiuous-Time to Discrete-Time Updated: October 5, 2017 Problem Set Problem 1 - Liearity ad Time-Ivariace Cosider the followig systems ad determie whether liearity ad
Series: Infinite Sums
 Series: Ifiite Sums Series are a way to mae sese of certai types of ifiitely log sums. We will eed to be able to do this if we are to attai our goal of approximatig trascedetal fuctios by usig ifiite degree
Series: Ifiite Sums Series are a way to mae sese of certai types of ifiitely log sums. We will eed to be able to do this if we are to attai our goal of approximatig trascedetal fuctios by usig ifiite degree
Digital Signal Processing
 Digital Sigal Processig Z-trasform dftwave -Trasform Backgroud-Defiitio - Fourier trasform j ω j ω e x e extracts the essece of x but is limited i the sese that it ca hadle stable systems oly. jω e coverges
Digital Sigal Processig Z-trasform dftwave -Trasform Backgroud-Defiitio - Fourier trasform j ω j ω e x e extracts the essece of x but is limited i the sese that it ca hadle stable systems oly. jω e coverges
Unit 4: Polynomial and Rational Functions
 48 Uit 4: Polyomial ad Ratioal Fuctios Polyomial Fuctios A polyomial fuctio y px ( ) is a fuctio of the form p( x) ax + a x + a x +... + ax + ax+ a 1 1 1 0 where a, a 1,..., a, a1, a0are real costats ad
48 Uit 4: Polyomial ad Ratioal Fuctios Polyomial Fuctios A polyomial fuctio y px ( ) is a fuctio of the form p( x) ax + a x + a x +... + ax + ax+ a 1 1 1 0 where a, a 1,..., a, a1, a0are real costats ad
Solutions of Chapter 5 Part 1/2
 Page 1 of 8 Solutios of Chapter 5 Part 1/2 Problem 5.1-1 Usig the defiitio, compute the -trasform of x[] ( 1) (u[] u[ 8]). Sketch the poles ad eros of X[] i the plae. Solutio: Accordig to the defiitio,
Page 1 of 8 Solutios of Chapter 5 Part 1/2 Problem 5.1-1 Usig the defiitio, compute the -trasform of x[] ( 1) (u[] u[ 8]). Sketch the poles ad eros of X[] i the plae. Solutio: Accordig to the defiitio,
FIR Filters. Lecture #7 Chapter 5. BME 310 Biomedical Computing - J.Schesser
 FIR Filters Lecture #7 Chapter 5 8 What Is this Course All About? To Gai a Appreciatio of the Various Types of Sigals ad Systems To Aalyze The Various Types of Systems To Lear the Skills ad Tools eeded
FIR Filters Lecture #7 Chapter 5 8 What Is this Course All About? To Gai a Appreciatio of the Various Types of Sigals ad Systems To Aalyze The Various Types of Systems To Lear the Skills ad Tools eeded
Question1 Multiple choices (circle the most appropriate one):
:") Philadelphia Uiversity Studet Name: Faculty of Egieerig Studet Number: Dept. of Computer Egieerig Fial Exam, First Semester: 2014/2015 Course Title: Digital Sigal Aalysis ad Processig Date: 01/02/2015
Philadelphia Uiversity Studet Name: Faculty of Egieerig Studet Number: Dept. of Computer Egieerig Fial Exam, First Semester: 2014/2015 Course Title: Digital Sigal Aalysis ad Processig Date: 01/02/2015
3.2 Properties of Division 3.3 Zeros of Polynomials 3.4 Complex and Rational Zeros of Polynomials
 Math 60 www.timetodare.com 3. Properties of Divisio 3.3 Zeros of Polyomials 3.4 Complex ad Ratioal Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered
Math 60 www.timetodare.com 3. Properties of Divisio 3.3 Zeros of Polyomials 3.4 Complex ad Ratioal Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered
Linear time invariant systems
 Liear time ivariat systems Alejadro Ribeiro Dept. of Electrical ad Systems Egieerig Uiversity of Pesylvaia aribeiro@seas.upe.edu http://www.seas.upe.edu/users/~aribeiro/ February 25, 2016 Sigal ad Iformatio
Liear time ivariat systems Alejadro Ribeiro Dept. of Electrical ad Systems Egieerig Uiversity of Pesylvaia aribeiro@seas.upe.edu http://www.seas.upe.edu/users/~aribeiro/ February 25, 2016 Sigal ad Iformatio
Find a formula for the exponential function whose graph is given , 1 2,16 1, 6
 Math 4 Activity (Due by EOC Apr. ) Graph the followig epoetial fuctios by modifyig the graph of f. Fid the rage of each fuctio.. g. g. g 4. g. g 6. g Fid a formula for the epoetial fuctio whose graph is
Math 4 Activity (Due by EOC Apr. ) Graph the followig epoetial fuctios by modifyig the graph of f. Fid the rage of each fuctio.. g. g. g 4. g. g 6. g Fid a formula for the epoetial fuctio whose graph is
Signal Processing. Lecture 02: Discrete Time Signals and Systems. Ahmet Taha Koru, Ph. D. Yildiz Technical University.
 Sigal Processig Lecture 02: Discrete Time Sigals ad Systems Ahmet Taha Koru, Ph. D. Yildiz Techical Uiversity 2017-2018 Fall ATK (YTU) Sigal Processig 2017-2018 Fall 1 / 51 Discrete Time Sigals Discrete
Sigal Processig Lecture 02: Discrete Time Sigals ad Systems Ahmet Taha Koru, Ph. D. Yildiz Techical Uiversity 2017-2018 Fall ATK (YTU) Sigal Processig 2017-2018 Fall 1 / 51 Discrete Time Sigals Discrete
CEMTool Tutorial. The z-transform
 CEMTool Tutorial The -Trasform Overview This tutorial is part of the CEMWARE series. Each tutorial i this series will teach you a specific topic of commo applicatios by explaiig theoretical cocepts ad
CEMTool Tutorial The -Trasform Overview This tutorial is part of the CEMWARE series. Each tutorial i this series will teach you a specific topic of commo applicatios by explaiig theoretical cocepts ad
Math 475, Problem Set #12: Answers
 Math 475, Problem Set #12: Aswers A. Chapter 8, problem 12, parts (b) ad (d). (b) S # (, 2) = 2 2, sice, from amog the 2 ways of puttig elemets ito 2 distiguishable boxes, exactly 2 of them result i oe
Math 475, Problem Set #12: Aswers A. Chapter 8, problem 12, parts (b) ad (d). (b) S # (, 2) = 2 2, sice, from amog the 2 ways of puttig elemets ito 2 distiguishable boxes, exactly 2 of them result i oe
MAT 271 Project: Partial Fractions for certain rational functions
 MAT 7 Project: Partial Fractios for certai ratioal fuctios Prerequisite kowledge: partial fractios from MAT 7, a very good commad of factorig ad complex umbers from Precalculus. To complete this project,
MAT 7 Project: Partial Fractios for certai ratioal fuctios Prerequisite kowledge: partial fractios from MAT 7, a very good commad of factorig ad complex umbers from Precalculus. To complete this project,
Created by T. Madas SERIES. Created by T. Madas
 SERIES SUMMATIONS BY STANDARD RESULTS Questio (**) Use stadard results o summatios to fid the value of 48 ( r )( 3r ). 36 FP-B, 66638 Questio (**+) Fid, i fully simplified factorized form, a expressio
SERIES SUMMATIONS BY STANDARD RESULTS Questio (**) Use stadard results o summatios to fid the value of 48 ( r )( 3r ). 36 FP-B, 66638 Questio (**+) Fid, i fully simplified factorized form, a expressio
Frequency Response of FIR Filters
 EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we itroduce the idea of the frequecy respose of LTI systems, ad focus specifically o the frequecy respose of FIR filters.. Steady-state
EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we itroduce the idea of the frequecy respose of LTI systems, ad focus specifically o the frequecy respose of FIR filters.. Steady-state
Solution of Linear Constant-Coefficient Difference Equations
 ECE 38-9 Solutio of Liear Costat-Coefficiet Differece Equatios Z. Aliyazicioglu Electrical ad Computer Egieerig Departmet Cal Poly Pomoa Solutio of Liear Costat-Coefficiet Differece Equatios Example: Determie
ECE 38-9 Solutio of Liear Costat-Coefficiet Differece Equatios Z. Aliyazicioglu Electrical ad Computer Egieerig Departmet Cal Poly Pomoa Solutio of Liear Costat-Coefficiet Differece Equatios Example: Determie
x[0] x[1] x[2] Figure 2.1 Graphical representation of a discrete-time signal.
![x[0] x[1] x[2] Figure 2.1 Graphical representation of a discrete-time signal.](/thumbs/83/88911754.jpg "x[0] x[1] x[2] Figure 2.1 Graphical representation of a discrete-time signal.") x[ ] x[ ] x[] x[] x[] x[] 9 8 7 6 5 4 3 3 4 5 6 7 8 9 Figure. Graphical represetatio of a discrete-time sigal. From Discrete-Time Sigal Processig, e by Oppeheim, Schafer, ad Buck 999- Pretice Hall, Ic.
x[ ] x[ ] x[] x[] x[] x[] 9 8 7 6 5 4 3 3 4 5 6 7 8 9 Figure. Graphical represetatio of a discrete-time sigal. From Discrete-Time Sigal Processig, e by Oppeheim, Schafer, ad Buck 999- Pretice Hall, Ic.
LESSON 2: SIMPLIFYING RADICALS
 High School: Workig with Epressios LESSON : SIMPLIFYING RADICALS N.RN.. C N.RN.. B 5 5 C t t t t t E a b a a b N.RN.. 4 6 N.RN. 4. N.RN. 5. N.RN. 6. 7 8 N.RN. 7. A 7 N.RN. 8. 6 80 448 4 5 6 48 00 6 6 6
High School: Workig with Epressios LESSON : SIMPLIFYING RADICALS N.RN.. C N.RN.. B 5 5 C t t t t t E a b a a b N.RN.. 4 6 N.RN. 4. N.RN. 5. N.RN. 6. 7 8 N.RN. 7. A 7 N.RN. 8. 6 80 448 4 5 6 48 00 6 6 6
Quiz. Use either the RATIO or ROOT TEST to determine whether the series is convergent or not.
 Quiz. Use either the RATIO or ROOT TEST to determie whether the series is coverget or ot. e .6 POWER SERIES Defiitio. A power series i about is a series of the form c 0 c a c a... c a... a 0 c a where
Quiz. Use either the RATIO or ROOT TEST to determie whether the series is coverget or ot. e .6 POWER SERIES Defiitio. A power series i about is a series of the form c 0 c a c a... c a... a 0 c a where
Solution of EECS 315 Final Examination F09
 Solutio of EECS 315 Fial Examiatio F9 1. Fid the umerical value of δ ( t + 4ramp( tdt. δ ( t + 4ramp( tdt. Fid the umerical sigal eergy of x E x = x[ ] = δ 3 = 11 = ( = ramp( ( 4 = ramp( 8 = 8 [ ] = (
Solutio of EECS 315 Fial Examiatio F9 1. Fid the umerical value of δ ( t + 4ramp( tdt. δ ( t + 4ramp( tdt. Fid the umerical sigal eergy of x E x = x[ ] = δ 3 = 11 = ( = ramp( ( 4 = ramp( 8 = 8 [ ] = (
[ 11 ] z of degree 2 as both degree 2 each. The degree of a polynomial in n variables is the maximum of the degrees of its terms.
![[ 11 ] z of degree 2 as both degree 2 each. The degree of a polynomial in n variables is the maximum of the degrees of its terms.](/thumbs/82/84777652.jpg "[ 11 ] z of degree 2 as both degree 2 each. The degree of a polynomial in n variables is the maximum of the degrees of its terms.") [ 11 ] 1 1.1 Polyomial Fuctios 1 Algebra Ay fuctio f ( x) ax a1x... a1x a0 is a polyomial fuctio if ai ( i 0,1,,,..., ) is a costat which belogs to the set of real umbers ad the idices,, 1,...,1 are atural
[ 11 ] 1 1.1 Polyomial Fuctios 1 Algebra Ay fuctio f ( x) ax a1x... a1x a0 is a polyomial fuctio if ai ( i 0,1,,,..., ) is a costat which belogs to the set of real umbers ad the idices,, 1,...,1 are atural
62. Power series Definition 16. (Power series) Given a sequence {c n }, the series. c n x n = c 0 + c 1 x + c 2 x 2 + c 3 x 3 +
 Given a sequence {c n }, the series. c n x n = c 0 + c 1 x + c 2 x 2 + c 3 x 3 +") 62. Power series Defiitio 16. (Power series) Give a sequece {c }, the series c x = c 0 + c 1 x + c 2 x 2 + c 3 x 3 + is called a power series i the variable x. The umbers c are called the coefficiets of
62. Power series Defiitio 16. (Power series) Give a sequece {c }, the series c x = c 0 + c 1 x + c 2 x 2 + c 3 x 3 + is called a power series i the variable x. The umbers c are called the coefficiets of
Signal Processing in Mechatronics. Lecture 3, Convolution, Fourier Series and Fourier Transform
 Sigal Processig i Mechatroics Summer semester, 1 Lecture 3, Covolutio, Fourier Series ad Fourier rasform Dr. Zhu K.P. AIS, UM 1 1. Covolutio Covolutio Descriptio of LI Systems he mai premise is that the
Sigal Processig i Mechatroics Summer semester, 1 Lecture 3, Covolutio, Fourier Series ad Fourier rasform Dr. Zhu K.P. AIS, UM 1 1. Covolutio Covolutio Descriptio of LI Systems he mai premise is that the
Topic 1 2: Sequences and Series. A sequence is an ordered list of numbers, e.g. 1, 2, 4, 8, 16, or
 Topic : Sequeces ad Series A sequece is a ordered list of umbers, e.g.,,, 8, 6, or,,,.... A series is a sum of the terms of a sequece, e.g. + + + 8 + 6 + or... Sigma Notatio b The otatio f ( k) is shorthad
Topic : Sequeces ad Series A sequece is a ordered list of umbers, e.g.,,, 8, 6, or,,,.... A series is a sum of the terms of a sequece, e.g. + + + 8 + 6 + or... Sigma Notatio b The otatio f ( k) is shorthad
Zeros of Polynomials
 Math 160 www.timetodare.com 4.5 4.6 Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered with fidig the solutios of polyomial equatios of ay degree
Math 160 www.timetodare.com 4.5 4.6 Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered with fidig the solutios of polyomial equatios of ay degree
Exponential Moving Average Pieter P
 Expoetial Movig Average Pieter P Differece equatio The Differece equatio of a expoetial movig average lter is very simple: y[] x[] + (1 )y[ 1] I this equatio, y[] is the curret output, y[ 1] is the previous
Expoetial Movig Average Pieter P Differece equatio The Differece equatio of a expoetial movig average lter is very simple: y[] x[] + (1 )y[ 1] I this equatio, y[] is the curret output, y[ 1] is the previous
is also known as the general term of the sequence
 Lesso : Sequeces ad Series Outlie Objectives: I ca determie whether a sequece has a patter. I ca determie whether a sequece ca be geeralized to fid a formula for the geeral term i the sequece. I ca determie
Lesso : Sequeces ad Series Outlie Objectives: I ca determie whether a sequece has a patter. I ca determie whether a sequece ca be geeralized to fid a formula for the geeral term i the sequece. I ca determie
EE / EEE SAMPLE STUDY MATERIAL. GATE, IES & PSUs Signal System. Electrical Engineering. Postal Correspondence Course
 Sigal-EE Postal Correspodece Course 1 SAMPLE STUDY MATERIAL Electrical Egieerig EE / EEE Postal Correspodece Course GATE, IES & PSUs Sigal System Sigal-EE Postal Correspodece Course CONTENTS 1. SIGNAL
Sigal-EE Postal Correspodece Course 1 SAMPLE STUDY MATERIAL Electrical Egieerig EE / EEE Postal Correspodece Course GATE, IES & PSUs Sigal System Sigal-EE Postal Correspodece Course CONTENTS 1. SIGNAL
In this section, we show how to use the integral test to decide whether a series
 Itegral Test Itegral Test Example Itegral Test Example p-series Compariso Test Example Example 2 Example 3 Example 4 Example 5 Exa Itegral Test I this sectio, we show how to use the itegral test to decide
Itegral Test Itegral Test Example Itegral Test Example p-series Compariso Test Example Example 2 Example 3 Example 4 Example 5 Exa Itegral Test I this sectio, we show how to use the itegral test to decide
ADVANCED DIGITAL SIGNAL PROCESSING
 ADVANCED DIGITAL SIGNAL PROCESSING PROF. S. C. CHAN (email : sccha@eee.hku.hk, Rm. CYC-702) DISCRETE-TIME SIGNALS AND SYSTEMS MULTI-DIMENSIONAL SIGNALS AND SYSTEMS RANDOM PROCESSES AND APPLICATIONS ADAPTIVE
ADVANCED DIGITAL SIGNAL PROCESSING PROF. S. C. CHAN (email : sccha@eee.hku.hk, Rm. CYC-702) DISCRETE-TIME SIGNALS AND SYSTEMS MULTI-DIMENSIONAL SIGNALS AND SYSTEMS RANDOM PROCESSES AND APPLICATIONS ADAPTIVE
Properties and Tests of Zeros of Polynomial Functions
 Properties ad Tests of Zeros of Polyomial Fuctios The Remaider ad Factor Theorems: Sythetic divisio ca be used to fid the values of polyomials i a sometimes easier way tha substitutio. This is show by
Properties ad Tests of Zeros of Polyomial Fuctios The Remaider ad Factor Theorems: Sythetic divisio ca be used to fid the values of polyomials i a sometimes easier way tha substitutio. This is show by
INFINITE SEQUENCES AND SERIES
 11 INFINITE SEQUENCES AND SERIES INFINITE SEQUENCES AND SERIES 11.4 The Compariso Tests I this sectio, we will lear: How to fid the value of a series by comparig it with a kow series. COMPARISON TESTS
11 INFINITE SEQUENCES AND SERIES INFINITE SEQUENCES AND SERIES 11.4 The Compariso Tests I this sectio, we will lear: How to fid the value of a series by comparig it with a kow series. COMPARISON TESTS
Solutions to Final Exam Review Problems
 . Let f(x) 4+x. Solutios to Fial Exam Review Problems Math 5C, Witer 2007 (a) Fid the Maclauri series for f(x), ad compute its radius of covergece. Solutio. f(x) 4( ( x/4)) ( x/4) ( ) 4 4 + x. Sice the
. Let f(x) 4+x. Solutios to Fial Exam Review Problems Math 5C, Witer 2007 (a) Fid the Maclauri series for f(x), ad compute its radius of covergece. Solutio. f(x) 4( ( x/4)) ( x/4) ( ) 4 4 + x. Sice the
6.003: Signals and Systems. Feedback, Poles, and Fundamental Modes
 6.003: Sigals ad Systems Feedback, Poles, ad Fudametal Modes February 9, 2010 Last Time: Multiple Represetatios of DT Systems Verbal descriptios: preserve the ratioale. To reduce the umber of bits eeded
6.003: Sigals ad Systems Feedback, Poles, ad Fudametal Modes February 9, 2010 Last Time: Multiple Represetatios of DT Systems Verbal descriptios: preserve the ratioale. To reduce the umber of bits eeded
Time-Domain Representations of LTI Systems
 2.1 Itroductio Objectives: 1. Impulse resposes of LTI systems 2. Liear costat-coefficiets differetial or differece equatios of LTI systems 3. Bloc diagram represetatios of LTI systems 4. State-variable
2.1 Itroductio Objectives: 1. Impulse resposes of LTI systems 2. Liear costat-coefficiets differetial or differece equatios of LTI systems 3. Bloc diagram represetatios of LTI systems 4. State-variable
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL OF ELECTRICAL AND COMPUTER ENGINEERING
 GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL OF ELECTRICAL AND COMPUTER ENGINEERING ECE 06 Summer 07 Problem Set #5 Assiged: Jue 3, 07 Due Date: Jue 30, 07 Readig: Chapter 5 o FIR Filters. PROBLEM 5..* (The
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL OF ELECTRICAL AND COMPUTER ENGINEERING ECE 06 Summer 07 Problem Set #5 Assiged: Jue 3, 07 Due Date: Jue 30, 07 Readig: Chapter 5 o FIR Filters. PROBLEM 5..* (The
PHYSICS 116A Homework 2 Solutions
 PHYSICS 6A Homework 2 Solutios I. [optioal] Boas, Ch., 6, Qu. 30 (proof of the ratio test). Just follow the hits. If ρ, the ratio of succcessive terms for is less tha, the hits show that the terms of the
PHYSICS 6A Homework 2 Solutios I. [optioal] Boas, Ch., 6, Qu. 30 (proof of the ratio test). Just follow the hits. If ρ, the ratio of succcessive terms for is less tha, the hits show that the terms of the
Chapter 2 Systems and Signals
 Chapter 2 Systems ad Sigals 1 Itroductio Discrete-Time Sigals: Sequeces Discrete-Time Systems Properties of Liear Time-Ivariat Systems Liear Costat-Coefficiet Differece Equatios Frequecy-Domai Represetatio
Chapter 2 Systems ad Sigals 1 Itroductio Discrete-Time Sigals: Sequeces Discrete-Time Systems Properties of Liear Time-Ivariat Systems Liear Costat-Coefficiet Differece Equatios Frequecy-Domai Represetatio
f(w) w z =R z a 0 a n a nz n Liouville s theorem, we see that Q is constant, which implies that P is constant, which is a contradiction.
 w z =R z a 0 a n a nz n Liouville s theorem, we see that Q is constant, which implies that P is constant, which is a contradiction.") Theorem 3.6.4. [Liouville s Theorem] Every bouded etire fuctio is costat. Proof. Let f be a etire fuctio. Suppose that there is M R such that M for ay z C. The for ay z C ad R > 0 f (z) f(w) 2πi (w z)
Theorem 3.6.4. [Liouville s Theorem] Every bouded etire fuctio is costat. Proof. Let f be a etire fuctio. Suppose that there is M R such that M for ay z C. The for ay z C ad R > 0 f (z) f(w) 2πi (w z)
For use only in Badminton School November 2011 C2 Note. C2 Notes (Edexcel)
") For use oly i Badmito School November 0 C Note C Notes (Edecel) Copyright www.pgmaths.co.uk - For AS, A otes ad IGCSE / GCSE worksheets For use oly i Badmito School November 0 C Note Copyright www.pgmaths.co.uk
For use oly i Badmito School November 0 C Note C Notes (Edecel) Copyright www.pgmaths.co.uk - For AS, A otes ad IGCSE / GCSE worksheets For use oly i Badmito School November 0 C Note Copyright www.pgmaths.co.uk
Roger Apéry's proof that zeta(3) is irrational
 is irrational") Cliff Bott cliffbott@hotmail.com 11 October 2011 Roger Apéry's proof that zeta(3) is irratioal Roger Apéry developed a method for searchig for cotiued fractio represetatios of umbers that have a form such
Cliff Bott cliffbott@hotmail.com 11 October 2011 Roger Apéry's proof that zeta(3) is irratioal Roger Apéry developed a method for searchig for cotiued fractio represetatios of umbers that have a form such
Physics 116A Solutions to Homework Set #1 Winter Boas, problem Use equation 1.8 to find a fraction describing
 Physics 6A Solutios to Homework Set # Witer 0. Boas, problem. 8 Use equatio.8 to fid a fractio describig 0.694444444... Start with the formula S = a, ad otice that we ca remove ay umber of r fiite decimals
Physics 6A Solutios to Homework Set # Witer 0. Boas, problem. 8 Use equatio.8 to fid a fractio describig 0.694444444... Start with the formula S = a, ad otice that we ca remove ay umber of r fiite decimals
Problem 4: Evaluate ( k ) by negating (actually un-negating) its upper index. Binomial coefficient
 by negating (actually un-negating) its upper index. Binomial coefficient") Problem 4: Evaluate by egatig actually u-egatig its upper idex We ow that Biomial coefficiet r { where r is a real umber, is a iteger The above defiitio ca be recast i terms of factorials i the commo case
Problem 4: Evaluate by egatig actually u-egatig its upper idex We ow that Biomial coefficiet r { where r is a real umber, is a iteger The above defiitio ca be recast i terms of factorials i the commo case
1 Generating functions for balls in boxes
 Math 566 Fall 05 Some otes o geeratig fuctios Give a sequece a 0, a, a,..., a,..., a geeratig fuctio some way of represetig the sequece as a fuctio. There are may ways to do this, with the most commo ways
Math 566 Fall 05 Some otes o geeratig fuctios Give a sequece a 0, a, a,..., a,..., a geeratig fuctio some way of represetig the sequece as a fuctio. There are may ways to do this, with the most commo ways
from definition we note that for sequences which are zero for n < 0, X[z] involves only negative powers of z.
![from definition we note that for sequences which are zero for n < 0, X[z] involves only negative powers of z.](/thumbs/82/85448167.jpg "from definition we note that for sequences which are zero for n < 0, X[z] involves only negative powers of z.") We ote that for the past four examples we have expressed the -trasform both as a ratio of polyomials i ad as a ratio of polyomials i -. The questio is how does oe kow which oe to use? [] X ] from defiitio
We ote that for the past four examples we have expressed the -trasform both as a ratio of polyomials i ad as a ratio of polyomials i -. The questio is how does oe kow which oe to use? [] X ] from defiitio
The z Transform. The Discrete LTI System Response to a Complex Exponential
 The Trasform The trasform geeralies the Discrete-time Forier Trasform for the etire complex plae. For the complex variable is sed the otatio: jω x+ j y r e ; x, y Ω arg r x + y {} The Discrete LTI System
The Trasform The trasform geeralies the Discrete-time Forier Trasform for the etire complex plae. For the complex variable is sed the otatio: jω x+ j y r e ; x, y Ω arg r x + y {} The Discrete LTI System
Chapter 10: Power Series
 Chapter : Power Series 57 Chapter Overview: Power Series The reaso series are part of a Calculus course is that there are fuctios which caot be itegrated. All power series, though, ca be itegrated because
Chapter : Power Series 57 Chapter Overview: Power Series The reaso series are part of a Calculus course is that there are fuctios which caot be itegrated. All power series, though, ca be itegrated because
MAS160: Signals, Systems & Information for Media Technology. Problem Set 5. DUE: November 3, (a) Plot of u[n] (b) Plot of x[n]=(0.
![MAS160: Signals, Systems & Information for Media Technology. Problem Set 5. DUE: November 3, (a) Plot of u[n] (b) Plot of x[n]=(0.](/thumbs/94/122054675.jpg "MAS160: Signals, Systems & Information for Media Technology. Problem Set 5. DUE: November 3, (a) Plot of u[n] (b) Plot of x[n]=(0.") MAS6: Sigals, Systems & Iformatio for Media Techology Problem Set 5 DUE: November 3, 3 Istructors: V. Michael Bove, Jr. ad Rosalid Picard T.A. Jim McBride Problem : Uit-step ad ruig average (DSP First
MAS6: Sigals, Systems & Iformatio for Media Techology Problem Set 5 DUE: November 3, 3 Istructors: V. Michael Bove, Jr. ad Rosalid Picard T.A. Jim McBride Problem : Uit-step ad ruig average (DSP First
ENGI Series Page 6-01
 ENGI 3425 6 Series Page 6-01 6. Series Cotets: 6.01 Sequeces; geeral term, limits, covergece 6.02 Series; summatio otatio, covergece, divergece test 6.03 Stadard Series; telescopig series, geometric series,
ENGI 3425 6 Series Page 6-01 6. Series Cotets: 6.01 Sequeces; geeral term, limits, covergece 6.02 Series; summatio otatio, covergece, divergece test 6.03 Stadard Series; telescopig series, geometric series,
Math 113 Exam 3 Practice
 Math Exam Practice Exam will cover.-.9. This sheet has three sectios. The first sectio will remid you about techiques ad formulas that you should kow. The secod gives a umber of practice questios for you
Math Exam Practice Exam will cover.-.9. This sheet has three sectios. The first sectio will remid you about techiques ad formulas that you should kow. The secod gives a umber of practice questios for you
Solutions. Number of Problems: 4. None. Use only the prepared sheets for your solutions. Additional paper is available from the supervisors.
 Quiz November 4th, 23 Sigals & Systems (5-575-) P. Reist & Prof. R. D Adrea Solutios Exam Duratio: 4 miutes Number of Problems: 4 Permitted aids: Noe. Use oly the prepared sheets for your solutios. Additioal
Quiz November 4th, 23 Sigals & Systems (5-575-) P. Reist & Prof. R. D Adrea Solutios Exam Duratio: 4 miutes Number of Problems: 4 Permitted aids: Noe. Use oly the prepared sheets for your solutios. Additioal
MAXIMALLY FLAT FIR FILTERS
 MAXIMALLY FLAT FIR FILTERS This sectio describes a family of maximally flat symmetric FIR filters first itroduced by Herrma [2]. The desig of these filters is particularly simple due to the availability
MAXIMALLY FLAT FIR FILTERS This sectio describes a family of maximally flat symmetric FIR filters first itroduced by Herrma [2]. The desig of these filters is particularly simple due to the availability
AP Calculus BC Review Applications of Derivatives (Chapter 4) and f,
 and f,") AP alculus B Review Applicatios of Derivatives (hapter ) Thigs to Kow ad Be Able to Do Defiitios of the followig i terms of derivatives, ad how to fid them: critical poit, global miima/maima, local (relative)
AP alculus B Review Applicatios of Derivatives (hapter ) Thigs to Kow ad Be Able to Do Defiitios of the followig i terms of derivatives, ad how to fid them: critical poit, global miima/maima, local (relative)
TEACHER CERTIFICATION STUDY GUIDE
 COMPETENCY 1. ALGEBRA SKILL 1.1 1.1a. ALGEBRAIC STRUCTURES Kow why the real ad complex umbers are each a field, ad that particular rigs are ot fields (e.g., itegers, polyomial rigs, matrix rigs) Algebra
COMPETENCY 1. ALGEBRA SKILL 1.1 1.1a. ALGEBRAIC STRUCTURES Kow why the real ad complex umbers are each a field, ad that particular rigs are ot fields (e.g., itegers, polyomial rigs, matrix rigs) Algebra
APPENDIX F Complex Numbers
 APPENDIX F Complex Numbers Operatios with Complex Numbers Complex Solutios of Quadratic Equatios Polar Form of a Complex Number Powers ad Roots of Complex Numbers Operatios with Complex Numbers Some equatios
APPENDIX F Complex Numbers Operatios with Complex Numbers Complex Solutios of Quadratic Equatios Polar Form of a Complex Number Powers ad Roots of Complex Numbers Operatios with Complex Numbers Some equatios
ECEN 644 HOMEWORK #5 SOLUTION SET
 ECE 644 HOMEWORK #5 SOUTIO SET 7. x is a real valued sequece. The first five poits of its 8-poit DFT are: {0.5, 0.5 - j 0.308, 0, 0.5 - j 0.058, 0} To compute the 3 remaiig poits, we ca use the followig
ECE 644 HOMEWORK #5 SOUTIO SET 7. x is a real valued sequece. The first five poits of its 8-poit DFT are: {0.5, 0.5 - j 0.308, 0, 0.5 - j 0.058, 0} To compute the 3 remaiig poits, we ca use the followig
Run-length & Entropy Coding. Redundancy Removal. Sampling. Quantization. Perform inverse operations at the receiver EEE
 Geeral e Image Coder Structure Motio Video (s 1,s 2,t) or (s 1,s 2 ) Natural Image Samplig A form of data compressio; usually lossless, but ca be lossy Redudacy Removal Lossless compressio: predictive
Geeral e Image Coder Structure Motio Video (s 1,s 2,t) or (s 1,s 2 ) Natural Image Samplig A form of data compressio; usually lossless, but ca be lossy Redudacy Removal Lossless compressio: predictive
Finite-length Discrete Transforms. Chapter 5, Sections
 Fiite-legth Discrete Trasforms Chapter 5, Sectios 5.2-50 5.0 Dr. Iyad djafar Outlie The Discrete Fourier Trasform (DFT) Matrix Represetatio of DFT Fiite-legth Sequeces Circular Covolutio DFT Symmetry Properties
Fiite-legth Discrete Trasforms Chapter 5, Sectios 5.2-50 5.0 Dr. Iyad djafar Outlie The Discrete Fourier Trasform (DFT) Matrix Represetatio of DFT Fiite-legth Sequeces Circular Covolutio DFT Symmetry Properties
EEO 401 Digital Signal Processing Prof. Mark Fowler
 EEO 40 Digital Sigal Processig Prof. Mark Fowler Note Set #3 Covolutio & Impulse Respose Review Readig Assigmet: Sect. 2.3 of Proakis & Maolakis / Covolutio for LTI D-T systems We are tryig to fid y(t)
EEO 40 Digital Sigal Processig Prof. Mark Fowler Note Set #3 Covolutio & Impulse Respose Review Readig Assigmet: Sect. 2.3 of Proakis & Maolakis / Covolutio for LTI D-T systems We are tryig to fid y(t)
Quiz No. 1. ln n n. 1. Define: an infinite sequence A function whose domain is N 2. Define: a convergent sequence A sequence that has a limit
 Quiz No.. Defie: a ifiite sequece A fuctio whose domai is N 2. Defie: a coverget sequece A sequece that has a limit 3. Is this sequece coverget? Why or why ot? l Yes, it is coverget sice L=0 by LHR. INFINITE
Quiz No.. Defie: a ifiite sequece A fuctio whose domai is N 2. Defie: a coverget sequece A sequece that has a limit 3. Is this sequece coverget? Why or why ot? l Yes, it is coverget sice L=0 by LHR. INFINITE
Worksheet on Generating Functions
 Worksheet o Geeratig Fuctios October 26, 205 This worksheet is adapted from otes/exercises by Nat Thiem. Derivatives of Geeratig Fuctios. If the sequece a 0, a, a 2,... has ordiary geeratig fuctio A(x,
Worksheet o Geeratig Fuctios October 26, 205 This worksheet is adapted from otes/exercises by Nat Thiem. Derivatives of Geeratig Fuctios. If the sequece a 0, a, a 2,... has ordiary geeratig fuctio A(x,
ANSWERS SOLUTIONS iiii i. and 1. Thus, we have. i i i. i, A.
 013 ΜΑΘ Natioal Covetio ANSWERS (1) C A A A B (6) B D D A B (11) C D D A A (16) D B A A C (1) D B C B C (6) D C B C C 1. We have SOLUTIONS 1 3 11 61 iiii 131161 i 013 013, C.. The powers of i cycle betwee
013 ΜΑΘ Natioal Covetio ANSWERS (1) C A A A B (6) B D D A B (11) C D D A A (16) D B A A C (1) D B C B C (6) D C B C C 1. We have SOLUTIONS 1 3 11 61 iiii 131161 i 013 013, C.. The powers of i cycle betwee
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science. Fall Problem Set 11 Solutions.
 Massachusetts Istitute of Techology Departmet of Electrical Egieerig ad Computer Sciece Issued: Thursday, December 8, 005 6.341: Discrete-Time Sigal Processig Fall 005 Problem Set 11 Solutios Problem 11.1
Massachusetts Istitute of Techology Departmet of Electrical Egieerig ad Computer Sciece Issued: Thursday, December 8, 005 6.341: Discrete-Time Sigal Processig Fall 005 Problem Set 11 Solutios Problem 11.1
MATHEMATICS. 61. The differential equation representing the family of curves where c is a positive parameter, is of
 MATHEMATICS 6 The differetial equatio represetig the family of curves where c is a positive parameter, is of Order Order Degree (d) Degree (a,c) Give curve is y c ( c) Differetiate wrt, y c c y Hece differetial
MATHEMATICS 6 The differetial equatio represetig the family of curves where c is a positive parameter, is of Order Order Degree (d) Degree (a,c) Give curve is y c ( c) Differetiate wrt, y c c y Hece differetial
A. Basics of Discrete Fourier Transform
 A. Basics of Discrete Fourier Trasform A.1. Defiitio of Discrete Fourier Trasform (8.5) A.2. Properties of Discrete Fourier Trasform (8.6) A.3. Spectral Aalysis of Cotiuous-Time Sigals Usig Discrete Fourier
A. Basics of Discrete Fourier Trasform A.1. Defiitio of Discrete Fourier Trasform (8.5) A.2. Properties of Discrete Fourier Trasform (8.6) A.3. Spectral Aalysis of Cotiuous-Time Sigals Usig Discrete Fourier
ELEG3503 Introduction to Digital Signal Processing
 ELEG3503 Itroductio to Digital Sigal Processig 1 Itroductio 2 Basics of Sigals ad Systems 3 Fourier aalysis 4 Samplig 5 Liear time-ivariat (LTI) systems 6 z-trasform 7 System Aalysis 8 System Realizatio
ELEG3503 Itroductio to Digital Sigal Processig 1 Itroductio 2 Basics of Sigals ad Systems 3 Fourier aalysis 4 Samplig 5 Liear time-ivariat (LTI) systems 6 z-trasform 7 System Aalysis 8 System Realizatio
Discrete-Time Systems, LTI Systems, and Discrete-Time Convolution
 EEL5: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we begi our mathematical treatmet of discrete-time s. As show i Figure, a discrete-time operates or trasforms some iput sequece x [
EEL5: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we begi our mathematical treatmet of discrete-time s. As show i Figure, a discrete-time operates or trasforms some iput sequece x [