Chapter 7 z-transform
|
|
|
- Jared Porter
- 5 years ago
- Views:
Transcription
1 Chapter 7 -Trasform Itroductio Trasform Uilateral Trasform Properties Uilateral Trasform Iversio of Uilateral Trasform Determiig the Frequecy Respose from Poles ad Zeros
2 Itroductio Role i Discrete-Time Systems -Trasform is the discrete-time couterpart of the Laplace trasform. Respose of Discrete-Time Systems If the system y[] + 3y[-] + y[-] = u[] + u[-] - u[-] for = 0,, The respose of the system is excited by a iput u[] ad some iitial coditios. The differece equatios are basically algebraic equatios, their solutios ca be obtaied by direct substitutio. The solutio however is ot i closed form ad is difficult to develop geeral properties of the system. A umber of desig techiques have bee developed i the -Trasform domai.
3 -Trasform 3 Positive ad Negative Time Sequece A discrete-time sigal x[], where is a iteger ragig (- <<, is called a positive-time sequece if x[]=0 for < 0; it is called a egative-time sequece if x[] = 0 for > 0. We maily cosider the positive-time sequeces. -Trasform Pair The -trasform is defied as where is a complex variable, called the -trasform variable. Example X ( Z [ x [ ]] x [ ] x[] = {,, 5, 7, 0, }; x[] = (/ u{}
4 -Trasform (c. 4 Example f[] = b for all positive iteger ad b is a real or complex umber. If b, the the ifiity power series coverges ad F( b b The regio b is called the regio of covergece. Uit Step Sequece The uit sequece is defied as The -Trasform is Expoetial Sequece F( f [ ] b ( b f[] = e at F for 0,,, q[ ] 0 for 0 Q( 0 at ( e at 0 e b
5 -Trasform (c. 5 Regio of Covergece For ay give sequece, the set of values of for which the -trasform coverges is called the regio of covergece. Viewpoits The represetatio of the complex variable re j Cosider the -trasform ROC icludes the uit circle ==> Fourier Trasform coverges j j X( re x[ ]( re Coverget Coditio x[ ] r Covergece of the -Trasform ==> The -trasform ad its derivatives must be cotiuous fuctio of.
6 Uilateral Trasform The -Plae. If x[] is absolutely summable, the the DTFT obtaied from the -trasform by settig r =, or substitutig = e j ito Eq. (7.4. That is, j j e. e ( The equatio = e j describes a circle of uit radius cetered o the origi i the -plae. Fig Uit circle i the -plae. The frequecy i the DTFT correspods to the poit o the uit circle at a agle with respect to the positive real axis.
7 Uilateral Trasform 7 Determie the -trasform of the sigal x,,,, 0, 0 otherwise Use the -trasform to determie the DTFT of x[]. <Sol.>. We substitute the prescribed x[] ito Eq. (7.4 to obtai.. We obtai the DTFT from X( by substitutig = e j : j j j j e e e e.
8 Uilateral Trasform 7..3 Poles ad Zeros. The -trasform i terms of two polyomials i :. 0 0 N N M M a a a b b b. ~ N M d c b where 0 0 / gai factor b b a. The c are the roots of the umerator polyomial the eros of X(. The d are the roots of the deomiator polyomial the poles of X(. 3. Symbols i the -plae: poles; eros 8
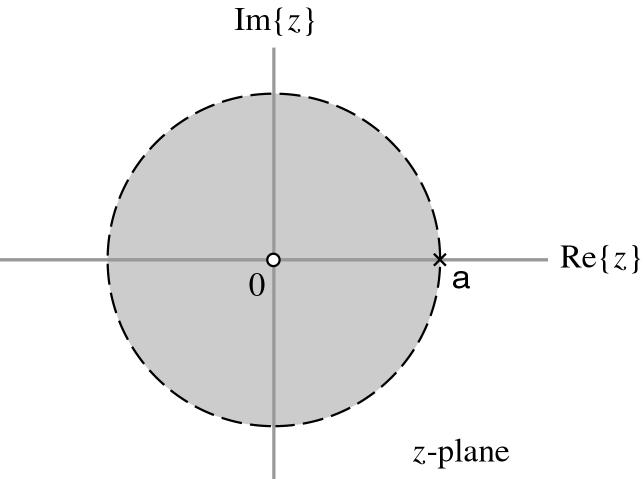
9 Uilateral Trasform 9 Example 7. -TRANSFORM OF A CAUSAL EXPONENTIOAL SIGNAL Determie the -trasform of the sigal x u. Depict the ROC ad the locatio of poles ad eros of X( i the -plae. <Sol.>. Substitutig x[] = α u[] ito Eq. (7.4 yields u 0.. This is a geometric series of ifiite legth i the ratio α/; the sum coverges, provided that α/ <, or > α. Hece,,,. (7.7
10 Uilateral Trasform 0 3. There is thus a pole at = α ad a ero at = 0, as illustrated i Fig 7.5. the ROC is depicted as the shaded regio of the -plae. a
11 Uilateral Trasform Example 7.3 -TRANSFORM OF A ANTICAUSAL EXPONENTIOAL SIGNAL Determie the -trasform of the sigal y u. Depict the ROC ad the locatio of poles ad eros of X( i the -plae. <Sol.>. We substitutig y[] = -α u[ - -] ito Eq.(7.4 ad write Y u 0.. The sum coverges, provide that / <, or < α. Hece, Y,,, 3. The ROC ad the locatio of poles ad ero are depicted i Fig 7.6. (7.8
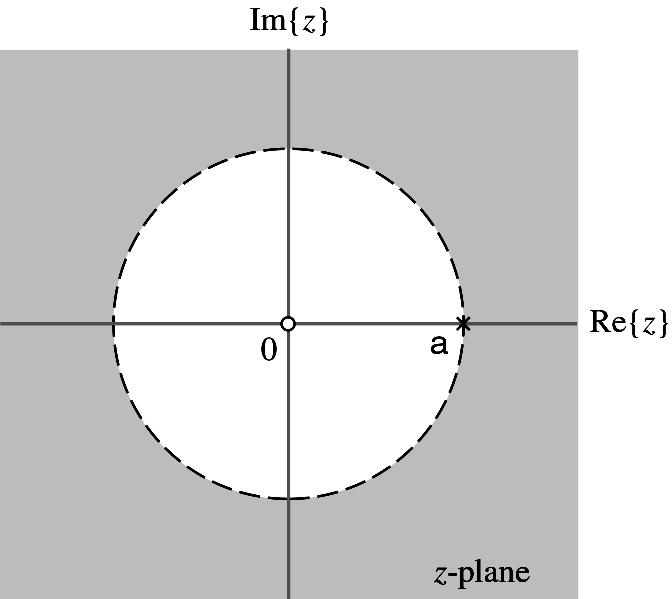
12 Uilateral Trasform,,. Y,,, a

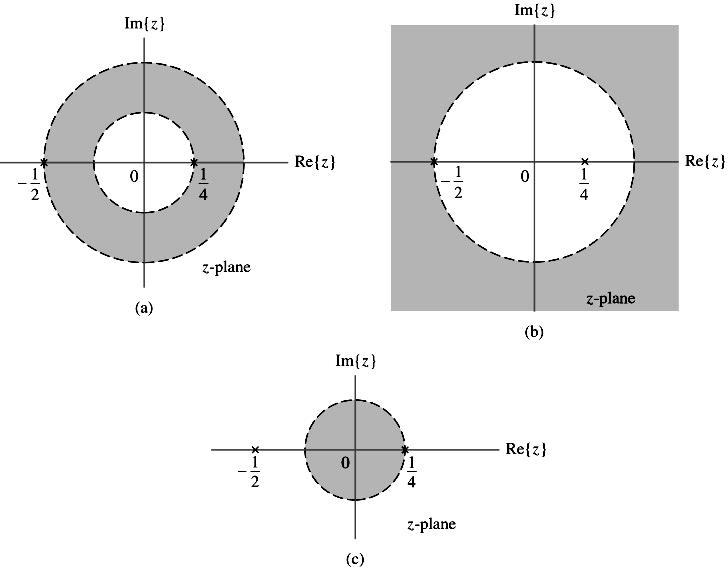
13 Uilateral Trasform 3 Example 7.4 -TRANSFORM OF A TWO SIDED SIGNAL Determie the -trasform of. u u x Depict the ROC ad the locatio of poles ad eros of X( i the -plae. <Sol.>. Substitutig for x[] i Eq. (7.4, we obtai u u /,
14 Properties of ROC 4 Ratioal Fuctio Ex. X( P( Q( x[ ] a u[ ] x[ ] a u[ ]
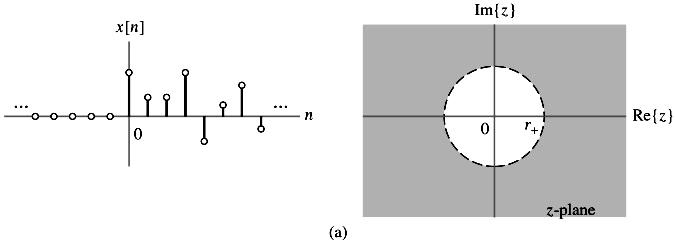
15 Properties of ROC 5 Properties The ROC is a rig or dis i the -plae cetered at the origi, i.e., The Fourier trasform of x[] coverges absolutely if ad oly if the ROC of the -trasform of x[] icludes the uit circle. The ROC caot cotai ay poles. If x[] is a fiite-duratio sequece, i.e. a sequece that is ero except i a fiite iterval N N, the the ROC is the etire -plae except possibly =0 or =. If x[] is a right-sided sequece, i.e. a sequece that is ero for <N <, the ROC exteds outward from the outermost fiite pole i X( to =. If x[] is a left-sided sequece, i.e., a sequece that is ero for >N >-, the ROC exteds iward from the iermost (smallest magitude oero pole i X( to (ad possibly icludig =0. A two-sided sequece is a ifiite-duratio sequece that is either right-sided or left-sided. If x[] is a two-sided sequece, the ROC will cosist of a rig i the -plae, bouded o the iterior ad exterior by a pole, ad, cosistet with property 3, ot cotaiig ay poles. The ROC must be a coected regio. 0 r r R L
16 Properties 6 of ROC
17 7 Properties of ROC
18 Properties Uilateral Trasform 8. Assume that Z, with ROC x x R Z, with ROC y y Y R The ROC is chaged by certai operatios.. Liearity: The ROC ca be larger tha the itersectio if oe or more terms i x[] or y[] cacel each other i the sum. Z, with ROC at least x y ax by a by R R (7. Time Reversal x Z, with ROC R x (7. Time reversal, or reflectio, correspods to replacig by. Hece, if R x is of the form a < < b, the ROC of the reflected sigal is a < / < b, or /b < < /a.
19 Properties Uilateral Trasform 9 Multiplicatio by a Expoetial Sequece. Let be a complex umber. The x,with ROC R. The otatio, R x implies that the ROC boudaries are multiplied by. 3. If R x is a < < b, the the ew ROC is a < < b. 4. If X( cotais a factor d i the deomiator, so that d is pole, the X(/ has a factor d i the deomiator ad thus has a pole at d. 5. If c is a ero of X(, the X(/ has a ero at c. 6. This idicates that the poles ad eros of X( have their radii chaged by, ad their agles are chaged by arg{}. x
20 The Uilateral -Trasform 0 Defiitio X ( Z [ x [ ]] x [ ] 0 Time Delay x [ ] X ( x [ ] X ( x [ ] i x [ ] X ( x [ ] 0
21 Figure 7. (p. 569 The effect of multiplicatio by o the poles ad eros of a trasfer fuctio. (a Locatios of poles ad eros of X(. (b Locatios of poles ad eros of X(/. Iversio of Uilateral Trasform Covolutio Z, with ROC at least x y x y Y R R (7.5. Covolutio of time-domai sigals correspods to multiplicatio of - trasforms.. The ROC may be larger tha the itersectio of R x ad R y if a pole-ero cacellatio occurs i the product X(Y(.
22 The Iverse -Trasform Methods Direct Divisio Partial Fractio Expasio Direct Divisio F( = f[] = {-, 3, 0, 0, 3, 3, 9,...} Ex. 3/( - - F(
23 3 Iverse -trasform by Power Series Expasio
24 4 C m The Iverse -Trasform (c. Partial Fractio Expasio ad Table Looup X ( M N b0 X ( a ( c ( d If M<N ad the poles are all first order N b0 A X ( a 0 If M>= N ad the poles are all first order, the complete partial fractio expressio ca be M N X ( B r 0 ( c ( d If X( has multiple-order poles ad M>=N M N N s r A X ( Br ( s m!( d i s m s d dw m 0 M N ( d A ( d X ( r r N A ( d s [( d w X ( w ] s m i w d i r 0 d A ( d X ( d, i C ( d ( d m i m m
25 Trasfer Fuctio 5. Output of LTI system: h x Taig -trasform HX y *. Trasfer fuctio: Y H (7.0 X Y (7.9 This defiitio applies at all i the ROC of X( ad Y( for which X( is oero. x[] LTI system, h[] or H( y[] = x[] h[] Y H X
26 Trasfer Fuctio 6 Example 7.3 System Idetificatio The problem of fidig the system descriptio from owledge of iput ad output is ow as system idetificatio. Fid the trasfer fuctio ad impulse respose of a causal LTI system if the iput to the system is x (/ 3 u ad the output is y <Sol.> 3( u (/3 u. The -trasforms of the iput ad output are respectively give by X ( with ROC / 3 (/ 3 ad 3 Y( (/ 3 4 ( ( (/ 3, with ROC
27 Trasfer Fuctio 7. We apply Eq.(7.0 the obtai the trasfer fuctio: 4( (/ 3 ( ( (/ 3 H(, with ROC 3. The impulse respose of the system is obtai by fidig the iverse - trasform of H(. Applyig a partial fractio expasio to H( yields H(, with ROC (/ 3 4. The impulse respose is thus give by ( u (/ 3 u h
28 8 Solvig Differece Equatios with Iitial Coditios Differetiatio i the -Domai d x R d Z, with ROC x (7.6. Multiplicatio by i the time domai correspods to differetiatio with respect to ad multiplicatio of the result by i the -domai.. This operatio does ot chage the ROC.
29 Trasfer Fuctio Relatig the Trasfer Fuctio ad the Differece equatio. Nth-order differece equatio: K 0 a y M b x K 0. The trasfer fuctio H( is a eigevalue of the system associated with the eigefuctio. If x[] =, the the output of a LTI system is y[] = H(. Substitutig x[ ] = H( ito the differece equatio gives the relatioship N K 0 a H( 3. Trasfer fuctio: M K 0 b Y ( H ( X ( M 0 N 0 b a Ratioal trasfer fuctio (7. See page 58, textboo.
30 Trasfer Fuctio 30 Example 7.4 Fidig the Trasfer Fuctio ad Impulse Respose Determie the trasfer fuctio ad the impulse respose for the causal LTI system described by the differece equatio y ( / 4 y (3/8 y x x <Sol.>. We obtai the trasfer fuctio by applyig Eq.(7.: H( (/ 4 (3/ 8. The impulse respose is foud by idetifyig the iverse -trasform of H(. Applyig a partial-fractio expasio to H( give H ( (/ (3/ 4 3. The system is causal, so we choose the right-side iverse -trasform for each term to obtai the followig impulse respose: ( / u (3/ 4 u h
31 Trasfer Fuctio 3 Example 7.5 Fidig a Differece-Equatio Descriptio Fid the differece-equatio descriptio of a LTI system with trasfer fuctio 5 H( ( 3 <Sol.>. We rewrite H( as a ratio of polyomials i. Dividig both the umerator ad deomiator, we obtai 5 H( ( 3. Comparig trasfer fuctio with Eq.(7., we coclude that M =, N =, b 0 = 0, b = 5, b =, a 0 =, a = 3, ad a =. Hece, this system is described by the differece equatio y 3y[ ] y[ ] 5x x Trasfer fuctio i pole-ero form: where c eros; d poles; ad b b / a gai factor 0 0 ~ M b ( c H( N ( d (7.
32 Causality ad Stability 3. The impulse respose of a stable LTI system is absolutely summable ad the DTFT of the impulse respose exists. Pole d iside the uit circle, i.e., d < Left-sided iverse trasform The ROC must icludes the uit circle i the -plae. Expoetially decayig term Pole d outside the uit circle, i.e., d > Right-sided iverse trasform Expoetially icreasig term Fig. 7.5 Note that a stable impulse respose caot cotai ay icreasig expoetial or siusoidal terms, sice the the impulse respose is ot absolutely summable. LTI system are both stable ad causal must have all their poles iside the uit circle. Fig. 7.6
33 Causality ad Stability 33 Figure 7.5 (p. 583 The relatioship betwee the locatio of a pole ad the impulse respose characteristics for a stable system. (a A pole iside the uit circle cotributes a right-sided term to the impulse respose. (b A pole outside the uit circle cotributes a left-sided term to the impulse respose.
34 Causality ad Stability 34 Figure 7.6 (p. 584 A system that is both stable ad causal must have all its poles iside the uit circle i the -plae, as illustrated here.
35 Causality ad Stability Iverse System. The impulse respose of a iverse system, h iv [], satisfies h iv * h where h[] is the impulse respose of the system to be iverted.. Taig -trasform: H iv ( H( H iv ( H( 3. If H( is writte i pole-ero form show i Eq. (7.3, the H iv ( ~ b p N l M p ( d ( c (7.4 Ay system described by a ratioal trasfer fuctio has a iverse system of this form.
36 Causality ad Stability 36 Figure 7.8 (p. 586 A system that has a causal ad stable iverse must have all its poles ad eros iside the uit circle, as illustrated here. 4. H iv ( is both stable ad causal if all of its poles are iside the uit circle. Sice the poles of H iv ( are the eros of H (, we coclude that a stable ad causal iverse of a LTI system H( exists if ad oly if all the eros of H( are iside the uit circle. 5. A system with all its poles ad eros iside the uit circle, as illustrated i Fig. 7.8, is termed a miimum-phase system. The phase respose of a miimum-phase system is uiquely determied by the magitude respose, ad vice versa.
37 Causality ad Stability 37 Example 7.8 Stable ad Causal Iverse System A LTI system is described by the differece equatio Fid the trasfer fuctio of the iverse system. Does a stable ad causal LTI iverse system exist? ] [ 8 ] [ 4 ] [ 4 ] [ x x x y y y <Sol.>. We fid the trasfer fuctio of the give system by applyig Eq.(7. to obtai ( ( ( ( H. The iverse system the has the trasfer fuctio ( ( ( ( 4 H iv
38 Determiig the Frequecy Respose from Poles ad Zeros Impulse Respose for Ratioal Fuctios M N H ( B r 0 r r N M N N A h[ ] Br [ r ] A d u[ ] d r 0 Ifiite Impulse Repose (IIR Systems The legth of the impulse respose is ifiite. Fiite Impulse Respose (FIR Systems The legth of the impulse repose is fiite. Examples M y [ ] a x [ ] 0 How to chec? M y [ ] ay [ ] x[ ] a x[ M ]
39 Determiig the Frequecy Respose from Poles ad Zeros A stable liear time-ivariat system Ratioal Fuctio Magitude Respose M j H ( e Gai (db b a 0 0 N c e d e j H ( e j j M j b e b 0 N j 0 a0 a e 0 j ( c e j ( d e H e j ( m is approximately 6m db, while H e j ( 0 m is approximately 0m db j H ( e b a 0 0 M N M N j j c e c * e j j d e d * e M N j b0 j 0 log 0 H ( e 0 log0 0 log0 c e 0 log0 d e a j 0 0 log Y ( e j 0 log H ( e j 0 log X ( e j 0 0 0
40 Determiig the Frequecy Respose from Poles ad Zeros Phase Respose (c. j H ( e M N b 0 j j [ c e [ d e a 0 The pricipal value of the phase is deoted as ARG[H(e jw ] j ARG [ H ( e ] j H ( e ARG [ H ( e ] r ( Pricipal Values = Sum of Idividual M PVs j 0 ARG H e ARG N j [ ( ] ARG b [ c e a 0 ARG [ d e r ( j j
41 Determiig the Frequecy Respose from Poles ad Zeros Phase Distortio ad Delay Observatio j h [ ] [ ] H ( e e id d The Ideal Lowpass Filter with liear phase H lp j ( e e 0, j d, c Delay Liear Phase Observatio -- A arrow bad sigal s[]cos( 0 The phase for the 0 ca be approximated as Group Delay-- A measure for the oliearity of the phase c id h lp [ ] y [ ] s[ ]cos( d j d j ( grd [ H ( e ] H ( e d j d Ideal Filters with Causality? si c ( d, ( d j H ( e d 0 d
42 Determiig the Frequecy Respose from Poles ad Zeros Phase Respose Alterative relatio j j H I ( e ARG [ H ( e ] arcta j H R ( e Group Delay Derivative of the cotiuous phase fuctio That is j d j d j d j grd [ H ( e ] {arg[ H ( e ]} (arg[ d e ] (arg[ ce ] d d d grd [ H ( e ] N j Ca be obtaied from the priciple values except at discotiuities. N j M d Re{ d e } c Re{ ce } j j d Re{ d e } c Re{ c e } M j

43 Determiig the Frequecy Respose from Poles ad Zeros Sigle Pole or Zero The form p ( The magitude squared re e ( re e ( re e r r cos( The log magitude i db is The phase Group Delay j j j j j j j j 0 0 0log re e 0log [ r r cos( ] j j r si( ARG re e arcta r cos( j grd re e j r r cos( r r cos( r r cos( j j re e
44 Determiig the Frequecy Respose from Poles ad Zeros Sigle Pole or Zero Group Delay cos( cos( cos( ( si cos( cos( cos( cos( cos( cos( ( si cos( cos( cos( si( r r r r r r r r r r r r r r r r r r e re grd j j cos( si( arcta r r e re ARG j j
45 Determiig the Frequecy Respose from Poles ad Zeros Ex. ( p v v 3 3 3
46 Determiig the Frequecy Respose from Poles ad Zeros Frequecy Resposee for a Sigle Zero at
47 Determiig the Frequecy Respose from Poles ad Zeros Frequecy Respose for a Sigle Zero ear
48 Determiig the Frequecy Respose from Poles ad Zeros 48 Relatioship betwee the locatios of poles ad eros i the -plae ad the frequecy respose of the system:. Trasfer fuctio: Substitutig e j for i H(. Assume that the ROC icludes the uit circle. Substitutig = e j ito Eq. (7.3 gives ( ( ~ ( j l N jl j p M jp j e d e e c be e H ( ( ~ ( ( j l N j p M M N j j d e c e be e H ( The magitude of H(e j at some fixed value of, say, 0, is defied by ( ( ~ ( 0 j l N j p M j d e c e b e H o e j 0 g product term, where g represets either a pole or a ero.
49 Determiig the Frequecy Respose 49 from Poles ad Zeros 4. Vector represetatio of e j g: Fig e j 0 a vector from the origi to e j 0 ; g a vector from the origi to g. We assess the cotributio of each pole ad ero to the overall frequecy respose by examiig e j 0 g as 0 chages. Figure 7.9 (p. 589 Vector iterpretatio of e j 0 g i the -plae.
50 Determiig the Frequecy Respose 50 from Poles ad Zeros Figure 7.0 (p. 589 The quatity e j g is the legth of a vector from g to e j i the -plae. (a Vectors from g to e j at several frequecies. (b The fuctio e j g. 5. Fig. 7.0(a depicts the vector e j 0 g for several differet values of ; while Fig. 7.0(b depicts e j 0 g as a cotiuous fuctio of frequecy.
51 Determiig the Frequecy Respose 5 from Poles ad Zeros If = arg{g}, the e j g attais its miimum value of g whe g is iside the uit circle ad taes o the value g whe g is outside the uit circle. Hece, if g is close to the uit circle ( g, the e j g becomes very small whe = arg{g}. 6. If g represets a ero, the e j g cotributes to the umerator of H(e j. Thus, at frequecies ear arg{g}, H(e j teds to have a miimum. 7. If g represets a pole, the e j g cotributes to the deomiator of H(e j. Whe e j g decreases, H(e j icreases, with the sie of the icrease depedet o how far the pole is from the uit circle.
52 Determiig the Frequecy Respose 5 from Poles ad Zeros Example 7. Magitude Respose from Poles ad Zeros Setch the magitude respose for a LTI system havig the trasfer fuctio <Sol.> H( ( 0.9e j 4 ( 0.9e j 4 The system has a ero at = - ad poles at = 0.9 e jπ/4 ad = 0.9e jπ/4 as depicted i Fig.7.3(a. Hece, the magitude respose will be ero at = ad will be large at = ± /4, because the poles are close to the uit circle. Figures 7.3 (b-(d depict the compoet of the magitude respose associated with the ero ad each poles. Multiplicatio of these cotributios gives the overall magitude respose setched i Fig. 7.3(e.
53 Figure 7.3a (p Solutio for Example 7.. (a Locatios of poles ad eros i the -plae. (b The compoet of the magitude respose associated with a ero is give by the legth of a vector from the ero to e j. p ; v Sigals_ad_Systems_Simo Hayi & Barry Va Vee
54 p ; v 54 Figure 7.3a (p. 59 Solutio for Example 7.. (c The compoet of the magitude respose associated with the pole at = e j/4 is the iverse of the legth of a vector from the pole to e j.
55 55 Figure 7.3b (p. 593, cotiued (d The compoet of the magitude respose associated with the pole at is the iverse of the legth of a vector from the pole to e j. (e The system magitude respose is the product of the respose i parts (b (d. p ; v Sigals_ad_Systems_Simo Hayi & Barry Va Vee
56 Determiig the Frequecy Respose 56 from Poles ad Zeros The phase of H(e j may also be evaluated i terms of the phase associated with each pole ad ero.. Usig Eq.(7.5, we obtai M P N l j j j arg{ H( e } arg{ b ~ } ( N M arg{ e c } arg{ e d }. The phase of H(e j ivolves the sum of the phase agles due to each ero mius the phase agle due to each pole. Discussio: see pp , textboo. Figure 7.5 (p. 593 The quatity arg{e j g} is the agle of the vector from g to e j with respect to a horiotal lie through g, as show here.

57 Remars Four System Descriptios Impulse Respose Differece Equatios Frequecy Respose Z-Trasform ( Trasfer Fuctio ad System Fuctio x[] LTI Systems y[] M y [ ] x[ ]* h[ ] h[ ] x[ ] N a y [ ] b x [ ] 0 0 Y(e j =H(e j X(e j Y(=H(X(
58 Remars 58 Itroductio Trasform Uilateral Trasform Properties Uilateral Trasform Iversio of Uilateral Trasform Determiig the Frequecy Respose from Poles ad Zeros
The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j
![The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j](/thumbs/82/85448534.jpg "The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j") The -Trasform 7. Itroductio Geeralie the complex siusoidal represetatio offered by DTFT to a represetatio of complex expoetial sigals. Obtai more geeral characteristics for discrete-time LTI systems. 7.
The -Trasform 7. Itroductio Geeralie the complex siusoidal represetatio offered by DTFT to a represetatio of complex expoetial sigals. Obtai more geeral characteristics for discrete-time LTI systems. 7.
Chapter 7: The z-transform. Chih-Wei Liu
 Chapter 7: The -Trasform Chih-Wei Liu Outlie Itroductio The -Trasform Properties of the Regio of Covergece Properties of the -Trasform Iversio of the -Trasform The Trasfer Fuctio Causality ad Stability
Chapter 7: The -Trasform Chih-Wei Liu Outlie Itroductio The -Trasform Properties of the Regio of Covergece Properties of the -Trasform Iversio of the -Trasform The Trasfer Fuctio Causality ad Stability
Definition of z-transform.
 - Trasforms Frequecy domai represetatios of discretetime sigals ad LTI discrete-time systems are made possible with the use of DTFT. However ot all discrete-time sigals e.g. uit step sequece are guarateed
- Trasforms Frequecy domai represetatios of discretetime sigals ad LTI discrete-time systems are made possible with the use of DTFT. However ot all discrete-time sigals e.g. uit step sequece are guarateed
Generalizing the DTFT. The z Transform. Complex Exponential Excitation. The Transfer Function. Systems Described by Difference Equations
 Geeraliig the DTFT The Trasform M. J. Roberts - All Rights Reserved. Edited by Dr. Robert Akl 1 The forward DTFT is defied by X e jω = x e jω i which = Ω is discrete-time radia frequecy, a real variable.
Geeraliig the DTFT The Trasform M. J. Roberts - All Rights Reserved. Edited by Dr. Robert Akl 1 The forward DTFT is defied by X e jω = x e jω i which = Ω is discrete-time radia frequecy, a real variable.
The z transform is the discrete-time counterpart of the Laplace transform. Other description: see page 553, textbook.
 The -Trasform 7. Itroductio The trasform is the discrete-time couterpart of the Laplace trasform. Other descriptio: see page 553, textbook. 7. The -trasform Derivatio of the -trasform: x[] re jω LTI system,
The -Trasform 7. Itroductio The trasform is the discrete-time couterpart of the Laplace trasform. Other descriptio: see page 553, textbook. 7. The -trasform Derivatio of the -trasform: x[] re jω LTI system,
M2.The Z-Transform and its Properties
 M2.The Z-Trasform ad its Properties Readig Material: Page 94-126 of chapter 3 3/22/2011 I. Discrete-Time Sigals ad Systems 1 What did we talk about i MM1? MM1 - Discrete-Time Sigal ad System 3/22/2011
M2.The Z-Trasform ad its Properties Readig Material: Page 94-126 of chapter 3 3/22/2011 I. Discrete-Time Sigals ad Systems 1 What did we talk about i MM1? MM1 - Discrete-Time Sigal ad System 3/22/2011
3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,
![3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,](/thumbs/82/85448051.jpg "3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,") 3. Z Trasform Referece: Etire Chapter 3 of text. Recall that the Fourier trasform (FT) of a DT sigal x [ ] is ω ( ) [ ] X e = j jω k = xe I order for the FT to exist i the fiite magitude sese, S = x [
3. Z Trasform Referece: Etire Chapter 3 of text. Recall that the Fourier trasform (FT) of a DT sigal x [ ] is ω ( ) [ ] X e = j jω k = xe I order for the FT to exist i the fiite magitude sese, S = x [
6.003 Homework #3 Solutions
 6.00 Homework # Solutios Problems. Complex umbers a. Evaluate the real ad imagiary parts of j j. π/ Real part = Imagiary part = 0 e Euler s formula says that j = e jπ/, so jπ/ j π/ j j = e = e. Thus the
6.00 Homework # Solutios Problems. Complex umbers a. Evaluate the real ad imagiary parts of j j. π/ Real part = Imagiary part = 0 e Euler s formula says that j = e jπ/, so jπ/ j π/ j j = e = e. Thus the
The Z-Transform. Content and Figures are from Discrete-Time Signal Processing, 2e by Oppenheim, Shafer, and Buck, Prentice Hall Inc.
 The Z-Trasform Cotet ad Figures are from Discrete-Time Sigal Processig, e by Oppeheim, Shafer, ad Buck, 999- Pretice Hall Ic. The -Trasform Couterpart of the Laplace trasform for discrete-time sigals Geeraliatio
The Z-Trasform Cotet ad Figures are from Discrete-Time Sigal Processig, e by Oppeheim, Shafer, ad Buck, 999- Pretice Hall Ic. The -Trasform Couterpart of the Laplace trasform for discrete-time sigals Geeraliatio
from definition we note that for sequences which are zero for n < 0, X[z] involves only negative powers of z.
![from definition we note that for sequences which are zero for n < 0, X[z] involves only negative powers of z.](/thumbs/82/85448167.jpg "from definition we note that for sequences which are zero for n < 0, X[z] involves only negative powers of z.") We ote that for the past four examples we have expressed the -trasform both as a ratio of polyomials i ad as a ratio of polyomials i -. The questio is how does oe kow which oe to use? [] X ] from defiitio
We ote that for the past four examples we have expressed the -trasform both as a ratio of polyomials i ad as a ratio of polyomials i -. The questio is how does oe kow which oe to use? [] X ] from defiitio
Z - Transform. It offers the techniques for digital filter design and frequency analysis of digital signals.
 Z - Trasform The -trasform is a very importat tool i describig ad aalyig digital systems. It offers the techiques for digital filter desig ad frequecy aalysis of digital sigals. Defiitio of -trasform:
Z - Trasform The -trasform is a very importat tool i describig ad aalyig digital systems. It offers the techiques for digital filter desig ad frequecy aalysis of digital sigals. Defiitio of -trasform:
Chapter 3. z-transform
 Chapter 3 -Trasform 3.0 Itroductio The -Trasform has the same role as that played by the Laplace Trasform i the cotiuous-time theorem. It is a liear operator that is useful for aalyig LTI systems such
Chapter 3 -Trasform 3.0 Itroductio The -Trasform has the same role as that played by the Laplace Trasform i the cotiuous-time theorem. It is a liear operator that is useful for aalyig LTI systems such
Digital Signal Processing
 Digital Sigal Processig Z-trasform dftwave -Trasform Backgroud-Defiitio - Fourier trasform j ω j ω e x e extracts the essece of x but is limited i the sese that it ca hadle stable systems oly. jω e coverges
Digital Sigal Processig Z-trasform dftwave -Trasform Backgroud-Defiitio - Fourier trasform j ω j ω e x e extracts the essece of x but is limited i the sese that it ca hadle stable systems oly. jω e coverges
COMM 602: Digital Signal Processing
 COMM 60: Digital Sigal Processig Lecture 4 -Properties of LTIS Usig Z-Trasform -Iverse Z-Trasform Properties of LTIS Usig Z-Trasform Properties of LTIS Usig Z-Trasform -ve +ve Properties of LTIS Usig Z-Trasform
COMM 60: Digital Sigal Processig Lecture 4 -Properties of LTIS Usig Z-Trasform -Iverse Z-Trasform Properties of LTIS Usig Z-Trasform Properties of LTIS Usig Z-Trasform -ve +ve Properties of LTIS Usig Z-Trasform
The z-transform can be used to obtain compact transform-domain representations of signals and systems. It
 3 4 5 6 7 8 9 10 CHAPTER 3 11 THE Z-TRANSFORM 31 INTRODUCTION The z-trasform ca be used to obtai compact trasform-domai represetatios of sigals ad systems It provides ituitio particularly i LTI system
3 4 5 6 7 8 9 10 CHAPTER 3 11 THE Z-TRANSFORM 31 INTRODUCTION The z-trasform ca be used to obtai compact trasform-domai represetatios of sigals ad systems It provides ituitio particularly i LTI system
Solutions. Number of Problems: 4. None. Use only the prepared sheets for your solutions. Additional paper is available from the supervisors.
 Quiz November 4th, 23 Sigals & Systems (5-575-) P. Reist & Prof. R. D Adrea Solutios Exam Duratio: 4 miutes Number of Problems: 4 Permitted aids: Noe. Use oly the prepared sheets for your solutios. Additioal
Quiz November 4th, 23 Sigals & Systems (5-575-) P. Reist & Prof. R. D Adrea Solutios Exam Duratio: 4 miutes Number of Problems: 4 Permitted aids: Noe. Use oly the prepared sheets for your solutios. Additioal
Chapter 2 Systems and Signals
 Chapter 2 Systems ad Sigals 1 Itroductio Discrete-Time Sigals: Sequeces Discrete-Time Systems Properties of Liear Time-Ivariat Systems Liear Costat-Coefficiet Differece Equatios Frequecy-Domai Represetatio
Chapter 2 Systems ad Sigals 1 Itroductio Discrete-Time Sigals: Sequeces Discrete-Time Systems Properties of Liear Time-Ivariat Systems Liear Costat-Coefficiet Differece Equatios Frequecy-Domai Represetatio
Chapter 4 : Laplace Transform
 4. Itroductio Laplace trasform is a alterative to solve the differetial equatio by the complex frequecy domai ( s = σ + jω), istead of the usual time domai. The DE ca be easily trasformed ito a algebraic
4. Itroductio Laplace trasform is a alterative to solve the differetial equatio by the complex frequecy domai ( s = σ + jω), istead of the usual time domai. The DE ca be easily trasformed ito a algebraic
EE Midterm Test 1 - Solutions
 EE35 - Midterm Test - Solutios Total Poits: 5+ 6 Bous Poits Time: hour. ( poits) Cosider the parallel itercoectio of the two causal systems, System ad System 2, show below. System x[] + y[] System 2 The
EE35 - Midterm Test - Solutios Total Poits: 5+ 6 Bous Poits Time: hour. ( poits) Cosider the parallel itercoectio of the two causal systems, System ad System 2, show below. System x[] + y[] System 2 The
Time-Domain Representations of LTI Systems
 2.1 Itroductio Objectives: 1. Impulse resposes of LTI systems 2. Liear costat-coefficiets differetial or differece equatios of LTI systems 3. Bloc diagram represetatios of LTI systems 4. State-variable
2.1 Itroductio Objectives: 1. Impulse resposes of LTI systems 2. Liear costat-coefficiets differetial or differece equatios of LTI systems 3. Bloc diagram represetatios of LTI systems 4. State-variable
Introduction to Signals and Systems, Part V: Lecture Summary
 EEL33: Discrete-Time Sigals ad Systems Itroductio to Sigals ad Systems, Part V: Lecture Summary Itroductio to Sigals ad Systems, Part V: Lecture Summary So far we have oly looked at examples of o-recursive
EEL33: Discrete-Time Sigals ad Systems Itroductio to Sigals ad Systems, Part V: Lecture Summary Itroductio to Sigals ad Systems, Part V: Lecture Summary So far we have oly looked at examples of o-recursive
Frequency Response of FIR Filters
 EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we itroduce the idea of the frequecy respose of LTI systems, ad focus specifically o the frequecy respose of FIR filters.. Steady-state
EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we itroduce the idea of the frequecy respose of LTI systems, ad focus specifically o the frequecy respose of FIR filters.. Steady-state
ECE-S352 Introduction to Digital Signal Processing Lecture 3A Direct Solution of Difference Equations
 ECE-S352 Itroductio to Digital Sigal Processig Lecture 3A Direct Solutio of Differece Equatios Discrete Time Systems Described by Differece Equatios Uit impulse (sample) respose h() of a DT system allows
ECE-S352 Itroductio to Digital Sigal Processig Lecture 3A Direct Solutio of Differece Equatios Discrete Time Systems Described by Differece Equatios Uit impulse (sample) respose h() of a DT system allows
The z Transform. The Discrete LTI System Response to a Complex Exponential
 The Trasform The trasform geeralies the Discrete-time Forier Trasform for the etire complex plae. For the complex variable is sed the otatio: jω x+ j y r e ; x, y Ω arg r x + y {} The Discrete LTI System
The Trasform The trasform geeralies the Discrete-time Forier Trasform for the etire complex plae. For the complex variable is sed the otatio: jω x+ j y r e ; x, y Ω arg r x + y {} The Discrete LTI System
Lecture 3. Digital Signal Processing. Chapter 3. z-transforms. Mikael Swartling Nedelko Grbic Bengt Mandersson. rev. 2016
 Lecture 3 Digital Sigal Processig Chapter 3 z-trasforms Mikael Swartlig Nedelko Grbic Begt Madersso rev. 06 Departmet of Electrical ad Iformatio Techology Lud Uiversity z-trasforms We defie the z-trasform
Lecture 3 Digital Sigal Processig Chapter 3 z-trasforms Mikael Swartlig Nedelko Grbic Begt Madersso rev. 06 Departmet of Electrical ad Iformatio Techology Lud Uiversity z-trasforms We defie the z-trasform
Exponential Moving Average Pieter P
 Expoetial Movig Average Pieter P Differece equatio The Differece equatio of a expoetial movig average lter is very simple: y[] x[] + (1 )y[ 1] I this equatio, y[] is the curret output, y[ 1] is the previous
Expoetial Movig Average Pieter P Differece equatio The Differece equatio of a expoetial movig average lter is very simple: y[] x[] + (1 )y[ 1] I this equatio, y[] is the curret output, y[ 1] is the previous
Module 18 Discrete Time Signals and Z-Transforms Objective: Introduction : Description: Discrete Time Signal representation
 Module 8 Discrete Time Sigals ad Z-Trasforms Objective:To uderstad represetig discrete time sigals, apply z trasform for aalyzigdiscrete time sigals ad to uderstad the relatio to Fourier trasform Itroductio
Module 8 Discrete Time Sigals ad Z-Trasforms Objective:To uderstad represetig discrete time sigals, apply z trasform for aalyzigdiscrete time sigals ad to uderstad the relatio to Fourier trasform Itroductio
We are mainly going to be concerned with power series in x, such as. (x)} converges - that is, lims N n
} converges - that is, lims N n") Review of Power Series, Power Series Solutios A power series i x - a is a ifiite series of the form c (x a) =c +c (x a)+(x a) +... We also call this a power series cetered at a. Ex. (x+) is cetered at
Review of Power Series, Power Series Solutios A power series i x - a is a ifiite series of the form c (x a) =c +c (x a)+(x a) +... We also call this a power series cetered at a. Ex. (x+) is cetered at
CHAPTER 10 INFINITE SEQUENCES AND SERIES
 CHAPTER 10 INFINITE SEQUENCES AND SERIES 10.1 Sequeces 10.2 Ifiite Series 10.3 The Itegral Tests 10.4 Compariso Tests 10.5 The Ratio ad Root Tests 10.6 Alteratig Series: Absolute ad Coditioal Covergece
CHAPTER 10 INFINITE SEQUENCES AND SERIES 10.1 Sequeces 10.2 Ifiite Series 10.3 The Itegral Tests 10.4 Compariso Tests 10.5 The Ratio ad Root Tests 10.6 Alteratig Series: Absolute ad Coditioal Covergece
Discrete-Time Systems, LTI Systems, and Discrete-Time Convolution
 EEL5: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we begi our mathematical treatmet of discrete-time s. As show i Figure, a discrete-time operates or trasforms some iput sequece x [
EEL5: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we begi our mathematical treatmet of discrete-time s. As show i Figure, a discrete-time operates or trasforms some iput sequece x [
Ch3 Discrete Time Fourier Transform
 Ch3 Discrete Time Fourier Trasform 3. Show that the DTFT of [] is give by ( k). e k 3. Determie the DTFT of the two sided sigal y [ ],. 3.3 Determie the DTFT of the causal sequece x[ ] A cos( 0 ) [ ],
Ch3 Discrete Time Fourier Trasform 3. Show that the DTFT of [] is give by ( k). e k 3. Determie the DTFT of the two sided sigal y [ ],. 3.3 Determie the DTFT of the causal sequece x[ ] A cos( 0 ) [ ],
Question1 Multiple choices (circle the most appropriate one):
:") Philadelphia Uiversity Studet Name: Faculty of Egieerig Studet Number: Dept. of Computer Egieerig Fial Exam, First Semester: 2014/2015 Course Title: Digital Sigal Aalysis ad Processig Date: 01/02/2015
Philadelphia Uiversity Studet Name: Faculty of Egieerig Studet Number: Dept. of Computer Egieerig Fial Exam, First Semester: 2014/2015 Course Title: Digital Sigal Aalysis ad Processig Date: 01/02/2015
Signal Processing in Mechatronics. Lecture 3, Convolution, Fourier Series and Fourier Transform
 Sigal Processig i Mechatroics Summer semester, 1 Lecture 3, Covolutio, Fourier Series ad Fourier rasform Dr. Zhu K.P. AIS, UM 1 1. Covolutio Covolutio Descriptio of LI Systems he mai premise is that the
Sigal Processig i Mechatroics Summer semester, 1 Lecture 3, Covolutio, Fourier Series ad Fourier rasform Dr. Zhu K.P. AIS, UM 1 1. Covolutio Covolutio Descriptio of LI Systems he mai premise is that the
FIR Filter Design: Part II
 EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we cosider how we might go about desigig FIR filters with arbitrary frequecy resposes, through compositio of multiple sigle-peak
EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we cosider how we might go about desigig FIR filters with arbitrary frequecy resposes, through compositio of multiple sigle-peak
Solutions of Chapter 5 Part 1/2
 Page 1 of 8 Solutios of Chapter 5 Part 1/2 Problem 5.1-1 Usig the defiitio, compute the -trasform of x[] ( 1) (u[] u[ 8]). Sketch the poles ad eros of X[] i the plae. Solutio: Accordig to the defiitio,
Page 1 of 8 Solutios of Chapter 5 Part 1/2 Problem 5.1-1 Usig the defiitio, compute the -trasform of x[] ( 1) (u[] u[ 8]). Sketch the poles ad eros of X[] i the plae. Solutio: Accordig to the defiitio,
CALCULUS BASIC SUMMER REVIEW
 CALCULUS BASIC SUMMER REVIEW NAME rise y y y Slope of a o vertical lie: m ru Poit Slope Equatio: y y m( ) The slope is m ad a poit o your lie is, ). ( y Slope-Itercept Equatio: y m b slope= m y-itercept=
CALCULUS BASIC SUMMER REVIEW NAME rise y y y Slope of a o vertical lie: m ru Poit Slope Equatio: y y m( ) The slope is m ad a poit o your lie is, ). ( y Slope-Itercept Equatio: y m b slope= m y-itercept=
The Z-Transform. (t-t 0 ) Figure 1: Simplified graph of an impulse function. For an impulse, it can be shown that (1)
 Figure 1: Simplified graph of an impulse function. For an impulse, it can be shown that (1)") The Z-Trasform Sampled Data The geeralied fuctio (t) (also kow as the impulse fuctio) is useful i the defiitio ad aalysis of sampled-data sigals. Figure below shows a simplified graph of a impulse. (t-t
The Z-Trasform Sampled Data The geeralied fuctio (t) (also kow as the impulse fuctio) is useful i the defiitio ad aalysis of sampled-data sigals. Figure below shows a simplified graph of a impulse. (t-t
Lesson 10: Limits and Continuity
 www.scimsacademy.com Lesso 10: Limits ad Cotiuity SCIMS Academy 1 Limit of a fuctio The cocept of limit of a fuctio is cetral to all other cocepts i calculus (like cotiuity, derivative, defiite itegrals
www.scimsacademy.com Lesso 10: Limits ad Cotiuity SCIMS Academy 1 Limit of a fuctio The cocept of limit of a fuctio is cetral to all other cocepts i calculus (like cotiuity, derivative, defiite itegrals
CEMTool Tutorial. The z-transform
 CEMTool Tutorial The -Trasform Overview This tutorial is part of the CEMWARE series. Each tutorial i this series will teach you a specific topic of commo applicatios by explaiig theoretical cocepts ad
CEMTool Tutorial The -Trasform Overview This tutorial is part of the CEMWARE series. Each tutorial i this series will teach you a specific topic of commo applicatios by explaiig theoretical cocepts ad
Chapter 10: Power Series
 Chapter : Power Series 57 Chapter Overview: Power Series The reaso series are part of a Calculus course is that there are fuctios which caot be itegrated. All power series, though, ca be itegrated because
Chapter : Power Series 57 Chapter Overview: Power Series The reaso series are part of a Calculus course is that there are fuctios which caot be itegrated. All power series, though, ca be itegrated because
Solution of EECS 315 Final Examination F09
 Solutio of EECS 315 Fial Examiatio F9 1. Fid the umerical value of δ ( t + 4ramp( tdt. δ ( t + 4ramp( tdt. Fid the umerical sigal eergy of x E x = x[ ] = δ 3 = 11 = ( = ramp( ( 4 = ramp( 8 = 8 [ ] = (
Solutio of EECS 315 Fial Examiatio F9 1. Fid the umerical value of δ ( t + 4ramp( tdt. δ ( t + 4ramp( tdt. Fid the umerical sigal eergy of x E x = x[ ] = δ 3 = 11 = ( = ramp( ( 4 = ramp( 8 = 8 [ ] = (
EE / EEE SAMPLE STUDY MATERIAL. GATE, IES & PSUs Signal System. Electrical Engineering. Postal Correspondence Course
 Sigal-EE Postal Correspodece Course 1 SAMPLE STUDY MATERIAL Electrical Egieerig EE / EEE Postal Correspodece Course GATE, IES & PSUs Sigal System Sigal-EE Postal Correspodece Course CONTENTS 1. SIGNAL
Sigal-EE Postal Correspodece Course 1 SAMPLE STUDY MATERIAL Electrical Egieerig EE / EEE Postal Correspodece Course GATE, IES & PSUs Sigal System Sigal-EE Postal Correspodece Course CONTENTS 1. SIGNAL
62. Power series Definition 16. (Power series) Given a sequence {c n }, the series. c n x n = c 0 + c 1 x + c 2 x 2 + c 3 x 3 +
 Given a sequence {c n }, the series. c n x n = c 0 + c 1 x + c 2 x 2 + c 3 x 3 +") 62. Power series Defiitio 16. (Power series) Give a sequece {c }, the series c x = c 0 + c 1 x + c 2 x 2 + c 3 x 3 + is called a power series i the variable x. The umbers c are called the coefficiets of
62. Power series Defiitio 16. (Power series) Give a sequece {c }, the series c x = c 0 + c 1 x + c 2 x 2 + c 3 x 3 + is called a power series i the variable x. The umbers c are called the coefficiets of
Infinite Sequences and Series
 Chapter 6 Ifiite Sequeces ad Series 6.1 Ifiite Sequeces 6.1.1 Elemetary Cocepts Simply speakig, a sequece is a ordered list of umbers writte: {a 1, a 2, a 3,...a, a +1,...} where the elemets a i represet
Chapter 6 Ifiite Sequeces ad Series 6.1 Ifiite Sequeces 6.1.1 Elemetary Cocepts Simply speakig, a sequece is a ordered list of umbers writte: {a 1, a 2, a 3,...a, a +1,...} where the elemets a i represet
Web Appendix O - Derivations of the Properties of the z Transform
 M. J. Roberts - 2/18/07 Web Appedix O - Derivatios of the Properties of the z Trasform O.1 Liearity Let z = x + y where ad are costats. The ( z)= ( x + y )z = x z + y z ad the liearity property is O.2
M. J. Roberts - 2/18/07 Web Appedix O - Derivatios of the Properties of the z Trasform O.1 Liearity Let z = x + y where ad are costats. The ( z)= ( x + y )z = x z + y z ad the liearity property is O.2
ADVANCED DIGITAL SIGNAL PROCESSING
 ADVANCED DIGITAL SIGNAL PROCESSING PROF. S. C. CHAN (email : sccha@eee.hku.hk, Rm. CYC-702) DISCRETE-TIME SIGNALS AND SYSTEMS MULTI-DIMENSIONAL SIGNALS AND SYSTEMS RANDOM PROCESSES AND APPLICATIONS ADAPTIVE
ADVANCED DIGITAL SIGNAL PROCESSING PROF. S. C. CHAN (email : sccha@eee.hku.hk, Rm. CYC-702) DISCRETE-TIME SIGNALS AND SYSTEMS MULTI-DIMENSIONAL SIGNALS AND SYSTEMS RANDOM PROCESSES AND APPLICATIONS ADAPTIVE
MAT 271 Project: Partial Fractions for certain rational functions
 MAT 7 Project: Partial Fractios for certai ratioal fuctios Prerequisite kowledge: partial fractios from MAT 7, a very good commad of factorig ad complex umbers from Precalculus. To complete this project,
MAT 7 Project: Partial Fractios for certai ratioal fuctios Prerequisite kowledge: partial fractios from MAT 7, a very good commad of factorig ad complex umbers from Precalculus. To complete this project,
Appendix: The Laplace Transform
 Appedix: The Laplace Trasform The Laplace trasform is a powerful method that ca be used to solve differetial equatio, ad other mathematical problems. Its stregth lies i the fact that it allows the trasformatio
Appedix: The Laplace Trasform The Laplace trasform is a powerful method that ca be used to solve differetial equatio, ad other mathematical problems. Its stregth lies i the fact that it allows the trasformatio
EECE 301 Signals & Systems
 EECE 301 Sigals & Systems Prof. Mark Fowler Note Set #8 D-T Covolutio: The Tool for Fidig the Zero-State Respose Readig Assigmet: Sectio 2.1-2.2 of Kame ad Heck 1/14 Course Flow Diagram The arrows here
EECE 301 Sigals & Systems Prof. Mark Fowler Note Set #8 D-T Covolutio: The Tool for Fidig the Zero-State Respose Readig Assigmet: Sectio 2.1-2.2 of Kame ad Heck 1/14 Course Flow Diagram The arrows here
APPENDIX F Complex Numbers
 APPENDIX F Complex Numbers Operatios with Complex Numbers Complex Solutios of Quadratic Equatios Polar Form of a Complex Number Powers ad Roots of Complex Numbers Operatios with Complex Numbers Some equatios
APPENDIX F Complex Numbers Operatios with Complex Numbers Complex Solutios of Quadratic Equatios Polar Form of a Complex Number Powers ad Roots of Complex Numbers Operatios with Complex Numbers Some equatios
Finite-length Discrete Transforms. Chapter 5, Sections
 Fiite-legth Discrete Trasforms Chapter 5, Sectios 5.2-50 5.0 Dr. Iyad djafar Outlie The Discrete Fourier Trasform (DFT) Matrix Represetatio of DFT Fiite-legth Sequeces Circular Covolutio DFT Symmetry Properties
Fiite-legth Discrete Trasforms Chapter 5, Sectios 5.2-50 5.0 Dr. Iyad djafar Outlie The Discrete Fourier Trasform (DFT) Matrix Represetatio of DFT Fiite-legth Sequeces Circular Covolutio DFT Symmetry Properties
(A sequence also can be thought of as the list of function values attained for a function f :ℵ X, where f (n) = x n for n 1.) x 1 x N +k x N +4 x 3
 = x n for n 1.) x 1 x N +k x N +4 x 3") MATH 337 Sequeces Dr. Neal, WKU Let X be a metric space with distace fuctio d. We shall defie the geeral cocept of sequece ad limit i a metric space, the apply the results i particular to some special
MATH 337 Sequeces Dr. Neal, WKU Let X be a metric space with distace fuctio d. We shall defie the geeral cocept of sequece ad limit i a metric space, the apply the results i particular to some special
ENGI Series Page 6-01
 ENGI 3425 6 Series Page 6-01 6. Series Cotets: 6.01 Sequeces; geeral term, limits, covergece 6.02 Series; summatio otatio, covergece, divergece test 6.03 Stadard Series; telescopig series, geometric series,
ENGI 3425 6 Series Page 6-01 6. Series Cotets: 6.01 Sequeces; geeral term, limits, covergece 6.02 Series; summatio otatio, covergece, divergece test 6.03 Stadard Series; telescopig series, geometric series,
Chapter 6 Infinite Series
 Chapter 6 Ifiite Series I the previous chapter we cosidered itegrals which were improper i the sese that the iterval of itegratio was ubouded. I this chapter we are goig to discuss a topic which is somewhat
Chapter 6 Ifiite Series I the previous chapter we cosidered itegrals which were improper i the sese that the iterval of itegratio was ubouded. I this chapter we are goig to discuss a topic which is somewhat
Module 2: z-transform and Discrete Systems
 Module : -Trasform ad Discrete Systems Prof. Eliathamy Amikairajah ajah Dr. Tharmarajah Thiruvara School of Electrical Egieerig & Telecommuicatios The Uiversity of New South Wales Australia The -Trasform
Module : -Trasform ad Discrete Systems Prof. Eliathamy Amikairajah ajah Dr. Tharmarajah Thiruvara School of Electrical Egieerig & Telecommuicatios The Uiversity of New South Wales Australia The -Trasform
FIR Filter Design: Part I
 EEL3: Discrete-Time Sigals ad Systems FIR Filter Desig: Part I. Itroductio FIR Filter Desig: Part I I this set o otes, we cotiue our exploratio o the requecy respose o FIR ilters. First, we cosider some
EEL3: Discrete-Time Sigals ad Systems FIR Filter Desig: Part I. Itroductio FIR Filter Desig: Part I I this set o otes, we cotiue our exploratio o the requecy respose o FIR ilters. First, we cosider some
Analog and Digital Signals. Introduction to Digital Signal Processing. Discrete-time Sinusoids. Analog and Digital Signals
 Itroductio to Digital Sigal Processig Chapter : Itroductio Aalog ad Digital Sigals aalog = cotiuous-time cotiuous amplitude digital = discrete-time discrete amplitude cotiuous amplitude discrete amplitude
Itroductio to Digital Sigal Processig Chapter : Itroductio Aalog ad Digital Sigals aalog = cotiuous-time cotiuous amplitude digital = discrete-time discrete amplitude cotiuous amplitude discrete amplitude
Signal Processing. Lecture 02: Discrete Time Signals and Systems. Ahmet Taha Koru, Ph. D. Yildiz Technical University.
 Sigal Processig Lecture 02: Discrete Time Sigals ad Systems Ahmet Taha Koru, Ph. D. Yildiz Techical Uiversity 2017-2018 Fall ATK (YTU) Sigal Processig 2017-2018 Fall 1 / 51 Discrete Time Sigals Discrete
Sigal Processig Lecture 02: Discrete Time Sigals ad Systems Ahmet Taha Koru, Ph. D. Yildiz Techical Uiversity 2017-2018 Fall ATK (YTU) Sigal Processig 2017-2018 Fall 1 / 51 Discrete Time Sigals Discrete
Ma 530 Introduction to Power Series
 Ma 530 Itroductio to Power Series Please ote that there is material o power series at Visual Calculus. Some of this material was used as part of the presetatio of the topics that follow. What is a Power
Ma 530 Itroductio to Power Series Please ote that there is material o power series at Visual Calculus. Some of this material was used as part of the presetatio of the topics that follow. What is a Power
x[0] x[1] x[2] Figure 2.1 Graphical representation of a discrete-time signal.
![x[0] x[1] x[2] Figure 2.1 Graphical representation of a discrete-time signal.](/thumbs/83/88911754.jpg "x[0] x[1] x[2] Figure 2.1 Graphical representation of a discrete-time signal.") x[ ] x[ ] x[] x[] x[] x[] 9 8 7 6 5 4 3 3 4 5 6 7 8 9 Figure. Graphical represetatio of a discrete-time sigal. From Discrete-Time Sigal Processig, e by Oppeheim, Schafer, ad Buck 999- Pretice Hall, Ic.
x[ ] x[ ] x[] x[] x[] x[] 9 8 7 6 5 4 3 3 4 5 6 7 8 9 Figure. Graphical represetatio of a discrete-time sigal. From Discrete-Time Sigal Processig, e by Oppeheim, Schafer, ad Buck 999- Pretice Hall, Ic.
ELEG3503 Introduction to Digital Signal Processing
 ELEG3503 Itroductio to Digital Sigal Processig 1 Itroductio 2 Basics of Sigals ad Systems 3 Fourier aalysis 4 Samplig 5 Liear time-ivariat (LTI) systems 6 z-trasform 7 System Aalysis 8 System Realizatio
ELEG3503 Itroductio to Digital Sigal Processig 1 Itroductio 2 Basics of Sigals ad Systems 3 Fourier aalysis 4 Samplig 5 Liear time-ivariat (LTI) systems 6 z-trasform 7 System Aalysis 8 System Realizatio
Problem Cosider the curve give parametrically as x = si t ad y = + cos t for» t» ß: (a) Describe the path this traverses: Where does it start (whe t =
 Describe the path this traverses: Where does it start (whe t =") Mathematics Summer Wilso Fial Exam August 8, ANSWERS Problem 1 (a) Fid the solutio to y +x y = e x x that satisfies y() = 5 : This is already i the form we used for a first order liear differetial equatio,
Mathematics Summer Wilso Fial Exam August 8, ANSWERS Problem 1 (a) Fid the solutio to y +x y = e x x that satisfies y() = 5 : This is already i the form we used for a first order liear differetial equatio,
Practical Spectral Anaysis (continue) (from Boaz Porat s book) Frequency Measurement
 (from Boaz Porat s book) Frequency Measurement") Practical Spectral Aaysis (cotiue) (from Boaz Porat s book) Frequecy Measuremet Oe of the most importat applicatios of the DFT is the measuremet of frequecies of periodic sigals (eg., siusoidal sigals),
Practical Spectral Aaysis (cotiue) (from Boaz Porat s book) Frequecy Measuremet Oe of the most importat applicatios of the DFT is the measuremet of frequecies of periodic sigals (eg., siusoidal sigals),
Olli Simula T / Chapter 1 3. Olli Simula T / Chapter 1 5
 Sigals ad Systems Sigals ad Systems Sigals are variables that carry iformatio Systemstake sigals as iputs ad produce sigals as outputs The course deals with the passage of sigals through systems T-6.4
Sigals ad Systems Sigals ad Systems Sigals are variables that carry iformatio Systemstake sigals as iputs ad produce sigals as outputs The course deals with the passage of sigals through systems T-6.4
Frequency Domain Filtering
 Frequecy Domai Filterig Raga Rodrigo October 19, 2010 Outlie Cotets 1 Itroductio 1 2 Fourier Represetatio of Fiite-Duratio Sequeces: The Discrete Fourier Trasform 1 3 The 2-D Discrete Fourier Trasform
Frequecy Domai Filterig Raga Rodrigo October 19, 2010 Outlie Cotets 1 Itroductio 1 2 Fourier Represetatio of Fiite-Duratio Sequeces: The Discrete Fourier Trasform 1 3 The 2-D Discrete Fourier Trasform
6.3 Testing Series With Positive Terms
 6.3. TESTING SERIES WITH POSITIVE TERMS 307 6.3 Testig Series With Positive Terms 6.3. Review of what is kow up to ow I theory, testig a series a i for covergece amouts to fidig the i= sequece of partial
6.3. TESTING SERIES WITH POSITIVE TERMS 307 6.3 Testig Series With Positive Terms 6.3. Review of what is kow up to ow I theory, testig a series a i for covergece amouts to fidig the i= sequece of partial
Exam. Notes: A single A4 sheet of paper (double sided; hand-written or computer typed)
") Exam February 8th, 8 Sigals & Systems (5-575-) Prof. R. D Adrea Exam Exam Duratio: 5 Mi Number of Problems: 5 Number of Poits: 5 Permitted aids: Importat: Notes: A sigle A sheet of paper (double sided;
Exam February 8th, 8 Sigals & Systems (5-575-) Prof. R. D Adrea Exam Exam Duratio: 5 Mi Number of Problems: 5 Number of Poits: 5 Permitted aids: Importat: Notes: A sigle A sheet of paper (double sided;
GATE ELECTRONICS & COMMUNICATION
 Eighth Editio GATE ELECTRONICS & COMMUNICATION Sigals ad Systems Vol 7 of 0 RK Kaodia Ashish Murolia NODIA & COMPANY GATE Electroics & Commuicatio Vol 7, 8e Sigals ad Systems RK Kaodia & Ashish Murolia
Eighth Editio GATE ELECTRONICS & COMMUNICATION Sigals ad Systems Vol 7 of 0 RK Kaodia Ashish Murolia NODIA & COMPANY GATE Electroics & Commuicatio Vol 7, 8e Sigals ad Systems RK Kaodia & Ashish Murolia
University of California at Berkeley College of Engineering Department of Electrical Engineering and Computer Sciences
 A Uiversity of Califoria at Berkeley College of Egieerig Departmet of Electrical Egieerig ad Computer Scieces U N I V E R S T H E I T Y O F LE T TH E R E B E LI G H T C A L I F O R N 8 6 8 I A EECS : Sigals
A Uiversity of Califoria at Berkeley College of Egieerig Departmet of Electrical Egieerig ad Computer Scieces U N I V E R S T H E I T Y O F LE T TH E R E B E LI G H T C A L I F O R N 8 6 8 I A EECS : Sigals
Most text will write ordinary derivatives using either Leibniz notation 2 3. y + 5y= e and y y. xx tt t
 Itroductio to Differetial Equatios Defiitios ad Termiolog Differetial Equatio: A equatio cotaiig the derivatives of oe or more depedet variables, with respect to oe or more idepedet variables, is said
Itroductio to Differetial Equatios Defiitios ad Termiolog Differetial Equatio: A equatio cotaiig the derivatives of oe or more depedet variables, with respect to oe or more idepedet variables, is said
Sequences A sequence of numbers is a function whose domain is the positive integers. We can see that the sequence
 Sequeces A sequece of umbers is a fuctio whose domai is the positive itegers. We ca see that the sequece 1, 1, 2, 2, 3, 3,... is a fuctio from the positive itegers whe we write the first sequece elemet
Sequeces A sequece of umbers is a fuctio whose domai is the positive itegers. We ca see that the sequece 1, 1, 2, 2, 3, 3,... is a fuctio from the positive itegers whe we write the first sequece elemet
PAPER : IIT-JAM 2010
 MATHEMATICS-MA (CODE A) Q.-Q.5: Oly oe optio is correct for each questio. Each questio carries (+6) marks for correct aswer ad ( ) marks for icorrect aswer.. Which of the followig coditios does NOT esure
MATHEMATICS-MA (CODE A) Q.-Q.5: Oly oe optio is correct for each questio. Each questio carries (+6) marks for correct aswer ad ( ) marks for icorrect aswer.. Which of the followig coditios does NOT esure
Filter banks. Separately, the lowpass and highpass filters are not invertible. removes the highest frequency 1/ 2and
 Filter bas Separately, the lowpass ad highpass filters are ot ivertible T removes the highest frequecy / ad removes the lowest frequecy Together these filters separate the sigal ito low-frequecy ad high-frequecy
Filter bas Separately, the lowpass ad highpass filters are ot ivertible T removes the highest frequecy / ad removes the lowest frequecy Together these filters separate the sigal ito low-frequecy ad high-frequecy
Appendix F: Complex Numbers
 Appedix F Complex Numbers F1 Appedix F: Complex Numbers Use the imagiary uit i to write complex umbers, ad to add, subtract, ad multiply complex umbers. Fid complex solutios of quadratic equatios. Write
Appedix F Complex Numbers F1 Appedix F: Complex Numbers Use the imagiary uit i to write complex umbers, ad to add, subtract, ad multiply complex umbers. Fid complex solutios of quadratic equatios. Write
Chapter 8. DFT : The Discrete Fourier Transform
 Chapter 8 DFT : The Discrete Fourier Trasform Roots of Uity Defiitio: A th root of uity is a complex umber x such that x The th roots of uity are: ω, ω,, ω - where ω e π /. Proof: (ω ) (e π / ) (e π )
Chapter 8 DFT : The Discrete Fourier Trasform Roots of Uity Defiitio: A th root of uity is a complex umber x such that x The th roots of uity are: ω, ω,, ω - where ω e π /. Proof: (ω ) (e π / ) (e π )
TEACHER CERTIFICATION STUDY GUIDE
 COMPETENCY 1. ALGEBRA SKILL 1.1 1.1a. ALGEBRAIC STRUCTURES Kow why the real ad complex umbers are each a field, ad that particular rigs are ot fields (e.g., itegers, polyomial rigs, matrix rigs) Algebra
COMPETENCY 1. ALGEBRA SKILL 1.1 1.1a. ALGEBRAIC STRUCTURES Kow why the real ad complex umbers are each a field, ad that particular rigs are ot fields (e.g., itegers, polyomial rigs, matrix rigs) Algebra
G r a d e 1 1 P r e - C a l c u l u s M a t h e m a t i c s ( 3 0 S )
") G r a d e 1 1 P r e - C a l c u l u s M a t h e m a t i c s ( 3 0 S ) Grade 11 Pre-Calculus Mathematics (30S) is desiged for studets who ited to study calculus ad related mathematics as part of post-secodary
G r a d e 1 1 P r e - C a l c u l u s M a t h e m a t i c s ( 3 0 S ) Grade 11 Pre-Calculus Mathematics (30S) is desiged for studets who ited to study calculus ad related mathematics as part of post-secodary
Quiz. Use either the RATIO or ROOT TEST to determine whether the series is convergent or not.
 Quiz. Use either the RATIO or ROOT TEST to determie whether the series is coverget or ot. e .6 POWER SERIES Defiitio. A power series i about is a series of the form c 0 c a c a... c a... a 0 c a where
Quiz. Use either the RATIO or ROOT TEST to determie whether the series is coverget or ot. e .6 POWER SERIES Defiitio. A power series i about is a series of the form c 0 c a c a... c a... a 0 c a where
SOLUTIONS TO EXAM 3. Solution: Note that this defines two convergent geometric series with respective radii r 1 = 2/5 < 1 and r 2 = 1/5 < 1.
 SOLUTIONS TO EXAM 3 Problem Fid the sum of the followig series 2 + ( ) 5 5 2 5 3 25 2 2 This series diverges Solutio: Note that this defies two coverget geometric series with respective radii r 2/5 < ad
SOLUTIONS TO EXAM 3 Problem Fid the sum of the followig series 2 + ( ) 5 5 2 5 3 25 2 2 This series diverges Solutio: Note that this defies two coverget geometric series with respective radii r 2/5 < ad
AP Calculus Chapter 9: Infinite Series
 AP Calculus Chapter 9: Ifiite Series 9. Sequeces a, a 2, a 3, a 4, a 5,... Sequece: A fuctio whose domai is the set of positive itegers = 2 3 4 a = a a 2 a 3 a 4 terms of the sequece Begi with the patter
AP Calculus Chapter 9: Ifiite Series 9. Sequeces a, a 2, a 3, a 4, a 5,... Sequece: A fuctio whose domai is the set of positive itegers = 2 3 4 a = a a 2 a 3 a 4 terms of the sequece Begi with the patter
A sequence of numbers is a function whose domain is the positive integers. We can see that the sequence
 Sequeces A sequece of umbers is a fuctio whose domai is the positive itegers. We ca see that the sequece,, 2, 2, 3, 3,... is a fuctio from the positive itegers whe we write the first sequece elemet as
Sequeces A sequece of umbers is a fuctio whose domai is the positive itegers. We ca see that the sequece,, 2, 2, 3, 3,... is a fuctio from the positive itegers whe we write the first sequece elemet as
Polynomial Functions and Their Graphs
 Polyomial Fuctios ad Their Graphs I this sectio we begi the study of fuctios defied by polyomial expressios. Polyomial ad ratioal fuctios are the most commo fuctios used to model data, ad are used extesively
Polyomial Fuctios ad Their Graphs I this sectio we begi the study of fuctios defied by polyomial expressios. Polyomial ad ratioal fuctios are the most commo fuctios used to model data, ad are used extesively
2D DSP Basics: 2D Systems
 - Digital Image Processig ad Compressio D DSP Basics: D Systems D Systems T[ ] y = T [ ] Liearity Additivity: If T y = T [ ] The + T y = y + y Homogeeity: If The T y = T [ ] a T y = ay = at [ ] Liearity
- Digital Image Processig ad Compressio D DSP Basics: D Systems D Systems T[ ] y = T [ ] Liearity Additivity: If T y = T [ ] The + T y = y + y Homogeeity: If The T y = T [ ] a T y = ay = at [ ] Liearity
Zeros of Polynomials
 Math 160 www.timetodare.com 4.5 4.6 Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered with fidig the solutios of polyomial equatios of ay degree
Math 160 www.timetodare.com 4.5 4.6 Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered with fidig the solutios of polyomial equatios of ay degree
DIGITAL SIGNAL PROCESSING LECTURE 3
 DIGITAL SIGNAL PROCESSING LECTURE 3 Fall 2 2K8-5 th Semester Tahir Muhammad tmuhammad_7@yahoo.com Cotet ad Figures are from Discrete-Time Sigal Processig, 2e by Oppeheim, Shafer, ad Buc, 999-2 Pretice
DIGITAL SIGNAL PROCESSING LECTURE 3 Fall 2 2K8-5 th Semester Tahir Muhammad tmuhammad_7@yahoo.com Cotet ad Figures are from Discrete-Time Sigal Processig, 2e by Oppeheim, Shafer, ad Buc, 999-2 Pretice
Discrete-time signals and systems See Oppenheim and Schafer, Second Edition pages 8 93, or First Edition pages 8 79.
 Discrete-time sigals ad systems See Oppeheim ad Schafer, Secod Editio pages 93, or First Editio pages 79. Discrete-time sigals A discrete-time sigal is represeted as a sequece of umbers: x D fxœg; <
Discrete-time sigals ad systems See Oppeheim ad Schafer, Secod Editio pages 93, or First Editio pages 79. Discrete-time sigals A discrete-time sigal is represeted as a sequece of umbers: x D fxœg; <
Digital signal processing: Lecture 5. z-transformation - I. Produced by Qiangfu Zhao (Since 1995), All rights reserved
, All rights reserved") Digital sigal processig: Lecture 5 -trasformatio - I Produced by Qiagfu Zhao Sice 995, All rights reserved DSP-Lec5/ Review of last lecture Fourier trasform & iverse Fourier trasform: Time domai & Frequecy
Digital sigal processig: Lecture 5 -trasformatio - I Produced by Qiagfu Zhao Sice 995, All rights reserved DSP-Lec5/ Review of last lecture Fourier trasform & iverse Fourier trasform: Time domai & Frequecy
Discrete-Time Signals and Systems. Signals and Systems. Digital Signals. Discrete-Time Signals. Operations on Sequences: Basic Operations
 -6.3 Digital Sigal Processig ad Filterig..8 Discrete-ime Sigals ad Systems ime-domai Represetatios of Discrete-ime Sigals ad Systems ime-domai represetatio of a discrete-time sigal as a sequece of umbers
-6.3 Digital Sigal Processig ad Filterig..8 Discrete-ime Sigals ad Systems ime-domai Represetatios of Discrete-ime Sigals ad Systems ime-domai represetatio of a discrete-time sigal as a sequece of umbers
Ma 530 Infinite Series I
 Ma 50 Ifiite Series I Please ote that i additio to the material below this lecture icorporated material from the Visual Calculus web site. The material o sequeces is at Visual Sequeces. (To use this li
Ma 50 Ifiite Series I Please ote that i additio to the material below this lecture icorporated material from the Visual Calculus web site. The material o sequeces is at Visual Sequeces. (To use this li
Chapter 6 Overview: Sequences and Numerical Series. For the purposes of AP, this topic is broken into four basic subtopics:
 Chapter 6 Overview: Sequeces ad Numerical Series I most texts, the topic of sequeces ad series appears, at first, to be a side topic. There are almost o derivatives or itegrals (which is what most studets
Chapter 6 Overview: Sequeces ad Numerical Series I most texts, the topic of sequeces ad series appears, at first, to be a side topic. There are almost o derivatives or itegrals (which is what most studets
Complex Numbers Solutions
 Complex Numbers Solutios Joseph Zoller February 7, 06 Solutios. (009 AIME I Problem ) There is a complex umber with imagiary part 64 ad a positive iteger such that Fid. [Solutio: 697] 4i + + 4i. 4i 4i
Complex Numbers Solutios Joseph Zoller February 7, 06 Solutios. (009 AIME I Problem ) There is a complex umber with imagiary part 64 ad a positive iteger such that Fid. [Solutio: 697] 4i + + 4i. 4i 4i
Chapter 7: Numerical Series
 Chapter 7: Numerical Series Chapter 7 Overview: Sequeces ad Numerical Series I most texts, the topic of sequeces ad series appears, at first, to be a side topic. There are almost o derivatives or itegrals
Chapter 7: Numerical Series Chapter 7 Overview: Sequeces ad Numerical Series I most texts, the topic of sequeces ad series appears, at first, to be a side topic. There are almost o derivatives or itegrals
f(x) dx as we do. 2x dx x also diverges. Solution: We compute 2x dx lim
 dx as we do. 2x dx x also diverges. Solution: We compute 2x dx lim") Math 3, Sectio 2. (25 poits) Why we defie f(x) dx as we do. (a) Show that the improper itegral diverges. Hece the improper itegral x 2 + x 2 + b also diverges. Solutio: We compute x 2 + = lim b x 2 + =
Math 3, Sectio 2. (25 poits) Why we defie f(x) dx as we do. (a) Show that the improper itegral diverges. Hece the improper itegral x 2 + x 2 + b also diverges. Solutio: We compute x 2 + = lim b x 2 + =
6.003: Signals and Systems. Feedback, Poles, and Fundamental Modes
 6.003: Sigals ad Systems Feedback, Poles, ad Fudametal Modes February 9, 2010 Last Time: Multiple Represetatios of DT Systems Verbal descriptios: preserve the ratioale. To reduce the umber of bits eeded
6.003: Sigals ad Systems Feedback, Poles, ad Fudametal Modes February 9, 2010 Last Time: Multiple Represetatios of DT Systems Verbal descriptios: preserve the ratioale. To reduce the umber of bits eeded
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science. BACKGROUND EXAM September 30, 2004.
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Departmet of Electrical Egieerig ad Computer Sciece 6.34 Discrete Time Sigal Processig Fall 24 BACKGROUND EXAM September 3, 24. Full Name: Note: This exam is closed
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Departmet of Electrical Egieerig ad Computer Sciece 6.34 Discrete Time Sigal Processig Fall 24 BACKGROUND EXAM September 3, 24. Full Name: Note: This exam is closed
Apply change-of-basis formula to rewrite x as a linear combination of eigenvectors v j.
 Eigevalue-Eigevector Istructor: Nam Su Wag eigemcd Ay vector i real Euclidea space of dimesio ca be uiquely epressed as a liear combiatio of liearly idepedet vectors (ie, basis) g j, j,,, α g α g α g α
Eigevalue-Eigevector Istructor: Nam Su Wag eigemcd Ay vector i real Euclidea space of dimesio ca be uiquely epressed as a liear combiatio of liearly idepedet vectors (ie, basis) g j, j,,, α g α g α g α
Lecture 8: Solving the Heat, Laplace and Wave equations using finite difference methods
 Itroductory lecture otes o Partial Differetial Equatios - c Athoy Peirce. Not to be copied, used, or revised without explicit writte permissio from the copyright ower. 1 Lecture 8: Solvig the Heat, Laplace
Itroductory lecture otes o Partial Differetial Equatios - c Athoy Peirce. Not to be copied, used, or revised without explicit writte permissio from the copyright ower. 1 Lecture 8: Solvig the Heat, Laplace
3 Gauss map and continued fractions
 ICTP, Trieste, July 08 Gauss map ad cotiued fractios I this lecture we will itroduce the Gauss map, which is very importat for its coectio with cotiued fractios i umber theory. The Gauss map G : [0, ]
ICTP, Trieste, July 08 Gauss map ad cotiued fractios I this lecture we will itroduce the Gauss map, which is very importat for its coectio with cotiued fractios i umber theory. The Gauss map G : [0, ]
The Phi Power Series
 The Phi Power Series I did this work i about 0 years while poderig the relatioship betwee the golde mea ad the Madelbrot set. I have fially decided to make it available from my blog at http://semresearch.wordpress.com/.
The Phi Power Series I did this work i about 0 years while poderig the relatioship betwee the golde mea ad the Madelbrot set. I have fially decided to make it available from my blog at http://semresearch.wordpress.com/.
3.2 Properties of Division 3.3 Zeros of Polynomials 3.4 Complex and Rational Zeros of Polynomials
 Math 60 www.timetodare.com 3. Properties of Divisio 3.3 Zeros of Polyomials 3.4 Complex ad Ratioal Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered
Math 60 www.timetodare.com 3. Properties of Divisio 3.3 Zeros of Polyomials 3.4 Complex ad Ratioal Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered